
Тиристорные коммутаторы нагрузки (10 схем)
Для включения и отключения нагрузки (ламп накаливания, обмоток реле, электродвигателей и т.п.) зачастую используют тиристоры. Особенность этого вида полупроводниковых приборов и основное их отличие от транзисторов заключается в том, что они обладают двумя устойчивыми состояниями, без каких-либо промежуточных.
Это состояние «включено», когда сопротивление полупроводникового прибора минимально, и состояние «выключено», когда сопротивление тиристора максимально. В идеале эти сопротивления приближаются к нулю или бесконечности.
Для включения тиристора на его управляющий электрод достаточно хотя бы кратковременно подать управляющее напряжение. Отключить тиристор (запереть) можно кратковременным выключением питания тиристора, сменой полярности питающего напряжения либо уменьшением тока в нагрузке ниже тока удержания тиристора.
Обычно включают и отключают тиристорные коммутаторы двумя кнопками. Значительно меньшее распространение получили однокнопочные схемы управления тиристорами.
Здесь подробно рассмотрены методы однокнопочного управления тиристорными коммутаторами. Принцип работы тиристорных однокнопочных управляющих устройств основан на динамических зарядно-разрядных процессах в цепи управления тиристора [EW 4/01-299].
Схема однокнопочного управления тиристором
На рисунке 1 показана одна из простейших схем однокнопочного управления тиристорным коммутатором. В схеме (здесь и далее) используют кнопки без фиксации положения. В исходном состоянии нормально замкнутые контакты кнопки шунтируют цепь управления тиристором.
Сопротивление тиристора максимально, ток через нагрузку не протекает. Диаграммы основных процессов, протекающих в схеме на рис. 1, рассмотрены на рис. 2.
Для включения тиристора (ON) нажимают на кнопку SB1. При этом нагрузка оказывается подключенной к источнику питания через контакты кнопки SB1, а конденсатор С1 заряжается через резистор R1 от источника питания.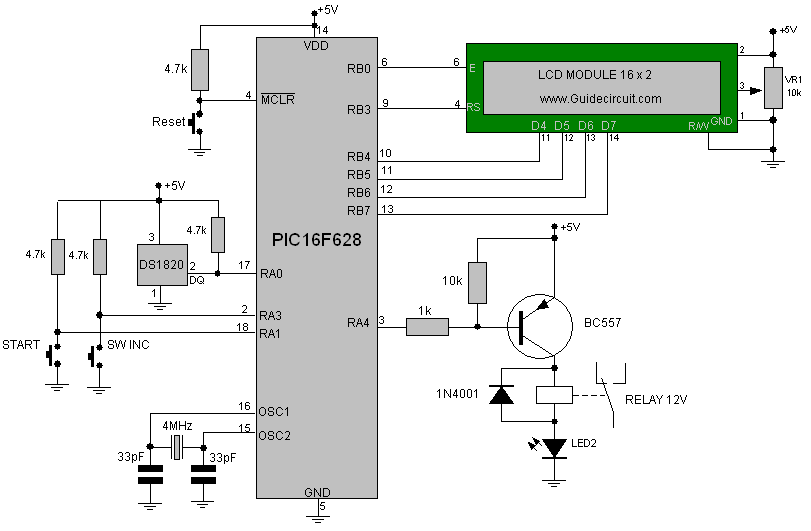
Скорость заряда конденсатора определяется постоянной времени цепи R1C1 (см. диаграмму). После того как кнопку отпустят, конденсатор С1 разряжается на управляющий электрод тиристора. Если напряжение на нем равно или превышает напряжение включения тиристора, тиристор отпирается.
Рис. 1. Принципиальная схема управления тиристором с помощью одной кнопки.
Рис. 2. Диаграммы основных процессов, протекающих в схеме с тиристором.
Отключить нагрузку (OFF) можно кратковременным нажатием на кнопку SB1. При этом конденсатор С1 не успевает зарядиться. Поскольку контакты кнопки шунтируют электроды тиристора (анод — катод), это равноценно отключению источника питания тиристора. В результате нагрузка будет отключена.
Следовательно, для включения нагрузки необходимо с большей продолжительностью нажать на управляющую кнопку, для отключения — еще раз кратковременно нажать ту же кнопку.
Простые силовые ключи на тиристорах
На рис. 3 и 4 показаны варианты схемной идеи, представленной на рис. 1. На рис. 3 использована цепочка последовательно соединенных диодов VD1 и VD2 для ограничения максимального напряжения заряда конденсатора.
Рис. 3. Вариант схемы управления тиристором одной кнопкой.
Это позволило заметно снизить рабочее напряжение (до 1,5…3 В) и емкость конденсатора С1. В следующей схеме (рис. 4) резистор R1 включен последовательно с нагрузкой, что позволяет создать двухполюсный коммутатор нагрузки. Сопротивление нагрузки должно быть намного ниже, чем сопротивление R1.
Рис. 4. Схема электронного ключа на тиристоре с последовательным подключением нагрузки.
Тиристорный коммутатор с двумя кнопками
Тиристорное устройство управления нагрузкой (рис. 5) может быть использовано для включения и выключения нагрузки любой из нескольких последовательно включенных кнопок, работающих на разрыв цепи. Принцип действия тиристорного коммутатора заключается в следующем.
При включении устройства напряжение, подаваемое на управляющий электрод тиристора, недостаточно для его включения.
Рис. 5. Схема простого тиристорного коммутатора нагрузки с двумя кнопками.
После отпускания кнопки и восстановления цепи питания тиристора накопленная конденсатором С1 энергия оказывается приложенной к управляющему электроду тиристора. В результате разряда конденсатора через управляющий электрод тиристор включается, подсоединяя тем самым нагрузку к цепи питания.
Для отключения тиристора (и нагрузки) кратковременно нажимают на любую из кнопок SB1 — SBn. При этом конденсатор С1 не успевает зарядиться. В то же время цепь питания тиристора размыкается, тиристор запирается.
Величина резистора R2 зависит от напряжения питания устройства: при напряжении 15 В его сопротивление — 10 кОм при 9 В — 3,3 кОм при 5 6-1,2 кОм.
Схема с эквивалентом тиристора на транзисторах
При использовании вместо тиристора его транзисторного аналога (рис. 6) величина этого резистора меняется, соответственно, от 240 кОм (15 В) до 16 кОм (9 В) и до 4,7 кОм (5 В).
Рис. 6. Схема электронного коммутатора нагрузки с транзисторным эквивалентом тиристора.
Аналог многокнопочного переключателя на тиристорах
Тиристорное устройство, позволяющее создать аналог многокнопочного переключателя с зависимой фиксацией положения и использующее для управления кнопочные элементы, работающие без фиксации, показано на рис. 7. В схеме может быть использовано несколько тиристоров, однако, для упрощения схемы, на рисунке показано лишь два канала. Другие каналы коммутации могут быть подключены аналогично предыдущим.
Рис. 7. Принципиальная схема аналога многокнопочного переключателя с использованием тиристоров.
В исходном состоянии тиристоры заперты. При нажатии на кнопку управления, например, кнопку SB1, конденсатор С1 относительно большой емкости оказывается подключенным к источнику питания через диоды VD1 — VDm и сопротивления нагрузки всех каналов.
В результате заряда конденсатора возникает импульс тока, приводящий к кратковременному замыканию анодов всех тиристоров через соответствующие диоды VD1 — VDm на общую шину.
Любой из тиристоров, если он был включен, отключается. В то же время конденсатор накапливает энергию. После отпускания кнопки конденсатор разряжается на управляющий электрод тиристора, отпирая его.
Для включения любого другого канала нажимают соответствующую кнопку. Происходит отключение (сброс) ранее задействованной нагрузки и включение новой нагрузки. В схеме предусмотрена кнопка SB0 общего отключения всех нагрузок.
Многокнопочный переключатель с транзисторным аналогом тиристоров
Рис. 8. Схема эквивалентной замены тиристора транзисторами.
В схеме предусмотрена светодиодная индикация включенного канала. В этой связи максимальный ток нагрузки каждого из каналов ограничен значением 20 мА.
Рис. 9. Схема многокнопочного переключателя с транзисторным аналогом тиристоров.
Устройства, аналогичные представленным на рис. 7 – 9, а также на рис. 10 – 12, можно использовать для систем выбора программ радио- и телеприемников.
Недостатком схемных решений (рис. 7 – 9) является то, что в момент нажатия на любую из кнопок все нагрузки оказываются хотя бы на мгновение подключенными к источнику питания.
Схемы многопозиционных переключателей
На рис. 10 и 11 показан тиристорный коммутатор разрывного типа с неограниченным количеством последовательно включенных элементов.
При нажатии на одну из кнопок управления цепь питания аналогов тиристоров размыкается по постоянному току. Конденсатор С1 оказывается включенным последовательно с аналогом тиристора.Рис. 10. Схема базового элемента для самодельного многопозиционного коммутатора нагрузки.
Рис. 11. Принципиальная схема самодельного многопозиционного коммутатора нагрузки.
Одновременно управляющее напряжение (нулевого уровня) через задействованную кнопку и резистор R2 (рис. 10) подается на управляющий электрод аналога тиристора.
Поскольку в первые мгновения при нажатии кнопки последовательно с аналогом тиристора оказывается включенным полностью разряженный конденсатор, такое включение равносильно короткому замыканию в цепи питания соответствующего тиристора. Следовательно, тиристор отпирается, включая тем самым соответствующую нагрузку.
При нажатии на любую другую кнопку ранее задействованный канал отключается, и включается другой канал. При длительном (порядка 2 сек) нажатии на любую из кнопок конденсатор С1 заряжается, что равнозначно размыканию цепи и приводит к запиранию всех тиристоров.
Схема усовершенствованного электронного переключателя
Рис. 12. Принципиальная схема тиристорного коммутатора для множества нагрузок.
В ряду тиристорных коммутаторов наиболее совершенной представляется схема, показанная на рис. 12. При нажатии кнопки управления возникает бросок тока, эквивалентный короткому замыканию.
Происходит отключение ранее задействованных тиристоров и включение тиристора, соответствующего нажатой кнопке. В схеме предусмотрена светодиодная индикация задействованного канала, а также кнопка общего сброса.
Вместо конденсаторов большой емкости могут быть использованы диодно-конденсаторные цепочки (рис. 12). Принцип действия схемы сохраняется. В качестве нагрузки можно использовать низковольтные реле, например, РМК 11105 сопротивлением 350 Ом на рабочее напряжение 5 В.
Резистор R1 ограничивает ток короткого замыкания и ток максимального потребления величиной 10… 12 мА. Количество каналов коммутации не ограничено.
Литература: Шустов М.А. Практическая схемотехника (Книга 1), 2003 год.
Драйвер управления транзисторами и тиристорами DC/AC.
Принципиальная схема.
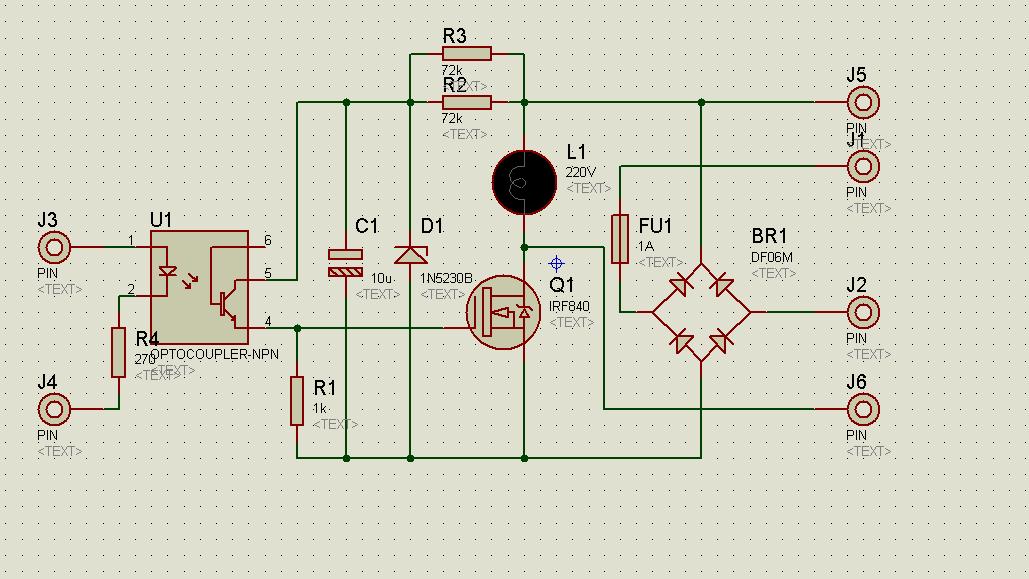
Данная схема является продолжением работы над драйвером управления транзисторами и дополнена функционалом необходимым для включения и выключения тиристоров в цепях постоянного и переменного тока без привзяки к фазе питающего напряжения. Схема и разводка печатной платы доступна по данной ссылке .
