
Простой драйвер шагового двигателя | 2 Схемы
Оглавление:
Предлагается 2 варианта схем простейших драйверов шаговых моторов, реально рабочих, так как информация взята из зарубежных радиоконструкторов (ссылка на оригиналы в конце статьи).
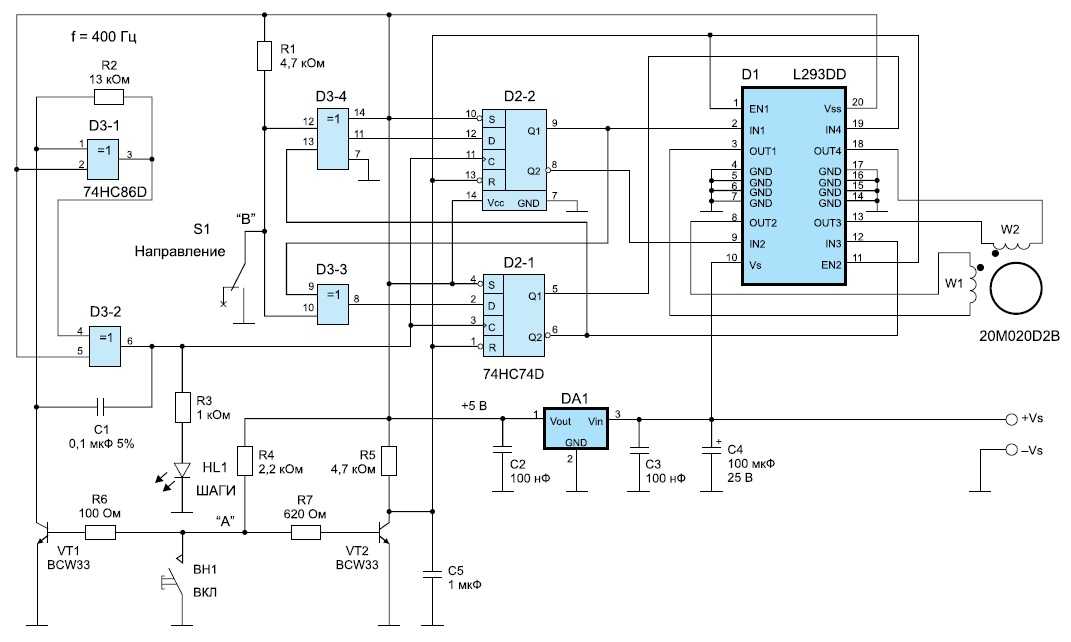
Схема драйвера шагового двигателя
Схема драйвера шагового двигателя не содержит дорогих деталей и программируемых контроллеров. Работа может регулироваться в широком диапазоне с помощью потенциометра PR1. Есть изменение направления вращения двигателя. Катушки шагового двигателя переключаются с помощью четырех МОП-транзисторов T1-T4. Применение в блоке транзисторов большой мощности типа BUZ10 позволит подключить двигатели даже с очень большим током.
Особенности схемы и детали
- управление четырехфазным шаговым двигателем
- плавная регулировка скорости вращения в пределах всего диапазона
- изменение направления вращения мотора
- возможная остановка двигателя
- блок питания 12 В постоянного тока
Детали – IC1: 4070, IC2: 4093, IC3: 4027, T1-T4: BUZ10, BUZ11
Блок драйвер шагового двигателя собран на печатной плате, показанной на рисунке. Монтируем, как правило, начиная с припайки резисторов и панелек для интегральных микросхем, а под конец электролитические конденсаторы и транзисторы большой мощности.
Монтируем, как правило, начиная с припайки резисторов и панелек для интегральных микросхем, а под конец электролитические конденсаторы и транзисторы большой мощности.
Блок, собранный из проверенных компонентов, не требует настройки и запускается сразу после подачи питания. Со значениями элементов, указанными на схеме, позволяет работать двигателю 5,25” и выполняет изменение скорости вращения в интервале от 40 об./мин. до 5 об./мин.
