
Светофор на ПЛК – все языки МЭК 61131-3 / Хабр
В прошлой статье Светофор на ПЛК – 30 блоков программа для ПЛК светофора была написана только на FBD.Новая программа использует все 5 языков стандарта МЭК 61131-3.
Первая секция на IL.
Это похожий на ассемблер язык.
В секции всего 2 строки:
LD — загрузка значения в аккумулятор
S — установка переменное в true, если в аккумуляторе true, иначе переменная не изменяется.
Генератор импульсов периодом 0,5 секунды написан на FBD, как и в предыдущей версии.
Основная секция написана на SFC. Как мне кажется, это самый сложный для применения язык в стандарте МЭК 61131-3.
Программа состоит из шагов и переходов.
При запуске программы выполняется шаг Init.
Следующий шаг выполняется, если усовие перехода за ним истинно. Шаг может быть выполнен с задержкой, время шага может быть ограничено.
На рисунке ниже только однин переход содержит условие. Остальные переходы выполняются всегда.

В конце цепочки выполняется безусловный переход на метку WaitPeople.
Каждый шаг выполняется с задержкой, соответсвующей требуемому времени пребывания светофора в заданном состоянии.
При выполнении каждого шага выполняется опеределенное действие. В моей программе задано выполнение секции на языке ST.
В проекте добавлена переменная uState, соответсвующая состоянию светофора.
Вот содержимое всех секций, выполнемых по шагам:
Секция на ST в зависимости от состояния uState записывает значение на булевские переменные, которые потом будут переписаны на выходы. Это можно было сделать в секциях stStep_1..stStep_8, но тогда бы вы не увидели оператора CASE и не поняли бы, что ST — самый близкий для программиста язык из стандарта МЭК 61131-3. Так же в этой секции введена защита от программных ошибок в виде мигающего желтого при неопределенном состоянии.
Язык LD близок к схемам релейной логики. Основа LD — контакты и катушки. На схеме видно, что слева расположен проводник, от которого «напряжение» (true) распростроняется направо по ответвлениям.
Нормально разомкнутый контакт (похож на конденсатор) замыкается, если привязанная к нему переменная истинна.
Нормально замкнутый контакт (похож на конденсатор со слэшем внутри) замыкается, если привязанная к нему переменная ложна.
Катушка (2 скобки) пропускает «напряжение» через себя и переписывает его значение (false или true) в привязанную к ней переменную.
В программе данная секция используется для того, чтобы переписать промежуточные переменные в переменные, привязанные к выходам, с защитой от программной ошибки. Зеленый свет загарается только если нет красного на данном светофоре и зеленого на другом светофоре.
Результат работы программы:
Применение всех 5 языков в одной программе не оправдано. Но в реальных проектах иногда приходится применять одновременно 2..3 языка. Чаще всего я использую ST, реже FBD, еще реже IL. SFC и LD в реальных проектах мне применять не приходилось.
UPD. Сделал исправление — убрал лишний ноль из названия стандарта по замечанию RouR
UPD2. Небольшое изменение в описании LD.
Использование языков МЭК 61131-3 для программирования логических контроллеров Текст научной статьи по специальности «Компьютерные и информационные науки»
СИМВОЛ НАУКИ ISSN 2410-700X № 1/2020
самопередвижение техники и образованию глубоких колей, что будет мешать технике.
Поэтому лучший вариант – увеличение скорости движения. В этом направлении ведутся работы по совершенствованию трансмиссии. Сейчас большинство лесопромышленных тракторов оснащены механическими ступенчатыми трансмиссиями, имеющими ряд недостатков, влияющих на общую производительность. Переход на гидростатические и гидродинамические гидромеханические трансмиссии и выбор их оптимальных характеристик для конкретного назначения позволит значительно повысить производительность.
Замена трансмиссии позволит обеспечить использование высокой мощности в широком диапазоне тяговых сопротивлений, снизит утомляемость операторов машин, позволит переключать передачи под нагрузкой. В результате производительность существенно повысится.
Все другие методы увеличения производительности не дадут существенного результата, если не будут решены озвученные проблемы.
И еще один способ увеличения КПД, который ранее учитывался в недостаточной степени. Необходимо решить задачи по повышению комфортности место операторов лесозаготовительной техники. Согласно исследованиям работники зачастую не увеличивают скорость передвижения, хотя имеют такую возможность, из-за того, что такие действия приведут к его личному дискомфорту.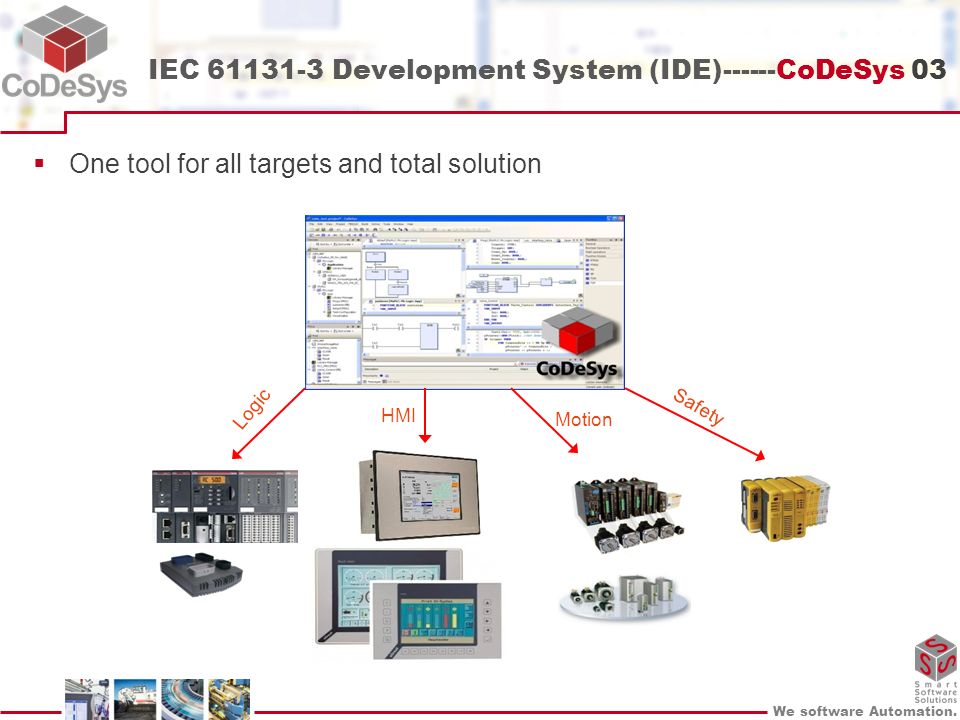
1. Единые нормы выработки и расценки на лесозаготовительные работы нормативно-производственное издание. – М: Экономика, 1989)
2. Кочегаров, В.Г. Технология и машины лесосечных работ [Текст]: учеб. для вузов / Б.Г. Кочегаров, Ю.А. Бит, В.Н. Меньшиков, 1990.
3. Никишов, В.Д. Комплексное использование древесины [Текст]: учеб. для вузов / В.Д. Никишов. – М.: Лесная промышленность, 1985.
4. Матвейко А. П., «Технология и оборудование лесозаготовительного производства», 2006 г.
© Тимофеев И.С., 2020
УДК 004.431.2
Черкасов А.С.,
студент 2 курса магистратуры, Амурский государственный университет, Благовещенск
samael5329@yandex. ru
ru
Научный руководитель: Семичевская Н.П., канд. техн. наук, доцент Амурский государственный университет, Благовещенск
ИСПОЛЬЗОВАНИЕ ЯЗЫКОВ МЭК 61131-3 ДЛЯ ПРОГРАММИРОВАНИЯ ЛОГИЧЕСКИХ КОНТРОЛЛЕРОВ
Аннотация
Любая машина, способная автоматически выполнять некоторые операции, имеет в своем составе управляющий контроллер. Физически, ПЛК представляет собой блок, имеющий определенный набор выходов и входов, для подключения датчиков и исполнительных механизмов. Задачей прикладного программирования ПЛК является только реализация алгоритма управления конкретной машиной. Благодаря стандартизации языков программирования прикладная программа может быть использована в любом ПЛК, поддерживающем данный стандарт.
СИМВОЛ НАУКИ ISSN 2410-700X № 1/2020
Ключевые слова
Логический контроллер, МЭК Р 61131-3, Pascal, функциональные блоки.
