Устройство и принцип работы преобразователя частоты
16526
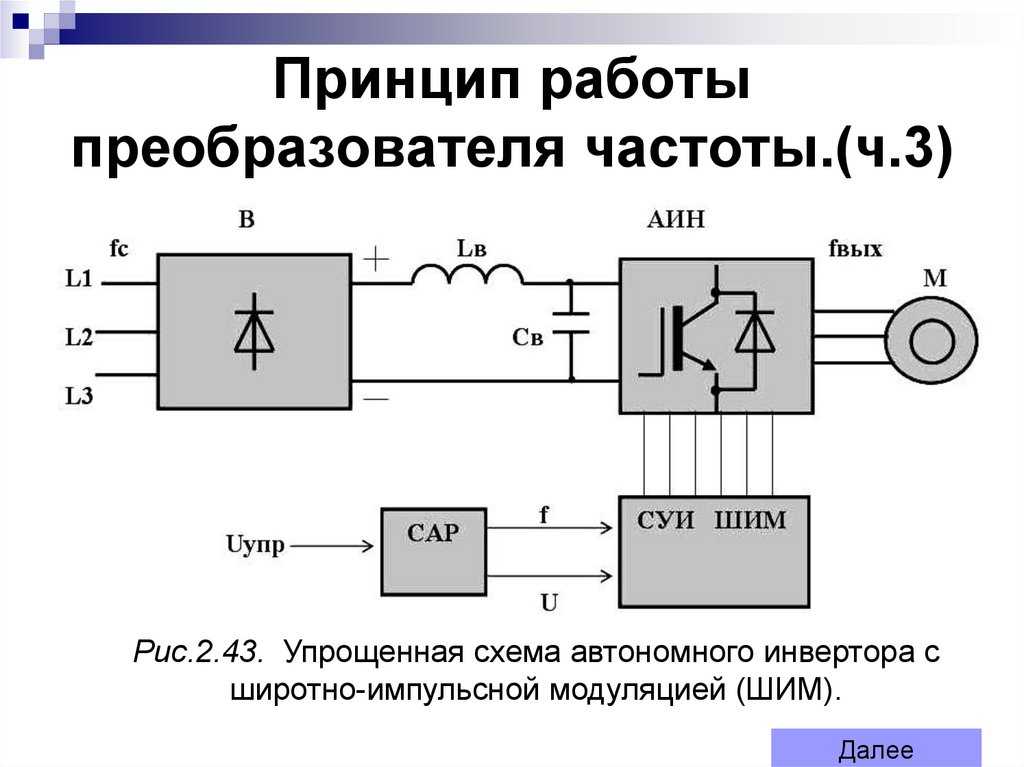
Преобразователи частоты (ПЧ, частотники, частотные преобразователи), которые сейчас используются с асинхронными двигателями, как правило, строятся по схеме двойного преобразования электроэнергии. Первое преобразование осуществляется выпрямителем, второе инвертором.
Основные составные части ПЧ: выпрямитель, звено постоянного тока, инвертор
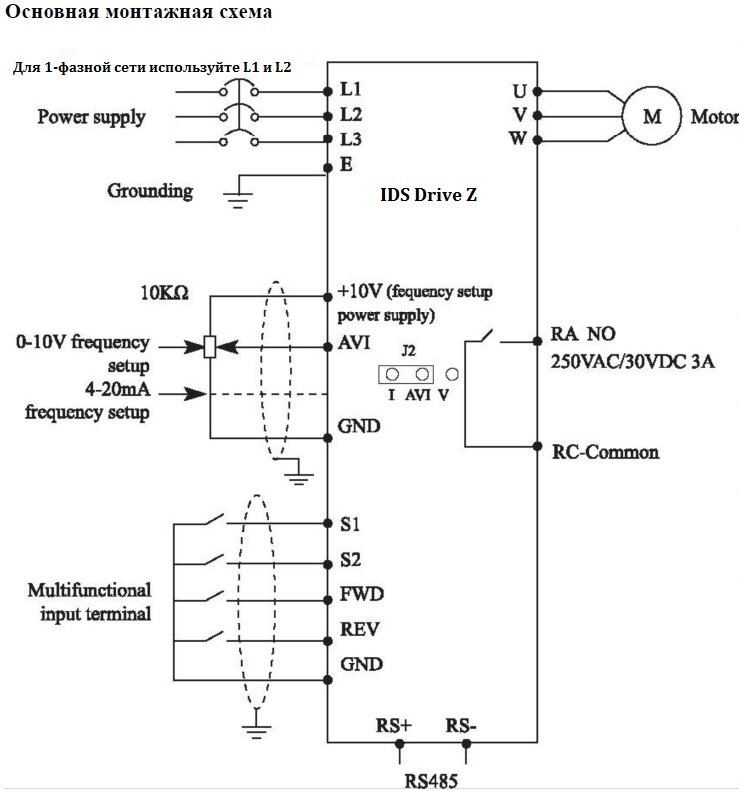
Рис. 1. Принципиальная схема ПЧ
Выпрямитель строится на выпрямительных диодах либо, что бывает реже, по диодно-тиристорной схеме. Остановимся на самом простом – диодном выпрямлении.
Трехфазное сетевое напряжение с частотой 50 Гц и напряжением 380 В поступает на вход выпрямителя. После выпрямления мы получаем пульсирующее напряжение, оно уже имеет определенного рода пульсации, но постоянным еще не является. Постоянным напряжение становится после попадания на звено постоянного тока и сглаживания пульсаций. Между выпрямителем и звеном постоянного тока расположен так называемый резистор предзаряда.
Между выпрямителем и звеном постоянного тока расположен так называемый резистор предзаряда.
Резистор предзаряда ограничивает ток заряда конденсаторов в первый момент времени, таким образом предохраняя диоды выпрямителя и сеть от большого броска тока. По мере заряда конденсатора этот резистор отключается и в дальнейшей работе участия не принимает.
Звено постоянного тока представляет собой, как правило, набор конденсаторов довольно большой емкости. Задача этого элемента максимально сгладить пульсации напряжения, привести его к постоянному значению. В нормальной ситуации, когда сетевое переменное напряжение 380 В, значение на звене выпрямленного постоянного тока составляет 540 В. Если сетевое напряжение больше или меньше, то величина выпрямленного напряжения пропорционально увеличивается или уменьшается.
Структура и особенности работы инвентора
После выпрямителя напряжение поступает на инвертор. Инвертор является самой сложной и важной частью преобразователя частоты.
Схема прибора включает в себя также слаботочные цепи, которые помогают взаимодействию всех основных частей ПЧ. В частности, есть центральный процессор, который является, по сути, мозгом преобразователя, управляет как работой инвертора, так и других частей устройства. Информацию о выходном токе процессор получает от датчиков тока, расположенных на выходных цепях ПЧ. Сигнал с датчиков тока обрабатывается, и процессор далее формирует управляющий алгоритм, чтобы преобразователь мог функционировать в заданных пользователем условиях. Также еще есть источник питания собственных нужд, он питает как процессорную часть, так и часть, отвечающую за измерения выходного тока и измерение напряжения на звене постоянного тока. Помимо этого, есть блок драйверных микросхем, которые в свою очередь управляют транзисторами инверторной части, и еще ряд вспомогательных элементов.
Рис. 2. Принципиальная схема инвертора
Рассмотрим принципиальное устройство инверторной части. Основными элементами силовой части инвертора являются IGBT-транзисторы – мощные, специально спроектированные для работы в ключевом режиме. Это гибрид полевого и биполярного транзисторов. Управляющая часть представляет собой изолированный затвор (как у полевого), а силовая часть повторяет устройство биполярного, у которого имеется коллектор–эмиттер.
Силовые элементы выпускаются в виде сдвоенного модуля, состоящего из двух силовых транзисторов, включенных последовательно. Каждый из транзисторов шунтируется диодом в обратном направлении. Поскольку на выходе должно быть 3 фазы, в конструкции инвертора имеется 3 плеча (см. рис 2).
Рис. 3. Эквивалентная схема работы транзисторов
Чтобы лучше понять принцип работы, рассмотрим эквивалентную схему, где каждый транзистор заменен обычным выключателем. На схеме (рис. 3) условными обозначениями показаны 6 выключателей (транзисторов) и электродвигатель.
На схеме (рис. 3) условными обозначениями показаны 6 выключателей (транзисторов) и электродвигатель.
Изучим, как формируются выходные токи в обмотках двигателя. За управление транзисторами (переключателями на схеме) отвечает центральный процессор. Он переключает их строго по определенной программе, которая задается изначально алгоритмом его действия.
