
Типы асинхронных электродвигателей
Асинхронные электродвигатели применяются в самых различных областях по причине отличных эксплуатационных характеристик и особых качеств продукции. К основным их особенностям можно отнести независимость частоты вращения от поступающей нагрузки и широкую сферу применения.
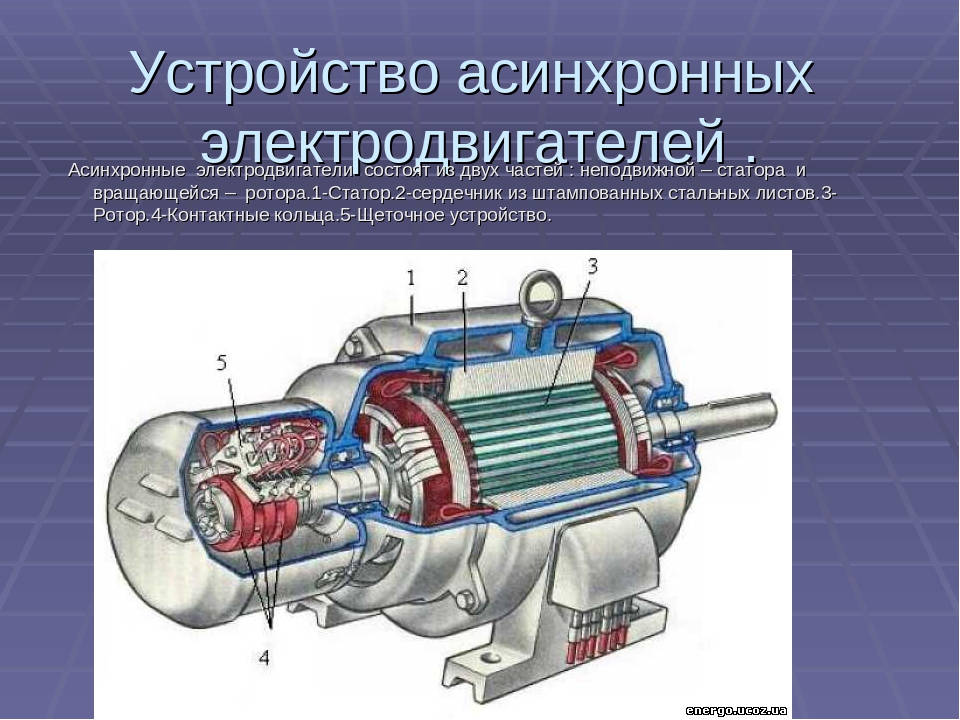
Конструкционные особенности асинхронных электрических двигателей
Асинхронные электродвигатели состоят из статора и ротора, где внутренняя часть – ротор, который при вращении несет обмотку. Корпус прикрывает внутренние детали и защищает двигатель от попадания различных посторонних предметов, а также в некоторой степени от пыли и влаги, но не на 100%.
Внутри статора имеются пазы, которые выполняют роль магнитопровода. В них поэтапно уложены секции обмотки, фазы которой соединяются по типу звездочки или треугольника. Обе детали выполнены из прочных листов штампованной стали, толщина которых примерно 5 мм, минимум 3 мм. В машинах с большой мощностью используются двигателя, зазор в которых от 1 до 1,5 мм, соответственно, в маленьких он может составлять менее 3 мм.
Типы асинхронных двигателей
Асинхронные двигатели подразделяются на два типа:
- С короткозамкнутым ротором;
- Фазным ротором.
На электродвигателях имеется статорная обмотка – стержни, замкнутые с торцов двумя кольцами. Обмотка электродвигателей с фазным ротором соединена в форме звезды, такой вид называют с контактными кольцами – в конце обмотки три кольца из меди.
Асинхронные электродвигатели действуют практически по одному принципу: на обмотку подается напряжение, которое образует вращающее магнитное поле. Оно воздействует на обмотку, что создает электрическое поле. Все это ведет к вращению механизмов и образованию движения.
Купить различные типы асинхронных электродвигателей можно в нашей компании по привлекательной цене. Вся продукция подлежит сертификации и соответствует ГОСТ. Мы даем гарантию на всю продукцию, которая имеется у нас в наличии и под заказ.
Вам помогут выбрать подходящий электродвигатель наши консультанты по тел. (495) 668 32 90.
(495) 668 32 90.
Просмотров: 3163
Дата: Пятница, 06 Сентябрь 2013
Асинхронные электродвигатели. Виды и устройство. Работа
Асинхронные электродвигатели были изобретены в 1889 году. В настоящее время выпускается большой спектр электрических двигателей. Из них наибольшую популярность приобрел электродвигатель асинхронного типа, трехфазный. Половина всей электроэнергии в мире расходуется такими электродвигателями. Они нашли широкое использование во многих отраслях промышленности, в быту, электроинструменте, так как имеет невысокую стоимость, повышенную надежность, простое обслуживание и эксплуатацию.
Область использования таких электромашин становиться все шире, так как их конструкция совершенствуется. В переводе с английского такой электродвигатель называют индукционным. И это легко объяснить, так как это вид моторов, в котором явление индукции применяется для создания полюсов, другими словами, применяются наводки для образования движущей силы. Особенностью асинхронных двигателей является отличие частоты поля от скорости вращения вала. В других типах двигателей используются постоянные магниты, обмотки и т.д.
Особенностью асинхронных двигателей является отличие частоты поля от скорости вращения вала. В других типах двигателей используются постоянные магниты, обмотки и т.д.
Устройство
Асинхронные электродвигатели состоят из:
- Ротора.
- Статора.
Статор, состоит из основных частей:
- Корпус. Служит для образования соединений деталей мотора. При малом размере мотора корпус цельнолитой. Материал изготовления – чугун. Могут использоваться сплавы алюминия, либо сталь. Часто в небольших двигателях функцию сердечника выполняет корпус. В больших моторах со значительной мощностью корпус имеет сварную конструкцию.
- Сердечник. Эта деталь запрессована в корпус, и предназначена для повышения магнитной индукции, изготовлена из электротехнической стали в виде пластин. Для уменьшения потерь, возникающих при вихревых токах, сердечник покрывается лаком.
- Обмотка.
 Она расположена в пазах сердечника. Для ее намотки применяется медная проволока, секциями, соединенными между собой по определенной схеме. Витки образуют 3 катушки, которые по сути дела играют роль обмотки статора. Эта обмотка первичная, непосредственно к ней подключается питание.
Она расположена в пазах сердечника. Для ее намотки применяется медная проволока, секциями, соединенными между собой по определенной схеме. Витки образуют 3 катушки, которые по сути дела играют роль обмотки статора. Эта обмотка первичная, непосредственно к ней подключается питание.
Ротор:
- Ротор – элемент двигателя, находящийся во вращении, предназначен для трансформации магнитного поля в энергию движения, состоит из частей:
- Вал. Подшипники вала находятся на его хвостовиках. При сборке двигателя подшипники запрессовываются, фиксируются болтами к крышкам корпуса.
- Сердечник. Его сборку производят на валу двигателя. Он состоит из металлических пластин электротехнической стали, которая обладает свойством малого сопротивления магнитному полю. Форма сердечника в виде цилиндра используется для укладки катушки якоря, которая называется вторичной. Она получает энергию от магнитного поля, появляющегося вокруг обмоток статора при подаче питания.
- С короткозамкнутым ротором.
Такой тип двигателя оснащен обмоткой в виде алюминиевых стержней, расположенных в пазах сердечника. На торце ротора они замыкаются между собой кольцами.
- С ротором, оснащенным контактными кольцами.
Оба типа моторов имеют схожую конструкцию статора. Разница состоит лишь в конструкции якоря.Классификация по числу фаз
Асинхронные электродвигатели трехфазные являются основными типами моторов. Они оснащены 3-мя обмотками на статоре, смещены на 120 градусов, соединены между собой треугольником, либо звездой, получают питание от трех фаз переменного тока.
Асинхронные электродвигатели небольшой мощности чаще всего изготавливаются двухфазными. Они отличаются от 3-фазных моторов оснащением 2-мя обмотками на статоре, которые смещены между собой на угол 90 градусов.
В случае равенства токов по модулю, и их сдвигу по фазе на 90 градусов, действие мотора не будет иметь отличия от 3-фазного двигателя. Но такие типы двигателей чаще подключаются от однофазной сети, а искусственный сдвиг на 90 градусов образуется за счет конденсаторов.
Но такие типы двигателей чаще подключаются от однофазной сети, а искусственный сдвиг на 90 градусов образуется за счет конденсаторов.
Асинхронные электродвигатели однофазные оснащаются единственной обмоткой на статоре. Они практически не могут работать. Когда вал электродвигателя неподвижен, то при подаче питания образуется только импульсное магнитное поле, а момент вращения равен нулю. Но если ротор у такого электродвигателя принудительно раскрутить, то он сможет функционировать и приводить в действие какой-либо привод механизма.
В таком случае пульсирующее поле складывается из 2-х симметричных полей: прямого и обратного. Они образуют разные моменты: один двигательный, другой тормозной. Но двигательный момент получается больше тормозного, возникающего вследствие токов ротора высокой частоты.
В связи с этим 1-фазные моторы оснащаются второй обмоткой, применяющейся в качестве пусковой. В ее цепи для сдвига фаз подключают конденсаторы. Их емкость имеет значительную величину, и может достигать нескольких десятков мкФ при маломощном моторе, меньше 1000 ватт.
В управляющих системах применяют 2-фазные асинхронные электродвигатели, получившие название исполнительных. Они оснащены двумя обмотками статора, которые имеют сдвиг фаз на 90 градусов. Одна обмотка (возбуждения) питается от сети 50 герц, а вторая применяется в качестве управляющей.
Чтобы образовалось магнитное поле с вращающим моментом, ток в управляющей обмотке должен иметь сдвиг 90 градусов. Для регулировки скорости мотора изменяют значение тока в этой обмотке, либо меняют угол фазы. Реверсивное движение обеспечивается сменой фазы в обмотке управления на 180 градусов, с помощью переключения обмотки.
2-фазные асинхронные электродвигатели производятся в разных исполнениях:
- Короткозамкнутым ротором.
- Полым магнитным ротором.
- Полым немагнитным ротором.
Чтобы преобразовать движение вращения в поступательное движение, необходимо применение определенных механизмов. Поэтому при необходимости двигатель конструктивно выполняют таким образом, что его ротор сделан в виде бегунка с линейными движениями.
В таком случае двигатель получается развернутым. Обмотка статора такого мотора сделана, как и у обычного двигателя, но она должна быть уложена на всей длине перемещения бегунка (ротора) в пазы. Такой ротор в виде бегунка чаще бывает короткозамкнутым. К нему присоединен привод механизма. На краях статора располагают ограничители, которые не дают ротору выходить за определенные пределы.
Принцип действияЯкорь электродвигателя приводится в действие с помощью эффекта магнитного поля, возникающего в катушках статора. Для лучшего понимания принципа работы мотора, нужно освежить в памяти закон самоиндукции. Он говорит, что вокруг подключенного к питанию проводника образуется магнитное поле. Его величина прямо зависит от индуктивности проводника и потока частиц.
Также, магнитное поле образует силу, направленную в определенную сторону, которая вращает ротор мотора. Чтобы двигатель работал с достаточной эффективностью, нужно получить значительный магнитный поток. Его можно создать особой установкой первичной обмотки.
Его можно создать особой установкой первичной обмотки.
Источник напряжения выдает переменное напряжение, значит, вокруг статора магнитное поле будет с такими же свойствами, и прямо зависит от изменения тока сети. Фазы смещены между собой на 120 градусов.
Процессы в обмотке статораВсе фазы сети подключаются к катушкам статора, каждая фаза к определенной катушке. Поэтому магнитное поле будет иметь смещение на 120 градусов. Питание поступает в виде переменного напряжения, значит, вокруг катушек возникнет переменное магнитное поле.
Схема двигателя выполняется так, чтобы магнитное поле вокруг катушек постепенно менялось и переходило от одной катушки к другой. Так образуется магнитное поле с эффектом вращения. Можно определить частоту вращения, которая будет измеряться в числе оборотов вала мотора. Она вычисляется по формуле:
n = 60*f / p, где f – частота тока в сети, р – количество пар полюсов статора.
Процессы во вторичной обмотке ротора, и особенность конструкции, которую имеют асинхронные электродвигатели с короткозамкнутым ротором.
К обмотке якоря напряжение не подается. Оно возникает из-за индукционной связи с первичной обмоткой. Из-за этого и происходит действие, обратное действию в статоре. Оно соответствует закону: при пересечении проводника магнитным потоком, в нем образуется электрический ток. Магнитное поле возникает вокруг первичной обмотки от того, что к ней подключается трехфазное питание.
Совместная работа ротора и статораМы имеем асинхронный мотор с ротором, в котором протекает электрический ток по его обмотке. Этот ток станет причиной появления магнитного поля возле обмотки якоря. Но полярность потока не будет совпадать с потоком статора. А значит, и сила, которая создается им, будет противодействовать силе магнитного поля первичной обмотки, что заставит двигаться ротор, потому что на нем выполнена вторичная обмотка, а вал закреплен на подшипниках в корпусе мотора.
Разберемся в ситуации, когда взаимодействуют силы магнитных полей ротора и статора, по истечении времени. Известно, что магнитное поле первичной катушки вращается с определенной частотой. Образованная им сила будет передвигаться с такой же скоростью. Это приводит в действие асинхронный двигатель, его ротор будет вращаться вокруг своей оси.
Подключение двигателя к питаниюДля запуска электродвигателя его нужно подключить к напряжению 3-фазного тока. Выполнить такое подключение возможно двумя методами: звездой и треугольником.
Схема звездой
Здесь изображен способ соединения треугольником.
Схемы собираются в клеммной коробке, расположенной на корпусе двигателя.
Чтобы запустить электродвигатель в обратном направлении вращения, необходимо только изменить местами две любые фазы путем перебрасывания двух проводов в коробке двигателя.
Похожие темы:
Типы и виды асинхронных электродвигателей | RuAut
Асинхронные электродвигатели являются наиболее распространенными электрическими машинами переменного тока. Их работа основана на использовании вращающегося магнитного поля. Пакет статора, для уменьшения потерь на вихревые токи, набран из отдельных листов электротехнической стали. В пазах статора расположены обмотки. Переменный ток одной обмотки создает пульсирующее магнитное поле, изображаемое вектором электромагнитной индукции. Если расположить вторую обмотку перпендикулярно первой и осуществить сдвиг фазы тока в обмотках на четверть периода, то такое расположение обмоток и такой сдвиг фаз создадут круговое вращение суммарного магнитного поля в статоре двухфазного двигателя.
Их работа основана на использовании вращающегося магнитного поля. Пакет статора, для уменьшения потерь на вихревые токи, набран из отдельных листов электротехнической стали. В пазах статора расположены обмотки. Переменный ток одной обмотки создает пульсирующее магнитное поле, изображаемое вектором электромагнитной индукции. Если расположить вторую обмотку перпендикулярно первой и осуществить сдвиг фазы тока в обмотках на четверть периода, то такое расположение обмоток и такой сдвиг фаз создадут круговое вращение суммарного магнитного поля в статоре двухфазного двигателя.