Стандарт МЭК 61131-3 описывает 5 языков программирования, которые являются результатом изучения наиболее успешных фирменных разработок мировых лидеров на рынке ПЛК. Настоящий стандарт устанавливает синтаксис и семантику унифицированного набора языков программирования для программируемых контроллеров (PC). Данный набор состоит из двух текстовых языков программирования, списка инструкций (IL) и структурированного текста (ST), и двух графических языков, релейно-контактных схем (LD) и функциональных блоковых диаграмм (FBD). Дополнительный набор графических и эквивалентных текстовых элементов, именуемый последовательная функциональная схема (SFC), определяется для структурирования внутренней организации программ и функциональных блоков программируемого контроллера. №исйоп List, список инструкций) – представляет собой текстовый язык программирования низкого уровня, который очень похож на ассемблер, но не привязан к конкретной архитектуре процессора. Он позволяет описывать функции, функциональные блоки и программы, а также шаги и переходы в языке SFC. Одним из ключевых преимуществ IL является его простота и возможность добиться оптимизированного кода для реализации критических секторов программ. Особенности IL делают его неудобным для описания сложных алгоритмов с большим количеством разветвлений.
№исйоп List, список инструкций) – представляет собой текстовый язык программирования низкого уровня, который очень похож на ассемблер, но не привязан к конкретной архитектуре процессора. Он позволяет описывать функции, функциональные блоки и программы, а также шаги и переходы в языке SFC. Одним из ключевых преимуществ IL является его простота и возможность добиться оптимизированного кода для реализации критических секторов программ. Особенности IL делают его неудобным для описания сложных алгоритмов с большим количеством разветвлений.
Язык ST (Structured Text, структурированный текст) – это текстовый язык высокого уровня общего назначения, по синтаксису схожий с языком Pascal. Удобен для программ, включающих числовой анализ или сложные алгоритмы, и работы с аналоговыми сигналами и числами с плавающей точкой. Может использоваться в программах, в теле функции или функционального блока, а также для описания действия и перехода внутри элементов SFC.
LD (Ladder Diagram, рус. РКС) – графический язык, основанный на принципах релейно-контактных схем (элементами релейно-контактной логики являются: контакты, обмотки реле, вертикальные и горизонтальные перемычки и др.) с возможностью использования большого количества различных функциональных блоков. Достоинствами языка LD являются: представление программы в виде электрического потока (близкого специалистам по электротехнике), наличие простых правил, использование только булевых выражений.
Применяются также названия, как язык релейно-контактной логики, релейные диаграммы, релейно-контактные схемы (РКС).
LD отлично подходит для реализации комбинационных логических схем и конечных автоматов. Благодаря возможности включения функций и функциональных блоков в LD, выполненных на других языках, имеет практически не ограниченную сферу применения.
Язык FBD похож на электрические схемы, поэтому удобен для не имеющих опыта логического программирования инженеров-схемотехников, которые могут с легкостью составить электрическую схему системы управления на базе «жесткой логики». FBD подходит для управления непрерывными процессами и процессами регулирования.
При программировании на данном языке применяются наборы стандартных библиотек, а так же могут быть использованы собственные функциональные блоки, написанные на языке FBD, на других языках стандарта МЭК 61131-3 или же на языке С. Подобные блоки могут быть многократно использованы в разных частях программы. FBD заимствует символику булевой алгебры.
К преимуществам языка FBD относятся простота создания, наглядность, четкая последовательность, легкая структура команд, надежный и быстрый код. Язык FBD использует такие же команды, как и LD, но сама схема визуально более понятна пользователю, не обладающему знаниями релейной логики.
Язык FBD использует такие же команды, как и LD, но сама схема визуально более понятна пользователю, не обладающему знаниями релейной логики.
Язык функциональных блок-схем идеально подходит для создания простых пользовательских
СИМВОЛ НАУКИ ISSN 2410-700X № 1/2020
программ с использованием цифровых входов и выходов, может применяться в любых приложениях наряду с языком релейных диаграмм или вместо него. Но при реализации сложной задачи с применением специальных входов и функций программный код может разрастись, включив в себя большое число секций, и, таким образом, потерять свою наглядность.
Также при создании программы на языке FBD требуется предварительная проработка программы в виде четкого прописывания алгоритма работы перед тем, как начать писать код, так как потом будет достаточно сложно внести изменения
Рисунок 1 – Пример фрагмента программы на FBD в среде OWEN Logic
Язык SFС (Sequentiаl Funсtiоn ^ай) – расшифровывается как «Последовательность функциональных диаграмм», и является одним из языков стандарта МЭК 61131-3. SFC позволяет легко описывать последовательность протекания процессов в системе.
SFC позволяет легко описывать последовательность протекания процессов в системе.
SFC осуществляет последовательное управление процессом, базируясь на системе условий, передающих управления с одной операции на другую. Язык SFC состоит из конечного числа базовых элементов, которые используются как блоки для построения целостного алгоритма протекания программы.
Рисунок 2 – Пример фрагмента программы на SFС в среде СОDESYS
Описать операцию можно не только с помощью SFC, но и с помощью ST и Ш. Как только шаг выполнен, то идет действие по передачи управления следующему шагу. Переход между шагами может быть двух видов. Если на шаге выполнено какое – то условие и дальнейшим действием является переход на следующий шаг, значит – это условный переход. В случае же, если происходит полное выполнение всех условий на данном шаге и только потом осуществляется переход на следующий шаг, то-это безусловный переход. n List), ST (Strud:ured Text), LD (Ladder Diagram), FBD (Fundim ВЬск Diagram), SFС (Sequential Fundim СИах!)
n List), ST (Strud:ured Text), LD (Ladder Diagram), FBD (Fundim ВЬск Diagram), SFС (Sequential Fundim СИах!)
Siemens Simаtiс FBD, LD, STL(Statement List), ST, GRAPH 7, HiGraph 7, SFС
GE Еапис Ргойсу МасЫпе Edition (МЕ) QMPLrciTY МасЫпе Editrnn FBD, IL, LD
Таким образом, мы видим, что для написания программ для большинства наиболее часто используемых в промышленности логических контроллеров используются языки, регламентируемые стандартом МЭК 61131-3, а именно LD, FBD, ST, IL, SFC. Даже столь краткое представление МЭК языков показывает очевидную сложность полноценной реализации инструмента программирования, поддерживающего все пять языков ПЛК. Обычно небольшие фирмы-изготовители ПЛК реализуют несколько или один единственный язык. Во многом приоритет использования того или иного языка программирования зависит от исторически сложившихся традиций в отрасли или сферы применения. Список использованной литературы
Список использованной литературы
1. Максимычев, О.И. Программирование логических контроллеров (PLC): учеб. пособие / О.И. Максимычев, А.В. Либенко, В.А. Виноградов. – М.: МАДИ, 2016. – 188 с.
2. Минаев И. Г. и др. Программируемые логические контроллеры в автоматизированных системах управления / И. Г. Минаев, В. М. Шарапов, В. В. Самойленко, Д. Г. Ушкур. 2-е изд., перераб. и доп. -Ставрополь: АГРУС, 2010. – 128 с. ISBN 978-5-9596-0670-1
3. ГОСТ Р МЭК 61131-3-2016 Контроллеры программируемые. Часть 3. Языки программирования
© Черкасов А.С., 2020
УДК 004.432
Р. И. Шакиров,
студент ГУМРФ, г. Санкт-Петербург, РФ, E-mail: renatshk@gmail. com А. С. Татаурова, студентка ГУМРФ, г. Санкт-Петербург, РФ, E-mail: natia.tataurova@gmail .com
com А. С. Татаурова, студентка ГУМРФ, г. Санкт-Петербург, РФ, E-mail: natia.tataurova@gmail .com
АВТОМАТИЗАЦИЯ УЧЕБНОГО РАСПИСАНИЯ ЧЕРЕЗ TELEGRAM-BOT
Аннотация
Статья посвящена разработке бота Telegram, который решает проблему доступности расписания в образовательном учреждении. Проект был реализован с использованием Python и Heroku. В результате мы получали простой и в то же время полезный Telegram-bot.
Ключевые слова Telegram-bot, telegram, Python, Heroku, университет, расписание.
Программирование ПЛК на языках стандарта IEC 61131-3
| Актуальность | Приостановлено |
|---|---|
| Стоимость | 15000 руб |
| Продолжительность | 40 часов |
| Группа | от 8 до 10 человек |
| Начало занятий | По мере формирования группы |
Содержание программы
Тема 1. Программируемые логические контроллеры
Программируемые логические контроллеры
Определение и типы ПЛК. Общая организация и структура ПЛК. Анализ цикла работы ПЛК. Инструменты комплексов программирования ПЛК. Интеграция ПЛК в АСУТП.
Тема 2. Стандарт IEC 61131-3
Инструменты и состав комплекса программирования ПЛК, программная модель. Данные и переменные, стандартные функции, функциональные блоки. Языки программирования стандарта IEC 61131-3.
Тема 3. Система программирования OpenPCS
Общие сведения о системе программирования OpenPCS: проект, работа с проектом, браузер проекта. Редактор программных модулей (POU Editor). Отладка и тестирование программ. Имитатор ПЛК (SmartSim).
Тема 4. Сетевые технологии автоматизации
Локальные сети и их топология. Типы линий связи информационно-вычислитеных сетей, подключение линий связи и коды передачи информации. Эталонная модель взаимодействия открытых систем OSI (Open System Interconnection), аппаратура локальных сетей и стандартные сетевые протоколы. Методы управления обменом в локальные сетях. Интерфейсы и протоколы, применяемые в системах автоматики.
