
Узнать мощность электродвигателя по диаметру вала без бирки
При замене сломанного советского электродвигателя на новый, часто оказывается, что на нем нет шильдика. Нам часто задают вопросы: как узнать мощность электродвигателя? Как определить обороты двигателя? В этой статье мы рассмотрим, как определить параметры электродвигателя без бирки – по диаметру вала, размерам, току.
Как определить мощность?
Существует несколько способов определения мощности электродвигателя: диаметру вала, по габариту и длине, по току и сопротивлению, замеру счетчиком электроэнергии.
По габаритным размерам
Все электродвигатели отличаются по габаритным размерам. Определить мощность двигателя можно сравнив габаритные размеры с таблицей определения мощности электродвигателя, перейдя по ссылке габаритно-присоединительные размеры электродвигателей АИР.
Какие размеры необходимо замерить:
- Длина, ширина, высота корпуса
- Расстояние от центра вала до пола
- Длина и диаметр вала
- Крепежные размеры по лапам (фланцу)
По диаметру вала
Определение мощности электродвигателя по диаметру вала – частый запрос для поисковых систем. Но для точного определения этого параметра недостаточно – два двигателя в одном габарите, с одинаковыми валами и частотой вращения могут иметь различную мощность.
Но для точного определения этого параметра недостаточно – два двигателя в одном габарите, с одинаковыми валами и частотой вращения могут иметь различную мощность.
Таблица с привязкой диаметров валов к мощности и оборотам для двигателей АИР и 4АМ.
| Мощность электродвигателя Р, кВт | Диаметр вала, мм | Переход к модели | |||
| 3000 об/мин | 1500 об/мин | 1000 об/мин | 750 об/мин | ||
| 0,18 | 11 | 11 | 14 | – | АИР56А2, АИР56В4, АИР63А6 |
| 0,25 | 14 | 19 | АИР56В2, АИР63А4, АИР63В6, АИР71В8 | ||
| 0,37 | 14 | 19 | 22 | АИР63А2, АИР63В4, АИР71А6, АИР80А8 | |
| 0,55 | 19 | АИР63В2, АИР71А4, АИР71В6, АИР80В8 | |||
| 0,75 | 19 | 22 | 24 | АИР71А2, АИР71В4, АИР80А6, АИР90LA8 | |
| 1,1 | 22 | АИР71В2, АИР80А4, АИР80В6, АИР90LB8 | |||
| 1,5 | 22 | 24 | 28 | АИР80А2, АИР80В4, АИР90L6, АИР100L8 | |
| 2,2 | 24 | 28 | 32 | АИР80В2, АИР90L4, АИР100L6, АИР112МА8 | |
| 3 | 24 | 32 | АИР90L2, АИР100S4, АИР112МА6, АИР112МВ8 | ||
| 4 | 28 | 28 | 38 | АИР100S2, АИР100L4, АИР112МВ6, АИР132S8 | |
| 5,5 | 32 | 38 | АИР100L2, АИР112М4, АИР132S6, АИР132М8 | ||
| 7,5 | 32 | 38 | 48 | АИР112M2, АИР132S4, АИР132М6, АИР160S8 | |
| 11 | 38 | 48 | АИР132M2, АИР132М4, АИР160S6, АИР160М8 | ||
| 15 | 42 | 48 | 55 | АИР160S2, АИР160S4, АИР160М6, АИР180М8 | |
| 18,5 | 55 | 60 | АИР160M2, АИР160M4, АИР180М6, АИР200М8 | ||
| 22 | 48 | 55 | 60 | АИР180S2, АИР180S4, АИР200М6, АИР200L8 | |
| 30 | 65 | АИР180M2, АИР180M4, АИР200L6, АИР225М8 | |||
| 37 | 55 | 60 | 65 | 75 | АИР200M2, АИР200M4, АИР225М6, АИР250S8 |
| 45 | 75 | 75 | АИР200L2, АИР200L4, АИР250S6, АИР250M8 | ||
| 55 | 65 | 80 | АИР225M2, АИР225M4, АИР250M6, АИР280S8 | ||
| 75 | 65 | 75 | 80 | АИР250S2, АИР250S4, АИР280S6, АИР280M8 | |
| 90 | 90 | АИР250М2, АИР250M4, АИР280M6, АИР315S8 | |||
| 110 | 70 | 80 | 90 | АИР280S2, АИР280S4, АИР315S6, АИР315M8 | |
| 132 | 100 | АИР280M2, АИР280M4, АИР315M6, АИР355S8 | |||
| 160 | 75 | 90 | 100 | АИР315S2, АИР315S4, АИР355S6 | |
| 200 | АИР315M2, АИР315M4, АИР355M6 | ||||
| 250 | 85 | 100 | АИР355S2, АИР355S4 | ||
| 315 | – | АИР355M2, АИР355M4 | |||
По показанию счетчика
Как правило измерение счетчика отображаются в киловаттах (далее кВт).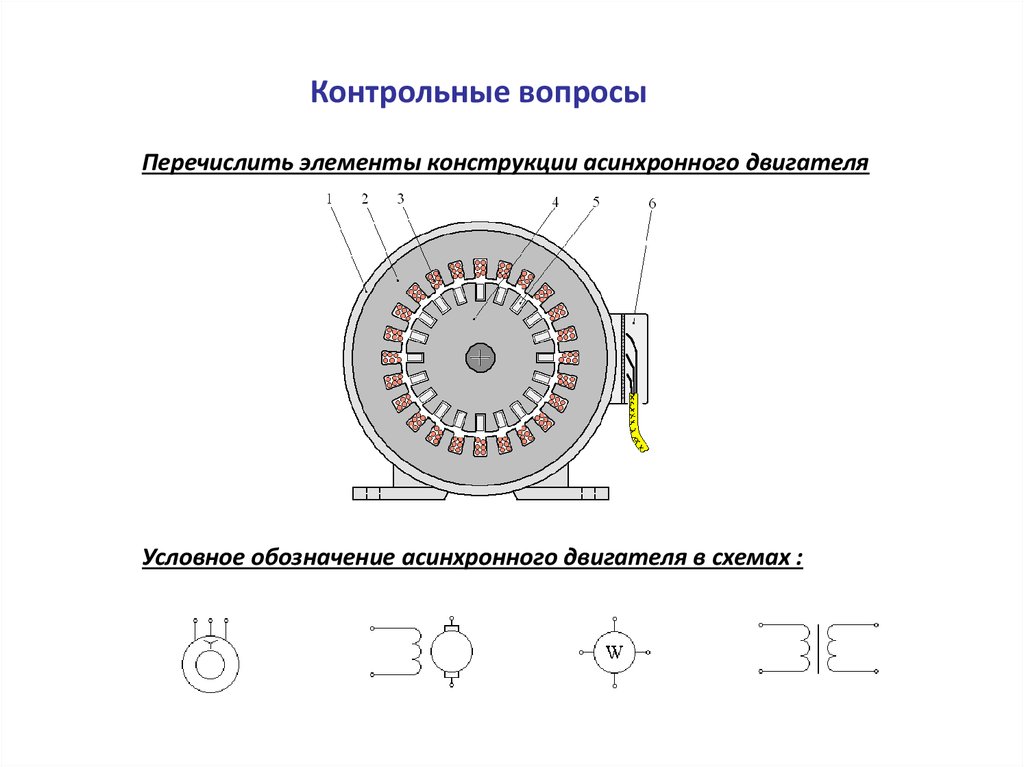 Для точности измерения стоит отключить все электроприборы или воспользоваться портативным счетчиком. Мощность электродвигателя 2,2 кВт, подразумевает что он потребляет 2,2 кВт электроэнергии в час.
