
Управление устройствами через компьютер | Мастер Винтик. Всё своими руками!
Добавил: Chip,Дата: 20 Фев 2018Сейчас в каждой семье есть компьютер. С помощью компьютера можно не только играть, но выполнять полезные работы и решать различные задачи.
С помощью небольшой программы и схемы к ней можно управлять различными бытовыми приборами и устройствами.
Устройство подключают к одному из COM-портов, а управлять приборами можно как с помощью экранных клавиш, так и внешних датчиков.
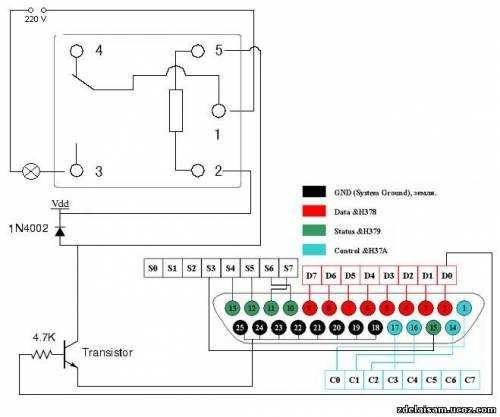
Принципиальная схема устройства
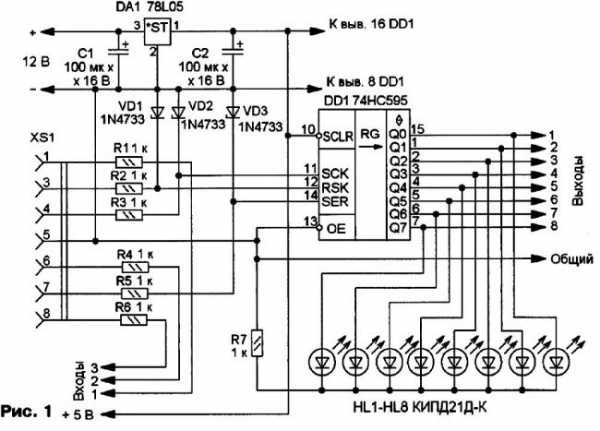
Схема управления приборами через COM-порт компьютера.
Его основа — микросхема 74HC595, представляющая собой 8-разрядный сдвиговый регистр с последовательным вводом и последовательным и параллельным выводами информации. Параллельный вывод осуществляется через буферный регистр с выходами, которые имеют три состояния. Информационный сигнал подают на вход SER (вывод 14), сигнал записи — на вход SCK (вывод 11), а сигнал вывода — на вход RSK (вывод 12). На микросхеме DA1 собран стабилизатор напряжения 5 В для питания регистра DD1.
Устройство подключают к одному из COM-портов компьютера. Информационные сигналы поступают на контакт 7 розетки XS1, сигналы записи информации — на контакт 4, а сигналы вывода информации — на контакт 3. Сигналы COM-порта согласно стандарту RS-232 имеют уровни около -12 В (лог. 1) и около +12 В (лог. 0). Сопряжение этих уровней с входными уровнями регистра DD1 выполнено с помощью резисторов R2, R3, R5 и стабилитронов VD1—VD3 с напряжением стабилизации 5,1 В.
Сигналы управления внешними приборами формируются на выходах Q0—Q7 регистра DD1. Высокий уровень равен напряжению питания микросхемы (около 5 В), низкий — менее 0,4 В. Эти сигналы являются статическими и обновляются в момент поступления высокого уровня на вход RSK (вывод12) регистра DD1. Светодиоды HL1—HL8 предназначены для наблюдения за работой устройства.
Управление устройством осуществляется с помощью разработанной автором программы UniCOM. Внешний вид главного окна программы показан на рисунке ниже.
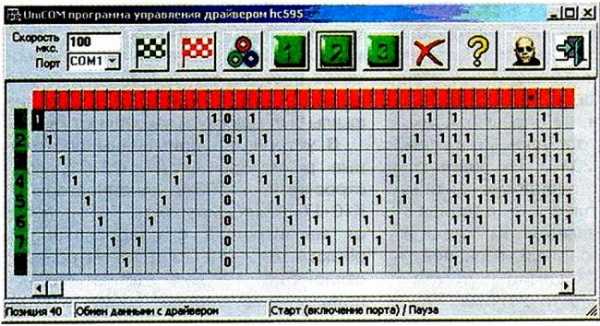
После ее запуска следует выбрать свободный COM-порт и скорость переключения выходов. В строки таблицы вводят состояние каждого из выходов устройства (высокий уровень — 1, низкий — 0 или пусто). Программа, «перебирая» в рабочем цикле столбцы таблицы, устанавливает на выходах устройства соответствующие логические уровни. Занесенная в таблицу информация автоматически сохраняется при завершении работы программы и загружается вновь при ее последующем запуске. Для наглядности, в левой части окна программы подсвечены номера выходов, на которых установлен высокий уровень.
Управление приборами можно осуществлять и с помощью внешних контактных датчиков, которые подключают к входам 1—3 и линии питания +5 В. Они должны работать на замыкание или размыкание контактов. Пример схемы подключения датчиков показан на рисунке.
При нажатии на экранную клавишу «Настройка входов» открывается окно «Согласование входов и выходов».
