
Расчетные формулы основных параметров асинхронных двигателей
В таблице 1 представлены расчетные формулы для определения основных параметров асинхронных двигателей.
В данной таблице собраны все формулы, которые касаются расчета параметров асинхронных двигателей.
Используя формулы из данной таблицы, вам больше не придется искать нужную формулу в различных справочниках.
Таблица 1 — Расчетные формулы для определения основных параметров асинхронных двигателей
| Наименование величин | Формулы | Принятые обозначения |
|---|---|---|
| Потребляемая активная мощность из сети, кВт | U1, I1 – линейные значения напряжения, В и тока двигателя, А; cosϕ – коэффициент мощности; | |
| Потребляемая реактивная мощность, квар | ||
| Полезная мощность на валу, кВт | Ƞ — КПД двигателя; | |
| Потребляемый двигателем ток, А | ||
| Вращающий момент двигателя, кГм | nном.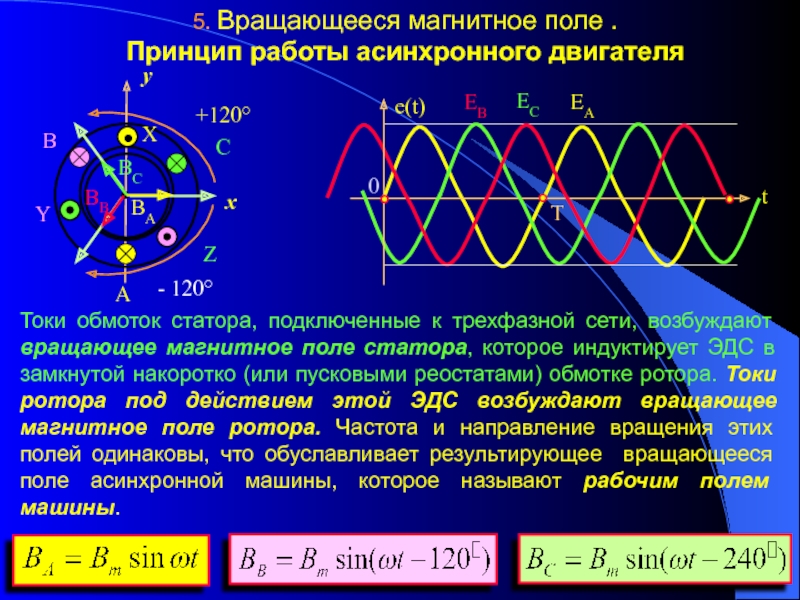 – номинальная скорость вращения ротора, об/мин; – номинальная скорость вращения ротора, об/мин; | |
| Синхронная скорость вращения магнитного поля, об/мин | f1 – частота питающего тока, Гц; р – число пар полюсов машины; | |
| Скольжение двигателя | ||
| Скорость вращения ротора при нагрузке, об/мин | ||
| ЭДС обмоток статора и ротора, В | kоб.1, kоб.2 – обмоточные коэффициенты статора и ротора, равные произведению коэффициентов укорочения kу шага и распределения обмотки kw; kоб. = kу* kw; | |
| Коэффициенты трансформации по напряжению и по току | w1, w2 – числа витков обмоток статора и ротора; m1, m2 – числа фаз в обмотках статора и ротора.  У двигателей с фазным ротором. У двигателей с фазным ротором.m2 = 3 у двигателей с короткозамкнутым ротором; m2 = z2, т.е. числу пазов в роторе. | |
| Параметры схемы замещения | zк, rк, хк – полное, активное и индуктивное сопротивления при КЗ двигателя, Ом; ∆Рк – суммарные потери в меди статора и ротора двигателя, Вт; r1, x1 – активное и индуктивное сопротивления обмотки статора, Ом; r2’, x2’ – активные и индуктивные сопротивления ротора, приведенные к обмотке статора, Ом; | |
| Ток холостого хода, А | Iном. – номинальный ток двигателя, А | |
| Критическое скольжение | sinϕ – коэффициент реактивной мощности; kм – коэффициент перегрузочной способности; | |
| Уравнение вращающего момента | Sном.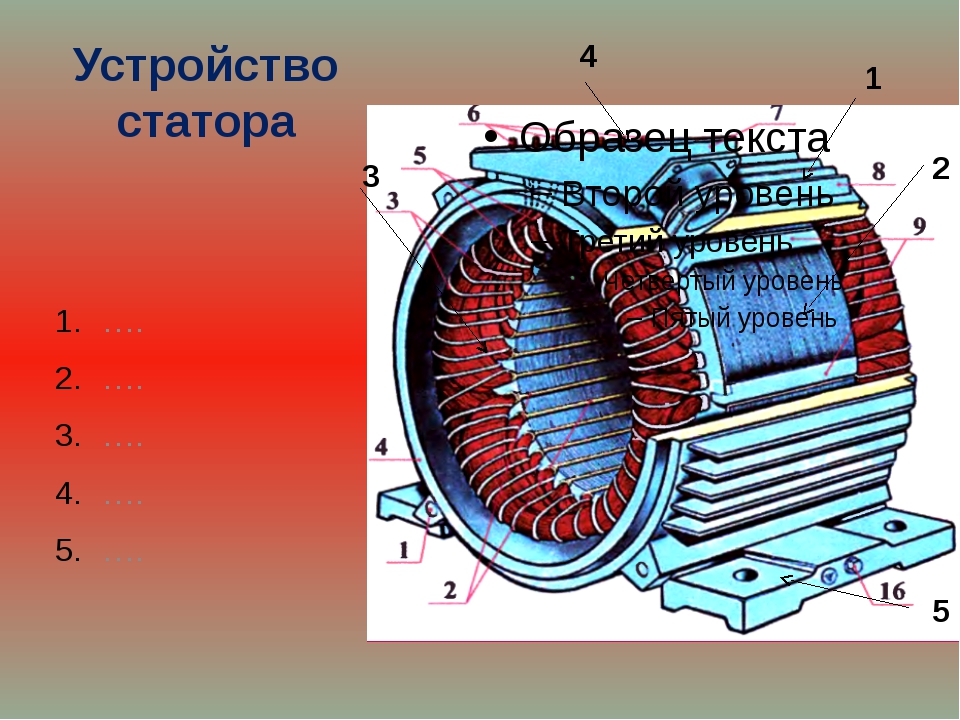 – скольжение при номинальной нагрузке – скольжение при номинальной нагрузке | |
| Скольжение двигателя s2 при введении добавочного сопротивления в ротор | ||
| КПД двигателя при введении добавочного сопротивления в ротор | ||
| Критический максимальный момент, развиваемый в двигательном (+) и генераторном (-) режимах, кГм | U1ф – фазное напряжение, В | |
| Уравнение вращающего момента при добавочном сопротивлении в цепи ротора |
Литература:
1. Справочная книга электрика. В.И. Григорьева, 2004 г.
Всего наилучшего! До новых встреч на сайте Raschet.info.
активное сопротивление двигателя, полное сопротивление двигателя, реактивное сопротивление двигателя, ток двигателяПоделиться в социальных сетях
Благодарность:
Если вы нашли ответ на свой вопрос и у вас есть желание отблагодарить автора статьи за его труд, можете воспользоваться платформой для перевода средств «WebMoney Funding» и «PayPal».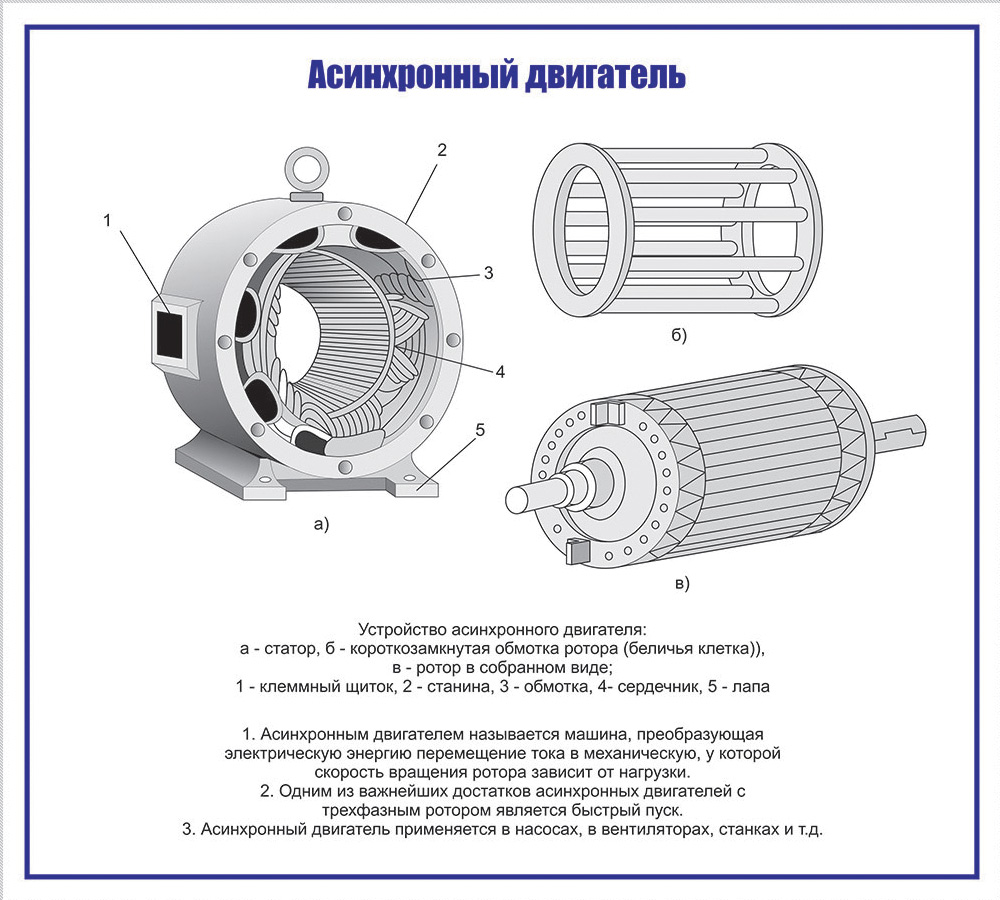
Данный проект поддерживается и развивается исключительно на средства от добровольных пожертвований.
Проявив лояльность к сайту, Вы можете перечислить любую сумму денег, тем самым вы поможете улучшить данный сайт, повысить регулярность появления новых интересных статей и оплатить регулярные расходы, такие как: оплата хостинга, доменного имени, SSL-сертификата, зарплата нашим авторам.
Какак разница между короткозамкнутым и фазным ротором
Какак разница между короткозамкнутым и фазным ротором
Ротор — вращающаяся часть двигателей и рабочих машин, на которой расположены органы, получающие энергию от рабочего тела или отдающие её рабочему телу.
Как вы знаете, асинхронные электродвигатели имеют трехфазную обмотку (три отдельные обмотки) статора, которая может формировать разное количество пар магнитных полюсов в зависимости от своей конструкции, что влияет в свою очередь на номинальные обороты двигателя при номинальной частоте питающего трехфазного напряжения.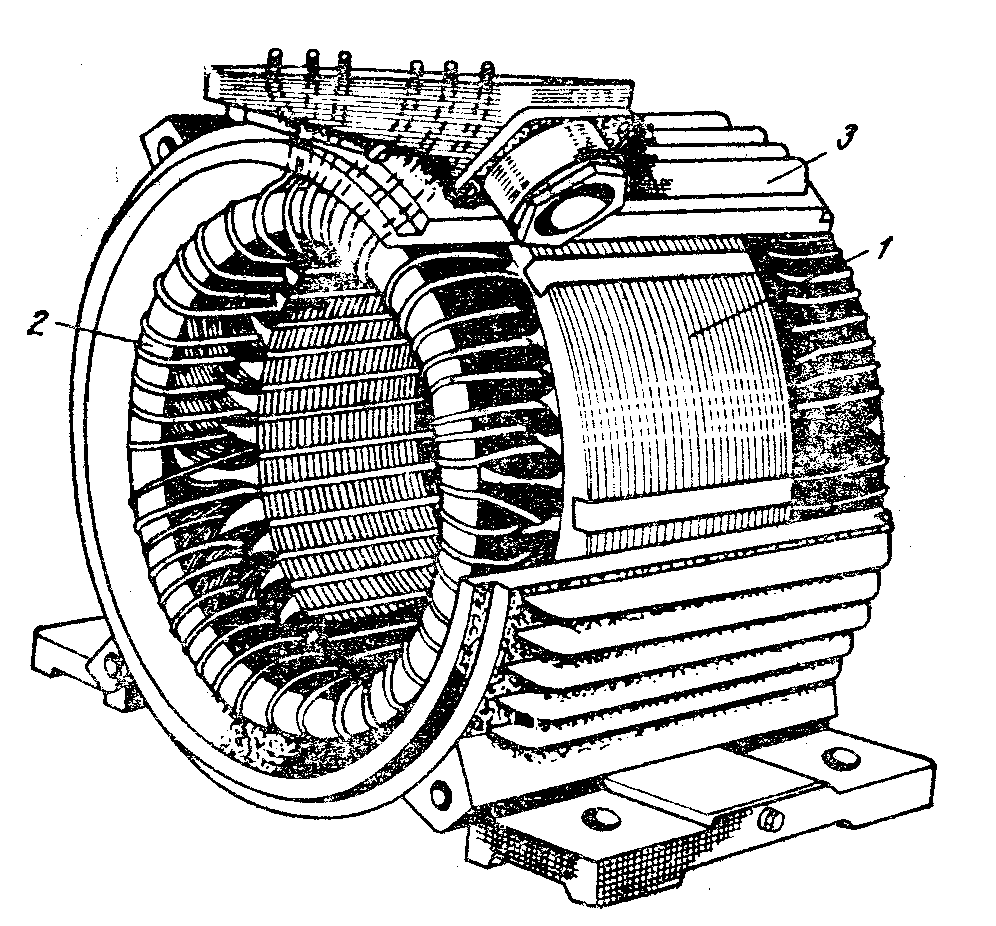
Короткозамкнутый ротор
Представления о явлении электромагнитной индукции подскажут нам, что произойдет с замкнутым витком проводника, помещенным во вращающееся магнитное поле, подобное магнитному полю статора асинхронного двигателя. Если поместить такой виток внутри статора, то когда ток на обмотку статора будет подан, в витке будет индуцироваться ЭДС, и появится ток, то есть картина примет вид: виток с током в магнитном поле. Тогда на такой виток (замкнутый контур) станет действовать пара сил Ампера, и виток начнет поворачиваться вслед за движением магнитного потока.
Так и работает асинхронный двигатель с короткозамкнутым ротором, только вместо витка на его роторе расположены медные или алюминиевые стержни, замкнутые накоротко между собой кольцами с торцов сердечника ротора.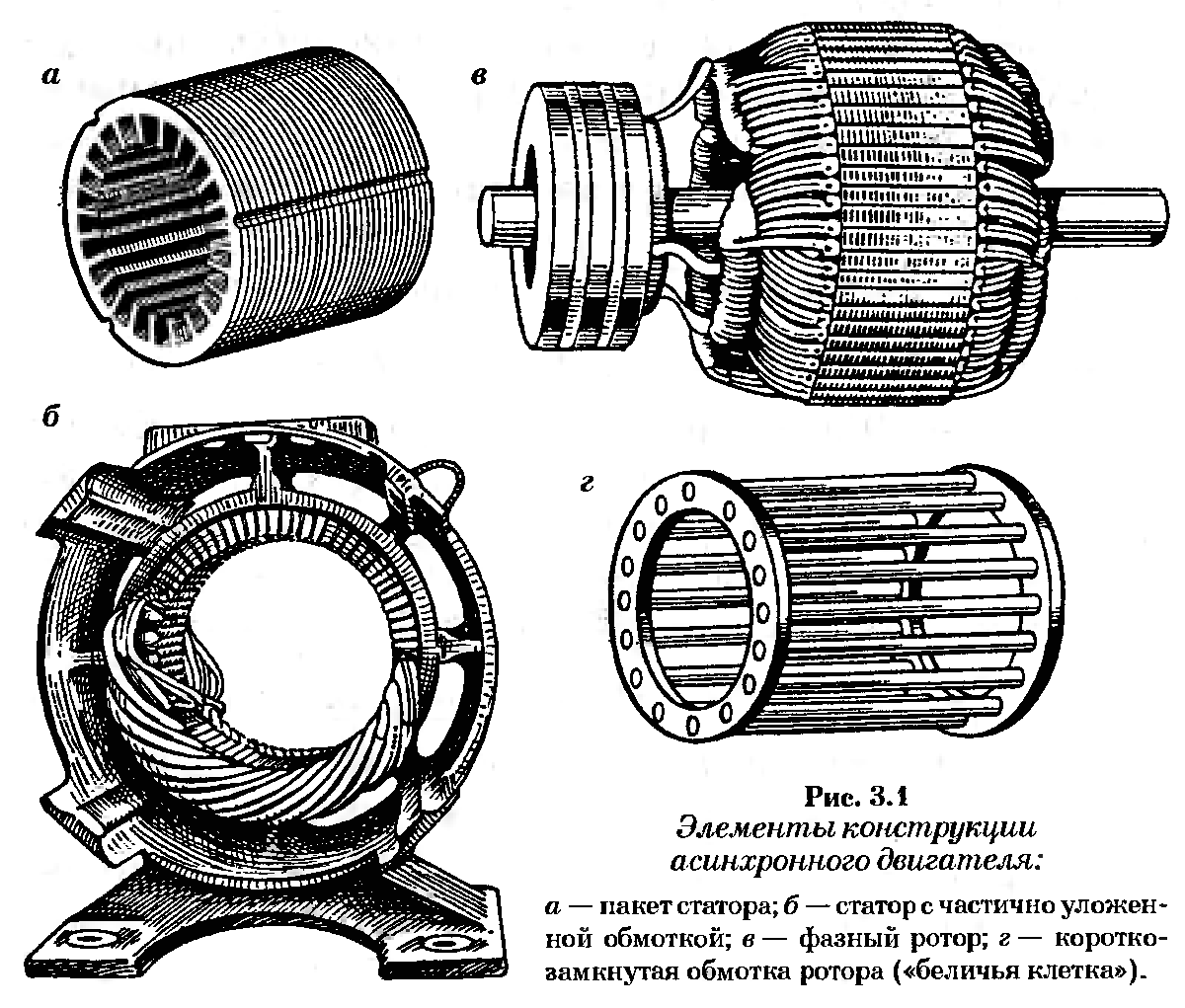 Ротор с такими короткозамкнутыми стержнями и называют короткозамкнутым или ротором типа «беличья клетка» поскольку расположенные на роторе стержни напоминают беличье колесо.
