
принцип работы, виды и основное применение
Энкодер (заимствованное зарубежное слово encoder), означает преобразователь. Сегодня это название объединяет целый класс изделий, получивших широкое распространение в автоматизации промышленных процессов. В качестве устройства контроля положения выделяют две основные группы по назначению: угловые (rotary, angular) и линейные (linear encoder). В отечественной технической и конструкторской литературе чаще встречаются следующие названия: датчик обратной связи (ДОС), преобразователь угловых / линейных перемещений, датчик угла поворота (ДУП), датчик положения, шифратор, кодировщик. Также популярны названия на английском: transducer, sensor. В немецкой документации: drehgeber (если угловой), line geber (если линейный).
Объединив все эти понятия, можно сказать, что энкодером называют устройство, которое преобразовывает механическое перемещение (линейное движение или вращение) посредством изменения физических величин (проходящий свет, магнитное или индуктивное поле) в последовательность сигналов. Формируемый на выходе электрический сигнал может быть аналоговым или цифровым. Он несет в систему управления верхнего уровня информацию о величине, направлении, скорости, перемещения, положении объекта.
Формируемый на выходе электрический сигнал может быть аналоговым или цифровым. Он несет в систему управления верхнего уровня информацию о величине, направлении, скорости, перемещения, положении объекта.
Принцип работы энкодера
Как обеспечивается работа устройства лучше всего видно, если заглянуть «внутрь». Рассмотрим типовую и самую распространенную схему построения преобразователя – оптоэлектронную с подшипниковым узлом. На рисунке ниже представлен оптический многооборотный абсолютный датчик с цельным валом.
Здесь видны практически все основные узлы современного изделия:
- – вал энкодера
- – фланец (на данном рисунке представлен зажимной тип)
- – фотоприемник инфракрасного (ИК) света
- – оптический диск с растрами (метками, если инкрементный) или кодовыми дорожками (если абсолютный)
- – ИК осветитель (LED) с линзой на плате
- – механический редуктор с зубчатыми колесами (многооборотный модуль)
- – плата обработки сигнала с выходными формирователями и конверторами интерфейса.

Элементы 1, 2, 4 формируют оптико-механический подшипниковый узел. Оптический диск (лимб) 4 может быть стеклянным, металлическим, пластиковым. В зависимости от производителя бывают конструкции, где элементы 3 и 5 поменяны местами. Механический редуктор 6 встречается только у многооборотных абсолютных преобразователей.
На рисунке выше показана работа энкодера:
- ИК свет от источника 5 проходит через кодовый диск 4, и попадает на приемник (фото матрицу) 3
- Фотоприёмник имеет нанесенную на чувствительном элементе или расположенную над ним маску (индикаторную пластину), которая также имеет «окошки», как на вращающемся диске
- Из-за поочередного перекрытия и открытия окошек маски в процессе вращения вала датчика, проходящий свет имеет аналоговую структуру. Нет света -> нарастает -> максимум света -> убывает -> нет света
- Это регистрирует фото сенсор
- Далее аналоговый сигнал с приемника преобразуется платой обработки 7 в необходимые для дальнейшей передачи информации импульсы.
Виды энкодера
Основные типы, которые на слуху у всех специалистов, занимающихся автоматизацией:
- абсолютные (absolute) – всегда знают свое положение
- инкрементные (incremental) – относительные, считают только при включенном питании и вращении.
С развитием технологии, абсолютные энкодеры занимают все более прочные позиции на рынке. Если раньше соотношение было 70 на 30 и даже 80 на 20 % в пользу икнрементальных, то теперь их позиции равны. А в некоторых отраслях абсолютные преобладают.
Отдельно здесь можно выделить многооборотные энкодеры. Которые не только «запоминают» позицию внутри оборота, но и знают на каком обороте находятся. Количество оборотов зависит от используемого многооборотного модуля. У редукторного механического модуля количество регистрируемых оборотов как правило ограничено 12 (4096) или 14 битами (16384). У модуля со встроенной в энкодер батарейкой – до 18 (262144) и более бит. Многооборотный модуль, построенный на сенсорах Виганда, считает до 31 (2147483648) бит оборотов.
По конструкции выделяют угловые преобразователи следующих типов:
- С полым валом (hollow shaft):
- Сквозным (thru hollow)
- Глухим (тупиковым)(blind hollow).
