
что это такое и как найти
Скольжение – это одна из основных характеристик электродвигателя. Она изменяется в зависимости от режима работы, нагрузки на валу и питающего напряжения. Давайте подробнее разберемся, что такое скольжение электродвигателя, от чего оно зависит и как определяется.
- Что это такое
- Величина скольжения в разных режимах работы
- Способы измерения
Что это такое
Принцип работы трехфазного асинхронного двигателя довольно прост. На обмотку статора подается питающее напряжение, которое создает магнитный поток, в каждой фазе он будет смещен на 120 градусов. При этом суммирующий магнитный поток будет вращающимся.
Обмотка ротора является замкнутым контуром, в ней наводится ЭДС и возникающий магнитный поток придает вращение ротору, в направлении движения магнитного потока статора. Вращающий электромагнитный момент пытается уравнять скорости вращения магнитных полей статора и ротора.
Величина определяющая разность скоростей вращения магнитных полей ротора и статора, называется скольжение. Так как ротор асинхронного двигателя всегда вращается медленнее, чем поле статора — оно обычно меньше единицы. Может измеряться в относительных единицах или процентах.
Высчитывается она по формуле:
где n1— это частота вращения магнитного поля, n2 – частота вращения магнитного поля ротора.
Скольжение, это важная характеристика, характеризующая нормальную работу асинхронного электродвигателя.
Величина скольжения в разных режимах работы
В режиме холостого хода скольжение близко к нулю и составляет 2-3%, ввиду того, что n1 почти равняется n2. Нулю оно не может быть равным, потому как в этом случае поле статора не пересекает поле ротора, простыми словами, двигатель не вращается и питающее на него напряжение не подается.
Даже в режиме идеального холостого хода, величина скольжения, выраженная в процентах, не будет равной нулю.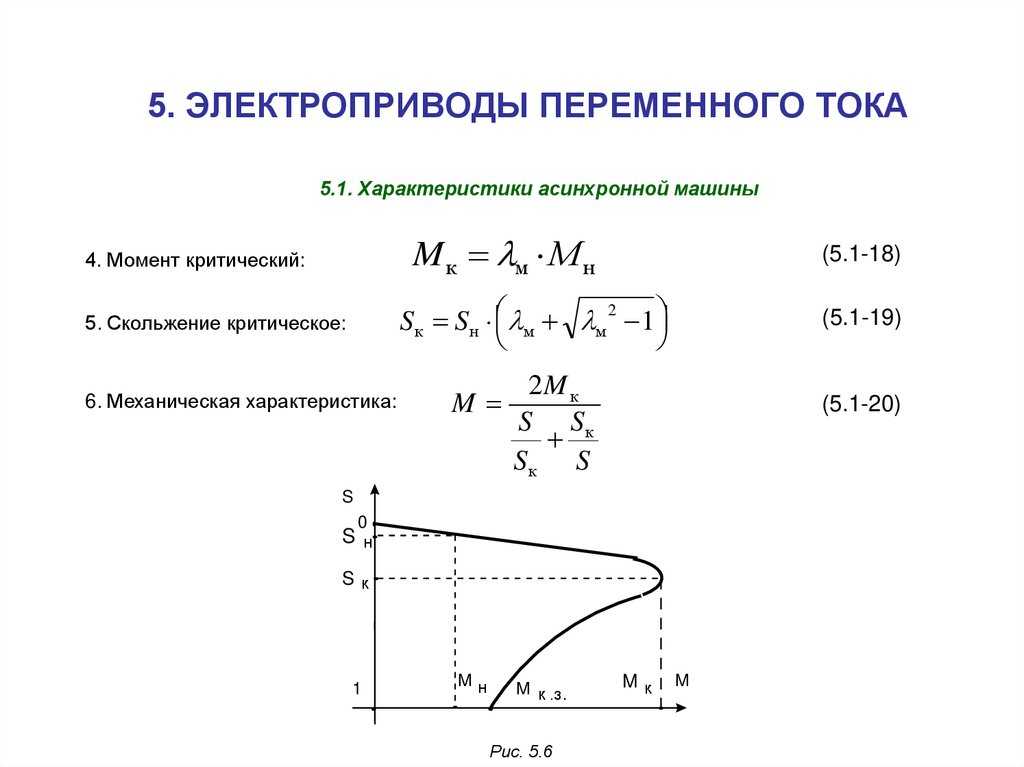 S может принимать и отрицательные значения, в том случае, когда электродвигатель работает в генераторном режиме.
