
Технические характеристики асинхронных двигателей | Официальный сайт компании “АС и ПП”
Технические характеристики асинхронных двигателей
Технические характеристики электродвигателей:
- Мощность от 0,18 до 11 кВт;
- Напряжение питания – любое до 1000 В;
- Двигатели пригодны для эксплуатации в условиях климатических исполнений: У2, У1, УХЛ2, УХЛ1, Т2, Т1 по ГОСТ 15150.
- Номинальные значения климатических факторов внешней среды по ГОСТ 15543.1 (п.2; 5 ¸14) и ГОСТ 15150 (п.1¸4), при этом
- высота над уровнем моря не более 1200 м;
- запылённость воздуха не более 1,3 г/м3;
- окружающая среда не взрывоопасна, не содержит токопроводящей пыли, не содержит паров веществ, вредно влияющих на изоляцию.
- Степень защиты двигателей – IP 55 и IP54 по ГОСТ 17494.
- Двигатели могут быть оборудованы встроенной температурной защитой.
- Группа механического воздействия по стойкости к воздействию механических внешних воздействующих факторов – М3 по ГОСТ 17516.

- Способ охлаждения двигателей IC0141 по ГОСТ 20459 (п.6).
- Изоляция маслостойкая класса нагревостойкости F (155оС) или Н (180оС) по ГОСТ 8865 (п.1¸5).
- Режим работы – продолжительный S1 и повторно-кратковременный S3 по ГОСТ 183. Повторно-кратковременный режим работы с ПВ от 0 % до 50 %. Допускается работа с ПВ от 50 % до 100 % в течение двух часов, но не чаще одного раза за 3 часа эксплуатации. Среднее количество пусков электродвигателя не более 30 в час. Количеством пусков в течение суток не более 200. Суммарное количество пусков в течение года не более 30000.
- Двигатели при рабочей температуре выдерживают в течение 2 мин без повреждений и видимых остаточных деформаций повышение частоты вращения до 120% номинальной.
- Двигатели выдерживают стоянку под током короткого замыкания после установившегося номинального режима работы при номинальном напряжении не менее 10 с.
- Изоляция обмотки статора относительно корпуса и между обмотками выдерживает в течение 1 минуты испытательное напряжение 2500 В частоты 50 Гц.

- Изоляция обмотки статора между смежными ее витками выдерживает в режиме холостого хода в течение 5 минут испытательное напряжение выше номинального значения на 50% с увеличенной частотой напряжения питания на 20%.
- Двигатели выдерживают 50% перегрузку по току в течение 2 минут.
- Двигатели, начиная с высоты вращения 80, имеют приспособления для подъема и транспортирования.
- Двигатели имеют коробку выводов с двумя сальниковыми вводами, допускающую возможность поворота на 180º с целью подвода кабелей с двух сторон.
- По способу защиты человека от поражения электрическим током двигатели имеют класс 1 по ГОСТ 12.2.007.0. В части пожаробезопасности двигатели соответствуют требованиям ГОСТ 12.1.004. Вероятность возникновения пожара не превышает 10-6 в год.
Технические характеристики двигателей серии АДЭМ
Технические характеристики трехфазных асинхронных двигателей с короткозамкнутым ротором производства ОАО “ВЭМЗ”
Технические характеристики двигателей основного исполнения, степень защиты IP54, класс нагревостойкости изоляции «F», 2р=12; n=500 об/мин
| Тип двигателя | Ном. мощ мощность, кВт | Ном. частота враще ния, об/мин | КПД, % | Коэф. мощ ности | Ном. ток при 380 В, А | Ном. момент, Нм | Мпуск/ Мном | Iпуск/ Iном | Ммакс/ Мном | Дина мический момент инерции ротора, кг*м2 | Масса, кг |
| 5АМ315S12e | 45 | 490 | 93,0 | 0,79 | 93,2 | 876 | 1,8 | 5,6 | 2,0 | 5,97 | 888 |
| 5АМ315МА12e | 55 | 490 | 93,0 | 0,79 | 114 | 1071 | 1,8 | 5,6 | 2,0 | 6,78 | 927 |
| 5АМ315МВ12 | 75 | 490 | 92,2 | 0,8 | 155 | 1460 | 1,6 | 5,3 | 2,0 | 6,78 | 975 |
Технические характеристики двигателей основного исполнения, степень защиты IP54, класс нагревостойкости изоляции «F», 2р=10; n=600 об/мин
| Тип двигателя | Ном. мощ мощность, кВт | Ном. частота враще ния, об/мин | КПД, % | Коэф. мощ ности | Ном. ток при 380 В, А | Ном. момент, Нм | Мпуск/ Мном | Iпуск/ Iном | Ммакс/ Мном | Дина мический момент инерции ротора, кг*м2 | Масса, кг |
| 5АМ280S10e | 37 | 590 | 93 | 0,79 | 76,6 | 598 | 6,5 | 2,5 | 3,14 | 710 | |
| 5АМ280М10e | 45 | 590 | 93,5 | 0,8 | 91,6 | 728 | 1,5 | 6,5 | 2,5 | 4,07 | 760 |
| 5АМ315S10e | 55 | 590 | 93,5 | 0,82 | 109 | 890 | 1,6 | 6,5 | 2,2 | 5,97 | 885 |
| 5АМ315МА10e | 75 | 590 | 93,5 | 0,85 | 143 | 1213 | 1,9 | 6,1 | 2,2 | 6,78 | 927 |
| 5АМ315МВ10 | 90 | 590 | 93,0 | 0,81 | 182 | 1456 | 2,1 | 5,8 | 2,2 | 6,78 | 975 |
Технические характеристики двигателей основного исполнения, степень защиты IP54, класс нагревостойкости изоляции «F», 2р=8; n=750 об/мин
| Тип двигателя | Ном. мощ мощность, кВт | Ном. частота враще ния, об/мин | КПД, % | Коэф. мощности | Ном. ток при 380 В, А | Ном. момент, Нм | Мпуск/ Мном | Iпуск/ Iном | Ммакс/ Мном | Дина мический момент инерции ротора, кг*м2 | Масса, кг |
| 5А80МА8 | 0,37 | 695 | 56 | 0,62 | 1,6 | 5,1 | 2,0 | 3,5 | 2,2 | 0,0036 | 13,5 |
| 5А80МВ8 | 0,55 | 700 | 58 | 0,6 | 2,4 | 7,5 | 2,0 | 3,5 | 2,2 | 0,0047 | 15,7 |
| 5АМ112МА8 | 2,2 | 79 | 0,7 | 6,0 | 29 | 2,0 | 4,8 | 2,5 | 0,024 | 50 | |
| 5АМ112МВ8 | 3,0 | 710 | 79 | 0,7 | 8,3 | 40 | 2,2 | 4,6 | 2,5 | 0,029 | 54,5 |
| АИРМ132S8 | 4,0 | 715 | 82 | 0,7 | 10,6 | 53,4 | 2,0 | 4,8 | 2,5 | 0,053 | 68,5 |
| АИРМ132M8 | 5,5 | 715 | 83 | 0,73 | 13,8 | 73,4 | 2,0 | 5,3 | 2,5 | 0,074 | 82 |
| 5А160S8 | 7,5 | 725 | 86 | 0,72 | 18,4 | 99 | 1,6 | 5,0 | 2,2 | 0,11 | 120 |
| 5А160М8 | 11 | 725 | 87 | 0,74 | 26 | 145 | 1,6 | 5,0 | 2,2 | 0,15 | 145 |
| АИР180М8 | 15 | 730 | 88 | 0,78 | 33 | 196 | 1,6 | 5,3 | 2,2 | 0,27 | 180 |
| 5А200М8 | 18,5 | 735 | 90 | 0,76 | 41,0 | 240 | 2,0 | 6,4 | 2,7 | 0,41 | 240 |
| 5А200L8 | 22 | 735 | 90 | 0,77 | 48,5 | 286 | 2,0 | 6,2 | 2,6 | 0,46 | 260 |
| 5А225М8 | 30 | 735 | 91 | 0,78 | 64,5 | 389 | 2,1 | 5,5 | 2,2 | 0,70 | 340 |
| 5АМ250S8 | 37 | 740 | 92 | 0,73 | 84,0 | 477 | 1,8 | 6,5 | 2,6 | 1,20 | 430 |
| 5АМ250М8 | 45 | 740 | 93 | 0,75 | 98,0 | 580 | 1,8 | 6,8 | 2,6 | 1,40 | 460 |
| 5АМ280S8e | 55 | 740 | 93,6 | 0,83 | 108 | 709 | 1,9 | 5,9 | 2,0 | 3,29 | 705 |
| 5АМ280М8e | 75 | 740 | 94,0 | 0,82 | 148 | 967 | 2,0 | 6,0 | 2,1 | 4,00 | 790 |
| 5АМ315S8e | 90 | 740 | 94,5 | 0,85 | 170 | 1161 | 1,4 | 6,0 | 2,1 | 5,21 | 965 |
| 5АМ315МА8e | 110 | 740 | 94,5 | 0,86 | 206 | 1419 | 1,4 | 5,9 | 2,1 | 6,03 | 1,1 |
| 5АМ315МВ8e | 132 | 740 | 94,5 | 0,84 | 253 | 1702 | 1,7 | 6,5 | 2,3 | 1130 | – |
Технические характеристики двигателей основного исполнения, степень защиты IP54, класс нагревостойкости изоляции «F», 2р=6; n=1000 об/мин
| Тип двигателя | Ном. мощ мощность, кВт | Ном. частота враще ния, об/мин | КПД, % | Коэф. мощности | Ном. ток при 380 В, А | Ном. момент, Нм | Мпуск/ Мном | Iпуск/ Iном | Ммакс/ Мном | Дина мический момент инерции ротора, кг*м2 | Масса, кг |
| 5А80МА6 | 0,75 | 930 | 70,0 | 0,68 | 2,4 | 7,7 | 2,0 | 4,5 | 2,3 | 0,0033 | 14 |
| 5А80МВ6 | 1,1 | 930 | 71,0 | 0,69 | 3,4 | 11,3 | 2,0 | 4,5 | 2,3 | 0,0048 | 16 |
| 5АМ112МА6 | 3 | 950 | 81,0 | 0,8 | 7,0 | 30 | 2,3 | 5,5 | 2,6 | 0,024 | 50,5 |
| 5АМ112МВ6 | 4 | 955 | 82,0 | 0,81 | 9,2 | 40 | 2,3 | 5,5 | 2,6 | 0,029 | 55 |
| АИРМ132S6 | 5,5 | 960 | 84,5 | 0,8 | 12,4 | 54,7 | 2,0 | 5,8 | 2,5 | 0,048 | 68,5 |
| АИРМ132M6 | 7,5 | 960 | 85,5 | 0,8 | 16,7 | 74,6 | 2,2 | 6,3 | 2,8 | 0,067 | 81,5 |
| 5А160S6 | 11 | 970 | 87,0 | 0,82 | 23,4 | 108 | 1,9 | 6,5 | 2,5 | 0,11 | 122 |
| 5А160М6 | 15 | 970 | 88,5 | 0,83 | 31,0 | 148 | 2,0 | 6,8 | 2,7 | 0,15 | 150 |
| АИР180М6 | 18,5 | 980 | 89,5 | 0,84 | 37,5 | 180 | 1,9 | 6,5 | 2,7 | 0,27 | 180 |
| 5А200М6 | 22 | 975 | 90,5 | 0,83 | 44,5 | 215 | 2,2 | 6,0 | 2,2 | 0,41 | 245 |
| 5А200L6 | 30 | 975 | 90,5 | 0,84 | 60,0 | 294 | 2,4 | 6,0 | 2,2 | 0,46 | 280 |
| 5А225М6 | 37 | 980 | 91,5 | 0,84 | 73,0 | 360 | 2,3 | 6,2 | 2,5 | 0,65 | 330 |
| 5АМ250S6 | 45 | 985 | 93,0 | 0,84 | 87,5 | 436 | 2,0 | 6,2 | 2,0 | 1,20 | 430 |
| 5АМ250М6 | 55 | 985 | 92,5 | 0,84 | 108 | 533 | 2,0 | 6,2 | 2,0 | 1,30 | 450 |
| 5АМ280S6e | 75 | 990 | 94,5 | 0,85 | 142 | 723 | 1,9 | 6,2 | 2,0 | 3,04 | 720 |
| 5АМ280М6e | 90 | 990 | 94,5 | 0,85 | 171 | 868 | 1,9 | 6,2 | 2,2 | 3,25 | 780 |
| 5АМ315S6e | 110 | 990 | 94,8 | 0,88 | 201 | 1060 | 1,8 | 6,9 | 2,6 | 4,54 | 913 |
| 5АМ315МА6e | 132 | 990 | 95,0 | 0,9 | 235 | 1273 | 1,6 | 6,6 | 2,4 | 5,13 | 1010 |
| 5АМ315МВ6e | 160 | 990 | 95,1 | 0,89 | 288 | 1543 | 2,0 | 7,5 | 2,4 | 5,88 | 1090 |
Технические характеристики двигателей основного исполнения, степень защиты IP54, класс нагревостойкости изоляции «F», 2р=4; n=1500 об/мин
| Тип двигателя | Ном. мощ мощность, кВт | Ном. частота враще ния, об/мин | КПД, % | Коэф. мощности | Ном. ток при 380 В, А | Ном. момент, Нм | Мпуск/ Мном | Iпуск/ Iном | Ммакс/ Мном | Дина мический момент инерции ротора, кг*м2 | Масса, кг |
| 5А80МА6 | 0,75 | 930 | 70,0 | 0,68 | 2,4 | 7,7 | 2,0 | 4,5 | 2,3 | 0,0033 | 14 |
| 5А80МВ6 | 1,1 | 930 | 71,0 | 0,69 | 3,4 | 11,3 | 2,0 | 4,5 | 2,3 | 0,0048 | 16 |
| 5АМ112МА6 | 3 | 950 | 81,0 | 0,8 | 7,0 | 30 | 2,3 | 5,5 | 2,6 | 0,024 | 50,5 |
| 5АМ112МВ6 | 4 | 955 | 82,0 | 0,81 | 9,2 | 40 | 2,3 | 5,5 | 2,6 | 0,029 | 55 |
| АИРМ132S6 | 5,5 | 960 | 84,5 | 0,8 | 12,4 | 54,7 | 2,0 | 5,8 | 2,5 | 0,048 | 68,5 |
| АИРМ132M6 | 7,5 | 960 | 85,5 | 0,8 | 16,7 | 74,6 | 2,2 | 6,3 | 2,8 | 0,067 | 81,5 |
| 5А160S6 | 11 | 970 | 87,0 | 0,82 | 23,4 | 108 | 1,9 | 6,5 | 2,5 | 0,11 | 122 |
| 5А160М6 | 15 | 970 | 88,5 | 0,83 | 31,0 | 148 | 2,0 | 6,8 | 2,7 | 0,15 | 150 |
| АИР180М6 | 18,5 | 980 | 89,5 | 0,84 | 37,5 | 180 | 1,9 | 6,5 | 2,7 | 0,27 | 180 |
| 5А200М6 | 22 | 975 | 90,5 | 0,83 | 44,5 | 215 | 2,2 | 6,0 | 2,2 | 0,41 | 245 |
| 5А200L6 | 30 | 975 | 90,5 | 0,84 | 60,0 | 294 | 2,4 | 6,0 | 2,2 | 0,46 | 280 |
| 5А225М6 | 37 | 980 | 91,5 | 0,84 | 73,0 | 360 | 2,3 | 6,2 | 2,5 | 0,65 | 330 |
| 5АМ250S6 | 45 | 985 | 93,0 | 0,84 | 87,5 | 436 | 2,0 | 6,2 | 2,0 | 1,20 | 430 |
| 5АМ250М6 | 55 | 985 | 92,5 | 0,84 | 108 | 533 | 2,0 | 6,2 | 2,0 | 1,30 | 450 |
| 5АМ280S6e | 75 | 990 | 94,5 | 0,85 | 142 | 723 | 1,9 | 6,2 | 2,0 | 3,04 | 720 |
| 5АМ280М6e | 90 | 990 | 94,5 | 0,85 | 171 | 868 | 1,9 | 6,2 | 2,2 | 3,25 | 780 |
| 5АМ315S6e | 110 | 990 | 94,8 | 0,88 | 201 | 1060 | 1,8 | 6,9 | 2,6 | 4,54 | 913 |