На схеме показано срабатывание ключей № 1, № 4, № 6. Обратите внимание, категорически не допускается ситуация, когда в одном плече замкнут и верхний ключ, и нижний – это короткое замыкание и отказ изделия. В ситуации, показанной на схеме, ток протекает через открытый ключ № 1, далее заходит в обмотку А электродвигателя, выходит из обмоток B и C, и через открытые нижние ключи №4 и № 6 уходит в минусовое звено.
Для того чтобы поменять ток в обмотке C, нужно переключить ключи среднего плеча. Ток по-прежнему будет протекать через открытый ключ № 1, а уходить через обмотку B и ключ №6 в минусовое плечо. При этом, одновременно, через замкнутый ключ № 3 и втекающий ток через обмотку C уходит в минус. Меняя положение открытых и закрытых ключей можно менять ток в обмотках двигателя. Если это делать по определенной программе, то получится изменяемый ток, как при работе двигателя от сети, то есть будет происходить плавное перетекание одной фазы в другую.
При этом, одновременно, через замкнутый ключ № 3 и втекающий ток через обмотку C уходит в минус. Меняя положение открытых и закрытых ключей можно менять ток в обмотках двигателя. Если это делать по определенной программе, то получится изменяемый ток, как при работе двигателя от сети, то есть будет происходить плавное перетекание одной фазы в другую.
Рис. 4. Протекание тока в инверторе
Теперь вместо упрощенной схемы с выключателями рассмотрим, как протекает ток в цепи транзисторов на примере реального инвертора (рис. 4). По своей сути этот процесс ничем не отличается от рассмотренного ранее ключевого режима, за исключением того, что мы имеем дело с реальным двигателем, который, в принципе, является индуктивной нагрузкой.
В момент закрытия ключа индуктивность двигателя не позволит току мгновенно прекратиться за счет явления самоиндукции. Этот остаточный ток гасится обратными диодами, которые подключены к закрытым транзисторам (см. рис. 4), т.е. в момент выключения (закрывания) транзисторов остаточный ток протекает через обратные диоды, таким образом предотвращаются выбросы напряжения на ключе.
рис. 4), т.е. в момент выключения (закрывания) транзисторов остаточный ток протекает через обратные диоды, таким образом предотвращаются выбросы напряжения на ключе.
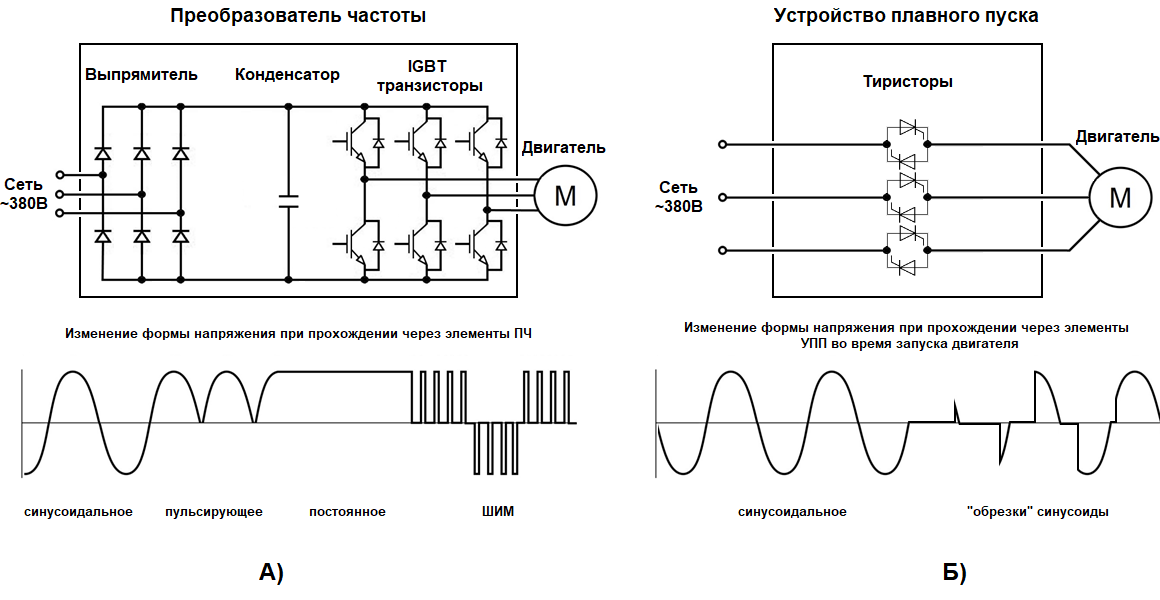
Но поскольку транзистор работает как ключ, он может выдать либо полное напряжение на двигатель, либо не выдать вообще. На практике же нужно получить некое плавное напряжение синусоидальной формы, причем изменяемое как по величине, так и по частоте, для того чтобы иметь возможность управлять скоростью вращения асинхронного двигателя.
Алгоритм работы ШИМ
Далее рассмотрим, как формируется выходное напряжение методом широтно-импульсной модуляции (ШИМ). Для примера возьмем некую гидравлическую модель, которая нам поможет понять, что происходит.
Рис. 5. Гидравлическая модель
Представим себе, что имеется ряд емкостей сосудов. В нижней части у каждого есть отверстия. С помощью некого устройства, которое выдает капельки воды определенных размеров с неизменной частотой, начинаем наполнять эти сосуды. Понятно, что там, где размер капель небольшой, уровень жидкости установится на низком уровне, а чем больше размер капель, тем более высокий уровень будет иметь жидкость в сосуде. Подобрав определенным образом размер капель, можно получить огибающую этих уровней (см. рис. 5). Таким образом получилось изобразить статическую картину, которая дает понимание процесса, как можно из дискретных частей сделать некое подобие аналоговых.
Понятно, что там, где размер капель небольшой, уровень жидкости установится на низком уровне, а чем больше размер капель, тем более высокий уровень будет иметь жидкость в сосуде. Подобрав определенным образом размер капель, можно получить огибающую этих уровней (см. рис. 5). Таким образом получилось изобразить статическую картину, которая дает понимание процесса, как можно из дискретных частей сделать некое подобие аналоговых.
Теперь перейдем к работе в динамике. Представим, что сосуд один, но меняем размер капель, которыми он заполняется. В нижней части рис. 5 показан процесс в этот момент времени – по оси x время (t), по оси y напряжение (U) или, по-другому – уровень воды в сосуде. По мере того, как изменяется размер капли, изменяется и средний уровень жидкости, он возрастает, а затем начинает падать. Это уже динамический процесс. Теперь проводим аналогию с электричеством.
Рис 6. Преобразование дискретного сигнала в аналоговый
На рис.
Введем несколько параметров и объясним их.
- Период сигнала ШИМ – это время между импульсами. Параметр строго задан и не меняется (из ранее описанного примера это когда капельки все капают с одинаковой частотой, только разного размера).
- Частота ШИМ-модуляции — обратно пропорциональна длительности периода, это то, что мы имеем как один из параметров при программировании преобразователя частоты. Определяет частоту следования импульсов на выходе каждого из каналов IGBT-модуля.
- Длительность импульса (t-импульса). Определяется уже самим процессором. То есть процессор в зависимости от заданного значения выходного сигнала в данный момент определяет, на какое время нужно открыть каждый ключ.
 Если рассмотреть общий период изменения этих колебаний, будем иметь период выходной частоты (t-выходная). Это выходная частота, которая будет у нас на выходе преобразователя частоты. От нее прямо пропорционально зависит скорость вращения двигателя.
Если рассмотреть общий период изменения этих колебаний, будем иметь период выходной частоты (t-выходная). Это выходная частота, которая будет у нас на выходе преобразователя частоты. От нее прямо пропорционально зависит скорость вращения двигателя.
За тем, чтобы двигатель не перегружался, и напряжение, которое подводится к нему на этой частоте, пропорционально уменьшалось или увеличивалось, следит преобразователь частоты. Он сам определяет необходимое время открытия каждого ключа, то есть определяя t-импульс. И такая ситуация происходит одновременно на трех каналах, ведущих на выход преобразователя на электродвигатель.
Из рисунка видно, что чем чаще будут идти импульсы, тем ближе форма напряжения будет к синусоидальной.
Критерии выбора частоты
На практике частота ШИМ может задаваться пользователем, как правило, в пределах от 1 до 15 килогерц. Для того чтобы получить напряжение по форме более-менее близкой к синусоидальной, частота ШИМ должна быть в 20-30 раз больше максимальной выходной частоты, которую вы хотите получить.
Вы можете выбрать частоту ШИМ произвольно под свою конкретную задачу. Есть несколько параметров, которые определяют выбор.
