Частотный преобразователь: полный обзор функций частотника
Преобразователем частоты именуют статическую преобразовательную конструкцию, используемую с целью регуляции скорости вращения асинхронного электрического двигателя. Устройства данного типа, работающие на переменном токе, гораздо проще сконструированы, и их легче эксплуатировать в сравнении с двигателями, использующими постоянный ток. Это способствует популяризации асинхронного электродвигателя.
Преобразователь частоты обеспечивает плавность пуска и остановки электрического двигателя. Наиболее уместно его использование для крупного электродвигателя с большой мощностью.
Кроме частотного преобразователя для регуляции вращательной скорости могут применяться: механические вариаторы, гидравлические муфты и т. д. Однако, такие компоненты имеют ряд недостатков:
- Низкий уровень качества;
- Сложная конструкция;
- Высокая себестоимость;
- Узкий диапазон вариантов рабочей частоты.
Частотный преобразователь для электродвигателя, регулирующий уровень напряжения питающего тока и его частоту, по данным пунктам явно отличается в лучшую сторону. Как результат, КПД преобразования стремится к ста процентам при достаточно низкой угрозе поломок.
Классификация преобразователей частоты
Согласно типу питающего напряжения необходимого для работы частотного преобразователя, существуют устройства следующих групп:
- Однофазные;
- Трёхфазные;
- Высоковольтные.
Преобразователь может быть подключён к электродвигателям следующих типов:
- Однофазным, имеющим расщеплённые полюса, и однофазным конденсаторным;
- Трёхфазным, асинхронного типа, работающим с использованием переменного тока.
- Оснащённых постоянными магнитами.
Существует несколько сфер использования частотного преобразователя:
- Общепромышленная;
- Векторное преобразование частоты;
- Механизмы с насосно-вентиляторным типом нагрузки;
- Преобразователи частоты в кранах и иных подъёмных механизмах;
Также существуют взрывозащищённые преобразователи, ориентированные на тяжёлые условия эксплуатации, и децентрализованные модели, которые устанавливаются прямо на базе асинхронного электродвигателя.
Особенности устройства преобразователя частоты
Типичная схема, свойственная частотному преобразователю, основана на построении двойного преобразования. Это означает, что устройство состоит из:
- Звена постоянного тока, также сформированного из неуправляемого выпрямителя и фильтра;
- Силового импульсного инвентора;
- Системы управления.
Первый компонент отвечает за преобразование переменного сетевого напряжения в постоянное. После неуправляемого выпрямителя движения тока происходит через транзисторные ключи, обеспечивающие подключение обмотки асинхронного двигателя к положительным и отрицательным выводам звена постоянного тока. Эти транзисторы вместе называются силовым импульсным инвентором. Трёхфазный инвентор, состоящий из шести, осуществляет преобразование выпрямленного напряжения соответственно в трёхфазное переменное значение необходимой частоты и амплитуды, передаваемое на обмотку статора электрического двигателя.
Для компоновки импульсного инвентора предпочтительно использование IGBT-транзисторов (биполярные, имеют затвор), поскольку они являются обладателями достаточно высокой частоты переключения. Это позволяет формировать на выходе синусоидальный сигнал с минимальными искажениями.
Принципы функционирования частотного преобразователя
Регуляция пускового тока может осуществляться вручную, но это увеличивает затраты электропотребления и снижает срок эксплуатации асинхронного двигателя. Обычно без преобразователя напряжения показания до семи раз превышают значение номинала. Определённо, это не самые лучшие условия для эксплуатации.
Принцип работы преобразователей частоты связан со спецификой действия асинхронного электродвигателя. У двигателя подобного вида наблюдается зависимость между вращательной частотой магнитного поля и частотой напряжения питающего тока. В данном моменте и заключается смысл методики частотного управления. Изменяемая преобразователем входная частота напряжения отвечает за регуляцию частоты вращения. Таким образом, диапазон значений выходного напряжения весьма широк.
Таким образом, диапазон значений выходного напряжения весьма широк.
По принципу работы силового элемента частотные преобразователи можно отнести к следующим категориям:
- Конструкции, имеющие выраженный промежуточный неуправляемый выпрямитель.
- Конструкции, имеющие непосредственную связь (без промежуточного звена).
Частотники второго типа появились гораздо раньше, в них силовой компонент представлен управляемым выпрямителем, сконструированным из тиристоров. Формирование выходного сигнала происходит при поочерёдном отпирании тиристоров управляющим узлом. На сегодняшний день такие приборы потеряли свою актуальность.
Что касается частотного преобразователя первого типа, то он примечателен тем, что его можно запитать через внешнее звено постоянного тока. Сам частотник при этом защищается предохранителем быстрого действия. Однако, это делает нежелательным применение контакторов, поскольку данная разновидность коммутации провоцирует возникновение повышенного зарядного тока и выгорание предохранителей.
Работа частотного преобразователя связана с принципом двойного преобразования напряжения:
- Регуляция сетевого напряжения через выпрямление и фильтрование (для этого используются конденсаторные системы).
- Задействуется электронное управление, устанавливающее заблаговременно выбранную частоту тока.
- Происходит образование прямоугольных импульсов, корректируемых при помощи обмотки статора. В результате они преобразуются в синусоиду.
Содержание двух принципов управления преобразователем частоты
Существует диада основных принципов регуляции частотных преобразователей:
- Принцип скалярного управления.
Преобразователи частоты управляемые по данному принципу имеют низкую себестоимость. Часто применяются в приводах устройств, где степень частоты вращения может регулироваться в соотношении 1:40. Это позволяет адекватно управлять работой насосов, компрессоров, вентиляторов. К тому скалярный метод позволяет осуществлять регуляцию работы сразу нескольких электродвигателей.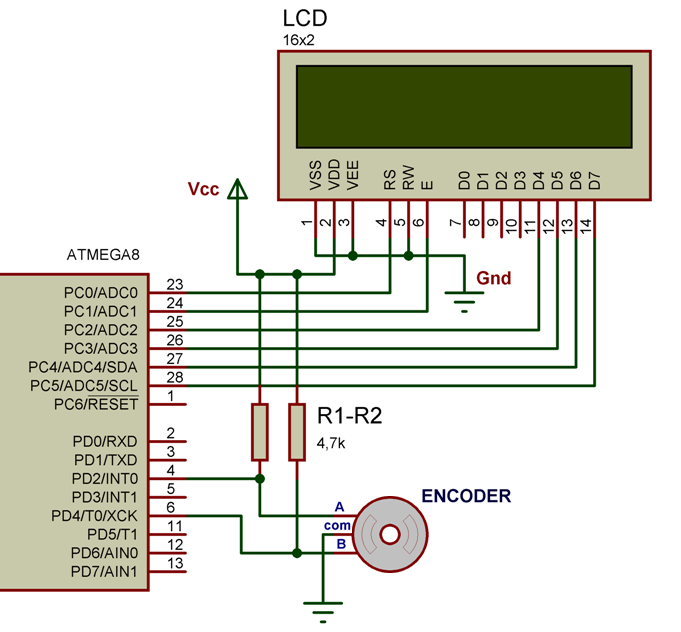
- Векторный принцип.
Имеют максимальное совпадение характеристик асинхронных электроприводов с параметрами приводов ПТ. Этому способствует разделение регуляционных каналов, связанных с потокосцеплением и вращательной скоростью асинхронного двигателя. Частотники, работающие в рамках данной системы управления, более дорогие по цене и применяются в устройствах требующих высокоточного регулирования скорости: станках, лифтах, кранах.
Как и где следует применять частотный преобразователь
Частотный преобразователь позволяет регулировать скорость действия следующих механизмов:
- Насосов, перекачивающих горячую или холодную воду по системе водоснабжения и обогрева;
- Вспомогательных агрегатов котельных, тепловых электростанций, ТЭЦ и т.д.;
- Дробилках, мельницах, мешалках;
- Песковых и пульповых насосов, используемых на обогатительных фабриках;
- Лифтовых установок;
- Разнотипных центрифуг;
- Производственных линий, создающих ленточные материалы;
- Кранового и эскалаторного оборудования;
- Устройств, обеспечивающих силовые манипуляции;
- Приводов на буровых станках, специализированных приборов и так далее.
Наиболее очевидна польза частотных преобразователей с точки зрения экономии:
- Оптимальный уровень КПД позволяет вдвое экономить электроэнергию.
- Количество и качество конечного продукта в производственной значительно возрастает.
- Комплектующие механизма меньше изнашиваются;
- Общая длительность эксплуатации оборудования также возрастает.
Как итог, частотный преобразователь отвечает за эффективность и продуктивность функционирования механизмов.
Тонкости выбора частотного преобразователя
Основным значимым параметром, при выборе той или иной модели преобразователя частоты, на сегодняшний день является именно его стоимость. Это обусловлено тем, что только для дорогого устройства характерна максимальная функциональность. Но это не отменяет наличие специфических требований в зависимости от того, для механизма какой категории подбирается преобразователь, поэтому необходимо учитывать:
Но это не отменяет наличие специфических требований в зависимости от того, для механизма какой категории подбирается преобразователь, поэтому необходимо учитывать:
- Разновидность и данные по мощности асинхронного электродвигателя, к которому подключается частотник;
- Насколько точно и в каком диапазоне можно регулировать скорость;
- Насколько точно осуществляется поддержание момента и скорости вращения на валу электрического двигателя;
- Соответствие конструкции (формы, размера, пульта управления и так далее) индивидуальным требованиям.
Обязательно также обратить внимание на значение мощности асинхронного электрического двигателя, с которым будет взаимодействовать преобразователь частоты. Если один из параметров (например: величина пускового момента, затрачиваемое на разгон или торможение время) должен соответствовать каким-то особым требованиям, то нужно выбрать устройство более высокого класса, чем потенциально подходящее.
Самостоятельная сборка преобразователя
Чтобы механизм адекватно функционировал, сеть должна обладать весьма широкой вариацией значений напряжения. Это снижает риск поломки устройства при резких скачках.
Частота должна соответствовать производственным запросам. Нижний предел этого параметра позволяет ориентироваться в спектре возможностей регулирования скорости привода. В случае, если требуется расширить частотный диапазон относительно уже имеющегося, то необходимо подобрать модель частотного преобразователя, принцип работы которой относится к векторному типу.
Однако, стандартный рабочий диапазон составляет 10-60 Герц и лишь иногда доходит до 100 Герц.
Далее следует обратить внимание на входы и выходы управления. Процесс применения устройств с достаточно большим количеством разъёмов гораздо более удобен. Но и стоимость от этого возрастает, кроме того, затрудняется настройка. Подобные приборы могут быть оснащены дискретными, цифровыми или аналоговыми разъёмами.
Использование дискретного разъёма позволяет вводить управляющие команды и выводить информацию о течении процесса. Цифровой разъём обеспечивает введение сигналов, подаваемых цифровыми датчиками. Аналоговый разъём предназначен для введения сигнала обеспечивающего обратную связь.
Цифровой разъём обеспечивает введение сигналов, подаваемых цифровыми датчиками. Аналоговый разъём предназначен для введения сигнала обеспечивающего обратную связь.
Также следует проверять соответствие характеристик шины управления и возможностей преобразователя. В первую очередь это можно понять по соответствию числа разъёмов. По возможности их должно быть даже больше, чем требуется, чтобы имелся простор для модернизирования.
Если говорить о перегрузочных способностях, то следует предпочесть модели, которые имеют уровень мощности на 15% превышающий данные по мощности у двигателя.
В любом случае всегда нужно как следует изучать прилагающуюся к частотнику документацию. Там можно найти все требуемые сведения о параметрах и характеристиках.
Схема сборки
Следующая последовательность подойдёт для проводки, функционирующей с уровнем напряжения в 220 вольт и на одной фазе. Схема рассчитана на двигатель уровнем мощности не более 1 кВт.
В первую очередь осуществляется соединение обмоток двигателя по принципу “треугольник”.
В качестве фундамента преобразователя используется пара плат. Одна из них необходима для блока питания и драйвера. Также туда будут относиться транзисторы и силовые клеммы. Другую плату применяют, чтобы закрепить микроконтроллер и индикатор. Между собой платы контактируют посредством гибкого шлейфа.
Для моделирования импульсного блока питания понадобится стандартная схема, которую можно обнаружить в сети.
Для контроля работы двигателя и напряжения не нужно влиять на ток извне. Тем не менее вполне уместно ввести в устройство линейную развязку с микросхемой.
На общем радиаторе устройства фиксируются транзисторы и диодный мост.
Обязательно потребуются оптроны ОС2-4, которые используются для дублирования кнопок управления. А с помощью ОС-1 выполняются пользовательские функции.
Однофазный преобразователь частоты не нуждается в трансформаторе. В качестве альтернативы воспользоваться токовым шунтом, который при необходимости дополняется при помощи усилителя DA-1.
При мощности до 400 ватт схема для стабильной работы двигателя не требует установки термодатчика. Уровень сетевого напряжения вполне можно контролировать усилителем DA-1-2.
Для управляющих кнопок необходима защита в виде пластиковых толкателей. Сам процесс управления построен на опторазвязке.
При применении проводов чрезмерной длины, используются помехоподавляющие кольца.
Методика подключения преобразователя частоты к двигателю
Подключение преобразователя возможно только при соблюдении рекомендованной изготовителем комплектации устройства:
- Сечения определённых типов;
- Провода определённых типов;
- Дополнительное оборудование.
К дополнительному оборудованию можно отнести:
- Реактор ПТ;
- Тормозной блок;
- Фильтр (входной/выходной).
Не рекомендовано занижение номинала автоматического выключателя. Даже минимальное несоответствие может привести к хаотичному размыканию цепи, что зачастую сводит ситуацию к тому, что звено постоянного тока выходит из строя, и схема оказывается нарушена. Следует обращать внимание на то, чтобы наконечники проводов были хорошо обжаты.
Зачастую при самостоятельной установке входная и выходная клеммы оказываются перепутаны (хотя общепонятную маркировку преобразователя вполне можно увидеть). Поэтому нужно знать, схема формируется таким образом, что клеммы L1, L2, L3 используются для соединения с питающей сетью, а U, V, W – предназначаются для электродвигателя. Если не соблюсти этого правила, скорее всего придётся всё ремонтировать.
Ввод в эксплуатацию преобразователя частоты Danfoss VLT Micro Drive FC 51
Watch this video on YouTube
Также, поломка гарантирована, если на входы управляющего элемента осуществляется подача напряжения на 220 и 380 вольт.
Уход за преобразователем
Чтобы продлить срок службы ПЧ следует осуществлять за ним соответствующий уход:
- Отслеживать оседание пыли на внутренних элементах и производить своевременную чистку устройства при помощи компрессора.
- Удостоверяться в работоспособности узлов, которые используются механизме, и производить их замену, если возникает такая необходимость.
- Соблюдать адекватную рабочую температуру (не более +40°С) механизма и уровень напряжения на управляющей шине.
- Регулярно (не реже одного раза за 3 года) обновлять слой термопасты на силовых компонентах устройства.
- По возможности соблюдать умеренный уровень влажности.
Частотный преобразователь: полный обзор функций частотника
Преобразователем частоты именуют статическую преобразовательную конструкцию, используемую с целью регуляции скорости вращения асинхронного электрического двигателя. Устройства данного типа, работающие на переменном токе, гораздо проще сконструированы, и их легче эксплуатировать в сравнении с двигателями, использующими постоянный ток. Это способствует популяризации асинхронного электродвигателя.
Преобразователь частоты обеспечивает плавность пуска и остановки электрического двигателя. Наиболее уместно его использование для крупного электродвигателя с большой мощностью.
Кроме частотного преобразователя для регуляции вращательной скорости могут применяться: механические вариаторы, гидравлические муфты и т. д. Однако, такие компоненты имеют ряд недостатков:
- Низкий уровень качества;
- Сложная конструкция;
- Высокая себестоимость;
- Узкий диапазон вариантов рабочей частоты.
Частотный преобразователь для электродвигателя, регулирующий уровень напряжения питающего тока и его частоту, по данным пунктам явно отличается в лучшую сторону. Как результат, КПД преобразования стремится к ста процентам при достаточно низкой угрозе поломок.
Классификация преобразователей частоты
Согласно типу питающего напряжения необходимого для работы частотного преобразователя, существуют устройства следующих групп:
- Однофазные;
- Трёхфазные;
- Высоковольтные.
Преобразователь может быть подключён к электродвигателям следующих типов:
- Однофазным, имеющим расщеплённые полюса, и однофазным конденсаторным;
- Трёхфазным, асинхронного типа, работающим с использованием переменного тока.
- Оснащённых постоянными магнитами.
Существует несколько сфер использования частотного преобразователя:
- Общепромышленная;
- Векторное преобразование частоты;
- Механизмы с насосно-вентиляторным типом нагрузки;
- Преобразователи частоты в кранах и иных подъёмных механизмах;
Также существуют взрывозащищённые преобразователи, ориентированные на тяжёлые условия эксплуатации, и децентрализованные модели, которые устанавливаются прямо на базе асинхронного электродвигателя.
Особенности устройства преобразователя частоты
Типичная схема, свойственная частотному преобразователю, основана на построении двойного преобразования. Это означает, что устройство состоит из:
- Звена постоянного тока, также сформированного из неуправляемого выпрямителя и фильтра;
- Силового импульсного инвентора;
- Системы управления.
Первый компонент отвечает за преобразование переменного сетевого напряжения в постоянное. После неуправляемого выпрямителя движения тока происходит через транзисторные ключи, обеспечивающие подключение обмотки асинхронного двигателя к положительным и отрицательным выводам звена постоянного тока. Эти транзисторы вместе называются силовым импульсным инвентором. Трёхфазный инвентор, состоящий из шести, осуществляет преобразование выпрямленного напряжения соответственно в трёхфазное переменное значение необходимой частоты и амплитуды, передаваемое на обмотку статора электрического двигателя.
Для компоновки импульсного инвентора предпочтительно использование IGBT-транзисторов (биполярные, имеют затвор), поскольку они являются обладателями достаточно высокой частоты переключения. Это позволяет формировать на выходе синусоидальный сигнал с минимальными искажениями.
Принципы функционирования частотного преобразователя
Регуляция пускового тока может осуществляться вручную, но это увеличивает затраты электропотребления и снижает срок эксплуатации асинхронного двигателя. Обычно без преобразователя напряжения показания до семи раз превышают значение номинала. Определённо, это не самые лучшие условия для эксплуатации.
Принцип работы преобразователей частоты связан со спецификой действия асинхронного электродвигателя. У двигателя подобного вида наблюдается зависимость между вращательной частотой магнитного поля и частотой напряжения питающего тока. В данном моменте и заключается смысл методики частотного управления. Изменяемая преобразователем входная частота напряжения отвечает за регуляцию частоты вращения. Таким образом, диапазон значений выходного напряжения весьма широк.
По принципу работы силового элемента частотные преобразователи можно отнести к следующим категориям:
- Конструкции, имеющие выраженный промежуточный неуправляемый выпрямитель.
- Конструкции, имеющие непосредственную связь (без промежуточного звена).
Частотники второго типа появились гораздо раньше, в них силовой компонент представлен управляемым выпрямителем, сконструированным из тиристоров. Формирование выходного сигнала происходит при поочерёдном отпирании тиристоров управляющим узлом. На сегодняшний день такие приборы потеряли свою актуальность.
Что касается частотного преобразователя первого типа, то он примечателен тем, что его можно запитать через внешнее звено постоянного тока. Сам частотник при этом защищается предохранителем быстрого действия. Однако, это делает нежелательным применение контакторов, поскольку данная разновидность коммутации провоцирует возникновение повышенного зарядного тока и выгорание предохранителей.
Работа частотного преобразователя связана с принципом двойного преобразования напряжения:
- Регуляция сетевого напряжения через выпрямление и фильтрование (для этого используются конденсаторные системы).
