Векторное управление асинхронным двигателем | Техпривод
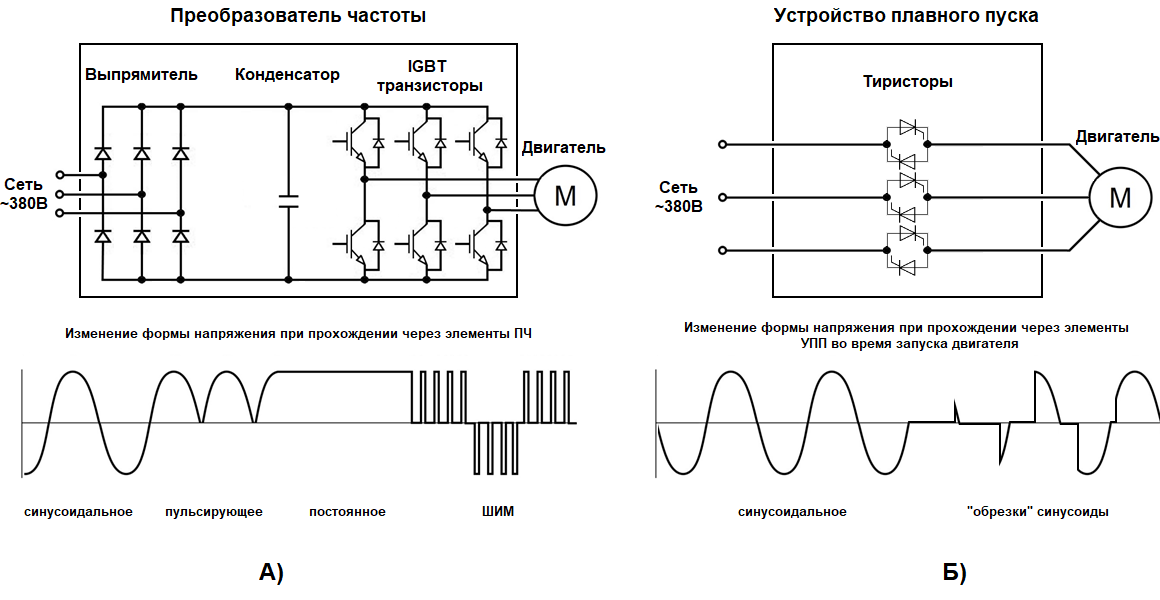
Преобразователь частоты регулирует момент и скорость вращения асинхронного двигателя, используя один из двух основных методов частотного управления — скалярный или векторный. Рассмотрим подробнее особенности этих методов.
Линейная скалярная рабочая характеристика ПЧ
При работе асинхронного электродвигателя от скалярного частотного преобразователя напряжение на двигателе понижается линейно с понижением частоты. Это происходит из-за того, что применяется широтно-импульсная модуляция (ШИМ), при которой отношение действующего напряжения к частоте является константой во всем диапазоне регулирования.
Вольт-частотная (вольт-герцовая) рабочая характеристика ПЧ будет линейной, пока напряжение на возрастет до предела, определяемого напряжением питания преобразователя. Скалярное управление не позволяет двигателю развить требуемую мощность на низких частотах (мощность зависит от напряжения), и момент на валу сильно падает.
Квадратичная скалярная рабочая характеристика
Основной минус скалярной вольт-частотной характеристики
У линейной и квадратичной вольт-частотной зависимости, при её простоте и широком распространении, есть большой минус – падение мощности на валу, а значит падение момента и частоты вращения двигателя. При этом происходит так называемое скольжение, когда частота вращения ротора отстает от частоты вращения электромагнитного поля.
Для устранения этого эффекта используется компенсация скольжения, позволяющая скорректировать выходную частоту (обороты двигателя) при возрастании момента нагрузки. Если правильно выбрать значение компенсации, фактическая скорость вращения при большой нагрузке будет приближаться к скорости вращения на холостом ходу.
Кроме этого, в большинстве ПЧ с линейной вольт-частотной характеристикой имеется функция компенсации момента на низких скоростях. Данная функция реализуется за счет повышения напряжения на низких частотах и при неправильном применении может вызвать перегрев двигателя.
Оба параметра компенсации имеют неизменное (установленное при настройке) значение и от нагрузки не зависят.
Преимущества векторного управления
Существует множество задач, когда нужно обеспечить заданную частоту вращения, и описанный недостаток становится очень актуальным. В таких случаях применяют векторное частотное управление, при котором контроллер вычисляет напряжение, необходимое для поддержания момента, обеспечивающего стабильную частоту. В отличие от скалярного режима, здесь происходит «умное» управление магнитным потоком ротора.
Векторное управление асинхронным двигателем особенно актуально на низких частотах – ниже 10 Гц, когда рабочий момент двигателя сильно падает.
Важно и то, что при векторном управлении происходит сбережение электроэнергии (в некоторых случаях – до 60%), поскольку большую часть времени частотный преобразователь передает в двигатель ровно столько энергии, сколько необходимо для поддержания заданной скорости.