- С цельным валом (solid shaft) с:
- Cинхро фланцем (synchro flange)
- Зажимным (clamping)
- Квадратным (square)
- Пилотным (pilot).
Самое полное портфолио энкодеров на рынке вы найдете на сайте f-enco.ru
Применение энкодера
Области применений сегодня настолько обширны, что преобразователь перемещений можно встретить в принтере, метро, самолете, трамвае, строительном кране, лифте, даже на продвинутом дачном участке в качестве датчика открывания ворот. Ниже представлен далеко не полный список применений, где датчики обратной связи получили наибольшее распространение:
- Автоматизация производств
- Упаковка
- Текстильное производство
- Производство продуктов питания и напитков
- Промышленные роботы
- Медицинская техника
- Томографы
- Роботы-хирурги
- Строительная и карьерная техника
- Передвижные буровые станции
- Карьерные самосвалы
- Передвижные краны
- Промышленные задвижки и регулирование уровня воды
- Радиальные и барабанные ворота
- Вертикальные шлюзы
- Автоматические трубопроводные задвижки
- Лифты
- Пассажирские
- Грузовые
- Хранение и перемещение грузов
- Автоматизированные склады
- Автопогрузчики
- Портовые краны
- Багажные ленты
- Ножничные подъемники
- Альтернативная энергетика
- Ветряные генераторы
- Солнечные батареи
- Станкостроение и модернизация станков
- Универсальные станки
- Станки с ЧПУ
- Сервомоторы
Популярные категории:
- Оборудование
Все категории
Типы выходных сигналов энкодеров
На основе анализа технической документации производителей энкодеров, в частности, можно предложить следующую классификацию инкрементных энкодеров по типам выходных каскадов. 1. Выход по напряжению (Voltage Output). Выходной сигнал с уровнем напряжения, определяемого величиной напряжения питания энкодера, можно напрямую подавать на измерительную схему. Ток нагрузки в данном случае составляет не более десятка миллиампер. При подключении сигнала энкодера к нескольким устройствам одновременно (например, к ПЛК и частотному преобразователю) нельзя превышать допустимую нагрузочную способность выходного каскада. Недостатком этого типа выхода является большое выходное сопротивление в закрытом состоянии транзистора VT1, определяемое сопротивлением в цепи коллектора, составляющим порядка тысяч Ом. Как следствие, ток, отдаваемый в нагрузку, уменьшается, и увеличивается время заряда ёмкости нагрузки, что снижает общее быстродействие.
1. Выход по напряжению (Voltage Output). Выходной сигнал с уровнем напряжения, определяемого величиной напряжения питания энкодера, можно напрямую подавать на измерительную схему. Ток нагрузки в данном случае составляет не более десятка миллиампер. При подключении сигнала энкодера к нескольким устройствам одновременно (например, к ПЛК и частотному преобразователю) нельзя превышать допустимую нагрузочную способность выходного каскада. Недостатком этого типа выхода является большое выходное сопротивление в закрытом состоянии транзистора VT1, определяемое сопротивлением в цепи коллектора, составляющим порядка тысяч Ом. Как следствие, ток, отдаваемый в нагрузку, уменьшается, и увеличивается время заряда ёмкости нагрузки, что снижает общее быстродействие.
2. Выход с открытым коллектором (Open Collector). Такой тип выхода позволяет получить сигнал с уровнем напряжения, определяемым не величиной напряжения питания энкодера, а величиной напряжения дополнительного источника питания. Для этого необходимо между цепями питания ((/пит) и выходом подключить внешний резистор, величина сопротивления которого определяется значением напряжения дополнительного источника питания.
Также возможно включение нагрузки между выходом энкодера и дополнительным источником питания. Ток нагрузки (/ ) в этом случае сохода с открытым коллектором позволяет также подключать при необходимости несколько энкодеров к одному счётному входу.
3. Двухтактный (каскадный, комплементарный) выход (Push—Pull, Totem Pole). Этот тип выхода построен на транзисторах рахпичной (п-р-п и р-п-р) проводимости и имеет малое выходное сопротивление (как в состоянии логического нуля, так и в состоянии логической единицы), что позволяет увеличить ток, отдаваемый в нагрузку. Таким образом повышается нагрузочная способность и ускоряются процессы заряда и разряда ёмкости нагрузки, а следовательно, растёт быстродействие.