В основе устройства N-канальные полевые транзисторы либо IGBT.
Выполнена гальваническая развязка между цепями управления и силовой частью.
Установлен разъём IDC10 для подключения к микроконтроллеру. Выбор порта осуществляется установкой соответсвующей перемычки.
Реализована работа N-канальных транзисторов в верхнем ключе до 2KV.
Возможно использование ключей для коммутации цепей переменного тока.
Предусмотрено подключение внешних IGBT сборок или транзисторов.
Инверсия входного сигнала.
Регулируемая задержка переднего фронта сигнала.
По переднему фронту формируется импульс заданной длительности.
Генерация коротких импульсов с настраиваемыми длительностью импульса и паузами между ними.
Управление тиристорами.
Использование тиристоров в качестве ключей позволяет управлять силовой
нагрузкой значительной мощности, превосходящей возможности большинства
транзисторов. Для использования тиристоров в качестве силовых ключей в
цепях постоянного и переменного тока прорабатывается схемотехника управления
тиристорами.
Если замкнуть катод и анод тиристора, то ток идущий через тиристор снижается до величины меньшей Iвыкл, в результате тиристор закроется. Если снять напряжение с управляющего электрода тиристора, замкнуть ключ соединяющий анод и катод, то после размыкания ключа тиристор будет заперт, ток через него течь не будет.
По спаду управляющего сигнала, формируется импульс запирающий тиристор через замыкание катода и анода тиристора – красный луч. Замыкание анода и катода реализовано через транзисторную пару включенную по схеме нечувствительной к полярности источника питания нагрузки.
На осциллограмме ниже показано как соотносится изменение напряжения на нагрузке - синий луч, к управляющему сигналу – жёлтый луч. Сигнал закрытия транзистора формируется по спаду управляющего сигнала, на осциллограмме курсором показано время в течение которого должен быть замкнут катод и анод тиристора для гарантированного закрытия тиристора. Соответственно схема формирующая управляющий сигнал должна учитывать это время.
Тиристор допускает прохождение тока только в одном направлении, поэтому для работы в цепи переменного тока требуется два тиристора включенных встречно.
Включение тириситора осуществлялось подачей напряжения на его управляющий электрод
с импульсного трансформатора B82804A0264A210. При длительности импульса более пятнадцати
микросекунд данный импульсный трансформатор греется и после выходит из строя.
По итогам тестирования индуктивных нагрузок в резонансе времени включения в 10 мкс недостаточно, поэтому в итоговой версии драйвера было принято решение вместо импульсного трансформатора использовать ферритовое кольцо с намотанными на нем 50 витками провода UTP с размещением его непосредственно на управляющем электроде тиристора.
Данная техника работы с тиристорами на стадии тестирования, поэтому для полноценной работы с тиристорами требуется две схемы драйвера. Первый на включение с формированием импульса по переднему фронту на включение и второй с генерацией аналогичного импульса инвертированного входного сигнала на выключение. Установка транзисторов на включение через импульсный трансформатор не требуется. Достаточно токов драйвера.
На видео демонстрируется работоспособность схемы в цепи постоянного тока – включение и выключение лампы накаливания 12V и управление нагрузкой в сети 220V с переменным напряжением. На частотах вплоть до 20кГц и работе на нагрузку в 150 ватт нагрев силовых электронных компонентов отсутствует.
Заметки на будущее:
В случае ёмкостной или активной нагрузки рассматриваемая схемотехника включения и выключения тиристоров работает идеально. С индуктивной нагрузкой, если та ещё и в резонансе – сложности. Трудно добиться стабильной работы. Частично помогает снаббер. Гарантированному включению тиристора способствует генерация коротких импульсов.
 Но в любом случае нужна обратная связь.
Но в любом случае нужна обратная связь.
Радует что при ошибках оператора вылетают пробки, а не полупроводниковый прибор как это гарантированно случается с транзисторами не зависимо от цены.
062-Как подключить к микроконтроллеру нагрузку? — GetChip.net
В следующих статьях будут устройства, которые должны управлять внешней нагрузкой. Под внешней нагрузкой я понимаю все, что прицеплено к ножкам микроконтроллера – светодиоды, лампочки, реле, двигатели, исполнительные устройства … ну Вы поняли. И как бы не была заезжена данная тема, но, чтобы избежать повторений в следующих статьях, я все-же рискну быть не оригинальным — Вы уж меня простите :). Я кратенько, в рекомендательной форме, покажу наиболее распространенные способы подключения нагрузки (если Вы что-то захотите добавить – буду только рад).Сразу договоримся, что речь идет о цифровом сигнале (микроконтроллер все-таки цифровое устройство) и не будем отходить от общей логики: 1-включено, 0-выключено. Начнем.
1 НАГРУЗКА ПОСТОЯННОГО ТОКА.
Нагрузкой постоянного тока являются: светодиоды, лампы, реле, двигатели постоянного тока, сервоприводы, различные исполнительные устройства и т.д. Такая нагрузка наиболее просто (и наиболее часто) подключается к микроконтроллеру.
1.1 Подключение нагрузки через резистор.
Самый простой и, наверно, чаще всего используемый способ, если речь идет о светодиодах.
Резистор нужен для того, чтобы ограничить ток протекающий, через ножку микроконтроллера до допустимых 20мА. Его называют балластным или гасящим. Примерно рассчитать величину резистора можно зная сопротивление нагрузки Rн.
Rгасящий = (5v / 0.02A) – Rн = 250 – Rн [Om]
Как видно, даже в самом худшем случае, когда сопротивление нагрузки равно нулю достаточно 250 Ом для того, что бы ток не превысил 20мА. А значит, если неохота чего-то там считать — ставьте 300 Ом и Вы защитите порт от перегрузки. Достоинство способа очевидно – простота.
А значит, если неохота чего-то там считать — ставьте 300 Ом и Вы защитите порт от перегрузки. Достоинство способа очевидно – простота.
1.2 Подключение нагрузки при помощи биполярного транзистора.
Если так случилась, что Ваша нагрузка потребляет более 20мА, то, ясное дело, резистор тут не поможет. Нужно как-то увеличить (читай усилить) ток. Что применяют для усиления сигнала? Правильно. Транзистор!
Для усиления удобней применять n-p-n транзистор, включенный по схеме ОЭ. При таком способе можно подключать нагрузку с большим напряжением питания, чем питание микроконтроллера. Резистор на базе – ограничительный. Может варьироваться в широких пределах (1-10 кОм), в любом случае транзистор будет работать в режиме насыщения. Транзистор может быть любой n-p-n транзистор. Коэффициент усиления, практически не имеет значения. Выбирается транзистор по току коллектора (нужный нам ток) и напряжению коллектор-эмиттер (напряжение которым запитывается нагрузка). Еще имеет значение рассеиваемая мощность — чтоб не перегрелся.
Из распространенных и легко доступных можно заюзать BC546, BC547, BC548, BC549 с любыми буквами (100мА), да и тот-же КТ315 сойдет (это у кого со старых запасов остались).
BC547.pdf (10479 Загрузок)
1.3 Подключение нагрузки при помощи полевого транзистора.
Ну а если ток нашей нагрузки лежит в пределах десятка ампер? Биполярный транзистор применить не получиться, так как токи управления таким транзистором велики и скорей всего превысят 20мА. Выходом может служить или составной транзистор (читать ниже) или полевой транзистор (он же МОП, он же MOSFET). Полевой транзистор просто замечательная штука, так как он управляется не током, а потенциалом на затворе. Это делает возможным микроскопическим током на затворе управлять большими токами нагрузки.
Для нас подойдет любой n-канальный полевой транзистор. Выбираем, как и биполярный, по току, напряжению и рассеиваемой мощности.
Выбираем, как и биполярный, по току, напряжению и рассеиваемой мощности.
При включении полевого транзистора нужно учесть ряд моментов:
— так как затвор, фактически, является конденсатором, то в моменты переключения транзистора через него текут большие токи (кратковременно). Для того чтобы ограничить эти токи в затвор ставиться ограничивающий резистор.
— транзистор управляется малыми токами и если выход микроконтроллера, к которому подключен затвор, окажется в высокоимпедансном Z-состоянии полевик начнет открываться-закрываться непредсказуемо, вылавливая помехи. Для устранения такого поведения ножку микроконтроллера нужно «прижать» к земле резистором порядка 10кОм.
У полевого транзистора на фоне всех его положительных качеств есть недостаток. Платой за управление малым током является медлительность транзистора. ШИМ, конечно, он потянет, но на превышение допустимой частоты он Вам ответит перегревом.
Для применения можно порекомендовать мощные транзисторы IRF630, IRF640. Их часто используют и поэтому их легко достать.
IRF640.pdf (17669 Загрузок)
1.4 Подключение нагрузки при помощи составного транзистора Дарлингтона.
Альтернативой применения полевого транзистора при сильноточной нагрузке является применение составного транзистора Дарлингтона. Внешне это такой-же транзистор, как скажем, биполярный, но внутри для управления мощным выходным транзистором используется предварительная усилительная схема. Это позволяет малыми токами управлять мощной нагрузкой. Применение транзистора Дарлингтона не так интересно, как применение сборки таких транзисторов. Есть такая замечательная микросхема как ULN2003. В ее составе аж 7 транзисторов Дарлингтона, причем каждый можно нагрузить током до 500мА, причем их можно включать параллельно для увеличения тока.
Микросхема очень легко подключается к микроконтроллеру (просто ножка к ножке) имеет удобную разводку (вход напротив выхода) и не требует дополнительной обвязки. В результате такой удачной конструкции ULN2003 широко используется в радиолюбительской практике. Соответственно достать ее не составит труда.
В результате такой удачной конструкции ULN2003 широко используется в радиолюбительской практике. Соответственно достать ее не составит труда.
ULN2003.pdf (19340 Загрузок)
2 НАГРУЗКА ПЕРЕМЕННОГО ТОКА.
Если Вам нужно управлять устройствами переменного тока (чаще всего 220v), то тут все сложней, но не на много.
2.1 Подключение нагрузки при помощи реле.
Самым простым и, наверное, самым надежным есть подключение при помощи реле. Катушка реле, сама собой, является сильноточной нагрузкой, поэтому напрямую к микроконтроллеру ее не включишь. Реле можно подключить через транзистор полевой или биполярный или через туже ULN2003, если нужно несколько каналов.
Достоинства такого способа большой коммутируемый ток (зависит от выбранного реле), гальваническая развязка. Недостатки: ограниченная скорость/частота включения и механический износ деталей.
Что-то рекомендовать для применения не имеет смысла — реле много, выбирайте по нужным параметрам и цене.
2.2 Подключение нагрузки при помощи симистора (триака).
Если нужно управлять мощной нагрузкой переменного тока а особенно если нужно управлять мощностью выдаваемой на нагрузку (димеры), то Вам просто не обойтись без применения симистора (или триака). Симистор открывается коротким импульсом тока через управляющий электрод (причем как для отрицательной, так и для положительной полуволны напряжения). Закрывается симистор сам, в момент отсутствия напряжения на нем (при переходе напряжения через ноль). Вот тут начинаются сложности. Микроконтроллер должен контролировать момент перехода через ноль напряжения и в точно определенный момент подавать импульс для открытия симистора — это постоянная занятость контроллера. Еще одна сложность это отсутствие гальванической развязки у симистора. Приходится ее делать на отдельных элементах усложняя схему.
Хотя современные симисторы управляются довольно малым током и их можно подключить напрямую (через ограничительный резистор) к микроконтроллеру, из соображений безопасности приходится их включать через оптические развязывающие приборы.
 Причем это касается не только цепей управления симистором, но и цепей контроля нуля.
Причем это касается не только цепей управления симистором, но и цепей контроля нуля.Довольно неоднозначный способ подключения нагрузки. Так как с одной стороны требует активного участия микроконтроллера и относительно сложного схемотехнического решения. С другой стороны позволяет очень гибко манипулировать нагрузкой. Еще один недостаток применения симисторов — большое количество цифрового шума, создаваемого при их работе — нужны цепи подавления.
Симисторы довольно широко используются, а в некоторых областях просто незаменимы, поэтому достать их не составляет каких либо проблем. Очень часто в радиолюбительстве применяют симисторы типа BT138.
BT138.pdf (6563 Загрузки)
2.3 Подключение нагрузки при помощи твердотельного реле.
С недавних пор у радиолюбителей появилась очень замечательная штука — твердотельные реле. Представляют они из себя оптические приборы (еще их называют оптореле), с одной стороны, в общем случае, стоит светодиод, а с другой полевой транзистор со светочувствительным затвором. Управляется эта штука малым током, а манипулировать может значительной нагрузкой.
Подключать твердотельное реле к микроконтроллеру очень просто — как светодиод — через резистор.