Различают два вида векторного управления — без датчика скорости (без обратной связи, или бессенсорное) и с обратной связью, когда в качестве датчика, как правило, используется энкодер.
Векторное управление без обратной связи
В этом случае частотный преобразователь вычисляет скорость вращения двигателя по математической модели на основе ранее введенных данных (параметров двигателя) и данных о мгновенных значениях тока и напряжения. Опираясь на полученные расчеты, ПЧ принимает решение об изменении выходного напряжения.
Перед включением векторного бессенсорного режима необходимо тщательно выставить номинальные параметры двигателя: напряжение, ток, частоту, скорость (обороты), мощность, количество полюсов, а также сопротивление обмоток и индуктивные параметры. Если какие-то значения неизвестны, рекомендуется провести автотестирование двигателя на холостом ходу. Некоторые модели векторных преобразователей частоты устанавливают параметры по умолчанию для стандартного двигателя после введения номинальных значений. Также необходимо задать пределы временных и токовых параметров векторного управления.
Векторное управление с обратной связью
Этот режим отличается более высокой точностью управления скоростью двигателя. Обратную связь обеспечивает энкодер, который сопрягается с частотным преобразователем через дополнительный модуль.
Энкодер устанавливается на валу электродвигателя либо последующего механизма и передает данные о текущей частоте вращения. На основании полученной информации преобразователь меняет напряжение, момент и, соответственно, скорость двигателя. Стоит добавить, что при больших динамических нагрузках (частых изменениях момента) и работе на пониженных скоростях рекомендуется применение принудительного охлаждения внешним вентилятором.
На основании полученной информации преобразователь меняет напряжение, момент и, соответственно, скорость двигателя. Стоит добавить, что при больших динамических нагрузках (частых изменениях момента) и работе на пониженных скоростях рекомендуется применение принудительного охлаждения внешним вентилятором.
Другие полезные материалы:
10 типичных проблем с частотниками
Тонкости настройки преобразователя частоты
Назначение и виды энкодеров
Особенности векторного управления электроприводами. Рынок Электротехники. Отраслевой портал
Практически все электроприводы Unidrive от Control Techniques используют векторное управление двигателем, за счет которого расширяется диапазон частот, в которых может эффективно работать привод (номинальный крутящий момент развивается на частоте 1 Гц в разомкнутом контуре, 0 Гц – в замкнутом контуре). Привод Unidrive может устойчиво работать на скоростях вплоть до 0,001 об/мин, что эквивалентно одному обороту вала двигателя за 16 часов. Частота 0 Гц в замкнутом контуре фактически означает возможность привода удерживать вал двигателя в одном положении при меняющейся нагрузке.
Частота 0 Гц в замкнутом контуре фактически означает возможность привода удерживать вал двигателя в одном положении при меняющейся нагрузке.
Специфическая особенность привода Unidrive – возможность работы в режиме цифрового замка. Для этого информация об угловом положении вала двигателя одного привода (ведущего, оснащенного энкодером) передается в другой привод (ведомый). Вал ведомого двигателя начинает движение синхронно с движением вала ведущего двигателя (синхронизация может быть выполнена как по скорости, так и по положению).
При этом реализуется электронный вариант механической коробки передач. Передаточный коэффициент корректируется с точностью до 3 знаков после запятой, его можно менять динамически кнопками «больше/меньше» с помощью цифрового потенциометра. Число синхронизированных приводов не ограничено. Датчик положения (энкодер) можно ставить не только на вал двигателя, управляемого приводом Unidrive, но и на любую вращающуюся деталь, с которой нам нужно синхронизироваться. При этом отпадает необходимость в вариаторах и подобных им устройствах, которые требуют регулярного обслуживания. Для реализации режима цифрового замка Unidrive необходим модуль второго энкодера или модуль для включения в сеть CTNet. Описанные возможности применимы в робототехнике, металлообрабатывающих станках, машинах многоцветной печати и т.д.
При этом отпадает необходимость в вариаторах и подобных им устройствах, которые требуют регулярного обслуживания. Для реализации режима цифрового замка Unidrive необходим модуль второго энкодера или модуль для включения в сеть CTNet. Описанные возможности применимы в робототехнике, металлообрабатывающих станках, машинах многоцветной печати и т.д.
Режим рекуперации энергии применяется в тех случаях, когда нагрузка двигателя имеет большую механическую инерцию и способна высвобождать накопленную кинетическую энергию при торможении. При этом будет происходить отдача электроэнергии приводом обратно в питающую сеть.