Для точности измерения стоит отключить все электроприборы или воспользоваться портативным счетчиком. Мощность электродвигателя 2,2 кВт, подразумевает что он потребляет 2,2 кВт электроэнергии в час.
Для измерения мощности по показанию счетчика нужно:
- Подключить мотор и дать ему поработать в течении 6 минут.
- Замеры счетчика умножить на 10 – получаем точную мощность электромотора.
Расчет мощности по току
Для начала нужно подключить двигатель к сети и замерить показатели напряжения. Замеряем потребляемый ток на каждой из обмоток фаз с помощью амперметра или мультиметра. Далее, находим сумму токов трех фаз и умножаем на ранее замеренные показатели напряжения, наглядно в формуле расчета мощности электродвигателя по току.
- P – мощность электродвигателя;
- U – напряжение;
- Ia – ток 1 фазы;
- Ib – 2 фазы;
- Ic – 3 фазы.
Переходите по ссылке, чтобы узнать как определить ток электродвигателя по мощности
Определение оборотов вала
Асинхронные трехфазные двигатели по частоте вращения ротора делятся 4 типа: 3000, 1500, 1000 и 750 об.
- АИР 180 М2 – где 2 это 3000 оборотов.
- АИР 180 М4 – 4 это 1500 об. мин.
- АИР 180 М6 – 6 обозначает частоту вращения 1000 об/мин.
- АИР 180 М8 – 8 означает, что частота вращения выходного вала 750 оборотов.
Самый простой способ определить количество оборотов трехфазного асинхронного электродвигателя – снять задний кожух и посмотреть обмотку статора.
У двигателя на 3000 об/мин катушка обмотки статора занимает половину окружности – 180 °, то есть начало и конец секции параллельны друг другу и перпендикулярны центру. У электромоторов 1500 оборотов угол равен 120 °, у 1000 – 90 °. Схематический вид катушек изображен на чертеже. Все обмоточные данные двигателей смотрите в таблице.
Узнать частоту вращения с помощью амперметра
Узнать обороты вала двигателя, можно посчитав количество полюсов. Для этого нам понадобится миллиамперметр – подключаем измерительный прибор к обмотке статора.
- 2 полюса – 3000 об/мин
- 4 полюса – 1500 об/мин
- 6 полюса – 1000 об/мин
- 8 полюса – 750 об/мин
Если не получилось узнать мощность и обороты
Если не получилось узнать мощность и обороты электродвигатели или вы не уверены в измерениях – обращайтесь к специалистам «Систем Качества». Наши специалисты помогут подобрать нужный мотор или провести ремонт сломанного электродвигателя АИР.
Эта запись была опубликована Полезные статьи и обзоры.Асинхронный электродвигатель. Устройство и принцип действия. – www.motors33.ru
Асинхронный электродвигатель имеет две основные части – статор и ротор. Неподвижная часть двигателя называется статор. С внутренней стороны статора сделаны пазы, куда укладывается трехфазная обмотка, питаемая трехфазным током. Вращающаяся часть машины называется ротор, в пазах его тоже уложена обмотка.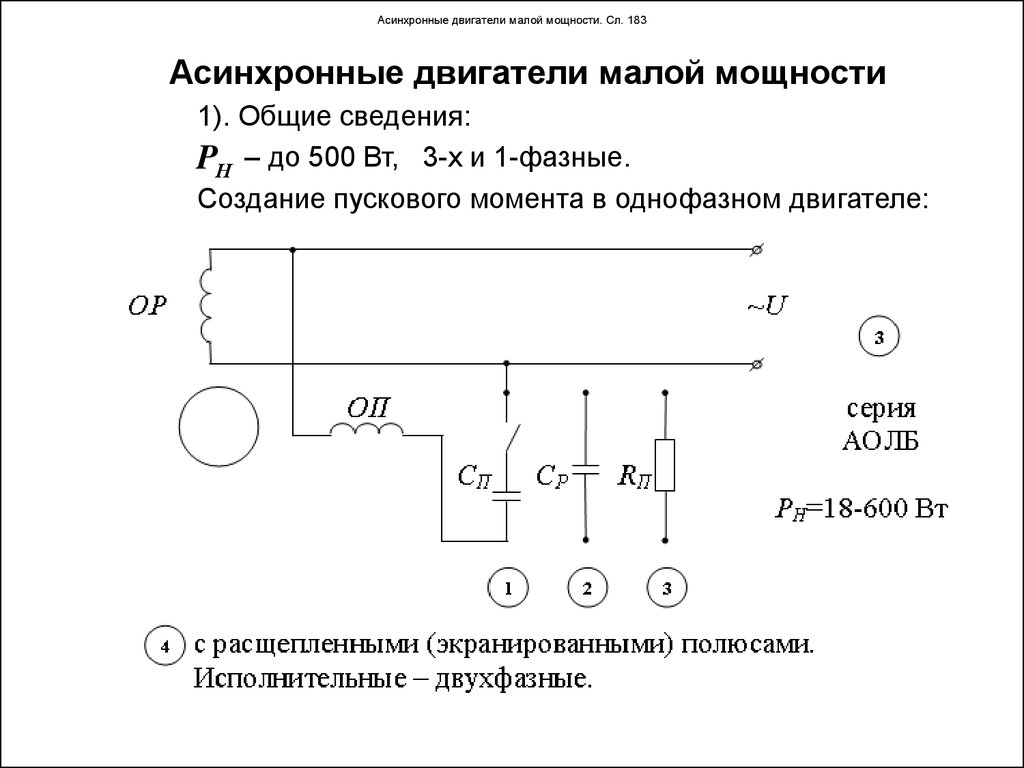 Статор и ротор собираются из отдельных штампованных листов электротехнической стали толщиной 0,35-0,5 мм. Отдельные листы стали изолируются один от другого слоем лака. Воздушный зазор между статором и ротором делается как можно меньше (0,3-0,35 мм в машинах малой мощности и 1-1,5 мм в машинах большой мощности).
Статор и ротор собираются из отдельных штампованных листов электротехнической стали толщиной 0,35-0,5 мм. Отдельные листы стали изолируются один от другого слоем лака. Воздушный зазор между статором и ротором делается как можно меньше (0,3-0,35 мм в машинах малой мощности и 1-1,5 мм в машинах большой мощности).
В зависимости от конструкции ротора асинхронные двигатели бывают с короткозамкнутым и с фазным роторами. Наибольшее распространение получили двигатели с короткозамкнутым ротором, они просты по устройству и удобны в эксплуатации.
