
Скетч для робота на плате Arduino nano
Задание 1. Описание «Движение робота вперед, назад»
Мы предполагаем, что владелец конструктора уже знаком с контроллером Arduino и средой проектирования Arduino IDE. Скачать и установить программу Arduino IDE можно по ссылке: https://www.arduino.cc/.
В гнезда блока управления R-5 устанавливается контроллер Arduino Nano. Поэтому и в настройках среды разработки Arduino IDE необходимо выбрать именно этот контроллер с процессором AT mega 328.
Теперь уже приступаем непосредственно к программированию.
Программа для контроллера Ардуино обычно состоит из трёх частей.
В первой части, как в обычной математической задаче, описываются исходные данные. Мы присваиваем названия, назначение, функционал контактов контроллера. Записываем, какие библиотеки мы будем использовать в ходе выполнения программы.
Во второй части с названием Setup пишем уже непосредственно код программы.
И третья часть программы loop представляет собой команды, которые исполняются процессором в течение всего периода работы процессора.
Рассмотрим простой пример кода для движения робота.
В первой части кода мы определяем, какими контактами платы Arduino мы будем управлять драйвером и, соответственно, электромоторами, придумаем название команд, чтобы нам было понятно их назначение.
В блоке R-5 контакты Arduino жёстко подключены к входам драйвера.
Давайте посмотрим на рисунок ниже:
M_R_IN – вход драйвера, управляющий направлением вращения правого электромотора. Высокий уровень (HIGHT) – вращение вперед.
M_R_EN – вход драйвера, разрешающий вращение правого электромотора. Высокий уровень (HIGHT) разрешает вращение. При подаче на вход сигнала с широтно-импульсной модуляцией (ШИМ, PWM) вход управляет скоростью вращения.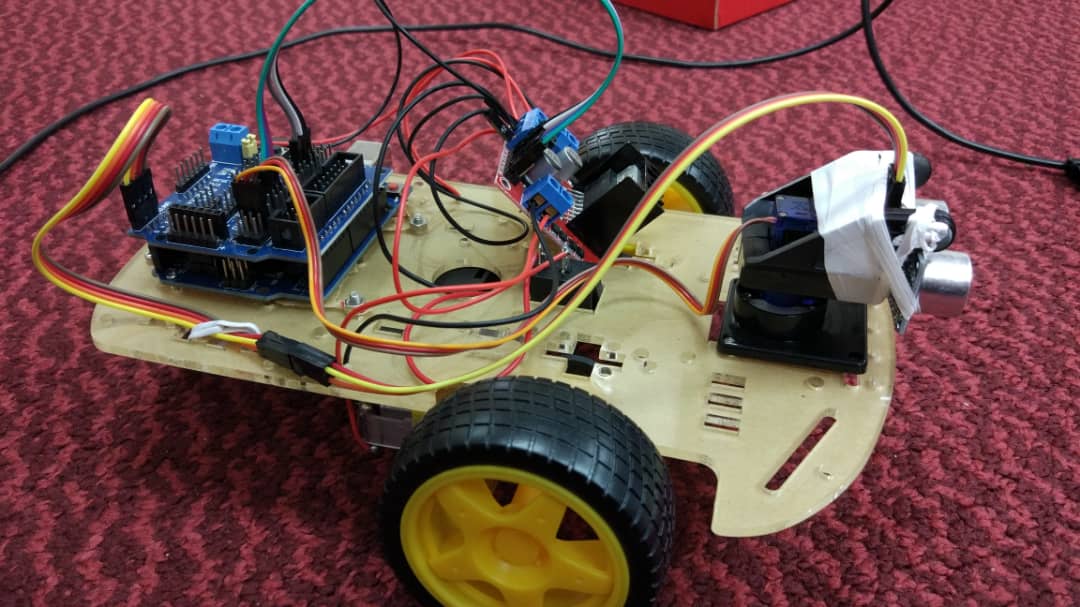
M_L_IN – вход драйвера, управляющий направлением вращения левого электромотора. Высокий уровень (HIGHT) – вращение вперед.
M_L_IN – вход драйвера, разрешающий вращение левого электромотора. Высокий уровень (HIGHT) разрешает вращение. При подаче на вход сигнала с широтно-импульсной модуляцией (ШИМ, PWM) вход управляет скоростью вращения.
И у нас получается следующее:
Контакт Ардуино 2 – направление вращения правого мотора.
Контакт Арудино 3 – разрешение вращения правого мотора. При работе ШИМ – регулировка скорости вращения.
Контакт Ардуино 4 – направление вращения левого мотора.
Контакт Ардуино 5 – разрешение вращения левого мотора. При работе ШИМ – регулировка скорости вращения.
Пишем код. Код здесь.
Скопируйте текст программы и вставьте его в Arduino IDE.
После копирования обязательно проверьте, чтобы комментарии в каждой строчке начинались с двух символов //.
После проверки загрузите код в контроллер. Установите контроллер в блок R-5 и включите питание робота.
Наш робот, исполняя написанный выше скетч, должен в течение одной секунды ехать вперёд, затем на секунду остановиться и начать движение назад. И так как команда loop исполняется постоянно, то робот будет выполнять эти команды, пока включено питание.
Робот на Ардуино и машинка на Bluetooth своими руками
Робот – машинка на Ардуино становятся одним из самым популярных инженерных проектов в школьной робототехнике. Именно с таких устройств, автономных или управляемых со смартфона и bluetooth, начинается путь в робототехнику “после Lego”. К счастью, сегодня можно без труда купить все необходимые компоненты и достаточно быстро создать своего первого робота для езды по линии или объезда препятствий. В этой статье вы найдете подробную видео инструкцию как сделать продвинутый автомобиль Arduino Car своими руками, с питанием, датчиками линии, расстояния и управлении через bluetooth.
Робот на ардуино своими руками
В отличие от других проектов, создание робота – автомобиля (Arduino Car) требует понимания и навыков работы сразу с несколькими важными компонентами, поэтому не стоит приступать к созданию машинок без получения базовых навыков работы с платформой Arduino.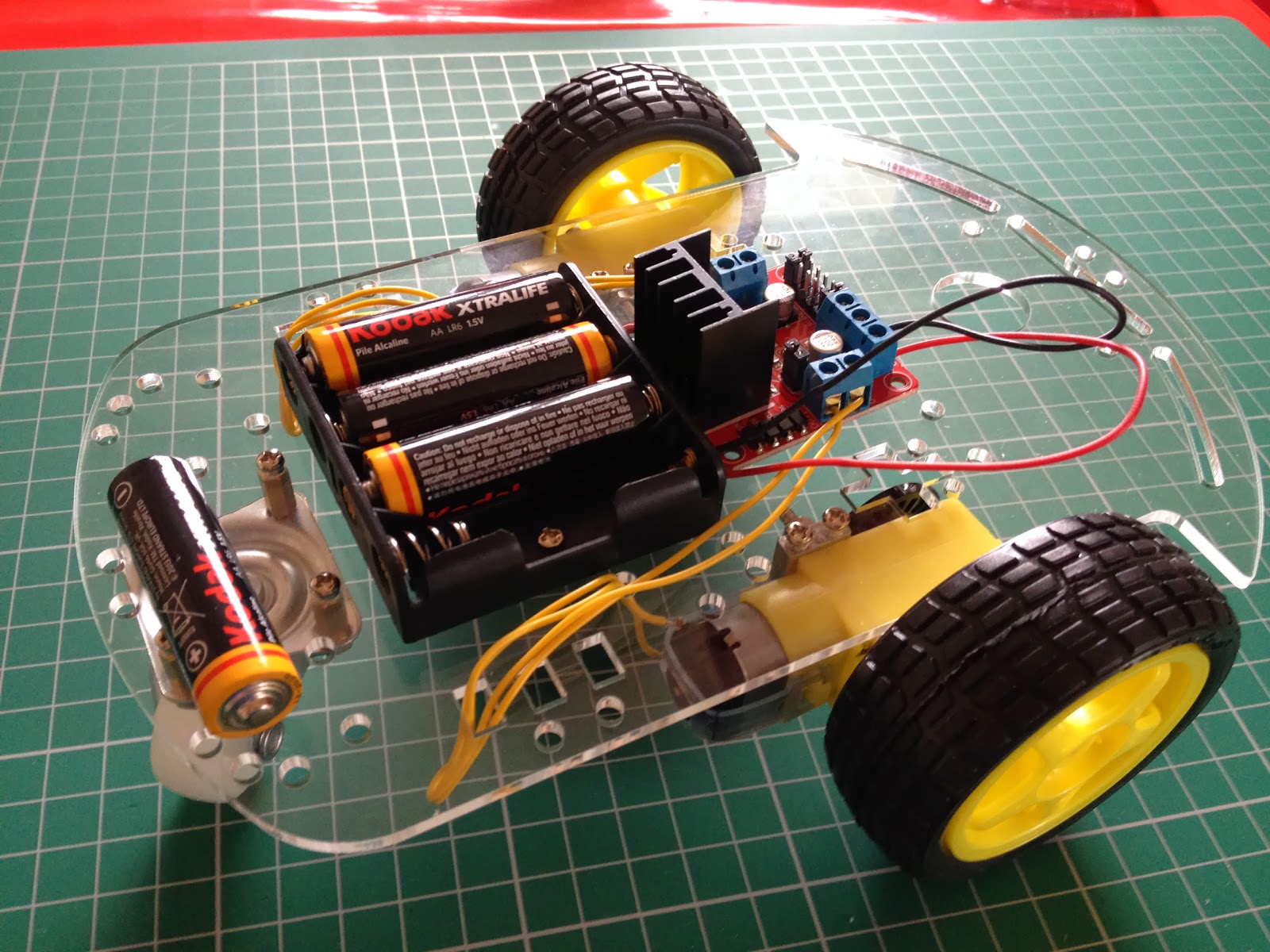 В любом случае, вам нужно будет но только подключить готовые модули, но и собрать конструкцию, шасси с двигателями, обеспечить правильное питание и управление. Все это потребует определенного терпения.
В любом случае, вам нужно будет но только подключить готовые модули, но и собрать конструкцию, шасси с двигателями, обеспечить правильное питание и управление. Все это потребует определенного терпения.
Вот список ключевых компонентов, которые обязательно встретятся в проекте.
Контроллер Ардуино
Куда уж без него, если мы говорим о проектах на этой платформе. Как правило, роботы машины делают на базе плат Arduino Uno и Nano. Mega будут слишком большие, Pro Mini сложнее подключать к компьютеру и соединять с остальными компонентами, а Leonardo требуют дополнительных навыков в программировании, они дороже и их основное преимущество (тесная интеграция с компьютером в качестве периферийного устройства) в данном случае не слишком востребована.
Есть еще вариант использования плат ESP8266 или ESP32, тогда в проекте появляется возможность управления машиной через WiFi. Но и сами платы и их программирование требует определенных навыков, в этой статье мы будем говорить преимущественно об Uno или Nano.
Конструкция, шасси и двигатели робота на Ардуино
Для того, чтобы что-то поехало или стало перемещаться, надо снабдить “это” колесами, гусеницами или манипуляторами-ногами. Вот тут выбор совершенно не ограничен, можно использовать совершенно любые комбинации и сочетания платформ. Как правило, в качестве начального варианта берутся уже готовые наборы платформ с Алиэкспресс.
Двигатель, шасси и колеса машинки на ардуиноЕсли работать со стандартными наборами вам не интересно, можно создать платформу своими руками. Например, разобрать игрушечные радиоуправляемые машинки или любые двигатели на 5-12 вольт, с редукторами или без. Колеса можно создать и самим, что тоже является интересной задачей.
Драйвер двигателей
Драйвер двигателя L298NАрдуино – достаточно ранимое устройство, не терпящее больших нагрузок по току. Соединяя его с “брутальными” мощными двигателями, не избежать беды. Поэтому для нормальной совместной работы нам нужно будет включить в схему робота компонент, отвечающий за управление двигателями – подающий и отключающий ток на их обмотки. Речь идет о микросхеме или готовом модуле, которые называют драйвером двигателя. На нашем сайте есть статьи, посвященные драйверам, построенным на схеме H-моста. Если вы покупаете готовые шасси, то обязательно предусмотрите возможность размещения на них подходящего драйвера.
Речь идет о микросхеме или готовом модуле, которые называют драйвером двигателя. На нашем сайте есть статьи, посвященные драйверам, построенным на схеме H-моста. Если вы покупаете готовые шасси, то обязательно предусмотрите возможность размещения на них подходящего драйвера.
Красивый корпус
Как правило, вся конструкция автомобиля строится вокруг его шасси. Если посмотреть примеры готовых проектов, то они часто выглядят как “провода на колесиках” – внешний вид их изобилует пучками соединительных проводов, ведущих от восседающего на троне контроллера Ардуино к драйверам, моторам и датчикам. Между тем, красивый и функциональный корпус не только вызывает правильные эстетические чувства и помогает выделить вашу модель от остальных. Хороший корпус может превратить игрушку в реальное устройство, помогает привить навыки конструирования и промышленного дизайна, что важно для инженеров любого возраста.
Питание робота
Обеспечение правильной схемы питания – это то, что очень часто оказывается на последнем месте в списке приоритетов начинающих ардуинщиков.
Создавая по-настоящему автономное устройство робота, нужно побеспокоиться и о времени его работы, и о возможности быстрой подзарядки или смены батареек. Как правило, выбираются решения из следующих вариантов:
- Обычные батарейки AA. Тут нужно понимать, что платы Arduino Uno, Nano и большинство двигателей, используемых в Ардуино-робототехнике, требуют напряжения в диапазоне 6-9 вольт. Поэтому придется собрать вместе последовательно не менее 4 батареек на 1,5 В, причем сами батарейки должны быть хорошего качества и обеспечивать работу с достаточно большим током.

- Аккумулятор AA. Здесь возникает еще большее ограничение по напряжению и току. Большинство аккумуляторов выдают напряжение 1,2 вольт, поэтому их требуется больше для “собирания” нужных нам 6-9 вольт. Несомненным плюсом является возможность перезарядки.
