
Что такое гироскоп в смартфоне и зачем он нужен?
Множеством интересных функций и датчиков оснащены смартфоны и другие мобильные устройства. Одним из ведущих модулей является гиродатчик или гироскоп. Диковинная новинка в девайсе, выполненная на основе микроэлектромеханической системы, сделала большой рывок в усовершенствование функционала и завоевала большую симпатию среди пользователей. Происхождение слова «гироскоп» имеет давнюю историю. Оно расшифровывается как словосочетание «круг» и «смотрю».
Родоначальником древнегреческого изречения был французский физик Леон Фуко. В XIX веке он занимался исследованием суточного вращения Земли, и этот термин подошёл для нового устройства как нельзя кстати. Гиродатчиками пользуются авиакомпании, судоходство, космонавтика. Компания Apple, производитель современных мобильных телефонов, первой взяла за основу данный функционал и внедрила его в iPhone 4. Несмотря на то, что видео ниже на английском языке, демонстрация технологии от Стив Джобса понятна без перевода.
Теперь, для того чтобы ответить на входящие звонки или полистать страницы электронной книги, достаточно только встряхнуть телефон. За счёт устройства быстро просматриваются фотографии и другие изображения, меняется музыка. Новое приложение у смартфона iPone под названием CoveFlow позволило использовать калькулятор. Теперь легко выполняются такие функции, как деление, умножение, сложение и вычитание. При повороте телефона на 90° данная функция машинально переключается на развёрнутый функционал со множеством сложных математических действий.
Наряду с легкими функциями разработчики внедрили в устройство более сложные программные обеспечения. Например, в некоторых операционных системах при помощи встряхивания телефона запускается обновление для Bluetooth или запускается специфичная программа по измерению углов наклона и уровня. Гироскоп прекрасно учитывает скорость перемещения, и определяет местоположение человека на незнакомой местности.
С технической точки зрения, гироскоп довольно сложное устройство. При его разработке, за основу взяли принцип работы акселерометра, который представляет из себя колбу с пружиной и грузом внутри. На одной стороне пружины закреплен груз, а вторая сторона пружины зафиксирована на демпфере для гашения колебания. При встряхивании (ускорении) измерительного прибора, прикрепленная масса движется и приводит в напряжение пружину.
Такие колебания можно представить в виде данных. Если расположить три таких акселерометра перпендикулярно, то можно получить представление о том, как расположен предмет в пространстве. Поскольку технически расположить такой громоздкий измерительный прибор в смартфоне невозможно, то принцип работы оставили тот же, но груз заменили инертной массой, который расположен в очень маленьком чипе. При ускорении, меняется положение инертной массы и таки образом рассчитывается положение смартфона в пространстве.
С помощью GPS-навигации на дисплее появляется карта, которая фиксирует аналогичное направление объектов при любом повороте тела.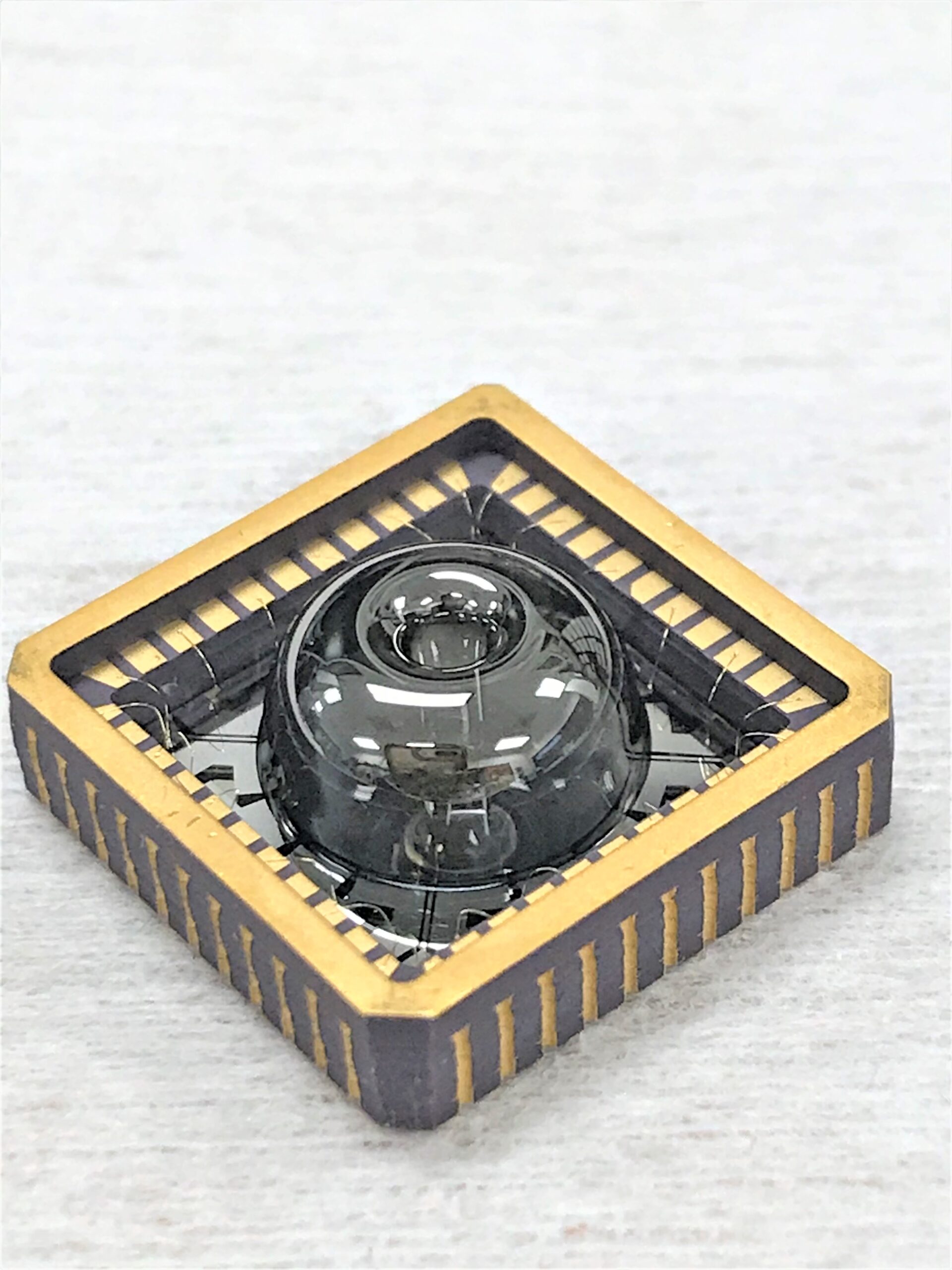 Другими словами, если вы повернулись лицом к реке, то она автоматически отобразится на карте. При развороте на 180 градусов к водоему мгновенно происходят аналогичные изменения на мониторе. С использованием этой функции упрощается ориентировка на местности. Особенно это важно людям, занимающимся активными видами отдыха.
Другими словами, если вы повернулись лицом к реке, то она автоматически отобразится на карте. При развороте на 180 градусов к водоему мгновенно происходят аналогичные изменения на мониторе. С использованием этой функции упрощается ориентировка на местности. Особенно это важно людям, занимающимся активными видами отдыха.
Благодаря точному учёту скорости перемещения управление смартфоном становится более удобным и гармоничным. Зачастую используют гироскопы на Андроид любители компьютерных игр — геймеры. Уникальное устройство в девайсе молниеносно превращает картинки в реальность. Особенно правдоподобными становятся гонки, симуляторы, стрелялки, Pokemon Go.
Достаточно изменить положение смартфона и скорость поворота, то езда на виртуальном автомобиле покажется вам реальной. Герои на дисплее точно направят автомат, нацелят пушку, повернут руль, поднимут в воздух вертолёт, убьют врага. Карманные монстры не будут прыгать по виртуальной траве, а станут двигаться по настоящему миру в видимой области встроенной камеры.
Конечно, это далеко не весь перечень положительных характеристик, присущих Android смартфонам и iPhone. Перечислять приятные и удобные моменты можно бесконечно. Однако не все пользователи оценили универсальные качества по достоинству. Одни предпочли отказаться от гироскопа в новом смартфоне, другие просто отключили его. И этому есть своё объяснение.
- Из недостатков следует выделить установку отдельных приложений, реагирующих с незначительным опозданием на изменения положений в пространстве. Вроде бы сущий пустяк, но наличие этого сенсора доставляет определённые неудобства пользователю смартфона. Особенно заметны недостатки при чтении электронной книги лёжа. Читающий меняет позу, в это же время, связанный с устройством гиродатчик изменяет положение странички. Приходится в срочном порядке перенастраивать её ориентацию.
- Производители смартфонов на своих презентациях в большинстве случаев умалчивают о наличии важного датчика.
 При покупке новой модели присутствие гироскопа можно обнаружить в технических характеристиках гаджета в перечне датчиков. Есть и другие способы, например, установка клиента YouTube, позволяющая быстро установить функционал. Использование приложения AnTuTu Benchmark, Sensor Sense также устанавливает встроенный гиродатчик или его отсутствие.
При покупке новой модели присутствие гироскопа можно обнаружить в технических характеристиках гаджета в перечне датчиков. Есть и другие способы, например, установка клиента YouTube, позволяющая быстро установить функционал. Использование приложения AnTuTu Benchmark, Sensor Sense также устанавливает встроенный гиродатчик или его отсутствие.
Современный элемент смартфона работает на постоянной основе. Это самостоятельный датчик, не требующий калибровки. Его не нужно ни включать, ни отключать. Автоматика сделает эту работу за вас. В случае если устройство отсутствует, то вы не сможете играть в виртуальную реальность. Вам просто придётся купить новый телефон со встроенными функциями.
Если вы нашли ошибку, пожалуйста, выделите фрагмент текста и нажмите Ctrl+Enter.
Читайте также
Поделитесь в соцсетях:
1
0
 Если вокруг Z или X (большинство вращений), то нет, а если вокруг Y, то да. Но вращение вокруг Y можно отследить и компасом (но искусственные поля от приборов могут мешать).
Если вокруг Z или X (большинство вращений), то нет, а если вокруг Y, то да. Но вращение вокруг Y можно отследить и компасом (но искусственные поля от приборов могут мешать).4
0
Для поворота экрана не нужен гироскоп, достаточно акселерометра.
2
0
А сами как думаете?
- 6
0
Здравствуйте, в первую очередь спасибо большое за такую интересную и полезную статью,я узнал очень многое.
 Но вот возник один вопрос, а обычный поворот экрана в телефоне тоже считается результатом работы гиродатчика?
Но вот возник один вопрос, а обычный поворот экрана в телефоне тоже считается результатом работы гиродатчика? 2
0
Гироскоп действительно маленькая, но высокотехнологичная и зачастую незаменимая вещь в смартфоне. Лично мне как охотнику очень помогает в определении пройденного пути, использовании программного компаса, а так же при просмотре карт в различном разрешении.
4
0
Статья не только познавательная,но и с технической точки зрения точно обоснована и аргументирована. Автор детально и при этом доступно раскрывает тему. Большое спасибо.
 org/Comment” itemscope=””>
org/Comment” itemscope=””>3
0
Данная функция в современных реалиях действительно востребована в смартфонах и планшетах. Все мы когда-то чего-то не знали и только лишь немногие продолжают интересоваться и чему-то учиться. Все поправимо. Удачи!
2
0Познавательная статья! Пользуюсь каждый день телефоном, а как он устроен по сути и не знаю. Привыкла, что если функция поворота экрана включена, то она работает. Современные геймеры наверно уже не представляют своей жизни, без этого гиродатчика, ведь они бы не смогли бы играть в того же самого Покемон ГО.
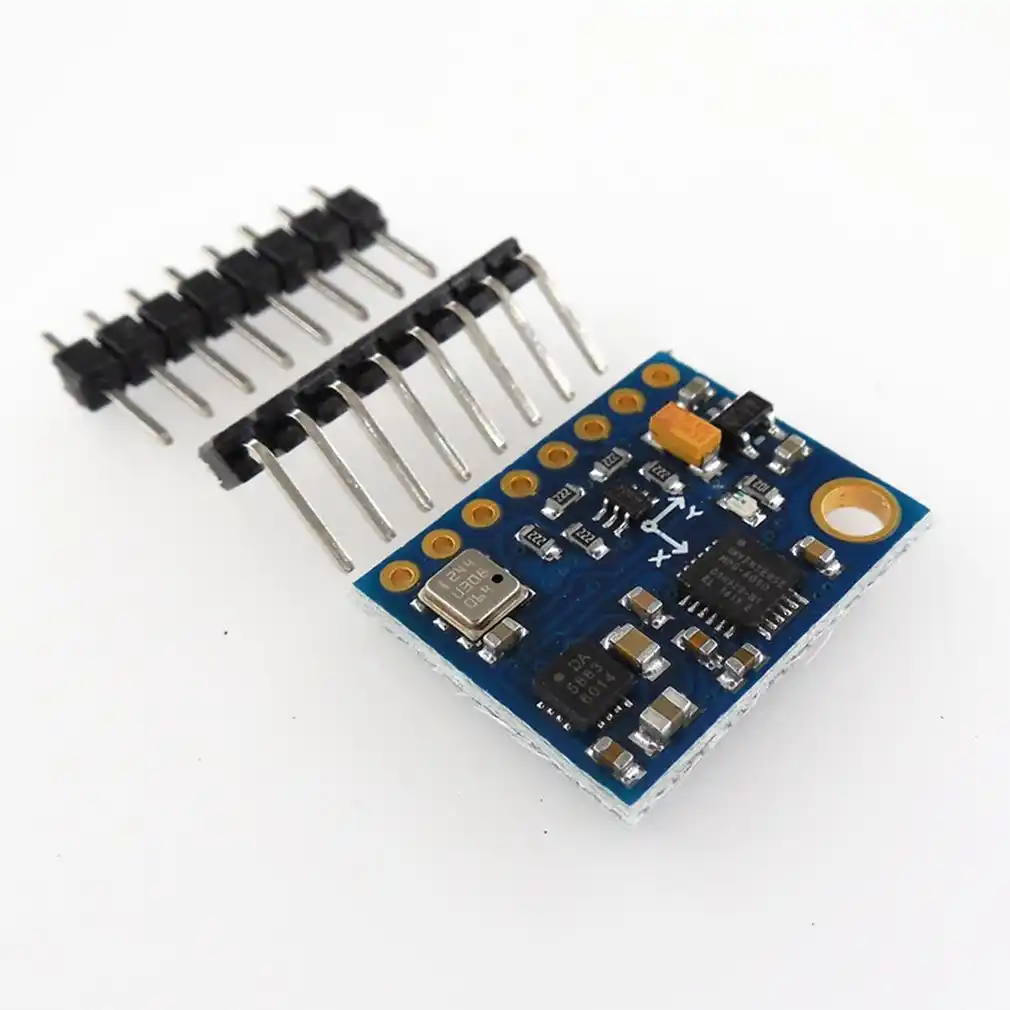
Трехосевой гироскоп + трехосевой акселерометр + магнитометр + датчик давления GY-80
Компактный модуль, объединяющий в себе сразу 4 датчика:
- Датчик атмосферного давления (барометр) BMP085
- Магнитометр (компас) HMC5883L
- Гироскоп L3G4200D
- Акселерометр ADXL345
Рабочее напряжение: 3-5V
Протокол: I2C
Размер модуля: 25. 8 * 16.8мм
8 * 16.8мм
Монтажное отверстие: 3мм
Разъемы с шагом 2.54мм
(Внимание! Модуль устарел и снят с производства. Его современным аналогом является HW-290(GY-87))
Ошибка загрузки
Попробовать еще разНаш магазин работает в соответствии с Законом РФ “О защите прав потребителей”.
В соответствие с п. 4 ст. 26.1 ФЗ «О защите прав потребителей» и п. 21 Постановления Правительства РФ «Об утверждении правил продажи товаров дистанционным способом» потребитель (покупатель) имеет право отказаться от товара (в том числе и надлежащего качества) в любое время до его передачи, а после передачи – в течение 7 дней. При этом, обмен товара надлежащего качества возможен только в случае, если:
4 ст. 26.1 ФЗ «О защите прав потребителей» и п. 21 Постановления Правительства РФ «Об утверждении правил продажи товаров дистанционным способом» потребитель (покупатель) имеет право отказаться от товара (в том числе и надлежащего качества) в любое время до его передачи, а после передачи – в течение 7 дней. При этом, обмен товара надлежащего качества возможен только в случае, если:
- товар не включен в перечень товаров надлежащего качества, не подлежащих возврату утвержденный Постановлением Правительства РФ №55 от 19.01.1998 г.