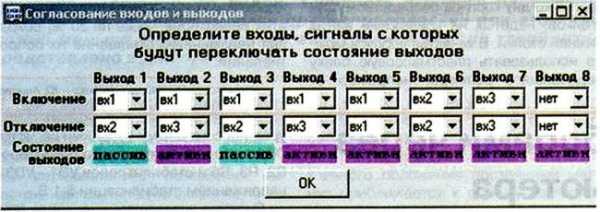
Управление приборами через COM-порт компьютера. Окно Согласование входов и выходов.
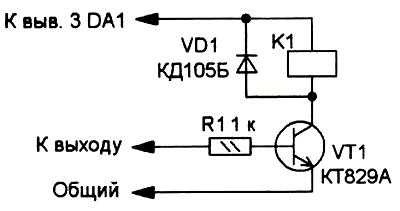
В этом окне выбирают входы, которые будут изменять состояние выходов. Имитировать работу входов можно, нажимая на экранные клавиши «1», «2», «3» основного окна программы. В тех случаях, когда приборами нельзя управлять с помощью логических уровней, следует применить реле или транзисторную оптопару (см. рисунки ниже).
Большинство деталей монтируют на печатной плате из односторонне фольгированного стеклотекстолита толщиной 1… 1,5 мм, чертеж которой показан на рисунке.
Чертеж печатной платы.
На этапе отработки алгоритма управления светодиоды можно установить на плате (см. рис.), а затем исключить. Резисторы R1, R4, R6 монтируют на выводах розетки XS1.
В устройстве применены резисторы С2-23, МЛТ, оксидные конденсаторы — К50-35 или импортные, розетка XS1 — DB9F. Помимо указанных на схеме стабилитронов, можно применить BZX55C5V1 или отечественные КС147А, светодиоды — любые. Микросхему устанавливают в панель. Питают устройство от стабилизированного или нестабилизированного источника питания напряжением 12 В и током до 100 мА.
Автор: Т.НОСОВ,г.Саратов, Журнал «Радио», 2007г., №11.
Здесь можно бесплатно скачать программу UniCOM
П О П У Л Я Р Н О Е:
- Поворотное крепление телевизора к стене своими руками
- Как быстро почистить утюг?
- Светодиодный светильник своими руками
Купить крепление телевизора, конечно проще, но дороже.
Простое поворотное крепление при желании может сделать каждый.
За одно оно будет такое, какое нужно именно Вам — соответствовать необходимым требованиям и под конкретное место.
Подробнее…
Разные варианты чистки утюга
У каждого в доме есть утюг. Простой или паровой с различными «наворотами» электроникой и т.п.
Любой утюг, а особенно паровой может не особо часто, но периодически нуждается в очистке.
Очистка становится все более частой, если Вы пользовались утюгом не по инструкции и использовали обычную воду, а не дистиллированную.
Подробнее…
Светодиодная лампа своими руками переделанная из энергосберегающей лампочки изготавливается за 30 минут и не требует особых навыков. Зато в результате можно получить экономичный и красивый источник света. Светодиодные лампы являются альтернативой традиционным лампам накаливания и могут использоваться и на улице, и внутри помещений. Они обладают высокой надежностью, высокой насыщенностью и чистотой света, а также не излучают вредного ультрафиолетового и инфракрасного излучения. В данной статье приведен процесс переделки энергосберегающей лампы (RKK) в светодиодный светильник своими руками. Подробнее…
– н а в и г а т о р –
Популярность: 1 174 просм.
ПОДЕЛИТЕСЬ С ДРУЗЬЯМИ
www.mastervintik.ru
Управление приборами через СОМ-порт компьютера
Автор разработал программу и устройство для управления различными электро и радиоприборами с помощью компьютера. Устройство подключают к одному из СОМ-портов, а управлять приборами можно как с помощью экранных клавиш, так и внешних датчиков.
Схема устройства показана на
Рисунок 1. Схема устройства
Устройство подключают к одному из СОМ-портов компьютера. Информационные сигналы поступают на контакт 7 розетки XS1, сигналы завиписи информации – на контакт 4, а сигналы вывода информации – на контакт 3. Сигналы СОМ-порта согнласно стандарту RS-232 имеют уровни около -12 В (лог.1) и около +12 В (лог.0). Сопряжение этих уровней с входными уровнями регистра DD1 выполнено с помощью резисторов R2, R3, R5 и стабилитронов VD1-VD3 с напряжением стабилизации 5,1 В.
Сигналы управления внешними приборами формируются на выходах Q0-Q7 регистра DD1. Высокий уровень равен напряжению питания микросхемы (около 5 В), низкий – менее 0,4 В. Эти сигналы являются статическими и обновляются на момент поступления высокого уровня на вход RSK (вывод 12) регистра DD1. Светодиоды HL1-HL8 предназначены для наблюдения за работой устройства.
Управление устройством осуществляется с помощью разработанной автором программы UmiCOM. Внешний вид главного окна программы показан на рис.2.
Рисунок 2. Внешний вид программы UniCOM
Псоле ее запуска следует выбрать свбодный СОМ-порт и скорость переключения выходов. В строки таблицы вводят состояние каждого из выходов устройства (высокий уроень – 1, низкий – 0 или пусто). Программа “перебирая” в рабочем цикле столбцы таблицы, устанавливает на выходах устройства соответствующие логические уровни. Занесенная в таблицу информация автоматически сохраняется при завершении работы программы и загружается вновь при ее следующем запуске. Для наглядности, в левой части окна программы подсвечены номера выходов, на которых установлен высокий уровень.