Ротор с такими короткозамкнутыми стержнями и называют короткозамкнутым или ротором типа «беличья клетка» поскольку расположенные на роторе стержни напоминают беличье колесо.
Проходящий по обмоткам статора переменный ток, порождающий вращающееся магнитное поле, наводит ток в замкнутых контурах «беличьей клетки», и весь ротор приходит во вращение, поскольку в каждый момент времени разные пары стержней ротора будут иметь различные индуцируемые токи: какие-то стержни — большие токи, какие-то — меньшие, в зависимости от положения тех или иных стержней относительно поля. И моменты никогда не будут уравновешивать ротор, поэтому он и будет вращаться, пока по обмоткам статора течет переменный ток.
К тому же стержни «беличьей клетки» немного наклонены по отношению к оси вращения — они не параллельны валу. Наклон сделан для того, чтобы момент вращения сохранялся постоянным и не пульсировал, кроме того наклон стержней позволяет снизить действие высших гармоник индуцируемых в стержнях ЭДС. Будь стержни без наклона — магнитное поле в роторе пульсировало бы.
Будь стержни без наклона — магнитное поле в роторе пульсировало бы.
Скольжение s
Для асинхронных двигателей всегда характерно скольжение s, возникающее из-за того, что синхронная частота вращающегося магнитного поля n1 статора выше реальной частоты вращения ротора n2.
Скольжение возникает потому, что индуцируемая в стержнях ЭДС может иметь место только при движении стержней относительно магнитного поля, то есть ротор всегда вынужден хоть немного, но отставать по скорости от магнитного поля статора. Величина скольжения равна s = (n1-n2)/n1.
Если бы ротор вращался с синхронной частотой магнитного поля статора, то в стержнях ротора не индуцировался бы ток, и ротор бы просто не стал вращаться. Поэтому ротор в асинхронном двигателе никогда не достигает синхронной частоты вращения магнитного поля статора, и всегда хоть чуть-чуть (даже если нагрузка на валу критически мала), но отстает по частоте вращения от частоты синхронной.
Скольжение s измеряется в процентах, и на холостом ходу практически приближается к 0, когда момент противодействия со стороны ротора почти отсутствует. При коротком замыкании (ротор застопорен) скольжение равно 1.
При коротком замыкании (ротор застопорен) скольжение равно 1.
Вообще скольжение у асинхронных двигателей с короткозамкнутым ротором зависит от нагрузки и измеряется в процентах. Номинальное скольжение — это скольжение при номинальной механической нагрузке на валу в условиях, когда напряжение питания соответствует номиналу двигателя.
Фазный ротор
Асинхронные двигатели с фазным ротором, в отличие от асинхронных двигателей с короткозамкнутым ротором, имеют на роторе полноценную трехфазную обмотку. Подобно тому, как на статоре уложена трехфазная обмотка, так же и в пазах фазного ротора уложена трехфазная обмотка.
Выводы обмотки фазного ротора присоединены к контактным кольцам, насаженным на вал, и изолированным друг от друга и от вала. Обмотка фазного ротора состоит из трех частей — каждая на свою фазу — которые чаще всего соединены по схеме «звезда».
К обмотке ротора через контактные кольца и щетки присоединяется регулировочный реостат. Краны и лифты, например, пускаются под нагрузкой, и здесь необходимо развивать существенный рабочий момент. Невзирая на усложненность конструкции, асинхронные двигатели с фазным ротором обладают лучшими регулировочными возможностями касательно рабочего момента на валу, чем асинхронные двигатели с короткозамкнутым ротором, которым требуется промышленный частотный преобразователь.
Краны и лифты, например, пускаются под нагрузкой, и здесь необходимо развивать существенный рабочий момент. Невзирая на усложненность конструкции, асинхронные двигатели с фазным ротором обладают лучшими регулировочными возможностями касательно рабочего момента на валу, чем асинхронные двигатели с короткозамкнутым ротором, которым требуется промышленный частотный преобразователь.
Обмотка статора асинхронного двигателя с фазным ротором выполняется аналогично тому, как и на статорах асинхронных двигателей с короткозамкнутым ротором, и аналогичным путем создает, в зависимости от количества катушек (три, шесть, девять или более катушек), два, четыре и т. д. полюсов. Катушки статора сдвинуты между собой на 120, 60, 40 и т. д. градусов. При этом на фазном роторе делается столько же полюсов, сколько и на статоре.
Регулируя ток в обмотках ротора, регулируют рабочий момент двигателя и величину скольжения. Когда регулировочный реостат полностью выведен, то для уменьшения износа щеток и колец их закорачивают при помощи специального приспособления для подъема щеток.
Ранее ЭлектроВести писали, что в Атлантическом океане первый в мире телескопический ветрогенератор обеспечивает электроэнергией 5000 домохозяйств на одном из Канарских островов – Гран-Канария.
По материалам: electrik.info.
Намагничивающие силы и токи асинхронного электродвигателя
Намагничивающие силы и токи асинхронного электродвигателя
Основной магнитный поток Ф в асинхронном двигателе создается совместным действием намагничивающих сил обмоток статора F1 и ротора F2
Ф = (F1+F2) / Rм = F0 / Rм,
где Rм – магнитное сопротивление магнитной системы двигателя потоку Ф;
F0 = F1 + F2 – результирующая намагничивающая сила (н.с.) асинхронного двигателя, численно равная н.с. обмотки статора в режиме холостого хода.
Величина этой н.с. определяется выражением
F0 = 0,45 m1 (I0? 1 / p ) K1,
где I0 – ток холостого тока, т.е. ток в обмотке статора в режиме холостого хода.
Намагничивающие силы обмоток статора и ротора в режиме нагруженного двигателя
F1 = 0,45 m1 (I1? 1 / p ) K1,
F2 = 0,45 m2 (I2? 2 / p ) K2,
где m1 – число фаз в обмотке ротора;
K2 – обмоточный коэффициент обмотки ротора.
При изменениях нагрузки на валу двигателя меняются токи I1 и I2 в обмотках, что вызывает соответствующие изменения намагничивающих сил обмоток статора и ротора. Но основной магнитный поток Ф при этом сохраняется неизменным. Дело в том, что напряжение, подведенное к обмотке статора, неизменно (U1 = const) и почти полностью уравновешивается электродвижущей силой (э.д.с.) Е1 обмотки статора
?1 ? – ?1.
Но, поскольку э.д.с. Е1 пропорциональна основному потоку Ф, то последний при изменениях нагрузки остается неизменным. Этим и объясняется то, что, несмотря на изменения н. с. F1 и F2, результирующая н. с. F0 остается неизменной,
F0 = F1+F2 = const.
Подставив вместо F0, F1 и F2 их значения (см. формулы выше), получим
0,45 m1 (I0? 1/p) K1 = 0,45 m1 (I1? 1/p) K1+ 0,45 m2 (I2? 2/p) K2.
Разделив это равенство на m1(?1/p) K1, получим уравнение токов асинхронного двигателя
I0 = I1 [(m2? 2K2)/(m1? 1K1)] I2 = I1 I’2).
Величина I’2 = [(m2?2K2)/(m1?1K1)] I2 представляет собой ток ротора, приведенный к обмотке статора.
Преобразовав уравнение токов, получим выражение тока статора
I1 = I0 (-I’2),
из которого следует, что ток статора асинхронного двигателя имеет две составляющие: намагничивающую и составляющую, которая компенсирует размагничивающее действие тока статора.
Следовательно, ток ротора I’2 оказывает на магнитную силу двигателя такое же размагничивающее влияние, как и ток вторичной обмотки трансформатора. Этим объясняется то, что любое изменение нагрузки на валу двигателя сопровождается соответствующим изменением тока в обмотке статора I1. Дело в том, что изменение нагрузки на валу двигателя вызывает изменение скольжения s. Это, в свою очередь, влияет на э.д.с. обмотки ротора, следовательно, и на величину тока ротора I2. Но так как ток I2 оказывает размагничивающие влияние на магнитную цепь двигателя, то его изменения вызывают соответствующие изменения тока в цепи статора I1 за счет составляющей –I’2.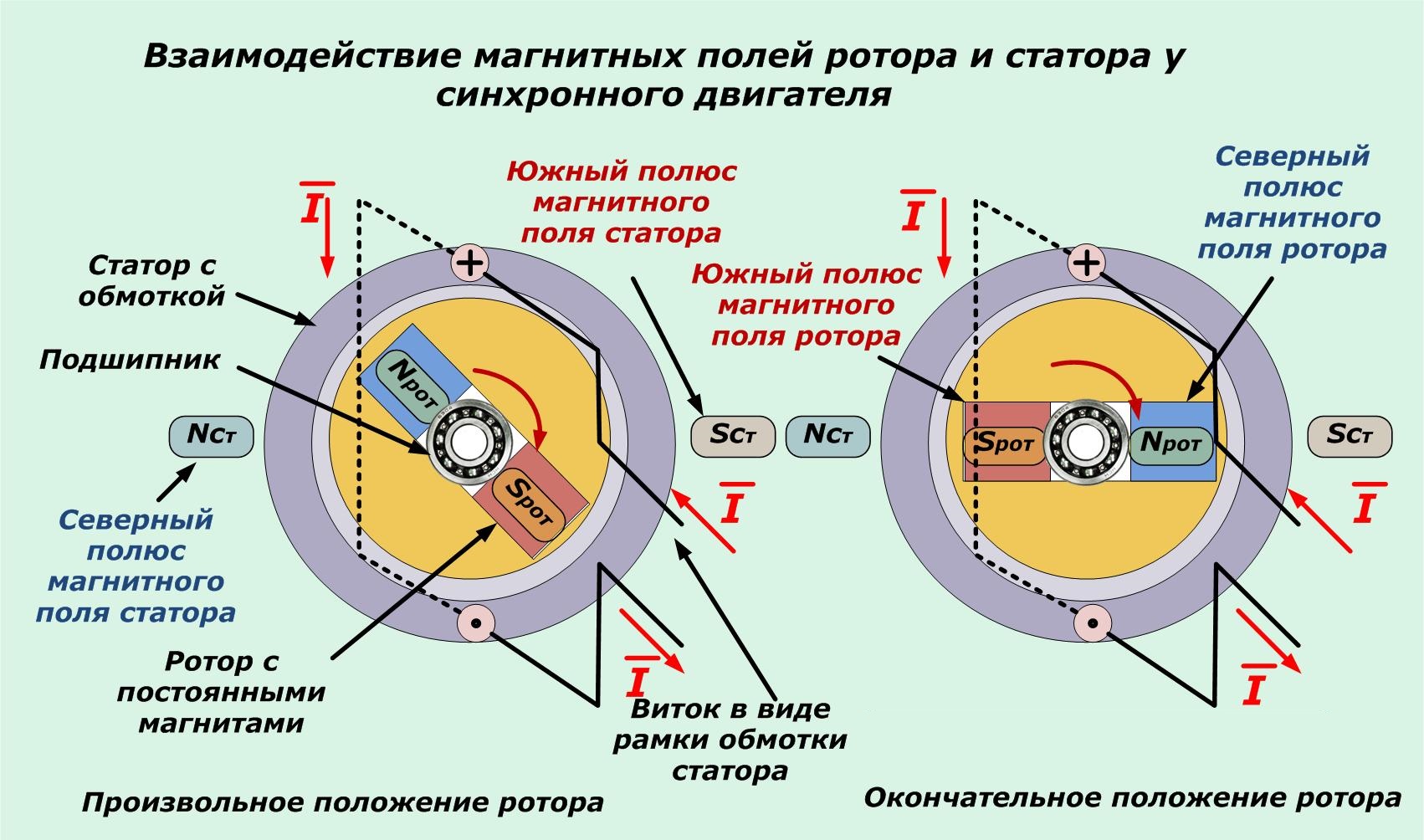 Так, например, в режиме холостого хода, когда нагрузка на валу двигателя отсутствует и s ? 0, ток I’2 ? 0.
Так, например, в режиме холостого хода, когда нагрузка на валу двигателя отсутствует и s ? 0, ток I’2 ? 0.
В этом случае ток в обмотке статора I1 ? I0. Если же ротор затормозить, не отключая обмотки статора от сети (режим короткого замыкания), то скольжение s = 1 и э.д.с. обмотки ротора Е2s достигает своего наибольшего значения Е2. Также наибольшего значения достигает ток I’2, а следовательно, и ток в обмотке статора I1.
Асинхронные электродвигатели
Трехфазный асинхронный двигатель с короткозамкнутым ротором
Статор асинхронного двигателя (рис. 187) состоит из сердечника 2, обмотки 3 и корпуса (станины) 1. Сердечник статора является частью магнитопровода и собран из отдельных стальных пластин 4 толщиной 0,35-0,5 мм. Чтобы снизить до минимума потери энергии на вихревые токи, пластины изолируют друг от друга (чаще всего тонким слоем специального лака). В пазах стального статора укладывают провода, образующие трехфазную обмотку статора. Каждая фазная обмотка состоит из одной или нескольких катушек и рассчитана на определенное номинальное фазное напряжение. На двигателе указывается два номинальных напряжения (например, 380 и 220 В), отличающихся в j/З раз.
На двигателе указывается два номинальных напряжения (например, 380 и 220 В), отличающихся в j/З раз.
При большем напряжении сети фазные обмотки статора соединяют звездой, а при меньшем напряжении – треугольником. В том и другом случае к каждой фазной обмотке подводится одинаковое напряжение, являющееся номинальным фазным напряжением двигателя. Начала обмоток статора обозначают CI, С2, СЗ, а концы – С4, С5, С6.
Расположение выводов обмоток на щитке (рис. 188) удобно для соединения обмоток звездой или треугольником. Сердечник статора с обмоткой расположен (обычно запрессован) внутри корпуса, кото-
Рис. 187. Статор асинхронного двигателя
рый отливают из чугуна или алюминиевого сплава. С боков сердечник статора закрывается крышками, в которых имеются подшипники.
Ротор двигателя представляет собой цилиндр, набранный из листовой электротехнической стали. Обмотка ротора состоит из нескольких медных стержней, соединенных на концах медными кольцами, и называется «беличьим колесом» (рис.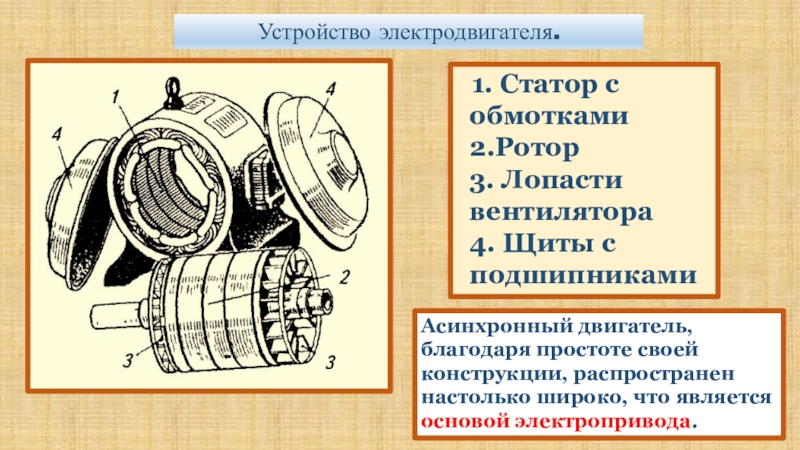 189, а). В новых асинхронных электродвигателях короткозамкнутая обмотка образуется путем заливки пазов ротора алюминием (рис. 189, б).