- товар не был в употреблении
- сохранены фабричные ярлыки, гарантийные талоны, техническая документация, комплектующие детали
- сохранена упаковка товара
- в наличии документы, подтверждающие факт и условия покупки указанного товара (Ст. 25 Закона “О защите прав потребителей”).

В случае отказа от товара возврату подлежит уплаченная сумма, за исключением расходов на доставку товара, а также других расходов интернет-магазина, подлежащих компенсации за счет Покупателя (Ст. 26.1 Закона “О защите прав потребителей”).
Возвратом и обменом товара занимается тот филиал, в котором была совершена покупка
Дополнительная информация по возврату
Город доставки
Рассчет стоимости доставки
Что такое гироскоп в смартфоне и как он работает
Сейчас все смартфоны оснащены как минимум одним датчиком, а чаще всего несколькими. Самыми распространенными стали датчики приближения, освещения и движения. Большинство смартфонов оснащены акселерометром, реагирующим на перемещение устройства в двух или максимум в трех плоскостях. Для полноценного взаимодействия с гарнитурой виртуальной реальности нужен гироскоп, который определяет движения в любом направлении.
Самыми распространенными стали датчики приближения, освещения и движения. Большинство смартфонов оснащены акселерометром, реагирующим на перемещение устройства в двух или максимум в трех плоскостях. Для полноценного взаимодействия с гарнитурой виртуальной реальности нужен гироскоп, который определяет движения в любом направлении.
Гироскоп в смартфоне – это микроэлектромеханический преобразователь угловых скоростей в электрический сигнал. Другими словами этот датчик рассчитывает изменение угла наклона относительно оси при повороте устройства.
Гироскоп относится к микроэлектромеханическим системам (МЭМС), которые совмещают в себе механическую и электронную часть. Подобные чипы имеют размеры порядка пары миллиметров или меньше.
Как работает гироскоп
Обычный гироскоп состоит из инерционного предмета, который быстро вращается вокруг своей оси. Тем самым он сохраняет свое направление, а смещение контролируемого объекта измеряется по изменению положения подвесов.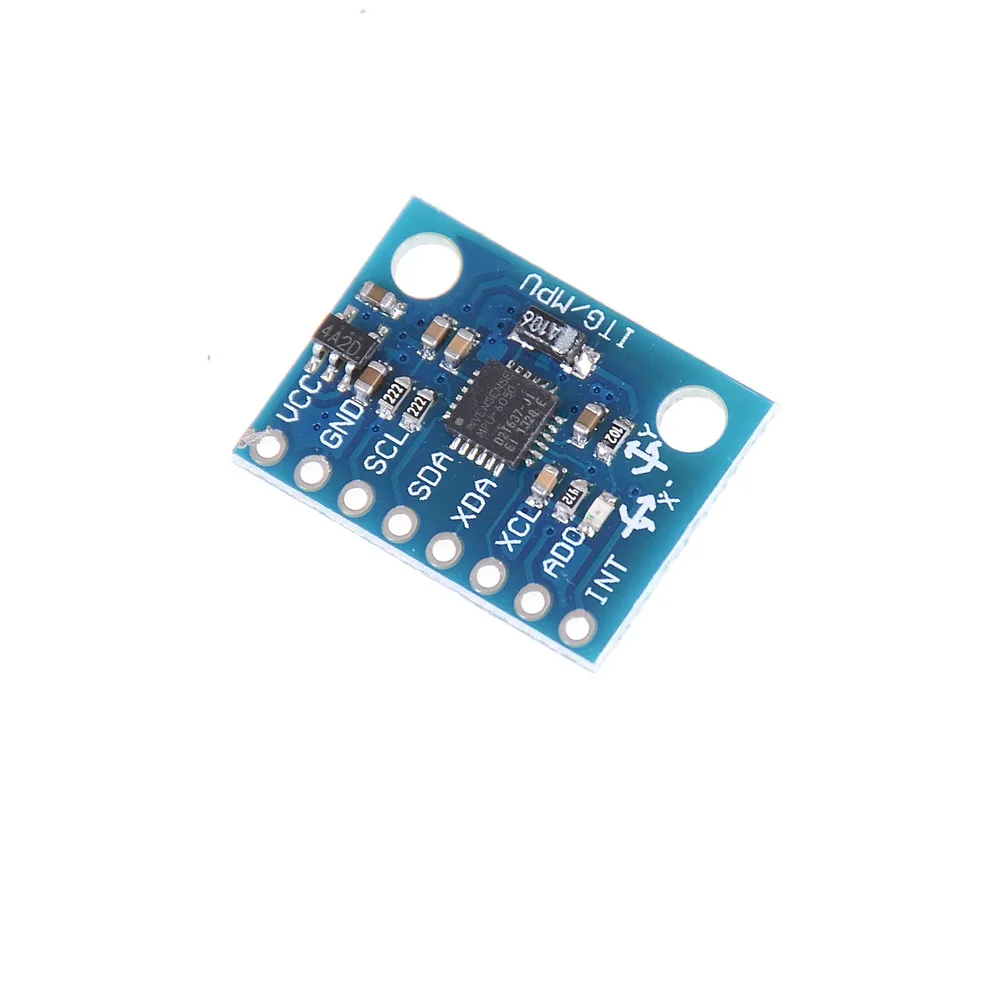 В смартфоны такой волчок явно не поместиться, вместо него используется МЭМС.
В смартфоны такой волчок явно не поместиться, вместо него используется МЭМС.
Преобразование механического движения в электрический сигнал
В самом простом одноосевом гироскопе есть две подвижные массы, двигающиеся в противоположных направлениях (на картинке изображены синим цветом). Как только прикладывается внешняя угловая скорость, на массу действует сила Кориолиса, которая направлена перпендикулярно их движению (отмечена оранжевым цветом).
Под действием силы Кориолиса происходит смещение масс на величину пропорциональную прикладываемой скорости. Изменение положения масс меняет расстояние между подвижными электродами (роторами) и неподвижными (статорами), что приводит к изменению емкости конденсатора и соответственно напряжения на его обкладках, а это уже электрический сигнал. Вот такие множественные сигналы и распознаются гироскопом MEMS, определяя направление и скорость движения.
Вычисление ориентации смартфона
Микроконтроллер получает сведения о напряжении и преобразует их в угловую скорость в данный момент. Величину угловой скорости можно определять с заданной точностью, например до 0,001 градусов в секунду. Чтобы определить насколько градусов вокруг оси повернули устройство, необходимо мгновенную скорость умножить на время между двумя показаниями датчика. Если использовать трехосевой гироскоп, то получим данные о поворотах относительно всех трех осей, то есть таким образом определить ориентацию смартфона в пространстве.
Величину угловой скорости можно определять с заданной точностью, например до 0,001 градусов в секунду. Чтобы определить насколько градусов вокруг оси повернули устройство, необходимо мгновенную скорость умножить на время между двумя показаниями датчика. Если использовать трехосевой гироскоп, то получим данные о поворотах относительно всех трех осей, то есть таким образом определить ориентацию смартфона в пространстве.
Здесь стоит отметить, что для получения значений углов, необходимо интегрировать первоначальные уравнения, в которые входят угловые скорости. При каждом интегрировании увеличивается погрешность. Если вычислять положение только при помощи гироскопа, то со временем рассчитываемые значения станут некорректными.
Поэтому в смартфонах для точного определения ориентации в пространстве необходимы данные еще и акселерометра. Этот датчик измеряет линейное ускорение, но не реагирует на повороты. Оба датчика способны полностью описать все виды движения. Основное преимущество гироскопа над акселерометром в том, что он реагирует на движение в любом направлении.
Зачем нужен гироскоп в смартфоне
Повышенное внимание этому датчику оказывается последние пару лет, когда активно начали развиваться игры и приложения виртуальной реальности. Для взаимодействия пользователя с виртуальной реальностью программе необходимо точно определить положение человека в пространстве. Сейчас даже в самых бюджетных смартфонах установлен акселерометр, но его показания сопровождаются шумами, и датчик не реагирует на повороты и движения в горизонтальной плоскости. Следовательно, для полного погружения в виртуальную реальность в смартфоне обязательно должен быть гироскоп и акселерометр.
Как узнать есть ли в смартфоне гироскоп
Обычно в характеристиках смартфона указано, какие в нем есть датчики. Если же вы сомневаетесь в правдивости информации, то помогут специальные программы. Например, Sensor Box for Android показывает информацию о всех встроенных датчиках. Гироскоп в нем обозначен как Gyroscope. Есть и другие способы, которые мы описывали в этой статье.-400x400.jpg)
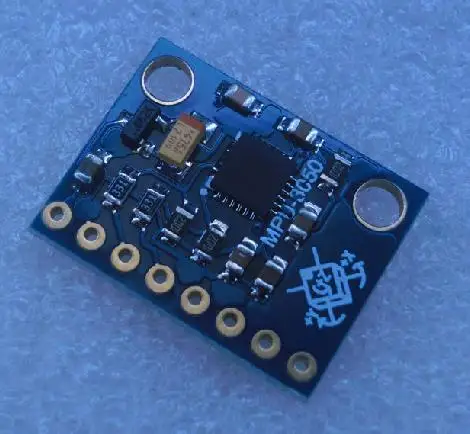
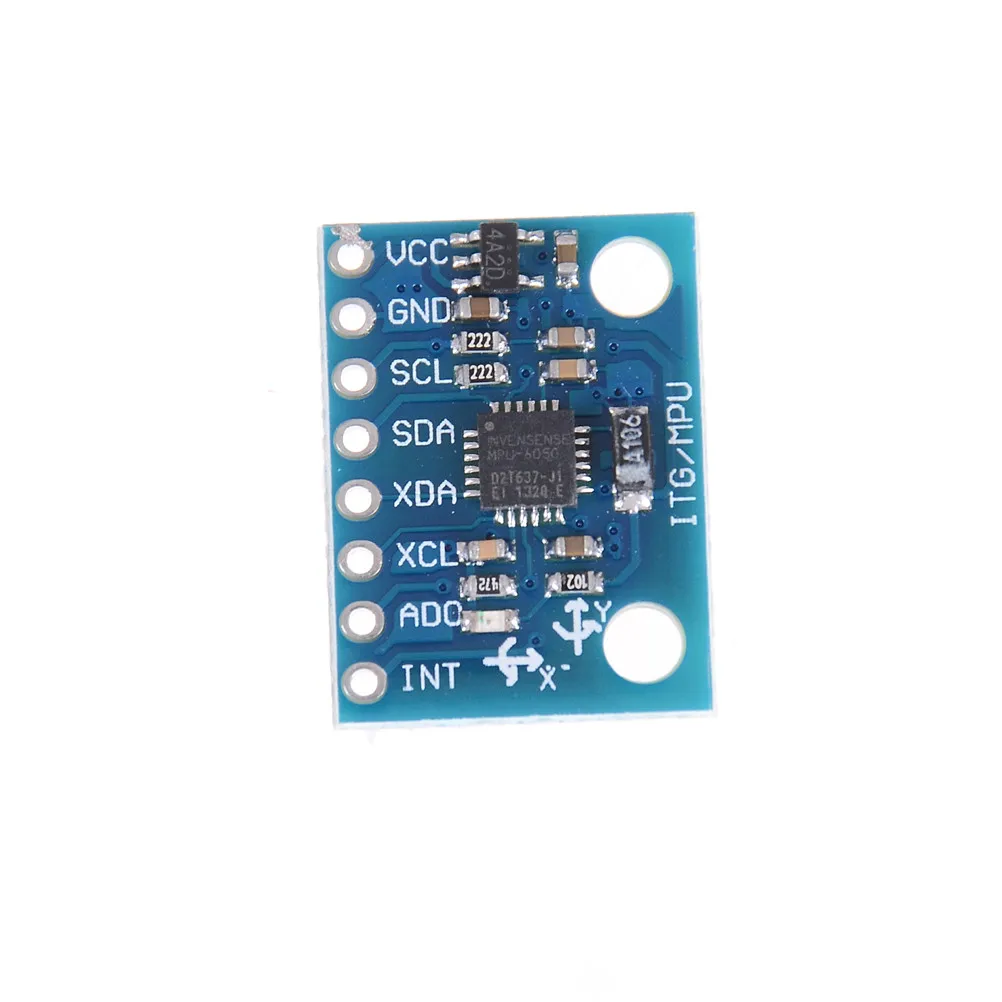
Модуль 3-х осевого гироскопа и акселерометра GY-521 MPU-6050
Напряжение питания 2,3 – 3,6 В. Номинальное 3,3 В. Микросхема MPU-6050 содержит запатентованный компанией InvenSense процессор обработки сигналов, вызванных движением Digital Motion Processor (DMP), способный обрабатывать алгоритмы MotionFusion. DMP может быть использован для сложных расчетов. Собственный процессор может делать расчеты, не отвлекая микроконтроллер и даже способен обрабатывать информацию от другого датчика, подключенного ко второй шине I2C. Специальная программа на языке команд DMP записывается в память каждый раз после подачи питания. Это занимает около секунды. Программа фильтрует показания акселерометра и гироскопа. Данные передаются в буфер FIFO. Некоторые рассуждения об этом здесь.Для точного отслеживания движений предусмотрена возможность записи в память MPU-6050 актуальных пределов измерений. Данные можно считывать из регистров хранения или буфера FIFO размером 1024 байт. Микросхема MPU-6050 может работать в режиме мастер на шине I2C для контактов XDA и XCL.
 Содержит АЦП 16 бит. Есть регистр под названием Who am I (как меня зовут) хранящий адрес модуля GY-521 на шине I2C. Значение в регистре 104 десятичное или 68 шестнадцатеричное. Есть выход для прерываний МК, который настраивается под интересующее событие. Микросхема MPU-6050 содержит более 100 регистров.
Содержит АЦП 16 бит. Есть регистр под названием Who am I (как меня зовут) хранящий адрес модуля GY-521 на шине I2C. Значение в регистре 104 десятичное или 68 шестнадцатеричное. Есть выход для прерываний МК, который настраивается под интересующее событие. Микросхема MPU-6050 содержит более 100 регистров.Адрес микросхемы может быть двух значений (без бита чтения / записи) в зависимости от состояния вывода AD0 модуля 3-х осевого гироскопа и акселерометра GY-521 MPU-6050.
68 (шестнадцатиричное), если AD0 соединен с общим проводом.
69 (шестнадцатиричное), если AD0 соединен с потенциалом лог. 1.
Акселерометр микросхемы MPU-6050 использует пьезоэлектрический эффект. Представьте кубический ящик, имеющий внутри маленький шарик. Стенки этой коробки выполнены из пьезоэлектрических кристаллов. Когда вы наклоните коробку, шар будет двигаться в направлении наклона. Стена, с которой шар сталкивается, создает крошечные пьезоэлектрические токи. В зависимости от тока, получаемого от стен, определяется направление наклона и его величина.
Гироскоп представляет собой колеблющуюся пьезоэлектрическую пластину. При повороте пластина искривляется и ее электрические параметры меняются. Это регистрирует микросхема. Подробнее на видео.
Разработчики микросхемы MPU-6050 предоставляют инструменты, необходимые для создания приложений.
Схема модуля GY-521
Питание модуля GY-521 поступает на вход стабилизатора напряжения Q2 микросхема MIC5205-3.3BM5 с выходным напряжением 3,3 В. На стабилизаторе происходит небольшое падение напряжения 0,3 – 0,4 В, поэтому напряжение питания модуля должно быть выше 3,3 В. Индикатор питания модуля 3-х осевого гироскопа и акселерометра GY-521 MPU-6050 – светодиод D1. Величина резисторов R4 и R5 может отличаться от указанных на схеме.
Назначение контактов
VCC – напряжение питания
GND – общий провод
SCL – тактовый сигнал I2C
SDA – данные I2C
XDA – данные шины I2C при работе в режиме мастера
XCL – тактовый сигнал шины I2C при работе в режиме мастера
AD0 – бит 0 адреса I2C
INT – выход сигнала о готовности данных для использования как внешнего прерывания МК
Подключение модуля 3-х осевого гироскопа и акселерометра GY-521 MPU-6050 к Arduino UNO.

5 V Arduino – VCC
GND Arduino – GND
A4 Arduino – SDA
A5 Arduino – SCL
GND Arduino – AD0
В зависимости от программы – INT
Подводные камни, рифы и турбулентность
При изучении работы микросхемы MPU-6050 гироскопа следует помнить, что механические гироскопы стабилизируются в пространстве за счет своих физических свойств. Электронный гироскоп так работать не может. Он лишь измеряет скорость вращения.
Каждый модуль GY-521 требует калибровки. Показания датчиков имеют некоторое смещение относительно нуля, что вносит погрешность в измерения. Нужно учесть это смещение для каждой оси гироскопа и каждой оси акселерометра, внести корректировку в программу. При производстве микросхем невозможно получить абсолютную точность угла между осями датчиков, поэтому угол между ними содержит погрешность. Также нельзя забывать о том, что данные от трех осей могут иметь разную пропорциональность.