Управление приборами можно осуществлять и с помощью внешних контактных датчиков, которые подключают к входам 1-3 и линии +5 В. Они должны работать на замыкание или размыкание контактов. Пример схемы подключения датчиков показан на рис.3.
Рисунок 3. Подключение контактных датчиков
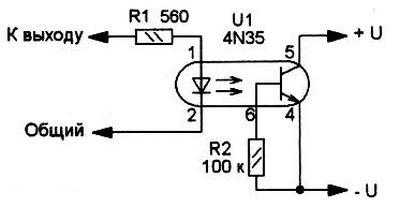
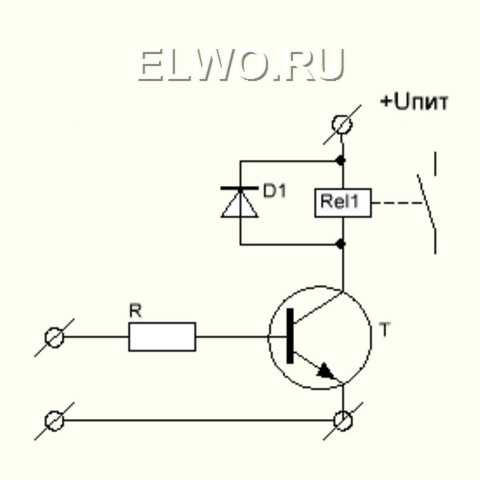
При нажатии на экранную клавишу “Настройка входов” открывается окно “Согласование входов и выходов” (рис.4.), где выбирают входы, которые будут изменять состояние выходов. Имитировать работу входов можно нажимая на экранные клавиши “1”, “2”, “3” основного окна программы. В тех случаях, когда приборами нельзя управлять с помощью логических уровней, следует применить реле, схема подключения которого показана на рис.5, или транзисторную оптопару (рис.6.).
Рисунок 4. Согласование входов и выходов
Рисунок 5. Схема подключения реле
Рисунок 6. Схема подключения транзисторной оптопары
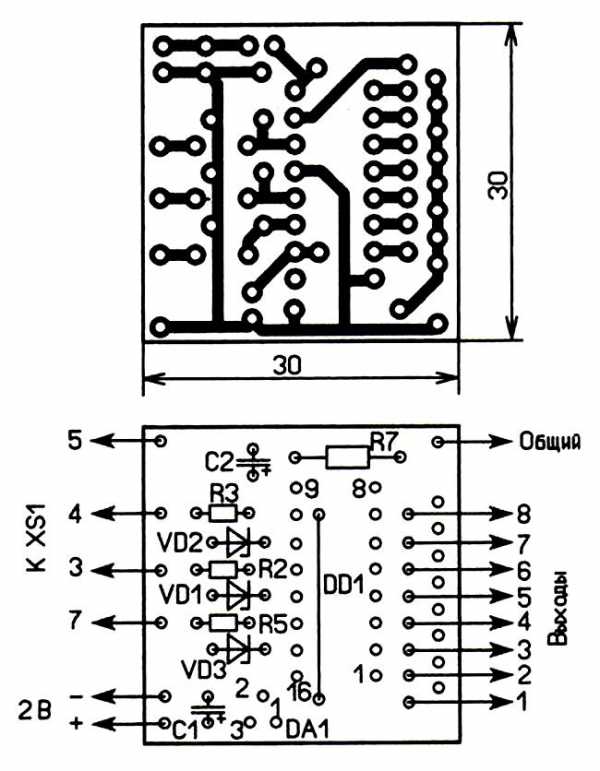
Большинство деталей монтируют на печатной плате из односторонего фольгированного стеклотекстолита толщиной 1…1,5 мм, чертеж которой показан на рис.7. Резисторы R1-R6 монтируют на выводах розетки XS1.
Рисунок 7. Чертеж печатной платы
В устройстве применены резисторы С2-23. МЛТ, оксидные конденсаторы – К50-35 или импортные, розетка XS1 – DB9F. Помимо указанных на схеме стабилитронов, можно применить BZX55C5V1 или отечественные КС174А, светодиоды – любые. Питают устройство от стабилизированного или нестабилизированного источника питания нпаряжением 12 В и током до 100 мА.
Источник: Журнал РАДИО 2007, выпуск 11.
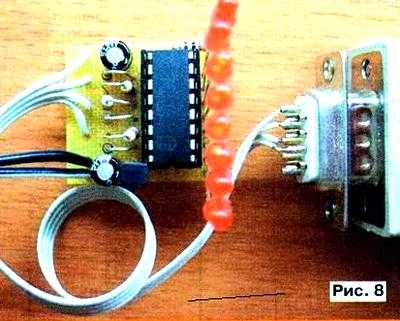
В моем случае была применена микросхема DD1 в корпусе SSOP16, входы и выходы сделаны на штыревых разъемах, на плате разместил кнопку включения/выключения питания; гнездо для подключения блока питания; блок питания с выходным напряжением 12 В был взят от модема TP-Link. Корпус для платы покамись не планируется.
Работа программы была проверенна под Windows 7/XP, проблем никаких не возникло. Для запуска программы достаточно распоковать архив и запустив приложение UniCOM.ехе. Устройство можно использовать не только для управления приборами, но и создавать различные световые эффекты, например, на выходы “повесить” светодиодные ленты через оптопары или силовые ключи на транзисторах. На своем примере покажу какие световые эффекты можно сделать, выставив в таблице программы логические 1 и 0.