Использование данного режима приводит к значительному снижению потребления энергии. Может использоваться в устройствах, обладающих большой механической инерцией и способных отдавать накопленную кинетическую энергию при торможении. В данном режиме используются два привода Unidrive, связанных по шине постоянного тока, один в двигательном режиме, другой в режиме рекуперации. При торможении двигателя энергия начинает поступать на шину постоянного тока двигателя, работающего в двигательном режиме, и передается в двигатель, работающий в режиме рекуперации, который генерирует из него переменное напряжение 380 В и отдает его обратно в сеть. В результате мы получаем экономию электроэнергии. Данный режим включается изменением значения параметра, определяющего режим работы привода.
При торможении двигателя энергия начинает поступать на шину постоянного тока двигателя, работающего в двигательном режиме, и передается в двигатель, работающий в режиме рекуперации, который генерирует из него переменное напряжение 380 В и отдает его обратно в сеть. В результате мы получаем экономию электроэнергии. Данный режим включается изменением значения параметра, определяющего режим работы привода.
1. Разомкнутый контур со скалярным управлением
Обратная связь не требуется, двигатель – стандартный асинхронный двигатель переменного тока. Скалярное управление является традиционным способом управления двигателем (в противоположность более современному способу векторного регулирования). Минимальная скорость, на которой развивается номинальный крутящий момент – 15-20Гц.
2. Векторное управление в разомкнутом контуре
Обратная связь здесь также не требуется, двигатель – стандартный асинхронный двигатель переменного тока. Векторное управление предоставляет возможность проведения специальной процедуры – автонастройки, в процессе которой привод очень точно измеряет параметры подключенного к нему двигателя: сопротивления обмоток статора, их индуктивность, индуктивность рассеивания, ток намагничивания и т.д. Векторное управление включается специальным параметром в приводе. Точность поддержания скорости 1%, минимальная скорость, на которой развивается номинальный крутящий момент – 1 Гц.
Векторное управление предоставляет возможность проведения специальной процедуры – автонастройки, в процессе которой привод очень точно измеряет параметры подключенного к нему двигателя: сопротивления обмоток статора, их индуктивность, индуктивность рассеивания, ток намагничивания и т.д. Векторное управление включается специальным параметром в приводе. Точность поддержания скорости 1%, минимальная скорость, на которой развивается номинальный крутящий момент – 1 Гц.
3. Векторное управление в замкнутом контуре
Двигатель – асинхронный двигатель переменного тока. Требует наличия датчика обратной связи по скорости/положению вала двигателя (например, инкрементального энкодера). За счет введения обратной связи точность поддержания скорости возрастает на два порядка, плюс появляется возможность управления угловым положением вала двигателя. Становится возможной работа в режиме электрического вала, когда вал двигателя вращается строго синхронно с какой-либо другой координатой, которая механически соединена с датчиком обратной связи (энкодером), подключенным к Unidrive. Точность поддержания скорости 0,01%, минимальная скорость, на которой развивается номинальный крутящий момент – 0 Гц.
Точность поддержания скорости 0,01%, минимальная скорость, на которой развивается номинальный крутящий момент – 0 Гц.
4. Серворежим
Требует серводвигателя (бесщеточного электродвигателя переменного тока с постоянными магнитами на роторе). В сочетании с таким двигателем система имеет отличные динамические характеристики (в среднем в 15-20 раз лучшие, чем в замкнутом контуре с векторным управлением). Точность поддержания скорости 0,01%, развитие номинального крутящего момента при нулевой скорости вращения. Данный режим применяется в наиболее ответственных задачах, требующих высоких динамических и точностных показателей регулирования. Режим цифрового замка (электрический вал)
Настройка всех приводов Control Techniques практически одинакова и отличается лишь в деталях, она может быть проведена как вручную (с панели управления привода), так и с помощью специального «софта», запущенного на персональном компьютере.
Удобная структура меню: Все параметры привода разбиты на функциональные группы, названные «меню». В каждом меню хранятся параметры, определяющие работу какого-либо функционального блока привода: меню 1- задание скорости, меню 2-величины ускорения/замедления и т.д. Наиболее часто используемые параметры вынесены в специальное меню – «Меню 0».
В каждом меню хранятся параметры, определяющие работу какого-либо функционального блока привода: меню 1- задание скорости, меню 2-величины ускорения/замедления и т.д. Наиболее часто используемые параметры вынесены в специальное меню – «Меню 0».
Гибкая, перестраиваемая структура привода: Большинство функций в приводе могут быть перепрограммированы пользователем в соответствии со своими потребностями. Например, сигнал, поданный на аналоговый вход, может управлять скоростью, крутящим моментом, быть прецизионным смещением, прибавляемым к заданному цифровому значению скорости, служить входным сигналом для ПИД регулятора, сравниваться компаратором с некоторым пороговым значением, по достижении которого привод меняет режим работы и т.д.
Имеется набор дополнительных модулей, расширяющих возможности приводов. Все модули относительно дешевы, не требуют дополнительного пространства для установки (устанавливаются прямо внутрь привода), не требуют подачи питания (питание поступает от привода).