В статоре простейшего трехфазного асинхронного электродвигателя три обмотки расположены под углом 120 градусов. Сдвиг фаз переменных токов в этих обмотках на треть периода, также создает вращение суммарного вектора магнитной индукции.
Продемонстрировать это можно на лабораторном эксперименте. Переменное магнитное поле возбуждает в стальном шарике вихревые токи. Взаимодействие этих токов с магнитным полем статора приводит шарик в движение по окружности статора. В электрическом двигателе подвижная часть является ротором, пакет которого также набран из отдельных изолированных листов электротехнической стали. Двигатели, в которых скорость вращения ротора никогда не достигает скорости вращения магнитного поля статора, называются асинхронные.
В электрическом двигателе подвижная часть является ротором, пакет которого также набран из отдельных изолированных листов электротехнической стали. Двигатели, в которых скорость вращения ротора никогда не достигает скорости вращения магнитного поля статора, называются асинхронные.
В асинхронных электродвигателях малой и средней мощности применяются короткозамкнутые роторы, типа беличья клетка. В современных электродвигателях беличья клетка обычно изготовляется заливкой пазов ротора расплавленным алюминием. При этом одновременно отливаются и вентиляционные лопасти. Некоторые асинхронные электродвигатели средней и большой мощности имеют фазный ротор. Концы трехфазной обмотки расположенные в его пазах, соединены с контактными кольцами. Это используется при пуске или регулировании скорости вращения электродвигателя.
Очень часто электропривод различных механизмов содержат встроенные электродвигатели, статор и ротор которых одновременно являются деталями конструкции. Например, диск пилы насажен на вал ротора, фреза фрезерного станка является продолжением вала ротора. В электродвигателях обращенной конструкции ротор располагается снаружи и одновременно является барабаном, на котором, например, располагаются ножи рубанка.
Например, диск пилы насажен на вал ротора, фреза фрезерного станка является продолжением вала ротора. В электродвигателях обращенной конструкции ротор располагается снаружи и одновременно является барабаном, на котором, например, располагаются ножи рубанка.
В вычислительной технике, системах автоматизации и в быту широко применяются двухфазные и однофазные асинхронные электродвигатели. Известно, что две взаимно перпендикулярные обмотки статора, подключенные к сети параллельно, создают неподвижное в пространстве пульсирующее, а не вращающееся магнитное поле. Если в цепь одной из обмоток включить фазосмещающее устройство, например конденсатор, произойдет сдвиг фаз тока в обмотках. Образуется эллиптическое вращающееся магнитное поле. Такие электродвигатели называются конденсаторными.
Наиболее прост по конструкции электродвигатель с расщепленным полюсом. Ротор такого электродвигателя короткозамкнутый, а статор имеет явно выраженные полюсы. Каждый полюс расщеплен пазом на две части. На одной из частей каждого полюса надето медное короткозамкнутое кольцо. Электромагнитное поле кольца, взаимодействуя с полем основной обмотки, создает сдвиг фаз магнитного потока. Такая конструкция обеспечивает образование магнитного поля вращающегося в сторону короткозамкнутого кольца.
На одной из частей каждого полюса надето медное короткозамкнутое кольцо. Электромагнитное поле кольца, взаимодействуя с полем основной обмотки, создает сдвиг фаз магнитного потока. Такая конструкция обеспечивает образование магнитного поля вращающегося в сторону короткозамкнутого кольца.
В автоматических устройствах применяются различного рода асинхронные исполнительные электродвигатели. Они, как правило, двухфазные с регулируемой скоростью вращения ротора. Весьма распространенным управляемым электродвигателем является асинхронный электродвигатель с полым немагнитным ротором. Ротор такого электродвигателя представляет собой тонкостенный медный или дюралевый стакан. А статор состоит из наружной и внутренней частей, которые набираются из листов пермаллоя. Обмотка статора располагается в пазах наружной или внутренней его частей.
Можно встретить самые разнообразные асинхронные электродвигатели мощностью от долей ватта до тысяч киловатт. Простота и надежность обеспечили асинхронным электродвигателям широкое распространение в различных отраслях промышленности и техники.
Виды асинхронных электродвигателей
- Подробности
- Категория: Электрические машины
Наибольшее распространение имеет трехфазный асинхронный электродвигатель. Электродвигатели постоянного тока и синхронные применяются редко.
Большинство электрифицированных машин нуждаются в приводе мощностью от 0,1 до 10 кВт, значительно меньшая часть — в приводе мощностью в несколько десятков кВт. Как правило, для привода рабочих машин используются короткозамкнутые трехфазные электродвигатели. По сравнению с фазным такой электродвигатель имеет более простую конструкцию; меньшую стоимость, большую надежность в эксплуатации и простоту в обслуживании, несколько более высокие эксплуатационные показатели (коэффициент мощности и коэффициент полезного действия), а при автоматическом управлении требует простой аппаратуры.
Кривые моментов М = f(S) асинхронных электродвигателей
Наряду с трехфазными асинхронными короткозамкнутыми электродвигателями основного исполнения применяются также отдельные модификации этих двигателей: с повышенным скольжением, многоскоростные, с фазным ротором, с массивным ротором и т. д. Электродвигатели с фазным ротором применяют и в тех случаях, когда мощность питающей сети недостаточна для пуска двигателя с короткозамкнутым ротором.
Механические характеристики асинхронных электродвигателей с короткозамкнутым ротором в значительной мере зависят от формы и размеров пазов ротора, а также от способа выполнения роторной обмотки. По этим признакам различают электродвигатели с нормальным ротором (нормальная беличья клетка), с глубоким пазом и с двумя клетками на роторе.
Асинхронные электродвигатели: схема, принцип работы и устройство
Асинхронный электродвигатель – это электрический агрегат с вращающимся ротором. Скорость вращения ротора отличается от скорости, с которой вращается магнитное поле статора. Это – одна из важных особенностей работы агрегата, так как если скорости выровняются, то магнитное поле не будет наводить в роторе ток и действие силы на роторную часть прекратится. Именно поэтому двигатель называется асинхронным (у синхронного показатели скоростного вращения совпадают).
Именно поэтому двигатель называется асинхронным (у синхронного показатели скоростного вращения совпадают).
В данной статье мы сфокусируемся на том, что представляет собой схема работы такого двигателя и – самое главное, насколько она эффективна при его эксплуатации.
Устройство и принцип действия
Ток в обмотках статора создает вращающееся магнитное поле. Это поле наводит в роторе ток, который начинает взаимодействовать с магнитным полем таким образом, что ротор начинает вращаться в ту же сторону, что и магнитное поле.
Относительная разность скоростей вращения ротора и частоты переменного магнитного поля называется скольжением. В установившемся режиме скольжение невелико: 1-8% в зависимости от мощности.
Асинхронный двигатель
Подробнее о принципах работы асинхронного электродвигателя – в частности, на примере агрегата трехфазного тока, вы можете прочесть здесь, на сайте, в одном из наших материалов. Далее же мы разберем, какие бывают разновидности асинхронных электрических машин.
Далее же мы разберем, какие бывают разновидности асинхронных электрических машин.
Виды асинхронных двигателей
Можно выделить 3 базовых типа асинхронных электродвигателей:
- 1-фазный – с короткозамкнутым ротором
- 3-х фазный – с короткозамкнутым ротором
- 3-х фазный – с фазным ротором
Схема устройства асинхронного двигателя с короткозамкнутым ротором
То есть, двигатели классифицируются по количеству фаз (1 и 3) и по типу ротора – с короткозамкнутым и с фазным. При этом число фаз с установленным типом ротора никак не взаимосвязано.
Ещё одна разновидность – асинхронный двигатель с массивным ротором. Ротор сделан целиком из ферромагнитного материала и фактически представляет собой стальной цилиндр, играющий роль как магнитопровода, так и проводника (вместо обмотки). Такой вид двигателя очень прочный и обладает высоким пусковым моментом, однако в роторе могут возникать большие потери энергии, а сам он может сильно нагреваться.
Какой ротор лучше, фазный или короткозамкнутый?
Преимущества короткозамкнутого:
- Более-менее постоянная скорость вне зависимости от разных нагрузок
- Допустимость кратковременных механических перегрузок
- Простая конструкция, легкость пуска и автоматизации
- Более высокие cos φ (коэффициент мощности) и КПД, чем у электродвигателей с фазным ротором
Недостатки:
- Трудности в регулировании скорости вращения
- Большой пусковой ток
- Низкий мощностной коэффициент при недогрузках
Преимущества фазного:
- Высокий начальный вращающий момент
- Допустимость кратковременных механических перегрузок
- Более-менее постоянная скорость при разных перегрузках
- Меньший пусковой ток, чем у двигателей с короткозамкнутым ротором
- Возможность использования автоматических пусковых устройств
Недостатки:
- Большие габариты
- Коэффициент мощности и КПД ниже, чем у электродвигателей с короткозамкнутым ротором
Какой двигатель лучше выбрать?
Асинхронный или коллекторный? Синхронный или асинхронный? Сказать однозначно, что определенный тип двигателя лучше, точно нельзя. В пользу асинхронных моделей говорят их следующие преимущества.
В пользу асинхронных моделей говорят их следующие преимущества.
- Относительно небольшая стоимость
- Низкие эксплуатационные затраты
- Отсутствие необходимости в преобразователях при включении в сеть (только для нагрузок, не нуждающихся в регулировании скорости)
- Отсутствие потребности в дополнительном источнике питания – в отличие от синхронных аналогов
Тем не менее, у асинхроников есть недостатки. А именно:
- Малый пусковой момент
- Высокий пусковой ток
- Отсутствие возможности регулировки скорости при подключении к сети
- Ограничение максимальной скорости частотой сети
- Высокая зависимость электромагнитного момента от напряжения питающей сети
- Низкий мощностной коэффициент – в отличие от синхронных агрегатов
Тем не менее, все перечисленные недостатки можно устранить, если питать асинхронный двигатель от статического частотного преобразователя. Кроме того, если соблюдать правила эксплуатации и не перегружать агрегаты, то они исправно прослужат длительный срок.
Но даже несмотря на то, что синхронные машины обладают довольно конкурентными преимуществами, большинство двигателей сегодня – именно асинхронные. Промышленность, сельское хозяйство, ЖКХ и многие другие отрасли используют именно их за счет высокого КПД. Но коэффициент полезного действия может значительно снижаться за счет таких параметров, как:
- Высокий пусковой ток
- Слабый пусковой момент
- Рассинхрон между механическим моментом на валу привода и механической нагрузкой (это провоцирует высокий рост силы тока и избыточные нагрузки при запуске, а также снижение КПД при пониженной нагрузке)
- Невозможность точной регулировки скорости работы прибора
Другими факторами, от которых зависит КПД асинхронного электродвигателя, являются:
- степень загрузки двигателя по отношению к номинальной
- конструкция и модель
- степень износа
- отклонение напряжения в сети от номинального.
Как избежать снижения КПД?
- Обеспечение стабильного уровня загрузки – не ниже 75%
- Увеличение мощностного коэффициента
- Регулировать напряжение и частоту подаваемого тока
Для этого используются:
- Частотные преобразователи – они плавно изменяют скорость вращения двигателя путем изменения частоты питающего напряжения
- Устройства плавного пуска – они ограничивают скорость нарастания пускового тока и его предельное значение, как одни из факторов, из-за которых падает КПД
Итак, асинхронный двигатель имеет довольно широкую область использования и применяется во многих хозяйственных и производственных сферах деятельности.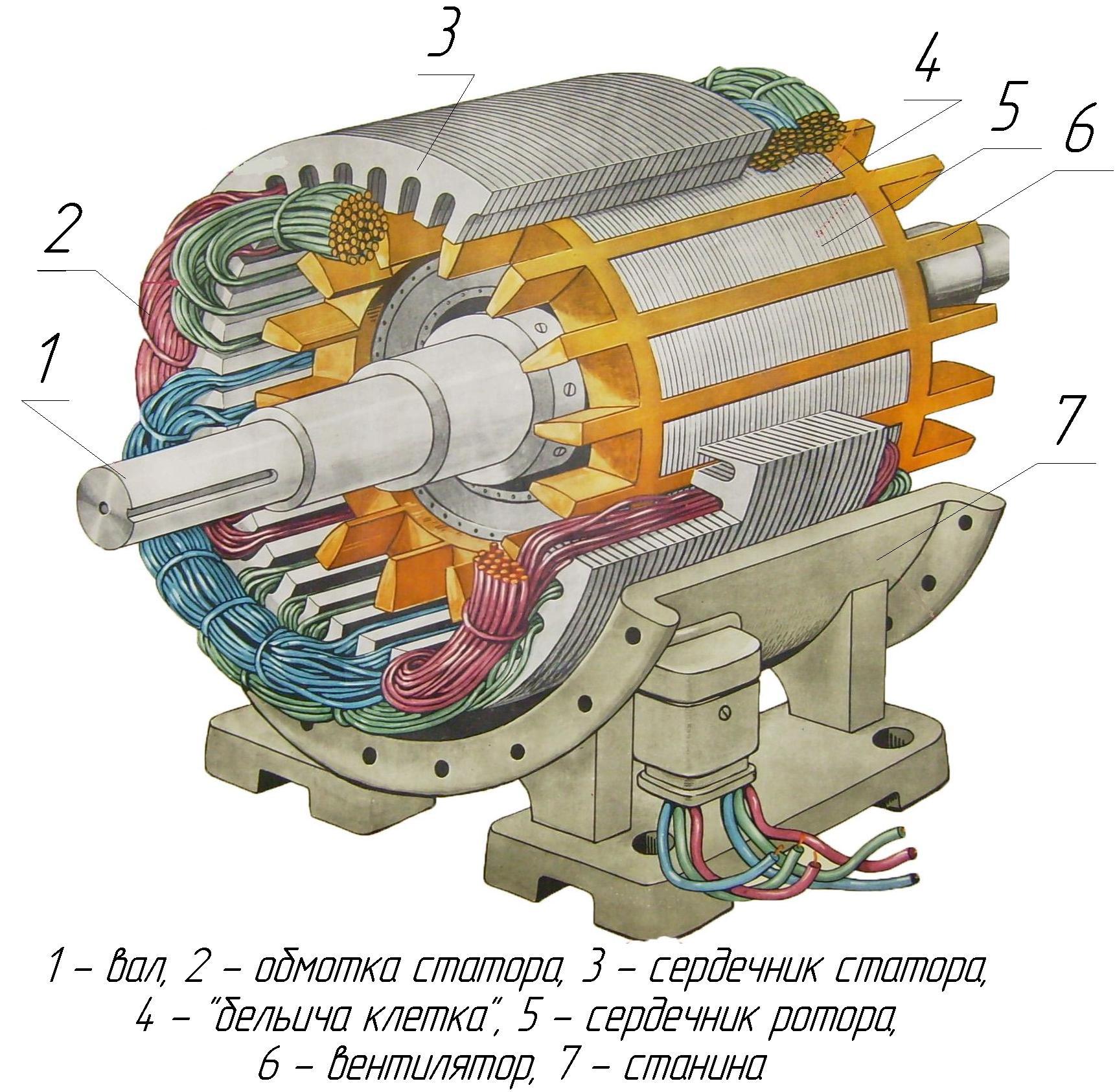 У нас, в компании РУСЭЛТ, представлен широкий выбор электродвигателей данного типа, приобрести который вы можете по ценам, которые ощутимо выгоднее, чем у конкурентов.