Световой эффект – “Бегущий огонь”
Световой эффект – “Нарастающий столбик”
Это всего лишь малая часть тех эффектов, которые можно организовать. Фантазируйте и все получится…
Печатная плата – скачать
Программа UniCOM – скачать
shemu.ru
Управление приборами с рабочего стола ПК или через интернет
Управление светом через интернет.
Естественно управлять можно не только светом, а так же любым другим прибором со своего компьютера или удаленно через интернет. Одним прибором или несколькими.
На примере мы будем управлять лампой.

Подробности изготовления на картинке.
Итак, агрегат состоит из аппаратной и программной частей.
Часть 1. Аппаратная
Нам понадобятся следующие детали:
1. Лампа 220 В ;

2. lpt-удлинитель;
3. Плата;
4. угловой lpt-разъем на плату;
5. реле 12 VDC и коммутацией напряжения 220 вольт;
6. 4.7 К резистор;
7. npn-транзистор типа КТ3117А или любой другой с нормальным коэфф. усиления;
8. диод;
9. разветвитель питания в ПК, если питать от ПК. Но можно и от другого источника напряжением 12 в.
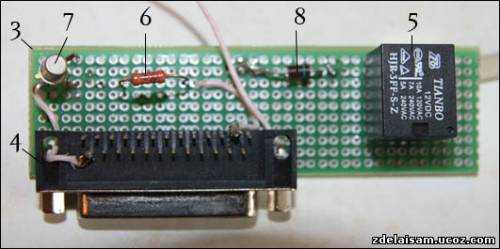
Схема устройства проста в сборке:
Серый прямоугольник сверху — реле.
Если мы будем подавать на пин D единицу, на нем будет появляться напряжение и в конечном итоге реле переключится, включив лампу.
По вышеизображенной схеме спаяем подобное:
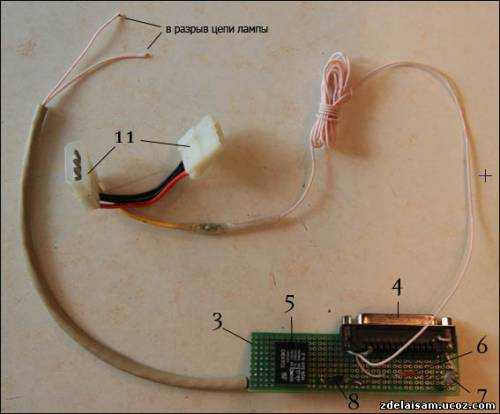
Впаиваем плату в разрыв цепи нашей лампы; подключаем через lpt-удлинитель к соответствующему порту ПК; подключаем к питанию ПК через разветвитель питания 11; ну и саму лампу в 220 В.
Часть вторая. Программная
Для оживления нашей лампы напишем программу на Delphi (первое что попалось под руки, переписать на C совсем не трудно, в программе буквально 3 строчки кода)
Исходник: /svetom/lamp_1.0.rar (эта программа умеет исключительно включать и отключать лампу по нажатию на клавишу).Вы сможете включать лампу или любой другой светильник с компьютера!
Немного модернизировав программу, получаем второй исходник: /svetom/lamp_2.0.rar (эта программа следит за файлом, который может изменяться php-скриптом lamp2.php на локальном веб-сервере).Теперь мы сможем включить нашу любимую лампу с любой точки планеты, где есть Интернет.
Удачи !
sdelaysam-svoimirukami.ru
УПРАВЛЕНИЕ НАГРУЗКОЙ ЧЕРЕЗ USB
В наше время в каждой мастерской по ремонту электротехники, да, в прочем, и у каждого радиолюбителя рабочий день начинается с включения ПК, а уж потом и вспомогательного электрооборудования. В прочем с включения ПК рабочий день начинается не только у радиолюбителей, но и во многих пользователей сего «девайса», плотно вошедшего в нашу жизнь. А вот каждый день включать утром и выключать вечером, ну, предположим, принтер, активные колонки, настольную лампу да мало ли чего можно встретить у рядового пользователя, немножко надоедает. Исходя из условленных задач была поставлена цель создать коммутатор нагрузки, предназначенный для включения-выключения всех сопутствующих устройств. Соглашусь можно пойти по пути наименьшего сопротивления и поставить на всё обыкновенный выключатель, но, похоже, это не путь для радиолюбителя. Мы будем делать гораздо удобнее – встроим автомат в сетевой фильтр:

Так как устройство отслеживает факт включения-выключения устройства по принципу «ведомый-ведущий» самый простой способ – использовать USB порт. Обозначу сразу, при использовании USB порта устройство работает в ноутбуках и компьютерах с блоком питания, отключающем все источники питания. К примеру, в последних моделях блоков питания +5 вольт USB порта присутствует как дежурное даже при выключенном блоке. С ними устройство работать не будет, точнее будет, но постоянно включено. Здесь необходимо как источник сигнала использовать какой либо иной порт, и, соответственно, согласовывать сигнал источника и исполнительного механизма.

В данном устройстве исполнительным механизмом служит реле, с контактами, рассчитаными на 16 ампер и с катушкой на 5 вольт. Использование реле выполняет гальваническую развязку источника сигнала и сети 220 вольт.

