
Асинхронные электродвигатели (страница 2)
1. Определить угловую скорость вращении ротора асинхронного электродвигателя, если обмотка статора четырехполюсная, частота напряжения сети, к которой присоединен электродвигатель, 50 Гц и скольжение ротора равно 3,5%.
Решение:
Частота токов, проходящих в обмотках статора, равна частоте напряжения сети:
Кроме того, известно, что обмотка статора четырехполюсная, т. е. число пар полюсов р = 2.
Скорость вращения магнитного потока, вызываемого трехфазной системой токов, проходящих в обмотках статора, зависит от частоты этих токов и числа пар полюсов обмотки р, так как , откуда число оборотов в минуту вращающегося синхронно магнитного потока
Угловая скорость вращения
Вращение ротора асинхронного электродвигателя возможно лишь при наличии отставания ротора от вращающегося магнитного потока. Величина, характеризующая это отставание, называется скольжением:
где — скорость вращения магнитного потока;
— скорость вращения ротора.
Подставив числовые значения, получим
откуда
Угловая скорость вращения ротора
2. На щитке асинхронного электродвигателя значится: 730 об/мин, 50 Гц.
Определить скольжение ротора, вращающегося с указанной скоростью, и число пар полюсов обмотки статора. Каким было скольжение ротора в первые мгновения пуска?
Решение:
В табл. 13 синхронных скоростей вращения при частоте 50 Гц ближайшей скоростью вращения (по отношению к скорости ) является скорость .
Следовательно, скольжение ротора
Число пар полюсов обмотки статора
Число полюсов
В момент пуска ротор неподвижен . Поэтому скольжение при пуске
Такое значение имеет скольжение ротора в момент пуска любого асинхронного электродвигателя.
Таблица 13
р пар полюсов | 1 | 2 | 3 | 4 | 5 |
n, об/мин | 3000 | 1500 | 1000 | 750 | 600 |
3. В разрыв провода линии, соединяющей контактные кольца ротора асинхронного электродвигателя с трехфазным реостатом, введен магнитоэлектрический амперметр, шкала которого имеет нулевое значение посередине (рис. 80). Разомкнув рубильник, шунтировавший амперметр во время разбега ротора, не поднимая щеток, наблюдали за отклонениями амперметра: оказалось, что за полминуты указательная стрелка прибора совершила 60 полных колебаний.
В разрыв провода линии, соединяющей контактные кольца ротора асинхронного электродвигателя с трехфазным реостатом, введен магнитоэлектрический амперметр, шкала которого имеет нулевое значение посередине (рис. 80). Разомкнув рубильник, шунтировавший амперметр во время разбега ротора, не поднимая щеток, наблюдали за отклонениями амперметра: оказалось, что за полминуты указательная стрелка прибора совершила 60 полных колебаний.
Определить скорость вращения ротора в течение указанного промежутка времени, если обмотка статора шестиполюсная и частота напряжения сети 50 Гц.
Решение:
Полное колебание указательной стрелки соответствует полному периоду тока в обмотке ротора. Если 60 полных колебаний (периодов) произошло за полминуты, то число полных колебаний (периодов) в секунду равно двум. Следовательно,
Магнитный поток в асинхронном электродвигателе вращается относительно ротора со скоростью, равной разности скоростей:
причем частота тока в роторе
Подставив числовые значения, получим
При шестиполюсной обмотке статора и частоте токов в цепи статора скорость вращения магнитного потока
Подставим в выражение для величины
откуда скорость вращения ротора
Скольжение ротора
4. Когда трехфазный асинхронный двигатель с фазным ротором присоединили к сети с линейным напряжением 220 В, напряжение между контактными кольцами при разомкнутой обмотке ротора составило 90 В.
Когда трехфазный асинхронный двигатель с фазным ротором присоединили к сети с линейным напряжением 220 В, напряжение между контактными кольцами при разомкнутой обмотке ротора составило 90 В.
Определить коэффициент трансформации, рассматривая этот электродвигатель как трансформатор в режиме холостого хода, если обмотки статора и ротора соединены звездой.
Решение:
Фазное напряжение на обмотке статора при схеме соединения звездой в раз меньше линейного напряжения. Следовательно,
Фазное напряжение на обмотке ротора
Коэффициент трансформации фазных напряжений
5. Асинхронный электродвигатель с короткозамкнутым ротором характеризуется отношением вращающих моментов соответственно при пуске и при номинальном режиме .
Можно ли осуществить пуск двигателя в случае полной его нагрузки на валу и понижения напряжения в сети на 5 и 10%? К сети присоединен статор.
Решение:
Вращающий момент асинхронного двигателя прямо пропорционален квадрату напряжения в сети:
Следовательно, если напряжение в сети понизится на 5% и составит , то вращающий момент
Отношение
Так как пусковой момент при номинальном напряжении , то при понижении напряжения в сети на 5% пусковой момент
Таким образом, пуск при этих условиях позволит электродвигателю развить вращающий момент больше номинального.
Если напряжение в сети понизится на 10% и составит , то вращающий момент
Пусковой момент при указанном понижении напряжения
Обозначим через долю, которую составляет пусковой вращающий момент от вращающего момента при номинальном напряжении. Тогда для возможности пуска электродвигателя при номинальной нагрузке должно быть выполнено равенство
Поэтому при пуске электродвигателя напряжение сети может составлять от номинального напряжения долю
Таким образом, при заданной кратности пускового момента от номинального понижение напряжения в сети может происходить на и пуск может быть осуществлен при номинальной нагрузке на валу электродвигателя.
6. Асинхронный электродвигатель с короткозамкнутым ротором типа А51-4 имеет следующие номинальные данные: ; кратность вращающих моментов .
Определить вращающие моменты: номинальный , максимальный и пусковой .
Решение:
Номинальный вращающий момент можно определить из основного соотношения
Вращающий момент измерен в и мощность Р — в Вт. При этом
При этом
Если подставить сюда в качестве Р мощность, измеренную в киловаттах, то число будет в 1000 раз меньше.
Таким образом, при тех же единицах измерения вращающего момента получим
Подставим величины номинального режима:
Используя известные кратности моментов, максимальный вращающий момент
пусковой вращающий момент
7. Асинхронный электродвигатель развивает номинальную мощность при номинальной скорости вращения ротора , имея перегрузочную способность 2,1.
Выразить зависимость между вращающим, моментом и скольжением ротора S электродвигателя.
Решение:
Номинальный вращающий момент
Перегрузочная способность l = 2,1 представляет собой отношение максимального вращающего момента к номинальному вращающему моменту . Следовательно,
Номинальному вращающему моменту соответствует и номинальное скольжение
где в качестве подставлена ближайшая большая (по отношению к ) синхронная скорость вращения магнитного потока статора.
Зависимость между вращающим моментом и скольжением ротора s в асинхронном двигателе выражается формулой
где означает критическое скольжение, а и s соответствуют одному и тому же режиму работы. Если в левую часть подставить , то в качестве s следует подставить . Тогда можно определить критическое скольжение , при котором имеет место момент . В этом случае получается квадратное уравнение, из которого берут большее значение корня.
Так как
Разделив на 0,238 левую и правую части равенства и сосредоточив все члены в одной стороне, получим
Корни полученного квадратного уравнения
Далее берется только больший из корней (при положительном знаке перед корнем):
Подставив в формулу, выражающую зависимость между вращающим моментом и скольжением ротора s, численные значения , получим требуемую зависимость
| | Адрес этой страницы (вложенность) в справочнике dpva.ru: главная страница / / Техническая информация / / Оборудование / / Электродвигатели. Электромоторы. / / Синхронные скорости вращения асинхронных электродвигателей в зависимости от частоты (10-100 Гц) и числа полюсов (2-12), Таблица и формула для расчета. Поделиться:
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Если Вы не обнаружили себя в списке поставщиков, заметили ошибку, или у Вас есть дополнительные численные данные для коллег по теме, сообщите , пожалуйста. Вложите в письмо ссылку на страницу с ошибкой, пожалуйста. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Коды баннеров проекта DPVA.ru Начинка: KJR Publisiers Консультации и техническая | Проект является некоммерческим. Информация, представленная на сайте, не является официальной и предоставлена только в целях ознакомления. Владельцы сайта www.dpva.ru не несут никакой ответственности за риски, связанные с использованием информации, полученной с этого интернет-ресурса. Free xml sitemap generator Free xml sitemap generator | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Принцип работы асинхронного двигателя | Заметки электрика
Здравствуйте, уважаемые посетители сайта http://zametkielectrika.ru.