- Задействуется электронное управление, устанавливающее заблаговременно выбранную частоту тока.
- Происходит образование прямоугольных импульсов, корректируемых при помощи обмотки статора.
 В результате они преобразуются в синусоиду.
В результате они преобразуются в синусоиду.
Содержание двух принципов управления преобразователем частоты
Существует диада основных принципов регуляции частотных преобразователей:
- Принцип скалярного управления.
Преобразователи частоты управляемые по данному принципу имеют низкую себестоимость. Часто применяются в приводах устройств, где степень частоты вращения может регулироваться в соотношении 1:40. Это позволяет адекватно управлять работой насосов, компрессоров, вентиляторов. К тому скалярный метод позволяет осуществлять регуляцию работы сразу нескольких электродвигателей.
- Векторный принцип.
Имеют максимальное совпадение характеристик асинхронных электроприводов с параметрами приводов ПТ. Этому способствует разделение регуляционных каналов, связанных с потокосцеплением и вращательной скоростью асинхронного двигателя. Частотники, работающие в рамках данной системы управления, более дорогие по цене и применяются в устройствах требующих высокоточного регулирования скорости: станках, лифтах, кранах.
Как и где следует применять частотный преобразователь
Частотный преобразователь позволяет регулировать скорость действия следующих механизмов:
- Насосов, перекачивающих горячую или холодную воду по системе водоснабжения и обогрева;
- Вспомогательных агрегатов котельных, тепловых электростанций, ТЭЦ и т.д.;
- Дробилках, мельницах, мешалках;
- Песковых и пульповых насосов, используемых на обогатительных фабриках;
- Лифтовых установок;
- Разнотипных центрифуг;
- Производственных линий, создающих ленточные материалы;
- Кранового и эскалаторного оборудования;
- Устройств, обеспечивающих силовые манипуляции;
- Приводов на буровых станках, специализированных приборов и так далее.
Наиболее очевидна польза частотных преобразователей с точки зрения экономии:
- Оптимальный уровень КПД позволяет вдвое экономить электроэнергию.
- Количество и качество конечного продукта в производственной значительно возрастает.
- Комплектующие механизма меньше изнашиваются;
- Общая длительность эксплуатации оборудования также возрастает.
Как итог, частотный преобразователь отвечает за эффективность и продуктивность функционирования механизмов.
Тонкости выбора частотного преобразователя
Основным значимым параметром, при выборе той или иной модели преобразователя частоты, на сегодняшний день является именно его стоимость. Это обусловлено тем, что только для дорогого устройства характерна максимальная функциональность. Но это не отменяет наличие специфических требований в зависимости от того, для механизма какой категории подбирается преобразователь, поэтому необходимо учитывать:
- Разновидность и данные по мощности асинхронного электродвигателя, к которому подключается частотник;
- Насколько точно и в каком диапазоне можно регулировать скорость;
- Насколько точно осуществляется поддержание момента и скорости вращения на валу электрического двигателя;
- Соответствие конструкции (формы, размера, пульта управления и так далее) индивидуальным требованиям.
Обязательно также обратить внимание на значение мощности асинхронного электрического двигателя, с которым будет взаимодействовать преобразователь частоты. Если один из параметров (например: величина пускового момента, затрачиваемое на разгон или торможение время) должен соответствовать каким-то особым требованиям, то нужно выбрать устройство более высокого класса, чем потенциально подходящее.
Самостоятельная сборка преобразователя
Чтобы механизм адекватно функционировал, сеть должна обладать весьма широкой вариацией значений напряжения. Это снижает риск поломки устройства при резких скачках.
Частота должна соответствовать производственным запросам. Нижний предел этого параметра позволяет ориентироваться в спектре возможностей регулирования скорости привода. В случае, если требуется расширить частотный диапазон относительно уже имеющегося, то необходимо подобрать модель частотного преобразователя, принцип работы которой относится к векторному типу.
В случае, если требуется расширить частотный диапазон относительно уже имеющегося, то необходимо подобрать модель частотного преобразователя, принцип работы которой относится к векторному типу.
Однако, стандартный рабочий диапазон составляет 10-60 Герц и лишь иногда доходит до 100 Герц.
Далее следует обратить внимание на входы и выходы управления. Процесс применения устройств с достаточно большим количеством разъёмов гораздо более удобен. Но и стоимость от этого возрастает, кроме того, затрудняется настройка. Подобные приборы могут быть оснащены дискретными, цифровыми или аналоговыми разъёмами.
Использование дискретного разъёма позволяет вводить управляющие команды и выводить информацию о течении процесса. Цифровой разъём обеспечивает введение сигналов, подаваемых цифровыми датчиками. Аналоговый разъём предназначен для введения сигнала обеспечивающего обратную связь.
Также следует проверять соответствие характеристик шины управления и возможностей преобразователя. В первую очередь это можно понять по соответствию числа разъёмов. По возможности их должно быть даже больше, чем требуется, чтобы имелся простор для модернизирования.
Если говорить о перегрузочных способностях, то следует предпочесть модели, которые имеют уровень мощности на 15% превышающий данные по мощности у двигателя.
В любом случае всегда нужно как следует изучать прилагающуюся к частотнику документацию. Там можно найти все требуемые сведения о параметрах и характеристиках.
Схема сборки
Следующая последовательность подойдёт для проводки, функционирующей с уровнем напряжения в 220 вольт и на одной фазе. Схема рассчитана на двигатель уровнем мощности не более 1 кВт.
В первую очередь осуществляется соединение обмоток двигателя по принципу “треугольник”.
В качестве фундамента преобразователя используется пара плат. Одна из них необходима для блока питания и драйвера. Также туда будут относиться транзисторы и силовые клеммы. Другую плату применяют, чтобы закрепить микроконтроллер и индикатор.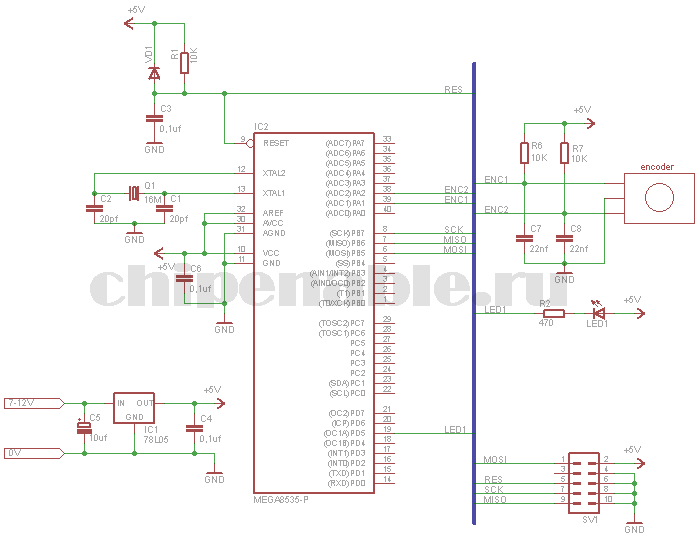 Между собой платы контактируют посредством гибкого шлейфа.
Между собой платы контактируют посредством гибкого шлейфа.
Для моделирования импульсного блока питания понадобится стандартная схема, которую можно обнаружить в сети.
Для контроля работы двигателя и напряжения не нужно влиять на ток извне. Тем не менее вполне уместно ввести в устройство линейную развязку с микросхемой.
На общем радиаторе устройства фиксируются транзисторы и диодный мост.
Обязательно потребуются оптроны ОС2-4, которые используются для дублирования кнопок управления. А с помощью ОС-1 выполняются пользовательские функции.
Однофазный преобразователь частоты не нуждается в трансформаторе. В качестве альтернативы воспользоваться токовым шунтом, который при необходимости дополняется при помощи усилителя DA-1.
При мощности до 400 ватт схема для стабильной работы двигателя не требует установки термодатчика. Уровень сетевого напряжения вполне можно контролировать усилителем DA-1-2.
Для управляющих кнопок необходима защита в виде пластиковых толкателей. Сам процесс управления построен на опторазвязке.
При применении проводов чрезмерной длины, используются помехоподавляющие кольца.
Методика подключения преобразователя частоты к двигателю
Подключение преобразователя возможно только при соблюдении рекомендованной изготовителем комплектации устройства:
- Сечения определённых типов;
- Провода определённых типов;
- Дополнительное оборудование.
К дополнительному оборудованию можно отнести:
- Реактор ПТ;
- Тормозной блок;
- Фильтр (входной/выходной).
Не рекомендовано занижение номинала автоматического выключателя. Даже минимальное несоответствие может привести к хаотичному размыканию цепи, что зачастую сводит ситуацию к тому, что звено постоянного тока выходит из строя, и схема оказывается нарушена. Следует обращать внимание на то, чтобы наконечники проводов были хорошо обжаты.
Зачастую при самостоятельной установке входная и выходная клеммы оказываются перепутаны (хотя общепонятную маркировку преобразователя вполне можно увидеть). Поэтому нужно знать, схема формируется таким образом, что клеммы L1, L2, L3 используются для соединения с питающей сетью, а U, V, W – предназначаются для электродвигателя. Если не соблюсти этого правила, скорее всего придётся всё ремонтировать.
Поэтому нужно знать, схема формируется таким образом, что клеммы L1, L2, L3 используются для соединения с питающей сетью, а U, V, W – предназначаются для электродвигателя. Если не соблюсти этого правила, скорее всего придётся всё ремонтировать.
Ввод в эксплуатацию преобразователя частоты Danfoss VLT Micro Drive FC 51
Watch this video on YouTube
Также, поломка гарантирована, если на входы управляющего элемента осуществляется подача напряжения на 220 и 380 вольт.
Уход за преобразователем
Чтобы продлить срок службы ПЧ следует осуществлять за ним соответствующий уход:
- Отслеживать оседание пыли на внутренних элементах и производить своевременную чистку устройства при помощи компрессора.
- Удостоверяться в работоспособности узлов, которые используются механизме, и производить их замену, если возникает такая необходимость.
- Соблюдать адекватную рабочую температуру (не более +40°С) механизма и уровень напряжения на управляющей шине.
- Регулярно (не реже одного раза за 3 года) обновлять слой термопасты на силовых компонентах устройства.
- По возможности соблюдать умеренный уровень влажности.
Подключение энкодера и описание протокола SSI – rentamatic
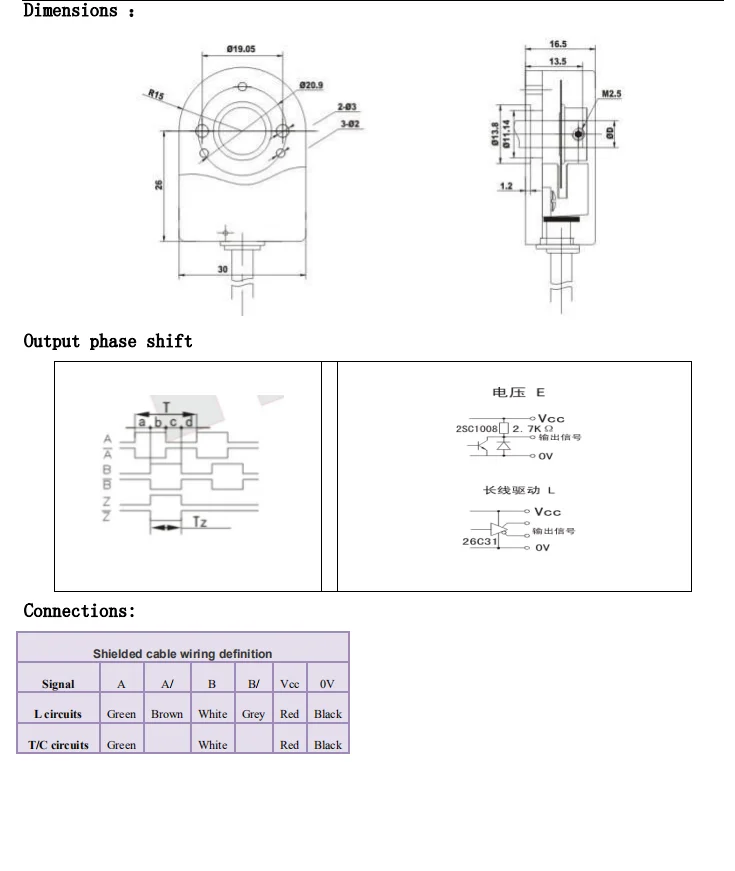
Типичное электрическое подключение датчика с SSI-интерфейсом
Описание протокола обмена SSI-интерфейса
В режиме ожидания, т.е. когда энкодер не опрашивается, сигнал на проводе “Clock+” (относительно “Clock+”) положительный (High). С первым спадом сигнала с High на Low данные в датчике “замораживаются”, т.е. энкодер подготавливается к передаче. С последующим фронтом сигнала (с Low на High) начинается передача данных, причем старшим битом (разрядом) вперед. Для надежного приема информации (учитывая емкостные задержки в линии связи) желательно, чтобы мастер (процессор) считывал бит с последующим спадом сигнала с High на Low. Таким образом, последовательность действий мастера следующая (на примере приема первых двух бит информации):
1. на провод “Clock+” подать уровень Low.
на провод “Clock+” подать уровень Low.
2. задержка // для обеспечения необходимой частоты такта (100kHz-1mHz).
3. на провод “Clock+” подать уровень High.
4. на провод “Clock+” подать уровень Low.
5. опросить провод Data (Low или High?), записать первый бит информации.
6. задержка //
7. на провод “Clock+” подать уровень High.
8. задержка //
9. на провод “Clock+” подать уровень Low.
10. опросить провод Data (Low или High?), записать второй бит информации.
и т.д. начиная с пункта 6.
Для опроса сенсора мастеру необходимо генерировать тактов на один больше чем разрешение датчика, т.е. для случая разрешения энкодера 24 бита надо подать 24+1 = 25 тактов.
Тактовая частота может составлять 100кгц – 1мгц. Время между тактовыми посылками должна составлять более 15мкс. После последнего переданного бита датчик передает Low-сигнал в течении около 15мкс, что для мастера может означать конец передачи данных. Таким образом, следующая тактовая посылка от мастера должна прийти по истечении этого (15мкс) времени. Если такт придет раньше, то датчик начнет повторять передачу данных с самого начала, т.е. старые, не актуализированные данные. Таким образом, можно использовать этот режим (передавая, например, 24+1 тактов вместо 12+1) для контроля достоверности переданных данных, сравнивая принятые данные между собой. Лишь по истечении 15мкс данные внутри датчика (в выходных сдвиговых регистрах) актуализируются.
Перекодировка с Gray-code в Binary может осуществлятся, например, с помощью логических элементов “исключающее или”
Несколько слов о RS-485:
Входные и выходные параметры датчика соответствуют стандарту RS-485. Т.е сигнал на выходе управляющего устройства (Takt-, Takt+) можно формировать с помощью вышеуказанного Line Driver, например, типа 65176.
В случае необходимости энкодер можно также подключить по упрощенной схеме:
1.
2. На вход “Takt+” подавать тактовый сигнал (Low=0V, High=5V)
Выход датчика, т.е. выводы “Data+”, “Data-” выдают сигнал в противофазе друг другу (RS-485) и разница потенциала между ними составляет около 7V. На эти два выхода можно подключить, например, оптопару (например, photocoupler TLP113), которая будет на своем выходе обеспечивать к TTL уровни.
Подав тактовый сигнал (Takt-, Takt+) к датчику можно осциллографом наблюдать сигнал на выходе датчика (Data+, Data-) и, таким образом, подобрать удобный Вам вариант подключения. Обратите внимание на то, что один выход (например, “Data-” на массу подключать не рекомендуется. Сигнал можно однако снимать относительно массы датчика и “Data+”. При этом “Data-” остается не подключенным. Амплитуда сигнала при этом будет составлять примерно от 1V до 3,5V.
При упрощенном способе подключения, т.е. не по стандарту RS-485, необходимo учитывать низкую помехозащищенность линии связи между датчиком и устройством управления.
Подключение энкодера к микроконтроллеру | RadioLaba.ru
#include <p16f628a .INC>
LIST p=16F628A
__CONFIG H’3F18′ ;конфигурация микроконтроллера
flag equ 20h ;перечисление регистров общего назначения
flag1 equ 21h ;присвоение названий адресам регистров
shet equ 22h ;
shet1 equ 23h ;
W_TEMP equ 7Eh ;
STATUS_TEMP equ 7Fh ;
#DEFINE enc1 PORTB,4 ;присвоение названий линиям ввода-вывода
#DEFINE enc2 PORTB,5 ;микроконтроллера
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
org 0000h ;начать выполнение программы с адреса 0000h
goto Start ;переход на метку Start
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;Подпрограмма обработки прерываний
org 0004h ;начать выполнение подпрограммы с адреса 0004h
movwf W_TEMP ;сохранение значений ключевых регистров
swapf STATUS,W ;
clrf STATUS ;
movwf STATUS_TEMP ;
btfsc enc1 ;опрос состояний выводов энкодера и сохранение
bsf flag,0 ;полученных значений в регистр flag
btfss enc1 ;сохранение значения вывода enc1 в 0-й бит
bcf flag,0 ;сохранение значения вывода enc2 в 1-й бит
btfsc enc2 ;
bsf flag,1 ;
btfss enc2 ;
bcf flag,1 ;
btfss flag,2 ;проверка предыдущего состояния выводов
goto vih ;энкодера (2-й и 3-й биты регистра flag)
btfss flag,3 ;если оба значения не равны 1 переходим
goto vih ;на метку vih, для выхода из обработчика
btfss flag1,0 ;проверка флага (0-й бит регистра flag1)
goto i2 ;инкремента/декремента регистра shet
incf shet1,F ;если флаг не установлен-переходим (метка i2)
movlw . 3 ;на проверку факта поворота ручки энкодера
3 ;на проверку факта поворота ручки энкодера
xorwf shet1,W ;при установленном флаге инкрементируем
btfss STATUS,Z ;регистр shet1, проверяем на равенство
goto vih ;числу 3, если не равно-переходим на метку
bcf flag1,0 ;vih, для выхода из обработчика
clrf shet1 ;если shet1 равен 3-очищаем регистр и
;сбрасываем флаг инкремента/декремента
;регистра shet
i2 btfsc flag,0 ;определение направления вращения ручки
goto i1 ;энкодера, если enc1=1 переходим на метку i1
btfss flag,1 ;если enc1=0 и enc2=1 произошел поворот
goto vih ;в положительную сторону (условно)
;соответственно далее по ходу кода производим
;инкремент регистра shet
;состояние enc1=0 и enc2=0 игнорируется-
;переходом на метку выхода vih
incf shet,F ;инкемент регистра shet, максимальное значение
movlw .0 ;ограничивается на уровне 255
xorwf shet,W ;
btfss STATUS,Z ;
goto vih2 ;
movlw .255 ;
movwf shet ;
goto vih2 ;переход на метку vih2
i1 btfsc flag,1 ;определение направления вращения ручки
goto vih ;энкодера, если enc1=1 и enc2=0 произошел
;поворот в отрицательную сторону (условно)
;соответственно далее по ходу кода производим
;декремент регистра shet
;состояние enc1=1 и enc2=1 игнорируется-
;переходом на метку выхода vih
decf shet,F ;декремент регистра shet, минимальное значение
movlw . 255 ;ограничивается на уровне 0
255 ;ограничивается на уровне 0
xorwf shet,W ;
btfss STATUS,Z ;
goto vih2 ;
clrf shet ;
vih2 bsf flag1,0 ;установка флага инкремента/декремента регистра shet
bsf flag1,1 ;установка флага регистрации поворота энкодера
;для дальнейшего опроса в основной программе
vih rlf flag,F ;сдвиг содержимого регистра flag
rlf flag,F ;влево на 2 бита
bcf INTCON,T0IF ;сброс флага прерывания по переполнению TMR0
movlw .15 ;запись числа 15 в регистр таймера TMR0
movwf TMR0 ;равнозначно временной задержке примерно 1мс
swapf STATUS_TEMP,W ;восстановление содержимого ключевых регистров
movwf STATUS ;
swapf W_TEMP,F ;
swapf W_TEMP,W ;
;
retfie ;выход из подпрограммы прерывания
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;Основная программа
Start movlw b’00000000′ ;запись нулей в выходные защелки порта B
movwf PORTB
movlw b’00000111′ ;выключение компараторов
movwf CMCON
bsf STATUS,RP0 ;настройка линий ввода\вывода порта B
movlw b’00110111′
movwf TRISB
;запись двоичного числа 11010001 в регистр
movlw b’11010001′ ;OPTION_REG, тем самым устанавливаем внутренний
movwf OPTION_REG ;источник тактового сигнала для TMR0
bcf STATUS,RP0 ;включаем предделитель перед TMR0
;устанавливаем коэффициент предделителя 1:4
clrf shet ;очистка дополнительных регистров
clrf shet1 ;
clrf flag1 ;
clrf TMR0 ;очистка регистра таймера TMR0
bcf INTCON,T0IF ;сброс флага прерывания по переполнению TMR0
bsf INTCON,T0IE ;разрешение прерываний по переполнению TMR0
bsf INTCON,GIE ;глобальное разрешение прерываний
a1 btfss flag1,1 ;опрос флага регистрации поворота энкодера
goto a1 ;флаг регистрации равен нулю: переход на метку a1
bcf flag1,1 ;флаг равен единице: сброс флага регистрации
movf shet,W ;вывод содержимого регистра shet на цифровое
call vivod ;табло
goto a1
. ……………. ;подпрограммы вывода содержимого
……………. ;подпрограммы вывода содержимого
…………….. ;регистра shet на семисегментные индикаторы
…………….. ;
end ;конец всей программы
;</p16f628a>
Принцип работы инкрементального энкодера | MegaSensor.com
Описание работы инкрементального энкодера, квадратура выходных сигналов, особенности механического сопряжения, особенности оптической и магнитной технологии.