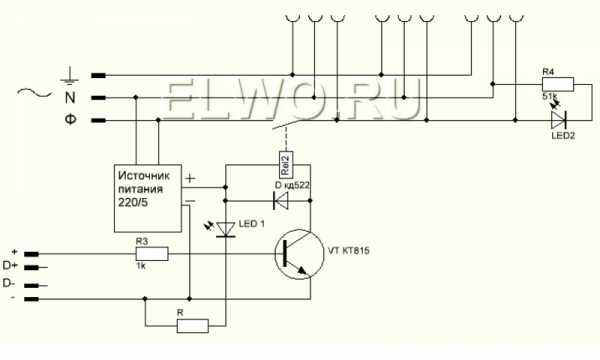
После проведения ряда экспериментов было установлено, что при питании, согласно паспортных данных, +5 вольт реле потребляет 150 мА тока. Если использовать стационарный компьютер – нет никаких проблем, ибо +5 вольт USB порта идут непосредственно с блока питания и не сильно нагружают его. Если всё вышесказанное устраивает на этом – можно остановиться и сделать свой вариант по ниже приведенной схеме.
Схема модуля USB управления сетевой нагрузкой
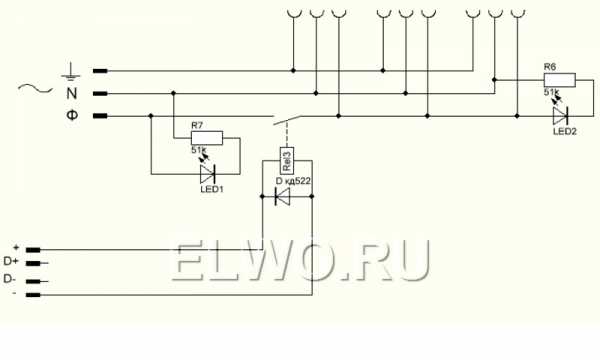
Но если планируется использовать ноутбук, то как бы прогонять дополнительные 150 мА через через компьютер не желательно, в таком случае необходимо использовать дополнительный блок питания 5 вольт. В данном варианте был использован импульсный источник питания от зарядного устройства от мобильного телефона. Можно использовать любой нестабилизированный источник питания при условии, что он может обеспечить напряжение 5 вольт и ток порядка 250 мА с учетом запаса. Также можно использовать и другое напряжение, но в таком случае необходимо будет взять и реле с соответственным напряжением питания. Для согласования источника сигнала с реле и источником питания необходимо установить транзисторный ключ типа:
Транзистор выбран типа КТ815 с любой буквой и резистор 1 кОм, диод – КД522. При такой схеме включения ток потребления показал 4 мА, что не столь существенно для ноутбука. Светодиод LED1 и LED2 обозначают состояние цепи. По желанию вместе с резисторами их можно исключить из схемы.
Устройство управления 220 В собрано в свободном месте корпуса розетки – сетевого фильтра. Файл схемы в сплане находится здесь.

Необходимо обратить внимание что розеточный бокс удлиненный. Можно взять бокс с кнопкой выключения, которую потом удалить, отверстие аккуратно зашить, и в образовавшемся пространстве установить начинку. Эксперименты проводились с нетбуком Lenovo S10-3 и дали положительный результат. С уважением, AZhila.
Форум по устройствам автоматики
Схемы для компьютеровelwo.ru
Управление внешними устройствами ПК.
Управление внешними устройствами ПК.
Программно-управляемый ввод/вывод.
Внешние устройства подключаются к системному интерфейсу через специальные устройства - контроллеры (адаптеры). Каждый контроллер имеет в своем составе ряд программно-доступных регистров (как минимум имеет хотя бы регистр данных, регистр состояния и регистр управления).
Каждый контроллер имеет свой набор команд. Получив команду от процессора, выполняющего программу ввода-вывода, контроллер отрабатывает команду автономно, управляя внешним устройством через “малый” интерфейс между устройством и контроллером. Контроллер, отрабатывая принятую от процессора команду, пересылает во внешнее устройство свои команды, данные и читает из устройства состояния, данные (команды и состояния обычно представляют собой высокий или низкий уровень напряжения в соответствующей линии “малого” интерфейса, импульс или последовательность импульсов в соответствующей линии “малого” интерфейса). Кроме того, контроллер может выполнять ряд вспомогательных аппаратных функций инициируемых аппаратными сигналами или записью управляющей информации в его программно-доступный регистр (например, сброс по сигналу RESET или включение шпиндельного двигателя гибкого диска путем записи в регистр 3F2 контроллера гибкого диска управляющей информации).
Существуют простые контроллеры и более сложные (интеллектуальные) контроллеры, выполняющие более сложные аппаратные функции и команды. Процессор управляет внешним устройством, выполняя соответствующую программу ввода/вывода, где он с помощью команд IN, OUT (чтение порта, запись в порт) имеет доступ к программно-доступным регистрам контроллера. В регистр управления процессор записывает команду, из регистра состояния читает информацию о состоянии внешнего устройства и контроллера, в регистр данных записывает выводимые на устройство данные, или читает из регистра данных считываемую с устройства информацию.
Возможны два способа организации программного обмена с внешними устройствами: обмен с опросом готовности устройства, обмен по запросам на обслуживание устройства (запросам на маскируемое прерывание).