S может принимать и отрицательные значения, в том случае, когда электродвигатель работает в генераторном режиме.
В генераторном режиме (вращение ротора противоположно направлению поля статора) скольжение ЭД будет в значениях -∞<S<0.
Также существует режим электромагнитного торможения (противовключения ротора), в этом режиме скольжение принимает значение больше единицы, со знаком плюс.
Значение частоты тока в обмотках ротора равно частоте тока сети только в момент пуска. При номинальной нагрузке частота тока будет определяться по формуле:
f2=S*f1,
где f1 – частота тока, подаваемого на обмотки статора, а S — скольжение.
Частота тока ротора прямо пропорциональна его индуктивному сопротивлению. Таким образом, проявляется зависимость тока в роторе от скольжения АД. Вращающий момент электродвигателя зависит от величины S, так как определяется значениями величин магнитного потока, тока, углом сдвига между ЭДС и током ротора.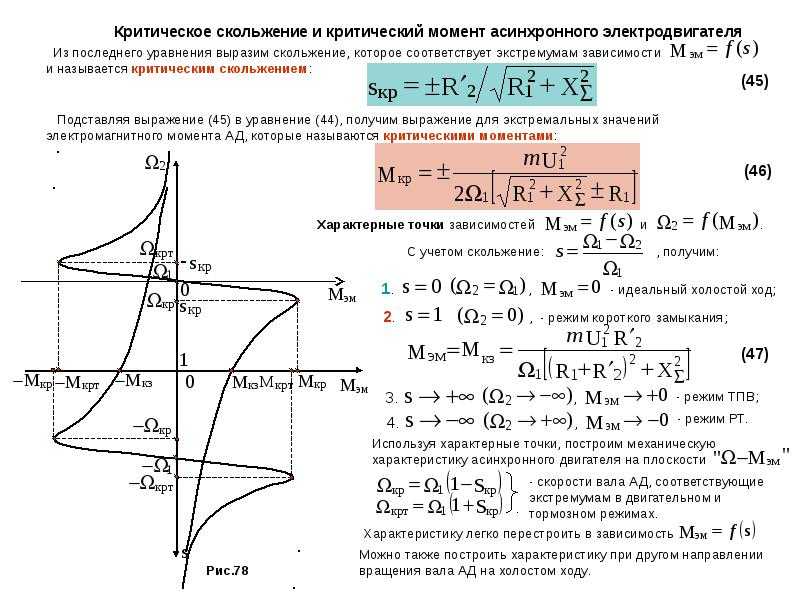
Поэтому, для детального исследования характеристик АД устанавливается зависимость, изображенная на рисунке выше. Таким образом, изменение момента (при различных значениях скольжения) в АД с фазным ротором может регулироваться путем ввода сопротивления в цепь обмоток ротора. В электродвигателях с короткозамкнутым ротором момент вращения регулируется или с помощью преобразователей частоты или использованием двигателей с переменными характеристиками.
При номинальной нагрузке электродвигателя значение скольжения будет в диапазоне 8%-2% (для двигателей малой и средней мощности), номинальное скольжение.
При увеличении нагрузки на валу (момента на валу) будет увеличиваться скольжение, простым языком, магнитное поле ротора будет все сильнее отставать (тормозить) от магнитного поля статора. Увеличение скольжения (S) приведет к пропорциональному увеличению тока ротора, следовательно, пропорционально увеличится момент. Но при этом увеличиваются активные потери в роторе (увеличивается сопротивление), которые уменьшают рост силы тока, поэтому момент увеличивается медленнее, чем скольжение.
При определенной величине скольжения момент достигнет максимального значения, потом начнет снижаться. Величину, при которой момент будет максимальным, называют критической (Sкр).
В графической форме механическую характеристику асинхронного электродвигателя можно выразить с помощью формулы Клосса:
где, Мк — это критический момент, который определяется критическим скольжением электродвигателя.
График строится исходя из характеристик, указанных в паспорте АД. При возникновении вопросов по приводу, в качестве движителя, использующего асинхронный электродвигатель, используется данный график.