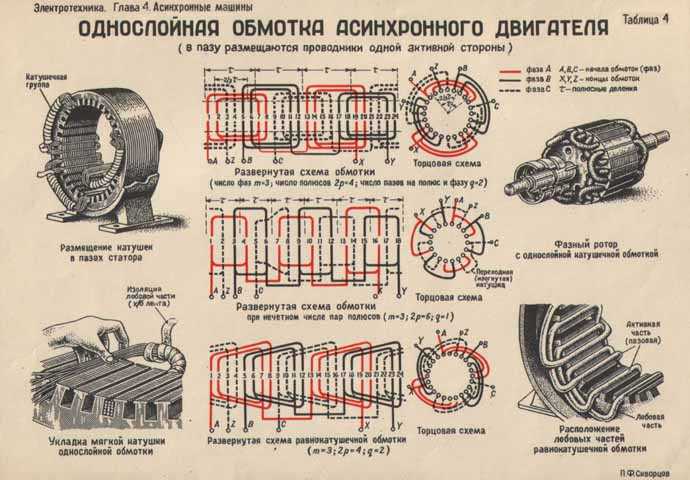
Трехфазная обмотка статора помещается в пазы и состоит из ряда катушек, соединенных между собой. Каждая катушка сделана из одного или нескольких витков, изолированных между собой и от стенок паза.
Рис. 1. Различные виды обмотки статора асинхронных электродвигателей
На рис. 1, а) показана обмотка статора асинхронного электродвигателя. У этой обмотки каждая катушка состоит из двух проводников. Обмотка, состоящая из трех катушек, создает магнитное поле с двумя полюсами. За один период трехфазного тока магнитное поле сделает один оборот. При частоте 50 Гц это будет соответствовать 50 об/сек, или 3000 об/мин.
За один период трехфазного тока магнитное поле сделает один оборот. При частоте 50 Гц это будет соответствовать 50 об/сек, или 3000 об/мин.
На рис. 1, б) показана обмотка, у которой каждая сторона катушки состоит из двух проводников.
Скорость вращения магнитного поля четырехполюсного статора вдвое меньше скорости вращения поля двухполюсного статора, т. е. 1500 об/мин (при 50 Гц). Обмотка четырехполюсного статора с одним проводником на полюс и фазу показана на рис. 1, в), а с двумя проводниками на полюс и фазу – на рис. 1, г). Магнитное поле шестиполюсного статора имеет втрое меньшую скорость, чем двухполюсного, т. е. 1000 об/мин (при 50 Гц). Обмотка шестиполюсного статора с одним проводником на полюс и фазу представлена на рис. 1, д). Число всех пазов на статоре равно утроенному произведению числа полюсов статора на число пазов, приходящееся на полюс и фазу.
Асинхронный электродвигатель с короткозамкнутым ротором является самым распространенным из электрических двигателей, применяемых в промышленности. Рассмотрим его устройство. На неподвижной части двигателя – статоре 1 – размещается трехфазная обмотка 2 (рис. 2), питаемая трехфазным током. Начала трех фаз этой обмотки выводятся на общий щиток, укрепленный снаружи на корпусе электродвигателя.
Рассмотрим его устройство. На неподвижной части двигателя – статоре 1 – размещается трехфазная обмотка 2 (рис. 2), питаемая трехфазным током. Начала трех фаз этой обмотки выводятся на общий щиток, укрепленный снаружи на корпусе электродвигателя.
Рис. 2. Асинхронный электродвигатель с короткозамкнутым ротором
Собранный сердечник статора укрепляют в чугунном корпусе 3 двигателя. Вращающуюся часть двигателя – ротор 4 – собирают также из отдельных листов стали. В пазы ротора закладывают медные стержни, которые с двух сторон припаивают к медным кольцам
Рис. 3. Короткозамкнутый ротор
а — ротор с короткозамкнутой обмоткой, б — «беличье колесо»,
в — короткозамкнутый ротор, залитый алюминием;
1 — сердечник ротора, 2 — замыкающие кольца, 3 — медные стержни,
4 — вентиляционные лопатки
Таким образом, все стержни оказываются замкнутыми с двух сторон накоротко. Если представить себе отдельно обмотку такого ротора, то она по внешнему виду будет напоминать «беличье колесо». В настоящее время у всех двигателей мощностью до 100 кВт «беличье колесо» делается из алюминия путем заливки его под давлением в пазы ротора. Вал 6 вращается в подшипниках, закрепленных в подшипниковых щитах 7 и 8. Щиты при помощи болтов крепятся к корпусу двигателя. На один конец вала ротора насаживается шкив для передачи вращения рабочим машинам или станкам.
В настоящее время у всех двигателей мощностью до 100 кВт «беличье колесо» делается из алюминия путем заливки его под давлением в пазы ротора. Вал 6 вращается в подшипниках, закрепленных в подшипниковых щитах 7 и 8. Щиты при помощи болтов крепятся к корпусу двигателя. На один конец вала ротора насаживается шкив для передачи вращения рабочим машинам или станкам.
Устройство статора асинхронного двигателя с фазным ротором и его обмотка не отличаются от устройства статора двигателя с короткозамкнутым ротором. Различие между этими электродвигателями заключается в устройстве ротора.
Рис. 4. Разрез асинхронного двигателя с фазным ротором
1 — вал двигателя, 2 — ротор, 3 — обмотка ротора, 4 — статор, 5 — обмотка статора, 6 — корпус, 7 — подшипниковые крышки, 8 — вентилятор, 9 — контактные кольца
Фазный ротор имеет три фазные обмотки, соединенные между собой звездой (реже треугольником). Концы фазных обмоток ротора присоединяют к трем медным кольцам, укрепленным на валу ротора и изолированным как между собой, так и от стального сердечника ротора, вследствие чего этот двигатель получил также название двигателя с контактными кольцами.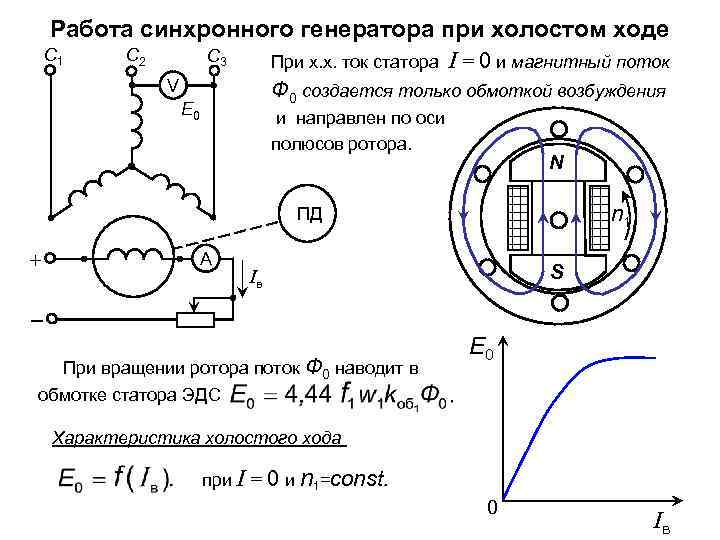 Три кольца жестко насажены на вал ротора (через изоляционные прокладки). На кольца накладываются щетки, которые размещены в щеткодержателях, укрепленных на одной из подшипниковых крышек.
Три кольца жестко насажены на вал ротора (через изоляционные прокладки). На кольца накладываются щетки, которые размещены в щеткодержателях, укрепленных на одной из подшипниковых крышек.
Щетки, скользящие по поверхности колец ротора, все время имеют с ними хороший электрический контакт и соединены, таким образом, с обмотками ротора. Щетки соединены с трехфазным реостатом.
Источник: Кузнецов М. И. Основы электротехники. Учебное пособие.
Изд. 10-е, перераб. «Высшая школа», 1970.
