
%d1%81%d0%be%d0%bf%d1%80%d0%be%d1%82%d0%b8%d0%b2%d0%bb%d0%b5%d0%bd%d0%b8%d0%b5%20%d0%be%d0%b1%d0%bc%d0%be%d1%82%d0%ba%d0%b8%20%d1%81%d1%82%d0%b0%d1%82%d0%be%d1%80%d0%b0 — с русского на все языки
Все языкиАбхазскийАдыгейскийАфрикаансАйнский языкАканАлтайскийАрагонскийАрабскийАстурийскийАймараАзербайджанскийБашкирскийБагобоБелорусскийБолгарскийТибетскийБурятскийКаталанскийЧеченскийШорскийЧерокиШайенскогоКриЧешскийКрымскотатарскийЦерковнославянский (Старославянский)ЧувашскийВаллийскийДатскийНемецкийДолганскийГреческийАнглийскийЭсперантоИспанскийЭстонскийБаскскийЭвенкийскийПерсидскийФинскийФарерскийФранцузскийИрландскийГэльскийГуараниКлингонскийЭльзасскийИвритХиндиХорватскийВерхнелужицкийГаитянскийВенгерскийАрмянскийИндонезийскийИнупиакИнгушскийИсландскийИтальянскийЯпонскийГрузинскийКарачаевскийЧеркесскийКазахскийКхмерскийКорейскийКумыкскийКурдскийКомиКиргизскийЛатинскийЛюксембургскийСефардскийЛингалаЛитовскийЛатышскийМаньчжурскийМикенскийМокшанскийМаориМарийскийМакедонскийКомиМонгольскийМалайскийМайяЭрзянскийНидерландскийНорвежскийНауатльОрокскийНогайскийОсетинскийОсманскийПенджабскийПалиПольскийПапьяментоДревнерусский языкПортугальскийКечуаКвеньяРумынский, МолдавскийАрумынскийРусскийСанскритСеверносаамскийЯкутскийСловацкийСловенскийАлбанскийСербскийШведскийСуахилиШумерскийСилезскийТофаларскийТаджикскийТайскийТуркменскийТагальскийТурецкийТатарскийТувинскийТвиУдмурдскийУйгурскийУкраинскийУрдуУрумскийУзбекскийВьетнамскийВепсскийВарайскийЮпийскийИдишЙорубаКитайский
Все языкиАнглийскийНемецкийНорвежскийКитайскийИвритФранцузскийУкраинскийИтальянскийПортугальскийВенгерскийТурецкийПольскийДатскийЛатинскийИспанскийСловенскийГреческийЛатышскийФинскийПерсидскийНидерландскийШведскийЯпонскийЭстонскийТаджикскийАрабскийКазахскийТатарскийЧеченскийКарачаевскийСловацкийБелорусскийЧешскийАрмянскийАзербайджанскийУзбекскийШорскийРусскийЭсперантоКрымскотатарскийСуахилиЛитовскийТайскийОсетинскийАдыгейскийЯкутскийАйнский языкЦерковнославянский (Старославянский)ИсландскийИндонезийскийАварскийМонгольскийИдишИнгушскийЭрзянскийКорейскийИжорскийМарийскийМокшанскийУдмурдскийВодскийВепсскийАлтайскийЧувашскийКумыкскийТуркменскийУйгурскийУрумскийЭвенкийскийБашкирскийБаскский
МЕТОД ИДЕНТИФИКАЦИИ СОПРОТИВЛЕНИЙ СТАТОРА И РОТОРА АСИНХРОННОГО ДВИГАТЕЛЯ Известия высших учебных заведений Приборостроение
DOI 10.
 17586/0021-3454-2017-60-9-807-811
17586/0021-3454-2017-60-9-807-811УДК 681.51
МЕТОД ИДЕНТИФИКАЦИИ СОПРОТИВЛЕНИЙ СТАТОРА И РОТОРА АСИНХРОННОГО ДВИГАТЕЛЯ
Базылев Д. Н.Университет ИТМО, Санкт-Петербург, 197101, Российская Федерация; аспирант
Бобцов А. А.
Университет ИТМО, Санкт-Петербург, 197101, Российская Федерация; директор мегафакультета
Пыркин А. А.
Университет ИТМО, Санкт-Петербург, 197101, Российская Федерация; профессор, декан
Ортега Р. .
Национальный центр научных исследований, Париж, 75016, Франция; директор по исследованиям
Читать статью полностью
Аннотация.
Представлен метод оценивания сопротивлений статора и ротора асинхронного двигателя. Разработанный алгоритм также позволяет оценивать магнитный поток ротора. Предполагается, что токи и напряжения обмоток статора, а также механическая скорость ротора являются измеримыми, а все остальные параметры двигателя известны.
Ключевые слова: идентификация, адаптивный наблюдатель, асинхронный двигатель, сопротивление ротора и статора
Список литературы:
- De Wit P., Ortega R., Mareels I. Indirect eld-oriented control of induction motors is robustly globally stable // Automatica. 1996. N 30(10). P. 1393—1402.
- Marino R., Peresada S., Tomei P. Online stator and rotor resistance estimation for induction motors // IEEE Transact. on Control Systems Technology. 2000. N 8(3). P. 570—579.
- Pavlov A., Zaremba A. Real-time rotor and stator resistances estimation of an induction motor // Proc. IFAC Symp. on Nonlinear Control Systems. St. Petersburg, Russia. 2001. P. 1252—1257.
-
Castaldi P., Geri W., Montanari M., Tilli A. A new adaptive approach for on-line parameter and state estimation of induction motors // Control Eng.
 Pract. 2005. N 13(1). P. 81—94.
Pract. 2005. N 13(1). P. 81—94. - Matsuo T., Lipo T. A. A rotor parameter identification scheme for vector-controlled induction motor drives // IEEE Transact. on Industry Applications. 1985. N 21(4). P. 624—632.
- Wade S., Dunnigan M., Williams B. A new method of rotor resistance estimation for vector-controlled induction machines // IEEE Transact. on Industrial Electronics. 1997. N 44(2). P. 247—257.
- Laroche E., Sedda E., Durieu C. Methodological insights for online estimation of induction motor parameters // IEEE Transact. on Control Systems Technology. 2008. N 16(5). P. 1021—1028.
- Li-Campbell M., Chiasson J., Bodson M., Tolbert L. Speed sensorless identification of the rotor time constant in induction machines // IEEE Transact. on Automatic Control. 2007. N 52(4). P. 758—763.
-
Ortega R., Bobtsov A., Pyrkin A., Aranovskiy A. A parameter estimation approach to state observation of nonlinear systems // Systems and Control Letters.
 2015. N 85. P. 84—94.
2015. N 85. P. 84—94. - Aranovskiy S., Bobtsov A., Ortega R., Pyrkin A. Parameter estimation via dynamic regressor extension and mixing // Amer. Control Conf., ACC’16. 2016.
- Astolfi A., Karagiannis D., Ortega R. Nonlinear and Adaptive Control with Applications. Springer, 2008.
- Aranovskiy S., Bobtsov A., Pyrkin A., Ortega R., Chaillet A. Flux and position observer of permanent magnet synchronous motors with relaxed persistency of excitation conditions // Proc. of the 1st IFAC Conf. on Modelling, Identification and Control of Nonlinear Systems. 2015. P. 311—316.
Состояние обмотки электрического двигателя
Состояние обмотки электрического двигателя
Электродвигатели изготавливают в различных вариантах и модификациях, их неисправности также бывают самыми разными. Конечно, не любую неисправность можно диагностировать самостоятельно, но наиболее часто проверка обмоток электродвигателя вполне возможна.
На первый взгляд обмотка представляет кусок проволоки смотанной определенным образом и в ней нечему особо ломаться. Но у нее есть особенности:
- строгий подбор однородного материала по всей длине;
- точная калибровка формы и поперечного сечения;
- нанесение в заводских условиях слоя лака, обладающего высокими изоляционными свойствами;
- прочные контактные соединения.
Если в каком-либо месте провода нарушена любое из этих требований, то изменяются условия для прохождения электрического тока и двигатель начинает работать с пониженной мощностью или вообще останавливается.
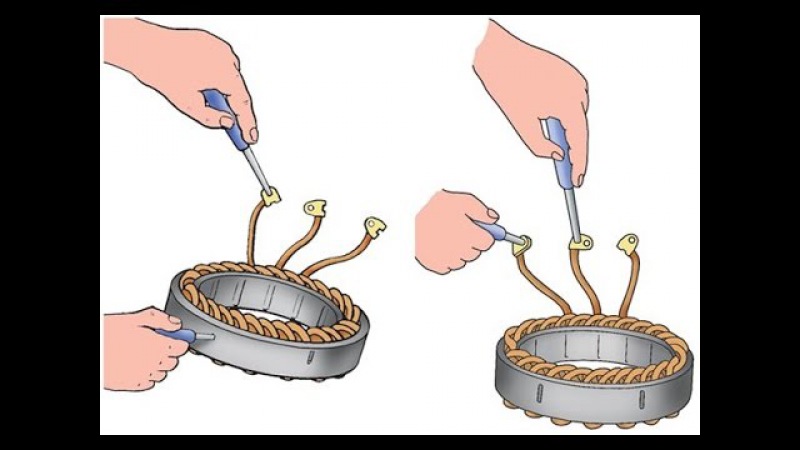
Чтобы проверить одну обмотку трехфазного двигателя необходимо отключить ее от других цепей. Во всех электродвигателях они могут собираться по одной из двух схем:
1. звезды;
2. треугольника.
Концы обмоток обычно выводятся на клеммные колодки и маркируются буквами «Н» (начало) и «К» (конец). Иногда отдельные соединения могут быть спрятаны внутри корпуса, а для выводов используются другие способы обозначения, например, цифрами.
У трехфазного двигателя на статоре используются обмотки с одинаковыми электрическими характеристиками, обладающими равными сопротивлениями. Если при замере омметром они показывают разные значения, то это уже повод серьезно задуматься над причинами разброса показаний.
Как проявляются неисправности в обмотке
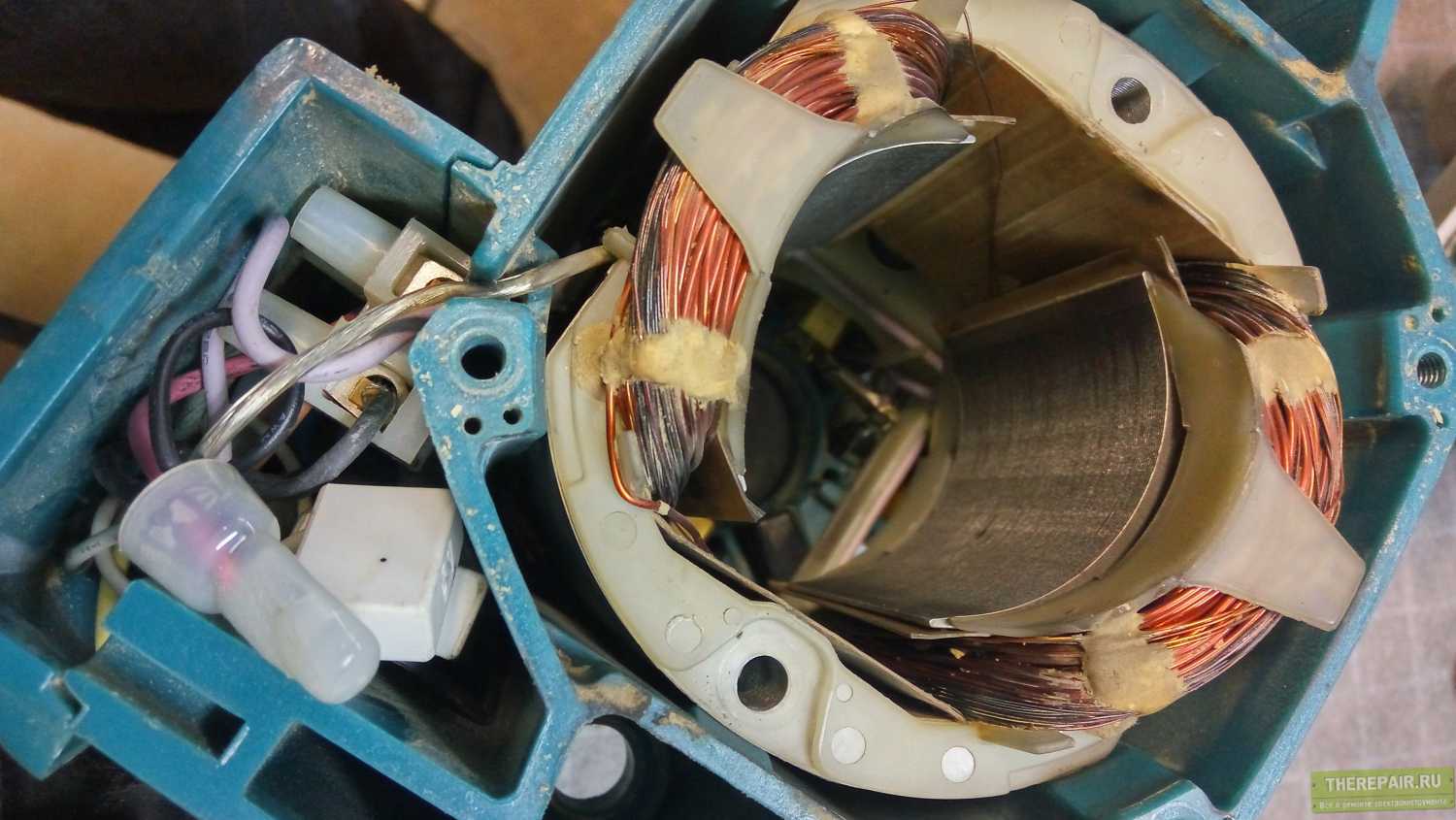
Визуально оценить качество обмоток не представляется возможным из-за ограниченного допуска к ним. На практике проверяют их электрические характеристики, учитывая, что все неисправности обмоток проявляются:
- обрывом, когда нарушается целостность провода и исключается прохождение электрического тока по нему;
- коротким замыканием, возникающем при нарушении слоя изоляции между входным и выходным витком, характеризующимся исключением обмотки из работы с шунтированием концов;
- межвитковым замыканием, когда изоляция нарушается между одним или несколькими близкорасположенными витками, которые этим выводятся из работы. Ток проходит по обмотке, минуя короткозамкнутые витки, не преодолевая их электрическое сопротивление и не создавая ими определенной работы;
- пробоем изоляции между обмоткой и корпусом статора или ротора.