Критический момент определяет величину допустимой мгновенной перегрузки электродвигателя. При развитии момента более критического (следовательно, более критического скольжения) происходит, так называемое, опрокидывание электродвигателя и двигатель останавливается. Опрокидывание — один из аварийных режимов.
Способы измерения
Существует несколько способов измерения скольжения асинхронного двигателя.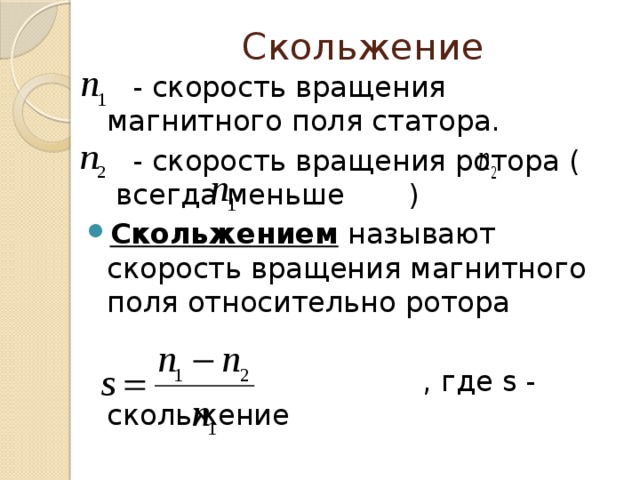 Если частота вращения значительно отличается от синхронной, то ее можно измерить с помощью тахометра или тахогенератора, подключенного на валу ЭД.
Если частота вращения значительно отличается от синхронной, то ее можно измерить с помощью тахометра или тахогенератора, подключенного на валу ЭД.
Вариант измерения стробоскопическим методом с помощью неоновой лампы подходит при величине скольжения не более 5%. Для этого на валу двигателя либо наносят мелом специальную черту, либо устанавливают специальный стробоскопический диск. Освещают их неоновой лампой, и отсчитывают вращение за определенное время, потом, по специальным формулам производят вычисления. Также возможно использование полноценного стробоскопа, подобно тому что показано ниже.
Также, для измерения величины скольжения всех видов машин подходит способ индуктивной катушки. Катушку лучше всего использовать от реле или контактора постоянного тока, из-за количества витков (там 10-20 тысяч), количество витков должно быть не менее 3000. Катушку с подключенным к ней чувствительным милливольтметром, располагают у конца вала ротора. По отклонениям стрелки прибора (числу колебаний) за определенное время высчитывают по формуле величину скольжения. Помимо этого, у асинхронного двигателя с фазным ротором скольжение можно замерить с помощью магнитоэлектрического амперметра. Амперметр подключается к одной из фаз ротора и по числу отклонений стрелки амперметра производят вычисления (по формуле из способа с индуктивной катушкой).
По отклонениям стрелки прибора (числу колебаний) за определенное время высчитывают по формуле величину скольжения. Помимо этого, у асинхронного двигателя с фазным ротором скольжение можно замерить с помощью магнитоэлектрического амперметра. Амперметр подключается к одной из фаз ротора и по числу отклонений стрелки амперметра производят вычисления (по формуле из способа с индуктивной катушкой).
Вот мы и рассмотрели, что собой представляет скольжение асинхронного двигателя и как его определить. Если остались вопросы, задавайте их в комментариях под статьей!
Материалы по теме:
- Виды испытаний асинхронных двигателей
- Правила определения фазы, нуля и заземления в сети
- Как выбрать мультиметр для дома и работы
описание и определение, как измеряется
Электрооборудование
Автор: profelectro
Одним из главных параметров асинхронного электродвигателя является скольжение.
Это переменная величина. Меняться может, исходя из того, в каких режимах работает мотор, величины напряжения, валовой нагрузки.

В статье мы рассмотрим, что собой представляет это явление, как вычисляется, от каких условий зависит.
Что это такое
Принцип действия 3-х фазного электродвигателя (асинхронного) достаточно простой. К статорной обмотке подаётся питание. В результате образуется магнитный поток, смещённый на сто двадцать градусов в фазах. Общий поток, при этом, будет вращаться.
Обмотка представляет собой замкнутый контур, в котором возникает электродвижущая сила. Магнитный поток вращает ротор по направлению статорного потока. Крутящийся электромагнит стремится выровнять вращающие скорости статорного и роторного полей.