4. Дифференциальный выход (Line Driver, RS-422). В данном случае помимо основного добавляется второй выход, осуществляющий инверсию выходного сигнала. Для обработки двух сигналов необходимо иметь соответствующий приёмник в измерительной схеме (рис. 7). Такой тип выхода используется в условиях, для которых высока вероятность возникновения помехи и можно ожидать наводок на сигнальные провода, или при очень длинных соединительных проводах.
Значение уровня выходных сигналов для некоторых типов выходов инкрементных энкодеров может также обозначаться как TTL (соответствует напряжению питания 5 В) или HTL (соответствует напряжению питания в дипазоне от 10 до 24 В). Обычно для подачи сигналов на дискретные входы ПЛК используются сигналы с напряжением 24 В.
16.01.2014
« Формирование импульсов инкрементным энкодером
Подключение энкодера к ПЛК »
Добавить страницу в мои закладки:
Что вы чаще всего делаете в Интернете?
- В основном, ищу нужную информацию
- Читаю новости, блоги
- Работаю
- Играю в онлайн игры, скачиваю кино и музыку, развлекаюсь
- Общаюсь в социальных сетях
Загрузка …
#02 Типы и механизм энкодера | Учебники | Датчики угла поворота | Продукты
#02
Типы и механизм энкодера
Основные сведения о энкодере
Это вторая часть серии, в которой систематизированы и представлены знания, которые мы приобрели.
Тем, кто хочет изучать энкодеры, тем, кто не имеет дела с энкодерами, но хочет знать, в чем заключается работа. Мы хотим помочь этим людям.
Содержание
2-1. Каков механизм обнаружения поворота и угла?
2-2. Какая физическая величина изменяется при вращении?
2-3. Какие типы информации о повороте и угле доступны?
Столбец 1. Энкодер для обнаружения линейного смещения
Сводка
- Энкодер определяет вращение объектов как величину физического изменения сенсорным элементом и, наконец, передает информацию о вращении/угле наружу в виде электрического сигнала.
- Энкодер подразделяется на четыре типа: механический, оптический, магнитный и с электромагнитной индукцией.
- Существует четыре типа информации, необходимой для вращения двигателя с высокой точностью: величина вращения, скорость вращения, направление вращения и положение вращения.
2-1. Каков механизм обнаружения поворота и угла?
Рисунок 1. Процесс преобразования вращательного движения во вращательную информацию
Процесс преобразования вращательного движения во вращательную информацию
В первой части мы упомянули, что энкодер — это датчик, определяющий угол поворота, линейное перемещение и скорость. Датчик – это элемент или электронный компонент, который улавливает изменения природных явлений. Например, оптический датчик определяет включение/выключение света, а магнитный датчик определяет распределение магнитного поля.
Датчик выполняет следующие функции. Путем вывода обнаруженного изменения физической величины в виде электрического сигнала информация может быть передана наружу. Как показано на рисунке 1, энкодер обрабатывает электрический сигнал, выдаваемый сенсорным элементом, и, наконец, отправляет информацию о вращении/угле наружу в виде цифрового или аналогового электрического сигнала.
2-2. Какая физическая величина изменяется при вращении?
Разница в измеряемой физической величине означает разницу в методе обнаружения датчика, поэтому это важный компонент, определяющий преимущества и недостатки энкодеров.
Энкодеры подразделяются на следующие четыре типа в зависимости от метода обнаружения.
Механический тип (контактный)
Рис. 2. Схема механического (контактного) энкодера
Этот метод определяет положение вращения с помощью переменного резистора, электрическое сопротивление которого изменяется пропорционально углу поворота. Такой механический энкодер обычно называют потенциометром.
При перемещении ползунка на резисторах значение сопротивления потенциометра изменяется пропорционально расстоянию перемещения ползунка.
Оптический тип
Это метод, в котором датчик света используется для определения того, проходит ли свет через щель в радиальном направлении вращающегося диска, называемого кодовым колесом, прикрепленным к валу двигателя.