Имеются следующие модули:
· Одноосевой сервоконтроллер, управляющий траекторией движения управляемого механизма. Программируется на специальном языке DPL (Drive Programming Language, основан на языке BASIC), обеспечивающем точное управление позицией вала двигателя в реальном масштабе времени.
· Модули для включения привода в промышленные сети Profibus, Interbus, Device Net, CTNet, Modbus +, SLM, CANopen, SERCOS, CAN, Ethernet
· Модули для подключения дополнительных входов/выходов
· Модули для подключения дополнительных внешних устройств (внешнего энкодера от ведущего привода) или альтернативного датчика обратной связи.
Встроенный ПИД регулятор: имеет входы для подачи заданного значения (уставки) и текущего значения контролируемого параметра. На эти входы могут быть поданы сигналы от любого источника: аналоговый вход (обычно сигнал от датчика), цифровое значение, выход от автоматического потенциометра, значение, переданное по сети и т. д.
д.
Встроенные логические функции: две операции логического «и» с возможностью инвертирования всех входов и выходов позволяют реализовать любые логические функции: И, И-НЕ, ИЛИ, ИЛИ-НЕ, НЕ. На выходе функций встроена задержка переднего фронта полученного сигнала, позволяющая проверить наличие сигнала в течение некоторого времени (для исключения ложных срабатываний и т.д.). На входы функций можно подать любой цифровой сигнал, существующий внутри или снаружи привода.
Типичный пример использования такой функции: если скорость двигателя меньше 1 об/мин (сигнал сравнения поступает от компаратора), ток двигателя больше 130% от номинального (сигнал сравнения поступает со второго компаратора).
И если эта ситуация продолжается более трех секунд (включена задержка переднего фронта на три сек.), то необходимо остановить двигатель, так как такая ситуация характерна для механического заклинивания вала.
Встроенные входы/выходы: все приводы имеют несколько цифровых и аналоговых входов и выходов (в среднем по три каждого типа), режимы аналоговых входов(4-20 мА, 0-20 мА, +/-10 В) и цифровых (положительная или отрицательная логика управления, выход +24 В или выход с открытым коллектором), которые свободно программируются. Число входов/выходов в приводах Control Techniques больше, чем в приводах других производителей, причем некоторые клеммы могут быть запрограммированы на работу, как в качестве входа, так и выхода.
Число входов/выходов в приводах Control Techniques больше, чем в приводах других производителей, причем некоторые клеммы могут быть запрограммированы на работу, как в качестве входа, так и выхода.
Кроме стандартных функций, которые обычно выполняют цифровые входы в приводах всех производителей (старт/стоп привода, выбор направления вращения, сброс ошибки привода), в приводах Control Techniques входы могут использоваться для:
· выбора номера используемой предустановленной скорости (всего до 8 предустановок)
· включения/выключения функциональных блоков: ПИД регулятор, компаратор, логические функции, аналоговые входы, автоматический потенциометр.
Векторное управление для чайников — Switchcraft
Эта статья объяснит, как векторное управление работает дружественным и безопасным способом. Однако сначала нам нужно уточнить, что мы подразумеваем под управлением при обсуждении моторных приводов:
Управлять или не управлять
Представьте, что вы выгуливаете свою собаку Фидо в парке.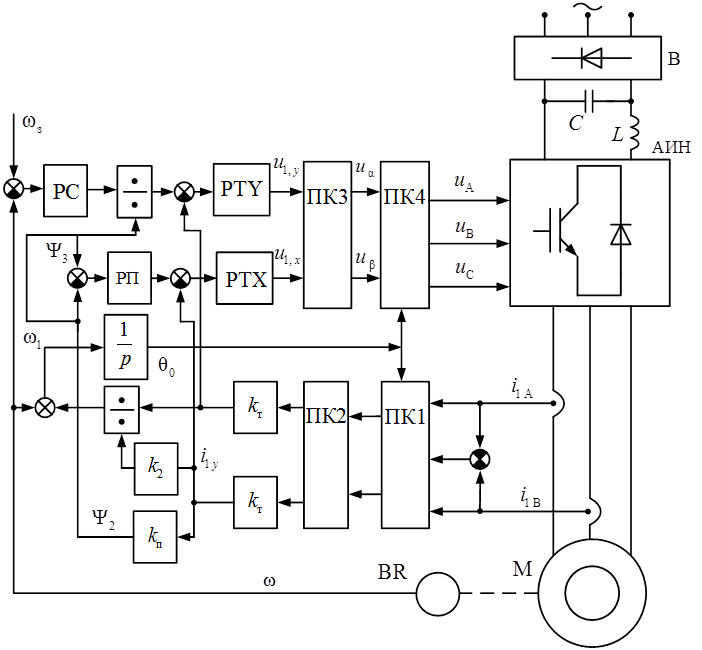
У вас есть поводок, привязанный к Фидо, так что он может шнырять, как хочет, на своем поводке. При этом он будет следовать примерно по тому же маршруту, что и вы. Вы можете подумать, что вашей собаке меньше 9 лет.0003 контроль, верно? Ну, не так уж и много. Этот сценарий будет называться Scalar Control в домене моторных приводов.