Достоинства налицо: малые размеры, отсутствие механического износа, возможность манипулировать большим током и напряжением и самое главное оптическая развязка от опасного напряжения. Нагрузка может быть как постоянного, так и переменного тока в зависимости от конструкции реле. Из недостатков следует отметить относительную медлительность (чаще всего для коммутации используется полевик) и довольно значительную стоимость реле.
Если не гнаться за завышенными характеристиками можно подобрать себе прибор по приемлемой цене. Например, реле CPC1030N управляется током от 2мА, при этом способно коммутировать нагрузку переменного и постоянного тока 120мА и 350v (очень полезная для радиолюбителей вещь!)
CPC1030N.pdf (14445 Загрузок)
(Visited 149 932 times, 21 visits today)
Сварочный аппарат с фазным управлением тиристорами на микроконтроллере PIC16F876
С самого начала идея была сделать сварочный аппарат, в котороммикроконтроллер будет лишь косвенно рулить сварочными делами (фазноеуправление тиристорами хотел сделать на микросхеме), обеспечиватьплавный пуск трансформатора и защищать от перегрева силовые элементы.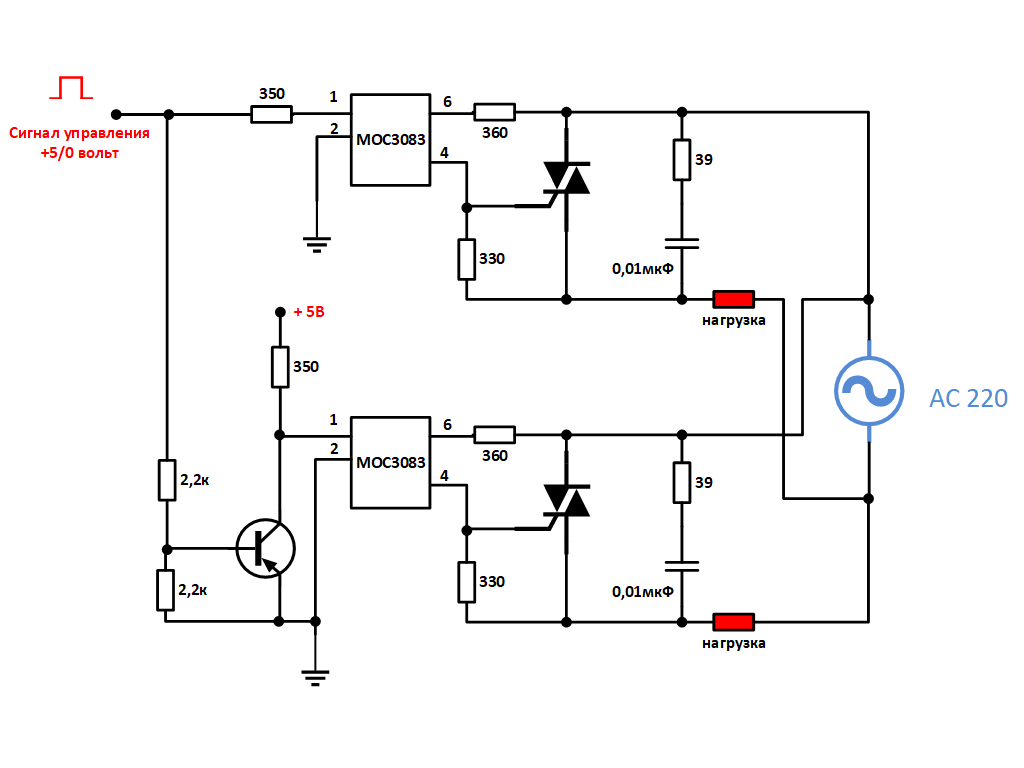 Уже в процессе создания пришла мысль: «А что если реализоватьфазное управление программно…”. Несколько»пугала” многофункциональность, возлагаемая намикроконтроллер, но решил дерзнуть. В итоге получился очень надёжныйсварочный аппарат постоянного тока, который вот уже год неустанноработает.
Уже в процессе создания пришла мысль: «А что если реализоватьфазное управление программно…”. Несколько»пугала” многофункциональность, возлагаемая намикроконтроллер, но решил дерзнуть. В итоге получился очень надёжныйсварочный аппарат постоянного тока, который вот уже год неустанноработает.
Фото сварочного аппарата (справа тиристорый, слева — его младшийбратишка — инвертор):
Мой сварочный трансформатор намотан так, что работает на гранинасыщения магнитопровода. Общеизвестно, что при такой намотке великпусковой ток (настолько, что выбивает автоматы защиты). Поэтому, вмомент включения питания первичная обмотка трансформатора подключаетсячерез резистор на 20 Ом, а спустя 0,5 сек. включается реле и егоконтакты шунтируют резистор. В момент задержки тиристоры закрыты, и токв сварочную дугу не подаётся. На индикацию выводится надпись»дуга”.
В основу регулирования сварочного токаположенпринцип управленияфазой открытия тиристоров. В момент перехода сетевого напряжения черезноль с выхода компаратора (выв.7 LM358N) на вход INT микроконтроллерапоступает импульс логического нуля, что вызывает прерывание. В ПП Intобработки этого прерывания запускается таймер TMR2 и сбрасывается RA5.Переполнение TMR2 приводит к другому прерыванию, в котором на выводеRA5 появляется высокий логический уровень, который открываеттранзисторы и тиристор соответствующей полуволны сетевого напряжения. Врезультате, изменяя значение регистра PR2 (период таймера TMR2),можноуправлять фазой открытия тиристоров, а соответственно и сварочным током.
Схема сварочного аппарата представлена на рисунке:
Значение сварочного тока контроллер неотслеживает.Дело в том, что сварочная дуга – это сложный физическийпроцесс,с непредсказуемой ВАХ. Во время сварки при одной и той же фазе открытиятиристоров ток в дуге может изменяться в разы! Это зависит в первуюочередь от длины дуги. По этому программно задаётся только фазаоткрытия тиристоров без обратной связи по току. А чтобы сварщику, неимеющему представления о фазе, регулировать сварочный ток на индикациювыводится некое процентное значение мощности. С помощью кнопок сварщикможет менять выходную мощность аппарата от 10 до 100 %. Программнопредусмотрен также автодекремент (автоинкремент), при нажатии на однуиз кнопок дольше 2 секунд происходит автоматическое быстрое уменьшение(увеличение) процентного значения мощности. С помощью применённых мноюсиловых элементов аппарата удалось получить ток в дуге до 250 А приустановленном 100% значении мощности.
С помощью кнопок сварщикможет менять выходную мощность аппарата от 10 до 100 %. Программнопредусмотрен также автодекремент (автоинкремент), при нажатии на однуиз кнопок дольше 2 секунд происходит автоматическое быстрое уменьшение(увеличение) процентного значения мощности. С помощью применённых мноюсиловых элементов аппарата удалось получить ток в дуге до 250 А приустановленном 100% значении мощности.
Если нажать на две кнопки одновременно,то вэнергонезависимую память запишется текущее процентное значениемощности, с выводом на индикацию слова «АГА” икратковременным включением зуммера. При следующем включении аппаратаэта мощность будет по умолчанию.
Самым слабым звеном силовой частисварочногоаппарата оказался дроссель. Сам я его не изготавливал, взял тот, чтобыл в наличии. Он намотан медным проводом в термостойкой изоляции, асечение всего 16 кв. мм. Хоть я и направил на него вентилятор обдува(на схеме не показан), при больших токах он всё же греется больше всегоостального. С целью недопущения перегрева к обмотке дросселя приклеентермодатчик DS1820. При превышении температуры выше 100 градусов, аточнее спустя 20 секунд после непрерывного превышения этого порогамикроконтроллер прекращает выдавать управляющие импульсы на тиристоры,включается прерывистый звуковой сигнал (зуммер). На индикацию выводитсятекущее значение температуры обмотки дросселя. Как только температураобмотки понизится до 50 градусов, сварочный аппарат переходит в рабочийрежим и можно продолжать варить.
Вид на монтаж сварочного аппарата представлен на фото:
сть недостаток схемы, не создающийнеудобств вработе. В связи с тем, что питание микроконтроллера не защищено отвсяческого рода помех (более того, блок управления не экранирован отсиловой части) происходит периодический сброс программы на начало(выключение реле, вывод на индикацию слова «дуга”,включение реле спустя 0,5 сек). Это происходит с непредсказуемыминтервалом (зависит от времени суток) и только на холостом ходу (безнагрузки). Поэтому, на нервы сварщика это не действует :). Тем неменее, нерегламентированные сбросы следует устранять. Считаю, что мойсварочник может послужить отличным полигоном для испытания всевозможныхметодов защиты от помех по питанию.
Поэтому, на нервы сварщика это не действует :). Тем неменее, нерегламентированные сбросы следует устранять. Считаю, что мойсварочник может послужить отличным полигоном для испытания всевозможныхметодов защиты от помех по питанию.
Прошивка для микроконтроллера PIC16F876 в HEX формате : duga.rar
Та-же прошивка в формате программы ProgCode : duga.sfr
Автор конструкции: Руслан Липин
Связаться с автором можно по email (указан на схеме)
Задать автору вопросы по конструкции так-же возможно в форуме.
Модернизация платы СИФУ
Модернизация платы СИФУ
Эта не обычная работа и заключается в модернизации фазового регулятора, скорости вращения двигателя постоянного тока на большую мощность.
Необычность заключается в том, что заказчик на отрез отказался от предложения применить микроконтроллер, мотивируя это стереотипами из разряда аналоговый регулятор надежнее, процессоры зависают и т.д.
Обычно в таких случаях я применяю STM32F103 с подходящим количеством выводов, 72мГц тактовая частота, наличие двух АЦП, большое количество ОЗУ делает этот МК идеальным вариантом.
Задача фазового регулирования (СИФУ) довольно проста, после перехода полупериода через ноль, нужно открыть тиристор с некоторой задержкой. Задержка, или правильно сказать угол открытия тиристора, по сути, обратно пропорциональная величина выходной мощности. Называется это альфа регулятор или регуляторы, так как их три, по одному на каждую фазу. Управляем мы шестью тиристорами, включенными по схеме мост Ларионова.
Применения МК сильно упрощает схему, позволяет отказаться от большого числа операционных усилителей, транзисторов и пассивных компонентов.
Быстрый АЦП позволяет сделать “умный детектор” перехода через ноль, по сути, мы можем перейти в векторную форму управления и открывать тиристоры в нужные моменты времени.
Также МК позволяет расширить возможности управления скоростью, что является первостепенной задачей, мы можем сделать любой ПИД – регулятор, с блокировками, плавным стартом, нелинейной характеристикой управления, что сделать обычными дискретными компонентами очень трудно.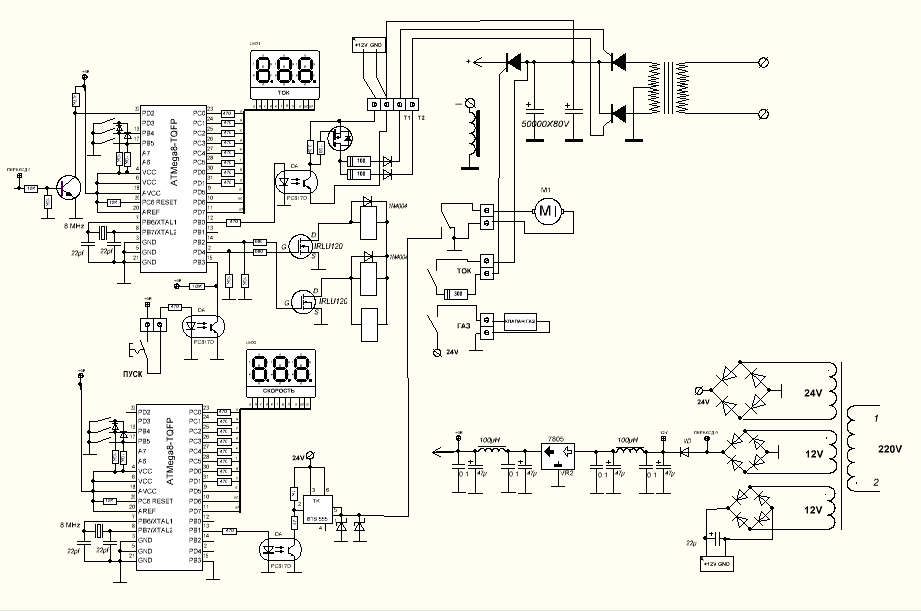
Объяснения, что со времен комплекта КР580 многое поменялось, и на микроконтроллере будет технологичнее и надежней, не возымели действия, ответ был один: нужно как есть, такая же точно плата, но на современной элементной базе. Вдруг будет сбоить, как с ними работать, персонал не хочет изучать и т. д.
Собственно ТЗ было озвучено, единственной трудностью было отсутствие схем, точнее сказать схемы были, но несколько вариантов с правками различных людей, которые эксплуатировали это оборудование на протяжении 30 лет. Пример на фото:
Понять какой вариант является актуальным невозможно, поэтому заказчик предоставил рабочую плату, с которой пришлось срисовывать и перепроверять всю схему.