Сигнал светового импульса изменяется при прохождении через щель, и величину вращения вала двигателя можно определить, подсчитав количество импульсов. Мы объясним принцип работы и особенности в части 4.
Мы объясним принцип работы и особенности в части 4.
Рисунок 3. Схема оптического энкодера
Магнитный тип
Рисунок 4. Схема магнитного энкодера
В этом методе используется магнитный датчик для измерения изменений в распределении магнитного поля, создаваемого постоянным магнитом, прикрепленным к валу двигателя.
При вращении двигателя меняется и распределение магнитного поля постоянного магнита, поэтому, обнаружив его с помощью магнитного датчика, можно определить положение вращения вала двигателя. Мы объясним принцип работы и особенности в части 5.
Тип электромагнитной индукции
Этот метод считывает изменения в магнитном поле, создаваемом между индукционной катушкой (катушка возбуждения) и неподвижной катушкой (катушка обнаружения), прикрепленной к валу двигателя.
Основной принцип такой же, как у трансформатора, использующего электромагнитную индукцию, и такой энкодер называется резольвером.
Источник питания вращающейся индукционной катушки резольвера имеет риск износа из-за контактного метода с использованием щетки. Однако существует преобразователь VR (переменное реактивное сопротивление), который снижает этот риск.
Рис. 5. Схема датчика электромагнитной индукции
2-3. Какие типы информации о повороте и угле доступны?
Каково состояние вращения?
На примере двигателя он останавливается, вращается по часовой стрелке, вращается против часовой стрелки, вращается с постоянной скоростью, ускоряется, замедляется и т. д.
Существует четыре типа информации, необходимых для точного понимания этих условий и точного вращения двигателя.
Количество оборотов
Рисунок 6. Объяснение величины вращения
Это информация о том, сколько раз угол вала двигателя изменился.
Например, в бесщеточном двигателе постоянного тока можно узнать величину вращения ротора, обнаружив изменения в магнитных полюсах ротора, и эффективно вращать двигатель.
Скорость вращения
Это информация о скорости вращения вала двигателя.
Как я упоминал в первом эпизоде, серводвигатель определяет скорость вращения бесщеточного двигателя постоянного тока или двигателя переменного тока и выполняет управление с обратной связью, чтобы вал двигателя вращался со скоростью, заданной сервоусилителем.
Направление вращения
Это информация о том, в каком направлении (по часовой или против часовой стрелки) вращался вал двигателя.
В системе, определяющей количество оборотов вала двигателя по количеству импульсов, выдаваемых энкодером, если направление вращения не может быть распознано, количество оборотов подсчитывается неправильно.
Рисунок 7. По часовой стрелке и против часовой стрелки
Положение вращения
Это информация о том, сколько градусов составляет угол наклона вала двигателя.
Как мы упоминали в первой части, серводвигатели и шаговые серводвигатели используют энкодеры для определения угла поворота и управления с обратной связью, оценивая, достигнут ли целевой угол поворота. В результате управление позиционированием осуществляется с высокой точностью.
В результате управление позиционированием осуществляется с высокой точностью.
Резюме
- Энкодер определяет вращение объектов как величину физического изменения сенсорным элементом и, наконец, передает информацию о вращении/угле наружу в виде электрического сигнала.
- Энкодер подразделяется на четыре типа: механический, оптический, магнитный и с электромагнитной индукцией.
- Существует четыре типа информации, необходимой для вращения двигателя с высокой точностью: величина вращения, скорость вращения, направление вращения и положение вращения.
Как это было?
В этой части мы рассказали, что существует четыре типа энкодеров с разными принципами работы в зависимости от определяемой физической величины. Мы также представили, что существует четыре типа информации о вращении, необходимой для вращения двигателя с высокой точностью. Надеюсь, вы понимаете тип и механизм энкодера.