| 5АМ315МА6e | 132 | 990 | 95,0 | 0,9 | 235 | 1273 | 1,6 | 6,6 | 2,4 | 5,13 | 1010 |
| 5АМ315МВ6e | 160 | 990 | 95,1 | 0,89 | 288 | 1543 | 2,0 | 7,5 | 2,4 | 5,88 | 1090 |
Технические характеристики двигателей основного исполнения, степень защиты IP54, класс нагревостойкости изоляции «F», 2р=2; n=3000 об/мин
| Тип двигателя | Ном. мощ мощность, кВт | Ном. частота враще ния, об/мин | КПД, % | Коэф. мощности | Ном. ток при 380 В, А | Ном. момент, Нм | Мпуск/ Мном | Iпуск/ Iном | Ммакс/ Мном | Дина мический момент инерции ротора, кг*м2 | Масса, кг |
| 5А80МА2 | 1,5 | 2850 | 80,0 | 0,84 | 3,4 | 5,0 | 2,4 | 6,5 | 2,5 | 0,0018 | 14,0 |
| 5А80МВ2 | 2,2 | 2850 | 81,0 | 0,85 | 4,9 | 7,4 | 2,7 | 6,5 | 2,8 | 0,0021 | 15,5 |
| 5АМ112М2 | 7,5 | 2895 | 87,5 | 0,89 | 14,6 | 24,7 | 2,9 | 7,5 | 3,3 | 0,0131 | 56,5 |
| АИРМ132М2 | 11 | 2915 | 88,5 | 0,9 | 21,0 | 36 | 2,5 | 8,0 | 3,3 | 0,024 | 77,5 |
| 5А160S2 | 15 | 2920 | 90,0 | 0,89 | 28,5 | 49 | 2,2 | 6,8 | 3,0 | 0,039 | 122 |
| 5А160М2 | 18,5 | 2920 | 90,5 | 0,89 | 34,9 | 60,5 | 2,2 | 7,0 | 3,0 | 0,045 | 133 |
| АИР180S2 | 22 | 2930 | 90,5 | 0,89 | 41,5 | 72 | 2,0 | 6,8 | 2,9 | 0,063 | 160 |
| АИР180М2 | 30 | 2940 | 91,5 | 0,89 | 56,3 | 97 | 2,4 | 8,0 | 3,3 | 0,076 | 180 |
| 5А200М2 | 37 | 2940 | 93,0 | 0,9 | 67,0 | 120 | 2,3 | 7,4 | 3,0 | 0,13 | 235 |
| 5А200L2 | 45 | 2940 | 93,4 | 0,9 | 81,5 | 146 | 2,4 | 7,4 | 3,0 | 0,15 | 255 |
| 5А225М2 | 55 | 2950 | 93,4 | 0,91 | 98,5 | 178 | 2,3 | 7,5 | 2,8 | 0,21 | 340 |
| 5АМ250S2 | 75 | 2960 | 93,6 | 0,92 | 133 | 242 | 2,0 | 7,5 | 3,0 | 0,47 | 475 |
| 5АМ250М2 | 90 | 2955 | 93,5 | 0,93 | 157 | 290 | 1,8 | 7,0 | 2,7 | 0,52 | 505 |
| 5АМ280S2 | 110 | 2965 | 93,5 | 0,92 | 195 | 354 | 1,6 | 6,5 | 2,3 | 0,85 | 685 |
| 5АМ280М2 | 132 | 2965 | 94,5 | 0,92 | 232 | 425 | 1,8 | 7,2 | 2,5 | 1,02 | 770 |
| 5АМ315S2 | 160 | 2970 | 94,0 | 0,93 | 278 | 515 | 1,7 | 7,0 | 2,5 | 1,42 | 970 |
| 5АМ315МА2 | 200 | 2970 | 95,0 | 0,93 | 344 | 643 | 1,8 | 8,0 | 2,7 | 1,78 | 1110 |
| 5АМ315МВ2 | 250 | 2975 | 95,7 | 0,93 | 427 | 802 | 2,0 | 8,5 | 2,7 | 2,05 | 1190 |
Общие характеристики электродвигателей ВЭМЗ
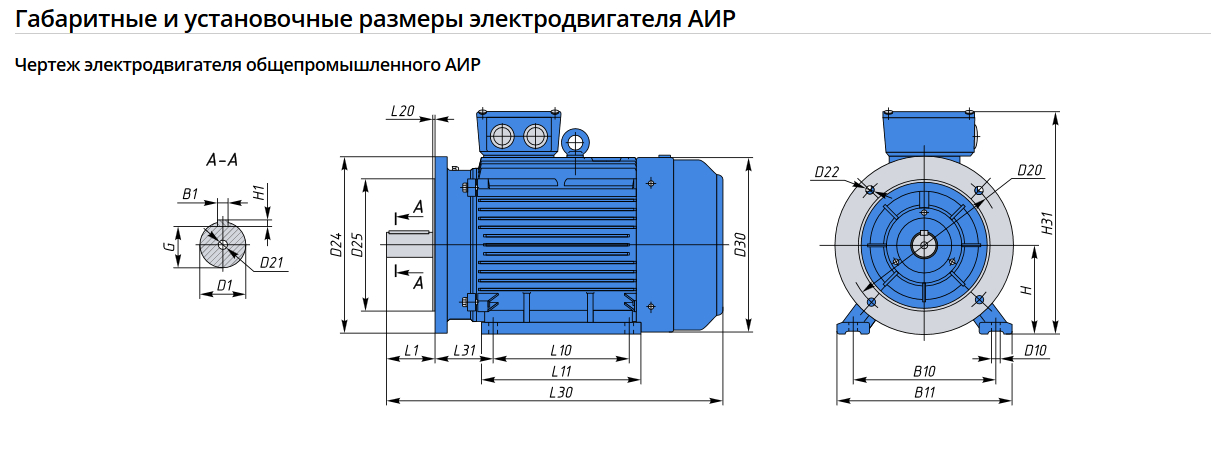
Присоединительные размеры и чертежи электродвигателей ВЭМЗ
Технические характеристики электродвигателей
В данном разделе представлены электродвигатели российских производителей и производителей стран СНГ.
Характеристики асинхронных электродвигателей трехфазного тока
На рис. 10.7 и 10.8 показаны механические характеристики электродвигателей постоянного тока. На рис. 10.7 момент М = = М (со) изменяется линейно, а на рис. 10.8 — по более сложному закону. Кривые Р = Р (ш) имеют параболический характер. На рис. 10.9 показана механическая характеристика водяной турбины. Все механические характеристики вида М = УИ (со) для машин-двигателей, показанные на рис. 10.7—10.9, являются нисходящими кривыми. На рис. 10.10 показаны механические характеристики асинхронного электродвигателя трехфазного тока. Эти характеристики имеют как нисходящий, так и восходящий участки кривой. [c.211]ДИНАМИЧЕСКАЯ ХАРАКТЕРИСТИКА АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ ТРЕХФАЗНОГО ТОКА [c.18]
Рис. 404. Механические характеристики асинхронного электродвигателя трехфазного тока в виде зависимости момента ротора от угловой скорости и в виде зависимости мощности от угловой скорости.
|
Наибольшее применение получили асинхронные электродвигатели трехфазного тока с короткозамкнутым ротором. Они имеют простую конструкцию, надежны в эксплуатации и не нуждаются в пусковом реостате. Основными характеристиками этих двигателей являются напряжение тока, номинальная мощность, крутящий момент, число оборотов, пусковые и тормозные свойства и допустимая частота включений. [c.200]
[c.200]
Линейные электродвигатели. Линейный электродвигатель (рис. 2.11) переменного трехфазного тока (ЛЭД) используется в качестве тягового двигателя и движителя, на подвесных однорельсовых дорогах пока еще в ограниченном количестве. В подвесных рельсовых дорогах первичную обмотку (статор )/ размещают на подвижном экипаже, а реактивную шину (ротор) 2 закрепляют на рельсе. В подвесных конвейерных поездах или длинных грузовых поездах подвесной дороги первичную обмотку (статор) можно расположить неподвижно на участках пути (на расстоянии не больше длины поезда), а реактивную шину — на подвижном составе. Более распространено расположение статора на подвижном составе, который в данном случае должен иметь контактное или автономное питание электроэнергией трехфазного переменного тока. Электрическая схема ЛЭД повторяет схему асинхронного электродвигателя трехфазного переменного тока с коротко-замкнутым ротором.
 Это относится и к скоростной его характеристике (см. рис. 2.11, 6). ЛЭД имеет более низкий КПД и os ф, чем обычный электродвигатель, что является результатом неблагоприятного продольного краевого эс х )екта при непрерывном входе— выходе движущегося индуктора и повышенного воздушного зазора между статором и ротором двигателя. Материалом шины служит стальная или алюминиевая полоса (предпочтительней применение алюминиевой полосы). Силу тяги и скорость движения регулируют изменением частоты и напряжения питающего ЛЭД тока.
[c.28]
Это относится и к скоростной его характеристике (см. рис. 2.11, 6). ЛЭД имеет более низкий КПД и os ф, чем обычный электродвигатель, что является результатом неблагоприятного продольного краевого эс х )екта при непрерывном входе— выходе движущегося индуктора и повышенного воздушного зазора между статором и ротором двигателя. Материалом шины служит стальная или алюминиевая полоса (предпочтительней применение алюминиевой полосы). Силу тяги и скорость движения регулируют изменением частоты и напряжения питающего ЛЭД тока.
[c.28]Формула (49) является приближенной, так как нагрев электродвигателя пропорционален не развиваемому им моменту, а потребляемому току. Между тем прямой пропорциональности между током и моментом нет ни у асинхронных двигателей трехфазного тока, ни у двигателей с последовательным возбуждением постоянного тока. При практических расчетах обычно пренебрегают этой неточностью. В расчете повышенной точности следует по характеристикам двигателей установить величину силы тока при данном моменте и при использовании формулы (49) применять не вели-
[c. 203]
203]
Для асинхронных электродвигателей так же, как и для двигателей постоянного тока, различают естественные и искусственные механические характеристики. Асинхронный электродвигатель работает по естественной механической характеристике в том случае, если его статорная обмотка включена в сеть трехфазного тока, напряжение и частота тока которой соответствуют номинальным значениям, и в цепи ротора отсутствуют какие-либо дополнительные сопротивления. [c.168]
Необходимо отметить, что формула,(32) является приближенной, так как нагрев электродвигателя пропорционален не развиваемому моменту, а потребляемому току. Прямой пропорциональности между момен-Гом и током нет ни у асинхронных двигателей трехфазного тока, ни у двигателей постоянного тока с последовательным возбуждением. Однако при- практических расчетах этой неточностью обычно пренебрегают. В случае же необходимости в повышенной точности расчета по характеристикам двигателей следует установить величину тока при данно>1 момент и применять формулу (32), подставив в нее вместо значений моментов соответствующие значения тока, полученные по характеристикам двигателей, приведенных в каталогах. [c.206]
[c.206]
Общая характеристика. Трехфазные асинхронные электродвигатели являются наиболее распространенными в промышленности благодаря наиболее простой конструкции, минимальной стоимости и минимальной потребности в уходе по сравнению с любыми другими электрическими двигателями, возможности их включения в трехфазную сеть переменного тока без промежуточных преобразователей и рентабельности асинхронных двигателей при малых мощностях (по сравнению с синхронными двигателями). [c.393]
Лабораторные работы измерение потерь напряжения в линии, сборка трехпроводной цепи трехфазного тока, измерение и регулирование нагрузки в ней измерения сопротивления изоляции мегаомметром осветительной установки, электродвигателя поверка индукционного счетчика измерение мощности в цепи постоянного и трехфазного тока градуировка термоэлектрического пирометра и, применение его для измерения температур, электродвигатель с параллельным возбуждением, однофазный трансформатор, его холостой ход, короткое замыкание, КПД трехфазный асинхронный электродвигатель, его пуск и рабочие характеристики полупроводниковые выпрямители, электронный осциллограф. [c.344]
[c.344]
Сварочные преобразователи с асинхронным электродвигателем в настоящее время являются основным видом преобразователей для получения постоянного сварочного тока. Основные характеристики современных сварочных преобразователей приведены в табл. 33. Все указанные преобразователи однокорпусные, имеют привод от трехфазных асинхронных электродвигателей с питанием от сети 380 или 220 в. [c.108]
Для подвесного рельсового транспорта асинхронный электродвигатель особенно ценен тем, что его масса и габаритные размеры по сравнению с другими электродвигателями невелики, а отсутствие коллектора или контактных колец уменьшает эксплуатационные расходы и повышает надежность работы. Двигатель способен работать в тяговом и генераторных режимах и в границах допускаемой тепловой нагрузки может работать во всех четырех квадрантах его характеристики (тяга, рекуперативное торможение, торможение при вращении в обратном направлении и тяга при движении в обратном направлении). Недостатком двигателя является большой пусковой ток, что ограничивает число включений в 1 ч при обычных схемах управления. Синхронная частота вращения двухполюсной машины при питании от сети промышленной частоты тока 50 Гц достигает 3000 6б/мин. На рис. 2.8, а показана скоростная характеристика трехфазного асинхронного электродвигателя с короткозамкнутым ротором, имеющего повышенное скольжение, а на рис. 2.8, б — кривая для определения его мощности N при разных режимах работы ПВ, %.