Наибольшая точность результатов математических преобразований для получения параметров движения будет получена при синхронном считывании данных акселерометра и гироскопа.
При построении управляемой машины следует избегать в механизмах источников колебаний и их гармоник с частотой резонанса указанной в характеристиках.
При первом ознакомлении с модулем проверяют его работу на шине данных I2C. Для этого используют программу I2C сканер.
Внутреннее АЦП микросхемы очень чувствительно, его разрядность 16 бит. При такой чувствительности предъявляются повышенные требования к питанию модуля, несмотря на собственный стабилизатор. Здесь не подходит источник питания класса ”какой есть” на 5 В. Прежде всего надо разобраться с параметром используемого блока питания величина пульсаций или уровень шумов с помощью осциллографа. Величина шума в линии питания не должна превышать 50 мВ. Применение батарей в этих условия уместно, но это дорого. Установка конденсаторов не снизит шумы некачественного блока питания.
 Если блок питания шумит от него надо отказаться, заменить или собрать другой. В тоже время установка конденсаторов на линиях питания возле модуля GY-521 снизит влияние мощных электромагнитных помех. Рекомендуется провода питания перевить в витую пару. Нельзя использовать блок питания один и тот же для модуля и для питания двигателей. При калибровке модуль 3-х осевого гироскопа и акселерометра GY-521 MPU-6050 должен иметь собственный источник, отдельный от модуля МК и других потребителей. Если на этапе первого запуска еще можно смириться с повышенным шумом в питании, то на этапе калибровки это приведет к ошибкам, а о высокой точности измерений без качественного питания говорить не приходится.
Если блок питания шумит от него надо отказаться, заменить или собрать другой. В тоже время установка конденсаторов на линиях питания возле модуля GY-521 снизит влияние мощных электромагнитных помех. Рекомендуется провода питания перевить в витую пару. Нельзя использовать блок питания один и тот же для модуля и для питания двигателей. При калибровке модуль 3-х осевого гироскопа и акселерометра GY-521 MPU-6050 должен иметь собственный источник, отдельный от модуля МК и других потребителей. Если на этапе первого запуска еще можно смириться с повышенным шумом в питании, то на этапе калибровки это приведет к ошибкам, а о высокой точности измерений без качественного питания говорить не приходится.Программирование на ардуино и математика
Один из способов использования модуля GY-521 – применение микроконтроллерного модуля Arduino. Программное обеспечение Arduino позволяет установить библиотеки для GY-521. Есть сложная библиотека I2Cdevlib для доступа к MPU-6050 и другим устройствам на шине I2C.

Она устанавливается в папку MPU6050. Использует аппаратный буфер микросхемы и возможности цифровой обработки параметров движения MPU-6050 для выполнения преобразования данных между различными системами координат и объединяет данные от нескольких датчиков. Еще одна полезная библиотека FreeIMU, ориентированная на инерциальный измерительный блок из нескольких датчиков и может выполнять сложную обработку данных. FreeIMU использует I2Cdevlib, но последняя версия I2Cdevlib в комплекте с FreeIMU вызывает конфликт версий. Перед использованием следует убедиться в правильном выборе версии I2Cdevlib.
В конце этого раздела приведены ссылки на адаптированные программы. При работе программ будут получены примерно следующие числа, но их нужно преобразовать в значимые данные.
MPU-6050
Read accel, temp and gyro, error = 0
accel x,y,z: -123, -180, 14547
temperature: 27.235 degrees Celsius
gyro x,y,z : -6, -20, 52,
MPU-6050
Read accel, temp and gyro, error = 0
accel x,y,z: -195, -203, 14510
temperature: 27.
 128 degrees Celsius
128 degrees Celsius gyro x,y,z : -15, 14, 72,
MPU-6050
Read accel, temp and gyro, error = 0
accel x,y,z: -232, -268, 14490
temperature: 27.190 degrees Celsius
gyro x,y,z : -4, -7, 45,
MPU-6050
Read accel, temp and gyro, error = 0
accel x,y,z: -189, -170, 14632
temperature: 27.199 degrees Celsius
gyro x,y,z : -4, -7, 50,
…
В начале программы должна происходить калибровка по первым 10 данным для получения постоянных погрешностей (смещений) от датчиков. Смещения вычитаем из необработанных значений датчика до преобразования данных в углы.
Для вычисления ориентации акселерометром, мы опираемся на тот факт, что происходит постоянное гравитационное притяжение 1 g. Если нет дополнительных сил, действующих на акселерометр, то обнаруженная величина ускорения будет 1 g.
Согласно описанию MPU-6050 с. 13 (Sensitivity Scale Factor), сырые данные акселерометра программой преобразуются в ускорение свободного падения g=9,8 м/с^2 путем деления на коэффициент 16384.
 При перемещении и вращении датчика, данные акселерометра сильно колеблются. Если они могут быть очищены от шумов, то акселерометр обеспечит точные результаты.
При перемещении и вращении датчика, данные акселерометра сильно колеблются. Если они могут быть очищены от шумов, то акселерометр обеспечит точные результаты.Для вычисления ориентации, мы должны сначала инициализировать гироскоп с известным значением (возможно, от акселерометра), затем измерять угловую скорость ω через интервалы времени Δt. Тогда ω × Δt = изменение угла. Проблема с этим подходом заключается в том, что мы интегрируем. Многократное суммирование приращения ω × Δt приведет к увеличивающейся со временем ошибке. Это является причиной гироскопического дрейфа.
Деление сырых данных гироскопа на 131 дает угловую скорость в градусах в секунду. 131 – коэффициент чувствительности гироскопа в заданном режиме 250 град/с. Поскольку у него АЦП 16 бит, то модуль максимального необработанного значения равен 32767. Теперь 32767 / 250 = 131 условных единиц на градус в секунду. То есть, если необработанное значение равно 131, то угловая скорость равна 1 градус в секунду.
С помощью этих данных можно получить положение объекта.
 Для этого мгновенное значение угловой скорости умножим на промежуток времени между опросами датчика гироскопа. Например, разрешение 2000 градусов в секунду, время между опросами 0,1 с, значение мгновенной скорости 210, значит 210*0,1=21 – за это время произошел поворот на 21 градус. Далее каждое полученное значение нужно сложить с предыдущим.
Для этого мгновенное значение угловой скорости умножим на промежуток времени между опросами датчика гироскопа. Например, разрешение 2000 градусов в секунду, время между опросами 0,1 с, значение мгновенной скорости 210, значит 210*0,1=21 – за это время произошел поворот на 21 градус. Далее каждое полученное значение нужно сложить с предыдущим.Как объяснено выше данные акселерометра и гироскопа склонны к систематическим ошибкам. Акселерометр обеспечивает получение точных данных в долгосрочной перспективе, но дает сильный шум при рассмотрении за короткий промежуток времени. Гироскоп обеспечивает получение точных данных о изменении ориентации за короткий промежуток времени, но при интеграции данных происходит дрейф.
Решение этих проблем заключается в использовании данных акселерометра и гироскопа вместе таким образом, чтобы ошибки взаимно уничтожались. Стандартный способ объединения – применение фильтра Калмана, который является довольно сложной методикой. Есть более простая аппроксимация для объединения этих двух типов данных – комплементарный фильтр.
 Хорошо объяснено здесь и здесь. Вот формула комбинирования данных обоих датчиков:
Хорошо объяснено здесь и здесь. Вот формула комбинирования данных обоих датчиков:Угол фильтра = α × (Угол от гироскопа) + (1 − α) × (Угол от акселерометра)
α=τ/(τ + Δt)
Угол от гироскопа = (Последний угол измеренный фильтром) + ω×Δt
Δt = время выборки
τ = постоянная времени превышающая интервалы между шумами
Угол фильтра – отфильтрованный, результирующий угол наклона
Рекомендуется время выборки около 0,04 с и постоянная времени около 1 с, что дает α≈0,96.
Величина угла наклона представляет собой сумму интегрированного значения гироскопа и мгновенного значения акселерометра. Главная задача комплементарного фильтра в том, чтобы ликвидировать дрейф нуля гироскопа и ошибки дискретного интегрирования. На каждом шаге интегрирования (шаге цикла управления машиной) корректируется интеграл угла наклона с помощью показаний акселерометра. Сила этой коррекции определяется коэффициентом фильтра α. Выбор коэффициента α зависит от величины дрейфа нуля гироскопа, от скорости накопления ошибок вычисления и от условий использования машины.
 Так, слишком малое значение α приведет к тому, что на результат работы фильтра будет влиять вибрация корпуса. Как правило, коэффициент комплементарного фильтра подбирается вручную для каждого случая.
Так, слишком малое значение α приведет к тому, что на результат работы фильтра будет влиять вибрация корпуса. Как правило, коэффициент комплементарного фильтра подбирается вручную для каждого случая.Программное обеспечение модуля 3-х осевого гироскопа и акселерометра GY-521 MPU-6050 для ардуино:
GY_521_send_serial
ShowGY521Data
Англоязычная версия этого раздела, а продолжение разговора здесь.
Современное применение акселерометра и гироскопа:
Микросхема MPU-6050
Описание
Страница производителя 1
Страница производителя 2
О регистрах
описание
on-line
Домашняя страница MPU-6050 Accelerometer + Gyro
объемная
короткая
Вики
Программа Krodal
MT Microsystems: MSI310 – датчики для решения динамических задач в навигации и стабилизации.

8 Июля 2019
MSI310 – это миниатюрный инерциальный измерительный прибор, изготовленный по технологии МЭМС (микро-электро-механическая система), содержащий трехосевой гироскоп и трехосевой акселерометр, предназначен для определения координат, углов ориентации и параметров движения подвижных объектов широкого класса.
Выходной сигнал каждого датчика в MSI310 обрабатывается, что оптимизирует динамические характеристики. Заводская калибровка таких параметров как чувствительность, смещение, выравнивание и линейное ускорение обеспечивает высокие точностные характеристики модуля.
MSI310 представляет собой простой и экономически эффективный метод для интеграции многоосного инерциального измерения в аэрокосмические или железнодорожные системы. Структура последовательного периферийного интерфейса (SPI) – универсальный способ для сбора данных и управления конфигурацией.
Габаритные размеры MSI310 составляют всего 22,4 мм × 22,4 мм × 9 мм.
Основные характеристики MSI310:
|
|
Параметры |
MSI310 |
|
Канал гироскопа |
Диапазон измерений |
±250 °/с (возможны диапазоны измерения от ±100 °/с до ±5000 °/с) |
|
Стабильность дрейфа нуля (1σ) |
≤25 °/ч |
|
|
Повторяемость дрейфа нуля |
≤25 °/ч |
|
|
Нестабильность нуля (по дисперсии Аллана) |
≤3 °/ч |
|
|
Случайное блуждание нуля |
≤0,3 °/Öч |
|
|
Нелинейность масштабного коэффициента |
≤200 ppm |
|
|
Повторяемость масштабного коэффициента |
≤200 ppm |
|
|
Несоосность (СКО) |
≤1 мрад |
|
|
Полоса пропускания (-3 дБ) |
≥100 Гц |
|
|
Канал акселерометра |
Диапазон измерений |
±30 g (возможны варианты от ±2g до ±30 g) |
|
Стабильность смещения нуля (1σ) |
≤1 мg |
|
|
Долговременная стабильность смещения нуля (1 год) |
≤1,5 мg |
|
|
Повторяемость смещения нуля |
≤1 мg |
|
|
Нестабильность смещения нуля (по дисперсии Аллана) |
≤0,4 мg |
|
|
Нелинейность масштабного коэффициента |
≤1000 ppm |
|
|
Повторяемость масштабного коэффициента |
≤1000 ppm |
|
|
Несоосность (СКО) |
≤1 мрад |
|
|
Полоса пропускания (-3 дБ) |
≥100 Гц |
|
|
Характеристики системы |
Вес |
≤30 г |
|
Размер |
27,4 мм * 22,4 мм * 9 мм |
|
|
Напряжение питания |
5 ± 0,5 В |
|
|
Потребляемая мощность |
≤0,5 Вт |
|
|
Интерфейс |
RS422 |
|
|
Скорость передачи данных |
≥100 Гц |
|
|
Уровень вибрации |
10 g rms (10 Гц – 2000 Гц) |
|
|
Ударостойкость |
5000 g |
|
|
Диапазон рабочих температур |
-45 °С … 85 °С |
|
|
Температура хранения |
-55 °С … 105 °С |
Все параметры характерны для условий +25 °С, +5,2 В постоянного тока, если не указано иное.
Применение
-
Интегрированные навигационные системы и инерциальные системы управления полетом
-
Системы контроля и управления полетом
-
Гирокурсовертикали (AHRS)
-
Стабилизация антенн, камер и платформ
МЭМС инерциальные устройства и системы
- Базируются на технологии МЭМС (микро-электро-механическая система)
-
Цифровые гироскопы и акселерометры
-
Встроенный высокоскоростной процессор
-
Компенсация и калибровка
-
Энергоэкономичные, миниатюрные
-
Устойчивы к воздействиям вибраций и ударами
Электроника НТБ – научно-технический журнал – Электроника НТБ
Принцип действияРассмотрим основополагающий принцип действия МЭМС-гироскопов. Практически все они — вибрационные гироскопы. Это означает, что в каждом из них есть рабочее тело, которое, в простейшем случае, совершает возвратно-поступательное движение в одной плоскости. Если поставить это тело на вращающуюся платформу, плоскость которой совпадает с плоскостью колебаний, то на колеблющуюся массу начнет действовать сила Кориолиса Fс = 2m[Ω × v], где Ω — вектор угловой скорости (перпендикулярен плоскости вращения), v —
Практически все они — вибрационные гироскопы. Это означает, что в каждом из них есть рабочее тело, которое, в простейшем случае, совершает возвратно-поступательное движение в одной плоскости. Если поставить это тело на вращающуюся платформу, плоскость которой совпадает с плоскостью колебаний, то на колеблющуюся массу начнет действовать сила Кориолиса Fс = 2m[Ω × v], где Ω — вектор угловой скорости (перпендикулярен плоскости вращения), v —
вектор линейной скорости тела относительно вращающейся платформы, m — масса тела. Модуль Fс = 2mΩv ⋅ sin ϕ, где ϕ — угол между векторами линейной и угловой скорости. Следовательно, сила Кориолиса направлена перпендикулярно направлению колебаний (рис.1) и оси вращения. При противоположных направлениях движения сила Кориолиса также действует в противоположных направлениях. На этом и основан принцип вибрационного гироскопа.
Определив силу Кориолиса и зная линейную скорость тела, несложно вычислить угловую скорость и ее изменение (угловое ускорение). Задача упрощается, если линейная скорость колебаний v изменяется по синусоидальному закону v = v0sin wt. Тогда определение ускорения Кориолиса сводится к детектированию сигнала Ω, модулирующего несущую с частотой w: аc = 2v0Ω sin wt. Данная задач давно и успешно решается в радиотехнике, в частности, с помощью квадратурных модуляторов/демодуляторов.
Задача упрощается, если линейная скорость колебаний v изменяется по синусоидальному закону v = v0sin wt. Тогда определение ускорения Кориолиса сводится к детектированию сигнала Ω, модулирующего несущую с частотой w: аc = 2v0Ω sin wt. Данная задач давно и успешно решается в радиотехнике, в частности, с помощью квадратурных модуляторов/демодуляторов.
Балочные гироскопы
Все конструкции вибрационных гироскопов, при широком их разнообразии, можно свести к нескольким типам. Одними из самых первых были балочные гироскопы. Их принцип действия таков: консольную балку (пластину) заставляют колебаться с помощью пьезоэлементов в направлении оси Х
(рис.2). Под действием силы Кориолиса при вращении относительно оси Z, параллельной продольной оси балки, возбуждаются колебания вдоль оси Y. Они регистрируются другими пьезоэлементами.