Значение, показывающее разницу быстроты вращения статорного и роторного полей и есть скольжение. Поскольку в асинхронном электродвигателе ротор всегда крутится медленней статора, значение, обычно, не превышает единицы.
Измеряется в процентах либо единицах.
Вычисляется по следующей формуле:
Здесь n1 – скорость статора, n2 – скорость ротора.
Скольжение – один из основных параметров, отображающий корректность функционирования асинхронного электродвигателя.
Параметры в различных рабочих режимах
Когда электродвигатель обесточен, вращение не происходит, потому что статорное поле не пересекается с роторным полем. В этом случае величина равна двум или трём процентам, т.е. колеблется около нуля.
Если даже параметр холостого хода идеален, процентное значение нулю равняться не будет. Величина может быть и отрицательной, если двигатель функционирует в режиме генератора. В таком режиме (ротор вращается против статора) значение S будет меньше нуля.
При электромагнитном торможении, величина Sпревышает единицу с положительным знаком. Величина токовой частоты в роторных обмотках равняется токовой частоте сети исключительно при пусковом моменте.
Роторная токовая частота пропорциональна сопротивлению индукции, поэтому роторный ток зависим от скольжения асинхронного двигателя.
Момент вращения АД находится в зависимости от значения S, поскольку определяется величинами токового и магнитного потоков, угловым смещением ЭДС и роторным током.
Для подробного изучения параметров электродвигателя определяется зависимость, показанная на графике вверху.
При разных показателях асинхронном двигателе момент вращения можно корректировать при помощи сопротивления, включённого в цепи роторных обмоток.
Если ротор замкнут «накоротко», вращающий момент изменяется либо частотными преобразователями, либо применением двигателей с изменяющимися параметрами.
При нагрузочном номинале двигателя показатель скольжения находится между двумя и восемью процентами. При добавлении нагрузки скольжение ускоряется, потому что роторное поле начнёт больше отставать от статорного поля.
Ускорение неминуемо приведёт к росту роторного тока и момента вращения. Параллельно с этим возрастает сопротивление, что связано с активными роторными потерями, токовые показатели снижаются, в связи с чем, вращение растёт гораздо медленней скольжения.
Параллельно с этим возрастает сопротивление, что связано с активными роторными потерями, токовые показатели снижаются, в связи с чем, вращение растёт гораздо медленней скольжения.
При определённой скорости скольжения момент вращения достигнет максимума и начнёт замедляться. Максимальное значение является критическим и обозначается Sкр.
В технической документации указываются параметры асинхронного двигателя. По ним строится график, отвечающий на вопросы, связанные с работой асинхронного электрического двигателя, применяемого в качестве привода.
Критический максимум задаёт параметр мгновенного допустимого перегруза двигателя. Когда этот параметр превышается, происходит остановка двигателя (опрокидывание).
Это аварийный режим.
Методы измерений
Есть несколько методов произвести замер скорости скольжения двигателя. Когда скорость существенно разнится с синхронным вращением, её определяют тахометром либо тахогенератором, подключённым к валу асинхронного двигателя.
Метод определения стробоскопом с лампой неонового свет применим при скольжении меньше пяти процентов. На двигательном валу мелом рисуют отметку или ставят стробоскоп.
Подают свет от лампы и считают количество оборотов за определённый промежуток времени и, используя формулы, определяют значение.
Ещё для замера скорости скольжения применяют катушку индуктивности. Оптимальным вариантом будет катушка контактора тока постоянной величины. К ней подключают милливольтметр и помещают в окончание роторного вала.
К ней подключают милливольтметр и помещают в окончание роторного вала.
По количеству колебаний стрелки за определённый промежуток времени с помощью формулы вычисляют скорость вращения.
Кроме того, у двигателя с ротором фазы величину скольжения определяют амперметром (магнитоэлектрическим). Прибор подсоединяют к одной из роторных фаз и по количеству стрелочных колебаний, опять-таки применяя формулу, получают результат.
Мы выяснили, что такое скольжение двигателя, способы его определения. Свои вопросы оставляйте в комментариях.
Что такое скольжение в асинхронном двигателе?
от администратора
Скольжение в асинхронном двигателе — это относительная скорость между вращающимся магнитным потоком и ротором, выраженная в единицах синхронной скорости. Это безразмерная величина. Значение скольжения в асинхронном двигателе никогда не может быть равно нулю.