Методы управления обменом в локальные сетях. Интерфейсы и протоколы, применяемые в системах автоматики.
Тема 5. Программирование и конфигурирование контроллера ЭЛСИ-ТМ в OpenPCS
Технические характеристики, модули контроллера ЭЛСИ-ТМ. Общие принципы, структура программного обеспечения. Конфигурирование ПЛК, использование ElsyTMManager. Работа с ElsyTMPultPC.
Тема 6. Cерверная часть ПК InfinitySCADA
Понятие сигнала, дерева сигналов. Конфигуратор серверов. Организация взаимодействия с внешними системами по интерфейсам ОРС.
Тема 7. Сопряжение контроллеров с программным обеспечением верхнего уровня
ПК «InfinitySCADA»: коммуникационные модули. Конфигурирование коммуникационных модулей. Сопряжение контролера с сервером. Отображение получаемых данных.
Учебный план
|
Дисциплины и их содержание |
Количество часов |
|
1. |
4 |
|
Определение и типы ПЛК. Общая организация и структура ПЛК. Анализ цикла работы ПЛК. Инструменты комплексов программирования ПЛК. Интеграция ПЛК в АСУТП. |
|
|
2. Стандарт IEC 61131-3 |
4 |
|
Инструменты и состав комплекса программирования ПЛК, программная модель. Данные и переменные, стандартные функции, функциональные блоки. Языки программирования стандарта IEC 61131 |
|
|
3. Система программирования OpenPCS |
8 |
|
Общие сведения о системе программирования OpenPCS: проект, работа с проектом, браузер проекта. |
|
|
4. Сетевые технологии автоматизации |
4 |
|
Локальные сети и их топология. Типы линий связи информационно-вычислитеных сетей, подключение линий связи и коды передачи информации. Эталонная модель взаимодействия открытых систем OSI (Open System Interconnection), аппаратура локальных сетей и стандартные сетевые протоколы. Методы управления обменом в локальные сетях. Интерфейсы и протоколы, применяемые в системах автоматики. |
|
|
5. Программирование и конфигурирование контроллера ЭЛСИ-ТМ в OpenPCS |
10 |
|
Технические характеристики, модули контроллера ЭЛСИ-ТМ. |
|
|
6. Cерверная часть ПК InfinitySCADA |
4 |
|
Понятие сигнала, дерева сигналов. Конфигуратор серверов. Организация взаимодействия с внешними системами по интерфейсам ОРС. |
|
|
7. Сопряжение контроллеров с программным обеспечением верхнего уровня |
6 |
|
ПК «InfinitySCADA»: коммуникационные модули. Конфигурирование коммуникационных модулей. Сопряжение контролера с сервером. Отображение получаемых данных. |
|
|
ИТОГО |
40 |
 Программируемые логические контроллеры
Программируемые логические контроллеры Редактор программных модулей (POU Editor). Отладка и тестирование программ. Имитатор ПЛК (SmartSim).
Редактор программных модулей (POU Editor). Отладка и тестирование программ. Имитатор ПЛК (SmartSim). Общие принципы, структура программного обеспечения. Конфигурирование ПЛК, использование ElsyTMManager. Работа с ElsyTMPultPC.
Общие принципы, структура программного обеспечения. Конфигурирование ПЛК, использование ElsyTMManager. Работа с ElsyTMPultPC.
В результате освоения программы слушатель должен:
Знать:
– особенности разработки программного обеспечения на языках стандарта IEC 61131-3;
– архитектуру и организацию программируемых логических контроллеров;
– принципы построения промышленных сетей, их основные топологии, интерфейсы и протоколы, применяемые в системах автоматики.
Уметь:
– пользоваться средой программирования OpenPCS разработки прикладных программ для ПЛК;
– создавать конфигурацию ПЛК ЭЛСИ-ТМ в ElsyTMManager;
– разрабатывать прикладные программы для ПЛК на языках программирования стандарта IEC 61131-3;
– осуществлять организацию передачи данных с ПЛК на верхний уровень SCADA-системы используя промышленные протоколы.
Владеть:
– представлениями о тенденциях применения ПЛК в современных системах автоматизации;
– информацией об основных промышленных сетях и их назначении.
Форма обучения
Обучение производится в форме теоретических и практических занятий в компьютерном классе, состоящем из рабочих станций, объединенных в локальную вычислительную сеть. Компьютерный класс оснащен мультимедийным оборудованием (проектор, экран, акустическая система).
На компьютерах установлено лицензионное программное обеспечение (операционная система Windows 7, MS Office 2007, пакеты прикладных программ).
Контактная информация
Запись на курс
Технологические языки управления IEC-61131-1 – SCADA S3 Архитектура
Текущая реализация технологических языков стандарта IEC-61131-3 поддерживает языки ST (Structured Text) и FBD (Functional Block Diagram). Исходный код, реализованный на одном из вышеперечисленных языков, компилируется в платформенно-независимый код (TIC), который затем может быть передан на исполнение виртуальной машине VmLogix.
Виртуальная машина реального времени VmLogix оптимизирована для максимально эффективного выполнения платформенно-независимого кода (TIC). Реализованная на ANSI C, виртуальная машина может быть портирована на практически любые ОС и платформы (QNX,Linux,Windows,…). Благодаря оптимизации кода, а так же самой машины, удалось достичь, а в некоторых случаях и превзойти производительность промышленного стандарта Softlogic, программного продукта ISaGRAF.
В отличие от многих других SCADA, где Softlogic носит вспомогательную функцию и используется для изменения уставок, рецептов, некритического управления, в S3, с помощью текущей реализации технологических языков на целевой платформе QNX, можно реализовывать полноценные ПИД контуры управления, фильтровать и обрабатывать в реальном времени переменные процесса (PV), т.е. реализовывать смело функции самых совершенных ПЛК, причем делать это в единой интегрированной среде разработки с другими компонентами SCADA. Необходимые функциональные блоки имеются в стандартной библиотеке.
Уникальные свойства QNX позволяют строить надежные системы, используя , на первый взгляд очень необычные архитектуры, вольно распоряжаясь с переменными процесса в смысле замыкания контуров управления через полевые шины. Например, с точки зрения S3, нет ничего необычного, если взять PV по протоколу MODBUS из контроллера/УСО МИКРОЛ, отфильтровать, обработать в специализированном регуляторе и выдать управляющее воздействие в локальный ЦАП, установленный в слоте PCI или в стеке PC/104 QNX машины.
Такой подход дает необычную гибкость и существенную экономию средств, особенно в случае модернизации и масштабирования существующих систем, за счет максимального использования существующего оборудования.
При этом количество кабелей может оказаться меньше, а надежность системы выше, чем в случае, если бы контур управления был реализован на одной аппаратной платформе.
В состав S3 входит удобный редактор FBD программ. Редактор позволяет создавать свои функциональные блоки на базе существующих. Имеет интегрированный отладчик:
Редактор FBD. увеличить
Начиная с версии 1.1 в состав S3 включен редактор SFC программ. SFC это графический язык последовательных функциональных схем (Sequential Function Chart). Язык SFC предназначен для использования на этапе проектирования ПО и позволяет описать “скелет” программы – логику ее работы на уровне последовательных шагов и условных переходов.
Редактор SFC. увеличить
Ну и конечно, кроме языков визуального программирования стандарта IEC-61131, S3 поддерживает алгоритмический язык ST, описанный этим же стандартом.
Редактор ST. увеличить
Редактор ST имеет все элементы, присущие современным IDE, такие как автоматическое форматирование, цветовое кодирование кода, автоматическое завершение ввода, онлайн помощь. На языке ST, при необходимости, можно реализовывать свои библиотечные функциональные блоки, а так же добавлять функциональность в HMI проекты с помощью скриптов.
В редакторе ST все под рукой. Нажав CTRL-Пробел, в любой момент можно получить список доступных тегов (переменных), функций, ключевых слов, начинающиеся с ранее введенных символов.