Конструкции балок могут быть самыми разными. Например, в гироскопах ОАО «Элпа» БВГ-3 и БВГ-4 используется трехполюсный вибратор — стальная балка с поперечным сечением в виде равностороннего треугольника [1].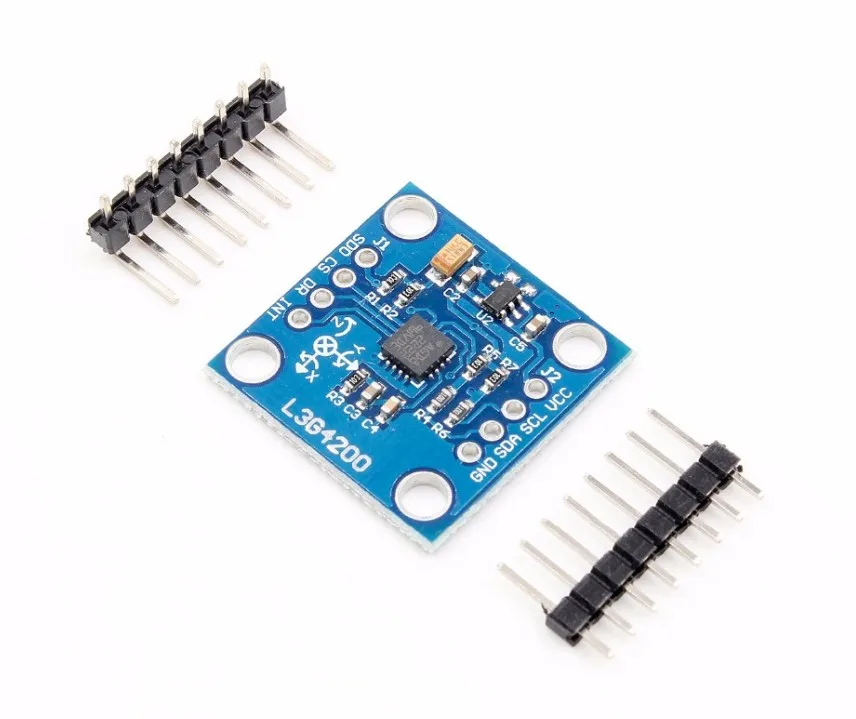 К каждой грани балки приклеено по пьезоэлементу: на нижней стороне – возбуждающий вибрацию, на боковых гранях – измерительные. Основной недостаток таких гироскопов — их низкая технологичность (сложно обеспечить стабильные параметры клеевого соединения металла и пьезокермики и т.п.). Поэтому во всем мире распространение получили так называемые биморфные вибрационные гироскопы.
К каждой грани балки приклеено по пьезоэлементу: на нижней стороне – возбуждающий вибрацию, на боковых гранях – измерительные. Основной недостаток таких гироскопов — их низкая технологичность (сложно обеспечить стабильные параметры клеевого соединения металла и пьезокермики и т.п.). Поэтому во всем мире распространение получили так называемые биморфные вибрационные гироскопы.
В биморфных гироскопах резонатор представляет собой две склеенные пьезоэлектрические пластины, поляризованные в противоположных направлениях. К пластинам (или к одной из них) прикладывают напряжение, одна пластина начинает сжиматься, другая растягиваться, в результате возникают колебания. При вращении под действием силы Кориолиса возбуждаются вторичные колебания, которые можно детектировать теми же электродами. По данному принципу построен, в частности, вибрационный гироскоп БВГ-500 (“Элпа”).
Отметим, что конструкция резонатора может быть гораздо сложнее описанной. Так, один из лидеров (и зачинателей) промышленного освоения вибрационных пьезоэлектрических гироскопов — компания Murata — запатентовала структуру (приоритет от 28 октября 2002 года) [2], в которой резонатор представляет собой пару колеблющихся в противофазе пластин (рис.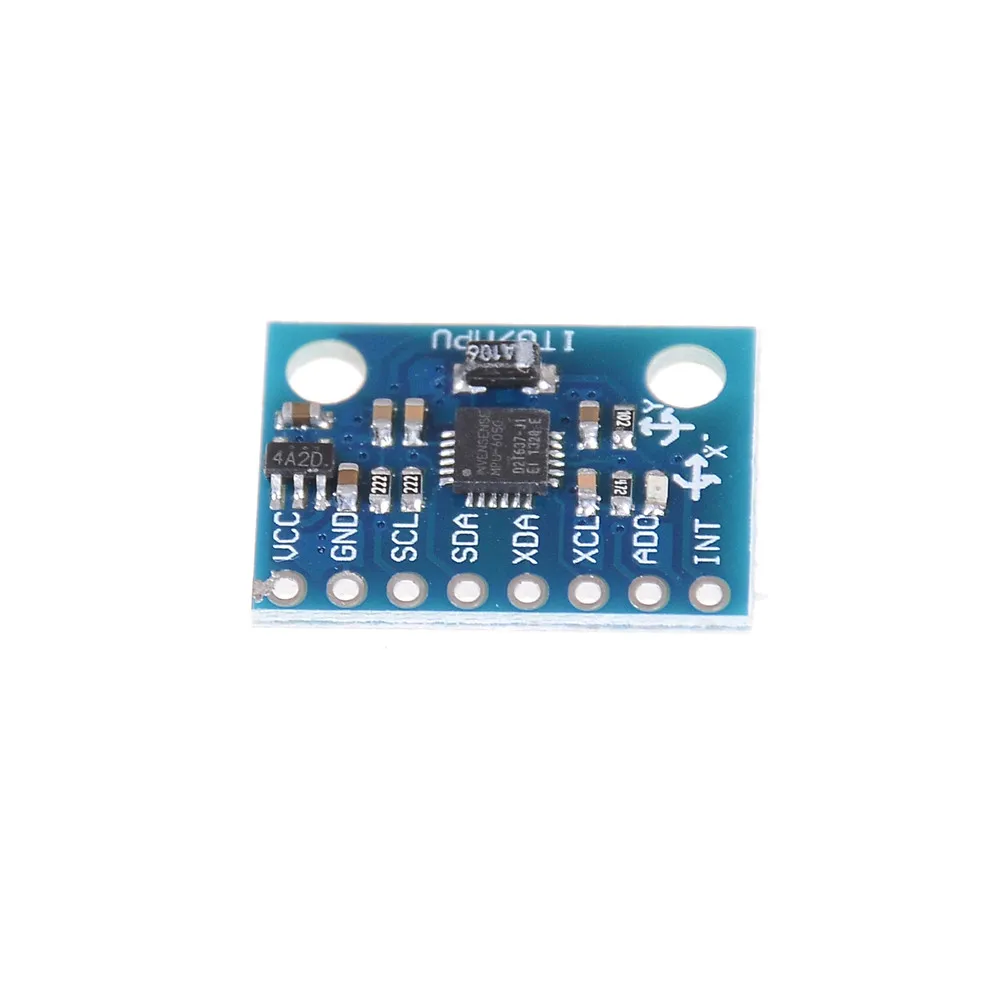 3). Пластины либо биморфные, либо наклеенные на металлическое основание униморфные. Каждая из пластин состоит из трех частей с противоположными направлениями поляризации. При вращении относительно оси Z возникают вторичные колебания (вдоль длины пластин). Хотя первичные колебания пластин происходят в противофазе, сигналы их генерации синфазны. Вторичные же колебания, обусловленные силой Кориолиса, вызывают дополнительные противофазные сигналы на электродах, разность которых пропорциональна угловой скорости вращения.
3). Пластины либо биморфные, либо наклеенные на металлическое основание униморфные. Каждая из пластин состоит из трех частей с противоположными направлениями поляризации. При вращении относительно оси Z возникают вторичные колебания (вдоль длины пластин). Хотя первичные колебания пластин происходят в противофазе, сигналы их генерации синфазны. Вторичные же колебания, обусловленные силой Кориолиса, вызывают дополнительные противофазные сигналы на электродах, разность которых пропорциональна угловой скорости вращения.
Таким образом, с помощью дифференциальной схемы можно детектировать эти сигналы. При этом используются те же электроды, что и для генерации первичных колебаний.
Компания Murata известна на рынке биморфыми пьезоэлектрическими гироскопами ENV-05. Недавно на смену им пришли более совершенные ENC-03R. Это миниатюрное устройство (8×4×2 мм) весом 0,2 г обладает впечатляющими характеристиками (cм. таблицу). Схема включения устройства также проста (рис.4).
Основной недостаток пьезокерамических вибрационных гироскопов — температурная нестабильность параметров, обусловленная свойствами пьезокерамики. Компенсировать его попытались — и не без успеха — специалисты компании Epson, создавшие совместно с компанией NGK Insulators новый пьезоэлектрический гироскоп XV-3500CB. Его отличает, помимо оригинальной конструкции (рис.5), использование кварца в качестве пьезоэлемента. В результате в диапазоне измерений ±100°/с удалось достичь приемлемой температурной стабильности — 5% (см. таблицу) при миниатюрном корпусе (5×3,2×1,3 мм).
Компенсировать его попытались — и не без успеха — специалисты компании Epson, создавшие совместно с компанией NGK Insulators новый пьезоэлектрический гироскоп XV-3500CB. Его отличает, помимо оригинальной конструкции (рис.5), использование кварца в качестве пьезоэлемента. В результате в диапазоне измерений ±100°/с удалось достичь приемлемой температурной стабильности — 5% (см. таблицу) при миниатюрном корпусе (5×3,2×1,3 мм).
Гироскопы-камертоны
Одна из важнейших конструкций резонатора гироскопа — в форме камертона, tuning fork (TF). Принцип действия такого датчика (рис.6) прост: колеблющиеся в одной плоскости в противофазе массы при вращении вокруг вертикальной оси начинают совершать колебания в перпендикулярной плоскости. Возможно, первым МЭМС-гироскопом, использующим этот принцип, стал гироскоп [3], созданный в компании Charles Stark Draper Laboratory (www.draper.com) — бывшей лаборатории Драпера Массачусетского технологического института. Он был создан еще в 1993 году [4, 5]. Базовая патентованная конструкция TF-гироскопа представляет собой рамку с двумя осцилляторами, колеблющимися в противофазе (навстречу друг другу) вдоль оси Х (рис.7). Колебания генерируются путем подачи напряжения на гребенчатые приводы. При этом под действием электростатической силы рабочие тела осцилляторов подталкиваются друг к другу. Возвратное движение происходит за счет микропружин. При вращении вокруг оси Y рамка колеблется в вертикальной плоскости (перпендикулярной подложке МЭМС): один осциллятор будет подниматься, другой — опускаться и наоборот. На верхнюю часть рамки и на подложку нанесены тестовые электроды. При колебаниях в вертикальной плоскости емкость между ними начнет изменяться, что можно детектировать и определить угловую скорость вращения.
Базовая патентованная конструкция TF-гироскопа представляет собой рамку с двумя осцилляторами, колеблющимися в противофазе (навстречу друг другу) вдоль оси Х (рис.7). Колебания генерируются путем подачи напряжения на гребенчатые приводы. При этом под действием электростатической силы рабочие тела осцилляторов подталкиваются друг к другу. Возвратное движение происходит за счет микропружин. При вращении вокруг оси Y рамка колеблется в вертикальной плоскости (перпендикулярной подложке МЭМС): один осциллятор будет подниматься, другой — опускаться и наоборот. На верхнюю часть рамки и на подложку нанесены тестовые электроды. При колебаниях в вертикальной плоскости емкость между ними начнет изменяться, что можно детектировать и определить угловую скорость вращения.
Описанный принцип реализован компанией Fujitsu в серии МЭМС-гироскопов S1BG. Их TF-резонатор выполнен из хорошо известного пьезоэлектрика LiNbO3. Гироскоп работает в диапазоне ±60°С, чувствительность — 25±2,5 мВ/°/с, линейность — 0,5%, напряжение питания — 5 В, ток потребления —
не более 6 мА. Габариты корпуса — 12,4×8,4×12,5 мм, рабочий диапазон температур — -40…+85°С.
Габариты корпуса — 12,4×8,4×12,5 мм, рабочий диапазон температур — -40…+85°С.
Компания Fujitsu анонсировала и гироскоп S1DG, который определяет скорость вращения одновременно по двум осям. Заявленный динамический диапазон — ±300°/с, чувствительность — 0,67±20% мВ/°/с, линейность — 0,5%, напряжение питания — 5 В, ток потребления — 5 мА. Габариты корпуса — 6×8×1,3 мм, рабочий диапазон температур —
-5…+75°С.
В скором времени число серийно производимых гироскопов данного типа пополнят и изделия компании Honeywell — одноосевые гироскопы семейства GG1178 (рис.9). Семейство будет представлено приборами с динамическим диапазоном ±75°/с, ±150°/с и ±300°/с (см. таблицу), корпус — LCC-14 (9,78×9,27×4,57 мм).
Гироскопы Analog Devices по технологии iMEMS
Один из основных недостатков рассмотренных гироскопов — сильная восприимчивость к линейным нагрузкам. Кроме того, технологически сложно массово производить МЭМС с колебаниями в вертикальной плоскости — это противоречит принципу планарной технологии.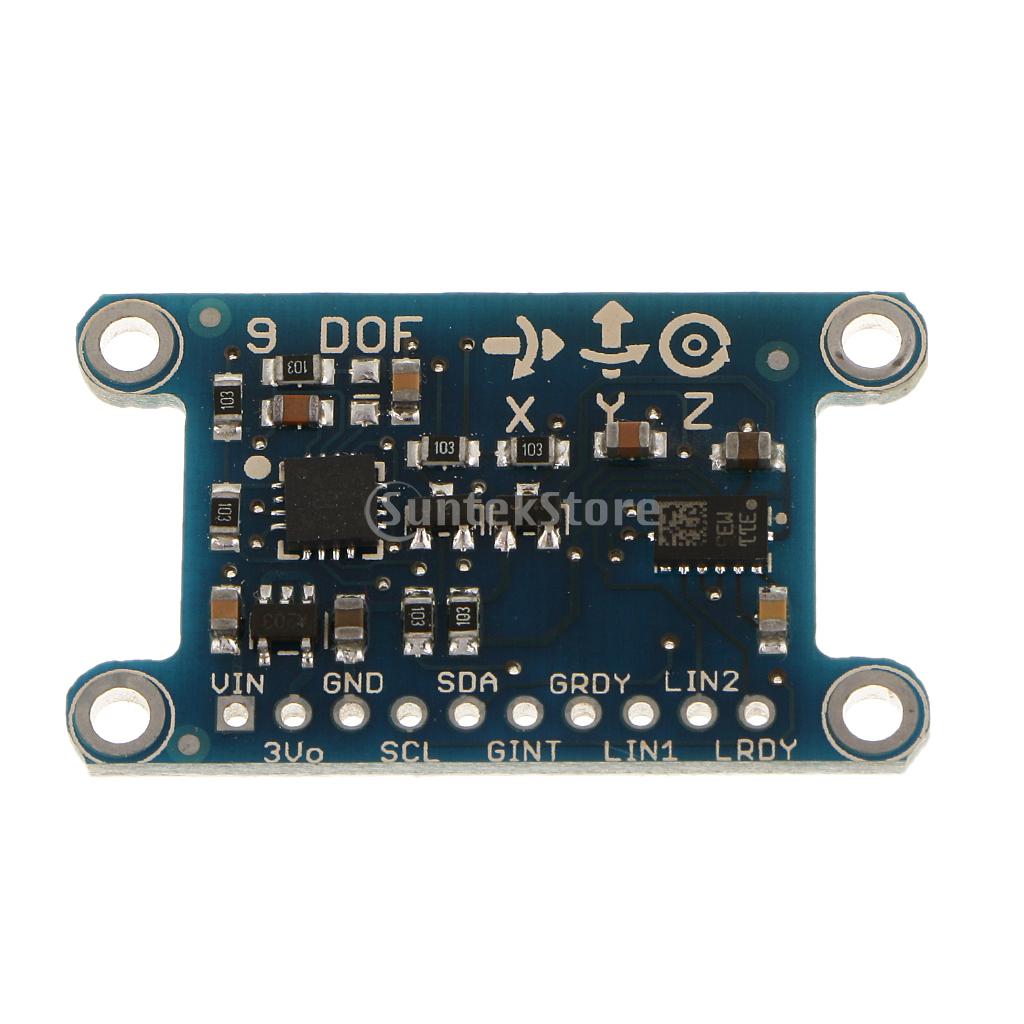 Преодолеть эти проблемы в значительной степени удалось, используя МЭМС-гироскопы, в которых направления колебаний — как первичных, так и вызванных ускорением Кориолиса, — лежат в плоскости подложки. В известной степени такие гироскопы можно рассматривать как вариации гироскопа-камертона. Значительных успехов в данной области достигла компания Analog Devices (www.analog.com), которой удалось создать технологию iMEMS и на ее основе производить гироскопы серий ADXRS и ADIS. Поскольку эта компания — безусловный лидер в промышленном производстве данного класса гироскопов, остановимся на ее продукции подробнее.
Преодолеть эти проблемы в значительной степени удалось, используя МЭМС-гироскопы, в которых направления колебаний — как первичных, так и вызванных ускорением Кориолиса, — лежат в плоскости подложки. В известной степени такие гироскопы можно рассматривать как вариации гироскопа-камертона. Значительных успехов в данной области достигла компания Analog Devices (www.analog.com), которой удалось создать технологию iMEMS и на ее основе производить гироскопы серий ADXRS и ADIS. Поскольку эта компания — безусловный лидер в промышленном производстве данного класса гироскопов, остановимся на ее продукции подробнее.