Это безразмерная величина. Значение скольжения в асинхронном двигателе никогда не может быть равно нулю.
Если N s и N r – синхронная скорость вращения магнитного потока и скорость ротора соответственно, то относительная скорость между ними равна (Ns – Nr). Следовательно, скольжение определяется как
Скольжение (с) = (Ns – Nr) / Ns
Поскольку мы знаем, что скорость ротора не может быть равна синхронной скорости, т.е. Nr < Ns, значение скольжения s всегда меньше единицы. Для асинхронного двигателя 0 При подключении трехфазного источника питания к трехфазной обмотке статора асинхронного двигателя в воздушном зазоре создается вращающееся магнитное поле. Скорость этого вращающегося магнитного поля называется синхронной скоростью. Синхронная скорость определяется количеством полюсов (P) и частотой (f) источника питания. Синхронная скорость равна N = 2f/P об/с (оборот в секунду). Это вращающееся магнитное поле разрезает проводники стационарного ротора, создавая ЭДС. Нулевое скольжение означает, что скорость ротора равна синхронной скорости. Если ротор вращается с синхронной скоростью в направлении вращающегося магнитного поля, то не будет ни действия срезания потока, ни ЭДС в проводниках ротора, ни тока в проводнике стержня ротора и, следовательно, не будет развития электромагнитного момента. Таким образом, ротор трехфазного асинхронного двигателя никогда не сможет достичь синхронной скорости. Следовательно, в асинхронном двигателе скольжение никогда не равно нулю. Значение скольжения в асинхронных машинах приведено в таблице ниже. Поведение асинхронной машины сильно зависит от величины скольжения. Асинхронный двигатель не может работать, если нет скольжения. Что такое скольжение асинхронного двигателя? давайте сначала поймем скольжение асинхронного двигателя. Почему асинхронный двигатель… Включите JavaScript Почему асинхронный двигатель имеет низкий коэффициент мощности при холостом ходе Когда асинхронный двигатель питается от трехфазной сети, создается вращающееся магнитное поле. Скорость вращающегося магнитного поля известна как синхронная скорость (Ns) двигателя. Магнитное поле, создаваемое в двигателе, связывается с проводниками ротора, которые замыкаются концевыми кольцами. Поток, связанный с проводниками ротора, индуцирует напряжение в роторе, и поскольку проводники ротора замыкаются накоротко, ток начинает течь через проводники ротора. В асинхронном двигателе скорость вращения ротора всегда отстает от синхронной скорости вращающегося магнитного поля. Асинхронный двигатель называется асинхронным двигателем, потому что фактическая скорость двигателя всегда меньше синхронной скорости двигателя. Разница между скоростью вращающегося магнитного поля или синхронной скоростью и фактической скоростью ротора или двигателя называется скольжением двигателя. Скольжение можно математически выразить как; с = Ns – N Проскальзывание в процентах, Например: 4-полюсный асинхронный двигатель 50 Гц, 1480 об/мин при полной нагрузке. Подробнее: Индукционный мотор. Крутящий момент возникает при протекании тока в проводнике