Программирование ПЛК ОВЕН. Языки МЭК 61131-3. Среда CoDeSys. Гайнутдинов К. Видеокурс. 2013
Установка CoDeSys и target файлов
Установка CoDeSys и target файлов
Дискретные входы и выходы, связь с ПЛК
Дискретные входы и выходы, связь с ПЛК
Режим эмуляции ПЛК в CoDeSys
Режим эмуляции ПЛК в CoDeSys
Логические операторы И, ИЛИ, НЕ
Логические операторы И, ИЛИ, НЕ
Визуализация в среде CoDeSys
Визуализация в среде CoDeSys
Язык LD релейная логика Ladder Diagram
Язык релейных диаграмм LD Ladder Diagram
Переменные и типы данных
Переменные и типы данных
Аналоговые входы и выходы
Аналоговые входы и выходы
Арифметические операторы
Арифметические операторы
Операторы сравнения БОЛЬШЕ, МЕНЬШЕ
Операторы сравнения БОЛЬШЕ, МЕНЬШЕ
Операторы выбора MIN, MAX
Операторы выбора MIN, MAX
Командный вход для управления
Командный вход для управления
Проект в CoDeSys. Цикл работы ПЛК
Проект в CoDeSys. Цикл работы ПЛК
Пример: термодатчик и нагреватель
Пример: термодатчик и нагреватель на ПЛК73
Язык ST Структурированный текст
Язык ST Структурированный текст
Изменение target файла в проекте
Изменение target файла в проекте
Подключение модуля ввода
Подключение модуля ввода
Standart.lib. Фронты сигналов и отладка
Standart.lib. Фронты сигналов и отладка
Standart.lib. RS и SR триггеры
Standart.lib. RS и SR триггеры
Standart.lib. Счетчики импульсов
Standart.lib. Счетчики импульсов
Standart.lib. Таймеры. Тип данных TIME
Standart.lib. Таймеры. Тип данных TIME
Программирование в среде OWEN Logic
Программирование в среде OWEN Logic
Подключение библиотеки Util.lib
Подключение библиотеки Util.lib
Util.lib. Использование ПИД алгоритма
Util.lib. Использование ПИД алгоритма
Операторы преобразования типов
Операторы преобразования типов
Комплексный финальный пример
Комплексный финальный пример
Описание курса: Возможности среды разработки CoDeSys. Языки программирования контроллеров. Операторы. Типы данных. Стандартные библиотеки.
Языки МЭК (языки программирования контроллеров) — Студопедия
Стандартом МЭК предусмотрено 5 языков программирования ПЛК:IL, LD, FBD, ST, SFC. При разработке проекта пользователь может выбратьлюбой из языков для написания конкретного программного модуля (POU).В рамках одного проекта могут присутствовать программные модули, написанные на разных языках. В CoDeSys поддержаны все 5 языков, а также один
дополнительный:
• IL (Instruction List) – Список инструкций – язык программирования, напоминающий ассемблер Siemens STEP7. Все операции производятся через ячейку памяти, «аккумулятор», в который программа записывает результаты произведенных действий.
• LD (Ladder Diagram) – Релейные диаграммы – графический язык программирования, использующий принципы построения электрических схем. С помощью элементов «контакт» и «катушка» пользователь собирает схему прохождения сигнала. Язык удобен для реализации логических алгоритмов работы с дискретными сигналами.
• FBD (Functional Block Diagram) -Диаграмма а функциональных блоков – графический язык
программирования. Все действия и операторы, используемые в данном языке, представляются в виде функциональных блоков (ФБ). ФБ имеют входы и выходы определенных типов, которые могут быть связаны между собой.Помимо стандартных ФБ пользователь может вставлять в алгоритм собственные POU, созданные в рамках данного проекта или реализованные в подключенных к проекту библиотеках.В CoDeSys реализован улучшенный язык программирования с помощью функциональных блоков, получивший обозначение CFC.
• ST (Structured Text) – Структурный текст – текстовый язык программирования, схожий с языком высокого уровня (С, Pascal). Язык ST удобен для реализации сложных вычислений, циклов и условий, для работы с аналоговыми сигналами.
• SFC (Sequentional Functional Chart) – Последовательные функциональные схемы – графический язык, приспособленный для создания последовательности этапов алгоритма работы.Каждый этап реализуется на любом удобном для пользователя языке.Язык удобен для создания алгоритмов управления сложными процессами, имеющими несколько ступеней, написания моделей автоматов.
3.2.1. Реализация языков программирования стандарта мэк 6-1131/3 в системе trace mode
В программном пакете TRACE MODE 6 предоставляется широкий набор средств программирования задач АСУТП и бизнес-приложений (АСУП), ориентированный на специалистов разной квалификации и профессиональной подготовки. В систему TRACE MODE 6 включены 5 языков программирования – Techno SFC, Techno LD, Techno FBD, Techno ST, и Techno IL. Данные языки являются расширением языков SFC (Sequential Function Chart), LD (Ladder Diagram), FBD (Function Block Diagram), ST (Structured Text) и IL (Instruction List) международного стандарта МЭК 6-1131/3. Данный стандарт разрабатывается с 1993 года Международной Электротехнической Комиссией (International Electrotechnical Commission) и давно признан как в Европе и в США, так и во всем мире ведущими производителями средств автоматизации. Языки программирования TRACE MODE 6 стандарта МЭК 6-1131/3 включают в себя 3 визуальных языка (FBD, SFC, LD), ориентированных на инженеров и бизнес-аналитиков и 2 текстовых (ST, IL), ориентированных на программистов. С помощью языков IEC 61131-3 TRACE MODE 6 одинаково комфортно программируются и контроллеры, и алгоритмы человеко-машинного интерфейса (HMI). Языки МЭК 6-1131/3 TRACE MODE 6 сочетают в себе достаточную функциональность, простоту и предохраняют пользователя TRACE MODE 6 от большинства ошибок, которые нередко возникают при использовании обычных языков программирования. Реализация МЭК 6-1131/3 в интегрированной системе TRACE MODE 6 не только полностью удовлетворяет требованиям стандарта, но и предоставляет пользователю дополнительный сервис в виде расширенного набора библиотек функциональных блоков, реализующих типовые алгоритмы управления. Для всех 5 языков существует единый механизм связи с базой данных реального времени TRACE MODE 6. Каждая программа обладает набором аргументов, исходные данные передаются в программу через входные аргументы, а результаты вычислений возвращаются в выходных аргументах. Аргументы связываются с атрибутами каналов TRACE MODE 6, т.е. с реальными входами и выходами контроллеров и УСО, ячейками корпоративных баз данных, либо с внутренними переменными. Таким образом, одна и та же программа может вызываться несколько раз за цикл для обработки разных потоков данных. Программирование и отладка программ на языках МЭК 6-1131/3 в TRACE MODE 6 производится в интегрированной среде разработки, включающей в себя несколько различных редакторов. Программы на языках Techno FBD, Techno LD и Techno SFC создаются и отлаживаются в специальных визуальных редакторах, а Techno ST и Techno IL представляют собой более традиционные языки, программирование на которых осуществляется в текстовом редакторе. Несмотря на различия, программы на разных языках стандарта МЭК 6-1131/3 в TRACE MODE 6 могут взаимодействовать между собой. Например, программа на Techno FBD может вызывать функциональный блок, написанный на языке Techno ST, а внутри этого блока может вызываться подпрограмма на Techno LD и т.
Mack the Dog Early Language Development 2 в App Store
Я частный репетитор начальных классов. Пытаясь найти дополнительные приложения, которые помогли бы одному из моих второклассников, я наткнулся на Mack the Dog и купил его. Что 99 центов. Я пожалел, что никогда не купил его, потому что мои 99 центов были потрачены впустую, и вот почему:
Рассказ для 2-го класса, что касается слов, но макет затрудняет чтение. И в упражнениях НИКОГДА не используется текст, а это необходимо для поддержания и / или измерения любого уровня понимания.Проблема в том, что занятия проводятся на уровне детского сада, а не на уровне первого или второго класса.
Чтобы сделать это приложение экспоненциально хуже, оно основано на австралийской / английской (Великобритания) номенклатуре: раковина становится краном, плита становится горячей плитой, детская коляска становится детской коляской, мусорный бак становится мусорным ведром и т. Д. Это полностью сбило с толку моего ученика.
Две дополнительные проблемы: Когда в одном конкретном задании моего ученика просили идентифицировать определенные предметы на картинке, это не давало ему возможности идентифицировать эти предметы.Его голос не делал этого, и он не мог печатать слова. Итак, я понятия не имею, как он вообще должен был что-то идентифицировать. Никаких инструкций не было.
Наконец, когда просили прикоснуться к определенным элементам на фотографиях, было больше вариантов, чем тот, который в конечном итоге оказался правильным. Пример: Когда вас попросили идентифицировать что-то с ручкой, правильным ответом была дверь шкафа. Но на той же фотографии была плита с ручкой и раковина с ручками. Так откуда моему ученику было знать, что печь будет неправильной.Если вы собираетесь попросить учащихся назвать конкретные вещи, то вам нужно убедиться, что на картинке нет других элементов, которые могут или будут смутить учащегося.
Короче говоря, весь этот обзор состоит в следующем: до тех пор, пока разработчик не сделает это профессиональное, работоспособное и обучаемое приложение, я не могу рекомендовать его использование ни по какой причине.
Розыгрышкниг – 4 победителя – Кейт и Мак и Вавилонская башня # MegaChristmas20
В это Рождество обязательно подарите своим малышам любовь к чтению и обучению.Одна из любимых библейских историй моего сына была о Вавилонской башне. У него действительно был друг-миссионер по переписке в течение многих лет. Он знал, как важно делиться любовью Бога со всеми в мире.