Основной элемент гироскопа серии ADXRS — это закрепленная на гибких подвесках рамка, внутри которой совершает поступательные колебательные движения некая масса (рис.10) [6]. Для определенности положим, что колебания происходят вдоль оси Х. Подвесы рамки допускают ее колебания только вдоль оси Y. Колебания массы возбуждаются электростатически, с помощью гребенки зубцов (рис.11).
На внешней поверхности рамки и на подложке расположены гребенки контактов, образующих систему плоских конденсаторов.
При колебаниях рамки относительно подложки расстояния между этими зубцами изменяются, соответственно изменяется и емкость. Когда подложка неподвижна (или движется прямолинейно и равномерно), рамка не колеблется. Если же начать вращать такую структуру вокруг оси Z, то под действием силы Кориолиса возникнут вынужденные колебания рамки вдоль оси Y.
Однако остается проблема компенсации линейных ускорений. В приборах серии ADXRS она решена за счет размещения на одной подложке двух одинаковых структур, в которых генерируются строго противофазные колебания (рис.11). Измерительные сигналы, снимаемые с емкостей обоих структур, поступают в дифференциальную схему. При этом сигналы, вызванные колебаниями под воздействием ускорения Кориолиса, будут складываться, а синфазные составляющие, обусловленные линейными ускорениями, — вычитаться.
Отметим, что приведенная конструкция проста только в описании. Элементы этих МЭМС чрезвычайно малы. Амплитуды колебаний зубцов гребенок (обкладок конденсаторов) составляет 16×10-15 м — меньше межатомного расстояния! Изменение емкости такого конденсатора — 12×10-21 Ф [6].
Очевидно, чтобы обработать сигнал с таких емкостей, нужны прецизионные усилители, корреляционные методы обработки и т.п. Вся необходимая электроника интегрирована в ту же СБИС. В результате гироскопы серии ADXRS демонстрируют достаточно высокие результаты (см. таблицу).
Для примера рассмотрим гироскоп ADXRS300 (рис.12). Это миниатюрное устройство (размер корпуса LCPBGA-32 —
7×7×3 мм) обеспечивает работу в диапазоне угловых скоростей ±300°/с (относительно вертикальной оси Z). При этом прибор устойчив к линейным ударным нагрузкам до 2000 g. Влияние линейных ускорений (вдоль любой оси) составляет 0,2°/с/g. Собственная частота резонаторов — 14 кГц. СБИС оснащена схемой самотестирования, встроенным датчиком температуры, встроенным повышающим преобразователем напряжения (на переключаемых конденсаторах) для генерации колебаний резонатора (для этого необходимо напряжение порядка 20 В) и встроенным источником опорного напряжения. Гироскопы рассмотренного семейства — это одноосевые приборы, с линейным аналоговым выходом (напряжение на выходе меняется по линейному закону в зависимости от частоты вращения).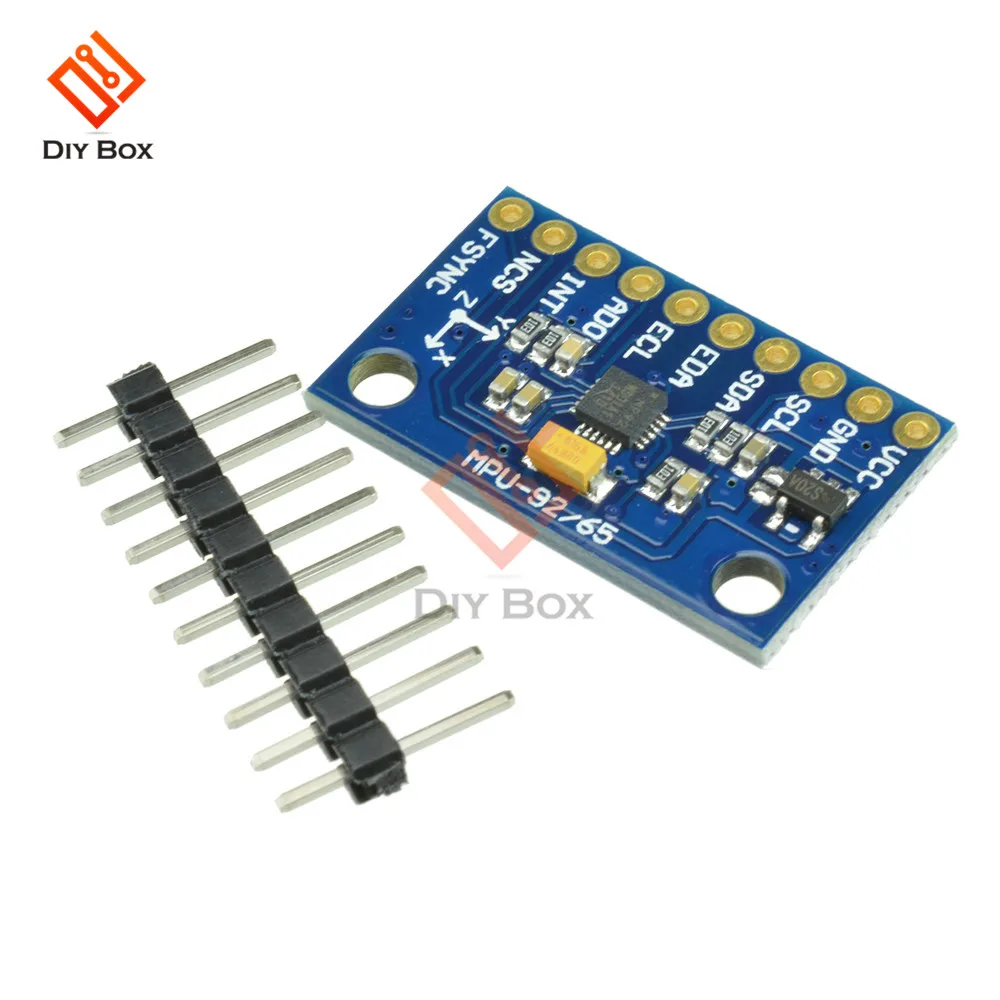
Компания Analog Devices выпускает и семейство гироскопов ADIS. Оно построено на базе серии ADXRS, но с расширенными функциональными возможностями — со встроенными АЦП, средствами термокомпенсации и т.п. Эти гироскопы работают в диапазонах ±80 и ±300°/с, а некоторые обладают возможностью перестройки динамического диапазона в пределах от ±80 до ±320°/с. Характерный пример — гироскоп ADIS16255 (рис.13). Помимо датчика угловой скорости он оснащен основным 14-разряным АЦП для оцифровки сигнала датчика, вспомогательными 12-разрядными ЦАП и АЦП, датчиком температуры с оцифрованным (12 бит) выходом, встроенной системой автотестирования и калибровки, SPI-интерфейсом и т.д. (рис.13). При динамическом диапазоне ±320°/с чувствительность составляет 0,07°/с/LSB (LSB — младший бит оцифрованного сигнала).
Отметим, что недавно компания анонсировала трехосевой гироскоп ADIS16350 (рис.14) — интегрированный модуль, в состав которого, помимо трехосевого гироскопа (±320°С), входит и трехосевой датчик линейных ускорений (акселерометр) с диапазоном измерений ±10 g. Сигналы обоих датчиков оцифровываются АЦП с разрешением 14 разрядов. Модуль оснащен вспомогательными 12-разрядными ЦАП и АЦП. Обмен данными возможен через SPI-интерфейс. Детали конструкции не оглашаются, однако судя по размерам модуля (22,7×23,2×22,9 мм), он представляет собой микросборку.
Сигналы обоих датчиков оцифровываются АЦП с разрешением 14 разрядов. Модуль оснащен вспомогательными 12-разрядными ЦАП и АЦП. Обмен данными возможен через SPI-интерфейс. Детали конструкции не оглашаются, однако судя по размерам модуля (22,7×23,2×22,9 мм), он представляет собой микросборку.
Гироскопы с диском-вибратором
Еще одна разновидность вибрационных гироскопов — устройства с диском-резонатором. Один из первых гироскопов с дисковым резонатором был создан сотрудниками лаборатории твердотельной электроники Мичиганского универститета в 1994 году [7, 8]. Тогда был продемонстрирован прототип гироскопа (рис.15а), представлявшего собой никелевый диск диаметром 1 мм — обод с восемью полукруглыми спицами, жестко закрепленными в центре на поликремниевой подложке. С внешней от обода стороны с небольшим зазором располагаются приводящие, измерительные и корректирующие электроды. Под действием прикладываемого к приводящим электродам напряжения генерируется основная мода колебаний (например, вдоль оси Y) — диск начинает вытягиваться вдоль оси Y и сжиматься вдоль оси Х (рис. 16). Если подложка (а с ней и диск) начинает вращаться вокруг оси Z, сила Кориолиса стремится вызывать колебания в направлении оси X.
16). Если подложка (а с ней и диск) начинает вращаться вокруг оси Z, сила Кориолиса стремится вызывать колебания в направлении оси X.
Возникает вторая (измерительная) мода колебаний — главная ось эллипса смещается на 45°. Амплитуда этих колебаний qsens пропорциональна угловой скорости вращения WZ:
qsens = 4Ag⋅Q/w0⋅qdrive⋅WZ, где Ag ≈ 0,37 — так называемое угловое усиление кольцевой структуры (константа, определяемая геометрией и высокостабильная при изменении температруры), Q — добротность резонатора, w0 — резонансная частота колебаний, qdrive — амплитуда в основной моде (без вращения). Эти амплитуды регистрируют с помощью емкостных датчиков с внешней стороны обода в соответствующих точках.
Данная конструкция обладает рядом существенных особенностей. Прежде всего, благодаря симметричной структуре резонансные частоты в основной и измерительной моде одинаковы. Кроме того, узловые точки обеих мод совпадают. Такой резонатор обладает высокой добротностью, следовательно — потенциально большим разрешением измерения угловой скорости. Он мало восприимчив к ударам и вибрациям. Кроме того, неизбежные производственные дефекты (например, асимметрию) резонатора можно устранить электронным путем, используя специальные подстроечные электроды [8].
Он мало восприимчив к ударам и вибрациям. Кроме того, неизбежные производственные дефекты (например, асимметрию) резонатора можно устранить электронным путем, используя специальные подстроечные электроды [8].
Уже первый образец показал добротность Q ~ 2000 и разрешение 0,5°/с. При динамическом диапазоне ±100°/с прибор демонстрировал нелинейность на уровне 0,2%. Впоследствии (1998 год) была разработана технология создания подобных структур на поликремнии (рис.15б) [9]. Диаметр вибратора составил 1,1 мм при толщине диска 80 мкм (ширина обода и спиц — 4 мкм). Добротность прототипа оказалась на уровне 1200 (в глубоком вакууме). Однако уже в 2002 году разработчики представили МЭМС-гироскоп на монокристалле кремния с ориентацией (111) на стеклянной подложке (рис.15в). При диаметре диска 2,7 мм и толщине 150 мкм добротность резонатора составила 12000. Это обеспечило разрешение 132 мВ/°/с, соответствующую точность 0,002°/с (7,2°/ч) и нелинейность 0,02%. Дрейф нуля находился в пределах 1°/с за 10 часов без термокомпенсации [10].
Сходный принцип применен в гироскопе с резонатором в виде восьмиконечной звезды, образованной суперпозицией двух квадратов (рис.17) [11]. Такая конструкция позволяет использовать для измерений угловой скорости колебательные моды более высоких порядков, а также обеспечивает более точную электронную балансировку резонатора. В результате добротность резонатора из монокристаллического кремния составила 25000 и выше — до 115000.
В серийных приборах дисковый резонатор использован в гироскопах компании Silicon Sensing Systems (www.siliconsensing.com), совместного дочернего предприятия фирм Sumitomo Precision Products Company и British Aerospace Systems and Equipment (сейчас — BAE Systems). Гироскопы этой компании используют описанный принцип, но их отличает не емкостной, а индукционный метод генерации и определения амплитуды вынужденных колебаний [12]. Резонатор находится в постоянном магнитном поле, перпендикулярном плоскости диска. Источник поля — магнит из самария-кобальта, расположенный над вибратором диаметром 6 мм (рис. 18). Чувствительные элементы и приводы представляют собой токовые петли.
18). Чувствительные элементы и приводы представляют собой токовые петли.
Компания предлагает несколько линеек приборов — SRC03, SRC05, GYRO-SiRRS01 (разработан еще компанией BAE Systems) и др. (см. таблицу). В частности, гироскопы серии SRC03 выпускаются в корпусах с габаритами 29×29×18,4 мм.
Все приборы Silicon Sensing Systems высокоустойчивы к ударным и вибрационным воздействиям — они работают при линейных ускорениях свыше 100 g и ударах до 200 g (1 мс). Продукция этой компании в значительной мере ориентирована на специальные применения.
Вращательные вибрационные микрогироскопы
Развивается и направление вращательных дисковых резонаторов. Первые значимые работы в этой области появились в начале 1990-х годов. Они проводились в Центре датчиков и приводов Калифорнийского университета в Беркли [13, 14], а также в лаборатории Драпера (в Кембридже) [15]. Патенты в этой области принадлежат и компании Analog Devices [16].
Суть метода — диск-резонатор крепят на торсионах (как правило, на четырех) и электростатически (например, гребенчатыми приводами, связанными со спицами диска) вызывают крутильные колебания относительно вертикальной оси Z (рис. 19) [13]. Если такой вибрирующий диск вращается вокруг оси, лежащей в его плоскости (например, X), под действием силы Кориолиса возникают колебания перпендикулярно плоскости диска. Один край диска (в нашем случае — вдоль оси Y) начнет подниматься, другой — опускаться в зависимости от текущего направления крутильных колебаний. Если гироскоп вращать одновременно вокруг осей X и Y, возникнут колебания относительно осей Y и X, соответственно. На поверхности диска формируют плоский электрод, на подложке под диском —
19) [13]. Если такой вибрирующий диск вращается вокруг оси, лежащей в его плоскости (например, X), под действием силы Кориолиса возникают колебания перпендикулярно плоскости диска. Один край диска (в нашем случае — вдоль оси Y) начнет подниматься, другой — опускаться в зависимости от текущего направления крутильных колебаний. Если гироскоп вращать одновременно вокруг осей X и Y, возникнут колебания относительно осей Y и X, соответственно. На поверхности диска формируют плоский электрод, на подложке под диском —
четыре секторных электрода (соответственно, по осям X и Y). Измеряя изменение емкости между диском и этими электродами на подложке, можно определить амплитуды вертикальных колебаний и угловые скорости вращения одновременно вокруг двух осей [14].
Существует множество вариаций данного метода. Например, диск закреплен на оси, препятствующей его колебаниям в вертикальной плоскости. Но ось связана с внешней рамкой, которая может совершать вынужденные колебания, которые и детектируются емкостными датчиками [17]. Однако несмотря на более чем десятилетнюю историю, данные конструкции пока не нашли воплощения в серийных изделиях. Видимо, причина в технологических сложностях ее массовой реализации. Тем не менее, были сообщения о применении такой конструкции в МЭМС-гироскопах отечественной компании «Гирооптика»
Однако несмотря на более чем десятилетнюю историю, данные конструкции пока не нашли воплощения в серийных изделиях. Видимо, причина в технологических сложностях ее массовой реализации. Тем не менее, были сообщения о применении такой конструкции в МЭМС-гироскопах отечественной компании «Гирооптика»
(www.gyro.ru). Фирма заявляла о создании датчиков угловых скоростей 7ЧСК(У)-Р и микросборок приборов на их основе. Объявленный диапазон измерений ±360°/с, нестабильность —
не более 0,5%, стойкость к одиночным ударам до 16000 g [18]. Однако информации о серийной продукции этой компании нет.
В заключение отметим еще один перспективный тип конструкции — так называемый гироскоп с распределенной массой [19], созданный в Лаборатории микросистем калифорнийского университета в Ирвине (UCI MicroSystems Laboratory). Возглавляет эту лабораторию выпускник мехмата МГУ 1991 года Андрей Шкел. Предложенная модель представляет собой несколько осцилляторов, колеблющихся с одинаковой фазой и частотой и расположенных симметрично относительно центра связывающего их каркаса (рис. 20). При радиальном направлении вибраций осцилляторов вращение вокруг вертикальной оси гироскопа приведет к возникновению силы Кориолиса, направленной по касательной к каркасу. Эта сила вызывает крутильные колебания, которые регистрируются емкостными датчиками.
20). При радиальном направлении вибраций осцилляторов вращение вокруг вертикальной оси гироскопа приведет к возникновению силы Кориолиса, направленной по касательной к каркасу. Эта сила вызывает крутильные колебания, которые регистрируются емкостными датчиками.