[c.24]
Недостатком двигателя является большой пусковой ток, что ограничивает число включений в 1 ч при обычных схемах управления. Синхронная частота вращения двухполюсной машины при питании от сети промышленной частоты тока 50 Гц достигает 3000 6б/мин. На рис. 2.8, а показана скоростная характеристика трехфазного асинхронного электродвигателя с короткозамкнутым ротором, имеющего повышенное скольжение, а на рис. 2.8, б — кривая для определения его мощности N при разных режимах работы ПВ, %.
[c.24]
Преобразователь такого типа ПСГ-350 состоит из сварочного генератора постоянного тока ГСГ-350 и трехфазного асинхронного электродвигателя АВ-61—2 мощностью 14 кВт. Генератор имеет обмотку независимого возбуждения и подмагничивающую последовательную обмотку. Обмотка независимого возбуждения питается от внешней сети через селеновые выпрямители и стабилизатор, который исключает влияние колебания напряжения в сети на ток возбуждения. Последовательная обмотка разделена на две секции при включении в сварочную цепь части витков генератор работает в режиме жесткой характеристики, а при использовании всех витков обмотки генератор дает возрастающую внешнюю характеристику. Генератор и двигатель размещены в общем корпусе и смонтированы на тележке.
[c.74]
Генератор и двигатель размещены в общем корпусе и смонтированы на тележке.
[c.74]
У всех электродвигателей, кроме синхронных, момент зависит от скорости вращения ротора. Зависимость Мд (Лд) называется статической механической характеристикой двигателя. На рис. 8.13 изображен примерный вид зависимости Мд (о>д) для наиболее распространенного трехфазного асинхронного двигателя с коротко-замкнутым ротором А и для двигателя постоянного тока с параллельным возбуждением Ш. [c.273]
Преобразователь ПСГ-500-1 выпускается в однокорпусном исполнении и состоит из генератора постоянного тока ГСГ-500-1 и трехфазного асинхронного двигателя А-71/2. Якорь генератора л ротор электродвигателя насажены на один вал. Сварочный генератор четырехполюсный с независимым возбуждением. Генератор имеет независимую и последовательную обмотки возбуждения. Жесткая внешняя характеристика создается за счет подмагничивания последовательной обмотки возбуждения.
[c. 43]
43]
На рис. 299 показана механическая характеристика асинхронного электродвигателя трехфазного тока. Механическая характеристика Мд = -Мд( ) асинхронного электродвигателя состоит из двух частей первая — восходящая, неустойчивая — часть Оа расположена левее Мтах вторая — устойчивая — часть аЬ — правее. Часть аЬ — рабочая. При некотором значении угловой скорости со, соответствующей номинальному моменту М двигателя и номинальной скорости Шн двигатель развивает максимальную мощность. Угловую скорость СОс, при которой Мд = О, называют синхронной с этой скоростью ротор вращается при холостом ходе. Точка а диаграммы определяет положение максимального опрокидываюихего момента Мщах и минимально допустимой угловой скорости (Omin рабочей части характеристики, а точка О определяет начальный пусковой момент Mq при нулевой угловой скорости ротора. Условия работы электродвигателей при низких скоростях вращения значительно ухудшаются. [c.205]
Наиболее компактными, простыми по конструкции и надежными в эксплуатации являются трехфазные асинхронные электродвигатели переменного тока.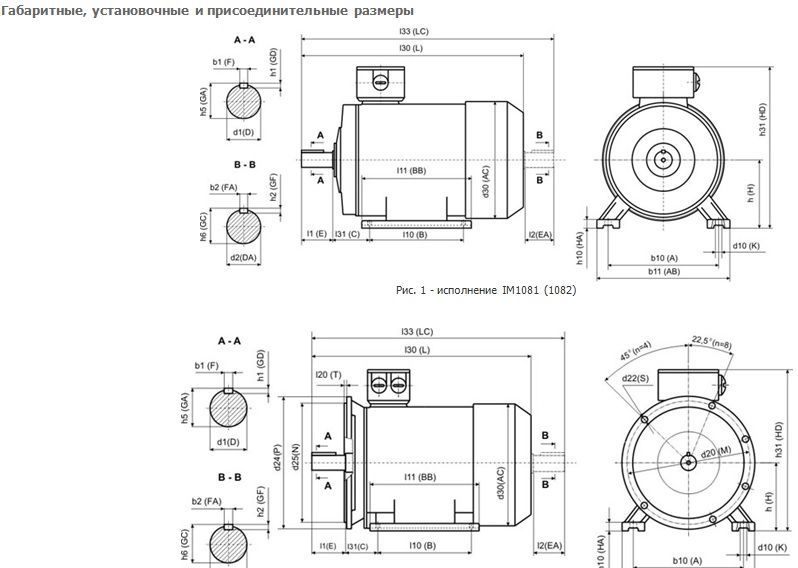 В СССР в настоящее время асинхронные электродвигатели изготовляют единой серии 4А. По степеням защиты электродвигатели делятся на закрытые обдуваемые и защищенные. Электродвигатели основного исполнения предназначе1 ы для работы в приводах, к которым не предъявляют особых требований к пусковым характеристикам, скольжению, энергетическим показателям и др. Они работают безотказно при температуре окружающего воздуха от —40 до -Ь40°С и относительной его влажности до 98% при температуре -1-25°С.
[c.191]
В СССР в настоящее время асинхронные электродвигатели изготовляют единой серии 4А. По степеням защиты электродвигатели делятся на закрытые обдуваемые и защищенные. Электродвигатели основного исполнения предназначе1 ы для работы в приводах, к которым не предъявляют особых требований к пусковым характеристикам, скольжению, энергетическим показателям и др. Они работают безотказно при температуре окружающего воздуха от —40 до -Ь40°С и относительной его влажности до 98% при температуре -1-25°С.
[c.191]
При скорости движения кабины до 1 м/сек применяются трехфазные асинхронные электродвигатели переменного тока. До последнего времени использовались крановые электродвигатели или электродвигатели общего применения как с контактными кольцами, так и с короткозамкнутым ротором. В настоящее время для лифтов применяются односкоростные короткозамкнутые электродвигатели единой серии в горизонтальном исполнении, с ротором повышенного скольжения, а также специальные лифтовые двухскоростные электродвигатели с отношением скоростей 4 1. Последние выполнены по специальному техническому заданию для условий работы в лифтовой установке и имеют соответствующие этим условиям характеристики. При ограниченной мощности питающей сети, когда короткозамкнугый электродвигатель не может быть применен, допускается установка электродвигателя с контактными кольцами. Номенклатура, основные технические данные и область применения электродвигателей для лифтов нормального ряда приведены в табл. 36—38.
[c.390]
Последние выполнены по специальному техническому заданию для условий работы в лифтовой установке и имеют соответствующие этим условиям характеристики. При ограниченной мощности питающей сети, когда короткозамкнугый электродвигатель не может быть применен, допускается установка электродвигателя с контактными кольцами. Номенклатура, основные технические данные и область применения электродвигателей для лифтов нормального ряда приведены в табл. 36—38.
[c.390]
В подвесных дорогах большой протяженности, с питанием электроэнергией от контактной сети перспективным видом привода является привод с тяговыми асинхронными электродвигателями трехфазного переменного тока с короткозамкнутым ротором в сочетании с новой системой электронного управления, допускающей плавное и глубокое регулирование работы тяговых двигателей. В этом случае контактное питание электроэнергией может осуществляться от одного контактного привода (шины) однофазного переменного тока или постоянного тока с использованием в качестве отводящего провода рельса дороги.
 Замена трех питающих контактных проводов одним упрощает устройство контактной сети, стрелок и других элементов верхнего строения дороги. Электрическая схема подвесного тягача показана на рис. 6.21. При питании от контактной сети постоянного тока схема упрощается, так как не требуется преобразования однофазного переменного тока в постоянный. При глубине регулирования частоты итающего тяговые электродвигатели тока от 0,1 до 60 Гц их электромеханическая скоростная характеристика имеет вид, изображенный на рис. 6.21, б, что позволяет электротягачу работать на многих экономичных ступенях регулирования скорости его движения. Как показал опыт эксплуатации подобных наземных элек-тровозоп на промышленном транспорте, новый привод с применением силовой электроники дал возможность сократить массу тягачей (локомотивов), уменьшить расходы на ремонт электродвига-
[c.136]
Замена трех питающих контактных проводов одним упрощает устройство контактной сети, стрелок и других элементов верхнего строения дороги. Электрическая схема подвесного тягача показана на рис. 6.21. При питании от контактной сети постоянного тока схема упрощается, так как не требуется преобразования однофазного переменного тока в постоянный. При глубине регулирования частоты итающего тяговые электродвигатели тока от 0,1 до 60 Гц их электромеханическая скоростная характеристика имеет вид, изображенный на рис. 6.21, б, что позволяет электротягачу работать на многих экономичных ступенях регулирования скорости его движения. Как показал опыт эксплуатации подобных наземных элек-тровозоп на промышленном транспорте, новый привод с применением силовой электроники дал возможность сократить массу тягачей (локомотивов), уменьшить расходы на ремонт электродвига-
[c.136]Синхровный элешгродвигатель. Синхронный электродвигатель имеет такой же статор с трехфазной обмоткой, как и асинхронный, создающий вращающее магнитное поле (см. рис. 9.1.2, г). Однако в отличие от асинхронного двигателя, ротор синхронного двигателя несет алекгромагниты, к которым подводится постоянный ток, или постоянные магниты и вращается с синхронной скоростью (Oq и независимо от нагрузочного момента. Поэтому статическая характеристика синхронного электродвигателя представляет собой прямую (сплошная линия), параллельную оси абсцисс (рис. 9.4.2, а), т.е. во всех точках характеристики ее жесткость равна бесконечности.
[c.546]
рис. 9.1.2, г). Однако в отличие от асинхронного двигателя, ротор синхронного двигателя несет алекгромагниты, к которым подводится постоянный ток, или постоянные магниты и вращается с синхронной скоростью (Oq и независимо от нагрузочного момента. Поэтому статическая характеристика синхронного электродвигателя представляет собой прямую (сплошная линия), параллельную оси абсцисс (рис. 9.4.2, а), т.е. во всех точках характеристики ее жесткость равна бесконечности.
[c.546]
Тяговые электродвигатели работают в чрезвычайно тяжелых условиях значительные перегрузки при пуске, доходящие до 200% от часовой мощности, удары и сотрясения, особенно резкие и сильные при трамвайной подвеске, попадание снега и влаги вместе с охлаждающим воздухом и т. д. Стремление снизить вес двигателя до. минимума приводит к высоким индукциям в железе и к большим плотностям тока в меди. Для увеличения мощности тяговые двигатели имеют воздушное охлаждение, причем на электровозах вентиляция двигателей делается независимой, т. е. от постороннего вентилятора, а на электро-вагонах двигатели имеют вентилятор на валу якоря (самовентиляция). На магистральных и пригородных ж. д. постоянного и однофазного тока применяют преи.мущественно сери, есные тяговые двигатели, на дорогах трехфазного тока — асинхронные двигатели, имеющие, как известно, шунтовую характеристику. На метро и трамваях до последнего времени применяли исключительно сериесные двига-
[c.344]
е. от постороннего вентилятора, а на электро-вагонах двигатели имеют вентилятор на валу якоря (самовентиляция). На магистральных и пригородных ж. д. постоянного и однофазного тока применяют преи.мущественно сери, есные тяговые двигатели, на дорогах трехфазного тока — асинхронные двигатели, имеющие, как известно, шунтовую характеристику. На метро и трамваях до последнего времени применяли исключительно сериесные двига-
[c.344]
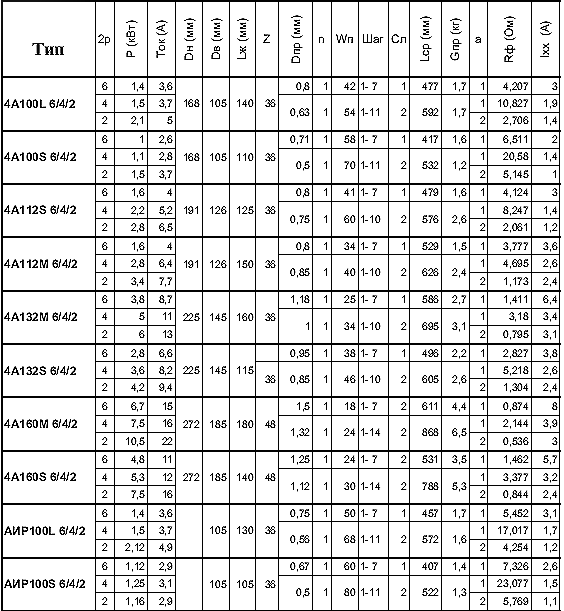
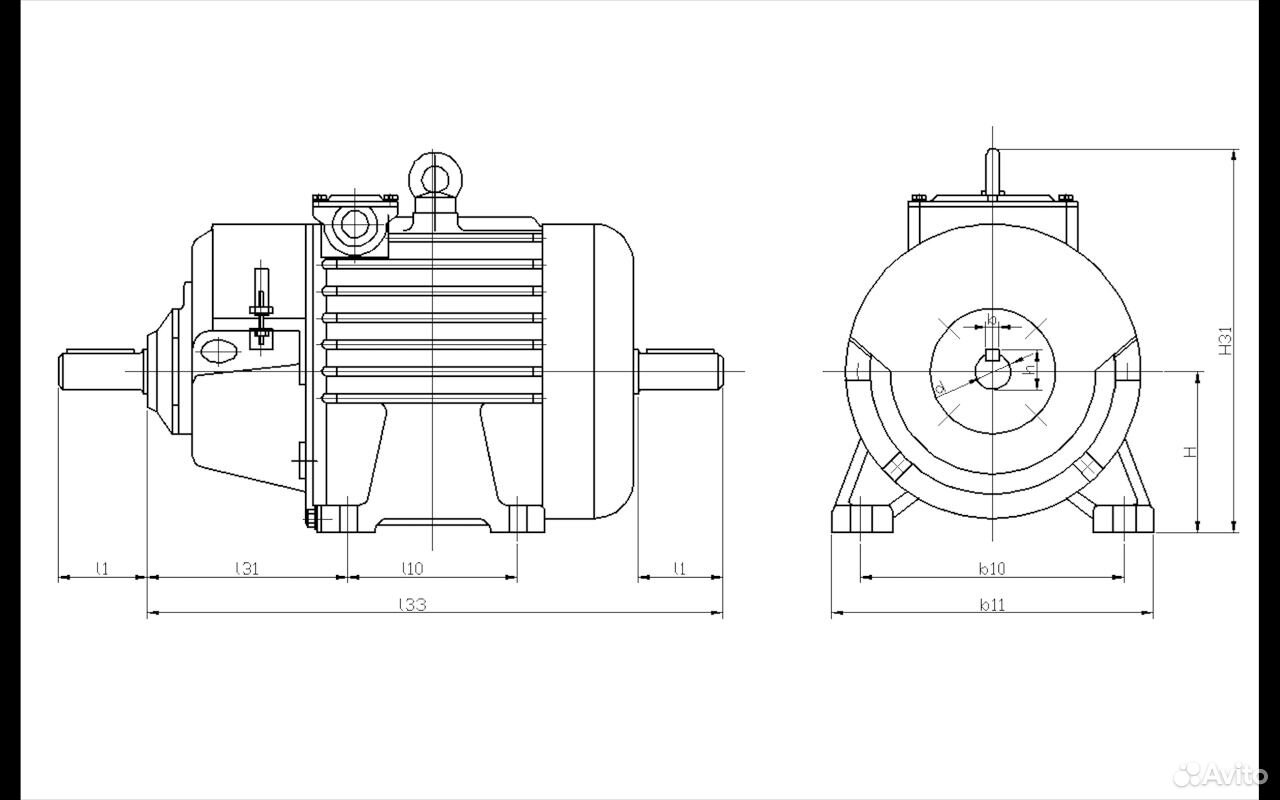
| Характеристики асинхронных двигателей серии 4А. Степень защиты – IР44. Степень охлаждения – ICA0141 Обозначения в таблице:  Также на сайте есть и характеристики и с 1500 об/мин, 1000 и 750 об/мин. Также на сайте есть и характеристики и с 1500 об/мин, 1000 и 750 об/мин.