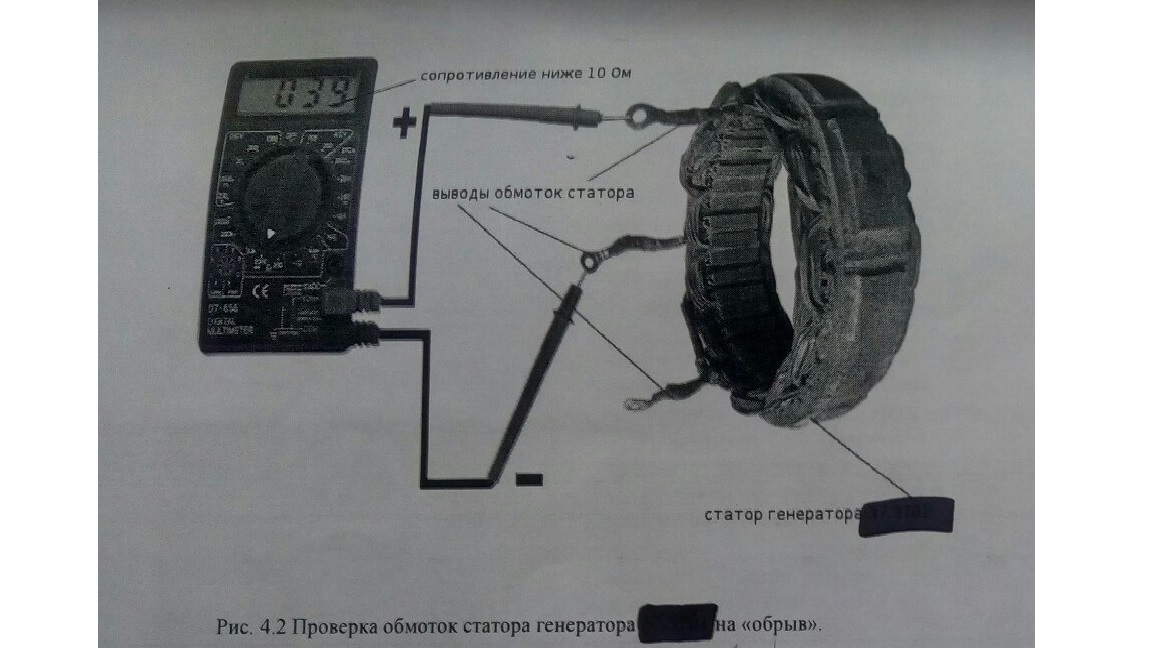
Проверка обмотки на обрыв провода
Этот вид неисправности определяется замером сопротивления изоляции омметром. Прибор покажет большое сопротивление — ∞, которое учитывает образованный разрывом участок воздушного пространства.
Проверка обмотки на возникновение короткого замыкания
Двигатель, внутри электрической схемы которого возникло короткое замыкание, отключается защитами от сети питания. Но, даже при быстром выводе из работы таким способом место возникновения КЗ хорошо видно визуально за счет последствий воздействия высоких температур с ярко выраженным нагаром или следами оплавления металлов.
При электрических способах определения сопротивления обмотки омметром получается очень маленькая величина, сильно приближенная к нулю. Ведь из замера исключается практически вся длина провода за счет случайного шунтирования входных концов.
Проверка обмотки на возникновение межвиткового замыкания
Это наиболее скрытая и сложно определяемая неисправность.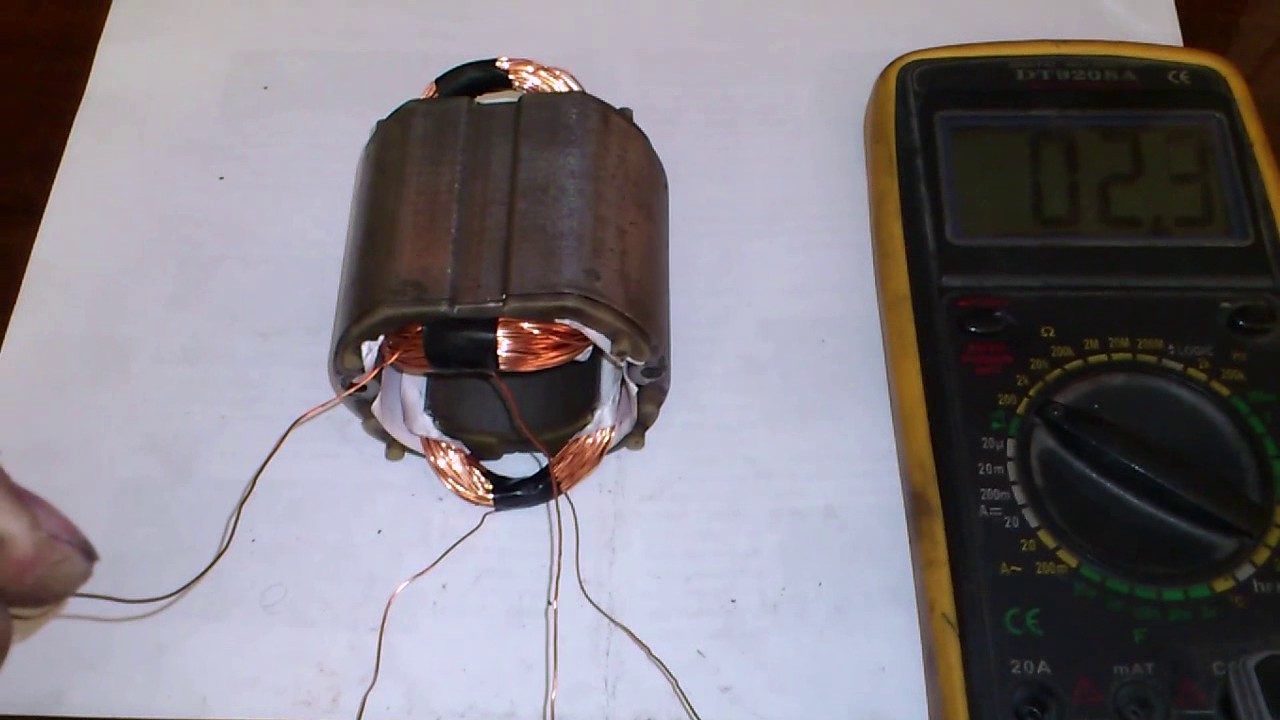 Для ее выявления можно воспользоваться несколькими методиками.
Для ее выявления можно воспользоваться несколькими методиками.
Способ омметра
Прибор работает на постоянном токе и замеряет только активное сопротивление проводника. Обмотка же при работе за счет витков создает значительно большую индуктивную составляющую.
При замыкании одного витка, а их общее количество может быть несколько сотен, изменение активного сопротивления заметить очень сложно. Ведь оно меняется в пределах нескольких процентов от общей величины, а подчас и меньше.
Можно попробовать точно откалибровать прибор и внимательно измерить сопротивления всех обмоток, сравнивая результаты. Но разница показаний даже в этом случае не всегда будет видна.
Более точные результаты позволяет получить мостовой метод измерения активного сопротивления, но это, как правило, лабораторный способ, недоступный большинству электриков.
Замер токов потребления в фазах
При межвитковом замыкании изменяется соотношение токов в обмотках, проявляется излишний нагрев статора. У исправного двигателя токи одинаковы. Поэтому прямое их измерение в действующей схеме под нагрузкой наиболее точно отражает реальную картину технического состояния.
У исправного двигателя токи одинаковы. Поэтому прямое их измерение в действующей схеме под нагрузкой наиболее точно отражает реальную картину технического состояния.
Измерения переменным током
Определить полное сопротивление обмотки с учетом индуктивной составляющей в полной рабочей схеме не всегда возможно. Для этого придется снимать крышку с клеммной коробки и врезаться в проводку.
У выведенного из работы двигателя можно использовать для замера понижающий трансформатор с вольтметром и амперметром. Ограничить ток позволит токоограничивающий резистор или реостат соответствующего номинала.
При выполнении замера обмотка находится внутри магнитопровода, а ротор или статор могут быть извлечены. Баланса электромагнитных потоков, на условие которого проектируется двигатель, не будет. Поэтому используется пониженное напряжение и контролируются величины токов, которые не должны превышать номинальных значений.
Замеренное на обмотке падение напряжения, поделенное на ток, по закону Ома даст значение полного сопротивления.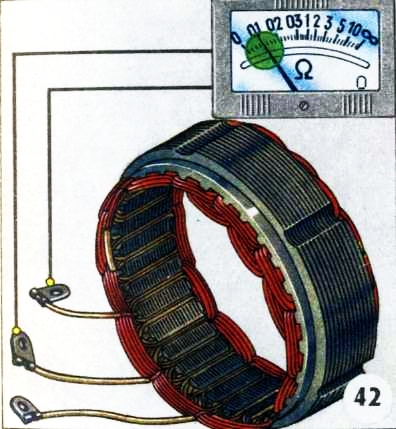 Его останется сравнить с характеристиками других обмоток.
Его останется сравнить с характеристиками других обмоток.
Эта же схема позволяет снять вольтамперные характеристики обмоток. Просто надо выполнить замеры на разных токах и записать их в табличной форме или построить графики. Если при сравнении с аналогичными обмотками серьёзных отклонений нет, то межвитковое замыкание отсутствует.
Шарик в статоре
Способ основан на создании вращающегося электромагнитного поля исправными обмотками. Для этого на них подается трехфазное симметричное напряжение, но обязательно пониженной величины. С этой целью обычно применяют три одинаковых понижающих трансформатора, работающих в каждой фазе схемы питания.
Для ограничения токовых нагрузок на обмотки эксперимент проводят кратковременно.
Небольшой стальной шарик от шарикоподшипника вводят во вращающееся магнитное поле статора сразу после включения витков под напряжение. Если обмотки исправны, то шарик синхронно катается по внутренней поверхности магнитопровода.
Когда одна из обмоток имеет межвитковое замыкание, то шарик зависнет в месте неисправности.
Во время теста нельзя превышать ток в обмотках больше номинальной величины и следует учитывать, что шарик свободно выскакивает из корпуса со скоростью вылета из рогатки.
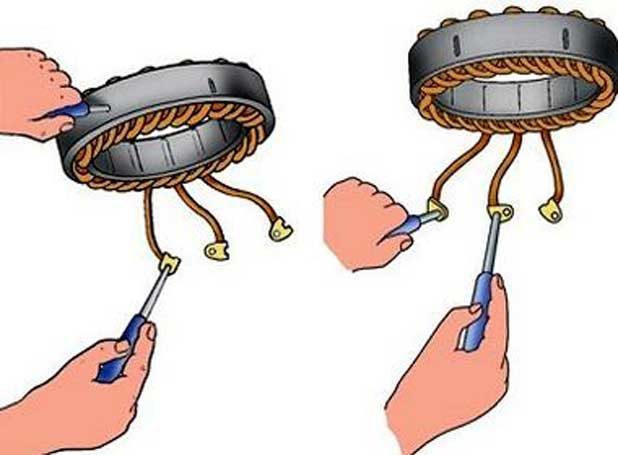
Электрическая проверка полярности обмоток
У статорных обмоток может отсутствовать маркировка начала и концов выводов и это затруднит правильность сборки.
