Что такое скольжение асинхронного двигателя
Скольжение – это одна из основных характеристик электродвигателя. Она изменяется в зависимости от режима работы, нагрузки на валу и питающего напряжения. Давайте подробнее разберемся, что такое скольжение электродвигателя, от чего оно зависит и как определяется.
- Что это такое
- Величина скольжения в разных режимах работы
- Способы измерения
Что это такое
Принцип работы трехфазного асинхронного двигателя довольно прост. На обмотку статора подается питающее напряжение, которое создает магнитный поток, в каждой фазе он будет смещен на 120 градусов. При этом суммирующий магнитный поток будет вращающимся.
Обмотка ротора является замкнутым контуром, в ней наводится ЭДС и возникающий магнитный поток придает вращение ротору, в направлении движения магнитного потока статора. Вращающий электромагнитный момент пытается уравнять скорости вращения магнитных полей статора и ротора.
Величина определяющая разность скоростей вращения магнитных полей ротора и статора, называется скольжение. Так как ротор асинхронного двигателя всегда вращается медленнее, чем поле статора — оно обычно меньше единицы. Может измеряться в относительных единицах или процентах.
Так как ротор асинхронного двигателя всегда вращается медленнее, чем поле статора — оно обычно меньше единицы. Может измеряться в относительных единицах или процентах.
Высчитывается она по формуле:
где n1— это частота вращения магнитного поля, n2 – частота вращения магнитного поля ротора.
Скольжение, это важная характеристика, характеризующая нормальную работу асинхронного электродвигателя.
Величина скольжения в разных режимах работы
В режиме холостого хода скольжение близко к нулю и составляет 2-3%, ввиду того, что n1 почти равняется n2. Нулю оно не может быть равным, потому как в этом случае поле статора не пересекает поле ротора, простыми словами, двигатель не вращается и питающее на него напряжение не подается.
Даже в режиме идеального холостого хода, величина скольжения, выраженная в процентах, не будет равной нулю. S может принимать и отрицательные значения, в том случае, когда электродвигатель работает в генераторном режиме.
В генераторном режиме (вращение ротора противоположно направлению поля статора) скольжение ЭД будет в значениях -∞<S<0.
Также существует режим электромагнитного торможения (противовключения ротора), в этом режиме скольжение принимает значение больше единицы, со знаком плюс.
Значение частоты тока в обмотках ротора равно частоте тока сети только в момент пуска. При номинальной нагрузке частота тока будет определяться по формуле:
f2=S*f1,
где f1 – частота тока, подаваемого на обмотки статора, а S — скольжение.
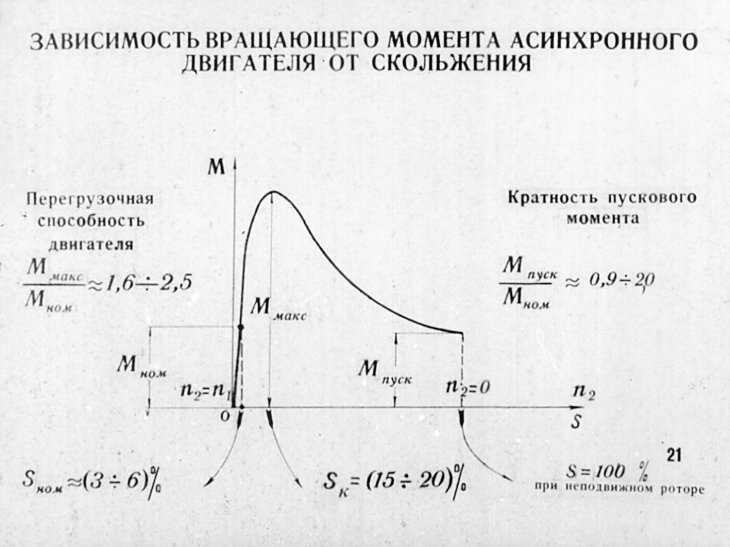
Частота тока ротора прямо пропорциональна его индуктивному сопротивлению. Таким образом, проявляется зависимость тока в роторе от скольжения АД. Вращающий момент электродвигателя зависит от величины S, так как определяется значениями величин магнитного потока, тока, углом сдвига между ЭДС и током ротора.
Поэтому, для детального исследования характеристик АД устанавливается зависимость, изображенная на рисунке выше.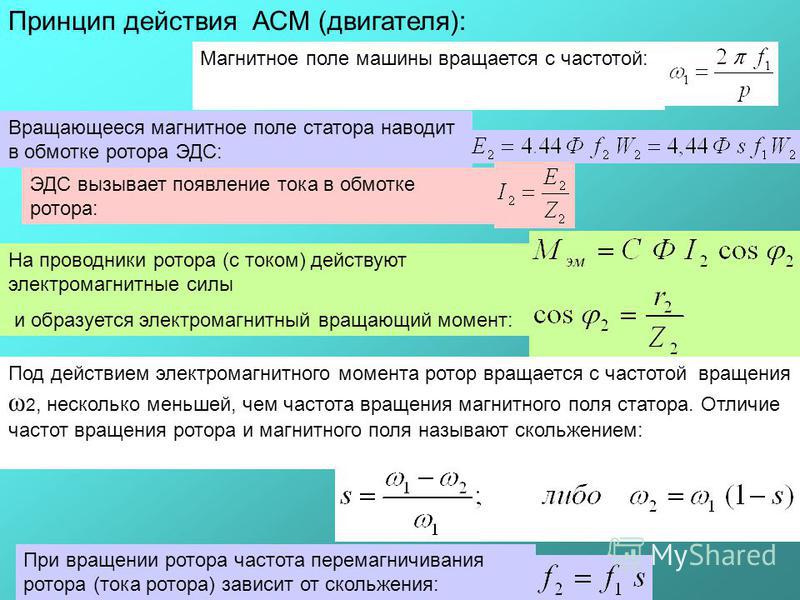 Таким образом, изменение момента (при различных значениях скольжения) в АД с фазным ротором может регулироваться путем ввода сопротивления в цепь обмоток ротора. В электродвигателях с короткозамкнутым ротором момент вращения регулируется или с помощью преобразователей частоты или использованием двигателей с переменными характеристиками.