Что такое инкрементальный энкодер?
Импульсный (пошаговый) энкодеротносится к типу энкодеров, которые предназначены для указания направления движения и/или углового перемещения внешнего механизма. Пошаговый (также именуемый инкрементный или инкрементальный) энкодер формирует импульсы, количество которых соответствует повороту вала на определенный угол. Этот тип энкодеров, в отличие от абсолютных, не формирует код положения вала, когда вал находится в покое.
Пошаговый энкодер связан со счетным устройством, это необходимо для подсчета импульсов и преобразования их в меру перемещения вала.
Конструкция инкрементального энкодера
Диск с метками оптического инкрементного энкодераИнкрементальный энкодер (он же пошаговый энкодер) состоит из следующих компонентов: источника света, диска с метками, фототранзисторной сборки и схемы обработки сигнала. Диск пошагового энкодера подразделен на точно позиционированные отметки. Количество отметок определяет количество импульсов за один оборот. К примеру, если диск поделен на 1000 меток, тогда за 250 импульсов вал должен повернуться на 90 градусов.
Технология (оптическая и магнитная)В настоящее время широко распространены две технологии исполнения — оптическая и магнитная.
1. В оптическом энкодере первичным датчиком сигнала является оптический диск (как на картинке выше). Количество черных/прозрачных секторов на диске определяет разрешение оптического инкрементального энкодера, также именуемое как количество меток в обороте.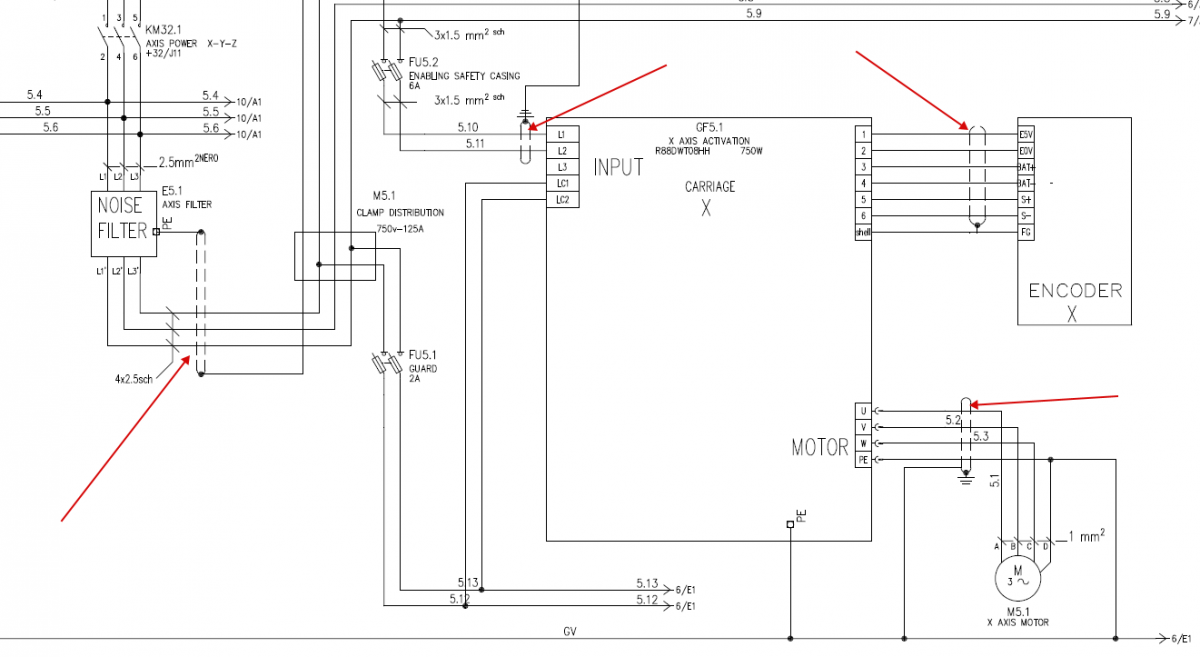
2. В настоящее время становятся очень популярными магнитные энкодеры. В магнитном энкодере сигнал положения вала формируется датчиком Холла. Данная технология открывает новые возможности, например, программируемое количество импульсов в обороте, причем некоторые производители энкодеров предоставляют такую возможность (программирования) самому Заказчику, что значительно облегчает подбор энкодера для своей конкретной задачи. Так, например, стало простой задачей заменить в оборудовании вышедший из строя энкодер с «экзотическим» числом импульсов в обороте, например, 1234 вместо более привычных 1024. В оптическом энкодере такое разрешение, как упоминалось выше, возможно только при «физическом» наличии нанесенных на диск меток.
Для квадратуры выхода энкодера используются два выходных канала, для того чтобы определить — вращается вал по часовой стрелке или против часовой стрелки, основанное на сдвиге фазы 90°±0° , допуск ±45° — приемлемый для спецификации сдвига фазы. Энкодер с единственным выходом (A) более известен как тахометр.
Максимальная частота ответаМаксимальная частота ответа является частотой, при которой вращающийся энкодер может дать электрический ответ. Такая частота имеет отношение к количеству выходных импульсов, на которые энкодер реагирует в секунду. Следовательно, энкодер пошагового типа должен удовлетворить следующее отношение:
(rpm/60) x (разрешение) ≤ максимальной частоты ответа.
В энкодере, имеющем этот выход, импульс на этом выходе появляется в каждом обороте вала. Функция показателя нуля может использоваться для сброса внешне связанного счетчика или для регистрации начальной (нулевой) позиции.
Функция оповещения Light reserve warning
Опциональная функция оповещения о снижении интенсивности (старении) светодиода подсветки считывающей матрицы энкодера.
В таких энкодерах имеется специальный выход (ножка разъема) именуемая «Light reserve warning» (в англ. документации) или «Frühwarnausgang» (в нем. документации). При снижении яркости свечения до критического уровня (когда возникает вероятность сбоя в работе энкодера) на этом выходе появляется предупреждающий положительный потенциал (например, +5V). Это позволяет своевременно принять меры и подумать о замене энкодера. Однако эта опция очень редко используется клиентами. К тому же параметры долговечности / стабильности светоизлучения светодиодов последние годы значительно улучшились в связи с чем данная опция вообще потеряла актуальность и практически больше не предлагается производителями энкодеров.
— это количество выходных импульсов за вращение вала.
Соединительный валДля механического соединения вала датчика с внешним механизмом следует использовать специальный гибкий соединитель (эластичную муфту), который предназначен для компенсации возможного биения валов, как в радиальном, так и в осевом направлении. Это позволяет резко снизить вероятность преждевременного износа подшипников вала датчика. Уже незначительный, возникший в осевом направлении вала, люфт может привести к полному электрическому отказу энкодера. Это связано с тем, что для достижения высокого разрешения, оптический диск и считывающая матрица располагаются в непосредственной близости друг от друга и минимальное осевое биение вала может привести к их механическому контакту, что в последствии приведет к разрушению нанесенных на диск меток.
Датчики скорости или энкодер — опция доработки электродвигателя
- Главная
- Доработка двигателей
- Датчики скорости
Инкрементальный энкодер Liene&Linde серии 861
Энкодер серии Liene&Linde 861 предназначен для эксплуатации в тяжелых условиях. Данный энкодер имеет сверхпрочный корпус, электрически изолированный полый вал, класс защиты IP65, выходы энкодера защищены от короткого замыкания.
Схема подключения
| Функция | Клемы | Кабель |
|---|---|---|
| + Е Volt | 1 | Красный |
| 0 Volt | 2 | Голубой |
| 0 | 3 | Коричневый |
| 0 (GND*) | 4 | Фиолетовый |
| 1 | 5 | |
| Т (GND*) | 6 | Белый |
| 2 | 7 | Желтый |
| 2 (GND*) | 8 | Черный |
| Корпус | Экран |
* — 3-х канал, выход
Механические характеристики
| Изолированный полый вал: Ø 12,16 мм | |
|---|---|
| Момент инерции | 55 х 10 -6 кгм2 |
| Макс, нагрузка на вал | |
| Осевая | 300 Н |
| Радиальная | 100 Н |
| Макс, скорость | 4000 об/ мин |
| Диск | Расширенный температурный диапазон |
| Температура | |
| Рабочая | -20° С … +80° С |
| Хранения | -25° С … +80° С (+105° С макс. 1 час) |
| Корпус | Анодированный алюминий |
| Вес | 1300 г |
| Класс защиты | IP 65, согласно IEC 529 |
| Виброустойчивость | < 100 м/с2 (50…2000 Гц) |
| Ударопрочность | <1000 м/с2 (11 мс) |
| Кабель | 10 x 0,25мм2 витая пара ПВХ (не для ADS) |
Электрические характеристики
| Напряжение питания +EV | 9-ЗО В | 5 В ± 10% |
|---|---|---|
| Защита от переполюсовки | — | |
| Потребление тока без нагрузки | 60 мА при 24 В Макс.  80 мА 80 мА | 85 мА Макс. 155 мА |
| Количество меток (на выбор) | 1000, 1024, 2048, 4096, 5000 | |
| Шаги измерения | 4 х кол-во импульсов | |
| Погрешность | ||
| Макс, ошибка | ± 50° электр. | |
| Раздел. Последоват. | 90° ± 25° электр | |
| Выход | Высокоток. HTL | RS-422, TTL |
| Защита от короткого замыкания | ||
| Макс, нагрузка | ± 40 мА | ± 20 мА |
| Макс, длина кабеля | 350м при 100 кГц | 1 км (TIA/EIA-422-B) |
| Uмакс (при нагрузке 10 мА) | > +EV — 4,0 В | >3,0 В |
| Uмин (при нагрузке 10 мА) | <2,5 В | < 1,15 В |
| Диапазон частоты | 0…100 кГц | 0…200 кГц |
| Опции | Система самодиагностики ADS | |
| Выход «авария» | Оптопара | |
| Норма | Цепь замкнута: Vce<2V при 10m | |
| Ошибка | Цепь разомкнута: мин. 500 мс | |
| Макс, напряжение | 35 В | |
| Макс, ток | 30 мА | |
| Протокол связи | RS-232 Макс, длина кабеля 10м | |
В коде заказа исполнение электродвигателя со встроенным энкодером Liene&Linde серии 861 (HTL-тип, 10-ЗОВ, 1024 имп/об, 6 каналов) обозначается «И1» в блоке III. Установка энкодера Liene&Linde серии 861 с другими характеристиками обозначается «И9» в блоке III и требует согласования с производителем.
Инкрементальный энкодер HOG10
Энкодер HOG10 предназначен для эксплуатации в тяжелых условиях. Данный энкодер имеет прочный корпус, электрически изолированный полый вал, класс защиты IP66, выходы энкодера имеют защиту от ошибочного подключения.
Технические параметры
| Наименование параметра | Значение |
|---|---|
| Напряжение питания | +9…+30В (HTL-тип) |
| +5 В ±5% (TTL-тип) | |
| Потребляемый ток без нагрузки | 100 мА |
| Количество импульсов на оборот | 1…2500 |
| Выхода | A, A/,B,B/,Z,Z/ |
| Диаметр изолированного полого вала | Ø 12,14,16 мм — цилиндр Ø 17 мм — конус 1:10 |
| Крутизна фронта импульсов | 10 В/мкс |
| Максимальная частота | 120 кГц |
| Максимальная скорость вражения | 6000 Об/мин |
| Диапазон рабочих температур | -20…+100 °С |
| Степень защиты | IP66 |
| Максимальная радиальная нагрузка на вал | 150 Н |
| Максимальная осевая нагрузка на вал | 80 Н |
| Момент инерции | 34х106 кгм2 |
| Виброустойчивость | <100 м/с2 (10…2000Гц) |
| Тип ввода | М 16×1,5 |
| Вес | 1,6 кг |
Схема подключения
| Функция | Клеммы |
|---|---|
| +Uпит | 9 |
| GND | 8 |
| А (К1) | 7 |
| А/ (/К1) | 6 |
| В (К2) | 5 |
| B/ (/К2) | 4 |
| Z (K0) | 3 |
| Z// (KO) | 2 |
| Экран | 1 |
В коде заказа исполнение электродвигателя со встроенным энкодером HOG10 (HTL-тип, 10-ЗОВ, 1024 имп/об, 6 каналов) обозначается «И2» в блоке III. Установка энкодера HOG10 с другими характеристиками обозначается «И9» в блоке III и требует согласования с производителем.
Инкрементальный энкодер DFS60
Энкодер DFS60 предназначен для общепромышленных механизмов. Данный энкодер имеет электрически изолированный полый вал и класс защиты IP65.
Технические параметры
| Наименование параметра | Значение |
|---|---|
| Напряжение питания | 4,5…5,5В, TTL/RS422 |
| 10…32В, HTL/push-pull | |
| Потребляемый ток нагрузки | 60 мА |
| Количество импул ьсов на оборот | 1… 10000 |
| Выхода | А, /А, В, /В, Z, /Z |
| Максимальная частота | 600 кГц |
| Максимальная скорость вращения | 9000 Об/мин |
| Диапазон рабочих температур | -40…+100 °С |
| Степень защиты | IP65 |
| Стойкость к ударам | 70г/6мс |
| Стойкость к вибрациям | Зг/10…2000Гц |
| Угловой ускорение | 5 х 105 рад/с2 |
| Тип ввода | Разъем М23 или 8-ми жильный кабель |
| Вес | 0,2 кг |
Схема подключения
| Функция | Клеммы разъема М23 | Цвет провода |
|---|---|---|
| /А | 6 | Коричневый |
| А | 5 | Белый |
| /B | 1 | Черный |
| B | 8 | Розовый |
| /Z | 4 | Желтый |
| Z | 3 | Сиреневый |
| GND | 10 | Синий |
| +Uпит | 12 | Красный |
| Экран | Корпус | Экран |
В коде заказа исполнение электродвигателя со встроенным энкодером DFS60 (HTL-тип, 10-ЗОВ, 1024 имп/об, 6 каналов) обозначается «ИЗ» в блоке III. Установка энкодера DFS60 с другими характеристиками обозначается «И9» в блоке III и требует согласования с производителем.
Доработка электродвигателей
Рекомендации по подключению энкодера| Схема подключения энкодера Dynapar
Схемы подключения энкодерамогут быть уникальными для каждого энкодера, и необходимо следовать схеме или разводке выводов, указанным в техническом описании энкодера. Проводка многоканального дифференциального энкодера с коммутационными дорожками может иметь до 14 проводов, и неправильное подключение может привести к проблемам с сигналом, таким как искаженные импульсы, низкая амплитуда сигнала и закороченные соединения.
Пример закороченных проводов A и B (1 и 2 на схеме), что привело к искажению формы импульса на обоих каналах
Снижение шума сигнала
Оптический энкодер не может работать как устройство обратной связи без проводки.Проблема в том, что провода действуют как антенны, что позволяет им принимать излучаемые сигналы от близлежащих источников; чем длиннее провод энкодера, тем сильнее эффект. В средах с сильными электромагнитными помехами (EMI) в первую очередь следует учитывать применение методов блокирования шума. Кабели энкодера следует прокладывать в кабелепроводах, желательно отдельно от других проводов. Если это невозможно, их следует использовать только с другими маломощными кабелями постоянного тока. Сигнальные провода должны располагаться на расстоянии не менее 1 фута от силовых кабелей.
Экранирование важно. Как минимум, кабель должен быть защищен либо оболочкой из фольги с заземляющим проводом, либо экраном из плетеной проволоки. Для очень чувствительных приложений или сред с высоким уровнем электромагнитных помех следует использовать провода с фольгированной оболочкой в сочетании с общим экраном из плетеной проволоки вокруг кабеля.
Заземляющие провода датчика положения
Важно применять правильные методы заземления. Корпус энкодера и кабель / разъем энкодера не должны быть заземлены.Энкодеры Dynapar обычно имеют приспособления для заземления корпуса через разъем / кабель, если заземление не может быть закреплено на монтажном кронштейне / заземлении машины.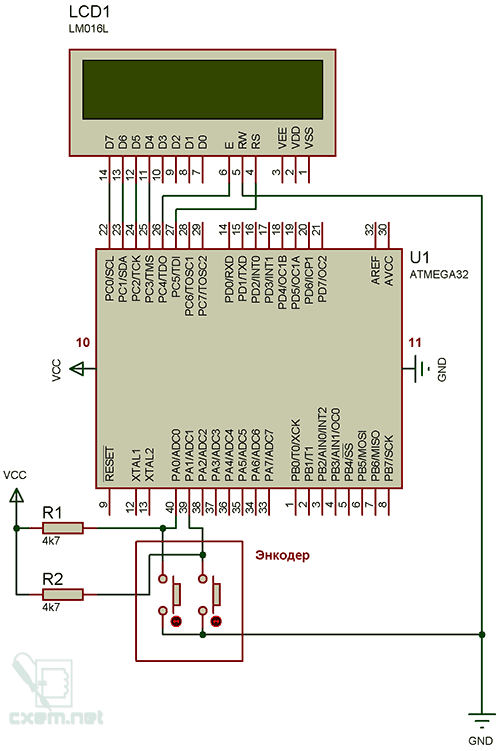
Заземлите кабель только на одном конце. Заземление в нескольких точках может создать контуры заземления, которые могут привести к помехам, вызванным переменным током. Лучше всего заземлить его через разъем, в идеале со стороны привода, если привод заземлен.
В промышленных условиях сильноточные потоки создаются двигателями, переключателями дистанционного управления и магнитными полями.Это может привести к изменению электрических потенциалов в разных точках заземления. Чтобы избежать проблем, заземлите экран кабеля энкодера вместе со всеми другими частями системы, требующими заземления, из одной точки на конце прибора, как показано.
Предотвращение токов на валу двигателя
Преобразователи частоты могут наводить токи на валу, роторе и корпусе двигателя. Это результат высокой частоты переключения частотно-регулируемых приводов. Токи проходят через подшипники, что может повредить шарики внутри дорожек качения.