- Литиевые аккумуляторы 18650. Это уже “серьезная артиллерия”, позволяющая получить большое время автономной работы, возможность подзарядки и приемлемые характеристики по току и напряжению. Рабочее напряжение для таких элементов питания – 3,7 В, что позволяет собирать готовую схему питания всего из двух элементов.
- Другие источники питания. Сюда можно включить как более мощные и габаритные никель-металлгидридные, кадмиевые аккумуляторы, так и многочисленные литий-ионные “плоские” варианты, используемые в дронах, смартфонах или другой портативной цифровой технике.
Каким бы ни был источник питания, нужно обеспечить его надежное крепление, удобное расположение, защиту от воздействия недружелюбной окружающей среды. Если вы подключаете к одному источнику и контролер, и двигатели, и датчики, то нужно позаботиться о правильной схеме, включающей, например, надежную связь “по земле” всех устройств.
Где купить платформу и запчасти
Все, о чем говорится в этой статье, можно без проблем купить на всем известном сайте. К сожалению, подавляющее большинство предложений основываются на стандартной платформе 4WD автомобиля с двумя несущими планками, не очень надежными двигателями и колесами, любящими ездить в “развалочку”. Но эти варианты относительно не дороги и вполне подойдут для начала работы.
Инструкция по сборке робота-автомобиля
В этой статье расскажем вам о том, как по шагам собрать универсального робота на колесной или гусеничной платформе. Управлять им будет микроконтроллер Ардуино нано. Если вам не нравится долго читать, посмотрите в конце статьи на видео, подготовленное нашими партнерами – каналом ArduMast Club.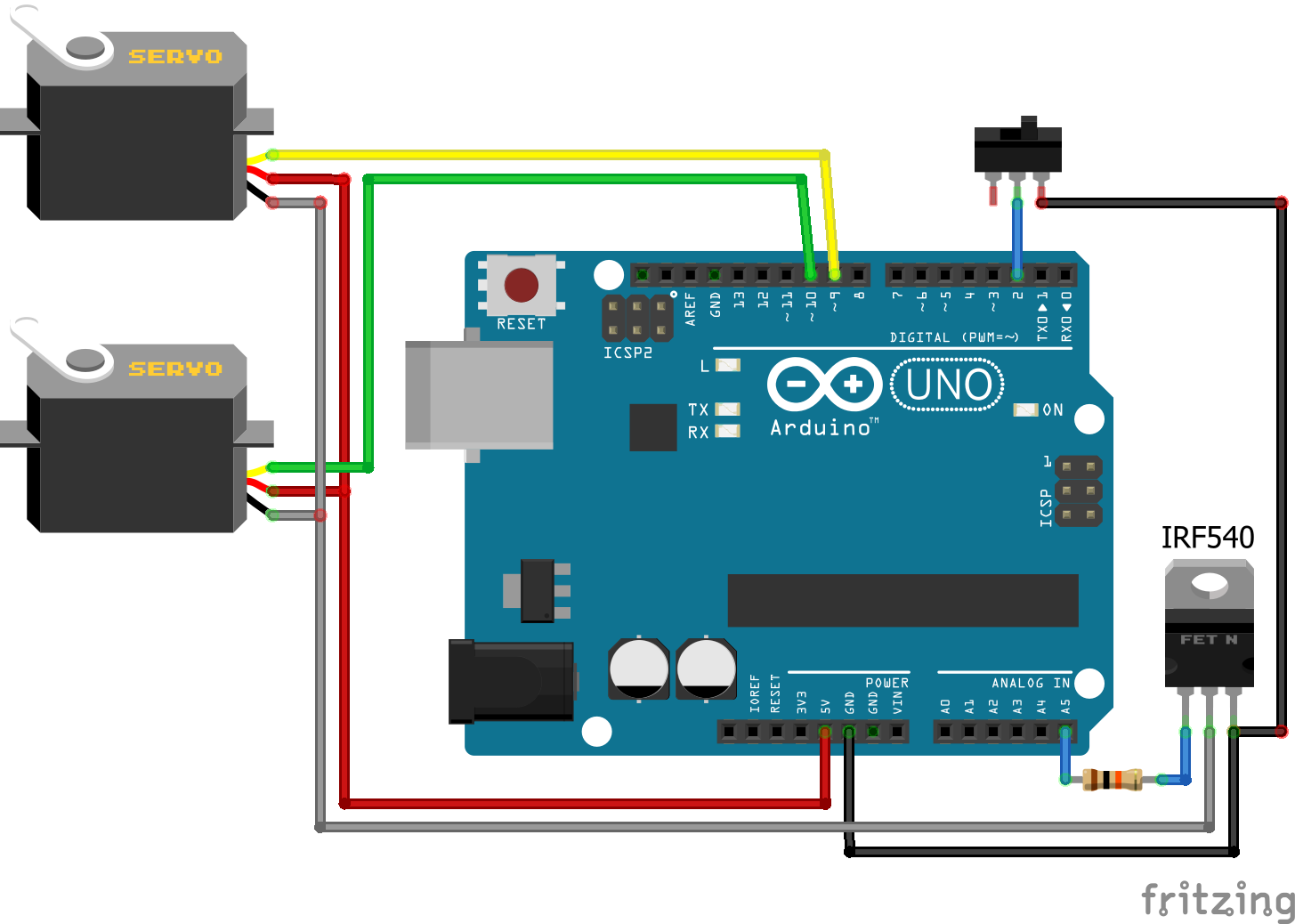
Пример платформы робота-машины на Ардуино
Предлагаем инструкцию по созданию универсальной платформы, которая потом пригодится для создания самых разных проектов, независимо от выбранного контролера или типа шасси. Вы можете использовать стандартные варианты из Алиэкспресса, как на видео, можете снабдить машину гусеницами и создать вездеход, можете придумать вообще ни на что не похожий вариант. Главное, чтобы число двигателей не превышало 4 и сами ни не были слишком мощными (тогда придется менять тип управления моторами – другой драйвер двигателя).
Робот на АрдуиноДля реализации проекта нам понадобится:
- Контроллер Ардуино (в нашем случае, Arduino Nano).
- Драйвер двигателя L298N.
- Двигатели с редукторами.
- Корпус и шасси для крепления колес и оборудования
- Корпус для аккумуляторов 18650 с выключателем.
- Коммутационные провода.
Дополнительное оборудование, которое потребуется для создания полноценного проекта:
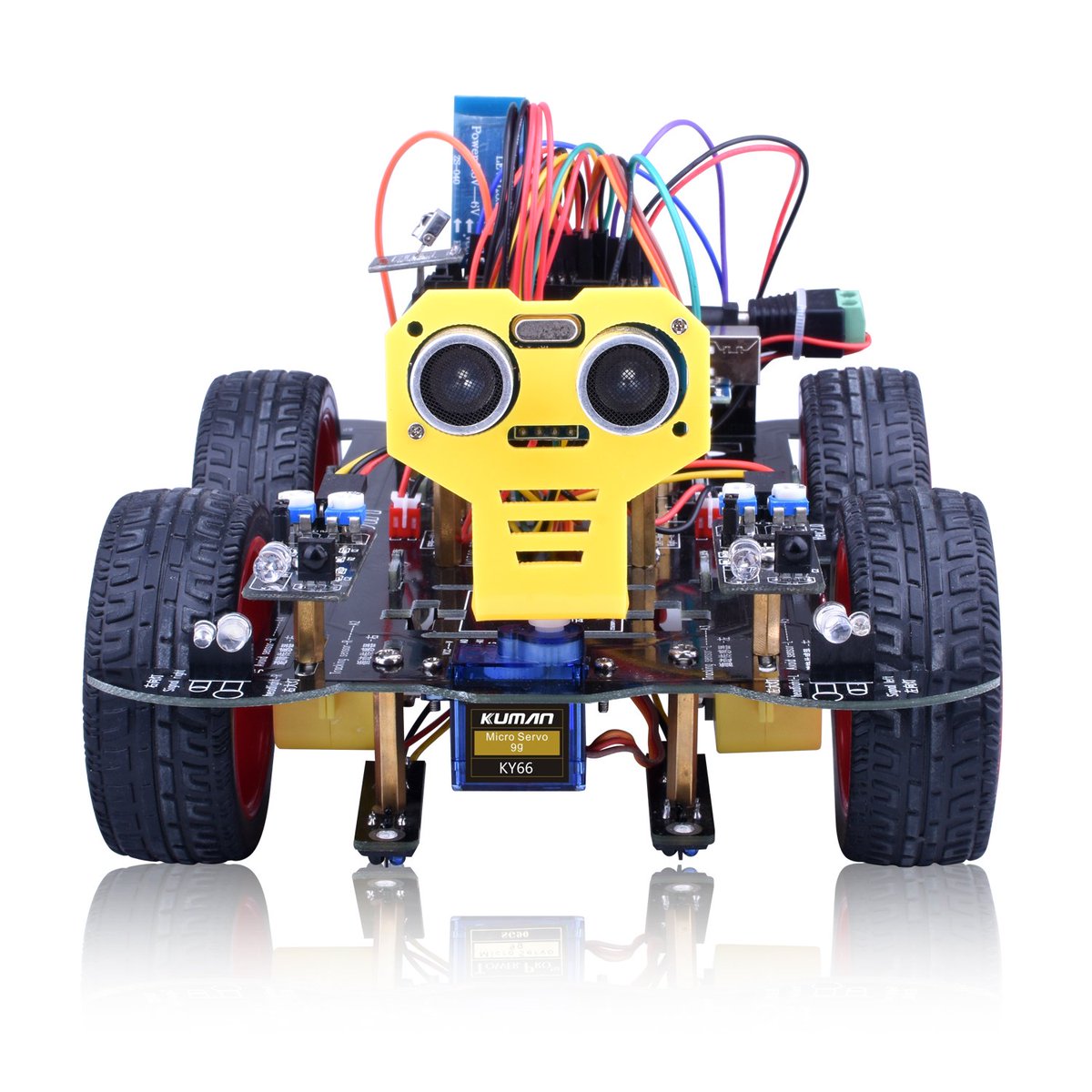
- Датчик расстояния и серво-мотор, на который он установлен.

- Инфракрасные датчики линии.
- Светодиоды для индикации и “красоты”.
- Пьезодинамик – пищалка.
- Bluetooth модуль (если собираетесь управлять машинкой дистанционно).
- Sensor shield (упрощает коммутацию).
- Модуль контроля заряда и подзарядки аккумуляторов.
- Сами аккумуляторы.
Общая схема машинки на Ардуино
Схема электропитания робота автомобиля
Вопрос организации правильного стабильного электропитания является одним из самых важных в любом проекте.В нашей модели применена рекомендованная нами схема питания, основанная на использовании литийионных аккумуляторов формата 18650 и платы защиты их от переразряда и перезаряда.
Давайте разберем самый простой вариант схемы питания электромоторов. Перед началом сборки лучше заранее припаять провода к моторам.
Схема питания и подключения двигателей в ардуино автомобилеВсе достаточно стандартно и вы найдете в интернете десятки подобных примеров. Но в этой схеме есть большой минус – в случае полного разряда аккумуляторы придут в негодность.
Для добавления контроллера разряда придется внести следующие изменения в схему:
Схема питания с контролем разряда аккумулятораТеперь аккумуляторы будут защищены, но здесь нет возможности заряжать их.
Питание робота АрдуиноДля зарядки можно использовать модуль повышения напряжения с 5v до необходимого уровня зарядки, который зависит от количества серий используемых аккумуляторов. Он имеет гнездо типа микро USB и при частом использовании оно может сломаться, поэтому мы рекомендуем установить дополнительное гнездо для последующей подзарядки пяти вольтовым блоком питания. Для зарядки двух литий-ионных аккумуляторов необходимо настроить выходное напряжение на 8,4 Вольта.