Motors Basic — Основные принципы — Асинхронные двигатели переменного тока — Часть 2
Понимание основ электродвигателей жизненно важно для выбора правильного двигателя для правильного применения. В этой статье мы рассмотрим принципы работы постоянного и переменного тока и простой работы двигателя.
Асинхронные двигатели переменного тока
В вентиляторах Woods Air Movements чаще всего используются асинхронные двигатели переменного тока.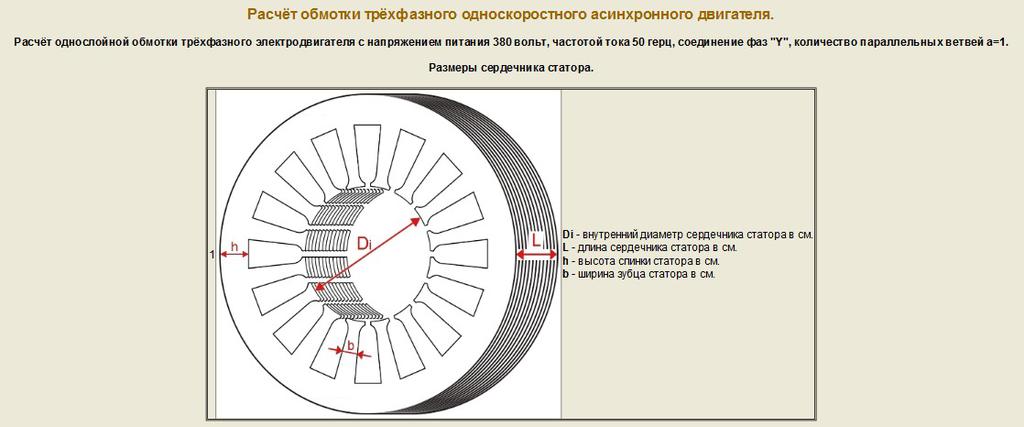 Они могут работать непосредственно от электросети, они надежны, требуют минимального обслуживания и относительно недороги.
Они могут работать непосредственно от электросети, они надежны, требуют минимального обслуживания и относительно недороги.
В трехфазном асинхронном двигателе переменного тока катушки изолированного провода находятся в пазах статора, расположенных в корпусе. Эти катушки сконфигурированы так, чтобы обеспечить набор электромагнитных полюсов для каждой из трех электрических фаз (U, V и W) при подаче питания.
На рис. 1 показан двигатель, обмотки которого расположены так, чтобы обеспечить пару полюсов для каждой фазы (обозначены U1 и U2, V1 и V2, W1 и W2). Поскольку на каждую фазу приходится два полюса, это описывается как двухполюсная конфигурация; если бы для каждой фазы было две пары полюсов, это была бы 4-полюсная конфигурация — и так далее.
Когда катушки в статоре подключены к источнику переменного тока, будет протекать электрический ток и создавать магнитное поле — катушки намотаны так, что полюса в каждой паре имеют противоположную полярность.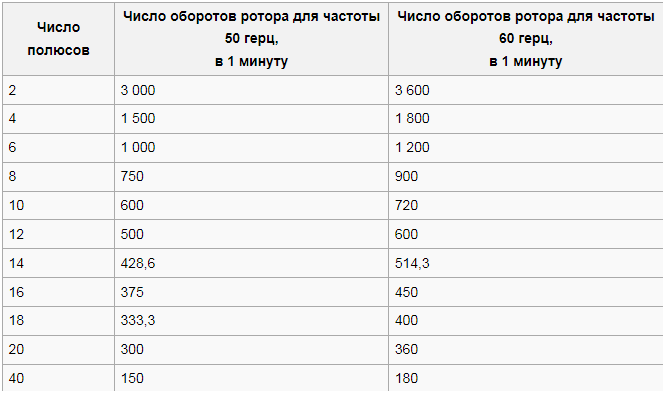
Рисунок 1. Циклическое вращающееся магнитное поле в трехфазном асинхронном двигателе переменного тока
Циклический характер формы волны переменного тока приводит к тому, что магнитное поле вращается вокруг центральной оси статора с двумя северными и двумя южными полюсами. в любое время. Скорость этого вращения определяется количеством пар полюсов и частотой электропитания (либо 50 Гц, либо 60 Гц — см. «Основы двигателей, часть первая»).
При наличии одной пары полюсов магнитное поле совершает один оборот за электрический цикл; где есть две пары, магнитное поле совершает один оборот за два цикла, а там, где есть три пары, оно вращается один раз за три цикла.
Основное уравнение для установления синхронной скорости заключается в следующем:
Синхронная скорость (Rev/Min) = 2 x Частота питания x 60
Количество полюсов для каждой фазы
Таким образом, если двигатель на рисунке 1 работал на подаче 50 Гц, синхронная скорость будет:
2 x 50 x 60 = 3000 Rev/Min
2
Таким образом, видно, что чем больше число полюсов, тем медленнее будет синхронная скорость, поэтому двигатель с 12 полюсами на фазу будет иметь синхронную скорость всего 500 об/мин.
Ротор
Наряду со статором наиболее важной частью асинхронного двигателя переменного тока является ротор. Он состоит из стержней ротора, обычно изготовленных из алюминия или меди, которые на своих концах соединены с кольцами из того же материала. Иногда его называют ротором с «беличьей клеткой» (см. рис. 2).
Поскольку ротор расположен во вращающемся магнитном поле статора, возникающие линии магнитного потока будут разрезать стержни ротора и индуцировать напряжение в роторе. Это, в свою очередь, приведет к протеканию электрического тока по стержням ротора (обозначенному на рис. 2 красными стрелками), который создаст собственное магнитное поле вокруг стержней ротора. Это магнитное поле взаимодействует с магнитным полем статора, создавая силу на стержнях ротора, заставляя ротор вращаться вокруг своей оси.
Рисунок 2. Ротор с «беличьей клеткой»
Поскольку напряжение в стержнях ротора создается магнитным полем в статоре, прорезающим стержни ротора, если ротор вращается с синхронной скоростью, не будет относительное движение между стержнями ротора и магнитным полем статора, в результате чего в стержнях ротора не индуцируется напряжение.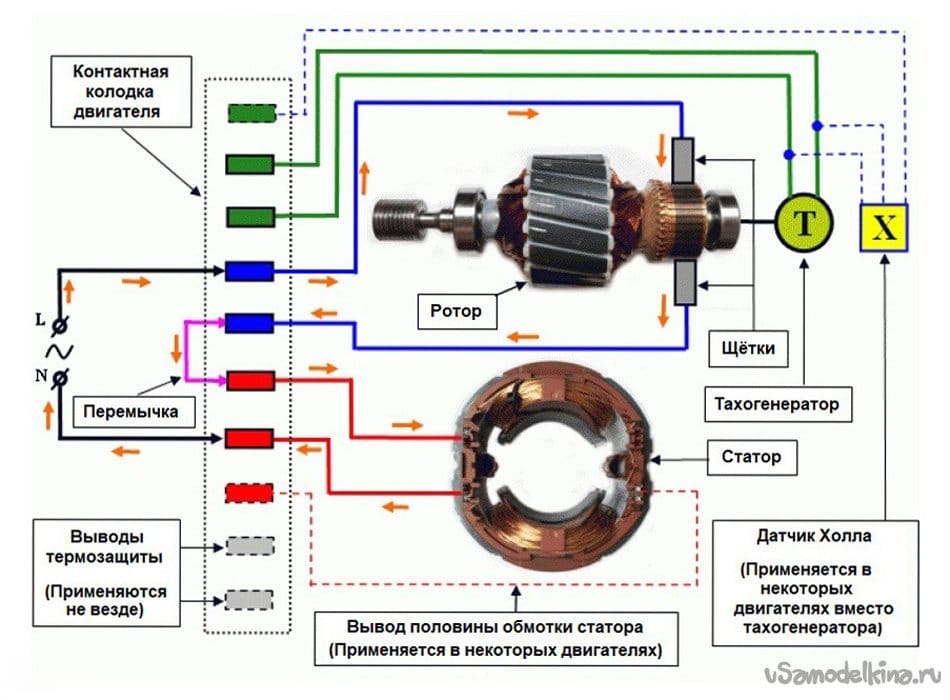
Если к ротору приложить нагрузку, он начнет замедляться и, следовательно, начнет взаимодействовать с магнитным полем статора, и будет создаваться крутящий момент, как показано на рис. 2. нагрузка, приложенная к ротору.