189, а). В новых асинхронных электродвигателях короткозамкнутая обмотка образуется путем заливки пазов ротора алюминием (рис. 189, б).
При прохождении по обмоткам статора трехфазного переменного тока создается магнитное поле, вращающееся с частотой пх = 6011/Д где 1 – частота подводимого к двигателю тока; р – число пар полюсов, которое зависит от числа катушек.
Если имеются три катушки, то вращающийся магнитный поток имеет два полюса (/7=1) и пх – – 3000 об/мин. Если число катушек увеличить в 2 раза, то р = 2, а пх = = 1500 об/мин.
Магнитные линии поля статора пересекают обмотку ротора и в ней возникает ток, создающий свое магнитное поле. В результате взаимодействия магнитных полей ротор начинает вращаться в направлении магнитного поля статора с частотой п.
Ротор и поле статора вращаются с различными частотами. В противном случае не было бы пересечения ротора силовыми линиями магнитного поля статора. Отношение разности частот вращающегося поля статора пх и ротора п к частоте магнитного поля статора называют скольжением (отставанием): 5 = (п, – п)/пх, или 5 = (п, – п)!пхX Х100%.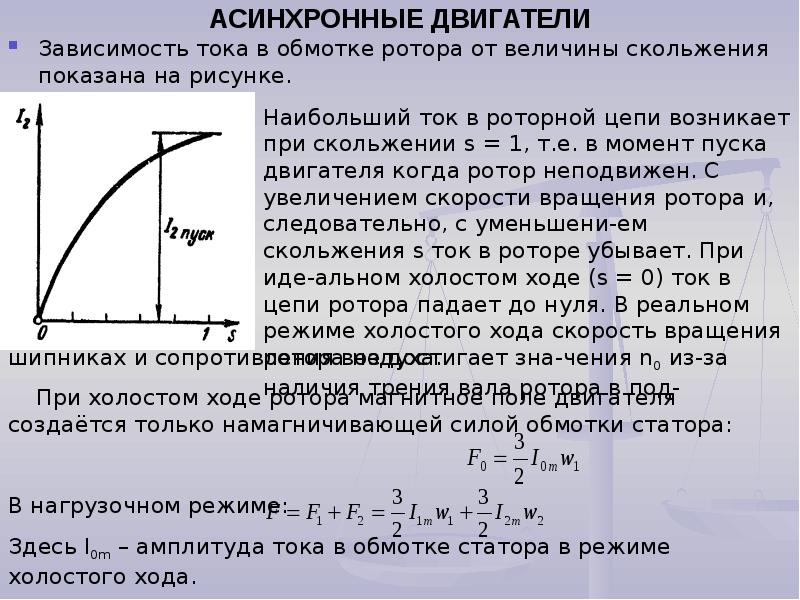 При пуске двигателя п = 0, а 5 = 1, или 100%.
При пуске двигателя п = 0, а 5 = 1, или 100%.
Во время холостого хода двигатель имеет минимальное скольжение (1-2%). С увеличением нагрузки уменьшается частота вращения ротора и увеличивается скольжение при номинальной нагрузке, достигая 5-6%.
Электромагнитная связь обмоток ротора и статора аналогична электромагнитной связи обмоток трансформатора. Поэтому с увеличением скольжения, когда линии магнитного поля статора чаще пересекают ротор, увеличивается ток в обмотках ротора и статора.
Частота тока в обмотке ротора зависит от скольжения: /2 = /х5. При пуске 5=1 и /2 = /х = 50 Гц. С возрастанием частоты враще-
Рис. 188. Расположение выводов обмоток на щитке (а) и соединение обмоток звездой (б) и треугольником (е)
Рис. 189. Короткозамкнутая обмотка ротора (а) и короткозамкнутая обмотка ротора, выполненная в виде алюминиевой отливки (б):
/- короткозамыкающие кольца; 2 – листы магнитопривода; 3 – вентиляционные лопатки; 4 – стержни ния ротора п уменьшается скольжение S и частота /2. При холостом ходе двигателя /2 = ІЧ-4 Гц.
При холостом ходе двигателя /2 = ІЧ-4 Гц.
Благодаря простоте устройства, дешевизне и большой надежности в работе короткозамкнутые асинхронные двигатели получили широкое распространение. К недостаткам короткозамкнутых асинхронных двигателей относятся: значительное потребление тока в момент пуска; слабый пусковой вращающий момент; потребление реактивного тока из-за индуктивности обмоток статора, вызывающее снижение cos ф.
При пуске двигателя магнитное поле статора с максимальной частотой пересекает неподвижный ротор и в нем наводится наибольшая э. д. с. В результате этого ток в обмотках ротора и статора больше номинального в 5-8 раз. Пусковые токи не успевают нагреть машину до высокой температуры, но вызывают снижение напряжения в сети, что отрицательно влияет на работу других потребителей, включенных в эту же сеть.
Вращающий момент М асинхронного двигателя образуется в результате взаимодействия магнитного потока Ф статора с активной составляющей тока ротора /а2 = /2cos ф2.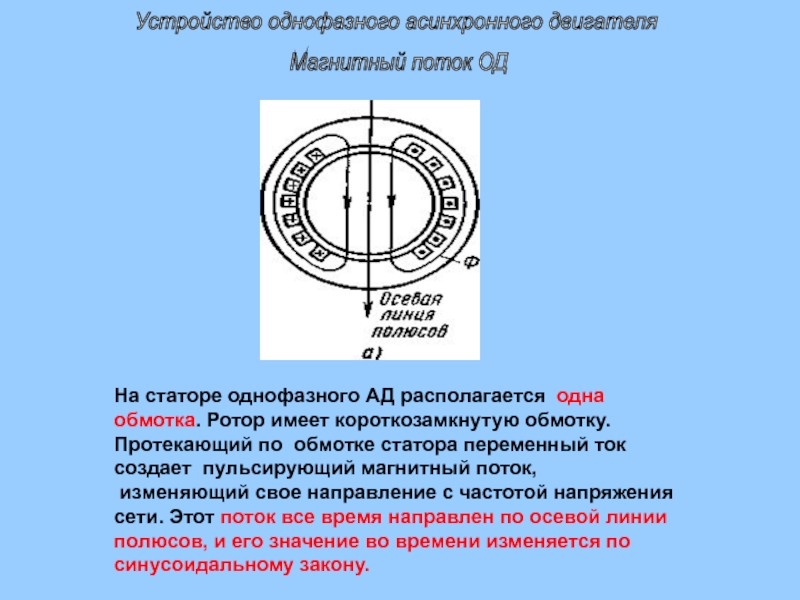 Следовательно, М = = C®/2cos ф2, где С – коэффициент, зависящий от конструкции двигателя; ф2 – разность фаз э. д. с. ?2 и тока /2 ротора.
Следовательно, М = = C®/2cos ф2, где С – коэффициент, зависящий от конструкции двигателя; ф2 – разность фаз э. д. с. ?2 и тока /2 ротора.
При пуске в короткозамкнутом роторе асинхронного двигателя возникает ток наибольшей частоты /2. Поэтому индуктивное сопротивление ротора XL2 = 2лf2L2 значительно больше активного г2. Активная составляющая тока ротора /2cos ф2 = /2г2/]/г\ х?2 и вращающий момент не достигают максимального значения. С увеличением скорости частота /2 тока в роторе и его индуктивное сопротивление начнут уменьшаться, что в свою очередь вызовет увеличение активной составляющей тока ротора и вращающего момента двигателя. Вращающий момент асинхронного двигателя достигает наи большего значения при равенстве активного и индуктивного сопротивлений ротора, т. е. при г2 = ХЬ2.
При дальнейшем увеличении частоты вращения это равенство нарушается, т.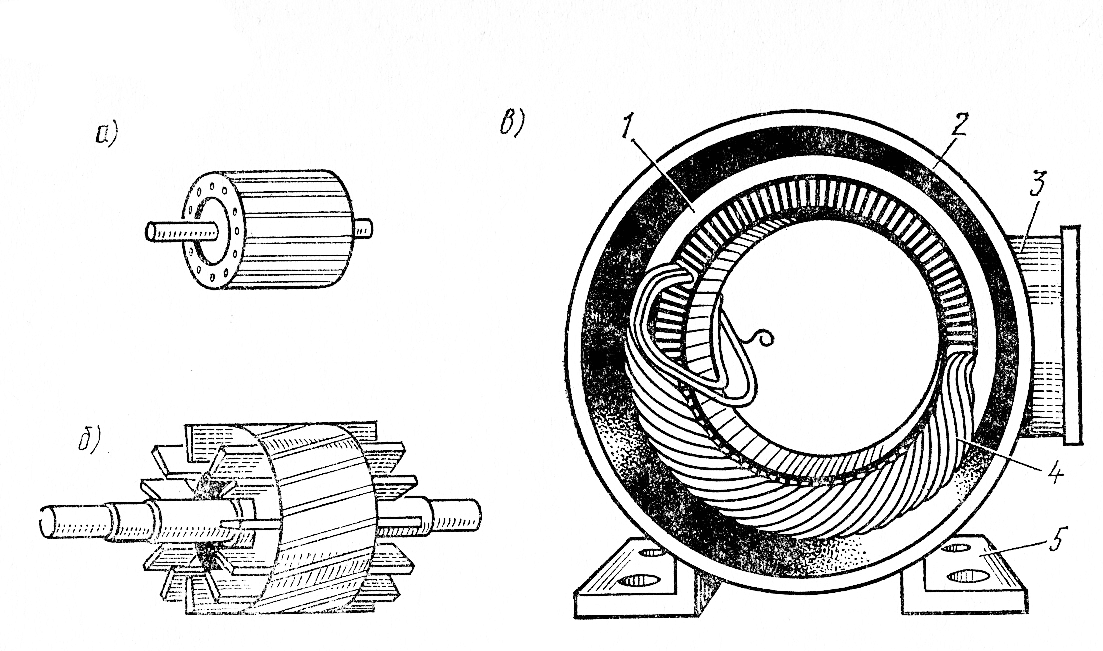 е.
е.
< г2 и вращающий момент вновь начнет уменьшаться.
При скольжении 5 = 1 (рис. 190) двигатель развивает пусковой момент /Ип, при номинальном скольжении 5Н = 0,02+-0,06- номинальный момент Мн. Максимальный момент /ИтаХ двигатель развивает при скольжении, называемом критическим (5кр я» 0,2).
Трехфазные асинхронные электродвигатели с короткозамкнутым ротором типа МСТ применяют в стрелочных электроприводах. Основные характеристики этих электродвигателей приведены в табл. 11.
Электродвигатели типов МСТ-0,25 и МСТ-0,3 устанавливают в электроприводах тяжелых и обычных стрелок электрической централизации, типа МСТ-0,6 – в электроприводах стрелок маневровых районов.
Для увеличения начального вращающего момента, необходимого для перевода стрелок, короткозамкнутую обмотку ротора стрелочных электродвигателей выполняют с повышенным активным сопротивлением. Изменение направления вращения ротора электродвигателя осуществляется переменой мест двух линейных проводов, подводящих ток к электродвигателю.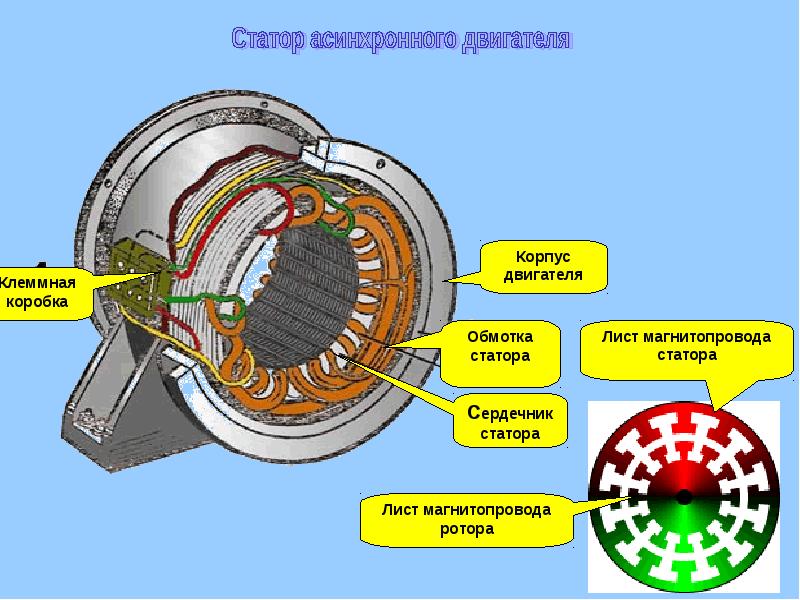 При этом изменяется направление вращения магнитного поля статора, а следовательно, и ротора. Асинхронные электродвигатели малой мощности включают в сеть перемен
При этом изменяется направление вращения магнитного поля статора, а следовательно, и ротора. Асинхронные электродвигатели малой мощности включают в сеть перемен
Г!лс. 190. Зависимость вращающего момента асинхронного двигателя от скольжения
Таблица 11
Тип электро- | МОЩНОСТЬ, | Напряжение питання, В, при соединении обмоток | Потребляе- | Частота вращения ротора, об/мин | |
двигателя | Вт | звездой | треугольни ком | мый ток, А | |
МСТ-0,25 | 250 | 220 | 127 | 1,4/2,4* | 1250±50 |
МСТ-0,3 | 300 | 190+5,? – 9,5 | но±53?5 | 2,1/3,6 | 850+42,5 |
МСТ-0. | 300 | 330±|?,6 | 190±и. | 1,2/2,1 | 850+42,5 |
МСТ-0,6 | 600 | 190±в”6 | Н0±1;\ | 2,8/4,85 | 2850+285 |
МСТ-0.6А | 600 | ззо±ї“,5 | юо±и. | 2/3,46 | 2850+285 |
 3А
3А* В числителе указывается потребляемый ток при соединении обмоток звездой, в зна-менатсле – при соединении обмоток треугольником.
ного тока без пусковых приспособлений. При значительных мощностях (более 5 кВт) пусковой ток ограничивают.
Существуют два способа пуска в ход короткозамкнутых асинхронных электродвигателей. Непосредственный (прямой) пуск применяют в случае, если мощность двигателя значительно меньше мощности сети. Пуск переключением обмоток со звезды на треугольник можно использовать в том случае, если обмотки статора двигателя постоянно должны быть соединены треугольником. Для того чтобы снизить пусковой ток, на период пуска обмотки статора соединяют звездой (рис. 191, а). Благодаря этому напряжение на каждой обмотке снизится в ]1 3 раз, а линейный ток уменьшится в 3 раза. Когда двигатель разовьет скорость, переключают рубильник Р2 и обмотки соединяют треугольником.
Для того чтобы снизить пусковой ток, на период пуска обмотки статора соединяют звездой (рис. 191, а). Благодаря этому напряжение на каждой обмотке снизится в ]1 3 раз, а линейный ток уменьшится в 3 раза. Когда двигатель разовьет скорость, переключают рубильник Р2 и обмотки соединяют треугольником.
Для снижения пускового тока последовательно с обмоткой статора можно включать элементы с активным или индуктивным сопротивлением (рис. 191, б и в). После пуска эти элементы шунтируются.
Однофазный асинхронный двигатель. Обмотка статора однофазного асинхронного двигателя состоит из одной катушки. Ток, проходящий по этой катушке, создает пульсирующий магнитный поток, который можно разложить на два вращающихся магнитных потока Фх и Ф2, имеющих одинаковую величину, но разное направление вращения.