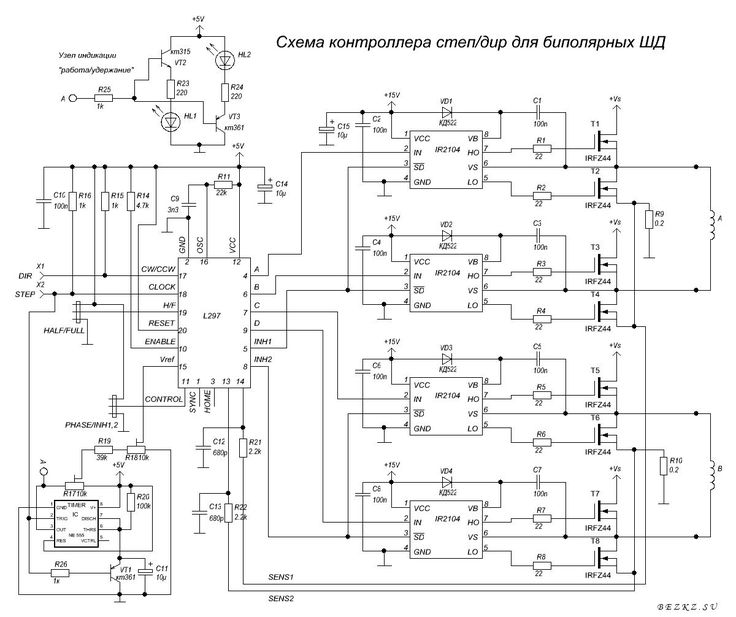
Биполярный контроллер шаговых двигателей
Схема представляет собой дешевую, и прежде всего легко собираемую альтернативу доступным микропроцессорным биполярным контроллерам шаговых двигателей. Рекомендуется там, где точность управления играет меньшую роль, чем цена и надежность.
Принципиальную схему можно разделить на следующие блоки:
- последовательный чип, генерирующий битовые строки,
- локальный генератор тактового сигнала,
- схема управления питанием катушек,
- выходные буферы Н-моста,
- схемы защиты входных сигналов управления.

Контроллер должен питаться постоянным напряжением, хорошо отфильтрованным, желательно стабилизированным.
Теперь пару слов про H-мосты, которые будут работать с этим драйвером. Они должны принимать на своих входах все возможные логические состояния (00, 01, 10, 11), без риска какого-либо повреждения. Просто в некоторых конфигурациях мостов построенных из дискретных элементов, запрещается одновременное включение двух входов – их естественно нельзя использовать с этим контроллером. Мосты выполненные в виде интегральных микросхем (например L293, L298), устойчивы к этому.
И в завершение третий вариант контроллера, на микросхемах STK672-440, имеющий все необходимые защиты и функции смотрите по ссылке.
- Скачать описание на простой драйвер шагового двигателя
- Скачать описание на биполярный контроллер шаговых моторов
Схема драйвера шагового двигателя TB6560
Автор Steel.ne. Материал с форума cnc-club.ru
Внимание! Микросхемы Toshiba TB6560 – устарели.
 В 2013 г. их выпуск будет прекращен, и вместо них будут выпускаться микросхемы THB6064 и TB6600.Микросхема Toshiba TB6560
В 2013 г. их выпуск будет прекращен, и вместо них будут выпускаться микросхемы THB6064 и TB6600.Микросхема Toshiba TB6560
Это драйвер биполярных шаговых двигателей. На входе управление STEP-DIR, то есть одним пином задается направление вращения, второй пин отсчитывает шаги. Есть возможность использовать микрошаг и некоторые регулировки рабочего тока. Работает до напряжения 40В, выдать может ток до 3.5А. Все. Никакой отдельной регулировки тока удержания, минимум защит.
Регулировки
Все регулировки выполняются или внешними элементами (резисторами и конденсаторами) или установкой логических уровней на определенных ногах.
1. Установка номинального тока. Регулируется резисторами на ногах 14 и 11 соответственно для обмотки A и B. Включается в разрыв земли моста. С одной стороны — упрощается внутренняя схемотехника (измерение напряжения относительно земли несколько проще), с другой стороны — любой ток, текущий на землю мимо этого резистора не учитывается и приводит к вылетанию транзисторов. К этому вернемся в разделе «Надежность». Поскольку через этот резистор течет весь рабочий ток, то на нем может выделяться до двух ватт тепла. Не забыть про это!
К этому вернемся в разделе «Надежность». Поскольку через этот резистор течет весь рабочий ток, то на нем может выделяться до двух ватт тепла. Не забыть про это!
2. Установка рабочего тока. Имеется четыре комбинации, в зависимости от уровней на ножках TQ1 и TQ2 (2 и 1 соответственно). Часто на них ставят джамперы или микропереключатели. Возможны варианты 100%, 75%, 50%, 20% от номинального. Иногда эту группу пинов обзывают Torque control.