Рис.7. Параметры, влияющие на выбор частоты ШИМ
1. Длина кабеля до двигателя. Чем длиннее кабель, тем меньшую частоту ШИМ можно задать. Например если у вас длина кабеля 100 метров и больше, то частоту ШИМ больше 2,3 килогерц нет смысла ставить, иначе на этой длине будут большие потери и напрасный расход мощности.
2. Акустический шум двигателя. При питании двигателя от преобразователя частоты слышится посторонний шум. Он зависит именно от частоты ШИМ, которую вы задали. Чем она выше, тем выше тон звука. Если задана чистота более 8,10 килогерц, шума практически не слышно. На более низких частотах (1,3,5 килогерц) этот шум значителен и вызывает дискомфорт.
3. Максимальная выходная частота. Большинство двигателей используют максимальную выходную частоту инвертора 50 гц, поэтому здесь частота ШИМ должна быть не менее чем в 20 раз выше. Здесь можно задавать частоту 1, 2, 3, 5 килогерц из всего диапазона.
Здесь можно задавать частоту 1, 2, 3, 5 килогерц из всего диапазона.
Если вы используете высокоскоростной двигатель, например 400-герцевый, то здесь уже частоту ШИМ 1,3,5 килогерц ставить не стоит: на выходе будет не синусоида. Для таких скоростных двигателей частота ШИМ выбирается максимально возможной для данного инвертора, скажем, 15 килогерц.
4. Тепловыделение инверторной части преобразователя. Оно связано с тем, что IGBT-транзисторы, которые формируют выходное напряжение, не идеальны, подвержены разогреву в процессе работы. Для того чтобы эффективно отводить тепло, надо применять соответствующие радиаторы, вентиляторы охлаждения. Чем больше тепловыделение в этой инверторной части, тем более мощные приборы для охлаждения надо использовать.
Потери энергии в частотном преобразователе и способы их снижения
Рассмотрим вопрос тепловыделения в инверторной части преобразователя. Чем определяются потери транзистора?
Рис.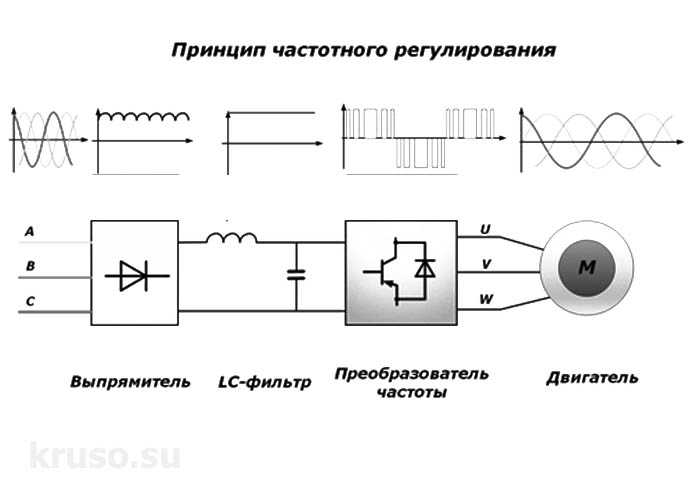 8. Потери энергии
8. Потери энергии
Возьмем условный IGBT-транзистор, который включен в цепь с напряжением 500 вольт, ограничивающий резистор.
Закрытое состояние: на затворе напряжения нет, напряжение на коллекторе равно сетевому напряжению, ток отсутствует, утечки мизерные, тепловыделения никакого нет. Открываем транзистор с помощью напряжения 10 вольт на затворе, это стандартное напряжение практически для всех транзисторных модулей. Транзистор переключается в открытое состояние не мгновенно, у каждого транзистора есть параметр, который называется время включения или время выключения. Типичное значение для самых распространенных транзисторов — 0,2 микросекунды. Время небольшое, но за это время на кристалле транзистора присутствует как напряжение, которое быстро спадает, так и нарастающее значение тока, которое тоже нарастает не мгновенно. В этот момент происходят потери. И чем выше частота ШИМ, про которую мы раньше говорили, чем чаще включается и выключается транзистор, тем больше идет тепловыделения за счет потерь переключений.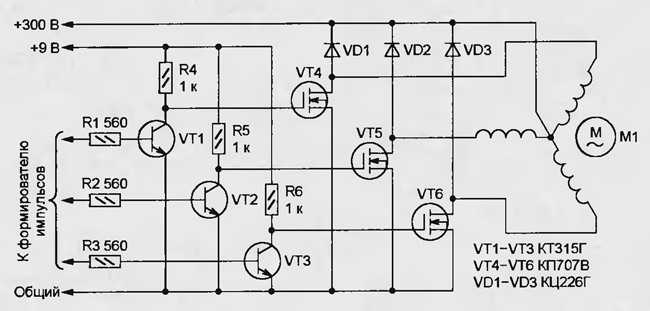
Когда транзистор открылся, установился статический режим на какое-то небольшое время, тепловыделение продолжается: оно происходит за счет того, что в момент состояния открытия, напряжение на транзисторе тоже не равно нулю, он определяется потерями на кристалле в открытом состоянии. Типичное его значение 1,5 вольта. Оно может незначительно варьироваться в зависимости от технологии изготовления транзистора и пр.
В этот момент тепловыделение тоже существует, но с потерями в открытом состоянии мы ничего не можем сделать, максимум — применить транзисторы с меньшим напряжением в открытом состоянии. С потерями при переключении мы можем бороться путем уменьшения частоты ШИМ. Это бывает полезно, если преобразователь находится в закрытом шкафу, где он греется больше. Понизив частоту ШИМ, мы можем снизить потери на преобразователе и снизить его температуру.
Общие потери преобразователя частоты в виде тепла составляют около 3%.
Потери на выпрямителе происходят через открытые диоды. Падение напряжения на открытом диоде, а также протекающий через него выпрямленный ток приводят к его нагреву. Звено постоянного тока, состоящее из электролитических конденсаторов большой емкости, тоже нагревается, потому что постоянно происходит процесс заряда и разряда. Также к потерям можно отнести собственные нужды преобразователя частоты: работу вентиляторов охлаждения, электронной схемы, вторичного источника питания и так далее.
Падение напряжения на открытом диоде, а также протекающий через него выпрямленный ток приводят к его нагреву. Звено постоянного тока, состоящее из электролитических конденсаторов большой емкости, тоже нагревается, потому что постоянно происходит процесс заряда и разряда. Также к потерям можно отнести собственные нужды преобразователя частоты: работу вентиляторов охлаждения, электронной схемы, вторичного источника питания и так далее.
Состав типового частотного преобразователя (на примере 75 кВт)
Рис.9. Состав типового преобразователя частоты
Рассмотрим некий преобразователь частоты мощностью 75 кВт с выходным током 150 ампер. В таком преобразователе используются выпрямительные диоды с номинальным током 200 ампер на рабочее напряжение 1600 вольт, их здесь 6 штук. Звено постоянного тока состоит из набора электролитических конденсаторов, они обычно включаются параллельно и последовательно для получения необходимой емкости и рабочего напряжения.
В данном случае суммарная емкость будет равна 6800 микрофарад и рабочее напряжение батареи — 800 вольт. Инверторная часть состоит из IGBT-транзисторов с током в открытом состоянии 300 ампер и рабочим напряжением 1200 вольт. Ниже фотографии некого типичного диодного модуля, он состоит из двух диодов в верхней и нижней части (верхнее и нижнее плечо). И IGBT-транзистор точно также состоит из двух транзисторов, верхнего и нижнего плеча.
В преобразователях малой мощности (до 15, 22 киловатт и меньше) в качестве силового элемента используется матрица IGBT. Выпрямительная часть собрана в виде готового модуля с тремя выводами для подключения переменного напряжения и выходом на плюс-минус звена постоянного тока. Здесь включается резистор предзаряда либо другие элементы между выпрямительной частью и инверторной. Инверторная часть собрана на 6 транзисторах, шунтированных диодами, то есть готовых выходов для подключения на двигатель.
Один из обязательных элементов матрицы IGBT — ключ для управления тормозным резистором. Как правило, матрица IGBT снабжается встроенным терморезистором, который позволяет преобразователю частоты оценивать температуру силовых элементов и соответственно управлять вентиляторами для обдува радиатора.
Как правило, матрица IGBT снабжается встроенным терморезистором, который позволяет преобразователю частоты оценивать температуру силовых элементов и соответственно управлять вентиляторами для обдува радиатора.
Открытый проект частотного преобразователя для управления электродвигателями / Хабр
Цель проекта
Сделать компактный, встраиваемый и недорогой частотный преобразователь с питанием от однофазной сети 230-240 В 50Гц, способный управлять асинхронными 220 В 3-х фазными двигателями 1..2 кВт, для плавного разгона и остановки и поддержания частоты вращения от 0 до 1500 об. в мин. Связь с устройством через полевую шину CAN или RS485.