Важно изолировать энкодер от токов вала. Это можно сделать с помощью заземляющих щеток, которые непосредственно контактируют с валом двигателя. Вал, в свою очередь, соединяется с корпусом двигателя, так что любые индуцированные токи идут прямо к корпусу двигателя. Это одинаково защищает подшипники как энкодера, так и двигателя.
Методы заземления подшипников включают:
- Изолированные подшипники
- Токопроводящая смазка для разгрузки подшипников нагнетания
- Изолированные вставки для монтажа энкодеров с полым валом, включая изолирующие шайбы и нейлоновые шайбы
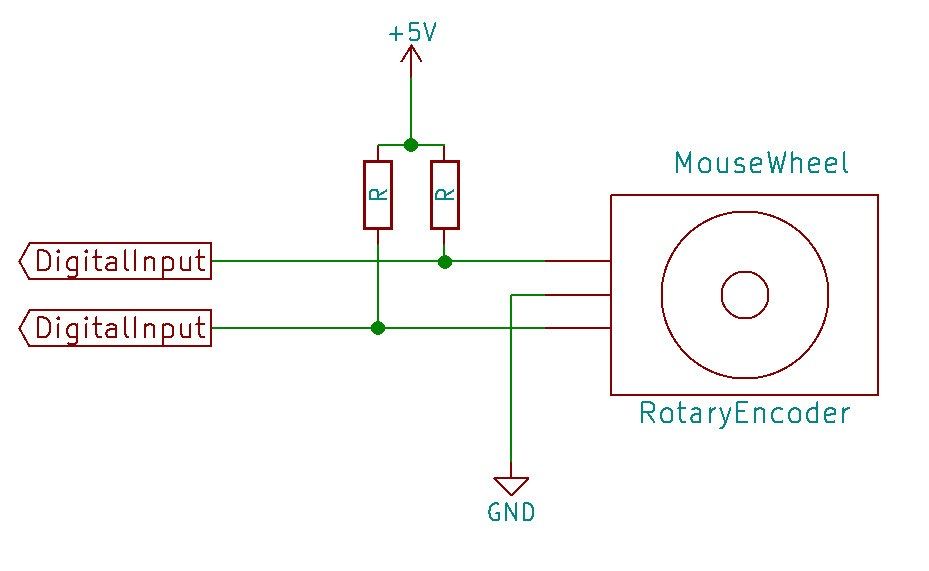
Как можно подключить инкрементальный энкодер к системе управления движением?
Есть два способа подключить инкрементный энкодер к системе.Один – несимметричный, а другой – дифференциальный.
При несимметричном подключении каждому каналу требуется только один провод. Каналы – это любые потоки данных, создаваемые кодировщиком. Например, у обычного квадратурного энкодера есть два канала – A и B – для отслеживания скорости, а также направления вращения… поэтому для него нужны два провода в несимметричной проводке.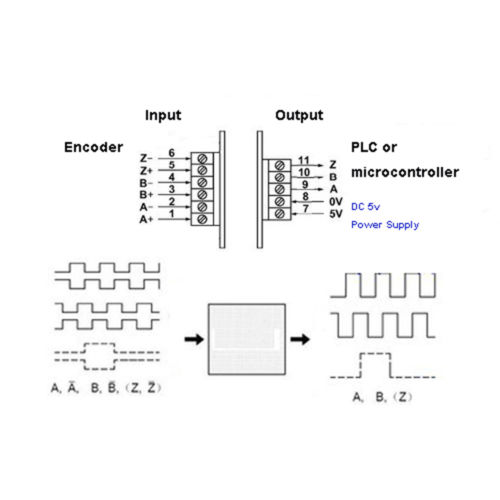
Дифференциальная проводка требует двух проводов на канал, которые ссылаются друг на друга. То есть по проводам передаются сигналы, сдвинутые по фазе на 180 °. Чтобы проиллюстрировать, другие инкрементальные кодеры имеют три канала передачи данных – A, B и Z для индексации по заданному значению. Такой энкодер с дифференциальной разводкой имеет всего шесть проводов, и пары проводов каждого канала подают сдвоенные сигналы на контроллер, который отбрасывает ошибки для очистки входа.
Каждый способ электромонтажа имеет свои достоинства и недостатки.Несимметричная проводка обычно является более дешевым вариантом. Это связано с тем, что в несимметричной проводке используется один провод на канал, один конец которого подключен к энкодеру, а другой – к системе ввода-вывода контроллера. Однако он подходит только для коротких проводов. Это потому, что там, где кодировщику требуется более длинный провод – скажем, в приложении, которое находится глубоко внутри части оборудования, – несимметричная проводка более восприимчива к помехам. Тем не менее, несимметричную проводку реализовать легко, поскольку на каждый канал приходится только один провод и общее заземление.
Дифференциальная проводка более устойчива к помехам. Его проводка состоит из витой пары экранированных проводов с дополнительными сигналами.
Это означает, что дифференциальная проводка лучше подходит для более длинных кабелей, поскольку она подавляет синфазные помехи. Под синфазным режимом понимаются любые помехи, передаваемые по всем проводникам. Он легко отклоняется в дифференциальной проводке, потому что сигнал и его дополнение могут быть отправлены вместе, что позволяет легко устранить любые помехи. Основным недостатком дифференциальной проводки является ее более высокая стоимость и количество подключений… поскольку для каждого канала требуется два провода. Это означает, что также больше возможностей для неисправностей.
Это означает, что также больше возможностей для неисправностей.
Выбор наиболее подходящей проводки зависит от потребности в более протяженной проводке, помехоустойчивости, контроля затрат и времени между отказами.
Инкрементальные энкодеры, подобные этим от AMATEK Pittman Motors, становятся все более компактными. Это означает, что проводка составляет большую часть общей массы, независимо от того, какой метод используется.При выборе способа подключения энкодеров к системе управления движением учитывайте требования приложения.Если конструкция требует только коротких кабелей в среде, в основном свободной от помех, то нет смысла использовать более дорогостоящую дифференциальную проводку. Однако, если габариты машины требуют использования кабеля большой длины или существует риск помех со стороны окружающей среды, то дифференциальная проводка в порядке. Хотя это дороже и требует большего количества материалов, это предотвратит потерю сигнала и головные боли, связанные с помехами.
Для получения дополнительной информации читайте:
PDF Загрузить с Dynapar: Простота подключения энкодера
Qunatum Devices: какие провода инкрементного энкодера мне следует использовать?
Электромонтаж для электроники спектрографа ESI Руководство
Электромонтаж для электроники спектрографа ESIESI Руководство по электронике спектрографа
Электропроводка:
Раздел руководства по электромонтажу содержит описания различных схем сцены для Спектрограф и имидж-сканер Эшелетт, ESI.Это соответствует вкладка проводки в папке электронных схем.
Щелевое колесо маски Сценическая проводка, EL-3350, листы 1 и 2, и EL-3351
EL-3350
Упрощенная схема сцены
Схемы EL-3350 и EL-3351 показывают подключение ступени щелевой маски.
Колесо фильтров и Ступени колеса диафрагмы подключены идентично проводке за исключением номеров контактов, с помощью которых они подключаются к Контроллер Galil.Объясняются связи в Galil. в разделе “Сигналы” этого руководство.
Глядя на лист 1 EL-3350, правый край схемы показывает серводвигатель и это кодировщик. В середине рисунка изображения сценического межсоединения EL-1238 Коробка (внутри пунктирных линий) и установлен усилитель Galil. панель разъемов. В левой части рисунка показан Контроллер и усилитель Galil.Серводвигатель является стандартным Мотор Галил 50-1000. Он рассчитан на 10,8 унций на дюйм (30 унций на дюйм). пик) крутящего момента, а его энкодер имеет 1000 отсчетов в квадратуру, которую контроллер декодирует до 4000 отсчетов на революция. В случае трех ступеней колеса двигатель энкодер подключен к вспомогательному входу энкодера на Galil контроллер. Это означает, что на этапе используется двухконтурный кодирование. Проводка соединительной коробки ступеней меняет местами двигатель. сигналы энкодера с сигналами датчика линейных перемещений Renishaw, так что что сервоконтур замкнут вокруг энкодера Renishaw в вместо энкодера двигателя.(также см. EL-3351).
В отличие от большинства других ступеней, щелевая маска Stage использует магнитный индекс для создания HOME сигнал. Поскольку это неограниченный вращающийся этап, первичный и вторичный FWD и REV лимиты не реализуются. С магнитным репером программное обеспечение может искать край флага ‘Home’ до нуля из буфера счетчика кодировщика.Процесс на самом деле немного больше, чем это, и рассматривается во Введении раздел.
Сценический межблочный переходник EL-1238 коробка подключена для передачи информации о положении и двигателе мощность.
Электропитание двигателя подключено к двум комплектам витые пары в сценическом кабеле между усилителем Galil коммутационная панель и соединительная коробка сцены. Скрученный пары – провода калибра 22 AWG.Две пары связаны вместе на клеммах в коробке EL-1238 и проводах AWG 18 калибра подключитесь к двигателю через контакты 1 и 2 JB2.
10-контактный плоский ленточный кабель от сервопривода энкодер двигателя подключается непосредственно к буферу энкодера EL-2260 плата, установленная внутри соединительной коробки. (Это та же доска используется в DEIMOS и HIRES). К несчастью, чтобы отсоединить этот кабель, необходимо снять крышку с коробка.Питание этой платы происходит от логического блока. устанавливается на монтажную пластину контроллера Galil. + 5В и заземления подведены к блоку EL-1238 через контакты 11 и 12. выход буферной платы энкодера подключен к клеммная колодка внутри соединительной коробки 10-контактным плоский ленточный кабель. В случае двухконтурного кодирования ступени, сигналы энкодера двигателя покидают соединительную коробку через JB5 и подключить к панели разъемов усилителя Galil через вход вспомогательного энкодера на J21.
Вверху по центру листа 1 находятся подключения к источнику питания логики. Все они подключены внутри панели разъемов от контактов на сценическом кабеле разъемы к контактам на большом разъеме J10 с черным и красные провода. Эти провода идут от длинных клеммных колодок на панель Galil. Оттуда перейдите к источнику питания логики. Рядом с разъемами питания логики находится разъем от источника питания Лямбда + 28В.Это сила, которая подается на усилители для работы серводвигателей. На Левая часть чертежа – это блок контроллера. В показаны соединения между контроллером и усилителем сделаны через плоские ленточные кабели.
EL-3350 Лист 2 определяет кабели и разъемы, используемые на каждой из ступеней с приводом от двигателя.
EL-3351 Стенд для щелевой маски Электропроводка энкодера
Упрощенная схема кодировщика
На этом чертеже показана проводка для Линейный энкодер Renishaw.Кодировщик Renishaw используется для замкните сервоконтур ступеней колеса и коллиматора. В кодировщик находится на правой стороне листа. Рядом находится коммутационная коробка для этой ступени – это та же коробка, показанная на схеме EL-3350. Кабель кодировщика подключается к коробке через разъем DB15 JB4. Сигналы затем разделяются, чтобы перейти к контроллеру Galil через этап кабель J1 и кабель вспомогательного энкодера через J21.В Сигналы энкодера Renishaw подключаются к энкодеру оси двигателя. входы, чтобы замкнуть серво-контур. Мощность энкодера составляет питание от подключений к питанию логики через контакты J10 49 и 17. Индексный сигнал подключен к HOMEA . вход для этой оси.
ступенчатое колесо фильтра Электропроводка, EL-3352, и проводка энкодера, EL-3353
Упрощенная схема сцены
EL-3352
Схемы EL-3352 и EL-3353 показывают проводка ступени Filter Wheel.Щелевая маска и Ступени колеса диафрагмы подключены идентично проводке за исключением номеров контактов, с помощью которых они подключаются к Контроллер Galil. Объясняются связи в Galil. в разделе “Сигналы” этого руководство.
Глядя на EL-3352, правый край Сторона схемы показывает серводвигатель и его энкодер.
В середине чертежа представлены изображения сценического межсоединения EL-1238. Коробка (внутри пунктирных линий) и установлен усилитель Galil. панель разъемов.В левой части рисунка показан Контроллер и усилитель Galil. Серводвигатель является стандартным Мотор Галил 50-1000. Он рассчитан на 10,8 унций на дюйм (30 унций на дюйм). пик) крутящего момента, а его энкодер имеет 1000 отсчетов в квадратуру, которую контроллер декодирует до 4000 отсчетов на революция. В случае трех ступеней колеса двигатель энкодер подключен к вспомогательному входу энкодера на Galil контроллер. Это означает, что на этапе используется двухконтурный кодирование.Проводка соединительной коробки ступеней меняет местами двигатель. сигналы энкодера с сигналами датчика линейных перемещений Renishaw, так что что сервоконтур замкнут вокруг энкодера Renishaw в вместо энкодера двигателя. (также см. EL-3353).
В отличие от большинства других ступеней, Колесо фильтров Stage использует магнитный индекс для создания HOME сигнал. Поскольку это неограниченный вращающийся этап, первичный и вторичный FWD и REV лимиты не реализуются.С магнитным репером программное обеспечение может искать край флага ‘Home’ до нуля из буфера счетчика кодировщика. Процесс на самом деле немного больше, чем это, и рассматривается во Введении раздел.
Соединительная коробка ступеней EL-1238 подключена для передачи информации о местоположении и мощности двигателя. Сила для двигателя подключен к двум парам витых пар в сценический кабель между коммутационной панелью усилителя Galil и соединительная коробка сцены.Витые пары AWG Провод 22 калибра. Две пары связаны между собой в клеммы в коробке EL-1238 и провода AWG 18 калибра соединяются к двигателю через контакты 1 и 2 JB2.
10-контактный плоский ленточный кабель от сервопривода энкодер двигателя подключается непосредственно к буферу энкодера EL-2260 плата, установленная внутри соединительной коробки. (Это та же доска используется в DEIMOS и HIRES). К несчастью, чтобы отсоединить этот кабель, необходимо снять крышку с коробка.Питание этой платы происходит от логического блока. устанавливается на монтажную пластину контроллера Galil. + 5В и заземления подведены к блоку EL-1238 через контакты 11 и 12. выход буферной платы энкодера подключен к клеммная колодка внутри соединительной коробки 10-контактным плоский ленточный кабель. В случае двухконтурного кодирования ступени, сигналы энкодера двигателя покидают соединительную коробку через JB5 и подключить к панели разъемов усилителя Galil через вход вспомогательного энкодера на J22.
Вверху по центру листа 1 находятся подключения к источнику питания логики. Все они подключены внутри панели разъемов от контактов на сценическом кабеле разъемы к контактам на большом разъеме J10 с черным и красные провода. Эти провода идут от длинных клеммных колодок на панель Galil. Оттуда перейдите к источнику питания логики. Рядом с разъемами питания логики находится разъем от источника питания Лямбда + 28В.Это сила, которая подается на усилители для работы серводвигателей. На Левая часть чертежа – это блок контроллера. В показаны соединения между контроллером и усилителем сделаны через плоские ленточные кабели.
EL-3353 Ступень с фильтрующим колесом Электропроводка энкодера
Упрощенная схема кодировщика
На этом чертеже показана проводка для Линейный энкодер Renishaw.
Кодировщик Renishaw используется для замкните сервоконтур ступеней колеса и коллиматора. В кодировщик находится на правой стороне листа. Рядом находится коммутационная коробка для этой ступени – это та же коробка, показанная на схеме EL-3352. Кабель кодировщика подключается к коробке через разъем DB15 JB4. Сигналы затем разделяются, чтобы перейти к контроллеру Galil через этап кабель J2 и кабель вспомогательного энкодера через J22.В Сигналы энкодера Renishaw подключаются к энкодеру оси двигателя. входы, чтобы замкнуть серво-контур. Мощность энкодера составляет питание от подключений к питанию логики через контакты J10 48 и 18. Индексный сигнал подключен к HOMEB . вход для этой оси.

Колесо диафрагмы Электропроводка сцены, EL-3354, и проводка энкодера, EL-3355
Упрощенная схема сцены
EL-3354
Схемы EL-3354 и EL-3355 показывают разводка ступени Aperture Wheel.Щелевая маска и Каскады колеса фильтров имеют идентичную проводку, за исключением номеров контактов, с помощью которых они подключаются к Galil контроллер. Связи в Galil описаны в Раздел “Сигналы” этого руководство.
Глядя на EL-3354, правый край Схема показывает серводвигатель и его энкодер. в в середине чертежа изображен сценический межблочный переходник EL-1238. Коробка (внутри пунктирных линий) и установлен усилитель Galil. панель разъемов.В левой части рисунка показан Контроллер и усилитель Galil. Серводвигатель является стандартным Мотор Галил 50-1000.
Он рассчитан на 10,8 унций на дюйм (30 унций на дюйм). пик) крутящего момента, а его энкодер имеет 1000 отсчетов в квадратуру, которую контроллер декодирует до 4000 отсчетов на революция. В случае трех ступеней колеса двигатель энкодер подключен к вспомогательному входу энкодера на Galil контроллер. Это означает, что на этапе используется двухконтурный кодирование.Проводка соединительной коробки ступеней меняет местами двигатель. сигналы энкодера с сигналами датчика линейных перемещений Renishaw, так что что сервоконтур замкнут вокруг энкодера Renishaw в вместо энкодера двигателя. (также см. EL-3355).
В отличие от большинства других ступеней, диафрагма Wheel Stage использует магнитный индекс для создания HOME сигнал. Поскольку это неограниченный вращающийся этап, первичный и вторичный FWD и REV лимиты не реализуются.С магнитным репером программное обеспечение может искать край флага ‘Home’ до нуля из буфера счетчика кодировщика. Процесс на самом деле немного больше, чем это, и рассматривается во Введении раздел.
Соединительная коробка ступеней EL-1238 подключена для передачи информации о местоположении и мощности двигателя. Сила для двигателя подключен к двум парам витых пар в сценический кабель между коммутационной панелью усилителя Galil и соединительная коробка сцены.Витые пары AWG Провод 22 калибра. Две пары связаны между собой в клеммы в коробке EL-1238 и провода AWG 18 калибра соединяются к двигателю через контакты 1 и 2 JB2.
10-контактный плоский ленточный кабель от сервопривода энкодер двигателя подключается непосредственно к буферу энкодера EL-2260 плата, установленная внутри соединительной коробки. (Это та же доска используется в DEIMOS и HIRES). К несчастью, чтобы отсоединить этот кабель, необходимо снять крышку с коробка.
Питание этой платы происходит от логического блока. устанавливается на монтажную пластину контроллера Galil. + 5В и заземления подведены к блоку EL-1238 через контакты 11 и 12. выход буферной платы энкодера подключен к клеммная колодка внутри соединительной коробки 10-контактным плоский ленточный кабель. В случае двухконтурного кодирования ступени, сигналы энкодера двигателя покидают соединительную коробку через JB5 и подключить к панели разъемов усилителя Galil через вход вспомогательного энкодера на J23.
Вверху по центру листа 1 находятся подключения к источнику питания логики. Все они подключены внутри панели разъемов от контактов на сценическом кабеле разъемы к контактам на большом разъеме J10 с черным и красные провода. Эти провода идут от длинных клеммных колодок на панель Galil. Оттуда перейдите к источнику питания логики. Рядом с разъемами питания логики находится разъем от источника питания Лямбда + 28В.Это сила, которая подается на усилители для работы серводвигателей. На Левая часть чертежа – это блок контроллера. В показаны соединения между контроллером и усилителем сделаны через плоские ленточные кабели.
EL-3355 Колесо диафрагмы Электропроводка сценического энкодера
Упрощенная схема кодировщика
На этом чертеже показана проводка для Линейный энкодер Renishaw.Кодировщик Renishaw используется для замкните сервоконтур ступеней колеса и коллиматора. В кодировщик находится на правой стороне листа. Рядом находится коммутационная коробка для этой ступени – это та же коробка, показанная на схеме EL-3354. Кабель кодировщика подключается к коробке через разъем DB15 JB4.