| ||||||||
Технические характеристики асинхронных электродвигателей | Компания “Вольт”
Асинхронные двигатели представляют собой наиболее надежный и дешевый электрический двигатель по себестоимости, в сравнении с остальными электрическими машинами, в том числе и с машинами переменного тока.
Конструкция АД включает две главных основные части, это: неподвижный статор и вращающийся в нем – ротор. Между ними существует, разделяющий их воздушный зазор. И ротор, и статор имеют обмотку. Обмотка статора двигателя подключается к электрической сети переменного напряжения и считается первичной. Обмотка ротора считается вторичной, так получает электроэнергию от статора за счет создаваемого магнитного потока.
Устройство асинхронного двигателя
Корпус статора, который является одновременно корпусом всего электродвигателя, состоит из запрессованного в него сердечника, в его пазы укладываются, изолированные друг от друга электротехническим лаком, проводники обмотки.
Обмотка статора подразделяется на секции, соединяемые в катушки, составляющих фазы двигателя к которым подключены фазы электросети.
Конструкция ротора АД включает вал и сердечник, набранный из пластин электротехнической стали, с симметрично расположенными пазами для укладки проводников обмотки. Вал предназначен для передачи крутящего момента от вала двигателя к приводному механизму.
Вал предназначен для передачи крутящего момента от вала двигателя к приводному механизму.
По конструктивным особенностям ротора, электродвигатели подразделяются на двигатель с короткозамкнутым или фазным ротором.
Короткозамкнутый ротор состоит из алюминиевых стержней, которые расположены в сердечнике и замкнуты на торцах кольцами так называемое беличье колесо. В двигателях высокой мощности, до 400кВт, пазы между пластинами ротора и шихтованным сердечником залиты алюминием под высоким давлением, благодаря чему создается повышенная прочность.
Фазный ротор АД включает некоторое число катушек от 3, 6, 9 и т. д. в зависимости от количества пар полюсов. Катушки сдвинуты на угол 120о, 60о и т. д. по отношению друг к другу. Количество пар полюсов ротора должны соответствовать количеству пар полюсов статора. Обмотки фазного ротора соединены в «звезду», концы, которой выводят к контактным токосъемным кольцам, соединенным с помощью щеточного механизма пусковым реостатом.
По какому принципу работает асинхронный двигатель?
При подаче на трехобмоточный статор двигателя трехфазного напряжения от электрической сети переменного тока, происходит возбуждение магнитного поля, оно вращается со скоростью большей, чем скорость, с которой вращается ротор, в (n2<n1). Пересечение линий вращающегося поля статора полем ротора способствует созданию электродвижущей силы (ЭДС). Под воздействием индутируемой ЭДС, в закороченной роторной обмотке, происходит возникновение электрического тока. Когда происходит взаимодействие электрического тока в роторе машины и магнитного поля статора происходит возникновение крутящего момента, который заставляет двигатель работать.
Основные технические характеристикиГлавные условия, соответствующие качественной работе асинхронной машины, определенны ГОСТ. В них входят:
- Соответствие размеров и мощности – ГОСТу.

- Соответствие степени защиты – условиям эксплуатации.
- Высокий уровень изоляции, относительно устойчивости к нагреву.
- Климатическое исполнение электродвигателя должно соответствовать региону использования.
- Соответствие режимам работы.
- В должной мере представлены способы охлаждения.
- Уровень шума при работе двигателя на (ХХ) холостом ходу должен соответствовать по ГОСТ, и не превышать 2-й класс.
Параметры и режимы работы асинхронного двигателя
На основании вышеприведенных признаков подразумеваются следующие режимы работы, всего их 9.
- Продолжительный или длительный режим с постоянной нагрузкой– S
- Кратковременный, с полной нагрузкой – в течение заданного времени – S
- Периодический кратковременный – в течение определенного по времени чередующимися периодами с полной нагрузкой – S
- Режим с длительным периодом пуска, с определенными циклами работы в течение заданного периода времени– S
- С быстрым торможением при помощи электрического способа – S
- С кратковременной полной величиной нагрузки, режим включает циклы с полной токовой нагрузкой и холостым ходом – S
- Режим с торможением электрическим способом, в течение длительного непрерывного периода работы – S
- С изменением величины токовой нагрузки и значения скорости вращения, происходящими одновременно, с различными по протяженности периодами и с разной частотой вращения двигателя – S
- Изменение скорости вращения нагрузки, происходящее в неопределенные периоды времени, изменение величины токовой нагрузки и скорости вращения соответственно рабочему диапазону.
 – S
– S
Основные параметры – это: напряжение по номинальному пределу, частота, ток номинальный, мощность на валу двигателя, количество оборотов вращения вала, КПД (коэффициент полезного действия), коэффициент мощности. При соединении обмоток электродвигателя в треугольник или звезду дается параметр их напряжения и тока при обоих этих соединениях.
Короткая заметка: Компания «Стальинвест» оказывает полный комплекс услуг по производству и монтажу зданий из сэндвич панелей.
При пуске АД на полное значение напряжения создается высокий пусковой ток, в это время значение пускового момента невелико, для его увеличения применяется повышение активного сопротивления вторичной цепи.
Режимы торможенияАсинхронный двигатель имеет три режима торможения.
- Во время торможения происходит отдача электрической энергии в сеть, характеризуется тем, что скорость вращения ротора выше скорости магнитного поля.
- Противовключение, этот режим возникает за счет увеличения статического момента или при переключении обмоток статора для другого направления вращения.

- Динамическое торможение, наведенная ЭДС создает ток, который взаимодействуя с полем, создает тормозной момент.
Основные типы асинхронных двигателей
Кроме подразделения по признаку, разделяющему двигатели в зависимости от устройства ротора на короткозамкнутый или фазный, электродвигатели делятся по конструктивным признакам, базового и модифицированного изготовления.
В базовое исполнение входят электродвигатели монтажного IM1001 (1081) или климатического УЗ, для работы в режиме S1, исполнения с требуемыми стандартами по ГОСТ.
В модифицированном исполнении присутствуют некоторые конструктивные отличия, соответствующие особенностям монтажа, усиленной степени защиты, характерному климатическому исполнению, предназначенные для использования в определенном регионе.
Асинхронные двигатели высокой мощности, со степенью защиты характерной для закрытого электродвигателя, от попадания влаги и брызг, IP23 — 4А, 5А
Взрывозащищенные двигатели, используемые для предприятий первой категории по электробезопасности.
АД специального предназначения, используются в узкоспециализированном профиле, например, для лифтов, подъемных механизмов, транспорта.
Энергоэффективные асинхронные электродвигателиИзготовление двигателей для специальных и строго определенных условий эксплуатации, положительно сказывается на энергосбережении, это позволяет адаптировать электродвигатель к определенному электроприводу, что позволяет достичь наибольшего коэффициента экономической эффективности при эксплуатации. Проектирование асинхронного электродвигателя к регулируемому электроприводу обеспечивает эффективное энергосбережение.
Энергоэффективность достигается, за счет увеличения длины сердечника статора, без изменения величины и геометрии поперечного сечения, а также за счет уменьшения количества витков статорной обмотки для электропривода с возможностью регулирования. В результате получается значительное энергосбережение.
Пишите комментарии, дополнения к статье, может я что-то пропустил. Загляните на карту сайта, буду рад если вы найдете на моем сайте еще что-нибудь полезное.Всего доброго.
Загляните на карту сайта, буду рад если вы найдете на моем сайте еще что-нибудь полезное.Всего доброго.
- Печать
- по электронной почте
Механические характеристики асинхронных электродвигателей (лекция 4)
1. Механические характеристики асинхронных электродвигателей
Курс1.Часть2. Регулированиечастоты вращения
электроприводов постоянного и
переменного тока
Механические характеристики
асинхронных
электродвигателей
1.
2.
3.
1
Модель асинхронного электродвигателя.
Естественная механическая характеристика
асинхронного электродвигателя.
Управление пуском асинхронных
электродвигателей. Расчет пусковых реостатов
2. Модель асинхронного электродвигателя.
Достоинства асинхронного электродвигателя:простота конструкции;
низкая металлоемкость;
допускает прямой пуск от сети;
повышенная надежность;
простота в ремонте и эксплуатации.

2
3. Модель асинхронного электродвигателя.
Асинхронного электродвигателиизготавливают двух типов с фазным
и короткозамкнутым ротором.
0
3
4. Модель асинхронного электродвигателя.
Электродвигатели с короткозамкнутым роторомимеют обмотку ротора в виде «беличьей клетки». Она
постоянна замкнута в лобовых частях ротора при
помощи короткозамкнутых колец. К ним подсоединены
стержни проводники, которые размещены в пазах
сердечника ротора.
4
5. Модель асинхронного электродвигателя.
а)б)
в)
5
г)
6. Модель асинхронного электродвигателя.
Пусть на статоре расположена катушка А-Х покоторой протекает переменный ток
iА = Im sin t; = 2 f1.
МДС FА, созданная этим током, будет пульсировать по
оси обмотки
FА = Fm sin t.
6
7. Модель асинхронного электродвигателя.
Если добавить катушку В-Y, расположенную под углом900 и пропускать по ней ток
iВ = Im cos t, то
МДС FВ будет пульсировать по оси этой обмотки
FВ = Fm cos t.
7
8. Модель асинхронного электродвигателя.
Вектор результирующей МДС имеет модульF
2
FA
2
FB
Fm const .
Его фаза определится из условия
FA
tg
tg t
FB
Таким образом, вектор результирующей МДС
вращается с угловой скоростью
8
2 f 1 .
9. Модель асинхронного электродвигателя.
Частота вращения магнитного поля n1 как иугловая скорость ω1 находится в строгой зависимости от
частоты подводимого напряжения сети f1 и числа пар
полюсов р двигателя:
60 f 1
п1
,
p
9
2 f 1
1
.
p
10. Модель асинхронного электродвигателя.
Наведение в обмотке ротора ЭДС и появлениевращающего или тормозящего момента асинхронного
Двигателя возможно только при наличии разности
Между угловыми скоростями вращения магнитного
поля статора и ротора. Это различие оценивают в
относительных единицах и называют скольжением
10
1 2
S
.

1
11. Естественная механическая характеристика асинхронного электродвигателя
I1Uф
Х1
Х0
R1
I 2
Х 2
R2
S
R0
Упрощенная схема замещения асинхронного электродвигателя
11
12. Естественная механическая характеристика асинхронного электродвигателя
2Uф
R2 2
( R1
) ( X 1 X 2 )2
S
Вращающий момент асинхронного двигателя может
быть определен из выражения потерь :
1 S 3( 2
12
3( 2 ) 2 R2
) R2
.
1 S
3U ф 2 R2
2
R2 2
2
1 ( R1
) ( X 1 X 2 ) S
S
13. Естественная механическая характеристика асинхронного электродвигателя
213
1
1
2
14. Естественная механическая характеристика асинхронного электродвигателя
R2/ R12 S 2 ( X 1 X 2/ )2 S 2dM 3 U ф R2
0,
2
/
2
/
2
2
dS
1
( R1 S R2 ) ( X 1 X 2 ) S
2
/
R2/ R12 S 2 ( X 1 X 2/ )2 S 2 0 R2/ R12 S 2 ( X 1 X 2/ )2 S 2
sк
Mк
14
R2
R12 ( X 1 X 2 )2
3U 2
2 0 R1 R12 ( X 1 X 2 )2
15.
 Естественная механическая характеристика асинхронного электродвигателя Разделив уравнение механической характеристики на
Естественная механическая характеристика асинхронного электродвигателя Разделив уравнение механической характеристики навыражение для максимального момента получим
2М к ( 1 Sк )
R1
М
, /.
S Sк
R2
2 S к
Sк
S
Приняв
2 S к q ,
окончательно получаем
15
М дв
М кр ( 2 q )
S кр
S
q
S кр
S
.
16. Естественная механическая характеристика асинхронного электродвигателя
1617. Естественная механическая характеристика асинхронного электродвигателя
Характерными точками механической характеристикиявляются:
• пусковая точка – М=Мп; ω=0;
• точка провала на пусковой ветви, угловая скорость,
• в которой соответствует скольжению S=0,8; М=Ммин;
• критическая точка с координатами ωк, Мк;
• номинальная точка – ωн, Мн;
• точка холостого хода – ω=ω1; М=0.