На практике для поиска полярности используются 2 способа:
1. с помощью маломощного источника постоянного тока и чувствительного амперметра, показывающего направление тока;
2. методом использования понижающего трансформатора и вольтметра.
В обоих вариантах статор рассматривается как магнитопровод с обмотками, работающий по аналогии трансформатора напряжения.
Проверка полярности посредством батарейки и амперметра
На внешней поверхности статора выведены шестью проводами три отдельных обмотки, начала и концы которых надо определить.
С помощью омметра вызванивают и помечают вывода, относящиеся к каждой обмотке, например, цифрами 1, 2, 3. Затем произвольно маркируют на любой из обмоток начало и конец. К одной из оставшихся обмоток подключают амперметр со стрелкой посередине шкалы, способной указывать направление тока.
Минус батарейки жестко подключают к концу выбранной обмотки, а плюсом кратковременно прикасаются к ее началу и сразу разрывают цепь.
При подаче импульса тока в первую обмотку он за счет электромагнитной индукции трансформируется во вторую замкнутую через амперметр цепь, повторяя первоначальную форму. Причем, если полярность обмоток угадана правильно, то стрелка амперметра отклонится вправо при начале импульса и отойдет влево при размыкании цепи.
Если стрелка ведет себя по-другому, то полярность просто перепутана. Останется только промаркировать выводы второй обмотки.
Очередная третья обмотка проверяется аналогичным образом.
Проверка полярности посредством понижающего трансформатора и вольтметра
Здесь тоже вначале вызванивают обмотки омметром, определяя вывода, которые к ним относятся.
Затем произвольно маркируют концы первой выбранной обмотки для подключения к понижающему трансформатору напряжения, например, на 12 вольт.
Две оставшиеся обмотки случайным образом скручивают в одной точке двумя выводами, а оставшуюся пару подключают к вольтметру и подают питание на трансформатор. Его выходное напряжение трансформируется в остальные обмотки с такой же величиной, поскольку у них равное число витков.
За счет последовательного подключения второй и третьей обмоток вектора напряжения сложатся, а их сумму покажет вольтметр. В нашем случае при совпадении направления обмоток эта величина будет составлять 24 вольта, а при разной полярности — 0.
Останется промаркировать все концы и выполнить контрольный замер.
В статье дан общий порядок действий при проверке технического состояния какого-то произвольного двигателя без конкретных технических характеристик. Они в каждом индивидуальном случае могут меняться. Смотрите их в документации на ваше оборудование.
Ранее ЭлектроВести писали, что компания Volkswagen начала сборку на заводе в Цвикау (Германия) предсерийных образцов VW ID.5. Электромобиль будет доступен для продажи в конце этого года, хотя и не на всех рынках. Будет ли он продаваться в США, пока неизвестно.
По материалам: electrik.info.
Статоры– обзор | Темы ScienceDirect
Металлические статоры
Металлические статоры, также известные как жесткие статоры, могут поставляться, когда требования, условия эксплуатации и экономия согласованы. Металлические статоры могут выдерживать гораздо более высокое давление на ступень, чем эластомерные статоры, до 500 фунтов на квадратный дюйм на ступень. Они используются при перекачке более 5000 сП и позволяют использовать насосы с гораздо меньшей длиной для работы под высоким давлением, чем это было бы возможно для насосов PC. Посадка ротор-статор выполняется с зазором.Следовательно, снятие, очистка и повторная установка ротора намного проще и быстрее. Это особенно выгодно там, где требуется уборка каждую смену, например, на пищевых предприятиях. Продукты, которые чаще всего перекачиваются в пищевой промышленности, включают мясные эмульсии, начинки для печенья, глазурь для торта и печенья, глюкозу, клеи, пасты, горячую смазку и патоку, а также краски, горячие смолы, лаки и аналогичные высоковязкие материалы.
Это особенно выгодно там, где требуется уборка каждую смену, например, на пищевых предприятиях. Продукты, которые чаще всего перекачиваются в пищевой промышленности, включают мясные эмульсии, начинки для печенья, глазурь для торта и печенья, глюкозу, клеи, пасты, горячую смазку и патоку, а также краски, горячие смолы, лаки и аналогичные высоковязкие материалы.
Металлические статоры доступны из различных нержавеющих сталей, а также из инструментальных сталей.Поскольку практически отсутствует контакт ротора со статором, исключается загрязнение продукта частицами износа эластомера. Насосы ПК с металлическим статором также могут работать при более высоких температурах, до 500 ° F, с модификациями со стороны привода. Они более устойчивы к истиранию при том же давлении на ступень, что и неметаллический статор, и могут иметь срок службы в десять раз больше, чем эластомерный статор. Они обладают более широкой химической совместимостью, чем это возможно с большинством эластомеров. При использовании в качестве насоса высокого давления с малым числом ступеней начальная стоимость насоса может быть аналогична эластомерной конструкции с большим числом ступеней. Как правило, максимальная скорость для насосов, оснащенных металлическими статорами, составляет 400 об / мин, а максимальный размер частиц – 200 микрон. Использование металлического статора (и соответствующего ротора) с меньшим количеством ступеней снижает вязкое сопротивление ротору, а меньшее трение повышает эффективность работы насоса.
Как правило, максимальная скорость для насосов, оснащенных металлическими статорами, составляет 400 об / мин, а максимальный размер частиц – 200 микрон. Использование металлического статора (и соответствующего ротора) с меньшим количеством ступеней снижает вязкое сопротивление ротору, а меньшее трение повышает эффективность работы насоса.
Доступны и другие специальные конструкции, такие как полые роторы, показанные на рис. 121. Это уменьшает массу ротора и помогает уменьшить силы дисбаланса и вибрации ротора, а также продлевает срок службы.
РИСУНОК 121.Конструкция с полым ротором.
Испытание асинхронного двигателя постоянным током для сопротивления статора и испытание заторможенного ротора
Здравствуйте, друзья, надеюсь, у всех у вас все хорошо. В сегодняшнем руководстве мы рассмотрим испытание асинхронного двигателя постоянного тока на сопротивление статора и испытание заторможенного ротора. Резистор ротора (R2) играет очень важную роль в работе асинхронного двигателя. Это также помогает найти схему кривой крутящего момента-скорости и рассчитать скорость, при которой будет выходить максимальный крутящий момент (отрывной).Чтобы измерить общее сопротивление, которое существует в цепи двигателя, на двигателе проводится испытание заблокированного ротора. Поскольку этот тест вычисляет полное значение сопротивления схемы.
Это также помогает найти схему кривой крутящего момента-скорости и рассчитать скорость, при которой будет выходить максимальный крутящий момент (отрывной).Чтобы измерить общее сопротивление, которое существует в цепи двигателя, на двигателе проводится испытание заблокированного ротора. Поскольку этот тест вычисляет полное значение сопротивления схемы.
Чтобы рассчитать сопротивление (R 2 ) ротора, мы должны иметь представление о R 1 (сопротивление статора), чтобы его можно было вычесть из общего сопротивления. Тест проводится на двигателе, чтобы определить сопротивление (R1) статора, которое называется испытанием на постоянном токе асинхронного двигателя. В сегодняшней статье мы рассмотрим работу, уравнение, схему и другие параметры этих двух тестов.Итак, давайте начнем с испытания асинхронного двигателя постоянным током на сопротивление статора и испытание заторможенного ротора.
Испытание асинхронного двигателя постоянным током на сопротивление статора
- В при испытании асинхронного двигателя постоянным током, напряжение постоянного тока подается на статор асинхронного двигателя.
 Поскольку на входе используется постоянный ток, в роторе не будет индуцированного напряжения и ток не будет перемещаться по постоянному току. Реактивное сопротивление (X r ) двигателя также будет «0» при постоянном токе.
Поскольку на входе используется постоянный ток, в роторе не будет индуцированного напряжения и ток не будет перемещаться по постоянному току. Реактивное сопротивление (X r ) двигателя также будет «0» при постоянном токе. - Итак, единственный элемент, который ограничивает ток в двигателе, – это сопротивление статора, и его можно рассчитать с помощью теста постоянного тока.
- Принципиальная схема для испытания на постоянном токе показана на данной диаграмме.
- Вы можете видеть, что в этой схеме двигатель имеет Y-образную цепь, и две клеммы этого соединения связаны с источником постоянного тока.
- Для проведения теста ток на статоре устанавливается на номинальное значение, затем напряжение измеряется подключенным измерителем напряжения.
- Ток на статоре устанавливается на номинальное значение, чтобы получить такое же состояние нагрева, которое имеет двигатель во время его нормальной работы.
- Как мы знаем, два вывода обмоток статора соединены с входом постоянного тока, поэтому ток проходит через 2 обмотки, поэтому общее сопротивление на пути тока будет (2R 1 ).
 Что дано здесь.
Что дано здесь.
2R 1 = V DC / I DC
R 1 = В DC / 2I DC
- Определив значение R 1 , можно измерить потери статора на статоре и рассчитать потери P rot , исключив потери статора из входной мощности (P IN ).
Что такое испытание асинхронного двигателя с заторможенным ротором
- Существует еще один тест, который выполняется на двигателе, чтобы узнать различные ограничения двигателей, тест заблокированного ротора, также известный как тест блочного ротора .
- В этом двигателе ротор статичен, и на двигатель подается входное питание и соответствующий ток, напряжение измеряется в соответствии с питанием.
- Испытание заторможенного ротора также похоже на испытание на короткое замыкание асинхронного двигателя.
- Вы можете увидеть принципиальную схему теста заторможенного ротора.
 Во время этого теста мы подадим переменное напряжение на статор двигателя и установим ток при полной нагрузке.
Во время этого теста мы подадим переменное напряжение на статор двигателя и установим ток при полной нагрузке. - После установки тока при полной нагрузке вычисляются такие параметры двигателя, как ток-напряжение и мощность.
- Соответствующая схема для этого теста изображена на схеме.
- Вы можете видеть, что поскольку ротор не движется, значение скольжения будет равно единице.
- Таким образом, сопротивление ротора по формуле R 2 / с станет R 2 (имеет очень меньшее значение), поскольку значение скольжения равно единице.
- Поскольку значения R 2 и X 2 очень меньше, общий входной ток будет проходить через эти два параметра вместо его перемещения за счет более высокого реактивного сопротивления намагничивания (X M ).
- Таким образом, электрическая схема двигателя в этих ситуациях ведет себя как последовательная цепь с X1, R1, X2 и R2.
Проблема испытания заторможенного ротора асинхронного двигателя
- Есть одна проблема, с которой мы обычно сталкиваемся во время этого теста.
- Во время нормальной работы частота статора будет меньше входной частоты питания, которая составляет пятьдесят или шестьдесят герц.
- В исходных ситуациях частота ротора также будет иметь то же значение, что и частота входного питания.
- Тем не менее, в обычных рабочих условиях двигатель имеет скольжение (я) почти на два-четыре процента, и результирующая частота ротора находится в диапазоне от одного до трех герц.
- Проблема заключается в том, что частота входного питания не соответствует нормальному состоянию ротора.
- Между тем, сопротивление ротора является основной функцией частоты для двигателей классов B и C, неправильная частота ротора может вызвать искажающие результаты этого теста.
- Характерной чертой сотрудничества является использование частоты на двадцать пять% или меньше номинальной частоты.
- Принимая во внимание, что эта тактика подходит для конструкции ротора с принципиально постоянным сопротивлением, такой как классы A и D, она оставляет желать лучшего (желательного), когда кто-то работает, чтобы найти нормальное значение резистора ротора для ротора с переменным сопротивлением.

- Из-за этих и подобных проблем во время этих испытаний следует проявлять большую осторожность.
Уравнение испытания асинхронного двигателя с заторможенным ротором
- После установки испытательной частоты и напряжения ток, движущийся в двигателе, быстро достигнет номинального значения, и входная мощность (P в ), напряжение (В) и ток (I) рассчитываются до того, как ротор станет горячий (разогреть).
- Входная мощность двигателя определяется как.
P дюйм = √3V T I L cosø
- P.F заблокированного ротора можно рассчитать по этому уравнению.
PF = cosø = Pin / √3V T I L
- Величина полного сопротивления в цепи двигателя определяется как.
Z LR = V ø / I 1 = V T / √3I L
- Угол полного сопротивления определяется как.