В следующей части мы объясним инкрементный тип и абсолютный тип.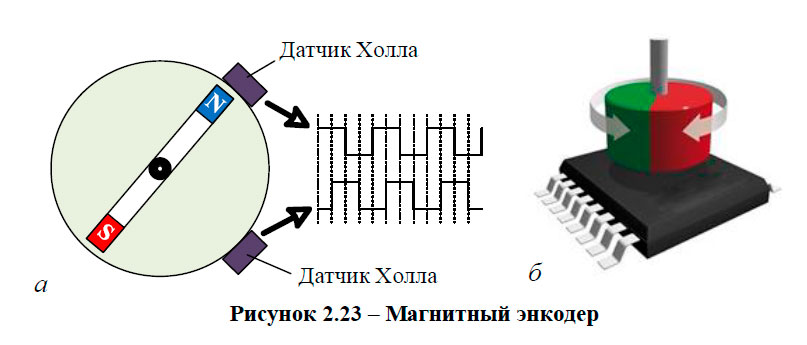
Колонка 1. Энкодер для обнаружения линейного перемещения
В станках, требующих точности позиционирования, таких как фрезерные станки и сверлильные станки, используются энкодеры, определяющие линейное смещение. Существуют следующие два метода обнаружения линейного смещения.
Метод определения линейного смещения с помощью прямого или поступательного датчика линейных перемещений.
Линейный энкодер, также называемый линейной шкалой, состоит из шкалы, служащей линейкой, и головки, определяющей информацию о положении.
Как и в случае с поворотным энкодером, существует два метода обнаружения: оптический метод, использующий отражение света, и магнитный метод, использующий магнетизм.
Рисунок 8а. Оптический линейный энкодер
Рисунок 8б. Магнитный датчик линейных перемещений
Метод преобразования вращательного движения в линейное и определение вращательного смещения с помощью поворотного энкодера.
Механизм, преобразующий вращательное движение шнека в поступательное движение гайки, называется механизмом винтовой подачи. Типичным является шариковый винт. Когда стальной шарик вставляется между валом винта и гайкой и вал винта вращается, гайка движется по прямой из-за качения шарика. Линейное перемещение шарико-винтовой передачи можно определить, используя информацию о положении вращения вала винта и количестве оборотов.
Шарико-винтовые пары используются в станках, измерительных приборах, копировальных аппаратах и принтерах, поскольку они обеспечивают высокую точность позиционирования.
Рисунок 9. Схема механизма винтовой подачи
Базовые знания кодировщика
#02
СВИТОК
В чем разница между абсолютным и инкрементным энкодером?
В предыдущем уроке мы обсуждали, что такое кодировщик и как его можно реализовать в вашем приложении. В этой статье мы обсудим разницу между абсолютным и инкрементным энкодером и какой из них можно использовать для какой функции.
В этой статье мы обсудим разницу между абсолютным и инкрементным энкодером и какой из них можно использовать для какой функции.
Типы и технологии энкодеров
Существует множество различных типов энкодеров, но в основном они делятся на два основных метода измерения. Это:
– Линейный
– Поворотный
В рамках этих категорий существуют различные типы измерений энкодеров, такие как:
– Абсолютный
– Инкрементальный
Существуют также различные электромеханические технологии, такие как:
– Магнитный
– Оптический
– Индуктивный 9 0004
– Емкостный
– Лазер
Существует огромное количество информации о энкодерах, и вам может показаться, что с ней сложно разобраться.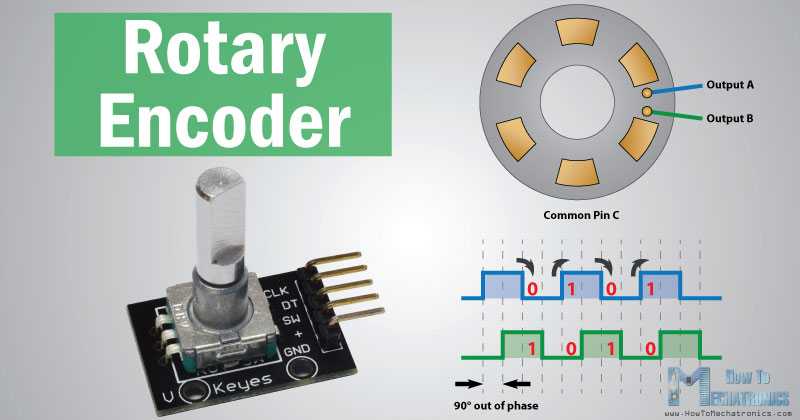
Описания, такие как поворотный или линейный, оптический и магнитный, абсолютный и инкрементный.
Мы коснемся нескольких основ, чтобы помочь вам понять, что к чему и почему.