Достоинства данной конструкции обусловлены двумя факторами. Во-первых, колебания осцилляторов происходят одновременно в нескольких осесимметричных направлениях. Кроме того, первичные и вторичные (измерительные) колебания — разных типов, линейные и крутильные. В результате существенно снижается воздействие первичных колебаний на датчики измерительных колебаний. Благодаря этому сигнал, соответствующий нулевой угловой скорости, оказывается высокостабильным. Снижается и уровень шумов. Принцип детектирования кругового смещения позволяет устранять воздействие линейных ускорений. Кроме того, поскольку все вызывающие генерацию силы попарно противоположны и равны по величине, их сумма в точке крепления вибратора к подложке (в центре) практически равна нулю. Поэтому генерируемые колебания не передаются на подложку. Наконец, многоосевая структура минимизирует влияние различных производственных дефектов, внутренних напряжений структуры, анизотропных свойств материала конструкции.
Поэтому генерируемые колебания не передаются на подложку. Наконец, многоосевая структура минимизирует влияние различных производственных дефектов, внутренних напряжений структуры, анизотропных свойств материала конструкции.
Все это позволяет существенно увеличить амплитуду колебаний осцилляторов, а пропорционально ей — и амплитуду измерительных колебаний. В результате существенно возрастают чувствительность гироскопа и ширина его рабочей полосы частот.
Таким образом, при всем разнообразии конструкций МЭМС-гироскопов только пьезогироскопы, а также вибрационные гироскопы компании Analog Devices можно отнести к действительно массовым изделиям. Но все эти устройства при видимой простоте вбирают в себя новейшие технологические
достижения, обсуждение которых осталось за рамками данной
статьи. Отметим, что это еще и достаточно молодое направление, настоящий расцвет которого еще впереди. Залог чему —
чрезвычайно широкий спектр применений, от фото- и видеокамер, компьютерных перчаток-манипуляторов, систем автомобильной электроники до средств навигации самого разного, в том числе и военного, назначения (такие гироскопы уже встраивают в управляемые снаряды). Сейчас МЭМС-датчики планируют производить такие компании, как Freescale, Kionix, Hitachi Metals, Oki Electric и STMicroelectronics. Важно, что определенные успехи на поприще МЭМС-датчиков угловых скоростей достигнуты и российскими компаниями — остается только пожелать им всемерно развивать свои производственные и технологические возможности.
Сейчас МЭМС-датчики планируют производить такие компании, как Freescale, Kionix, Hitachi Metals, Oki Electric и STMicroelectronics. Важно, что определенные успехи на поприще МЭМС-датчиков угловых скоростей достигнуты и российскими компаниями — остается только пожелать им всемерно развивать свои производственные и технологические возможности.
Литература
1. Сафронов А. и др. Малогабаритные пьезоэлектрические вибрационные гироскопы: особенности и области применения. — ЭЛЕКТРОНИКА: НТБ, 2006, №8, с.62–64.
2. European Patent Application EP 1416249 A1, приоритет от 28 октября 2002 года.
3. US Patent 6.862.934 , приоритет от 10 апреля 2003 года.
4. Bernstein, J. et al. A micromachined comb-drive tuning fork rate gyroscope. —
Proc. IEEE Micro Electro Mechanical Systems Workshop (MEMS ’93), Fort Lauderdale, pp. 143-148.
5. M. Weinberg, et al. A Micromechanical Comb Drive Tuning Fork Gyroscope for Commercial Applications, 2nd St. Petersburg International Conference on Gyroscopic Technology and Navigation, St. Petersburg, Russia, May 1995.
Petersburg, Russia, May 1995.
6. Geen J., Krakauer D. New iMEMS Angular-Rate-Sensing Gyroscope. —
Analog Dialogue, 37–03 (2003), www.analog.com.
7. Putty M.W. A micromachined vibrating ring gyroscope. — Ph.D. dissertation, University of Michigan, Ann Arbor, March 1995.
8. Putty M.W. and Najafi K. A Micromachined Vibrating Ring Gyroscope. —
Solid-State Sensors and Actuators Workshop, Hilton Head, SC, June 1994, p. 213–220.
9. Ayazi F., Najafi K. A HARPSS Polysilicon Vibrating Ring Gyroscope. — Journal Of Microelectromechanical Systems, Vol. 10, № 2, June 2001.
10. Guohong He, Khalil Najafi. A Single-Crystal Silicon Vibrating Ring Gyroscope. MEMS 2002: micro electro mechanical systems, Las Vegas NV, 20–24 January 2002.
11. Zaman M.F., Sharma A., Amini B.V., and Ayazi F. The resonating star gyroscope. — Proc. IEEE Micro Electro Mechanical Systems Conference (MEMS’05), Miami, FL, Jan. 2005, p. 355–358.
12. Hopkins I. Performance and Design of a Silicon Micromachined Gyro.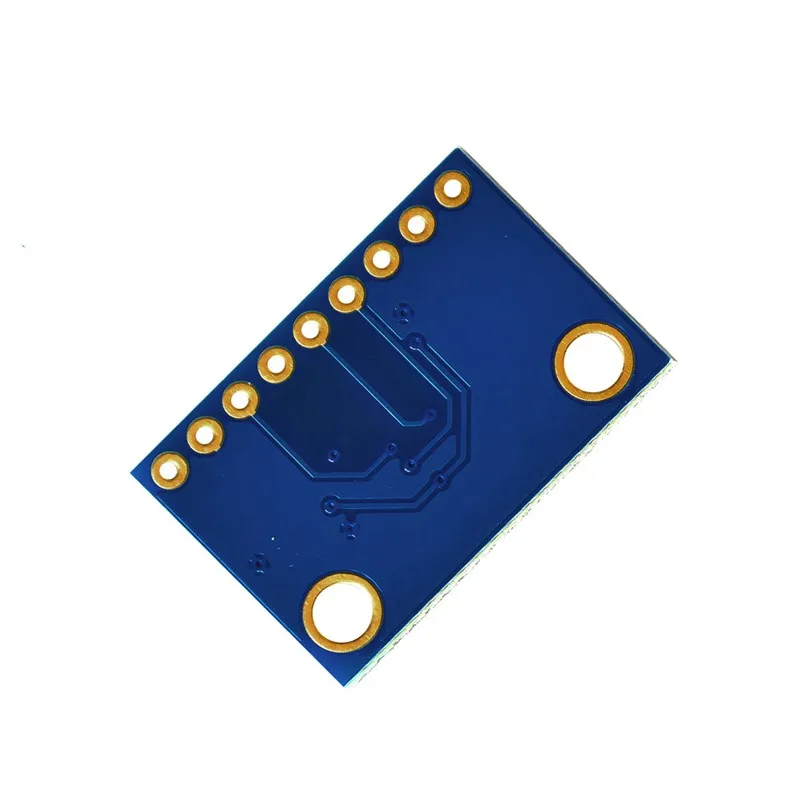 —
—
Silicon Sensing Systems, 2001.
13. Juneau T., Pisano A. P., and Smith J. H. Dual axis operation of a micromachined rate gyroscope. — Proc., IEEE 1997 Int. Conf. on Solid State Sensors and Actuators (Tranducers ’97), Chicago, June 16–19, p. 883–886.
14. US Patent 6,067,858, приоритет от 30 мая 1997 года.
15. US Patent 5535902, приоритет от 22 мая 1995 года.
16. US Patent 5635640, приоритет от 3 июня 1997 года.
17. Горнев Е.С., Зайцев Н.А. и др. Обзор микрогироскопов, сформированных по технологии поверхностной или объемной микромеханики. — Нано- и микросистемная техника, 2002, № 8, с. 2–6.
18. Попова И.В. и др. Микромеханические датчики и системы, практические результаты и перспективы развития. — XII Санкт-Петербургская международная конференция по интегрированным навигационным системам, май, 2005.
19. Cenk Acar and Andrei M. Shkel. An Approach for Increasing Drive-Mode Bandwidth of MEMS Vibratory Gyroscopes. — Journal оf Microelectromechanical Systems, Vol.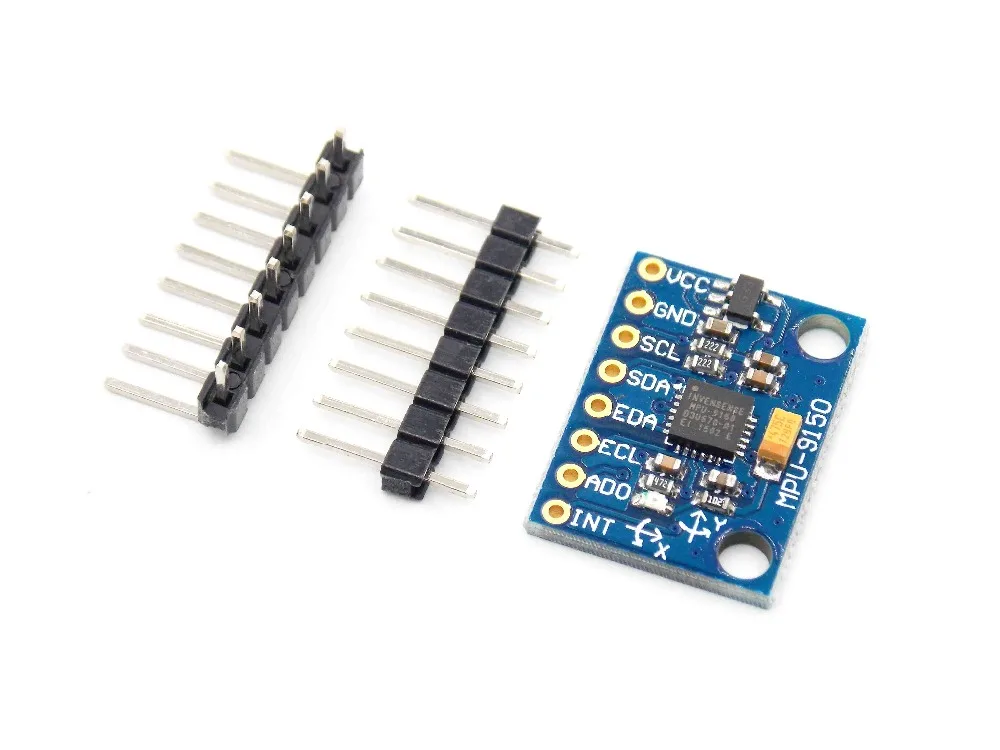 14, №3, June 2005, p.520–528.
14, №3, June 2005, p.520–528.
Что такое гироскоп в телефоне?
Современные мобильные устройства оснащаются большим количеством интересных функций и модулей. Одним из таких является гироскоп, и если совсем недавно устройство было диковинной новинкой в девайсе, то сегодня оно используется повсеместно и удивить наличием такой функции современного пользователя сложно. И хотя часть потребителей находят гироскоп весьма полезным изобретением, некоторые все же предпочитают сразу отключить его. Устройство еще называют гиродатчиком.ЧТО ТАКОЕ ГИРОСКОП
Гироскоп представляет собой устройство, реагирующее на изменения углов ориентации тела, на которое оно устанавливается. В качестве самого элементарного примера можно привести детскую игру – юлу. Прибор был изобретен И. Боненбергером (немецкий математик и астроном) в далеком 1817-м, однако, существует информация о том, что ученый создал свое детище несколько раньше – в 1813-м. Происхождение самого слова древнегреческое и состоит из двух слов: γῦρος – «круг» и σκοπέω – «смотрю».
 Гиродатчик используется во многих серьезных сферах науки и техники – судоходстве, космонавтике, авиации, в производстве техники бытового назначения, игрушек, и, конечно же, мобильных телефонов. В большинстве моделей телефонов Хайскрин гироскоп присутствует.
Гиродатчик используется во многих серьезных сферах науки и техники – судоходстве, космонавтике, авиации, в производстве техники бытового назначения, игрушек, и, конечно же, мобильных телефонов. В большинстве моделей телефонов Хайскрин гироскоп присутствует.НЕ ПУТАТЬ С АКСЕЛЕРОМЕТРОМ
Среди пользователей есть мнение, что гироскоп – это тот же акселерометр, и функции, соответственные. Но это не так – назначение последнего заключается в отслеживании поворотов агрегата в пространстве. Гироскоп же фиксирует перемещения телефона в пространстве, скорость перемещения, определяет стороны света. В целом можно сказать, что функционал у этих двух устройств схож и гиродатчик – это как бы улучшенный акселерометр. Последний отвечает за повороты дисплея, а гироскоп за передвижения в 3-х плоскостях. Актуально наличие гироскопа для использования различных приложений.
ФУНКЦИИ ГИРОСКОПА В СМАРТФОНЕ
Применение гиродатчика в смартфонах открыло абсолютно новые, неизведанные, захватывающие возможности. Современный пользователь сумеет по достоинству оценить функционал этого устройства в своем девайсе. К примеру, элементарным встряхиванием телефона можно отвечать на звонки, просматривать фото, изображения, переворачивать странички в электронной книге, в плеере можно переключить песню. Невероятно удобен гиродатчик в калькуляторе: портретное использование его позволяет выполнять минимальное количество функций – поделить, умножить, сложить, вычесть. Но, как только пользователь повернет телефон на девяносто градусов калькулятор автоматически перейдет в другой режим – на дисплее смартфона появится расширенный функционал с массой дополнительных действий.
Современный пользователь сумеет по достоинству оценить функционал этого устройства в своем девайсе. К примеру, элементарным встряхиванием телефона можно отвечать на звонки, просматривать фото, изображения, переворачивать странички в электронной книге, в плеере можно переключить песню. Невероятно удобен гиродатчик в калькуляторе: портретное использование его позволяет выполнять минимальное количество функций – поделить, умножить, сложить, вычесть. Но, как только пользователь повернет телефон на девяносто градусов калькулятор автоматически перейдет в другой режим – на дисплее смартфона появится расширенный функционал с массой дополнительных действий.Помимо простых функций специалисты нашли для гороскопа применение и в различных видах программного обеспечения. В некоторых операционках встряхивание телефона запускает обновление Bluetooth. Нашлось место для гиродатчика и в работе специфических программ, которые предназначаются для измерения углов наклона и уровня. Очень удобен гироскоп, когда необходимо определить местоположение пользователя на незнакомой местности. При помощи GPS-навигации можно использовать карту, которая при любом повороте человека менять свое направление в ту же сторону, то есть, если пользователь повернут лицом к озеру, это автоматически отобразится на карте, если повернется спиной к водоему – произойдут изменения и на карте. Такой помощник значительно упрощает ориентирование на местности и станет чрезвычайно полезным для людей, увлеченных активными видами отдыха.
При помощи GPS-навигации можно использовать карту, которая при любом повороте человека менять свое направление в ту же сторону, то есть, если пользователь повернут лицом к озеру, это автоматически отобразится на карте, если повернется спиной к водоему – произойдут изменения и на карте. Такой помощник значительно упрощает ориентирование на местности и станет чрезвычайно полезным для людей, увлеченных активными видами отдыха.
К сожалению, не обошлось и без минусов из-за которых некоторые пользователи предпочитают отказаться от использования гироскопа в своем смартфоне и попросту отключить его. К таким недостаткам можно отнести то, что некоторые приложения реагируют на изменения положения в пространстве с небольшим опозданием. В качестве примера можно рассмотреть чтение лежа электронной книги с мобильного устройства: если пользователь при этом будет менять свою позу, то гиродатчик и приложение, связанное с устройством, также будут менять ориентацию странички. Это доставляет определенные неудобства.
КТО И КАК ИСПОЛЬЗУЕТ ГИРОСКОП ЧАЩЕ ВСЕГО
Конечно же это геймеры. Именно они по достоинству оценят наличие гироскопов в смартфонах. Наличие данного устройства в девайсе превращает процесс игры в совершенно иное качество – картинка становится более реалистичной. В основном это гонки, шутеры, симуляторы. В шутерах выстрел необходимо осуществить при помощи нажатия и для того, чтобы навести прицел, необходимо изменить положение телефона, а камера в игрушке повернется вслед за девайсом, в гонках входы в повороты на виртуальном авто настолько реалистичны, что по ощущениям это можно сравнить с ездой на реальном авто.
Магазин мобильных телефонов
Каталог смартфонов Highscreen
– learn.sparkfun.com
Что такое гироскоп
Гироскопы или гироскопы – это устройства, которые измеряют или поддерживают вращательное движение. Гироскопы MEMS (микроэлектромеханические системы) – это небольшие недорогие датчики, измеряющие угловую скорость. Единицы угловой скорости измеряются в градусах в секунду (° / с) или оборотах в секунду (RPS). Угловая скорость – это просто измерение скорости вращения.
Единицы угловой скорости измеряются в градусах в секунду (° / с) или оборотах в секунду (RPS). Угловая скорость – это просто измерение скорости вращения.
, аналогичные приведенному выше, могут использоваться для определения ориентации и используются в большинстве автономных навигационных систем. Например, если вы хотите сбалансировать робота, можно использовать гироскоп для измерения вращения из сбалансированного положения и отправки поправок на двигатель.
