
Энкодер подключение
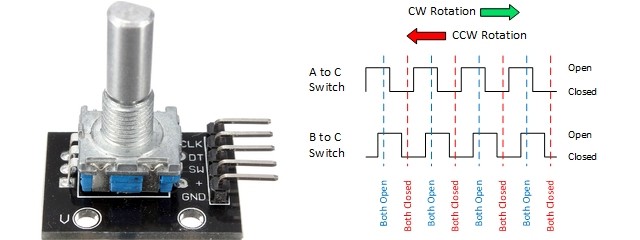
Описание работы енкодера Поворотный энкодер имеет фиксированное число позиций на оборот. Эти позиции легко ощущаются руками как небольшие щелчки при повороте оси энкодера. Данный модуль энкодера имеет тридцать таких позиций. Количество таких позиций характеризует чувствительность датчика вращения. У отдельного датчика имеются три вывода.
Поиск данных по Вашему запросу:
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.
По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- Как подключить абсолютный энкодер. Подключение энкодера к микроконтроллеру
- Подключение энкодера к микроконтроллеру
- Arduino UNO урок 6 – Энкодер
Подключение энкодера к микроконтроллеру - Подключение инкрементального энкодера к микроконтроллеру.
- Подключение к ардуино датчика вращения енкодер KY-040
- Главное меню
- Энкодер. Подключение. Часть 10.
- Подключение инкрементального энкодера к микроконтроллеру.

ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: Полный мануал: Инкрементальный энкодер EC11 + Arduino и не только
Как подключить абсолютный энкодер. Подключение энкодера к микроконтроллеру
Инкрементальный энкодер представляет собой механическое устройство датчик преобразующее угол поворота вала ручки в электрические сигналы. Энкодер имеет три вывода, или пять в зависимости от наличия встроенной кнопки.
На один полный оборот ручки может приходиться различное количество дискретных положений 12, 20, 24 , в зависимости от модели энкодера. На рисунке ниже представлена функциональная схема поясняющие принцип действия энкодера. Сдвиг фаз зависит от направления вращения. Состояние энкодера можно определить используя прерывания по изменению сигнала на выводах микроконтроллера или путем периодического опроса через равные промежутки времени, сравнивая текущее состояние с предыдущим сохраненным значением.
Сначала рассмотрим вариант периодического опроса. Ниже представлен код программы, в которой реализован периодический опрос состояния выводов энкодера. Опрос состояний выводов А и B энкодера выполняется в подпрограмме обработки прерываний, которая периодически вызывается по переполнению таймера TMR0 см.
Организация временной задержки. В моем варианте таймер переполняется примерно через 1 мс, то есть энкодер опрашивается каждую миллисекунду. Внутри обработчика прерываний сначала сохраняется текущее состояние выводов энкодера, для этого используется дополнительный регистр flag, содержимое которого всегда перед выходом из обработчика сдвигается влево на два бита, таким образом сохраняется предыдущее состояние выводов энкодера.
В моем варианте таймер переполняется примерно через 1 мс, то есть энкодер опрашивается каждую миллисекунду. Внутри обработчика прерываний сначала сохраняется текущее состояние выводов энкодера, для этого используется дополнительный регистр flag, содержимое которого всегда перед выходом из обработчика сдвигается влево на два бита, таким образом сохраняется предыдущее состояние выводов энкодера.
После сохранения текущего состояния в 0-й и 1-й бит регистра flag, осуществляется проверка предыдущего состояния, то есть анализируются 2-й и 3-й биты. Алгоритм следующий: если предыдущее состояние обоих выводов соответствовало логической единице, проверяем текущее сохраненное значение биты 0,1 регистра flag , если значение битов равно 0 и 1, произошел поворот в одну сторону, если значение равно 1 и 0, произошел поворот в противоположную сторону. После определения факта поворота происходит инкремент или декремент регистра shet, содержимое которого число от 0 до в основной программе выводится на семисегментные индикаторы.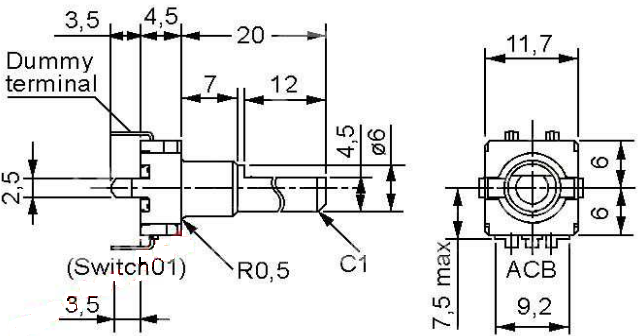
Инкремент производится до числа и ограничивается на этом значении, даже при дальнейшем повороте ручки энкодера, то же самое и при декременте до 0. Если предыдущее состояние обоих выводов не соответствует 1, просто выходим из обработчика, также смещая содержимое регистра flag влево.
Это необходимо чтобы пропустить все остальные возможные состояния выводов энкодера, то есть для определения направления вращения используется половина периода одного дискретного изменения два состояния из четырех возможных. То есть после инкремента регистра shet происходил декремент и наоборот. При последующих входах в обработчик, после проверки предыдущего состояния и соответствия выводов энкодера высокому логическому уровню, по установленному флагу в регистре flag1 происходит инкремент регистра shet1.
Если его содержимое не равно числу 3 происходит выход из обработчика. Таким образом, после факта поворота, следующее определение состояния энкодера будет выполняться, при условии трехкратной фиксации высоких логических уровней на выводах энкодера, после чего регистр shet1 обнуляется и сбрасывается флаг регистра flag1.