Первый магнитный поток вращается (относительно неподвижного ротора) с частотой пх по движению часовой стрелки, а второй – с такой же частотой – в противоположном направлении.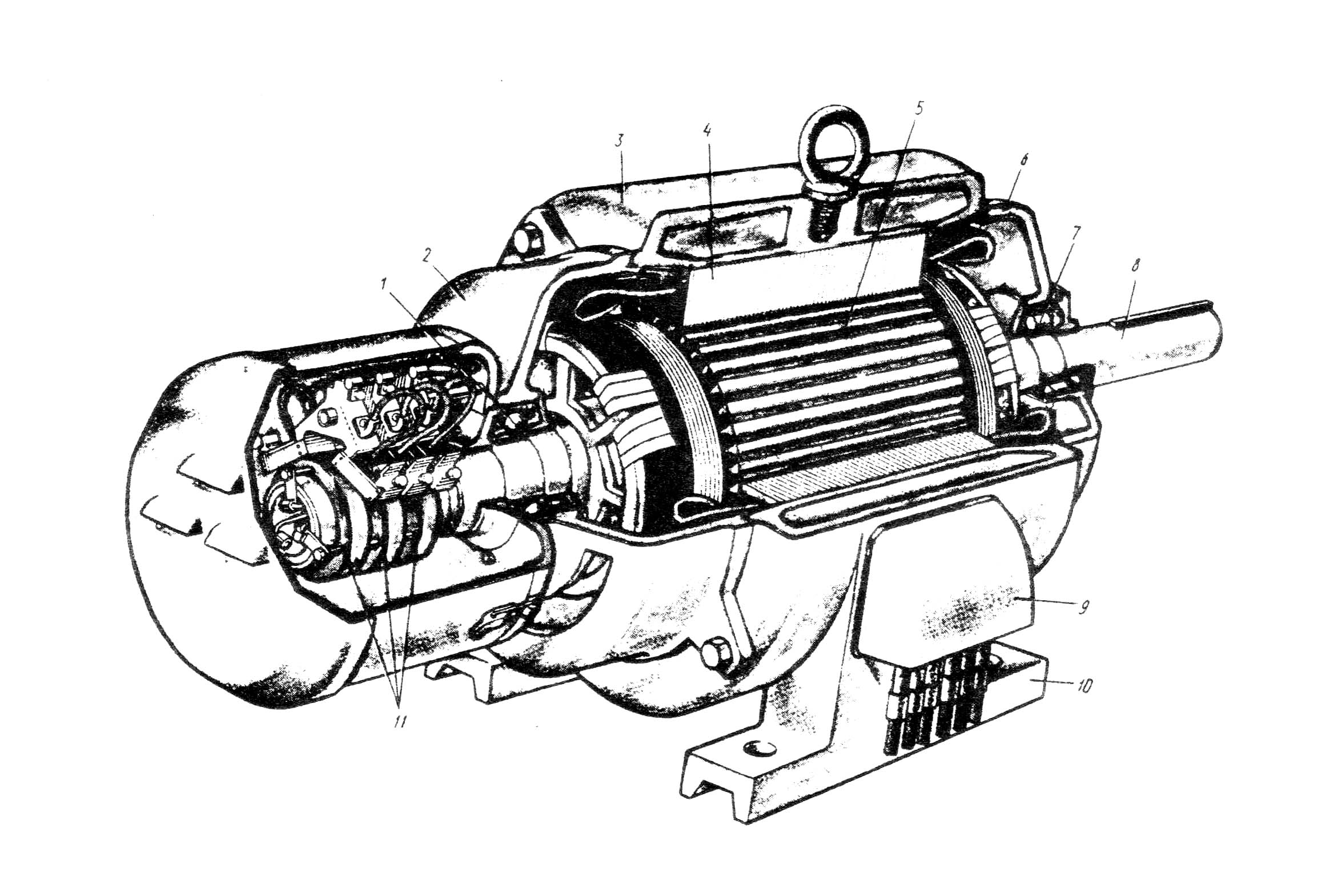 При пуске моменты Мх и М2, создаваемые каждым вращающимся потоком, равны, но направлены в противоположные стороны. В результате пусковой вращающий момент М – Мх – М2 = 0. Если ротору сообщить первоначальное движение, например по движению часовой стрелки, то вращающийся в этом же направлении магнитный поток Фх будет
При пуске моменты Мх и М2, создаваемые каждым вращающимся потоком, равны, но направлены в противоположные стороны. В результате пусковой вращающий момент М – Мх – М2 = 0. Если ротору сообщить первоначальное движение, например по движению часовой стрелки, то вращающийся в этом же направлении магнитный поток Фх будет
Рис. 191. Схемы пуска асинхронного двигателя:
а переключением обмоток статора со звезды на треугольник; б, в – с коротко-замкнутым роторам с помощью соответственно активных и индуктивных элементов действовать на ротор, как и в трехфазном короткозамкнутом двигателе. Магнитный поток Ф2, вращающийся относительно ротора в противоположном направленні!, будет индуцировать в роторе токи большей частоты. Индуктивное сопротивление ротора для этой частоты возрастет и еще больше будет отличаться от активного сопротивления. В результате этого вращающий момент Л42 уменьшится. Результирующий вращающий момент М = М, – М2 будет направлен в сторону первоначального движения ротора.
Результирующий вращающий момент М = М, – М2 будет направлен в сторону первоначального движения ротора.
Пусковой вращающий момент в однофазном асинхронном двигателе (рис. 192) может быть получен за счет дополнительной пусковой обмотки ПО, которую укладывают в пазах статора под углом 90° к главной обмотке ГО. Ток !х главной обмотки отстает по фазе от напряжения и на угол чд. Последовательно с пусковой обмоткой включен конденсатор С, и ток /2 опережает по фазе напряжение на угол <р2. Поэтому токи в обмотках сдвинуты на угол ф1 – <р2 = 90е и в машине возникает вращающееся магнитное поле, которое создает пусковой момент. Однофазные асинхронные конденсаторные двигатели типа АСОМ-48 устанавливают в кодовых путевых трансмиттерах, которые применяют в устройствах кодовой автоблокировки и автоматической локомотивной сигнализации. Электродвигатель может питаться от источника с переменным напряжением 110 В частотой 50 и 75 Гц. При частоте 50 Гц в электрическую схему двигателя включают конденсатор емкостью 6 мкФ (рис. 193, а), при частоте 75 Гц – конденсатор емкостью 2 мкФ (рис. 193, б). Основные характеристики электродвигателя типа АСОМ-48: полная мощность 16,5 В – А; полезная мощность 3,5 Вт; к. п. д. 0,3; частота вращения якоря при частоте 50 Гц 982 об/мин, при частоте 75 Гц – 1473 об/мин.
При частоте 50 Гц в электрическую схему двигателя включают конденсатор емкостью 6 мкФ (рис. 193, а), при частоте 75 Гц – конденсатор емкостью 2 мкФ (рис. 193, б). Основные характеристики электродвигателя типа АСОМ-48: полная мощность 16,5 В – А; полезная мощность 3,5 Вт; к. п. д. 0,3; частота вращения якоря при частоте 50 Гц 982 об/мин, при частоте 75 Гц – 1473 об/мин.
В однофазную сеть можно включать трехфазные асинхронные двигатели (рис. 194).
Рабочие характеристики асинхронного двигателя. На щитке асинхронного двигателя указывают номинальные значения мощности Рн, напряжения {/„, частоты вращения пп и к. п. д. т]н. На рис. 195 показаны рабочие характеристики двигателя, которые показывают при
неизменном номинальном напряжении зависимость частоты вращения п, вращающего момента М, коэффициента мощности cos ф, потребляемого тока 1 и к. п. д. г] от полезной мощности двигателя Р.г. С увеличением нагрузки частота вращения асинхронного двигателя уменьшается незначительно, поэтому характеристика п 1 (Р-. -0,9.
-0,9.
⇐Путевые дроссель-трансформаторы | Электропитающие устройства и линейные сооружения автоматики, телемеханики и связи железнодорожного транспорта | Синхронные генераторы⇒
Рабочие характеристики асинхронного двигателя | мтомд.инфо
Рабочие характеристики асинхронного двигателя представляют собой графически выраженные зависимости частоты вращения n2, КПД асинхронного двигателя η, полезного момента (момента на валу) М2, коэффициента мощности cos φ, и тока статора I1 от полезной мощности Р2 при U1 = const f1 = const.
Расчет рабочих характеристик асинхронного двигателя
Скоростная характеристика n2 = f(P2). Частота вращения ротора асинхронного двигателя n2 = n1(1 — s).
Скольжение s = Pэ2/Pэм, то есть скольжение асинхронного двигателя, а следовательно, и его частота вращения определяются отношением электрических потерь в роторе к электромагнитной мощности. Пренебрегая электрическими потерями в роторе в режиме холостого хода, можно принять Рэ2 = 0, а поэтому s ≈ 0 и n2 ≈ n1.
По мере увеличения нагрузки на валу асинхронного двигателя отношение s = Pэ2/Pэм растет, достигая значений 0,01 — 0,08 при номинальной нагрузке. В соответствии с этим зависимость n2 = f(P2) представляет собой кривую, слабо наклоненную к оси абсцисс. Однако при увеличении активного сопротивления ротора двигателя r2′ угол наклона этой кривой увеличивается. В этом случае изменения частоты асинхронного двигателя n2 при колебаниях нагрузки Р2 возрастают. Объясняется это тем, что с увеличением r2′ возрастают электрические потери в роторе.
Рабочие характеристики асинхронного двигателя
Зависимость М2 = f(P2). Зависимость полезного момента на валу асинхронного двигателя М2 от полезной мощности Р2 определяется выражением M2 = Р2/ω2 = 60 P2/(2πn2) = 9,55Р2/n2, где Р2 — полезная мощность, Вт; ω2 = 2πf2/60 — угловая частота вращения ротора.
Из этого выражения следует, что если n2 = const, то график М2 = f2(Р2) представляет собой прямую линию. Но в асинхронном двигателе с увеличением нагрузки Р2 частота вращения ротора уменьшается, а поэтому полезный момент на валу М2 с увеличением нагрузки возрастает не сколько быстрее нагрузки, а следовательно, график М2 = f (P2) имеет криволинейный вид.
Зависимость cos φ1 = f (P2). В связи с тем что ток статора асинхронного двигателя I1 имеет реактивную (индуктивную) составляющую, необходимую для создания магнитного поля в статоре, коэффициент мощности асинхронных двигателей меньше единицы. Наименьшее значение коэффициента мощности соответствует режиму холостого хода. Объясняется это тем, что ток холостого хода электродвигателя I0 при любой нагрузке остается практически неизменным. Поэтому при малых нагрузках двигателя ток статора невелик и в значительной части является реактивным (I1 ≈ I0). В результате сдвиг по фазе тока статора относительно напряжения получается значительным (φ1 ≈ φ0), лишь немногим меньше 90°.
В результате сдвиг по фазе тока статора относительно напряжения получается значительным (φ1 ≈ φ0), лишь немногим меньше 90°.
Коэффициент мощности асинхронных двигателей в режиме холостого хода обычно не превышает 0,2. При увеличении нагрузки на валу двигателя растет активная составляющая тока I1 и коэффициент мощности возрастает, достигая наибольшего значения (0,80 — 0,90) при нагрузке, близкой к номинальной. Дальнейшее увеличение нагрузки на валу двигателя сопровождается уменьшением cos φ1 что объясняется возрастанием индуктивного сопротивления ротора (x2s) за счет увеличения скольжения, а следовательно, и частоты тока в роторе.
В целях повышения коэффициента мощности асинхронных двигателей чрезвычайно важно, чтобы двигатель работал всегда или по крайней мере значительную часть времени с нагрузкой, близкой к номинальной. Это можно обеспечить лишь при правильном выборе мощности двигателя. Если же двигатель работает значительную часть времени недогруженным, то для повышения cos φ1, целесообразно подводимое к двигателю напряжение U1 уменьшить.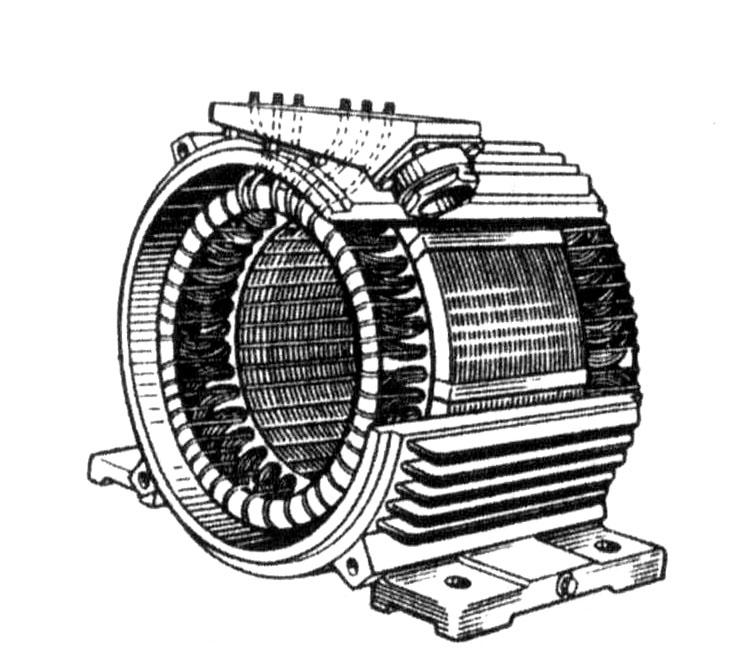 Например, в двигателях, работающих при соединении обмотки статора треугольником, это можно сделать пересоединив обмотки статора в звезду, что вызовет уменьшение фазного напряжения в раз. При этом магнитный поток статора, а следовательно, и намагничивающий ток уменьшаются примерно в раз. Кроме того, активная составляющая тока статора несколько увеличивается. Все это способствует повышению коэффициента мощности двигателя.
Например, в двигателях, работающих при соединении обмотки статора треугольником, это можно сделать пересоединив обмотки статора в звезду, что вызовет уменьшение фазного напряжения в раз. При этом магнитный поток статора, а следовательно, и намагничивающий ток уменьшаются примерно в раз. Кроме того, активная составляющая тока статора несколько увеличивается. Все это способствует повышению коэффициента мощности двигателя.
Принцип работы асинхронного электродвигателя | Русэлт
Асинхронные электродвигатели – это устройства, главным назначением которых является преобразование энергии переменного электротока в механическую. Своим названием двигатель обязан асинхронному типу вращения ротора относительно частоты вращения магнитного поля, индуцирующего электроток в обмотке статора.
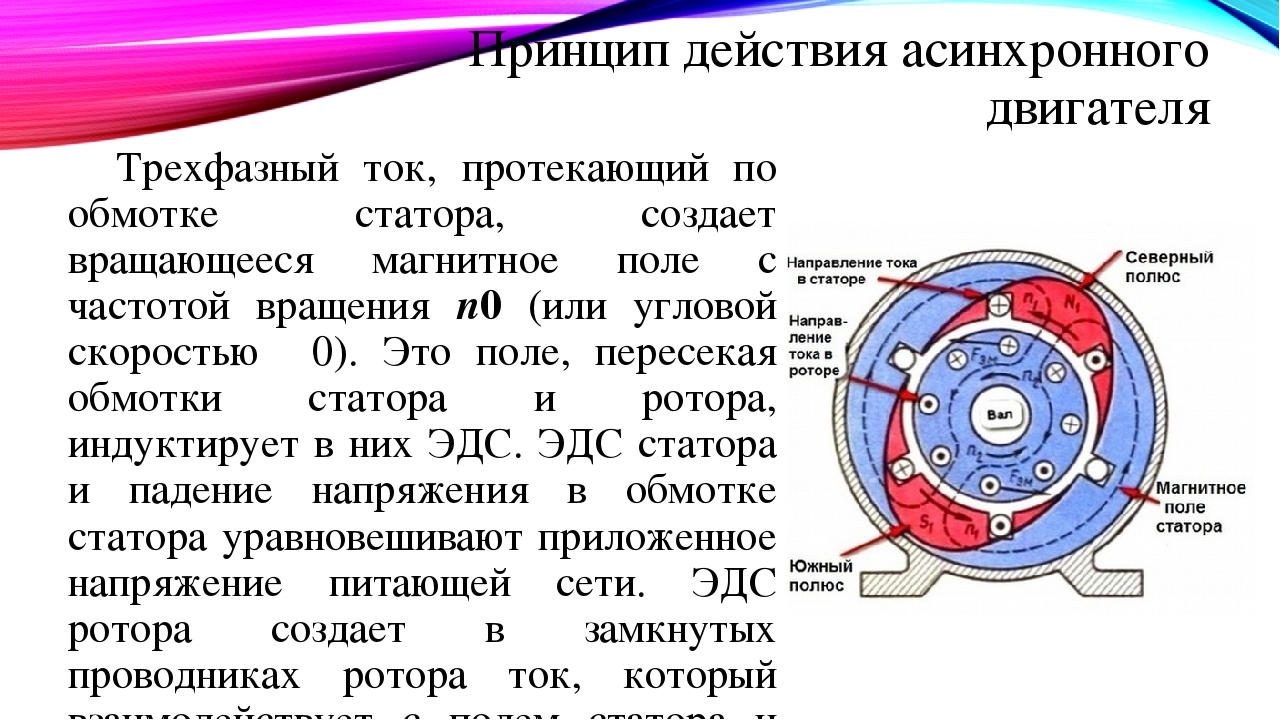
Принцип работы на примере асинхронного электродвигателя трехфазного тока
Этот тип электрического двигателя наиболее часто применяется в различных сферах промышленности. Двигатель имеет 3-и обмотки на статоре, со смещением на 120 градусов. Обмотки запитаны переменным током и объединены по схеме «звезда» или «треугольник». При подаче напряжения на обмотку статора во всех трёх фазах появится магнитный поток.
Двигатель имеет 3-и обмотки на статоре, со смещением на 120 градусов. Обмотки запитаны переменным током и объединены по схеме «звезда» или «треугольник». При подаче напряжения на обмотку статора во всех трёх фазах появится магнитный поток.