Давайте сначала немного разберем эти категории и объясним пару из множества конфигураций.
1. Линейный энкодер
Во-первых, линейный энкодер использует датчик для измерения расстояния между двумя точками. Эти энкодеры могут использовать стержень или кабель, который проходит между датчиком энкодера и объектом, движение которого будет измеряться.
По мере движения объекта данные датчика, собранные со стержня или кабеля, создают выходной сигнал, линейный по отношению к движению объекта.
При измерении расстояния линейный энкодер использует эту информацию для определения положения объекта.
Примером использования линейного энкодера является фрезерный станок с ЧПУ, где для точности производства требуются точные измерения перемещений.
Линейные энкодеры могут быть «абсолютными» или «инкрементальными». Мы коснемся абсолютных и инкрементальных измерений чуть позже в этой статье.
Мы коснемся абсолютных и инкрементальных измерений чуть позже в этой статье.
2. Вращающийся (валовой) энкодер
Вращающийся энкодер собирает данные и обеспечивает обратную связь на основе вращения объекта или, другими словами, вращающегося устройства.
Угловые энкодеры иногда называют «валовыми энкодерами». Этот тип энкодера может преобразовывать угловое положение или движение объекта на основе вращения вала, в зависимости от используемого типа измерения.
«Абсолютные датчики вращения » могут измерять «угловые» положения, а «Инкрементальные датчики вращения » могут измерять такие параметры, как расстояние, скорость и положение.
Поворотные энкодеры используются в самых разных областях применения, таких как компьютерные устройства ввода, такие как мыши и трекболы, а также робототехника.
Энкодеры вращения или вала, как указано ранее, могут быть «абсолютными» или «инкрементными».
3. Датчик положения
Следующий датчик, который является датчиком положения, используется для определения механического положения объекта. Эта механическая позиция является «абсолютной позицией».
Эта механическая позиция является «абсолютной позицией».
Они также могут использоваться для определения изменения положения между энкодером и объектом. Изменение положения по отношению к объекту и кодировщику будет постепенным изменением.
Датчики положения широко используются в промышленности для определения положения инструмента и многоосевого позиционирования.
Датчик положения также может быть абсолютным или инкрементным.
4. Оптический энкодер
«Оптические» энкодеры интерпретируют данные в виде световых импульсов, которые затем можно использовать для определения положения, направления и скорости.
Вал вращает диск с непрозрачными сегментами, которые представляют определенный узор. Эти энкодеры могут определять движение объекта для «вращательных» или «валовых» приложений, определяя точное положение в «линейных» функциях.
Оптические энкодеры используются в различных приложениях, таких как принтеры, фрезерные станки с ЧПУ и робототехника.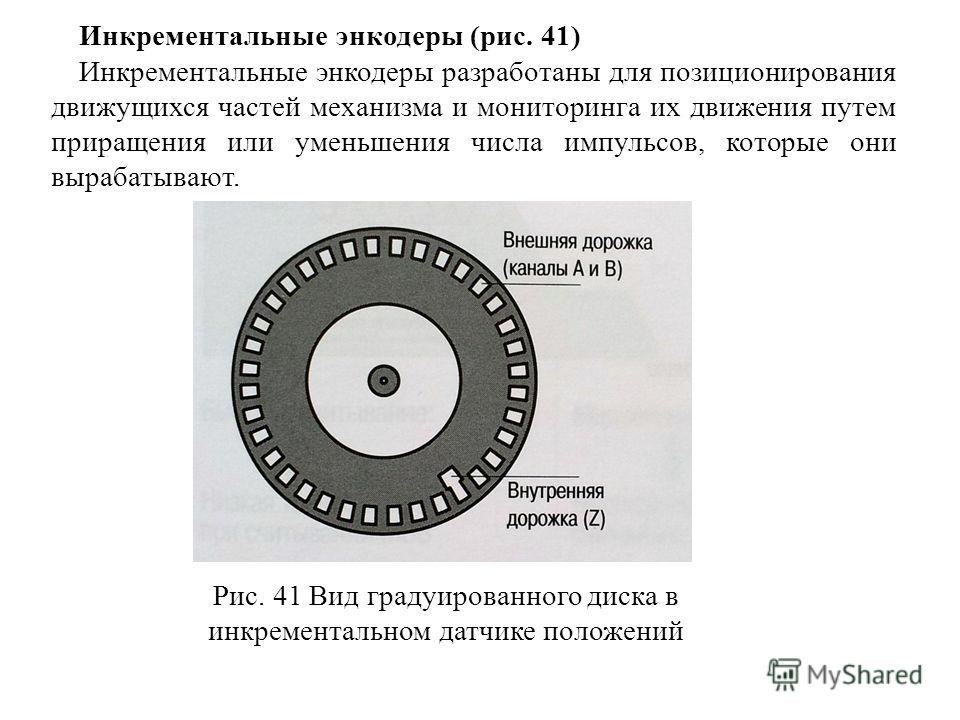
Опять же, эти энкодеры могут быть абсолютными или инкрементными.