Z LR = R LR + jX ’ LR
= Z LR cosø + j (Z LR ) sinø
- Отсюда сопротивление заблокированного ротора
R LR = 1 R 2
RR- И реактивное сопротивление заблокированного ротора будет.
X ’ LR = X’ 1 + X ’ 2
- В этом уравнении X ’ 1, и X’ 2 – это реактивное сопротивление ротора и статора на испытательной частоте.
- Сопротивление ротора также можно записать как.
R 2 = R LR -R 1
- В этом уравнении R 1 – это значение сопротивления статора, которое мы вычисляем во время испытания постоянным током.
- Полное реактивное сопротивление ротора (X r ), указанное для статора, также может быть рассчитано.Поскольку реактивное сопротивление (X) прямо пропорционально частоте (f), полное соответствующее реактивное сопротивление при номинальной рабочей частоте может быть рассчитано по этой формуле.

X LR = f номинальное значение / f испытание X ’ LR = X 1 + X 2
- К сожалению, не существует простейшего способа изолировать зависимость реактивных сопротивлений статора и ротора друг от друга.
- С течением времени понимание показало, что двигатели определенных проектных категорий имеют определенные отношения между реактивными сопротивлениями ротора и статора.
- Данная диаграмма объясняет соотношение между этими двумя реактивными сопротивлениями.
Итак, что все о тесте асинхронного двигателя постоянного тока для сопротивления статора и теста заторможенного ротора, если вы хотите узнать что-то еще об этих тестах или отредактировать что-то, вы можете прокомментировать ниже. Увидимся в следующем уроке, однофазный асинхронный двигатель.
Вы также можете прочитать некоторые статьи, связанные с асинхронным двигателем. Это описано здесь.
Это описано здесь.
Автор: Генри
http://www.theengineeringknowledge.comЯ профессиональный инженер и закончил известный инженерный университет, а также имею опыт работы инженером в различных известных отраслях. Я также пишу технический контент, мое хобби – изучать новые вещи и делиться ими с миром. Через эту платформу я также делюсь своими профессиональными и техническими знаниями со студентами инженерных специальностей.
Сообщение навигации
Проверенные и эффективные методы l Лучшее руководство 2020
Статор – это стационарная часть генератора переменного тока мотоцикла, которая может быть очень сложной, особенно для начинающих.Из-за этого очень важно внимательно изучить основную электрическую систему, которая в основном используется на мотоциклах. Это одна из важнейших частей любого транспортного средства, которая производит и в то же время хранит электроэнергию, которая позже будет использоваться для ее выполнения.
Однако есть ли у вас знания и навыки, как проверять статор? Если нет, то не о чем беспокоиться, потому что эта статья покажет вам различные методы проверки статора.
С помощью высококачественного мультиметра вы можете проверить статоры мотоцикла, даже если они установлены на байке.Тесты очень необходимы, так как они помогут вам определить или даже устранить статор транспортного средства как основную проблему при зарядке.
Имейте в виду, что вы не можете проверить регулятор-выпрямитель, поэтому первое, что вам нужно сделать, это избавиться от другой возможности. Вот почему необходимы знания о том, как проверить статор, когда дело доходит до определения того, плохой ли у вас регулятор.
Читайте также:
Как правильно понижать передачу на мотоцикле и подбирать обороты в соответствии со скоростями дороги для плавной езды
Как мыть Harley: правильный способ помочь вамКак проверить статор: проверенные эффективные методы использования
Вот некоторые из лучших методов, которые вы можете использовать для правильной проверки статора
Необходимо несколько простых проверок, чтобы устранить причины низкой выходной мощности системы зарядки.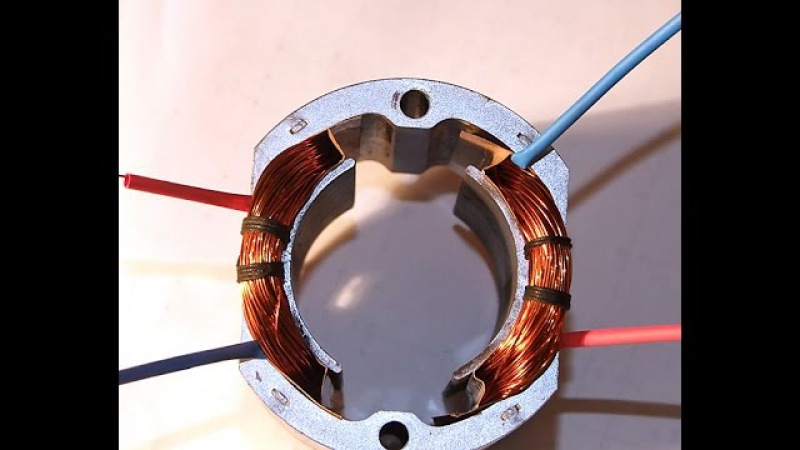 С помощью мультиметра, который в основном настроен на постоянное напряжение, проверьте напряжение аккумулятора на всех контактах. Учтите, что если у вас нет около 12,5 вольт, необходимо установить зарядное устройство.
С помощью мультиметра, который в основном настроен на постоянное напряжение, проверьте напряжение аккумулятора на всех контактах. Учтите, что если у вас нет около 12,5 вольт, необходимо установить зарядное устройство.
После этого зарядите аккумулятор. Когда это будет сделано, проверьте стойки и кабельные наконечники на предмет коррозии. При необходимости очистите их с помощью клеммы или проволочной щетки. Прочтите это, чтобы узнать, как работает проверка статора.
По возможности проверьте состояние кабеля и найдите пробой изоляции.После этого проверьте состояние минуса аккумулятора до соединения с шасси и от статора до соединения с регулятором. Контактные точки всегда должны быть защищены от коррозии.
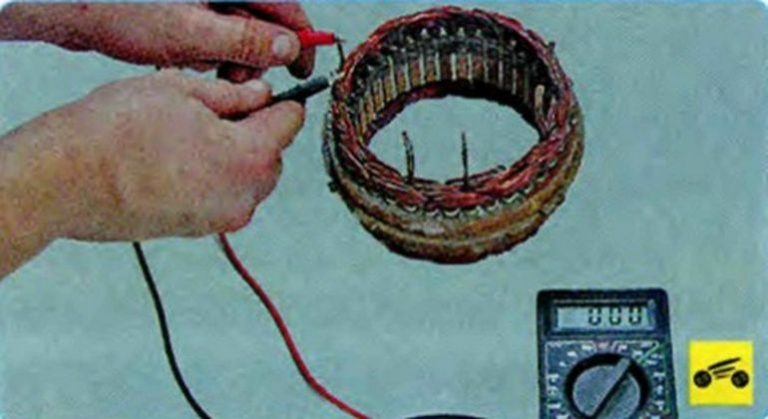
Вы можете немедленно выполнить визуальный осмотр, как только ваш статор обнажен. Знайте, нет ли на катушке обрыва проводов, пробоев изоляции или даже термических повреждений. Очень важно проверить концы внешних двигателей змеевика на предмет контакта с его ротором.
При необходимости замените статор и внимательно осмотрите статор, чтобы убедиться, что на нем нет битов магнита. В дополнение к этому, также необходимо проверить ротор, чтобы определить, есть ли сломанные магниты. Поскольку магниты нельзя заменить по отдельности, всегда важно заменять ротор как единое целое, особенно если он поврежден.
Если у вас есть проблемы с зарядкой, действительно важно иметь базовое представление о том, как тестировать статор. Это очень важно, поскольку задача статора – обеспечивать дополнительную мощность, которая в первую очередь необходима для зарядки аккумулятора, особенно во время работы.Если у вашего статора недостаточно мощности, скорее всего, батарея начнет разряжаться.
Другие советы профессионалов по тестированию статора
Если вы не знаете, как проверить статор, вы должны иметь в виду, что вам следует начать с проверки непрерывности с клеммных контактов разъема. После этого посмотрите, не упадет ли что-нибудь в землю. Чтобы это проверить, необходимо установить мультиметр на Ом. Вы должны использовать один из выводов мультиметра, чтобы проверить сопротивление вкладки путем проверки от A к B, от B к C и от A к C.
После этого посмотрите, не упадет ли что-нибудь в землю. Чтобы это проверить, необходимо установить мультиметр на Ом. Вы должны использовать один из выводов мультиметра, чтобы проверить сопротивление вкладки путем проверки от A к B, от B к C и от A к C.
Не нужно быть экспертом, чтобы знать лучшие методы проверки статора. С помощью вышеупомянутых процедур и советов теперь вы можете легко и удобно провести тест самостоятельно. Если вы все еще сомневаетесь, вы можете следить за этим, чтобы руководствоваться вами на протяжении всей процедуры. Таким образом, вы можете гарантировать, что сможете выполнить тест без особых трудностей.
Статор – неотъемлемая часть любого транспортного средства. Это, пожалуй, основная причина, по которой всегда необходимо иметь полное представление о различных методах проверки статора.Таким образом, вы всегда можете быть уверены, что ваш автомобиль находится в отличном состоянии.
Хорошо то, что на рынке существует множество конструкций статора мотоцикла. Однако большинство из них в основном соблюдают один и тот же основной принцип. При этом важно выбрать тот, который соответствует потребностям вашего автомобиля.
Однако большинство из них в основном соблюдают один и тот же основной принцип. При этом важно выбрать тот, который соответствует потребностям вашего автомобиля.
Измерение сопротивления обмоток электродвигателей / генераторов
Метод измерения
Для испытания сопротивления обмотки двигателя используется четырехпроводной метод измерения (Кельвина).Он обеспечивает наилучшие возможные результаты измерения, поскольку гарантирует, что сопротивление соединительных токоведущих кабелей не будет учтено при измерении.
Испытательный ток пропускают через обмотки с помощью сильноточных кабелей. Падение напряжения на обмотках измеряется с помощью сенсорных кабелей.
Размещение кабелей очень важно. Токовые кабели всегда должны быть размещены вне чувствительных кабелей. Таким образом, сопротивление как кабелей, так и зажимов практически полностью исключено из измерения сопротивления (Рисунок 1).Сопротивление рассчитывается по закону Ома и равно падению напряжения, деленному на испытательный ток:
R = U / I
Рисунок 1 – Подключение РМО-М к испытательному объектуИспытание сопротивления обмотки
Значение испытательного тока следует выбирать в соответствии с номинальным током обмотки. Информацию о номинальном токе обмотки можно найти на паспортной табличке испытуемого объекта. Испытательный ток не должен превышать 10% номинального тока обмотки. Из-за нагрева кабелей более высокие значения испытательного тока значительно увеличивают сопротивление обмотки.
Информацию о номинальном токе обмотки можно найти на паспортной табличке испытуемого объекта. Испытательный ток не должен превышать 10% номинального тока обмотки. Из-за нагрева кабелей более высокие значения испытательного тока значительно увеличивают сопротивление обмотки.
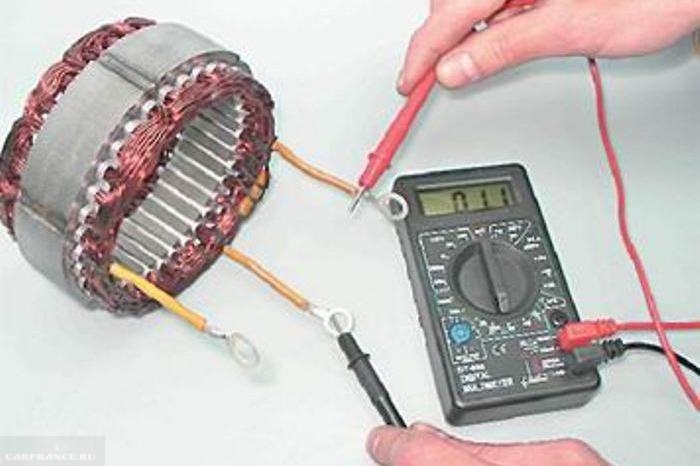
Сопротивление обмотки трехфазных двигателей переменного тока измеряется между их выводами (все три комбинации).
Рисунок 2 – Измерение сопротивления обмотки статора двигателя переменного тока Рисунок 3 – Подключение для измерения сопротивления обмотки статора асинхронного двигателя.Сопротивление обмотки ротора с контактным кольцом измеряется непосредственно на контактных кольцах (нелинейное переходное сопротивление щеток не входит в измеренное сопротивление обмотки).
Рисунок 4 – Измерение сопротивления обмотки ротора с контактным кольцом. Рисунок 5 – Меню результатов РМО-МРазряд двигателя после испытания сопротивления обмотки
Имейте в виду, что энергия все еще остается в магнитной цепи. После завершения измерения прибор РМО-М автоматически запустит текущий процесс разряда. Во время текущей разрядки на дисплее устройства отображается сообщение «РАЗРЯДКА».