Решиться делать свой ЧП непросто, потому что есть масса готовых на любой вкус. Своя мелкосерийная разработка по цене будет неконкурентной. Однако если в ЧП перенести часть функциональности конечного агрегата помимо управления мотором, то можно удешевить аппаратную обвязку вокруг ЧП и экономически оправдать его создание.
Поиск интегрированных решений
В сети есть открытые проекты и отладочные платы частотных преобразователей с полной документацией и неплохо документированным софтом. Остаются неясными только вопросы оптимальности архитектуры, альтернативной компонентной базы, безопасности, электромагнитной эмиссии, надежности и прочая мелочь вроде диагностики, зазоров, клем, ремонтопригодности… Словом вопросов остается много.
Мы начали с покупки, казалось бы, солидного решения от фирмы Microchip. Коллеги по соседству тоже делали ЧП на Microchip, и я подумал что это то что нужно. Да, там еще был и корректор мощности.
Эта плата сгорела после первого же подключения реального 1 кВт AC мотора. Изучив трассировку плат, стало понятно, что не сгореть это не могло. Вспыхнула пара дорожек под процессорным модулем. Что-то не рассчитали с их шириной. От решений Microchip сразу отказались и больше не возвращались. Все-таки нишевые микроконтроллерные архитектуры — это не наше. А тут еще такой фейл.
Были еще рассмотрены решения от ST, TI, NXP(Freescale), Infineon. Все хотят привязать разработчика к своим семействам микроконтроллеров. Используют для этого все средства – от лицензионных соглашений, до закрытых библиотек и программных инструментов. Этот мир вдруг показался неуютным.
Изучение других ЧП
Так как наборы разработчика от производителей чипов перестали вызывать доверие, то вторым шагом было посмотреть, как сделаны промышленные ЧП. Интересно узнать какие там микроконтроллеры, сколько их, какие силовые элементы, драйверы и прочее.
HANNING ELEKTRO-WERKE GmbH & Co. KG.
Это изделия, относящиеся к классу встраиваемых. Имеют пассивное охлаждение, т. е. в них отсутствуют вентиляторы. Лишены всяких элементов ручного управления и индикации, поскольку ставятся в труднодоступных местах. Предполагается подключение к неким внешним панелям управления через интерфейс RS485. Теоретически должны быть идеально согласованы с управляемыми ими моторами.
Правда опыт эксплуатации несколько испортил впечатление. Несмотря на наличие усиленных EMI фильтров и специализированных микроконтроллеров несколько таких преобразователей у нас сгорело просто потому, что заклинивало редукторы у моторов. Ниже показаны снимки внутренности одного из ЧП данной серии.
OMRON 3G3MX2-A4040-E.
Это ЧП общего применения c 3-фазным входом. Очень многофункциональный. Настолько, что одних только регулируемых параметров в нем около 700. Мануал 350 страниц. Состоят из четырёх многослойных плат с двухсторонним монтажом. Решение довольно дорогое для мелкосерийной разработки, но все равно интересное с точки зрения применяемых вычислительных ресурсов.
Преобразователь OMRON не имеет корректора мощности, но в случае необходимости дополнительного подавления пульсация тока в разрыв DC шины можно подключить внешний мощный дроссель. Также нет стартового реле с ограничителем тока при подаче напряжения, эту роль скорее всего выполняет твердотельный ключ с резистором 13 Ом. Обмен с сервисной программой несмотря на USB очень медленный. ЭМИ-фильтра на борту нет. Отличаются повышенной перегрузочной способностью, видимо обусловленной оригинальным исполнением IGBT модуля.
Обмен с сервисной программой несмотря на USB очень медленный. ЭМИ-фильтра на борту нет. Отличаются повышенной перегрузочной способностью, видимо обусловленной оригинальным исполнением IGBT модуля.
Invertek OPTIDRIVE P2
Частотный преобразователь OPTIDRIVE P2 очень технологично скомпонован и послужил образцом для нашего проекта. Выполнен также на двух микроконтроллерах, но до второго добраться не удалось. В качестве силового элемента использована сборка SPM 45 Series от фирмы FAIRCHILD.
Еще изучались преобразователи Lenze SMVector (выполнен на MC9S12E128, 16 bit, 128 KB Flash, 8 KB RAM, 50 MHz и MC68H0908, 8 bit, 32 KB Flash, 512 B RAM, 8 MHz)
Shenzhen INVT Electric Goodrive20-EU
И наконец на самом пике дефицита пришлось изучить преобразователь, разработанный в Китае – Goodrive20-EU. Надо признать, что Goodrive20 явился примером экономии на всем: меньший чем у остальных размер радиатора, меньшая емкость конденсаторов, всего один микроконтроллер, отсутствие ЭМИ-фильтра, лаконичная документация, сравнительно бедный набор регулируемых параметров.
И тем не менее он работал не хуже чем Omron MX2 в некоторых применениях, хотя и с нюансами в способе управления. В частности, долго инициализируется после подачи питания.
Обобщенная структурная схема ЧП
В результате сформировалось представление об обобщенной архитектуре ЧП.
Во-первых, во всех исследованных ЧП применяются интегрированные IGBT модули. На дискретных транзисторах изделий не попадалось. Всегда есть узел ограничителя тока включения. Даже до мощностей в 3 кВт с питанием от однофазной сети не встречаются корректоры мощности (ККМ). Наличие EMI фильтра тоже не является обязательным. Не бывает в ЧП и предохранителей. ЧП всегда включают через защитные автоматы.
Интерфейсная часть ЧП гальванически развязана от силовой части. Силовая часть находится под управлением микроконтроллера с архитектурой DSP или RISC. Микроконтроллеры при этом не самые быстрые по современным меркам, не более 80 МГц. Интерфейсная часть может содержать, а может и не содержать отдельного микроконтроллера. Измерители токов фаз на двигателе делаются на основе шунтов, присоединённых к минусу DC шины. Важным компонентом промышленных ЧП является сдублированный узел экстренного гарантированного отключения мотора (safe torque off, STO). Это узел позволяет отказаться от пары внешних контакторов для отключения питания ЧП в экстренных случаях.
Измерители токов фаз на двигателе делаются на основе шунтов, присоединённых к минусу DC шины. Важным компонентом промышленных ЧП является сдублированный узел экстренного гарантированного отключения мотора (safe torque off, STO). Это узел позволяет отказаться от пары внешних контакторов для отключения питания ЧП в экстренных случаях.
В результате анализа было решено для своего ЧП использовать один микроконтроллер, но более производительный. Им стал MK60FN1M0VLQ12 (ARM® Cortex®-M4, 120 МГц, 1 MB Flash, 128 KB RAM). В пользу такого выбора было несколько аргументов. На тот момент фирма Freescale выложила хороший программный инструментарий для разработки ПО управления двигателями и его отладки. И был расчёт на применение вычислений с плавающей точкой вместо вычислений с фиксированной. Это облегчило бы отладку, моделирование и тестирование. Про остальные аргументы было в этой статье.
Конструкция ЧП
Поскольку ЧП встраиваемый, то он не нуждается в специальном корпусе.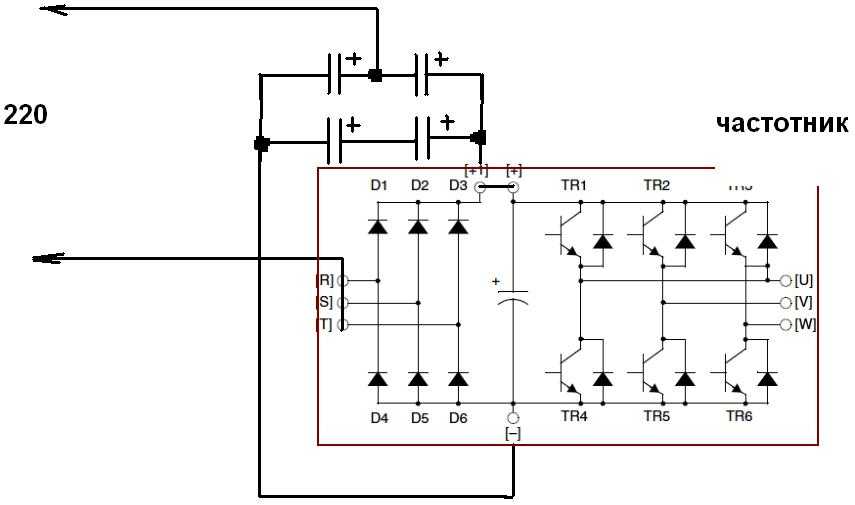 Поэтому был изготовлен простой кожух из листовой стали с креплением двух вентиляторов. Была цель максимально упростить сборку и разборку ЧП. Пилотная версия нашего ЧП в свое время размещалась на одной плате. В этой версии стало три платы. Таким образом ЧП получился более компактным. А его модульность позволяет удешевить модификации функциональности и проще выполнять изменения в компонентной базе.