Скалярное управление означает, что вы не управляете двигателем точно, но имеете довольно хорошее представление о том, что он делает. Инвертор снабжает электродвигатель напряжением и частотой, и двигатель будет реагировать на этот вход так же, как Фидо на поводке.
Теперь давайте приклеим Fido к скейтборду и заменим поводок на стальной стержень.
Теперь Фидо будет перемещать ровно на , как вы хотите, дюйм за дюймом. Это Vector C , управление . Для моторного привода это означает, что контроллер знает положение ротора в любое время и будет создавать новое магнитное поле, толкающее ротор в нужном направлении несколько сотен (или тысяч) раз в секунду. Скалярное управление, с другой стороны, не имеет представления о положении ротора и только предоставляет двигателю заданное значение скорости, которому двигатель должен следовать настолько хорошо, насколько это возможно, с учетом колебаний нагрузки и других возмущений.
Скалярное управление, с другой стороны, не имеет представления о положении ротора и только предоставляет двигателю заданное значение скорости, которому двигатель должен следовать настолько хорошо, насколько это возможно, с учетом колебаний нагрузки и других возмущений.
Итак, теперь, когда мы прояснили эту часть, мы собираемся объяснить, как именно и что делает Vector Control.
Выявление магнитного поля ротора
Наиболее важной частью векторного управления является определение положения ротора. Под положением я подразумеваю не то, что ротор физически расположен внутри статора, а то, в каком направлении направлено магнитное поле ротора. Видите ли, когда асинхронная машина (АД) намагничена, в роторе возникают индуцированные (doh) напряжения и токи, которые создают магнитные поля. Суммируя все магнитные поля тока, будет NET поле, указывающее в заданном направлении. Это направление важно, так как оно определяет, где инвертор должен размещать магнитное поле статора , чтобы еще больше толкать ротор.
Для синхронных машин с постоянными магнитами (СДПМ) магнитное поле в большей или меньшей степени определяется магнитами ротора и остается постоянным большую часть времени (ослабление поля я объясню в другой раз). Тем не менее, его необходимо определить, и это выполняется одинаково как для асинхронных машин, так и для СДПМ.
Фактическое направление магнитного поля определяется электродвижущей силой двигателя (ЭДС), которая индуцируется в обмотках статора полем ротора. Эта ЭДС будет вести себя как источник напряжения, подключенный последовательно с сопротивлением ротора/индуктивностью рассеяния и параллельно с индуктивностью намагничивания. Если известны параметры двигателя (сопротивление статора/ротора и индуктивность намагничивания), можно оценить значение ЭДС. Это значение является вектором, то есть имеет величину и (*фанфары*) направление , указывающее в ту же сторону, что и чистое магнитное поле ротора.
Это направление используется, когда контроллер собирается отображать магнитное поле в статоре. Поле статора предназначено для притяжения ротора так же, как обычные магниты притягивают друг друга. Также возможно оттолкнуть ротор, но в этом случае вместо этого магнитное поле используется позади ротора, преследуя его примерно так же, как собака гоняется за своим хвостом.
Поле статора предназначено для притяжения ротора так же, как обычные магниты притягивают друг друга. Также возможно оттолкнуть ротор, но в этом случае вместо этого магнитное поле используется позади ротора, преследуя его примерно так же, как собака гоняется за своим хвостом.
Обратите внимание, что приведенное выше описание не полностью охватывает науку определения направления поля ротора. Дальнейшие методы будут подробно описаны в отдельной статье.
Оптимальный угол между магнитными полями статора и ротора
Когда магнитное поле ротора определено, пришло время решить, куда приложить наше собственное магнитное поле, чтобы далее двигать ротор в желаемом направлении.
Допустим, поле ротора расположено под углом 90 градусов. Это означает, что северный полюс направлен прямо вверх (для простоты в двухполюсной машине).
Теперь, где мы должны поместить поле статора, чтобы подтолкнуть ротор в нужном направлении?
Основная цель — создать крутящий момент, поэтому мы хотим разместить поле статора в направлении, при котором я получаю наибольшее приложение крутящего момента к ротору. Я также не хочу, чтобы платили силы тока больше, чем мне абсолютно необходимо. Ток является ограниченным ресурсом, поскольку цены на компоненты инвертора основаны на их номинальном токе.
Я также не хочу, чтобы платили силы тока больше, чем мне абсолютно необходимо. Ток является ограниченным ресурсом, поскольку цены на компоненты инвертора основаны на их номинальном токе.
Итак, получается, что наибольший крутящий момент на ампер достигается, когда магнитное поле статора ориентировано перпендикулярно ротору. В нашем случае либо на 180, либо на 0 градусов, в зависимости от того, в каком направлении вы хотите двигать ротор.