Электрические машины переменного тока нашли широкое распространение, как в сфере промышленности (шаровые мельницы, дробилки, вентиляторы, компрессоры), так и в домашних условиях (сверлильный и наждачный станки, циркулярная пила).
Основная их часть является бесколлекторными машинами, которые в свою очередь разделяются на асинхронные и синхронные.
Асинхронные и синхронные электрические машины обладают одним замечательным свойством под названием обратимость, т.е. они могут работать как в двигательном режиме, так и в генераторном.
Но чтобы дальше перейти к более подробному их рассмотрению и изучению, необходимо знать принцип их работы. Поэтому в сегодняшней статье я расскажу Вам про принцип работы асинхронного двигателя. После прочтения данного материала Вы узнаете про электромагнитные процессы, протекающие в электродвигателях.
После прочтения данного материала Вы узнаете про электромагнитные процессы, протекающие в электродвигателях.
Итак, поехали.
Принцип работы трехфазного асинхронного двигателя
С устройством асинхронного двигателя мы уже знакомились, поэтому повторяться второй раз не будем. Кому интересно, то переходите по ссылочке и читайте.
При подключении асинхронного двигателя в сеть необходимо его обмотки соединить звездой или треугольником. Если вдруг на выводах в клеммнике отсутствует маркировка, то необходимо самостоятельно определить начала и концы обмоток электродвигателя.
При включении обмоток статора асинхронного двигателя в сеть трехфазного переменного напряжения образуется вращающееся магнитное поле статора, которое имеет частоту вращения n1. Частота его вращения определяется по следующей формуле:
- f — частота питающей сети, Гц
- р — число пар полюсов
Это вращающееся магнитное поле статора пронизывает, как обмотку статора, так и обмотку ротора, и индуцирует (наводит) в них ЭДС (Е1 и Е2). В обмотке статора наводится ЭДС самоиндукции (Е1), которая направлена навстречу приложенному напряжению сети и ограничивает величину тока в обмотке статора.
В обмотке статора наводится ЭДС самоиндукции (Е1), которая направлена навстречу приложенному напряжению сети и ограничивает величину тока в обмотке статора.
Как Вы уже знаете, обмотка ротора замкнута накоротко, у электродвигателей с короткозамкнутым ротором, или через сопротивление, у электродвигателей с фазным ротором, поэтому под действием ЭДС ротора (Е2) в ней появляется ток. Так вот взаимодействие индуцируемого тока в обмотке ротора с вращающимся магнитным полем статора создает электромагнитную силу Fэм.
Направление электромагнитной силы Fэм можно легко найти по правилу левой руки.
Правило левой руки для определения направления электромагнитной силы
На рисунке ниже показан принцип работы асинхронного двигателя. Полюса вращающегося магнитного поля статора в определенный период обозначены N1 и S1. Эти полюса в нашем случае вращаются против часовой стрелки. И в другой момент времени они будут находится в другом пространственном положении. Т.е. мы как бы зафиксировали (остановили) время и видим следующую картину.
Т.е. мы как бы зафиксировали (остановили) время и видим следующую картину.
Токи в обмотках статора и ротора изображены в виде крестиков и точек. Поясню. Если стоит крестик, то значит ток в этой обмотке направлен от нас. И наоборот, если точка, то ток в этой обмотке направлен к нам. Пунктирными линиями показаны силовые магнитные линии вращающегося магнитного поля статора.
Устанавливаем ладонь руки так, чтобы силовые магнитные линии входили в нашу ладонь. Вытянутые 4 пальца нужно направить вдоль направления тока в обмотке. Отведенный большой палец покажет нам направление электромагнитной силы Fэм для конкретного проводника с током.
На рисунке показаны только две силы Fэм, которые создаются от проводников ротора с током, направленным от нас (крестик) и к нам (точка). И как мы видим, электромагнитные силы Fэм пытаются повернуть ротор в сторону вращения вращающегося магнитного поля статора.
Поясняющий рисунок для определения электромагнитной силы Fэм для проводника с током, который направлен от нас (крестик).
Поясняющий рисунок для определения электромагнитной силы Fэм для проводника с током, который направлен к нам (точка).
Совокупность этих электромагнитных сил от каждого проводника с током создает общий электромагнитный момент М, который приводит во вращение вал электродвигателя с частотой n.
Эта частота называется, асинхронной.
Отсюда и произошло название асинхронный двигатель. Частота вращения ротора n всегда меньше частоты вращающегося магнитного поля статора n1, т.е. отстает от нее. Для определения величины отставания введен термин «скольжение», который определяется по следующей формуле:
Выразим из этой формулы частоту вращения ротора:
Пример расчета частоты вращения двигателя
Например, у меня есть двигатель типа АИР71А4У2 мощностью 0,55 (кВт):
- число пар полюсов у него равно 4 (2р=4, р=2)
- частота вращения ротора составляет 1360 (об/мин)
Вот его бирка.
Определим частоту вращения поля статора этого двигателя при частоте питающей сети 50 (Гц):
Найдем величину скольжения для этого двигателя:
Кстати, направление движения вращающегося магнитного поля статора, а следовательно, и направление вращения вала электродвигателя, можно изменить. Для этого необходимо поменять местами любые два вывода источника питающего трехфазного напряжения. Об этом я упоминал Вам в статьях про реверс электродвигателя и чередование фаз.
Принцип работы асинхронного двигателя. Выводы
Зная принцип работы асинхронного двигателя, можно сделать вывод, что электрическая энергия преобразуется в механическую энергию вращения вала электродвигателя.
Частота вращения магнитного поля статора, а следовательно и ротора, напрямую зависит от числа пар полюсов и частоты питающей сети. Если число пар полюсов ограничивается типом двигателя (р = 1, 2, 3 и 4), то частоту питающей сети можно изменить в большем диапазоне, например, с помощью частотного преобразователя.
Если в нашем примере частоту питающей сети увеличить всего на 10 (Гц), то частота вращения магнитного поля статора увеличится на 300 (об/мин).
Опыт по установке и монтажу частотных преобразователей у меня есть, но не большой. Несколько лет назад на городском водоканале мы проводили замену двух высоковольтных двигателей насосов холодной воды на низковольтные двигатели с частотными преобразователями. Но это уже отдельная тема для разговора. Сейчас покажу Вам несколько фотографий.
Вот фотография старого высоковольтного двигателя напряжением 6 (кВ).
А это новые двигатели напряжением 400 (В), установленные вместо старых высоковольтных.
Вот шкафы частотных преобразователей. На каждый двигатель свой шкаф. К сожалению, изнутри сфотографировать не успел.
Подписывайтесь на рассылку новостей с моего сайта, чтобы не пропустить самое интересное. В ближайшее время я расскажу Вам про пуск и способы регулирования частоты вращения трехфазных асинхронных двигателей двигателей, схемы их подключения и многое другое.
P.S. На этом статью про принцип работы асинхронного двигателя я завершаю. Спасибо за внимание.
Если статья была Вам полезна, то поделитесь ей со своими друзьями:
Способы регулирования асинхронного двигателя.
Асинхронный двигатель является наиболее массовым электрическим двигателем.
Эти двигатели выпускаются мощностью от 0,1 кВт до нескольких тысяч киловатт и
находят применение во всех отраслях хозяйства. Основным достоинством
асинхронного двигателя является простота его конструкции и невысокая
стоимость. Однако по принципу своего действия асинхронный двигатель в обычной
схеме включения не допускает регулирования скорости его вращения. Особое
внимание следует обратить на то, что во избежание значительных потерь
энергии, а, следовательно, для короткозамкнутых асинхронных двигателей во
избежание перегрева его ротора, двигатель должен работать в длительном режиме
с минимальными значениями скольжения.
Асинхронный двигатель является наиболее массовым электрическим двигателем. Эти двигатели выпускаются мощностью от 0,1 кВт до нескольких тысяч киловатт и находят применение во всех отраслях хозяйства. Основным достоинством асинхронного двигателя является простота его конструкции и невысокая стоимость. Однако по принципу своего действия асинхронный двигатель в обычной схеме включения не допускает регулирования скорости его вращения. Особое внимание следует обратить на то, что во избежание значительных потерь энергии, а, следовательно, для короткозамкнутых асинхронных двигателей во избежание перегрева его ротора, двигатель должен работать в длительном режиме с минимальными значениями скольжения.