После завершения измерения прибор РМО-М автоматически запустит текущий процесс разряда. Во время текущей разрядки на дисплее устройства отображается сообщение «РАЗРЯДКА».
Ни в коем случае нельзя снимать провода в процессе тестирования. Оператор всегда должен ждать окончания сигнала разгрузки и звукового сигнала зуммера. Это признак того, что проверенный двигатель был правильно разряжен.
Процесс подачи тока и отвода энергии регулируется полностью автоматически.Цепь безопасного разряда, оснащенная индикатором, быстро рассеивает накопленную магнитную энергию после завершения испытания.
ВНИМАНИЕ! : Измерительные провода не следует отсоединять до тех пор, пока с дисплея не исчезнет сообщение «Разрядка» и не погаснет светодиод разрядки.
После завершения всех испытаний измерительные провода отключаются в следующем порядке:
- щупы удалены из объекта испытаний
- щупы удалены из прибора.

Кабель сетевого напряжения отсоединяется сначала от источника питания, а затем от прибора. Наконец, заземляющий (PE) кабель отключается от прибора.
RMO50M и RMO100M
ДВ Омметры силовых обмоток РМО50М и РМО100М предназначены для измерения сопротивлений индуктивных объектов контроля, используемых в электроэнергетике и других отраслях промышленности.
Испытательный ток RMO50M находится в диапазоне от 5 мА до 50 А постоянного тока. Диапазон измерения от 0,1 мкОм до 1000 Ом.Обмоточный омметр RMO100M имеет возможность проверки с более высокими значениями испытательного тока. Испытательный ток RMO100M находится в диапазоне от 5 мА до 100 А постоянного тока, а диапазон измерения – от 1 мкОм до 1000 Ом.
Максимальный вход в канале измерения напряжения составляет 5 В для всех значений испытательного тока. Имея это в виду, оператор должен выбрать испытательный ток таким образом, чтобы при ожидаемом сопротивлении это значение напряжения не превышалось.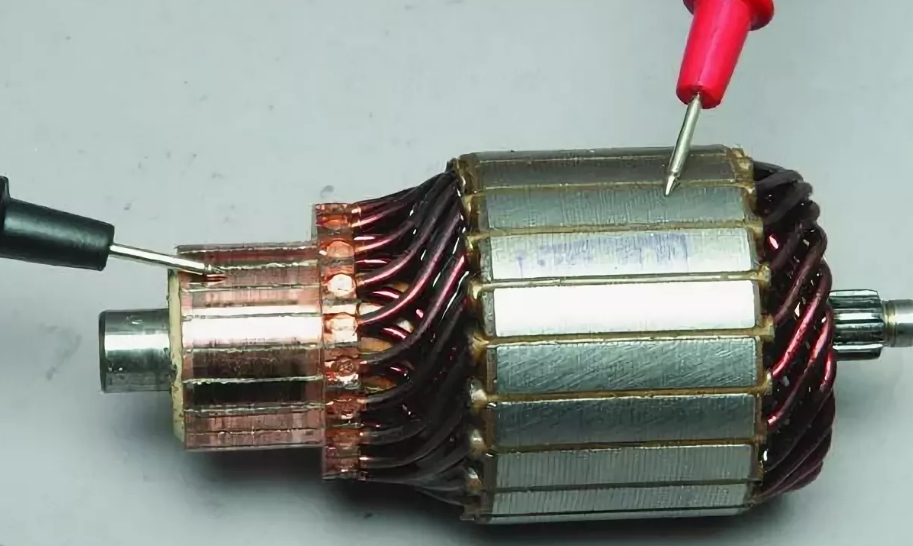 Например, если ожидаемое сопротивление при измерении будет около 100 мОм, значение испытательного тока должно быть ниже 50 А, потому что:
Например, если ожидаемое сопротивление при измерении будет около 100 мОм, значение испытательного тока должно быть ниже 50 А, потому что:
U = I ∙ R
5 В = 50 А ∙ 100 мОм
В противном случае на устройстве отображается сообщение об ошибке «Изменить ток».Это указывает на слишком высокое испытательное напряжение. В этом случае следует уменьшить испытательный ток и повторить испытание.
Это сообщение также отображается, если индуктивность тестового объекта слишком высока. Опять же, следует уменьшить испытательный ток и повторить испытание.
Чтобы загрузить эту статью в формате .pdf, войдите в систему и перейдите по следующей ссылке.
1 апреля 2020 г.
Сопротивление статора Заявки, запросы предложений и государственные контракты
Ротор генератора и статор
Сопротивление и изоляция обмоткиТип: Уведомление о торгах
Срок: 23 июля 2021 г. (2 месяца назад) 9 Отправлено: 3 месяца назад
(2 месяца назад) 9 Отправлено: 3 месяца назад
Начато: 02 июл, 2021 (3 месяца назад)
Запрос на услуги по выполнению работ по выполнению ротора и статора Сопротивление и изоляция обмотки Код обслуживания продукта: – J061 – ТЕХНИЧЕСКОЕ ОБСЛУЖИВАНИЕ / РЕМОНТ / ВОССТАНОВЛЕНИЕ ОБОРУДОВАНИЯ- ЭЛЕКТРОПРОВОД И РАСПРЕДЕЛИТЕЛЬНОЕ ОБОРУДОВАНИЕ Код НАИКС: – 811310 – Ремонт и техническое обслуживание коммерческих и промышленных машин и оборудования (кроме автомобильного и электронного) Основное контактное лицо: – Райан По Райан[email protected]
От: Федеральное правительство (Федеральное правительство)
Ротор генератора и статор
Сопротивление и изоляция обмоткиТип: Премия
Срок: 19 авг, 2021 (1 месяц назад)
Размещено: 2 месяца назад
Начато: 04 авг, 2021 (2 месяца назад)
Уведомление о награждении
Код обслуживания продукта: – J061 – ТЕХНИЧЕСКОЕ ОБСЛУЖИВАНИЕ / РЕМОНТ / ВОССТАНОВЛЕНИЕ ОБОРУДОВАНИЯ- ЭЛЕКТРОПРОВОД И РАСПРЕДЕЛИТЕЛЬНОЕ ОБОРУДОВАНИЕ
Код НАИКС: – 811310 – Ремонт и техническое обслуживание коммерческих и промышленных машин и оборудования (кроме автомобильного и электронного)
Основное контактное лицо: – Райан По
Райан.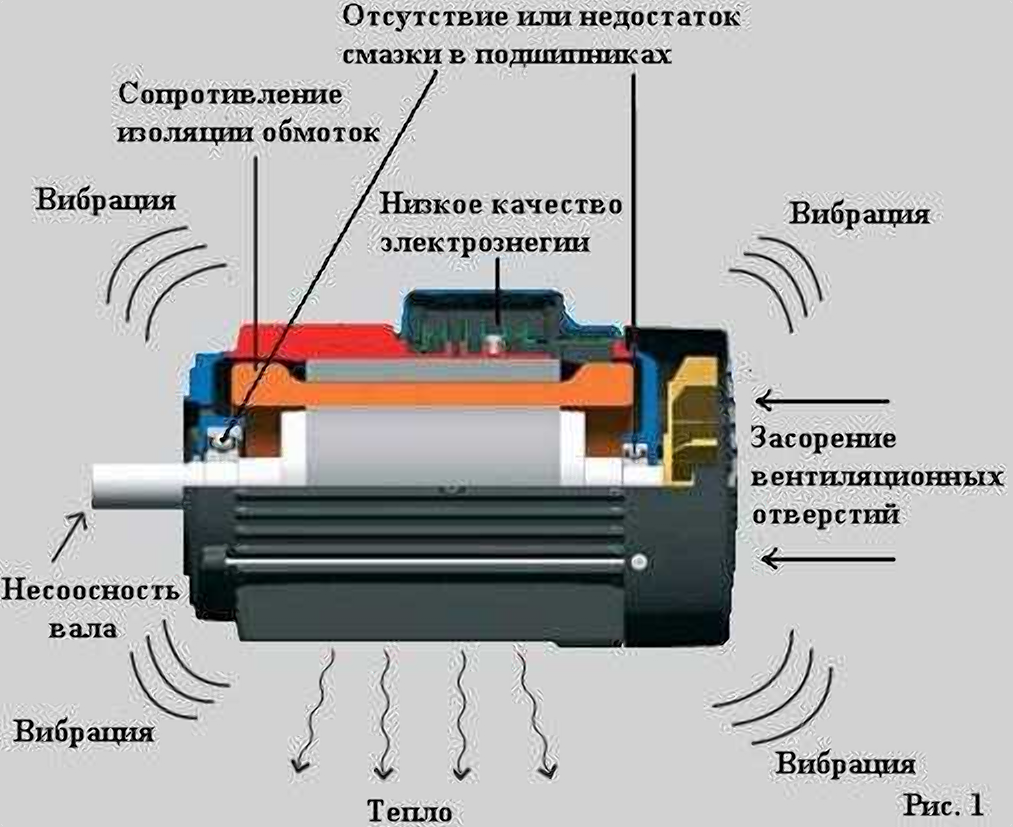 [email protected]
Номер телефона 7172679481
Дополнительное контактное лицо: –
[email protected]
Номер телефона 7172679481
Дополнительное контактное лицо: –
От: Федеральное правительство (Федеральное правительство)
John Day Main Unit 6 Ремонт генератора
Тип: Уведомление о торгах
Срок: 02 мая 2017 г. (около 4 лет назад)
Размещено: около 4 лет назад
Начато: 17 апр, 2017 (около 4 лет назад)
поврежден статор стержней с предоставленным государством статором стержнями; замена поврежденных соединений стержней на новые соединения, предоставленные Подрядчиком; замену статора Датчики температуры сопротивления (RTD) на поставляемые правительством RTD по мере необходимости и испытание обмотки статора ; очистка и проверка сердечника статора ; очистка, осмотр и тестирование ротора; поставка и установка полной системы анализатора частичных разрядов; проверка тяги
От: Федеральное правительство (Федеральное правительство)
Очистите, осмотрите и испытайте ротор и статор
Тип: Уведомление о торгах
Срок: 05 января 2018 г. 3 года назад)
3 года назад)
Размещено: около 3 лет назад
Начато: 04 янв, 2018 (около 3 лет назад)
Знания и опыт, которые, как ожидается, потребуются для выполнения этого контракта, включают, но не ограничиваясь, очисткой, осмотром и испытанием статора турбогенератора и ротора турбинного генератора с водяным насосом с использованием фирменных процедур ремонта OEM.Оцените состояние статора . Проведите испытание сердечника сердечника статора . Испытание для определения локальных повреждений под пазами катушки статора . Проведите испытание сопротивления изоляции ротора .
От: Федеральное правительство (Федеральное правительство)
61–
СТАТОР , ДВИГАТЕЛЬТип: Премия
Срок: 16 июля 2021 г. (2 месяца назад)
(2 месяца назад)
: 3 месяца назад
Начато: 01 июл, 2021 (3 месяца назад)
Код обслуживания продукта: – 61 – ELECTRIC WIRE, POWER DISTRIB EQPT Код НАИКС: – 335312 – Производство двигателей и генераторов Основное контактное лицо: – НАТАЛЬЯ РАДЫКДСН312-850-4033 Наталья[email protected] Дополнительное контактное лицо: –
От: Федеральное правительство (Федеральное правительство)
15 –
СТАТОР , СВЯЗЬТип: Премия
Срок: 10 августа 2021 г. (2 месяца назад)
Размещено: 2 месяца назад
Начато: 26 июл, 2021 (2 месяца назад)
Код обслуживания продукта: – 15 – АЭРОКОСМИЧЕСКИЕ МАШИНЫ И КОНСТРУКТИВНЫЕ КОМПОНЕНТЫ
Код НАИКС: – 336413 – Производство прочих запасных частей для самолетов и вспомогательного оборудования
Основное контактное лицо: – Эшли Корицер804-279-3328
Эшли. [email protected]
Дополнительное контактное лицо: –
[email protected]
Дополнительное контактное лицо: –
От: Федеральное правительство (Федеральное правительство)
Z1DA – Капитальный ремонт и испытания турбины 515
Тип: Уведомление о торгах
Срок сдачи: 26 мая 2021 г. (4 мес. назад)
Размещено: 5 мес. назад
Запущено: 05 Май, 2021 г. (5 месяцев назад)
Проверка контакта шестерен Потяните торцевые щитки генератора и проверьте концевые обмотки и ротор на месте Электрические проверки генератора ротор , статор и возбудитель.Откройте и осмотрите обратный клапан высокого давления. Бумажный чек на диске на место. Поднимите проверку на предмет зазоров втулки. PM проверяет регулятор Woodward и запускает поддержку тестирования статора . Коэффициент мощности, мегомметр, обмотка Сопротивление Тестирование ротора. Megger, Winding Resistance Бесщеточный возбудитель.