Схема питания с модулем зарядки для ардуино робота машинкиПодключаем двигатели и плату
С питанием платформы мы разобрались, теперь подключим остальные компоненты. Для начала припаиваем провода к моторам, затем обматываем их изолентой, чтобы случайно в дальнейшем не оторвать контакты.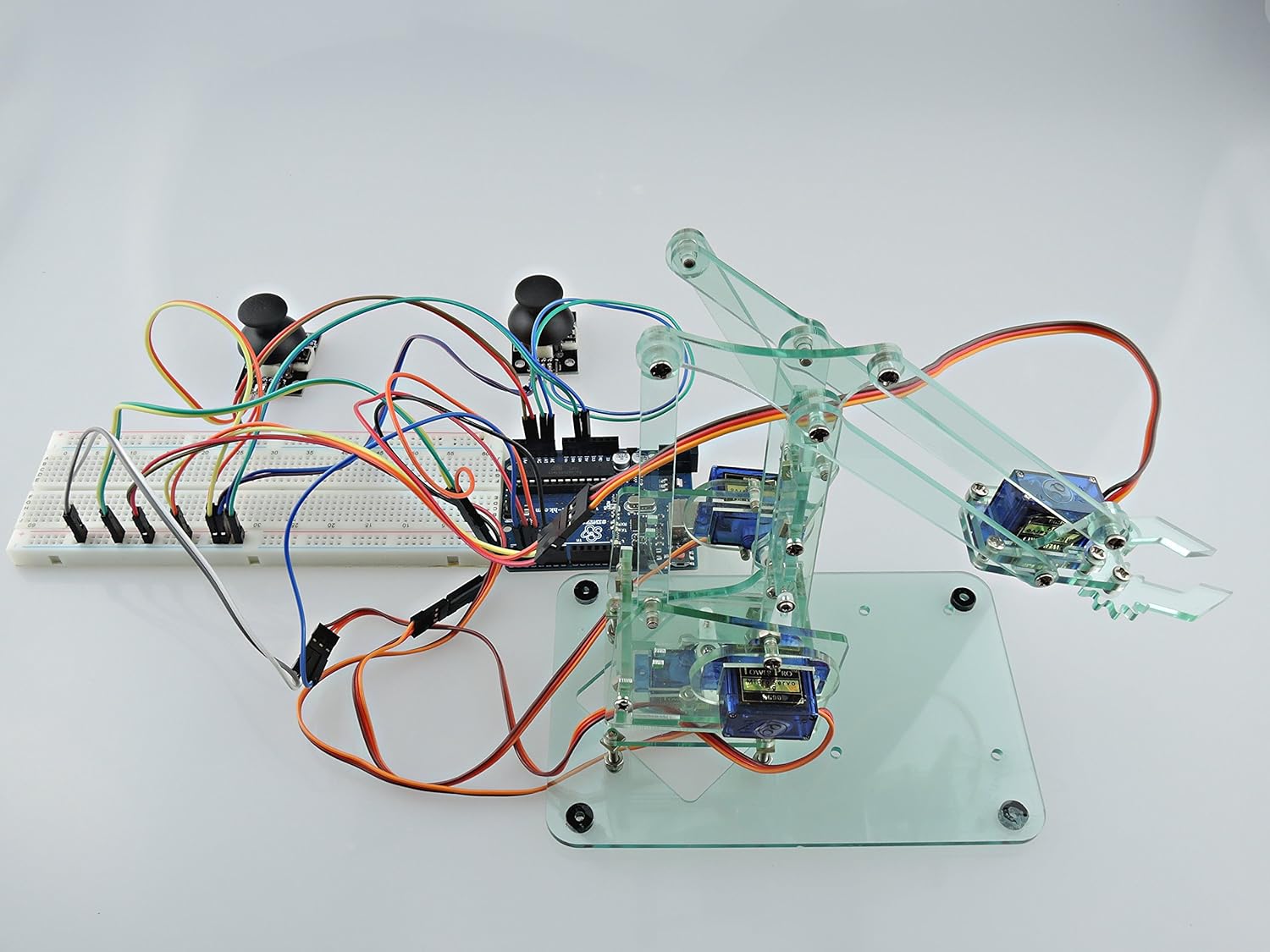 Можно сделать так, что в итоге на 2 двигателя будут идти всего два провода вместо 4х. Это немного упростит монтаж и сэкономит место на платформе.
Можно сделать так, что в итоге на 2 двигателя будут идти всего два провода вместо 4х. Это немного упростит монтаж и сэкономит место на платформе.
Монтируем драйвер двигателей на платформу так, чтобы его радиатор был спереди. ЭТО ВАЖНО! В противном случае, вам придется переписывать программу для микроконтроллера.
Драйвер двигателя для Ардуино роботаЗатем размещаем холдер и плату БМС. Не забываем оставлять место спереди для последующего монтажа каких-либо сенсоров. Ардуиио нужно разместить так, чтобы была в дальнейшем возможность подключить его к ПК для прошивки. Это же правило относится и к модулю для зарядки аккумуляторов.
Питание для ардуино и других электронных компонентов мы возьмем от драйвера двигателей.
Подключаем Bluetooth к машинке
Мы собираемся использовать модуль Bluetooth через SoftwareSerial (библиотеку SoftwareSerial.h), поэтому подключаем модуль блютуз к 3 и 4 цифровым пинам ардуино. RX к D3, TX к D4
Схема подключения Bluetooth к ардуино машинкеПодключаем BluetoothСхема подключения драйвера двигателя к роботуСхема подключения компонентов к Arduino
Датчик расстояния машины
Платформа робота готова! Теперь осталось загрузить прошивку для контроллера Ардуино и программу для смартфона RC CAR. Вы можете посмотреть на нашем сайте обзор Android приложений для работы с Arduino.
Вы можете посмотреть на нашем сайте обзор Android приложений для работы с Arduino.
Программирование робота на Ардуино
Так как мы делаем инструкцию по сборке универсального робота, то неплохо бы предусмотреть все необходимое для разных вариантов ее использования. Весь код вы можете найти в архиве: https://yadi.sk/d/jIYZQDI-GuytMw
Для езды по черной линии мы задействовали 3 пина под датчики линии и три пина для подключения светодиодов, чтобы иметь возможность визуального контроля наличия линии. Другими словами, если под левым сенсором есть черная линия, то загорится левый светодиод и так далее. Кроме того, мы разработали и протестировали схему, в которой будут одновременно использоваться и управление скоростью моторов по ШИМ, и серводвигатель.
Видео инструкция по сборке робота на Ардуино
Предлагаем вашему вниманию подробную видео-инструкцию по сборке робота автомобиля на Ардуино от нашего партнера – канала ArduMast Club.
Надеемся, статья была полезна для вас. В комментариях под видео вы сможете найти код, схемы робота, соединения деталей, скетч и ссылки на интернет-магазины, в которых вы можете купить все необходимые компоненты.
Page not found – Лаборатория проектов школы 169
Unfortunately the page you’re looking doesn’t exist (anymore) or there was an error in the link you followed or typed. This way to the home page.
Blog
- 02/25/2021 – Новое пособие “Дизайн компьютерных игр”
- 01/22/2021 – Snap4Arduino и проекты “виртуальной” робототехники
- 01/21/2021 – Cеминар “Программирование микроконтроллеров в визуальных средах. От учебных проектов к профессиональным”
- 01/18/2021 – Дистанционная внеурочка, материалы занятий по темам Робототехника и Дизайн компьютерных игр
- 12/01/2020 – Лекция-демонстрация “Комплект на базе робота Makeblock mBot в школе и дома”
- 11/24/2020 – Профессиональный и личностный успех в проектах технической направленности как фактор формирования социальных установок обучающихся
- 11/23/2020 – Виртуальная робототехника на Scratch и Snap4arduino
- 11/16/2020 – Цифровая образовательная среда.
 Проблемы, решения и влияние на социальные установки. Начало.
Проблемы, решения и влияние на социальные установки. Начало. - 11/11/2020 – Представляем 5 главу книги “Scratch и Arduino для юных программистов и конструкторов”
- 08/25/2020 – Программа физического моделирования Algodoo, первые шаги
- 08/19/2020 – Средства визуального программирования микроконтроллеров, краткий обзор обновлений
- 08/04/2020 – Готовим дидактические материалы для внеурочки в условиях продолжающейся пандемии
- 06/01/2020 – Шаг за шагом моделируем в Scratch гармонические колебания и упругое взаимодействие объектов
- 04/27/2020 – Шаг за шагом моделируем столкновения объектов в среде Snap4arduino
- 04/18/2020 – Шаг за шагом моделируем поведение робота в среде Snap4arduino
- 04/04/2020 – Создание домашних заданий в TRIK Studio
- 03/27/2020 – Дистанционное обучение робототехнике на платформе TRIK Studio
- 03/05/2020 – Открытая учебная робоплатформа нового поколения
- 02/25/2020 – Преемственность учебных материалов в робототехнике, альтернативы mBot
- 12/12/2019 – Методы распределённой разработки как учебный инструмент в робототехнике
- 12/10/2019 – Приглашаем на городской семинар «Современные микроконтроллеры и ранняя инженерная профориентация в школе»
- 12/02/2019 – Открытые зимние состязания Санкт-Петербурга по робототехнике 2019
- 11/22/2019 – Наш УМК по робототехнике – Победитель конкурса инновационных продуктов!
- 10/22/2019 – Сборка робота на основе конструктива из набора “Ресурсный набор Lego Mindstorms EV3 (45560)”
- 09/20/2019 – Наш УМК выставлен на участие в региональном конкурсе инновационных продуктов
- 09/12/2019 – Семинар “Техносфера современной школы: создание и перспективы использования”
- 09/01/2019 – Перевод регламента соревнований makeX 2019 года
- 05/29/2019 – Апробация плат от Elecfreaks
- 05/26/2019 – 2 место в категории “Следовании по линиии экстремал”
- 05/15/2019 – Образовательный робонабор под нашу книжку.

- 04/24/2019 – ME-Sensors 3D (модели для печати защитных пластин)
- 04/18/2019 – Региональный круглый стол в 169-ой
- 04/07/2019 – Поздравляем победителей открытых состязаний Санкт-Петербурга по робототехнике 6-7 апреля 2019
- 03/31/2019 – Открытые соревнованиях по робототехнике Центрального района
- 03/28/2019 – ИТНШ 2019. «Ноу-хау» на основной площадке конференции.
- 03/27/2019 – ИТНШ 2019. Выездной семинар в 169-ой
- 02/22/2019 – 3D-печать на занятиях. Из опыта работы.
- 02/18/2019 – Fischertechnik. BT Стартовый набор. Пробуем ROBO Pro Light
- 02/11/2019 – Образовательные продукты Makeblock – традиции, инновации и открытые стандарты
- 02/02/2019 – Курсы робототехники в 169-ой
- 01/30/2019 – Первый шаг в мир микроконтроллеров
- 01/27/2019 – Городские соревнования “Юный конструктор”
- 12/25/2018 – Обзор визуальных средств программирования микроконтроллеров (часть 2)
- 12/20/2018 – Городской семинар “Scratch-подобные визуальные среды программирования микроконтроллеров: обзор, сравнение, расширение возможностей, опыт использования”
- 12/19/2018 – Обзор визуальных средств программирования микроконтроллеров (часть 1)
- 12/14/2018 – Игрофикация в робототехнике, плюсы и минусы
- 12/14/2018 – Fischertechnik.
 BT Стартовый набор. Начинаем апробацию.
BT Стартовый набор. Начинаем апробацию. - 12/05/2018 – MakeBlock Ranger. 3D модели для сборки. Вариант 1.
- 11/22/2018 – Наш УМК – лауреат конкурса инновационных продуктов!
- 11/21/2018 – Поздравляем нашего выпускника!
- 10/23/2018 – В 169-ой переведен регламент MakeX Robotics Competition Blue Planet 2018
- 10/18/2018 – Новое поколение микроконтроллеров и программных средств, в чем отличие?
- 10/14/2018 – Зачем и как мы учим программировать микроконтроллеры. Как?
- 10/06/2018 – Робофинист 2018: ведем мастер-классы, представляем новые продукты.
- 10/05/2018 – Ура! В издательстве БХВ вышла наша новая книжка про роботов!
- 09/28/2018 – 3D печать в школе – несколько зарисовок из опыта работы.
- 09/22/2018 – Договор с MakeBlock Co.Ltd и ООО “ЦС Импэкс” о совместных исследованиях!
- 06/08/2018 – Advanced Arduino Extension – расширение для mBlock3 от А.Григорьева
- 04/24/2018 – Встреча: MakeBlock, DIGIS, БХВ и 169-ая))
- 03/28/2018 – ИТНШ 2018. Выездной семинар в 169-ой.
- 03/27/2018 – ПОФ 2018. Ярмарка «Успешных практик реализации ФГОС»
- 03/20/2018 – mBot. Собираем оптимальную конфигурацию учебного робота.
- 03/15/2018 – ПРОБЛЕМЫ ВНЕДРЕНИЯ УЧЕБНЫХ ПРОГРАММ ПО НАПРАВЛЕНИЮ “РОБОТОТЕХНИКА” В ОБЩЕОБРАЗОВАТЕЛЬНОЙ ШКОЛЕ
- 03/08/2018 – 7-8 марта. Выступление на Робофесте 2018 в Москве.
- 03/06/2018 – Новый видеоролик о mBot: “лягушка” и “жук”
- 02/14/2018 – ОПЫТ ПРЕПОДАВАНИЯ РОБОТОТЕХНИКИ В ОБЩЕОБРАЗОВАТЕЛЬНОЙ ШКОЛЕ
- 01/31/2018 – вебинар “Опыт школ по внедрению Инженерного инновационного класса”
- 01/30/2018 – Семинар по программированию микроконтроллеров и технологиям “Интернет-вещей”
- 01/18/2018 – Робототехника и экология. Выступление в Туле.
- 12/09/2017 – “Робоняша” в 169-ой
- 12/08/2017 – Новый ролик в видеоблоге: Робот mBot от компании Makeblock. ч.3-1. Расширение: шестиногий робот.
- 11/30/2017 – Межрайонный мастер-класс
- 11/25/2017 – 169-ой школе исполнилось 80 лет!
- 11/18/2017 – Практиканты “Петровского колледжа” в 169-ой
- 11/15/2017 – Новая книга!
- 11/07/2017 – Проект “Знакомимся, mBot!”
- 10/06/2017 – “Умные вещи”, новый виток развития технологий
- 10/05/2017 – Как связать два микроконтроллера по Bluetooth. Настраиваем HC-05 для работы в режиме Master
- 10/04/2017 – СПО в школе. Давайте вместе заполним список! Часть 1. Поддержка робототехники и конструирования
- 10/03/2017 – Робототехника… без роботов. Scratch и имитационное программирование. Движение по линии
- 10/02/2017 – Стандарты для Arduino-роботов как возможность занять правильную нишу в образовательной робототехнике.
- 10/02/2017 – Использование распределенных ресурсов сетевых партнеров для формирования современной техносферы образовательной организации
- 10/02/2017 – Визуальное программирование микроконтроллеров в образовании
Робот – художник на Arduino Uno
Всем привет =) Сегодня у меня для вас робот – художник. Уже давненько хотел собрать эту штуку и вот, наконец, выдалось свободное время.
Все детали напечатаны PLA пластиком с 30% заполнением. Расход филамента около 200 грамм.
Ссылка на страницу проекта – https://www.thingiverse.com/thing:2349232
Видеогайд по сборке и настройке:
Для сборки потребовалось:
– 2 шаговых двигателя nema17 с шагом 1,8 градуса
– 2 шкива GT2 на 16 зубов
– Около 2-х метров ремня GT2
– Шпилька М8 длиной 480 мм. + 4 гайки и 4 шайбы
– 8 мм. направляющие. Пара длиной 460 мм. и ещё пара – 400 мм. Хотя, если предполагается рисовать на листах формата А4, то можно взять направляющие покороче, как и положено по проекту.