Вместе с изменением частоты напряжения на обмотке статора, изменяется и магнитный поток. Фазы и магнитные потоки смещены относительно друг друга на сто двадцать градусов. Суммарный магнитный поток и будет вращающимся магнитным потоком, создающим электродвижущую силу (ЭДС). ЭДС, в замкнутой электроцепи обмотки ротора, индуцирует электроток. Во взаимодействии с магнитным потоком статора, ток создает пусковой момент электрического двигателя. Ротор начинает вращение в таком же направлении, что и магнитное поле статора при превышении пусковым моментом двигателя его тормозного момента.
Преимущества и недостатки асинхронных электродвигателей
Простота эксплуатации и хорошая ремонтопригодность – главные достоинства асинхронного двигателя, сделавшие его наиболее востребованным в очень разных сферах машиностроения и приборостроения. Привлекает и:
Привлекает и:
- Сравнительно невысокая цена;
- Надёжность
- Несложность подсоединения в общую электроцепь устройств.
Асинхронные электродвигатели имеют и ряд недостатков:
- Трудности с точным регулированием скорости;
- Большой пусковой ток;
- Относительно невысокий коэффициент мощности.
По типу обмотки ротора, короткозамкнутой или фазной, асинхронные двигатели, подразделяются на 2 типа:
- Электродвигатели с короткозамкнутым ротором имеют обмотку, замыкающуюся на сам ротор;
- Электродвигатели с фазным ротором – обмотку с концами, выведенными на щеточно-коллекторный узел.
Преимущество двигателя с фазным ротором в том, что скорость вращения можно регулировать путем подключения дополнительных сопротивлений (реостатного регулирования).
Расчет ЭДС и токов асинхронных двигателей
ПРАКТИЧЕСКАЯ РАБОТА №6
«Расчет ЭДС и токов асинхронных двигателей»
ЦЕЛЬ РАБОТЫ: рассчитать значение скольжения, ЭДС асинхронного двигателя и величину протекающих в нем токов.
КРАТКИЕ ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ:
В соответствии с принципом обратимости электрических машин асинхронные машины могут работать как в двигательном, так и в генераторном режимах. Кроме того, возможен еще и режим электромагнитного торможения противовключением.
Двигательный режим. При включении обмотки статора в сеть трехфазного тока возникает вращающееся магнитное поле, которое, сцепляясь с короткозамкнутой обмоткой ротора, наводит в ней ЭДС. При этом в стержнях обмотки ротора появляются токи. В результате взаимодействия этих токов с вращающимся магнитным полем на роторе возникают электромагнитные силы. Совокупность этих сил создает электромагнитный вращающий момент, под действием которого ротор асинхронного двигателя приходит во вращение с частотой n2 < n1 в сторону вращения поля статора. Если вал асинхронного двигателя механически соединить с валом какого-либо исполнительного механизма ИМ (станка, подъемного крана и т. п.), то вращающий момент двигателя М, преодолев противодействующий (нагрузочный) момент Мнагр, исполнительного механизма, приведет механизм во вращение. Следовательно, электрическая мощность Р1, поступающая в двигатель из сети, в основной своей части преобразуется в механическую мощность Р1 и передается исполнительному механизму ИМ.
п.), то вращающий момент двигателя М, преодолев противодействующий (нагрузочный) момент Мнагр, исполнительного механизма, приведет механизм во вращение. Следовательно, электрическая мощность Р1, поступающая в двигатель из сети, в основной своей части преобразуется в механическую мощность Р1 и передается исполнительному механизму ИМ.
Весьма важным параметром асинхронной машины является скольжение — величина, характеризующая разность частот вращения ротора и вращающегося поля статора:
S = (n1 – n2)/ n1 (формула 6.1)
Скольжение выражают в долях единицы либо в процентах. В последнем случае величину, полученную по (6.1), следует умножить на 100.
С увеличением нагрузочного момента на валу асинхронного двигателя частота вращения ротора n2 уменьшается. Следовательно, скольжение асинхронного двигателя зависит от механической нагрузки на валу двигателя и может изменяться в диапазоне 0 < s ≤ 1.
Скольжение, соответствующее номинальной нагрузке двигателя, называют номинальным скольжением shom. Для асинхронных двигателей общего назначения shom = 18%, при этом для двигателей большой мощности sном = 1%, а для двигателей малой мощности sном = 8%.
Формула для определения асинхронной частоты вращения (об/мин):
n2 = n1(1-s). (формула 6.2)
Пример 6.1. Трехфазный асинхронный двигатель с числом полюсов 2р = 4 работает от сети с частотой тока f1 = 50 Гц. Определить частоту вращения двигателя при номинальной нагрузке, если скольжение при этом составляет 6%.
Решение. Синхронная частота вращения по (6.9) n1 = f1 60/ р = 50 • 60/4 = 1500 об/мин.
Номинальная частота вращения по (6.2): nном = n1(1 – sном ) = 1500(1 – 0,06) = 1412 об/мин.
Генераторный режим. Если обмотку статора включить в сеть, а ротор асинхронной машины посредством приводного двигателя ПД (двигатель внутреннего сгорания, турбина и т. п.), являющегося источником механической энергии, вращать в направлении вращения магнитного поля статора с частотой n2 > n1, то направление движения ротора относительно поля статора изменится на обратное (по сравнению с двигательным режимом работы пой машины), так как ротор будет обгонять поле статора. При этом скольжение станет отрицательным, а ЭДС, наведенная в обмотке ротора, изменит свое направление. Электромагнитный момент на роторе М также изменит свое направление, т. е. будет направлен встречно вращающемуся магнитному полю статора и станет тормозящим по отношению к вращающемуся моменту приводного двигателя М1. В этом случае механическая мощность приводного двигателя в основной своей части будет преобразована в электрическую активную мощность Р2 переменного тока. Особенность работы асинхронного генератора состоит в том, что вращающееся магнитное поле в нем создается реактивной мощностью Q трехфазной сети, в которую включен генератор и да он отдает вырабатываемую активную мощность Р2. Следовательно, для работы асинхронного генератора необходим источник переменного тока, при подключении к которому происходит возбуждение генератора.
Скольжение асинхронной машины в генераторном режиме может изменяться в диапазоне – ∞ < s < 0, т. е. оно может принимать любые отрицательные значения.
Наибольшее практическое применение получил двигательный режим асинхронной машины, т. е. чаще используют асинхронные двигатели, которые составляют основу современного электропривода, выгодно отличаясь от других электродвигателей простотой конструкции и высокой надежностью.
Магнитодвижущая сила обмотки статора создает магнитный поток, который замыкается через элементы магнитной системы машины. Магнитную систему асинхронной машины называют неявнополюсной, так как она не имеет явно выраженных магнитных полюсов. Количество магнитных полюсов в неявнополюсной магнитной системе определяется числом полюсов в обмотке, возбуждающей магнитное поле, в данном случае в обмотке статора. Магнитная система машины, состоящая из сердечников статора и ротора, представляет собой разветвленную симметричную магнитную цепь.
Значение МДС на пару полюсов позволяет определить намагничивающий ток (основную гармонику) обмотки статора:
I1μ = (формула 6.3)
Исходным параметром при расчете магнитной цепи асинхронного двигателя является максимальная магнитная индукция в воздушном зазоре Вδ. Величину Вδ принимают по рекомендуемым значениям в зависимости от наружного диаметра сердечника статора D1нар и числа полюсов 2р.
Магнитная индукция Вδ определяет магнитную нагрузку двигателя: при слишком малом Вδ магнитная система двигателя недогружена, а поэтому габаритные размеры двигателя получаются неоправданно большими; если же задаться чрезмерно большим течением Вδ, то резко возрастут магнитные напряжения на участках магнитной системы, особенно в зубцовых слоях статора и ротopa, в результате возрастет намагничивающий ток статора I1μ снизится КПД двигателя.
Расчет магнитной цепи асинхронного двигателя. Расчет магнитной цепи электрической машины состоит в основном в определении магнитных напряжений для всех ее участков. Магнитное напряжение Fx для любого участка магнитной цепи равно произведению напряженности поля на этом участке Нх на его длину lХ.
Участки магнитной цепи различаются конфигурацией, размерами и материалом. Наибольшее магнитное напряжение в воздушном зазоре δ. Напряженность магнитного поля в воздушном зазоре
Hδ = Bδ/ μ0, где μ0 = 4π/ 10-7 Гн/м. Расчетная длина зазора lδ = δkδ , где kδ, — коэффициент воздушного зазора, учитывающий увеличение магнитного сопротивления зазора, вызванное зубчатостью поверхностей статора и ротора, ограничивающих воздушный зазор в асинхронном двигателе (kδ > 1). Учитывая это, получим выражение магнитного напряжения воздушного зазора (А):
Fδ = 0,8 Bδ δ kδ 103. (формула 6.4)
где δ — значение одностороннего воздушного зазора, мм.
Обычно магнитное напряжение двух воздушных зазоров, входящих в расчетную часть магнитной цепи асинхронного двигателя, составляет — 85% от суммарной МДС на пару полюсов . Из этого следует, насколько значительно влияние величины воздушного зазора δ на свойства двигателя. С увеличением δ МДС значительно возрастает, что ведет к увеличению намагничивающего тока статора I1μ, а, следовательно, ведет к росту потерь и снижению КПД двигателя. И наоборот, с уменьшением δ уменьшается , что ведет к росту КПД, т. е. двигатель становится более экономичным в эксплуатации. Однако при слишком малых зазорах δ усложняется изготовление двигателя (он становится менее технологичным), так как требует более высокой точности при обработке деталей и сборке двигателя. При этом снижается надежность двигателя – возрастает вероятность возникновения неравномерности зазора и, как следствие, вероятность задевания ротора о статор.
Пример 6.2. Воздушный зазор трехфазного асинхронного двигателя δ = 0,5 мм, максимальное значение магнитной индукции Вδ = 0,9 Тл. Обмотка статора четырехполюсная, число последовательно соединенных витков в обмотке одной фазы ω1 = 130, обмоточный коэффициент kоб1 = 0,91. Определить значение намагничивающего тока обмотки статора I1μ, если коэффициент воздушного зазора kδ = 1,38, а коэффициент магнитного насыщения kμ = 1,4.
Решение.
Магнитное напряжение воздушного зазора по (6 .4)
Fδ = 0,8 Вδδ kδ • 103 = 0,8 • 0,9 • 0,5 • 1,38 • 103 = 497 A.
Так как коэффициент магнитного насыщения kμ = ном / (2Fδ), то МДС обмотки статора в режиме х.х. на пару полюсов ном = 2Fδkμ =2 • 497 • 1,4 = 1392 А.
Намагничивающий ток статора по (6.3)
I1μ = p ном / (0,9 m1ω1kоб1) = 2 • 1392 / (0,9 • 3 • 130 • 0,91) = 8,7 A
Если воздушный зазор данного двигателя увеличить на 20%, т. е. принять δ = 0,6 мм (при прочих неизменных условиях), то намагничивающий ток статора станет равным I1μ = 10,4 А, т. е. он возрастет пропорционально увеличению воздушного зазора.
Электродвижущие силы, наводимые в обмотке ротора. Асинхронный двигатель аналогичен трансформатору, у которого вторичная обмотка (обмотка ротора) вращается. При этом вращающийся магнитный поток сцепляется не только с обмоткой статора, где индуцирует ЭДС Еи но и с обмоткой вращающегося ротора, где индуцирует ЭДС. В процессе работы асинхронного двигателя ротор вращается в сторону вращения поля статора с частотой n2. Поэтому частота вращения поля статора относительно ротора равна разности частот вращения (n1 – n2). Основной магнитный поток Ф, обгоняя ротор с частотой вращения ns= (n1 – n2), индуцирует в обмотке ротора ЭДС
Е2 = 4,44 f2 Ф ω2 коб2 (формула 6.5)
где f2— частота ЭДС Е2s в роторе, Гц; ω2 — число последовательно соединенных витков одной фазы обмотки ротора; ko62 — обмоточный коэффициент обмотки ротора.
Частота ЭДС (тока) в обмотке вращающегося ротора пропорциональна частоте вращения магнитного поля относительно ротора ns = n1 – n2, называемой частотой скольжения:
f2 = pns / 60 = p(n1 – n2) / 60,
или
f2 = = = f1s (формула 6.6)
т. е. частота ЭДС (тока) ротора пропорциональна скольжению. Для асинхронных двигателей общепромышленного назначения эта частота обычно невелика и при f1 = 50 Гц не превышает нескольких герц, так при s = 5% частота f2 = 50 0,05 = 2,5 Гц.
E2s = 4,44 f1 s Ф ω2 kоб2 = E2 s. (формула 6.7)
Здесь Е2 – ЭДС, наведенная в обмотке ротора при скольжении s = 1, т. е. при неподвижном роторе, В.
Уравнения МДС и токов асинхронного двигателя. МДС обмоток статора и ротора на один полюс в режиме нагруженного двигателя
F1 = 0,45 m1 I1 ω1 kоб1/ P
F2 = 0,45 m2 I2 ω2 kоб2/ P (формула 6.8)
где m2 — число фаз в обмотке ротора; ko62 — обмоточный коэффициент обмотки ротора.
С подключением нагрузки в фазах обмотки статора появляются токи IА, IB, IC. При этом трехфазная обмотка статора создает вращающееся магнитное поле. Частота вращения этого поля равна частоте вращения ротора генератора (об/мин):
n1 = f160/p. (формула 6.9)
ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ:
Решить задачу №1. В табл. 6.1 приведены данные следующих параметров трехфазного асинхронного двигателя с короткозамкнутым ротором: основной магнитный поток ф, число последовательно соединенных витков в обмотке статора, номинальное скольжение , ЭДС, индуцируемая в обмотке ротора при его неподвижном состоянии , и ЭДС ротора при его вращении с номинальным скольжением E2s, частота этой ЭДС f2 при частоте вращения ротора nном. Частота тока в питающей сети 50 Гц. Требуется определить значения параметров, не указанные в таблице в каждом из вариантов.
Таблица 6.1.
ПараметрВарианты
1
2
3
4
5
6
7
8
9
10
Ф, Вб
0,028
0,032
0,048
−
0,025
−
−
0,028
0,028
−
Kоб1
0,95
0,96
0,96
0,98
0,98
0,96
0,95
0,95
0,98
0,98
1, витков
18
−
24
16
−
24
18
−
36
18
Sном
0,04
−
0,05
0,04
−
0,05
−
−
−
−
2p
4
6
2
4
−
8
4
8
−
4
E1ф, В
−
210
−
98
110
200
−
120
−
100
E2,В
−
−
−
−
−
−
−
−
−
−
E2s,В
−
−
−
−
−
−
0,13
−
−
−
f2, Гц
−
−
−
−
−
−
2,5
3,2
−
2,5
nном, об/мин
−
970
−
−
2920
−
−
−
1470
−
Решить задачу №2. В табл.6.2. приведены значения следующих параметров трехфазного асинхронного двигателя: односторонний воздушный зазор между статором и ротором δ, число полюсов 2Ƥ, число пазов , максимальное значение магнитной индукции в воздушном зазоре , число витков в одной катушке обмотки статора (все катушки фазной обмотки соединены последовательно), обмоточный коэффициент обмотки статора для основной гармоники , коэффициент магнитного насыщения , коэффициент воздушного зазора , Необходимо определить величину намагничивающего тока статора при заданном воздушном зазоре.
Таблица 6.2.
ПараметрыВарианты
1
2
3
4
5
6
7
8
9
10
δ,мм
0,6
0,4
0,8
0,5
0,7
0,3
0,4
0,7
0,5
0,6
2Ƥ
6
4
8
6
6
2
4
6
4
8
Число пазов
24
24
48
36
60
18
36
48
32
54
,Тл
0,9
0,8
0,9
1,0
0,7
0,8
0,8
1,0
0,7
0,9
Число витков
8
7
6
8
5
4
5
5
6
4
0,91
0,95
0,92
0,94
0,96
0,92
0,92
0,94
0,93
0,92
1,37
1,35
1,38
1,40
1,35
1,40
1,34
1,37
1,35
1,38
1,30
1,35
1,36
1,38
1,34
1,37
1,35
1,36
1,34
1,38
Решение:
Определить величину магнитного напряжения воздушного зазора.
Определить значение МДС обмотки статора на пару полюсов в режиме холостого хода номинальном подведении напряжении.
Определить число последовательно соединенных витков фазной обмотки статора.
Определить величину намагничивающего тока статора.
3. Решить задачу №3. Трехфазный асинхронный двигатель с фазным ротором имеет данные, приведенные в табл. 6.3. максимальное значение магнитной индукции в воздушном зазоре Вδ, диаметр расточки статора D1, длина сердечника статора l1, равная 0,81D1, число полюсов в обмотках статора и ротора 2р, число последовательно соединенных витков в фазных обмотках статора ω1 и ротора ω2, обмоточные коэффициенты для основной гармоники статора коб1 и ротора коб2 принять равными коб1 = киб2 = 0,93. Требуется определить фазные значения ЭДС в обмотке статора Е1 и в обмотке фазного ротора при неподвижном его состоянии Е2 и вращающемся со скольжением s, частоту тока в неподвижном и вращающемся роторе. Частота тока в питающей сети f = 50 Гц.