После изменения значения регистра shet в обработчике прерываний, дополнительно устанавливается флаг регистрации поворота энкодера flag1,1, который опрашивается в основной программе, если флаг установлен вызывается подпрограмма vivod, для вывода содержимого регистра shet на семисегментные индикаторы. Теперь рассмотрим программу опроса энкодера основанную на прерываниях по изменению уровня на входах микроконтроллера:.
Линии RB6, RB7 настроены на выход, чтобы не вызывать ложных прерываний, так как в данном микроконтроллере нельзя разрешать прерывания по отдельности на каждую линию. В обработчике прерываний происходит сохранение текущих состояний выводов энкодера в 0-й и 1-й биты регистра flag, далее идет проверка сохраненных значений, если биты 0 и 1 равны нулю, происходит переход на метку i2, где проверяется предыдущее состояние выводов энкодера записанных в биты 2 и 3 регистра flag.
Если значение битов равно 0 и 1 произошел поворот в одну сторону, если 1 и 0 в другую сторону, состояние и игнорируется, в этом случае происходит выход из обработчика прерываний. После определения факта поворота происходит изменение значения счетчика shet, а также установка флага регистрации поворота энкодера flag1,0. Этот флаг опрашивается в основной программе, и если равен единице вызывается подпрограмма vivod, для вывода содержимого регистра shet на семисегментные индикаторы.
После определения факта поворота происходит изменение значения счетчика shet, а также установка флага регистрации поворота энкодера flag1,0. Этот флаг опрашивается в основной программе, и если равен единице вызывается подпрограмма vivod, для вывода содержимого регистра shet на семисегментные индикаторы.
Для лучшей стабильности реализовано игнорирование состояний выводов энкодера после определения факта поворота. То есть после изменения значения регистра shet, устанавливается флаг готовности flag1,1.
Состояние выводов игнорируется до момента, когда оба вывода не установятся в единицу, то есть по окончанию периода одного дискретного изменения.
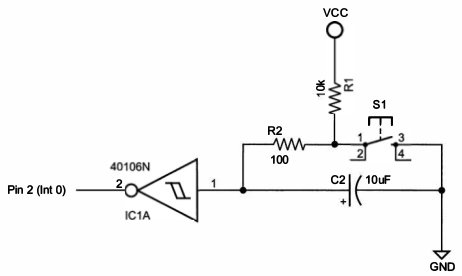
Как только значение обоих выводов будут равны единице, флаг готовности будет сброшен, и разрешен дальнейший анализ состояний выводов энкодера. Важное значение имеет наличие конденсаторов на выводах энкодера, которые уменьшают дребезг контактов, улучшая работоспособность данной программы.
Вышеприведенные программы тестировались на микроконтроллере PIC16FA, тактовый генератор внутренний на 4 МГц, энкодер на 20 дискретных положений.
Не могу написать подпрограмму вывода регистра на семисегментный индикатор, если есть у кого, выложите, пожалуйста. Асинхронному двигателю нельзя задавать определенный угол поворота, асинхронный двигатель просто вращается, можно регулировать только частоту вращения.
Может вы имели в виду сервопривод? Ну задача такова, что у меня имеется двигатель с редуктором, который в свою очередь должен контролировать положение мембраны в газовом редукторе.
Ну в таком случае с асинхронным двигателем на выходе редуктора на мембране надо ставить датчик положения потенциометр, переменный резистор чтобы отслеживать угол поворота, у обычного переменного резистора диапазон поворота около градусов, то есть мембрана будет поворачиваться только в этом диапазоне не более град.
Без датчика положения обратной связи нельзя будет узнать положение. Аналог посоветовать не могу, так как не встречался с такими регуляторами. Я вижу этот регулятор так: ставим на мембрану переменный резистор который подключается к АЦП микроконтроллера, для отображения угла поворота подключаем дисплей к микроконтроллеру, с помощью энкодера выставляем нужный угол на дисплее, далее микроконтроллер включает один из двух пускателей для запуска асинхронного двигателя, в соответствии с направлением поворота, и исходя из показаний АЦП, следит за углом и отключает двигатель по достижении нужного угла.
Аналог посоветовать не могу, так как не встречался с такими регуляторами. Я вижу этот регулятор так: ставим на мембрану переменный резистор который подключается к АЦП микроконтроллера, для отображения угла поворота подключаем дисплей к микроконтроллеру, с помощью энкодера выставляем нужный угол на дисплее, далее микроконтроллер включает один из двух пускателей для запуска асинхронного двигателя, в соответствии с направлением поворота, и исходя из показаний АЦП, следит за углом и отключает двигатель по достижении нужного угла.
Энкодер выступает здесь в роли устройства ввода данных число в микроконтроллер. Ну вообще тут могут быть разные варианты управления, например на дисплей выводить текущий угол с датчика положения, а вращая энкодер добиваться нужного угла. Xотел спросить можна переделать немного програму штоб она не изменяла регистр shet, а изменяла логические уровни на двух выводах имитацыя кнопок.