Основные понятия в этом руководстве
Перед тем, как углубиться в это руководство, вы можете прочитать некоторые из этих концепций, если вы с ними не знакомы.
Как работает гироскоп
Когда вещи вращаются вокруг оси, они имеют так называемую угловую скорость .Вращающееся колесо можно измерять в оборотах в секунду (RPS) или градусах в секунду (° / s).
Обратите внимание, что ось z гироскопа ниже совпадает с осью вращения колеса.
Если вы прикрепите датчик к колесу, показанному выше, вы можете измерить угловую скорость оси z гироскопа. Две другие оси не будут измерять вращение.
Представьте, если колесо вращается раз в секунду. У него будет угловая скорость 360 градусов в секунду.Также важно направление вращения колеса. По часовой стрелке вокруг оси или против часовой стрелки?
Трехосный гироскоп MEMS, подобный изображенному выше (ITG-3200), может измерять вращение вокруг трех осей: x, y и z. Некоторые гироскопы бывают одноосных и двухосных, но трехосный гироскоп в одном чипе становится меньше, дешевле и популярнее.
Гироскопы часто используются на объектах, которые совсем не вращаются очень быстро. Самолеты (надеюсь) не крутятся.Вместо этого они поворачиваются на несколько градусов по каждой оси. Обнаруживая эти небольшие изменения, гироскопы помогают стабилизировать полет самолета. Также обратите внимание, что ускорение или линейная скорость самолета не влияет на измерения гироскопа. Гироскопы измеряют только угловую скорость.
Гироскопы измеряют только угловую скорость.
Как гироскоп MEMS определяет угловую скорость?
Внутренний вид гироскопического датчика MEMS
Датчик гироскопа внутри MEMS крошечный (от 1 до 100 микрометров, размером с человеческий волос).Когда гироскоп вращается, небольшая резонирующая масса смещается при изменении угловой скорости. Это движение преобразуется в очень слаботочные электрические сигналы, которые могут усиливаться и считываться микроконтроллером хоста.
Как подключиться к гироскопу
Основными аппаратными соединениями для использования гироскопа являются power и интерфейс связи . Как всегда, обратитесь к таблице данных датчика за всей информацией о технических характеристиках и примерах соединений.
Коммуникационный интерфейс
Гироскопымогут иметь цифровой интерфейс или аналоговый .
Гироскопы с цифровым интерфейсом обычно используют протоколы связи SPI или I2C.
 Использование этих интерфейсов позволяет легко подключиться к микроконтроллеру хоста. Одним из ограничений цифрового интерфейса является максимальная частота дискретизации. I2C имеет максимальную частоту дискретизации 400 Гц. С другой стороны, SPI может иметь гораздо более высокую частоту дискретизации.
Использование этих интерфейсов позволяет легко подключиться к микроконтроллеру хоста. Одним из ограничений цифрового интерфейса является максимальная частота дискретизации. I2C имеет максимальную частоту дискретизации 400 Гц. С другой стороны, SPI может иметь гораздо более высокую частоту дискретизации.Гироскопы с аналоговым интерфейсом представляют скорость вращения посредством переменного напряжения, обычно между землей и напряжением питания. Для считывания сигнала можно использовать АЦП на микроконтроллере. Аналоговые гироскопы могут быть менее дорогими, а иногда и более точными, в зависимости от того, как вы читаете аналоговый сигнал.
Мощность
Гироскопы MEMS обычно маломощные. Рабочие токи находятся в диапазоне мА, а иногда и мкА.Напряжение питания для гироскопов обычно составляет 5 В или меньше. Цифровые гироскопы могут иметь выбираемые логические напряжения или работать от напряжения питания. Для любого цифрового интерфейса не забудьте подключить линии от 5 до 5 В и от 3,3 до 3,3 В. Кроме того, гироскопы с цифровыми интерфейсами могут иметь режимы пониженного энергопотребления и сна, что позволяет использовать их в приложениях с батарейным питанием. Иногда это преимущество перед аналоговым гироскопом.
Кроме того, гироскопы с цифровыми интерфейсами могут иметь режимы пониженного энергопотребления и сна, что позволяет использовать их в приложениях с батарейным питанием. Иногда это преимущество перед аналоговым гироскопом.
Как выбрать гироскоп
При выборе гироскопа необходимо учитывать множество спецификаций.Вот несколько наиболее важных полезных:
Диапазон
Диапазон измерения или диапазон полной шкалы – это максимальная угловая скорость, которую может прочитать гироскоп. Подумайте о том, что вы измеряете. Вам нужно измерить вращение проигрывателя, которое работает очень медленно, или вращающегося колеса, которое может быть очень быстрым?
Чувствительность
Чувствительность измеряется в мВ на градус в секунду (мВ / ° / с). Не позволяйте странному измерению этой ценности пугать вас.Он определяет, насколько изменяется напряжение при заданной угловой скорости. Например, если указан гироскоп с чувствительностью 30 мВ / ° / с, и вы видите изменение выходного сигнала на 300 мВ, вы повернули гироскоп со скоростью 10 ° / с.
Хорошее правило, которое следует запомнить: с увеличением чувствительности дальность действия уменьшается. Например, посмотрите таблицу данных гироскопа LPY503 или любой гироскоп с выбираемым диапазоном:
Обратите внимание, что с большим диапазоном страдает чувствительность и вы получаете меньшее разрешение.
Смещение
Как и в случае с любым другим датчиком, измеряемые вами значения будут содержать некоторую погрешность или смещение. Вы можете увидеть смещение гироскопа, измерив выходной сигнал, когда гироскоп неподвижен. Хотя вы думаете, что видите 0 °, когда гироскоп неподвижен, вы всегда будете видеть небольшую ненулевую ошибку на выходе. Эти ошибки иногда называют дрейфом смещения или нестабильностью смещения. На смещение сильно влияет температура сенсора. Чтобы свести к минимуму источник этой ошибки, большинство гироскопов имеют встроенный датчик температуры.Таким образом, вы можете считывать температуру датчика и исправлять любые изменения, зависящие от температуры. Чтобы исправить эти ошибки, гироскоп должен быть откалиброван. Обычно это делается, удерживая гироскоп в неподвижном состоянии и обнуляя все показания в вашем коде.
Чтобы исправить эти ошибки, гироскоп должен быть откалиброван. Обычно это делается, удерживая гироскоп в неподвижном состоянии и обнуляя все показания в вашем коде.
Идем дальше
К настоящему времени вы должны знать, как работает гироскоп, и иметь хорошую основу, чтобы начать работу с гироскопом в своем собственном проекте.
Ознакомьтесь с этими руководствами, в которых используются гироскопы:
Акселерометрvs.Гироскоп: в чем разница?
Для определения положения и ориентации объекта используется множество различных сенсорных устройств. Наиболее распространенными из этих датчиков являются гироскоп и акселерометр. Несмотря на схожие цели, они измеряют разные вещи. При объединении в одно устройство они могут создать очень мощный массив информации.
Что такое гироскоп?
Гироскоп – это устройство, которое использует гравитацию Земли для определения ориентации. Его конструкция состоит из свободно вращающегося диска, называемого ротором, установленного на оси вращения в центре большего и более устойчивого колеса. Когда ось поворачивается, ротор остается неподвижным, чтобы указать центральное гравитационное притяжение и, следовательно, направление «вниз».
Когда ось поворачивается, ротор остается неподвижным, чтобы указать центральное гравитационное притяжение и, следовательно, направление «вниз».
«Один типичный тип гироскопа состоит из подвешивания относительно массивного ротора внутри трех колец, называемых карданом», – говорится в учебном пособии Университета штата Джорджия. «Установка каждого из этих роторов на высококачественные опорные поверхности гарантирует, что очень небольшой крутящий момент может быть приложен к внутреннему ротору».
Гироскопы были впервые изобретены и названы в 19 веке французским физиком Жан-Бернаром-Леоном Фуко.Согласно Британской энциклопедии, только в 1908 году немецкий изобретатель Х. Аншютц-Кемпфе разработал первый работоспособный гирокомпас. Он был создан для использования в подводных лодках. Затем, в 1909 году, на нем был создан первый автопилот.
Что такое акселерометр?
Акселерометр – это компактное устройство, предназначенное для измерения негравитационного ускорения. Когда объект, в который он встроен, переходит из состояния покоя в любую скорость, акселерометр рассчитан на то, чтобы реагировать на вибрации, связанные с таким движением.В нем используются микроскопические кристаллы, которые подвергаются нагрузке при возникновении вибрации, и из-за этого напряжения генерируется напряжение для создания показаний при любом ускорении. Акселерометры являются важными компонентами устройств, которые отслеживают физическую форму и другие измерения при количественном измерении самодвижения.
Когда объект, в который он встроен, переходит из состояния покоя в любую скорость, акселерометр рассчитан на то, чтобы реагировать на вибрации, связанные с таким движением.В нем используются микроскопические кристаллы, которые подвергаются нагрузке при возникновении вибрации, и из-за этого напряжения генерируется напряжение для создания показаний при любом ускорении. Акселерометры являются важными компонентами устройств, которые отслеживают физическую форму и другие измерения при количественном измерении самодвижения.
Первый акселерометр был назван машиной Атвуда и был изобретен английским физиком Джорджем Атвудом в 1783 году, согласно книге Вилле Каякари «Практическая МЭМС».
Использование гироскопа или акселерометра
Основное различие между двумя устройствами простое: одно может определять вращение, а другое – нет.В некотором смысле акселерометр может определять ориентацию неподвижного объекта по отношению к поверхности Земли. При ускорении в определенном направлении акселерометр не может отличить это от ускорения, обеспечиваемого гравитационным притяжением Земли. Если принять во внимание этот недостаток при использовании в самолете, акселерометр быстро потеряет большую часть своей привлекательности.
Если принять во внимание этот недостаток при использовании в самолете, акселерометр быстро потеряет большую часть своей привлекательности.
Гироскоп сохраняет свой уровень эффективности за счет возможности измерения скорости вращения вокруг определенной оси.При измерении скорости вращения вокруг оси крена самолета он определяет фактическое значение до тех пор, пока объект не стабилизируется. Используя ключевые принципы углового момента, гироскоп помогает указать ориентацию. Для сравнения, акселерометр измеряет линейное ускорение на основе вибрации.
Типичный двухкоординатный акселерометр показывает пользователям направление силы тяжести в самолете, смартфоне, автомобиле или другом устройстве. Для сравнения, гироскоп предназначен для определения углового положения на основе принципа жесткости пространства.Приложения каждого устройства довольно сильно различаются, несмотря на схожее назначение. Гироскоп, например, используется в навигации на беспилотных летательных аппаратах, компасах и больших лодках, что в конечном итоге способствует стабильности в навигации. Акселерометры также широко используются в технике, машиностроении, мониторинге оборудования, мониторинге зданий и сооружений, навигации, транспорте и даже в бытовой электронике.
Акселерометры также широко используются в технике, машиностроении, мониторинге оборудования, мониторинге зданий и сооружений, навигации, транспорте и даже в бытовой электронике.
Появление акселерометра на рынке бытовой электроники с появлением таких широко распространенных устройств, как iPhone, использующих его для встроенного приложения компаса, способствовало его общей популярности во всех сферах программного обеспечения.Определение ориентации экрана, работа в качестве компаса и отмена действий простым встряхиванием смартфона – это несколько основных функций, которые зависят от наличия акселерометра. В последние годы его применение среди бытовой электроники теперь распространяется и на персональные ноутбуки.
Используемые датчики
Использование в реальных условиях лучше всего иллюстрирует различия между этими датчиками. Акселерометры используются для определения ускорения, хотя трехосевой акселерометр может определять ориентацию платформы относительно поверхности Земли. Однако, как только платформа начинает двигаться, интерпретировать ее показания становится сложнее. Например, при свободном падении акселерометр покажет нулевое ускорение. В самолете, выполняющем поворот под углом крена 60 градусов, трехосевой акселерометр регистрировал бы вертикальное ускорение 2G, полностью игнорируя наклон. В конечном счете, акселерометр не может использоваться в одиночку, чтобы помочь в правильной ориентации самолета.
Однако, как только платформа начинает двигаться, интерпретировать ее показания становится сложнее. Например, при свободном падении акселерометр покажет нулевое ускорение. В самолете, выполняющем поворот под углом крена 60 градусов, трехосевой акселерометр регистрировал бы вертикальное ускорение 2G, полностью игнорируя наклон. В конечном счете, акселерометр не может использоваться в одиночку, чтобы помочь в правильной ориентации самолета.
Акселерометры вместо этого находят применение во множестве бытовых электронных устройств.Например, среди первых смартфонов, которые использовали его, был iPhone 3GS от Apple с введением таких функций, как приложение компаса и встряхивание для отмены, согласно Wired.
Гироскоп будет использоваться в самолете, чтобы помочь в определении скорости вращения вокруг оси крена самолета. Когда самолет катится, гироскоп будет измерять ненулевые значения, пока платформа не выровняется, после чего он будет считывать нулевое значение, чтобы указать направление «вниз». Лучшим примером считывания показаний гироскопа является индикатор высоты на обычных самолетах.Он представлен круглым дисплеем с экраном, разделенным пополам, верхняя половина которого имеет синий цвет для обозначения неба, а нижний – красный цвет для обозначения земли. Когда самолет кренится для разворота, ориентация дисплея будет смещаться вместе с креном, чтобы учесть фактическое направление земли.
Предполагаемое использование каждого устройства в конечном итоге влияет на его практичность на каждой используемой платформе. Многие устройства выигрывают от наличия обоих датчиков, хотя многие полагаются на использование только одного.В зависимости от типа информации, которую вам нужно собрать – ускорения или ориентации – каждое устройство даст разные результаты.
Дополнительный отчет Алины Брэдфорд, автора Live Science.
Дополнительные ресурсы
3-осевой акселерометр и 6-осевой гироскоп: в чем разница?
3-осевой акселерометр против 6-осевого гироскопа – это выбор, с которым вы можете столкнуться при рассмотрении того, какая из этих технологий наиболее подходит для добавления в устройство.Узнайте об обоих датчиках, какие типы измерений они могут поддерживать и где их использовать.
Что такое трехосевой акселерометр?
3-осевой акселерометр измеряет ускорения, которые имеют место по отношению к 3 осям декартовой системы координат. Другими словами, он может измерять изменения скорости точки.
Этот инструмент используется, в частности, в шагомерах, индустрии видеоигр и робототехнике, где регистратор данных акселерометра измеряет силы ускорения – динамические или статические.Статические силы включают гравитацию, а динамические силы могут включать колебания и движения.
Одно из наиболее распространенных применений – это, например, автомобильные датчики. Ускорения представлены вектором, который указывает направление движения точки, и его модулем, который указывает интенсивность.
Датчик акселерометра может рассчитать угол наклона, измеряя ускорение свободного падения. Кроме того, он также может определять направление и скорость движущегося объекта, принимая во внимание динамическое ускорение.
Что такое 6-осевой гироскоп?
гироскопа или гироскопа представляет собой устройство, которое позволяет для измерения изменений в ориентации, которые имеют место вокруг оси отсчета. Это предоставляет информацию, которая позволяет устройству измерять свою ориентацию, поддерживать ее или изменять.
Таким образом, 6-осевой гироскоп представляет собой датчик с 6 степенями свободы, поскольку он имеет три оси для измерения скорости поворота и еще три оси для измерения ускорения.Другими словами, он объединяет акселерометр с 3 декартовой осью координат с датчиком, который выполняет гироскопические измерения по этим трем осям: тангаж, крен и рыскание.
Его наиболее распространенные применения включают его использование в самолетах, цифровых камерах (например, для панорамных фотографий или контроля устойчивости) или некоторых игрушках.
Его цель – обеспечить стабильность за счет учета движений, вызванных вибрацией, а ряд приложений позволяет считывать результаты измерений.
Откройте для себя наиболее используемые методы тестирования для достижения стабильности нагрузки в течение цикла распределения
3-осевой акселерометр и 6-осевой гироскоп: разница
3-осевой акселерометр и 6-осевой гироскоп Сравнение показывает, что есть являются основными различиями между их технологиями, точностью, единицами измерения и т. д. Но одно из основных различий в их использовании заключается в том, что гироскоп может измерять на больше параметров.
В случае акселерометра три оси связаны между собой и фиксированы, что означает, что этот инструмент использует себя в качестве системы отсчета.
Это выражается в двух характеристиках: он не может идентифицировать изменения своего положения, и если акселерометр повернуть, ориентация осей изменится.
В этом случае, если акселерометр расположен в центре рулетки, регулируя одну из его осей в соответствии с вращением рулетки, акселерометр не сможет обнаружить изменения скорости рулетки.