Мелисса Паредес написала книги, задания и ресурсы на тему Кейт и Мак, чтобы познакомить детей с различными языками и культурами по всему миру и помочь им понять, насколько важно нести Слово Бога каждому на языке, который они понимают. .
О Кейт и Мак и Вавилонской башне:
Присоединяйтесь к Кейт и ее лучшему другу Маку в их приключениях, когда они узнают о разных языках, людях и культурах – обо всем, от библейских времен до сегодняшнего мира! Путешествуя, Кейт и Мак рассказывают об удивительной любви к ним Бога.Потому что независимо от того, где люди живут и на каком языке говорят, им всем необходимо знать это самостоятельно.
В этом приключении отправляйтесь вместе с Кейт, Мак и новыми друзьями в библейские времена. Там они узнают, когда впервые появились языки!
Но веселье не должно заканчиваться одной книгой. Теперь вы можете загрузить интерактивные уроки и занятия для своих детей, посетив сайт wycliffe.org/kids. Вы также можете подписаться на рассылку писем о новых занятиях и узнавать о последних поездках Кейт и Мэк.
Не пропустите распродажу!
В настоящее время идет большая распродажа – вы можете получить книгу за 4 доллара до Киберпонедельника в этом году, и вырученные средства пойдут на пользу некоммерческой организации Уиклифа, помогающей переводить Библию на языки меньшинств по всему миру. Книги – отличные рождественские подарки!
ВОЙДИТЕ, ЧТОБЫ ВЫИГРАТЬ!
4 счастливчика получат книгу «Кейт и Мак и Вавилонская башня».
Розыгрыш открыт в США / Канаде для лиц старше 18 лет
Розыгрыш заканчивается 26.11 в 1159п по оценкам
Не забывайте возвращаться ежедневно, чтобы получить больше шансов на победу!
Розыгрыш лотереи
Натан Мак | Прием в бакалавриат USC
M.Эд. Управление высшего образования
Государственный университет Пенсильвании
Я закончил Канзасский университет и много лет работал в колледже, в том числе в (до USC) Университете Франклина в Швейцарии. Мне очень нравится работа, которую я могу делать, поскольку я помогаю студентам подумать о высшем образовании и найти для них наиболее подходящий колледж или университет. Мои любимые занятия – изучение иностранных языков и путешествия, особенно за границу! Я люблю исследовать и наслаждаться грандиозным приключением, которым является жизнь.Когда я не в нашем красивом кампусе, я читаю хорошую книгу, планирую свой следующий отпуск или собираюсь в поход!
Почему USC?
Что меня больше всего впечатляет в USC, так это то, что в учебном заведении действительно есть все – безумное разнообразие впечатляющих академических программ, гибкость учебных программ, великолепный кампус, школьный дух, яркое городское расположение, успешные выпускники, заинтересованные студенты и многое другое! Я искренне верю, что это уникальное сочетание функций не имеет себе равных в мире, и держу пари, что почти каждый может найти здесь дом.
Консультация при поступлении:
Расскажите нам свою уникальную и индивидуальную историю – и если вы не думаете, что у вас есть такая история, я обещаю вам, что вы это сделаете. Если вы застряли, посоветуйтесь с друзьями, учителями, родителями, психологами. Не говорите мне, что, по вашему мнению, я хочу услышать, потому что я, вероятно, видел это раньше, и это не поможет вам выделиться. Будьте уверены в себе и своей истории и с энтузиазмом передайте ее нам. Эти мелочи могут иметь огромное значение!
Фильм: Реальная любовь
Любимая закуска: Тайский лайм Трейдера Джо и кешью чили
Место, где вы больше всего довольны: У бассейна или на пляже
Работа мечты: Я хочу быть следующим Риком Стивом
Цитата: «Мир – это книга, и те, кто не путешествует, читают только одну страницу.»–Святой Августин
Расширение прав и возможностей предпринимателей: интервью с Элизабет Мак
Неизлечимая франкофила, Элизабет необычайно увлечена изучением языков, особенно способностью языков связывать людей. Она имеет диплом Supérieur по французскому бизнесу и работала в сфере исследований для Chambre de Commerce в Гренобле, Франция, и в качестве координатора по маркетингу в L’Oréal, Париж. В 2007 году она получила степень магистра 18 в. Французская литература из Техасского университета, а затем пять лет проработала профессором французского языка в Техасском государственном университете до 2012 года, когда она ушла, чтобы сформировать Центр фристайла.Через Freestyle Language Center она стремится создать настоящее языковое сообщество с забавной, свободной от стресса моделью и эффективной методологией, где использование языка в соответствующем контексте является ключевым.
Что вдохновило вас начать свой бизнес / начать поддержку Whole Planet Foundation?
В Freestyle Language Center у нас есть вдохновленная Нельсоном Манделой миссия по соединению людей с помощью языка, воплощенная в жизнь его знаменитой цитатой «говори с человеком на языке, который он понимает, и это идет ему в голову; говорите с ним на его родном языке, и это проникает в его сердце.Выучив африкаанс, язык угнетателя, за 27 лет тюремного заключения Мандела смог разрушить преграды и благодаря своему замечательному путешествию сделать мир лучше и более взаимосвязанным. Мы просто чувствуем вдохновение отдавать, делать больше.
Хотя мы всегда находили местную некоммерческую организацию для поддержки каждой сессии в течение последних 7 лет, ни одна из них не была так тесно связана с нашей миссией или лично не тронула мое сердце, как Фонд Whole Planet. Как женщина-предприниматель, любопытная и жаждущая сделать больше в мировом сообществе, я посетила первый «Момент миссии» Фонда Whole Planet, где я узнала, что средняя микрокредитная ссуда составляет 178 долларов.Осознание того, насколько легко может быть реальное и продолжительное влияние, заставило нас захотеть начать правильный путь!
Как вы продвинулись от истории происхождения до того места, где вы находитесь сейчас?
Я думаю, что для многих предпринимателей возникает ясность в отношении «проблемы», которую мы пытаемся решить, той проблемы, которая в первую очередь вдохновила на начало бизнеса. И упорство, много упорства (не говоря уже о правильных возможностях финансирования и бизнес-модели).
Несмотря на множество проблем, я слежу за тем фактом, что наша модель изучения языка теперь доказала свою эффективность, и мы решаем ту проблему, которую я намеревался решить: что традиционная академическая модель изучения языка по существу несовершенна, и что большая часть молодые люди, окончившие школы или университеты, фактически не могут говорить на «изучаемом» языке (за исключением тех, кто учился за границей…).Знание того, что наши ученики (взрослые ученики), которые начинают как совершенные новички, в конечном итоге получают возможность вести расширенный, содержательный разговор на своем «целевом» языке, поскольку они одновременно отражают такую прекрасную благодарность модели и сообществу – все это заставляет нас двигаться вперед!
Точно так же меня бесконечно вдохновляют (и в равной степени разочаровывают…) несколько фактов о нашем дефиците в изучении национального языка и нашей почти, но не полностью безнадежной одноязычной американской культуре. Тот факт, что 1% американцев говорят на другом языке, который они изучали в школе (т.е., не считая носителей испанского языка и т. д.) должно волновать нас на глобальном уровне, и я бы хотел, чтобы это было не в порядке не только с нашей системой образования, но и с нашим коллективным мышлением. Я считаю, что идея о том, что «нам не нужно» говорить на другом языке, экономически наивна и геополитически опасна. Не говоря уже обо всем остальном: умственных и неврологических преимуществах, многочисленных улучшениях в опыте путешествий, способности культурно расширять наш кругозор и, что наиболее важно, возможности сделать мир меньше за счет установления более глубоких связей с людьми.
Расскажите, что вы чувствовали, когда испытали неудачу, и как вы ее преодолели.
Какой? Кажется, что неудачи продолжаются; вопрос лишь в том, как справиться с каждым новым препятствием, укрепить себя, проявить творческий подход и четко выполнять миссию и проявлять любовь к ней.
Но я бы сказал, что самой большой была тройка, идеальный шторм разрыва первоначального партнерства по созданию Freestyle Language Center 7 лет назад, когда мы потеряли наши арендные площади и взяли на себя финансовые препятствия для разработки нашей учебной программы, которые, как я знал, быть новатором, отворачиваться от старых школьных учебников – и не имея сбережений, не имея возможности получить ссуду (длинная история!).Оставив постоянную должность в университете в качестве матери-одиночки, чтобы начать «Фристайл», приключение на 100%, я могу сказать, что потребность в финансировании и другой предпринимательской поддержке, особенно для женщин, реальна!
К счастью, с учетом миссии, правильные ответы стали очевидными, в том числе проведенная нами краудфандинговая кампания, которая собрала начальные 10 тысяч долларов на разработку учебной программы (я не знал, что для этого потребуется гораздо больше в течение еще нескольких лет …!) финансирование поставило нас – и наших студентов – на путь к успеху благодаря нашей собственной учебной программе и методологии.