Поэтому был изготовлен простой кожух из листовой стали с креплением двух вентиляторов. Была цель максимально упростить сборку и разборку ЧП. Пилотная версия нашего ЧП в свое время размещалась на одной плате. В этой версии стало три платы. Таким образом ЧП получился более компактным. А его модульность позволяет удешевить модификации функциональности и проще выполнять изменения в компонентной базе.
ЧП состоит из трех основных плат:
Управляющая плата с микроконтроллером и внешними интерфейсами.
Плата DC шины, на которой расположен блок питания и блок конденсаторов
Силовая плата, на которой расположен IGBT модуль, силовые входы и выходы, измерители тока, EMI фильтр.
Компоненты ЧП
Управляющая плата
На управляющей плате находится микроконтроллер и гальвано изолированные внешние интерфейсы:
интерфейс для подключения внешнего квадратурного энкодера
интерфейс RS232
интерфейс CAN
интерфейс USB
три дискретных выхода и один дискретный вход
Управляющая плата соединяется с силовой платой двумя плоскими шлейфами через разъемы X7 и X8.
 Через X7 проходят сигналы управления затворами IGBT модуля. Через X8 проходят сигналы измерения тока и напряжения, линии I2C и несколько других сигналов. Похожая схема применяется в Goodrive20-EU.
Через X7 проходят сигналы управления затворами IGBT модуля. Через X8 проходят сигналы измерения тока и напряжения, линии I2C и несколько других сигналов. Похожая схема применяется в Goodrive20-EU.
Кроме того, на управляющей плате находится литиевый аккумулятор для поддержания энергонезависимой работы часов реального времени, держатель для uSD карты и зуммер. Это не обязательные компоненты, но полезные на этапе разработки, отладки и диагностики ПО.
Плата DC шины
DC шина находится под напряжением 310…340 В и через нее проходит средний ток до 10А на максимальной мощности. На плате размещен блок питания в виде отдельного модуля. Так решено было сделать питание просто ради упрощения дизайна платы. На плате находится транзисторный ключ Q3 управляющий вентиляторами. Вентиляторы включаются только при достижении IGBT модулем определенной заданной температуры.
Плата DC шины и питанияСиловая плата
Главным элементом всего устройства является IGBT модуль.
В нашем случае использован модуль FSBB30CH60C. Модуль порадовал своей исключительной надежностью. В течении разработки не сгорел ни один модуль. Некоторое время назад это был самый доступный и недорогой модуль. Модуль управляется напрямую логическими сигналами и имеет встроенные защиты от недонапряжения и короткого замыкания.
Плата термосенсораНемного усложняет дело отсутствие температурного сенсора, встроенного в модуль. Термосенсор пришлось сделать отдельно на микросхеме MAX31725MTA+ на своей маленькой плате и разместить под корпусом IGBT модуля. Проект термосенсора находится в директории TempSensor. Термосенсор соединен с микроконтроллером интерфейсом I2C.
Измерение токов на трех выходах IGBT модуля сделано иначе чем в обычных ЧП. Вместо шунтов поставлены гальвано изолированные датчики Холла ACS759LCB-050B-PFF-T. Это более дорогое решение, но позволяющее более креативно подойти к выбору способов модуляции и упростить трассировку. Традиционные шунты в нижних плечах силовых транзисторов ограничивают возможные типы модуляций. Это не проблема в промышленных ЧП, но наш сделан еще и в экспериментальных целях и мог бы быть применен не только с асинхронными двигателями, но и с синхронными, и с более экзотическими.
Это не проблема в промышленных ЧП, но наш сделан еще и в экспериментальных целях и мог бы быть применен не только с асинхронными двигателями, но и с синхронными, и с более экзотическими.
Программное обеспечение
Фирмаваре ЧП состоит из двух частей: начального загрузчика и основного приложения.
Начальный загрузчик находится в директории Firmware/Inverter_bootloader и позволяет загружать основное приложение через CAN и через интерфейс RS232. Бинарный образ приложения создается утилитой BIB. Утилита находится в директории Firmware/Loader.
Помимо прочего образ может быть утилитой зашифрован. Загрузчик умеет расшифровывать образы.
Сам проект рабочего приложения находится в директории Firmware/Inverter_firmware. Компилируются проекты в среде EWARM, версии не выше 670.3
Представленное программное обеспечение расчитано на очень простое подключение ЧП.
Схема подключения ЧПЧП управляется по шине CAN в режиме скалярного управления.
Почему скалярного? Скалярное управление несмотря на все недостатки при этом характеризуется более низким уровнем шума издаваемым мотором, по крайней мере, когда имеем дело с ЧП, описанными выше и безсенсорным управлением. При стабильной нагрузке и номинальной скорости двигателя в основном рабочем цикле скалярное управление хорошо себя показывает.
Принято считать (“Practical Variable Speed Drives and Power Electronics”, Malcolm Barnes 2003 ) что безсенсорное скалярное управление обеспечивает точность скорости в 1% и время отклика момента 100 мс, а векторное безсенсорное соответственно 0.5% и 10 мс.
Результаты качества потребления энергии частотным преобразователем на разных мощностях при частоте модуляции 16 КГц:
Используемы в таблице обозначения:
V(V) – текущее действующее входное напряжение однофазной сети в вольтах
THD V(%) – total harmonic distortion, Коэффициент нелинейных искажений по напряжению
I(A) – действующее значение тока в амперах
THD I(%) – total harmonic distortion, Коэффициент нелинейных искажений по току
I peak (A) – пиковое значение тока в амперах
CF I (A) – Коэффициент амплитуды сигнала (крест-фактор) в амперах
|P| (W) – Активная потребляемая мощность в ваттах
Q (Var) – Реактивная потребляемая мощность.
 Единица измерения – вар
Единица измерения – варS (VA) – Полная потребляемая мощность. Единица измерения ВА
PF – Коэффициент мощности
COS PHI – косинус фи
Несколько слов о безопасности
Сначала о сохранности самого преобразователя. Всегда надо помнить о такой вещи как реформинг. Может случиться так что высоковольтные электролитические конденсаторы, установленные в ЧП где-то долго хранились, или сам ЧП не был подключен в сеть более года. В таком случае у конденсаторов истончается диэлектрический слой, и они могут не выдержать быстрой подачи на них полного номинального напряжения и рабочего тока. Тогда требуется реформинг или, иными словами, осторожное постепенное включение.
Защита от возгорания. Она организуется несколькими способами. Сами печатные платы должны быть изготовлены по соответствующей технологии и иметь UL маркировку. Далее необходимо обеспечить ширину силовых проводников на плате, исключающую их возгорание раньше, чем произойдёт выключение внешних силовых расцепителей.
Электробезопасность. Корпус ЧП обязательно должен заземляться. Варисторы на входе ЧП обеспечивают защиту от кратковременных перенапряжений, но при длительных перенапряжениях они сгорают, оставляя толстый слой проводящей сажи.
Тут в действие вступает заземление. Однако ставить чувствительные реле утечки на частотные преобразователи не рекомендуется, поскольку емкость мотора относительно земли настолько существенна, что может вызвать утечку большую чем уровень срабатывания реле. Поэтому заземление должно быть максимально надежным. Стоит также помнить, что заземление само по себе не обеспечивает защиту от электромагнитных помех, излучаемых самой цепью заземления. Поэтому все информационные кабели если они лежат рядом с цепью заземления или заземляющими конструкциями должны иметь свои экраны подключённые к собственным локальным землям. И такие экраны не должны образовывать замкнутых контуров.
Эксплуатационная безопасность. На роботизированных объекта, станках, агрегатах, подъемниках, кранах, эскалаторах – везде есть средства экстренной остановки в виде концевиков, датчиков, микровыключателей и проч. Чтобы люди сами могли активизировать экстренную остановку устанавливаются большие заметные красные кнопки. Все эти средства объединяются в электрическую цепь безопасности. Конечной точкой этой цепи являются контакторы, реле или иные ресцепители, обрывающие подачу тока на электродвигатели. На частотных преобразователях в роли расцепителя выступает узел STO (safe torque off) упомянутый выше. Обычно есть два дублирующихся входа STO, но в нашем ЧП есть только один. Это означает что для реализации дублирования средства безопасности дополнительно необходим внешний контактор, разрывающий цепь питания к ЧП при разрыве цепи безопасности. Так требуют стандарты.