Работа не очень сложная, но очень кропотливая, также были трудности с подбором аналогов некоторых микросхем, в частности микросхемы К511ЛА5 – это специфическая серия ДТЛ, которая якобы обладает повышенной помехозащищенностью и использовалась в приводе.
Может это и так, но прямых современных аналогов К511ЛА5 нет, поэтому была выбрана микросхема CD4011. Пришлось, немного переделать схему, а также уделить особое внимание разводке и блокировочным конденсаторам.
После того как схема была уточнена, была построена модель для проверки работоспособности альфа регулятора.
Принципиальная схема:
И собственно печатная плата:
Обычно перед заказом платы на производстве я изготавливаю полноценный макет методом пленочного фоторезиста, это быстрее и позволяет исключить ошибки перед серийным заказом. В данном случае из-за большого размера было принято решение заказывать плату на производстве сразу, без предварительного изготовления макета.
Результат ниже в стиле было – стало!
Также в ТЗ входило разработать индикатор напряжения 0- 10В, на пять каналов с возможностью с возможностью пересчета показаний, обороты – вольты. Результат ниже, был изготовлен и отлажен прототип.
Вы можете заказать разработку электроники, подробнее смотрите здесь: Разработка электроники, Монтаж шкафов, Проектные работы.
Наши Контакты, обращайтесь на почту или по телефону, предложим решение или бесплатно проконсультируем.
Схема тиристорного устройствоа плавного пуска асинхронного электродвигателя
Александр Ситников (Кировская обл.)
Рассматриваемая в статье схема позволяет осуществить безударный пуск и торможение электродвигателя, увеличить срок службы оборудования и снизить нагрузку на электросеть. Плавный пуск достигается путём регулирования напряжения на обмотках двигателя силовыми тиристорами.
Устройства плавного пуска (УПП) широко применяются в различных электроприводах. Структурная схема разработанного УПП приведена на рисунке 1, а диаграмма работы УПП – на рисунке 2. Основой УПП являются три пары встречно-параллельных тиристоров VS1 – VS6, включенных в разрыв каждой из фаз. Плавный пуск осуществляется за счёт постепенного
увеличения прикладываемого к обмоткам электродвигателя сетевого напряжения от некоторого начального значения Uначдо номинального Uном. Это достигается путём постепенного увеличения угла проводимости тиристоров VS1 – VS6 от минимального значения до максимального в течение времени Тпуск, называемого временем пуска.
Обычно значение Uначсоставляет 30…60% от Uном, поэтому пусковой момент электродвигателя существенно меньше, чем в случае подключения электродвигателя на полное напряжение сети. При этом происходит постепенное натяжение приводных ремней и плавное зацепление зубчатых колес редуктора. Это благоприятно сказывается на снижении динамических нагрузок электропривода и, как следствие, способствует продлению срока службы механизмов и увеличению интервала между ремонтами.
Применение УПП также позволяет снизить нагрузку на электросеть, поскольку в этом случае пусковой ток электродвигателя составляет 2 – 4 номинала тока двигателя, а не 5 – 7 номиналов, как при непосредственном пуске. Это важно при питании электроустановок от источников энергии ограниченной мощности, например, дизель-генераторных установок, источников бесперебойного питания и трансформаторных подстанций малой мощности
(особенно в сельской местности). После завершения пуска тиристоры шунтируются байпасом (обходным контактором) К, благодаря чему в течение времени Траб на тиристорах не рассеивается мощность, а значит, экономится электроэнергия.
При торможении двигателя процессы происходят в обратном порядке: после отключения контактора К угол проводимости тиристоров максимален, напряжение на обмотках электродвигателя равно сетевому за вычетом падения напряжения на тиристорах. Затем угол проводимости тиристоров в течение времени Тторм уменьшается до минимального значения, которому соответствует напряжение отсечки Uотс, после чего угол проводимости тиристоров становится равным нулю и напряжение на обмотки не подается. На рисунке 3 приведены диаграммы тока одной из фаз двигателя при постепенном увеличении угла проводимости тиристоров.
На рисунке 4 приведены фрагменты принципиальной электрической схемы УПП. Полностью схема приведена на сайте журнала. Для её работы требуется напряжение трех фаз А, В, С стандартной сети 380 В частотой 50 Гц. Обмотки электродвигателя при этом могут быть соединены как «звездой», так и „треугольником“.
В качестве силовых тиристоров VS1 – VS6 применены недорогие приборы типа 40TPS12 в корпусе ТО-247 с прямым током Iпр= 35 А. Допустимый ток через фазу составляет Iдоп= 2Iпр= 70 А. Будем считать, что максимальный пусковой ток составляет 4Iном, откуда следует, что Iном < Iдоп/4 = 17,5 А. Просматривая стандартный ряд мощностей электродвигателей, находим, что к УПП допустимо подключать двигатель мощностью 7,5 кВт с номинальным током фазы Iн= 15 А. В случае, если пусковой ток превысит Iдоп (по причине подключения двигателя большей мощности или слишком малого времени пуска), процесс пуска будет остановлен, поскольку сработает автоматический выключатель QF1 со специально подобранной характеристикой.
Параллельно тиристорам подключены демпфирующие RC-цепочки R48, C20, C21, R50, C22, C23, R52, C24, C25, предотвращающие ложное включение тиристоров, а также варисторы R49, R51 и R53, поглощающие импульсы перенапряжения свыше 700 В. Обходные реле К1, К2, К3 типа TR91-12VDC-SC-C с номинальным током 40 А шунтируют силовые тиристоры после завершения пуска.
Питание системы управления осуществляется от трансформаторного блока питания, запитанного от межфазного напряжения Uав. В блок питания входят понижающие трансформаторы TV1, TV2, диодный мост VD1, токоограничивающий резистор R1, сглаживающие конденсаторы С1, С3, С5, помехоподавляющие конденсаторы С2, С4, С6 и линейные стабилизаторы DA1 и DA2, обеспечивающие напряжение 12 и 5 В соответственно.
Система управления построена с применением микроконтроллера DD1 типа PIC16F873. Микроконтроллер выдаёт импульсы управления тиристорами VS1 – VS6 путём «зажигания» оптосимисторов ОРТ5-ОРТ10 (MOC3052). Для ограничения тока в цепях управления тиристоров VS1 – VS6 служат резисторы R36 – R47. Импульсы управления подаются одновременно на два тиристора с задержкой относительно начала полуволны межфазного напряжения. Цепи синхронизации с сетевым напряжением состоят из трёх однотипных узлов, состоящих из зарядных резисторов R13, R14, R18, R19, R23, R24, диодов VD3 – VD8, транзисторов VT1 – VT3, накопительных конденсаторов С17 – С19 и оптопар OPT2 – OPT4. C выхода 4 оптопар OPT2, OPT3, OPT4 на входы микроконтроллера RC2, RC1, RC0 поступают импульсы длительностью примерно 100 мкс, соответствующие началу отрицательной полуволны фазных напряжений Uab, Ubc, Uca.
Диаграммы работы узла синхронизации приведены на рисунке 5. Если принять верхний график за сетевое напряжение Uав, то среднийграфик будет соответствовать напряжению на конденсаторе С17, а нижний – току через фотодиод оптопары ОРТ2. Микроконтроллер регистрирует поступающие на его входы синхроимпульсы, определяет наличие, порядок чередования, отсутствие «слипания» фаз, а также производит расчёт времени задержки импульсов управления тиристорами. Входы цепей синхронизации защищены от перенапряжения варисторами R17, R22 и R27.
С помощью потенциометров R2, R3, R4 задаются параметры, соответствующие диаграмме работы УПП, приведённой на рисунке 2; соответственно R2 – Tпуск, R3 – Тторм, R4 – Uначи Uотс. Напряжения уставок с движков R2, R3, R4 поступают на входы RA2, RA1, RA0 микросхемы DD1 и преобразуются с помощью АЦП. Время пуска и торможения регулируется в пределах от 3 до 15 с, а начальное напряжение – от нуля до напряжения, соответствующего углу проводимости тиристора в 60 электрических градусов. Конденсаторы С8 – С10 – помехоподавляющие.
Команда «ПУСК» подаётся путём замыкания контактов 1 и 2 разъёма XS2, при этом на выходе 4 оптопары OPT1 появляется лог. 1; конденсаторы С14 и С15 производят подавление колебаний, возникающих вследствие „дребезга“ контактов. Разомкнутому положению контактов 1 и 2 разъёма XS2 соответствует команда „СТОП“. Коммутацию цепи управления запуском можно реализовать кнопкой с фиксацией, тумблером или контактами реле.
Силовые тиристоры защищены от перегрева термостатом B1009N с нормально-замкнутыми контактами, размещёнными на теплоотводе. При достижении температуры 80°С контакты термостата размыкаются, и на вход RC3 микроконтроллера поступает уровень лог. 1, свидетельствующий о перегреве.
Светодиоды HL1, HL2, HL3 служат индикаторами следующих состояний:
- HL1 (зелёный) «Готовность» – отсутствие аварийных состояний, готовность к запуску;
- HL2 (зелёный) «Работа» – мигающий светодиод означает, что УПП производит пуск или торможение двигателя, постоянное свечение – работа на байпасе;
- HL3 (красный) «Авария» – свидетельствует о перегреве теплоотвода, отсутствии или „слипании“ фазных напряжений.
Включение обходных реле К1, К2, К3 производится путём подачи микроконтроллером лог. 1 на базу транзистора VT4.
Программирование микроконтроллера – внутрисхемное, для чего используется разъём XS3, диод VD2 и микропереключатель Дж1. Элементы ZQ1, C11, C12 образуют цепь запуска тактового генератора, R5 и С7 – цепь сброса по питанию, С13 осуществляет фильтрацию помех по шинам питания микроконтроллера.
На рисунке 6 приведён упрощённый алгоритм работы УПП. После инициализации микроконтроллера вызывается подпрограмма Error_Test, которая определяет наличие аварийных ситуаций: перегрев теплоотвода, невозможность синхронизироваться с сетевым напряжением вследствие потери фазы, неверного подключения к сети или сильных помех. Если аварийная ситуация не фиксируется, то переменной Error присваивается значение «0», после возврата из подпрограммы зажигается светодиод „Готовность“, и схема переходит в режим ожидания команды „ПУСК“. После регистрации команды „ПУСК“ микроконтроллер производит аналого!цифровое преобразование напряжений уставок
на потенциометрах и расчёт параметров Тпуск и Uнач, после чего выдаёт импульсы управления силовыми тиристорами. По окончании пуска включается байпас. При торможении двигателя процессы управления выполняются в обратном
порядке.
Способы и схемы управления тиристором или симистором — АльфаМастер
Тиристоры нашли широкое применение в полупроводниковых устройствах и преобразователях. Различные источники питания, частотные преобразователи, регуляторы, возбудительные устройства для синхронных двигателей и много других устройств строились на тиристорах, а в последнее время их вытесняют преобразователи на транзисторах. Основной задачей для тиристора является включение нагрузки в момент подачи управляющего сигнала. В этой статье мы рассмотрим, как управлять тиристорами и симисторами.
Определение
Тиристор (тринистор) — это полупроводниковый полууправляемый ключ. Полууправляемый — значит, что вы можете только включать тиристор, отключается он только при прерывании тока в цепи или если приложить к нему обратное напряжение.
Он, подобно диоду, проводит ток только в одном направлении. То есть для включения в цепь переменного тока для управления двумя полуволнами нужно два тиристора, для каждой по одному, хотя не всегда. Тиристор состоит из 4 областей полупроводника (p-n-p-n).
Другой подобный прибор называется симистор — двунаправленный тиристор. Его основным отличием является то, что ток он может проводить в обе стороны. Фактически он представляет собой два тиристора соединённых параллельно навстречу друг другу.
Основные характеристики
Как и любых других электронных компонентов у тиристоров есть ряд характеристик:
- Падение напряжения при максимальном токе анода (VT или Uос).
- Прямое напряжение в закрытом состоянии (VD(RM) или Uзс).
- Обратное напряжение (VR(PM) или Uобр).
- Прямой ток (IT или Iпр) – это максимальный ток в открытом состоянии.
- Максимально допустимый прямой ток (ITSM) — это максимальный пиковый ток в открытом состоянии.
- Обратный ток (IR) — ток при определенном обратном напряжении.
- Постоянный ток в закрытом состоянии при определенном прямом напряжении (ID или Iзс).
- Постоянное отпирающее напряжение управления (VGT или UУ).
- Ток управления (IGT).
- Максимальный ток управления электрода IGM.
- Максимально допустимая рассеиваемая мощность на управляющем электроде (PG или Pу)
Принцип работы
Когда на тиристор подают напряжение он не проводит ток. Есть два способа включит его – подать напряжение между анодом и катодом достаточное для открытия, тогда его работа ничем не будет отличаться от динистора.
