
Как запустить шаговый двигатель без электроники своими руками
У меня много различной оргтехники, которая вышла из строя. Выбрасывать я её не решаюсь, а вдруг пригодится. Из её частей возможно сделать что-нибудь полезное.К примеру: шаговый двигатель, который так распространен, обычно используется самодельщиками как мини генератор для фонарика или ещё чего. Но я практически никогда не видел, чтобы его использовали именно как двигатель для преобразования электрической энергии в механическую. Оно и понятно: для управления шаговым двигателем нужна электроника. Его просто так к напряжению не подключишь.
И как оказалось – я ошибался. Шаговый двигатель от принтера или ещё от какого устройства, довольно просто запустить от переменного тока.
Я взял вот такой двигатель.
Обычно у них четыре вывода, две обмотки. В большинстве случаем, но есть и другие конечно. Я рассмотрю самый ходовой.
Схема шагового двигателя
Его схема обмоток выглядит примерно так:
Очень похоже на схему обычного асинхронного двигателя.
Для запуска понадобится:
- Конденсатор емкостью 470-3300 мкФ.
- Источник переменного тока 12 В.
Замыкаем обмотки последовательно.
Середину проводов скручиваем и запаиваем.
Подключаем конденсатор одним выводом к середине обмоток, а вторым выводом в источнику питания на любой выход. Фактически конденсатор будет параллелен одной из обмоток.
Подаем питание и двигатель начинает крутиться.
Если перекинуть вывод конденсатора с одного выхода питания на другой, то вал двигателя начнет вращаться в другую сторону.
Все предельно просто. А принцип работы этого всего очень прост: конденсатор формирует сдвиг фаз на одной из обмоток, в результате обмотки работают почти попеременно и шаговый двигатель крутится.
Очень жалко то, что обороты двигателя невозможно регулировать. Увеличение или уменьшение питающего напряжения ни к чему не приведет, так как обороты задаются частотой сети.
Хотелось бы добавить, что в данном примере используется конденсатор постоянного тока, что является не совсем правильным вариантом.
 И если вы решитесь использовать такую схему включения, берите конденсатор переменного тока. Его так же можно сделать самому, включив два конденсатора постоянного тока встречно-последовательно.
И если вы решитесь использовать такую схему включения, берите конденсатор переменного тока. Его так же можно сделать самому, включив два конденсатора постоянного тока встречно-последовательно.Сморите видео
Запуск шагового двигателя без электроники
У любого радиолюбителя часто скапливается не мало различной оргтехники, которая вышла из строя. Выбрасывать я её ни кто не решается, так как из ее внутренностей можно сделать что ни будь полезное или выпаять некоторые детали. К примеру: шаговый двигатель, который так распространен, обычно используется любителями самоделок как мини генератор для фонарика или для чего то ещё. Но я практически никогда не видел, чтобы его использовали именно как двигатель для преобразования электрической энергии в механическую. Это и понятно: для управления шаговым двигателем нужна электроника и его просто так к напряжению не подключишь.
Это и понятно: для управления шаговым двигателем нужна электроника и его просто так к напряжению не подключишь.
Но оказывается что данное мнение является ошибочным. Шаговый двигатель от принтера или от другого устрой устройства, можно легко запустить от переменного тока.
Для эксперимента использовался вот такой шаговый двигатель:
Обычно у них четыре вывода и две обмотки, в большинстве случаев, но есть и другие конечно. В данном случае будет рассмотрен самый ходовой двигатель.
Схема шагового двигателя
Схема обмоток данного двигателя выглядит вот так:
Она очень похожа на схему обычного асинхронного двигателя.
Для запуска двигателя понадобится:
- Электролитический конденсатор 470-3300 мкФ.
- Источник переменного тока 12 Вольт.
Замыкаем обмотки последовательно, как на схеме ниже.
Середину проводов нужно скрутить и спаять.
Подключаем конденсатор одним выводом к середине обмоток, а вторым выводом к источнику питания на любой контакт. Фактически электролитический конденсатор будет параллелен одной из обмоток.
Подаем питание и двигатель начинает крутиться.
Если перекинуть вывод конденсатора с одного выхода питания на другой, то вал двигателя начнет вращаться в другую сторону.
Все достаточно просто. Принцип работы этой схемы очень прост: конденсатор формирует сдвиг фаз на одной из обмоток, в результате обмотки работают почти попеременно и шаговый двигатель крутится.
Единственные минус заключается в том, что обороты двигателя невозможно регулировать. Увеличение или уменьшение питающего напряжения ни к чему не приведет, так как обороты задаются частотой сети.
Хотелось бы добавить, что в данном примере используется конденсатор постоянного тока, что является не совсем правильным вариантом. И если вы решитесь использовать такую схему включения, берите конденсатор переменного тока. Его так же можно сделать самому, включив два конденсатора постоянного тока встречно-последовательно.