Сигналы затем разделяются, чтобы перейти к контроллеру Galil через этап кабель J3 и кабель вспомогательного энкодера через J23.В Сигналы энкодера Renishaw подключаются к энкодеру оси двигателя. входы, чтобы замкнуть серво-контур. Мощность энкодера составляет питание от подключений к питанию логики через контакты J10 48 и 18. Индексный сигнал подключен к HOMEC . вход для этой оси.
Проводка TV Focus Stage, EL-3356
Упрощенная схема сцены
EL-3356 показывает TV Focus Stage Электропроводка.Стадия фокусировки телевизора подключена как нормальный ограниченный этап движения с использованием одного кодировщика. Связи на Galil объясняется в разделе “Сигналы” этого руководство.
Глядя на EL-3356, верхнюю правую часть Схема показывает серводвигатель и его энкодер. в в середине рисунка изображен сценический межблочный переходник EL-1236. Коробка (внутри пунктирных линий) и установлен усилитель Galil. панель разъемов.В левой части рисунка показан Контроллер и усилитель Galil. Серводвигатель является стандартным Мотор Галил 50-1000. Он рассчитан на 10,8 унций на дюйм (30 унций на дюйм). пик) крутящего момента, а его энкодер имеет 1000 отсчетов в квадратуру, которую контроллер декодирует до 4000 отсчетов на революция. На этапе кодировщик двигателя подключен к нормальный вход энкодера на контроллере Galil. Это указывает что на этапе используется одноконтурное кодирование.Сцена проводка соединительной коробки передает сигналы энкодера двигателя напрямую к контроллеру Galil.
Как и другие ступени, TV Focus Stage использует оптический прерыватель для генерации HOME сигнальные и механические первичные и вторичные концевые выключатели.
Оптический прерыватель HOME подключен к входу HOME контроллер через соединительную коробку и J4. Программное обеспечение включает оптический прерыватель путем подтверждения FIDUCIAL Сигнал ENABLE перед разрешением любого движения.Выходной сигнал OUT4 понижается, чтобы включить прерыватель. Первичные пределы показаны внизу. правая часть рисунка. Они подключены через соединительную коробку и J4 панели разъемов усилителя к FLSD ( F или ранее L imit S witch channel D ) и входы RLSD контроллера Galil. Их функция – скажите контроллеру прекратить движение вперед или обратное направление.Если любой из пределов достигнут, Контроллер Galil замедляется и останавливает движение сцена. На этом этапе вы можете выйти за пределы ограничений, но вы не может идти дальше в направлении предела. Главная и вторичные лимиты могут быть достигнуты только если по какой-то причине ограничения программного обеспечения не работают.
Вторичные пределы показаны вверху. правая часть страницы. Это переключатели DPDT, которые отключите питание двигателя и сообщите контроллеру, что они были достигнуты.Это окончательные ограничения в системы, и если сцена перемещается достаточно далеко, чтобы споткнуться о них, этап должен быть перемещен за пределы вручную. Один комплект контакты используются для прерывания пути тока двигателя, в то время как другой набор подключен параллельно, чтобы сообщить контроллеру, что этап достиг предела. Информация о направлении может быть полученные от первичных концевых выключателей.
Коллиматор Электросхема мотора фокусировки №1, листы 1 и 2 EL-3358 и EL-3359
Упрощенная схема сцены
Схемы EL-3358 и EL-3359 показывают подключение одного из трех приводных двигателей коллиматора.
Другой два соединены одинаково, за исключением контакта номера, с которыми они подключаются к контроллеру Galil. В подключения в Galil описаны в разделе «Сигналы». этого руководства.
Глядя на лист 1 EL-3358, правый край схемы показывает серводвигатель и это кодировщик. В середине рисунка изображения соединительной коробки сценического блока ЭЛ-1238 (внутри пунктирные линии) и разъем для подключения усилителя Galil панель.В левой части рисунка изображен Galil. контроллер и усилитель. Серводвигатель – стандартный Galil. 50-1000 мотор. Он рассчитан на 10,8 унций / А (пиковая 30 унций). крутящий момент, и его энкодер имеет 1000 отсчетов в квадратуре, что контроллер декодирует до 4000 отсчетов на оборот. в корпус исполнительных механизмов коллиматора, энкодер двигателя подключен ко входу вспомогательного энкодера на контроллере Galil. Этот указывает, что на этапе используется двухконтурное кодирование.В проводка соединительной коробки ступеней меняет местами сигналы энкодера двигателя с сигналами датчика линейных перемещений Renishaw, чтобы сервопривод замкнутый контур вокруг энкодера Renishaw (см. также EL-3359).
Приводы коллиматоров уникальны в прибор в том, что они используют оптические прерыватели для HOME сигнальный и первичный FWD и REV ограничения (см. EL-3358, лист 2).Это было вызвано недостаток места в зоне, доступной для установки приводов. Программное обеспечение включает прерыватели концевых выключателей, подтверждение FIDUCIAL ENABLE сигнал, прежде чем любое движение будет разрешено. Эти ограничения могут может быть достигнуто только в том случае, если по какой-либо причине ограничения программного обеспечения не работают. Если они достигнуты, сигнал поступает в Галил контроллер и контроллер останавливает движение сцены.
На этом этапе вы можете выйти за пределы ограничений, но не можете идти в направлении предела.
Вторичные пределы показаны вверху. правая часть страницы. Это переключатели DPDT, которые отключите питание двигателя и сообщите контроллеру, что они были достигнуты. Это окончательные ограничения в системы, и если сцена перемещается достаточно далеко, чтобы споткнуться о них, этап должен быть перемещен за пределы вручную. Другой секции вторичных концевых выключателей подключены параллельно поэтому они только сообщают контроллеру, что сцена достигла ограничение, но не направление.Информация о направлении может быть полученные от первичных концевых выключателей.
Соединительная коробка ступеней EL-1238 подключена для передачи информации о местоположении и мощности двигателя. Сила для двигателя подключен к двум парам витых пар в сценический кабель между соединительной коробкой и Galil панель подключения усилителя. Витые пары AWG Провод 22 калибра. Две пары связаны между собой в клеммы в коробке EL-1238 и провода AWG 18 калибра соединяются к двигателю через контакты 1 и 2 JB2.Заземление подводится к контакт 4 JB2 и контакт 3 возвращает сигнал от вторичные ограничения.
10-контактный плоский ленточный кабель от сервопривода энкодер двигателя подключается непосредственно к буферу энкодера EL-2260 доска (такая же доска используется в DEIMOS и HIRES). К сожалению, чтобы отсоединить этот кабель, крышка должна быть вынул из коробки. Питание этой платы происходит от питание логики смонтировано на монтажной плате контроллера Galil.+ 5В и земля подведены к блоку EL-1238 через контакты 11. и 12. Выход буферной платы энкодера подключен к клеммной колодке внутри соединительной коробки с помощью 10-контактный плоский ленточный кабель. В случае двойного контура кодированных ступеней, сигналы энкодера двигателя покидают соединить коробку через JB5 и подключить к усилителю Galil панель разъемов через вход дополнительного энкодера на J25.
Показана схема подключения основных пределов. на листе 2.Все оптические прерыватели – TRW OPB970T55. части. Они расположены так, как показано на схеме выше. Каждый переключатель имеет катод своего входа, подключенного к Питание +5 В через контакт 3 JB3 и через ток 390 Ом ограничивающий резистор. Анод подключен к ПИД . ВКЛЮЧИТЬ сигнал от контакта 2 JB3. Выход секция переключателя подключена к + 5В и массе сигналы от контактов 3 и 5. Выходные сигналы затем подключен следующим образом: FWD предел – контакт 8, HOME – контакт 4 и REV предел – вывод 7.
Вверху по центру листа 1 находятся подключения к источнику питания логики. Все они подключены внутри панели разъемов от контактов на сценическом кабеле разъемы к контактам на большом разъеме J10 (или 20) с черный и красный провода. Эти провода идут от длинной клеммы полоски на панели Galil. Оттуда перейти к логике источник питания. Рядом с разъемами питания логики находится подключение от источника питания Лямбда + 28В.Это мощность, которая подается на усилители для работы сервопривода моторы. В левой части рисунка находится контроллер. коробка. Показанные соединения между контроллером и усилители выполнены через плоские ленточные кабели.
EL-3359 Коллиматор Фокус Электропроводка энкодера двигателя №1
Упрощенная схема кодировщика
На этом чертеже показана проводка для Линейный энкодер Renishaw.Кодировщик Renishaw используется для замкните сервоконтур ступеней коллиматора. Кодировщик находится на правой стороне листа.
Рядом сцена соединительная коробка для этой ступени – это та же коробка, показанная на схеме EL-3358. Кабель кодировщика подключается к коробке через разъем DB15 JB4. Сигналы затем разделяются, чтобы перейти к контроллеру Galil через этап кабель J5 и кабель вспомогательного энкодера через J25.В Сигналы энкодера Renishaw подключаются к энкодеру оси двигателя. входы, чтобы замкнуть серво-контур. Мощность энкодера составляет питание от подключений к питанию логики через контакты J20 49 и 20. Индексный сигнал подключен к вспомогательному энкодеру. вход для этой оси.
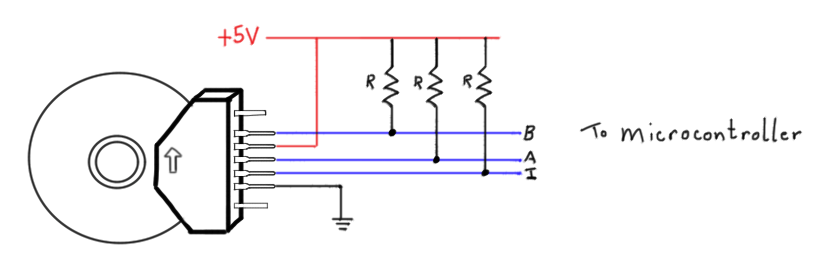
Коллиматор Электропроводка ступени мотора фокусировки №2, листы 1 и 2 EL-3360 и EL-3361
Упрощенная схема сцены
Схемы EL-3360 и EL-3361 показывают подключение одного из трех приводных двигателей коллиматора.Другой два соединены одинаково, за исключением контакта номера, с которыми они подключаются к контроллеру Galil. В подключения в Galil описаны в разделе «Сигналы». этого руководства.
Глядя на лист 1 EL-3360, правый край схемы показывает серводвигатель и это кодировщик. В середине рисунка изображения соединительной коробки сценического блока ЭЛ-1238 (внутри пунктирные линии) и разъем для подключения усилителя Galil панель.В левой части рисунка изображен Galil. контроллер и усилитель. Серводвигатель – стандартный Galil. 50-1000 мотор. Он рассчитан на 10,8 унций / А (пиковая 30 унций). крутящий момент, и его энкодер имеет 1000 отсчетов в квадратуре, что контроллер декодирует до 4000 отсчетов на оборот. в корпус исполнительных механизмов коллиматора, энкодер двигателя подключен ко входу вспомогательного энкодера на контроллере Galil.
Этот указывает, что на этапе используется двухконтурное кодирование.В проводка соединительной коробки ступеней меняет местами сигналы энкодера двигателя с сигналами датчика линейных перемещений Renishaw, чтобы сервопривод замкнутый контур вокруг энкодера Renishaw (см. также EL-3361).
Приводы коллиматоров уникальны в прибор в том, что они используют оптические прерыватели для HOME сигнальный и первичный FWD и REV ограничения (см. EL-3360, лист 2).Это было вызвано недостаток места в зоне, доступной для установки приводов. Программное обеспечение включает прерыватели концевых выключателей, подтверждение FIDUCIAL ENABLE сигнал, прежде чем любое движение будет разрешено. Эти ограничения могут может быть достигнуто только в том случае, если по какой-либо причине ограничения программного обеспечения не работают. Если они достигнуты, сигнал поступает в Галил контроллер и контроллер останавливает движение сцены. На этом этапе вы можете выйти за пределы ограничений, но не можете идти в направлении предела.
Вторичные пределы показаны вверху. правая часть страницы. Это переключатели DPDT, которые отключите питание двигателя и сообщите контроллеру, что они были достигнуты. Это окончательные ограничения в системы, и если сцена перемещается достаточно далеко, чтобы споткнуться о них, этап должен быть перемещен за пределы вручную. Другой секции вторичных концевых выключателей подключены параллельно поэтому они только сообщают контроллеру, что сцена достигла ограничение, но не направление.Информация о направлении может быть полученные от первичных концевых выключателей.
Соединительная коробка ступеней EL-1238 подключена для передачи информации о местоположении и мощности двигателя.
Сила для двигателя подключен к двум парам витых пар в сценический кабель между соединительной коробкой и Galil панель подключения усилителя. Витые пары AWG Провод 22 калибра. Две пары связаны между собой в клеммы в коробке EL-1238 и провода AWG 18 калибра соединяются к двигателю через контакты 1 и 2 JB2.Заземление подводится к контакт 4 JB2 и контакт 3 возвращает сигнал от вторичные ограничения.
10-контактный плоский ленточный кабель от сервопривода энкодер двигателя подключается непосредственно к буферу энкодера EL-2260 доска (такая же доска используется в DEIMOS и HIRES). К сожалению, чтобы отсоединить этот кабель, крышка должна быть вынул из коробки. Питание этой платы происходит от питание логики смонтировано на монтажной плате контроллера Galil.+ 5В и земля подведены к блоку EL-1238 через контакты 11. и 12. Выход буферной платы энкодера подключен к клеммной колодке внутри соединительной коробки с помощью 10-контактный плоский ленточный кабель. В случае двойного контура кодированных ступеней, сигналы энкодера двигателя покидают соединить коробку через JB5 и подключить к усилителю Galil панель разъемов через вход дополнительного энкодера на J26.
Показана схема подключения основных пределов. на листе 2.Все оптические прерыватели – TRW OPB970T55. части. Они расположены так, как показано на схеме выше. Каждый переключатель имеет катод своего входа, подключенного к Питание +5 В через контакт 3 JB3 и через ток 390 Ом ограничивающий резистор. Анод подключен к ПИД . ВКЛЮЧИТЬ сигнал от контакта 2 JB3. Выход секция переключателя подключена к + 5В и массе сигналы от контактов 3 и 5. Выходные сигналы затем подключен следующим образом: FWD предел – контакт 8, HOME – контакт 4 и REV предел – вывод 7.
Вверху по центру листа 1 находятся подключения к источнику питания логики. Все они подключены внутри панели разъемов от контактов на сценическом кабеле разъемы к контактам на большом разъеме J20 с черным и красные провода. Эти провода идут от длинных клеммных колодок на панель Galil. Оттуда перейдите к источнику питания логики. Рядом с разъемами питания логики находится разъем от источника питания Лямбда + 28В.Это сила, которая подается на усилители для работы серводвигателей. На Левая часть чертежа – это блок контроллера. В показаны соединения между контроллером и усилителем сделаны через плоские ленточные кабели.
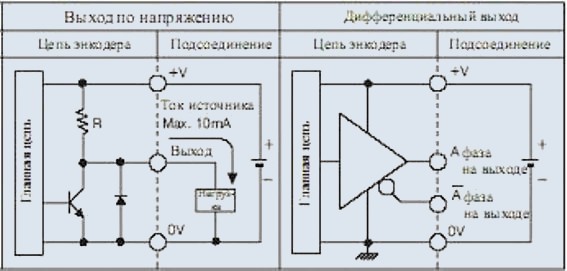
Электропроводка электродвигателя фокусировки коллиматора № 2 EL-3361
Упрощенная схема кодировщика
На этом чертеже показана проводка для Линейный энкодер Renishaw.Кодировщик Renishaw используется для замкните сервоконтур ступеней коллиматора. Кодировщик находится на правой стороне листа. Рядом сцена соединительная коробка для этой ступени – это та же коробка, показанная на схеме EL-3358. Кабель кодировщика подключается к коробке через разъем DB15 JB4. Сигналы затем разделяются, чтобы перейти к контроллеру Galil через этап кабель J6 и кабель вспомогательного энкодера через J26.В Сигналы энкодера Renishaw подключаются к энкодеру оси двигателя. входы, чтобы замкнуть серво-контур. Мощность энкодера составляет питание от подключений к питанию логики через контакты J20 49 и 20. Индексный сигнал подключен к вспомогательному энкодеру. вход для этой оси.
Коллиматор Электросхема мотора фокусировки №3, листы 1 и 2 EL-3362 и EL-3363
Упрощенная схема сцены
Схемы EL-3362 и EL-3363 показывают подключение одного из трех приводных двигателей коллиматора.
Другой два соединены одинаково, за исключением контакта номера, с которыми они подключаются к контроллеру Galil. В подключения в Galil описаны в разделе «Сигналы». этого руководства.
Глядя на лист 1 EL-3362, правый край схемы показывает серводвигатель и это кодировщик. В середине рисунка изображения соединительной коробки сценического блока ЭЛ-1238 (внутри пунктирные линии) и разъем для подключения усилителя Galil панель.В левой части рисунка изображен Galil. контроллер и усилитель. Серводвигатель – стандартный Galil. 50-1000 мотор. Он рассчитан на 10,8 унций / А (пиковая 30 унций). крутящий момент, и его энкодер имеет 1000 отсчетов в квадратуре, что контроллер декодирует до 4000 отсчетов на оборот. в корпус исполнительных механизмов коллиматора, энкодер двигателя подключен ко входу вспомогательного энкодера на контроллере Galil. Этот указывает, что на этапе используется двухконтурное кодирование.В проводка соединительной коробки ступеней меняет местами сигналы энкодера двигателя с сигналами датчика линейных перемещений Renishaw, чтобы сервопривод замкнутый контур вокруг энкодера Renishaw (см. также EL-3363).
Приводы коллиматоров уникальны в прибор в том, что они используют оптические прерыватели для HOME сигнальный и первичный FWD и REV ограничения (см. EL-3362, лист 2).Это было вызвано недостаток места в зоне, доступной для установки приводов. Программное обеспечение включает прерыватели концевых выключателей, подтверждение FIDUCIAL ENABLE сигнал, прежде чем любое движение будет разрешено. Эти ограничения могут может быть достигнуто только в том случае, если по какой-либо причине ограничения программного обеспечения не работают.
Если они достигнуты, сигнал поступает в Галил контроллер и контроллер останавливает движение сцены. На этом этапе вы можете выйти за пределы ограничений, но не можете идти в направлении предела.
Вторичные пределы показаны вверху. правая часть страницы. Это переключатели DPDT, которые отключите питание двигателя и сообщите контроллеру, что они были достигнуты. Это окончательные ограничения в системы, и если сцена перемещается достаточно далеко, чтобы споткнуться о них, этап должен быть перемещен за пределы вручную. Другой секции вторичных концевых выключателей подключены параллельно поэтому они только сообщают контроллеру, что сцена достигла ограничение, но не направление.Информация о направлении может быть полученные от первичных концевых выключателей.
Соединительная коробка ступеней EL-1238 подключена для передачи информации о местоположении и мощности двигателя. Сила для двигателя подключен к двум парам витых пар в сценический кабель между соединительной коробкой и Galil панель подключения усилителя. Витые пары AWG Провод 22 калибра. Две пары связаны между собой в клеммы в коробке EL-1238 и провода AWG 18 калибра соединяются к двигателю через контакты 1 и 2 JB2.Заземление подводится к контакт 4 JB2 и контакт 3 возвращает сигнал от вторичные ограничения.
10-контактный плоский ленточный кабель от сервопривода энкодер двигателя подключается непосредственно к буферу энкодера EL-2260 доска (такая же доска используется в DEIMOS и HIRES). К сожалению, чтобы отсоединить этот кабель, крышка должна быть вынул из коробки. Питание этой платы происходит от питание логики смонтировано на монтажной плате контроллера Galil.+ 5В и земля подведены к блоку EL-1238 через контакты 11. и 12. Выход буферной платы энкодера подключен к клеммной колодке внутри соединительной коробки с помощью 10-контактный плоский ленточный кабель.