Другой способ – это подать кратковременный импульс на управляющий электрод. Ток открытия тиристора лежит в пределах 70-160 мА, хотя на практике эта величина, как и напряжение которое нужно приложить к тиристору зависит от конкретной модели и экземпляра полупроводникового прибора и даже от условий, в которых он работает, таких, например, как температура окружающей среды.
Кроме управляющего тока, есть такой параметр как ток удержания — это минимальный ток анода для удержания тиристора в открытом состоянии.
После открытия тиристора управляющий сигнал можно отключать, тиристор будет открыт до тех пор, пока через него протекает прямой ток и подано напряжение. То есть в цепи переменного тиристор будет открыт в течении той полуволны напряжение которой смещает тиристор в прямом направлении. Когда напряжение устремится к нулю, снизится и ток. Когда ток в цепи упадет ниже величины тока удержания тиристора — он закроется (выключится).
Полярность управляющего напряжения должна совпадать с полярностью напряжения между анодом и катодом, что вы наблюдаете на осциллограммах выше.
Управление симистором аналогично хоть и имеет некоторые особенности. Для управления симистором в цепи переменного тока нужно два импульса управляющего напряжения — на каждую полуволну синусоиды соответственно.
После подачи управляющего импульса в первой полуволне (условно положительной) синусоидального напряжения ток через симистор будет протекать до начала второй полуволны, после чего он закроется, как и обычный тиристор. После этого нужно подать еще один управляющий импульс для открытия симистора на отрицательной полуволне. Это наглядно проиллюстрировано на следующих осциллограммах.
Полярность управляющего напряжения должна соответствовать полярности приложенного напряжения между анодом и катодом. Из-за этого возникают проблемы при управлении симисторами с помощью цифровых логических схем или от выходов микроконтроллера. Но это легко решается путем установки симисторного драйвера, о чем мы поговорим позже.
Распространенные схемы управления тиристорами или симисторами
Самой распространенной схемой является симисторный или тиристорный регулятор.
Здесь тиристор открывается после того как на конденсаторе будет достаточная величина для его открытия. Момент открытия регулируется с помощью потенциометра или переменного резистора. Чем больше его сопротивление — тем медленнее заряжается конденсатор. Резистор R2 ограничивает ток через управляющий электрод.
Эта схема регулирует оба полупериода, то есть вы получаете полную регулировку мощности почти от 0% и почти до 100%. Это удалось достичь, установив регулятор в диодном мосте, таким образом регулируется одна из полуволн.
Упрощенная схема изображена ниже, здесь регулируется лишь половина периода, вторая полуволна проходит без изменения через диод VD1. Принцип работы аналогичен.
Симисторный регулятор без диодного моста позволяет управлять двумя полуволнами.
По принципу действия почти аналогична предыдущим, но построена на симисторе с её помощью регулируются уже обе полуволны. Отличия заключаются в том, что здесь импульс управления подаётся с помощью двунаправленного динистора DB3, после того как конденсатор зарядится до нужного напряжения, обычно это 28-36 Вольт. Скорость зарядки также регулируется переменным резистором или потенциометром. Такая схема реализована в большинстве бытовых диммеров.
Интересно:
Такие схемы регулировки напряжения называется СИФУ — система импульсного фазового управления.
На рисунке выше изображен вариант управления симистором с помощью микроконтроллера, на примере популярной платформы Arduino. Симисторный драйвер состоит из оптосимистора и светодиода. Так как в выходной цепи драйвера установлен оптосимистор на управляющий электрод всегда подаётся напряжение нужной полярности, но здесь есть некоторые нюансы.
Дело в том, что для регулировки напряжения с помощью симистора или тиристора нужно подавать управляющий сигнал в определенный момент времени, так чтобы срез фазы происходил до нужной величины. Если наугад стрелять управляющими импульсами — схема работать конечно будет, но регулировок добиться не выйдет, поэтому нужно определять момент перехода полуволны через ноль.
Так как для нас не имеет значения полярность полуволны в настоящий момент времени — достаточно просто отслеживать момент перехода через ноль. Такой узел в схеме называют детектор нуля или нуль-детектор, а в англоязычных источниках «zero crossing detector circuit» или ZCD. Вариант такой схемы с детектором перехода через ноль на транзисторной оптопаре выглядит следующим образом:
Оптодрайверов для управления симисторами есть множество, типовые – это линейка MOC304x, MOC305x, MOC306X, произведенные компанией Motorola и другими. Более того – эти драйверы обеспечивают гальваническую развязку, что убережет ваш микроконтроллер в случае пробоя полупроводникового ключа, что вполне возможно и вероятно. Также это повысит безопасность работы с цепями управления, полностью разделив цепь на «силовую» и «оперативную».
Заключение
Мы рассказали базовые сведения о тиристорах и симисторах, а также управлении ими в цепях с «переменкой». Стоит отметить, что мы не затрагивали тему запираемых тиристоров, если вас интересует этот вопрос – пишите комментарии и мы рассмотрим их подробнее. Также не были рассмотрены нюансы использования и управления тиристорами в силовых индуктивных цепях. Для управления «постоянкой» лучше использовать транзисторы, поскольку в этом случае вы решаете, когда ключ откроется, а когда он закроется, повинуясь управляющему сигналу…
Управление мощностью переменного токас тиристором с помощью микроконтроллера pic
Управление мощностью переменного токас помощью тиристора с использованием микроконтроллера pic предназначено для управления потоком мощности переменного тока через нагрузку. Этот проект разработан с использованием микроконтроллера PIC16F877A и схемы обнаружения пересечения нуля. Для регулирования мощности переменного тока с помощью тиристора используется метод контроля фазового угла. Тиристор используется как переключатель для управления потоком энергии. Микроконтроллер PIC16F877A используется для обнаружения пересечения нуля и генерации импульсных сигналов под определенным углом для тиристора.
Регулятор мощности переменного тока с тиристором
Начнем с базового понимания управления мощностью переменного тока с помощью тиритора. Например, если нагрузка подключена к источнику переменного тока через переключатель, как показано на рисунке ниже. Симистор используется как переключатель. Симистор – это разновидность тирситора. В симисторе два встречных тиристора соединены друг с другом.
Поток мощности переменного тока на нагрузку можно контролировать, управляя среднеквадратичным значением напряжения, возникающего на нагрузке, как показано на рисунке выше.Этот метод также называется методом регулятора напряжения переменного тока. В контроллере переменного напряжения среднеквадратичное значение напряжения, возникающего на нагрузке, регулируется путем изменения угла срабатывания сигнала затвора симистора, как показано на рисунке выше. Как вы знаете мощность в цепях переменного тока, мощность (активная мощность) рассчитывается по следующей формуле:
P = V × I × cos (θ), где cos (θ) – коэффициент мощности
Чтобы упростить этот проект, мы использовали только резистивную нагрузку. Внеся небольшие изменения в код, вы также можете использовать его с индуктивными нагрузками.В резистивных нагрузках коэффициент мощности всегда равен единице. Итак, cos (θ) = 1 и приведенная выше формула становится:
P = V × I = V × V / R = V² / R
P = V² / R
Итак, согласно приведенной выше формуле мощность на нагрузке прямо пропорциональна квадрату напряжения. Управляя напряжением на нагрузке, можно также рассчитать мощность. Как я уже упоминал ранее, контроллеры напряжения переменного тока используются для управления среднеквадратичным значением напряжения на нагрузках. Цепи регулятора напряжения переменного тока находят множество применений в промышленности, например переключатели ответвлений в трансформаторах, индукционный нагрев, регулирование скорости асинхронного двигателя и управление освещением.
Типы регуляторов переменного напряжения
Для регулирования мощности переменного тока с помощью тиристора используются два типа регуляторов напряжения переменного тока. Краткое объяснение обоих из них дано ниже:
- Управление модуляцией с пропуском импульсов: В этом методе нагрузка подключается к источнику переменного тока на несколько циклов, а затем питание отключается на несколько циклов. Электропитание переменного тока контролируется регулированием угла зажигания тиристора.
- Управление фазовым углом: В методе управления фазовым углом нагрузки подключаются к источнику переменного тока для определенной части положительного и отрицательного цикла.Конкретная часть зависит от угла зажигания тиристора.
В проекте управления мощностью переменного тока с помощью тиристоров метод управления фазовым углом используется для управления потоком мощности через нагрузку путем управления напряжением.
Принципиальная схема регулирования мощности переменного тока с тиристором
Принципиальная схема управления мощностью переменного тока с тиристором с помощью микроконтроллера pic. Я также сделал необходимые комментарии к рисунку.
МикроконтроллерPIC16F877A используется для обнаружения пересечения нуля переменного напряжения, а микроконтроллер PIC16F877A генерирует импульс для симистора с определенной задержкой после обнаружения пересечения нуля.Я также опубликовал статью об обнаружении пересечения нуля с помощью микроконтроллера PIC16F877A. Для получения дополнительных сведений об обнаружении пересечения нуля ознакомьтесь со следующей статьей:
Обнаружение пересечения нуля с помощью микроконтроллера pic
В этом проекте я использовал задержку 2 мс. Что это значит? Это означает, что микроконтроллер будет генерировать импульс после обнаружения пересечения нуля с задержкой 2 мс. Вы можете настроить задержку вручную, введя ее значение в коде, или вы также можете использовать переменный резистор для регулировки значения задержки с помощью аналого-цифрового преобразователя микроконтроллера PIC16F877A.В приведенной выше принципиальной схеме управления мощностью переменного тока с помощью тирситора не задействовано слишком много науки. Сначала микроконтроллер проверяет обнаружение пересечения нуля, а затем срабатывает угол симистора с задержкой 2 мс после обнаружения пересечения нуля.
Управление мощностью переменного тока с тиристорной программой
Код проекта контроллера питания переменного тока написан с использованием компилятора Mikro C. Просто поместите этот код в компилятор mikro C после создания нового проекта. В этом проекте используется Crsytal 11,059 МГц.
Необходимые комментарии также сделаны в приведенном выше коде.Код для управления питанием переменного тока не требует пояснений, но если вы все еще чувствуете какую-либо проблему, не стесняйтесь комментировать этот пост со своими проблемами.
Разработка и реализация управления зажиганием на базе микроконтроллера At Mega 328 для трехфазного выпрямителя с тиристорным управлением – IJERT
Разработка и реализация управления зажиганием на базе микроконтроллера At Mega 328 для трехфазного выпрямителя с тиристорным управлением
1Мр. Гангуль М.Р. 2Мр. Г.П. Джайн
PG Студент WIT, Солапур Ассистент профессора WIT, Солапур.
Аннотация
Проектирование, разработка, испытания и установка регулятора розжига для трехфазного тиристорного выпрямителя. В качестве контроллера стрельбы используется микроконтроллер AT Mega 328. Эта микросхема IC обеспечивает логический ввод и вывод, аналого-цифровое преобразование, таймер для отсчета задержки и различные векторы прерывания для синхронизации. Программный алгоритм состоит из обнаружения перехода напряжения синхронизации через ноль для начала отсчета периода. Запрограммирован специальный тест для контроля значения угла стрельбы.
Регулируемая мощность – фундаментальная предпосылка для различных секторов. Разработана схема управления углом зажигания на базе микроконтроллера с использованием микроконтроллера AT Mega 328 и сопутствующей аппаратной схемы. Основная идея состоит в том, чтобы добиться надежного и последовательного управления, которое приведет к повышению производительности преобразователя.
Разработана схема запуска трехфазного, 6-импульсного преобразователя переменного тока в постоянный, управляемого микроконтроллером AT Mega 328. Микроконтроллер будет генерировать шесть эквидистантных синхронизированных импульсов запуска для преобразователя, который находит применение в энергосистемах (передача высокого напряжения постоянного тока) и промышленных приводных системах.Контроллер должен измерять входное напряжение и генерировать требуемые шесть импульсов запуска независимо от изменения частоты сети, а также одинаково управлять углом задержки этих сигналов для управления выходным напряжением постоянного тока.
Ключевые слова: микроконтроллер, преобразователь переменного тока в постоянный, метод синхронизации, метод запуска затвора, двигатель постоянного тока.
Введение
Установка состоит из контроллера ATmega-328, ЖК-дисплея для отображения угла зажигания, транзисторной схемы кондиционирования, модуля главного выпрямителя и ввода от пользователя в виде аналогового
напряжение для регулировки угла зажигания.Интеграция этих модулей приведет к полностью управляемому преобразователю с превосходными характеристиками по сравнению с другими обычными методами управления.