Рассмотрим возможные способы регулирования скорости асинхронных двигателей (см. рис.1). Скорость двигателя определяется двумя параметрами: скоростью вращения электромагнитного поля статора ω0 и скольжением s:
Рис. 1. Классификация способов регулирования асинхронных двигателей
Исходя из (1) принципиально возможны два способа регулирования
скорости: регулирование скорости вращения поля статора и регулирование
скольжения при постоянной величине ω0:
1. Классификация способов регулирования асинхронных двигателей
Исходя из (1) принципиально возможны два способа регулирования
скорости: регулирование скорости вращения поля статора и регулирование
скольжения при постоянной величине ω0:
Скорость вращения поля статора определяется двумя параметрами (см.3.3): частотой
напряжения, подводимого к обмоткам статора f1, и числом
пар полюсов двигателя рп. В соответствии с этим возможны
два способа регулирования скорости: изменение частоты питающего напряжения
посредством преобразователей частоты, включаемых в цепь статора двигателя
(частотное регулирование), и путем изменения числа пар полюсов двигателя.
Регулирование скольжения двигателя при постоянной скорости вращения поля
статора для короткозамкнутых асинхронных двигателей возможно путем изменения
величины напряжения статора при постоянной частоте этого напряжения. Для
асинхронных двигателей с фазным ротором, кроме того, возможны еще два
способа: введение в цепь ротора добавочных сопротивлений (реостатное
регулирование) и введение в цепь ротора добавочной регулируемой э.д.с.
посредством преобразователей частоты, включаемых в цепь ротора (асинхронный
вентильный каскад и двигатель двойного питания).
Для
асинхронных двигателей с фазным ротором, кроме того, возможны еще два
способа: введение в цепь ротора добавочных сопротивлений (реостатное
регулирование) и введение в цепь ротора добавочной регулируемой э.д.с.
посредством преобразователей частоты, включаемых в цепь ротора (асинхронный
вентильный каскад и двигатель двойного питания).
В настоящее время благодаря развитию силовой преобразовательной техники созданы и серийно выпускаются различные виды полупроводниковых преобразователей частоты, что определило опережающее развитие и широкое применение частотно-регулируемого асинхронного электропривода. Основными достоинствами этой системы регулируемого электропривода являются:
плавность регулирования и высокая жесткость механических характеристик, что позволяет регулировать скорость в широком диапазоне;
– экономичность регулирования, определяемая тем, что двигатель работает с малыми величинами абсолютного скольжения, и потери в двигателе не превышают номинальных;
Недостатками частотного регулирования являются сложность и высокая стоимость
(особенно для приводов большой мощности) преобразователей частоты и сложность
реализации в большинстве схем режима рекуперативного торможения.
Подробно принципы и схемы частотного регулирования скорости асинхронного двигателя рассмотрены ниже.
Изменение скорости переключением числа пар полюсов асинхронного двигателя позволяет получать несколько (от 2 до 4) значений рабочих скоростей, т.е. плавное регулирование скорости и формирование переходных процессов при этом способе невозможно.
Поэтому данный способ имеет определенные области применения, но не может рассматриваться, как основа для построения систем регулируемого электропривода.
2. Частотное регулирование асинхронных электроприводов:
Принципиальная возможность регулирования угловой скорости асинхронного двигателя
изменением частоты питающего напряжения вытекает из формулы ω = 2π
f1 (1 – s)/p. При регулировании частоты также
возникает необходимость регулирования амплитуды напряжения источника, что
следует из выражения U1 ≈ Е1 =
kФf1. Если при неизменном напряжении изменять частоту,
то поток будет изменяться обратно пропорционально частоте. Так, при уменьшении
частоты поток возрастет, и это приведет к насыщению стали машины и как
следствие к резкому увеличению тока и превышению температуры двигателя; при
увеличении частоты поток будет уменьшаться и как следствие будет уменьшаться
допустимый момент.
Если при неизменном напряжении изменять частоту,
то поток будет изменяться обратно пропорционально частоте. Так, при уменьшении
частоты поток возрастет, и это приведет к насыщению стали машины и как
следствие к резкому увеличению тока и превышению температуры двигателя; при
увеличении частоты поток будет уменьшаться и как следствие будет уменьшаться
допустимый момент.
Для наилучшего использования асинхронного двигателя при регулировании угловой
скорости изменением частоты необходимо регулировать напряжение одновременно в
функции частоты и нагрузки, что реализуемо только в замкнутых системах
электропривода. В разомкнутых системах напряжение регулируется лишь в функции
частоты по некоторому закону, зависящему от вида нагрузки.
Частотное регулирование угловой скорости электроприводов переменного тока с
двигателями с короткозамкнутым ротором находит все большее применение в
различных отраслях техники. Например, в установках текстильной промышленности,
где с помощью одного преобразователя частоты, питающего группу
асинхронных двигателей, находящихся в одинаковых условиях, плавно и
одновременно регулируются их угловые скорости. Примером другой установки с
частотно-регулируемыми асинхронными двигателями с короткозамкнутым ротором
могут служить транспортные рольганги в металлургической промышленности,
некоторые конвейеры и др.
Например, в установках текстильной промышленности,
где с помощью одного преобразователя частоты, питающего группу
асинхронных двигателей, находящихся в одинаковых условиях, плавно и
одновременно регулируются их угловые скорости. Примером другой установки с
частотно-регулируемыми асинхронными двигателями с короткозамкнутым ротором
могут служить транспортные рольганги в металлургической промышленности,
некоторые конвейеры и др.
Частотное регулирование угловой скорости асинхронных двигателей широко применяется в индивидуальных установках, когда требуется получение весьма высоких угловых скоростей (для привода электрошпинделей в металлорежущих станках с частотой вращения до 20 000 об/мин).
Экономические выгоды частотного регулирования особенно существенны для
приводов, работающих в повторно-кратковременном режиме, где имеет место
частое изменение направления вращения с интенсивным торможением.
Для осуществления частотного регулирования угловой скорости находят применение преобразователи, на выходе которых по требуемому соотношению или независимо меняется как частота, так и амплитуда напряжения. Преобразователи частоты можно разделить на электромашинные и вентильные. В свою очередь электромашинные преобразователи могут быть выполнены с промежуточным звеном постоянного тока и непосредственной связью. В последних используют коллекторную машину переменного тока, на вход которой подают переменное напряжение с постоянной частотой и амплитудой, а на выходе ее получают напряжение с регулируемой частотой и амплитудой. Электромашинные преобразователи с непосредственной связью практического применения не получили.
Характеристики асинхронного двигателя ~ Электропривод
К энергетическим характеристикам асинхронного двигателя относятся КПД двигателя(η) коэффициент мощности (cosφ) и скольжение S.
коэффициент полезного действия (η) вычисляется как отношение полезной мощности на валу двигателя Р2 кВт, к активной мощности, потребляемой двигателем из сети Р1 кВт;
η = Р2/ Р1 коэффициент мощности (cos(φ)вычисляется как отношение потребляемой активной мощности Р1 кВт, к полной мощности, потребляемой из сети S1 кВА;
По ГОСТ Р. 51677-2000 асинхронные двигатели общепромышленного назначения делятся на двигатели с нормальным КПД и двигатели с повышенным КПД. У асинхронных двигателей с повышенным КПД, суммарные потери не меньше, чем на 20%, чем у двигателей с нормальным КПД такой же мощности и частоты вращения. Коэффициенты мощностей (cosφ) асинхронных двигателей определены в ГОСТ.Р 51677. Значения КПД и cosφ конкретного асинхронного двигателя можно узнать по каталогу или по шильдику.
Причем КПД и cosφ асинхронного двигателя определяются и нагрузкой машины. В справочниках по электрическим машинам можно увидеть эти зависимости.
Линейный ток двигателя можно определить исходя из номинальной полезной мощность (Р2, кВт), номинального напряжения (UH, В ), КПД (η) и cosφ.
Мощность, потребляемая из сети можно определить из формулы:
Скольжение вычисляется как разницу между номинальной n1 и синхронной nc частотой вращения двигателя, приведенной к номинальной скорости двигателя n1:
Номинальную частоту вращения ротора n1 или скольжение (S, %)можно определить по каталогу двигателя или прочесть на его шильдике.
Механические и пусковые характеристики асинхронного двигателя
Одной из основных характеристик асинхронного двигателя, является механическая характеристика. Механической характеристикой называют зависимость скорости вращения или скольжения от вращающего момента на валу двигателя. Она позволяет сравнить и согласовать механические свойства двигателя и рабочего механизма. Соответственно, зависимость скорости вращения или скольжения от тока статора называют электромеханической характеристикой.