ротора. Если скольжение равно нулю, в проводнике ротора не будет индуцироваться ЭДС, и, следовательно, в цепи ротора не будет протекать ток. Крутящий момент создается за счет взаимодействия основного потока и тока ротора. Если ток ротора равен нулю, двигатель не будет создавать крутящий момент. При отсутствии скольжения работа двигателя невозможна. Крутящий момент, создаваемый асинхронным двигателем, пропорционален скольжению. Уравнение крутящего момента асинхронного двигателя приведено ниже. Из приведенного выше уравнения крутящего момента асинхронного двигателя видно, что если скольжение равно нулю, крутящий момент будет равен нулю. Когда нагрузка на двигатель увеличивается, скольжение увеличивается, а скорость двигателя немного снижается, поэтому двигатель обеспечивает более высокий крутящий момент для привода нагрузки. Скольжение играет очень важную роль в работе асинхронного двигателя. Скольжение определяет другие параметры асинхронного двигателя. ЭДС, индуцированная в роторе, прямо пропорциональна скольжению. В состоянии покоя скольжение равно единице, а индуцированное ротором напряжение максимально. E 2 (R) ∝ (NS-N) Где, sE 2 – ЭДС ротора/ Фаза в состоянии покоя В состоянии покоя s= (Ns – N)/ Ns = (Ns -0)/Ns = 1 , индуцированная в роторе на стадии. В условиях покоя частота ЭДС ротора равна частоте статора. Частота ЭДС ротора уменьшается, когда двигатель начинает разгоняться, и частота минимальна, когда двигатель достигает номинальной скорости. Математическая связь между частотой ЭДС, индуцированной ротором, и частотой статора приведена ниже. F R = SF S Сопротивление ротора не зависит от скольжения и, следовательно, сопротивление ротора остается постоянным независимо от скорости двигателя. Ч 2 = Постоянная Реактивное сопротивление ротора уменьшается с увеличением скорости двигателя. Пусть реактивное сопротивление ротора равно X 2 . Where, ω = 2π f r Индуцированная ротором частота в рабочем состоянии зависит от скольжения двигателя. В рабочем состоянии, Реактивное сопротивление ротора в рабочем состоянии будет равно; x 2R = 2πs F R L 2 Полное сопротивление/фаза ротора в состоянии покоя приведены ниже. Импеданс/фаза ротора в рабочем состоянии приведены ниже. Где, Импеданс, сопротивление и треугольник реактивного сопротивления цепи ротора приведены ниже. Коэффициент мощности ротора в состоянии покоя указан ниже. В рабочем режиме коэффициент мощности цепи ротора составляет ; Если ЭДС индукции в 4-полюсном статоре имеет частоту 50 Гц, а в роторе 1,5 Гц, то на какой скорости работает двигатель и каково скольжение асинхронного двигателя ? fr = 50 Гц F R = Слист x Частота статора скорость двигателя N = Ns(1 – s) (i) Ns = 120f/p (III) Реактивное сопротивление ротора на стойке = 1,5 Ом / Фаза (iv) Импеданс ротора на фазу при полной нагрузке Ток через ротор в состоянии покоя = ток при пуске Поскольку внешние сопротивления включаются последовательно с ротором, имеющим сопротивление и реактивное сопротивление на фазу R 2 = 5,5 Ом; X 2 = 5,5 Ом соответственно. (I) I 2 = E 2 / √ (R 2 2 +x 2 2 ) (ii) При работе со скольжением 4%  Поскольку цепь ротора короткозамкнута, эта генерируемая ЭДС приводит к возникновению тока ротора. Взаимодействие этого тока ротора с вращающимся магнитным потоком создает крутящий момент, и, следовательно, ротор начинает вращаться в направлении вращающегося магнитного поля по закону Ленца. Следовательно, между ними устанавливается относительная скорость, равная (N