Приложения силовой электроники охватывают всю область электроэнергетических систем, причем диапазон мощности этих приложений простирается от нескольких ВА / Вт до нескольких МВА / МВт. Основная задача силовой электроники – управлять и преобразовывать электрическую мощность из одной формы в другую. В случае преобразователей на основе SCR, стробирующий сигнал генерируется отдельной схемой запуска затвора.Эти сигналы используются для управления периодом проводимости SCR, который в конечном итоге регулирует выход или производительность силовых электронных преобразователей. Что касается схем запуска, то простые схемы запуска могут быть реализованы посредством R- или RC-цепи, но они зависят от характеристик запуска затвора используемых тиристоров, и их нельзя легко использовать в самопрограммируемых, автоматических системах или системах с управлением с обратной связью. Поскольку использование силовых электронных контроллеров неуклонно растет в промышленности, а также в энергосистемах, для конкретных приложений требуются различные типы контроллеров.В контроллере требуется, чтобы группа тиристоров или силовых полупроводниковых приборов переключалась в разные моменты переключения на разную длительность и в определенной последовательности. Для различных трехфазных преобразователей, например сдвоенных преобразователей, циклоконвертеров и рекуперативного реверсивного привода, может потребоваться от 12 до 36 таких устройств. Таким образом переключений большого нет. Использование этих силовых устройств с различными стратегиями управления с помощью простой схемы запуска становится практически невозможным. Более того, включение обратной связи и различных подходов к управлению для одной и той же нагрузки или систем привода требует интеллектуального контроллера.Поэтому становится необходимым использование усовершенствованных схем запуска. Некоторые модули силовых полупроводниковых устройств включают в себя привод затвора, а также схему защиты от переходных процессов. Такие коммерчески доступные модули называются интеллектуальными модулями или интеллектуальным питанием. Они включают в себя изоляцию ввода-вывода и схемы управления затвором, микрокомпьютерное управление,
Схема защиты и диагностики(для перегрузки по току, короткого замыкания, разомкнутой нагрузки, перегрузки и перенапряжения) и управляемый источник питания.В случае трехфазных преобразователей требуется шесть импульсов запуска для каждого тиристора. Поэтому генерация шести импульсов запуска и управление их задержкой, одинаково и одновременно, становится трудным при использовании обычных аналоговых и цифровых схем. Более того, эти схемы становятся сложными, и затрудняется надлежащий контроль в широком диапазоне.
Три оконечных тиристора с дополнительным оконечным затвором, анодом и катодом; используется для срабатывания тиристора под определенным углом, известного как пусковой механизм.Замечено, что в аналоговой схеме запуска схема запуска слишком сложна с множеством компонентов, что может привести к трудностям отладки, неравномерному разнесению соседних импульсов запуска и неточностям сдвига фазы. Следовательно, разработан цифровой триггерный механизм, который преодолевает ограничения аналоговой триггерной схемы. Программируемая последовательность импульсов с помощью контроллера ATMega-328 должна формироваться в желаемой последовательности в виде шести выходов порта микроконтроллера. Этими импульсными последовательностями можно управлять с помощью программного обеспечения для микроконтроллера.Эти управляемые импульсы будут использоваться через надлежащую изоляцию для запуска вентилей SCR, тем самым управляя выходом преобразователя. Синхронизация будет достигнута путем использования выборки из необработанного сигнала переменного тока, преобразования его в прямоугольный импульс и использования его для прерывания MCU. Управление углом зажигания достигается путем изменения аналогового напряжения (0-5 В), которое преобразуется АЦП ATmega-328 в цифровое значение, и это значение используется в качестве угла зажигания путем правильного математического расчета для запуска схемы преобразователя при желаемом угле зажигания. , тем самым управляя выходным напряжением.
Аппаратно-программная платформа
Оборудование
Аппаратное обеспечение состоит из трехфазного выпрямителя мощности, схемы синхронизации, схемы регулятора напряжения, схемы запуска затвора, схемы управления углом зажигания. Используется встроенная плата на базе микроконтроллера AVR, она состоит из контроллера ATMega-328, аналогового напряжения (0-5 В) для управления работой, ЖК-дисплея для отображения угла зажигания, транзисторной схемы согласования и модуля главного выпрямителя.
Рис. 1. Блок-схема трехфазного выпрямителя.
05 В управляющее напряжение
Для управления мощностью преобразователя используется аналоговое напряжение(0-5 В), АЦП микроконтроллера Atmega-328 имеет разрешение 10 бит. Аналоговое напряжение (0–5 В) преобразуется в счет (0–1023). Аналоговое напряжение подается на один из каналов порта АЦП. При изменении аналогового напряжения происходит изменение цифрового значения. Преобразование в АЦП занимает около 250 микросекунд. ШИМ достигается с помощью переменного управляющего напряжения.
Цепь сигнала синхронизации:
Напряжение синхронизации может быть получено из линейного напряжения, которое поступает из схемы тиристоров, и это может гарантировать, что точка перехода через ноль от отрицательного к положительному значению напряжения синхронизации точно соответствует фазовому углу сдвига (= 00) полностью управляемого трехфазного моста. выпрямительная схема.
Рис. 2 Схема синхронизации.
Рис: 3 Принципиальная схема преобразователя мощности
Рис. 4 Блок-схема
Микроконтроллер Atmega-328
Высокопроизводительный 8-разрядный микроконтроллер Atmel на базе RISC AVR сочетает в себе 32 КБ флэш-памяти ISP с возможностью чтения во время записи, 1 КБ EEPROM, 2 КБ SRAM, 23 линии ввода-вывода общего назначения, 32 рабочих регистра общего назначения, три гибких таймера / счетчики с режимами сравнения, внутренними и внешними прерываниями, последовательным программируемым USART, байтовым двухпроводным последовательным интерфейсом, последовательным портом SPI, 6-канальным 10-битным аналого-цифровым преобразователем (8 каналов в пакетах TQFP и QFN / MLF ), программируемый сторожевой таймер с внутренним генератором и пять программно выбираемых режимов энергосбережения.Устройство работает в диапазоне 1,8-5,5 вольт.
Выполняя мощные инструкции за один такт, устройство достигает пропускной способности, приближающейся к 1 MIPS (микропроцессор без взаимосвязанных этапов конвейера) на МГц, балансируя энергопотребление и скорость обработки.
Дисплей
Встроенная плата с 2-строчным ЖК-дисплеем используется для отображения значения АЦП и соответствующего угла открытия. Значения на дисплее мгновенны с изменением значений аналогового напряжения АЦП и изменениями угла зажигания.
Генерация запускающего импульса.
В любое время, когда в сети переменного тока обнаруживается пересечение нуля (задний фронт прямоугольной волны), микроконтроллер прерывается, и последние значения АЦП используются для управления задержкой срабатывания, которая используется для определения угла срабатывания с помощью соответствующих математических расчетов. В соответствии с углом включения, запускающий импульс генерируется для вывода затвора SCR для запуска тиристора. На ЖК-дисплее для наблюдателя, который контролирует
, отображаются выход АЦП и угол открытия, который рассчитывается по показаниям АЦП.выходных преобразователей.Выход АЦП 0-1023, который используется для управления углом открытия 00-1800.
Цепь импульсного выхода.
В схеме импульсного выхода 6 импульсов запуска выводятся с вывода P1.0 на вывод P1.5 микроконтроллера. Каждый импульс отправляется на оптический изолятор для изоляции от электросети; затем его выход отправляется на импульсный трансформатор, и последний импульс от импульсного трансформатора запускает соответствующий тиристор.
Последовательность программирования:
АЦП: Аналоговое напряжение (0-5 В) подается на АЦП ATmega-328 через порт, который преобразуется в отсчет от 0 до 1023.Этот счет после правильной математической обработки используется для генерации задержки генерации запускающего импульса.
Цепь сигнала синхронизации:
С сигнальной схемой синхронизации, напряжение синхронизации может быть получено из линейного напряжения, которое поступает от схемы тиристоров, и это может гарантировать, что точка пересечения нуля от отрицательного к положительному значению напряжения синхронизации точно соответствует фазовому углу сдвига (= 00) трехфазного напряжения. фазовый мост полностью управляемая выпрямительная схема.Прямоугольная волна выводится через цепь сигнала синхронизации, которая равна
.используется для создания подпрограммы. В подпрограмме запускающий импульс выводится с желаемым углом зажигания, определяемым аналоговым напряжением (0-5 В).
Здесь процесс программирования описывается как:
Инициализация портов ввода-вывода.
Проверить уровень напряжения на порте АЦП.
Используя сигнальную цепь синхронизации, определите переход через ноль сети переменного тока
Сигнальная цепь синхронизации выводит прямоугольный сигнал, он подается в подпрограмму At mega 328, и задний фронт прямоугольного сигнала вызывает подпрограмму.
На основе значения АЦП генерируется задержка, известная как угол открытия.
В подпрограмме выводится прямоугольный сигнал.
Этот импульс подается на тиристор через оптрон для развязки драйвера и силовой цепи.
Управляемый выход постоянного тока.
Генерация запускающего импульса: при обнаружении подпрограммы запускающий импульс с периодом Ton 100 микросекунд используется для запуска тиристора.Тиристор коммутируется, когда напряжение питания становится отрицательным из-за естественной коммутации. В следующем цикле снова создается подпрограмма, которая используется для запуска тиристора.
Цель и сфера действия
Основная задача, связанная с проектированием, разработкой, тестированием и установкой контроллера запуска для трехфазного тиристорного выпрямителя, заключается в управлении скоростью двигателя постоянного тока.
Цель делится на следующие категории:
Разработать надежную схему срабатывания с использованием микроконтроллеров AT mega 328 для запуска тиристоров трехфазного полностью управляемого выпрямителя.
Для проверки разработанной схемы с использованием двигателя постоянного тока для регулирования скорости.
Заключение
Конструкция изолирована от электромагнитных помех со стороны входа и выхода. Регулировка мощности возможна путем изменения (угла зажигания) с помощью управляющего напряжения с использованием микроконтроллера At mega 328 и программирования аналогового напряжения при условии, что он управляет углом зажигания и контролирует скорость двигателя постоянного тока.
Интеграция модулей приведет к полностью управляемому преобразователю с превосходными характеристиками по сравнению с другими обычными методами управления.
Выполняя мощные инструкции за один такт, устройство достигает пропускной способности, приближающейся к 1 MIPS (микропроцессор без взаимосвязанных этапов конвейера) на МГц, балансируя энергопотребление и скорость обработки.
Поскольку для управления мощностью преобразователя используется аналоговое напряжение (0-5 В), АЦП микроконтроллера Atmega-328 имеет разрешение 10 бит. Аналоговое напряжение (0-5 В) преобразуется в счет (0 1023), и преобразование занимает около 250 микросекунд. ШИМ достигается с помощью переменного управляющего напряжения.
Следовательно, это дает точный контроль скорости двигателя постоянного тока за очень короткий промежуток времени.
Список литературы
Suhel Mustajab, Mohd. Подход на основе программного обеспечения Kashif Adhmi для запуска 3-фазного, 6-импульсного преобразователя переменного тока в постоянный. Международный журнал перспективных исследований в области компьютерной инженерии и технологий (IJARCET), том 1, выпуск 9, ноябрь 2012 г.
X U Wuxiong Конструкция тиристорной цифровой триггерной схемы на базе микроконтроллера.Международная конференция по информатике и инженерии (ICISE 2009).
Р. Л.
Moreno The Design of the Digital IC for Thyristor Triggering, 10-я конференция по разработке СБИС, январь 1997 г.
[5] Мухаммад Х. Рашид, Силовая электроника (схемы,Устройства и приложения), 3-е изд., Pearson Prentice Hall,
2006, стр. 339.
[6] С.С. Упадхья, К. Кант, Дж. Сингх, A NewАппаратное обеспечение микропроцессорного интерфейса для запуска SCR, выполнение IEEE, vol.70, No. 10, октябрь 1982 г.
Шашикант В. Лахаде, С. Р. Хирехан, С. Ю. Бедар Разработка и реализация схемы цифрового запуска для преобразователя. Международный журнал инженерных исследований
& Technology (IJERT) ISSN: 2278-0181. Vol. 1, выпуск 3, май 2012 г.
Сохаил Анвар, Патрик Фавье, Калман Миксзат Разработка и внедрение контроллера запуска на базе микроконтроллера PIC для трехфазного тиристорного выпрямителя.
P C Sen, Power Electronics, Tata McGrawHill.
(PDF) Конструкция на базе микроконтроллера Трехфазный статический вольт-амперный реактивный компенсатор с тиристорным управлением
Рис. 11. Сигнал желтого цвета отстает на 20 градусов перед компенсацией
Рис. 12. Профиль напряжения компенсированной трехфазной системы .
Аналогично, когда напряжение системы в реальном времени увеличивается
из-за слабой нагрузки или отсутствия нагрузки, напряжение системы
опережает номинальное значение. Требуемое системное напряжение может быть также
, полученное путем соединения линии передачи с индуктором
посредством включения симистора.