Механическая характеристика асинхронного двигателя определяет зависимость момента на валу двигателя от скольжения, при сохранении неизменного напряжении и частоты питающей сети
Пусковые характеристики определяют величину пускового моментаMп, минимального момента Мmin, максимального или критического момента Мкр. , пускового тока Iп или пусковой мощности Sп или их отношениями. Диаграмма момента, приведенного к номинальному моменту, от скольжения получила название относительной механической характеристики.
, пускового тока Iп или пусковой мощности Sп или их отношениями. Диаграмма момента, приведенного к номинальному моменту, от скольжения получила название относительной механической характеристики.
Номинальный вращающий момент можно определить по формуле:
P2н- номинальная мощность , кВт,
N1н- номинальная частота вращенияю, об/мин.
Пусковые характеристики асинхронного двигателя
Пусковые характеристики асинхронного двигателя регламентирует ГОСТ 28327 ( МЭК 60034 — 12), а их значения приводятся в каталогах. Стандартные асинхронные двигатели могут иметь два исполнения по механическим характеристикам, которые определены в ГОСТ 28327 и МЭК 60034-12:
N – двигатели с нормальный моментом;
Н –двигатели с повышенным моментом.
Двигатели , изготовленные в исполнении N, рассчитывают на два последовательных пуска с остановкой между пусками из холодного состояния или на один пуск из нагретого состояния, после работы при номинальной нагрузке.
Момент сопротивления нагрузки при запуске прямо пропорционален квадрату частоты вращения и равняется номинальному моменту при номинальной частоте вращения, а значение внешнего момента инерции, γ , кг*м2, не должно превышать рассчитанного по формуле
где Р-номинальная мощность двигателя, кВт;
р — число пар полюсов;
При построении характеристики предполагается, что момент сопротивления нагрузки остается постоянным и равен номинальному моменту. Кроме того он не зависит от частоты вращения. Значение же внешнего момента инерции не превышаетт 50% величины, полученной по приведенной выше формуле.
Механические характеристики асинхронных мшин зависят в том числе и от типа ротора, его номинальной мощности, и от числа пар полюсов.
Ввиду того, что разность в значениях момента при соответствующих скольжениях у двигателей с различным числом пар полюсов невелика, и не превышает значения поля допуска на моменты. Различные механические характеристики для разных исполнений асинхронных двигателей показаны на рис
1 — исполнение N; 2 — исполнение Н; 3 — с повышенным скольжением.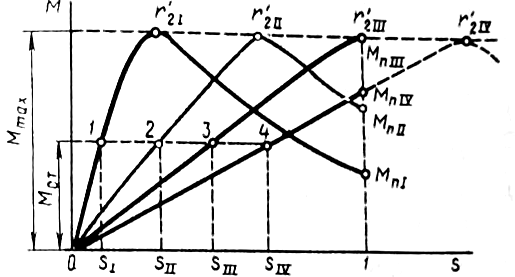 Механические характеристики группы двигателей, одной серии, или ее части обычно укладываются в некоторую зону. По средней линии этой зоны можно составить групповую механическую характеристику. Величина зоны групповой характеристики меньше поля допуска двигателей на моменты.
Механические характеристики группы двигателей, одной серии, или ее части обычно укладываются в некоторую зону. По средней линии этой зоны можно составить групповую механическую характеристику. Величина зоны групповой характеристики меньше поля допуска двигателей на моменты.
Как повысить эффективность электродвигателя – Fluidbusiness
Большинство насосов приводятся в действие с помощью асинхронных электродвигателей, это означает, что двигатели вносят вклад в общую эффективность насосной системы.Данная статья посвящена исследованию ключевых аспектов эффективности электродвигателя, которые находятся под контролем пользователя. 2/3 всей вырабатываемой электроэнергии, потребляются электродвигателями, которые используются в различном оборудовании на промышленных площадках всего мира.
Электродвигатели развиваются на протяжении последних 150 лет. Не смотря на то, что существует большой выбор из различных конструкций двигателей (например синхронные, асинхронные или постоянного тока), наиболее используемым в промышленности на сегодняшний день является асинхронный электродвигатель переменного тока, т. к. является более надежным. Также асинхронный электродвигатель предпочтительнее при использовании частотного преобразователя. Достаточно высокая эффективность в сочетании с простотой изготовления, высокой надежностью и низкой ценой делает его самым широко-применяемым типом двигателя по всему миру.
к. является более надежным. Также асинхронный электродвигатель предпочтительнее при использовании частотного преобразователя. Достаточно высокая эффективность в сочетании с простотой изготовления, высокой надежностью и низкой ценой делает его самым широко-применяемым типом двигателя по всему миру.
Рисунок 1: Асинхронный электродвигатель с короткозамкнутым ротором
На рисунке 1 показана обычная компоновка асинхронного электродвигателя с тремя обмотками статора, которые расположены вокруг сердечника. Обмотка ротора состоит из медных или алюминиевых стержней, торцы которых накоротко замкнуты кольцами. Кольца изолированы от ротора. В подшипниковом узле, как правило, используются шарикоподшипники с консистентной смазкой, за исключением очень больших двигателей. Смазка масляным туманом может значительно увеличить срок службы подшипников. Во всех асинхронных электродвигателях используется трехфазный ток, за исключением самых маленьких промышленных процессов (ниже 2 л.с. ). Для запуска фазных двигателей необходимы другие средства, такие как щетки или конденсаторный пуск (использование конденсатора во время пуска).
). Для запуска фазных двигателей необходимы другие средства, такие как щетки или конденсаторный пуск (использование конденсатора во время пуска).
Проблема эффективности двигателя
При использовании электродвигателя в качестве привода насоса потери энергии и падение давления в результате неэффективности насоса обычно гораздо больше, чем потери энергии связанные с неэффективностью электродвигателя, но они не являются незначительными. Оптимизация эффективности электродвигателя насоса может обеспечить реальную экономию стоимости рабочего цикла на протяжении всего срока службы насоса/электродвигателя. Ключевыми факторами, которые влияют на эффективность асинхронного двигателя являются:
- относительная нагрузка двигателя (негабаритные двигатели находящиеся под нагрузкой)
- скорость вращения (число полюсов)
- размер двигателя (номинальная мощность)
- класс двигателя: обычный КПД в сравнении с энергоэффективностью в с равнении с высоким КПД
Эффективность электродвигателя при частичной загрузке
Как показано на рисунке 2, эффективность асинхронного электродвигателя изменяется вместе с
относительной нагрузкой на электродвигатель по сравнению с номинальной характеристикой. Вплоть до нагрузки в 50% эффективность большинства электродвигателей остается линейной и для некоторых электродвигателей достигает пика у отметки 75%. Электродвигатели могут работать при нагрузке меньше 50% только в течение короткого промежутка времени и не могут эксплуатироваться при нагрузках меньше 20% от номинальных. Таким образом, когда отрегулированные рабочие колеса или насосы возвращаются к своим кривым “напор-подача”, необходимо оценить воздействие относительной нагрузки на электродвигатель.
Вплоть до нагрузки в 50% эффективность большинства электродвигателей остается линейной и для некоторых электродвигателей достигает пика у отметки 75%. Электродвигатели могут работать при нагрузке меньше 50% только в течение короткого промежутка времени и не могут эксплуатироваться при нагрузках меньше 20% от номинальных. Таким образом, когда отрегулированные рабочие колеса или насосы возвращаются к своим кривым “напор-подача”, необходимо оценить воздействие относительной нагрузки на электродвигатель.
Рисунок 2: Эффективность электродвигателя для 100-сильных моторов – Обычные кривые характеристик при нормальном диапазоне нагрузок электродвигателя
Скорость вращения
На рисунке 2 также показано влияние скорости вращения на максимально-достижимую эффективность. 4-х полюсный электродвигатель при номинальных 1800 об/мин выходит на самый высокий КДП, а 2-х полюсный при номинальных 3600 об/мин дает низкую эффективность. Таким образом, хотя насосы с номинальной частотой вращения 3600 об/мин могут быть более эффективными (и иметь низкую закупочную стоимость), чем насосы со скоростью вращения 1800 об/мин, электродвигатели последних могут быть более эффективными, плюс эти насосы, как правило, имеют более низкий NPSHR и энергию всасывания, не говоря уже о более длительном сроке службы. Также следует отметить, что номинальная мощность электродвигателя влияет на его эффективность, большие электродвигатели имеют большую эффективность, чем малые.