При первом способе обмена, выполняя программу ввода-вывода, процессор запустит в контроллере операцию и циклически читает регистр состояния контроллера. Он ожидает появления (в соответствующем разряде регистра состояния) признака готовности к обмену данными с процессором. При появлении этого признака в регистре состояния процессор с помощью команды OUT осуществляет запись в регистр данных (при выводе на устройство), или выполняет чтение информации из регистра данных контроллера с помощью команды IN (при вводе с устройства). После чего запускает в контроллере следующую операцию и т. д.
При выполнении обмена по второму варианту, процессор, выполняя программу, и запустив на контроллере операцию, не ожидает готовности контролера к обмену данными. Он продолжает выполнять полезную программу. Контроллер внешнего устройства в случае полной готовности к обмену данными с процессором выдает на соответствующую линию IRQ сигнал запроса на обслуживание. Процессор через выполнение процедуры прерывания по сигналу IRQ (в ее выполнении участвуют контроллер прерываний и контроллер шины) переходит на выполнение программы ввода/вывода для данного устройства. Эта программа осуществляет обмен данными через регистр данных контроллера, запускает в контроллере следующую операцию и т. д. Процессор возвращается к выполнению прерванной программы через выполнение команды IRET (возврат из прерывания), которой заканчивается программа ввода/вывода, и т. д.
Прямой доступ (DMA).
Прямой доступ – это способ обмена между внешним устройством и динамической памятью, при котором управление операциями обмена по интерфейсу между регистром данных устройства и последовательно расположенными ячейками памяти осуществляет контроллер прямого доступа к памяти, а микропроцессор в это время свободен. Прямой доступ может осуществляться двумя способами: обычным DMA и busmastering DMA. В первом случае используется стандартный контроллер прямого доступа, который интегрирован в ICH. Во втором случае, функции аналогичные функциям контроллера выполняет аппаратура, расположенная в составе адаптера устройства (например, контроллер жестких дисков поддерживает режим Bus Master).
al-tm.ru
Устройства управления компьютером
Мышь
Манипулятор “мышь” используется для передачи позиционной информации компьютеру. В настоящее время в связи с широким распространением среды графического интерфейса пользователя (GUI Graphic User Interface), мышь стала одним из основных устройств управления компьютером.
По конструкции мыши делятся на две группы: механическиеиоптические.
Принцип действия механическихмышей следующий: шарик, вращаясь при передвижении мыши, передает вращение на два перпендикулярных валика, на концах которых расположены диски с отверстиями в виде секторов. С одной стороны каждого диска установлен светодиод, а с другой фотодатчик. При движении мыши диски вращаются со скоростью, пропорциональной скорости перемещения мыши. Лучи от светодиодов через отверстия в дисках попадают на фотодатчики, которые посылают сигнал в микропроцессор, определяющий, в каком направлении и с какой скоростью движется мышь.
Оптическиемыши используется другой способ: в ней тоже расположены две пары – светодиод и фотодатчик. В отличие от механических манипуляторов мышь, светодиоды направляют свет на специальный металлический коврик с нанесенной на него сеткой с очень мелкими углублениями. При перемещении мыши луч светодиода попадает на фотодатчик при проходе над углублением, и не попадает при переходе к другому углублению. Таким образом определяется в каком направлении и с какой скоростью движется мышь.
TrackBall
TrackBall представляет собой устройство, снабженное шариком, вращаемый пальцем руки. Шарик может быть размещен на клавиатуре персонального компьютера, что часто используется в ПК класса Notebook, Для трекбола характерна точность установки курсора на объект. У некоторых ПК класса Notebook применяют трекпоинт-манипулятор в виде рычажка. Его можно толкать в любом направлении.
TrackPad (сенсорная панель)
Сенсорная панель, по которой нужно водить пальцем. Электронные схемы фиксируют место касания и преобразуют в систему координат.
Touchpad (сенсорный экран)
Сенсорный экран обеспечивает доступ к компьютеру касанием пальца. Он присоединяется к монитору и позволяет и легко управлять компьютером.
Установка, работа и действия точно такие же, как и при работе с манипулятором мышь. Выбор или перемещение слова, изображения и объектов выполняется простым касанием экрана.
Сенсорный экран обеспечивает доступ к компьютеру касанием пальца. Он присоединяется к монитору п Прозрачная сенсорная поверхность позволяет наблюдать реакцию компьютера.
Джойстик
Для игр применяют графические манипуляторы-джойстики. Джойстики обычно имеют вид стержня, шарнирно укрепленного на подставке. Поворачивая его в ту или иную сторону можно перемещать объект на экране. На джойстике имеются одна или несколько кнопок, применяемых для ввода различных команд, выполняющих определенные действия. Сейчас выпускают новые виды джойстиков типа “LIFEJOYSTIK”. Он имеет обратную связь (при езде по камням, рукоятка джойстика начинает дребезжать; при плавании в воде джойстик тяжелеет в руке, и т.д.)
Мультимедийные манипуляторы (перчатки, костюмы и т.д.)
Например 3D (трехмерный) контроллер предназначен для ввода данных в трехмерном пространстве. Он обеспечивает оптимальное манипулирование трехмерными объектами для проектирования механики и приложений анимации, разрешая пошаговые X, Y, Z, вращательные и линейные перемещения. В 1993 году Magellan был выбран для управления роботом в пространстве в космических полетах NASA.
studfiles.net
8-канальное управление устройствами по USB с помощью ATiny2313
Как известно, существует достаточное количество интерфейсов, с помощью которых микроконтроллер (МК) может общаться с внешними устройствами. Если необходимо связать МК с персональным компьютером или ноутбуком, то с уверенностью можно сказать, что лучше всего использовать интерфейс COM-порта RS-232.