Таким образом, изменение момента (при различных значениях скольжения) в АД с фазным ротором может регулироваться путем ввода сопротивления в цепь обмоток ротора. В электродвигателях с короткозамкнутым ротором момент вращения регулируется или с помощью преобразователей частоты или использованием двигателей с переменными характеристиками.
При номинальной нагрузке электродвигателя значение скольжения будет в диапазоне 8%-2% (для двигателей малой и средней мощности), номинальное скольжение.
При увеличении нагрузки на валу (момента на валу) будет увеличиваться скольжение, простым языком, магнитное поле ротора будет все сильнее отставать (тормозить) от магнитного поля статора. Увеличение скольжения (S) приведет к пропорциональному увеличению тока ротора, следовательно, пропорционально увеличится момент. Но при этом увеличиваются активные потери в роторе (увеличивается сопротивление), которые уменьшают рост силы тока, поэтому момент увеличивается медленнее, чем скольжение.
При определенной величине скольжения момент достигнет максимального значения, потом начнет снижаться. Величину, при которой момент будет максимальным, называют критической (Sкр).
Величину, при которой момент будет максимальным, называют критической (Sкр).
В графической форме механическую характеристику асинхронного электродвигателя можно выразить с помощью формулы Клосса:
где, Мк — это критический момент, который определяется критическим скольжением электродвигателя.
График строится исходя из характеристик, указанных в паспорте АД. При возникновении вопросов по приводу, в качестве движителя, использующего асинхронный электродвигатель, используется данный график.
Критический момент определяет величину допустимой мгновенной перегрузки электродвигателя. При развитии момента более критического (следовательно, более критического скольжения) происходит, так называемое, опрокидывание электродвигателя и двигатель останавливается. Опрокидывание — один из аварийных режимов.
Способы измерения
Существует несколько способов измерения скольжения асинхронного двигателя. Если частота вращения значительно отличается от синхронной, то ее можно измерить с помощью тахометра или тахогенератора, подключенного на валу ЭД.
Вариант измерения стробоскопическим методом с помощью неоновой лампы подходит при величине скольжения не более 5%. Для этого на валу двигателя либо наносят мелом специальную черту, либо устанавливают специальный стробоскопический диск. Освещают их неоновой лампой, и отсчитывают вращение за определенное время, потом, по специальным формулам производят вычисления. Также возможно использование полноценного стробоскопа, подобно тому что показано ниже.
Также, для измерения величины скольжения всех видов машин подходит способ индуктивной катушки. Катушку лучше всего использовать от реле или контактора постоянного тока, из-за количества витков (там 10-20 тысяч), количество витков должно быть не менее 3000. Катушку с подключенным к ней чувствительным милливольтметром, располагают у конца вала ротора. По отклонениям стрелки прибора (числу колебаний) за определенное время высчитывают по формуле величину скольжения. Помимо этого, у асинхронного двигателя с фазным ротором скольжение можно замерить с помощью магнитоэлектрического амперметра. Амперметр подключается к одной из фаз ротора и по числу отклонений стрелки амперметра производят вычисления (по формуле из способа с индуктивной катушкой).
Помимо этого, у асинхронного двигателя с фазным ротором скольжение можно замерить с помощью магнитоэлектрического амперметра. Амперметр подключается к одной из фаз ротора и по числу отклонений стрелки амперметра производят вычисления (по формуле из способа с индуктивной катушкой).
Вот мы и рассмотрели, что собой представляет скольжение асинхронного двигателя и как его определить. Если остались вопросы, задавайте их в комментариях под статьей!