Вполне возможно выровнять поле статора, например, всего на 10 градусов от поля ротора, но создаваемый крутящий момент будет намного ниже, а ток почти такой же. Не очень хорошая сделка, так что давайте придерживаться разделения на 90 градусов между двумя полями.
Рабочий процесс векторного управления
Частью векторного управления управления обычно является ПИ- или ПИД-регулятор, который управляет двумя основными параметрами:
Крутящий момент, указанный как сумма активный ток
Магнитное поле (поток), заданное как реактивный ток.

Хотя в двигатель втекают три тока, их можно разложить на два разных ортогональных тока точно так же, как полная мощность делится на активную и реактивную мощность.
Это преобразование трехфазных токов в ток, создающий крутящий момент, и ток, создающий поток, известно как преобразование Кларка и выглядит следующим образом:
\begin{equation}
i_{\alpha} = \frac{3}{2} \cdot i_{U}
\end{equation}
\begin{equation}
i_{\beta} = \frac {\sqrt{3}}{2} \cdot i_{V} – \frac{\sqrt{3}}{2} \cdot i_{W}
\end{equation}
, где \( i_{U} \), \( i_{V}\) и \( i_{W}\) представляют собой трехфазные токи, выходящие из инвертора, а \( i_{\alpha}\) и \( i_{\beta}\) представляют два «новых» тока для крутящего момента и потока соответственно.
Хотя это большой шаг вперед в управлении крутящим моментом и магнитным потоком, остается еще одна проблема. Видите ли, токи по-прежнему синусоидальны, и ПИ (или ПИД) регулятору будет очень трудно контролировать эти значения; они постоянно меняются. Для работы регулятору требуется вход в установившемся режиме.
Для работы регулятору требуется вход в установившемся режиме.
Но подождите. Контроллер уже знает положение ротора, верно? Используя эту информацию, можно «отменить» синусоидальные волны, используя несколько триггерных функций для компенсации синусоидального движения токов.
Этот трюк называется Park-transformation , и, по сути, позволяет контроллеру наблюдать за ротором с точки зрения устойчивого состояния, вместо того, чтобы наблюдать за его вращением с точки зрения статора. Терминология этого «движение от стационарная система отсчета в вращающуюся систему отсчета” .
Это можно сравнить с попыткой зафиксировать лошадь на карусели, когда она вращается, а вы стоите на земле рядом с ней. Было бы намного проще просто запрыгнуть на карусель и прицепиться к лошади, стоя перед ней, не так ли?
Преобразование Парка преобразует два переменных тока в устойчивые постоянные токи и упрощает управление контроллером машина с помощью обычного ПИ- или ПИД-регулятора.
Когда выход готов, преобразование Парка и Кларка можно обратить, прежде чем подавать новые токи на двигатель с помощью модулятора напряжения (см. собственную статью о широтно-импульсной модуляции с пространственным вектором).
\begin{equation}
i_{q} = -i_{\alpha} \cdot \sin{\Theta_{d}}+ i_{\beta} \cdot \cos{\Theta_{d}}
\end {уравнение}
\begin{уравнение}
i_{d} = i_{\alpha} \cdot \cos{\Theta_{d}}+ i_{\beta} \cdot \sin{\Theta_{d}}
\end{equation}
где \(i_{q}\) и \(i_{d} \) представляют собой постоянные токи, создающие крутящий момент и поле, а \(\Theta\) – угол ротора.
Весь рабочий процесс показан ниже.
Векторное управление — это очень распространенный способ управления электродвигателем с помощью измерений тока и напряжения. Эти измерения используются для определения положения ротора и расчета нового набора трехфазных напряжений, которые подаются на клеммы двигателя. Это, в свою очередь, создаст новое магнитное поле, которое немного сдвинет ротор, прежде чем будет проведено новое измерение, и процесс повторится.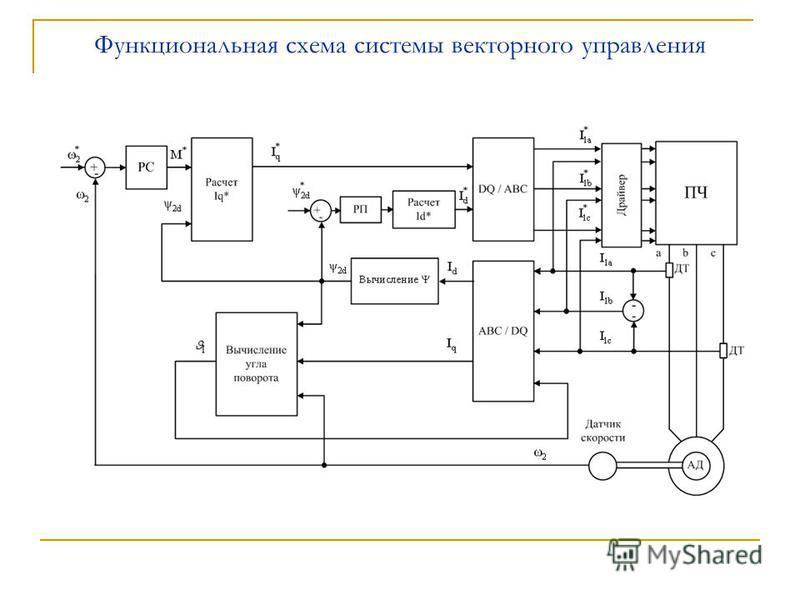
Реактивный ток, используемый для создания магнитного поля (нет данных в машинах с ПМ)
Активный ток, используемый для создания крутящего момента для вращения ротора
Реактивный ток почти постоянен и контролируется регулятором потока. Обычно он применяется перед любым током, создающим крутящий момент, при запуске машины.