И наоборот, гироскоп способен измерять эти изменения ориентации. Фактически, поскольку они способны измерять силы ускорения и скорость , а также ориентацию силы тяжести, они широко используются в современной технике, например, в беспилотных транспортных средствах и навигационных системах.
Какой из них лучше для ваших продуктов?
Критерии выбора использования 3-осевого акселерометра по сравнению с 6-осевым гироскопом в любой технологии будут полностью зависеть от конкретных потребностей компании и продуктов, которые она производит.
Это можно проанализировать на двух примерах:
- С одной стороны, компания хочет изучить американские горки, где тележки прикреплены к рельсам, по которым они движутся, а пользователи, которые едут на них, в свою очередь, привязаны. дюйм. В этом случае будет интересно измерить ускорения, так как вращения не влияют на систему. Здесь подойдут и акселерометр , и гироскоп.
И наоборот, гироскоп потребуется, когда необходимо определить, какие изменения ориентации происходят и как это может повлиять на продукт.
- Лучшим примером гироскопа является указатель ориентации, переносимый самолетом, представленный круговым разделенным экраном, верхняя половина которого имеет небесно-голубой цвет, обозначающий небо, а нижняя половина – красная, обозначающая землю. По мере того, как дрон движется и кренится для поворота, ориентация экрана будет меняться, чтобы отображать реальное направление земли.
Приложения в моделировании транспорта
Для грузовых компаний и крупных многонациональных компаний, которые ежедневно перевозят грузы, использование регистраторов данных становится все более распространенным, с целью выявления сил, которые непосредственно влияют на груз. транспортируется.Регистратор данных размещается внутри транспортного средства, поэтому он фиксирует все события, происходящие во время распространения. Записанные данные впоследствии анализируются для проведения испытаний с моделированием транспортировки и изучения в лабораторных условиях того, как ведет себя груз и как на него влияют силы, возникающие во время транспортировки.
Например, innRecord от Safe Load Testing Technologies является важным устройством, когда дело доходит до регистрации трехосных вибраций, ускорений, движений по тангажу и крену, а также ударов в грузовике, корабле или самолете во время цикла распространения, спасибо к его двум акселерометрам и одному гироскопу.
Это устройство может записывать маршруты на основе силы и частоты вибраций, возникающих при транспортировке (PSD) в трех измерениях, плюс вращение по осям (крен и тангаж).
Вся информация сохраняется на карте microSD, и после анализа ее можно использовать для воспроизведения реальных условий транспортировки груза с целью оптимизации упаковки и обеспечения безопасности продуктов.
В моделировании транспорта наиболее распространены испытания, такие как испытания на вибрацию, испытания на падение, испытания на ускорение / замедление и испытания на удар, поскольку это силы, которые больше всего влияют на груз во время транспортировки.
Если вы хотите знать, как ведут себя ваши товары при транспортировке, или если вы хотите выполнить более реалистичных имитаций , не стесняйтесь обращаться к нам. Мы будем рады помочь вам найти лучшее решение для вашего проекта.
Amazon.com: Модуль MPU-9250 9DOF Девятиосевой гироскопический компас положения Датчик магнитного поля ускорение Трехосевой гироскоп Трехосный акселерометр Трехосное магнитное поле: камера и фото
| Цена: | 7 долларов.99 + Без залога за импорт и $ 17,53 за доставку в Российскую Федерацию Подробности |
для трехосного гироскопа
[1] П.Грейфф Б. Боксенхорн , Микромеханический гироскопический преобразователь с улучшенными возможностями привода и восприятия , Патент США , 5,408,877 апрель (1995).
[2] Дж.Бернсте, С. Чо, А. Кинг, А. Курепедс, П. MacieI, M. Wdnberg, A Mcromachined Comb-DriveTudng гироскоп скорости, дайджест IEEE / ASME Micro - Electro-Mechanical Systems Workshop (MEMS’93), Форт-Ландердейл, Флорида, февраль 1993 г., 143–148.
DOI: 10.1109 / memsys.1993.296932
[3] М.Вайнберг, Дж. Бемштейн, С. Чо, А. Король А. Курепедс, П. Уорд, Макромеханический гироскоп с камертонной вилкой, Результаты испытаний, AIAA Guidance, Navigation , and Control Coference, ScottsdaIe, AZ, август 1994 г., I298-1303.
[4] Фаррох Аязи, Халил Наджафи, Гироскоп с вибрирующим кольцом из поликремния Harpss, ЖУРНАЛ МИКРОЭЛЕКТРОМЕХАНИЧЕСКИХ СИСТЕМ, ТОМ.10, NO. 2, ИЮНЬ 2001, стр. 169–179.
DOI: 10.1109 / 84.925732
Оптимальное количество осей для датчиков движения
Датчики одного типа не обязательно измеряют одни и те же «вещи». В нашем последнем сообщении в блоге сравниваются одно- и многоосевые датчики, чтобы помочь вам выбрать правильную конфигурацию для вашего приложения.
5 февраля 2019 г., вторник
При оценке различных датчиков движения учитывайте количество осей, которое ваше устройство должно измерять для вашего приложения. Затем рассмотрите возможности, которые могут быть открыты путем измерения дополнительных или других осей. Выбор подходящего датчика на ранней стадии процесса разработки приведет к оптимальному соотношению цены и производительности, быстрому выводу на рынок и низким затратам на разработку и продукцию.
ОдноосныйПростейшим устройством измерения движения MEMS (Microelectromechanical System) является одноосевой датчик, такой как гироскоп или акселерометр.Акселерометры измеряют вибрацию или изменение скорости, в то время как гироскопы измеряют изменение ориентации устройства (тангаж, рыскание и крен) путем измерения угловой скорости.
Но, как следует из названия, одноосевой датчик движения может измерять движение только по одной оси (x, y или z). Таким образом, одноосевой датчик может измерять ускорение или вращение в одной плоскости, но не может определять ориентацию или направление устройства относительно любой начальной или абсолютной точки. Это может быть полезно, если ваше приложение обычно используется в одном или двух измерениях, где дополнительная информация не имеет значения.Используя одноосевой датчик, вы можете упростить обработку и снизить затраты. Просто убедитесь, что вам не нужен дополнительный контекст, чтобы ваше приложение работало наилучшим образом. В противном случае, чтобы добавить этот тип информации, вам необходимо использовать несколько одноосных датчиков в комбинации или многоосевой датчик.
Другие типы (неподвижных) одноосных датчиков включают термометры и барометры.
Обычное использование:- 2D-поверхности (наземные приложения, такие как роботы-пылесосы)
- В сочетании с другими датчиками для создания инерциальной измерительной единицы (IMU) или добавления контекста (термометр – насколько горячо / холодно было, барометр – насколько высоко)
- Используются сами по себе для измерения особого поведения (поиск выпуклости / поворота в определенном измерении)
3-осевой датчик может измерять угловое движение по трем осям (x, y и z).Большинство акселерометров, гироскопов и магнитометров имеют такую возможность измерения. Это не без уважительной причины. Если вы хотите отслеживать конкретный ввод в трех измерениях, вам понадобятся все 3 оси.
Обычное использование:- Акселерометр: навигация и транспорт, бытовая электроника, промышленное применение
- Магнитометр: горнодобывающая промышленность и разведка полезных ископаемых, нефтегазовые приложения, смартфоны, военные приложения, магнитная съемка
- Гироскоп: интеллектуальные технологии, промышленные приложения, GPS и навигация, бытовая электроника, приложения AR / VR
- Любое 3-осевое устройство: Объединено в IMU
Типичные блоки IMU – это 6-осевые, состоящие из 3-осевого гироскопа с 3-осевым акселерометром.Эта конфигурация обеспечивает относительный заголовок, то есть изменение заголовка по сравнению с предыдущим заголовком, но не абсолютный заголовок. Он также предоставляет информацию об относительной ориентации или наклоне (тангаж и крен) по сравнению с предыдущей ориентацией. Как только вы попадаете в IMU с несколькими входами датчиков, объединение датчиков помогает понять необработанный выходной сигнал датчика.
Одним из недостатков 6-осевых IMU является то, что без контрольной точки они могут быть склонны к постепенному накоплению мелких ошибок с течением времени, что приводит к смещению направления.Это можно увидеть в реальном мире, когда роботы медленно отклоняются от намеченного курса.
Обычное использование:- Навигация (счисление и т. Д.)
- Отслеживание движения бытовой электроники (AR / VR, смартфоны, домашние роботы)
- Промышленное применение
- Применение в аэрокосмической и авиационной промышленности
9-осевой IMU добавляет информацию от 3-осевого магнитометра к гироскопу и акселерометру.Магнитометр измеряет магнитные поля, обеспечивая фиксированную точку отсчета (магнитное поле Земли). Эти данные могут быть объединены с данными гироскопа и акселерометра для получения абсолютного курса: не только то, на сколько градусов изменилось направление, но и его отношение к магнитному северу. Таким же образом 9-осевые устройства также измеряют положение (рыскание, тангаж, крен) или абсолютную ориентацию относительно системы отсчета.
Усовершенствованная комбинация датчиков дополнительных осей также позволяет компенсировать отклонения в течение длительных периодов времени, обеспечивая более надежное динамическое направление, чем 6-осевая альтернатива.Многие распространенные применения 6-осевого IMU могут увидеть расширенные возможности с переключением на 9-осевой IMU. Например, дроны могут ориентироваться, чтобы двигаться в определенном направлении света, чтобы следовать за солнцем над холмами или более эффективно обыскивать местность.
Обычное использование:- Игры AR и VR
- Робототехника и автономные транспортные средства
- Мировоззрение
Некоторые датчики могут иметь другое количество осей – четыре, семь, десять и т. Д.Это относится к дополнительным типам одноосевых датчиков. Эти одноосные датчики часто собирают данные, отличные от положения или движения, включая уровни жидкости или такие факторы окружающей среды, как температура, влажность или давление воздуха. Эта информация об окружающей среде добавляет важный контекст к информации о движении, предоставляя данные, которые могут помочь датчику движения оптимально работать в различных условиях реального мира.
Обычное использование:- Применение в автомобильной промышленности
- Приложения HVAC
- Применение в медицинской промышленности
- Спорт на открытом воздухе и такие мероприятия, как пеший туризм
Каждый тип датчика имеет свое применение.Но современные сложные устройства обычно получают больше данных, чем меньше. Многоосные IMU могут выполнять свою работу, но понимание их возможностей по сравнению с , необходимыми для вашего , позволит вам выбрать подходящий для вашего приложения.
Если вы хотите обсудить свой выбор, свяжитесь с нами. Мы работаем с группами разработчиков, чтобы определить правильную конфигурацию датчика и сочетания датчиков для их применения.
Автор
Чарльз Пао
Чарльз Пао начал работать в Hillcrest Labs после окончания Университета Джона Хопкинса со степенью магистра наук в области электротехники.Он начал разработку программного обеспечения, создав систему черного ящика для оценки характеристик движения. Обладая страстью к средствам массовой информации и коммуникациям, Чарльз начал выпускать демонстрационные ролики и видеоролики о продуктах для Hillcrest Labs. Это увлечение привело к переходу на официальную должность в отдел маркетинга. В настоящее время он является первым контактным лицом компании Hillcrest для получения информации и поддержки, а также руководит их маркетинговыми усилиями. Он также занимал различные должности по управлению счетами и проектами. Чарльз также получил степень бакалавра наук в области электротехники и вычислительной техники в Университете Джона Хопкинса.Возможно вам также понравится
Больше от Sensor fusion
Контекстная осведомленность: что это такое и как оно используется?
Отправлено: 17 марта 2021 г. Элия ШенбергерКонтекстно-зависимые устройства, такие как встроенные клавиатуры смартфонов, существуют уже некоторое время, хотя и в очень ограниченной форме.…
Зачем нужна конструкция, не зависящая от датчиков
Отправлено: 7 марта 2021 г. Чарльз ПаоИз-за пандемии COVID-19 практически каждая производственная вертикаль сталкивается со значительными проблемами в цепочке поставок.В частности, для производителей электроники…
Достижение точного отслеживания движения в портативных потребительских портативных устройствах
Отправлено: 11 ноября 2020 г. Чарльз ПаоНашу жизнь изменили портативные подключенные гаджеты – наиболее очевидно смартфон, но также и множество других…
Что такое 6-осевой гироскоп и как он сравнивается с 3-осевым?
В этой статье мы рассмотрим гироскоп и точную разницу в количестве осей.На самом деле в 6-осевом гироскопе нет шести осей, это всего лишь 3 оси с двумя типами датчиков.
Основы: Что такое гироскоп?
Гироскоп – это электронное устройство, измеряющее угловую скорость. Датчики вибрации используются для определения угловой скорости по силе Кориолиса, приложенной к вибрирующему элементу. Они также известны как датчики угловой скорости или датчики скорости.
Устройства, использующие эту технологию, включают: самолеты, гоночные автомобили, моторные лодки, роботы, видеоигры, радиоуправляемые игрушки, цифровые фотоаппараты и наиболее распространенное использование гироскопа в вашем смартфоне.Эти датчики обеспечивают стабильность и направление, обнаруживая движение, вызванное вибрацией. Есть много применений гироскопических датчиков. В навигационных системах его можно использовать для определения угловой скорости движения датчика. Эти углы обнаруживаются процессором посредством операции интеграции. Вы можете прочитать их с помощью приложения. Использование гироскопов широко распространено и даже может применяться в легкой атлетике для определения способности бегуна к движению. В квадрокоптерах в основном использовался 3-осевой гироскоп, но введение 6-осевого гироскопа сделало их более стабильными.
Крупный план автожира.Как работают гироскопы.
Когда ваше устройство вращается в определенном направлении, гироскопические датчики определяют движение на приводном рычаге. Когда гироскоп вращается, сила Кориолиса действует на приводной рычаг, вызывая вертикальную вибрацию. Это заставляет неподвижную часть изгибаться, заставляя чувствительный рычаг обнаруживать движение. Следовательно, угловая скорость определяется движением чувствительных рычагов. Затем он преобразуется и излучается как электрический сигнал.
Есть много применений гироскопических датчиков.В навигационных системах его можно использовать для определения угловой скорости движения датчика. Эти углы обнаруживаются процессором посредством операции интеграции. Вы можете прочитать их с помощью приложения. Использование гироскопов широко распространено и даже может применяться в легкой атлетике для определения двигательной способности бегуна.
Вибрации, вызванные внешними факторами, также могут распознаваться гироскопом. Он обнаруживает вибрацию, а затем передает данные в ЦП. Колебания преобразуются в электрические сигналы, которые может считывать компьютер.Удаленный оператор может корректировать ориентацию или баланс своего объекта. Это также используется в камерах для коррекции дрожащих кадров (электронная стабилизация изображения), а также как ваш квадрокоптер может противодействовать ветру и другим помехам.
InvenSense имеет 6-осевой гироскоп, который используется во многих квадрокоптерах, большинство разборок, которые я делал, используют эти 6-осевые гироскопы. Цветные оси X, Y и Z – это 3 оси, а черные стрелки – акселерометр.3 оси Vs. 6-осевые гироскопы.
Основное различие между 3-осевым и 6-осевым гироскопом состоит в том, что последний имеет 3 акселерометра в дополнение к трем стандартным датчикам ориентации.Датчики тангажа, рыскания и крена будут хорошо управлять вашим 3-осевым коптером, но добавленная функция делает 6-осевую более устойчивой к смещению высоты.
Акселерометры компенсируют любое нежелательное ускорение или просто движение в трех измерениях. Это гарантирует, что квадрокоптер может свободно летать без помех от ветра, подниматься слишком высоко или падать на землю. Любой пользователь, который учится управлять удаленным самолетом, может легко делать крутые повороты, применяя функции руля направления и крена также и по 6 осям.
Другое преимущество 6-осевого квадрокоптера заключается в том, что объединение шести датчиков может определять как необычное положение, так и падение. Благодаря центрированию регуляторов тангажа и использованию газа, 6-осевой квадроцикл стабильно зависает. Это поможет поднять его на желаемую высоту, если он летит слишком высоко, или переместить его в вертикальное положение, если он летит лицом в противоположную сторону, например, вверх ногами. Даже если ваш квадроцикл кувыркается при уменьшении высоты, вам просто нужно увеличить газ, прежде чем он коснется земли, чтобы он стал устойчивым.(Я уверен, что мы все это делали раньше).
Я надеюсь, что этот обзор помог вам познакомиться с термином «6-осевой гироскоп», и теперь вы больше осведомлены о ключевом термине и функциях вашего мультикоптера. У нас есть ряд доступных квадроциклов, шестигранников и несколько октанов в нашем разделе мультикоптеров, поэтому, если вы ищете новый летающий гироскоп, просмотрите наш ассортимент.
Знаешь о гироскопах больше меня?
Поделитесь своими знаниями ниже, и я дополню статью вашими идеями и критическими замечаниями.
.