3. Частота работы ШИМ (PWM). На самом деле регулировка тока производится отсечкой по достижении установленного значения (chopper-type PWM). Но тем не менее включение и выключение ключей происходит с некоторой частотой, которая, собственно, и задается внешним конденсатором.
4. Режимы микрошага. Выставляются комбинацией уровне на ногах M1 и M2. Возможны варианты – шаг, полушаг, 1/8 шага и 1/16 шага за один импульс STEP. Диаграммы токов, что будут на обмотках, можно глянуть в даташите. Не забываем, что чем мельче шаг, тем меньше усилие на валу двигателя.
5. Decay mode – режим гашения тока. Выставляется, как и рабочий ток, уровнями на ножках Dcy1 и Dcy2 (25 и 24 соответственно). В чем его пафос? Когда ток в обмотке достиг нужного уровня, то ключи моста закрываются. При этом, поскольку обмотка двигателя обладает значительной индуктивностью, ток в обмотке никуда не девается и ищет выход. По умолчанию он рассасывается через паразитные диоды ключей и через внешние диоды, которые обычно ставят для защиты от индуктивных скачков напряжения. Когда мы работаем в режиме шага или полушага, проблем от этого обычно не возникает. Ну рассасывается и ладно. Все равно при следующем шаге подадим обратное напряжение, все нормализуется. А вот в режиме микрошага, нам надо точно соблюдать соотношение токов в обмотках. И может получиться, что ток в обмотках будет спадать не так быстро, как нам надо. Некоторые до 1-2 тысячи шагов в секунду двигатели гоняют. И тут нам на помощь приходит принудительное гашение тока.
Посмотрим на режимы работы транзисторов в мосту:
Charge mode – рабочий режим. Мост открыт, ток в обмотке растет.
Мост открыт, ток в обмотке растет.
Slow mode – когда произошла отсечка по току, то открываются два нижних транзистора. Чтобы было куда деваться току из обмотки. Паразитные диоды в транзисторах обладают неважными характеристиками, поэтому чтобы их не перегружать, открывают транзисторы, которые уже более продуктивно пропускают через себя ток. Катушка получается фактически замкнута сама на себя.
Fast mode – в этом режиме на катушку подается обратное напряжение. В этом случае ток гасится максимально эффективно.
Все эти пляски происходят с частотой ШИМ, то есть Charge-Slow-Fast и опять по кругу. Так вот, настройки decoy mode и определяют, когда включится Fast режим. При установке Slow mode он не используется вообще, при увеличении процентов — включается все ранее.
Смотрим на картинку:
Один период управления ШИМ происходит в течение четырех тактов управляющего генератора (частота которого, как мы помним, задается внешним конденсатором). Соответственно fast mode либо не используется, либо включается в последнем такте (25%), либо в двух последних (50%) или сразу (100%) по достижении установленного тока.
Соответственно fast mode либо не используется, либо включается в последнем такте (25%), либо в двух последних (50%) или сразу (100%) по достижении установленного тока.
Никакого анализа, нужен шаг в этот момент или не нужен не происходит. И эти качели происходят всегда, даже когда двигатель стоит. При этом возникают пульсации тока в обмотке, что вызывает повышенный писк двигателей на частоте управления ШИМ.
Когда надо включать этот режим? Когда двигатели имеют большую индуктивность и требуется высокая скорость микрошага. В остальных случаях он бесполезен.
Надежность.
Эти драйверы не прощают ошибок. Если хотя бы один провод двигателя замкнется на землю – вылетают со спецэффектами. Это происходит как раз потому, что токоизмерительные резисторы включены в разрыв земли, и любой ток, не проходящий через этот резистор не учитывается, что приводит к моментальному выходу из строя верхних транзисторов.
 При этом ток через транзистор обмотки А потечет через резистор обмотки В, что также приведет к выгоранию. Очень критичен порядок подачи питающих напряжений — сначала низкое (5 вольт на питание логики) и только потом — высокое (на питание двигателей). На последних платах с этим драйвером я даже заметил отдельные стабилизаторы 5вольт для каждого драйвера, что практически исключает отсутствие низкого напряжения при начале работы. Включать драйвера без подключения двигателя можно, проблем не будет. Крутить двигатели при отсутствии питания драйверов — запрещено. Двигатели вполне могут создать напряжение выше допустимых 40 вольт. При нормальной работе напряжение самоиндукции утилизируется источником питания или демпферными схемами. При отключенном источнике питания — только пробитыми транзисторами.