– 3 мм. линейные направляющие длиной 70 мм. – 2 штуки (Можно заменить отрезками гвоздей, спиц или чего то подобного, подходящего по диаметру) + пара пружин из шариковых ручек
– Линейные подшипники LM8UU – 8 штук
– Подшипники с фланцем F623ZZ – 8 штук
– Подшипник 605ZZ – 1 штука
– Сервопривод SG90 – 1 штука
– Arduino Uno + CNC shield + 2 драйвера А4988
– Некоторое количество винтов и гаек М3
– Шариковая ручка (чёрного цвета) – 1 штука
В целом, это не самая удачная конструкция. Направляющие люфтят и раскачиваются, что хорошо видно на видео. Но зато она очень проста и, я уверен, многие владельцы 3D принтеров смогут собрать такую штуку из того, что завалялось в коробках =)
И хотя рисует робот, в целом, не плохо, всё же стоит хотя бы прикрутить его к массивному основанию, вроде листа качественной (ровной) фанеры или ЛДСП. Робот станет работать несколько стабильнее, а перед ним будет отличная ровная поверхность для крепления бумаги, в которую не жалко втыкать кнопки. В таком виде его даже можно попробовать повесить на стену, чтобы он занимал меньше места.
Робот Паук
Данный робот не имеет в базовой комплектации никаких датчиков и сенсоров. Но Вы всегда их можете добавить самостоятельно. Главное – научится программировать Квадропода совершать красивые движения и даже танцевать!
Для сборки робота Вам как всегда потребуются детали корпуса, которые можно напечатать самостоятельно, скачав их бесплатно с нашего сайта. Затем необходимо купить электронику, список которой будет показан далее. Вкратце, это контроллер Arduino, 8 сервоприводов, да и по сути все.
RobotONRobots
Итак, разложим все запчасти перед собой. Сначала нам нужно сделать сустав. Для этого берём крестообразную деталь и сгибаем ее так, как показано на рисунке. Делать это нужно плавно, используя специальную форму, об которую будем проводить обжимку, и ключ. Стоит отметить, что при печати лучше использовать гибкие материалы, например, SBS пластик.
RobotONRobots
Затем устанавливаем в когти сервомоторы. Сначала нужно добавить им ещё один неподвижный вал. Необходимо раскрутить заднюю крышку и надеть пластиковую деталь, как показано на картинке. Лучше сразу проделать данную операцию со всеми моторами. После чего вставьте их в когти.
RobotONRobots
Теперь пора установить электронику. Можно использовать плату, показанную на картинке. На неё установить батарейки. Но можно использовать обычную Arduino Nano со специальным шилдом приспособленным под сервы. В этом случае вам понадобится отдельно подключить батарейный отсек или аккумулятор. Устанавливаем все это на корпус.
RobotONRobots
Теперь ставим сервоприводы на тело робота. Головки валов должны соответствовать рисунку.
RobotONRobots
Устанавливаем сделанные нами суставы на сервоприводы под углом 45 градусов. Закрепляем их в этом положении пропеллерами, идущими в комплекте с двигателями. Напоминаем, что предварительно необходимо настроить все сервоприводы на угол 90 градусов.
RobotONRobots
Аналогичным образом подсоединяем когти и закрепляем их.
RobotONRobots
Распиновка данной платы показана ниже. Если Вы используете Arduino с шилдом для серв, то трудностей с подключением быть не должно. В нашем случае плата сама предусматривает коннекторы для данных моторов – выделено синим.
RobotONRobots
Особенности:
Как и в других моделях роботов пауков, самым важным этапом является предварительная настройка сервомоторов. Для того, чтобы ноги паука могли свободно двигаться в любую сторону, необходимо заранее выставить положение вала серв в среднее положение, а именно на 90 градусов. Можно использовать моторы с металлическим редуктором (версия MG) или с пластиковым (SG). Разница лишь в долговечности, особенно если у Вас есть ребёнок, который любит все покрутить. Что же нам потребуется из электроники?
- 8 cервомоторов SG90 или MG90
- Arduino Nano/Uno или TinyPlan V4 Controller Board
- 6 батареек или аккумулятор на 12 В
Характеристики:
- Простое программирование ввиду наличия одного типа
- Возможность использования различных датчиков и сенсоров
- Отличная игрушка для развлечений и демонстраций
- Интересная инженерная работа
- Необходимость использования 3D принтера
Видео:
Как сделать машинку на радиоуправлении Ардуино через bluetooth своими руками
Это первый роботизированный проект, который я когда-либо делал, и если вы никогда не пробовали собрать робота, то, скорее всего, думаете что это сложно. Но Ардуино и шасси 2WD / 4WD сделают вашу сборку намного проще, и вы соберете своего первого робота с радиоуправлением на Ардуино без каких-либо мучений.
По пути ко мне пришла идея о создании радиоуправляемой машины своими руками, которая бы объезжала препятствия, поэтому я собрал и этот проект, видео и файл программы к которому прикладываю ниже.
ФайлыШаг 1: Нужные части и инструмент
Я воспользовался готовыми решениями, и все запчасти и инструменты были приобретены через интернет.
Запчасти:
- Набор шасси 4WD для робота (GearBest)
- Arduino Nano (GearBest)
- Модуль H-моста LM298 (GearBest)
- Модуль bluetooth HC-06 (Amazon)
- Литий-ионные батарейки 2 x 18650 (GearBest)
- Отсек для батареек 2x 18650 (GearBest)
- Небольшая макетная плата (GearBest)
- Провода сечением 0.5 мм2
- Провода с джамперами папа-мама (Amazon)
- Провода с джамперами мама-мама (Amazon)
- Малярная лента, изолента или что-то подобное (Amazon)
Для робота, объезжающего препятствия:
Ультразвуковой модуль измерения расстояния HC — SR04 (GearBest)
Необходимый инструмент :
- Паяльник (Amazon)
- Кусачки (Amazon)
- Стриппер для провод (GearBest)
- Клеевой пистолет (GearBest)
Шаг 2: Что такое робот?
Робот – это электромеханическое устройство, которое способно каким-либо образом реагировать на окружающую обстановку и принимать самостоятельные решения или действия, чтобы достичь определенных целей.
Робот состоит из следующих компонентов:
- Структура / Шасси
- Привод / Мотор
- Контроллер
- Вводные устройства / Датчики
- Источник питания
В следующих шагах я опишу каждый из этих компонентов, и вы всё легко поймёте.
Шаг 3: Структура / Шасси
Структура состоит из физических компонентов. Робот имеет один или несколько физических компонентов, которые каким-либо образом двигаются для выполнения задания. В нашем случае структура робота – это шасси и колёса.
Шаг 4: Приводы
Под приводом можно понимать устройство, которое преобразовывает энергию (в робототехнике под энергией понимается электрическая энергия) в физическое движение. Большинство приводов производят вращательное или линейное движение.
В нашем случае привод – это DC-мотор, скорость которого равна 3000 оборотам в минуту, а вращающий момент 0.002 Н•м. Теперь добавим к нему шестерню с передаточным числом 1:48. Новая скорость уменьшается на коэффициент 48 (в результате давая 3000/44 = 68 оборотов в минуту) и вращающий момент увеличивается на коэффициент 48 (в результате давая 0.002 x 48 = 0.096 Н•м).
Шаг 5: Подготавливаем клеммы моторчиков
Отрежьте по 4 провода красного и черного цвета длиной примерно 12-15 см. Я использовал провода сечением 0.5 мм2. Оголите концы проводов. Припаяйте провода к клеммам моторчиков.
Вы можете проверить полярность моторчиков, соединив их с отсеком для батареек. Если он движется в прямом направлении (с красным проводом на позитивной и черным на негативной клеммах батареек), то с соединением все в порядке.
Шаг 6: Устанавливаем мотор
Прикрепите две акриловые распорки к каждому мотору при помощи двух длинных болтов и двух гаек. Для наглядности вы можете посмотреть видео.
Возьмите на заметку, что провода на каждом моторе ведут к центру шасси. Соедините оба красных и оба черных провода от моторов с каждой стороны шасси. После соединения у вас будет две клеммы на левой стороне и две на правой.
Шаг 7: Устанавливаем крышу
Послу установки 4 моторов нужно установить крышу. Приладьте 6 медных стоек при помощи гаек, клеммы проводов выведите сквозь отверстие в крыше.
Шаг 8: Контроллер
Теперь у нас установлены шасси и приводы, но нам не хватает контроллера. Шасси без контроллера никуда не поедут. Робот будет оставаться на месте, оставаясь безжизненным. Поэтому, для того чтобы робот перемещался, нам нужен мозг (контроллер).
Контроллер – программируемое устройство, способное работать по заданной программе и отвечающее за все вычисления, принятие решений и коммуникацию. В нашем случае в качестве контроллера мы используем микроконтроллер Ардуино Нано.
Контроллер принимает входные данные (с датчиков, удалённо и т.д.), обрабатывает их и затем даёт команду приводам (моторам) выполнить выбранное задание.
Если вы подключите позитивный провод от батарей на одну строну моторчика, затем подключите негативный провод от батарей на другой контакт моторчика, то он начнёт крутиться вперёд. Если вы поменяете провода местами, то мотор начнёт вращаться в другую сторону.
Микроконтроллер можно использовать, чтобы вращать мотор в одном направлении, но если вам хочется с помощью микроконтроллера вращать мотор и вперёд, и назад, то вам нужна дополнительная схема – H-мост. В следующем шаге я объясню, что это такое.
Шаг 9: Н-мост (модуль LM 298)
Что такое Н-мост?
Термин Н-мост произошел от типичного графического представления этой схемы. Это схема, которая может вращать мотор как в прямом, так и в обратном направлении.
Принцип работы:
Посмотрите приложенную картинку для понимания принципа работы схемы Н-моста. Мост состоит из 4 электронных выключателей S1, S2, S3, S4 (транзисторы / MOSFET/ IGBTS).
Когда выключатели S1 и S4 закрыты, а остальные два открыты, положительное напряжение будет проходить через мотор, и он будет вращаться в прямом направлении. Таким же образом, когда закрыты выключатели S2 и S3, а S1 и S4 открыты, обратное напряжение будет даваться на мотор и он начнёт вращаться в обратном направлении.
Заметка: выключатели на одной руке (то есть S1, S2 или S3, S4) никогда не закрываются одновременно – это создаст короткое замыкание.
Н-мосты доступны в виде интегральных схем, либо можно собрать свой мост при помощи 4 транзисторов или MOSFET. В моём случае используется интегральная схема Н-моста LM298, которая позволяет управлять скоростью и направлением моторов.
Описание распиновки:
Out 1: DC мотор 1 «+» или шаговый двигатель A+
Out 2: DC мотор 1 «-» или шаговый двигатель A-
Out 3: DC мотор 2 «+» или шаговый двигатель B+
Out 4: вывод мотора B
12v: вход 12V, но можно использовать от 7 до 35V
GND: Земля
5v: выход 5V, если джампер 12V стоит на месте, идеально для питания Arduino (и т.п.)
EnA: позволяет получать сигналы PWM для мотора A (Пожалуйста, прочитайте секцию «Arduino Sketch Considerations»)
IN1: включает мотор A
IN2: включает мотор A
IN3: включает мотор B
IN4: включает мотор B
BEnB: позволяет получать сигналы PWM для мотора B (Пожалуйста, прочитайте секцию «Arduino Sketch Considerations»)
Шаг 10: Входы / Датчики
В отличие от людей, роботы не ограничены лишь зрением, звуком, осязанием, обонянием и вкусом. Роботы используют различные датчики для взаимодействия с внешним миром.
Датчик – это устройство, которое выявляет и отвечает на определенные типы входящей информации из окружающего мира. Этой информацией может быть свет, тепло, движение, влажность, давление или любое другое явление окружающей среды.
Входящие сигналы могут идти от датчиков, удалённо, или со смартфона. В этом руководстве я использую смартфон в качестве девайса, отправляющего сигналы, управляющие роботом.
Шаг 11: Источник питания
Чтобы управлять приводами (моторами) и питать контроллер, роботу нужен источник питания. Большинство роботов питается от батарей. Когда мы говорим о батареях, то имеем в виду множество вариантов:
- Алкалиновые батарейки AA (не заряжаются)
- Никель-металгидридные или никель-кадмиевые батарейки AA (заряжаются)
- Литий-ионные батареи
- Литий-полимерные батареи
В зависимости от ваших нужд, нужно выбрать подходящий вид батарей. По-моему мнению, нужно всегда выбирать заряжаемые батареи достаточной ёмкости. Я использовал 2 литий-ионные батареи стандарта 18650 ёмкостью 2600mAh. Если для автономности вам нужно больше мощности, используйте большой комплект батарей, например 5A turnigy.
Отсек для батарей:
Отсек для батарей я заказал в Китае, он не подходил для батарей с плоским верхом, поэтому я использовал два неодимовых магнита для придания батарейкам нужной формы.
Зарядка:
Для зарядки батарей нужен хороший зарядник. По моему опыту, эти зарядники хорошо зарекомендовали себя:
- PowerEx AA Charger-Analyzer (Amazon)
- XTAR LiIon Battery Charger (Amazon)
- Turnigy LiPo Battery Charger (Amazon)
Шаг 12: Установка компонентов
Цельная схема устанавливается на крыше. Отсек для батарей, драйвер двигателей LM 298 и маленькую макетную плату я закрепил горячим клеем, но можно просто прикрутить их. Модуль bluetooth закрепляется скотчем. Ардуино нано вставьте в макетную плату.
Шаг 13: Электропроводка
Для соединения модулей понадобятся провода с джамперами.
Соедините красные провода двух моторов вместе (на каждой стороне) и затем черные провода. В итоге у вас выйдет по две клеммы с каждой стороны.
MOTORA отвечает за два правых мотора, соответственно два левых мотора соединены с MOTORB.