Материалы по теме:
- Виды испытаний асинхронных двигателей
- Правила определения фазы, нуля и заземления в сети
- Как выбрать мультиметр для дома и работы
Опубликовано 16.09.2019 Обновлено 16.09.2019 Пользователем Александр (администратор)
Особенности определение скольжения асинхронного двигателя классическим методом
Особенности определение скольжения асинхронного двигателя классическим методом- Главная
- Статьи
- Особенности определение скольжения асинхронного двигателя классическим методом
УДК:
621. 313.333.001.5: 621.771.23.016.3.01
313.333.001.5: 621.771.23.016.3.01
Маджидов А. Ш. ассистент кафедры Электрические станции, Национальный исследовательский университет «МЭИ», г. Москва, e-mail: [email protected]
Ключевые слова: асинхронный двигатель, короткозамкнутый ротор, механизм, насос, вентилятор, компрессор, собственные нужды электростанции и подстанции, механическая характеристика, кратность пускового тока, момент, скольжение, идентификация параметров
Скольжение — это одна из основных характеристик асинхронных двигателей, иными словами скольжение асинхронного двигателя — это относительная разность скоростей вращения ротора и магнитного потока, создаваемого обмотками статора двигателя переменного тока. Скольжение может измеряться в относительных единицах и в процентах. Она изменяется в зависимости от режима работы, нагрузки на валу и питающего напряжения. Учитывая важность вышесказанного в данной работе рассмотрена подробность о скольжение асинхронных двигателей и от чего оно зависит и как определяется совершенно простым путем.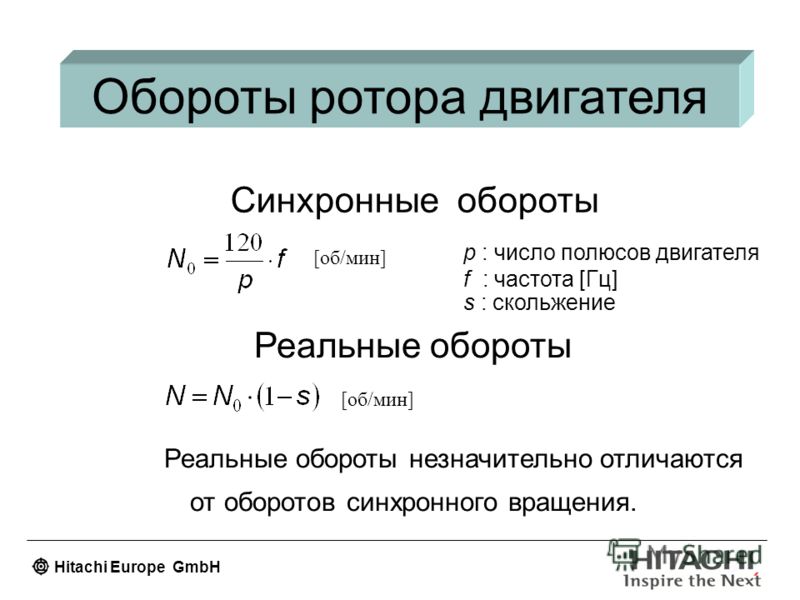
Литература:
1. Маджидов А.Ш. Уравнения асинхронного электродвигателя при переходном процессе / А.Ш. Маджидов // Информационные технологии, энергетика и экономика (электроэнергетика, электротехника и теплоэнергетика, математическое моделирование и информационные технологии в производстве): сборник трудов XVII Международной научно-технической конференции студентов и аспирантов, Смоленск, 16–17 апреля 2020 г. / ФГБОУ ВО «НИУ «МЭИ», филиал в г. Смоленске. – Смоленск: Универсум, 2020. – С. 44–49.
2. Abdullo M. Features of the mathematical equations of asynchronous motors in the transient process / M. Abdullo, K. Nurzat. – April 22–23, 2021. – P. 116–121.
3. Маджидо А.Ш. Учет асинхронного электродвигателя с неизменным скольжением при внезапном трехфазном коротком замыкании / А.Ш. Маджидов, Г.М. Султаналиева, Э.М. Султаналиева // Актуальные проблемы современной науки: взгляд молодых ученых: Материалы Международной научно-практической конференции.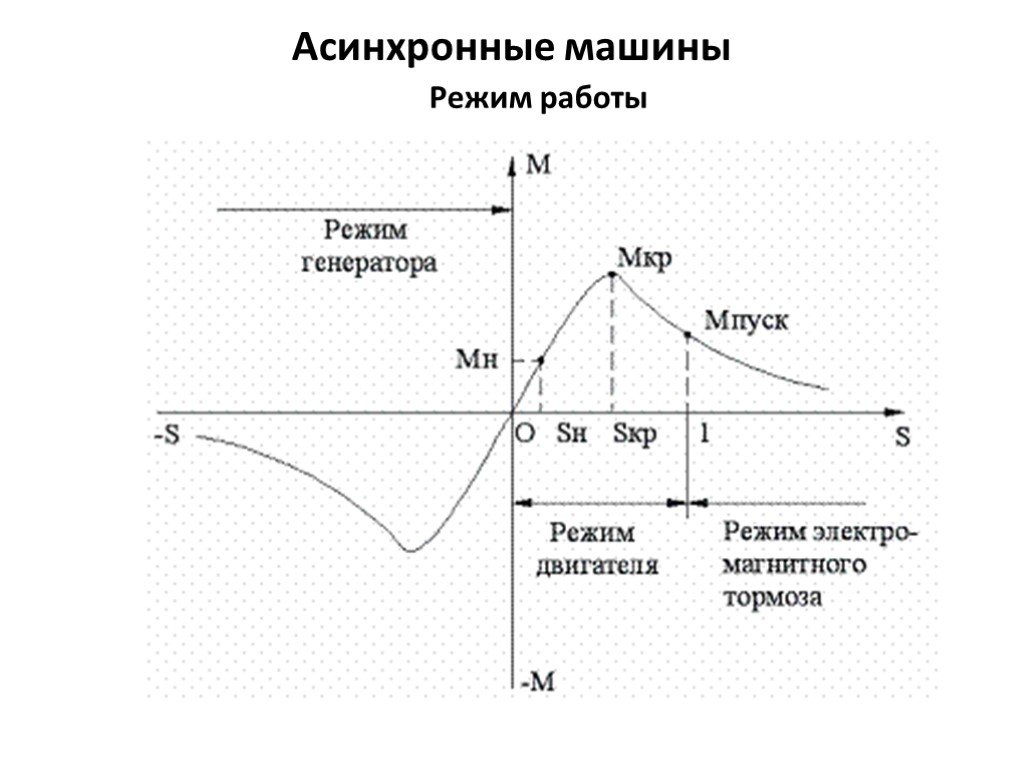 Материалы круглого стола, Грозный, 29–30 мая 2020 г. – Грозный: Чеченский государственный педагогический университет, 2020. – С. 651–657.
Материалы круглого стола, Грозный, 29–30 мая 2020 г. – Грозный: Чеченский государственный педагогический университет, 2020. – С. 651–657.