Также следует отметить, что номинальная мощность электродвигателя влияет на его эффективность, большие электродвигатели имеют большую эффективность, чем малые.
Скорость вращения асинхронного электродвигателя
Синхронная скорость вращения асинхронного электродвигателя рассчитывается по следующей формуле:
n = 120*f/p
где:
n = скорость вращения в об/мин
f = частота питающей сети (Гц)
p = количество полюсов (min = 2)
Для регулирования частоты вращения электродвигателя без использования внешних механических устройств необходимо регулировать напряжение и частоту подаваемого тока. Некоторые электродвигатели могут быть изготовлены с несколькими обмотками (количество полюсов) для достижения двух или более различных скоростей вращения.
Асинхронные электродвигатели вращаются со скоростью, которая меньше скорости вращения магнитного поля (на 1-3% при полной нагрузке). Разница между фактической и синхронной частотой вращения называется скольжением. Для новых более энергоэффективных электродвигателей скольжение имеет тенденцию уменьшаться в отличие от старых электродвигателей с обычным КПД. Это означает, что при заданной нагрузке энергоэффективные электродвигатели работают немного быстрее.
Для новых более энергоэффективных электродвигателей скольжение имеет тенденцию уменьшаться в отличие от старых электродвигателей с обычным КПД. Это означает, что при заданной нагрузке энергоэффективные электродвигатели работают немного быстрее.
Рисунок 3. Эффективность при полной и частичной загрузке двигателя с низким и высоким КПД
Электродвигатели с высоким КПД
На рисунке 3 изображен пример возможного повышения эффективности, когда старый электродвигатель с обычной эффективностью заменяется новым, имеющим более высокий КПД. Как упоминалось ранее, электродвигатели с высоким КПД работают с меньшим скольжением, что дает некоторое увеличение скорости вращения, а следовательно напор насоса и производительность становятся несколько больше.
Однако, использование электродвигателей с высоким КПД в некоторых (с изменением подачи) процессах будет не оправданно, из-за большей скорости вращения (и напора насоса), до тех пор пока существующие электродвигатели по-прежнему слабо загружены (работающие с низким КПД). Т.к. входная мощность на валу насоса пропорциональна скорости в кубе, простая замена старого электродвигателя новым с высоким КПД не обязательно приведет к снижению потребления энергии.
Т.к. входная мощность на валу насоса пропорциональна скорости в кубе, простая замена старого электродвигателя новым с высоким КПД не обязательно приведет к снижению потребления энергии.
С другой стороны, если немного большая подача и напор для насоса – это хорошо, замена старого
электродвигателя с обычным КПД на новый с высоким КПД может быть оправдана.
Коэффициент мощности электродвигателя
Другая проблема, которая входит в игру с характеристиками асинхронного электродвигателя (которая имеет косвенное влияние на энергопотребление) называется “Коэффициент Мощности“. Некоторые
коммунальные предприятия обязывают клиентов платить дополнительные сборы за низкие значения
коэффициентов мощности. Потери в сети происходят за счет того, что при меньшем коэффициенте
мощности требуется большее количество тока, что приводит к серьезным потерям энергии. Как и КПД,
коэффициент мощности электродвигателя также снижается с уменьшением нагрузки на него практически по линейному закону приблизительно до 50% нагрузки.
Определение коэффициента мощности:
Фазовый сдвиг (задержка) синусоидальной волны тока от синусоиды напряжения, который выбарабывает меньшее количество полезной мощности.
Сдвиг, вызванный необходимым током намагничивания двигателя
PF = Pi/KVA
Где:
KVA = VxIx(3)0.5/1,000
Нижняя формула показывает, как коэффициент мощности влияет на входную мощность трехфазного
электродвигателя (кВт). Обратите внимание, что чем ниже коэффициент мощности (больший сдвиг фазы ток-напряжение VA), тем меньше входная мощность при данном входном токе и напряжении.
Где:
Pi = VxIxPF(3)0.5/1,000
Pi= трехфазный вход кВт
V= среднеквадратичное напряжение (среднее от 3 фаз)
I= среднеквадратичное значение силы тока в амперах (берется от 3 фаз)
PF= коэффициент мощности в виде дроби
Хотя коэффициент мощности не влияет напрямую на КПД электродвигателя, он оказывает влияние на потери в сети, как это упоминалось выше. Однако, есть способы увеличения PF (коэффициента мощности), а именно:
Однако, есть способы увеличения PF (коэффициента мощности), а именно:
- покупка электродвигателей с изначально высоким PF
- не покупайте слишком большие электродвигатели (коэффициент мощности падает вместе с уменьшением
- нагрузки на электродвигатель)
- установка компенсирующих конденсаторов параллельно с обмотками электродвигателя
- увеличить полную загрузку коэффициента мощности до 95% (Max)
- преобразование в привод с частотным регулированием
Пусковые конденсаторы электродвигателей являются одним из наиболее поппулярных способов увеличения коэффициента мощности и имеют следующий список преимуществ:
- увеличение PF
- меньшение реактивного тока от электрооборудования через кабели и пускатели электродвигателейменьшее тепловыделение и потери мощности кВт
- По мере уменьшения нагрузки на электродвигатель растет возможность экономии, а PF
- падает ниже 60%-70%.
 (возможная экономия 10%)
(возможная экономия 10%) - Уменьшение сборов за коэффициент мощности
- Увеличение общей производительности системы
- Интеллектуальная система управления электродвигателем
- Частотно-регулируемый электропривод
Более высокое напряжение
Другим способом повышения КПД электродвигателя является повышение рабочего напряжения. Чем выше напряжение, тем ниже ток и, тем самым будут ниже потери в сети. Однако, высокое напряжение приведет к увеличению цены частотно-регулируемого привода и сделает работу более опасной.
Выводы
Таким образом, когда вы пытаетесь сократить энергопотребление насосных систем не забывайте о
КДП электродвигателя и факторах, перечисленных выше, которые на него влияют.
Формулы асинхронного двигателя с расчетами
Электродвигатели – это машины, которые преобразуют входную электрическую энергию в механическую энергию. Все двигатели состоят из статора (неподвижная часть) и ротора (вращающаяся часть). Поскольку двигатель работает от электричества, с его работой связаны различные свойства. Такие свойства включают количество полюсов, скорость, частоту, скольжение, пусковой ток и номинальную мощность в лошадиных силах. Ранее мы публиковали книгу по двигателям переменного тока, в которой кратко объясняются все эти свойства, этот пост посвящен формулам асинхронных двигателей и примерам расчетов.
Поскольку двигатель работает от электричества, с его работой связаны различные свойства. Такие свойства включают количество полюсов, скорость, частоту, скольжение, пусковой ток и номинальную мощность в лошадиных силах. Ранее мы публиковали книгу по двигателям переменного тока, в которой кратко объясняются все эти свойства, этот пост посвящен формулам асинхронных двигателей и примерам расчетов.
Синхронная скорость, частота и полюса
Синхронная скорость, частота и количество полюсов асинхронного двигателя связаны формулой:
η синхронизация = (120 * f e ) / P
η синхрон = синхронная скорость
f e = частота системы
P = количество полюсов, установленных в машине
Расчет: Найдите синхронную скорость 4-полюсного асинхронного двигателя, который работает с частотой 60 Гц.
Решение: η синхр. = 120 * 60/4 = 1800 об / мин
Мотор скольжения
Пробуксовку двигателя можно найти по формуле:
с = (η синхр. -η м ) / η синхр. * 100
η синхронизация = Скорость магнитного поля
η м = Механическая частота вращения вала
Расчет: Скорость ротора 4-полюсного асинхронного двигателя при 50 Гц составляет 1200 об / мин. Рассчитайте его скольжение.
Решение: Скорость ротора = η м = 1200 об / мин
Где η синхрон = 120 * 50/4 = 1500 об / мин
с = (1500 – 1200) / 1500 * 100 = 20
Крутящий момент, мощность и скорость
τ инд = P / ω м
τ ind = индуцированный крутящий момент в Нм
P = мощность в кВт
ω м = Скорость в об / мин
Расчет: Найдите крутящий момент на валу асинхронного двигателя мощностью 10 л.с., скорость ротора которого составляет 1500 об / мин.