Что делает каждый день возможностью изменить к лучшему себя и микропредпринимателей по всему миру?
Две мои дочери. Я благодарен за способность подавать пример, пытаясь вести хороший бой. На каком-то уровне знать, что мы или они нуждаемся в микрозайме, и иметь возможность помочь предоставить микрозайм любой женщине в мире, в одиночку или с семьей, – это такой прекрасный способ чтобы изменить ситуацию. Я благодарен за любой способ, которым мы можем помочь другим, будь то расширение прав и возможностей женщин в нашем сообществе или за его пределами.
Я очень горжусь теми изменениями, которые мои девочки уже вносят в мир, учитывая их взрослую жизнь: одна, чьи исследования (в интересах лемуров и вырубки лесов на Мадагаскаре!) Заслужили университетские награды за свои впечатляющие результаты, другая – в настоящее время учится и полон решимости изменить ситуацию к бездомности и устойчивости… хотя мое сердце полно гордости, я верю, что все это происходит, и что родители несут ответственность за то, чтобы вести в этом направлении вверх от имени всех.
Какая часть разработанной вами программы / проекта / продукта является наиболее эффективной?
Online, где мир собирается учиться! С нашим новым исключительно онлайн-курсом испанского мы переработали нашу личную модель на подход «перевернутый класс», который предлагает не только личное еженедельное общение в виртуальном классе, но и еженедельные интерактивные материалы в рамках нашей собственной учебной программы. В нашей методике используются аутентичные материалы с богатым культурным наследием (например, теленовеллы), что делает ее очень увлекательной, эффективной и, самое главное, способной выйти за пределы нашего «основного» сообщества – победа, победа, победа.
Чтобы представить эти усилия в перспективе, за 7 лет нашего существования мы создали более 40 курсов на испанском, французском и итальянском языках, однако разработка этого онлайн-курса заняла у нас 1 год. Усилия по разработке демонстрируют свою эффективность в том, что может быть сложной педагогической моделью (онлайн).
Тот факт, что этот курс развил у студентов разговорные навыки всего за 6 недель, при участии в динамичном онлайн-сообществе (истинная часть, которой мы отказались жертвовать при разработке: сообщество!), Мы рады этой способности достичь пути за пределами нашего текущего местоположения в центре Остина.Хотя наша личная модель представляет собой бьющееся сердце сообщества Freestyle Language Center, теперь у нас есть охват. И, как сказано в части нашего «Манифеста фристайла», мы знаем, что у нас есть потенциал для объединения, выходящего за пределы сообщества Остина: соединять и использовать язык как средство для расширения нашего охвата и нашего межкультурного понимания.
Какая у вас 5-летняя мечта?
Наш местный и доморощенный Остин, Техас (в настоящее время 801 Рио-Гранде, то же здание, где Джон Макки начал свою карьеру…).!) всегда будет ядром нашего сообщества. Это место, где люди собираются вместе, чтобы бросить вызов своим границам, установить связь с другими через язык, создать культурную осведомленность и личностный и профессиональный рост, став двуязычными / многоязычными. Эта энергия одновременно побуждает нас сохранять намерение сделать это нашим «ядром», одновременно желая сделать успешную модель Freestyle Language Center более доступной (см. Последний вопрос 🙂
В течение 5 лет мы стремимся к глобальному охвату с помощью нашего нового виртуального класса, онлайн-курсов – и стать ведущей языковой моделью с помощью нашей программы «Спутник» центра Freestyle Language Center, в рамках которой мы используем нашу модель, в настоящее время работающую в технологическом бизнесе в центре Остина, кроме того, с нашим личным подходом.
С этой целью у нас есть новая стратегическая команда для этого следующего этапа роста, чтобы создать правильные команды, подготовиться к раунду финансирования и сделать это возможным. Это супер захватывающе!
Что вы посоветуете начинающим предпринимателям, которые хотят включить дело в свою бизнес-стратегию?
Знайте, что никакая сумма в долларах или стратегия не являются слишком маленькими. Начните с малого, начните с того места, где вы находитесь, просто сделайте что-нибудь, чтобы вернуть. Чего все это стоит, если мы не делаем добрых дел в мире помимо нашей непосредственной миссии.Если центр Freestyle Language Center может внести свой вклад в мир микрокредитования, поддержать женщин-предпринимателей по всему миру, просто делая кофе и прося пожертвования, устраивая небольшие розыгрыши и т. Д., Я хотел бы верить, что каждый человек и организация могут найти причину и начать с малого. Просто начни.
Curtis Mack, MD
Доктор Мак является сертифицированным специалистом по радиационной онкологии Американским советом по радиологии. Кроме того, он сертифицирован для проведения лучевой терапии с модулированной интенсивностью (IMRT) и имплантации семян простаты по протоколам RTOG / NRG.Он также имеет большой опыт в установке SpaceOar для уменьшения дозы облучения прямой кишки во время проведения лечения с помощью IMRT, Seed implant и SBRT, имея дело с сотнями случаев.
Доктор Мак выполнил ротации в онкологической гинекологии и раке головы и шеи в онкологическом центре доктора медицины Андерсона в Хьюстоне. После прохождения резидентуры он продолжил частную практику, уделяя особое внимание лечению рака простаты, рака головы и шеи и рака груди, используя постоянно меняющиеся технологии радиационной онкологии.Доктор Мак прошел обучение стереотаксической лучевой терапии тела (SBRT / SABR) при раке легких с использованием своего нового современного оборудования. Он также выполняет IMRT всего мозга с сохранением гиппокампа, что потенциально может уменьшить долгосрочные побочные эффекты.
Он участвует в постоянном совершенствовании практики при участии национального комитета по радиационным технологиям и активно участвует в исследованиях сети онкологов США. Он также был главным исследователем в исследовании с участием пациентов с раком простаты.
Доктор Мак получил стипендию Американского общества терапевтической радиологии и онкологии и стипендию радиологического общества Североамериканских исследований и образования для финансирования специального исследовательского года, в течение которого он исследовал механизмы того, как рак простаты поражает человеческое тело. Ежегодно с 2010 года доктор Мак избирается своими коллегами одним из лучших врачей Америки. Он входит в состав редакционного совета журнала CURE Magazine , отмеченного национальными наградами издания для больных раком и выживших.
Чтобы просмотреть видео о раке простаты с участием доктора Мака, щелкните здесь.
Загрузить буклет «Общие сведения о вариантах рака простаты».Загрузить буклет PDF
Узнайте больше о вариантах лечения рака простаты на веб-странице Американского общества брахитерапии.
Узнать больше о SpaceOAR Hydrogel
Доктор Мак принимал активное участие в правлении Handi-Dogs, некоммерческой организации, занимающейся дрессировкой служебных и терапевтических собак для пожилых людей и людей с ограниченными возможностями.Он сам пережил рак после борьбы с острым лейкозом с помощью химиотерапии, облучения всего тела и трансплантации костного мозга. Сейчас он находится в прекрасном состоянии после полного выздоровления и ценит идеи, которые он получил «по ту сторону стетоскопа». Ему нравится кроссфит, бег, кемпинг, фотография и чтение, а его веймаранеры почти всегда рядом.
Mack | World of Cars Wiki
- «Я мастер маскировки».
- – Mack , Cars 3
Mack (известный как Mack Hauler в некоторых выпусках товаров) – транспортер Молнии МакКуина и один из его самых давних друзей.Мак и МакКуин работают в команде Rust-eze в гонках Piston Cup Racing Series, а Мак приглашает Маккуина на все свои гонки. Мак стал перевозчиком Молнии после того, как порекомендовал МакКуина Расти и Дасти Раст-эз, когда они искали новый представительский автомобиль.
История
Фон
Мак приближается к Маккуину у автодрома Симптаун.
До того, как стать гонщиком, Мак работал перевозчиком продуктов Rust-eze по пересеченной местности.В свободное время Мак с удовольствием смотрел гонки, а его любимой машиной был гонщик Smell Swell Молния Маккуин. Когда Мак стал свидетелем отказа Маккуина от спонсора в пользу Сэмми Смелтера, Мак предложил Раст-эза, который искал новый репортер, но не добился успеха на своих предыдущих прослушиваниях.
Мак предложил привезти Маккуина в Бостон, чтобы обсудить возможность спонсора. Стремясь получить новое спонсорство, Маккуин согласился, и они стали верными друзьями во время путешествия туда.Встретив Расти и Дасти Раст-эз, МакКуин обнаружил, что Ржавчина была несколько неловкой отметкой, из-за чего он поначалу не решался принять эту работу. Однако Маккуин согласился принять их предложение до тех пор, пока Мак сможет стать его перевозчиком. Мак и Маккуин оставались друзьями на протяжении всего восхождения Маккуина к славе Piston Cup.
Легковые автомобилиМак сообщает МакКуину, что его трейлер припаркован в спонсорской палатке.