В случае двойного контура кодированных ступеней, сигналы энкодера двигателя покидают соединить коробку через JB5 и подключить к усилителю Galil панель разъемов через вход вспомогательного энкодера на J27.
Показана схема подключения основных пределов. на листе 2.Все оптические прерыватели – TRW OPB970T55. части. Они расположены так, как показано на схеме выше. Каждый переключатель имеет катод своего входа, подключенного к Питание +5 В через контакт 3 JB3 и через ток 390 Ом ограничивающий резистор. Анод подключен к ПИД . ВКЛЮЧИТЬ сигнал от контакта 2 JB3. Выход секция переключателя подключена к + 5В и массе сигналы от контактов 3 и 5. Выходные сигналы затем подключен следующим образом: FWD предел – контакт 8, HOME – контакт 4 и REV предел – вывод 7.
Вверху по центру листа 1 находятся подключения к источнику питания логики. Все они подключены внутри панели разъемов от контактов на сценическом кабеле разъемы к контактам на большом разъеме J20 с черным и красные провода. Эти провода идут от длинных клеммных колодок на панель Galil. Оттуда перейдите к источнику питания логики. Рядом с разъемами питания логики находится разъем от источника питания Лямбда + 28В.Это сила, которая подается на усилители для работы серводвигателей. На Левая часть чертежа – это блок контроллера. В показаны соединения между контроллером и усилителем сделаны через плоские ленточные кабели.
Электропроводка электродвигателя фокусировки коллиматора № 3 EL-3363
Упрощенная схема кодировщика
На этом чертеже показана проводка для Линейный энкодер Renishaw.
Кодировщик Renishaw используется для замкните сервоконтур ступеней коллиматора. Кодировщик находится на правой стороне листа. Рядом сцена соединительная коробка для этой ступени – это та же коробка, показанная на схеме EL-3362. Кабель кодировщика подключается к коробке через разъем DB15 JB4. Сигналы затем разделяются, чтобы перейти к контроллеру Galil через этап кабель J7 и кабель вспомогательного энкодера через J27.В Сигналы энкодера Renishaw подключаются к энкодеру оси двигателя. входы, чтобы замкнуть серво-контур. Мощность энкодера составляет питание от подключений к питанию логики через контакты J20 19 и 47. Индексный сигнал подключен к вспомогательному энкодеру. вход для этой оси.
TV Filter Wheel Сценическая проводка, EL-3364
Упрощенная схема сцены
На схеме EL-3364 показано подключение Этап ТВ-фильтра.Объясняются связи в Galil. в разделе «Сигналы» данного руководства. Колесо фильтра ТВ пример стадии неограниченного движения. Таким образом, это может двигаться в любом направлении непрерывно.
Глядя на схему, верхний правый Сторона схемы показывает серводвигатель и его энкодер. В середине рисунка изображены Блок коммутации сцены EL-1236 (внутри пунктирных линий) и панель подключения усилителя Galil.Левая сторона на рисунке изображены контроллер и усилитель Galil. В Серводвигатель – стандартный двигатель Galil 50-1000. Он оценен в 10,8 унций / А (пиковое 30 унций) крутящего момента, а его энкодер имеет 1000 отсчетов в квадратуре, которые контроллер декодирует до 4000 отсчетов за оборот. На этом этапе используется одноконтурное кодирование.
так что сервоконтур замыкается вокруг энкодера двигателя.
Как и все остальные ступени, колесо ТВ-фильтра Этап использует оптический прерыватель для создания ДОМАШНЕГО сигнал.Поскольку это неограниченный вращающийся этап, первичные и вторичные ограничения FWD и REV не реализуются. При наведении предметного столика программное обеспечение включает оптический прерыватель, заявив сигнал FIDUCIAL ENABLE на выходе OUT12. После включения реперного знака программа может искать край флага ‘Home’ для обнуления счетчика энкодера буфер. На самом деле процесс немного сложнее, чем это и рассматривается в разделе «Введение».
Соединительная коробка ступеней EL-1236 имеет проводку для передачи информации о местоположении и мощности двигателя. Сила для двигателя подключен к двум парам витых пар в сценический кабель между коммутационной панелью усилителя Galil и соединительная коробка сцены. Витые пары AWG Провод 22 калибра. Две пары связаны между собой на клеммах 1. и 2, и 3 и 4 TB1 в коробке EL-1236. Оттуда AWG Провода 18 калибра подключаются к двигателю через контакты 1 и 2 разъема JB2.
10-контактный плоский ленточный кабель от сервопривода энкодер двигателя подключается непосредственно к буферу энкодера EL-2260 плата, установленная внутри соединительной коробки. (Это та же доска используется в DEIMOS и HIRES). К несчастью, чтобы отсоединить этот кабель, необходимо снять крышку с коробка. Питание этой платы происходит от логического блока. устанавливается на монтажную пластину контроллера Galil. + 5В и линии заземления подведены к блоку EL-1236 через контакты 11 и 12 из JB1.Выход буферной платы энкодера подключен к клеммной колодке внутри соединительной коробки с помощью 10-контактный плоский ленточный кабель. Поскольку это закодированный с одним циклом ступени, сигналы энкодера двигателя покидают соединительную коробку.
через JB1 и подключите к разъему усилителя Galil J8.
Вверху по центру листа 1 находятся подключения к источнику питания логики. Все они подключены внутри панели разъемов от контактов на сценическом кабеле разъемы к контактам на большом разъеме J20 с черным и красные провода.Эти провода идут от длинных клеммных колодок на панель Galil. Оттуда перейдите к источнику питания логики. Рядом с разъемами питания логики находится разъем от источника питания Лямбда + 28В. Это сила, которая подается на усилители для работы серводвигателей. На Левая часть чертежа – это блок контроллера. В показаны соединения между контроллером и усилителем сделаны через плоские ленточные кабели.
Следующая диаграмма иллюстрирует схема, используемая для определения HOME или нулевой точки сцена. В идеале должна быть прикреплена пластина реперного сектора. стадии, соответствующей половине окружность колеса. Поскольку исходное положение определяется как один край пластины реперного сектора, программное обеспечение знает две вещи, когда смотрит на состояние оптический прерыватель: на какие 180 ходов больше, чем у колеса в данный момент и в каком направлении двигаться, чтобы добраться до ДОМА позиция.
Вращающийся столик и реперные точки
Чтобы проиллюстрировать эту концепцию, Предположим, что питание инструмента выключено. Предполагать также, что «домашний» край – это край с правой стороны диаграмму. Когда управляющий компьютер выдает команду на главная сцена, программное обеспечение в контроллере Galil позволяет эмиттерная секция оптического прерывателя. Если сектор пластина или лезвие находится в прерывателе, программное обеспечение знает, что чтобы вернуться в исходное положение, он должен повернуть сцену против часовой стрелки, чтобы добраться до правильного края.
С другой стороны, если оптический прерыватель не заблокирован программным обеспечением затем знает, как повернуть сцену по часовой стрелке, чтобы добраться до дома позиция.
Сообщение Электропроводка ступени дисперсионной призмы, EL-3366, листы 1 и 2
Упрощенная схема сцены
Лист 1
Столбик призмы рассеяния перемещает призма на световом пути и из него.Нормальная работа на этом этапе нужно просто переместить его между двумя положениями: в и вне светового пути без промежуточных позиций. Это достигается за счет использования ограниченного движения, линейной стадии.
Лист 1 схемы показывает подключение сцены. Глядя на схему, верхняя правая сторона На схеме показан серводвигатель и его энкодер. В в центре рисунка изображен EL-1236. Соединительная коробка сцены (внутри пунктирных линий) и Панель разъемов на усилителе Galil.Левая сторона На рисунке изображены контроллер и усилитель Galil. В Серводвигатель – стандартный двигатель Galil 50-1000. Он оценен в 10,8 унций / А (пиковое 30 унций) крутящего момента, а его энкодер имеет 1000 отсчетов в квадратуре, которые контроллер декодирует до 4000 отсчетов за оборот. На этом этапе используется одноконтурное кодирование. так что сервоконтур замыкается вокруг энкодера двигателя.
В отличие от других этапов, Рассеивание столба Prism Stage использует оптические прерыватели для реализации FWD и REV аппаратные ограничения, а также для генерации сигнала HOME.Поскольку это ограниченный линейный этап, первичный и вторичный Используются концевые выключатели FWD и REV.
При наведении сцены программное обеспечение включает оптический прерыватель, заявив FIDUCIAL ENABLE сигнал на выходе OUT1.
С включенным реперным знаком программное обеспечение может затем найдите край флага “Home”, чтобы обнулить буфер счетчика кодировщика. Процесс на самом деле немного больше участвует в этом и рассматривается во Введении. раздел.
На чертеже прямо под двигателем первичные концевые выключатели. Эти пределы могут быть достигнуты только если по какой-то причине ограничения программного обеспечения выходят из строя. Если они достигнут либо FLSA, концевой выключатель переднего хода, либо RLSA, подводится вход обратного концевого выключателя к контроллеру Galil на землю, и контроллер замедляет движение сцена. На этом этапе вы можете выйти за пределы ограничений, но вы не может идти в направлении предела.
Вторичные пределы отображаются непосредственно на слева от мотора. Это переключатели DPDT, которые, если достигнута, оба прерывают путь тока к двигателю и тянут входной бит Galil IN1 низкий, чтобы сигнализировать контроллеру, что предел был достигнут. Это окончательные ограничения в системы, и если сцена перемещается достаточно далеко, чтобы споткнуться о них, этап должен быть перемещен за пределы вручную. Другой секции вторичных концевых выключателей подключены параллельно поэтому они только сообщают контроллеру, что сцена достигла ограничение, но не направление.Информация о направлении может быть полученные от первичных концевых выключателей.
Соединительная коробка ступеней EL-1236 имеет проводку для передачи информации о положении, состояниях концевых выключателей и мощность двигателя. Электропитание двигателя подключено к двум комплектам витые пары в сценическом кабеле между усилителем Galil коммутационная панель и соединительная коробка сцены. Скрученный пары – провода калибра 22 AWG. Две пары связаны вместе на клеммах 1 и 2, а также 3 и 4 TB1 в коробке EL-1236.Оттуда провода AWG 18 подключаются к двигателю через контакты.
1 и 2 из JB2. Кроме того, вторичный ограничивает сигнал и возврат. проходят через контакты 3 и 4 JB2.
10-контактный ленточный кабель от серводвигателя энкодер подключается непосредственно к аналогичному разъему на EL-2260 буферная плата энкодера, установленная внутри межсоединения коробка. (Эта же доска используется в DEIMOS и HIRES). К сожалению, чтобы отсоединить этот кабель, крышка должна быть вынул из коробки.Питание этой платы происходит от питание логики смонтировано на монтажной плате контроллера Galil. Линии + 5В и заземления подведены к блоку EL-1236 через контакты 11 и 12 JB1. Выход платы буфера кодировщика подключается к клеммной колодке внутри межсоединения коробку с помощью 10-контактного плоского ленточного кабеля. Поскольку это однопетлевой кодированный этап, сигналы энкодера двигателя покидают соединить коробку через JB1 и подключить к усилителю Galil разъем J11.
Вверху по центру листа 1 находятся подключения к источнику питания логики. Все они подключены внутри панели разъемов от контактов на сценическом кабеле разъемы к контактам на большом разъеме J10 с черным и красные провода. Эти провода идут от длинных клеммных колодок на панель Galil. Оттуда они переходят к логической мощности поставлять. Рядом с разъемами питания логики находится подключение от источника питания Лямбда + 28В.Это мощность, которая подается на усилители для работы сервопривода моторы. В левой части рисунка находится контроллер. коробка. Показанные соединения между контроллером и усилители выполнены через плоские ленточные кабели.
Лист 2
Упрощенная схема тормозов
Пост-дисперсионная призма является одним из три ступени, которые используют электромеханический тормоз вала для зафиксируйте сцену в нужном положении в конце движения.
В тормоз применяется, когда питание отключено. Освободить тормоза, программное обеспечение сообщает контроллеру Galil установить бит ввода / вывода 40. Это включает реле ввода / вывода Opto-22 в канале 15 ввода / вывода. релейная стойка №4. Это, в свою очередь, применяет 28 вольт от лямбды. Электродвигатель подает питание на тормоз, отпуская его. На этой точке, сцену можно перемещать. По завершении движения снова применяется тормоз, чтобы зафиксировать сцену в нужном положении.
Калибровка Электропроводка ступени лампы, EL-3368
Упрощенная схема
Ступень калибровочной лампы на самом деле не сцена но комплект ламп, кожухи, оптоволоконные кабели и блоки питания.Как показано выше, из контрольной точки вид, лампы включаются и выключаются путем установки и сброса Биты ввода / вывода. Каждый сигнал ввода / вывода управляет твердотельным реле, которое включает и выключает питание отдельной лампы. в корпус кварцевой лампы, однако, из-за потребляемого тока блока питания имеется твердотельное реле Crydom между Opto-22 и источником питания.
Используемые лампы:
- Photron 814A Медно-аргонный полый катод лампа.
- Ксеноновая лампа Pen-Ray решетчатого типа.
- Лампа решётчатого типа Pen-Ray Mercury-Neon.
- Лампа Pen-Ray Neon (90-0015-01).
- Osram Кварцевая лампа (HLX64610).
Лампы находятся в двух разных корпусах. Медно-аргоновая лампа живет в собственном корпусе, который смонтирован.
внутри шкафчика №3. Жгут оптоволоконных кабелей используется для представления свет к спектрографу.Баланс ламп живёт в то, что называется «Фотонная торпеда», которая устанавливается на верхняя часть шкафчика №3 внутри прибора. Эти лампы также проходят через пучок волокон к прибору.
Медно-аргон
Медно-аргонная лампа выключается и включается. битом ввода / вывода 32. При включении питания четыреста выходное напряжение блока питания подается на цепь управления EL-1262 который установлен в синем футляре сбоку от шкафчика.Эта схема устанавливает и поддерживает ток лампы на требуется 5 миллиампер. Регулируемый токовый выход этого Затем цепь подается на лампу. Чтобы заменить эту лампу шкафчик №3 должен быть открыт, а затем ящик с лампой открывается открутив четыре красных винта с накатанной головкой. Используемая лампа: Photron №814 куб. С заправкой аргоном.
Кварц
Кварцевая лампа питается от сети 15В. питание с резистором 2 Ом последовательно.Когда бит ввода / вывода 35 установлен, переменный ток подается на твердотельное реле Crydom, которое в Turn подает питание на блок питания, и 15V подается на лампа. Как показано на схеме выше, кварцевая лампа живет в “Фотонной торпеде” и заменен удалением 4 винта, которыми держатель крепится к трубке. Лампа использованная это: Osram # HLX64610
Ксенон
Ксеноновая лампа представляет собой решетчатую лампу Pen-Ray. Этот представляет собой трубку, согнутую в решетку, как показано здесь.Обратите внимание, что мы разрезаем кружок в квадрате крепления рефлектора. Это позволяет нам установите за ним лампу HgNe. Его источник питания – Pen-Ray PS-8. Это источник питания для тяжелых условий эксплуатации, рассчитанный на 6000 В переменного тока при 30 мА и расположенный в шкафчик №3. Чтобы заменить эту лампу, обратитесь к разделу обслуживания это руководство.
Меркурий-Неон
Лампа HgNe представляет собой решетчатую лампу Pen-Ray. Этот представляет собой трубку, согнутую в решетку, как показано здесь.Это блок питания это Pen-Ray PS-8. Это источник питания для тяжелых условий эксплуатации, рассчитанный на 6000 В переменного тока при 30 мА и находится в шкафчике №3. Пожалуйста, обратитесь к замене лампы процедуру в разделе технического обслуживания данного руководства перед пытается заменить любую из калибровочных ламп. Заменить эта лампа корпус калибровочной лампы, или Photon Torpedo, придется снимать с инструмента. Осторожно, когда снимая корпус, убедитесь, что установочный винт откручен. прижмите пучок волокон к передней панели и осторожно потяните за него из тарелки.Как только корпус извлечен из прибора снимите три винта, которые удерживают заднюю пластину. Отключить встроенных высоковольтных соединителей и медленно снимите заднюю панель, чтобы выставляем решетку светильников. Они прикреплены к пластине с помощью противостояние. В случае лампы HgNe лампа Xe должна быть сначала удаляется, а затем HgNe может быть удален из противостояние. В то время как запасные лампы, поставляемые с ESI, имеют Разъемы ВН на проводах у любых новых ламп их не будет.Также была отправлена небольшая партия контактов и разъемов. с запчастями.
Неон
Неоновая лампа – это лампа Pen-Ray от УФ Товары. Его источник питания – Pen-Ray PS-1, расположенный в шкафчик №3. См. Процедуру замены лампы в раздел технического обслуживания данного руководства перед попыткой замены любую из калибровочных ламп. Источник питания этой лампы включился одновременно с HgNe.
Корпус калибровочной лампы
Корпус калибровочной лампы круглый трубка, которая удерживает кварцевые, неоновые и решетчатые лампы сзади и оптика и крепежная пластина для жгута оптоволокна спереди.
Примерно в 12 дюймах от каждого конца находится фланец. который используется для соединения гибкой трубки между корпусом и шкафчик №3. Они обеспечивают циркуляцию воздуха для отвода тепла от корпус. Вентилятор охлаждения установлен в электронике. шкафчик на фланце, ближайшем к пучку волокон.Прохладный воздух в шкафчике вставляется в корпус через гибкую трубку а затем возвращается в шкафчик через аналогичную трубку сзади жилья.
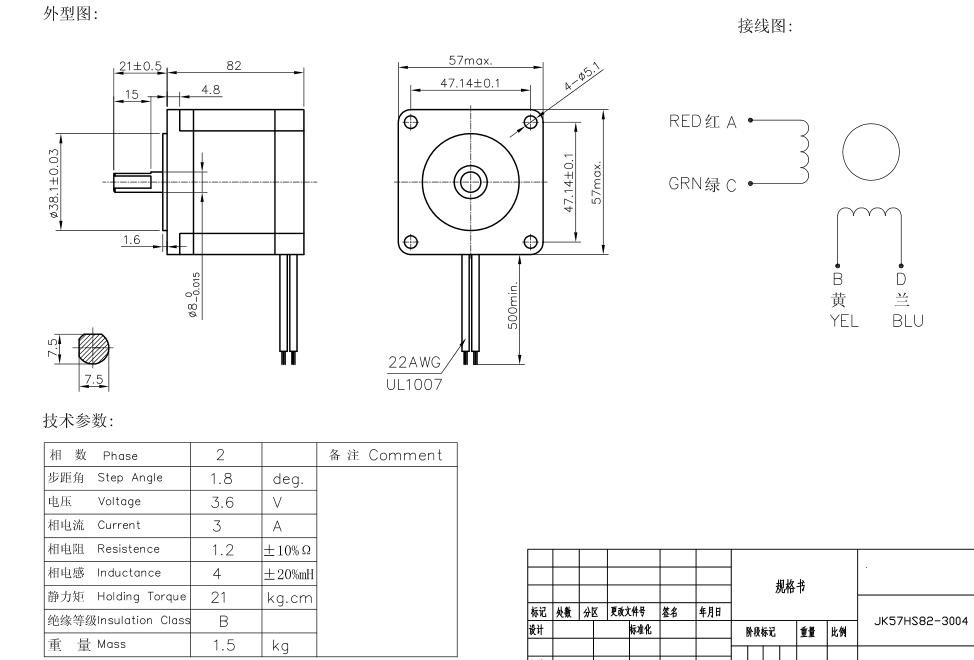
Изображение Flat Электропроводка для зеркала, EL-3370, листы 1 и 2
Упрощенная схема сцены
Лист 1
Столик Image Flat Mirror перемещает плоскость зеркало на световом пути и вне его.Нормальная работа на этом этапе нужно просто переместить его между двумя положениями: в и без промежуточных остановок. Это достигается за счет использования ограниченного движения, линейный этап.