17
18. Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
Кратность начального пускового момента двигателясоставляет
Мп
kм
1.
 ..1,8
..1,8Мн
а кратность начального пускового тока
Iп
k I 5…7
Iн
Отсутствие пропорциональности между моментом
двигателя и током статора во время пуска объясняется
значительным снижением магнитного потока.
18
19. Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
Для повышения начального пускового момента иснижения пускового тока применяются
короткозамкнутые двигатели специальных конструкций,
у которых ротор имеет две клетки, расположенные
концентрически, или глубокие пазы с высокими и
узкими стержнями.
19
20. Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
У двигателей с контактными кольцами начальныйпусковой момент увеличивается по мере возрастания
до известных пределов сопротивления реостата.
величина начального пускового момента может быть
доведена до величины критического момента.
пусковой ток при увеличении сопротивления
уменьшается.

20
21. Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
MнК расчету пускового реостата асинхронного двигателя
21
22. Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
Методика расчета:•на характеристике Мдв=f( ), наносятся границы пуска;
•через точки d и d1 естественной механической
характеристики, соответствующие значениям моментов
Мпуск макс и Мпуск мин, проводится прямая до пересечения
с линией синхронной скорости (S=0) в точке t;
•из полученной точки проводится пусковая
характеристика до точки с координатами Мпуск макс, ω=0;
22
23. Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
•в точке с координатами Мпуск мин, ω=ω3 происходитотключение первой ступени реостата;
•в точке с координатами Мпуск мин, ω=ω2 происходит
отключение второй ступени реостата;
•отрезок [ed] пропорционален величине активного
сопротивления одной фазы ротора.
 Соответственно
Соответственноотрезок [dc] в относительных единицах пропорционален
сопротивлению первой ступени пускового реостата,
отрезок [bс] – второй ступени.
23
24. Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
Измерив длины этих отрезков, определяют величинысопротивления каждой ступени пускового реостата:
R1
где
24
dc R
ed рот
R рот
U 2 н Sн
3I 2 н
.
R2
или
cb R
ed рот
R рот
Рн S н
3 2н н
2
.
25. Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
При реостатном пуске асинхронного электродвигателяс контактными кольцами поочередное закорачивание
ступеней пускового сопротивления может
производиться автоматически при помощи контакторов,
управление включением которых может осуществляться
в функции времени, частоты вращения, тока или
частоты тока ротора.
25
26. Управление пуском асинхронного электродвигателя.
 Расчет пусковых реостатов Для обеспечения заданной диаграммы пуска необходима
Расчет пусковых реостатов Для обеспечения заданной диаграммы пуска необходимафиксация моментов подачи команд на включение
контакторов. Это может осуществляться следующими
способами:
•путем отсчета промежутков времени Δt1, Δt2, Δt3,
для чего используются реле времени;
• посредством контроля значения скорости двигателя
или ЭДС ротора, что может быть сделано при помощи
датчиков скорости или ЭДС;
•применением датчиков тока;
•посредством контроля частоты тока ротора .
26
27. Управление пуском асинхронного электродвигателя. Расчет пусковых реостатов
SB1KM1
KM1
SB2
KM1
KT1
M2
KM4
M1
KM4
KM4
KT1:1
KT1:2
KM2
KM3
R31…R33
KM3
R21…R23
27
KM2
R11…R13
KT1:3
KM4
Схема электрическая принципиальная управления
пуском асинхронного двигателя в функции времени
28. Управление пуском асинхронного электродвигателя.
 Расчет пусковых реостатов Время пребывания на каждой ступени пускового
Расчет пусковых реостатов Время пребывания на каждой ступени пусковогореостата определяется по следующему соотношению:
ti
о S нi
Мн
ln
М дин 1i
М дин 2i
,
Мдин 1i=Мпуск макс–Мсi; M дин 2i=Мпуск мин–Мсi.
28
Асинхронные двигатели – Руководство по электрическому монтажу
Асинхронный (т.е. асинхронный) двигатель прочен и надежен и очень широко используется. 95% двигателей, установленных по всему миру, являются асинхронными. Следовательно, защита этих двигателей имеет большое значение во многих областях применения.
Введение
Асинхронные двигатели используются в самых разных областях. Вот несколько примеров приводных машин:
- кондиционеры,
- чиллеры,
- лифтов,
- вентиляторы и нагнетатели,
- пожарный насос,
- центробежные насосы, Компрессоры
- ,
- дробилки, Конвейеры
- ,
- подъемники и краны,
- .
 ..
..
Последствия отказа двигателя из-за неправильной защиты или невозможности работы схемы управления могут включать следующее:
- Для лиц:
- Удушье из-за блокировки вентиляции двигателя
- Поражение электрическим током из-за нарушения изоляции двигателя
- Авария из-за того, что двигатель не остановился из-за отказа цепи управления
- Для ведомой машины и процесса:,
- Муфты валов, оси, приводные ремни,… повреждены из-за остановки ротора
- Пострадавшая продукция
- Отложенное производство
- Для самого мотора:
- Перегорели обмотки двигателя из-за остановки ротора
- Стоимость ремонта
- Стоимость замены
Таким образом, безопасность людей и товаров, а также уровень надежности и доступности во многом зависят от выбора средств защиты.
С экономической точки зрения необходимо учитывать общую стоимость отказа. Эта стоимость увеличивается с увеличением размера двигателя и трудностями доступа и замены. Потери производства – еще один, очевидно, важный фактор.
Эта стоимость увеличивается с увеличением размера двигателя и трудностями доступа и замены. Потери производства – еще один, очевидно, важный фактор.
Специфические характеристики двигателя влияют на цепи питания, необходимые для удовлетворительной работы.
Цепь питания двигателя имеет определенные ограничения, которые обычно не встречаются в других (общих) схемах распределения.Это связано с особыми характеристиками двигателей, напрямую подключенных к линии, таких как:
- Высокий пусковой ток (см. , рис. N74), который в основном является реактивным и поэтому может быть причиной значительного падения напряжения
- Количество и частота пусковых операций в целом высокие
- Высокий пусковой ток означает, что устройства защиты двигателя от перегрузки должны иметь рабочие характеристики, предотвращающие срабатывание во время периода пуска.
Рис. N74 – Характеристики прямого пускового тока асинхронного двигателя
2-3-3. Характеристики асинхронных двигателей
Как описано в главе 1, синхронная скорость вращения двигателя с магнитным полем определяется по следующей формуле:
N S : Синхронная скорость вращения (оборотов в минуту) [об / мин] N 0 : Синхронная скорость вращения (оборотов в секунду) [об / сек]
f: Частота источника питания [Гц] p: Число полюсов двигателя
Накладка
Когда мы думаем об асинхронных двигателях, это важный момент.То есть катушка должна пересекать магнитное поле, чтобы через катушку протекал ток.
Для этого должна быть относительная разница скоростей между магнитным полем и катушкой.
Из-за этой разницы скоростей двигатель вращается со скоростью, немного меньшей, чем синхронная скорость.
Это отличие скорости от синхронной скорости называется скольжением и обозначается символом s. Скольжение s выражается следующей формулой:
N: Скорость вращения ротора [об / мин] N S : Синхронная скорость вращения [об / мин]
Скольжение обычно выражается в процентах.Скольжение силового асинхронного двигателя составляет от 2 до 3%, когда двигатель работает при номинальной нагрузке. Вышеуказанное значение становится несколько больше для небольших однофазных двигателей.
Скорость вращения и крутящий момент
На рис. 2.40 показаны характеристики асинхронных двигателей. Когда двигатель сконструирован таким образом, что сопротивление алюминиевого проводника ротора уменьшается, его эффективность увеличивается в диапазоне высоких скоростей. И с другой стороны, когда двигатель спроектирован так, чтобы иметь высокое сопротивление, он имеет повышенный крутящий момент в диапазоне низких скоростей.
В области справа от максимального крутящего момента на характеристической кривой увеличение нагрузки не так сильно снижает скорость низкоомных двигателей. Крутящий момент увеличивается и становится стабильным.
А именно, скорость этих двигателей остается практически неизменной, несмотря на изменения нагрузки.
На рис. 2.41 показаны характеристики этих двигателей с учетом крутящего момента по горизонтальной оси и скорости вращения по вертикальной оси с добавлением тока и эффективности.
Сравнивая этот график с приведенными выше характеристиками двигателей постоянного тока, вы обнаружите следующие характеристики асинхронных двигателей.
- ● Изменения нагрузки не сильно влияют на их скорость, хотя их крутящий момент изменяется.
- ● Связь между крутящим моментом и током не линейна.
и технические характеристики двигателя переменного тока
Обзор двигателя переменного тока
Если вам нужна исчерпывающая информация о двигателях переменного тока, вы обратились по адресу.Индивидуальные двигатели переменного тока делятся на две основные категории: синхронные и асинхронные. Наиболее распространенным типом асинхронного двигателя является асинхронный двигатель переменного тока, который производители двигателей изготавливают на заказ с использованием трансформатора переменного тока с вращающейся вторичной обмоткой. В этом типе двигателя первичная обмотка или статор подключается к источнику питания, в то время как закороченный вторичный элемент или ротор несет наведенный вторичный ток. Воздействие токов ротора на поток в воздушном зазоре создает крутящий момент. С другой стороны, асинхронный двигатель находится в отдельном классе двигателей переменного тока из-за различий в конструкции и рабочих характеристиках.Sinotech предлагает обширный каталог двигателей, изготовленных нашими производителями двигателей переменного тока, который может быть адаптирован к вашим точным спецификациям.
Узнайте последние новости о двигателях переменного тока в нашем блоге.
Асинхронные VS синхронные двигатели переменного тока
Обзор асинхронных асинхронных асинхронных двигателейАсинхронные двигатели переменного тока
Все асинхронные двигатели являются асинхронными двигателями. Асинхронные двигатели переменного тока, как один из самых простых и надежных электродвигателей, имеют две основные электрические сборки: статор с обмоткой и узел ротора.Двигатель получил свое название от токов, протекающих в ротор, которые индуцируют переменные токи, протекающие в первичном элементе или статоре. Комбинированные магнитные эффекты токов статора и ротора создают силу, необходимую для вращения.
Двигатели переменного тока серии, в том числе асинхронные двигатели переменного тока, имеют роторы с пластинчатым цилиндрическим железным сердечником с прорезями для ввода проводов. Наиболее распространенный тип ротора, производимый производителями двигателей переменного тока, иногда называют «беличьей клеткой», который имеет литые алюминиевые проводники и замыкающие концевые кольца.Беличья клетка вращается, когда движущееся магнитное поле создает ток в укороченных проводниках.
В двигателе переменного тока скорость вращения магнитного поля называется синхронной скоростью (n s ). Эта скорость определяется количеством полюсов статора и частотой источника питания. Формула для расчета синхронной скорости двигателя переменного тока: n с = 120 f / p.
- n с: синхронная скорость в об / мин
- f: частота сетевого напряжения в Гц
- р: количество полюсов
Синхронная скорость – это абсолютный верхний предел скорости двигателя переменного тока.Если ротор вращается с той же скоростью, что и вращающееся магнитное поле, проводники ротора не перерезают силовые линии и не создают крутящего момента.
При работе двигателя переменного тока ротор всегда вращается медленнее, чем магнитное поле. Скорость ротора достаточно мала, чтобы вызвать надлежащую величину протекания тока ротора, чтобы результирующий крутящий момент был достаточным для управления нагрузкой и преодоления потерь на ветер и трение.
Разница в скорости между ротором двигателя переменного тока и магнитным полем называется «скольжением».«Скольжение – это процент от синхронной скорости. Формула для расчета скольжения: s = 100 (n s – n a ) / n s .
- s = скольжение
- n с = синхронная скорость
- n a = фактическая скорость
Синхронные двигатели Обзор
Синхронные двигателиимеют особую конструкцию ротора, которая позволяет им вращаться с той же скоростью, что и поле статора. Другими словами, они работают абсолютно синхронно с частотой сети.К основным типам синхронных двигателей относятся двигатели без возбуждения и с возбуждением от постоянного тока. Как и в случае с асинхронными двигателями переменного тока, скорость синхронных двигателей определяется количеством пар полюсов. Он рассчитывается по соотношению частот линии.
Изготовители двигателей на заказ проектируют синхронные двигатели различных размеров, от субфракционных двигателей с самовозбуждением до двигателей переменного тока большой мощности с возбуждением от постоянного тока для промышленных приводов. В диапазоне дробных лошадиных сил синхронные двигатели служат для обеспечения точной постоянной скорости.
В применении к промышленным нагрузкам синхронные двигатели большой мощности выполняют две важные функции:
- Обеспечивают высокоэффективные средства преобразования энергии переменного тока в механическую энергию
- Работает с опережающим или единичным коэффициентом мощности, обеспечивая коррекцию коэффициента мощности
Синхронные электродвигатели без возбуждения
Производители двигателей переменного тока создают невозбужденные электродвигатели, использующие конструкции реактивного сопротивления и гистерезиса.Они используют схему самозапуска и не требуют внешнего источника возбуждения.
Синхронные электродвигатели с постоянным возбуждением
Электродвигателис возбуждением постоянным током доступны мощностью более 1 л.с. Для работы им требуется постоянный ток, подаваемый через контактные кольца для возбуждения. Двигатель получает постоянный ток от отдельного источника или генератора постоянного тока, подключенного к валу двигателя переменного тока.
Однофазные и многофазные синхронные двигатели должны приводиться в действие или их ротор должен быть подключен в виде цепи самозапуска для запуска.Поскольку поле электродвигателя вращается с синхронной скоростью, электродвигатель должен быть ускорен, прежде чем он сможет синхронизироваться. Ускорение с нулевой скорости требует проскальзывания до достижения синхронизма. Следовательно, для начала важно использовать отдельные средства.
В самозапускающихся электрических двигателях переменного тока, изготовленных по индивидуальному заказу, в размерах л.с. используются методы пуска, общие для асинхронных электродвигателей, такие как разделенная фаза, конденсаторный пуск, отталкивающий пуск и затененный полюс. Двигатели автоматически переключаются на синхронную работу из-за электрических характеристик.
В двигателяхс возбуждением постоянным током для пуска используется беличья клетка, называемая амортизатором или демпферной обмоткой. Между прочим, присущий двигателю низкий пусковой момент и потребность в источнике питания постоянного тока требуют системы пуска, которая:
- Обеспечивает полную защиту электродвигателя при запуске
- Применяет возбуждение постоянного поля в нужное время
- Снимает возбуждение поля при извлечении ротора (максимальный крутящий момент)
- Защищает обмотку электродвигателя с короткозамкнутым ротором от теплового повреждения в нештатных условиях.