VI. C
ВКЛЮЧЕНИЕ
Хотя изменение напряжения и частоты системы с изменением нагрузки
является очень распространенной проблемой в системе электроснабжения
. Для обеспечения потребителей качественной электроэнергией необходимо поддерживать напряжение и частоту системы на уровне
в соответствии с разработанной системой. Реальная и реактивная мощности
также должны быть на номинальном значении в соответствии с разработанной системой
.Надежность системы может поддерживаться
, компенсирующим реактивную мощность до определенного уровня. Статический компенсатор
VAR используется для компенсации реактивной мощности в системе передачи высокого напряжения
. Комбинация TSC и
TCR является обычно используемым методом компенсации реактивной мощности
. Разработанный прототип микроконтроллера на базе компенсатора
представляет собой комбинацию TSC и TCR с подавителем гармоник
.Компенсатор реактивной мощности
может использоваться как для систем HVDC, так и для систем HVAC. Концепция
FACTS для системы сверхвысокого напряжения возникает для обеспечения надежности
с минимальным контролем за счет использования передовых технологий, таких как
, а также очень быстрого переключения. SVC разработан для использования
полупроводниковых устройств, таких как тиристор, для более быстрого переключения
соединительных конденсаторов и катушек индуктивности с передачей
в соответствии с требованиями системы без помех
гармоник из-за переключения.Предлагаемая конструкция компенсатора реактивной мощности
с симистором и микроконтроллером
обеспечивает новую концепцию системы компенсации реактивной мощности
в системах сверхвысокого и сверхвысокого напряжения.
R
ДОПОЛНИТЕЛЬНАЯ ИНФОРМАЦИЯ
[1] Джон Дж. Грейнджер, Уильям Д. Стивенсон, Power System Analysis, Tata
McGraw Hill, Нью-Дели, Индия 2003.
[2] Ашфак Хусейн, Электроэнергетические системы, 5-е Издание, издательство CBS,
Нью-Дели, Индия 2007.
[3] В.К. Мехта и Рохит Мехта, Принципы энергосистем, 4
th
Пересмотренное издание
, С. ЧАНД, Нью-Дели, Индия, 2011
[4] Хади Сссдат, Анализ энергосистемы, исправленное издание, Тата МакГро-
Hill Publishing Company Limited, Нью-Дели, Индия, 1999.
[5] Дж. Дункан Гловер, Мулукутла С. Сарма и Томас Дж. Овербай, Power
System Analysis and Design, 4
th
Edition, Thomas Обучение, Онтарио,
Канада, 2008 г.
[6] Дебаприя Дас, Электроэнергетические системы, New Age International (P)
Ltd., Издательство, Нью-Дели, Индия, 2006.
[7] Сунил С. Рао, Системы защиты и питания распределительных устройств, 12
th
Edition,
Khanna Publishers, Нью-Дели, Индия, сентябрь 2007 г.
[8] Ed. Ричард К. Дорф, Справочник по электротехнике, CRC Press
LLC, USA 2000.
[9] Л. Гьюджи, Р. Отто, Т. Путман, «Принципы и применение статических компенсаторов,
Шунтовые компенсаторы с тиристорным управлением. , ”IEEE Transaction on PAS,
vol.PAS-97, № 5, стр. 1935-1945, октябрь 1980 г.
[10] К. Эдвардс, К. Маттерн, Э. Стейси, П. Наннери, Дж. Губерник,
«Усовершенствованный статический VAR-генератор, использующий GTO. Тиристоры », IEEE
Transaction on Power Delivery, vol. 3, nº 4, pp. 1622-1627, October
1988.
[11] Карл Э. Шталькопф и Марк Р. Вильгельм, «Более жесткие средства управления для более загруженных систем
», IEEE Spectrum, Vol. 34, N ° 4, апрель 1997 г., стр. 48-52.
[12] Мухаммад Х.Рашид, Справочник по силовой электронике, Harcourt Science
and Technology Company, США, 2001.
[13] Тиристоры и симисторы в автомобильной промышленности, STMicroelectronics
Группа компаний, США, 2004.
[14] Теория и конструкция тиристоров Соображения, ON Semiconductor, США,
2005.
[15] BL Тераджа и А. Тераджа, Электрические технологии, Том IV,
Пересмотрено 23
rd
Издание, S.CHAND, Нью-Дели, Индия, 2002.
[16] Хуан Диксон, Луис Моран, Хосе Родригес и Рикардо Домке, «Реактивные
Технологии компенсации мощности, современный обзор», IEEE
Transaction on Industry Applications, vol. IA-25, № 4, стр. 598-608,
июль / август 1989 г.
3-я МЕЖДУНАРОДНАЯ КОНФЕРЕНЦИЯ ПО ИНФОРМАТИКЕ, ЭЛЕКТРОНИКЕ И ВИДЕНИЮ 2014
978-1-4799-5180-2 / 14 / $ 31,00 © 2014 IEEE
% PDF-1.3 % 1 0 obj > поток конечный поток эндобдж 2 0 obj > / Родительский 3 0 R / Тип / Страница / Содержание 4 0 R / Ресурсы> / ProcSet [/ PDF / Text / ImageC] / Font >>> / MediaBox [0 0 595.fcq * d = SRSm} s & k + 7G / ujfchXo ~ n Շ; t
Управление симистором CN-6 с использованием семейства микроконтроллеров COP400
% PDF-1.4 % 1 0 obj> поток application / pdfCN-6 Управление симистором с использованием семейства микроконтроллеров COP400
Управление мощностью переменного тока – Как контролировать электрическую мощность переменного тока: приложения
Для работы большинства бытовых электроприборов требуется питание переменного тока.Эта мощность переменного тока или переменный ток подается на приборы посредством операции переключения некоторых силовых электронных переключателей. Для бесперебойной работы нагрузок необходимо контролировать подаваемую на них мощность переменного тока. Это достигается, в свою очередь, за счет управления переключением силовых электронных переключателей, таких как SCR.
Два метода управления переключением SCR
- Метод управления фазой : Это относится к управлению переключением SCR со ссылкой на фазу сигнала переменного тока.Обычно тиристор срабатывает под углом 180 градусов от начала сигнала переменного тока. Или, другими словами, при пересечении нуля формы сигнала переменного тока запускающие импульсы подаются на вывод затвора тиристора. В случае управления мощностью переменного тока, подаваемой на SCR, подача этих импульсов задерживается за счет увеличения времени между импульсами, и это называется управлением задержкой по углу зажигания. Однако эти цепи вызывают гармоники более высокого порядка и генерируют радиочастотные помехи и сильный пусковой ток, а при более высоких уровнях мощности требуется больше фильтров для уменьшения радиопомех.
- Интегральное переключение цикла: Интегральное управление циклом – это еще один метод, используемый для прямого преобразования переменного тока в переменный, известный как переключение нуля или выбор цикла. Запуск интегрального цикла относится к цепям переключения переменного тока и, в частности, к цепям переключения переменного тока с нулевым напряжением интегрального цикла. Когда переключатель нулевого напряжения используется для переключения низкого коэффициента мощности (индуктивной нагрузки), такого как двигатель или силовой трансформатор, вызывает перегрев силового трансформатора в линиях электроснабжения.Следовательно, при насыщении тока нагрузки возникают чрезмерно высокие пусковые токи. Другой подход к переключению нулевого напряжения интегрального цикла включает использование относительно сложных устройств бистабильных накопительных элементов и логических схем, которые фактически подсчитывают количество полупериодов тока нагрузки. Переключение интегрального цикла состоит из включения питания нагрузки на целое число циклов и последующего отключения питания еще на количество интегральных циклов. За счет переключения тиристоров при нулевом напряжении и нулевом токе генерируемые гармоники будут уменьшены.Использование интегрального цикла переключения плавного напряжения невозможно, а частота может изменяться. Интегральное переключение цикла путем срабатывания срабатывания тиристоров в качестве метода удаления всего цикла, циклов или частей циклов сигнала переменного тока является хорошо известным и старым методом управления мощностью переменного тока, особенно при нагрузках нагревателя переменного тока. Однако концепция достижения цикличности формы волны напряжения с помощью микроконтроллера может быть очень точной в соответствии с программой, написанной на языке Assembly / C. Таким образом, среднее время действия напряжения или текущего напряжения на нагрузке пропорционально меньше, чем если бы весь сигнал был подключен к нагрузке.
Одним из побочных эффектов использования этой схемы является дисбаланс входного тока или формы волны напряжения, поскольку циклы включаются и выключаются по нагрузке, следовательно, они подходят для конкретных нагрузок в отличие от метода управления углом зажигания для минимизации THD.
Прежде чем переходить к примерам для каждого типа управления, давайте кратко расскажем об обнаружении перехода через ноль.
Обнаружение пересечения нуля или пересечения нулевого напряжения
Под термином «пересечение нулевого напряжения» мы понимаем точку на форме сигнала переменного тока, где сигнал пересекает нулевую точку отсчета формы волны или, другими словами, где форма волны сигнала пересекает точку x- ось.Он используется для измерения частоты или периода периодического сигнала. Его также можно использовать для генерации синхронизированных импульсов, которые можно использовать для запуска вывода затвора кремниевого управляемого выпрямителя, чтобы он проводился под углом включения 180 градусов.
Синусоида по своей природе имеет узлы, в которых напряжение пересекает нулевую точку, меняет направление на противоположное и завершает синусоидальную волну.
Переключая нагрузку переменного тока в точке нулевого напряжения, мы практически исключаем потери и напряжения, вызванные напряжением.
Цепь ZVS или ZVR с измерением нулевого перекрестного напряжения или измерения нулевого напряжения
Обычно OPAMP, используемый для обнаружения перехода через нуль, работает как компаратор, сравнивая пульсирующий сигнал постоянного тока (полученный путем выпрямления сигнала переменного тока) с эталонным напряжением постоянного тока (полученным путем фильтрации пульсирующего сигнала постоянного тока). Опорный сигнал подается на неинвертирующую клемму, а пульсирующее напряжение – на инвертирующую клемму.
В случае пульсирующего напряжения постоянного тока будучи меньшим, чем эталонный сигнал, высокий логический уровень сигнала разрабатывается на выходе компаратора.Таким образом, для каждой точки перехода через нуль сигнала переменного тока на выходе детектора перехода через ноль генерируются импульсы.
Видео о детекторах перехода через ноль
Интегральное управление циклом переключения (ISCC):
Для устранения недостатков переключения интегрального цикла и переключения фазового управления используется интегральное переключение управления циклом для управления тепловой нагрузкой. Схема ISCC состоит из 3-х секций. Первый состоит из источника питания для управления всеми внутренними усилителями и подачи энергии затвора на силовые полупроводниковые устройства.Вторая секция состоит из обнаружения нулевого напряжения путем обнаружения нулевого напряжения питания и обеспечивает фазовую задержку. В третьем разделе необходим каскад усилителя, который усиливает управляющий сигнал для обеспечения привода, необходимого для включения выключателя питания. Цепи ISCC состоят из пусковой цепи и усилителя мощности (FCPA) и источника питания для управления нагрузкой.
FCPA состоит из драйверов затвора для тиристора, а TRIAC используется в качестве силовых устройств в предлагаемой конструкции. Симистор может проводить ток в любом направлении, когда он включен, и раньше он назывался двунаправленным триодным тиристором или двусторонним триодным тиристором.Симистор – это удобный переключатель для цепей переменного тока, который позволяет контролировать большие потоки мощности с помощью управляющих токов миллиамперной шкалы.
Применение интегрального переключения цикла – промышленное управление мощностью с помощью интегрального переключения
Этот метод можно использовать для управления мощностью переменного тока, особенно при линейных нагрузках, таких как нагреватели, используемые в электропечи. При этом микроконтроллер выдает выходной сигнал на основе полученного прерывания в качестве эталона для генерации запускающих импульсов.
Используя эти запускающие импульсы, мы можем управлять оптоизоляторами для запуска симистора для достижения интегрального управления циклом в соответствии с переключателями, которые связаны с микроконтроллером. Вместо двигателя предусмотрена электрическая лампа для наблюдения за его работой.
Блок-схема управления мощностью посредством переключения интегрального циклаЗдесь используется детектор перехода через ноль для подачи запускающих импульсов для импульсов затвора тиристора. Применение этих импульсов контролируется микроконтроллером и оптоизолятором.Микроконтроллер запрограммирован на подачу импульсов на оптоизолятор в течение фиксированного периода времени, а затем прекращение подачи импульсов на другой фиксированный промежуток времени. Это приводит к полному устранению нескольких циклов формы сигнала переменного тока, приложенного к нагрузке. Соответственно, оптоизолятор управляет тиристором на входе микроконтроллера. Таким образом регулируется мощность переменного тока, подаваемая на лампу.