Синхронная скорость зависит от частоты электропитания и конфигурации обмотки статора (количества полюсов). Разница между синхронной скоростью и скоростью ротора известна как скольжение; это выражается в процентах от синхронной скорости и может быть рассчитано по уравнению:
Скольжение = Синхронная скорость – скорость ротора
Синхронная скорость0004
На рис. 3 показана конструкция типичного ротора. Стержни ротора обычно помещаются в пазы стального сердечника для усиления магнитного поля ротора. Стержни ротора обычно наклонены так, что они не совпадают с обмотками статора, что снижает электромагнитный шум и обеспечивает более плавную передачу крутящего момента.
Рисунок 3: Типовая конструкция ротора
Сердечник состоит из стальных пластин, сложенных вместе, в то время как стержни ротора и концевые кольца обычно изготавливаются путем заливки расплавленного алюминия в форму или форму, окружающую пакет пластин ротора. Этот расплавленный алюминий протекает через прорези в блоке ротора, образуя стержни ротора. Между стержнями ротора и стальным сердечником нет изоляции, поскольку индуцированное напряжение низкое.
Рисунок 4. Компоненты асинхронного двигателя переменного тока общего назначения
Однофазные асинхронные двигатели переменного тока потому что его магнитное поле будет просто переключаться между полярностями. В результате требуется дополнительная обмотка для обеспечения прогрессивно вращающегося магнитного поля. Эта вспомогательная обмотка подключена к однофазному источнику питания через конденсатор, так что форма волны ее напряжения может быть не в фазе с формой волны первичной обмотки.
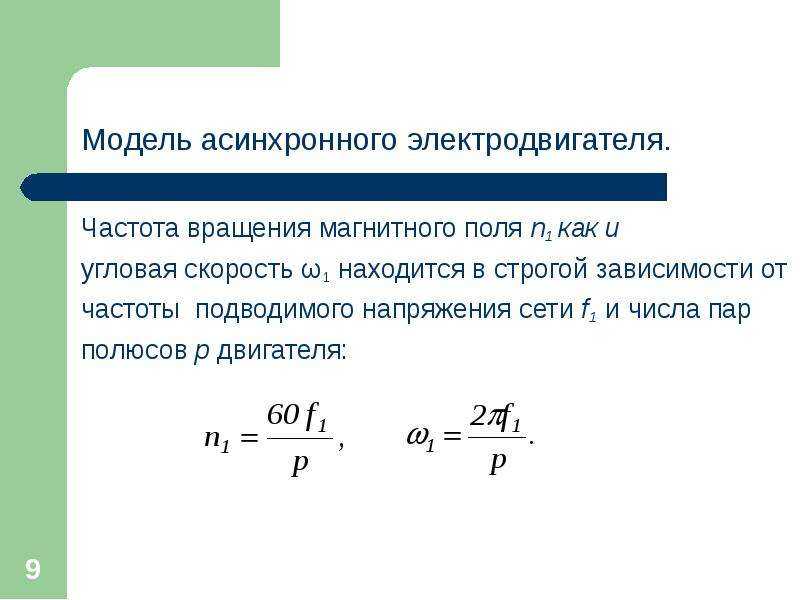
Рисунок 5. Непрерывно вращающееся магнитное поле в однофазном асинхронном двигателе переменного тока, создаваемое вспомогательной обмоткой, подключенной к конденсатору
На рисунке 5 показано, как это создает непрерывно вращающееся магнитное поле, позволяющее индуцировать вращение.
НАЖМИТЕ ЗДЕСЬ, ЧТОБЫ ПРОЧИТАТЬ ЧАСТЬ 3
ncees экзамен 507 количество полюсов
JavaScript отключен. Для лучшего опыта, пожалуйста, включите JavaScript в вашем браузере, прежде чем продолжить.
- Автор темы Спарки Билл PE
- Дата начала
Help Support Professional Engineer & PE Exam Forum:
Спарки Билл PE
Senior, Master, Professional, Licensed Electrical
- #2
Кто-нибудь может попытаться выразить это понятным мне языком? Решение состоит в том, что вы должны просто «предполагать 4, потому что двигатель будет работать немного быстрее, чем номинальная скорость».
Я не работаю в области двигателей, но если двигатель рассчитан на 4 полюса, почему бы на заводской табличке не указать, что у него 1800 об/мин? У меня возникли проблемы с попыткой сохранить это, поэтому я не забываю и не хочу относиться к этому как к типичному «каверзному вопросу NCEES», который не имеет смысла, который им нравится.
Например, пожалуйста, не объясняйте это, если вы понимаете, что говорит NCEES, я прошу объяснить это так, чтобы это имело практический смысл, чтобы я мог извлечь из этого уроки и использовать их как инженер.
акып
Известный член
- #3
СпаркиБилл сказал:
Может ли кто-нибудь попытаться изложить это в терминах, которые я могу понять? Решение состоит в том, что вы должны просто «предполагать 4, потому что двигатель будет работать немного быстрее, чем номинальная скорость».
Я не работаю в области двигателей, но если двигатель рассчитан на 4 полюса, почему бы на заводской табличке не указать, что у него 1800 об/мин? У меня возникли проблемы с попыткой сохранить это, поэтому я не забываю и не хочу относиться к этому как к типичному «каверзному вопросу NCEES», который не имеет смысла, который им нравится.
Например, пожалуйста, не объясняйте это, если вы понимаете, что говорит NCEES, я прошу объяснить это так, чтобы это имело практический смысл, чтобы я мог извлечь из этого урок и использовать его как инженер.
Посмотреть вложение 19654
Нажмите, чтобы развернуть…

Асинхронные двигатели обычно работают на несколько более низкой скорости, чем синхронная (фактическая скорость n < ns). Скорость, указанная на паспортной табличке (1600 об/мин), является фактической скоростью n при полной нагрузке, поэтому синхронная скорость ns должна быть чуть выше 1600 об/мин.
Синхронная скорость ns = 120 x f/p
Количество полюсов в асинхронной машине всегда является четным целым числом (соответствует набору полюсов N и S).
Для p = 2 полюса: ns = 120 x 60 / 2 = 3600 об/мин… Это слишком много.
Для p = 4 полюса: ns = 120 x 60 / 4 = 1800 об/мин. Это почти правильно, так как это лишь немного выше, чем номинальная скорость полной нагрузки 1600 об/мин.