Здравствуйте, поменять можно как угодно, вы не уточнили как именно, например в случае инкремента что должно происходить, если изменение уровня на выводе, то какой уровень выставлять, и что делать при следующем инкременте? Пишите конкретнее.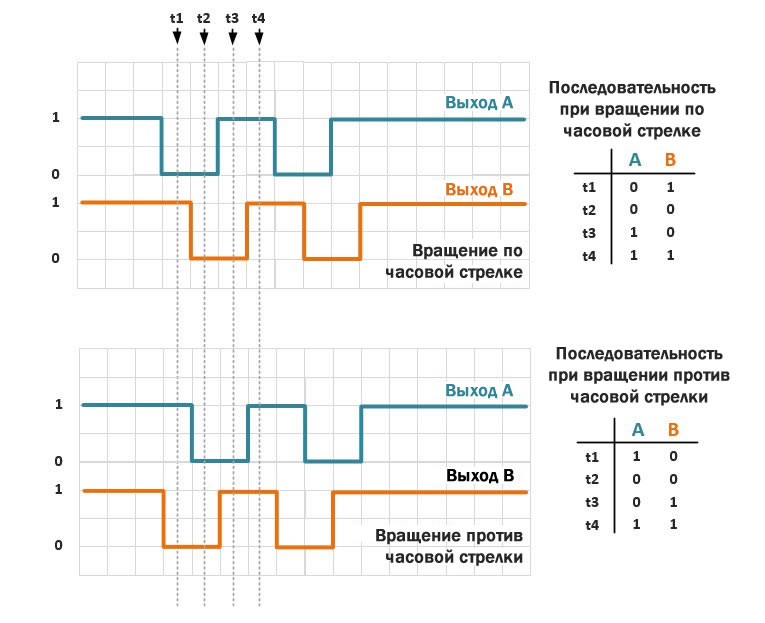 Имитацыя работы кнопок когда нет возможности изменить програму. Надо имитировать две кнопки плюс и минус чтоб если крутыш в одну сторону на одном выходе логический ноль крутиш в другую на втором выводе анагогично.
Имитацыя работы кнопок когда нет возможности изменить програму. Надо имитировать две кнопки плюс и минус чтоб если крутыш в одну сторону на одном выходе логический ноль крутиш в другую на втором выводе анагогично.
Кнопка может иметь 2 состояния, нажата и отжата, соответственно получаем два логических уровня низкий и высокий. Ладно если произошел инкремент, ставим низкий уровень на выводе, а что дальше, так и оставляем низкий уровень? То есть по вашему получаем имитацию нажатия кнопки, а имитация отжатия в каком случае должна происходить, при следующем инкременте?
Огромное спасибо. Здравствуйте, а для чего в программе в строке подпрограмма program? В Протеусе работает , хочу перенести на 12f чтоб вышло компактное устройство, которое можно подключить к уже готовому устройству на кнопках.
Подпрограмму program я условно указал, например, если еще какое то действие нужно выполнить по повороту энкодера, но в вашем случае как я понял это не нужно, можете убрать этот код, но в основной программе все равно надо что-то делать, или просто бесконечный круговой цикл поставить.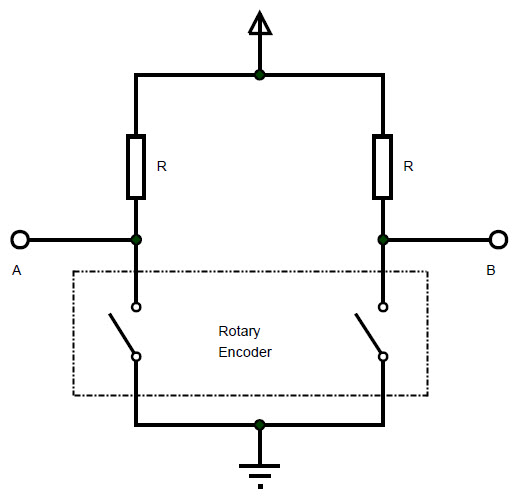 Спасибо в протеусе работает буду делать теперь в железе, если интересно то потом могу скинуть печатную плату и фото устройства может у вас получится статья.
Спасибо в протеусе работает буду делать теперь в железе, если интересно то потом могу скинуть печатную плату и фото устройства может у вас получится статья.
Ваш e-mail не будет опубликован. Оповещать о новых комментариях по почте:. Может кто посоветовать схему управления асинхронным двигателем на микроконтроллере с энкодером? А энкодер какую роль должен выполнять? Как именно должен управляться двигатель? А можете какой нибудь аналог схемы посоветовать, буду очень благодарен! Hi There, Can you please write the code under MikroC and share here.
Thanks, Leem. Да должна как обычная кнопка нажали отпустили еслы надо ещо нажали отпустили. Чет туго у меня с переводом на Я думаю что проблема с конфигурацией битов. Выложите, пожалуйста, исходный код для вашего устройства с экодером из видео. Добавить комментарий Отменить ответ Ваш e-mail не будет опубликован.
Подключение энкодера к микроконтроллеру
Правильно делаете, что пробуете разные значения. У меня таких энкодеров 5 штук, одни ужасно шумят, другие получше. Заметил, что энкодеры без кнопок дребезжат значительно меньше по сравнению с этим KY Поэтому лучший вариант – это протестировать работу энкодера с разными значениями частоты опроса. Значит у вас в мониторе порта была выбрана скорость
Заметил, что энкодеры без кнопок дребезжат значительно меньше по сравнению с этим KY Поэтому лучший вариант – это протестировать работу энкодера с разными значениями частоты опроса. Значит у вас в мониторе порта была выбрана скорость
Подключение инкрементального энкодера к микроконтроллеру. Инкрементальный энкодер внешне похож на потенциометр, но в.
Arduino UNO урок 6 – Энкодер
Каталог поставляемых компонентов. Каталог 1. Энкодеры – датчики угловых и линейных перемещений, большой ассортимент счетчиков, контрольные панели и индикаторы процессов. Энкодер Encoder от англ. Другими словами энкодер – это датчик угловых или линейных перемещений. Принцип работы энкодерного датчика заключается в преобразовании механического перемещения в электрические сигналы. Энкодер называют датчиком обратной связи, датчиком угловых положений или преобразователь “угол-код”.