У нас, в компании РУСЭЛТ, представлен широкий выбор электродвигателей данного типа, приобрести который вы можете по ценам, которые ощутимо выгоднее, чем у конкурентов.
Виды электродвигателей и их модификации
Модификации электродвигателей
Асинхронные электродвигатели АИР благодаря несложной конструкции, неимения нестационарных контактов и невысокой цене, при высокой ремонтопригодности, востребованы во всех без исключения отраслях промышленности. Поскольку данный тип моторов очень распространен, он имеет достаточно широкий ряд модификаций. Из-за этого часто встает вопрос, какие электродвигатели выбрать под те или иные задачи. Давайте разберемся, какие бывают электродвигатели и какую маркировку они имеют.
Какие бывают электродвигатели
Электродвигатель с повышенным скольжением (С).
Моторы с повышенным скольжением (АИРС) устанавливают на механизмы, которые работают с большими нагрузками, нежели могут выдержать обычные асинхронные эл двигатели. Также их ставят на агрегаты, которые работают в повторно-кратковременном режиме. Для того чтобы обеспечить данные режимы работы в обмотке ротора используют катанку из стали с более высокой сопротивляемостью к деформациям. По сути, они отличаются от стандартных моторов только лишь внутренним строением. Такие двигатели часто применяют на судовом оборудовании.
Также их ставят на агрегаты, которые работают в повторно-кратковременном режиме. Для того чтобы обеспечить данные режимы работы в обмотке ротора используют катанку из стали с более высокой сопротивляемостью к деформациям. По сути, они отличаются от стандартных моторов только лишь внутренним строением. Такие двигатели часто применяют на судовом оборудовании.
Двигатель с самовентиляцией и защищенного исполнения (Н).
Это машины, у которых вентилятор закреплен на собственном валу и при вращении он создает аэродинамическое давление. В данном случае мотор имеет закрытое исполнение с рубчатой поверхностью. Служит это для повышения плоскости охлаждения. Применяются, например, в силовых насосах, используемых при добыче нефти или газа.
Эл двигатель с фазным ротором (К).
Данный мотор можно регулировать с помощью добавления в цепь ротора дополнительных резисторов. Данное исполнение позволяет повысить пусковой момент и пусковые токи. Сопротивление, в большинстве случаев, дополняется с помощью реостатов.
Сопротивление, в большинстве случаев, дополняется с помощью реостатов.
Встраиваемый электродвигатель (В).
Как ясно из названия, они предназначены для встраивания в какой-либо механизм. По своим характеристикам не отличаются от двигателей основного исполнения. Применяются в токарных станках, например.
С электромагнитным тормозом (Е).
Как правило, такие двигатели устанавливаются на оборудование, в котором необходима возможность практически мгновенной остановки (станочно-конвейерное оборудование). На самом деле это обычный асинхронный двигатель, в котором предусмотрен электронный тормоз. Возможно исполнение с ручкой растормаживания (модификация Е2).
Двигатели для привода центробежных моноблочных насосов (Ж).
Отличаются от обычных электродвигателей наличием продленного вала. Делается это для постановки рабочих колес насосов.
Для мотор-редукторов (РЗ).
Конструктивно ничем не отличаются от остальных электродвигателей АИР, за исключением особой формы фланцевого подшипникового щита, которая обеспечивает установку усиленного подшипника и специального рабочего конца вала.
Эл двигатели АИР для станков-качалок (С).
Находят применение на нефтепромысле. Идентичны моторам, на базе которых созданы. Подразумевается их размещение на открытом воздухе.
Для приводов лифтов (Л).
Предназначены для привода лебедок лифтов. Данная модификация двигателей позволяет получить плавность хода всего механизма за счет постоянного момента на валу ротора.
Со встроенными датчиками (Б).
Как ясно из названия – установленные различные датчики для защиты электродвигателя. Например, температурный датчик: при нагреве двигателя устройства защиты воздействуют на цепь контактора или пускателя и отключают машину. Используются на атомных станциях или других предприятиях, где чрезвычайно важна безаварийность.
Двигатели с повышенной точностью по установочным размерам (П).
Имеют повышенную точность таких параметров как биение рабочего конца вала и так далее.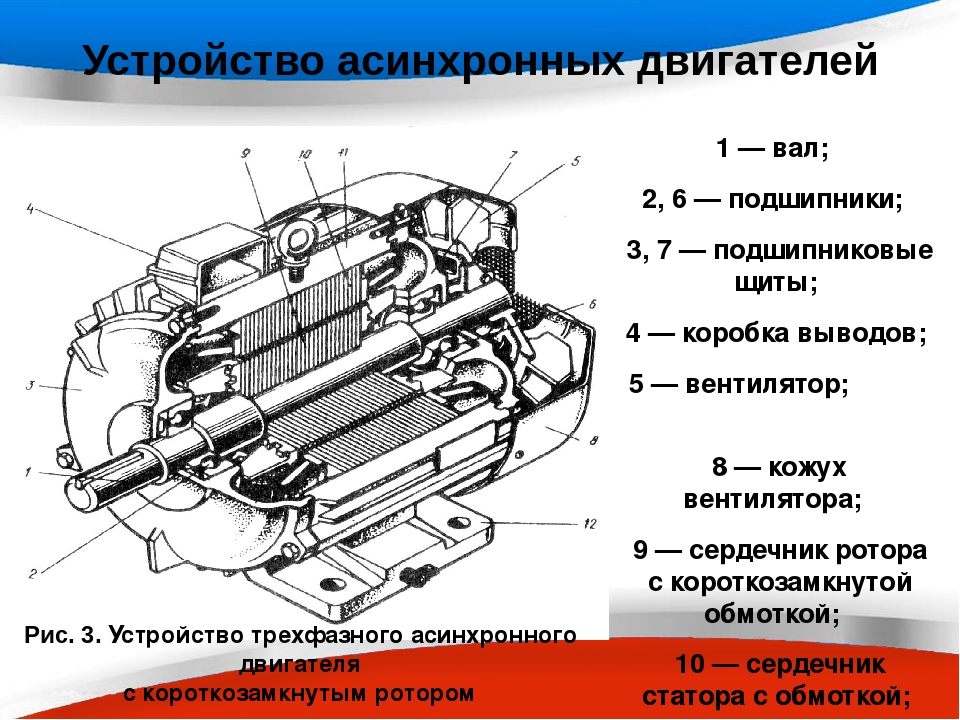 Уменьшен сохранившийся дисбаланс роторов двигателей.
Уменьшен сохранившийся дисбаланс роторов двигателей.
Специалисты компании УЭСК помогут сделать правильный выбор
Электродвигатель АИР характеристики
| Тип двигателя | Р, кВт | Номинальная частота вращения, об/мин | кпд,* | COS ф | 1п/1н | Мп/Мн | Мmах/Мн | 1н, А | Масса, кг |
| АИР56А2 | 0,18 | 2840 | 68,0 | 0,78 | 5,0 | 2,2 | 2,2 | 0,52 | 3,4 |
| АИР56В2 | 0,25 | 2840 | 68,0 | 0,698 | 5,0 | 2,2 | 2,2 | 0,52 | 3,9 |
| АИР56А4 | 0,12 | 1390 | 63,0 | 0,66 | 5,0 | 2,1 | 2,2 | 0,44 | 3,4 |
| АИР56В4 | 0,18 | 1390 | 64,0 | 0,68 | 5,0 | 2,1 | 2,2 | 0,65 | 3,9 |
| АИР63А2 | 0,37 | 2840 | 72,0 | 0,86 | 5,0 | 2,2 | 2,2 | 0,91 | 4,7 |
| АИР63В2 | 0,55 | 2840 | 75,0 | 0,85 | 5,0 | 2,2 | 2,3 | 1,31 | 5,5 |
| АИР63А4 | 0,25 | 1390 | 68,0 | 0,67 | 5,0 | 2,1 | 2,2 | 0,83 | 4,7 |
| АИР63В4 | 0,37 | 1390 | 68,0 | 0,7 | 5,0 | 2,1 | 2,2 | 1,18 | 5,6 |
| АИР63А6 | 0,18 | 880 | 56,0 | 0,62 | 4,0 | 1,9 | 2 | 0,79 | 4,6 |
| АИР63В6 | 0,25 | 880 | 59,0 | 0,62 | 4,0 | 1,9 | 2 | 1,04 | 5,4 |
| АИР71А2 | 0,75 | 2840 | 75,0 | 0,83 | 6,1 | 2,2 | 2,3 | 1,77 | 8,7 |
| АИР71В2 | 1,1 | 2840 | 76,2 | 0,84 | 6,9 | 2,2 | 2,3 | 2,6 | 10,5 |
| АИР71А4 | 0,55 | 1390 | 71,0 | 0,75 | 5,2 | 2,4 | 2,3 | 1,57 | 8,4 |
| АИР71В4 | 0,75 | 1390 | 73,0 | 0,76 | 6,0 | 2,3 | 2,3 | 2,05 | 10 |
| АИР71А6 | 0,37 | 880 | 62,0 | 0,70 | 4,7 | 1,9 | 2,0 | 1,3 | 8,4 |
| АИР71В6 | 0,55 | 880 | 65,0 | 0,72 | 4,7 | 1,9 | 2,1 | 1,8 | 10 |
| АИР71А8 | 0,25 | 645 | 54,0 | 0,61 | 4,7 | 1,8 | 1,9 | 1,1 | 9 |
| АИР71В8 | 0,25 | 645 | 54,0 | 0,61 | 4,7 | 1,8 | 1,9 | 1,1 | 9 |
| АИР80А2 | 1,5 | 2850 | 78,5 | 0,84 | 7,0 | 2,2 | 2,3 | 3,46 | 13 |
| АИР80А2ЖУ2 | 1,5 | 2850 | 78,5 | 0,84 | 7,0 | 2,2 | 2,3 | 3,46 | 13 |
| АИР80В2 | 2,2 | 2855 | 81,0 | 0,85 | 7,0 | 2,2 | 2,3 | 4,85 | 15 |
| АИР80В2ЖУ2 | 2,2 | 2855 | 81,0 | 0,85 | 7,0 | 2,2 | 2,3 | 4,85 | 15 |
| АИР80А4 | 1,1 | 1390 | 76,2 | 0,77 | 6,0 | 2,3 | 2,3 | 2,85 | 14 |
| АИР80В4 | 1,5 | 1400 | 78,5 | 0,78 | 6,0 | 2,3 | 2,3 | 3,72 | 16 |
| АИР80А6 | 0,75 | 905 | 69,0 | 0,72 | 5,3 | 2,0 | 2,1 | 2,3 | 14 |
| АИР80В6 | 1,1 | 905 | 72,0 | 0,73 | 5,5 | 2,0 | 2,1 | 3,2 | 16 |
| АИР80А8 | 0,37 | 675 | 62,0 | 0,61 | 4,0 | 1,8 | 1,9 | 1,49 | 15 |
| АИР80В8 | 0,55 | 680 | 63,0 | 0,61 | 4,0 | 1,8 | 2,0 | 2,17 | 18 |
| АИР90L2 | 3,0 | 2860 | 82,6 | 0,87 | 7,5 | 2,2 | 2,3 | 6,34 | 17 |
| АИР90L2ЖУ2 | 3,0 | 2860 | 82,6 | 0,87 | 7,5 | 2,2 | 2,3 | 6,34 | 17 |
| АИР90L4 | 2,2 | 1410 | 80,0 | 0,81 | 7,0 | 2,3 | 2,3 | 5,1 | 17 |
| АИР90L6 | 1,5 | 920 | 76,0 | 0,75 | 5,5 | 2,0 | 2,1 | 4,0 | 18 |
| АИР90LA8 | 0,75 | 680 | 70,0 | 0,67 | 4,0 | 1,8 | 2,0 | 2,43 | 23 |
| АИР90LB8 | 1,1 | 680 | 72,0 | 0,69 | 5,0 | 1,8 | 2,0 | 3,36 | 28 |
| АИР100S2 | 4,0 | 2880 | 84,2 | 0,88 | 7,5 | 2,2 | 2,3 | 8,2 | 20,5 |
| АИР100S2ЖУ2 | 4,0 | 2880 | 84,2 | 0,88 | 7,5 | 2,2 | 2,3 | 8,2 | 20,5 |
| АИР100L2 | 5,5 | 2900 | 85,7 | 0,88 | 7,5 | 2,2 | 2,3 | 11,1 | 28 |
| АИР100L2ЖУ2 | 5,5 | 2900 | 85,7 | 0,88 | 7,5 | 2,2 | 2,3 | 11,1 | 28 |
| АИР100S4 | 3,0 | 1410 | 82,6 | 0,82 | 7,0 | 2,3 | 2,3 | 6,8 | 21 |
| АИР100L4 | 4,0 | 1435 | 84,2 | 0,82 | 7,0 | 2,3 | 2,3 | 8,8 | 37 |
| АИР100L6 | 2,2 | 935 | 79,0 | 0,76 | 6,5 | 2,0 | 2,1 | 5,6 | 33,5 |
| АИР100L8 | 1,5 | 690 | 74,0 | 0,70 | 5,0 | 1,8 | 2,0 | 4,4 | 33,5 |
| АИР112M2 | 7,5 | 2895 | 87,0 | 0,88 | 7,5 | 2,2 | 2,3 | 14,9 | 49 |
| АИР112М2ЖУ2 | 7,5 | 2895 | 87,0 | 0,88 | 7,5 | 2,2 | 2,3 | 14,9 | 49 |
| АИР112М4 | 5,5 | 1440 | 85,7 | 0,83 | 7,0 | 2,3 | 2,3 | 11,7 | 45 |
| АИР112MA6 | 3,0 | 960 | 81,0 | 0,73 | 6,5 | 2,1 | 2,1 | 7,4 | 41 |
| АИР112MB6 | 4,0 | 860 | 82,0 | 0,76 | 6,5 | 2,1 | 2,1 | 9,75 | 50 |
| АИР112MA8 | 2,2 | 710 | 79,0 | 0,71 | 6,0 | 1,8 | 2,0 | 6,0 | 46 |
| АИР112MB8 | 3,0 | 710 | 80,0 | 0,73 | 6,0 | 1,8 | 2,0 | 7,8 | 53 |
| АИР132M2 | 11 | 2900 | 88,4 | 0,89 | 7,5 | 2,2 | 2,3 | 21,2 | 54 |
| АИР132М2ЖУ2 | 11 | 2900 | 88,4 | 0,89 | 7,5 | 2,2 | 2,3 | 21,2 | 54 |
| АИР132S4 | 7,5 | 1460 | 87,0 | 0,84 | 7,0 | 2,3 | 2,3 | 15,6 | 52 |
| АИР132M4 | 11 | 1450 | 88,4 | 0,84 | 7,0 | 2,2 | 2,3 | 22,5 | 60 |
| АИР132S6 | 5,5 | 960 | 84,0 | 0,77 | 6,5 | 2,1 | 2,1 | 12,9 | 56 |
| АИР132M6 | 7,5 | 970 | 86,0 | 0,77 | 6,5 | 2,0 | 2,1 | 17,2 | 61 |
| АИР132S8 | 4,0 | 720 | 81,0 | 0,73 | 6,0 | 1,9 | 2,0 | 10,3 | 70 |
| АИР132M8 | 5,5 | 720 | 83,0 | 0,74 | 6,0 | 1,9 | 2,0 | 13,6 | 86 |
| АИР160S2 | 15 | 2930 | 89,4 | 0,89 | 7,5 | 2,2 | 2,3 | 28,6 | 116 |
| АИР160S2ЖУ2 | 15 | 2930 | 89,4 | 0,89 | 7,5 | 2,2 | 2,3 | 28,6 | 116 |
| АИР160M2 | 18,5 | 2930 | 90,0 | 0,90 | 7,5 | 2,0 | 2,3 | 34,7 | 130 |