Однако, если требуется ослабление поля, реактивный ток уменьшается.
Реактивный ток составляет от 25% до 35% номинального тока машины. Следовательно, даже при отсутствии скорости или крутящего момента в машине всегда будет присутствовать такое количество тока. Поскольку поток потока является почти чисто реактивным, его невозможно измерить на шине постоянного тока или на стороне линии инвертора. Он все еще существует в переключателях (транзисторах), но компенсируется на стороне постоянного тока.

Активный ток используется для управления скоростью, мощностью или крутящим моментом. Важно понимать, что независимо от того, находится ли задание в скорости или в мощности, по-прежнему контролируется крутящий момент . Например. если скорость слишком низкая: примените больший крутящий момент.
Крутящий момент напрямую зависит от величины активного тока. Что снова определяется напряжением:
Более высокое напряжение -> больший ток -> больший крутящий момент -> повышенная скорость и/или мощность.При управлении машиной привод должен знать, где находится ротор. То есть, в каком направлении «указывает» поток в роторе. Это должно быть оценено с помощью математических моделей и измерений напряжения и тока. Он также может быть задан кодировщиком.
Преобразователь частоты управляет двигателем, применяя вектор напряжения относительно вектора потока ротора.
 Если представить машину в виде часов, можно представить, что поток ротора указывает на положение «1 час». Затем преобразователь частоты должен подать вектор напряжения на 12 часов, чтобы создать магнитное поле в статоре, чтобы «преследовать» ротор. (В практических приводах вектор статора обычно расположен 90° впереди или позади вектора ротора, так как это дает максимальный крутящий момент на ампер)
Если представить машину в виде часов, можно представить, что поток ротора указывает на положение «1 час». Затем преобразователь частоты должен подать вектор напряжения на 12 часов, чтобы создать магнитное поле в статоре, чтобы «преследовать» ротор. (В практических приводах вектор статора обычно расположен 90° впереди или позади вектора ротора, так как это дает максимальный крутящий момент на ампер)
Описанная выше процедура повторяется снова и снова очень быстро:
Измерение тока и напряжения на основе вышеуказанных измерений и модели напряжения и/или тока.
Преобразование измеренных значений в реактивную/активную часть в кадре постоянного тока (преобразование Кларка/парка)
Рассчитать, в каком положении применить вектор напряжения статора (90° от ротора)
Применить векторы напряжения (с учетом того, что положение ротора изменилось с момента шага 1).
Пуск свыше
Выходное напряжение и частота должны изменяться пропорционально.
 Величина потока в машине определяется соотношением между напряжением и частотой (U/f). Поскольку мы хотим поддерживать постоянный поток, необходимо линейно изменять напряжение и частоту, т. е. 30% скорости = 30% частоты = 30% напряжения. Причина такой зависимости в том, что реактивное сопротивление индуктивности обмотки зависит от частоты; \( X_L = 2 π f \)
Величина потока в машине определяется соотношением между напряжением и частотой (U/f). Поскольку мы хотим поддерживать постоянный поток, необходимо линейно изменять напряжение и частоту, т. е. 30% скорости = 30% частоты = 30% напряжения. Причина такой зависимости в том, что реактивное сопротивление индуктивности обмотки зависит от частоты; \( X_L = 2 π f \) Поскольку напряжение в двигателе очень низкое при низких скоростях (ниже 3 Гц), становится все труднее получать правильные измерения напряжения из-за помех и резистивных падений напряжения в кабелях и обмотках. Это затрудняет управление двигателем, и вместо него требуется энкодер. С помощью энкодера преобразователь частоты может точно управлять двигателем даже при частоте 0 Гц (например, удерживая неподвижно подвешенный груз в лебедке).
Векторное управление асинхронным двигателем
Единственная идея, лежащая в основе векторного управления асинхронным двигателем, заключается в том, чтобы иметь электрический привод, который должен обеспечивать более высокие характеристики, чем широко используемые в промышленности двигатели постоянного тока с независимым возбуждением.