4. Majidov A. Investigation of the Self-Starting Process of a Low-Power Asynchronous Motor / A. Majidov, A.G. Kayumov, S. Hafizov //Proceedings of the 2021 IEEE Conference of Russian Young Researchers in Electrical and Electronic Engineering, ElConRus 2021, Moscow, January 26–28, 2021. – Moscow, 2021. – P. 1462–1468. – DOI: 10.1109/ElConRus51938.2021.9396181.
5. Маджидов А.Ш. Сравнение методов определения энергоэффективности асинхронных двигателей / А.Ш. Маджидов, А.З. Джавахян // XI Международная интернет-конференция молодых ученых, аспирантов и студентов «Инновационные технологии: теория, инструменты, практика» (InnoTech-2019). – Пермь, 2019. – С. 163–167.
6. Маджидов А.Ш. Особенности выбора асинхронных двигателей с короткозамкнутым ротором по пусковым характеристикам / А.Ш. Маджидов, Н.К. Каныбекова // Информационные технологи, энергетика и экономика (электроэнергетика, электротехника и теплоэнергетика, математическое моделирование и информационные технологии в производстве): сборник трудов XVIII Международной научно-технической конференции студентов и аспирантов: в 3 т.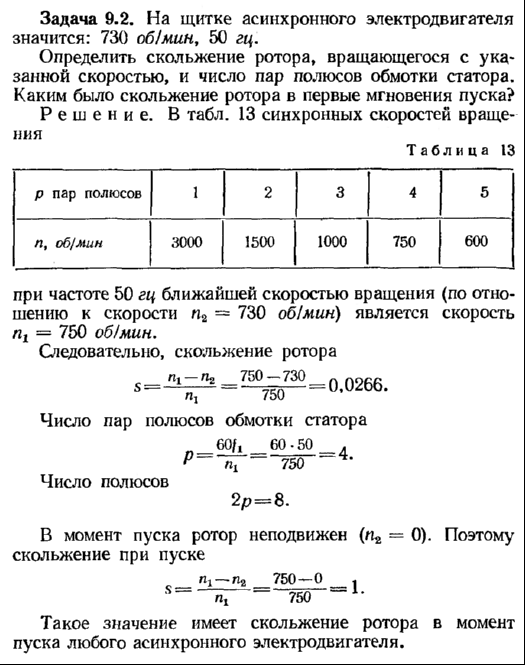 , Смоленск, 22–23 апреля 2021 г. – Смоленск: Универсум, 2021. – С. 206–212.
, Смоленск, 22–23 апреля 2021 г. – Смоленск: Универсум, 2021. – С. 206–212.
7. Маджидов А.Ш. Анализ пусковых характеристик асинхронного двигателя с учетом изменения скорости вращения / А.Ш. Маджидов // Научная инициатива иностранных студентов и аспирантов: сборник докладов I Международной научно-практической конференции. В 2 т., Томск, 27–29 апреля 2021 г. – Томск: Национальный исследовательский Томский политехнический университет, 2021. – С. 178–187.
8. Маджидов А.Ш. Моделирование асинхронного двигателя на основе схемы замещения в программе ETAP / А.Ш. Маджидов // Энергетика, информатика, инновации – 2020: Сборник трудов X Национальной научно-технической конференции с международным участием. В 3 т., Смоленск, 3–4 декабря 2020 г. – Смоленск: Универсум, 2020. – С. 301–306.
9. Majidov A. Comparative Study of Calculation Methods for Short-Circuit Currents in Low-Voltage Networks with Asynchronous Motors / A. Majidov, A.G. Kayumov, N. Kholov // Proceedings of the 2021 IEEE Conference of Russian Young Researchers in Electrical and Electronic Engineering, ElConRus 2021, Moscow, January 26–28, 2021.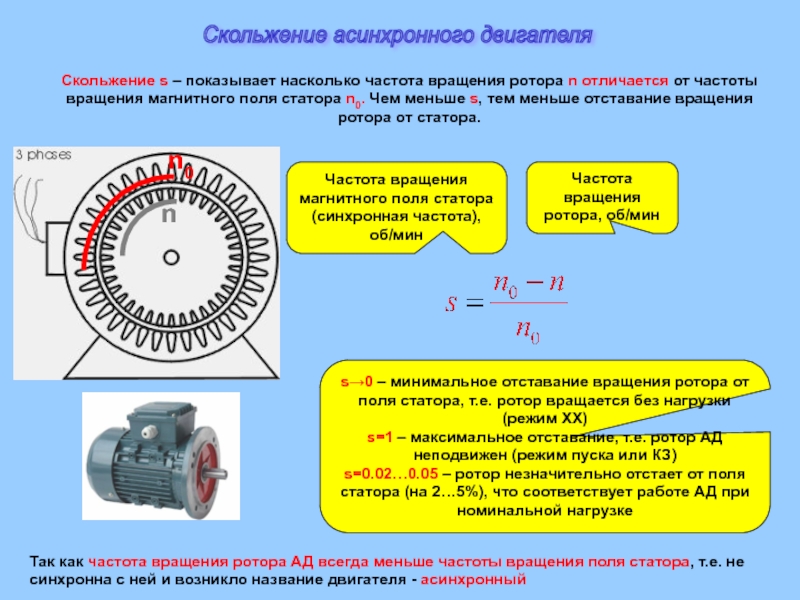
10. Mathematical modeling of asynchronous motors for calculating short-circuit currents / A. Majidov, S. Hafizov, T. Isaev [et al.] // Proceedings of the 3rd 2021 International Youth Conference on Radio Electronics, Electrical and Power Engineering, REEPE 2021: 3, Moscow, March 11–13, 2021. – Moscow, 2021. – P. 9388065. – DOI: 10.1109/REEPE51337.2021.9388065.