| АИР160М2ЖУ2 | 18,5 | 2930 | 90,0 | 0,90 | 7,5 | 2,0 | 2,3 | 34,7 | 130 |
| АИР160S4 | 15 | 1460 | 89,4 | 0,85 | 7,5 | 2,2 | 2,3 | 30,0 | 125 |
| АИР160S4ЖУ2 | 15 | 1460 | 89,4 | 0,85 | 7,5 | 2,2 | 2,3 | 30,0 | 125 |
| АИР160M4 | 18,5 | 1470 | 90,0 | 0,86 | 7,5 | 2,2 | 2,3 | 36,3 | 142 |
| АИР160S6 | 11 | 970 | 87,5 | 0,78 | 6,5 | 2,0 | 2,1 | 24,5 | 125 |
| АИР160M6 | 15 | 970 | 89,0 | 0,81 | 7,0 | 2,0 | 2,1 | 31,6 | 155 |
| АИР160S8 | 7,5 | 720 | 85,5 | 0,75 | 6,0 | 1,9 | 2,0 | 17,8 | 125 |
| АИР160M8 | 11 | 730 | 87,5 | 0,75 | 6,5 | 2,0 | 2,0 | 25,5 | 150 |
| АИР180S2 | 22 | 2940 | 90,5 | 0,90 | 7,5 | 2,0 | 2,3 | 41,0 | 150 |
| АИР180S2ЖУ2 | 22 | 2940 | 90,5 | 0,90 | 7,5 | 2,0 | 2,3 | 41,0 | 150 |
| АИР180M2 | 30 | 2950 | 91,4 | 0,90 | 7,5 | 2,0 | 2,3 | 55,4 | 170 |
| АИР180М2ЖУ2 | 30 | 2950 | 91,4 | 0,90 | 7,5 | 2,0 | 2,3 | 55,4 | 170 |
| АИР180S4 | 22 | 1470 | 90,5 | 0,86 | 7,5 | 2,2 | 2,3 | 43,2 | 160 |
| АИР180S4ЖУ2 | 22 | 1470 | 90,5 | 0,86 | 7,5 | 2,2 | 2,3 | 43,2 | 160 |
| АИР180M4 | 30 | 1470 | 91,4 | 0,86 | 7,2 | 2,2 | 2,3 | 57,6 | 190 |
| АИР180М4ЖУ2 | 30 | 1470 | 91,4 | 0,86 | 7,2 | 2,2 | 2,3 | 57,6 | 190 |
| АИР180M6 | 18,5 | 980 | 90,0 | 0,81 | 7,0 | 2,1 | 2,1 | 38,6 | 160 |
| АИР180M8 | 15 | 730 | 88,0 | 0,76 | 6,6 | 2,0 | 2,0 | 34,1 | 172 |
| АИР200M2 | 37 | 2950 | 92,0 | 0,88 | 7,5 | 2,0 | 2,3 | 67,9 | 230 |
| АИР200М2ЖУ2 | 37 | 2950 | 92,0 | 0,88 | 7,5 | 2,0 | 2,3 | 67,9 | 230 |
| АИР200L2 | 45 | 2960 | 92,5 | 0,90 | 7,5 | 2,0 | 2,3 | 82,1 | 255 |
| АИР200L2ЖУ2 | 45 | 2960 | 92,5 | 0,90 | 7,5 | 2,0 | 2,3 | 82,1 | 255 |
| АИР200M4 | 37 | 1475 | 92,0 | 0,87 | 7,2 | 2,2 | 2,3 | 70,2 | 230 |
| АИР200L4 | 45 | 1475 | 92,5 | 0,87 | 7,2 | 2,2 | 2,3 | 84,9 | 260 |
| АИР200M6 | 22 | 980 | 90,0 | 0,83 | 7,0 | 2,0 | 2,1 | 44,7 | 195 |
| АИР200L6 | 30 | 980 | 91,5 | 0,84 | 7,0 | 2,0 | 2,1 | 59,3 | 225 |
| АИР200M8 | 18,5 | 730 | 90,0 | 0,76 | 6,6 | 1,9 | 2,0 | 41,1 | 210 |
| АИР200L8 | 22 | 730 | 90,5 | 0,78 | 6,6 | 1,9 | 2,0 | 48,9 | 225 |
| АИР225M2 | 55 | 2970 | 93,0 | 0,90 | 7,5 | 2,0 | 2,3 | 100 | 320 |
| АИР225M4 | 55 | 1480 | 93,0 | 0,87 | 7,2 | 2,2 | 2,3 | 103 | 325 |
| АИР225M6 | 37 | 980 | 92,0 | 0,86 | 7,0 | 2,1 | 2,1 | 71,0 | 360 |
| АИР225M8 | 30 | 735 | 91,0 | 0,79 | 6,5 | 1,9 | 2,0 | 63 | 360 |
| АИР250S2 | 75 | 2975 | 93,6 | 0,90 | 7,0 | 2,0 | 2,3 | 135 | 450 |
| АИР250M2 | 90 | 2975 | 93,9 | 0,91 | 7,1 | 2,0 | 2,3 | 160 | 530 |
| АИР250S4 | 75 | 1480 | 93,6 | 0,88 | 6,8 | 2,2 | 2,3 | 138,3 | 450 |
| АИР250M4 | 90 | 1480 | 93,9 | 0,88 | 6,8 | 2,2 | 2,3 | 165,5 | 495 |
| АИР250S6 | 45 | 980 | 92,5 | 0,86 | 7,0 | 2,1 | 2,0 | 86,0 | 465 |
| АИР250M6 | 55 | 980 | 92,8 | 0,86 | 7,0 | 2,1 | 2,0 | 104 | 520 |
| АИР250S8 | 37 | 740 | 91,5 | 0,79 | 6,6 | 1,9 | 2,0 | 78 | 465 |
| АИР250M8 | 45 | 740 | 92,0 | 0,79 | 6,6 | 1,9 | 2,0 | 94 | 520 |
| АИР280S2 | 110 | 2975 | 94,0 | 0,91 | 7,1 | 1,8 | 2,2 | 195 | 650 |
| АИР280M2 | 132 | 2975 | 94,5 | 0,91 | 7,1 | 1,8 | 2,2 | 233 | 700 |
| АИР280S4 | 110 | 1480 | 94,5 | 0,88 | 6,9 | 2,1 | 2,2 | 201 | 650 |
| АИР280M4 | 132 | 1480 | 94,8 | 0,88 | 6,9 | 2,1 | 2,2 | 240 | 700 |
| АИР280S6 | 75 | 985 | 93,5 | 0,86 | 6,7 | 2,0 | 2,0 | 142 | 690 |
| АИР280M6 | 90 | 985 | 93,8 | 0,86 | 6,7 | 2,0 | 2,0 | 169 | 800 |
| АИР280S8 | 55 | 740 | 92,8 | 0,81 | 6,6 | 1,8 | 2,0 | 111 | 690 |
| АИР280M8 | 75 | 740 | 93,5 | 0,81 | 6,2 | 1,8 | 2,0 | 150 | 800 |
| АИР315S2 | 160 | 2975 | 94,6 | 0,92 | 7,1 | 1,8 | 2,2 | 279 | 1170 |
| АИР315M2 | 200 | 2975 | 94,8 | 0,92 | 7,1 | 1,8 | 2,2 | 248 | 1460 |
| АИР315МВ2 | 250 | 2975 | 94,8 | 0,92 | 7,1 | 1,8 | 2,2 | 248 | 1460 |
| АИР315S4 | 160 | 1480 | 94,9 | 0,89 | 6,9 | 2,1 | 2,2 | 288 | 1000 |
| АИР315M4 | 200 | 1480 | 94,9 | 0,89 | 6,9 | 2,1 | 2,2 | 360 | 1200 |
| АИР315S6 | 110 | 985 | 94,0 | 0,86 | 6,7 | 2,0 | 2,0 | 207 | 880 |
| АИР315М(А)6 | 132 | 985 | 94,2 | 0,87 | 6,7 | 2,0 | 2,0 | 245 | 1050 |
| АИР315MВ6 | 160 | 985 | 94,2 | 0,87 | 6,7 | 2,0 | 2,0 | 300 | 1200 |
| АИР315S8 | 90 | 740 | 93,8 | 0,82 | 6,4 | 1,8 | 2,0 | 178 | 880 |
| АИР315М(А)8 | 110 | 740 | 94,0 | 0,82 | 6,4 | 1,8 | 2,0 | 217 | 1050 |
| АИР315MВ8 | 132 | 740 | 94,0 | 0,82 | 6,4 | 1,8 | 2,0 | 260 | 1200 |
| АИР355S2 | 250 | 2980 | 95,5 | 0,92 | 6,5 | 1. 6 6 |
2,3 | 432,3 | 1700 |
| АИР355M2 | 315 | 2980 | 95,6 | 0,92 | 7,1 | 1,6 | 2,2 | 544 | 1790 |
| АИР355S4 | 250 | 1490 | 95,6 | 0,90 | 6,2 | 1,9 | 2,9 | 441 | 1700 |
| АИР355M4 | 315 | 1480 | 95,6 | 0,90 | 6,9 | 2,1 | 2,2 | 556 | 1860 |
| АИР355MА6 | 200 | 990 | 94,5 | 0,88 | 6,7 | 1,9 | 2,0 | 292 | 1550 |
| АИР355S6 | 160 | 990 | 95,1 | 0,88 | 6,3 | 1,6 | 2,8 | 291 | 1550 |
| АИР355МВ6 | 250 | 990 | 94,9 | 0,88 | 6,7 | 1,9 | 2,0 | 454,8 | 1934 |
| АИР355L6 | 315 | 990 | 94,5 | 0,88 | 6,7 | 1,9 | 2,0 | 457 | 1700 |
| АИР355S8 | 132 | 740 | 94,3 | 0,82 | 6,4 | 1,9 | 2,7 | 259,4 | 1800 |
| АИР355MА8 | 160 | 740 | 93,7 | 0,82 | 6,4 | 1,8 | 2,0 | 261 | 2000 |
| АИР355MВ8 | 200 | 740 | 94,2 | 0,82 | 6,4 | 1,8 | 2,0 | 315 | 2150 |
| АИР355L8 | 132 | 740 | 94,5 | 0,82 | 6,4 | 1,8 | 2,0 | 387 | 2250 |
Асинхронный электродвигатель: виды и принцип работы
В наши дни электрооборудование выглядит совсем иначе, чем изобретение российского электротехника, но по-прежнему используются для превращения электрической энергии в механическую. Надежность в работе, простая конструкция и невысокая себестоимость были по достоинству оценены покупателями. Сегодня асинхронные двигатели — наиболее распространенный во всем мире тип моторов. Их используют для комплектации промышленного оборудования, бытовой техники и электроинструментов в девяти случаев из десяти.
Надежность в работе, простая конструкция и невысокая себестоимость были по достоинству оценены покупателями. Сегодня асинхронные двигатели — наиболее распространенный во всем мире тип моторов. Их используют для комплектации промышленного оборудования, бытовой техники и электроинструментов в девяти случаев из десяти.
Какие бывают виды асинхронных механизмов
Асинхронный мотор имеет самую простую конструкцию. Классическое устройство электродвигателя состоит из статора, а также ротора.
Статор выполнен в форме классического цилиндра. Для изготовления статора производители используют тонкие стальные листы, обмотка в пазах сердечника сделана из специального провода. Оси обмоток расположены друг к другу под углом 120°. Их концы соединяются по-разному — все зависит от допустимой величины напряжения. В одних случаях соединение напоминаем звезду, в других – треугольник.
В отличие от статора, роторы бывают нескольких типов. Производители классифицируют выпущенные моторы именно по типу ротора — виды асинхронных двигателей: с короткозамкнутым и фазным ротором. Давайте рассмотрим каждый их подробнее.
Давайте рассмотрим каждый их подробнее.
- Фазный — это ротор с трехфазной обмоткой, которая напоминает обмотку статора. Ее концы соединяются в форме звезды, края крепятся к контактным кольцам. К этим же кольцам присоединяются добавочные резисторы, которые меняют активное сопротивление в цепи и уменьшают большие пусковые токи.
- Короткозамкнутый ротор — сердечник, изготовленный из стальных листов. Для серийного производства, как правило, используется расплавленный алюминий, который заливается и образовывает стержни между торцевых колец. Конструкция ротора получила в обиходе название «беличья клетка», так как внешне напоминает бочку для грызунов. Когда заходит речь об изготовлении мощных двигателей, производители используют не алюминий, а медь.
Асинхронный электродвигатель: принцип работы
Напряжение подается на обмотку статора. В этот момент возникает магнитный поток, величина которого меняется с изменением частоты напряжения. Потоки сдвинуты во времени и пространстве по отношению друг к другу на 120°. Вращающим оказывается результирующий магнитный поток, который движется, тем самым создавая в проводниках ротора ЭДС. Обмотка ротора исполняет роль замкнутой электрической цепи, в ней появляется ток, который, взаимодействуя с потоками статора, создает пусковой момент. Мотор стремится повернуть ротор в направлении движения магнитного поля статора. В тот момент, когда он достигает значения тормозного момента ротора и превышает его, ротор начинает вращаться, вызывая скольжение.
Вращающим оказывается результирующий магнитный поток, который движется, тем самым создавая в проводниках ротора ЭДС. Обмотка ротора исполняет роль замкнутой электрической цепи, в ней появляется ток, который, взаимодействуя с потоками статора, создает пусковой момент. Мотор стремится повернуть ротор в направлении движения магнитного поля статора. В тот момент, когда он достигает значения тормозного момента ротора и превышает его, ротор начинает вращаться, вызывая скольжение.
Что такое скольжение? Это величина, которая показывает нам, насколько синхронная частота магнитного поля статора больше, чем частота вращения ротора.
S = ((n1 – n2)/n1) х 100 %, где:
S – скольжение;
n1 – синхронная частота магнитного поля статора, n2 – ротора.