Решение: τ ind = (10 л.с. * 746 кВт / л.с.) / (1500 об / мин * 2 π рад / об * 1 мин / 60 с) = 47,49 Нм
Калькулятор пускового тока
I L = S начало / (√3 * V T ),
, где S start = Номинальная мощность двигателя * Кодовый коэффициент
(Кодовый коэффициент – это число, которое зарезервировано для класса). Например, все двигатели класса A имеют фиксированный кодовый коэффициент, который в приведенном выше уравнении следует умножить на номинальную мощность.)
В T = Номинальное напряжение
Расчет: Найдите пусковой ток 10 л.с., трехфазный двигатель 220 В класса А.
Решение: Максимальное значение кВА / л.с. для двигателя класса A составляет 3,15 (кодовый коэффициент).
S start = 10 л.с. * 3,15 = 31,5 кВА
I L = 31,5 кВА / (√3 * 220) = 82,66 А
Возможно, вы захотите узнать: Как рассчитать ток от HP
Регулировка скорости трехфазного асинхронного двигателя
Как контролировать скорость трехфазного асинхронного двигателя? Метод управления скоростью включает: изменение количества полюсов, регулировку напряжения статора, преобразование частоты статора, каскадное регулирование скорости, регулирование скорости двойной подачи, гидравлическую муфту, электромагнитную скользящую муфту и т. Д.
Фактическая скорость трехфазного асинхронного двигателя определяется как n = n с (1 – с) = 120f / p (1-с). Из формулы видно, что скорость 3-х фазного асинхронного двигателя может быть изменена путем изменения количества полюсов асинхронного двигателя «p», скольжения «s» и частоты источника питания «f».
Управление скоростью с изменением полюсов
Как показано в формуле n s = 120f / p, он может изменять синхронную скорость двигателя, изменяя количество полюсов обмотки статора, тем самым изменяя скорость вращения.Управление скоростью с переключением полюсов в основном используется в асинхронных двигателях с короткозамкнутым ротором. Регулятор скорости с переключением полюсов имеет следующие характеристики:
- Более жесткие механические характеристики и хорошая стабильность
- Отсутствие потерь от скольжения и высокая эффективность
- Простая разводка, удобное управление и невысокая цена
Но нельзя добиться плавного регулирования скорости этим методом из-за большой разницы в уклонах. Следовательно, его можно использовать с управлением скоростью по напряжению и электромагнитной скользящей муфтой, чтобы получить более эффективную характеристику плавного регулирования скорости.
Этот метод подходит для производственного оборудования без плавного регулирования скорости, такого как металлорежущие станки, подъемники, краны, вентиляторы, водяные насосы и т. Д.
Регулирование скорости скольжения
1. Изменение напряжения статора
Крутящий момент асинхронного двигателя пропорционален квадрату напряжения статора. То есть изменение напряжения статора может изменить механическую характеристику и крутящий момент двигателя.
Этот метод не подходит для обычного двигателя с короткозамкнутым ротором, потому что его сопротивление ротора очень мало, и ток будет быстро расти на низкой скорости.
Но его можно использовать для асинхронного двигателя с обмоткой за счет последовательного сопротивления или частого варистора в цепи ротора для уменьшения нагрева двигателя.
2. Изменение сопротивления ротора
Этот метод регулирования скорости применим только к обмоточному двигателю. В цепи ротора асинхронного двигателя, включенного последовательно с сопротивлением, когда нагрузка фиксирована, чем больше сопротивление, тем ниже скорость двигателя. Чем меньше сопротивление, тем выше скорость.
Этот метод прост, легок в управлении и требует небольших начальных вложений.Но сила скольжения расходуется на сопротивление за счет нагрева. Он также обладает мягкими механическими характеристиками.
3. Каскадное регулирование скорости
В настоящее время каскадное регулирование скорости использует схему каскадного управления инвертора SCR и имеет следующие преимущества: усиление механических характеристик, низкое падение напряжения выпрямителя, небольшое пространство, отсутствие вращающейся части, низкий уровень шума, простой поддержание. Это один из методов управления скоростью двигателя с фазным сердечником.
У него тоже есть недостаток. То есть контур ротора оборудован реактором для фильтра, поэтому коэффициент мощности низкий.
Регулирование скорости с переменной частотой
Согласно формуле скорости асинхронного двигателя, можно видеть, что, когда скольжение s остается постоянным, скорость двигателя n в основном пропорциональна частоте сети f . Следовательно, изменение частоты f может плавно регулировать скорость асинхронного двигателя. Изменение частоты источника питания – это экономичный метод регулирования скорости, а также один из самых популярных способов управления скоростью асинхронного двигателя.
Регулирование скорости с переменной частотой вращения – это способ изменить частоту сети статора двигателя, а затем изменить его синхронную скорость. Основным оборудованием системы регулирования скорости вращения является преобразователь частоты или частотно-регулируемый привод (VFD), который обеспечивает преобразование частоты для источника питания. Частотно-регулируемые приводы можно разделить на две категории: частотно-регулируемые приводы переменного-постоянного-переменного тока и частотно-регулируемые приводы переменного-переменного тока.
В настоящее время широко используемые частотно-регулируемые приводы используют цифровую технологию и имеют тенденцию к миниатюризации, высокой надежности и точности.В приложениях он не только обеспечивает значительную экономию энергии, но и обладает следующими характеристиками:
- Высокоточное плавное регулирование скорости.
- Полная функция защиты, способная отображать неисправность путем самодиагностики и простое обслуживание.
- Запуск напрямую от сети, с большим пусковым моментом и малым пусковым током, которые уменьшают воздействие на электросеть и оборудование, и с функцией подъемного момента, что позволяет экономить устройство плавного пуска.
- Высокий коэффициент мощности и за исключением устройства компенсации конденсатора.
– синхронная скорость
Синхронная скорость для электрического асинхронного двигателя определяется
- частотой источника питания и
- числом полюсов в обмотке двигателя.
Синхронная скорость может быть рассчитана как:
n = f (2 / p) 60 (1)
, где
n = скорость вращения вала (об / мин, об / мин)
f = частота электропитания (Гц, циклов / с, 1 / с)
p = количество полюсов
Примечание – an асинхронный двигатель никогда не достигнет своей синхронной скорости.Если бы это было так – ротор казался бы неподвижным по отношению к вращающемуся полю статора, поскольку он вращался бы с той же скоростью. При отсутствии относительного движения между статором и полем ротора в двигателе не будет индуцироваться напряжение. Поэтому скорость асинхронного двигателя ограничена скоростью ниже синхронной, а разница между синхронной скоростью и фактической скоростью называется скольжением.
Пример – синхронная скорость двухполюсного электродвигателя
На двухполюсный двигатель подается мощность с частотой 50 Гц (1 / с) .Скорость вращения может быть рассчитана как
n = (50 1 / с) (2/2) (60 с / мин)
= 3000 об / мин (1 / мин)
Синхронный скорость вращения при разных частотах и количестве полюсов
| Скорость вращения вала – n – (об / мин, об / мин) | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Частота – f – (Гц) | Количество полюса – p – | ||||||||||
| 2 | 4 | 6 | 8 | 10 | 12 | ||||||
| 10 | 600 | 300 200 | 150 100 | ||||||||
| 20 | 1200 | 600 | 400 | 300 | 240 | 200 | |||||
| 30 | 1800 | 900 | 600 | 90 303450360 | 300 | ||||||
| 40 | 2400 | 1200 | 800 | 600 | 480 | 400 | |||||
50 4 1500 304| 750 | 600 | 500 | | ||||||||
| 60 2) | 3600 | 1800 | 1200 | 900 | 720 | 600 | |||||
| 900 | |||||||||||
| 100 | 6000 | 3000 | 2000 | 1500 | 1200 | 1000 | |||||
- Двигатели, рассчитанные на 50 Гц, чаще всего встречаются за пределами U.S
- Двигатели, рассчитанные на 60 Гц, наиболее распространены в США.
Частотно-регулируемый привод
Частотно-регулируемый привод модулирует скорость электродвигателя путем изменения частоты источника питания.