Вращение большинства механизмов собственных нужд (СН) электростанций и подстанций (ЭС и ПС) осуществляется с помощью электрических приводов, а именно – асинхронными двигателями (АД) с короткозамкнутым ротором, т. к. эти АД считаются самыми распространенными, которые дают возможность пуска от полного напряжения сети без специальных пусковых устройств. Другое преимущество этих АД – восстанавливать нормальный режим работы после глубоких понижений питающего напряжения, которые считаются самозапуском АД [1, 3, 5].
Для механизмов СН ЭС и ПС важно рассчитать токи и напряжение на выводах АД при различных механических нагрузках.
Уравнениям ЭДС и токов соответствует эквивалентная схема замещения, как показано на рис. 1. Таким образом, сложную магнитную цепь АД можно заменить электрической схемой. Сопротивление r’2 /s можно рассматривать как внешнее сопротивление, включенное в обмотку ротора. Оно является единственным переменным параметром схемы. Изменение этого сопротивления эквивалентно изменению нагрузки на валу АД и приводит к изменению s. Тогда не сложно угадать, что скольжение АД в зависимости от нагрузки меняется незначительно (1–6%) [8]. Чем больше мощность АД, тем меньше его s.
Определение эквивалентного сопротивления этих цепей в основном поддерживается необходимостью определения расчетного скольжения АД, которое в простейшем случае представляет собой функцию механической нагрузки (момент сопротивления вращению рабочей машины), амплитуду, частоту и напряжение на обмотке статора [10].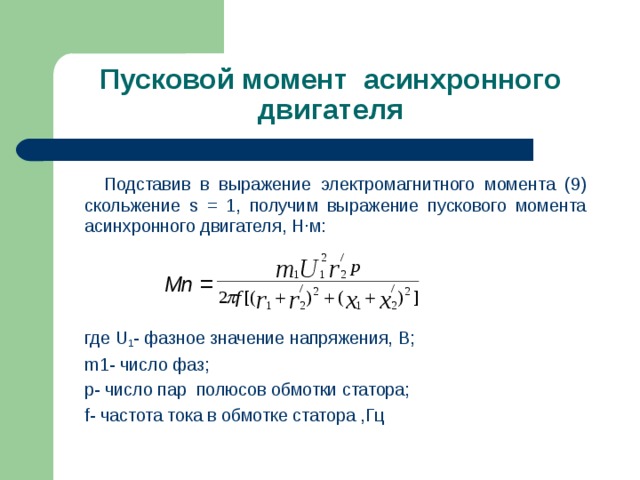 На скольжение могут влиять несимметричность трехфазного напряжения, несинусоидальное напряжение, случайные изменения механической нагрузки [2, 6, 9]. Погрешность определения скольжения 0,001 отн. ед. приводит к значительному увеличению погрешности конечных результатов расчета электрических цепей из-за накопления ошибок в многодвигательном приводе, а также к итерационным расчетам при использовании совместно с методами численных расчетов, при которых накапливается ошибка вычислений.
На скольжение могут влиять несимметричность трехфазного напряжения, несинусоидальное напряжение, случайные изменения механической нагрузки [2, 6, 9]. Погрешность определения скольжения 0,001 отн. ед. приводит к значительному увеличению погрешности конечных результатов расчета электрических цепей из-за накопления ошибок в многодвигательном приводе, а также к итерационным расчетам при использовании совместно с методами численных расчетов, при которых накапливается ошибка вычислений.
Маджидов А. Ш., Особенности определение скольжения асинхронного двигателя классическим методом. Электрооборудование: эксплуатация и ремонт. 2022;1.
Полная версия статьи доступна подписчикам журнала
Для Цитирования:
Маджидов А. Ш., Особенности определение скольжения асинхронного двигателя классическим методом. Электрооборудование: эксплуатация и ремонт. 2022;1.
ФИО
Ваш e-mail
Ваш телефон
Нажимая кнопку “Получить доступ” вы даёте своё согласие обработку своих персональных данных
Ваше имя
Ваша фамилия
Ваш e-mail
Ваш телефон
Придумайте пароль
Пароль еще раз
Запомнить меня
Информируйте меня обо всех новостях и спецпредложениях по почте
На указанный Вами номер телефона был отправлен код подтверждения.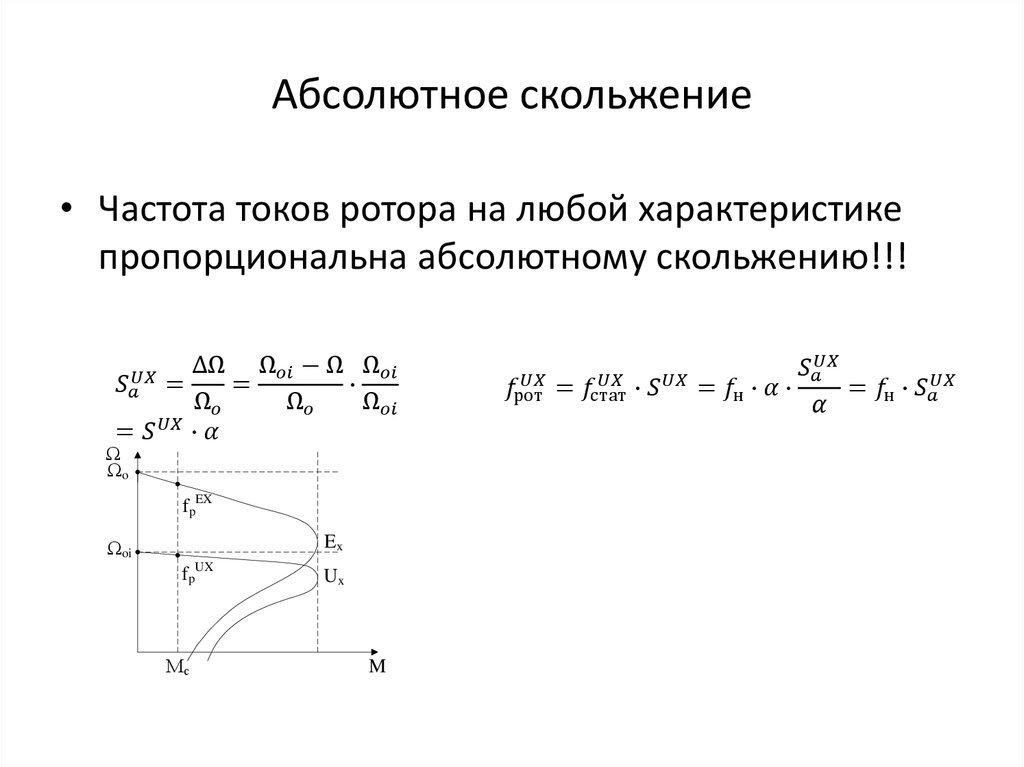
Повторно запросить код можно будет через секунд.