Лист 1 схемы показывает подключение сцены. Глядя на схему, верхняя правая сторона На схеме показан серводвигатель и его энкодер. В в центре рисунка изображен EL-1236. Соединительная коробка сцены (внутри пунктирных линий) и Панель разъемов на усилителе Galil.Левая сторона На рисунке изображены контроллер и усилитель Galil. В Серводвигатель – стандартный двигатель Galil 50-1000. Он оценен в 10,8 унций / А (пиковое 30 унций) крутящего момента, а его энкодер имеет 1000 отсчетов в квадратуре, которые контроллер декодирует до 4000 отсчетов за оборот. На этом этапе используется одноконтурное кодирование. так что сервоконтур замыкается вокруг энкодера двигателя.
Этап Image Flat Mirror использует другой подход к генерации сигнала HOME.
В этом корпуса не хватило места для установки отдельного оптического прерыватель сигнала ДОМАШНИЙ. Вместо этого предел REV переключатель используется для этой цели. То есть то, что обычно концевой выключатель REV теперь обеспечивает как предел REV, так и HOME сигналы. Таким образом, чтобы вернуться на сцену, она запускается в в обратном направлении, пока он не коснется концевого выключателя заднего хода. Результирующий сигнал очищает буфер счетчика кодировщика и сообщает контроллеру, что ступень перешла в обратную сторону предел.Потому что сцена движется зеркалом в переводе в и из позиции не очень критический и гистерезис концевого выключателя не создает проблема. Остальные ограничения, прямая первичная и вторичный вперед и назад, все выполняют ожидаемые функции. То есть, как на схеме ниже, они достигаются в обычном порядке: программное обеспечение, первичное и вторичное.
Непосредственно под двигателем находятся первичные ограничения движения.Эти пределы могут быть достигнуты только в том случае, если для некоторых причина сбоя программных ограничений. Если они будут достигнуты, либо FLSC, концевой выключатель переднего хода или RLSC, обратный концевой выключатель вход переключателя на контроллер Galil заземлен и контроллер замедляет движение сцены. На это точка, вы можете выйти за пределы, но вы не можете войти в направление предела.
Вторичные пределы отображаются непосредственно на слева от мотора.Это переключатели DPDT, которые, если достигнута, оба прерывают путь тока к двигателю и тянут входной бит IN3 Galil – низкий, чтобы сигнализировать контроллеру, что предел был достигнут. Это окончательные ограничения в системы, и если сцена перемещается достаточно далеко, чтобы споткнуться о них, этап должен быть перемещен за пределы вручную. Другой секции вторичных концевых выключателей подключены параллельно поэтому они только сообщают контроллеру, что сцена достигла ограничение, но не направление.
Информация о направлении может быть полученные от первичных концевых выключателей.
Соединительная коробка ступеней EL-1236 имеет проводку для передачи информации о положении, состояниях концевых выключателей и мощность двигателя. Электропитание двигателя подключено к двум комплектам витые пары в сценическом кабеле между усилителем Galil коммутационная панель и соединительная коробка сцены. Скрученный пары – провода калибра 22 AWG. Две пары связаны вместе на клеммах 1 и 2, а также 3 и 4 TB1 в коробке EL-1236.Оттуда провода AWG 18 подключаются к двигателю через контакты. 1 и 2 из JB2. Кроме того, вторичный ограничивает сигнал и возврат. проходят через контакты 3 и 4 JB2.
10-контактный ленточный кабель от серводвигателя энкодер подключается непосредственно к аналогичному разъему на EL-2260 буферная плата энкодера, установленная внутри межсоединения коробка. (Эта же доска используется в DEIMOS и HIRES). К сожалению, чтобы отсоединить этот кабель, крышка должна быть вынул из коробки.Питание этой платы происходит от питание логики смонтировано на монтажной плате контроллера Galil. Линии + 5В и заземления подведены к блоку EL-1236 через контакты 11 и 12 JB1. Выход платы буфера кодировщика подключается к клеммной колодке внутри межсоединения коробку с помощью 10-контактного плоского ленточного кабеля. Поскольку это однопетлевой кодированный этап, сигналы энкодера двигателя покидают соединить коробку через JB1 и подключить к усилителю Galil разъем J13.
Вверху по центру листа 1 находятся подключения к источнику питания логики. Все они подключены внутри панели разъемов от контактов на сценическом кабеле разъемы к контактам на большом разъеме J10 с черным и красные провода. Эти провода идут от длинных клеммных колодок на панель Galil. Оттуда они переходят к логической мощности поставлять. Рядом с разъемами питания логики находится подключение от источника питания Лямбда + 28В.
Это мощность, которая подается на усилители для работы сервопривода моторы. В левой части рисунка находится контроллер. коробка. Показанные соединения между контроллером и усилители выполнены через плоские ленточные кабели.
Лист 2
Упрощенная схема тормозов
Этап Image Flat Mirror – один из трех ступени, которые используют электромеханический тормоз вала для блокировки ступень в положение в конце движения.Тормоз применяется, когда питание отключено. Чтобы отпустить тормоз, программное обеспечение сообщает контроллеру Galil установить бит ввода / вывода 38. Это включает реле ввода / вывода Opto-22 на канале 13 ввода / вывода. релейная стойка №4. Это, в свою очередь, применяет 28 вольт от лямбды. Электродвигатель подает питание на тормоз, отпуская его. На этой точке, сцену можно перемещать. По завершении движения снова применяется тормоз, чтобы зафиксировать сцену в нужном положении.
Низкий Электропроводка для диспергированного плоского зеркала, EL-3372, листы 1 и 2
Лист 1
Упрощенная схема сцены
Движение плоского зеркала с низкой дисперсией плоское зеркало на световом пути и за его пределами.Нормальный операция этого этапа заключается в перемещении его между двумя позиции: вход и выход без промежуточных остановок. Это достигается за счет использования ограниченного движения, линейной стадии.
Лист 1 схемы показывает подключение сцены. Глядя на схему, верхняя правая сторона На схеме показан серводвигатель и его энкодер. В в центре рисунка изображен EL-1236.
Соединительная коробка сцены (внутри пунктирных линий) и Панель разъемов на усилителе Galil.Левая сторона На рисунке изображены контроллер и усилитель Galil. В Серводвигатель – стандартный двигатель Galil 50-1000. Он оценен в 10,8 унций / А (пиковое 30 унций) крутящего момента, а его энкодер имеет 1000 отсчетов в квадратуре, которые контроллер декодирует до 4000 отсчетов за оборот. На этом этапе используется одноконтурное кодирование. так что сервоконтур замыкается вокруг энкодера двигателя.
В столике с плоским зеркалом с низкой дисперсией используется Третий подход к генерации сигнала HOME.В этом случае, не хватило места для установки отдельного оптического прерыватель сигнала ДОМАШНИЙ. Пределы REV и FWD: реализовано с использованием оптических прерывателей. Подобно изображению Flat Stage, сигнал ограничения REV используется для «возврата в исходное положение». сцена. То есть то, что сейчас обычно является сигналом ограничения REV обеспечивает как предел REV, так и сигналы HOME. Таким образом, чтобы «Домой» этап, он движется в обратном направлении, пока не чувствует обратный предел.Результирующий сигнал очищается буфер счетчика кодировщика и сообщает контроллеру, что этап достиг обратного предела. Другие ограничения, вперед первичный и вторичный вперед и назад, все выполнять ожидаемые функции. То есть как на схеме ниже они доступны в обычном порядке: программное обеспечение, первичный и вторичный.
При наведении сцены программное обеспечение включает оптический прерыватель, заявив FIDUCIAL ENABLE сигнал на выходе OUT4.С включенным реперным знаком программное обеспечение может затем найдите край флага ‘Reverse’, чтобы обнулить буфер счетчика кодировщика. Процесс на самом деле немного более вовлечен, чем это, и рассматривается во Введении раздел.
Непосредственно под двигателем находятся первичные ограничения движения.
Эти пределы могут быть достигнуты только в том случае, если для некоторых причина сбоя программных ограничений. Если они будут достигнуты, либо FLSD, концевой выключатель переднего хода, или RLSD, концевой выключатель заднего хода вход переключателя на контроллер Galil заземлен и контроллер замедляет движение сцены.На это точка, вы можете выйти за пределы, но вы не можете войти в направление предела.
Другой раздел вторичных лимитов показаны слева от двигателя. Они DPDT переключатели, при достижении которых оба прерывают текущий путь к двигателя и переводит входной бит Galil IN4 в низкий уровень, чтобы сигнализировать контроллеру, что предел был достигнут. Эти конечные пределы в системе, и если этап продвигается достаточно далеко чтобы сбить их с толку, сцену нужно переместить за предел рука.Вторичные концевые выключатели подключены параллельно, так что они только говорят контроллеру, что этап достиг предела но не направление. Информация о направлении может быть получена от первичных концевых выключателей.
Соединительная коробка ступеней EL-1236 имеет проводку для передачи информации о положении, состояниях концевых выключателей и мощность двигателя. Электропитание двигателя подключено к двум комплектам витые пары в сценическом кабеле между усилителем Galil коммутационная панель и соединительная коробка сцены.Скрученный пары – провода калибра 22 AWG. Две пары связаны вместе на клеммах 1 и 2, а также 3 и 4 TB1 в коробке EL-1236. Оттуда провода AWG 18 подключаются к двигателю через контакты. 1 и 2 из JB2. Кроме того, вторичный ограничивает сигнал и возврат. проходят через контакты 3 и 4 JB2.
10-контактный ленточный кабель от серводвигателя энкодер подключается непосредственно к аналогичному разъему на EL-2260 буферная плата энкодера, установленная внутри межсоединения коробка.(Эта же доска используется в DEIMOS и HIRES).
К сожалению, чтобы отсоединить этот кабель, крышка должна быть вынул из коробки. Питание этой платы происходит от питание логики смонтировано на монтажной плате контроллера Galil. Линии + 5В и заземления подведены к блоку EL-1236 через контакты 11 и 12 JB1. Выход платы буфера кодировщика подключается к клеммной колодке внутри межсоединения коробку с помощью 10-контактного плоского ленточного кабеля.Поскольку это однопетлевой кодированный этап, сигналы энкодера двигателя покидают соединить коробку через JB1 и подключить к усилителю Galil разъем J14.
Вверху по центру листа 1 находятся подключения к источнику питания логики. Все они подключены внутри панели разъемов от контактов на сценическом кабеле разъемы к контактам на большом разъеме J10 с черным и красные провода. Эти провода идут от длинных клеммных колодок на панель Galil.Оттуда они переходят к логической мощности поставлять. Рядом с разъемами питания логики находится подключение от источника питания Лямбда + 28В. Это мощность, которая подается на усилители для работы сервопривода моторы. В левой части рисунка находится контроллер. коробка. Показанные соединения между контроллером и усилители выполнены через плоские ленточные кабели.
Лист 2
Упрощенная схема тормозов
Ступень плоского зеркала с низкой дисперсией трех ступеней, которые используют электромеханический тормоз вала для зафиксируйте сцену в нужном положении в конце движения.В тормоз применяется, когда питание отключено. Освободить тормоза, программное обеспечение сообщает контроллеру Galil установить бит ввода / вывода 39. Это включает реле ввода / вывода Opto-22 в канале 14 ввода / вывода. релейная стойка №4. Это, в свою очередь, применяет 28 вольт от лямбды. Электродвигатель подает питание на тормоз, отпуская его.
На этой точке, сцену можно перемещать. По завершении движения снова применяется тормоз, чтобы зафиксировать сцену в нужном положении.
ПЗС-матрица Электропроводка ограничителя заслонки и электромагнитного клапана, EL-3379
Упрощенная электрическая схема
Затвор CCD представляет собой двухлопастную конструкцию, которая поочередно перемещает одно лезвие, а затем другое в свет путь для блокировки ПЗС.На рисунке выше показано, что там в системе два воздушных поршня и два воздушных соленоида. В прямоугольник в левой части схемы представляет контроллер затвора EL-1183. коробка. Этот блок получает уровень от контроллера ПЗС и генерирует правильные управляющие сигналы для жалюзи. Ссылаться к диаграмме для обсуждения цикла открытия / закрытия. Предполагать что сначала, как на диаграмме 1, заслонка закрыта и что левое лезвие находится в луче.ПЗС Контроллер посылает положительный уровень, чтобы заслонка открылась. открыто. Левое лезвие выходит из луча, как показано на диаграмма 2. Когда экспонирование закончено, ПЗС-контроллер понижает сигнал, и контроллер жалюзи перемещает правое лезвие в балку, как показано на диаграмме 3. Для при следующей экспозиции контроллер CCD снова поднимает затвор сигнал, но на этот раз контроллер заслонки перемещает правое лезвие вне луча, как на схеме 4.В конце экспонирования левое лезвие перемещается обратно в балка, и мы попадаем в нашу начальную конфигурацию, как в диаграммы 1 и 5.
Контроллер приводит в действие соленоид путем подавая на катушку 24 В постоянного тока. Чтобы переместить поршень в другой Направление контроллер меняет полярность на катушку.
Электропитание соленоидов находится внутри коробка контроллера. В контроллере используется запрограммированная вентильная матрица. для генерации логики.Для более подробного обсуждения см. Описание схемы EL-1183 в разделе «Разные рисунки» данного руководства.
Схема ограничения заслонки EL-3379 показывает дополнительная распределительная коробка, которая монтируется на ставне сборка. Он содержит входной разъем, клеммную колодку, и два выходных разъема. Клеммная колодка служит точка прорыва для сигнала и место для проверки сигналы, поступающие от концевых выключателей.Схема также показаны клеммная колодка для соленоидов и разъем для сигналов привода. Клеммная колодка и разъем установлен на задней стороне оптического каркаса. Также, как как указано на схеме, клеммы с восьмого по двенадцатый являются используется для соленоида люка.
Входной люк Сценическая проводка, EL-3380
Упрощенная электрическая схема
Схема входного люка показывает проводка для пределов воздушного поршня и воздушного соленоида.Как схематично видно, что люком управляют два прибора Galil. Биты расширения ввода / вывода контроллера. Бит 27 импульсный, чтобы открыть люк, и долото 28 подает импульс, чтобы закрыть люк. Этот транслируется на второй и третий каналы релейной стойки Opto-22 №4 находится в шкафчике №3. Мы используем Honeywell # 73419AN2NN00M1G011P3. Запорные клапаны 120 В переменного тока. Эти клапаны используют «над центром» механизм, который позволяет нам подавать импульс катушке реле для изменения положение используемого воздушного цилиндра Bimba.
В очевидным преимуществом здесь является то, что как только импульс отправляется на реле защелкивается в соответствующем положении, и катушка осталось обесточенным. Таким образом, тепло вырабатывается только во время 400 микросекундный импульс, который отправляет контроллер.
Подключения к соленоиду показан проходящий через разъем PJ20. Соленоид расположен рядом с соленоидами заслонки и использует ту же клемму полоса TB-SOL для выполнения необходимых соединений.
Под соленоидом с правой стороны на схемах – концевые выключатели ступени вывода. Эти магнитные герконовые переключатели. Они закреплены за воздушный баллон Bimba с ленточным зажимом, который позволяет им ослаблять и перемещать по корпусу цилиндра. Эти регулируются, открывая или закрывая люк, а затем перемещая переключатель в одном направлении, пока сигнал переключателя не упадет из. Отметьте это положение, а затем переместите переключатель в в противоположном направлении, пока он не выпадет.Снова отметьте это положение, а затем переместите переключатель в центр диапазона. Установите люк в другое положение и выполните те же действия. процедура для противоположного переключателя.
Ручное управление Весло. EL-3385
Примечание. Схема ручной лопатки тоже большой, чтобы представить здесь.
Используйте программу просмотра, чтобы изучить схематический.
В комплект входят две ручные лопатки. помогает в обслуживании и устранении неисправностей прибора. В лопасти – это ручные устройства, которые можно прикрепить к нижняя часть инструмента. После подключения их можно использовать для переместите этапы, связанные с веслом.
Каждый из двух лопасти имеют цветовую маркировку и разного пола разъемы для подключения их к системе.Весла сами по себе построены одинаково, но имеют разные таблички с этикетками. Хотя они построены одинаково, некоторые весла делают не устанавливайте некоторые компоненты на лицевую панель. Например, манипулятор для контроллера Galil №1 имеет переключатели и светодиоды для управления стадией вывода. Весло для В контроллере Galil №0 есть переключатели и светодиоды, но они привязаны к корпусу весла и поэтому недоступны на лицевой панели.Запасное весло было отправлено с инструмент. Он имеет новые лицевые панели для каждого из контроллеры. Это позволит технику открыть лопасть. корпус, установите или снимите необходимые переключатели и светодиоды, и добавьте соответствующую лицевую панель. Это также указывает на то, что в в аварийной ситуации, лопатка для контроллера №1 может быть заменяется на контроллер №0, пока пользователь сохраняет прямо, какие функции доступны на этом контроллере. В обратное верно за исключением элементов управления штриховкой.
Схема довольно проста. Каждый из при активации подает заземление на соответствующий входной канал расширения ввода / вывода Galil. Авто / Руководство переключатель в правой части листа выполняет две функции. Во-первых, в ручном режиме он заземляет автоматический / ручной режим. бит через контакт 7 разъема лопасти. Во-вторых, в руководстве положение, он подает +5 вольт на светодиоды. Входящий сигналы приходят из одного из двух мест.Программное обеспечение может тянуть вниз по входам для FWD LIMIT, REV LIMIT или STAGE MOVING Светодиоды в зависимости от входов от различных этапов. Эти Состояния светодиодов зависят от настройки колесика мотора. выключатель. В случае ОТКРЫТЫХ и ЗАКРЫТЫХ ЛЮКОВ Лидс, эти входы подключаются непосредственно к ограничителю воздушного поршня переключатели и дают правильные показания независимо от двигателя установка переключателя.
Обратите внимание, как показано на схеме EL-3386, что они также подключены как входы к контроллеру Galil №1.Ввод / вывод подключения объясняются в следующем разделе (EL-3386).
Ручная лопатка Электропроводка. EL-3386
Лист 1
Упрощенная электрическая схема
На этой схеме показано, как ручная лопатка подключен к контроллеру Galil.Все сигналы к или от Лопасти подключены к твердотельным реле Опто-22. В На диаграмме выше показаны сигналы манипулятора и канал ввода / вывода. что читает Галил. Примечание: если неисправность лопасти подозревается, быстрая проверка светодиодов на реле Opto-22 стойка сообщит вам, присутствует ли сигнал. Просто нажмите кнопку или переместите дисковый переключатель, чтобы увидеть, состояние изменения светодиода индикатора связанного реле. Эти сигналы / светодиоды можно проверить независимо от состояния Автоматический / ручной переключатель.Кроме того, это верно как для ввода, так и для выходные сигналы. Между двумя проводками существует разница. схемы EL-3385 листы 1 и 2. Это дополнительный набор элементы управления на манипуляторе для контроллера Galil №1. Эти кнопки и светодиоды используются для открытия и закрытия входа люк. Потому что ESI не использует никаких других пневматических ступеней. эти органы управления не установлены на лицевой панели лопастей для Контроллер №0.
Лист 2
Упрощенная электрическая схема
Распиновка, характеристики, схема и работа поворотного энкодераНа этой схеме показано, как ручная лопатка подключен к контроллеру Galil.