В результате у нас получился вот такой ЧП
Для тех же кто заинтересовался проектом в директории JTAG_isolator лежит проект платы изолятора JTAG интерфейса. Очень трудно отлаживать электронику подключенную в сеть без хороших изоляторов.
Очень трудно отлаживать электронику подключенную в сеть без хороших изоляторов.
К сожалению, формат короткой статьи для хабра не позволяет описать все перипетии разработки, алгоритмы, архитектуру софта и прочие подробности. Поэтому заранее прошу понимания читателей если тема не раскрыта в желаемом объёме.
Ещё есть время.
Все материалы по проекту частотного преобразователя лежат и накапливаются тут – https://github.com/Indemsys/Frequency_Inverter
Схемы преобразователя частоты в напряжение Пояснение
Схемы преобразователя частоты в напряжение можно найти во многих различных электронных устройствах. Они используются для преобразования частоты сигнала переменного тока в соответствующее напряжение. Это может быть полезно для многих различных приложений, таких как питание двигателей или светодиодов. В этой статье мы обсудим основы преобразования частоты в напряжение и дадим несколько советов о том, как разработать собственные схемы преобразователя!
Общее определение преобразователей частоты в напряжение
Итак, начнем с главного вопроса, что такое схема преобразователя частоты в напряжение? Проще говоря, это устройство, которое принимает входной сигнал (в форме частоты) и преобразует его в пропорциональное выходное напряжение. Входной сигнал может быть переменного или постоянного тока. Эти устройства также известны как FM-преобразователи или преобразователи f-to-v. Затем это выходное напряжение можно использовать для управления различными устройствами или процессами.
Входной сигнал может быть переменного или постоянного тока. Эти устройства также известны как FM-преобразователи или преобразователи f-to-v. Затем это выходное напряжение можно использовать для управления различными устройствами или процессами.
Преобразователи частоты в напряжение используются в различных отраслях, включая автомобилестроение, аэрокосмическую промышленность и производство. Они обычно используются в таких устройствах, как спидометры и тахометры, где они преобразуют скорость вращения вала двигателя в электрический сигнал, который может отображаться на счетчике. Одним из наиболее распространенных применений является автомобильная промышленность, где они используются для управления частотой вращения двигателя. Они также широко используются в аудиосистемах для управления уровнем громкости. Другие области применения включают анализ вибрации и оборудование для испытаний материалов.
Существуют различные типы преобразователей частоты в напряжение. Они основаны на количестве каналов, линейности и типе входного сигнала.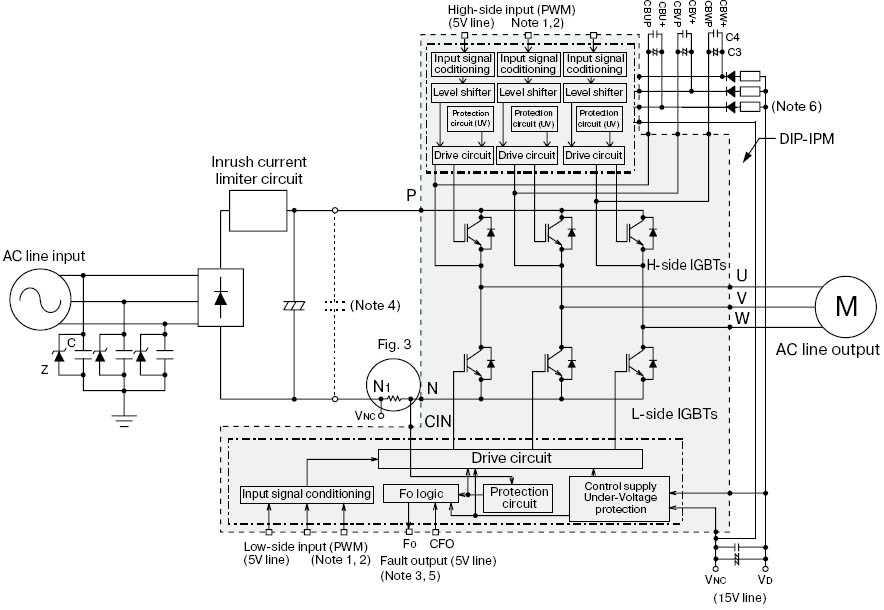 Наиболее распространенными типами являются несимметричные и дифференциальные преобразователи.
Наиболее распространенными типами являются несимметричные и дифференциальные преобразователи.
Дифференциальный преобразователь: Имеют два входа (положительный и отрицательный) и один выход. Преимущество этого типа в том, что он относительно невосприимчив к шуму.
Несимметричный преобразователь: Имеют только один вход и один выход. Они более восприимчивы к шуму, но их легче проектировать и строить.
Линейность: Относится к тому, насколько точно выходное напряжение представляет входную частоту. Если зависимость линейная, то удвоение входной частоты приведет к удвоению выходного напряжения. Если оно нелинейное, то отношение непропорциональное.
Какой тип схемы FVC лучше всего подходит для вашего конкретного приложения, зависит от ваших конкретных потребностей. Если точность имеет первостепенное значение, то, вероятно, вам лучше всего подойдет линейный преобразователь. Однако, если вам нужно иметь возможность обрабатывать широкий диапазон входных частот, то нелинейный преобразователь может быть лучшим выбором. [1], [2]
[1], [2]
Назначение схем преобразователя частоты в напряжение
Как мы только что упоминали, схемы преобразователя частоты в напряжение имеют широкий спектр применений в промышленности, где необходимо преобразовывать сигнал переменной частоты в пропорциональное напряжение.
Эти устройства обычно используются в спидометрах, где они преобразуют скорость вращения вала двигателя в электрический сигнал, который может отображаться на счетчике. Преобразовывая частоту в напряжение, становится легче контролировать скорость двигателя. Это связано с тем, что напряжение может изменяться для изменения скорости вращения двигателя.
Другие распространенные области применения схем преобразователя частоты в напряжение включают в себя различные инструменты для анализа вибрации и оборудование для испытаний материалов. FVC также можно использовать для сбора данных. Учитывая их широкий спектр применения, неудивительно, что они так популярны.
Использование FVC в системах безопасности
Другое применение FVC — в системах безопасности. Контролируя частоту звуков, эти схемы преобразователя можно использовать для обнаружения злоумышленников или взломов. Например, если происходит внезапное увеличение частоты, это может указывать на то, что кто-то пытается проникнуть в здание.
Контролируя частоту звуков, эти схемы преобразователя можно использовать для обнаружения злоумышленников или взломов. Например, если происходит внезапное увеличение частоты, это может указывать на то, что кто-то пытается проникнуть в здание.
Использование FVC при обработке звука
Их также можно использовать при обработке звука. Системы обработки звука используют схемы преобразователя частоты в напряжение для преобразования аудиосигналов в пропорциональные выходные напряжения. В системах формирования сигналов используются схемы преобразователя частоты в напряжение для преобразования сигналов перед их отправкой в системы сбора данных. Системы сбора данных используют схемы преобразователя частоты в напряжение для преобразования входных сигналов в цифровые значения, которые могут быть обработаны компьютером.
Использование FVC в тахометрах
Тахометры — это устройства, измеряющие скорость вращения объекта. Они обычно используются в двигателях, где они используются для измерения скорости двигателя. Схемы преобразователя частоты в напряжение используются в тахометрах для преобразования скорости вращения вала двигателя в электрический сигнал, который может отображаться на счетчике.
Схемы преобразователя частоты в напряжение используются в тахометрах для преобразования скорости вращения вала двигателя в электрический сигнал, который может отображаться на счетчике.
Входной сигнал от тахометра обычно представляет собой прямоугольную волну или сигнал импульсов на оборот (PPR). Выходное напряжение преобразователя частоты в напряжение пропорционально частоте входного сигнала.
Схемы преобразователя частоты в напряжение также используются в счетчиках других типов, таких как счетчики воды и газа. В этих приложениях входным сигналом обычно является магниторезистивный датчик или геркон. Выходное напряжение преобразователя частоты в напряжение пропорционально частоте входного сигнала. [2], [3], [4]
Какие преобразователи частоты в напряжение могут получать в качестве входного сигнала
Преобразователи частоты в напряжение могут принимать различные формы входного сигнала. Наиболее распространенным типом входного сигнала является синусоидальная волна, но возможны и другие формы волны. Форма входного сигнала будет влиять на выходное напряжение, поэтому важно понимать, с какими формами сигналов может работать ваш конкретный преобразователь. В общем, однако, вы будете смотреть либо на сигналы переменного, либо на постоянный ток.
Форма входного сигнала будет влиять на выходное напряжение, поэтому важно понимать, с какими формами сигналов может работать ваш конкретный преобразователь. В общем, однако, вы будете смотреть либо на сигналы переменного, либо на постоянный ток.