Почему так важно скольжение? Его используют для характеристики асинхронных электродвигателей, ведь изначально скольжение равно единице, но по мере роста n1 относительная разность частот n1-n2 становится меньше. В результате этого, падает ЭДС и ток в проводниках ротора, что в свою очередь приводит к уменьшению вращающего момента. Если провести анализ, в состоянии холостого хода, в тот момент, когда мотор работает без нагрузки на валу, показатель скольжения минимален. Как только возрастает статический момент, скольжение растет до величины Skp — критического скольжения. Этот показатель очень важен, ведь как только будет превышена точка критического скольжения, асинхронные двигатели перестают стабильно работать. Значение скольжения колеблется в пределах от нуля до единицы, асинхронных моторов универсального назначения в номинальном режиме до 8 %. Как только наступает равновесие между электромагнитным и тормозным моментом изменение величин прекратится.
В результате этого, падает ЭДС и ток в проводниках ротора, что в свою очередь приводит к уменьшению вращающего момента. Если провести анализ, в состоянии холостого хода, в тот момент, когда мотор работает без нагрузки на валу, показатель скольжения минимален. Как только возрастает статический момент, скольжение растет до величины Skp — критического скольжения. Этот показатель очень важен, ведь как только будет превышена точка критического скольжения, асинхронные двигатели перестают стабильно работать. Значение скольжения колеблется в пределах от нуля до единицы, асинхронных моторов универсального назначения в номинальном режиме до 8 %. Как только наступает равновесие между электромагнитным и тормозным моментом изменение величин прекратится.
Если говорить простыми словами, принцип работы мотора состоит во взаимодействии вращающегося магнитного поля статора и токов, которые наводятся этим магнитным полем в роторе. Вращающий момент возникает только тогда, когда появляется разность частот вращения магнитных полей.
| Асинхронный двигатель
Наиболее часто используемый двигатель в мире – это асинхронный двигатель или асинхронный двигатель. Это двигатель, который может работать без электрического подключения к ротору. В этом посте будет обсуждаться асинхронный двигатель (асинхронные двигатели), его типы, то есть однофазный, трехфазный, короткозамкнутый корпус, контактное кольцо и т. Д., Особенности, принцип работы, применение, преимущества и недостатки.
Что такое асинхронный двигатель (асинхронный двигатель) Асинхронный двигатель или асинхронный двигатель – это самый простой и распространенный тип электродвигателя, который имеет только обмотки Armortisseur , что означает вспомогательную обмотку только на якоре.В асинхронном двигателе (или асинхронном двигателе) статорная часть двигателя передает электромагнитное поле своей обмоткой на роторную часть двигателя. Это генерирует электрический ток в роторе. Электрический ток создает крутящий момент, который приводит в движение.
Рис. 1 – Введение в асинхронный двигатель (асинхронный двигатель)
Он упоминается как «Асинхронный двигатель », поскольку он всегда будет работать со скоростью, меньшей, чем его синхронная скорость.Синхронная скорость определяется как скорость магнитного поля вращающейся машины, которая снова определяется количеством полюсов и частотой в машине.
Поскольку в этом типе двигателя ротор получает поток и вращение за счет магнитного поля в статоре, существует задержка между токами в статоре и роторе. Из-за этого ротор никогда не достигает своей синхронной скорости. Отсюда термин «асинхронный двигатель». На рис. 2 показаны части асинхронного двигателя.
Рис.2 – Детали асинхронного двигателя (асинхронный двигатель)
Конструкция асинхронного двигателя (асинхронный двигатель)
Он состоит в основном из двух частей, а именно:
Статор
Это неподвижная часть электродвигателя. Эта часть обеспечивает электромагнитное поле, необходимое для вращения вращающейся части двигателя. Он состоит из ряда штамповок с прорезями для трехфазной обмотки. Каждая обмотка отделена от другой обмотки на 120 градусов.
Эта часть обеспечивает электромагнитное поле, необходимое для вращения вращающейся части двигателя. Он состоит из ряда штамповок с прорезями для трехфазной обмотки. Каждая обмотка отделена от другой обмотки на 120 градусов.
Ротор
Это вращающаяся часть двигателя.Более распространенный тип ротора в асинхронных двигателях (или асинхронных двигателях) – это ротор с короткозамкнутым ротором. Ротор имеет форму якоря с сердечником цилиндрической формы. Вокруг сердечника есть параллельные прорези, через которые проходит ток. Сердечник имеет стержень из алюминия, меди или сплава.
Рис.3 – Базовый ротор и статор
Типы асинхронного двигателя (асинхронный двигатель)Он подразделяется на два типа:
- Однофазный асинхронный двигатель
- Трехфазный асинхронный двигатель
не является самозапускающимся двигателем. Здесь двигатель подключен к однофазному источнику питания, который передает переменный ток к основной обмотке. Поскольку источник переменного тока представляет собой синусоидальную волну, он создает пульсирующее магнитное поле в обмотке статора.
Здесь двигатель подключен к однофазному источнику питания, который передает переменный ток к основной обмотке. Поскольку источник переменного тока представляет собой синусоидальную волну, он создает пульсирующее магнитное поле в обмотке статора.
Пульсирующие магнитные поля – это два магнитных поля, вращающихся в противоположных направлениях; следовательно, крутящий момент не создается. Таким образом, после подачи тока ротор должен быть перемещен в любом направлении извне, чтобы двигатель заработал. Однофазный индуктор отсюда; Могут иметь разные варианты в зависимости от устройства, которое используется для запуска двигателя, а именно:
- Двигатель с расщепленной фазой
- Двигатель с экранированными полюсами
- Конденсаторный пусковой двигатель
- Конденсаторный пусковой двигатель и конденсаторный двигатель
Фиг.4 – Принципиальная схема (a) Однофазного (b) Трехфазного асинхронного двигателя
Трехфазного асинхронного двигателя (асинхронного двигателя)
Эти двигатели не требуют каких-либо внешних устройств, таких как конденсатор, центробежный переключатель или пусковая обмотка для запуск. Принцип работы этого двигателя основан на использовании трех однофазных фаз, разность фаз между которыми составляет 120 градусов. Таким образом, магнитное поле, вызывающее вращение, будет иметь одинаковую разность фаз между ними, это заставит ротор двигаться без какого-либо внешнего крутящего момента.
Принцип работы этого двигателя основан на использовании трех однофазных фаз, разность фаз между которыми составляет 120 градусов. Таким образом, магнитное поле, вызывающее вращение, будет иметь одинаковую разность фаз между ними, это заставит ротор двигаться без какого-либо внешнего крутящего момента.
Для дальнейшего упрощения предположим, что это три фазы: phase1, phase2 и phase3. Итак, первая фаза 1 намагничивается, и ротор начинает двигаться в этом направлении, вскоре после этого будет возбуждена фаза 2, и тогда ротор будет притягиваться к фазе 2, а затем, наконец, к фазе 3. Таким образом, ротор продолжит вращаться.
Далее они подразделяются на категории в зависимости от типа используемого ротора:
- Асинхронный двигатель с короткозамкнутым ротором
- Асинхронный двигатель с контактным кольцом или двигатель с фазным ротором
Асинхронный двигатель с короткозамкнутым ротором
В этом типе ротор имеет форму Беличья клетка, отсюда и название. Ротор изготовлен из стали с очень токопроводящими металлами, такими как алюминий и медь на поверхности. Скорость асинхронного двигателя этого типа очень легко изменить, просто изменив форму стержней в роторе.
Ротор изготовлен из стали с очень токопроводящими металлами, такими как алюминий и медь на поверхности. Скорость асинхронного двигателя этого типа очень легко изменить, просто изменив форму стержней в роторе.
Рис. 5 – Асинхронный двигатель с короткозамкнутым ротором
Асинхронный двигатель с контактным кольцом или двигатель с фазным ротором
Он также известен как асинхронный двигатель с фазовой обмоткой. Здесь ротор подключается к внешнему сопротивлению через контактные кольца.Скорость ротора регулируется путем регулировки внешнего сопротивления. Поскольку у этого двигателя больше обмоток, чем у асинхронного двигателя с короткозамкнутым ротором, его также называют асинхронным двигателем с фазным ротором.
Рис. 6 – Асинхронный двигатель с контактным кольцом
Характеристики асинхронного двигателя (асинхронного двигателя) Ниже приведены характеристики двух различных типов асинхронных двигателей.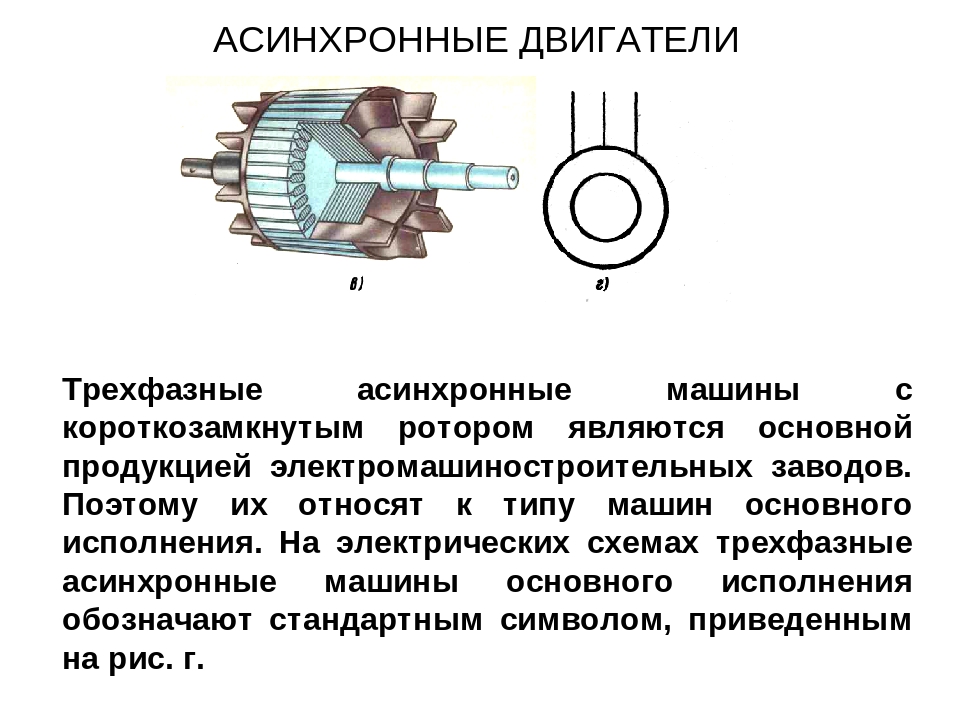
- Здесь мы выделим некоторые характеристики, которые применимы только к однофазным асинхронным двигателям:
- Однофазные асинхронные двигатели не самозапускаются и используют однофазное питание. для вращения.
- Чтобы изменить направление вращения в однофазных двигателях, лучше всего остановить двигатель и изменить его, иначе существует вероятность повреждения двигателя из-за момента инерции, который действует против направления, в котором вам нужно изменить вращение.
- Для запуска двигателя вам потребуется конденсатор и / или центробежный переключатель.
- Пусковой крутящий момент у этих двигателей низкий.
- Они в основном используются дома или в бытовой технике из-за низкого коэффициента мощности и эффективности.
Ниже перечислены некоторые особенности трехфазного асинхронного двигателя, которые отличает его от однофазного двигателя: специальные закуски.
Явление, которое заставляет асинхронные двигатели работать, весьма интересно. Двигатели постоянного тока нуждаются в двойном возбуждении для вращения, одно для статора, а другое для ротора.Но в этих двигателях мы должны отдавать это только статору, что делает это уникальным. Как следует из названия, принцип работы этого двигателя основан на индукции. Давайте предпримем ряд шагов, которые происходят при вращении этого двигателя:
- Питание подается на обмотки статора, возникает ток и создается магнитный поток.
- Обмотка в роторе устроена таким образом, что каждая катушка закорачивается.
- Короткозамкнутая обмотка ротора обрезается магнитным потоком статора.
Рис. 7 – Работа асинхронного двигателя
Согласно законам электромагнитной индукции Фарадея, магнитное поле взаимодействует с электрической цепью, создавая ЭДС (электродвижущая сила). Итак, согласно этому закону, в катушках ротора начинает течь ток.
- Ток в роторе генерирует другой поток.
- Теперь есть два потока: один в статоре, а другой в роторе.
- Поток ротора отстает от магнитного потока статора, что создает крутящий момент в роторе в направлении магнитного поля.
Области применения включают:
- Они широко используются в смесителях, игрушках, вентиляторах и т. Д.
- Они также используются в насосах и компрессорах.

- Малые асинхронные двигатели используются в электробритвах.
- Они используются в сверлильных станках, лифтах, кранах и дробилках.
- Они подходят для приводов текстильных фабрик и маслоэкстракционных заводов.
Ниже приведены некоторые из преимуществ асинхронных двигателей:
- Высокоэффективный и простой в конструкции.
- Очень прочный и может работать в любых условиях.
- Низкие эксплуатационные расходы, поскольку в них не так много деталей, как коммутаторы или щетки.
- Они могут развивать очень высокую скорость, не беспокоясь о том, что они износятся, поскольку у них нет щеток.
- Они просты в эксплуатации, поскольку к ротору не подключены электрические разъемы.
- Поскольку они не имеют щеток, искры не боятся, поэтому их можно использовать в загрязненных или взрывоопасных средах.
- Скорость от малой нагрузки до номинальной меняется меньше.

Асинхронные двигатели имеют простую конструкцию, которая может иметь несколько недостатков, как указано ниже:
- Трудно контролировать скорость асинхронного двигателя, поэтому его нельзя использовать в местах, требующих точного контроль скорости.
- При малых нагрузках наблюдается падение КПД.
- Они имеют высокие входные импульсные токи, что дает низкое напряжение при пуске двигателя.
См. Также: Видео на Youtube по асинхронным двигателям
Также прочтите: Маховик как накопитель энергии, расчеты и требования к ротору Повышающий трансформатор - работа, конструкция, применение и преимущества Синхронный двигатель - конструкция, принцип, типы, характеристики Что такое клещевые клещи (клещевые щупы) - типы, принцип работы и порядок эксплуатации
Разница между синхронным и асинхронным двигателем (со сравнительной таблицей)
Разница между синхронным двигателем и асинхронным двигателем объясняется с учетом таких факторов, как его тип, скольжение, потребность в дополнительном источнике питания, требования к контактным кольцам и щеткам, их стоимость, эффективность, коэффициент мощности, источник тока, скорость, самозапуск , влияние на крутящий момент из-за изменения напряжения, их рабочей скорости и различных применений как синхронного, так и асинхронного двигателя.