Поскольку цепь ротора короткозамкнута, эта генерируемая ЭДС приводит к возникновению тока ротора. Взаимодействие этого тока ротора с вращающимся магнитным потоком создает крутящий момент, и, следовательно, ротор начинает вращаться в направлении вращающегося магнитного поля по закону Ленца. Следовательно, между ними устанавливается относительная скорость, равная (N 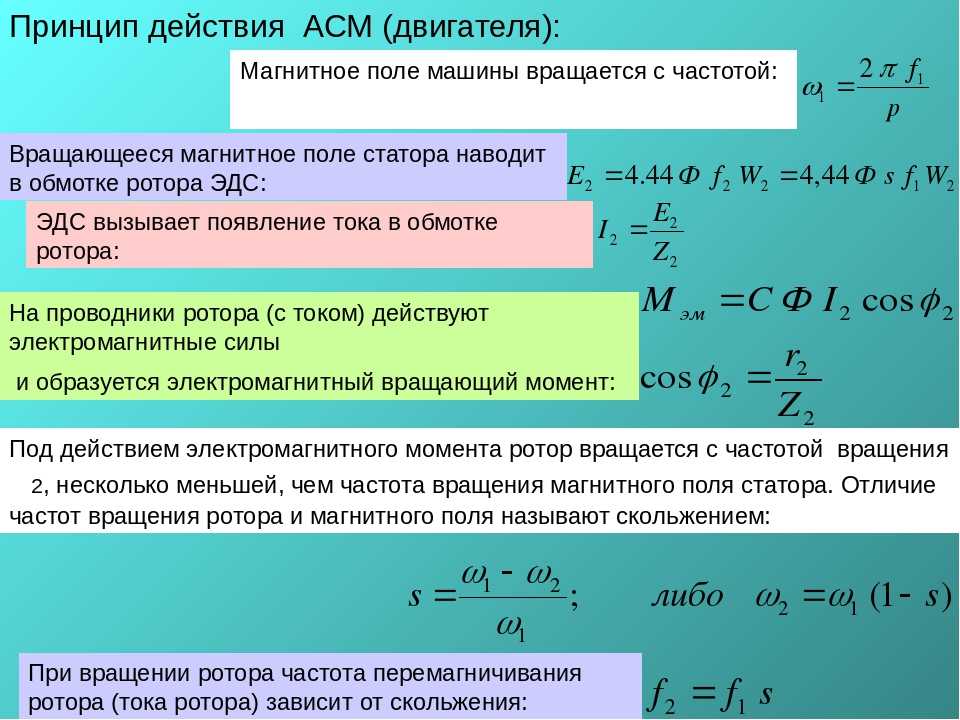
Величина проскальзывания (с) Значение с = 0 (нулевое скольжение) Нулевое скольжение означает, что скорость ротора равна синхронно вращающемуся магнитному потоку. При этом условии не будет никакого относительного движения между катушками ротора и вращающимся магнитным потоком. Таким образом, не будет никакого действия, отсекающего поток катушек ротора. Следовательно, в катушках ротора не будет генерироваться ЭДС для создания тока ротора. Это означает, что электромагнитный момент не будет создаваться. Асинхронный двигатель не будет работать. Поэтому для асинхронного двигателя очень важно иметь положительное значение скольжения. Это причина; скольжение никогда не равно нулю в асинхронном двигателе. 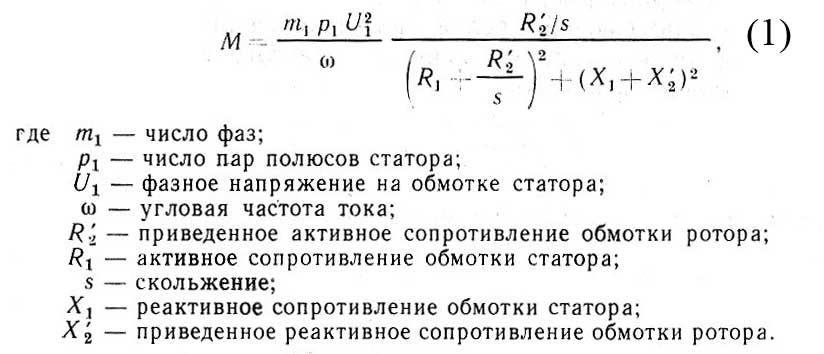
с = 1 (скольжение равно 1) Скольжение = 1, означает, что ротор неподвижен. с = отрицательный (отрицательное скольжение) Отрицательное значение скольжения в асинхронном двигателе может быть достигнуто, когда скорость вращения ротора больше, чем синхронно вращающийся магнитный поток. Это возможно только при вращении ротора в направлении вращающегося магнитного потока каким-либо первичным двигателем. В этом случае машина работает как индукционный генератор. Подробнее см. Характеристики проскальзывания крутящего момента. с > 1 (скольжение больше 1) Скольжение больше 1 означает, что ротор вращается в направлении, противоположном направлению вращения магнитного потока. Это означает, что если магнитный поток вращается по часовой стрелке, то ротор вращается против часовой стрелки или наоборот. Следовательно, относительная скорость между ними будет (N s + N r ).  При блокировке или торможении асинхронного двигателя достигается скольжение более 1, чтобы быстро привести ротор в состояние покоя.
При блокировке или торможении асинхронного двигателя достигается скольжение более 1, чтобы быстро привести ротор в состояние покоя. Какое значение имеет скольжение в асинхронном двигателе?
 Благодаря взаимодействию между магнитным полем и током ротора создается крутящий момент, и ротор начинает вращаться. Пусть скорость вращения ротора равна N.
Благодаря взаимодействию между магнитным полем и током ротора создается крутящий момент, и ротор начинает вращаться. Пусть скорость вращения ротора равна N.
Скольжение в об/мин.