Код подтверждения
На указанный Вами номер телефона был отправлен код подтверждения.Повторно запросить код можно будет через секунд.
Код подтверждения
На указанный Вами номер телефона был отправлен код подтверждения.Повторно запросить код можно будет через секунд.
Код подтверждения
Логин
Пароль
Ваше имя:
Ваш e-mail:
Ваш телефон:
Сообщение:
На сайте используется защита от спама reCAPTCHA и применяются Условия использования и Конфиденциальность Google
Использовать это устройство?
Одновременно использовать один аккаунт разрешено только с одного устройства.
Повторно запросить код можно будет через секунд.
Код подтверждения
×
Мы перевели вас на Русскую версию сайта
You have been redirected to the Russian version
Мы используем куки
Что такое скольжение в асинхронном двигателе?
от администратора
Скольжение в асинхронном двигателе — это относительная скорость между вращающимся магнитным потоком и ротором, выраженная в единицах синхронной скорости. Это безразмерная величина. Значение скольжения в асинхронном двигателе никогда не может быть равно нулю.
Если N s и N r – синхронная скорость вращения магнитного потока и скорость ротора соответственно, то относительная скорость между ними равна (Ns – Nr).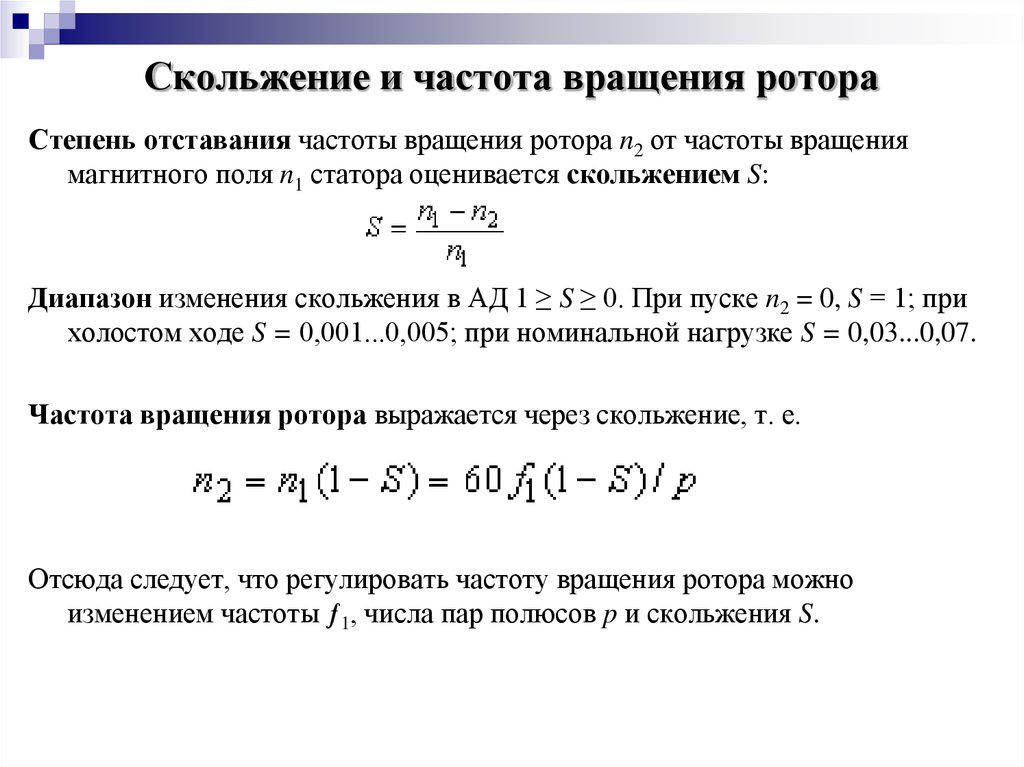 Следовательно, скольжение определяется как
Следовательно, скольжение определяется как
Скольжение (с) = (Ns – Nr) / Ns
Поскольку мы знаем, что скорость ротора не может быть равна синхронной скорости, т.е. Nr < Ns, значение скольжения s всегда меньше единицы. Для асинхронного двигателя 0 При подключении трехфазного источника питания к трехфазной обмотке статора асинхронного двигателя в воздушном зазоре создается вращающееся магнитное поле. Скорость этого вращающегося магнитного поля называется синхронной скоростью. Синхронная скорость определяется количеством полюсов (P) и частотой (f) источника питания. Синхронная скорость равна N = 2f/P об/с (оборот в секунду). Это вращающееся магнитное поле разрезает проводники стационарного ротора, создавая ЭДС. Поскольку цепь ротора короткозамкнута, эта генерируемая ЭДС приводит к возникновению тока ротора. Взаимодействие этого тока ротора с вращающимся магнитным потоком создает крутящий момент, и, следовательно, ротор начинает вращаться в направлении вращающегося магнитного поля по закону Ленца. Нулевое скольжение означает, что скорость ротора равна синхронной скорости. Если ротор вращается с синхронной скоростью в направлении вращающегося магнитного поля, то не будет ни действия срезания потока, ни ЭДС в проводниках ротора, ни тока в проводнике стержня ротора и, следовательно, не будет развития электромагнитного момента. Таким образом, ротор трехфазного асинхронного двигателя никогда не сможет достичь синхронной скорости. Следовательно, в асинхронном двигателе скольжение никогда не равно нулю. Значение скольжения в асинхронных машинах приведено в таблице ниже. Поведение асинхронной машины сильно зависит от величины скольжения. Определение: Скольжение в асинхронном двигателе представляет собой разницу между скоростью основного потока и скоростью вращения ротора. Символ S представляет промах. Она выражается в процентах от синхронной скорости. Значение скольжения при полной нагрузке варьируется от 6% до в случае небольшого двигателя и 2% в случае большого двигателя. Асинхронный двигатель никогда не работает на синхронной скорости. Скорость ротора всегда меньше синхронной скорости. Если скорость ротора равна синхронной скорости, между неподвижными проводниками ротора и основным полем не возникает относительного движения. Тогда в роторе не индуцируется ЭДС и в проводниках ротора возникает нулевой ток. Электромагнитный момент также не индуцируется. Таким образом, скорость ротора всегда поддерживается немного меньше синхронной скорости. Скорость, с которой работает асинхронный двигатель, известна как скорость скольжения . Разница между синхронной скоростью и фактической скоростью вращения ротора называется скоростью скольжения. Другими словами, скорость скольжения показывает относительную скорость ротора относительно скорости поля. Скорость ротора немного меньше синхронной скорости. Таким образом, скорость скольжения выражает скорость ротора относительно поля. Скорость скольжения асинхронного двигателя определяется как Дробная часть синхронной скорости называется Per Unit Slip или Fractional Slip . Скольжение на единицу называется скольжением . Обозначается с. Таким образом, скорость ротора определяется уравнением, показанным ниже: В качестве альтернативы, если Затем Проскальзывание в оборотах в секунду в процентах дается, как показано ниже. Скольжение асинхронного двигателя варьируется от 5 процентов для малых двигателей до 2 процентов для больших двигателей. Скольжение играет важную роль в асинхронном двигателе. Как известно, скорость скольжения – это разница между синхронной и роторной скоростью асинхронного двигателя. ЭДС индуцируется в роторе из-за относительного движения, или, можно сказать, из-за скорости скольжения двигателя. Итак, Ток ротора прямо пропорционален ЭДС индукции. Крутящий момент прямо пропорционален току ротора. Следовательно, Следовательно, крутящий момент прямо пропорционален скольжению. Приведенное выше уравнение показывает, что крутящий момент, создаваемый ротором, прямо пропорционален скольжению асинхронного двигателя. Большое значение скольжения индуцирует ЭДС в роторе. Эта ЭДС создает большой крутящий момент на проводниках ротора. Значение скольжения регулируется с учетом нагрузки на двигатель. Для полной нагрузки требуется высокое значение крутящего момента. Этого можно достичь, увеличив величину скольжения и уменьшив скорость вращения ротора. Скольжение двигателя остается низким, когда асинхронный двигатель работает на холостом ходу.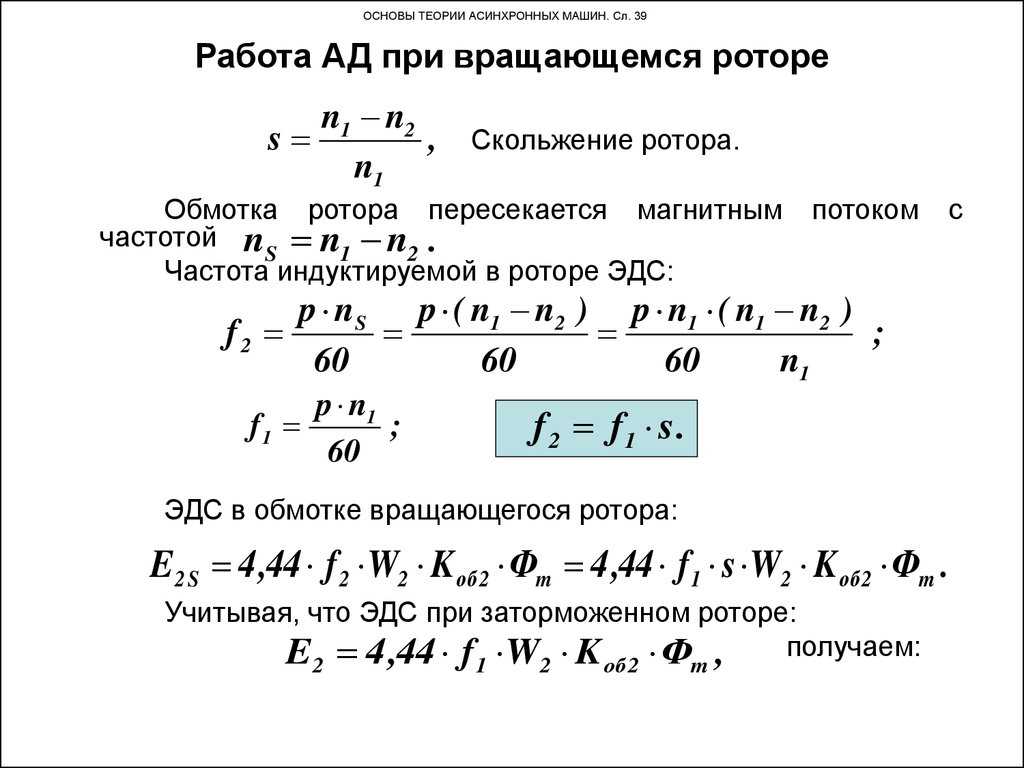 Следовательно, между ними устанавливается относительная скорость, равная (N s – N r ), что вызывает скольжение асинхронного двигателя.