Таблица 6.3.
ПараметрВарианты
1
2
3
4
5
6
7
8
9
10
Вδ , Тл
1,5
1,35
1,50
1,40
1,45
1,50
1,38
1,45
1,50
1,38
D1, мм
180
160
228
235
160
300
280
320
360
290
l1, мм
141
130
180
190
130
250
250
270
300
250
2 р
4
4
4
6
4
4
6
4
8
6
ω1
48
18
24
32
48
36
32
36
12
24
ω2
8
4
6
10
16
12
16
18
8
12
s, %
8
12
10
6
5
12
8
10
6
8
Решение:
Определить полюсное деление.
Определить величину основного магнитного потока.
Определить ЭДС фазной обмотки статора.
Определить ЭДС в обмотке неподвижного ротора.
Определить ЭДС во вращающемся роторе при скольжении 8 %.
Определить частоту тока во вращающемся роторе при скольжении 8 %.
4. Решить задачу №4. Трехфазный асинхронный двигатель с короткозамкнутым ротором серии 4А имеет технические данные, приведенные в табл. 6.4. Определить высоту оси вращения h, число полюсов 2p, скольжение при номинальной нагрузке sном, момент на валу Мном, начальный пусковой Мn и максимальный момент, потребляемую двигателем из сети активную мощность Р1ном, суммарные потери при номинальной нагрузки ∑Р, номинальный и пусковой токи I1ном и In в питающей сети при соединении обмоток статора «звездой» и «треугольником».
Таблица 6.4.
В
Тип двигателя
Pном,
кВт
n2ном,
об/мин
nном,
%
U1,В
1
4A100S2У3
4,0
2880
86,5
0,89
7,5
2,0
2,5
220/380
2
4A160S2У3
15,0
2945
88,0
0,91
7,0
1,4
2,2
220/380
3
4A200М2У3
37,0
2945
90,0
0,89
7,5
1,4
2,5
380/660
4
4A112М2У3
5,5
1445
85,5
0,85
7,0
2,0
2,2
220/380
5
4A132М2У3
11,0
1460
87,5
0,87
7,5
2,2
3,0
220/380
6
4A180М2У3
30,0
1470
91,0
0,89
6,5
1,4
2,3
380/660
7
4A200М6У3
22,0
475
90,0
0,90
6,5
1,3
2,4
220/380
8
4A280М6У3
90,0
985
92,5
0,89
5,5
1,4
2,2
380/660
9
4A315М8У3
110
740
93,0
0,85
6,5
1,2
2,3
380/660
10
4A355М10У3
110
590
93,0
0,83
6,0
1,0
1,8
380/660
Решение:
В обозначении типоразмера двигателя цифры, стоящие после обозначения серии 4А, указывают на высоту оси вращения (мм).
Следующая далее цифра указывает на число плюсов 2p.
Определить синхронную частоту вращения при частоте переменного тока 50 Гц.
Определить скольжение при номинальной нагрузке =/.
Определить момент на валу двигателя (полезный момент двигателя) при номинальной нагрузке = 9,55/.
Определить начальный пусковой момент. =().
Определить максимальный (критический)момент двигателя по его перегрузочной способности..
Определить номинальный ток в фазной обмотке статора.
Определить потребляемую двигателем из сети активную мощность в режиме номинальной нагрузки..
Определить суммарные потери двигателя при номинальной нагрузке
=
Определить линейный ток статора: при соединении обмоток статора «звездой» =.
При соединении обмоток статора «треугольником» .
Решить задачу №5. Трехфазный асинхронный двигатель с фазным ротором имеет эффективное число витков в фазных обмотках статора и ротора , ЭДС фазной обмотки статора = 0,95, ЭДС фазной обмотки неподвижного ротора , а вращающегося со скольжением s, равно . Используя приведенные в табл. 6.5. значения параметров, определить неуказанные значения, если напряжение питания двигателя = 220/380 B.
Таблица 6.5.
ПараметрВарианты
1
2
3
4
5
6
7
8
9
10
18
24
—
32
—
36
—
24
—
48
12
—
18
—
12
—
18
—
16
—
, B
—
—
—
—
—
—
—
—
—
—
, B
—
93
—
105
—
104
—
98
—
110
, B
—
5,58
6,5
5,25
5,8
—
4,0
5,8
4,6
—
s
0,05
—
0,04
—
0,07
0,05
0,03
—
0,05
0,04
Оформить отчет по практической работе.
Ответить на контрольные вопросы.
Сделать вывод о проделанной работе.
КОНТРОЛЬНЫЕ ВОПРОСЫ:
Что такое скольжение асинхронной машины?
Какие режимы работы синхронной машины существуют?
Каков диапазон изменения скольжения асинхронной машины в различных режимах ее работы?
Что такое номинальное скольжение?
С какой целью обмотку статора асинхронного генератора подключают к сети трехфазного тока?
Какова цель расчета магнитной цепи асинхронной машины?
Как влияет выбор значения магнитной индукции в воздушном зазоре на свойства асинхронного двигателя?
В чем сходство трансформатора и асинхронного двигателя?
асинхронного двигателя – цепь ротора и статора
Эквивалентная схема асинхронного двигателя обеспечивает рабочие характеристики, которые оцениваются для установившихся условий. Асинхронный двигатель основан на принципе индукции напряжений и токов. Напряжение и ток индуцируются в цепи ротора из цепи статора для работы. Эквивалентная схема асинхронного двигателя аналогична схеме замещения трансформатора.
Состав:
Модель цепи статораМодель цепи статора асинхронного двигателя состоит из сопротивления фазной обмотки статора R 1 , реактивного сопротивления утечки фазы статора X 1 , как показано на принципиальной схеме ниже:
Ток холостого хода I 0 моделируется чисто индуктивным реактором X 0 с намагничивающей составляющей I µ и безиндуктивным резистором R 0 , несущим ток потерь в сердечнике I ω .Таким образом,
Полный ток намагничивания I 0 в случае асинхронного двигателя значительно больше, чем у трансформатора. Это связано с более высоким сопротивлением, вызванным воздушным зазором асинхронного двигателя. Как мы знаем, в трансформаторе ток холостого хода варьируется от 2 до 5% номинального тока, тогда как в асинхронном двигателе ток холостого хода составляет примерно 25-40% номинального тока в зависимости от от размера мотора.Значение намагничивающего реактивного сопротивления X 0 также очень мало в асинхронном двигателе.
Модель цепи ротора
Когда на обмотки статора подается трехфазное питание, в обмотках ротора машины индуцируется напряжение. Чем больше будет относительное движение ротора и магнитных полей статора, тем больше будет результирующее напряжение ротора. Наибольшее относительное движение происходит в состоянии покоя. Это состояние также известно как состояние заблокированного ротора или заблокированного ротора.Если индуцированное напряжение ротора в этом состоянии составляет E 20 , тогда индуцированное напряжение при любом скольжении определяется уравнением, показанным ниже:
Сопротивление ротора постоянно и не зависит от скольжения. Реактивное сопротивление асинхронного двигателя зависит от индуктивности ротора и частоты напряжения и тока в роторе.
Если L 2 – индуктивность ротора, реактивное сопротивление ротора определяется уравнением, показанным ниже:
Но, как известно,
Следовательно,
Где X 20 – реактивное сопротивление ротора в состоянии покоя.
Схема ротора показана ниже:
Импеданс ротора определяется уравнением ниже:
Ток ротора по фазе определяется уравнением, показанным ниже:
Здесь I 2 – ток частоты скольжения, создаваемый напряжением sE 20 , индуцированным частотой скольжения, действующим в цепи ротора, имеющим полное сопротивление на фазу (R 2 + jsX 20 ).
Теперь, разделив уравнение (5) на промах s, мы получим следующее уравнение:
R 2 – это постоянное сопротивление и переменное реактивное сопротивление утечки sX 20 .Аналогично, схема ротора, показанная ниже, имеет постоянное реактивное сопротивление рассеяния X 20 и переменное сопротивление R 2 / с.
Уравнение (6) выше объясняет вторичную цепь воображаемого трансформатора с постоянным соотношением напряжений и одинаковой частотой на обеих сторонах. Этот воображаемый неподвижный ротор проводит тот же ток, что и действительный вращающийся ротор. Это позволяет передавать полное сопротивление вторичного ротора на сторону первичного статора.
Примерная эквивалентная схема асинхронного двигателя
Эквивалентная схема дополнительно упрощается за счет смещения ветвей полного сопротивления шунта R 0 и X 0 на входные клеммы, как показано на принципиальной схеме ниже:
Примерная схема основана на предположении, что V 1 = E 1 = E ’ 2 .В приведенной выше схеме единственный компонент, который зависит от скольжения, – это сопротивление. Все остальные количества постоянны. Следующие уравнения могут быть записаны на любом заданном бланке s следующим образом:
Импеданс за пределами AA ’определяется как:
Подставляя значение ZAA ’из уравнения (7) в уравнение (8), получаем
Следовательно,
Ток холостого хода I 0 –
Полный ток статора определяется уравнением, показанным ниже:
Общие потери в сердечнике рассчитываются по приведенному ниже уравнению:
Мощность воздушного зазора на фазу определяется как: развиваемый крутящий момент определяется уравнением, приведенным ниже:
Приведенное выше уравнение является уравнением крутящего момента асинхронного двигателя.Приблизительная модель эквивалентной схемы является стандартом для всех расчетов производительности асинхронного двигателя.
Асинхронный двигатель– обзор
Частотно-регулируемые приводы
Асинхронные и синхронные двигатели рассчитаны на определенное соотношение напряжения к частоте ( В, / Гц). Напряжение – это напряжение питания двигателя, а частота – это частота питания. Отношение В, / Гц прямо пропорционально величине магнитного потока в магнитном материале двигателя (пластинах сердечника статора и ротора).Крутящий момент, развиваемый на валу двигателя, пропорционален силе вращающегося потока. Тип и количество магнитного материала, используемого в конструкции двигателя, являются факторами, определяющими номинальную мощность двигателя.
При постоянной частоте питающей сети более высокое напряжение вызывает более высокое отношение В, / Гц и более высокий магнитный поток. При постоянном напряжении питания более низкая частота питания приведет к более высокому соотношению В, / Гц и более высокому потоку. Более высокий магнитный поток увеличивает крутящий момент двигателя. Когда двигатель работает при более высоком напряжении В, / Гц, чем номинальное, возникает перенапряжение, которое может вызвать насыщение статора и магнитного сердечника ротора.Насыщение вызывает перегрев и может привести к отказу двигателя. Когда двигатель работает при напряжении В / Гц ниже номинального, магнитный поток уменьшается. Уменьшение магнитного потока снижает крутящий момент и влияет на способность двигателя выдерживать нагрузку.
Когда двигатели питаются напрямую от электросети, частота питающей сети остается постоянной, а напряжение и ток изменяются во время запуска двигателя. Во время разгона двигателя до синхронной скорости (синхронные двигатели) или скорости, близкой к синхронной (асинхронные двигатели), ток сначала возрастет в несколько раз по сравнению с номинальным током и вызовет падение напряжения.Более низкое напряжение при постоянной частоте питания означает более низкое соотношение В, / Гц и меньший магнитный поток, который влияет на крутящий момент. Как только двигатель разгоняется, напряжение восстанавливается до значения, близкого к номинальному, а крутящий момент на валу двигателя достигает номинального значения. В этом случае скорость двигателя будет постоянной и синхронной (синхронные двигатели) или близкой к синхронной (асинхронные двигатели). Если двигатели подключены напрямую к электросети, скорость определяется фиксированной частотой сети и не может контролироваться.Для управления скоростью при необходимости используются дополнительные механические системы: демпферы, клапаны, коробки передач, тормоза и т. Д. Механические системы снижают общую эффективность системы. Кроме того, как объяснялось ранее, асинхронные двигатели потребляют реактивную мощность, поэтому поддержание коэффициента мощности может быть проблемой для асинхронных двигателей. Синхронные двигатели не вызывают проблем с коэффициентом мощности, они действительно могут помочь.
Существует четыре категории проблем с двигателями, подключенными непосредственно к сети электропитания: высокий пусковой ток, контроль крутящего момента, контроль скорости и коэффициент мощности (только для асинхронных двигателей).Одним из эффективных способов решения проблем является использование частотно-регулируемых приводов. При использовании частотно-регулируемых приводов питание привода осуществляется от сети, а питание двигателя – от привода.
ЧРПуправляют скоростью и крутящим моментом двигателя, контролируя частоту и величину напряжений и токов, подаваемых на двигатель. Каждый частотно-регулируемый привод имеет три секции: выпрямитель, фильтр с накопителем энергии и инвертор. Типичная концептуальная конфигурация показана на рис. 7.22.
Рис. 7.22. Типичная конфигурация ЧРП.
Выпрямитель берет синусоиду фиксированной частоты и величины напряжения из сети и выпрямляет ее в форму сигнала постоянного тока.
Фильтр принимает форму сигнала постоянного тока от выпрямителя и обеспечивает почти чистый линейный постоянный ток. Накопитель энергии используется для поддержания мгновенного энергетического баланса. Если при сбалансированной трехфазной нагрузке общая мощность остается постоянной от момента к моменту, а с идеальным преобразователем, накопление энергии не потребуется. На практике преобразователям требуется накопитель энергии для хранения энергии, достаточной для питания двигателя в течение коротких интервалов, когда мощность нагрузки превышает входную мощность.Конденсаторы и индукторы используются для хранения энергии.
Инвертор преобразует мощность постоянного тока обратно в переменный ток через набор электронных переключателей (MOSFET (металлооксидный полупроводниковый полевой транзистор), IGBT (биполярный транзистор с изолированным затвором), IGCT (встроенный тиристор с коммутацией затвора), GTO (затвор) отключающий тиристор) и др.). Эти переключатели, открывая и закрываясь с определенной скоростью и продолжительностью, могут инвертировать постоянный ток и воссоздавать выходные токи и формы сигналов напряжения, которые имитируют синусоидальные формы сигналов переменного тока.Затем двигатель получает питание от выхода инвертора.
Формы выходных сигналов представляют собой сигналы с широтно-импульсной модуляцией (ШИМ). Они называются сигналами ШИМ, потому что они создаются несколькими импульсами переключателей с короткими интервалами. Величину и частоту сигналов напряжения ШИМ можно регулировать. Изменяя время, импульсы и какие переключатели срабатывают, частота может быть увеличена или уменьшена. Изменяя ширину и длительность импульсов, можно увеличивать и уменьшать среднее напряжение на двигателе.Типичная форма сигнала ШИМ с аппроксимируемой синусоидой показана на рис. 7.23.
Рис. 7.23. Типичная форма сигнала ШИМ с аппроксимируемой синусоидой.
При использовании в качестве примера асинхронного двигателя асинхронный двигатель может эффективно работать только при скорости, близкой к синхронной скорости вращающегося поля. Управление скоростью требует непрерывного изменения скорости вращающегося поля, что требует изменения частоты.
Когда выходное напряжение инвертора на каждой выходной частоте инвертора регулируется таким образом, чтобы соотношение В, / Гц поддерживалось постоянным до номинальной скорости, можно получить семейство кривых крутящего момента-скорости, аналогичных рис.7.24.
Рис. 7.24. График зависимости крутящего момента от частоты вращения асинхронного двигателя с частотно-регулируемым приводом с изменением напряжения и частоты и постоянным соотношением В / Гц.
Точка «a» на рис. 7.24 соответствует крутящему моменту без нагрузки и скорости без нагрузки при частоте питания инвертора 25 Гц. От без нагрузки в точке «a» до полной нагрузки в точке «b» скорость немного снизится. Если требуется поддерживать постоянную скорость из точки «а», регулятор частотно-регулируемого привода повысит частоту, так что рабочая точка при полной нагрузке переместится в точку «с».”Управление частотно-регулируемым приводом также будет повышать напряжение пропорционально увеличению частоты, чтобы поддерживать постоянное соотношение В, / Гц при полной нагрузке и, таким образом, поддерживать крутящий момент при полной нагрузке.
Из рис. 7.24 видно, что момент отрыва постоянен во всех точках ниже номинальной скорости, за исключением низких частот. На низких частотах тяговый момент снижается из-за сопротивления статора. Когда частота приближается к нулю, падение напряжения из-за сопротивления статора становится важным, и уменьшение магнитного потока, вызывающее уменьшение крутящего момента, становится заметным.Этот эффект известен и легко смягчается с помощью низкоскоростного повышения напряжения: увеличения отношения В, / f на низких частотах для восстановления магнитного потока. На рис. 7.25 показан типичный набор кривых крутящий момент-скорость для привода с повышением напряжения на низкой скорости.