В Cars , когда Маккуин направляется в Мак после Dinoco 400 на автодроме Юга, он обнаруживает, что Мак припарковал свой трейлер позади палатки своего спонсора, чтобы Маккуин мог легко выйти после делая личный внешний вид.Тем не менее, Маккуин ненавидит появляться перед ржавыми машинами и отчаянно пытается прокрасться через палатку, прячась за картонным вырезом, хотя доска падает, и ржавые машины теснят его.
Boost и Wingo толкают Мака вперед и назад.
Покинув автодром, Мак и МакКуин целый день едут на международную автодром Лос-Анджелеса, где будет проходить гонка на тай-брейк. Из-за пари, которое Маккуин заключил с Чиком, он велит Маку проехать ночь.Хотя Мак нервничает из-за задачи, МакКуин уверяет его, что он не будет спать с ним, хотя вскоре засыпает, оставив Мака одного и сонного на шоссе. DJ, Boost, Сопли Род и Уинго возятся с Маком, когда он задремал, в результате чего трофей внутри трейлера упал, выпустив Маккуина из заднего выхода. Молния просыпается посреди шоссе и в панике пытается выяснить, что произошло. Быстро соображая, Маккуин пытается найти Мака, но не может найти его из-за множества самосвалов, которые выглядят так же, как он.Заметив выезд грузовика, Маккуин бросается к нему, едва избегая встречного поезда. Когда Маккуин наконец догоняет грузовик, он обнаруживает, что это на самом деле не Мак, а раздраженный Питербилт по имени Джерри Восстановленные Батареи.
Все знают об исчезновении Маккуина.
По прибытии на автостраду Мак открывает свой трейлер, чтобы показать Маккуина толпящейся прессе, но все сбиты с толку, когда понимают, что Маккуин отсутствует.Тем временем Молния Маккуин оказывается в маленьком городке Радиатор-Спрингс, где его приговаривают к общественным работам и не могут уехать.
Через несколько дней после исчезновения Маккуина прессе позвонил Док Хадсон по поводу местонахождения Маккуина, и Мак вместе с сотнями других репортеров и машин с телекамерами пришли забрать Лайтнинг. Маккуин, хотя и счастлив воссоединиться с Маком, не решается оставить новых друзей, которых он приобрел. Тем не менее, Маккуина отправляют на международную автодром Лос-Анджелеса, где он начинает готовиться к решающей гонке, а Мак является единственным членом его пит-бригады.Однако, пока Лайтнинг делает тренировочные круги, появляются его друзья из Радиатор-Спрингс и присоединяются к Маку в команде Маккуина.
Ржавые друзья Маккуина.
После того, как Лайтнинг помогает Стрипу Уэзерсу дойти до финиша в спортивном акте, Tex Dinoco предлагает Маккуину спонсорство Dinoco. Маккуин отказывается, вместо этого желая остаться с Маком и другими друзьями, которых он приобрел благодаря спонсорству Rust-eze.
Во время титров фильма Мак и многие другие жители Радиатор-Спрингс и его окрестностей идут в кинотеатр Радиатор-Спрингс, где они смотрят фильм Monster Trucks, Inc., История игрушечных машин и Жизнь жука . Выслушав Yeti, Hamm Centercut и P.T. Фли говорят в своих фильмах, он их критикует за повторы. Это отсылка к тому, как Mack, Hamm, Yeti и P.T. Фли все исполнены Джоном Ратценбергером.
Cars: The Video Game Тачки: ВидеоигрыВ Cars: The Video Game сезон 2006 Piston Cup скоро начнется, поэтому Мак велит Маккуину попрактиковаться, участвуя в дорожных гонках и помогая своим друзьям по городу.Мак переносит Маккуина на все пять гонок сезона, каждый раз приветствуя Маккуина с позитивным настроем.
Мак возле кафе Flo’s V8.
Перед четвертой гонкой Piston Cup на трассе Smasherville Speedway Мак едет по межштатной автомагистрали 40, а Маккуин тренируется по городу. Boost, DJ, Wingo и Snot Rod работают вместе, чтобы совершить ограбление, и им удается убежать с Lightning’s Gear, усыпив Мака, открыв его трейлер и собрав товары.Как только они начинают убегать, Соплиный Род чихает, пробуждая Мака вовремя, чтобы понять, что произошло. Он звонит шерифу в Радиатор-Спрингс, который сообщает о проблеме Маккуину. В поисках мести Маккуин мчится на межштатную автомагистраль, где догоняет преступников и крадет свое снаряжение. Все четверо арестованы и доставлены в муниципальный изолятор Радиатор-Спрингс, где, как они признают, были наняты Чиком Хиксом.
В мире хабов, Мак остается припаркованным возле кафе V8 Фло, приветствуя Маккуина, когда тот проходит мимо.
Cars: Radiator Springs AdventuresMack in Cars: Radiator Springs Adventures .
В Cars: Radiator Springs Adventures Мак появляется во время въезда и выезда в качестве одного из персонажей, для которых игрок должен расчистить путь.
Материя и призрачный светВ Mater и Ghostlight , Mack появляется в кафе V8 Flo со всеми другими горожанами, слушая, как шериф рассказывает историю Ghostlight.После того, как история закончилась, он помогает остальным разыграть Mater, поставив лампа на его буксирном крюке.
Cars: Матер-национальный чемпионатХотя Мак не появляется в Cars: Mater-National Championship , некоторые данные, найденные в файлах игры, позволяют предположить, что Мак должен был появиться.
Мир автомобилей ИнтернетMack в The World of Cars Online .
В The World of Cars Online Мака можно было найти возле кафе V8 Фло, приветствуя клиентов.
Тачки: Race-O-RamaМак в Mack Track Challenge в Cars: Race-O-Rama
Мак не играет большой роли в Cars: Race-O-Rama . Он появляется в Mack Track Challenge, где игрок должен использовать свой трейлер, чтобы совершить большой прыжок. В основном в игре он является транспортером, который помогает игроку добраться до разных мест в игре.
Легковые автомобили 2Мак, Луиджи, Гвидо и Салли в Cars 2 .
В Cars 2 Мак все еще работает с Piston Cup, продолжая свою работу в качестве перевозчика команды Лайтнинг. Его ненадолго можно увидеть в начале, когда Молния возвращается в Радиатор-Спрингс. Он не сопровождает его на Мировой Гран-при, а предпочитает остаться в Радиатор-Спрингс. Ближе к концу фильма Мак делает замечание Лиззи о том, что Мэтр и Холли Шифтуэлл «идеально подходят друг другу».
Легковые автомобили 3Мак возвращается на автомобиле Cars 3 , на котором он перевозит Маккуина на гонки Piston Cup 2016 и 2017 годов.Они путешествуют по разным местам, включая большой горный хребет, небольшой мост, пересекающий ручей, и автомобильный мост.
Тачки 3: На пути к победеМак – разблокируемый игровой персонаж в Cars 3: Driven to Win , дебютировавший в игре Cars . Его можно разблокировать, собрав 10 шляп Mack, которые разбросаны по карте Thomasville Playground.
Cars Land
Мак появляется на аттракционе Cars Land, Radiator Springs Racers, когда гонщики входят в темный туннель.После того, как всадники слышат, как Минни говорит: «Ван, мы снова заблудились?», Всадники объезжают Мака, Минни и Вана.
Общая информация
Физические характеристики
Рекламное произведение Мака.
Mack основан на полуприцепе Mack Super-Liner 1980-х годов с совместимым прицепом. Его номерной знак RUSTEZ3. На других фотографиях указано, что его номерной знак тоже RUSTEZ4.
Кабина Мака окрашена в красный цвет и имеет серую решетку радиатора с его именем.Трейлер, который он возит, красно-серый, с изображением Молнии МакКуина, логотипом Rust-eze, номером 95 и именем Молнии на каждой стороне. У него хромированные диски.
Личность и качества
Мак – единственный член бригады ямы Маккуина.
Мак невероятно предан своим друзьям, особенно Маккуину. Как перевозчик Lightning, Мак делает все возможное, чтобы удовлетворить потребности гоночного автомобиля, хотя их желания не всегда совпадают. Мак поддерживает Лайтнинг в трудные времена, например, когда у Лайтнинг не было пит-бригады на тай-брейке в Лос-Анджелесе, и Мак выступал, пока не появились Хадсон и другие друзья Маккуина.
Мак положительно относится к своей работе, и он всегда стремится доставить Маккуина на следующую гонку. Кажется, ему нравятся дальние поездки, особенно когда он может слушать музыку. Однако музыка может отвлекать Мака, и ему часто трудно бодрствовать, когда он ведёт машину поздно ночью.
Мак корчит рожи своему отражению.
Кроме того, Мак иногда может вести себя по-детски, например корчить рожи своему отражению в кузове автоцистерны.
Хотя Мак в основном дружит с Маккуином, он также может быть суровым, следя за тем, чтобы Маккуин тренировался достаточно в межсезонье, чтобы оставаться в форме.