Взгляд на крутящий момент в электродвигателях с постоянным возбуждением
Момент подъема
Крутящий момент электродвигателя определяется как минимальный крутящий момент, создаваемый от состояния покоя до точки втягивания.Этот крутящий момент должен превышать крутящий момент нагрузки в достаточной степени, чтобы поддерживать удовлетворительную скорость ускорения при нормальных условиях напряжения.
Момент сопротивления
Реактивный крутящий момент двигателя является результатом выступа полюсных наконечников ротора, что является предпочтительным направлением намагничивания. Он пульсирует на скоростях ниже синхронной.
Момент сопротивления влияет на моменты втягивания и извлечения двигателя, поскольку невозбужденный явнополюсный ротор стремится выровняться с магнитным полем статора электродвигателя, чтобы поддерживать минимальное магнитное сопротивление.Реактивного сопротивления электродвигателя может быть достаточно, чтобы синхронизировать слегка нагруженную малоинерционную систему и развить крутящий момент отрыва около 30 процентов.
Синхронный момент
Синхронный крутящий момент электродвигателя – это крутящий момент, создаваемый после приложения возбуждения. Он представляет собой общий крутящий момент в установившемся режиме, доступный для привода нагрузки. Крутящий момент достигает максимума примерно при 70 отставании ротора от магнитного поля вращающегося статора. Однако максимальное значение – это момент отрыва.
Момент отрыва
Момент отрыва – это максимальный устойчивый крутящий момент, который электродвигатель развивает при синхронной скорости в течение одной минуты с номинальной частотой и нормальным возбуждением. Нормальный крутящий момент отрыва обычно составляет 150 процентов крутящего момента при полной нагрузке для электродвигателей с единичным коэффициентом мощности. Для электродвигателей с опережающим коэффициентом мощности 0,8 он составляет от 175 до 200 процентов.
Момент втягивания
Вращающий момент синхронного двигателя – это крутящий момент, развиваемый при переводе подключенной инерционной нагрузки в синхронизм при приложении возбуждения.Он разработан при переходе от скорости скольжения к синхронной скорости, когда электродвигатели переходят от индукционной к синхронной работе. Это обычно самый критический период при запуске синхронного двигателя. При синхронной скорости крутящий момент, развиваемый амортизатором и обмотками возбуждения, становится нулевым. В результате только реактивное сопротивление и синхронизирующий момент, обеспечиваемые возбуждением обмоток возбуждения, эффективны в точке втягивания.
Дополнительные типы конструкции электродвигателей переменного тока по индивидуальному заказу
Многофазные двигатели переменного тока
Многофазные двигатели переменного тока с короткозамкнутым ротором, например трехфазные, представляют собой машины с постоянной скоростью.Они обладают некоторой степенью гибкости в рабочих характеристиках при изменении конструкции паза ротора. Изменения в двигателях переменного тока вызывают изменения тока, крутящего момента и скорости при полной нагрузке. Стандартизация и инновации позволили получить четыре основных типа двигателей переменного тока:
Конструкции A и B Характеристики
- Электродвигатель переменного тока общего назначения с нормальными пусковыми моментами и токами, а также с малым скольжением
- Фракционные многофазные двигатели переменного тока обычно имеют конструкцию B
- Поскольку конструкция B имеет падающие характеристики, многофазный двигатель переменного тока с таким же пробоем или максимальным крутящим моментом, что и однофазный двигатель переменного тока, не может достичь той же точки скорости-момента для скорости полной нагрузки, что и однофазный нестандартный двигатель переменного тока. моторные конструкции
- Пробойный момент должен быть выше для сопоставимых скоростей полной нагрузки (минимум 140 процентов пробивного момента однофазных двигателей переменного тока общего назначения)
Конструкция C Характеристики
- Высокий пусковой момент при нормальном пусковом токе и малом скольжении
- Используется там, где отрывные нагрузки высоки при пуске, но обычно работают при номинальной полной нагрузке
- Не подвержен высоким требованиям к перегрузке после достижения рабочей скорости
Конструкция D Характеристики
- Высокое скольжение, позволяющее снизить скорость при колебаниях нагрузки
- Низкий пусковой ток
- Низкая частота вращения при полной нагрузке
- Эту конструкцию можно разделить на несколько подгрупп, которые различаются скольжением или формой кривой скорость-крутящий момент.
Конструкция F Характеристики
- Низкий пусковой момент
- Низкий пусковой ток
- Низкое скольжение
- Изготовители двигателей на заказ создают двигатели переменного тока для получения низкого тока заторможенного ротора
- Заторможенный ротор и низкий момент пробоя
- Двигатели обычно используются, когда пусковой крутящий момент низкий и не возникают высокие перегрузки после достижения рабочей скорости
Двигатели переменного тока с фазным ротором
Двигатели переменного токас короткозамкнутым ротором относительно негибки в отношении характеристик скорости и крутящего момента.Однако специальный двигатель переменного тока с фазным ротором имеет регулируемые скорость и крутящий момент. Применение двигателей переменного тока с фазным ротором заметно отличается от двигателей переменного тока с короткозамкнутым ротором из-за доступности цепи ротора. Чтобы получить характеристики двигателя переменного тока, нужно ввести различные значения сопротивления в цепь ротора.
Вторичное сопротивление в цепи ротора обычно запускает двигатели переменного тока с фазным ротором. Затем сопротивление двигателя переменного тока последовательно снижается, чтобы двигатель разгонялся.В результате двигатели переменного тока могут развивать значительный крутящий момент при ограничении тока заторможенного ротора. Производители двигателей переменного тока могут спроектировать это вторичное сопротивление двигателя для непрерывной работы, чтобы рассеивать тепло, выделяемое при непрерывной работе на пониженных скоростях, частом ускорении или ускорении с большими инерционными нагрузками.
Внешнее сопротивление придает двигателям переменного тока характеристику, которая приводит к значительному падению оборотов в минуту при небольшом изменении нагрузки. Обеспечивается пониженная скорость двигателя переменного тока примерно до 50% от номинальной скорости, но эффективность остается низкой.
Многоскоростные электродвигатели переменного тока
Изготовители двигателей на заказ проектируют двигатели переменного тока с последовательным переключением полюсов для работы на одной скорости. Путем физического повторного подключения выводов они могут достичь соотношения скоростей 2: 1. Типичные скорости для двигателей переменного тока 60 Гц:
- 3600/1800 об / мин (2/4 полюса)
- 1800/900 об / мин (4/8 полюса)
- 1200/600 об / мин (6/12 полюсов)
Двухобмоточные двигатели переменного тока имеют две отдельные обмотки, которые производители могут наматывать на любое количество полюсов, чтобы облегчить получение других соотношений скоростей.Однако соотношение больше 1: 4 нецелесообразно из-за размера и веса двигателя переменного тока. Однофазные двигатели переменного тока обычно имеют конструкцию с регулируемым крутящим моментом. Однако также доступны двигатели переменного тока с постоянным крутящим моментом и постоянной мощностью.
Выходная мощность двигателей переменного тока может быть пропорциональна каждой скорости. Такие нестандартные конструкции электродвигателей переменного тока имеют выходную мощность в лошадиных силах в соответствии с одной из следующих нагрузочных характеристик:
- Переменный крутящий момент : Эти двигатели переменного тока имеют характеристики скорость-крутящий момент, которые изменяются пропорционально квадрату скорости.Например, электродвигатель со скоростью 1800/900 об / мин, который развивает 10 л.с. при 1800 об / мин, выдает 2,5 л.с. при 900 об / мин. Поскольку двигатели переменного тока сталкиваются с нагрузками, такими как центробежные насосы, вентиляторы и воздуходувки, их требования к крутящему моменту зависят от квадрата или куба скорости. Эта моторная характеристика в целом адекватна.
- Постоянный крутящий момент : Эти двигатели переменного тока могут развивать одинаковый крутящий момент на каждой скорости. В результате выходная мощность напрямую зависит от скорости. Например, двигатель переменного тока мощностью 10 л.с. при 1800 об / мин выдает 5 л.с. при 900 об / мин.Вы найдете эти двигатели в приложениях с требованиями к постоянному крутящему моменту, таких как смесители, конвейеры и компрессоры.
- Постоянная л.с. : Эти двигатели переменного тока развивают одинаковую мощность на каждой скорости. Крутящий момент обратно пропорционален скорости. Такие двигатели переменного тока применяются в станках, включая дрели, фрезерные станки и токарные станки.
Однофазные двигатели переменного тока
Однофазные асинхронные электродвигатели переменного тока обычно имеют дробную мощность.Однако однофазная интегральная мощность доступна в более низком диапазоне лошадиных сил. Наиболее распространенные однофазные двигатели переменного тока с дробной мощностью:
- Двухфазный
- Конденсатор-смарт
- Постоянный разделенный конденсатор
- Шторка
Эта индивидуальная конструкция двигателя переменного тока доступна в многоскоростных типах, но есть практические ограничения на количество получаемых скоростей. Доступны модели с двух-, трех- и четырехскоростными двигателями. Выбор скорости может сопровождаться последовательными полюсами или двумя обмотками.
Универсальные моторы
Универсальные моторы
Универсальные двигатели работают с почти эквивалентной производительностью на постоянном или переменном токе до 60 Гц. Двигатели переменного тока отличаются от двигателей постоянного тока соотношением обмоток и более тонкими слоями железа. Двигатели постоянного тока могут работать на переменном токе, но с низким КПД. Универсальные двигатели могут работать от постоянного тока с практически эквивалентными характеристиками двигателя переменного тока. Однако их коммутация и срок службы щеток ниже, чем у аналогичного двигателя постоянного тока.Важной характеристикой универсальных двигателей переменного тока является то, что они имеют самое высокое соотношение мощности на фунт среди всех двигателей переменного тока, поскольку они работают на скоростях, во много раз превышающих скорость любого электродвигателя с частотой 60 Гц.
Универсальные двигатели при работе без нагрузки имеют тенденцию к разбегу. Скорость ограничена только парусностью, трением и коммутацией. Поэтому большие универсальные двигатели почти всегда подключаются напрямую к нагрузке для ограничения скорости. На портативных инструментах, таких как электрические пилы, нагрузки на шестерни, подшипники и охлаждающий вентилятор достаточно, чтобы поддерживать скорость холостого хода на безопасном уровне.
С универсальным двигателем регулирование скорости является простым, поскольку скорость электродвигателя чувствительна к изменениям напряжения и магнитного потока. Реостат или регулируемый автотрансформатор позволяют легко изменять скорость двигателя переменного тока от максимальной до нуля.
Электродвигатели с синхронизацией по времени
Электродвигатели ГРМ мощностью менее 1/10 л.с. используются в качестве первичных двигателей для синхронизирующих устройств. Поскольку двигатель используется в качестве таймера, он должен работать с постоянной скоростью.
Электродвигателипеременного и постоянного тока могут использоваться в качестве синхронизирующих двигателей.Электрические синхронизирующие двигатели постоянного тока служат портативным приложениям или когда требуются высокое ускорение и низкие колебания скорости. Хотя требуется механический или электрический регулятор скорости в той или иной форме, такие электродвигатели обладают следующими преимуществами:
- КПД от 50 до 70 процентов
- Пусковой крутящий момент в 10 раз превышает рабочий крутящий момент
- Относительно легкое регулирование скорости
Серводвигатели переменного тока
Серводвигателииспользуются в сервомеханизмах и компьютерах переменного тока, которые требуют быстрого и точного отклика.Для достижения этих характеристик серводвигатели имеют роторы малого диаметра с высоким сопротивлением. Меньший диаметр обеспечивает низкую инерцию для быстрого пуска, останова и реверсирования. Высокое сопротивление обеспечивает почти линейную зависимость скорости от крутящего момента для точного управления.
Изготовители двигателей на заказ заводят серводвигатели с двумя фазами, физически расположенными под прямым углом или квадратурными в пространстве. Двигатели оснащены фиксированной или опорной обмоткой, которая возбуждается от постоянного источника напряжения. Обмотка управления возбуждается регулируемым или переменным управляющим напряжением, обычно от сервоусилителя.Инженеры проектируют обмотки серводвигателя с одинаковым соотношением напряжения и числа витков, поэтому потребляемая мощность при максимальном фиксированном возбуждении и максимальном сигнале фазы управления сбалансированы.
В идеальном серводвигателе крутящий момент на любой скорости прямо пропорционален напряжению обмотки управления двигателя. Однако эта взаимосвязь существует только при нулевой скорости из-за присущей асинхронному серводвигателю неспособности реагировать на изменения входного напряжения в условиях небольшой нагрузки.
Собственное демпфирование серводвигателей уменьшается по мере увеличения номинальных значений, и двигатели имеют разумный КПД за счет линейности скорости-момента.Многие серводвигатели большего размера имеют встроенные вспомогательные воздуходувки для поддержания температуры в безопасных рабочих диапазонах. Серводвигатели переменного тока доступны с номинальной мощностью от менее 1 до 750 Вт и размерами от 0,5 до 0,7 дюйма. Большинство серводвигателей переменного тока имеют модульные или встроенные редукторы.
Заинтересованы в линейных двигателях переменного тока? Об их истории, характеристиках и применении читайте здесь.
Sinotech разрабатывает индивидуальные двигатели переменного тока в США и производит их в нескольких местах по всему Тихоокеанскому региону, чтобы снизить ваши затраты и риски.Свяжитесь с нами сегодня и дайте нам знать, как наши услуги по изготовлению двигателей переменного тока могут помочь вам запустить и запустить ваше приложение уже сегодня.
Синхронные двигателии асинхронные двигатели
Электродвигатели бывают сотен размеров, форм и разновидностей, и огромное количество вариантов может парализовать при поиске лучшего варианта.
Первый шаг в поиске любого двигателя – это определение его источника питания; он питается от постоянного или переменного тока? Это разделит варианты на две большие категории: двигатели переменного тока и двигатели постоянного тока, и исключит любые двигатели, которые не будут работать с вашим источником питания.Тем не менее, обе эти категории по-прежнему содержат много типов машин, поэтому эта статья поможет еще больше дифференцировать класс двигателей переменного тока (в нашей статье о бесщеточных и щеточных двигателях постоянного тока рассматриваются основные типы двигателей постоянного тока). Двигатели переменного тока можно разделить на синхронные двигатели и асинхронные двигатели, и в этой статье дается краткое объяснение обоих, а также сравниваются их рабочие характеристики и области применения.