Причина такого выбора очевидна – практически все контроллеры имеют аппаратные модули UART, с помощью которых можно передавать информацию при минимальном расходе ресурсов МК. Кроме того, существует множество хорошо зарекомендовавших себя программ, предназначенных для работы с COM-портом. Поскольку сигналы МК имеют уровни TTL, для согласования с интерфейсом RS-232 необходим преобразователь уровней. Часто его выполняют на основе доступной и популярной микросхемы MAX232.
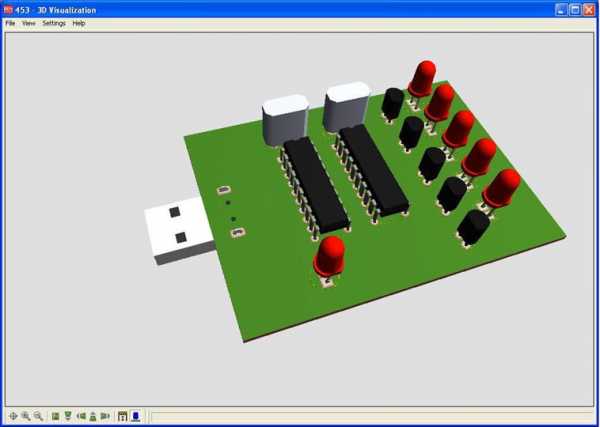
 |
| Рисунок 1. |
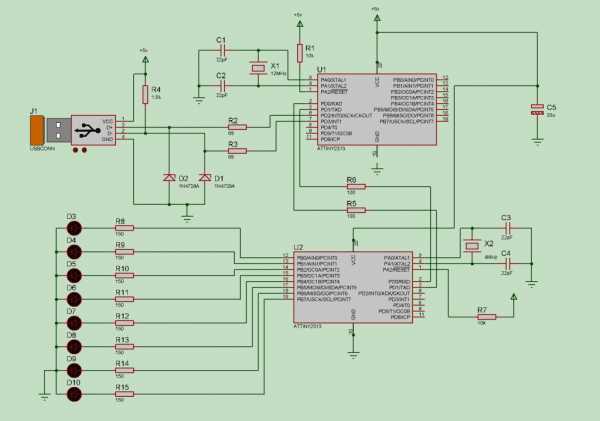
Представленное устройство (Рисунок 1) предназначено для управления приборами с помощью любого ПК, имеющего порт USB. Современные компьютеры и ноутбуки имеют по несколько таких портов. С помощью этого комплекса можно производить управление светом, телевизором и другими приборами. Исполняющие устройства не обязательно должны находиться в непосредственной близости от ПК.
Прибор состоит из вполне доступных и распространенных элементов. Обе микросхемы – микроконтроллеры ATtiny2313 семейства AVR. Первый контроллер подключен к USB-порту компьютера и выполняет функцию конвертора форматов USB-COM. Второй подключается к первому и все время сканирует команды, которые посылаются с ПК через терминальную программу Terminal v1.9b.
Подключенный к выводу 2 USB резистор R4 переводит устройство в низкоскоростной режим LS, позволяющий при обмене данными со скоростью 1.5 Мбит/с с помощью программы выполнять расшифровку посылок от ПК.
С помощью резисторов R2 и R3 происходит устранение переходных процессов. Конденсатор С5 блокирует импульсные помехи в цепи питания. Стабилитроны D1 и D2 необходимы для согласования логических уровней МК и USB входа ПК. Для безошибочной передачи данных между контроллерами частоты кварцевых резонаторов должны быть равны 12 и 4 МГц.
К выводам /RESET следует подключить подтягивающие резисторы, чтобы в дальнейшем избежать произвольного сброса МК из-за влияния помех и статических напряжений. В данной схеме все команды отображаются на светодиодах, подключенных к порту В. Чтобы управлять какими-либо устройствами, необходимо подключать выходы контроллера к реле (Рисунок 2).
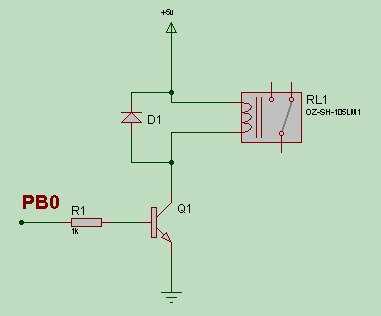 |
| Рисунок 2. |
Собрать устройство можно на макетной плате, хотя лучше, все же, на полноценной печатной плате. Элементы можно разместить, например, так, как показано на Рисунке 3.
 |
| Рисунок 3. |
Программа для микроконтроллера U1 разработана товарищем GetChiper в среде Bascom-AVR. Для работы с шиной USB использована библиотека swusb.LBX. С ее помощью выполняется программное декодирование USB протокола в режиме реального времени. Для работы устройства с ПК, нужно установить соответствующие драйверы, скопировав их на жесткий диск. При первом подключении устройство опознается и запросит драйвер. Далее нужно указать путь к папке с файлами, и все заработает.