После объяснения основных групп вы можете увидеть закономерность.
Все энкодеры в основном делают одно и то же, производят электрический сигнал, который затем можно преобразовать в положение, скорость, угол и т. д. обсудите разницу между абсолютными и инкрементными измерениями.
Чтобы обсудить разницу между абсолютными и инкрементальными измерениями, мы будем использовать в качестве примера тип поворотного энкодера.
В поворотном энкодере с «абсолютным» типом измерения диск с прорезями на валу используется в сочетании со стационарным датчиком. Когда вал вращается, создается уникальный кодовый рисунок. Это означает, что каждое положение вала имеет шаблон, и этот шаблон используется для определения точного положения.
Если питание энкодера было отключено, а вал вращался, то при возобновлении питания энкодер запишет абсолютное положение, демонстрируемое уникальной последовательностью, передаваемой диском и принимаемой звукоснимателем.
Этот тип измерения предпочтителен в приложениях, требующих высокой степени уверенности, например, когда безопасность является первостепенной задачей. Потому что кодировщик всегда знает свое окончательное положение на основе созданного уникального шаблона.
Абсолютные энкодеры могут быть
– Однооборотные
или
– Многооборотные
«Однооборотные» энкодеры используются для измерений на коротких расстояниях, а «многооборотные» больше подходят для измерений на больших расстояниях и более сложные требования к позиционированию.
Для инкрементальных энкодеров выходной сигнал создается каждый раз, когда вал поворачивается на измеряемую величину. Затем этот выходной сигнал интерпретируется на основе количества сигналов на оборот.
Инкрементальный энкодер начинает отсчет с нуля при включении питания. В отличие от абсолютных энкодеров, здесь нет никаких гарантий относительно положения.
Поскольку инкрементный энкодер начинает отсчет с нуля при запуске или сбое питания, необходимо определить контрольную точку для всех задач, требующих позиционирования.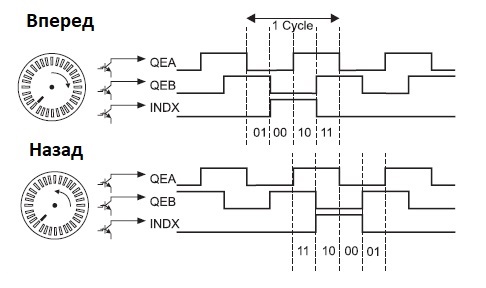
Кодировщики в приложениях для подсчета
В предыдущей статье при описании использования кодировщика для подсчета этот пример является хорошим примером инкрементного кодировщика.
Предположим, что питание не было отключено, и вы включили конвейер и перевели машину в режим настройки.
Пока энкодер вращается, контроллер получает отсчеты. Допустим, диапазон счета от 0 до 10000.
Это инкрементальный энкодер, поэтому абсолютное положение неизвестно, мы просто знаем, что полный оборот вала регистрирует счет 10000.
Мы поместим объект на конвейер, и, как только входной фотоглазок обнаружит объект, будет зафиксирован текущий отсчет энкодера. Допустим, это число 5232.
Затем мы зафиксируем отсчет с выходом объекта и его обнаружением выходным фотоглазком. Скажем, что это число равно 6311. Итак, чтобы определить количество полного перемещения, мы вычтем 5232 из 6311 и определим, что перемещение объекта составляет 1079 отсчетов.
На этом примере очевидно, что мы не знаем абсолютного местоположения объекта, мы просто знаем, что количество поездок от входа до выхода составляет 1079.