Методы регулирования скорости асинхронного двигателя
Асинхронный двигатель практически представляет собой двигатель с постоянной скоростью, что означает, что для всего диапазона нагрузки изменение скорости двигателя довольно мало. Скорость параллельного двигателя постоянного тока можно очень легко изменять с хорошим КПД, но в случае асинхронных двигателей снижение скорости сопровождается соответствующей потерей эффективности и низким коэффициентом мощности.Поскольку асинхронные двигатели широко используются, регулирование их скорости может потребоваться во многих приложениях. Различные методы управления скоростью асинхронного двигателя объясняются ниже.Регулировка скорости асинхронного двигателя со стороны статора
1. Путем изменения подаваемого напряжения:
Из уравнения крутящего момента асинхронного двигателя,Сопротивление ротора R 2 постоянно, и если скольжение s мало, то (sX 2 ) 2 настолько мало, что им можно пренебречь.Следовательно, T ∝ sE 2 2 , где E 2 – ЭДС, индуцированная ротором, а E 2 ∝ V
Таким образом, T ∝ sV 2 , что означает, что если подаваемое напряжение уменьшается, развиваемый крутящий момент уменьшается. Следовательно, для обеспечения того же момента нагрузки скольжение увеличивается с уменьшением напряжения, и, следовательно, скорость уменьшается. Этот метод самый простой и дешевый, но до сих пор используется редко, потому что
- требуется большое изменение напряжения питания для относительно небольшого изменения скорости.
- большое изменение напряжения питания приведет к большому изменению плотности потока, следовательно, это нарушит магнитные условия двигателя.
2. Изменяя применяемую частоту
Синхронная скорость вращающегося магнитного поля асинхронного двигателя равна,. где f = частота питания и P = количество полюсов статора.
Следовательно, синхронная скорость изменяется с изменением частоты питания. Фактическая скорость асинхронного двигателя определяется как N = Ns (1 – s) .Однако этот метод не получил широкого распространения. Его можно использовать там, где асинхронный двигатель питается от специального генератора (так что частоту можно легко изменять, изменяя скорость первичного двигателя). Кроме того, при более низкой частоте ток двигателя может стать слишком большим из-за пониженного реактивного сопротивления. А если частота превышает номинальное значение, максимальный развиваемый крутящий момент падает, а скорость увеличивается.
3. Постоянное регулирование U / F асинхронного двигателя
Это самый популярный метод управления скоростью асинхронного двигателя.Как и в описанном выше методе, если частота питания снижается при сохранении номинального напряжения питания, поток в воздушном зазоре стремится к насыщению. Это вызовет чрезмерный ток статора и искажение магнитной волны статора. Следовательно, напряжение статора также должно быть уменьшено пропорционально частоте, чтобы поддерживать постоянный магнитный поток в воздушном зазоре. Величина потока статора пропорциональна отношению напряжения статора к частоте. Следовательно, если отношение напряжения к частоте остается постоянным, магнитный поток остается постоянным.Кроме того, при поддержании постоянного V / F развиваемый крутящий момент остается приблизительно постоянным. Этот метод дает более высокую эффективность во время выполнения. Поэтому в большинстве приводов переменного тока для управления скоростью используется метод постоянного напряжения / частоты (или метод переменного напряжения и переменной частоты). Наряду с широким диапазоном регулирования скорости, этот метод также предлагает возможность «плавного пуска».4. Изменение количества полюсов статора
Из приведенного выше уравнения синхронной скорости можно увидеть, что синхронная скорость (и, следовательно, скорость движения) может быть изменена путем изменения количества полюсов статора.Этот метод обычно используется для асинхронных двигателей с короткозамкнутым ротором, поскольку ротор с короткозамкнутым ротором адаптируется к любому количеству полюсов статора. Смена полюсов статора достигается двумя или более независимыми обмотками статора, намотанными на разное количество полюсов в одинаковых пазах.Например, статор намотан с двумя 3-фазными обмотками, одна на 4 полюса, а другая на 6 полюсов.
для частоты питания 50 Гц
i) синхронная скорость при подключении 4-х полюсной обмотки, Ns = 120 * 50/4 = 1500 об / мин
ii) синхронная скорость при подключении 6-полюсной обмотки, Ns = 120 * 50/6 = 1000 об / мин
Регулировка скорости со стороны ротора:
1.Регулировка реостата ротора
Этот метод аналогичен управлению реостатом якоря параллельного двигателя постоянного тока. Но этот метод применим только к электродвигателям с фазным ротором, так как добавление внешнего сопротивления в ротор электродвигателей с короткозамкнутым ротором невозможно.2. Каскадный режим
В этом методе регулирования скорости используются два двигателя. Оба установлены на одном валу, поэтому оба работают с одинаковой скоростью. Один двигатель питается от трехфазного источника питания, а другой двигатель получает питание от наведенной ЭДС в первом двигателе через контактные кольца.Расположение показано на следующем рисунке.Двигатель A называется основным двигателем, а двигатель B – вспомогательным двигателем.
Пусть, N s1 = частота двигателя A
N с2 = частота двигателя B
P 1 = количество полюсов статора двигателя A
P 2 = количество полюсов статора двигателя B
N = скорость установки и одинаковая для обоих двигателей
f = частота питания
Теперь скольжение двигателя A, S 1 = (N s1 – N) / N s1 .
частота ЭДС, индуцированная ротором в двигателе A, f 1 = S 1 f
Теперь на вспомогательный двигатель B подается ЭДС индукции ротора
, следовательно, N s2 = (120f 1 ) / P 2 = (120S 1 f) / P 2 .
теперь ставим значение S 1 = (N s1 – N) / N s1
я.е. N = N с2 .
из приведенных выше уравнений можно получить, что
С помощью этого метода можно получить четыре различных скорости
1. когда работает только двигатель A, соответствующая скорость = .Ns1 = 120f / P 1
2. когда работает только двигатель B, соответствующая скорость = Ns2 = 120f / P 2
3. Если выполнено коммутационное каскадирование, скорость набора = N = 120f / (P 1 + P 2 )
4. Если выполняется дифференциальное каскадирование, скорость установки = N = 120f (P 1 – P 2 )
3.Путем подачи ЭДС в цепь ротора
В этом методе скорость асинхронного двигателя регулируется путем подачи напряжения в цепь ротора. Необходимо, чтобы подаваемое напряжение (ЭДС) имело ту же частоту, что и частота скольжения. Однако ограничений по фазе вводимой ЭДС нет. Если мы подаем ЭДС, которая находится в противофазе с ЭДС, индуцированной ротором, сопротивление ротора будет увеличиваться. Если мы введем ЭДС, которая находится в фазе с ЭДС, индуцированной ротором, сопротивление ротора уменьшится.Таким образом, изменяя фазу инжектируемой ЭДС, можно управлять скоростью. Основным преимуществом этого метода является широкий диапазон регулирования скорости (как выше нормы, так и ниже нормы). ЭДС может быть введена различными методами, такими как система Крамера, система Шербиуса и т. Д.VFD или симистор для асинхронных двигателей переменного тока?
Когда на асинхронный двигатель переменного тока подается напряжение, он работает с определенной скоростью. Требования к переменной скорости для асинхронных двигателей переменного тока обычно выполняются трехфазным двигателем и инвертором или частотно-регулируемым приводом.В этом сообщении в блоге также представлен еще один вариант.
Во-первых, давайте поговорим о наиболее распространенном методе управления скоростью для асинхронных двигателей переменного тока, которым является инвертор или частотно-регулируемый привод (VFD). Я больше всего знаком с серией FRENIC Mini C2 от Fuji Electric.
ЧРП Fuji Electric FRENIC Mini C2
Как это устройство контролирует скорость двигателя переменного тока? Давайте сначала поймем, почему двигатель работает с определенной скоростью. С математической точки зрения синхронная скорость двигателя рассчитывается по формуле:
Большинство промышленных асинхронных двигателей переменного тока являются 4-полюсными, поэтому скорость двигателя синхронизируется с частотой входного источника питания (Гц).При 60 Гц двигатель будет работать со скоростью 1800 об / мин.
Преобразователь частоты управляет скоростью двигателя с помощью ШИМ (широтно-импульсной модуляции) для изменения частоты источника питания, подаваемого на двигатель. Как правило, от двигателя нет обратной связи; хотя некоторые диски используют обратную ЭДС в качестве обратной связи.
Вот блок-схема логики управления частотно-регулируемым приводом FRENIC Mini C2 (из руководства). Обратите внимание на его сложность из-за огромного количества компонентов. Для повышения производительности обычно предлагаются такие функции, как динамическое усиление крутящего момента или управление компенсацией скольжения.
Одним из недостатков использования частотно-регулируемых приводов является то, что они могут быть дорогими и сложными в размере. Также требуется трехфазный асинхронный двигатель переменного тока с номинальной мощностью инвертора или, по крайней мере, с номинальной продолжительностью. Если двигатель оснащен тормозным механизмом, он обычно сокращает рабочий цикл. Я видел частотно-регулируемые приводы для однофазных двигателей на рынке в прошлом, но их трудно найти, и мы никогда не тестировали их с нашими двигателями.