Различия между синхронным и асинхронным двигателем объясняются ниже в табличной форме.
| BASIS | СИНХРОННЫЙ ДВИГАТЕЛЬ | АСИНХРОННЫЙ ДВИГАТЕЛЬ |
|---|---|---|
| Определение | Синхронный двигатель – это машина, скорость ротора которой равна скорости магнитного поля статора. N = NS = 120f / P | Асинхронный двигатель – это машина, ротор которой вращается со скоростью, меньшей, чем синхронная скорость. N |
| Тип | Бесщеточный двигатель, двигатель с переменным сопротивлением, двигатель с регулируемым сопротивлением и двигатель с гистерезисом являются синхронными двигателями. | Асинхронный двигательпеременного тока известен как асинхронный двигатель. |
| Скольжение | Без проскальзывания. Значение скольжения равно нулю. | Имеют пробуксовку, поэтому величина пробуксовки не равна нулю. |
| Дополнительный источник питания | Требуется дополнительный источник постоянного тока для первоначального вращения ротора, близкого к синхронной скорости. | Не требует дополнительных источников запуска. |
| Контактное кольцо и щетки | Требуются контактное кольцо и щетки | Контактное кольцо и щетки не требуются. |
| Стоимость | Синхронный двигатель дороже по сравнению с асинхронным двигателем | Дешевле |
| КПД | КПД выше, чем у асинхронного двигателя. | Менее эффективный |
| Коэффициент мощности | Изменяя возбуждение, коэффициент мощности может быть соответственно отрегулирован как отстающий, опережающий или единичный. | Асинхронный двигатель работает только с отстающим коэффициентом мощности. |
| Электропитание | Ток подается на ротор синхронного двигателя | Ротор асинхронного двигателя не требует тока. |
| Скорость | Скорость двигателя не зависит от изменения нагрузки. Это постоянно. | Скорость асинхронного двигателя уменьшается с увеличением нагрузки. |
| Самозапуск | Синхронный двигатель не самозапускается | Самозапуск |
| Влияние на крутящий момент | Изменение приложенного напряжения не влияет на крутящий момент синхронного двигателя | Изменение приложенного напряжения влияет на крутящий момент асинхронного двигателя |
| Рабочая скорость | Они работают плавно и относительно хорошо на низкой скорости, ниже 300 об / мин. | Скорость вращения двигателя выше 600 об / мин отличная. |
| Приложения | Синхронные двигатели используются на электростанциях, обрабатывающей промышленности и т. Д. Они также используются в качестве регулятора напряжения. | Используется в центробежных насосах и вентиляторах, воздуходувках, бумажных и текстильных фабриках, компрессорах и подъемниках. и т. д. и т. д. |
Синхронный двигатель – это двигатель, который работает с синхронной скоростью, то есть скорость ротора равна скорости статора двигателя.Отсюда следует соотношение N = N S = 120f / P, где N – скорость ротора, а Ns – синхронная скорость.
Асинхронный двигатель – это асинхронный двигатель переменного тока. Ротор асинхронного двигателя вращается со скоростью меньше синхронной, т.е. N
Разница между синхронным и асинхронным двигателем
- Синхронный двигатель – это машина, скорость ротора которой равна скорости магнитного поля статора. Асинхронный двигатель – это машина, ротор которой вращается со скоростью меньше синхронной.
- Бесщеточный двигатель, двигатель с регулируемым сопротивлением, двигатель с регулируемым сопротивлением и двигатель с гистерезисом являются синхронными двигателями. Асинхронный двигатель переменного тока известен как асинхронный двигатель.
- Синхронный двигатель не имеет скольжения.
 Значение скольжения равно нулю. Асинхронный двигатель имеет скольжение, поэтому значение скольжения не равно нулю.
Значение скольжения равно нулю. Асинхронный двигатель имеет скольжение, поэтому значение скольжения не равно нулю. - Синхронному двигателю требуется дополнительный источник постоянного тока для первоначального вращения ротора, близкого к синхронной скорости. Асинхронный двигатель не требует дополнительного источника пуска.
- Контактное кольцо и щетки необходимы в синхронном двигателе, тогда как асинхронный двигатель не требует контактного кольца и щеток. Только асинхронный двигатель с обмоткой требует и контактного кольца, и щеток.
- Синхронный двигатель дороже асинхронного двигателя.
- КПД синхронного двигателя больше, чем у асинхронного двигателя.
- Путем изменения возбуждения коэффициент мощности синхронного двигателя может быть соответственно отрегулирован как отстающий, опережающий или единичный, тогда как асинхронный двигатель работает только с отстающим коэффициентом мощности.
- На ротор синхронного двигателя подается ток.
 Ротор асинхронного двигателя не требует тока.
Ротор асинхронного двигателя не требует тока. - Скорость синхронного двигателя не зависит от изменения нагрузки. Это постоянно. Скорость асинхронного двигателя уменьшается с увеличением нагрузки.
- Синхронный двигатель не запускается автоматически, тогда как асинхронный двигатель запускается автоматически.
- Изменение приложенного напряжения не влияет на крутящий момент синхронного двигателя, но влияет на крутящий момент асинхронного двигателя.
- Синхронный двигатель работает плавно и относительно хорошо на низкой скорости, которая ниже 300 об / мин, тогда как скорость выше 600 об / мин работа асинхронного двигателя превосходна. Асинхронные двигатели используются в центробежных насосах и вентиляторах, воздуходувках, бумажных и текстильных фабриках, компрессорах и лифтах. и т. д.
- Синхронный двигатель используется в различных сферах применения на электростанциях, в обрабатывающей промышленности и т. Д. Он также используется в качестве регулятора напряжения.

Таким образом, синхронный двигатель отличается от асинхронного двигателя.
Основное различие между синхронным и асинхронным двигателем
В чем разница между синхронным и асинхронным двигателем (асинхронным двигателем)Электродвигатели – это машины, которые преобразуют электрическую энергию в механическую для выполнения механических операций. Эти двигатели могут быть предназначены для работы на переменном (AC) или постоянном (DC) токе. Двигатели переменного тока подразделяются на два типа; Синхронные двигатели и асинхронные двигатели.Оба они имеют некоторые общие черты, например, по конструкции, но совершенно разные по принципу действия и производительности.
Прежде чем перейти к списку различий между синхронным двигателем и асинхронным двигателем, мы собираемся обсудить их основы и то, как они работают. Для ясного объяснения вы можете знать разницу между однофазным и трехфазным источником питания, относящуюся к работе однофазных и трехфазных двигателей переменного тока.
Как мы знаем из нашей предыдущей статьи «Различия между двигателями переменного и постоянного тока», двигатели постоянного тока работают по принципу магнитного поля, действующего на проводник с током, который испытывает механическую силу.Где статор генерирует статическое магнитное поле, а ротор, состоящий из нескольких обмоток, несет входной постоянный ток.
В двигателях переменного тока используется идея вращательного магнитного поля RMF. Статор состоит из нескольких обмоток, которые создают переменное магнитное поле при подаче входного переменного тока. Это магнитное поле вращается вокруг ротора.
Ротор, состоящий из обмоток или проводников с замкнутым контуром, пропускает ток либо посредством индукции, либо через внешний источник тока, генерирующий собственное магнитное поле.Магнитное поле, создаваемое ротором, взаимодействует с вращающимся магнитным полем и начинает вращаться в его направлении.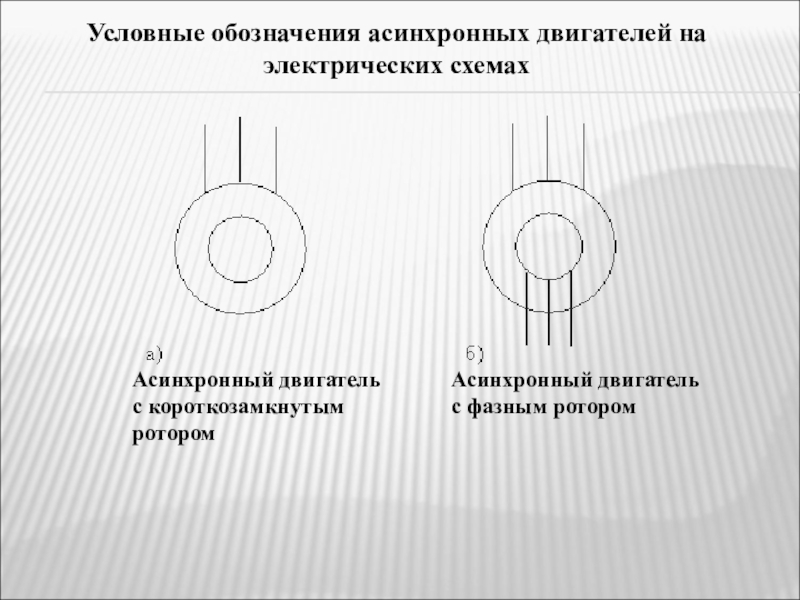
Относительная разница между полем вращения статора и скоростью ротора называется скольжением. если скольжение двигателя равно нулю или ротор имеет ту же скорость вращения, что и поле вращения статора, двигатель называется синхронным двигателем переменного тока. если двигатель переменного тока имеет скольжение или существует разница между скоростью возбуждения статора и ротором, двигатель называется асинхронным двигателем.Чтобы узнать больше о различных типах двигателей, обратитесь к предыдущим сообщениям о двигателях BLDC (бесщеточный постоянного тока), шаговых двигателях и серводвигателях.
Связанные сообщения:
Синхронный двигательКак следует из названия, синхронный двигатель имеет ротор, который предназначен для вращения с той же скоростью, что и вращающееся магнитное поле статора, называемой синхронной скоростью .
Статор создает вращающееся магнитное поле при подаче переменного тока.Ротор может быть спроектирован так, чтобы генерировать собственное магнитное поле с использованием внешнего источника постоянного тока через контактные кольца или постоянного магнита .
Ротор предназначен для создания магнитных полюсов, равных полюсам статора или целых кратных полюса. Когда статор и ротор находятся под напряжением, магнитное поле ротора блокируется с вращающимся магнитным полем статора, и он вращается с точной скоростью поля статора.
Из-за инерции синхронный двигатель не запускается сразу с синхронной скоростью (вращательное магнитное поле).Поэтому для обеспечения пускового момента используется дополнительная обмотка, называемая « демпферная обмотка ». Во время запуска он действует как асинхронный двигатель. Таким образом, предполагается, что синхронные двигатели – это не самозапускающиеся двигатели , им нужен дополнительный пусковой механизм.
Это может быть двигатель с раздельным возбуждением или без возбуждения, т.е. первый требует отдельного источника постоянного тока, возбуждает обмотки ротора и генерирует магнитное поле, а второй описывает синхронный двигатель, ротор которого предназначен для намагничивания вращающимся магнитным полем статора.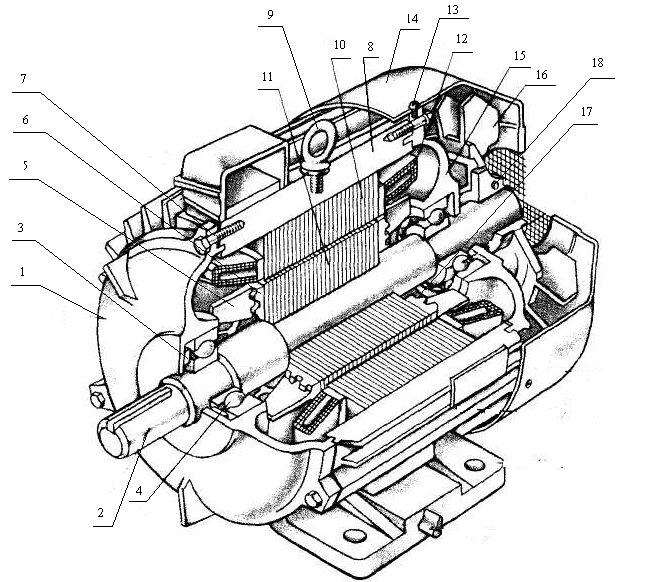 и вращается вместе с ним.
и вращается вместе с ним.
Ротор синхронного двигателя вращается с синхронной скоростью, которая зависит от частоты питания и полюсов обмоток статора. Следовательно, скорость двигателя не зависит от нагрузки. Чтобы изменять скорость синхронного двигателя, необходимо изменять частоту питания. Это достигается за счет использования частотно-регулируемого привода (VFD).
Связанные сообщения:
Асинхронный двигательНазвание асинхронного двигателя предполагает, что скорость ротора асинхронна со скоростью вращения магнитного поля статора.Точнее, ротор асинхронного двигателя вращается с относительно меньшей скоростью, чем статор RMF. Это связано с наличием проскальзывания между его скоростью статора и ротора.
Ротор асинхронного двигателя представляет собой короткозамкнутый ротор или ротор с обмоткой. Ротор с короткозамкнутым ротором построен с использованием тяжелых медных стержней, соединенных на конце с помощью токопроводящего кольца, которое электрически закорачивает их вместе. Ротор с обмоткой состоит из нескольких обмоток поверх многослойного стального сердечника.
Ротор с обмоткой состоит из нескольких обмоток поверх многослойного стального сердечника.
Вращающееся магнитное поле статора вызывает индуцированный ток в роторе. Этот индуцированный ток течет внутри ротора, создавая собственное магнитное поле. Согласно закону Ленца, это поле ротора противостоит причине, которая его порождает, и пытается устранить ее, догоняя скорость статора RMF (синхронную скорость). При этом ротор вращается в направлении статора RMF. Асинхронный двигатель также известен как асинхронный двигатель , поскольку он работает по принципу индукции.
Асинхронный двигатель никогда не может работать на синхронной скорости, вместо этого она всегда ниже, чем синхронная скорость, и это зависит от скольжения двигателя. Причина в том, что индуцированный ток в роторе генерируется из-за разницы между полем статора и ротора. если в случае, если он работает с синхронной скоростью, это означает, что ротор магнитно заблокирован и между полем статора и ротора нет разницы. Следовательно, не будет магнитного потока, индуцирующего ток в роторе.Магнитный поток необходим для асинхронного двигателя, поэтому он должен работать с меньшей скоростью, чем его синхронная скорость.
Следовательно, не будет магнитного потока, индуцирующего ток в роторе.Магнитный поток необходим для асинхронного двигателя, поэтому он должен работать с меньшей скоростью, чем его синхронная скорость.
Ротор с короткозамкнутым ротором имеет более простую конструкцию и позволяет наведенному току проходить через медные шины. В то время как заведенный ротор позволяет пользователю изменять ток ротора во время его запуска, как это используется в «Пускателе двигателя». Дело в том, чтобы безопасно запустить двигатель, уменьшив огромный пусковой ток, потребляемый асинхронным двигателем. Обычно это делается путем последовательного подключения переменного резистора к обмоткам ротора с помощью контактных колец.
Скорость асинхронного двигателя зависит от скольжения двигателя, которое изменяется в зависимости от нагрузки и сопротивления ротора. Другими словами, скорость асинхронного двигателя может изменяться в зависимости от нагрузки или за счет изменения сопротивления ротора.