Следовательно, ответ: 4 полюса (4,0 полюса = вариант B).
Если вы продолжите увеличивать количество полюсов, то скорость синхронизации будет слишком низкой (у вас будет n > ns, чего нельзя сказать о асинхронном двигателе, работающем при номинальных значениях двигателя).
Надеюсь, это поможет.
акып
Известный член
- #4
Также, чтобы ответить на ваш вопрос о том, почему на паспортной табличке двигателя не указано 1800 об/мин:
Асинхронным двигателям требуется небольшая разница между фактической скоростью n и синхронной скоростью ns для создания крутящего момента для нагрузки. Если асинхронный двигатель работал на синхронной скорости (n = ns), в результате двигатель не создает никакого момента нагрузки (состояние холостого хода).
Вот почему на заводской табличке двигателя не указана синхронная скорость (в данной задаче 1800 об/мин).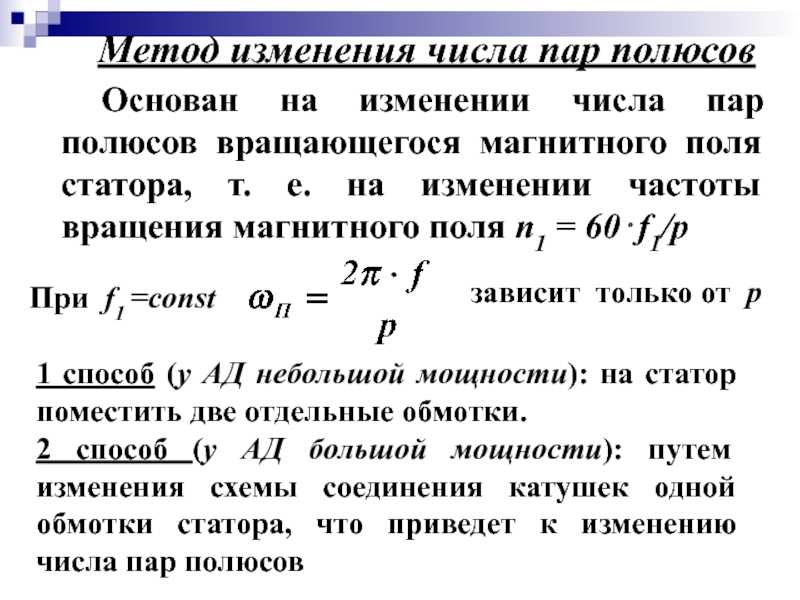 Вместо этого на паспортной табличке указана номинальная скорость n при полной нагрузке, которая лишь немного ниже ns.
Вместо этого на паспортной табличке указана номинальная скорость n при полной нагрузке, которая лишь немного ниже ns.
Дотрацки ЧП
Где мой разум?
- #5
****, @akyip опередил меня. Я собирался сказать, что в основном проблема дает вам фактическую скорость. Приведенная ниже формула позволит вам найти количество полюсов, учитывая большую часть информации в задаче. Однако, если вы подключите 1600 об / мин, количество полюсов составит 4,5, что является хитрым ответом. Типичные значения скольжения составляют около 5–10 %, поэтому синхронная скорость примерно на 5–10 % больше паспортной или фактической скорости.
Также самый большой лакомый кусочек информации для этой проблемы, который устранил бы ответ на хитрость, заключается в том, что двигатель не может иметь дробное количество полюсов.
Последнее редактирование модератором:
акып
Известный член
- #6
Дотраки сказал:
****, @akyip опередил меня.
Я собирался сказать, что в основном проблема дает вам фактическую скорость. Приведенная ниже формула позволит вам найти количество полюсов, учитывая большую часть информации в задаче. Однако, если вы подключите 1600 об / мин, количество полюсов составит 4,5, что является хитрым ответом. Типичные значения скольжения составляют около 5–10 %, поэтому синхронная скорость примерно на 5–10 % больше паспортной или фактической скорости.
Посмотреть вложение 19655
Нажмите, чтобы развернуть…
LOL, мой плохой Дотраки.
Просто пытаюсь помочь. Пытаюсь помочь другим людям на этой доске, чтобы увидеть, насколько хорошо я сложусь, когда наконец сдам экзамен по силе физкультуры.
Еще раз подчеркну, что число полюсов p для асинхронного двигателя всегда является четным целым числом. Это связано с тем, что количество полюсов N равно количеству полюсов S. При этом вы можете легко исключить вариант C (4,5 полюса: это невозможно).
ДЛД ПЭ
нижний отдел кишечника
- #7
СпаркиБилл сказал:
Может ли кто-нибудь попытаться изложить это в терминах, которые я могу понять? Решение состоит в том, что вы должны просто «предполагать 4, потому что двигатель будет работать немного быстрее, чем номинальная скорость».
Я не работаю в области двигателей, но если двигатель рассчитан на 4 полюса, почему бы на заводской табличке не указать, что у него 1800 об/мин? У меня возникли проблемы с попыткой сохранить это, поэтому я не забываю и не хочу относиться к этому как к типичному «каверзному вопросу NCEES», который не имеет смысла, который им нравится.
Например, пожалуйста, не объясняйте это, если вы понимаете, что говорит NCEES, я прошу объяснить это так, чтобы это имело практический смысл, чтобы я мог извлечь из этого урок и использовать его как инженер.
Посмотреть вложение 19654
Нажмите, чтобы развернуть…

Меня тоже опередили! лол, но я добавлю:
У вас никогда не может быть половины полюса, поэтому просто назначайте # полюсов за раз (2, 4, 6 и т. д.), пока не получите что-то, что близко соответствует паспортному рейтингу.
n=120*f/p
2 полюса: n=120*60/2 = 3600 об/мин (далеко)
4 полюса: n=120*60/4 = 1800 об/мин (достаточно близко)
6 полюсов: n=120*60/6 = 1200 об/мин (4 полюса ближе)
Дотрацки ЧП
Где мой разум?
- #8
акып сказал:
LOL, мой плохой Дотраки.
Просто пытаюсь помочь. Пытаюсь помочь другим людям на этой доске, чтобы увидеть, насколько хорошо я сложусь, когда наконец сдам экзамен по силе физкультуры.
Еще раз подчеркну, что число полюсов p для асинхронного двигателя всегда является четным целым числом. Это связано с тем, что количество полюсов N равно количеству полюсов S. При этом вы можете легко исключить вариант C (4,5 полюса: это невозможно).
Нажмите, чтобы развернуть…
Тоже собирался добавить последний пункт. Не беспокойтесь, пока мы все даем правильные отзывы, это хорошая командная работа. Моторы не моя сильная сторона, хотя и не самая худшая тема на физкультуре.
Спарки Билл PE
Senior, Master, Professional, Licensed Electrical
- #9
ДюранДюран сказал:
Меня тоже опередили! лол, но я добавлю:
У вас никогда не может быть половины полюса, поэтому просто назначайте # полюсов за раз (2, 4, 6 и т. д.), пока не получите что-то, что близко соответствует паспортному рейтингу.
n=120*f/p
2 полюса: n=120*60/2 = 3600 об/мин (слишком далеко)
4 полюса: n=120*60/4 = 1800 об/мин (достаточно близко)
6 полюсов: n=120*60/6 = 1200 об/мин (4 полюса ближе)
Нажмите, чтобы развернуть…
Да, это метод, который я использовал. Я знал, что это не может быть 4,5.