Привод асинхронного двигателя с короткозамкнутым ротором с векторным управлением или управлением, ориентированным на поле, обеспечивает высокий уровень динамических характеристик, а управление с обратной связью, связанное с этим приводом, обеспечивает долговременную стабильность системы. Несмотря на то, что между скалярным и векторным управлением нет существенной разницы, последнее обладает некоторыми свойствами, которые делают его предпочтительным в качестве системы управления с высокими динамическими характеристиками. Векторное управление также называется независимым или развязанным управлением, при котором контролируются векторы крутящего момента и магнитного потока.
Векторное управление также называется независимым или развязанным управлением, при котором контролируются векторы крутящего момента и магнитного потока.
Общеизвестно, что в режиме векторного управления привод короткозамкнутого двигателя линеаризуется и ведет себя как полностью компенсированный двигатель постоянного тока с независимым возбуждением, в котором управление током якоря напрямую влияет на электромагнитный момент, развиваемый приводом. Точно так же в клеточном двигателе метод векторного управления, два тока в квадратуре, ответственные за создание потока и крутящего момента, соответственно, контролируются независимо, и реакция составляющей тока, создающей крутящий момент, очень быстрая, что обеспечивает более быстрое управление крутящим моментом и, следовательно, привод демонстрирует высокий уровень динамических характеристик.
В широком смысле управление асинхронным двигателем с короткозамкнутым ротором таким образом, чтобы он вел себя как полностью компенсированный двигатель постоянного тока с независимым возбуждением, называется его вектором.
Для независимого управления крутящим моментом и магнитным потоком (тем самым скоростью) в асинхронном двигателе необходимо контролировать величину и фазу трех токов статора (i as , i bs , i cs ) через быстрый инвертор. Для этой цели обычно используется CC-VSI (инвертор источника напряжения с регулируемым током). Такой алгоритм управления был бы очень сложным.
Используется трехфазное преобразование в двухфазное (известная матричная операция). Двухфазные токи i 
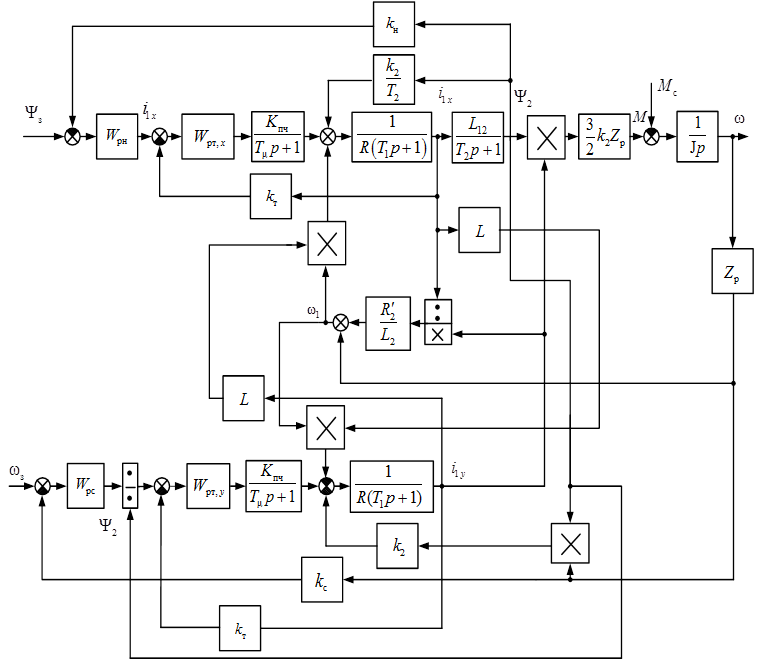
Метод векторного управления асинхронным двигателем в виде блок-схемы показан на рис. 11.63. Ниже приведены некоторые важные шаги.
Из сигнала скорости двигателя (ω r ) и заданной скорости (ω * r ) определяется ошибка ω e . Регулятор скорости вычисляет крутящий момент двигателя (T или ) требуется для корректировки скорости , которая проходит через ограничитель для определения сигнала крутящего момента T * .
В параллельном блоке ослабления поля скорость двигателя ω r генерирует другой сигнал.
Эти два сигнала используются для расчета i * ds и i * qs (идеальные квадратурные токи) и коррекции скорости ω * 2 .
ω = ω r + ω * r интегрируется, что затем используется для нахождения преобразования e jψ . Это преобразование, выполненное на (i * ds , i * qs ), дает окончательное идеальное множество (i * dss , i * 4s 91290).
2/3 phase transformation on (i * dss , i * qss ) yields the ideal stator current (i * as , i * bs , i * кс ).
Измеренные токи статора (I AS , I BS , I CS ) сравниваются с (I * AS , I * 0, , , , , , , , , , , , , , , , , , , . контроллером тока, а шесть генерируемых сигналов управляют токами, подаваемыми на асинхронный двигатель.
Выше приведено упрощенное объяснение алгоритма векторного управления для управления асинхронным двигателем.
В векторном управлении асинхронным двигателем поток ротора регулируется посредством управления током обмоток статора. Для регулирования потока ротора также желательно знать его положение. Положение потока ротора либо определяется, либо оценивается.