Для соединения всех компонентов следуйте инструкции:
Соединение моторов:
Out1 -> красный провод левостороннего мотора (+ )
Out2 -> черный провод левостороннего мотора ( — )
Out3 -> красный провод правостороннего мотора ( + )
Out4 -> черный провод правостороннего мотора ( — )
LM298 — > Arduino
IN1 -> D5
IN2-> D6
IN2 ->D9
IN2-> D10
Модуль Bluetooth -> Arduino
Rx-> Tx
Tx ->Rx
GND -> GND
Vcc -> 3.3V
Питание
12V — > красный провод батарей
GND -> черный провод батарей и пин GND на Arduino
5V -> соедините с пином 5V Arduino
Шаг 14: Логика управления
Чтобы понять принцип работы, я создал эту логическую таблицу. Она очень пригождается во время написания кода.
Шаг 15: Софт
Часть с фотом очень проста, она не требует никаких библиотек. Если вы поняли таблицу логики из прошлого шага, то сможете написать свой код. Я не тратил на код много времени и просто скопировал чей-то готовый вариант. Чтобы управлять роботом-машиной, я использую смартфон, соединённый с контроллером через модуль Bluetooth (HC-06).
Скачайте приложение. После его установки, свяжите телефон с модулем Bluetooth. Пароль «1234». Код Ардуино прикреплён ниже.
ФайлыШаг 16: Тестирование
Чтобы проверить робота-машину, я положил её на маленькую картонную коробку. Таким образом, колёса будут крутиться, но машинка будет оставаться на месте. Проверьте работоспособность, нажимая все доступные кнопки. Если всё работает, то можно по-настоящему управлять ей.
Заметка: если моторы вращаются в противоположном направлении, то просто поменяйте местами провода.
Шаг 17: Планы на будущее
В этом руководстве я объяснил, как создать простенькую машинку. Дальше я хочу добавить в неё некоторые улучшения. Вы можете присоединить к ней различные датчики, вот некоторые идеи:
- Добавление ультразвукового датчика для объезда препятствий
- Использование модуля WiFi, например ESP8266 или Node MCU вместо Bluetooth, для удлинения дистанции управления.
- Добавление солнечной панели для зарядки батарей.
Автономный робот на основе Arduino с возможностью дистанционного управления
Чтобы наработать опыт в работе с платой Arduino, так сказать в качестве учебного опыта и просто для интереса был создан этот проект. Целью проекта было создать автомобиль, который может автономно перемещаться, объезжая различные препятствия и не сталкиваясь с ними.
Шаг 1: Список компонентов и стоимость проекта
1. Игрушечная Машинка с радиоуправлением (radio controlled).
Стоит эта штука около 20 баксов, если у вас есть возможность потратить больше, то можете использовать и получше.
2. Arduino Uno микроконтроллер — 25 долларов
3. Motor shield для контроля электромоторов — 20 долларов
4. GPS для навигации. Adafruit Ultimate GPS Shield — 50 долларов
5. Магнитометр в качестве компаса для навигации. Adafruit HMC5883 Magnetometer — 10 долларов
6. Ультразвуковой датчик расстояния, чтобы избегать препятствия. HC-SR04 — 6 долларов
7. ЖК-дисплей для отображения состояния транспортного средства и информации. LCD Display Blue 1602 IIC, I2C TWI — 6 долларов (можете использовать другой)
8. Инфракрасный датчик и пульт.
9. Arduino sketch (программа C++).
10. Тонкая древесная плита в качестве монтажной платформы.
11. Макетные платы. Одна длинная и узкая, а другая маленькая, чтобы отдельно установить на ней магнитометр подальше от других элементов.
12. Перемычки.
13. Набор для монтажа ультразвукового датчика — 12 долларов
14. Паяльник и припой.
15. Дрель.
Итак, в общем на всё ушло около 150 долларов, это при условии, если закупать все эти компоненты, поскольку возможно у вас уже что то имеется из этого.
Шаг 2: Шасси и монтаж платформы
Радиоуправление изъяли из ненужной игрушки, которая стоила 15 баксов.
Машинка здесь с двумя двигателями. С помощью одного движка пультом контролируется скорость движения робота, а с помощью другого контролируется рулевое управления.
Использовалась тонкая доска в качестве монтажной поверхности, на которой были прикреплены макетные платы, Arduino, ЖК и т.д. Батарейки размещены под доской и провода пропущены через просверленные отверстия.
Шаг 3: Программа
Arduino управляется через программу С ++.
Исходный код
RC_Car_Test_2014_07_20_001.ino
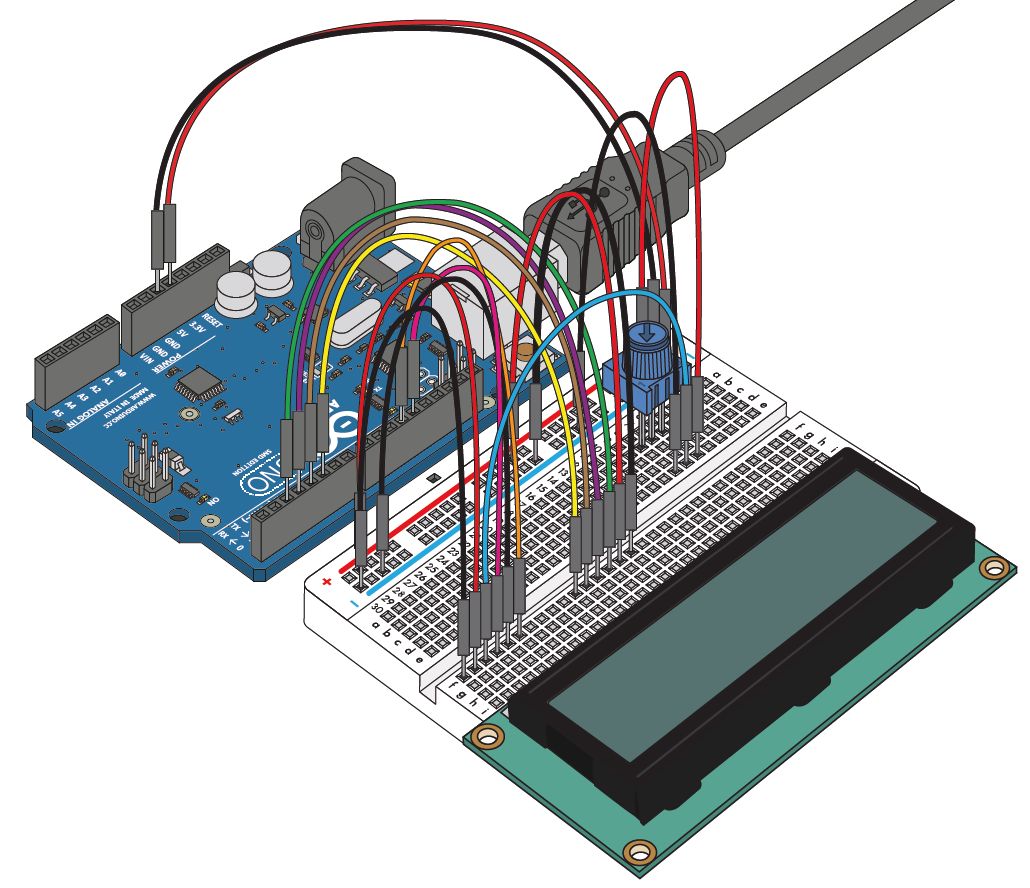
Шаг 4: ЖК-дисплей
Во время работы экран отображает следующую информацию:
Ряд 1:
1. TH — Задача, курс к текущей маршрутной точки
2. CH — Текущее направление робота
Ряд 2:
3. Err — Направление по компасу, показывает в каком направлении движется робот (влево или вправо)
4. Dist — Фокусное расстояние (в метрах) до текущей маршрутной точки
Ряд 3:
5. SNR — Sonar расстояние, то есть расстояние до любых объектов в передней части робота
6. Spd — Скорость робота
Ряд 4:
7. Mem — Память (в байтах). В памяти Arduino имеется 2 КБ
8. WPT n OF x — Показывает, где робот находится в списке маршрутных точек
Шаг 5: Избежать столкновения с объектами
Чтобы робот избегал препятствий, здесь использовался ультразвуковой датчик » Ping». Было решено совместить его с библиотекой Arduino NewPing, поскольку она лучше, чем простая PIng библиотека.
Библиотека была взята отсюда: https://github.com/fmbfla/Arduino/tree/master/NewPing
Датчик был установлен на бампере робота.
Если объект обнаружен:
- Робот замедляется
- Если робот движется прямо (то есть не сворачивает), то помогите роботу, поверните его по направлению к вашей точке маршрута (бывают сбои иногда).
- Если робот столкнулся с объектом, то сдайте назад, чтобы потом робот снова продолжил движение.
- Если робот сбился с маршрутной точки, то не страшно, точки сохраняются и можно снова повторить процесс.
Шаг 6: Управление маршрутными точками
Для навигации курса, нам нужно управление различными точками. Был создан простой WaypointClass, который содержит значения долготы и широты. Затем создали WaypointClass для хранения маршрутных точек, и переменную currentWaypoint, чтобы отслеживать текущие маршрутные точки.
waypointClass.h
Шаг 7: GPS-навигация
GPS используется для обнаружения расположения робота. При помощи навигации можно рассчитать курс и расстояние маршрутной точки.
Для GPS использовалась Adafruit Ultimate GPS Shield.
Использовалась библиотека: https://github.com/adafruit/Adafruit-GPS-Library
Образец кода: https://github.com/adafruit/Adafruit-GPS-Library/tree/master/examples/parsing
Для расчёта расстояния до точки: https://github.com/mikalhart/TinyGPS
Шаг 8: Компас навигации
GPS работает отлично и подходит для предоставления точных данных о местоположении, но масштаб, на котором работает этот проект слишком мал для того, чтобы обеспечить точную информацию.
Использовался цифровой магнитометр (который предоставлен коде как «компас»). «Компас» выполняет быстрое считывание с текущего направления транспорта. С помощью GPS вычисляется курс и куда поворачивать (влево или вправо).
Можете использовать машинку с более широким размахом рулевого управления (то есть более маневренную). Здесь использовалась дешёвая игрушка и поэтому робот ограничен в управлении.
Магнитометр был установлен подальше от моторов и прочих элементов, поскольку он очень чувствителен к электрическим помехам.
Шаг 9: Мотор и управление скоростью
Скорость автомобиля контролируется с помощью пульсовой волны модуляции (ШИМ), предоставленной Adafruit Motor Shield.
Программа устанавливает частоту в зависимости от следующего:
- Если робот едет прямо (не поворачивая) и объекты не обнаружены, движение быстрое.
- Если робот едет прямо и обнаруживает объект, движение замедляется.
В приведенном выше фото, вы можете увидеть: (1) на задних колёсах приводной двигатель и (2) на передних колёсах рулевой двигатель.
Шаг 10: Инфракрасный датчик и пульт управления
Был добавлен инфракрасный датчик (с соответствующим дистанционным пультом), чтобы обеспечить удобную функциональность.
Как только будет подключено питание, робот сразу же начнёт движение и пульт позволяет сразу взять под контроль робота, чтобы он начал выполнять ваши команды.
Шаг 11: Возможные улучшения проекта
Cписок потенциальных усовершенствований
- Лучше использовать игрушку джип, поскольку у него больше колёса по размеру и более мощные моторы, он гораздо легче едет по траве и грязи.
- Можно добавить сервопривод.
- Добавить более лучший переключатель.
- Добавить камеру для фотоснимков или видео.
- Добавить радиопередатчик.
Шаг 12: Заключительное слово
Получилась очень интересная штука. Надеемся данный проект поможет вам познать больше о робототехнике. Удачи вам в ваших проектах.
До свидания.
Arduino – Робот
Начало работы с роботом Arduino
Это устаревший продукт.
С помощью робота Arduino вы можете узнать об электронике, механике и программном обеспечении. Это крошечный компьютер на колесах. Он поставляется с рядом примеров проектов, которые вы можете легко воспроизвести, и это мощная робототехническая платформа, которую можно взломать для выполнения всевозможных задач.
Робот имеет большое количество входов; два потенциометра, пять кнопок, цифровой компас, пять датчиков пола и устройство для чтения SD-карт.Он также имеет динамик, два двигателя и цветной экран в качестве выходов. Вы можете управлять всеми этими датчиками и исполнительными механизмами через библиотеку роботов.
На роботе есть две разные платы: плата управления (вверху) и плата двигателя (внизу). Если вы только начинаете заниматься электроникой и программированием, вам следует работать с платой управления. По мере того, как вы набираетесь опыта, вы можете повозиться с Motor Board.
Плата управления роботом
Плата двигателя робота
Настройка робота
Когда вы впервые открываете робота, вам нужно настроить пару вещей, прежде чем он будет готов к работе.
Сначала вам нужно вставить SD-карту в слот на задней стороне TFT-экрана, а затем вставить экран в разъем на плате управления робота. Экран должен быть ориентирован так, чтобы синий текст с надписью «SD Card» находился рядом с кнопками и динамиком.
Как только это будет на месте, вам нужно будет прикрепить защитную крышку к нижней плате. Это поможет предотвратить повреждение моторной платы любыми объектами на земле. Прикрепите защитное покрытие к нижней части робота, как показано ниже.
Контент на SD-карте
SD-карта используется для хранения информации, которую может прочитать робот. Он поставляется с предварительно загруженными изображениями и звуковыми файлами, используемыми в примерах Explore . Освоившись с функциями робота, вы сможете добавлять свои собственные файлы. Если вы когда-нибудь случайно удалите файлы, используемые в эскизах исследования, вы можете скопировать их из каталога SDcontent в библиотеке роботов. Или вы можете скачать файлы здесь.
Подключение робота к компьютеру
На каждой плате робота есть микроконтроллер, который программируется независимо от других.Рекомендуется программировать плату управления (верхнюю плату) только до тех пор, пока вы не ознакомитесь с функциями робота. Плата мотора (нижняя плата) имеет стандартную прошивку, которая подходит для большинства приложений общего назначения.
Подключите плату управления к компьютеру с помощью кабеля USB.