Силы и способности
Mack – очень прочное транспортное средство, позволяющее ему легко тянуть прицеп Лайтнинг. Тем не менее, он часто засыпает при этом, позволяя другим машинам толкать его по шоссе.
Мак также обладает способностями к гонкам, будучи способным выстоять в дорожных гонках против своих друзей, как показано в Cars 3: Driven to Win .Он также может использовать и стрелять из такого оружия, как ракеты и пулеметы.
Появления
- Список появлений этого субъекта см. В Mack / Appearances.
Профили и статистика
Легковые автомобили- Биос
- “ Бесконечные дни в дороге и бессонные ночи, пересекающие страну … Для некоторых эта жизнь могла бы быстро состариться. Но не Мак. Нет, сэр. Мак знает, насколько важна его роль.Он за рулем Lightning McQueen, самого быстрого гоночного автомобиля в мире. Он – часть команды, и все знают, что в команде нет «я», как нет «я» в Mack. “ [1]
- “ Если Мак – это одно, он верен, и когда его боссу Молния МакКуину понадобится помощь, он поможет, даже если это означает, что он установит два бензобака и превратится в бригаду из одного человека. ” [1 ]
- Биос
- “ Мак – доверенный водитель-дальнобойщик Молнии МакКуина, который путешествует по стране от гонки к гонке, всегда с улыбкой на гриле.После высадки Лайтнинг в Радиатор-Спрингс со своим четвертым чемпионским трофеем Piston Cup, Мак отправляется с остальной командой в заслуженный отпуск. Кто знал, что Лайтнинг в конечном итоге вылетит на гонку вокруг земного шара в Мировом Гран-при? “ [2]
- Биос
- “ Если есть одна машина, которая была с МакКуином почти с самого начала, это Мак. Хотя он технически перевозчик гонок, Мак – это гораздо больше, чем просто часть команды МакКуина.Мак – доверенное лицо МакКуина, его хороший друг и его помощник. Он всегда рядом и всегда готов к работе, будь то доставить Маккуина к дерби по сносу или доставить его до Флориды 500. “ [3]
Образы
Галерея
- Галерею изображений по этой теме см. Mack / Gallery.
Цитаты
- “ Эй, малыш! Поздравляю с галстуком! ” – Машины
- “ Я припарковал его у палатки вашего спонсора. “- Легковые автомобили
- “ Вы должны появиться лично. ” – Автомобили
- “ Калифорния, мы идем! ” – Автомобили
- “ Что? Я забыл протереть брызговики? ” – Автомобили
- “ В конце концов,« канистра с бензином »- мое второе имя. » – Cars
- “ Эй, малыш! Ты готов после этого Piston Cup? ” – Cars: The Video Game
- “ Ну, ты сказал это… как только вы попрактикуетесь. “- Cars: The Video Game
- “ Кроме того, они просто не позволяют никому с четырьмя колесами участвовать в гонках за Кубок Поршня, знаете ли … ” – Cars: The Video Game
- “ Ох уж эти лучшие друзья приветы. С каждым годом они становятся длиннее! ” – Cars 2
- “ О, эти двое идеально подходят друг другу. ” – Машины 2
Имена на других языках
- Финский: Марка
- Польский: Мариан , Манек
- Испанский: Mack , Mackey
- Русский: Мак (транскрипция: Мак )
- Украинский: Мак (транскрипция: Мак )
Общая информация
- Ветрозащитный экран на крыше Mack на самом деле напоминает кепку дальнобойщика, которую в реальной жизни часто носят многие водители грузовиков.Это заметно по выступающему над его лобовым стеклом (глазам) козырьку.
- Мак и Лиззи – единственные жители Радиатор-Спрингс, которые не едут в Англию в Cars 2 .
- Они также не видели, как Маккуин и его команда вылетали в Токио, Япония.
- Mack – единственный командный самосвал Piston Cup, который является автомобилем Mack Trucks. Другие самосвалы – это полуприцепы Aeroliner. Полуприцепы Next Generation также производятся собственным производителем Next-Gen.
- Орнамент на капюшоне в форме собаки на капюшоне Мака не «автомобильный».
- Мак – один из 12 персонажей, появившихся во всех трех фильмах.
- В удаленной Парижской гонке для Cars 2, Мака можно увидеть в яме Маккуина, возможно, это означает, что он собирался сыграть более важную роль в фильме.
Список литературы
Mack Zalin – Блог о библиотеках и университетских музеях Шеридана
Пожалуйста, наслаждайтесь этим интервью с одним из библиотекарей Шериданских библиотек Университета Джона Хопкинса: Маком Залиным!
Кто вы и чем занимаетесь?
Меня зовут Маккензи (Мак) Залин, я библиотекарь по современным языкам, литературе, сравнительной мысли и литературе в Университете Джона Хопкинса.Я провожу много времени, наблюдая за созданием коллекций на французском, немецком, испанском, итальянском, португальском, иврите и идиш, но работаю в области инструкций, справочников, специальных коллекций и научных коммуникаций (как один из представителей гуманитарных наук в Шеридане). Группа библиотек) тоже очень загружает меня.
Расскажите немного о своем опыте.
Прежде чем стать библиотекарем (MSLS, Университет Северной Каролины, Чапел-Хилл), я учился на классициста (доктор философии, Университет Дьюка).Однако моей первой академической любовью был испанский, начиная с начальной школы. После того, как я узнал о взаимосвязи между латинским и испанским языком в старшей школе и о том, как их можно объединить (наряду с историей, археологией, путешествиями и т. Д.) Под эгидой классики, я в конечном итоге получил в этой области степени бакалавра, магистра и доктора. поле. Это в конечном итоге потребовало от меня выучить большинство языков, которые я сейчас курирую в библиотеках Шеридана (плюс латинский и греческий, которые курирует мой коллега и друг Дон Джуэдес).Как вы, наверное, заметили, я люблю языки («филолог», как меня все еще называют) так же сильно, как и библиотеки, поэтому мне повезло, что я могу комбинировать их здесь, в Хопкинсе.
О какой части вашей работы люди могут не знать?
Многие люди могут быть удивлены, узнав, насколько экстравертное библиотечное дело является профессией. Хотя я действительно провожу изрядное количество времени каждый день в своем офисе, исследуя, что купить для сбора и отвечая на электронные письма, основная часть моей работы связана с общением лицом к лицу со студентами, преподавателями и сотрудниками со всего университета.Личное взаимодействие с различными заинтересованными сторонами – отличный способ проверить, что я думаю, что я знаю о данной проблеме, и как ее можно лучше решить. Это также помогает предотвратить застой (не то чтобы невероятно разнообразные задачи библиотекаря действительно позволяют это в первую очередь).
Что самое лучшее в работе библиотекаря?
Мне нравится, что все, что я когда-либо узнал (или когда-либо выучу, если на то пошло), может быть актуальным в библиотеке.Это особенно верно в отношении Хопкинса, где работа в области гуманитарных наук невероятно междисциплинарна.
Какое у вас любимое хобби?
Я играл на кларнете и бас-кларнете в различных ансамблях со школы. Одним из самых сложных моментов в переезде из Северной Каролины в Балтимор, чтобы занять свою должность в Hopkins, был уход из Durham Medical Orchestra (ранее Duke Medicine Orchestra), в котором я играл много лет. Хорошая новость в том, что здесь нет недостатка в ансамблях, поэтому я с нетерпением жду возможности вернуться к музыке, надеюсь, в конце этого года.
Вы должны есть одно и то же каждый день всю оставшуюся жизнь. Что это?
Я большой сторонник (и поклонник) средиземноморской диеты в любой форме, поэтому я, вероятно, мог бы есть любые основные продукты этой кухни каждый день (если они были достаточно свежими).
Если бы вы могли выбрать в качестве лучшего друга вымышленного персонажа, кто бы это был и почему?
Это сложный вопрос, но мне, вероятно, придется пойти с Данстаном Рамзи из R.Книга Дэвиса Fifth Business, с Я всегда стремился быть спокойным авантюристом, но в то же время интроспективным эрудитом, каким, как я помню, был изображен Рамзи в том романе. Я также согласился бы стать лучшими друзьями с Индианой Джонсом.
Если бы вы не были библиотекарем, кем бы вы были? Почему?
Я собирался назвать дирижером оркестра или композитором, но мне нужно было быть намного более талантливым в музыкальном плане, чем я должен быть любым из них.Даже если бы я был таковым, мне, наверное, все равно было бы больше нравится быть библиотекарем.
Какой лучший концерт вы когда-либо видели? Что сделало его особенным?
Мы с женой пробирались сквозь сильный снегопад, чтобы увидеть Шэрон Джонс и The Dap-Kings, когда они приехали в Дарем в 2014 году. Это был невероятный набор, который еще больше понравился мучительной прогулкой по остаткам зимней бури. Шэрон Джонс скончалась в 2016 году, поэтому мне еще больше повезло, что я услышал и увидел это потрясающее выступление до того, как группа распалась.