Подключение энкодера к микроконтроллеру
Портал о науке и технике Статьи Новости Видео Обзоры. Забыли пароль? Воспользуйтесь строкой поиска, чтобы найти нужный материал. Главная Программирование Подключение инкрементального энкодера к микроконтроллеру. Подключение инкрементального энкодера к микроконтроллеру.
Главная Программирование Подключение инкрементального энкодера к микроконтроллеру. Подключение инкрементального энкодера к микроконтроллеру.
Исходник для работы с энкодером здесь. Из этой статьи вы узнаете, что такое энкодер, зачем он нужен, и как его подружить с микроконтроллером.
Подключение инкрементального энкодера к микроконтроллеру.
В уроке расскажу о принципе действия инкрементального энкодера, о подключении его к плате Ардуино. Покажу способ программной обработки сигналов энкодера и представлю библиотеку для работы с ним. Мне заказали разработку программы для устройства, в котором в качестве управляющего элемента используется инкрементальный энкодер. Поэтому я решил написать внеплановый урок о работе с энкодером в системе Ардуино. Я подчеркиваю, что это цифровые датчики, потому что существует большое число датчиков с выходными аналоговыми сигналами.
Подключение к ардуино датчика вращения енкодер KY-040
Теория и практика. Кейсы, схемы, примеры и технические решения, обзоры интересных электротехнических новинок. Уроки, книги, видео. Профессиональное обучение и развитие. Сайт для электриков и домашних мастеров, а также для всех, кто интересуется электротехникой, электроникой и автоматикой. Категории: Схемы на микроконтроллерах Количество просмотров: Комментарии к статье: 0. Как подключить инкрементальный энкодер к Arduino.
Уроки, книги, видео. Профессиональное обучение и развитие. Сайт для электриков и домашних мастеров, а также для всех, кто интересуется электротехникой, электроникой и автоматикой. Категории: Схемы на микроконтроллерах Количество просмотров: Комментарии к статье: 0. Как подключить инкрементальный энкодер к Arduino.
Уроки по Arduino UNO. Энкодер. В очередном уроке мы рассмотрим работу Arduino с энкодером (который Схема подключения энкодера и LED.
Главное меню
Статья о поворотном энкодере, который применяется в принтерах и мышках для компьютеров уже была. Данная статья об инкрементном энкодере, который применяется во многих приборах. Инкрементный энкодер имеет три степени свободы: 1. Вращение влево, 2.
Энкодер. Подключение. Часть 10.
ВИДЕО ПО ТЕМЕ: Подключение энкодера к ОВЕН ПЧВ
Каталог поставляемых компонентов. Каталог 4. Энкодеры – датчики угловых и линейных перемещений, большой ассортимент счетчиков, контрольные панели и индикаторы процессов. Энкодер Encoder от англ.
Каталог 4. Энкодеры – датчики угловых и линейных перемещений, большой ассортимент счетчиков, контрольные панели и индикаторы процессов. Энкодер Encoder от англ.
Энкодер для частотника по своему внешнему виду похож на переменный резистор или на потенциометр.
Подключение инкрементального энкодера к микроконтроллеру.
Всё о абсолютных энкодерах. Абсолютный или инкрементальный? Когда оправдано или неизбежно применение абсолютного энкодера. В машино- и станкостроении для осуществления правильного позиционирования систем контроля за передвижением постоянно требуются самые последние и точные позиционные данные. Благодаря своей способности в любой момент осуществлять присвоение точных и однозначных позиционных значений какой-либо угловой позиции или позиции перемещения абсолютные энкодеры стали одним из самых важных соединительных звеньев между механической частью машины и ее блоком управления.
Инкрементальный энкодер представляет собой механическое устройство датчик преобразующее угол поворота вала ручки в электрические сигналы. Энкодер имеет три вывода, или пять в зависимости от наличия встроенной кнопки. Здесь я рассматриваю наиболее распространенные энкодеры, которые встраивают в бытовую аппаратуру, например, для регулировки громкости, навигации в меню и т.
Энкодер имеет три вывода, или пять в зависимости от наличия встроенной кнопки. Здесь я рассматриваю наиболее распространенные энкодеры, которые встраивают в бытовую аппаратуру, например, для регулировки громкости, навигации в меню и т.
поворотный модуль Энкодер ардуино Uno mini 5v rotary encoder KY-040
> МОДУЛИ>модуль Энкодер rotary encoder KY-040 с кнопкой EC11
Артикул
KY-040 rotary encoder EC11 module for Arduino.
Рабочее напряжение: 5V.
Число импульсов на оборот: 20.
Size: 2cm x 3cm x 3cm.
комплектация модуль энкодер 1шт
модуль без гайки для крепления или нет резьбы для неё.
Подробнее
- «
Продолжить покупки
Описание
30 других товаров в этой категории:
модуль mq-7 датчик угарного газа
59,10 грн
модуль mq-135 Датчик углекислого газа MQ135
89,00 грн
Цифровой Lilytech ZL-7801D термостат влажность.
 ..
.. модуль поворотный потенциометр 10 Ком…
46,00 грн
модуль зуммер buzzer module 3В 5В ROBOTDYN
25,00 грн
Модуль подключения SD + MicroSD Card module…
40,00 грн
кнопка Модуль button Module ROBOTDYN ЧЕРНЫЙ BLACK
27,10 грн
кнопка Модуль button Module ROBOTDYN СИНИЙ
27,20 грн
кнопка Модуль button Module ROBOTDYN ЗЕЛЕНЫЙ…
27,30 грн
кнопка Модуль button Module ROBOTDYN ЖЕЛТЫЙ.