При этом ток через транзистор обмотки А потечет через резистор обмотки В, что также приведет к выгоранию. Очень критичен порядок подачи питающих напряжений — сначала низкое (5 вольт на питание логики) и только потом — высокое (на питание двигателей). На последних платах с этим драйвером я даже заметил отдельные стабилизаторы 5вольт для каждого драйвера, что практически исключает отсутствие низкого напряжения при начале работы. Включать драйвера без подключения двигателя можно, проблем не будет. Крутить двигатели при отсутствии питания драйверов — запрещено. Двигатели вполне могут создать напряжение выше допустимых 40 вольт. При нормальной работе напряжение самоиндукции утилизируется источником питания или демпферными схемами. При отключенном источнике питания — только пробитыми транзисторами.Схема драйвера шагового двигателя — ElectronicsHub
Краткое описание
Введение
Драйвер шагового двигателя представляет собой схему или устройство, которое обеспечивает необходимый ток и напряжение для шагового двигателя, чтобы он работал плавно. Шаговый двигатель — это тип двигателя постоянного тока, который вращается ступенчато.
Шаговый двигатель — это тип двигателя постоянного тока, который вращается ступенчато.
Основное различие между простым двигателем постоянного тока и шаговым двигателем заключается в том, что с помощью шагового двигателя мы можем добиться точного позиционирования с помощью цифрового управления.
Шаговый двигатель вращается точно за счет синхронизации импульсных сигналов от контроллера, которые подаются через драйвер. Драйвер шагового двигателя — это схема, которая принимает импульсные сигналы от контроллера и преобразует их в движение шагового двигателя.
В этом проекте мы разработали простую схему драйвера шагового двигателя на 12 В, используя микросхему таймера 555 (действующую как контроллер), счетчик декад CD4017 (действующий как драйвер) вместе с несколькими другими компонентами.
Принципиальная схема
Необходимые компоненты
- 555 Таймер IC
- CD4017 Декадный счетчик Джонсона (10 декодированных выходов)
- 4 транзистора 2N2222 NPN
- 4 соединительных диода 1N4007 PN
- 4 резистора по 1 кОм (1/4 Вт)
- Резистор 2,2 кОм (1/4 Вт)
- Резистор 470 Ом (1/4 Вт)
- Потенциометр 100 кОм (ручка)
- Керамический дисковый конденсатор 100 пФ (код — 101) (также читается как 0,1 нФ)
- 1 мкФ, 16 В, поляризованный конденсатор
- Шаговый двигатель 12 В (униполярный, 5 проводов)
- Соединительные провода
- Макетная плата (макетная плата)
- Блок питания 12 В
Компонент Описание
555 ИС таймера
IC 555 — очень известная ИС таймера, которая часто используется для временных задержек, генерации импульсов и многих приложений генератора.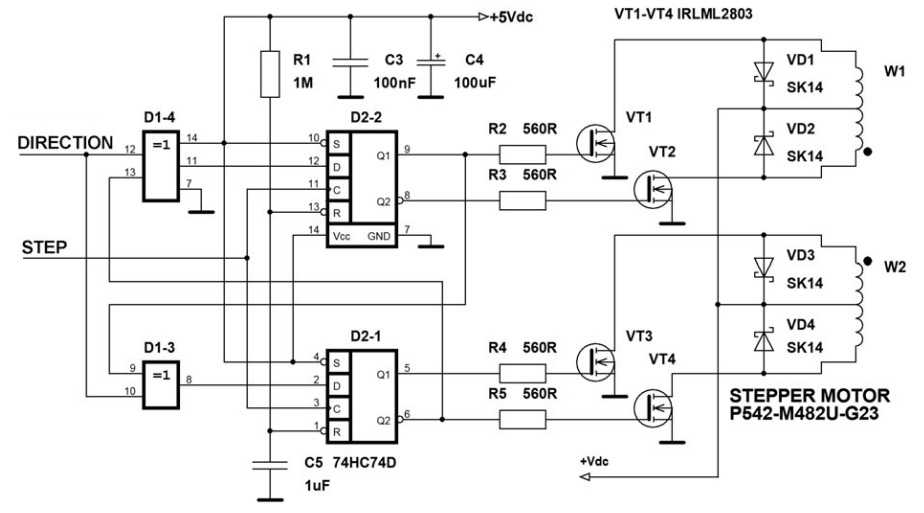 IC 555 имеет три режима работы, а именно нестабильный мультивибратор (генератор импульсов), моностабильный мультивибратор (временные задержки) и бистабильный мультивибратор (флип-флоп). В этом проекте мы использовали эту микросхему 555 для генерации импульса, т.е. в нестабильном режиме работы.