Коэффициент мощности, мегомметр, обмотка Сопротивление Тестирование ротора. Megger, Winding Resistance Бесщеточный возбудитель.
От: Федеральное правительство (Федеральное правительство)
КАПИТАЛЬНЫЙ РЕМОНТ ТУРБИНЫ / ГЕНЕРАТОРА КОМБИНИРОВАННОГО ОТОПЛЕНИЯ И ЭЛЕКТРОСТАНЦИИ
Тип: Уведомление о торгах
Срок сдачи: 9 месяцев назад 9 декабря 2020 г. Размещено: 9 месяцев назад
Начато: 17 дек, 2020 (9 месяцев назад)
Выполните проверку контакта шестерни
• Снимите торцевые щитки генератора и проверьте концевые обмотки и ротор на месте.
• Электрические проверки ротора генератора, статора , и возбудителя. • Откройте и осмотрите обратный клапан высокого давления. Бумажный чек на диске на место. Поднимите чек для
зазоры втулки.
• PM проверяет губернатора Woodward и оказывает поддержку при запуске
• Испытание статора . Коэффициент мощности, мегомметр, обмотка Сопротивление • Тестирование ротора. Megger, обмотка Сопротивление • Бесщеточный возбудитель.
• Откройте и осмотрите обратный клапан высокого давления. Бумажный чек на диске на место. Поднимите чек для
зазоры втулки.
• PM проверяет губернатора Woodward и оказывает поддержку при запуске
• Испытание статора . Коэффициент мощности, мегомметр, обмотка Сопротивление • Тестирование ротора. Megger, обмотка Сопротивление • Бесщеточный возбудитель.
От: Федеральное правительство (Федеральное правительство)
Установленный на прицепе Генератор 375 кВт DLA Distribution Susquehanna
Тип: Уведомление о торгах
Срок: 28 мая 2020 г. : 17 месяцев назад
Начато: 13 мая, 2020 (17 месяцев назад)
Испытание изоляции, поле генератора, якорь возбудителя, поле возбудителя, якорь генератора или статор Диэлектрические испытания, поле генератора, якорь возбудителя, поле возбудителя, якорь генератора или статор Все защитное отключение и автоматическое управление
Стандартное тестирование должно включать части MIL-STD-705, Методы:
301. 1b изоляция сопротивление тест
302.1 испытание с высоким потенциалом
401.1a обмотка сопротивление испытание
410.1a
1b изоляция сопротивление тест
302.1 испытание с высоким потенциалом
401.1a обмотка сопротивление испытание
410.1a
От: Федеральное правительство (Федеральное правительство)
MG Set # 1 Очистка генератора KATO Корабль NOAA Oscar Sette
Тип: Уведомление о торгах
Срок: 16 июня 2017 г. (около 4 лет назад)
Размещено: около 4 лет назад
Начато: 13 июня 2017 г. (около 4 лет назад)
• Тест – временно отсоедините все кабели от шин и выполните изоляцию сопротивления (мегомметр) Испытание генераторов , статора и вращающихся обмоток возбуждения с помощью мегомметра на 500 В постоянного тока. Отправьте отчет с показаниями Megger в COR.
• Осмотр – Визуально осмотрите ротор, изоляцию ротора, обмотки статора , изоляцию и клеммные соединения.
Отправьте отчет с показаниями Megger в COR.
• Осмотр – Визуально осмотрите ротор, изоляцию ротора, обмотки статора , изоляцию и клеммные соединения.
От: Федеральное правительство (Федеральное правительство)
Схема оценки сопротивления статора с использованием системы нечеткой логики для асинхронного двигателя с прямым управлением крутящим моментом
Тип статьи: Исследовательская статья
Авторы: Reza, C.M.F.S. | Islam, Didarul | Mekhilef, Saad
Место работы: Исследовательская лаборатория силовой электроники и возобновляемых источников энергии (PEARL), Департамент электротехники, Малайский университет, Куала-Лумпур, Малайзия
Примечание: [] Автор, отвечающий за переписку.Саад Мехилеф, Исследовательская лаборатория силовой электроники и возобновляемых источников энергии (PEARL), Департамент электротехники, Малайский университет, Куала-Лумпур, Малайзия. Тел .: +603 7967 6851; Факс: +603 7967 5316; Электронная почта: [адрес электронной почты защищен]
Аннотация: Приводы с асинхронным двигателем с прямым управлением крутящим моментом (DTC-IM) широко используются в течение последних нескольких десятилетий. Приводы DTC-IM используют сопротивление статора двигателя для оценки магнитного потока статора, которое напрямую зависит от сопротивления статора IM. Правильная оценка сопротивления статора очень важна, поскольку сопротивление статора изменяется из-за повышения температуры машины во время работы.В этой статье смоделирована и проверена онлайн-оценка сопротивления статора асинхронного двигателя с использованием эталонной адаптивной системы (MRAS) и нечеткой логики для привода с прямым управлением крутящим моментом. Ошибка между фактической переменной состояния машины и оценочным значением эталонной модели и скоростью изменения этой ошибки используется в качестве входных данных для нечеткой оценки, которая дает изменение значения сопротивления в качестве выходных данных. С помощью моделирования было доказано, что средство оценки может отслеживать значение сопротивления статора в течение 70 мс, когда применяется ступенчатое изменение сопротивления статора.Эффективность средства оценки исследуется при моделировании путем изменения сопротивления статора от номинального значения, что было сделано в MATLAB / SIMULINK.
Приводы DTC-IM используют сопротивление статора двигателя для оценки магнитного потока статора, которое напрямую зависит от сопротивления статора IM. Правильная оценка сопротивления статора очень важна, поскольку сопротивление статора изменяется из-за повышения температуры машины во время работы.В этой статье смоделирована и проверена онлайн-оценка сопротивления статора асинхронного двигателя с использованием эталонной адаптивной системы (MRAS) и нечеткой логики для привода с прямым управлением крутящим моментом. Ошибка между фактической переменной состояния машины и оценочным значением эталонной модели и скоростью изменения этой ошибки используется в качестве входных данных для нечеткой оценки, которая дает изменение значения сопротивления в качестве выходных данных. С помощью моделирования было доказано, что средство оценки может отслеживать значение сопротивления статора в течение 70 мс, когда применяется ступенчатое изменение сопротивления статора.Эффективность средства оценки исследуется при моделировании путем изменения сопротивления статора от номинального значения, что было сделано в MATLAB / SIMULINK.
Ключевые слова: прямое управление крутящим моментом, асинхронный двигатель, сопротивление статора, MRAS, нечеткая логика
DOI: 10.3233 / IFS-141129
Journal: Journal of Intelligent & Fuzzy Systems, vol. 27, нет. 4, pp. 1631-1638, 2014
Оценка сопротивления статора и магнитной связи ротора в SPMSM с использованием CLPSO со стратегией обучения на основе оппозиции
Электромагнитные параметры важны для проектирования контроллера и мониторинга состояния синхронной машины с постоянными магнитами (PMSM) система.В этой статье предлагается улучшенная комплексная оптимизация роя частиц с обучением (CLPSO) со стратегией обучения на основе противодействия (OBL) для оценки сопротивления статора и магнитной связи ротора в PMSM поверхностного монтажа; Предлагаемый метод именуется CLPSO-OBL. В рамках CLPSO-OBL стратегия обучения с противовесом используется для обучения с подкреплением лучшими частицами, чтобы улучшить динамические характеристики и способность глобальной конвергенции CLPSO. Предлагаемая оптимизация параметров не только сохраняет преимущества разнообразия в CLPSO, но также унаследовала возможность глобального исследования OBL.Затем предложенный метод применяется для оценки сопротивления статора и потокосцепления ротора навесного ПМСМ. Результаты экспериментов показывают, что CLPSO-OBL имеет лучшие характеристики при оценке сопротивления обмотки и потока PM по сравнению с существующими аналогами PSO. Кроме того, предлагаемая модель оценки параметров и метод оптимизации просты и имеют хорошую точность, быструю сходимость и легкую цифровую реализацию.
Предлагаемая оптимизация параметров не только сохраняет преимущества разнообразия в CLPSO, но также унаследовала возможность глобального исследования OBL.Затем предложенный метод применяется для оценки сопротивления статора и потокосцепления ротора навесного ПМСМ. Результаты экспериментов показывают, что CLPSO-OBL имеет лучшие характеристики при оценке сопротивления обмотки и потока PM по сравнению с существующими аналогами PSO. Кроме того, предлагаемая модель оценки параметров и метод оптимизации просты и имеют хорошую точность, быструю сходимость и легкую цифровую реализацию.
1. Введение
В последние годы синхронные машины с постоянными магнитами (PMSM) широко применяются в промышленных системах сервоуправления и системах генерации энергии из возобновляемых источников [1–3], поскольку они обладают превосходством в высокой плотности мощности и отклике крутящего момента. , высокая эффективность и т. д.Это необходимо для точного получения параметров PMSM для помощи в проектировании контроллера, регулировании скорости и мониторинге состояния в реальной системе промышленного привода [4]. В частности, наиболее важные физические параметры, такие как сопротивление статора и потокосцепление PM ротора, являются индикаторами состояния системы. Например, сопротивление статора можно рассматривать как индикатор температуры статора из-за термического КПД металла, поскольку срок службы машины будет нарушен, если температура превысит свой критический диапазон.Размагничивание в PM будет влиять на характеристики выходного электромагнитного крутящего момента машины [5]. Однако PMSM представляет собой типичную нелинейную изменяющуюся во времени динамическую систему, физические параметры которой легко чувствительны к изменениям окружающей среды, таким как шум и температура. Таким образом, технологии оценки сопротивления обмотки и потокосцепления ротора PMSM стали важной задачей для управления машинами [6]. Существующая литература в основном сосредоточена на онлайн-оценке и алгоритмах, включая расширенный фильтр Калмана (EKF) [6, 7], эталонную адаптивную систему модели (MRAS) [8, 9], рекурсивные методы наименьших квадратов (RLS) [10, 11] и нейронные сети (НС) [12] широко используются.
В частности, наиболее важные физические параметры, такие как сопротивление статора и потокосцепление PM ротора, являются индикаторами состояния системы. Например, сопротивление статора можно рассматривать как индикатор температуры статора из-за термического КПД металла, поскольку срок службы машины будет нарушен, если температура превысит свой критический диапазон.Размагничивание в PM будет влиять на характеристики выходного электромагнитного крутящего момента машины [5]. Однако PMSM представляет собой типичную нелинейную изменяющуюся во времени динамическую систему, физические параметры которой легко чувствительны к изменениям окружающей среды, таким как шум и температура. Таким образом, технологии оценки сопротивления обмотки и потокосцепления ротора PMSM стали важной задачей для управления машинами [6]. Существующая литература в основном сосредоточена на онлайн-оценке и алгоритмах, включая расширенный фильтр Калмана (EKF) [6, 7], эталонную адаптивную систему модели (MRAS) [8, 9], рекурсивные методы наименьших квадратов (RLS) [10, 11] и нейронные сети (НС) [12] широко используются. Однако вышеупомянутые методы обладают некоторыми недостатками, такими как сходимость ошибок, нестабильность и высокие вычислительные затраты в процессе оценки PMSM.
Однако вышеупомянутые методы обладают некоторыми недостатками, такими как сходимость ошибок, нестабильность и высокие вычислительные затраты в процессе оценки PMSM.
В последнее время, вдохновленные биологическими вычислениями, некоторые исследователи пытаются использовать методы эволюционных вычислений для оценки параметров PMSM, поскольку эволюционные алгоритмы имеют возможность получить подходящий набор значений параметров путем оптимизации целевой функции между системной моделью и фактическими. . Оптимизация роя частиц (PSO) недавно была представлена как привлекательный метод оптимизации при идентификации системы и успешно применяется при оценке параметров PMSM [2, 5, 13–15] благодаря своей простой реализации, небольшим параметрам управления, разнонаправленному поиску и быстрая сходимость.Поскольку базовый PSO легко попадает в локальные минимумы при решении сложной нелинейной задачи идентификации параметров PMSM, некоторые усовершенствованные операторы вводятся в PSO и производят новый гибридный PSO для разработки средства оценки параметров PMSM. Например, оценка параметров на основе коэволюции путем комбинирования PSO нескольких популяций и алгоритма искусственного иммунитета была исследована для повышения эффективности многопараметрической оценки PMSM [2]. Для повышения эффективности идентификации параметров представлена параллельная реализация с использованием иммуно-кооперативного алгоритма оптимизации роя частиц с динамическим обучением (PSO) с архитектурой многоядерных вычислений для оценок параметров PMSM [5]; Другой метод графического процессора (GPU), ускоренный параллельным коэволюционным иммунным PSO, был разработан для оценки параметров и мониторинга температуры PMSM [15], для которого эффективность оценки параметров была значительно улучшена этими новыми методами PSO.