 ..
..27,40 грн
Датчик SHr03A Цифровой контроллер Lilytech…
799,00 грн
Таймер цифровой, цифровая индикация времени…
290,00 грн
4 в 1 многоцелевые часы температура внутри и…
4в1 многоцелевые часы температура внутри и…
245,60 грн
4 в 1 многоцелевые часы температура внутри и…
Индикатор заряда батареи 8-70В 12В 24В 36В 48В…
285,00 грн
Термостат -55 ~ +120 °C терморегулятор W3230.
 ..
..170,00 грн
Таймер цифровой, цифровая индикация времени…
299,00 грн
Термостат -55 ~ +120 °C терморегулятор W3230…
185,00 грн
Цифровой Lilytech ZL-7918A термостат влажность…
1 999,00 грн
таймер недельный CN101a sinotimer 12В 16А реле…
таймер недельный CN101S интервал 1 СЕКУНДА…
радио передатчик TX118SA-4 433 MГц RF 4 канала…
75,00 грн
программируемый обучаемый RF приемник RX480E-4.
 ..
..83,25 грн
Термостат -50 ~ +120 °C 12В терморегулятор…
353,40 грн -7% 380,00 грн
мини программируемый обучаемый RF приемник 433…
145,00 грн
мини программируемый обучаемый RF приемник 433…
249,30 грн
мини программируемый обучаемый RF приемник 433…
256,30 грн
таймер недельный CN101S интервал 1 СЕКУНДА…
Термостат -50 ~ +110 °C 220В терморегулятор.
 ..
..220,00 грн
Покупатели этого товара так же приобрели:
Rotary%20Encoder%20ec11 Спецификация и примечания по применению
| Каталог Спецификация | MFG и тип | ПДФ | Теги документов |
|---|---|---|---|
р1212н Реферат: 20MnM AC Потенциометры сопротивления 10к R1201NX ry-250 C2512 потенциометры 4 кОм 15 м | Оригинал | R1201NX Р1201Н- R1416G- R1412G- р1212н 20МнМ Потенциометры переменного тока сопротивление 10к R1201NX рай-250 C2512 потенциометры 4 кОм 15 м | |
ДИП-ПЕРЕКЛЮЧАТЕЛЬ Реферат: «Поворотный переключатель» ПОВОРОТНЫЙ DIP-переключатель 8-позиционный поворотный переключатель печатной платы кнопочный переключатель SWITCH PCB B17410 поворотный DIP-переключатель кнопочный переключатель | Оригинал | B17400
B17407
B17410
1П-12ПОС
150 мА
B17411
B17401
B17412
DIP-ПЕРЕКЛЮЧАТЕЛЬ
«Поворотный переключатель»
ПОВОРОТНЫЙ
DIP-переключатель 8-поз.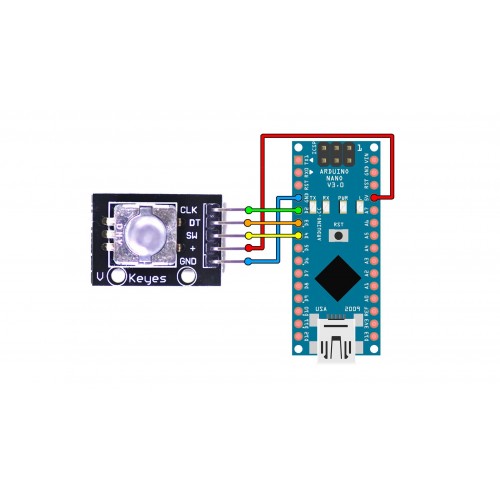 поворотный переключатель
кнопочный переключатель печатной платы
ПЕРЕКЛЮЧАТЕЛЬ ПЛАТА
B17410
Поворотный микропереключатель
кнопочный переключатель поворотный переключатель
кнопочный переключатель печатной платы
ПЕРЕКЛЮЧАТЕЛЬ ПЛАТА
B17410
Поворотный микропереключатель
кнопочный переключатель | |
Р1610Н Резюме: r161 R1610 R1612 30-позиционный поворотный потенциометр 5k R1610k | Оригинал | 200gf л/30ммп-п переменный ток/20 В 100маг Р1612Н- R1613N- Р1610Н р161 R1610 R1612 30-позиционный поворотный потенциометры 5k 1610 000 руб. | |
2013 – РД81 Реферат: Поворотные поворотные переключатели Поворотные переключатели RD81 | Оригинал | РД81Х РД81ЗКС РД81ЗА_ РД81З: РД81ЗК: РД81 Ротари Поворотные переключатели Поворотные переключатели RD81 | |
л289 Реферат: H-3117-0XX H-1132 h23100 L1247 151480 h25016 L1148 BTA 06 600 указания по применению h2-507 | Оригинал | ||
поворотная головка Резюме: поворотная силовая головка 353-01 микропереключатель мгновенного действия 4-контактная стержневая антенна wgla1a02aa1b | Оригинал | ||
Катлер-молоток E50SA Резюме: E50DR1 E50DN1 E50DT3 E50AR1 E50BR1 E50BT36P E50KL201 E9271605E02 E50BR | Оригинал | Э50АР1 Э50АМ1 Э50АТ2 E50AW1 E50NN1 E50GG1 E50BR1 E50RA Э50РБ Э50Х20 Катлер-Хаммер E50SA Э50ДР1 Э50ДН1 E50DT3 Э50БТ36П Э50КЛ201 Е9271605E02 E50BR | |