IC 555 имеет три режима работы, а именно нестабильный мультивибратор (генератор импульсов), моностабильный мультивибратор (временные задержки) и бистабильный мультивибратор (флип-флоп). В этом проекте мы использовали эту микросхему 555 для генерации импульса, т.е. в нестабильном режиме работы.
CD4017 ИС счетчика декад
CD4017 представляет собой ИС счетчика, которая производит 10 декодированных выходов и, следовательно, счетчик декад. Эти счетчики часто используются в дисплеях, операциях деления частоты, двоичных счетчиках и т. д.
Но в этом проекте мы используем микросхему счетчика CD4017 в качестве драйвера шагового двигателя. И, следовательно, эта схема драйвера шагового двигателя по сути является схемой двоичного счетчика.
Шаговый двигатель
В этом проекте используется шаговый двигатель 12 В. Это шаговый двигатель униполярного типа с 5-проводной конфигурацией. В основном, шаговые двигатели классифицируются на униполярные шаговые двигатели и биполярные шаговые двигатели, основанные на обмотках статора. На следующем изображении показан биполярный шаговый двигатель с его обмоткой.
На следующем изображении показан биполярный шаговый двигатель с его обмоткой.
Схема драйвера для униполярного шагового двигателя может быть построена с помощью нескольких транзисторов или микросхемы на транзисторе Дарлингтона, такой как ULN2003.
Но для схемы драйвера биполярного шагового двигателя требуется соединение по типу Н-мост. Следовательно, мы используем микросхемы H-моста, такие как L293D, для управления биполярными шаговыми двигателями.
Схема
Мы начнем с генератора прямоугольных импульсов, т.е. 555 IC в нестабильном режиме. Резистор 2,2 кОм подключен между VCC и выводом разрядки 555 (вывод 7).
Потенциометр на 100 кОм подключается между выводом разрядки (вывод 7) и выводом порога (вывод 6), который, в свою очередь, замыкается на контакт триггера (вывод 2).
Конденсатор емкостью 1 мкФ подключается между выводом триггера (вывод 2) и заземлением. Байпасный конденсатор емкостью 100 пФ подключен к выводу управляющего напряжения (вывод 5). Другие контакты, то есть VCC (контакт 8), подключены к источнику питания 12 В, контакт сброса (контакт 4) к источнику питания 12 В, а контакт заземления (контакт 1) к GND.
Другие контакты, то есть VCC (контакт 8), подключены к источнику питания 12 В, контакт сброса (контакт 4) к источнику питания 12 В, а контакт заземления (контакт 1) к GND.
Выход микросхемы таймера 555, т. е. контакт 3, используется как тактовый вход для микросхемы счетчика CD4017, т. е. ее 14-го контакта. Контакты VDD и VSS CD4017, то есть контакты 16 и 8, подключены к источнику питания 12 В и заземлению соответственно. Контакт включения (контакт 13) подключен к земле.
Нам нужно контролировать 4 клеммы двух катушек шагового двигателя. Следовательно, нам нужно всего 4 выхода от драйвера. Эти выходы от Q0 до Q3, т.е. контакты 3, 2, 4 и 7 соответственно. Выходы счетчика подключены к базовым выводам 4-х транзисторов через отдельные резисторы 1 кОм.
Счетчик должен сбрасываться при пятом импульсе и, следовательно, Q4 (вывод 10), который ни что иное, как пятый выход, подключен к выводу сброса CD4017, т.е. к выводу 15, и этот вывод подключен к GND через резистор 470 Ом.
Шаговый двигатель униполярного типа с 5-проводной конфигурацией. Центральный контакт закорочен внутри и подключен к источнику питания (здесь 12 В).
Остальные 4 вывода шагового двигателя являются концами двух катушек. Они должны быть подключены к выводам коллектора четырех транзисторов.
Важно, чтобы они были подключены в порядке срабатывания выходов. Наконец, четыре диода подключены между клеммами коллектора и питания. Диоды очень важны, так как они защищают транзисторы от индуктивных выбросов.
Работа схемы драйвера шагового двигателя
Работа этой схемы драйвера шагового двигателя очень проста. Мы увидим пошаговое рабочее объяснение. Во-первых, микросхема таймера 555 сконфигурирована как нестабильный мультивибратор, т. е. действует как генератор прямоугольных импульсов.