Сигналы переменного тока — это сигналы, которые чередуют положительное и отрицательное напряжение; другими словами, они не бывают постоянно положительными или постоянно отрицательными. Это вид сигнала, который исходит из вашей настенной розетки дома. С другой стороны, сигналы постоянного тока постоянны; они всегда либо положительные, либо отрицательные (но никогда оба).
Помимо этих двух типов сигналов, вы также можете увидеть ссылки на импульсные сигналы. Это сигналы, которые меняются быстро, но не постоянно. Они могут быть периодическими (что означает, что они происходят через равные промежутки времени) или апериодическими (что означает, что они не происходят через равные промежутки времени).
Помимо импульсов, FVC может получать сигналы от других устройств, таких как микроконтроллеры или датчики. Эти сигналы могут быть цифровыми или аналоговыми. Если вы не уверены, какой тип сигнала может принимать ваш FVC, проверьте техническое описание или поговорите с производителем.
Эти сигналы могут быть цифровыми или аналоговыми. Если вы не уверены, какой тип сигнала может принимать ваш FVC, проверьте техническое описание или поговорите с производителем.
Некоторые устройства поставляются со специальными фильтрами, помогающими игнорировать шум во входном сигнале. Это может быть важно, если вы работаете с очень чувствительным устройством или пытаетесь измерить очень небольшое изменение напряжения. [2], [5], [6]
Основные компоненты схемы преобразователя частоты в напряжение
Основными компонентами схемы преобразователя частоты в напряжение являются усилитель и резисторно-конденсаторная сеть.
Усилитель
Усилитель является первой ступенью схемы преобразователя частоты в напряжение и предназначен для усиления входного сигнала. Затем усиленный сигнал отправляется в резисторно-конденсаторную сеть.
Усилитель, используемый в схеме преобразователя частоты в напряжение, должен иметь высокий коэффициент усиления и низкое входное сопротивление. Наиболее распространенным типом усилителя, используемого в этих схемах, является операционный усилитель или операционный усилитель.
Наиболее распространенным типом усилителя, используемого в этих схемах, является операционный усилитель или операционный усилитель.
Операционные усилители идеально подходят для использования в схемах преобразователей частоты в напряжение, поскольку они имеют очень высокий коэффициент усиления и могут быть легко сконфигурированы как для несимметричных, так и для дифференциальных входов.
Резистивно-емкостные цепи
Резисторно-емкостная цепь, или RC-цепь, предназначена для фильтрации любых нежелательных высокочастотных компонентов из усиленного сигнала, что является ключом к получению точных результатов.
Резистивно-емкостная цепь состоит из двух резисторов и одного конденсатора, соединенных последовательно. Емкость конденсатора выбирается таким образом, чтобы он блокировал высокочастотные сигналы, но пропускал низкочастотные.
Наиболее распространенным типом конденсатора, используемого в RC-цепи, является керамический конденсатор. Керамические конденсаторы идеально подходят для использования в схемах преобразователя частоты в напряжение, поскольку они имеют очень низкий импеданс на высоких частотах.
Все эти компоненты хранятся в виде функциональных блоков в микросхеме FVC. [6], [7]
Как работает схема преобразователя частоты в напряжение
Теперь, когда мы знаем основы схем преобразователя частоты в напряжение, давайте более подробно рассмотрим, как работают эти устройства.
Когда переменный ток протекает через проводник, он создает магнитное поле вокруг проводника. Это магнитное поле будет индуцировать электродвижущую силу в любых близлежащих проводниках. Величина этого индуцированного напряжения пропорциональна скорости изменения магнитного потока, которая, в свою очередь, пропорциональна частоте входного сигнала.
Таким образом, подбирая номиналы индуктивности и конденсатора в цепи, мы можем получить желаемое выходное напряжение, пропорциональное входной частоте. [2]
Примеры схем преобразователя частоты в напряжение
Теперь, когда мы знаем основы работы схемы преобразователя частоты в напряжение, давайте рассмотрим некоторые примеры этих устройств.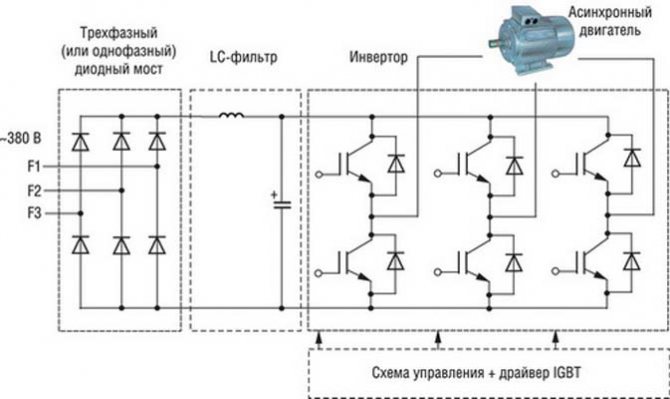
Техник по низкому напряжению и электрик: в чем разница?
IC LM2917
LM2917 представляет собой преобразователь частоты в напряжение, который широко используется во многих приложениях. Этот чип имеет максимальное напряжение питания 28 В и максимальный диапазон входного напряжения 28 В тоже.
LM2917 имеет встроенный входной штифт тахометра, который можно использовать для измерения скорости вращающегося вала и который совместим с большинством магнитных датчиков.
Кроме того, микросхема может удваивать малые пульсации напряжения и имеет низкий выходной импеданс.
Это делает LM2917 идеальным для использования в управлении скоростью двигателя, системах управления двигателем, мониторинге скорости вращения турбины и т.д.
Применение LM2917 включает:
- Управление двигателем
- Робототехника
- Преобразование частоты [1], [9]
IC LM555
Другой популярной микросхемой преобразователя частоты в напряжение является LM555. Этот чип представляет собой точный таймер, который можно использовать для создания точных временных задержек и колебаний. Его также можно использовать как нестабильный или моностабильный мультивибратор.
Этот чип представляет собой точный таймер, который можно использовать для создания точных временных задержек и колебаний. Его также можно использовать как нестабильный или моностабильный мультивибратор.
Микросхема LM555 имеет 8 контактов и может быть легко сконфигурирована для создания схемы FVC. Он широко используется в таких приложениях, как таймеры, сигналы тревоги, генерация импульсов и т. д.
Чтобы использовать эту ИС в качестве преобразователя частоты в напряжение, нам нужно подключить ее в нестабильном режиме. В этом режиме микросхема будет генерировать на выходе прямоугольную волну с рабочим циклом, который можно регулировать с помощью номиналов внешних резисторов и конденсаторов. Выходную частоту LM555 можно рассчитать по следующей формуле:
В вых = V вх x R f x -Ci [4]
IC TC9400
Это обычный преобразователь частоты в напряжение, который используется во многих Приложения. Он имеет широкий диапазон входных частот и может использоваться как для сигналов переменного, так и постоянного тока.
Он отличается низким энергопотреблением и широким диапазоном входного напряжения, что делает его идеальным для устройств с батарейным питанием.
Помимо программируемого коэффициента масштабирования, это делает TC9400 универсальным чипом.
Применение:
- Преобразование сигнала переменного тока в постоянный
- Измерение частоты
- Передача аналоговых данных
- Контроль скорости двигателя чип, вам нужно добавить несколько дополнительных компонентов. Это:
- Операционный усилитель интегратора
- Однократная схема
- Схема управления зарядом-разрядом
- Схема задержки 3 мкс
- Задержка на 2 сети
- Драйверы
Однократная схема создает сигнал широтно-импульсной модуляции.
 Затем этот сигнал подается в схему управления зарядом-разрядом. Затем контролируются заряд и разряд выходного напряжения операционного усилителя интегратора.
Затем этот сигнал подается в схему управления зарядом-разрядом. Затем контролируются заряд и разряд выходного напряжения операционного усилителя интегратора.Цепь управления зарядом-разрядом управляет зарядкой и разрядкой конденсатора. Он управляет выходным напряжением операционного усилителя интегратора.
Выходное напряжение операционного усилителя интегратора затем подается на задержку двумя цепями. Эта сеть задерживает сигнал на два такта.
Наконец, драйверы берут этот задержанный сигнал и преобразуют его в ток, который можно использовать для управления нагрузкой.
Как видите, используя всего несколько дополнительных компонентов, мы можем легко создать преобразователь частоты в напряжение на основе TC9.400. [1], [3], [8]
Часто задаваемые вопросы
Какова основная цель использования преобразователя частоты в напряжение?
Основной целью использования преобразователя частоты в напряжение является преобразование входного сигнала с переменной частотой в выходное напряжение.