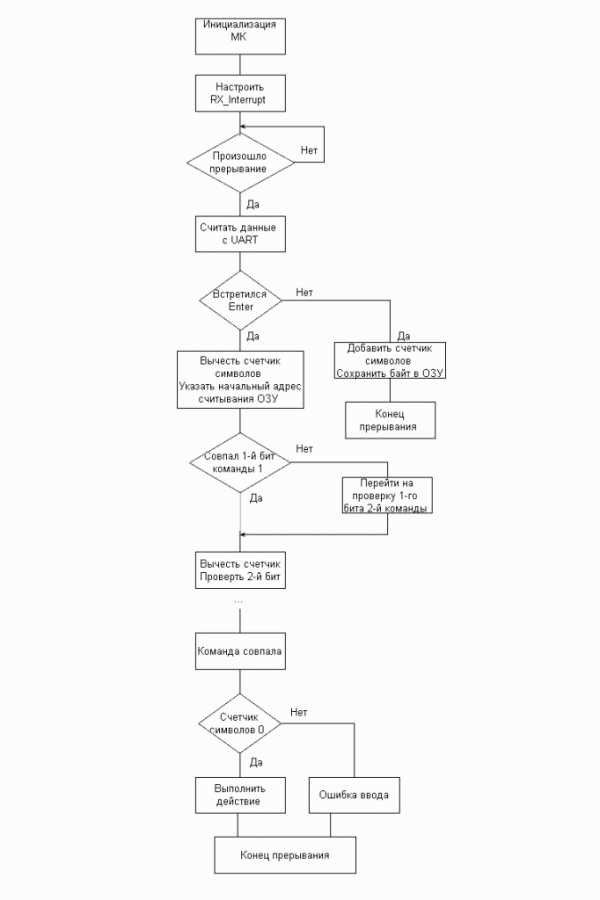 |
| Рисунок 4. |
Программа микроконтроллера U2 была написана мною в среде AVRStudio на языке ассемблера. Блок-схема алгоритма работы МК представлена на Рисунке 4. Аппаратный модуль UART следует настроить на прерывание по завершению приема данных. Сам МК не будет выполнять ни одной функции, пока не наступит прерывание. Для снижения энергопотребления можно воспользоваться режимом sleep, но в данной конструкции этого делать не понадобилось. Как только из терминала ПК последуют команды, МК мгновенно перейдет к их сканированию. На данный момент контроллер поддерживает следующую систему команд:
-on1, on2, on3, on4, on5, on6, on7, on8 – команды установки портов в «лог. 1»;
-off1, off2, off3, off4, off5, off6, off7, off8 – команды установки портов в «лог. 0»;
-ser – установить все порты в активное состояние «лог. 1»;
-clr – сбросить все порты в состояние «лог.0».
После окончания ввода каждой команды необходимо нажимать Enter. Таким образом МК сможет определить конец команды и приступить к ее сканированию. На каждую верную команду контроллер будет отвечать «ok». Если ввести неверные данные, то в терминальную строку вернется «error». Пример выполнения команды показан на Рисунке 5.
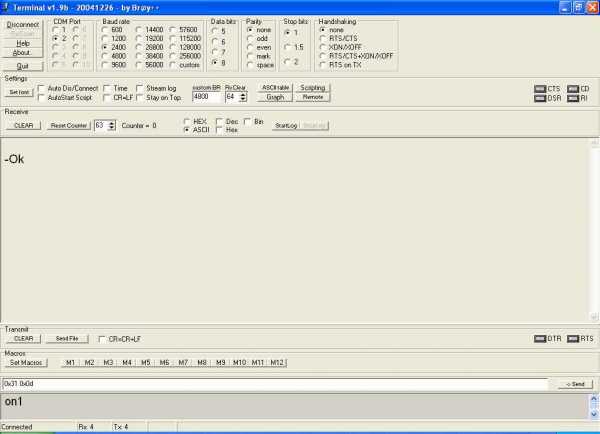 |
| Рисунок 5. |
Версия прошивки 1.0. Выставлять фьюзы необходимо в соответствии с Рисунком 6. Разрабатывается следующая версия прошивки, где будет происходить самообучение МК и изменение систем команд в терминале.
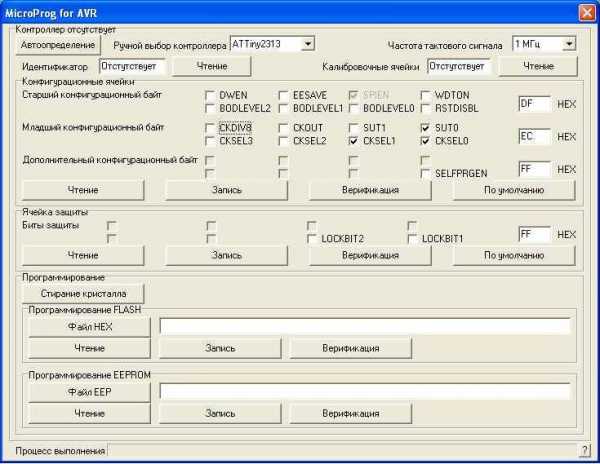 |
| Рисунок 6. |
Программное обеспечение МК, виртуальная модель Proteus и драйвер для ПК — скачать
Протокол передачи данных между МК и ПК- скачать
Автор: Захаров Денис, Украина
Возможно, вам это будет интересно:
meandr.org