В зависимости от положения потенциометра частота прямоугольной волны будет варьироваться от 7 Гц до 340 Гц.
Этот прямоугольный импульс подается на микросхему счетчика CD4017 в качестве входного сигнала тактового сигнала. Для каждого положительного перехода тактового сигнала, т. е. перехода с низкого уровня на высокий, выход счетчика увеличивается на один счет.
Для каждого положительного перехода тактового сигнала, т. е. перехода с низкого уровня на высокий, выход счетчика увеличивается на один счет.
Для первого положительного перехода на тактовой частоте Q0 будет высоким, для второго положительного перехода Q1 будет высоким и так далее.
Поскольку нам нужно только 4 выхода, пятый выход, т.е. Q4, подключается к контакту Reset, так что счетчик сбрасывается и счет начинается снова.
Выходы микросхемы счетчика CD4017 подключены к 4 различным транзисторам, которые, в свою очередь, подключены к 4 выводам катушки шагового двигателя. Мы можем лучше понять это из следующей диаграммы.
Предположим, что точки A, B, C и D являются контактами катушек, подключенных к транзисторам. Общий провод в шаговом двигателе подается на питание 12В.
Когда на CD4017 подается первый тактовый сигнал, Q0 становится ВЫСОКИМ. Это включит соответствующий транзистор.
В результате питание от общего провода идет через точку А на землю. Это возбуждает катушку и действует как электромагнит. Ротор притянется и повернется в это положение.
Это возбуждает катушку и действует как электромагнит. Ротор притянется и повернется в это положение.
Во время второго тактового импульса выход Q1 становится ВЫСОКИМ, и в результате связанный с ним транзистор включается. Теперь ток течет от общего провода к GND через точку B.
Следовательно, эта катушка будет под напряжением и превратится в электромагнит. Это приведет к дальнейшему вращению ротора. Этот процесс продолжается и в зависимости от частоты тактового сигнала изменяется скорость вращения шагового двигателя.
Преимущества
- Самодельный драйвер шагового двигателя предназначен для управления униполярными шаговыми двигателями.
- Используя этот драйвер шагового двигателя, мы можем избежать дорогостоящих специализированных плат драйвера шагового двигателя.
Недостатки
- Эта конструкция неэффективна.
- Требуется много сложной проводки для небольшого приложения.
Видео построения и вывода
Схема драйвера шагового двигателя
от Shagufta Shahjahan
12,295 просмотровЦепь двоичного счетчика декад теоретически является схемой привода двигателя. Преимущества этой схемы в том, что ее можно использовать для работы 2-10-шаговых шаговых двигателей. Давайте поговорим об основах шагового двигателя, прежде чем двигаться дальше.
Шаговый двигатель не работает от постоянного источника питания. Только регулируемые и упорядоченные импульсы мощности могут привести его в действие. Мы должны обсудить УНИПОЛЯРНЫЕ и БИПОЛЯРНЫЕ шаговые двигатели, прежде чем идти дальше. Мы можем взять центр, отводящий все обмотки для общей местности или общей мощности, как это видно в ОДНОПОЛЯРНОМ шаговом двигателе.
Купить на Amazon
Аппаратные компоненты
Следующие компоненты необходимы для изготовления схемы драйвера шагового двигателя 170
Распиновка микросхемы NE555
Для получения подробного описания схемы выводов, размеров и технических характеристик загрузите техническое описание микросхемы NE555.
Схема работы
На рисунке показана принципиальная схема двухкаскадного драйвера шагового двигателя. ИС таймера 555 теперь производит часы или прямоугольную волну, как показано на принципиальной схеме. В этом случае тактовая частота не может постоянно поддерживаться, поэтому шаговый двигатель должен иметь переменную скорость вращения.
Потенциометр или пресет с резистором 1 кОм в ответвлении между 6-м и 7-м контактами задается для достижения этой переменной скорости. Сопротивление меняется в зависимости от горшка, поэтому 555 изменений в ответвлении дают тактовую частоту.
На рисунке важна только третья формула. Вы можете видеть, что частота обратно пропорциональна R2, что составляет 1 K + 220 K POT в цепи. Таким образом, увеличение R2 вызывает снижение частоты. И затем частота уменьшается, если горшок меняется, чтобы увеличить сопротивление ветви.
Счетчик DECADE BINARY поставляется вместе с часами, созданными микросхемой таймера 555. Двоичный счетчик теперь подсчитывает количество импульсов, подаваемых на часы, и формирует высокий вывод для соответствующего вывода.