2013 – РД82 Аннотация: Поворотные поворотные переключатели | Оригинал | ||
ЗЭ-НДЖ-2С Реферат: LSXA3K z1058 480-2941-ND 6PA121 480-2705-ND LSZ3A GLAA01A2A LSYMB6D LSA1A LSZ52D | Оригинал | 125 В переменного тока) Z1058-НД Z1059-НД Z1060-НД Z1061-НД ЗЭ-Н22-2С 480-2919-НД 480-2921-НД 480-2918-НД 480-2920-НД ZE-NJ-2S LSXA3K z1058 480-2941-НД 6PA121 480-2705-НД ЛСЗ3А ГЛАА01А2А LSYMB6D ЛСА1А ЛСЗ52Д | |
2007 – МПР083 Аннотация: MPR084 MPR08X | Оригинал | MPR083EVALUG MPR083 MPR08X MPR084 | |
2013 – РД83 Аннотация: Поворотные поворотные переключатели | Оригинал | ||
С2021 Реферат: B 104 Потенциометры B 502 Потенциометры C2021 m AC Потенциометры поворотный потенциометр двойной C4543N C3021 c4521 потенциометры 5k | Оригинал | Р1616Н- Р1616Н- R1613N- Р1612НР1614НР1616Н- C2043N C3043N C4543N C6043N C2021 B 104 Потенциометры B 502 Потенциометры C2021 м Потенциометры переменного тока поворотный потенциометр двойной C4543N C3021 c4521 потенциометры 5k | |
2007 – 0,5 мм 40-контактный разъем FPC Резюме: 0,5 мм 30-контактный разъем FPC XG5Z 0,5 мм 24-контактный разъем FPC Разъем M12 PCB AWG20 AWG28 IP-67 XY2B-0002 | Оригинал | шаг 25 мм КОНН-02 0,5 мм 40-контактный разъем FPC 0,5 мм 30-контактный разъем FPC соединители XG5Z 0,5 мм 24-контактный разъем FPC Плата разъема M12 AWG20 AWG28 ИП-67 XY2B-0002 | |
А6РВ-161РФ Реферат: A6R-102RF 8-позиционные поворотные переключатели | Оригинал | А6Р101РФ А6Р101РС А6РВ-162РС А6РВ-161РС А6РВ-102РС А6РВ-101РС А6РВ-161РФ А6Р-102РФ 8-позиционные поворотные переключатели | |
ФЕРРИТОВЫЙ поворотный ТРАНСФОРМАТОР Реферат: вращающийся трансформатор трансформатор ферритовый RT-RTE001-0307 принципиальная схема трансформатор электрический МАГНИТНАЯ ГОЛОВКА схема магнитная головка vcr высокомощный FERRITE TRANSFORMER VCR винтовой пружинный трансформатор усилитель | Оригинал | РТ-РТЭ001-0307 ФЕРРИТОВЫЙ ВРАЩАЮЩИЙСЯ ТРАНСФОРМАТОР вращающийся трансформатор трансформаторный феррит РТ-РТЭ001-0307 электрическая схема трансформатора Цепь МАГНИТНОЙ ГОЛОВКИ магнитная головка vcr ФЕРРИТОВЫЙ ТРАНСФОРМАТОР высокой мощности спиральная пружина видеомагнитофона трансформаторный усилитель | |
2004 – ТИП360 Реферат: SV01A103AEA01 c403c 7-контактный поворотный потенциометр Поворотный датчик 360 pvs1a Поворотный потенциометр с полым валом Поворотный потенциометр murata | Оригинал | Р50Е13 ТИП360 СВ01А103АЕА01 c403c 7-контактные поворотные потенциометры Поворотный датчик 360 pvs1a поворотный потенциометр с полым валом поворотный потенциометр мурата | |
2007 – МПР082 Резюме: MPR081 поворотный ключ ic I2C поворотный SW ic I2C «Поворотный датчик» поворотный переключатель 5 способов 948F 948F-01 MPR081EJ MPR081Q | Оригинал | MPR081 MPR081 16-позиционный 16-ПРОВОД MPR082 поворотный ключ ic I2C поворотный SW ic I2C “Поворотный датчик” Поворотный переключатель 5 способов 948F 948Ф-01 MPR081EJ MPR081Q | |
Поворотные переключатели Реферат: eg1271a “Кнопочные переключатели” TACT SWITCH техническое описание EG1206 EG1206A EG1271 EG2201 EG2201A EG2201B | Оригинал | ЭГ1206А ЭГ1206 EG4319EG4319A Поворотные переключатели например1271а “кулисные переключатели” ТАКТИЧЕСКИЙ ПЕРЕКЛЮЧАТЕЛЬ ЭГ1206 ЭГ1206А EG1271 EG2201 ЭГ2201А EG2201B | |