Связанное сообщение:
Различия между синхронным двигателем и асинхронным двигателем В следующей таблице показаны основные различия между синхронным двигателем и асинхронным (индукционным) двигателем.
| Синхронный двигатель | Асинхронный двигатель |
| Синхронный двигатель – это тип двигателя переменного тока, который работает с синхронной скоростью. | Асинхронный двигатель – это тип двигателя переменного тока, который работает со скоростью, меньшей, чем синхронная скорость. |
| Он работает по принципу магнитной блокировки между полем ротора и статора. | Он работает по принципу электромагнитной индукции между статором и ротором. |
| Нет скольжения, т.е. скольжение синхронного двигателя равно 0. | В асинхронном двигателе есть скольжение, и оно всегда больше 0. |
| Скорость двигателя зависит от частоты питания и количество полюсов статора. Н с = 120 f / P | Скорость двигателя зависит от нагрузки, сопротивления ротора и скольжения, с. это всегда меньше синхронной скорости. N = N с (1-с) N |
Скорость не меняется при изменении нагрузки, подключенной к двигателю. | Скорость меняется в зависимости от нагрузки двигателя. |
| Это не самозапуск и требует дополнительных обмоток для запуска двигателя. | Асинхронные двигатели самозапускаются и не требуют дополнительных механизмов. |
| Ротор требует дополнительного источника тока. | Ротор асинхронного двигателя не требует дополнительного питания. |
| Синхронному двигателю с отдельным возбуждением требуется дополнительный источник постоянного тока для питания обмотки ротора. | Не требует дополнительных источников. |
| Также необходимы контактные кольца и щетки для подачи постоянного тока на обмотки ротора. | Для него не требуются контактные кольца, однако для управления скоростью можно использовать контактные кольца с намоткой. |
| Скорость двигателя регулируется только путем изменения частоты питания с помощью частотно-регулируемого привода. | Скорость двигателя можно регулировать, используя переменное сопротивление ротора, а также устройства частотно-регулируемого привода. |
| Источник входного напряжения не изменяет скорость или крутящий момент синхронного двигателя. | Источник входного напряжения можно использовать для изменения крутящего момента и скорости двигателя. |
| Колебания основного напряжения питания не влияют на работу синхронного двигателя. | Колебания сетевого напряжения влияют на его скорость и работу. |
| Начальная стоимость выше, чем у асинхронного двигателя. | Асинхронные двигатели дешевле. |
| Операция сложная. | Операция проста и удобна для пользователя. |
| Если предлагают высокую эффективность и точность. | Они не так эффективны, как синхронный двигатель. |
| Может легко работать на очень низкой скорости с помощью частотно-регулируемого привода. | Работать на малой скорости довольно сложно. |
Лучше всего работает на более низких оборотах, обычно ниже 300 об / мин. | Лучше всего подходит для работы на скорости выше 600 об / мин. |
| Может работать с отстающим, опережающим или единичным коэффициентом мощности, регулируя его возбуждение. | Асинхронный или асинхронный двигатель всегда работает с отстающим коэффициентом мощности. |
| Его также можно одновременно использовать для коррекции коэффициента мощности, используя его в качестве опережающего коэффициента мощности. | Его нельзя использовать для корректировки коэффициента мощности, а только для управления механическими нагрузками. |
| Поскольку он работает с постоянной скоростью, резкое изменение нагрузки вызовет колебания потребляемого тока. | В асинхронном двигателе такого явления нет. |
Вывод этой статьи состоит в том, что синхронные двигатели эффективны, но дороже и используются для приложений со сверхнизкими оборотами, предлагая при этом функцию коррекции коэффициента мощности.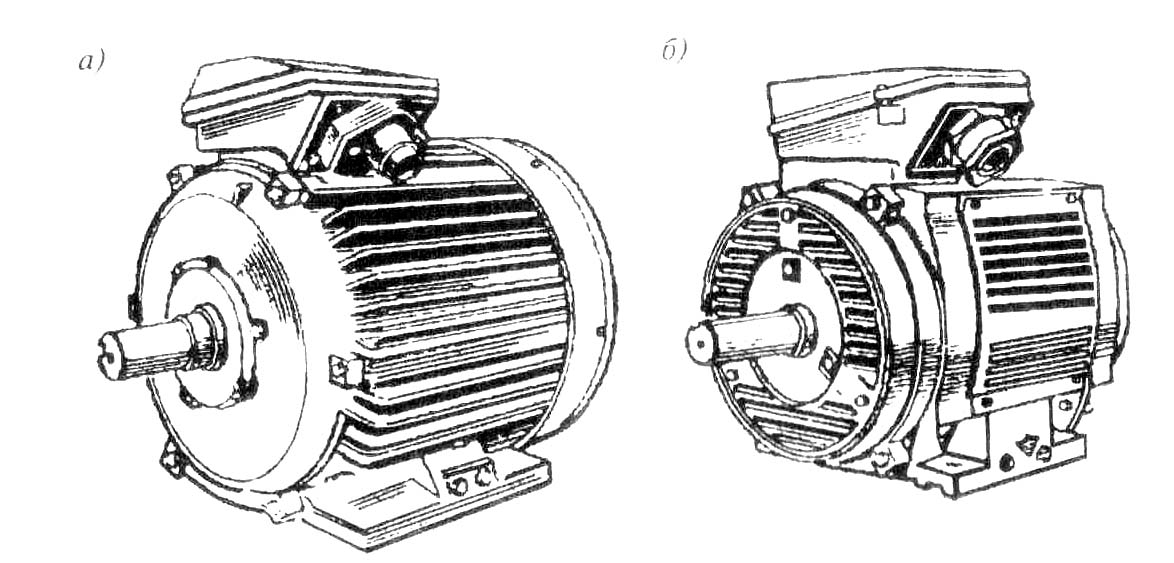 С другой стороны, асинхронные двигатели используются для высоких оборотов с регулируемой скоростью, будучи недорогими и простыми в эксплуатации.
С другой стороны, асинхронные двигатели используются для высоких оборотов с регулируемой скоростью, будучи недорогими и простыми в эксплуатации.
Связанный пост об электрических двигателях.
Электродвигатели– различные типы и применения каждого
Двигатель – это удобное устройство, которое вырабатывает механическую энергию из электрической энергии. Сегодня двигатели используются как в жилых, так и в промышленных условиях. Однако выбор двигателя будет зависеть от ваших конкретных потребностей.
Во-первых, разные типы двигателей на рынке делают процесс покупки утомительным. Вы должны выбирать между двигателями переменного тока, двигателями постоянного тока и двигателями специального назначения.
Типы двигателей переменного тока
Асинхронный двигатель переменного тока
Асинхронный двигатель – это наиболее распространенный тип электродвигателя переменного тока на современном рынке. Асинхронный двигатель переменного тока работает с импульсом ниже его синхронной скорости. Здесь электрический ток создает крутящий момент в роторе. Асинхронные двигатели используют электромагнитную индукцию для преобразования энергии из электрической в механическую.
Классификация асинхронных двигателей основана на типе ротора; беличья клетка или контактное кольцо.Асинхронные двигатели отлично подходят для промышленности из-за их допустимой нагрузки.
Конструкция компрессоров, насосов, подъемных механизмов и конвейерных систем входит в число его многочисленных областей применения.
Синхронный двигатель переменного тока
Этот тип двигателя в основном зависит от трехфазного источника питания. Статор генерирует ток возбуждения, в то время как ротор зависит от тока возбуждения для своего вращения. Скорость вращения ротора соответствует частоте подаваемого тока.В этом двигателе импульс не зависит от нагрузки.
Синхронные двигателипеременного тока находят множество применений в робототехнике, управлении технологическими процессами и автоматизации. Эти двигатели используются в большинстве приводов с постоянной скоростью.
Типы двигателей постоянного тока
Матовый двигатель постоянного тока
В этом двигателе устройство щеток статора определяет ток. Его крутящий момент создается от источника постоянного тока с помощью электромагнитов. Они дешевы и очень эффективны.
В машинах с высоким пусковым моментом, таких как краны, подъемники и лифты, используются щеточные электродвигатели постоянного тока.Они также применимы для целей с постоянной скоростью, таких как пылесосы и конвейеры.
Бесщеточный двигатель постоянного тока
Эти двигатели обеспечивают высокую производительность при меньшем размере по сравнению с щеточными двигателями постоянного тока. Они работают с контактными кольцами, коммутаторами или встроенным контроллером.
Их эффективность, улучшенный динамический отклик, бесшумная работа и высокая скорость переключения делают их отличным выбором для большинства отраслей промышленности. Фиксированная нагрузка, переменная нагрузка и положение зависят от этого типа двигателя.
Другие типы двигателей
Серводвигатели
Это двигатели, соединенные с датчиками обратной связи для помощи в позиционировании, что является ключом к робототехнике. Они позволяют точно контролировать угловое положение, ускорение и скорость. Серводвигатели обладают высокой эффективностью и точностью, поэтому используются во вращающихся компонентах машин.
Его применение включает строительство игрушек, автомобилей, самолетов, бытовой электроники и т. Д.
Шаговый двигатель
Судя по названию, шаговые двигатели работают ступенчато.Он преобразует электрическую энергию в обширные дискретные механические ступени. Поскольку другие двигатели вращаются на 180 градусов, шаговые двигатели могут делать десять шагов по 18 градусов каждый.
В этом случае для завершения оборота потребуется десять электрических импульсов. Они используются в плоттерах, изготовлении схем, инструментах управления технологическим процессом, медицинских сканерах, жидкостных насосах, респираторах, автоматической фокусировке цифровых камер и т. Д.
Гистерезисный двигатель
В гистерезисных двигателях магнитные поля статора и ротора противоположны.Как только ротор намагничен, вам потребуется мощное обратное магнитное поле, чтобы перевернуть его. Гистерезис и вихревые токи от ротора создают крутящий момент.
Двигателис гистерезисом могут генерировать крутящий момент без пульсаций, пока вы не достигнете синхронной скорости. Они используются при изготовлении звуковых проигрывателей, диктофонов и т. Д.
В Mader Electric наша команда экспертов готова помочь вам со всеми вашими потребностями в обслуживании двигателей как в бизнесе, так и в быту. Свяжитесь с нами сегодня с любыми вопросами или проблемами, связанными с электродвигателями, и наши специалисты будут рады помочь вам найти нужные решения.
Асинхронный двигатель | Двигатель переменного тока
Асинхронный двигатель – это электродвигатель, приводимый в действие переменным током. Следовательно, это то, что мы называем двигателем переменного тока. Этот тип двигателя также известен как асинхронный двигатель.
Асинхронный двигатель основан на токах, индуцируемых в роторе вращающимся магнитным полем статора. Вот почему это называется индукционной машиной. Чтобы иметь возможность индуцировать электрический ток в роторе, необходимо, чтобы ротор подвергался изменению магнитного потока, создаваемого статором с частотой мощности или синхронизма, ротор размагничивается, когда он достигает синхронизма, поскольку не видит изменения магнитного потока.По этой причине двигатель вращается с другой скоростью, чем поле статора, и поэтому вращается асинхронно.
Асинхронные или асинхронные двигатели, будучи прочными и дешевыми, являются наиболее широко используемыми двигателями в промышленности. В этих двигателях вращающееся поле имеет синхронизацию скорости в соответствии с частотой питающей линии.
Асинхронный двигатель – наиболее распространенный тип электродвигателя. В частности, трехфазный асинхронный двигатель является наиболее часто используемым типом двигателя в промышленности.Этот успех в основном обусловлен следующими причинами:
- По сравнению с другими электродвигателями такой же мощности их стоимость ниже.
- Это очень простые двигатели, очень удобные в обслуживании.
- Асинхронный двигатель имеет лучшие характеристики по сравнению с однофазным двигателем. По этой причине однофазный двигатель используется в небольших бытовых приборах и приборах.
Важной особенностью асинхронных электродвигателей является то, что вы не можете постепенно изменять скорость или, следовательно, мощность.Рабочая скорость асинхронных двигателей зависит от частоты питания и количества полюсов.
Типы асинхронных двигателей
Классификация различных типов асинхронных двигателей зависит от используемого напряжения переменного тока:
- Трехфазный асинхронный двигатель. Этот тип двигателя использует ток 400 В.
- Однофазный асинхронный двигатель. Этот тип двигателя использует ток 230 В.
Трехфазный асинхронный двигатель может запускаться разными способами: звезда-треугольник, преобразователем частоты, сопротивлением статора или резисторами ротора.Зависит от характеристик двигателя.
Трехфазный двигатель – это надежный двигатель, не требующий переключателя. Большинство трехфазных асинхронных двигателей имеют сбалансированную нагрузку. Это двигатели, которые потребляют одно и то же в трех фазах, независимо от того, соединены ли они звездой или треугольником. Напряжения в каждой фазе в этом случае равны результату деления линейного напряжения на корень из трех. Например, если линейное напряжение составляет 400 вольт, то напряжение каждой фазы составляет 230 вольт.
Двигатель с короткозамкнутым ротором
Двигатель с короткозамкнутым ротором – это тип асинхронного двигателя. В типе электродвигателя ротор состоит из ряда стержней, расположенных в канавках венца ротора, соединенных своими концами с двумя кольцами. Пусковой крутящий момент небольшой, а поглощаемая ими интенсивность высокая.
Подавляющее большинство асинхронных двигателей имеют короткозамкнутый ротор.
Ротор Роторный двигатель
Роторный двигатель с фазным ротором является одним из электродвигателей переменного тока. В этом типе двигателя в пазы венца ротора вставлены обмотки, соединенные общей точкой.Этот тип двигателя имеет несколько медных колец, называемых контактными кольцами, которые вращаются, при этом вал входит в контакт между ним и некоторыми щетками, которые позволяют соединять обмотки ротора с внешней стороной.
Преимущество ротора с фазной обмоткой состоит в том, что они позволяют осуществлять постепенный запуск с помощью резисторов ротора, в настоящее время при использовании электростартеров и инверторов они не нужны, а их производство очень ограничено.
Строительство, работа, различия и применение
В электрических машинах, таких как двигатели, мы часто путаемся с типами двигателей, такими как синхронный двигатель, а также с асинхронным двигателем с их применением.Эти двигатели используются в различных приложениях благодаря надежности, а также прочности. Как следует из названия, название этого двигателя происходит от того факта, что ротор в двигателе работает асинхронно с вращающимся магнитным полем. Итак, в этой статье дается обзор асинхронного двигателя, конструкции, принципа работы и т. Д.
Что такое асинхронный двигатель?
Определение: Электродвигатель, работающий на переменном токе, известен как асинхронный двигатель.Этот двигатель в основном работает на индуцированном токе внутри ротора от вращающегося магнитного поля статора. В этой конструкции двигателя движение ротора не может быть синхронизировано через движущееся поле статора. Поле вращающегося статора этого двигателя может индуцировать ток в обмотках ротора. В свою очередь, этот ток будет создавать силу, толкающую ротор в направлении статора. В этом двигателе, поскольку ротор не совпадает по фазе со статором, создается крутящий момент.
Асинхронный двигательЭто наиболее распространенный тип двигателя.В частности, в промышленности используется трехфазный асинхронный двигатель по таким причинам, как низкая стоимость, простота обслуживания и простота обслуживания. Характеристики этого двигателя хороши для сравнения с однофазным двигателем. Основная особенность этого мотора в том, что скорость не может быть изменена. Рабочая скорость этого двигателя в основном зависит от частоты источника питания, а также от номера. полюсов.