Следовательно, между ними устанавливается относительная скорость, равная (N s – N r ), что вызывает скольжение асинхронного двигателя. Величина проскальзывания (с) Значение с = 0 (нулевое скольжение) Нулевое скольжение означает, что скорость ротора равна синхронно вращающемуся магнитному потоку. 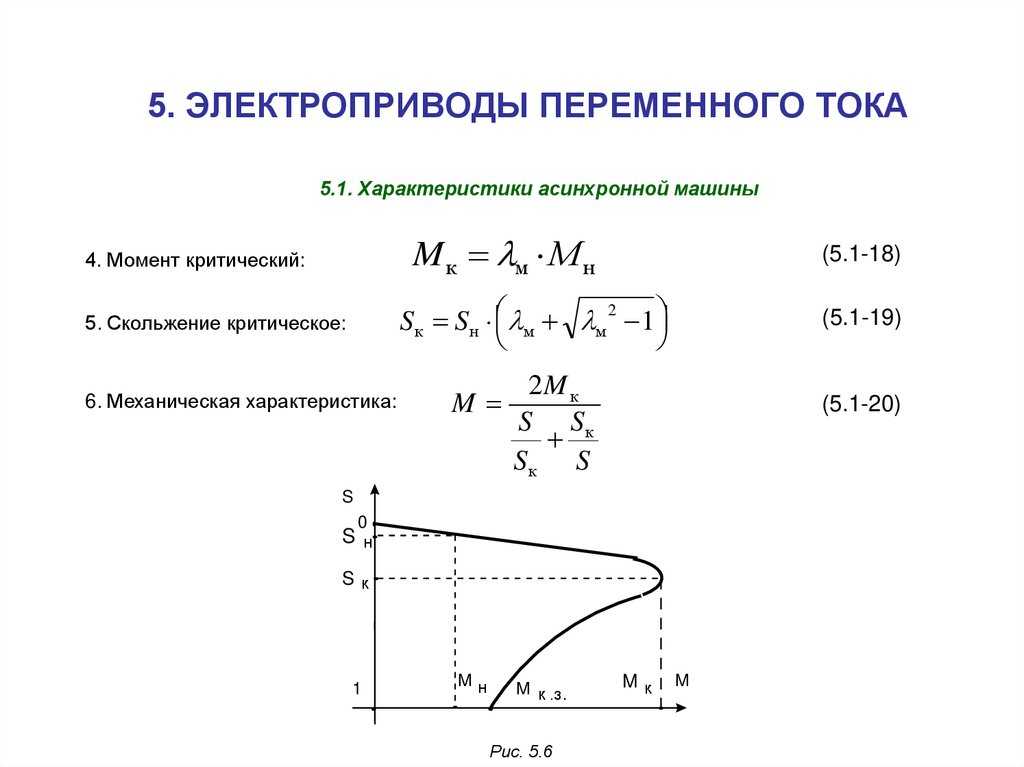 При этом условии не будет никакого относительного движения между катушками ротора и вращающимся магнитным потоком. Таким образом, не будет никакого действия, отсекающего поток катушек ротора. Следовательно, в катушках ротора не будет генерироваться ЭДС для создания тока ротора. Это означает, что электромагнитный момент не будет создаваться. Асинхронный двигатель не будет работать. Поэтому для асинхронного двигателя очень важно иметь положительное значение скольжения. Это причина; скольжение никогда не равно нулю в асинхронном двигателе.
При этом условии не будет никакого относительного движения между катушками ротора и вращающимся магнитным потоком. Таким образом, не будет никакого действия, отсекающего поток катушек ротора. Следовательно, в катушках ротора не будет генерироваться ЭДС для создания тока ротора. Это означает, что электромагнитный момент не будет создаваться. Асинхронный двигатель не будет работать. Поэтому для асинхронного двигателя очень важно иметь положительное значение скольжения. Это причина; скольжение никогда не равно нулю в асинхронном двигателе. с = 1 (скольжение равно 1) Скольжение = 1, означает, что ротор неподвижен. с = отрицательный (отрицательное скольжение) Отрицательное значение скольжения в асинхронном двигателе может быть достигнуто, когда скорость вращения ротора больше, чем синхронно вращающийся магнитный поток. Это возможно только при вращении ротора в направлении вращающегося магнитного потока каким-либо первичным двигателем.  В этом случае машина работает как индукционный генератор. Подробнее см. Характеристики проскальзывания крутящего момента.
В этом случае машина работает как индукционный генератор. Подробнее см. Характеристики проскальзывания крутящего момента. с > 1 (скольжение больше 1) Скольжение больше 1 означает, что ротор вращается в направлении, противоположном направлению вращения магнитного потока. Это означает, что если магнитный поток вращается по часовой стрелке, то ротор вращается против часовой стрелки или наоборот. Следовательно, относительная скорость между ними будет (N s + N r ). При блокировке или торможении асинхронного двигателя достигается скольжение более 1, чтобы быстро привести ротор в состояние покоя. Что такое “Скорость скольжения в асинхронном двигателе”? – его важность
 Математически это записывается как
Математически это записывается как