Асинхронные двигатели
Асинхронные двигателисчитаются одними из самых распространенных двигателей переменного тока, используемых сегодня в промышленности.Они были одними из первых изобретенных электродвигателей, поэтому у них было достаточно времени, чтобы их оптимизировать для работы во многих приложениях. Они имеют относительно простую конструкцию, состоящую из внешнего статора и внутреннего ротора, которые взаимодействуют посредством эффекта электромагнитной индукции, создавая механическое вращение. Определенные типы асинхронных двигателей достигают этого вращения по-разному, и, пожалуйста, прочтите наши статьи о двигателях с короткозамкнутым ротором, двигателях с фазным ротором и однофазных промышленных двигателях, чтобы узнать больше.Вообще говоря, цель асинхронных двигателей – пропустить переменный ток через катушки в статоре, которые будут создавать магнитное поле, а частота колебаний источника переменного тока заставит это магнитное поле вращаться. Это вращающееся магнитное поле (RMF) затем будет индуцировать противоположные магнитные поля в роторе (свободно движущийся якорь, прикрепленный к выходному валу) и вызывать полезное вращение.
Эти двигатели также известны как асинхронные двигатели, поскольку частота их переменного тока не совпадает напрямую с числом оборотов выходного вала.Это явление известно как «проскальзывание» и возникает из-за того, что ротор всегда играет в магнитную игру «догонять» с RMF. Наличие проскальзывания означает, что точное время для асинхронных двигателей затруднено. Как было сказано ранее, эти двигатели можно найти в бытовых приборах, электромобилях и даже в крупном механизированном промышленном оборудовании, поскольку они бывают сотнями скоростей, крутящих моментов, напряжений, размеров и форм. Для получения дополнительной информации об этих машинах, узнайте больше в нашей статье об асинхронных двигателях.
Двигатели синхронные
Синхронные двигатели охватывают основы, недоступные для асинхронных двигателей, а именно их «асинхронный» характер. Синхронные двигатели согласовывают выходную частоту вращения с входной частотой переменного тока, что позволяет разработчикам использовать эти двигатели в точно синхронизированных приложениях, таких как часы, прокатные станы, проигрыватели и т. Д. Они достигают этого, соединяя магнитные полюса (пары север-юг в каждом магнитном поле) статора и ротора, так что RMF статора вращает ротор с точной синхронной скоростью.Есть много способов заблокировать эти полюса, и в наших статьях о реактивных двигателях и бесщеточных двигателях постоянного тока приводятся конкретные примеры этих механизмов. Обратите внимание, что бесщеточный двигатель постоянного тока не является двигателем переменного тока; это связано с тем, что синхронные конструкции не обязательно должны получать питание от сети переменного тока, тогда как асинхронные двигатели обычно всегда питаются от сети переменного тока.
Синхронные двигатели не являются самозапускающимися по своей природе, то есть этим двигателям часто требуется пускатель двигателей для разгона их роторов на полную скорость.Эти пускатели не часто используются с асинхронными двигателями, потому что они могут запускаться из состояния покоя без первоначального «толчка». Чтобы узнать больше, смело читайте нашу статью о типах пускателей двигателей. Кроме того, даже несмотря на то, что их скорость является синхронной, скорость синхронных двигателей трудно изменить, и для этого требуется контроллер двигателя переменного тока, чтобы позволить разработчикам регулировать скорость двигателя (дополнительную информацию можно найти в нашей статье о контроллерах двигателей переменного тока). Синхронные двигатели, хотя, как правило, дороже асинхронных двигателей, обладают более высоким КПД (> 90%) и являются отличным выбором для дробилок, мельниц, измельчителей и других низкоскоростных и высокомощных приложений.
Сравнение асинхронных и синхронных двигателей
Поскольку эти два типа двигателей переменного тока по-прежнему довольно широки, в этой статье дается общее сравнение рабочих характеристик каждого типа, чтобы разработчики могли использовать эту информацию для дальнейшего определения машины, наиболее подходящей для их спецификаций. Ниже, в таблице 1, показано качественное сравнение некоторых характеристик, общих для асинхронных двигателей и синхронных двигателей, и показаны преимущества и недостатки каждой конструкции двигателя переменного тока.
Таблица 1: Сравнение асинхронных двигателей и синхронных двигателей.
Характеристики | Асинхронные двигатели | Синхронные двигатели |
Сложность | Простой дизайн | Комплекс |
Самозапускающийся | В целом да | Обычно нет |
Плотность мощности | Среднее значение | Высокая |
КПД | Среднее значение | Высокая |
Регулятор коэффициента мощности | Нет (всегда с запаздыванием) | Да (может опережать и отставать) |
Стоимость | Низкий | Высокая |
Сложность (или ее отсутствие) асинхронных двигателей – лучшее преимущество, которое они имеют перед синхронными конструкциями.Их очень просто производить, эксплуатировать и обслуживать, поэтому асинхронные двигатели в целом дешевле синхронных. И наоборот, реализация синхронной машины требует более сложного ротора, который труднее изготавливать / ремонтировать, и требует дополнительных схем, которые необходимо покупать и устанавливать, чтобы эти двигатели могли работать эффективно.
Как указывалось ранее, асинхронные двигатели обычно самозапускаются, а синхронные – нет. Это означает, что асинхронным двигателям для эффективной работы требуется меньше внешних периферийных устройств, что снижает их стоимость и сложность.
Плотность мощности – это количество мощности (обычно измеряется в лошадиных силах HP или киловаттах кВт), генерируемых на единицу объема двигателя. Синхронные двигатели обычно имеют более высокую удельную мощность, чем асинхронные двигатели сопоставимого размера, что позволяет им обеспечивать большую мощность при меньшем объеме. Это отлично подходит для приложений с ограниченными размерами и является причиной выбора синхронного двигателя над асинхронным.
Синхронные двигатели в некоторых случаях могут достигать КПД> 90% и, как правило, более энергоэффективны, чем асинхронные двигатели.Эффективность зависит от конкретного типа и размера двигателя, но отсутствие скольжения в синхронных двигателях означает, что при преобразовании электрической энергии в механическую энергию теряется меньше энергии.
Коэффициент мощности – это отношение рабочей мощности к полной мощности и выражается в процентах, чтобы показать эффективность распределения мощности и связанные с этим потери. Например: завод должен работать на 1000 кВт (рабочая мощность), а электросчетчик, подключенный к источнику питания, показывает 1250 кВА (полная мощность, которая измеряется в киловольт-амперах, или кВА, и составляет используется для выражения энергии индуктивным нагрузкам, таким как катушки двигателей, провода и т. д.). Таким образом, коэффициент мощности для этого завода составляет 1000/1250 = 0,8 или 80%, что означает, что только 80% тока, подаваемого на завод, используется для полезной работы, а 20% теряется на тепло и другие виды неэффективности. Инженеры могут помочь восстановить эти потери, используя синхронные двигатели, чтобы «опередить» коэффициент мощности или вырабатывать энергию обратно в систему (помните, что двигатели также могут работать как электрические генераторы, если им дано вращение на входе). Часто синхронные двигатели работают в паре с асинхронными двигателями, чтобы скорректировать индуктивные потери мощности асинхронного двигателя, что представляет собой еще одно огромное преимущество синхронных двигателей.
Наконец, общей чертой синхронных и асинхронных двигателей является их ценовое разделение. По причинам, описанным ранее, синхронные двигатели дороже в производстве, внедрении, обслуживании и ремонте, чем асинхронные двигатели. Однако можно утверждать, что их способность к экономии энергии и коррекции коэффициента мощности может компенсировать более высокие начальные затраты. Верно ли это, будет в конечном итоге зависеть от конкретных приложений, но это следует учитывать, поскольку общие затраты жизненного цикла всегда должны быть минимизированы в любом проекте.
Резюме
В этой статье представлено краткое сравнение асинхронных двигателей переменного тока и синхронных двигателей. Для получения информации о других продуктах обратитесь к нашим дополнительным руководствам или посетите платформу Thomas Supplier Discovery Platform, чтобы найти потенциальные источники поставок или просмотреть подробную информацию о конкретных продуктах.
Источники:
- https://geosci.uchicago.edu
- http://nit-edu.org/wp-content/uploads/2019/06/ch-38-Synchronous-motor.pdf
- http: // www.egr.unlv.edu/~eebag/Synchronous%20Generator%20I.pdf
- http://hyperphysics.phy-astr.gsu.edu/hbase/mintage/indmot.html
- http://electricalacademia.com/induction-motor/torque-speed-characteristics-induction-motor/
Прочие изделия для двигателей
Больше от Machinery, Tools & Supplies
Типы электродвигателей – Thomson Lamination Company, Inc.
Электродвигателиможно найти во многих сферах применения: от обычных предметов домашнего обихода до различных видов транспорта и даже передовых аэрокосмических приложений.Здесь мы делимся руководством, которое поможет вам лучше понять доступные варианты.
Электродвигатели и генераторы
Электродвигатели и генераторы представляют собой электромагнитные устройства с обмоткой якоря или ротором, который вращается внутри обмотки возбуждения или статора; однако у них противоположные функции. Генераторы преобразуют механическую энергию в электрическую, а двигатели преобразуют электрическую энергию в механическую.
Два типа электродвигателей
Обмотка возбуждения в электродвигателях обеспечивает электрический ток для создания фиксированного магнитного поля, которое обмотка якоря использует для создания крутящего момента на валу электродвигателя.Различия между различными типами электродвигателей связаны с их уникальной работой, напряжением и требованиями к применению. Существует как минимум дюжина различных типов электродвигателей, но есть две основные классификации: переменного тока (AC) или постоянного тока (DC). То, как обмотки в двигателях переменного и постоянного тока взаимодействуют друг с другом для создания механической силы, создает дополнительные различия в каждой из этих классификаций.
Двигатели постоянного тока
Щеточные двигателиЩеточные двигатели состоят из четырех основных компонентов:
- Статор
- Ротор или якорь
- Кисти
- Коммутатор
Существует четыре основных типа щеточных двигателей, в том числе:
- Двигатели серии . Статор включен последовательно или идентичен ротору, поэтому их токи возбуждения идентичны. Характеристики: используется в кранах и лебедках, большой крутящий момент на низкой скорости, ограниченный крутящий момент на высокой скорости.
- Параллельные двигатели. Катушка возбуждения параллельна (шунтируется) ротору, благодаря чему ток двигателя равен сумме двух токов. Характеристики: используется в промышленности и автомобилестроении, отличное управление скоростью, высокий / постоянный крутящий момент на низких скоростях.
- Кумулятивные составные двигатели. Этот тип сочетает в себе аспекты как последовательного, так и закрытого типов, делая ток двигателя равным сумме как последовательных, так и шунтирующих токов поля. Характеристики: используется в промышленности и автомобилестроении, объединяет преимущества как серийных, так и параллельных двигателей.
- Двигатели постоянного тока (постоянный магнит). Самый распространенный тип щеточных электродвигателей, электродвигатели с постоянным постоянным током, в которых для создания поля статора используются постоянные магниты. Характеристики: используется в коммерческом производстве игрушек и бытовой техники, дешевле в производстве, хороший крутящий момент на нижнем конце, ограниченный крутящий момент на верхнем конце.
Двигатели категории бесколлекторных не имеют коллектора и щеток. Вместо этого ротор представляет собой постоянный магнит, а катушки находятся на статоре. Вместо того, чтобы управлять магнитными полями на роторе, бесщеточные двигатели управляют магнитными полями статора, регулируя величину и направление тока в катушках. Одним из основных преимуществ бесщеточных двигателей является их эффективность, которая позволяет лучше контролировать и производить крутящий момент в более компактной сборке.
Двигатели переменного тока
Двигатели, относящиеся к классификации двигателей переменного тока, бывают синхронными или асинхронными, которые в первую очередь различаются по скорости ротора относительно скорости статора. Скорость ротора относительно статора в синхронном двигателе равна, но скорость ротора меньше, чем его синхронная скорость в асинхронном двигателе. Кроме того, синхронные двигатели имеют нулевое скольжение и требуют дополнительного источника питания, в то время как асинхронные или асинхронные двигатели имеют скольжение и не требуют вторичного источника питания.
Синхронный двигательСинхронный двигатель – это машина с двойным возбуждением, то есть он имеет два электрических входа. В обычном трехфазном синхронном двигателе один вход, обычно трехфазный переменный ток, питает обмотку статора, создавая трехфазный вращающийся магнитный поток. Питание ротора обычно осуществляется постоянным током, который возбуждает или запускает ротор. Как только поле ротора сцепляется с полем статора, двигатель становится синхронным.
Асинхронный (индукционный)В отличие от синхронных двигателей, асинхронные двигатели позволяют запускать асинхронные двигатели, подавая питание на статор без подачи питания на ротор.Асинхронные двигатели имеют конструкцию с обмоткой или с короткозамкнутым ротором. Вот некоторые примеры асинхронных асинхронных двигателей:
- Индукционные двигатели с конденсаторным пуском. Это однофазный двигатель с ротором и двумя обмотками статора, запускаемый конденсатором. Их использование включает компрессоры и насосы в холодильниках и системах переменного тока с частым запуском и остановом.
- Асинхронные двигатели с короткозамкнутым ротором. Трехфазный источник питания создает магнитное поле в обмотке статора в этом двигателе, который включает в себя ротор с короткозамкнутым ротором, сделанный из листовой стали с высокой проводимостью.Это недорогие, низкие эксплуатационные расходы и высокоэффективные двигатели, используемые в центробежных насосах, промышленных приводах, больших нагнетателях и вентиляторах, станках, токарных станках и другом токарном оборудовании.
- Двигатели с двойным короткозамкнутым ротором. Эти двигатели решают проблемы с низким пусковым крутящим моментом в двигателях с короткозамкнутым ротором. Их конструкция уравновешивает отношение реактивного сопротивления к сопротивлению между внешней и внутренней клеткой, увеличивая пусковой крутящий момент при сохранении общей эффективности.
Щелкните, чтобы развернуть
Идентификация электродвигателя
Выбор двигателя, наиболее подходящего для конкретного применения, зависит от четырех характеристик:
- Мощность и скорость
- Рама двигателя
- Требования к напряжению
- Корпуса и места для установки
Металлическая табличка, прикрепленная к двигателю, содержит важную информацию, относящуюся к этим характеристикам, за исключением информации о корпусе.
Номинальная мощность и скорость электродвигателя
И номинальная мощность, и номинальная частота вращения (об / мин) должны соответствовать требованиям к нагрузке для установленного приложения. Двигатели бывают разных категорий мощности, в том числе: дробные двигатели (от 1/20 до 1 л.с.), встроенные двигатели (от 1 до 400 л.с.) и большие двигатели (от 100 до 50 000 л.с.). Номинальные значения частоты вращения включают 3600 об / мин (2 полюса), 1800 об / мин (4 полюса) и 1200 об / мин (6 полюсов).