Рис. 7.25. График зависимости крутящего момента от частоты вращения асинхронного двигателя с частотно-регулируемым приводом с изменением напряжения и частоты, постоянным соотношением В, / Гц до номинальной скорости и повышением напряжения на низкой скорости.
При превышении номинальной скорости соотношение В, / Гц больше не может поддерживаться постоянным, поскольку напряжение не может превышать номинальное напряжение двигателя, чтобы избежать пробоя изоляции двигателя.Повышение частоты сверх номинальной частоты возможно и приведет к более высокой скорости, но при сохранении напряжения на уровне номинального напряжения и, как следствие, уменьшении отношения В к / Гц, плотность магнитного потока и крутящий момент уменьшатся.
Преимущество двигателей, поставляемых с частотно-регулируемым приводом, заключается в том, что двигатель может обеспечивать одинаковый максимальный крутящий момент от нулевой до номинальной скорости. Эта область характеристики крутящий момент-скорость двигателя называется областью «постоянного крутящего момента». Непрерывная работа с максимальным крутящим моментом на практике не выполняется из-за тепловых ограничений.Верхний предел крутящего момента, равный номинальному крутящему моменту двигателя, обычно устанавливается в контроллере.
С двигателями, поставляемыми с частотно-регулируемым приводом, и с их наличием высокого крутящего момента на низких скоростях можно избежать проблем пуска, общих для операций с фиксированной частотой (начальное высокое скольжение, высокий пусковой ток, падение напряжения и уменьшение крутящего момента). Двигатель с ЧРП запускается с низкой частоты, которая постепенно увеличивается. Скорость скольжения ротора всегда мала, и ротор непрерывно работает с оптимальным крутящим моментом.Номинальный крутящий момент доступен на низких скоростях, а пусковой ток не превышает номинального тока полной нагрузки. Двигатель может запускаться от недельной сети электроснабжения, не вызывая нарушений напряжения в питающей сети.
Как упоминалось ранее, двигатель с частотно-регулируемым приводом может развивать любой крутящий момент до номинального крутящего момента на любой скорости вплоть до номинальной. Эта область называется областью «постоянного крутящего момента». При превышении номинальной скорости В / Гц будет снижаться, поскольку напряжение остается постоянным при номинальном напряжении двигателя, ток статора и ротора также остаются постоянными, а скорость и частота увеличиваются, поэтому плотность магнитного потока будет уменьшаться, а крутящий момент будет уменьшаться обратно пропорционально Частота.Эта область характеристики крутящий момент-скорость двигателя называется областью «постоянной мощности». Область постоянной мощности примерно в два раза превышает номинальную скорость. За пределами области постоянной мощности находится область высоких скоростей, где предел тока совпадает с пределом крутящего момента отрыва, который уменьшается обратно пропорционально квадрату частоты, поэтому постоянная мощность больше не может поддерживаться. Области постоянного крутящего момента, постоянной мощности и высокой скорости показаны на рис. 7.26.
Рис. 7.26. ЧРП предоставил кривую крутящего момента-скорости асинхронного двигателя в области постоянного крутящего момента, постоянной мощности и высокой скорости.
В двигателях с ЧРП важно отметить, что кривые крутящий момент-скорость показывают крутящий момент, который двигатель может создать для каждой частоты, но не то, как долго и может ли двигатель работать в каждом состоянии непрерывно. Если в приложении с двигателем, поставляемым с частотно-регулируемым приводом, используется стандартный асинхронный двигатель, необходимо учитывать ограничения по нагреву. Стандартный промышленный двигатель обычно заключен в корпус с вентилятором, установленным на внешнем валу, который обдувает воздухом внешний корпус с оребрением. Стандартная конструкция и охлаждение двигателя предназначены для непрерывной работы при фиксированной частоте и номинальной скорости, подаваемой в сеть.Когда стандартный промышленный двигатель работает, подключенный к ЧРП, который производит низкую частоту и запускает двигатель на низкой скорости, охлаждение двигателя становится проблемой. Двигатель будет способен создавать номинальный крутящий момент на низкой скорости, но в этих условиях он будет работать при более высоких температурах, что может существенно повлиять на срок службы двигателя или вызвать перегрев и отказ двигателя.
Когда двигатель используется в приложениях с частотно-регулируемым приводом, важно указать сценарии работы, соответствующим образом спроектировать охлаждение и использовать двигатели, подходящие для работы с инвертором.
Помимо охлаждения, при использовании двигателей с частотно-регулируемым приводом при проектировании необходимо учитывать и другие факторы, такие как влияние гармоник от частотно-регулируемого привода к сети, конфигурация кабеля и размер кабеля от частотно-регулируемого привода к двигателю и т. Д. .
Разница между синхронным двигателем и асинхронным двигателем
Двигатели переменного тока можно разделить на две основные категории – (i) синхронный двигатель и (ii) асинхронный двигатель . Асинхронный двигатель обычно называют асинхронным двигателем.Оба типа сильно отличаются друг от друга. Основные различия между синхронным двигателем и асинхронным двигателем обсуждаются ниже.Конструктивная разница
- Синхронный двигатель : Статор имеет осевые пазы, которые состоят из обмотки статора, намотанной на определенное количество полюсов. Обычно используется ротор с явнополюсным ротором, на котором установлена обмотка ротора. Обмотка ротора запитана постоянным током с помощью контактных колец. Также можно использовать ротор с постоянными магнитами.
Синхронный двигатель - Асинхронный двигатель : Обмотка статора аналогична обмотке синхронного двигателя. Он накручивается на определенное количество полюсов. Можно использовать ротор с короткозамкнутым ротором или ротор с обмоткой. В роторе с короткозамкнутым ротором стержни ротора постоянно замкнуты накоротко с концевыми кольцами. В роторе с намоткой обмотки также постоянно закорочены, поэтому контактные кольца не требуются.
Асинхронный двигатель
Разница в работе
- Синхронный двигатель : Полюса статора вращаются с синхронной скоростью (Нс) при питании от трехфазного источника питания. Ротор питается от источника постоянного тока. Во время пуска ротор необходимо вращать со скоростью, близкой к синхронной. В этом случае полюса ротора магнитно соединяются с вращающимися полюсами статора, и, таким образом, ротор начинает вращаться с синхронной скоростью.
- Синхронный двигатель всегда работает со скоростью, равной его синхронной скорости.
т.е. фактическая скорость = синхронная скорость
или N = Ns = 120f / P - Узнайте больше о работе синхронного двигателя здесь.
- Асинхронный двигатель : Когда на статор подается двух- или трехфазный источник переменного тока, создается вращающееся магнитное поле (RMF). Относительная скорость между вращающимся магнитным полем статора и ротором вызовет индуцированный ток в проводниках ротора.Ток ротора порождает поток ротора. Согласно закону Ленца, направление этого индуцированного тока таково, что он будет иметь тенденцию противодействовать причине его образования, то есть относительной скорости между RMF статора и ротором. Таким образом, ротор будет пытаться догнать RMF и снизить относительную скорость.
Прочие отличия
- Синхронным двигателям требуется дополнительный источник постоянного тока для питания обмотки ротора. Асинхронные двигатели не требуют дополнительного источника питания.
- Контактные кольца и щетки необходимы в синхронных двигателях, но не в асинхронных двигателях (за исключением асинхронного двигателя с обмоткой, в котором двигатели с контактным кольцом используются для добавления внешнего сопротивления обмотке ротора). Синхронным двигателям
- требуется дополнительный пусковой механизм для первоначального вращения ротора, близкого к синхронной скорости. В асинхронных двигателях пусковой механизм не требуется.
- Коэффициент мощности синхронного двигателя можно отрегулировать на отстающий, единичный или опережающий, изменяя возбуждение, тогда как асинхронный двигатель всегда работает с отстающим коэффициентом мощности.
- Синхронные двигатели обычно более эффективны, чем асинхронные двигатели.
- Синхронные двигатели дороже.
Модель динамики трехфазной асинхронной машины, также известной как индукционная машина, в единицах СИ или о.у.
Представлять ли крутящий момент, приложенный к валу или ротору. скорость как входной сигнал блока Simulink ® , или чтобы представить машинный вал Вращающийся механический порт Simscape ™.
Выберите Torque Tm , чтобы указать входной крутящий момент в Н.м или в пу,
а так и выставить порт Тм . Скорость машины
определяется по инерции станка Дж (для СИ
машины) или константа инерции H (для машины pu)
и разницей между приложенным механическим крутящим моментом Tm , и внутренний электромагнитный момент, Те . Когда скорость положительная, положительный крутящий момент
сигнал указывает на режим двигателя, а отрицательный сигнал указывает на генератор
режим.
Выберите Speed w , чтобы указать входную скорость в
рад / с или в о.у., и выставить порт w . Машина
скорость навязывается и механическая часть модели (машина
инерция J ) игнорируется. Используя скорость как
механический ввод позволяет моделировать механическую связь между двумя
машины.
На рисунке показано, как смоделировать жесткое соединение валов в мотор-генераторной установке. когда в машине 2 не учитывается момент трения.Скорость вывода машина 1 (двигатель) подключена к входу скорости машины 2 ( генератор), а выход электромагнитного момента машины 2 Te применяется к механическому входу крутящего момента Tm станка 1. Коэффициент Kw учитывает единицы скорости обеих машин (рад / с или о.е.) и передаточное число коробки передач w2 / w1. Коэффициент KT учитывает единицы крутящего момента обеих машин (Н.м или пу) и номиналы машин. Также из-за инерции J2 игнорируется в машине 2, J2 относится к скорости машина 1 и должна быть добавлена к инерции машины 1 Дж1 .
Выберите Механический вращающийся порт , чтобы открыть механический вращающийся порт Simscape, S , который
позволяет соединять вал машины с другими блоками Simscape, имеющими механические порты вращения.
На рисунке показано, как подключить идеальный крутящий момент Исходный блок из библиотеки Simscape на вал машины для представления машины в в режиме двигателя или в режиме генератора, когда частота вращения ротора положительный.
Скольжение в электрических асинхронных двигателях
Асинхронный двигатель переменного тока (переменного тока) состоит из статора и ротора, и взаимодействие токов, протекающих в стержнях ротора, и вращающегося магнитного поля в статоре создает крутящий момент, который вращает двигатель. При нормальной работе с нагрузкой скорость ротора всегда отстает от скорости магнитного поля, позволяя стержням ротора разрезать магнитные силовые линии и создавать полезный крутящий момент.
Разница между синхронной скоростью магнитного поля электродвигателя и скоростью вращения вала составляет скольжение – измеряется в оборотах в минуту или частоте.
Скольжение увеличивается с увеличением нагрузки, обеспечивая больший крутящий момент.
Обычно скольжение выражается как отношение скорости вращения вала к скорости синхронного магнитного поля.
s = (n s – n a ) 100% / n s (1)
где
s = скольжение
n s = синхронная скорость магнитного поля (об / мин, об / мин)
n a = скорость вращения вала (об / мин, об / мин)
Когда ротор не вращается, скольжение 100% .
Проскальзывание при полной нагрузке варьируется от менее 1% для двигателей с высокой мощностью до более 5–6% для двигателей с малой мощностью.
| Размер двигателя (л. 2,5 1,7 | 0,8 | |
|---|
Число полюсов, частоты и скорость синхронного асинхронного двигателя
| No.магнитных полюсов | Частота (Гц) | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 50 | 60 | |||||||||||
| 2 | 3000 | 3600 | ||||||||||
| 1500 | 1000 | 1200 | ||||||||||
| 8 | 750 | 900 | ||||||||||
| 10 | 600 | 720 | ||||||||||
| 12 | 500 | 600 | 9022 9022 | |||||||||
| 20 | 300 | 360 | ||||||||||
Скольжение и напряжение
Когда двигатель начинает вращаться, скольжение составляет 100% , а ток двигателя максимальный.Скольжение и ток двигателя уменьшаются, когда ротор начинает вращаться.
Частота скольжения
Частота уменьшается при уменьшении скольжения.
Реактивное сопротивление скольжения и индуктивное сопротивление
Индуктивное реактивное сопротивление зависит от частоты и скольжения. Когда ротор не вращается, частота скольжения максимальна, как и индуктивное сопротивление.
Двигатель имеет сопротивление и индуктивность, и когда ротор вращается, индуктивное реактивное сопротивление низкое, а коэффициент мощности приближается к и .
Полное сопротивление скольжения и ротора
Индуктивное реактивное сопротивление будет изменяться со скольжением, поскольку полное сопротивление ротора является суммой фаз постоянного сопротивления и переменного индуктивного реактивного сопротивления.
Когда двигатель начинает вращаться, индуктивное реактивное сопротивление высокое, а полное сопротивление в основном индуктивное. Ротор имеет низкий коэффициент мощности. Когда скорость увеличивается, индуктивное реактивное сопротивление уменьшается до уровня сопротивления.
Классификация асинхронных двигателей
Электрические асинхронные двигатели предназначены для различных применений в отношении таких характеристик, как момент срабатывания, тяговый момент, скольжение и т. Д. – проверьте классификацию электрических асинхронных двигателей NEMA A, B, C и D.
Что такое двигатель с обмоткой ротора и как он работает?
Электродвигатели – машины, преобразующие электричество в механическую энергию – повсеместно используются в мире машиностроения. Они являются краеугольным камнем инженерных достижений, таких как лифты, насосы и даже электромобили, благодаря способности использовать эффект электромагнитной индукции. Эти так называемые асинхронные двигатели используют переменный ток и электромагнетизм для создания вращательного движения и имеют множество конфигураций. Особый тип асинхронного двигателя переменного тока, известный как двигатели с фазным ротором, будет в центре внимания этой статьи.Хотя эти двигатели используются только в особых случаях, они имеют явное преимущество перед другими популярными вариантами (с короткозамкнутым ротором, синхронными двигателями и т. Д.) Благодаря своим уникальным характеристикам. Будут изучены анатомия и принцип действия этих двигателей, а также специфические характеристики, которые делают их столь важными для приложений, где другие, более популярные асинхронные двигатели не могут быть реализованы.
Что такое двигатели с фазным ротором?
Двигатели с фазным ротором представляют собой специализированный тип двигателей переменного тока и работают во многом так же, как и другие асинхронные двигатели.Они состоят из двух основных компонентов: внешнего статора и внутреннего ротора, разделенных небольшим воздушным зазором. Статор, как правило, одинаков для всех асинхронных двигателей и состоит из металлических пластин, удерживающих на месте обмотки из медной или алюминиевой проволоки. В статоре есть три отдельные катушки, которые питаются трехфазным переменным током, что просто означает, что каждая из них питается от отдельного переменного тока. Это не всегда так, поскольку некоторые двигатели являются однофазными двигателями, но двигатели с фазным ротором обычно всегда трехфазные.Тем не менее, эти три фазы создают магнитное поле, которое смещается вместе с переменными токами. Это создает вращающееся магнитное поле (RMF), которое действует на ротор. В двигателях с фазным ротором ротор «намотан» проводом, похожим на статор, а их концевые выводы соединены с 3 контактными кольцами на выходном валу. Эти контактные кольца прикреплены к щеткам и блокам резисторов переменной мощности, где операторы могут изменять скорость двигателя, изменяя сопротивление через катушки ротора. Эти контактные кольца позволяют регулировать скорость и крутящий момент и являются определяющей особенностью двигателей с фазным ротором (именно поэтому эти двигатели часто называют двигателями с фазным ротором).
Как работают двигатели с обмоткой ротора?
Мы рекомендуем прочитать нашу статью об асинхронных двигателях, чтобы понять основные законы, общие для всех асинхронных машин, но в этой статье кратко объясняется наука, лежащая в основе работы двигателя с фазным ротором.
Эти двигатели классифицируются как асинхронные двигатели, в которых существует несоответствие (известное как «проскальзывание») между скоростью RMF статора (синхронная скорость) и выходной скоростью (номинальная скорость). При создании необходимого тока, напряжения и магнитной силы в обмотках ротора двигатель всегда будет испытывать скольжение между вращающимся полем и ротором.Не стесняйтесь посетить нашу статью о типах двигателей переменного тока, чтобы узнать больше.
Двигатели с фазным ротором отличаются тем, как их ротор взаимодействует со статором. Обмотки ротора подключены к вторичной цепи, содержащей контактные кольца, щетки и внешние резисторы, и питаются от отдельного трехфазного переменного тока. При запуске внешнее сопротивление, передаваемое этой вторичной цепи, приводит к тому, что ток ротора снижает силу RMF статора (он работает более «синфазно» с RMF статора).Это означает, что скорость вращения можно контролировать, изменяя сопротивление, когда двигатель достигает 100% скорости, что позволяет операторам выбирать пусковой момент и рабочие характеристики. Это приводит к плавному запуску, высокому начальному крутящему моменту, низкому начальному току и способности регулировать скорость вращения, чего нельзя достичь с помощью более простых конструкций, таких как двигатели с короткозамкнутым ротором (более подробную информацию об этой конструкции можно найти в нашей статье на двигателях с короткозамкнутым ротором).