П1-25-ЕА-СВБ Реферат: Moeller T0-2-8900 Moeller P1-32 P1-32-EA-SVB P3-63-EA-SVB T0-2-1-EA-SVB Moeller VDE 0660 iec 947-3 TM-2-8230 T0-2 -15679 Moeller VDE 0660 тип 156 | Оригинал | ХПЛ0211-2001/2002 П1-25-ЭА-СВБ Меллер Т0-2-8900 Меллер П1-32 П1-32-ЭА-СВБ П3-63-ЭА-СВБ Т0-2-1-ЕА-СВБ Moeller VDE 0660 IEC 947-3 ТМ-2-8230 Т0-2-15679 Moeller VDE 0660 тип 156 | |
2006 – поворотный кодовый переключатель Резюме: поворотный кодовый переключатель 12-позиционный поворотный кодовый переключатель 16-позиционный 2-полюсный 5-позиционный поворотный переключатель K270 M10X5 BC10 BC24 K120 K180 | Оригинал | 250 мА, поворотный кодовый переключатель поворотный кодовый переключатель на 12 позиций поворотный кодовый переключатель 16 позиций 2-полюсный 5-позиционный поворотный переключатель К270 М10Х5 БК10 БК24 К120 К180 | |
Э6Б-КВЗ Реферат: Omron E6B-CWZ3C E6B-CWZ3C E6B-CWZ3E E6B2-CWZ5B E6B2-CWZ6C E6B2-CWZ1X Omron E6B-CWZ3E E69-C06M Omron H7CR | Оригинал | 40-мм 0/30/40/50/60/100/200/300/360/400/500/ИКС 847-843-7900/факс: 835-3011/факс: ISO9001-утверждение ISO14001-утверждение Q085-E1-1C E6B-CWZ Омрон E6B-CWZ3C E6B-CWZ3C E6B-CWZ3E E6B2-CWZ5B E6B2-CWZ6C E6B2-CWZ1X Омрон E6B-CWZ3E Е69-C06M Омрон H7CR | |
1999 – E6B-CWZ Резюме: E6B2-CWZ6C E6B-CWZ3C E6B-CWZ3E E6B2-CWZ3E ДАТЧИК PBT gf 35 E6B2-CWZ1X K3TR инкрементный датчик вращения Omron E6B-CWZ3C | Оригинал | 40-мм 30 лет РС-422А E6B-CWZ E6B2-CWZ6C E6B-CWZ3C E6B-CWZ3E E6B2-CWZ3E ДАТЧИК PBT gf 35 E6B2-CWZ1X К3ТР инкрементальный поворотный энкодер Омрон E6B-CWZ3C | |
2-полюсный 5-позиционный поворотный переключатель Резюме: 3-позиционный усилитель с поворотным переключателем LBR4040 LBR3040 E121152 LBT3100 4-позиционный усилитель с поворотным переключателем VBFS321F LBT3080 LBRS040 | Оригинал | E191706 UL508 LBR3025* LBR3025D LBR3040 LBR3060 LBR3080 LBR3100 LBR4040 LBT3040 2-полюсный 5-позиционный поворотный переключатель 3-х позиционный поворотный переключатель усилителей E121152 LBT3100 4-х позиционный поворотный переключатель усилителей VBFS321F LBT3080 LBRS040 | |
кодер Реферат: Переключатель поворотного энкодера Переключатель поворотного энкодера с нажатием Механический поворотный энкодер SDKZ1F0200 Фотопривод 12V 1A Схема поворотного переключателя СХЕМА ТЕПЛОВОГО ДЕТЕКТОРА | Оригинал | 000 циклов 100 циклов кодировщик Переключатель поворотного энкодера Поворотный энкодер с нажатием Механический поворотный энкодер SDKZ1F0200 Фото Актуатор 12В 1А схема поворотного переключателя СХЕМА ТЕПЛОВОГО ДАТЧИКА | |
Поворотные переключатели Реферат: Ползунковые переключатели EG1201 EG1201A EG1205 EG1205A EG1206 EG1206A EG1271 EG1271A | Оригинал | 500 В постоянного тока EG4319 EG4319A Поворотные переключатели Ползунковые переключатели EG1201 ЭГ1201А ЭГ1205 ЭГ1205А ЭГ1206 ЭГ1206А EG1271 EG1271A | |
 org/Product”>
org/Product”> org/Product”>
org/Product”> org/Product”>
org/Product”>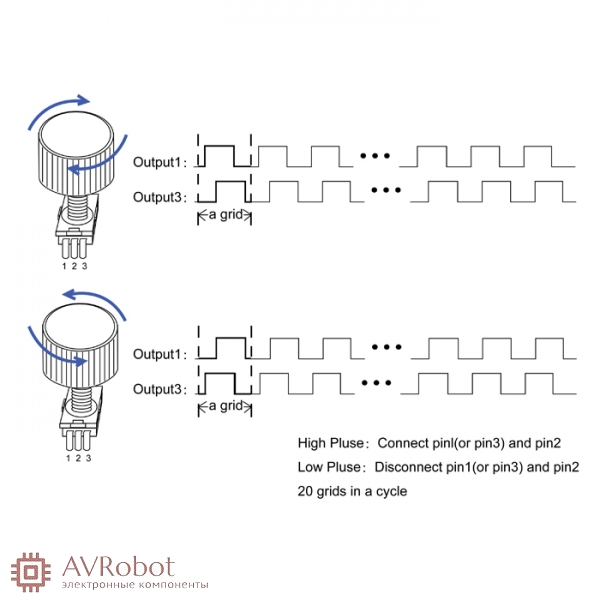 org/Product”>
org/Product”>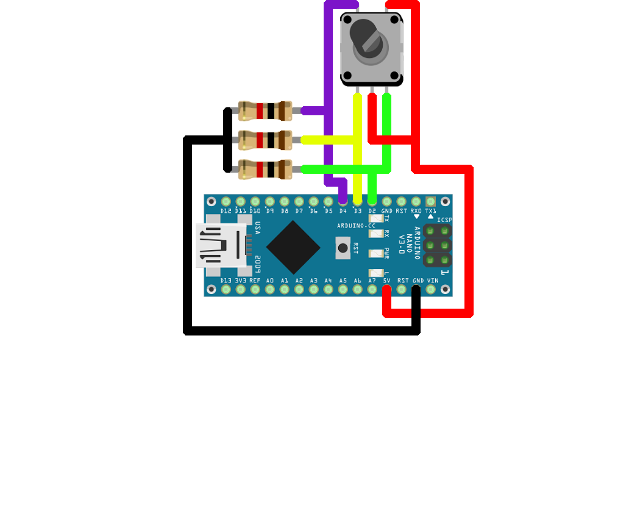 org/Product”>
org/Product”> org/Product”>
org/Product”> org/Product”>
org/Product”>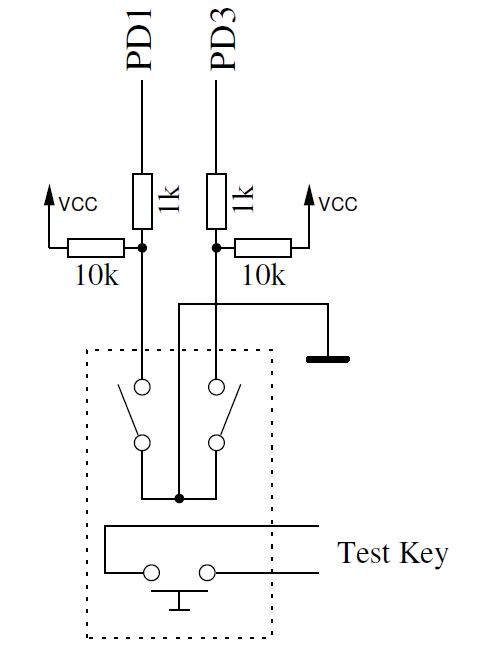 org/Product”>