Конструкция асинхронного двигателя
В этой конструкции двигателя нет магнитов.В этой конструкции двигателя фазы могут быть соединены с катушками. Так что магнитное поле может быть создано. В этом двигателе ток внутри ротора может быть активирован за счет индуцированного напряжения вращающегося поля. Как только магнитное поле проходит через ротор, на роторе индуцируется напряжение. Потому что магнитное поле ротора может быть создано за счет магнитного поля статора. Обычно магнитное поле ротора движется асинхронно по направлению к магнитному полю статора или с задержкой во времени.Таким образом, задержка между двумя магнитными полями может быть известна как «проскальзывание».
Конструкция асинхронного двигателяАсинхронный двигатель рабочего
Принцип работы этого двигателя почти такой же, как и у двигателя синхронного типа, за исключением внешнего возбудителя. Эти двигатели, также называемые асинхронными двигателями, работают по принципу электромагнитной индукции, когда ротор в этом двигателе не получает никакой электроэнергии за счет теплопроводности, как в случае двигателей постоянного тока. У этих двигателей нет внешних устройств для стимуляции ротора внутри двигателя.Таким образом, скорость вращения ротора в основном зависит от нестабильной магнитной индукции.
Изменяющееся электромагнитное поле может вызвать вращение ротора с меньшей скоростью, чем магнитное поле статора. Когда скорость ротора, а также скорость магнитного поля внутри статора изменяется, эти двигатели называются асинхронными двигателями. Изменение скорости можно назвать скольжением.
Разница между синхронным и асинхронным двигателем
Различия между синхронным и асинхронным двигателем указаны в следующей таблице.
| Функция | Синхронный двигатель | Асинхронный двигатель |
| Определение | Это один из видов машин, в котором скорость ротора и скорость магнитного поля статора эквивалентны. N = NS = 120f / P | Это один из видов машин, в которых ротор вращается с меньшей скоростью по сравнению с синхронной скоростью. N меньше NS |
| Тип | Типы синхронных: переменное сопротивление, бесщеточный, гистерезисное и переключаемое сопротивление. | Асинхронный двигательAC также известен как асинхронный двигатель. |
| Накладка | Значение скольжения этого двигателя равно нулю | Значение скольжения этого двигателя не равно нулю |
| Стоимость | Дорого | Меньше стоимости |
| КПД | Высокоэффективный | Низкоэффективный |
| Скорость | Скорость двигателя не зависит от несоответствия нагрузки. | Скорость двигателя уменьшается при увеличении нагрузки. |
| Электропитание | Электропитание может подаваться на ротор двигателя | Ротор в этом двигателе не нуждается в токе. |
| Самозапуск | Этот двигатель не запускается автоматически | Этот двигатель самозапускающийся |
| Крутящий момент | Если приложенное напряжение изменится, это не повлияет на крутящий момент этого двигателя | Как только приложенное напряжение изменится, это повлияет на крутящий момент этого двигателя |
| Коэффициент мощности | Коэффициент мощности может быть изменен после изменения возбуждения на основе запаздывания, единицы или опережения. | Он просто работает с отстающим коэффициентом мощности. |
| Приложения | Эти двигатели применяются в промышленности, на электростанциях и т. Д. Этот двигатель также используется в качестве регулятора напряжения | Эти двигатели применяются в вентиляторах, центробежных насосах, бумажных фабриках, воздуходувках, лифтах, компрессорах, текстильных фабриках и т. Д. |
Преимущества
К преимуществам асинхронного двигателя можно отнести следующее.
- Стоимость за вычетом
- Простота обслуживания
- КПД высокий при работе с частичной нагрузкой
- Подходит для высоких скоростей вращения, что позволяет достигать высоких оборотов в секунду вместе с инверторами VECTOPOWER.
Приложения
Большинство двигателей, используемых в различных приложениях в мире, являются асинхронными.Приложения в основном включают следующее.
- Центробежные насосы
- Воздуходувки
- Вентиляторы
- Конвейеры
- Компрессоры
- Краны большой грузоподъемности
- Подъемники
- Токарные станки
- Бумажные фабрики
- Масляные заводы
- Текстиль
Часто задаваемые вопросы
1). Почему асинхронный двигатель еще называют асинхронным двигателем?
Асинхронный двигатель зависит от индуцированного тока внутри ротора от вращающегося магнитного поля в статоре.
2). Какие бывают типы асинхронных двигателей?
Это однофазные и трехфазные двигатели
3). В чем главная особенность асинхронного двигателя?
Основной особенностью этого двигателя является то, что скорость не может изменяться.
4). Каков коэффициент мощности асинхронного двигателя?
Этот мотор работает просто на отстающей п.ф.
Итак, это все об асинхронном двигателе. Эти двигатели часто используются в 90% приложений по всему миру из-за высокой прочности и надежности.Эти двигатели используются в различных движущихся или вращающихся машинах, таких как лифты, вентиляторы, шлифовальные машины и т. Д. Вот вопрос к вам, каковы недостатки асинхронного двигателя?
Какие типы электродвигателей бывают? DC Brushed, Asynchronous and Synchronous
Свяжитесь с Valin сегодня для получения дополнительной информации по телефону (855) 737-4716 или заполните нашу онлайн-форму. The Motion Control Show Мы уже говорили о том, что такое электродвигатель, теперь я собираюсь поговорить о нескольких различных типах электродвигателей.В частности, я собираюсь поговорить о щеточных двигателях постоянного тока, асинхронных и синхронных. Я Кори Фостер из Valin Corporation. Посмотрим, что мы можем узнать.Есть много людей, которые знают о некоторых типах электродвигателей больше, чем я, поэтому я обратился к моему хорошему другу и коллеге Джону Брокоу, чтобы он поделился своим мнением по некоторым из этих типов.
КОРИ: Джон, что вы можете сказать мне о щеточном двигателе постоянного тока?
ДЖОН: Это самый старый школьный грязный мотор в творении.Эта штука была повсюду. Посмотрите на слайды, изобретенные Фарадеем в 1821 году. Итак, это 200-летняя технология. На самом деле он все еще используется во многих приложениях, потому что он относительно недорог. У него есть несколько известных проблем, о которых все знают. Чаще всего это износ щеток. У вас есть эти керамические угольные щетки, которые пропускают ток к вращающемуся ротору, и из-за износа этих щеток они, как и все остальное, со временем изнашиваются, и их нужно заменять.Это приведет к падению вашего мотора, на каком бы транспортном средстве он ни работал, и это просто неприятность.
COREY: Итак, если здесь щеточный электродвигатель постоянного тока коммутируется обрывом проводов и этих щеток, электродвигатель переменного тока фактически коммутируется синусоидальной частотой входящего переменного тока и идет на контакторы здесь. Теперь это показывает, что катушка находится внутри, но на самом деле обычно катушка – это статор снаружи с ротором внутри, который вращается.Но это хорошо для сравнения. Разница между переменным и постоянным током и как они коммутируются.
Прежде чем я буду говорить об асинхронных двигателях, давайте поговорим о синхронном и асинхронном. В асинхронном двигателе переменного тока нет магнитов, поэтому он фактически вращается медленнее, чем синхронная скорость входящей в него частоты. Я уже говорил о том, как двигатель переменного тока переключается с входящей частоты переменного тока, 60 Гц здесь, в США, но асинхронный двигатель, поскольку у него нет магнитов, на самом деле будет отставать от этого, и он всегда будет работать на настигнуть.Итак, вы можете видеть, что это частота, умноженная на 120, деленная на количество полюсов за вычетом некоторого сдвига. Таким образом, он всегда будет работать, чтобы наверстать упущенное, в то время как синхронный двигатель имеет несколько постоянных магнитов, поэтому он привязан к регулируемой частоте, которая входит в него, и всегда будет вращаться с этой синхронной скоростью.
Для этого мне нужно вернуться к Джону Брокоу. Джон, асинхронные и асинхронные двигатели – это одно и то же?
JOHN: Все асинхронные двигатели переменного тока асинхронные.Но вы можете получить из них синхронные, псевдосинхронные приложения, сочетая их с обратной связью и выполняя над ними векторное управление. Вот где вы фактически контролируете угол между этими двумя и регулируете эту частоту скольжения, чтобы она была именно там, где вы хотите быть, для создания характеристик крутящего момента / скорости приложения.
А вот и внутренности асинхронного двигателя переменного тока. Вы можете видеть, что это классический асинхронный двигатель, в котором вы не видите никаких щеток или чего-либо, приближающегося к нему.У вас есть этот роторный узел посередине, который привязан к проходящему через него валу. Единственный изнашивающийся компонент типичного асинхронного двигателя переменного тока – это подшипники, которые вы видите на концах двигателя. Существует ряд аксессуаров, которые можно добавить к асинхронному двигателю в зависимости от области применения. Один из основных вопросов, о котором хочется подумать, – это охлаждение. У этого есть вентилятор. Это выглядит как полностью закрытый двигатель с вентиляторным охлаждением. У вас также могут быть герметичные невентилируемые двигатели.У вас может быть открытый мотор, в котором воздух проходит через него. Вы можете обдувать эти штуки воздухом. На двигатель можно надеть рубашку гидравлического охлаждения. Есть много разных способов охладить мотор. В конце концов, нужно помнить, что электродвигатель представляет собой катушку из меди, и вы пропускаете через нее электричество. Когда такое случается, это электрический обогреватель. Таким образом, вы собираетесь генерировать тепло в системе и каким-то образом его нужно отводить.Управление теплом – один из ключевых вопросов при выборе, определении размеров и эксплуатации двигателей.
Другими видимыми точками износа являются подшипники. Подшипники, как и любые другие подшипники, как подшипники в вашем автомобиле, в конечном итоге вам придется заменить их, потому что они действительно изнашиваются. Существуют и другие аксессуары, прокладки, уплотнения, разные вещи в зависимости от среды, в которую вы фактически помещаете свой асинхронный двигатель, и от области применения.
COREY: Давайте поговорим об асинхронных двигателях и частотно-регулируемых приводах, которые их запускают.Что вы о них думаете?
ДЖОН: ЧРП великолепны. Это действительно зависит от приложения, потому что обычно речь идет о паре разных вещей. Один из них – что ты хочешь? Как вы хотите, чтобы мотор заводился? И есть несколько способов сделать это. Вы можете начать через черту. Это означает, что в основном у вас просто есть выключатель, и вы в основном идете YAK, и внезапно ток начинает выходить из электрической сети. Проблемы с этим. Это немного тяжело для мотора, потому что вы создаете скачок в моторе.Это также может повлиять на вашу местную электросеть, и компьютерам в этой системе действительно не нравится, когда вы это делаете. Это действительно грубый способ запустить мотор. Это сделано. Это сделано в разных местах, где это не имеет значения. Скажем, если вы используете насос для ирригации, вы обычно используете выделенную линию. Вокруг не так много компьютеров, которые будут к нему чувствительны. Вы просто бросаете вещь и запускаете насос.
Другой метод – плавный пуск.Это электронные компоненты, которые в основном медленно повышают напряжение в течение 5, 10, 15 секунд, чтобы это закрытие было немного более плавным. Это намного проще для двигателя, и ваша электрическая сеть будет генерировать намного меньше шума. Это старый и грязный способ запуска электродвигателя, который применялся за пару сотен лет.
С 60-х годов у нас были преобразователи частоты. С появлением полупроводников мы получили возможность выполнять различные широтно-импульсные модуляции для управления частотой асинхронного двигателя переменного тока.Помните, двигатели следуют входящей в них частоте. Итак, регулируя частоту, вы можете регулировать скорость двигателя. У этого есть много преимуществ. Применение насоса: вы можете фактически контролировать, сколько воды вы перекачиваете, в зависимости от кривой двигателя насоса. Повышает эффективность. Вы можете оптимизировать приложение. Затем вы также можете медленно увеличивать скорость, чтобы вы не просто замыкали линию, что делает ее более плавной и намного более чистой для электросети.Обратите внимание на некоторые VFD, в которые вам может потребоваться установить какой-то фильтр, потому что они создают некоторые гармоники, которые могут подаваться обратно в вашу электросеть, но в целом VFD является намного более чистым с точки зрения электричества способом установки и запуска двигателя.
COREY: Чтобы понять суть синхронного двигателя, он характеризуется постоянной скоростью вращения, которая не зависит от нагрузки, но связана с частотой питания или током в зависимости от типа привода. Отсюда и термин «синхронный», и в основном это делается с помощью постоянных магнитов, которые находятся там.Если вы посмотрите на конструкцию, то она выглядит несколько иначе, чем асинхронный двигатель переменного тока. Я хочу попросить Джона Брокоу указать нам на несколько вещей.
Джон: Обратите внимание, что в синхронном двигателе есть пара вещей, которые всегда будут там. У вас всегда будет отзыв о синхронном двигателе. Вы делаете это, потому что вам нужно знать, где на самом деле находятся магниты, потому что они чередуются с севером, югом, севером и югом вокруг ротора. Как вы можете видеть на схеме в правом нижнем углу, вы можете видеть все маленькие магниты, установленные на поверхности, и они на самом деле, если вы на самом деле поместите туда магнит, вы действительно увидите их чередующиеся север, юг, Север, Юг, Север, Юг при обходе ротора.Это то, против чего катушки реагируют и могут вращать это, поочередно. Без обратной связи с устройством вы не будете знать, где вы должны включить или выключить правую катушку, и в конечном итоге система будет бороться сама с собой.
КОРИ: Итак, Джон, действительно возникает вопрос, синхронные и серводвигатели – это одно и то же?
JOHN: Все серводвигатели переменного тока являются синхронными двигателями. Все синхронные двигатели не являются серводвигателями. Есть несколько необычных двигателей, которые являются синхронными, но не серводвигателями; переключаются реактивные двигатели, шаговые двигатели являются синхронными, потому что они следуют частоте, но они не серводвигатели.
COREY: Если расположить два типа двигателей рядом, вы можете увидеть, как их конструкция похожа, но также и чем она отличается. Асинхронные двигатели могут быть огромными. Они могут быть совершенно огромными, размером с небольшую комнату. Синхронные двигатели и магниты становятся слишком дорогими, так что они действительно не будут больше, чем большая кошка, обычно самое большее. Но есть несколько сходств, несколько отличий.
Так вот, Джон действительно хотел убедиться, что я объяснил важность расчета лошадиных сил.Мощность равна крутящему моменту, умноженному на скорость. Мощность может быть выражена в лошадиных силах или в ваттах. Вычисление, которое я люблю использовать, просто из памяти, состоит в том, что мощность в лошадиных силах равна крутящему моменту в унциях и дюймах, умноженному на скорость в оборотах в секунду, деленному на 16 800. Это важно, потому что асинхронные двигатели и двигатели переменного тока рассчитаны в лошадиных силах, но если у вас есть серводвигатель, у нас есть кривые скорость / крутящий момент, которые часто выглядят так, где у вас есть крутящий момент здесь и скорость здесь. Это практически одна и та же мощность от начала до конца, но это производство крутящего момента и скорости, поэтому мы не говорим о выборе серводвигателя или синхронного двигателя часто с точки зрения мощности.Мы говорим об этом с точки зрения скорости и крутящего момента. (Один двигатель может иметь высокий крутящий момент, а другой – высокую скорость, но такую же мощность.) Итак, если кто-то хотел перейти от двигателя переменного тока к серводвигателю, он не может просто сказать: эй, дайте мне 1 киловатт.