После подключения платы загорится зеленый светодиод, помеченный как PWR на плате управления. LED1 под ним несколько раз мигнет. На плате двигателя также должны гореть красные светодиоды, обозначенные как от LED1 до LED5 (сторона, противоположная переключателю питания).
Если светодиоды на любой плате не загораются, проверьте, подключен ли плоский 10-контактный кабель связи рядом с выключателем питания к обеим платам.
Установка драйверов
OSX
- При первом подключении робота к компьютеру под управлением OSX запускается «Помощник по настройке клавиатуры». С роботом нечего настраивать, поэтому вы можете закрыть этот диалог, нажав красную кнопку в верхнем левом углу окна.
Окна
Следующие инструкции предназначены для Windows 7.Они действительны также для Windows XP с небольшими отличиями в диалоговых окнах.
- Подключите плату и дождитесь, пока Windows начнет процесс установки драйвера. Если установщик не запускается автоматически, перейдите в Диспетчер устройств Windows (Пуск> Панель управления> Оборудование) и найдите список роботов Arduino. Щелкните правой кнопкой мыши и выберите Обновить драйвер .
- На следующем экране выберите «Искать на моем компьютере драйверы» и нажмите Далее .
- Нажмите кнопку Обзор … . Появится еще одно диалоговое окно: перейдите в папку с только что загруженным программным обеспечением Arduino. Выберите папку drivers и щелкните OK , затем щелкните Next .
- Вы получите уведомление о том, что плата не прошла тестирование логотипа Windows. Нажмите кнопку Все равно продолжить .
- Через несколько секунд появится окно с сообщением, что мастер завершил установку программного обеспечения для Arduino Robot.Нажмите кнопку Close .
Linux
Нет необходимости устанавливать драйверы для Linux. (Проверено с Ubuntu 12.04)
Привет, пользователь!
Робот Arduino поставляется с предварительно загруженным приложением, которое запрашивает ваше имя, как вы хотите назвать робота и где вы находитесь. Посмотрите на экран робота, чтобы узнать, как вводить информацию с помощью кнопок и потенциометра.
Робот можно питать от 4 батареек AAA или подключить кабель USB к двигателю или плате управления.
После завершения процесса настройки робота вы можете начать писать свои собственные программы для управления им.
Загрузка тестового скетча
Чтобы запрограммировать робота, подключите плату управления к компьютеру через USB. Откройте IDE Arduino и загрузите скетч, расположенный в Файл> Примеры> Robot_Control> Learn> MotorTest.
Вам нужно указать IDE, на какую плату Arduino вы нацеливаетесь с помощью своего программного обеспечения, поэтому откройте меню Tools> Board и выберите Arduino Robot Control .
IDE Arduino должна знать, к какому из ваших USB-портов подключен робот. В меню «Инструменты »> «Последовательный » перечислены доступные порты.
- Если отображается только один элемент, щелкните по нему.
- Если отображаются два или более, вы можете отключить плату управления и снова открыть меню; исчезнувшая запись должна быть роботом. Снова подключите плату и выберите этот последовательный порт.
Нажмите кнопку «Загрузить» в верхнем левом углу окна IDE.Подождите несколько секунд – на плате должны мигать светодиоды RX и TX. Если загрузка прошла успешно, появится сообщение «Готово». появится в строке состояния программы. Как только это появится, вы можете отключить робота от USB-кабеля.
С батареями в роботе, включите выключатель питания и положите его на землю. Робот должен показать вам несколько основных движений. Поздравляю! Вы запустили робота и запустили его.
Если робот не движется, выключите питание.Подключите плату двигателя к компьютеру с помощью кабеля USB. Загрузите скетч File> Examples> Robot_Motor> Robot_Motor_Core в IDE и выберите Arduino Robot Motor в меню Boards . Загрузите этот скетч, отключитесь от компьютера и попробуйте снова его включить.
Примечание. Если после подключения робота последовательный порт не отображается и перезапуск IDE / отключение-повторное подключение робота не помогает, выполните следующие действия:
- Откройте очень простой скетч, например Blink или BareMinimum
- Нажмите кнопку загрузки
- Когда в строке состояния отображается «Загрузка… “, дважды нажмите кнопку сброса на плате управления.
- Последовательный порт должен отображаться как обычно.
Перемещение робота
Этот эскиз многократно перемещает робота вперед и назад.
Каждый раз, когда вы пишете код для робота, обязательно включайте
Нет необходимости инициализировать объект Robot.
Чтобы заставить колеса двигаться, вызовите робота.motorsWrite (). motorsWrite () требует 2 аргумента: скорость левого мотора и скорость правого мотора. Эти значения находятся в диапазоне от -255 до 255, где -255 – полный задний ход, а 255 – полная скорость вперед. Если вы передадите значение 0, мотор перестанет вращать колесо.
После загрузки эскиза отсоедините USB-кабель от робота. Когда USB подключен, двигатели робота отключаются. Включите питание и смотрите, как он двигается!
# включить void setup () {
Robot.begin (); // инициализировать библиотеку
}
void loop () {
// двигаться вперед на одну секунду
Robot.motorsWrite (255,255);
задержка (1000);
Robot.motorsWrite (0,0); // остановка движения
delay (1000);
// двигаться назад на одну секунду
Robot.motorsWrite (-255, -255);
задержка (1000);
Robot.motorsWrite (0,0); // остановка движения
delay (1000);
}
Прочтите кнопки
Вы напишете эскиз, который будет печатать нажатия кнопок на экране.
Во-первых, вам нужно включить библиотеку роботов.
# включить
В setup () запустите робота и экран.
void setup () {
Robot.begin ();
Robot.beginTFT ();
}
В цикле loop () каждые 100 мс считывайте состояние кнопок. Если кто-то нажимается, напишите имя на экране.
void loop () {
Robot.debugPrint (Robot.keyboardRead (), 10, 10);
задержка (100);
}
В папке explore примеров роботов есть эскиз под названием Logo , который объединяет этот пример с движением робота сверху.
Измените скорость двигателя с помощью потенциометра
Это позволяет вам контролировать скорость, с которой робот движется по прямой линии. Поворачивая ручку и отображая значения от -255 до 255, вы устанавливаете скорость и направление (вперед или назад) робота.
Во-первых, вам нужно включить библиотеку роботов.
# включить
В setup () необходимо вызвать Robot.begin () для инициализации функций робота.Также вызовите Robot.beginTFT () , чтобы инициализировать экран.
Robot.begin ();
Robot.beginTFT ();
}
В цикле () считайте значение потенциометра с помощью Robot.knobRead () . Сопоставьте его значение (число от 0 до 1023) от -255 до 255. Выведите это значение на экран и используйте его для изменения скорости двигателей.
void loop () {
int val = map (Robot.knobRead (), 0,1023, -255,255);
Робот.debugPrint (val);
Robot.motorsWrite (val, val);
задержка (10);
}
Двигатель робота отключается при подключении через USB. После программирования робота отключите USB-кабель и вставьте батарейки. Включите выключатель питания и наблюдайте за движением робота. Поймайте робота и поверните ручку, чтобы изменить его скорость.
Шуметь
Робот может издавать звуки двумя разными способами. Есть простой звуковой сигнал, но робот также может создавать более сложные звуки, считывая последовательность музыки с SD-карты.В этом примере вы начнете с звукового сигнала. Чтобы узнать о более сложном воспроизведении, см. Пример Melody в папке learn .
Во-первых, вам нужно включить библиотеку роботов.
# включить
В setup () необходимо вызвать Robot.begin () для инициализации функций робота. Также вызовите Robot.beginSpeaker () , чтобы инициализировать динамик.
void setup () {
Робот.начинать();
Robot.beginSpeaker ();
}
В цикле () вы можете вызвать Robot.beep () , чтобы создать звуковой сигнал. Есть три различных типа звуковых сигналов; простой сигнал, двойной сигнал и длинный сигнал.
void loop () {
Robot.beep (BEEP_SIMPLE);
задержка (1000);
Robot.beep (BEEP_DOUBLE);
задержка (1000);
Robot.beep (BEEP_LONG);
задержка (1000);
}
Следующие шаги
С роботом можно делать много вещей.Несколько примеров на этой странице не передают это должным образом. Чтобы увидеть несколько более сложных примеров того, что может делать робот, посмотрите эскизы, найденные в папке Explore примеров роботов. Это более полные примеры, которые показывают вам несколько различных приложений для робота.
Вам необходимо откалибровать модуль компаса робота, чтобы он вращался плавно. Если вы используете старую модель с Honeywell HMC 6352, вы можете обратиться к этому руководству: Калибровка компаса
Чтобы узнать больше о функциях конкретных входов и выходов робота, просмотрите папку learn в примерах роботов.
Обязательно посетите страницу библиотеки робота и страницу оборудования, чтобы получить дополнительную информацию о технических аспектах робота.
Текст руководства по началу работы с Arduino находится под лицензией Лицензия Creative Commons Attribution-ShareAlike 3.0. Примеры кода в руководстве опубликованы в открытом доступе.
Как сделать робота для рисования / рисования на базе Arduino
Введение
Это роботизированная рука с тремя степенями свободы и держателем ручки в качестве конечного эффектора.Вы можете запрограммировать этого робота на рисование чего угодно, написать свое имя, набросать свое лицо и многое другое.
Необходимые компоненты
Руководство по сборке
Шаг 1: Сборка робота
- Установите рупор сервопривода на верхний внутренний диск подшипника с помощью самонарезающих винтов M2 («M2» – диаметр 2 мм) 8 мм. длина. Эти винты можно найти в аксессуарах для сервоприводов. Будьте осторожны с отверстиями, в которые вы устанавливаете рог (используйте отверстия ближе к центру диска).
- Поместите стойки 30 мм на основание. Затяните болтами M3 длиной 8 мм.
- Возьмите нижний наружный диск подшипника и наденьте его на стойки.
- Установите нижний диск внутреннего подшипника на стойки. Выровняйте диск так, чтобы отверстия меньшего размера совпадали с стойками.
- Поместите подшипник сверху на нижний внутренний диск подшипника .Посмотрите, как диск поддерживает подшипник снизу.
- Затем поместите два средних диска внутреннего подшипника . Они идеально впишутся в подшипник.
- Установите узел «рог сервопривода и верхний внутренний диск подшипника» сверху подшипника, как показано. Убедитесь, что все меньшие отверстия в этих дисках выровнены, так как мы скрепим их все вместе с помощью 20-миллиметровых болтов M3.
Примечание 1: Помните, что раньше необходимо было сдвинуть нижний наружный диск подшипника вниз.Вы не сможете сделать это сейчас из-за разницы в диаметре.
Примечание 2: Обратите внимание на то, как подшипник был зажат между верхним и нижним внутренними дисками подшипника.
- Поместите сначала диски среднего внешнего подшипника , а затем верхний диск внешнего подшипника , как показано. Средние диски будут иметь больший внутренний диаметр по сравнению с верхним и нижним. Внутренний диаметр средних дисков будет равен внешнему диаметру подшипника.
- Сдвиньте вверх нижний наружный диск подшипника , совместите отверстия в дисках и сложите их стопкой.
Опять же, посмотрите, как подшипник зажат, потому что верхний и нижний диски подшипника имеют меньший внутренний диаметр по сравнению с внешним диаметром подшипника.
- Поместите 20-миллиметровые стойки сверху и затяните болты M3 длиной 20 мм снизу. Ваша база готова.
Базовая сборка после завершения должна выглядеть следующим образом.
- Поместите серводвигатель в паз на звене в форме ракетки 1 . Будьте осторожны при установке и ориентации сервопривода . Внимательно посмотрите на иллюстрации.
- Прикрепите сервопривод к звену с помощью болтов M4 длиной 16 мм и гаек.
- На рисунках вы видите головку сервопривода , направленную вверх.Не позволяйте этому сбивать вас с толку; головка фактически входит в прорезь в рожке . Мы вернемся к этому снова, а пока прикрепим болты M3 длиной 8 мм и стойки 20 мм к звену, как показано на рисунках ниже.
Это ориентация, в которой мы разместим завершенную ссылку на нашей базе. Обратите внимание на свободные отверстия, через которые мы будем вбивать шурупы, чтобы прикрепить его к основанию.
- Поместите этот узел на основание, как показано, и закрепите болтами M3 длиной 8 мм.
Имейте в виду, что вы установили сервопривод на 90 градусов перед сборкой (подключите сервопривод к evive , перейдите в Control> Servo и установите сервопривод на 90 градусов ).
- Посмотрите, как головка сервопривода входит в рупор сервопривода . Мы должны обеспечить надлежащую блокировку между сервоголовкой и сервоприводом . Для этого вбейте болт в центр рупора (его можно найти в принадлежностях сервопривода) через нижнюю часть основания (через большое отверстие) и закрепите его.
Важно убедиться, что ваш серводвигатель не перемещается вертикально, а во время работы демонстрирует только вращательное движение.
- Вставьте сервопривод во второй слот в этой ссылке.
- Прикрепите сервопривод к звену с помощью болтов M4 длиной 16 мм и гаек M4.
- Поместите звено в форме ракетки 2 так, как показано на следующих рисунках.
Обратите внимание на большие отверстия в звене 2 в форме ракетки. Они предназначены для облегчения разборки и повторной сборки. Вы можете легко продеть отвертку через отверстия, если хотите затянуть или ослабить винты прямо под отверстиями.
- При необходимости вставьте болты M3 длиной 8 мм.
- Теперь соберите второе звено. Присоедините еще один рог сервопривода к звену 2 и закрепите самонарезающими винтами M2.Эта ссылка отличается от поддерживающей связи , поскольку она имеет слот для другого сервопривода . Обратитесь к рисункам.
- Прикрепите стойки 20 мм в показанных местах, затем закрепите эти стойки болтами M3 длиной 8 мм.
- Вставьте держатель сервопривода в прямоугольные пазы на звене link 2 снизу. Обратитесь к рисункам и посмотрите, в какие прямоугольные прорези следует закрепить держатель.