Преобразователи частоты в напряжение используются в различных приложениях, таких как преобразование скорости вала двигателя в соответствующее аналоговое напряжение или контроль изменения частоты источника переменного тока (AC).
Они также могут использоваться для более специализированных приложений, таких как обнаружение и измерение очень малых изменений частоты или обеспечение управляющих сигналов для электронных устройств, работающих на определенных частотах.
Как выполняется преобразование частоты?
Преобразование частоты — это процесс преобразования сигнала с одной частоты на другую. Преобразователи частоты можно использовать для изменения частоты сигнала переменного тока или для преобразования переменного тока в постоянный.
Существует несколько способов преобразования частот, но наиболее распространенным является использование трансформатора. Трансформатор — это электрическое устройство, которое использует электромагнитную индукцию для изменения напряжения сигнала переменного тока (AC).
Трансформаторы работают, индуцируя напряжение в проводнике, когда он помещается в переменное магнитное поле. Величина индуцированного напряжения зависит от количества витков в проводнике и скорости изменения магнитного поля.
Как преобразовать импульс в напряжение?
Преобразование импульса в напряжение осуществляется с помощью преобразователя частоты в напряжение для преобразования частоты входного импульса в соответствующее напряжение.
Выходное напряжение преобразователя пропорционально частоте входных импульсов, поэтому, изменяя коэффициент заполнения входных импульсов, можно управлять выходным напряжением.
Однако вам потребуется отрегулировать уровень сигнала, чтобы преобразователь мог точно преобразовывать входные импульсы в напряжение.
Полезное видео: Преобразователи частоты в напряжение и напряжения в частоту
Заключение
Преобразователи частоты являются неотъемлемой частью многих электронных устройств. Преобразуя ток одной частоты в ток другой частоты, они позволяют различным устройствам взаимодействовать друг с другом.
 Это можно сделать внутри одного устройства или внешне между двумя устройствами. Напряжение обычно одинаково до и после преобразования частоты, что делает их эффективным способом изменения сигнала без потери мощности.
Это можно сделать внутри одного устройства или внешне между двумя устройствами. Напряжение обычно одинаково до и после преобразования частоты, что делает их эффективным способом изменения сигнала без потери мощности.В этой статье мы рассмотрели некоторые типы микросхем схемы FVC, а также объяснили наиболее распространенные области их применения. В целом, хотя FVC может показаться простой технологией, они необходимы для современной жизни. Спасибо за прочтение!
[1]. _to_voltage_converters
- https://www.circuitstoday.com/преобразователь частоты в напряжение
- https://www.elprocus.com/преобразователь частоты в напряжение-использование-555-ic/
- https:/ /www.allaboutcircuits.com/video-tutorials/ac-and-dc-signals/
- https://microcontrollerslab.com/frequency-to-voltage-converter-circuits/
- https://www.easytechjunkie.com /what-is-a-frequency-to-voltage-converter.htm
- https://www.mouser.in/new/microchip/microchip-tc9400-vf-converters/
- https://www.
 homemade-circuits.com/frequency-to-voltage-converter-circuit/
homemade-circuits.com/frequency-to-voltage-converter-circuit/ - Широкий диапазон входного напряжения ± 30 В
- Полная частота до 500 кГц
- Высокое входное сопротивление 125 МОм,
- Низкий дрейф (4 мкВ/°C)
- Ток покоя 2,0 мА
- Низкое смещение 1 мВ
- Минимальные требования к внешним компонентам
Arduino Lilypad Projects
Схема преобразователя напряжения в частоту с использованием AD654
Преобразователь напряжения в частоту (VFC) представляет собой генератор, который выдает прямоугольную волну, частота которой линейно пропорциональна его входному напряжению. Выходная прямоугольная волна может быть напрямую подана на цифровой вывод микроконтроллера для точного измерения входного напряжения постоянного тока, что означает, что входное напряжение может быть измерено с помощью 8051 или любого другого микроконтроллера, который не имеет встроенного АЦП.
VFC часто ошибочно принимают за генератор, управляемый напряжением (VCO), но VFC имеют много преимуществ и улучшенных характеристик, которых нет у (VCO), таких как динамический диапазон, низкая ошибка линейности, стабильность при температуре и напряжении питания и многое другое. Наоборот, VFC также возможно означает преобразование частоты в напряжение, что мы уже продемонстрировали в предыдущем уроке.
Здесь IC AD654 используется в этой схеме для демонстрации работы монолитного напряжения на преобразователь частоты. Осциллограф также используется для отображения выходной прямоугольной волны.
IC AD654AD654 представляет собой преобразователь напряжения в частоту IC и поставляется в 8-контактном DIP-корпусе. Он состоит из входного усилителя, очень точного встроенного генератора и сильноточного выходного драйвера с открытым коллектором, который позволяет микросхеме управлять до 12 ТТЛ-нагрузок, оптопар, длинных кабелей или аналогичных нагрузок и может работать в между (5-30) Вольт. Следует также упомянуть, что, в отличие от других ИС, ИС AD654 выдает прямоугольную волну, поэтому микроконтроллеру легко измерить показания. Некоторые из наиболее интересных особенностей этого чипа перечислены ниже.
Характеристики:
| Серийный номер | Детали | Тип | Количество |
| 1 | АД654 | ИЦ | 1 |
| 2 | ЛМ7805 | ИС регулятора напряжения | 1 |
| 3 | 1000 пФ | Конденсатор | 1 |
| 4 | 0,1 мкФ | Конденсатор | 1 |
| 5 | 470 мкФ, 25 В | Конденсатор | 1 903:00 |
| 6 | 10К,1% | Резистор | 4 |
| 7 | Потенциометр, 10K | Переменный резистор | 1 |
| 8 | Блок питания | 12 В постоянного тока | 1 |
| 9 | Проволока одного калибра | Универсальный | 6 |
| 10 | Макет | Универсальный | 1 |
Схема для этой схемы преобразователя напряжения в частоту взята из таблицы данных , и некоторые внешние компоненты были добавлены для модификации схемы для этой демонстрации
Эта схема построена на макетная плата без пайки с компонентами, показанными на схеме, для демонстрационных целей во входную секцию усилителя добавлен потенциометр для изменения входного напряжения, и при этом мы можем наблюдать изменение на выходе.
Внимание! Все компоненты расположены как можно ближе друг к другу, чтобы уменьшить паразитную емкость, индуктивность и сопротивление.
Как работает устройство?Внутренний операционный усилитель используется в качестве входа и предназначен для преобразования входного напряжения в ток возбуждения для повторителя NPN, когда ток возбуждения 1 мА подается на ток преобразователя частоты. Он заряжает внешний времязадающий конденсатор, и эта схема позволяет генератору обеспечивать нелинейность во всем диапазоне напряжений от 100 нА до 2 мА. Этот выход также поступает на выходной драйвер, который представляет собой просто мощный NPN-транзистор с открытым коллектором, из которого мы можем получить выходной сигнал 9.0003
РасчетыДля теоретического расчета выходной частоты схемы можно использовать следующую формулу
Fout = Vin / 10*Rt*Ct
Где
- Fout — выходная частота
- Вин это входное напряжение схемы,
- Rt — резистор для RC-генератора
- Ct – конденсатор для генератора Rc
Например,
- Vin будет 0,1 В или 100 мВ
- Rt это 10000K или 10K
- Ct be 0,001 мкФ или 1000 пФ
Fвых = 0,1/(10*10*0,001) Fout = 1 кГц
Итак, если на вход схемы подать 0,1В , то на выходе получим 1 кГц
Проверка преобразователя напряжения в частотуДля проверки схемы используются следующие инструменты
- Импульсный источник питания 12 В (SMPS)
- Мультиметр Meco 108B+
- USB-осциллограф Hantech 600BE для ПК
Для построения схемы используются 1% металлопленочные резисторы, допуски конденсаторов не учитываются. Во время тестирования температура в помещении составляла 22 градуса Цельсия
Во время тестирования температура в помещении составляла 22 градуса Цельсия
Установка для тестирования
Как вы можете видеть, входное напряжение постоянного тока составляет 11,73 В
А напряжение на входе микросхемы составляет 104,8 мВ
Здесь вы можете увидеть вывод на моем D SO составляет 1,045 кГц.
Подробное видео рабочей схемы приведено ниже, где было задано несколько входов, а частота изменилась пропорционально входному напряжению.
Дальнейшее усовершенствование Создав схему на печатной плате, можно повысить стабильность, а также можно использовать резисторы и конденсаторы с допуском 0,5% для повышения точности. Наиболее важной частью этой схемы является секция RC-генератора, поэтому RC-генератор должен быть размещен как можно ближе к входным контактам, иначе начальная емкость и сопротивление дорожек печатной платы или компонента могут снизить точность схемы.