Но потом, когда я вычислил 4 полюса, оказалось, что это 1800 об/мин. Я не могу осознать тот факт, что у двигателя будет больше оборотов в минуту, чем указано на его паспортной табличке, и это нормально. Это часть, которую я не понимаю. Я почти выбрал 4, потому что это «ближе», но это не имело смысла, поэтому я выбрал 6. Потому что рейтинг RPM МЕНЬШЕ, чем номинальный рейтинг. Кажется, что если бы двигатель работал быстрее, чем указано на паспортной табличке, это было бы опасно и нереалистично.
Это часть, которую я не понимаю. Я почти выбрал 4, потому что это «ближе», но это не имело смысла, поэтому я выбрал 6. Потому что рейтинг RPM МЕНЬШЕ, чем номинальный рейтинг. Кажется, что если бы двигатель работал быстрее, чем указано на паспортной табличке, это было бы опасно и нереалистично.
акып
Известный член
- #10
Еще забыл добавить.
Скольжение s рассчитывается как:
с = (ns – n) / ns
В основном это разница между синхронной скоростью ns и фактической скоростью ротора n, деленная на синхронную скорость ns. Вы также можете думать об этом как о разнице в скорости, выраженной в процентах от скорости синхронизации ns.
Как упоминал Дотраки, проскальзывание s обычно представляет собой небольшое процентное значение. Я никогда не видел проскальзывания более 10%. Следовательно, фактическая скорость n не должна быть намного ниже скорости синхронизации ns.
Используя приведенную выше формулу скольжения, вы можете рассчитать фактическую скорость ротора как:
n = нс (1 – с)
Аналогично, вы можете рассчитать скорость синхронизации как:
нс = n / (1 – с)
Дотрацки ЧП
Где мой разум?
- #11
СпаркиБилл сказал:
Да, это метод, который я использовал.
Я знал, что это не может быть 4,5.
Но потом, когда я вычислил 4 полюса, оказалось, что это 1800 об/мин. Я не могу осознать тот факт, что у двигателя будет больше оборотов в минуту, чем указано на его паспортной табличке, и это нормально. Это часть, которую я не понимаю. Я почти выбрал 4, потому что это «ближе», но это не имело смысла, поэтому я выбрал 6. Потому что рейтинг RPM МЕНЬШЕ, чем номинальный рейтинг. Кажется, что если бы двигатель работал быстрее, чем указано на паспортной табличке, это было бы опасно и нереалистично.
Нажмите, чтобы развернуть…
Это связано с тем, что ротор и магнитное поле , которое вызывает вращение , вращаются с разными скоростями, обычно скорость вращения ротора медленнее, чем вращение поля для асинхронного двигателя . Ротор – это то, что вырабатывает механическую мощность, так что обычно это паспортная табличка или фактическая скорость.
Последнее редактирование модератором:
Спарки Билл PE
Senior, Master, Professional, Licensed Electrical
- #12
Дотраки сказал:
Это потому, что ротор и статор вращаются с разной скоростью, обычно ротор медленнее, чем статор. Ротор – это то, что вырабатывает механическую мощность, так что обычно это паспортная табличка или фактическая скорость.
Кто-нибудь, поправьте меня, если что не так.
Нажмите, чтобы развернуть…
Вы подразумеваете, что скорость, указанная на паспортной табличке, соответствует скорости статора, а фактическая скорость соответствует скорости ротора?
Я до сих пор не понимаю, потому что по этой методике вы можете купить двигатель с паспортной скоростью 1800 и, черт возьми, работать на 18000 об/мин.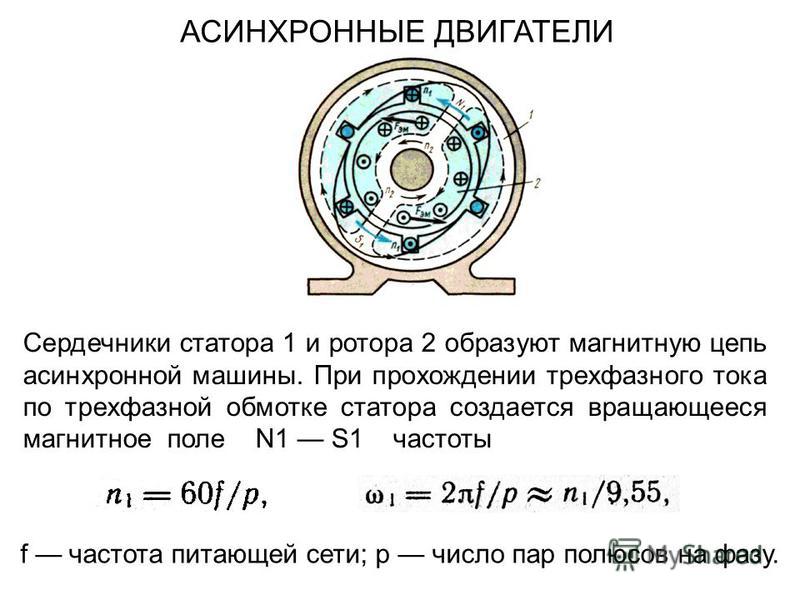
Дотрацки ЧП
Где мой разум?
- №13
СпаркиБилл сказал:
Вы подразумеваете, что скорость на паспортной табличке соответствует скорости статора, а фактическая скорость – скорости ротора?
Я до сих пор не понимаю, потому что по этой методике вы можете купить двигатель с паспортной скоростью 1800 и, черт возьми, работать на 18000 об/мин.
Нажмите, чтобы развернуть…
Извините, что не так. Я не закончил читать свою ссылку, прежде чем я ответил.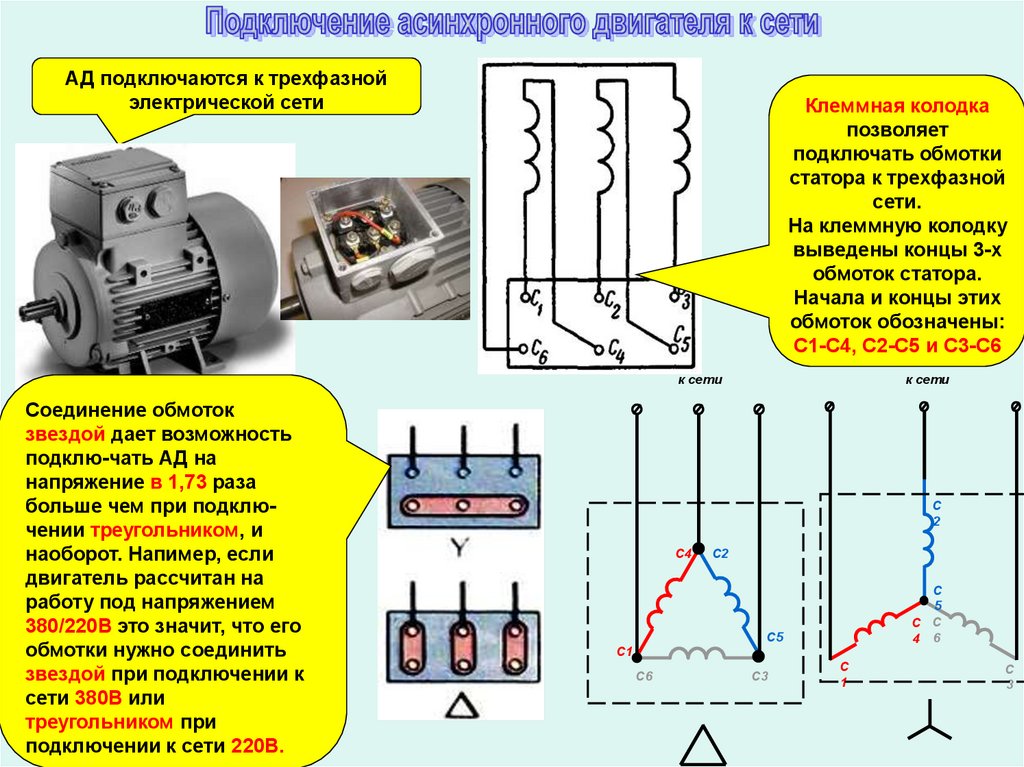
Синхронная скорость — это скорость вращения магнитного поля, создаваемого статором. Магнитное поле заставляет ротор вращаться. Статор является неподвижным элементом.