Применение переключения с фазовым управлением – программируемое управление мощностью переменного тока
Блок-схема управления мощностью с помощью метода фазового управленияЭтот метод используется для управления силой света лампы путем управления мощностью переменного тока, подаваемой на лампу.Это делается путем задержки подачи запускающих импульсов на TRIAC или с помощью метода задержки по углу зажигания. Детектор перехода через нуль подает импульсы при каждом переходе через ноль сигнала переменного тока, который подается на микроконтроллер. Первоначально микроконтроллер подает эти импульсы на оптоизолятор, который соответственно запускает тиристор без какой-либо задержки, и, таким образом, лампа светится с полной интенсивностью. Теперь, используя клавиатуру, соединенную с микроконтроллером, требуемая интенсивность в процентах применяется к микроконтроллеру, и он запрограммирован на соответствующую задержку подачи импульсов на оптоизолятор.Таким образом, срабатывание тиристора задерживается и, соответственно, регулируется яркость лампы.
Привод / работа и управление нагрузками большой мощности с помощью микроконтроллеров
Иногда мы хотим управлять большими нагрузками с помощью микроконтроллеров. Под большими нагрузками я подразумеваю двигатели, вентиляторы, блоки переменного тока, лампы и другие источники высокого напряжения и тока. Поскольку все мы знаем, что микроконтроллеры могут выводить / подавать напряжение от +3,3 до +5 вольт и от 25 мА до 40 мА через свои контакты ввода / вывода.Этого напряжения и тока недостаточно для привода мощных двигателей, вентиляторов, лампочек и т. Д. Есть несколько методов и электронных компонентов, которые могут выдерживать гораздо большие нагрузки (токи / напряжения). Мы можем сопрягать эти компоненты с микроконтроллерами и управлять нагрузками большой мощности. В этом руководстве я расскажу об этих методах и об электронных компонентах, которые могут взаимодействовать с микроконтроллерами для работы с большими (ток-напряжение) нагрузками.
Методы / методы управления большими нагрузками с помощью микроконтроллеров
Мы можем использовать следующие электронные компоненты для управления нагрузками большой мощности с микроконтроллерами.- Транзисторы
- оптрон
- Реле
- Мосфетс
- SSR (твердотельное реле)
Верхний список начинается от электронного компонента управления малой мощностью (транзистор) до управления высокой мощностью (твердотельное реле SSR). Эти электронные компоненты могут взаимодействовать с микроконтроллерами любого производителя Altera, Atmel, Cypress Semiconductor, Maxim Integrated, EPSON Semiconductor, Freescale Semiconductor, Infineon, Intel, Microchip Technology, National Semiconductor, NXP Semiconductors, Panasonic, Parallax, Silicon Laboratories, Silicon Motion, Sony, STMicroelectronics, Texas Instruments, Toshiba.Я связал вышеуказанные компоненты во многих схемах с различными микроконтроллерами, например, Arduino, Pic, Stm32, 8051, Picaxe, Avr, Atmega, Arm и серии LPC и т. Д. Для управления нагрузками высокой мощности. Вышеупомянутые компоненты могут использоваться с мини-компьютерами или платами для разработки, такими как платы BeagleBone, Raspberry Pi, Olimex и Xilinx FPGA.
Управление большими нагрузками с помощью микроконтроллеров и транзисторов.
Транзистор – это полупроводниковое устройство, используемое для переключения и усиления электронного сигнала и электронной энергии.Он имеет три терминала: База, Эмиттер и Коллектор. Небольшое напряжение, приложенное к базе, заставляет ток течь от коллектора к эмиттеру (npn) или от эмиттера к коллектору (pnp). Это два распространенных типа транзисторов PNP и NPN. В этом руководстве не рассматриваются электронные компоненты, а только показан метод, с помощью которого мы можем контролировать большие нагрузки.
Транзистор для управления большой нагрузкой с микроконтроллером | Обычно транзистор может выдерживать токи до 600 миллиампер и напряжение до 20 вольт.Рейтинги могут быть немного высокими или низкими. Максимальная мощность, с которой может работать транзистор, составляет от 12 до 18 Вт. Этой мощности достаточно для управления нагрузками, мощность которых падает ниже 18 Вт, такими как игрушечные двигатели постоянного тока, лампочки постоянного тока и т. Д. Но все же этой мощности недостаточно для управления нагрузками, которые потребляют постоянный ток в 1 ампер. |
Транзисторы могут быть скомпонованы вместе для получения высокого коэффициента усиления по току. Самая популярная конфигурация – это конфигурация Дарлингтона, в которой высокий коэффициент усиления по току достигается за счет небольшого переключателя напряжения. На рынке доступно множество коммерческих микросхем, которые содержат встроенные в них транзисторы. Такие как ULN2003 и ULN2803 содержат массив транзисторов Дарлингтона в стороне от них.
| Конфигурация схемы Дарлингтона и вывод микросхемы ULN2003 показаны с правой стороны.ULN2003 содержит 7 конфигураций Дарлингтона сбоку. Его легко использовать IC вместо того, чтобы создавать конфигурацию Дарлингтона самостоятельно. Ic занимает меньше места и требует меньше соединений. | Конфигурация Дарлингтона в ULN2803 |
Многие другие конфигурации могут быть выполнены с использованием транзисторов для усиления тока. Но для этого урока лучше всего подходит Дарлингтон. ULN2003 может управлять током 500 мА при 50 вольт. Таким образом, конфигурация Дарлингтона увеличивает мощность до 25 Вт.
Некоторые проекты, которые я создал с использованием транзисторов и микроконтроллеров для управления нагрузками и т. Д. Проекты содержат бесплатный исходный код и принципиальные схемы.
Управление большими нагрузками с помощью микроконтроллеров и оптопар.
Оптопара / оптоизолятор или оптопара – это электронный компонент, который отделяет две цепи друг от друга с использованием света в качестве среды. Две цепи независимы, но могут управляться источником света. Небольшое напряжение, приложенное к одной стороне, активирует другую цепь.Оптопара состоит из светодиодного диода и фотоэлемента. Когда на светодиодный диод подается напряжение, он загорается, и свет падает на фотоэлемент. Сопротивление фотоэлемента уменьшается при получении света, поэтому он начинает проводить.
Оптопара для управления большими нагрузками с микроконтроллером | Слева показана общая схема оптопары с подключениями к микроконтроллеру. Мотор управляется микроконтроллером. Оптроны используются во многих схемах для изоляции одной цепи от другой.Таким образом исключается опасность высоких шипов. Если у них высокий пик, он только снесет оптопару на оставшейся цепи, останется в безопасности. Обычно он используется в высокоценных сердечниках схем. Чтобы изолировать их с помощью цепей регулирования высокого тока. Оптопары могут выдерживать большую мощность, чем транзисторы. Например, оптопара FOD3180, которая может выдерживать непрерывный ток 2 А и напряжение от 10 до 20 вольт. Оптопары постоянного тока могут управлять мощностью от 40 до 60 Вт. В отличие от транзисторов, которые не используются при коммутации нагрузок переменного тока.Оптопары могут использоваться для управления тяжелыми нагрузками переменного тока. Это будет обсуждаться в теме SSR (твердотельные реле). |
Некоторые проекты, которые я создал, используя оптопары и микроконтроллеры для управления нагрузками и т. Д. Проекты содержат бесплатный исходный код и принципиальные схемы.
Управление большими нагрузками с помощью микроконтроллеров и реле.
Распиновка реле
Реле – это механические переключатели, которые размыкаются и замыкаются при подаче напряжения на указанные контакты.Реле состоит из катушки и NC (нормально замкнутого), NO (нормально разомкнутого) и общей линии. В идеальном состоянии (отсутствие питания) общий контакт закорочен с контактом NC (нормально замкнутый). Создание путитока между общей и нормально закрытой линией. Но когда на катушку реле подается достаточное напряжение, общий контакт замыкается на нормально разомкнутый контакт. Создание пути прохождения тока между общим и нормально разомкнутым контактом. Путь представляет собой прямое механическое соединение между проводами. Слева показано 5-контактное реле.Реле поставляется во многих упаковках, таких как однополюсный, однополюсный, двухполюсный и двойной (DBDT), однополюсный, двойной желоб (SPST) и т. Д. Реле
можно напрямую управлять с помощью выводов микроконтроллера. Небольшие реле на +3 и +5 вольт могут напрямую управляться через контакты GPIO микроконтроллера (вход / выход общего назначения). Но для некоторых катушек реле требуется больший ток для переключения выходного канала. Чтобы обеспечить им достаточное напряжение, они выводятся через транзисторы. Реле выдерживают 10-15 ампер тока и 110-220 вольт.Мы можем легко управлять нагрузкой 500 Вт с помощью стандартных реле.
Реле управления большими нагрузками с микроконтроллером и транзистором | Реле управления большими нагрузками с микроконтроллером и uln2003 |
На приведенных выше рисунках реле управляется одним транзистором и микросхемой uln2003, содержащей схему матрицы транзисторов Дарлингтона. Реле могут управлять нагрузками постоянного и переменного тока.Реле – это самый старый механический метод переключения тяжелых нагрузок, например лампочек и вентиляторов.
Некоторые проекты, которые я создал с использованием реле и микроконтроллеров для управления большими токовыми нагрузками и т. Д. Проекты содержат бесплатный исходный код и принципиальные схемы.
Управление большими нагрузками с помощью микроконтроллеров и полевых транзисторов.
Термин MOSFET расшифровывается как Metal Oxide Semiconductor Field Effect Transistor. Чтобы понять МОП-транзисторы, нам сначала нужно понять полевой транзистор (FET).Полевой транзистор (FET) – это тип транзистора, обычно используемый для усиления сигнала. Полевой транзистор может усиливать аналоговые или цифровые сигналы. Его также можно использовать для переключения нагрузок постоянного тока. В полевых транзисторах ток течет по полупроводниковому пути, который называется каналом . Полевые транзисторы существуют в двух основных классификациях. Они известны как переход FET (JFET) и металлооксидный полупроводник FET (MOSFET) . Мосфет имеет три контакта: затвор, сток и исток.Фет и Мосфет – большая тема, не могу объяснить это в этом посте. Ресурс доступен здесь FET и MOSFETFEt и mosfet для управления большими нагрузками с микроконтроллером
Mosfet стал очень популярным в наши дни. Они используются в импульсных источниках питания, понижающих и повышающих преобразователях. МОП-транзисторы обладают большим потенциалом в управлении большими токами с помощью сигнала ШИМ (широтно-импульсной модуляции). Они используются в зарядных устройствах солнечных батарей Pwm или MPPT (отслеживание максимальной мощности). Mosfet может управлять нагрузкой более +1000 Вт.Так что, если вам нужно управлять нагрузкой 1000 Вт с микроконтроллером, то МОП-транзисторы – хороший выбор.
Управление большими нагрузками с помощью микроконтроллеров и твердотельного реле (SSR)
SSR означает твердотельное реле. Он может выдерживать нагрузку в несколько тысяч ватт. Он может выдерживать ток от 300 до 500 ампер. SSR – это не обычное реле, которое похоже на механические переключатели. Небольшое напряжение на входе может вызвать протекание большой нагрузки (тока) из цепи.
SSR с микроконтроллером для управления большими нагрузками | Чтобы полностью понять работу ssr, мы должны сначала понять два электронных компонента.Эти компоненты являются строительным блоком SSR. Компоненты сами по себе развиваются из концепции работы транзисторов.
|
SCR против TRIAC
SCR (кремниевый управляемый выпрямитель или тиристор) представляет собой полупроводниковое переключающее устройство с двумя выводами питания, называемыми анодом (A) и катодом (K), и одним выводом управления, называемым затвором (G). Если клемма K положительна по отношению к A, тиристор смещен в обратном направлении и блокирует протекание тока.Если клемма A положительна по отношению к K, SCR смещен в прямом направлении и будет блокировать ток, пока клемма G (затвор) не получит положительный импульс по отношению к K. Этот запускающий импульс запустит SCR в проводимость, и ток будет переходите от A к K. SCR будет проводить с почти постоянным падением напряжения на нем – обычно 1,2 В постоянного тока. SCR будет продолжать работать после того, как триггерный импульс прекратится, пока ток через SCR не прекратится, после чего он вернется в состояние блокировки. Название Triac означает триодный (трехэлектродный) переключатель переменного тока. Это тиристорное устройство, похожее на SCR, но отличается тем, что оно может переключаться на проводимость в обоих направлениях в ответ на положительный или отрицательный сигнал затвора. Символы TRIAC и SCR показаны слева. SCR может работать как TRIAC, если мы присоединим к нему еще один SCR в противоположном направлении, и ворота будут объединены.SCR и TRAIC используются для управления нагрузками переменного тока. Они используются для контроля фаз электросети и т. Д.Они также могут работать на входе PWM. Они широко используются в цепях переменного тока для приглушенного света. Стандартные диммеры, доступные на рынке, состоят из SCR или TRIAC.
SSR для переменного тока обычно состоит из оптоизолятора, управляющего симистором. SSR для использования постоянного тока обычно состоит из оптоизолятора, управляющего силовым полевым МОП-транзистором.Некоторые проекты, которые я создал, используя реле и микроконтроллеры для управления сильноточными нагрузками и т. Д. Проекты содержат бесплатный исходный код и принципиальные схемы.
.