Рама электродвигателя
Размер рамы двигателя не указывает на его рабочие характеристики, особенно на номинальную мощность в лошадиных силах.Национальная ассоциация производителей электрооборудования (NEMA) разработала номера корпусов, соответствующие монтажным размерам, с их цифрами, относящимися к их размеру «D» или расстоянию от центра вала до центра нижней части крепления. Как правило, двухзначные метки предназначены для дробных двигателей, но в них могут быть встроены двигатели большей мощности.
Требования к напряжению
Напряжение, частота и фаза – все это часть требований к напряжению. В большинстве случаев в Северной Америке и Европе трехфазные двигатели оснащены дисплеями с двойным напряжением, например 230/460.Стандартная рабочая частота для большинства электродвигателей составляет 60 Гц, хотя в Европе распространены двигатели с частотой 50 Гц. Это изменение в герцах указывает на то, что двигатель будет работать со скоростью 5/6 от нормальной скорости вращения. Фаза – это последний бит информации, включенный в требования к напряжению двигателя, указывающий тип требуемого источника питания, например трехфазный, однофазный и постоянный ток.
Корпуса и монтажные позиции
Информация о корпусе зависит от среды, в которой установлен двигатель.Есть две основные категории корпусов: открытые двигатели и закрытые двигатели.
Открытые двигателиОткрытые двигатели применяются в относительно чистых и сухих помещениях, что важно, поскольку открытые кожухи двигателей обеспечивают циркуляцию воздуха через обмотки.
Закрытые двигателиЭти типы не допускают свободного воздухообмена между внешней и внутренней частью двигателя. Различия в герметичности корпуса и характеристиках охлаждения дополнительно различают типы двигателей закрытого типа, в том числе:
- Полностью закрытый вентилятор с охлаждением (TEFC)
- Полностью закрытые, невентилируемые (TENV)
- Полностью закрытый воздуховод (TEAO)
- Полностью закрытая промывка (TEWD)
- Взрывозащищенные корпуса (EXPL)
- Опасная зона (HAZ)
Найдите электродвигатель, наиболее подходящий для вашего применения
Thomson Lamination Company – ведущий производитель штампованных компонентов для ламинирования двигателей, способный производить большие партии пластин ротора и статора из металлов с высокой проводимостью.
Ознакомьтесь с нашими возможностями по производству ламинации или свяжитесь с нами, чтобы узнать больше о наших решениях для ламинирования с электродвигателем.
Как работает двигатель электромобиля – Easy Electric Life
Что такое электродвигатель?
Двигатель электромобиля работает с использованием физического процесса, разработанного в конце 19 века. Он заключается в использовании тока для создания магнитного поля в неподвижной части машины («статоре»), смещение которого приводит в движение вращающуюся часть («ротор»).Мы более подробно рассмотрим эти две части и многое другое ниже.
Принцип электродвигателя
В чем разница между двигателем и двигателем? Эти два слова часто используются как синонимы. Поэтому важно различать их с самого начала. Несмотря на то, что в настоящее время термин «двигатель» используется как почти синоним, в автомобильной промышленности термин «двигатель» относится к машине, которая преобразует энергию в механическую энергию (и, следовательно, в движение), в то время как «двигатель» выполняет то же самое, но специально использует тепловую энергию. энергия.Поэтому, говоря о преобразовании тепловой энергии в механическую, мы имеем в виду горение, а не электрическое.
Другими словами, двигатель – это тип двигателя. Но мотор – это не обязательно двигатель. В случае с электромобилями, поскольку механическая энергия создается из электричества, мы используем слово «двигатель» для описания устройства, которое заставляет электромобиль двигаться (также известного как тяга).
Как двигатель электромобиля работает внутри электромобиля?
Теперь, когда мы знаем, что мы говорим о двигателях, а не двигателях, как двигатель работает внутри электромобиля?
В наши дни электродвигатели можно встретить во многих бытовых устройствах.Те, которые используют двигатели постоянного тока (DC), имеют довольно простые функции. Двигатель подключен непосредственно к источнику энергии, и его скорость вращения напрямую зависит от силы тока. Хотя эти электродвигатели просты в производстве, они не соответствуют требованиям к мощности, надежности или размеру электромобиля, хотя вы можете обнаружить, что они приводят в действие дворники, окна и другие более мелкие механизмы внутри автомобиля.
Статор и ротор
Если вы хотите понять, как работает электромобиль, вам необходимо ознакомиться с физическими элементами его электродвигателя.И он начинается с понимания принципов работы двух его основных частей: статора и ротора. Разницу между ними легко запомнить: статор неподвижен, а ротор вращается. В двигателе статор использует энергию для создания магнитного поля, которое затем вращает ротор.
Итак, как работает двигатель, когда дело доходит до привода электромобиля ? Для этого мы должны обратиться к двигателям переменного тока (AC), которые требуют использования схемы преобразования для преобразования постоянного тока (DC), подаваемого батареей.Давайте подробнее рассмотрим два разных вида тока.
Электромобиль: переменный ток и постоянный ток
Прежде всего, если вы хотите понять, как работает электродвигатель электромобиля, вам необходимо знать разницу между переменным и постоянным током (электронными токами).
Электричество движется по проводнику двумя путями. Переменный ток (AC) описывает электрический ток, при котором электроны периодически меняют направление. Постоянный ток (DC), как следует из названия, течет в одном направлении.
Аккумулятор в электромобиле работает от постоянного тока. Но когда дело доходит до главного двигателя электромобиля (который обеспечивает тягу для транспортного средства), эта энергия постоянного тока должна быть преобразована в переменный ток через инвертор.
Итак, что происходит, когда эта энергия достигает двигателя? Это зависит от того, используется ли в автомобиле синхронный или асинхронный двигатель.
Типы электродвигателей
В автомобильной промышленности существуют два типа двигателей переменного тока: синхронные и асинхронные.Когда дело доходит до электромобиля, у синхронных и асинхронных двигателей есть свои сильные стороны – один не обязательно «лучше» другого.
Синхронные и асинхронные двигатели
Асинхронный двигатель, также называемый асинхронным двигателем, основан на статоре с электрическим приводом для создания вращающегося магнитного поля. Это влечет ротор в бесконечную погоню, как если бы он безуспешно пытался догнать магнитное поле. Асинхронный двигатель часто используется в электромобилях, которые в основном используются для движения на повышенных скоростях в течение длительных периодов времени.
В синхронном двигателе ротор сам действует как электромагнит, активно участвуя в создании магнитного поля. Таким образом, его скорость вращения прямо пропорциональна частоте тока, который питает двигатель. Это делает синхронный двигатель идеальным для городского движения, которое обычно требует регулярной остановки и запуска на низких скоростях.
И синхронные, и асинхронные двигатели работают в обратном порядке, что означает, что они могут преобразовывать механическую энергию в электричество во время замедления.Это принцип рекуперативного торможения , который происходит от генератора переменного тока.
Части электродвигателей
Давайте теперь подробнее рассмотрим некоторые из различных частей двигателя электромобиля: от магнитов электродвигателей или синхронных двигателей с внешним возбуждением (EESM) до силового агрегата в целом.
Постоянные магниты
В некоторых синхронных двигателях в качестве ротора используется двигатель с постоянными магнитами. Эти постоянные магниты встроены в стальной ротор, создавая постоянное магнитное поле.Преимущество постоянного электромотора в том, что он работает без источника питания, но требует использования металлов или сплавов, таких как неодим или диспрозий. Эти «редкоземельные элементы» являются ферромагнитными, что означает, что они могут быть намагничены, чтобы стать постоянными магнитами. Они используются в различных промышленных целях: от ветряных генераторов, аккумуляторных инструментов и наушников до велосипедных динамо-машин и… тяговых двигателей для некоторых электромобилей!
Проблема в том, что цены на эти «редкие земли» очень волатильны.Несмотря на свое название, на самом деле они не обязательно такие редкие, но встречаются почти исключительно в Китае, который, следовательно, имеет квазимонополию на их производство, продажу и распространение. Это объясняет, почему производители упорно трудятся над поиском альтернативных решений для двигателей электромобилей.
Синхронные двигатели с внешним возбуждением
Одно из этих решений, используемое Renault для New ZOE, включает изготовление магнита электродвигателя из медной катушки. Это требует более сложного производственного процесса, но позволяет избежать проблем с питанием при сохранении отличного соотношения между массой двигателя и передаваемым крутящим моментом.
Гийом Фори, руководитель отдела проектирования завода Renault Cléon во Франции, дает представление о сложности и изобретательности двигателя New ZOE: «Производство EESM требует специальных процессов намотки катушек и пропитки. Ограничения ожидаемых характеристик продукта, цель снижения отношения веса к мощности и высокая скорость производства требуют от нас эффективного использования самых современных технологий для выполнения этих процессов ».
Электрическая трансмиссия
В электромобиле двигатель, состоящий из ротора и статора, является частью более крупного блока, электрической трансмиссии , ансамбля, который заставляет электродвигатель работать.
Также в этом устройстве, контроллер Power Electronic (PEC) объединяет всю силовую электронику, отвечающую за управление питанием двигателя и зарядку аккумулятора. Наконец, он включает в себя редукторный двигатель, часть, отвечающую за регулировку крутящего момента и скорости вращения, передаваемых двигателем на колеса.
Вместе эти элементы обеспечивают плавную и эффективную работу электродвигателя. И результат? Ваш электромобиль бесшумный, надежный, дешевле, и приятно водить!
Авторские права: Pagecran
Читайте также
Электромобиль
Различные способы хранения энергии
10 июня 2021
Посмотреть большеЭлектромобиль
Все, что нужно знать о подключаемом к сети гибридном автомобиле
10 июня 2021
Посмотреть большеЭлектромобиль
Все, что нужно знать о зарядке гибридных автомобилей с подзарядкой от сети
09 июня 2021
Посмотреть больше Электродвигатели– Torqeedo
Для различения электродвигателей используются пять критериев:
- Частотные характеристики
- Генерация переменного поля (коммутация)
- Возбуждение магнитного поля
- Конструктивное проектирование
- Направление магнитного поля относительно оси вращения
В зависимости от частотных характеристик различают
Двигатели асинхронные
Отношение скорости двигателя к частоте напряжения питания непостоянно, но изменяется в зависимости от состояния нагрузки машины.Чем выше нагрузка, тем выше разница скоростей – так называемое «проскальзывание», т.е. заданная скорость гребного винта не будет поддерживаться, когда сопротивление потоку больше. Таким образом, тяга недоступна в тот момент, когда она необходима.
Двигатели синхронные
Для этого типа двигателя отношение скорости двигателя к частоте напряжения питания постоянно. Как правило, синхронные двигатели управляются по крутящему моменту. Поэтому они всегда потребляют столько тока, сколько им необходимо для обеспечения необходимого крутящего момента при желаемой скорости двигателя.По этой причине они являются предпочтительным выбором для использования в областях с особенно высокими требованиями к крутящему моменту. Если двигателю требуется больше мощности для поддержания заданной скорости гребного винта, он автоматически потребляет больше тока.
>> Двигатели Torqeedo всегда являются синхронными двигателями
В зависимости от типа генерации переменного поля (коммутации) разница между
Двигатели с механической коммутацией
Двигатели с дополнительными щетками создают переменное поле, необходимое для работы двигателя, посредством скользящих контактов. Благодаря своему геометрическому расположению эти “щетки” переключают ток в зависимости от положения ротора.Основным недостатком этих двигателей является износ щеток, который приводит к значительным накладным расходам на техническое обслуживание. Контактное сопротивление также вызывает потерю щетки, что снижает эффективность двигателя.
Двигатели с электронной коммутацией
Двигатель этого типа генерирует необходимое переменное поле посредством электрического переключения, «преобразователя частоты». Отсутствуют потери щеток и двигатели не требуют обслуживания. Только в последние несколько лет значительные достижения в области электронных силовых компонентов и схемотехники позволили производить эти высокопроизводительные двигатели по доступной цене.
>> Двигатели Torqeedo – это всегда двигатели с электронной коммутацией и специальной силовой электроникой.
В зависимости от типа возбуждения магнитного поля электродвигатели подразделяются на
Двигатели с электромагнитным возбуждением
Этот тип двигателя генерирует необходимое магнитное поле с помощью поля второй катушки. Это делает двигатель дешевым, но за счет большего объема и веса по сравнению с двигателем с возбуждением от постоянного магнита, а также приводит к значительно более высокому энергопотреблению и более низкому КПД.
Двигатели с возбуждением от постоянных магнитов
Постоянные магниты создают необходимое магнитное поле в этом типе двигателя. Это позволяет избежать потери производительности из-за катушки возбуждения.
>> Двигатели Torqeedo всегда возбуждаются постоянными магнитами
В зависимости от конструкции говорят о
- Внутренние роторы:
В этой классической конструкции электродвигателя ротор окружен статором.Ротор – это часть двигателя, которая вращается, соединяется с валом двигателя и также называется якорем. Поскольку у внутреннего ротора катушки находятся снаружи, двигатель имеет преимущества в отношении охлаждения. Однако по сравнению с другими конструктивными решениями он создает относительно низкий крутящий момент. - Дисковый ротор:
Он создает крутящий момент (сила x рычаг), располагая ось магнитного поля параллельно валу, а не радиально валу. Это позволяет реализовать геометрию, в которой электромагнитная сила генерируется далеко от оси, создавая больший крутящий момент с той же силой.Подвесные моторы с прямым водяным охлаждением имеют недостаток в виде дискового ротора. Двигатели с дисковым ротором не могут быть установлены непосредственно на пилоне из-за их очень большого диаметра. - Внешние роторы:
Это самая современная конструкция двигателя с катушками, расположенными внутри. Магниты расположены на вращающемся снаружи колоколе. Таким образом, двигатели с внешним ротором развивают значительно больший крутящий момент, чем двигатели с внутренним ротором той же конструкции.
>> Двигатели Torqeedo обычно представляют собой двигатели с внешним ротором
В зависимости от направления магнитного поля люди говорят о
Двигатели с радиальным магнитным потоком
В этом случае магнитное поле вертикально по отношению к оси вращения. Вращательное движение происходит из-за бокового смещения (угла поворота) между статором и ротором.
Двигатели с поперечным потоком
Магнитное поле в основном параллельно оси вращения. Вращательное движение также происходит из-за бокового смещения (угла поворота) между статором и ротором.Двигатели с поперечным магнитным потоком требуют трехмерного управления магнитным потоком и поэтому являются сложными.
>> Двигатели Torqeedo обычно представляют собой двигатели с радиальным магнитным потоком
.