- Вставьте гайки M3 в прорези в держателе сервопривода и закрепите болтами M3 длиной 12 мм.См. Рисунки ниже.
- Закрепите сервопривод micro в пазе, предусмотренном в показанной конфигурации. Будьте осторожны с положением и ориентацией сервоголовки и закрепите болтами M2 длиной 12 мм и гайками, как показано.
- Присоедините опорное звено и закрепите его на стойках с помощью болтов M3 8 мм.
Так выглядит наша вторая ссылка. Рупор сервопривода будет прикреплен к головке мини-сервопривода в нашем первом звене (шаг 16).
- Теперь соберем держатель ручки . Обратите внимание, что во втором собранном звене имеется свободная сервоголовка. Этот сервопривод будет поддерживать держатель ручки через микро-рог . Прикрепите микро-рожок к держателю ручки с помощью самонарезающих болтов M2 длиной 8 мм (из принадлежностей микросерво), как показано.
- Прикрепите держатель ручки ко второму звену , ввинтив винт (из принадлежностей сервопривода) через рог сервопривода , как это сделано на шаге 15.Имейте в виду, что микро сервопривод установлен на 90 градусов , как это сделано на шаге 14.
- Вспомните бесплатный сервомеханизм на втором собранном звене. Установите угол сервопривода 180 градусов , как это было сделано в шаге 14. Теперь мы прикрепим его к сервоголовке на первом собранном звене и зафиксируем их вместе, закрепив его с помощью болта, входящего в комплект принадлежностей сервопривода.
- Мы почти закончили.Остается только закрепить ручку . Затем поместите его в прорезь на подходящей высоте.
- Затяните болты M3 длиной 8 мм для удержания пера в держателе пера .
Примечание. Убедитесь, что все застежки надежно затянуты, иначе робот может покачиваться.
Шаг 2: Схема робота
Примечание: Убедитесь, что все сервоприводы правильно подключены и нет ослабленных проводов, иначе это может повлиять на работу рычага во время работы.Используйте кабельные стяжки для управления проводами.
Шаг 3: Код Arduino
В этой программе мы управляем роботизированной рукой с помощью потенциометров и ползункового переключателя.
- Базовый сервопривод управляется потенциометром 1
- Link 1 Сервопривод управляется потенциометром 2
- Link 2 Servo управляется ползунковым переключателем 1
Эта программа также показывает переменное напряжение на экране. <>
Осторожно : Роботизированная рука должна работать при 6 В с использованием источника питания 2 А.
Библиотеки: TFT_ST7735
Шаг 4: Заключение
На этом мы закончили работу с вашей современной роботизированной рукой!
Теперь творите чудеса с помощью своего робота для рисования!
Удачи! ????
Принципиальная схема| Описание | Принципиальная схема |
|---|---|
Убедитесь, что все сервоприводы правильно подключены и отсутствуют ослабленные провода, иначе это может повлиять на работу рычага во время работы.Используйте кабельные стяжки для управления проводами. |
Код
| Описание | Код загрузки | ||
|---|---|---|---|
| Sketching Robot Код Arduino | Скачать | ||
| Evive Library | Buesome | Скачать с Arduino You С Arduino можно реализовать практически любой проект, который только можно вообразить. На этот раз я составил список из 19 различных роботов, построенных на Arduino.Некоторые из них действительно просты, другие немного продвинуты. Итак, приступим: 1. Робот-аниматор Cat LaserБесконечное развлечение для вашей кошки. Развлеките свою кошку этим лазерным роботом. Он очень дешев и прост в сборке, требует всего два сервопривода, лазер и Arduino. Попробуйте это со своей кошкой. Знайте, как это сделать здесь. 2. Шахматный робот Этот шахматный робот спроектирован таким образом, что может дотянуться до всех 64 блоков.Игра начинается с хода игрока, а затем этот ход воздействует на сенсоры. Наконец, контроллер определит движение игрока и скажет роботу, куда двигаться – читайте здесь. 3. Робот для лазания по деревьямРобот, лазающий по деревьям. Этот проект – большая инженерная работа. Если вы хотите попробовать или вдохновитесь на другие связанные проекты, не стесняйтесь взглянуть на этот проект.
4. Машина для мыльных пузырейЭта автоматическая машина для производства пузырей обещает понравиться как детям, так и взрослым.Также с этой машиной ваша кошка получит бесконечное удовольствие. Подробнее о создании этого проекта см. Здесь. 5. Робот для рисованияЭтот робот был построен по мотивам рисунков мандалы. Создайте собственное произведение искусства, используя этот тип робота. Узнайте больше о том, как его построить здесь. 6. Двуногий робот-гуманоидПомимо простоты, этому двуногому роботу требуется всего четыре микро-серводвигателя, Arduino и макет. Вы можете легко добавить датчики и другие детали, чтобы сделать своего робота более крутым и сложным.Узнайте, как сделать здесь простого двуногого робота-гуманоида. 7. Робот с дистанционным управлениемЭтого робота с дистанционным управлением можно перемещать с помощью почти любого пульта дистанционного управления, например пульта от телевизора. Это возможно, потому что у этого робота есть ИК (инфракрасный) приемник, который может воспринимать ИК, излучаемые пультом дистанционного управления. Попробуйте, см. Инструкции здесь. 8. Робот-пылесосС этим роботом вам не нужно мыть пол.Он очистит его за вас. Попробуйте этого робота-пылесоса для пола, который использует моторный щит и управляется Arduino. Ознакомьтесь с инструкциями здесь. 9. Роботизированный барабанЭтот роботизированный барабан использует Arduino для управления двумя палочками. Все биты записываются прямо в программе Arduino. Если у вас есть группа, но нет барабанщика, вы можете создать своего собственного барабанщика. Довольно потрясающе. Узнайте больше об этом проекте здесь.
10.Многоцелевой ботЭто многофункциональное устройство выполняет несколько различных задач. Он перемещается с помощью 3 ИК-переключателей, играет в прятки, выбирает пути, обеспечивает звуковую и визуальную обратную связь через зуммер, ЖК-дисплей и многое другое. Это отличный проект, чтобы узнать больше о датчиках. См. Все подробности этого проекта здесь. 11. Балансировочный роботЭтот балансировочный робот работает по тому же принципу, что и Segway. Он ускоряет и замедляет колеса, чтобы удерживать систему в вертикальном положении.Этот принцип находит множество применений в нескольких проектах. Здесь вы можете ознакомиться с основами балансировочного робота. 12. Колесный робот MecanumЭтот автомобиль, как робот, движется в четырех направлениях без скручивания благодаря своим уникальным колесам. Вы можете купить полный комплект для сборки своего колесного робота Mecanum. Посмотрите на этого механического колесного робота, управляемого через Bluetooth.
13. Робофиш (на самом деле плавает в воде)Robofish – это робот-рыба, который плавает и распознает края аквариума, а также препятствия.Это простой проект с серводвигателями, инфракрасными датчиками и Arduino. Посмотрите здесь все шаги, чтобы построить вашу рыбу.
14. Клавиатура электронного фортепиано с предустановленными композициямиЭто действительно забавный проект с пьезозуммером и переключателями. Эта фортепианная клавиатура имеет 7 клавиш фортепиано и кнопку 8 и для доступа к меню предустановленных песен. Попробуйте этот проект и адаптируйте его для воспроизведения ваших любимых песен. 15. МакейМакей – автономный робот, который следует за объектами и избегает препятствий.Он использует двигатели постоянного тока для питания каждого из 2 ведущих колес. Подробнее о makey и о том, как его создать, читайте здесь. 16. Самополивающаяся установкаЭто очень полезный и простой проект, который идеально подойдет вам, если вы часто забываете поливать растения. В этом проекте используются водяной насос, управляемый Arduino, резервуар для воды и датчик почвы. Вот инструкция. 17. КвадрокоптерКвадрокоптеры– это круто! Соберите все инструменты и начните собирать свой квадрокоптер.Вероятно, вам нужно будет изучить несколько примеров и адаптировать каждый для создания нужного квадрокоптера. Вот хороший пример. 18. Робот со странным глазомЭтот странный робот был построен с использованием стартового набора Arduino. Подробнее см. Здесь. 19. Беспроводная аниматронная рука ArduinoЭта рука робота имитирует движения человека. Пользователь носит перчатку управления, которая точно управляет рукой аниматроника. Довольно круто! Узнайте здесь, как это сделать. ЗаключениеКакой ваш любимый робот? Что вы планируете строить дальше? Оставьте комментарий внизу! Поделитесь этим постом с другом, который тоже любит электронику. Руи П.С. Вот еще одно сообщение в блоге, посвященное модулям Arduino: «21 модуль Arduino, который можно купить менее чем за 2 доллара». Как построить робота Arduino? Комплекты и проекты для начала работыХотите узнать, как построить робота Arduino? В этом руководстве представлены наборы и проекты, которые помогут вам легко приступить к созданию одного из них! В прошлом создание роботов было дорогой и сложной задачей из-за огромного количества деталей и необходимого опыта.Тем не менее, с появлением Arduino и комплектов, оружия и деталей, которые идут вместе с ним, робототехника теперь представляет собой увлекательный и увлекательный процесс, который очень доступен! Что нужно для сборки робота Arduino?Первый шаг к созданию чего-либо – какие компоненты необходимы? Создание робота Arduino не является исключением, количество необходимых деталей зависит от того, какой тип робота вы собираетесь построить, а также от вашего бюджета! Вот список компонентов, которые обычно необходимы для создания базового робота Arduino:
Как уже упоминалось, приведенный выше список представляет собой лишь минимальные требования для создания простейшего робота Arduino.Однако существует множество различных частей, применимых для сборки роботов Arduino! Чтобы помочь вам расширить свой творческий потенциал и упростить процесс покупки всех деталей по отдельности, мы подготовили наборы роботов Arduino, которые включают в себя все основные компоненты / модули, которые вам понадобятся, чтобы легко начать работу! Наборы роботов Arduino Arduino Robot Kit Для начинающих: Starter Robot Kit (IR-версия) Собранный робот из стартового набора роботовКомпания Seeed предлагает комплект для роботов, который поможет вам легко приступить к созданию робота Arduino!