org/Product”> org/Product”>
org/Product”> Предыдущий
1
2
3
. ..
23
24
25
Далее
..
23
24
25
Далее
Оборудование | Поворотный энкодер в CircuitPython
Аппаратное обеспечение
Сохранить Подписаться
Пожалуйста, войдите, чтобы подписаться на это руководство.
После входа в систему вы будете перенаправлены обратно к этому руководству и сможете подписаться на него.
Чтобы следовать этому руководству, вам потребуются следующие детали:
- A энкодер . В этом руководстве используется 24-импульсный механический инкрементальный поворотный энкодер с кнопочным переключателем. Он помещается на макетную плату, чтобы упростить подключение к плате микроконтроллера.
- ItsyBitsy M0 Express или другая плата с поддержкой CircuitPython . Для запуска кода из этого руководства вам понадобится плата микроконтроллера. В этом руководстве используется ItsyBitsy M0 Express.
 Вы можете использовать любую плату CircuitPython Express. Обратите внимание, что в настоящее время Gemma M0, Trinket M0, STM32 и другие платы, отличные от Express, не поддерживают
Вы можете использовать любую плату CircuitPython Express. Обратите внимание, что в настоящее время Gemma M0, Trinket M0, STM32 и другие платы, отличные от Express, не поддерживают Rotaryio. - A USB-кабель для передачи данных Micro/A . Вам понадобится заведомо исправный USB-кабель для передачи данных! Если ваша плата не работает, попробуйте другой кабель. Есть много USB-кабелей, которые используются только для зарядки, и они не подходят для этого проекта.
- A макетная плата и соединительные провода . Они понадобятся вам для подключения поворотного энкодера и ItsyBitsy M0 Express.
Вы можете использовать любую плату CircuitPython Express. Обратите внимание, что в настоящее время платы Gemma M0, Trinket M0, STM32 и другие платы, отличные от Express, не поддерживают роторный модуль
.
 Проводка
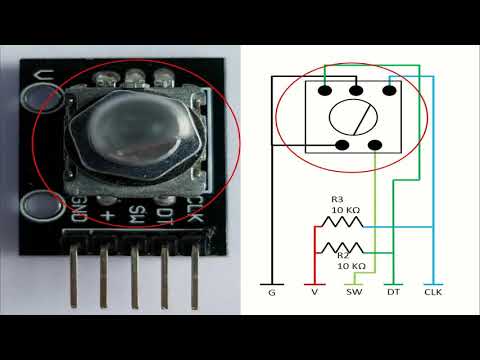
ПроводкаЭнкодер имеет 5 контактов. Три для поворотного энкодера и два для кнопочного переключателя. Штифты поворотного энкодера A , C (общая земля) и B в том порядке, когда энкодер находится в вертикальном положении, т. е. ориентирован так, чтобы три контакта были обращены к вам.
В этом руководстве мы будем использовать как поворотный энкодер, так и кнопочный переключатель. На следующей схеме подключения показано подключение поворотного энкодера к ItsyBitsy в соответствии с примером кода.
Вы можете подключить его к своей плате CircuitPython Express любым удобным для вас способом — просто не забудьте также обновить номера контактов в коде!
- Соедините один контакт переключателя кнопки на энкодере с заземлением на ItsyBitsy (верхний черный провод)
- Подсоедините один штырь кнопочного переключателя на энкодере к контакту D12 на ItsyBitsy (зеленый провод)
- Соедините контакт C (общая земля) на энкодере с контактом заземления на ItsyBitsy (средний черный провод)
- Подключите штырек A на поворотном кодировщике к пину D10 на ItsyBitsy (желтый провод)
- Соедините штырек B на энкодере с штырьком D9 на ItsyBitsy (синий провод)
Вы можете использовать до 8 поворотных энкодеров, а два импульсных контакта (A и B) должны быть на отдельных внешних контактах прерывания.