Все сигналы к или от Лопасти подключены к твердотельным реле Опто-22. В На диаграмме выше показаны сигналы манипулятора и канал ввода / вывода. что читает Галил. Примечание: если неисправность лопасти подозревается, быстрая проверка светодиодов на реле Opto-22 стойка сообщит вам, присутствует ли сигнал. Просто нажмите кнопку или переместите дисковый переключатель, чтобы увидеть, состояние изменения светодиода индикатора связанного реле. Эти сигналы / светодиоды можно проверить независимо от состояния Автоматический / ручной переключатель.Кроме того, это верно как для ввода, так и для выходные сигналы. Между двумя проводками существует разница. схемы EL-3385 листы 1 и 2. Это дополнительный набор элементы управления на манипуляторе для контроллера Galil №1. Эти кнопки и светодиоды используются для открытия и закрытия входа люк. Потому что ESI не использует никаких других пневматических ступеней. эти органы управления не установлены на лицевой панели лопастей для Контроллер №0.
ROTORY ENCODER – это устройство, используемое для определения осевого перемещения и его направления .Хотя они доступны в различных типах, здесь мы собираемся обсудить простой модуль кодировщика контактного типа. Здесь мы собираемся использовать МОДУЛЬ РОТАЦИОННОГО ЭНКОДЕРА M274 .
МОДУЛЬ РОТАЦИОННОГО ЭНКОДЕРА Конфигурация контактов МодульРОТАЦИОННЫЙ ЭНКОДЕР представляет собой пятиконтактное устройство, как показано в распиновке M274 . В них четыре контакта обязательны для использования модуля.
Имя контакта | Описание |
GND | Подключено к ЗЕМЛЕ |
+ | Подключен к + 5В |
SW | Выход внутренней кнопки |
ДТ | Контакт A выход или ДАННЫЕ |
CLK | Контакт B выход или ЧАСЫ |
В вышеуказанных контактах Контакт A или DT и Контакт B или CLK используются для измерения перемещения и направления оси.
- Свободное вращение на 360º.
- 20 шагов или циклов на оборот
- Инкрементальный энкодер
- Может работать при низком напряжении
- Максимальная рабочая температура: от 0 ° C до + 80 ° C
- Простой интерфейс
- Долгая жизнь.
Где используются МОДУЛИ РОТАЦИОННОГО ЭНКОДЕРА M274?
Вот несколько приложений, в которых M274 предпочтительнее других модулей кодировщика
Case1: M274 используется, когда рассматривается стоимость рассрочки.M274 – один из самых дешевых и надежных кодировщиков на рынке. Его легко вложить и заменить.
Case2: С M274 легко работать, учитывая наличие сложных модулей. Для работы с этим модулем нам нужно рассмотреть только два выхода.
Case3: С помощью этого энкодера мы можем измерять осевое перемещение, а также направление изменения.
Также модуль не требует дополнительных компонентов для установки в систему
Как использовать МОДУЛИ РОТАЦИОННОГО ЭНКОДЕРА M274Для понимания работы углового энкодера M274 рассмотрим простую конфигурацию схемы, показанную ниже.
Здесь мы соединили два выхода с двумя светодиодами, чтобы проверить состояние модуля. Кнопка здесь ни к чему, поэтому ее оставили в покое. Модуль питается от источника питания + 5В. Теперь для понимания выходных данных кодировщика давайте рассмотрим внутреннюю стриктуру кодировщика.
Здесь A и B – выходы, и эти контакты оставлены скользящими внутри на вращающемся диске. Этот диск разделен на проводящие (темный сегмент) и непроводящие сегменты (белые сегменты), как показано на рисунке.Токопроводящие контакты или темные сегменты совместно подключаются к + 5В.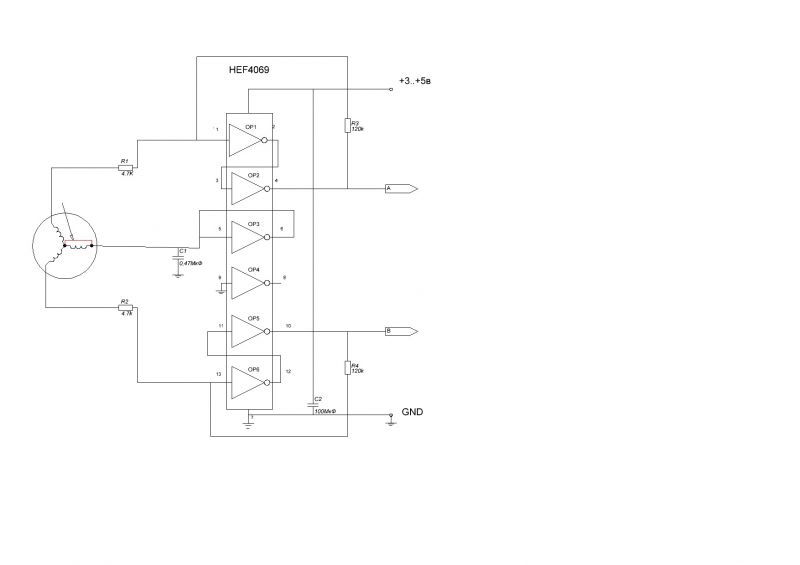 Поэтому, когда точки соприкасаются с темными сегментами, они просто соприкасаются с + 5В.
Поэтому, когда точки соприкасаются с темными сегментами, они просто соприкасаются с + 5В.
Теперь, когда диск вращается по часовой стрелке, точка A сначала соприкасается с проводящим сегментом (темная часть) и обеспечивает выход + 5V. После этого точка B входит в контакт с проводящим сегментом и выдает + 5В. Таким образом, в цепи светодиод D1 загорается первым, следующим за светодиодом D2. Следовательно, когда ось энкодера вращается по часовой стрелке, точка A сначала дает + 5В, а затем B обеспечивает + 5В.
Если ось продолжает вращаться, точка A покидает проводящий сегмент (темная часть) и переходит к непроводящей части (белая часть). Таким образом, выход A становится НИЗКИМ. Затем точка B покидает проводящую часть, делая выход B LOW. При этом D1 выключается, сначала следующий D2 выключается.
Если ось продолжает вращаться, цикл повторяется и выход A становится высоким после выхода B. Таким образом, у нас будет импульсный выход каждый раз, когда точки перемещаются из одного сегмента в другой.
Поскольку эти импульсы определяют изменение оси, мы можем принять их как меру осевого перемещения. Если этот логический сигнал подается на контроллер, он может измерять осевое перемещение по часовой стрелке.
Точно так же, если диск движется против часовой стрелки, точка B входит в контакт с проводящим сегментом, сначала обеспечивая + 5V на выходе B. При продолжении движения диска точка A входит в контакт с темным сегментом. На этом выходе А выдает + 5В. Таким образом, в цепи D2 сначала загорается светодиод, после чего загорается светодиод D1.Выключение также следует той же схеме для завершения цикла. Для каждого цикла на выходе будет импульс напряжения.
Как и раньше, эти сигналы напряжения представляют осевое перемещение. Мы можем принять их за меру осевого перемещения. Если этот логический сигнал подается на контроллер, контроллер может измерять осевое перемещение против часовой стрелки.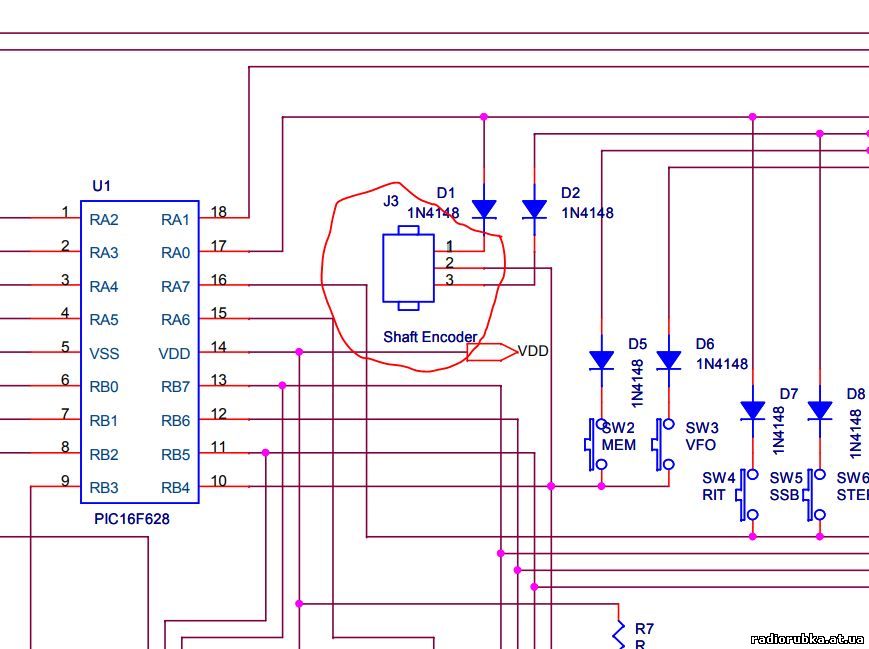
Таким образом, мы можем определить осевое перемещение и направление вращения с помощью энкодера.
Приложения- Системы безопасности.
- Моторы
- Роботизированное оружие
- Торговые автоматы.
- Машины промышленные.
- Инженерные системы.
- Измерительные приборы.
- Хобби-проекты.
- Системы, в которых требуется систематическое изменение ВХОДНОГО устройства, например, CRO, генератор сигналов и т. Д.
Все размеры указаны в миллиметрах.
Схема электрических соединений32 Sew Encoder
Если установлена программа Acrobat Reader версии 7, вы можете просмотреть документ, щелкнув по нему правой кнопкой мыши.Дополнение о принадлежностях Movipro к инструкции по эксплуатации.
Карта абсолютного энкодера Movidrive Mdx61b. Руководства по Dip11b.
Он показывает компоненты схемы в виде упрощенных форм, а также сотрудников и сотрудников по сигналу в середине устройств.
Схема подключения энкодера шитья . Электродвигатели переменного тока dr71 225 315 инструкция по эксплуатации. Электрическая схема двигателя швейного евродвигателя представляет собой упрощенное наглядное изображение электрической схемы.Installationsanleitung инструкции по установке уведомление по установке geber encoder codeur ei7.
При вращении вала энкодера вырабатываются выходные сигналы, пропорциональные углу поворота. Сша u5 v5 w5 l1 l2 l3 u2 v2 w2 t6 t1 t2 t3 t4 t5 u1 v1 w1 t7 t8 t9 u5 v5 w5 мотор. Энкодеры предоставляют системам управления движением информацию о скорости и направлении подсчета позиций.
Motors 23 инкрементальный энкодер в исполнении HTL. Схема подключения энкодера. Обозначение типа энкодеров от seweurodrive состоит из 4 знаков преобразователя и схемы подключения, поставляемой с энкодерами. Сша t12 t13 односкоростной, двойное напряжение, низкое напряжение см. Паспортную табличку двигателя высокое напряжение см. Паспортную табличку двигателя подключение dt79 схема l1 l2 l3 u2 v2 w2 t6 t1 t2 t3 t4 t5 u1 v1 w1 t7 t8 t9 10939p000004 sew eurodrive inc.
Сша t12 t13 односкоростной, двойное напряжение, низкое напряжение см. Паспортную табличку двигателя высокое напряжение см. Паспортную табличку двигателя подключение dt79 схема l1 l2 l3 u2 v2 w2 t6 t1 t2 t3 t4 t5 u1 v1 w1 t7 t8 t9 10939p000004 sew eurodrive inc.
Щелчок левой кнопкой мыши. 6 техническое описание энкодера и сравнение кабеля энкодера dt. Приводы от seweurodrive полностью интегрированы в двигатель.
Редукторы серии r7 f7 k7 s7 spiroplan w руководство по эксплуатации синхронных серводвигателей cm. Это означает, что общая длина привода не изменится.Энкодеры8 встроенные энкодеры 302каталог drn80 315 83встроенные энкодеры встроенные энкодеры ei7.
Motors 2 инкрементальный энкодер с кабелем энкодера в дизайне HTL Сравнение кабелей movidrive mdx 61b dtdv. Сигнал может иметь форму прямоугольной волны для инкрементального энкодера или абсолютной меры положения для абсолютного энкодера.
Советы по подключению двигателя Электропроводка
Sew Eurodrive 13630733 Og 73 S Encoder Es7s Ev7s
Как выбрать Применить и интегрировать правильный кодировщик для
1756 2 9 Использование 1756 Mo2ae с Tr Encoder
1 Movidrive Mves Через Fieldbus
Продукты Sew Eurodrive Ac Motor Dre Drs Drp Drn Series
Электропроводка двигателя Sew Избавьтесь от проблем со схемой подключения
Информационная система Beckhoff на английском языке
Сигналы инкрементального кодировщика Htl Push Pull или Ttl Rs422
Схема набора средств связиCirthon
Датчик серводвигателя Haas Automation Цена Heidenhain
Электромагнитный тормоз двигателя Электромонтажная библиотека Mitsubishi
Sew Eur Схема подключения odrive Схема подключения двигателя швейной машины Sew
Sew Encoder Systems
Схема подключения энкодера Базовые схематические чертежи
Схема подключения двигателя швейной машины Символы и руководство
12 Service Sew Manualzz Com
Sew Encoder Systems Power 9196412000
16742028 Signal Electrical Engineering Optics
Конфигурация энкодера для технологии позиционирования
Аппаратный энкодер в схеме python Adafruit
Системы сшивания энкодеров Старые версии 09196412 Amplitude Power
533700 Настройка Sew As7y Ssi с энкодером 9000 Ssi 755 с использованием энкодера Powerflex4 9000 на шаговом двигателе 9000 As Rotary Encoder
Системное руководство
Sew Encoder Hubner Incremental Encoder Es1c Og 72 Og72 Dn
Sew Encoder Systems
Sew Eurodrive Dubai Stock Sine Encoder Hubner Es1s 1860496
Квадратурные энкодерыThe Ultimate Guide
Movidrive Mdx60b 61b Руководство по эксплуатации 2006 09
Sew Encoder
Sew Encoder
Sew Encoder
Sew Encoder Systems
Sew Encoder
.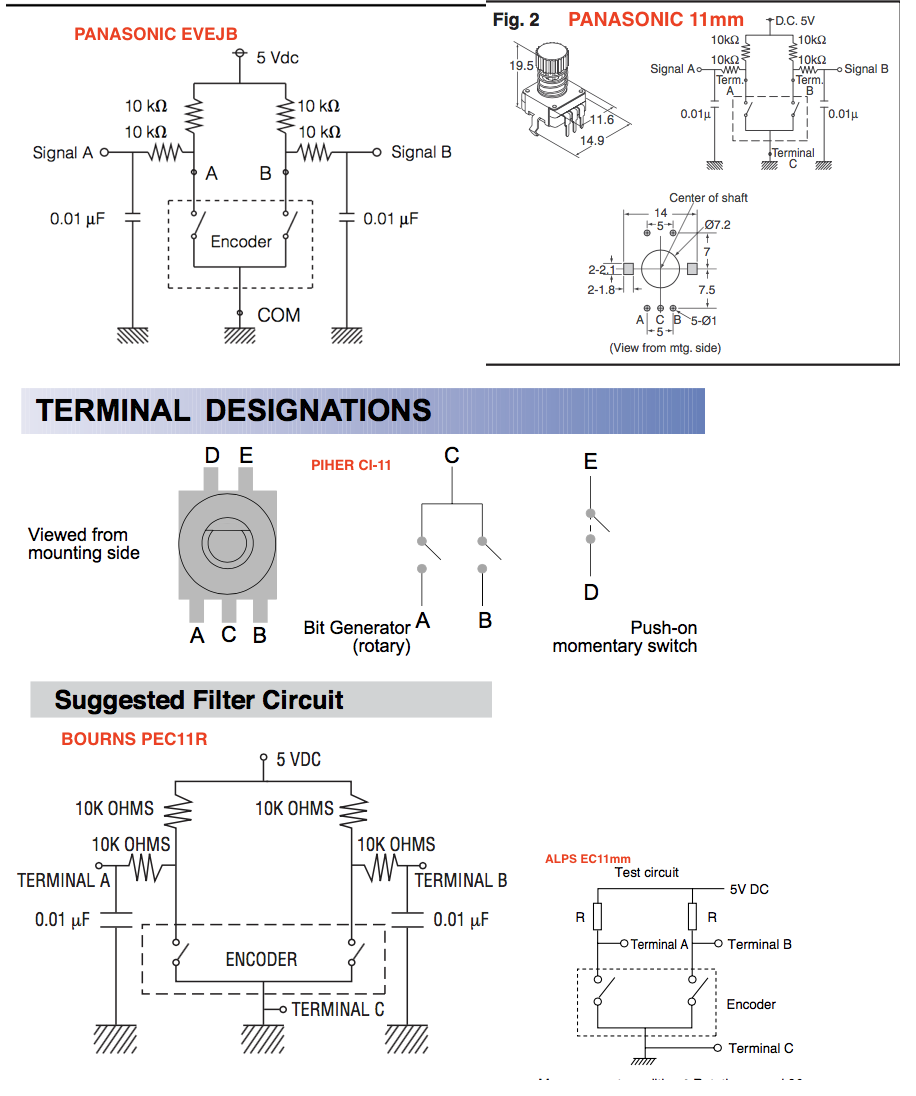
/ *
14CORE – ТЕСТ-КОД
МОДУЛЬ РОТАЦИОННОГО ЭНКОДЕРА
* /
// ************************* ****************************
int RedLed = 2;
int YellowLed = 3;
int GreenLed = 4;
// ********************************************* *******
int aPin = 6;
int bPin = 7;
int buttonPin = 5;
int state = 0;
int longPeriod = 5000; // Время на зеленом или красном
int shortPeriod = 700; // Временной период при изменении
int targetCount = shortPeriod;
int count = 0;
void setup ()
{
pinMode (aPin, INPUT);
pinMode (bPin, INPUT);
pinMode (buttonPin, INPUT);
pinMode (RedLed, ВЫХОД);
pinMode (желтый светодиод, ВЫХОД);
pinMode (GreenLed, ВЫХОД);
}
void loop ()
{
count ++;
if (digitalRead (buttonPin))
{
setLights (HIGH, HIGH, HIGH);
}
else
{
int change = getEncoderTurn ();
int newPeriod = longPeriod + (изменение * 1000);
if (newPeriod> = 1000 && newPeriod <= 10000)
{
longPeriod = newPeriod;
}
if (count> targetCount)
{
setState ();
счетчик = 0;
}
}
задержка (1);
}
int getEncoderTurn ()
{
// Возвращает -1, 0 или +1
static int oldA = LOW;
статический int oldB = LOW;
int результат = 0;
int newA = digitalRead (aPin);
int newB = digitalRead (bPin);
if (newA! = OldA || newB! = OldB)
{
// Что-то изменилось
if (oldA == LOW && newA == HIGH)
{
result = – ( oldB * 2 – 1);
}
}
oldA = newA;
oldB = newB;
возврат результата;
}
int setState ()
{
if (state == 0)
{
setLights (HIGH, LOW, LOW);
targetCount = longPeriod;
состояние = 1;
}
else if (state == 1)
{
setLights (HIGH, HIGH, LOW);
targetCount = shortPeriod;
состояние = 2;
}
else if (state == 2)
{
setLights (LOW, LOW, HIGH);
targetCount = longPeriod;
состояние = 3;
}
else if (state == 3)
{
setLights (LOW, HIGH, LOW);
targetCount = shortPeriod;
состояние = 0;
}
}
void setLights (int красный, int желтый, int зеленый)
{
digitalWrite (RedLed, красный);
digitalWrite (желтый, желтый);
digitalWrite (GreenLed, зеленый);
}
Схема подключения энкодера
DtSheet- Загрузить
Схема подключения энкодера
Открыть как PDF- Похожие страницы
- Обозначение модели
- Обозначение модели
- Обозначение модели
- Пример подключения
- Пример подключения
- 信号 和 功率 继电器 – 包装 规格
dtsheet © 2021 г.