Ns = 120f/P
= 120 x 50/4
Ns = 1500 об/мин
с = Ns -N
= 1500–1480
с = 20 об/мин -1480) /1500] x 100
= [20/1500] x 100
% Slip = 1,33 %  работа асинхронного двигателя?
работа асинхронного двигателя?  На холостом ходу скольжение асинхронного двигателя меньше и увеличивается с увеличением нагрузки на двигатель. Скольжение двигателя саморегулируется в соответствии с требованиями крутящего момента со стороны нагрузки.
На холостом ходу скольжение асинхронного двигателя меньше и увеличивается с увеличением нагрузки на двигатель. Скольжение двигателя саморегулируется в соответствии с требованиями крутящего момента со стороны нагрузки.
∝ S (S = NS-N)
E 2 (R) = S E 2
E 2
поэтому, E 2(r) = s E 2
E 2 (r) = 1 X E 2 = E 2
E 2 (R) = E 2  равно максимальному напряжению ротора (OCV) или равно напряжению холостого хода ротора.
равно максимальному напряжению ротора (OCV) или равно напряжению холостого хода ротора.
Слип. 1
Следовательно, в состоянии покоя
f r =f с  Реактивное сопротивление ротора наименьшее, когда двигатель работает на номинальной скорости. В состоянии покоя скольжение равно единице, а частота ЭДС ротора равна частоте питающей сети.
Реактивное сопротивление ротора наименьшее, когда двигатель работает на номинальной скорости. В состоянии покоя скольжение равно единице, а частота ЭДС ротора равна частоте питающей сети.
X 2 = ω L 2
L 2 = Rotor inductance
Therefore,
X 2 = 2π fr L 2
X 2 = 2π fs L 2 [ As fr =fs, в состоянии покоя]
f r =sf s
= S ( 2π F R L 2 )
x 2R = S. 2 )
2 )
x 2R = S. 2 )
x 2R = S. 2 )
x 2R = S. 2 )
x 2R = S. 2 ) Полное сопротивление ротора
P = 4
N S = 120F/P
= 120 x 50/4
N S = 1500 об/мин
1,5 = S x 50
S = 1,5/50
S = 0,03
= 1500(1 – 0,03)
= 1500 x 0,97
N = 1455 об/мин имеет звездообразный ротор . Скорость двигателя при полной нагрузке составляет 1460 об/мин. Сопротивление ротора и реактивное сопротивление покоя на фазу составляют 0,1 Ом и 1,5 Ом соответственно. Напряжение холостого хода на холостом ходу между контактными кольцами составляет 9 В.0 вольт. Определите (i) процентное скольжение (ii) ЭДС индукции в роторе на фазу (iii) реактивное сопротивление ротора на фазу при полной нагрузке (iv) ток ротора и коэффициент мощности при полной нагрузке.
Скорость двигателя при полной нагрузке составляет 1460 об/мин. Сопротивление ротора и реактивное сопротивление покоя на фазу составляют 0,1 Ом и 1,5 Ом соответственно. Напряжение холостого хода на холостом ходу между контактными кольцами составляет 9 В.0 вольт. Определите (i) процентное скольжение (ii) ЭДС индукции в роторе на фазу (iii) реактивное сопротивление ротора на фазу при полной нагрузке (iv) ток ротора и коэффициент мощности при полной нагрузке.
= 120 x 50/4
= 1500 об/мин;
скольжение = (Ns – N) / Ns
= (1500 – 1460)/ 1500
= 0,0266 Процент
скольжение = 2,66 %
ЭДС ротора при полной нагрузке E r = SE 2
= 0,0266 x 51,96
= 1,382 вольт
Реактирование ротора на фазу .
Z 2 = √ (R 2 2 + SX 2 2 )
= 0,1077 Ом
Ток ротор на фазу = 1,382/0,107 90707 =
Ток ротор на фазу = 1,382/0,107
= ОД
. 12,83 А
12,83 А
Коэффициент мощности при полной нагрузке = R2/Z2
= 0,1/0,1077
= 0,929
= (60 / √ 3) / √ (5,5) 2 + (5,5) 2 )
I 2 = 4,454 ампер
I 2 = SE 2 / √ (R 2 2 + (SX 2 2 ))
= (0,04 x 60 / √ 3) / √ (0,5) 2 + (0,04 x 5) 2 ))
= 2,573 А