Всего включено 40 деталей.Чтобы просмотреть полный список деталей с указанием количества, перейдите на страницу нашего продукта! Комплект роботов-последователей Arduino Line: Базовый комплект для сборки роботов AlphaBot для ArduinoЕще один набор роботов Arduino, подходящий для начинающих, – это базовый комплект для сборки роботов Alphabot, описанный выше. Этот комплект работает на роботизированной платформе Alphabot, способной не только следовать за линией Arduino, но и избегать препятствий, измерять скорость и управлять ИК-сигналом! С этим комплектом вам не придется беспокоиться о том, что у вас нет платы Arduino, поскольку она поставляется с UNO plus, улучшенной и улучшенной альтернативой Arduino Uno R3 микроконтроллера! Этот набор роботов Arduino включает следующее:
На микроконтроллере…
Для полного сравнения функций UNO plus, UNO r3 и информации о наборе Alphabot Basic Robot Building вы можете перейти на нашу страницу продукта! Нужна альтернативная версия с дополнительным экраном и двухрежимным Bluetooth? Вы можете это проверить! Версия 2 Alphabot: AlphaBot2 Robot Building Kit для Arduino AlphaBot2Понравилось то, что вы видели в предыдущей рекомендации Alphabot, и подумали, что это так? Эта обновленная версия выводит строительство роботов Arduino на новый уровень! AlphaBot2 имеет двухуровневую структуру; нижнее базовое шасси и верхняя плата адаптера.Такая конструкция обеспечивает лучшую стабильность и совместимость! О, и по сравнению с другими наборами для сборки роботов, Alphabot2 не требует пайки и проводки! Структура AlphaBot2; Шасси с нижним основанием:
Характеристики верхней платы адаптера AlphaBot2: Хотите узнать больше? Вы можете ознакомиться со следующими ресурсами: Хотите глубже погрузиться в бесконечное творчество при создании проекта робота Arduino? Этот раздел сегодняшнего блога – тот, который вы ищете! Я продемонстрирую 10 самых интересных проектов роботов Arduino в сообществе! Не стесняйтесь черпать из него вдохновение! Несомненно, один из самых крутых роботов Arduino, который вы можете сделать сегодня, – это робот-паук Arduino. Благодаря MEGA DAS на hackster.io вы можете легко создать его уже сегодня! Что вам нужно для создания робота-паука Arduino? Компоненты оборудования: Хотите узнать больше об этом проекте? Вы можете ознакомиться с полным руководством MEGA DAS на hackster.io! Хотите создать робота-победителя, который успешно преодолел лабиринт в соревновании? Этот проект вам в этом поможет! Какая формула выигрыша? Вот полный список компонентов, которые вам понадобятся: Компоненты оборудования: Программные приложения и онлайн-сервисы: Хотите узнать больше об этом проекте? Вы можете ознакомиться с полным руководством MakerRobotics на сайте Hackster.io! В Интернете есть множество марсоходов Arduino, но с этим проектом марсохода Arduino гораздо проще собрать все компоненты вместе! Благодаря интеграции системы Grove, вы можете просто добавлять датчики и исполнительные механизмы с помощью Plug and Play, устраняя необходимость в макетной плате! Что вам нужно? Компоненты оборудования: Программные приложения и онлайн-сервисы: Хотите узнать больше об этом проекте? Вы можете ознакомиться с полным руководством shadeydave на Seeed Project Hub! Соревнования роботов сумо, происходящие от термина «сумо» в Японии, стали обычным явлением в наши дни, когда два робота помещаются в кольцо и пытаются вытолкнуть друг друга! Итак, вы хотите построить достаточно конкурентоспособного робота, способного противостоять борьбе сумо? Вот проект робота-сумо на Arduino, который поможет вам приступить к созданию робота для этого нокаута! Что вам нужно? Компоненты оборудования: Программные приложения и онлайн-сервисы: Хотите узнать больше об этом проекте? Вы можете ознакомиться с полным руководством AhmedAzouz на сайте hackster.io! Первое, что приходит на ум, когда кого-то спрашивают, как выглядит робот, – это роботы, похожие на людей. Эти похожие на человека роботы также известны как роботы-гуманоиды. Этот проект поможет вам построить гуманоидного робота, которым вы сможете управлять с помощью Андриода. Его можно использовать на пересеченной местности, а также есть функция обнаружения падения! Что вам нужно? Компоненты оборудования: Хотите узнать больше об этом проекте? Вы можете ознакомиться с полным руководством Аджита Валаппила на Seeed Project Hub! Далее, робот, который балансирует сам по себе? Да, вы не читаете и не видите это неправильно. Вы действительно можете построить самобалансирующегося робота Arduino, который передвигается на двух колесах! Выглядит круто? Вот что вам понадобится: Компоненты оборудования: Ручные инструменты и технологические станки: Хотите узнать больше об этом проекте? Вы можете ознакомиться с полным руководством Стефана Шульца о хакере.io! Хотите сверхдорогой гексапод Arduino с возможностью 3D-печати и управлением по Bluetooth? Vorpal The Hexapod – это проект, который вы можете легко настроить так, как хотите! Кроме того, этот гексапод оснащен системой крепления, позволяющей создавать собственные 3D-печатные украшения и игровые приставки! Что вам нужно? Компоненты оборудования: Ручные инструменты и производственные машины: Хотите узнать больше об этом проекте? Вы можете ознакомиться с полным руководством Team Vorpal Robotics на сайте Hackster.io! Если вам нужен продвинутый и мощный робот, этот проект для вас! Delta известны своими приложениями для захвата и сборки, способными двигаться с высокой скоростью и быстро и последовательно выполнять повторяющиеся задачи. С помощью этого проекта вы можете построить дельта-робота Arduino, который можно подключить к Raspberry Pi для игры в крестики-нолики! Что вам понадобится: Компоненты оборудования: Программные приложения и онлайн-сервисы: Ручные инструменты и технологические станки: Несмотря на исчерпывающий список запчастей, если вы любите строить, это то, что вам нужно! Хотите узнать больше? Вы можете ознакомиться с полным руководством geordag на Hackster.io! Вы когда-нибудь пробовали автоматическую уборку с помощью роботов-уборщиков? Если вы когда-либо пробовали, скорее всего, вы используете робота Roomba. В таком случае этот проект для вас! Этот проект направлен на подключение Arduino к Roomba через последовательный порт для развертывания команд! Что вам нужно? Компоненты оборудования: Программные приложения и онлайн-сервисы: Хотите узнать больше об этом проекте? Вы можете ознакомиться с полным руководством MJRoBot на Hackster.io! Не справляетесь с рисованием и хотите запрограммировать рисовального робота Arduino в помощь? Этот последний проект – то, что вы ищете! На основе DrawingBot от MakerC есть 5 новых файлов 3D / STL, которые можно использовать для повышения устойчивости слайдера для головы, включая наклон пера. Вы также можете установить 3 варианта поворота (прямой / 25 градусов / 50 градусов). Что вам нужно? Компоненты оборудования: Программные приложения и онлайн-сервисы: Хотите узнать больше об этом проекте? Вы можете ознакомиться с полным руководством от avanhanegem на Thingiverse! В целом, сборка роботов Arduino – это веселое и легкое хобби, которым стоит научиться! Я надеюсь, что сегодняшний блог поможет вам глубже понять, что нужно для его создания! Если вы хотите легко начать работу с ним, рассмотрите рекомендуемые наборы роботов Arduino, представленные сегодня! Следите за нами и ставьте лайки: Часы, отображающие время.Создан с учетом возможностей сборки в fablab / makerspace / hackerspace. Вам нужно: Лазерный резак или 3D-принтер 1 Ардуино 3 сервопривода 1 ручка для сухих салфеток Гайка, болт М3, метчик Обновление до V1.01: добавлена процедура калибровки и документация в код Arduino см. Вкладку с инструкциями выше для инструкций по сборке http://wiki.fablab-nuernberg.de/w/Ding:Plotclock(german) http: // www.youtube.com/watch?v=iOLFP90DneY https://github.com/9a/plotclock (не поддерживается!) Обновление 15.08: вы можете взглянуть на http://www.thingiverse.com/thing:931498/#instructions для получения более подробной документации Обновление 10/15: Вам также следует проверить http://www.instructables.com/id/Plot-Clock-for-dummies/?ALLSTEPS Спасибо Kjetil Egeland! (для версии 1.01!) 1. Лазерная резка plotclock_beta1.pdf из материала толщиной 3 мм или 3D печать plotclock_SUP7.skp 2.Напечатайте на 3D-принтере swee.stl или используйте другую цилиндрическую деталь для подметальной машины 3. Забейте отверстия 2,5 мм резьбой M3 4. Соберите рычаги с помощью винтов M3, осторожно отрегулируйте контргайки так, чтобы в соединениях под головками винтов было достаточно люфта для плавного движения (см. Рисунок соединения). 5. загрузите скетч для Arduino plotclock_V1, дополнительную информацию см. В комментариях к коду http://playground.arduino.cc/Code/time необходима библиотека 6. Добавьте ткань с двусторонним скотчем к подметальной машине 7.Подключите сервоприводы к цифровым контактам 2, 3 и 4, в соответствии с эскизом Arduino, протестируйте их без каких-либо подключений, подключив Arduino (на фотографиях показано, что он подключен к 1, 2 и 3, что не является оптимальным, поскольку 1 также является Контакт TX, поэтому во время запуска Arduino сервопривод подъема скачет) 8.Сложите все вместе 9. При прикреплении сервомеханизмов убедитесь, что они могут поворачиваться достаточно, чтобы достичь каждой точки на поверхности чертежа, повернув их вручную 10. Включите Arduino, он должен начать цикл калибровки, в котором каждую секунду положение обоих сервоприводов изменяется путем поворота ровно на 90 градусов (см. Последнее изображение в галерее). 11.Измените значения SERVOFAKTOR, SERVOLEFTNULL и SERVORIGHTNULL, пока все не совпадет (дополнительную информацию см. В коде) 12. Закрепляйте ручку и держатель щетки только после проверки всего остального Plotclock Code.rar Plotclock Instroduction library.rar Мы иногда используем партнерские ссылки в нашем контенте.Это вам ничего не будет стоить, но поможет нам компенсировать расходы на оплату труда нашей команды писателей. Вы можете поддержать нас прямо на BuyMeACoffee. Спасибо! У вас есть несколько эскизов Arduino, которые вы хотите объединить в один? Тогда следите за обновлениями этого урока! На этой неделе у меня возник вопрос об объединении скетчей Arduino. И для тех из вас, кто никогда этого не делал, вам может быть очень приятно узнать, что на самом деле это довольно просто. В этом руководстве предполагается, что вы уже знаете, что такое Arduino, как создавать скетч и запускать код на своей плате.Если вы ничего не создавали в Arduino, то это руководство не будет иметь смысла. Я рекомендую сначала ознакомиться с нашим учебником “Четыре шага к написанию любой программы Arduino”, прежде чем углубляться в это. Следует отметить, что перед тем, как мы начнем, это руководство не принимает во внимание несколько потоков или одновременные события . В ближайшем будущем я создам руководство о том, как это сделать. Мы просто рассмотрим перенос методов из одной процедуры в другую и проверку системной интеграции. В этом примере мы условно добавим музыку к нашему анимированному черепу. Уже прошел Хэллоуин, но ничего страшного! Может быть, вы из тех, кто любит хранить украшения до Дня Благодарения! У нас есть один скетч, который управляет музыкой черепа, а другой скетч управляет датчиками и сервоприводом для перемещения головы. Возьмите копии обоих этих набросков и следуйте им. Сначала откройте третий пустой эскиз и назовите его «Объединенный череп.я не”. Мы скомпилируем содержимое двух предыдущих файлов в объединенный файл. Я рекомендую делать это таким образом, а не брать контент из одного эскиза и вставлять его в другой. Это связано с тем, что вы можете столкнуться с проблемами компиляции или функциональными проблемами при передаче кода. Если у вас есть исходные файлы для работы (и они оба работают независимо), вы всегда можете вернуться к началу и начать все заново. Смешанный код становится некрасивым, поэтому полезно начинать с чистого листа. Для начала мы начнем сверху вниз и перенесем глобальные переменные, Затем мы скопируем содержимое метода Наконец, мы вызовем Когда все будет готово, обязательно скомпилируйте код, загрузите его в Arduino и протестируйте. Убедитесь, что проводка ваших контактов ввода / вывода соответствует контактам, указанным в коде, иначе это не сработает! Если вы ищете более формализованное обучение Arduino, обязательно ознакомьтесь с нашим онлайн-курсом «Прототипирование Arduino для начинающих». Мы берем студентов, у которых нет опыта, к тому, чтобы они знали, как создавать, подключать и программировать нестандартные прототипы.Похоже, хорошо подходит? Посмотрите здесь. (PDF) Разработка и реализация рисовального бота с использованием Matlab и Arduino Mega978-1-5090-5627-9 / 17 / $ 31,00 © 2017 IEEE Разработка и реализация рисовального бота с использованием Matlab and Ardiuno Mega Mohammed Saifuddin Munna, Bijoy Kumar Tarafder, Md. Golam Robbani, Tuton Chandra Mallick Департамент электротехники и электроники Premier University, Chittagong [email protected], [email protected], [email protected], [email protected] Аннотация. Недавние исследования роботов пытались разработать интеллектуальных роботов, которые могут соответствовать человеческому поведению на интеллектуальных задачах высокого уровня, требующих распознавания, сложных движений и интеллекта. За последние несколько лет роботу дали около художественного поведения, что робот может петь, танцевать, даже робот может играть в игр.В этой статье представлен метод управления роботизированной рукой , позволяющий роботу приобретать другое человеческое художественное поведение «рисунок». В предложенном дизайне MATLAB использовался для интерфейса обработки изображений и расчета траектории. Значение координатное положение пикселя двоичного изображения преобразуется в угла сочленения с применением обратной кинематики, а сервоприводы управляются с помощью Arduino Mega. Собел и Кэнни применяются для метода обнаружения кромок , и авторы показали сравнение выходных изображений после применения метода обнаружения кромок Собела и Кэнни.Изображение вводится через графический интерфейс Matlab, который является интерактивным пользователем . Ключевые слова – Matlab; Графический интерфейс; Кинематика роботов; Обнаружение края; Обработка изображений, Arduino Mega I. ВВЕДЕНИЕ Робототехническая промышленность стала гигантским сектором в мире последних . Ученые и технологи пытались добавить различных измерений в поведение роботов. Современные разработки в области робототехники имеют различные виды применения в широком диапазоне отраслей промышленности, включая образование, здравоохранение, бытовые услуги, военные, развлечения и т. Д.Рисование – это искусство , которое требует высокой степени художественного и новаторского менталитета человеческого разума. Так что приучить робота к этому инновационному искусству – сложная задача. Наша исследовательская работа состоит в том, чтобы добавить другой оттенок поведения роботов в художественной манере , которая привлекает внимание, дружелюбна к людям и вдохновляет обычных людей, которые должны знать о деятельности роботов. По сути, роботизированная рука Sketcher – это роботизированная рука с 2 степенями свободы , которая может рисовать человеческое лицо.Он выполняет несколько базовых действий роботизированной системы управления, которые были предназначены для разработки с максимально возможной точностью с локально доступным оборудованием . Мы создали графический пользовательский интерфейс Matlab для ввода изображения . Изображение фильтруется с помощью нескольких инструментов фильтрации , чтобы сделать его двоичным изображением, которое подходит для понимания роботом . II. СВЯЗАННЫЕ С РАБОТА Было проведено несколько исследований системы поколения человеческого портрета.Некоторые исследователи провели исследование роботов-рисовальщиков. Лаборатория ZKM создала первую систему портретирования роботов в реальном времени, в которой промышленный робот нарисовал портрет лица человека, сидящего перед камерой [1]. Швейцария Лаборатория LASA-EPFL разработала наиболее полную систему картографических роботов, объединяющую гуманоидного робота Fujitsu HOAP-2 с новой технологией обработки изображений для рисования портрета [2].В [3] представлен метод управления роботом на основе поведения для рисования кистью, в котором вместо точек пересечения было принято дифференциального движения. В [4] представлена роботизированная рука с 3 степенями свободы, используемая для рисования на листе бумаги, который построен с использованием кубиков LEGO NXT . Исследование в [2] направлено на разработку системы поколения портретов человека , которая позволяет двухрукому гуманоидному роботу , Пике, автономно рисовать портрет лица человека , сидящего перед Пикой.Бетти, робот для рисования портретов , был разработан с использованием модифицированного тета-графа, получившего название Furthest Neighbor Theta-graph [6]. В указанных ссылках применялись различные методы контроля. Некоторые из них слишком сложные, некоторые стоят дорого, некоторые обширны, хотя каждое исследование пробовало , чтобы найти лучший способ рисования. Мы хотели сделать робота свободным от сложности, поэтому мы использовали руку с 2 степенями свободы. Мы попробовали , чтобы дать роботу простой интерфейс и возможность легко модифицировать , поэтому мы использовали Matlab и его графический интерфейс. III. СИСТЕМА КОНСТРУКЦИЯ A. Рабочий процесс Блок-схема рабочего процесса приведена на рисунке 1. Изображение вводится в систему через графический интерфейс Matlab. Изображение может быть получено камерой, подключенной к последовательному порту, или может быть получено с указанного пути на компьютере. Сделанное изображение является RGB, поэтому система преобразует изображение в оттенки серого . Затем изображение в градациях серого преобразуется в двоичное изображение методом обнаружения краев.Двоичное изображение – это не что иное, как комбинация черных и белых пикселей. Matlab вычисляет необходимый расчет обратной кинематики , принимая координаты черного пикселя, и отправляет угол сочленения сервоприводов на 769 Международная конференция по электротехнике, вычислительной технике и технике связи (ECCE), 16-18 февраля 2017 г. |