Например, оценка параметров на основе коэволюции путем комбинирования PSO нескольких популяций и алгоритма искусственного иммунитета была исследована для повышения эффективности многопараметрической оценки PMSM [2]. Для повышения эффективности идентификации параметров представлена параллельная реализация с использованием иммуно-кооперативного алгоритма оптимизации роя частиц с динамическим обучением (PSO) с архитектурой многоядерных вычислений для оценок параметров PMSM [5]; Другой метод графического процессора (GPU), ускоренный параллельным коэволюционным иммунным PSO, был разработан для оценки параметров и мониторинга температуры PMSM [15], для которого эффективность оценки параметров была значительно улучшена этими новыми методами PSO.
В этой статье, для того чтобы эффективно оценить сопротивление статора и потокосцепление ротора поверхностного PMSM, оценка параметров PMSM преобразуется в задачу оптимизации, а затем в новую комплексную оптимизацию роя частиц с обучением (CLPSO) с противодействием: Предлагается стратегия обучения для изучения оптимального параметра, предложенный метод оптимизации параметров называется CLPSO-OBL. CLPSO был впервые предложен Liang et al. [16], где все направления полета индивидуумов обновляются случайно выбранной частицей всей популяции в процессе итерации, и он превосходит по разнообразию, сохраняемому для решения задачи мультимодальной оптимизации.Чтобы улучшить глобальную конвергенцию CLPSO, для обучения частиц Pbest используется стратегия обучения на основе оппозиции (OBL), которая помогает ему выйти за пределы локальных оптимумов. OBL – это стратегия обучения с подкреплением, в которой одновременно используются вычисления и счетчики, которые можно использовать для ускорения сходимости других эволюционных алгоритмов [17]. Наконец, предлагаемый CLPSO-OBL применяется для оценки сопротивления статора и потокосцепления ротора PMSM открытого монтажа.Испытания показывают, что предлагаемый метод позволяет одновременно точно оценить сопротивление статора и производительность потокосцепления ротора намного лучше, чем существующие улучшенные гибридные PSO.
CLPSO был впервые предложен Liang et al. [16], где все направления полета индивидуумов обновляются случайно выбранной частицей всей популяции в процессе итерации, и он превосходит по разнообразию, сохраняемому для решения задачи мультимодальной оптимизации.Чтобы улучшить глобальную конвергенцию CLPSO, для обучения частиц Pbest используется стратегия обучения на основе оппозиции (OBL), которая помогает ему выйти за пределы локальных оптимумов. OBL – это стратегия обучения с подкреплением, в которой одновременно используются вычисления и счетчики, которые можно использовать для ускорения сходимости других эволюционных алгоритмов [17]. Наконец, предлагаемый CLPSO-OBL применяется для оценки сопротивления статора и потокосцепления ротора PMSM открытого монтажа.Испытания показывают, что предлагаемый метод позволяет одновременно точно оценить сопротивление статора и производительность потокосцепления ротора намного лучше, чем существующие улучшенные гибридные PSO.
Данная статья имеет следующую структуру. Модель оценки для идентификации сопротивления статора и потокосцепления ротора PMSM описана в разделе 2. Алгоритм CLPSO-OBL предлагается в разделе 3, где описываются процедура и шаги оптимизации. Результаты экспериментов и анализ приведены в разделе 4.Наконец, некоторые выводы и будущая работа представлены в Разделе 5.
Модель оценки для идентификации сопротивления статора и потокосцепления ротора PMSM описана в разделе 2. Алгоритм CLPSO-OBL предлагается в разделе 3, где описываются процедура и шаги оптимизации. Результаты экспериментов и анализ приведены в разделе 4.Наконец, некоторые выводы и будущая работа представлены в Разделе 5.
2. Модель PMSM и дизайн модели оценки параметров
2.1. PMSM, модель
Для оценки параметров PMSM используются уравнения напряжения оси машины: где,,, и – электрическая угловая скорость, напряжение статора на оси и ток, а набор параметров – обмотка сопротивление , индуктивности -оси и потокосцепление ротора PM соответственно, где для SPMSM .Уравнение (1) может быть дискретизировано следующим образом, когда машина находится в установившемся режиме: В реальном применении индуктивность по оси относится к медленно меняющимся параметрам в определенном диапазоне по сравнению с сопротивлением статора и потокосцеплением PM ротора, поэтому она может считаться постоянными и фиксированными на измеренных значениях в процессе оценки параметров. Вектор параметров неизвестен и должен быть идентифицирован в этом исследовании. Оценка параметров сформулирована как задача оптимизации системы путем оптимизации спроектированной целевой функции в этом исследовании.Функция пригодности определяется как несоответствие между выходными данными модели и измеренными фактическими выходными данными системы. Оценка параметров может быть решена как задача оптимизации через оптимизирующую целевую функцию. Модель оценки параметров PMSM показана на рисунке 1. Из рисунка 1 путем сравнения выходных данных модели и фактических выходных данных целевая функция (3) для оценки сопротивления обмотки и потокосцепления ротора рассчитывается следующим образом: где символ «» означает что они рассчитаны напряжения по оценочным параметрам и измеренному значению.Фактические значения машинных параметров могут быть получены, если спроектированная целевая функция минимизирована предложенным CLPSO-OBL. Фактически, целевая функция (3) представляет собой задачу оптимизации нелинейной многомерной функции и имеет много локальных точек, поскольку относится к реальной двигательной системе, системные переменные которой легко изменить.
Вектор параметров неизвестен и должен быть идентифицирован в этом исследовании. Оценка параметров сформулирована как задача оптимизации системы путем оптимизации спроектированной целевой функции в этом исследовании.Функция пригодности определяется как несоответствие между выходными данными модели и измеренными фактическими выходными данными системы. Оценка параметров может быть решена как задача оптимизации через оптимизирующую целевую функцию. Модель оценки параметров PMSM показана на рисунке 1. Из рисунка 1 путем сравнения выходных данных модели и фактических выходных данных целевая функция (3) для оценки сопротивления обмотки и потокосцепления ротора рассчитывается следующим образом: где символ «» означает что они рассчитаны напряжения по оценочным параметрам и измеренному значению.Фактические значения машинных параметров могут быть получены, если спроектированная целевая функция минимизирована предложенным CLPSO-OBL. Фактически, целевая функция (3) представляет собой задачу оптимизации нелинейной многомерной функции и имеет много локальных точек, поскольку относится к реальной двигательной системе, системные переменные которой легко изменить.
3. Предлагаемый улучшенный CLPSO с использованием OBL
3.1. Принцип базового алгоритма PSO
Вдохновленный разумным поведением птиц, рой частиц должен найти лучшее решение.Предполагая, что в -мерном пространстве решений каждая частица состоит из вектора скорости и вектора положения, скорость и положение th частицы изменяются, как указано в, где представляет собой наилучшее положение, найденное этой частицей до настоящего момента, и является лучшей частицей. среди всего населения. и – коэффициенты ускорения, – весовой коэффициент инерции, и – равномерно распределенные числа, генерируемые случайным образом.
3.2. Принцип базового алгоритма CLPSO
CLPSO был впервые представлен Liang et al.для решения многомодельных задач [16]. Механизм поиска CLPSO заключается в том, что вектор скорости любой частицы может быть выбран для обновления скорости частицы, которая должна быть изменена в соответствии с рассчитанной вероятностью обучения среди роя. Эта стратегия модификации может эффективно избежать потери разнообразия конвергенции для популяции в процессе поиска. Модификации скорости и положения th-частицы в CLPSO указаны в том месте, где определено, от какой частицы должна учиться th частица, и может быть соответствующее значение любого размера частицы или может быть ее саморегулирующимся значением, которое определяется вероятностями обучения, детали как в [16].Основные идеи таковы: если случайное число больше, это измерение будет учиться на собственном Pbest частицы; в противном случае он узнает от других частиц ‘ Pbest . У существующего алгоритма CLPSO есть один недостаток; то есть, как только группа попадает в локальный оптимум, поисковое поведение всего роя легко приобретет сходство среди всей популяции, поскольку не существует эффективного механизма, гарантирующего выход из локальных оптимумов.
Эта стратегия модификации может эффективно избежать потери разнообразия конвергенции для популяции в процессе поиска. Модификации скорости и положения th-частицы в CLPSO указаны в том месте, где определено, от какой частицы должна учиться th частица, и может быть соответствующее значение любого размера частицы или может быть ее саморегулирующимся значением, которое определяется вероятностями обучения, детали как в [16].Основные идеи таковы: если случайное число больше, это измерение будет учиться на собственном Pbest частицы; в противном случае он узнает от других частиц ‘ Pbest . У существующего алгоритма CLPSO есть один недостаток; то есть, как только группа попадает в локальный оптимум, поисковое поведение всего роя легко приобретет сходство среди всей популяции, поскольку не существует эффективного механизма, гарантирующего выход из локальных оптимумов.
3.3. OBL для
Pbest’s Learning Позиции Pbest используются в качестве образцов для определения направления полета всей популяции, поэтому статус поиска Pbest частиц важен для CLPSO. Для повышения эффективности глобальной конвергенции частиц Pbest в CLPSO вводится стратегия OBL. OBL – это метод машинного обучения, подробно описанный Rahnamayan et al. [17], который представляет собой простой метод, позволяющий алгоритмам на основе популяции одновременно искать оптимальную точку в противоположном направлении и текущий поиск. Основная идея состоит в том, что, когда решение используется в определенном направлении, оно выполняет поиск в противоположном направлении одновременно, поскольку задано где – действительное число в интервале, а – противоположное число.Это определение также можно распространить на многомерное пространство. В -мерном пространстве, где и, точка может быть определена как Техника машинного обучения OBL применяется в CLPSO и выполняет противоположное обучение для частиц Pbest, как указано в После вышеуказанной модификации, оцените значение пригодности (оппозиция) и обновите как . Предлагаемый оператор обучения OBL может помочь частицам Pbest выпрыгнуть из локальных оптимумов и получить производительность глобальной сходимости в CLPSO.
Для повышения эффективности глобальной конвергенции частиц Pbest в CLPSO вводится стратегия OBL. OBL – это метод машинного обучения, подробно описанный Rahnamayan et al. [17], который представляет собой простой метод, позволяющий алгоритмам на основе популяции одновременно искать оптимальную точку в противоположном направлении и текущий поиск. Основная идея состоит в том, что, когда решение используется в определенном направлении, оно выполняет поиск в противоположном направлении одновременно, поскольку задано где – действительное число в интервале, а – противоположное число.Это определение также можно распространить на многомерное пространство. В -мерном пространстве, где и, точка может быть определена как Техника машинного обучения OBL применяется в CLPSO и выполняет противоположное обучение для частиц Pbest, как указано в После вышеуказанной модификации, оцените значение пригодности (оппозиция) и обновите как . Предлагаемый оператор обучения OBL может помочь частицам Pbest выпрыгнуть из локальных оптимумов и получить производительность глобальной сходимости в CLPSO.
4. Экспериментальная проверка
Предлагаемая оценка проверена экспериментами в этом разделе. Система векторного управления на основе цифрового сигнального процесса (DSP) и схематическая диаграмма процесса тестирования показаны на рисунке 2. Процедура автономной оценки с использованием CLPSO-OBL показана на рисунке 3. Конструктивные параметры используемого прототипа машины подробно описаны как следующие: номинальная скорость (400 об / мин), номинальный ток (4 А), напряжение промежуточного контура (36 В), номинальное сопротивление клеммного провода (0.043), номинальная самоиндукция (2,91 мГн), номинальная взаимная индуктивность (-0,330 мГн), номинальная индуктивность по оси (3,24 мГн), номинальная индуктивность по оси (3,24 мГн), номинальная амплитуда магнитного потока, индуцированного магнитами (77,6 мВт) , количество пар полюсов, номинальное сопротивление фазы (° C) (0,330 Ом) и инерцию (кгм 2 ).