Технические характеристики двигателя с обмоткой ротора
Спецификации двигателя с фазным ротором включают понимание спецификаций всех асинхронных двигателей, которые можно просмотреть в нашей статье об асинхронных двигателях.В этой статье будут освещены важные концепции двигателей с фазным ротором, которые необходимо понять перед покупкой одного из них, но помните, что это не все.
Пусковой ток
Статор RMF вращается на полной скорости при запуске трехфазного асинхронного двигателя, в то время как ротор изначально находится в состоянии покоя. Ротор испытывает индуцированный ток, когда через него проходит RMF статора, и единственным ограничивающим фактором этого тока является сопротивление обмоток ротора (ток = напряжение / сопротивление).Это приводит к большему току в роторе, что увеличивает потребность в токе статора и, следовательно, вызывает «бросок» пускового тока в двигатель. Этот ток может быть в два-семь раз выше номинального тока, указанного на паспортной табличке, и может вызвать серьезные проблемы при высоком напряжении. Когда двигатель достигает своей номинальной скорости, ротор генерирует «обратную ЭДС» в статоре, которая снижает ток статора до номинального уровня. Пусковой ток – это то, что минимизируется в двигателях с фазным ротором за счет увеличения сопротивления обмоток ротора (I = V / R, где R увеличивается), и почему они имеют такие плавные пусковые характеристики.
Крутящий момент двигателя и кривая крутящего момента-скорости
Самая важная спецификация двигателей с фазным ротором – это то, как они работают при включении, и это визуализируется с помощью графиков крутящего момента-скорости. Асинхронные двигатели могут значительно превышать как их номинальный крутящий момент, так и ток, когда они не работают на 100% скорости; Кривые крутящего момента / скорости отображают это переходное поведение, а на Рисунке 1 показана общая кривая крутящего момента / скорости для асинхронных двигателей с обозначенными важными точками.
Рисунок 1: Кривая крутящий момент-скорость для асинхронных двигателей.
Пусковой крутящий момент – это крутящий момент, возникающий при начальном броске тока, который всегда превышает номинальный крутящий момент. Вытягивающий момент – это максимальный крутящий момент, достигнутый до установившегося режима, а номинальный крутящий момент – это то, что обеспечивается, когда двигатель работает на 100% скорости. Эта связанная скорость не совсем равна синхронной скорости RMF, и это скольжение показано на рисунке 1.
Двигатели, в которых используются популярные конструкции с короткозамкнутым ротором, имеют ограниченный контроль над кривыми крутящего момента и скорости (подробнее см. В нашей статье о двигателях с короткозамкнутым ротором).Стержни ротора с короткозамкнутым ротором закорочены; это приводит к невозможности изменить сопротивление ротора, а это означает, что единственный способ повлиять на скорость вращения – это изменить напряжение (I = V / R, где R является постоянным). Это может вызвать проблемы в больших двигателях, где необходимый входной ток может стать опасно высоким. Двигатели с фазным ротором решают эту проблему, изменяя сопротивление ротора с помощью вторичной цепи, присоединенной к блоку сопротивления переменной мощности и контактным кольцам. За счет увеличения сопротивления в роторе через контактные кольца, тяговый момент может быть достигнут на гораздо более низких скоростях, что обеспечивает более высокий начальный крутящий момент и более низкий пусковой ток.При достижении синхронной скорости сопротивление ротора также может быть закорочено, в результате чего двигатель с фазным ротором ведет себя так, как будто это двигатель с короткозамкнутым ротором. На рис. 2 показано влияние увеличения сопротивления ротора на выходной крутящий момент.
Рис. 2. Как изменение сопротивления ротора влияет на пусковой и отрывной крутящий момент.
Из этого графика видно, что двигатель с фазным ротором обеспечивает управление током, крутящим моментом и скоростью намного лучше, чем другие конструкции. Изменяя сопротивление, этим двигателям потребуется меньший начальный пусковой ток для компенсации, они будут иметь более сильный пусковой крутящий момент и могут максимизировать свой пусковой крутящий момент, также сделав его крутящим моментом отрыва (пример кривой R2 на рисунке 2).Такой подход приводит к созданию двигателя с регулируемой скоростью, высоким пусковым моментом и низким пусковым током, с возможностью изменять эти характеристики по желанию оператора.
Заявки и критерии выбора
Двигатели с фазным ротором могут справиться с тем, что другие асинхронные двигатели не могут, а именно с регулированием скорости, тока и крутящего момента. Способность увеличивать сопротивление ротора при запуске двигателя позволяет плавно разгонять тяжелые нагрузки до номинальной скорости. Когда необходимо минимизировать пусковой ток или имеется ограничение пускового тока ниже, чем могут выдержать двигатели с короткозамкнутым ротором / синхронные двигатели, рассмотрите возможность использования двигателя с фазным ротором.
У двигателей с фазным ротором есть недостатки, и они являются следствием их сложной конструкции. Вторичный контур создает больше возможностей для ошибки, а щетки с контактным кольцом могут представлять угрозу безопасности, если не проверять их регулярно (изношенные щетки могут вызвать искрение и увеличить риск возгорания). Эти двигатели также дороги в обслуживании, что увеличивает их и без того дорогостоящую цену. Их сложность также снижает общий КПД двигателя, и двигатель с короткозамкнутым ротором следует выбирать, если эффективность является основной проблемой или конструктивным ограничением.
Хотя двигатель с фазным ротором и его регулируемые характеристики крутящего момента и скорости вращения являются дорогими и менее эффективными, они отлично подходят для управления большими шаровыми мельницами, большими прессами, насосами с регулируемой скоростью, кранами, подъемниками и другими высокоинерционными нагрузками. Они также отлично подходят для любого приложения, которому нужен плавный запуск и возможность изменять скорость. Они охватывают основы, недоступные для других асинхронных двигателей, и неоценимы для разработчиков, которым необходим абсолютный контроль над скоростью и крутящим моментом.
Сводка
В этой статье представлено понимание того, что такое двигатели с фазным ротором, как они работают и каковы их основные характеристики, определяющие, когда они должны быть указаны по сравнению со стандартными асинхронными двигателями.Для получения дополнительной информации о сопутствующих продуктах обратитесь к другим нашим руководствам или посетите платформу Thomas Supplier Discovery Platform, чтобы найти потенциальные источники поставок или просмотреть подробную информацию о конкретных продуктах.
Источники:
- https://geosci.uchicago.edu
- http://hyperphysics.phy-astr.gsu.edu/hbase/mintage/indmot.html
- http://www.egr.unlv.edu/~eebag/Induction%20Motors.pdf
- https://oaktrust.library.tamu.edu/bitstream/handle/1969.1/163595/T17123-130.pdf? последовательность = 1 & isAllowed = y
- http://www.animations.physics.unsw.edu.au/jw/electricmotors.html
- https://scholar.cu.edu.eg
Прочие изделия для двигателей
Больше от Machinery, Tools & Supplies
Обнаружение отказа ротора асинхронных двигателей по току статора на основе передовых подходов к обработке сигналов
Moussa MA, Boucherma M, Khezzar A (2017) Метод обнаружения неисправности шины асинхронного двигателя с использованием явления утечки боковых лепестков скользящего DFT.IEEE Trans Power Electr 32 (7): 5560–5572. https://doi.org/10.1109/tpel.2016.2605821
Статья Google ученый
Dehina W, Boumehraz M, Kratz F (2018) Диагностика неисправностей ротора и статора с помощью быстрого преобразования Фурье и дискретного импульса в индукционной машине . В: Труды CISTEM’18: 3-й международной конференции по электрическим наукам и технологиям в Магрибе (CISTEM’18), стр. 1–6. IEEE. https: // doi.org / 10.1109 / CISTEM.2018.8613311
Khelif MA, Bendiabdellah A, Cherif BDE (2019) Комбинированный подход к среднеквадратичным значениям RMS-MEAN для обнаружения неисправности обрыва цепи инвертора. Период Политех Электр Eng Comput Sci. https://doi.org/10.3311/ppee.13605
Статья Google ученый
Puche-Panadero R, Pineda-Sanchez M, Riera-Guasp M, Roger-Folch J, Hurtado-Perez E, Perez-Cruz J (2009) Улучшенное разрешение метода MCSA с помощью преобразования Гильберта.Позволяет диагностировать асимметрию ротора при очень низком скольжении. IEEE Trans Energy Convers 24 (1): 52–59. https://doi.org/10.1109/TEC.2008.2003207
Статья Google ученый
Pires JVF, Martins JF, Pires AJ, Rodrigues L (2016) Обнаружение неисправности обрыва шины асинхронного двигателя на основе MCSA, MSCSA и PCA: сравнительное исследование. В: Материалы 10-й международной конференции CPE-POWERENG по совместимости, силовой электронике и энергетике (CPE-POWERENG), стр. 298–303.IEEE. https://doi.org/10.1109/cpe.2016.7544203
Rajalakshmi Samaga BL, Vittal KP (2012) Комплексное исследование диагностики неисправностей со смешанным эксцентриситетом в асинхронных двигателях с использованием сигнатурного анализа. Int J Electric Power Energy Syst 35 (1): 180–185. https://doi.org/10.1016/j.ijepes.2011.10.011
Статья Google ученый
Yang T, Pen H, Wang Z, Chang CS (2016) Обнаружение неисправностей асинхронных двигателей на основе знаний на основе анализа данных по току статора.IEEE Trans Instrum Meas 65: 549–558. https://doi.org/10.1109/tim.2015.2498978
Статья Google ученый
Menacer A, Kechida R, Champenois G, Tnani S (2011) Применение преобразования Фурье и вейвлета для обнаружения неисправностей в асинхронных двигателях при пуске электромагнитного момента. В: 8-й симпозиум IEEE по диагностике электрических машин, силовой электроники и приводов, стр. 664–668. https://doi.org/10.1109/demped.2011.6063695
Kim YH, Youn YW, Hwang DH, Sun JH, Kang DS (2013) Метод оценки параметров с высоким разрешением для выявления неисправностей излома стержня ротора в асинхронных двигателях. IEEE Trans Ind Electr 60 (9): 4103–4117. https://doi.org/10.1109/tie.2012.2227912
Статья Google ученый
Гарсия-Перес А., Ромеро-Тронкосо Р.Дж., Кабал-Йепес Э., Осорнио-Риос Р.А. (2011) Применение спектрального анализа высокого разрешения для выявления множественных комбинированных неисправностей в асинхронных двигателях.IEEE Trans Industr Electron 58 (5): 2002–2010. https://doi.org/10.1109/tie.2010.2051398
Статья Google ученый
Kia SH, Henao H, Capolino GA (2007) Метод оценки частоты с высоким разрешением для обнаружения неисправностей трехфазных индукционных машин. IEEE Trans Industr Electron 54 (4): 2305–2314. https://doi.org/10.1109/tie.2007.899826
Статья Google ученый
Коэн Л. (1989) Частотно-временные распределения – обзор. Proc IEEE 77: 941–981
Статья Google ученый
Эльбоучихи Э., Чокез В., Бенбузид М.Э. (2015) Обнаружение неисправностей индукционных машин с использованием параметрической спектральной оценки тока статора. Сигнальный процесс Mech Syst 52–53: 447–464. https://doi.org/10.1016/j.ymssp.2014.06.015
Статья Google ученый
Elbouchikhi E, Choqueuse V, Benbouzid M (2016) Обнаружение неисправностей подшипников индукционных машин на основе многомерного алгоритма MUSIC и оценки максимального правдоподобия. ISA Trans 63: 413–424. https://doi.org/10.1016/j.isatra.2016.03.007
Статья Google ученый
ЭльБучихи Э. Х., Чокез В., Бенбузид М., Шарпантье Дж. Ф. (2012) Улучшение обнаружения неисправностей в индукционных машинах с использованием спектра высокого разрешения тока статора.В: Труды IECON: 38-я ежегодная конференция общества промышленной электроники IEEE, Монреаль, Канада, стр. 3913–3918. IEEE. https://doi.org/10.1109/iecon.2012.6389267
Оппенгейм А.В., Шафер Р.В., Йодер TM (1999) Обработка сигналов в дискретном времени. Прентис-Холл, Энглвудские скалы
Google ученый
Cupertino F, Vanna, L. Salvatore, Stasi S (2003) Методы анализа для обнаружения сломанных стержней ротора IM после отключения питания.В: Proceedings of the IAS: 38-е ежегодное собрание IAS, посвященное отчету о конференции по отраслевым приложениям, стр. 1360–1367, IEEE. https://doi.org/10.1109/ias.2003.1257728
Romero-Troncoso RJ, Morinigo-Sotelo D, Duque-Perez O, Osornio-Rios, RA, Ibarra-Manzano, MA, Garcia-Perez A (2014) Обнаружение поломки стержня ротора в асинхронных двигателях с питанием от VSD при запуске с помощью спектрального анализа с высоким разрешением. В: Труды ICEM: международная конференция по электрическим машинам (ICEM), стр. 1848–1854.IEEE. https://doi.org/10.1109/icelmach.2014.6960435
Cusido J, Romeral L, Ortega JA, Rosero JA, Garc-aGarcia Espinosa A (2008) Обнаружение неисправностей в индукционных машинах с использованием спектральной плотности мощности в вейвлет разложение. IEEE Trans Industr Electron 55 (2): 633–643. https://doi.org/10.1109/tie.2007.911960
Статья Google ученый
Фландрин П. (1999) Частотно-временной анализ. Academic, Сан-Диего
MATH Google ученый
Echeikh H, Trabelsi R, Mimouni MF, Iqbal A, Alammari R (2014) Высокоэффективное управление обратным ходом пятифазного асинхронного двигателя. В: Материалы 23-го международного симпозиума ISIE по промышленной электронике, стр. 812–817. https://doi.org/10.1109/isie.2014.6864716
Wang X, Chen Y, Lu Y, Li X, He W (2019) Адаптивное управление обратным шагом на основе метода динамической поверхности для синхронного двигателя с постоянными магнитами по идентификации параметров. Proc IMechE Часть I J Syst Control Eng 233: 1172–1181.https://doi.org/10.1177/0959651818819237
Статья Google ученый
Huang N, Shen Z, Long SR, Wu MC, Shih HH, Zheng Q, Liu HH (1998) Разложение эмпирических мод и спектр Гильберта для нелинейного и нестационарного анализа временных рядов. Proc R Soc A Math Phys Eng Sci 454 (1971): 903–995. https://doi.org/10.1098/rspa.1998.0193
MathSciNet Статья МАТЕМАТИКА Google ученый
Риллинг Г., Фландрин П., Гонсалвес П. (1999) Об эмпирической модовой декомпозиции и ее алгоритмах. В: Материалы семинара IEEE / EURASIP по нелинейной обработке сигналов и изображений, Grado , Antalya . IEEE
Loutridis SG (2004) Обнаружение повреждений в зубчатых передачах с использованием разложения по эмпирическим модам. Eng Struct 26 (12): 1833–1841. https://doi.org/10.1016/j.engstruct.2004.07.007
Статья Google ученый
Могтадери А., Фландрин П., Боргнат П. (2013) Фильтрация тенденций с помощью разложения эмпирических мод. Sci Прямые вычисления, статистические данные Anal Elsevier Sci 58: 114–126. https://doi.org/10.1016/j.csda.2011.05.015
MathSciNet Статья МАТЕМАТИКА Google ученый
Карагианнис А., Константину П.А. (2011) Модель прогнозирования количества функций внутреннего режима в биомедицинских сигналах: случай электрокардиограммы. Управление процессами биомедицинских сигналов 6 (3): 231–243.https://doi.org/10.1016/j.bspc.2011.02.005
Статья Google ученый
Cexus J. Анализируйте нестационарные сигналы по преобразованию Хуанга. Opérateur de Teager-Kaiser, et Transformation de Huang-Teager (THT). Кандидатская диссертация, Реннский университет 1, 2005 г.
Бахир С., Тнани С., Тригассу Дж. К., Шампенуа Г. (2006) Диагностика путем оценки параметров неисправностей статора и ротора, возникающих в асинхронных машинах.IEEE Trans Industr Electron 53 (3): 963–973. https://doi.org/10.1109/tie.2006.874258
Статья Google ученый
Дехина В., Бумехраз М., Кратц Ф. (2020) Обнаружение и оценка гармонических составляющих в отказе ротора асинхронных двигателей в режиме онлайн с помощью модифицированного метода Прони. Int Trans Electr Energy Syst 31 (2): 1–16
Google ученый
Gyftakis KN, Antonino-Daviu JA, Garcia-Hernandez R, McCulloch M, Howey DA, Cardoso AJM (2015) Сравнительное экспериментальное исследование возможности обнаружения неисправности сломанной шины в асинхронных двигателях.В кн .: Материалы 10-го международного симпозиума СДЕМПЕД по диагностике электрических машин. Силовая электроника и приводы (СДЕМПЕД), стр.