Другой способ управления скоростью однофазных асинхронных двигателей переменного тока?
Теперь давайте посмотрим на другой метод управления скоростью.Взгляните на кривую крутящего момента однофазного асинхронного двигателя переменного тока, которая описывает, что двигатель будет делать после включения. Двигатель запускается со скоростью 0 об / мин, затем разгоняется до номинальной скорости. Обратите внимание, как входное напряжение влияет на форму кривой скорость-крутящий момент. Если момент нагрузки остается прежним, а входное напряжение снижается со 100 В до 90 В, то скорость двигателя снижается. Да, вы можете использовать напряжение для управления скоростью двигателя переменного тока .
ПРИМЕЧАНИЕ: максимальная скорость составляет ~ 1500 об / мин, поскольку входная мощность составляет 50 Гц.Для двигателей 60 Гц частота вращения 1500 об / мин будет равна 1800 об / мин.
Однако вы можете видеть, что скорость не сильно падает при падении напряжения на 10 В. Если напряжение снижается слишком сильно, двигатель может быть вынужден работать в нестабильной области (менее ~ 1000 об / мин) и, возможно, заглохнет. В идеале вы действительно хотите, чтобы двигатель работал с оптимальной номинальной скоростью для наилучшей и наиболее эффективной работы. Этот метод управления скоростью очень похож на метод управления скоростью щеточных двигателей постоянного тока.Однако диапазон оборотов управления скоростью намного шире у щеточных двигателей постоянного тока.
Чтобы этот метод управления был успешным, необходимо устройство обратной связи, чтобы замкнуть контур между двигателем и регулятором скорости. Эта обратная связь необходима для предотвращения слишком сильных колебаний скорости двигателя (и входного напряжения).
Oriental Motor использует тахогенераторы для замыкания контура между нашими двигателями с регулируемой скоростью переменного тока и контроллерами скорости, такими как серии DSC или US2. Тахогенератор, он же тахометр, вырабатывает напряжение, пропорциональное скорости.Он используется в непрерывном контуре обратной связи для поддержания точности скорости на уровне ± 1% или меньше.
Это упрощенная схема цепи управления для серии DSC.
Для всех, кому интересно, это схема цепи управления с более подробной информацией. Вы можете видеть, что мы используем TRIAC для управления напряжением. Также мы используем однополупериодный выпрямитель.
Показывает, как тахогенератор используется во время работы двигателя.
Поскольку схема управления намного менее сложна, чем у частотно-регулируемого привода, двигатели с регулируемой скоростью переменного тока являются более экономичным вариантом по сравнению с двигателями переменного тока с приводом от частотно-регулируемого привода.Метод управления фазой также демонстрирует меньший электрический шум по сравнению с двигателями с приводом от частотно-регулируемого привода, где частотно-регулируемые приводы переключаются с гораздо большей скоростью.
Еще одно преимущество, представленное в серии DSC, – это вертикальная работа. В прошлом двигатели тахогенераторов были проблемой при вертикальном перемещении. Причина в гравитации.
В этом примере двигатель перемещает груз вниз по ленточному конвейеру. Когда груз опускается, сила тяжести будет тянуть груз вниз и увеличивать его скорость.С увеличением скорости увеличивается напряжение тахогенератора. Это заставляет контроллер скорости думать, что двигатель движется слишком быстро, что снижает его напряжение, чтобы попытаться снизить скорость. Однако при понижении напряжения двигатель теряет крутящий момент. Этот процесс повторяется до тех пор, пока крутящий момент двигателя не истощится и нагрузка не упадет. В серии DSC функция останова при замедлении позволяет осуществлять контролируемое замедление с автоматическим электромагнитным торможением. |
Недостатком двигателей переменного тока с регулировкой скорости с обратной связью от тахогенератора является то, что на низких скоростях двигатель имеет определенные ограничения по крутящему моменту.Кривая крутящего момента скорости двигателя помечена, чтобы показать это. Убедитесь, что работает ниже «линии безопасной эксплуатации». Для комбинированных типов (мотор-редукторы) см. Пунктирную линию с надписью «Допустимый крутящий момент для комбинированного типа».
Другими словами, чтобы избежать этой проблемы, используйте мотор-редуктор.
Чтобы узнать больше о серии DSC или ее методе управления скоростью, прочтите официальный документ.
Подпишитесь, пожалуйста, в правом верхнем углу страницы!
| Есть ли другая альтернатива? | ||||||
Если требуется работа при более низких температурах, идеальным вариантом является более высокая энергоэффективность, лучшее регулирование скорости, постоянный выходной крутящий момент или более широкий диапазон скоростей. Для таких применений, как двойные ленточные конвейеры, машины для полировки / удаления заусенцев или перемешивающие машины, слишком сильные колебания скорости из-за нагрузки могут повлиять на конечный продукт. Если постоянный крутящий момент и регулировка скорости имеют решающее значение, а системы серводвигателей выходят за рамки бюджета, стоит подумать о бесщеточных двигателях.
Щелкните ниже, чтобы сравнить 3 доступные технологии управления скоростью. |
Формулы и уравнения линейных и асинхронных двигателей
Формулы и уравнения для линейных и асинхронных двигателейСледующие уравнения и формулы, относящиеся к линейным и асинхронным двигателям, могут использоваться для расчета основных параметров при анализе и проектировании однофазный и трехфазный асинхронный двигатель.
Формула и уравнения для асинхронного двигателя:
Индуцированная ЭДС:e ind = vB l
где
- e ind9 = скорость индуцированной ЭДС ротор
- B = плотность магнитного потока
- l = длина проводников внутри магнитного поля
Ток ротора определяется по формуле:
Используемые термины в уравнениях и формулах крутящего момента двигателя.
- N с = Синхронная скорость
- с = проскальзывание двигателя
- с b = проскальзывание при пробое или вырывание
- E 1 = напряжение статора или входное напряжение напряжение
- E 2 = ЭДС ротора на фазу в состоянии покоя
- R 2 = Сопротивление ротора по фазе
- X 2 = Реактивное сопротивление ротора по фазе
- 32 = напряжение питания напряжение
- K = соотношение оборотов ротора / статора по фазам
Пусковой момент
- Условие максимального пускового момента
R 2 = X T st α V 2 R 2 = sX 2 Скорость скольжения – это разница между синхронной скоростью и скоростью ротора; где скольжение асинхронного двигателя – это относительный показатель, выраженный в процентах.Это определяется как: Где Скорость ротора асинхронного двигателя определяется как Где Связанные термины, используемые в формулах и уравнениях мощности двигателя. Входная мощность ротора: P 2 = T g ω s P = T g ω P out = T sh ω P1 = P2 + потери статора = P m + потери меди в роторе = P out + потери на ветер и трение Входная мощность ротора: Выходная мощность Механическая мощность: Коэффициент потерь Cu в роторе: Где Крутящий момент, при котором машина на синхронной скорости будет генерировать один ватт; Где Где P 2 = Входная мощность ротора Соответствующие формулы и уравнения – Кривая скорости крутящего момента асинхронного двигателя Уравнение крутящего момента Тевенина было использовано выше для построения кривой крутящего момента асинхронной машины.Поскольку крутящий момент задается только как функция скольжения, можно использовать это уравнение, чтобы найти скольжение, при котором крутящий момент является максимальным. Однако математически более простой и интуитивно понятный
Ответ можно найти, рассматривая поток мощности в эквиваленте Тевенина на рис. 2. Анализируя полную эквивалентную схему, было замечено, что \ [
\ tau = \ frac {P_ {gap}} {\ omega_s}
\] Следовательно, поскольку синхронная скорость постоянна, максимальный крутящий момент возникает на
такое же скольжение, как и максимальная мощность воздушного зазора.{0.5} \ right)}
\] Из уравнений для крутящего момента и проскальзывания видно, что Если все остальные параметры остаются постоянными, увеличение сопротивления ротора будет: Последний пункт выше можно показать, учитывая, что уравнение крутящего момента \ [
\ tau = \ frac {3I_2 ^ 2R_2} {s \ omega_s}
\] – это фактически потеря меди в роторе, деленная на скорость скольжения. Пусковой
Момент Связь с напряжением питания
Электрическая частота на роторе:
Мощность асинхронного двигателя:
Синхронный Вт: Формула и уравнения для линейного асинхронного двигателя:
Синхронная скорость:
Где
Скольжение:
Сила : Обсуждение