фиксируется на одном из наших предварительных расчетных значений [18] (в этой исследовательской литературе установлено значение 3,97 (мВтб) при нормальной температуре и 3,76 (мВтб) при температуре нагрева).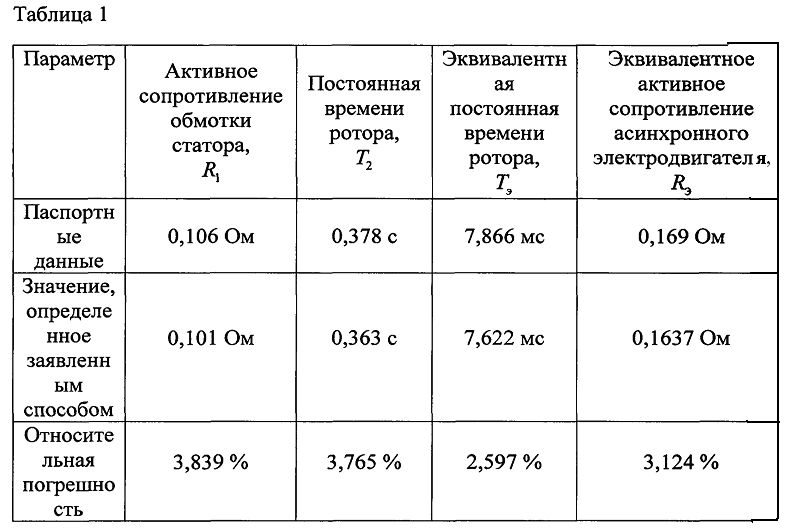 Как показано на рисунке 3, оценка параметра PMSM включает в себя измерение данных, моделирование оценки параметров и процедуру оптимизации параметров модели. Для сравнения разработанная модель оценки параметров PMSM также тестируется другими существующими PSO, такими как гибридный метод PSO с вейвлет-мутацией (HPSOWM) [19], метод комплексного обучения PSO (CLPSO) [16], улучшенный комплексный обучающий PSO ( A-CLPSO) [20] и метод адаптивной оптимизации роя частиц (APSO) [21].Базовые настройки этих PSO следующие: размер популяции – 50, максимальное поколение – 300, количество прогонов – 30. Все протестированные PSO используют одни и те же данные измерений и работают на одной и той же программной платформе. Все эксперименты проводятся на одном и том же главном компьютере с аппаратной конфигурацией Intel®-core ™ -i5-2450M и 4,0 ГБ оперативной памяти DDR3.
Как показано на рисунке 3, оценка параметра PMSM включает в себя измерение данных, моделирование оценки параметров и процедуру оптимизации параметров модели. Для сравнения разработанная модель оценки параметров PMSM также тестируется другими существующими PSO, такими как гибридный метод PSO с вейвлет-мутацией (HPSOWM) [19], метод комплексного обучения PSO (CLPSO) [16], улучшенный комплексный обучающий PSO ( A-CLPSO) [20] и метод адаптивной оптимизации роя частиц (APSO) [21].Базовые настройки этих PSO следующие: размер популяции – 50, максимальное поколение – 300, количество прогонов – 30. Все протестированные PSO используют одни и те же данные измерений и работают на одной и той же программной платформе. Все эксперименты проводятся на одном и том же главном компьютере с аппаратной конфигурацией Intel®-core ™ -i5-2450M и 4,0 ГБ оперативной памяти DDR3.
Эксперименты проводятся в двух различных рабочих условиях, включая нормальную температуру и температурные колебания.
При нормальных температурных условиях сходимость различных PSO показана на рисунке 4, экспериментальные результаты представлены в таблице 1, а построенная кривая двух параметров для различных PSO показана на рисунке 5. Из таблицы 1 и рисунка 3 видно, что CLPSO-OBL показывает лучшие характеристики с точки зрения среднего значения, стандартных отклонений и значений t по сравнению с существующими одноранговыми гибридными PSO (т. Е. HPSOWM, CLPSO, A-CLPSO и APSO). . Кроме того, скорость сходимости CLPSO-OBL выше, чем у других гибридных PSO, как показано на рисунке 4.
Из таблицы 1 и рисунка 3 видно, что CLPSO-OBL показывает лучшие характеристики с точки зрения среднего значения, стандартных отклонений и значений t по сравнению с существующими одноранговыми гибридными PSO (т. Е. HPSOWM, CLPSO, A-CLPSO и APSO). . Кроме того, скорость сходимости CLPSO-OBL выше, чем у других гибридных PSO, как показано на рисунке 4.
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 85
85(a) Расчетное сопротивление статора
(b) Расчетное сопротивление потокосцепления PM ротора
(a) сопротивление
(b) Расчетная потокосцепление PM ротора
Очевидно, что оптимальность, сходимость и алгоритмическая эффективность CLPSO улучшаются благодаря оператору OBL, который улучшил глобальную конвергенцию CLPSO и вытолкнул его из местная точка.Как видно из таблицы 1, расчетное сопротивление обмотки (0,334 Ом) с помощью CLPSO-OBL полностью совпадает с его номинальным значением (0,33 Ом) при нормальных температурных условиях. Кроме того, расчетная потокосцепление (79,16 мВтб) по CLPSO-OBL довольно близко к его номинальному значению (77,6 мВтб). Небольшая разница между расчетным и номинальным значениями параметров машины может быть вызвана нелинейностью режима работы машины.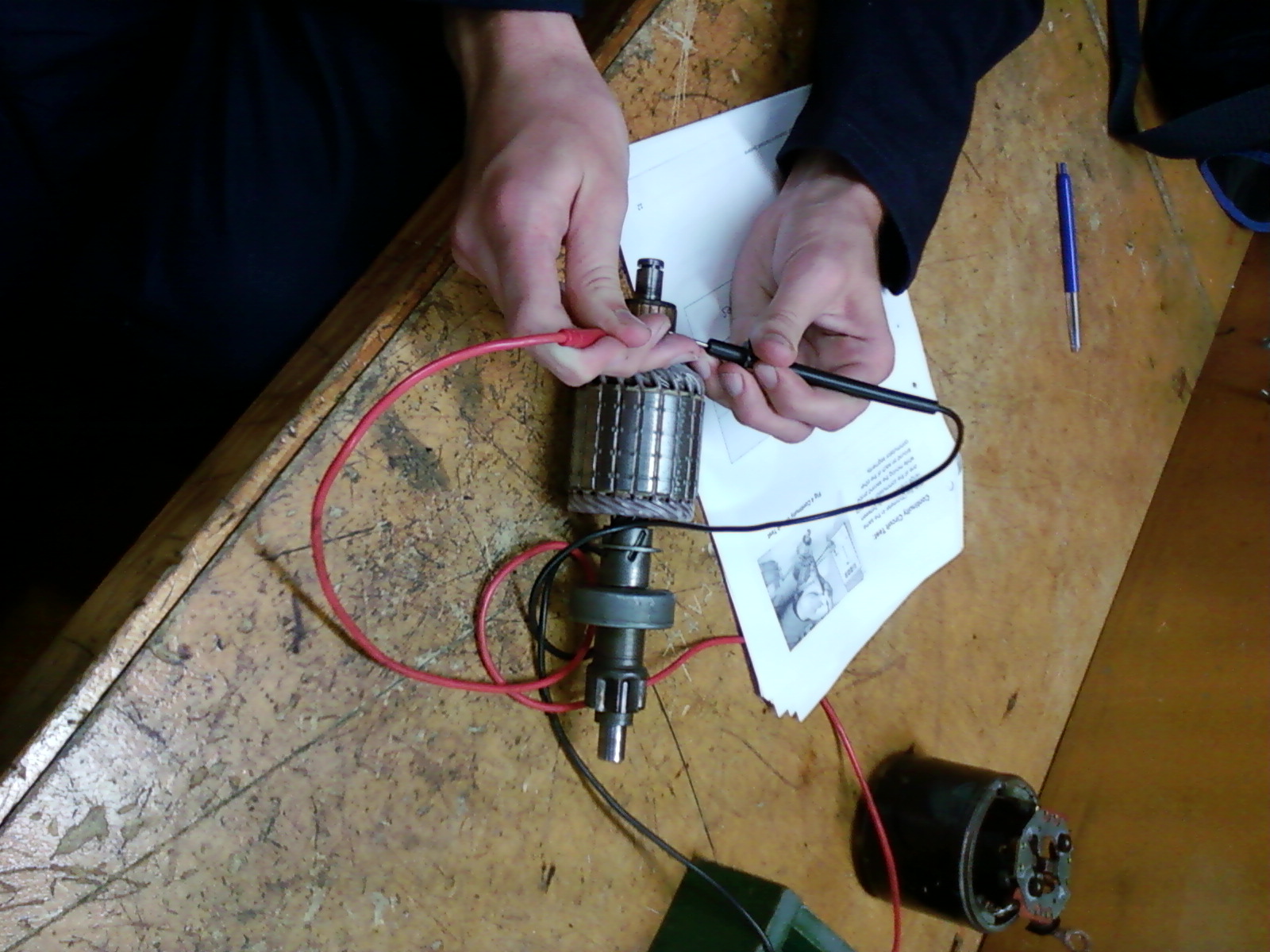
Параметры PMSM легко изменяются в зависимости от температуры окружающей среды.Чтобы проверить производительность предложенного метода и можно ли отслеживать изменение параметров при изменении температурных условий, нагреватель используется для нагрева прототипа PMSM в течение 20 минут, а затем для измерения данных для экспериментальных испытаний. Идентифицированные результаты условий эксплуатации при изменении температуры перечислены в таблице 2, а сравнение с различными PSO показано на рисунках 6 и 7, соответственно. Из таблицы 2 видно, что CLPSO-OBL превосходит другие одноранговые PSO по среднему значению, стандартному отклонению и значениям -test .Из рисунка 5 можно заметить, что CLPSO-OBL имеет более высокую скорость сходимости, чем другие гибридные PSO.
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 454
454(a) Расчетное сопротивление статора
(b) Расчетное потокосцепление PM ротора
Результаты анализа показывают, что расчетное сопротивление обмотки и потокосцепление ротора изменяются с изменением температурный режим.Например, расчетное значение сопротивления обмотки увеличивается с 0,334 (Ом) до 0,454 (Ом) при нагреве в течение 20 минут при высокой температуре. Это явление указывает на то, что значение сопротивления металла увеличивается с повышением температуры из-за термического КПД металла. Расчетная потокосцепление ротора уменьшается с 79,16 (мВтб) до 76,9 (мВтб), резкое падение расчетной потокосцепления ротора после 20-минутного нагрева. Это явление указывает на то, что плотность магнитного поля уменьшается с повышением температуры.Эти результаты показывают, что предлагаемый модуль оценки параметров может одновременно отслеживать сопротивление статора и потокосцепление PM ротора PMSM.
5. Заключение
Сопротивление статора и потокосцепление с постоянными магнитами ротора важны для проектирования контроллера и мониторинга состояния системы синхронной машины с постоянными магнитами (PMSM). В этом исследовании предлагается улучшенная стратегия CLPSO со стратегией OBL для оценки сопротивления статора и потока PM ротора в PMSM поверхностного монтажа. В представленной структуре алгоритма стратегия OBL используется для обучения с подкреплением частиц Pbest , чтобы улучшить динамические характеристики и возможности глобальной оптимизации CLPSO. Предлагаемый метод не только сохраняет преимущества разнообразия в CLPSO, но также унаследовал глобальные исследовательские возможности OBL. Наконец, предложенный метод был успешно применен для оценки сопротивления статора и потокосцепления РМ ротора SPMSM. Результаты экспериментов показывают, что CLPSO-OBL обладает лучшими характеристиками при оценке сопротивления обмотки и магнитной связи РМ ротора по сравнению с существующими гибридными PSO. Кроме того, предлагаемый метод позволяет эффективно отслеживать изменение параметров машины при изменении условий работы.Более того, предлагаемая модель оценки параметров проста, имеет быструю сходимость и легкую цифровую реализацию. Таким образом, предложенный метод может быть использован для контроля состояния обмотки статора и потокосцепления роторных ПМ ПМСМ. С увеличением промышленного спроса в реальном времени мы будем выполнять его на программируемой вентильной матрице (FPGA), и в будущем управление производительностью PMSM в реальном времени будет значительно улучшено.
Предлагаемый метод не только сохраняет преимущества разнообразия в CLPSO, но также унаследовал глобальные исследовательские возможности OBL. Наконец, предложенный метод был успешно применен для оценки сопротивления статора и потокосцепления РМ ротора SPMSM. Результаты экспериментов показывают, что CLPSO-OBL обладает лучшими характеристиками при оценке сопротивления обмотки и магнитной связи РМ ротора по сравнению с существующими гибридными PSO. Кроме того, предлагаемый метод позволяет эффективно отслеживать изменение параметров машины при изменении условий работы.Более того, предлагаемая модель оценки параметров проста, имеет быструю сходимость и легкую цифровую реализацию. Таким образом, предложенный метод может быть использован для контроля состояния обмотки статора и потокосцепления роторных ПМ ПМСМ. С увеличением промышленного спроса в реальном времени мы будем выполнять его на программируемой вентильной матрице (FPGA), и в будущем управление производительностью PMSM в реальном времени будет значительно улучшено.