Синхронные двигатели работают на синхронной скорости. В то время как асинхронные двигатели (например, в задаче) имеют разницу в 5-10% (также известную как скольжение) между синхронной и фактической скоростью.
Спарки Билл PE
Senior, Master, Professional, Licensed Electrical
- №14
Дотраки сказал:
Извините, что был не прав.
Я не закончил читать свою ссылку, прежде чем я ответил.
Синхронная скорость — это скорость вращения магнитного поля, создаваемого статором. Магнитное поле заставляет ротор вращаться. Статор является неподвижным элементом.
Синхронные двигатели работают на синхронной скорости. В то время как асинхронные двигатели (например, в задаче) имеют разницу в 5-10% (также известную как скольжение) между синхронной и фактической скоростью.
Нажмите, чтобы развернуть…
В этом есть смысл, но эта разница в скорости основана на скольжении. Эта проблема дает только сценарий, как если бы вам вручили шильдик без проскальзывания, просто скорость. Таким образом, вы должны принять RPM за чистую монету и угадать, сколько у него полюсов. Я не знаю, почему кто-то может предположить, что количество полюсов делает реальную машину «быстрее» (более высокие обороты).
Спасибо, что написали. Я согласен с тем, что вы только что сказали, и вспомнил, что все время работал над этой проблемой.
спикилси PE
Известный член
- №15
СпаркиБилл сказал:
Вы подразумеваете, что скорость на паспортной табличке соответствует скорости статора, а фактическая скорость – скорости ротора?
Я до сих пор не понимаю, потому что по этой методологии вы можете купить мотор с паспортной скоростью 1800 и, черт возьми, работать на 18000 об/мин.
Нажмите, чтобы развернуть…
Основная идея заключается в том, что скорость синхронизации выше, чем скорость ротора. На паспортной табличке всегда указана скорость вала для этого двигателя, которая всегда будет меньше синхронной скорости из-за всех потерь (трение, ветер и т. д.). поворачивайте точно на синхронной скорости – я, честно говоря, никогда не видел такой низкой скорости, как та, что в задаче. обычно это около 1765 для 4-полюсного двигателя.
На паспортной табличке всегда указана скорость вала для этого двигателя, которая всегда будет меньше синхронной скорости из-за всех потерь (трение, ветер и т. д.). поворачивайте точно на синхронной скорости – я, честно говоря, никогда не видел такой низкой скорости, как та, что в задаче. обычно это около 1765 для 4-полюсного двигателя.
Магнитное поле в статоре всегда вращается с синхронной скоростью (это зависит от частоты вашего источника питания – 60 Гц здесь в состоянии) (Статоры ОСТАЮТСЯ на месте, то есть они не двигаются)
В и асинхронный двигатель, магнитное поле, создаваемое статором, заставляет полюса ротора следовать за магнитным полем статора и ВРАЩАТЬСЯ. Поскольку к ним подключены движущиеся части, такие как нагрузка, подшипники и тому подобное, они подвержены потерям.
Ознакомьтесь с главами книг Уилди и Чепмена об асинхронных двигателях и, возможно, загрузите на YouTube видео с разбором двигателя?
jd5191
Известный член
- №16
Мне очень нравится это видео за объяснение скольжения и почему ротор немного медленнее, чем скорость синхронизации на асинхронном двигателе
вфг42438
Активный член
- №16
акып сказал:
Асинхронные двигатели обычно работают на несколько более низкой скорости, чем синхронная (фактическая скорость n < ns). Скорость, указанная на паспортной табличке (1600 об/мин), является фактической скоростью n при полной нагрузке, поэтому синхронная скорость ns должна быть чуть выше 1600 об/мин.
Синхронная скорость ns = 120 x f/p
Количество полюсов в асинхронной машине всегда является четным целым числом (соответствует набору полюсов N и S).
Для p = 2 полюса: ns = 120 x 60 / 2 = 3600 об/мин… Это слишком много.
Для p = 4 полюса: ns = 120 x 60 / 4 = 1800 об/мин. Это почти правильно, так как это лишь немного выше, чем номинальная скорость полной нагрузки 1600 об/мин.
Следовательно, ответ: 4 полюса (4,0 полюса = вариант B).
Если вы продолжите увеличивать количество полюсов, то скорость синхронизации будет слишком низкой (у вас будет n > ns, чего нельзя сказать о асинхронном двигателе, работающем при номинальных значениях двигателя).
Надеюсь, это поможет.
Нажмите, чтобы развернуть…
Спасибо за это ясное объяснение!!!
У меня была та же проблема, что и у @Sparky Bill PE
Результаты экзамена Power PE (ПРОШЕЛ!)
- Seephuz
- Результаты экзамена PE
- Ответы
- 1
- просмотров
- 1К
Сараали
Сдал экзамен Power PE с первой попытки!!
- Сэм ABJ
- Экзамен физкультуры
- Ответы
- 0
- просмотров
- 727
Sam ABJ
Трехфазный асинхронный двигатель: изменение скольжения обратно пропорционально квадрату изменения напряжения? (англ. Pro Guides Full Exam Question 23)
- akyip
- Силовой экзамен
- Ответы
- 0
- просмотров
- 458
акып
4-й раз очарование
- Токоёси
- Силовой экзамен
- Ответы
- 5
- просмотров
- 2К
RayAl
Помощь с образцом PE Power Exam Illumination Question
- wfg42438
- Электрический осмотр
- Ответы
- 4
- просмотров
- 1К
wfg42438
Делиться:
Фейсбук Твиттер Реддит Пинтерест Тамблер WhatsApp Электронная почта Делиться Связь
PE Petroleum Live Online Instructor
- Последнее: Jessica2S
Инженерные работы / Возможности трудоустройства
Б
Результаты сейсморазведки в Калифорнии, февраль 2023 г.
- Последние: brownthunda
CA-сейсморазведочные экзамены
А
На продажу Продажа Основы сейсморазведки AEI + практические экзамены + рабочая тетрадь Hiner
- Последний: alex_mn
На продажу и в розыск
Основы геодезии (FS) Инструктор
- Последнее: школа физкультуры
Инженерные работы / Возможности трудоустройства
М
Результаты экзамена за февраль
- Последние: MTB_EGR
Экзамен по гражданскому строительству PE
А
Здравствуйте.