И если вы решитесь использовать такую схему включения, берите конденсатор переменного тока. Его так же можно сделать самому, включив два конденсатора постоянного тока встречно-последовательно.
Сморите видео
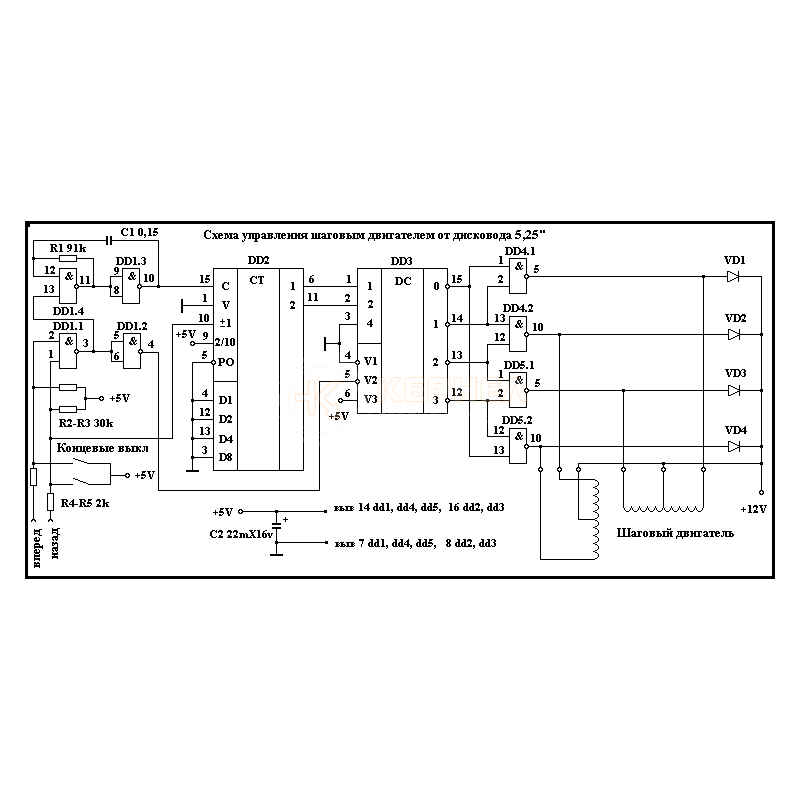
Драйвер для шагового двигателя из принтера
Простой драйвер для шагового двигателя
Порой встает вопрос о том, как бы управлять шаговым двигателем. Как правило, это нужно осуществить, при проектировании какой-нибудь самоделки или более серьезного проекта, например станка с числовым программным управлением. Естественно, такое управление можно купить. Но, драйвер для шагового двигателя из принтера также можно сделать. Это будет самый простой вариант, который наглядно продемонстрирует возможность управлять этим устройством.
Понадобится старый принтер или сканер, можно неработающий. Оттуда, собственно, и будет извлечен шаговый двигатель, если такового нет в наличии. Также из платы потребуется выпаять управляющую микросхему под названием ULN2003. Она может быть и другая, в разной технике стоят различные микросхемы. Подойдут её аналоги: TD62003, отечественная К1109КТ22, более популярная MC1413, L203 и SG2003.
Оттуда, собственно, и будет извлечен шаговый двигатель, если такового нет в наличии. Также из платы потребуется выпаять управляющую микросхему под названием ULN2003. Она может быть и другая, в разной технике стоят различные микросхемы. Подойдут её аналоги: TD62003, отечественная К1109КТ22, более популярная MC1413, L203 и SG2003.
В принципе, подойдут и собратья этих микросхем, такие как ULN2023A, ULN2803 и им подобные. Стоит только смотреть даташиты. Микросхемы можно купить или выпаять из подобной техники. При выпаивании стоит быть осторожными, так как такие электронные компоненты извлекаются сложнее, и есть угроза повреждения их ножек.
Схема подключения
Схема подключения проста.
Потребуется приобрести разъем DB-25, который будет подключаться к порту компьютера, для управления двигателем, в случае, если конструируется ЧПУ станок. Диапазоны входного напряжения указаны для конкретно этой микросхемы. Остальные микросхемы, возможно, потребуют отличного от этого напряжения питания.
В качестве источника питания отлично подойдет компьютерный блок питания. В принципе, подойдет любое зарядное или БП, напряжением от 12В до 24В, с током от 350мА.
Стоит отметить, что желательно обладать технической документацией к модели используемого двигателя, что упростит его подключение к драйверу.
Сам драйвер выглядит так:
В случае если документация не найдена на двигатель, то попробовать найти шины питания требуется в первую очередь. Сделать это можно, как наугад, с возможностью спалить микросхему, так и используя батарейку, к примеру, если двигатель рассчитан на небольшое напряжение.
Если конструкция делается для станка с ЧПУ, то на компьютер потребуется скачать программу Turbo CNC и настроить её под свои нужды.
Простая схема с шаговым двигателем безопасна?
После различных разочарований я наконец понял, как найти эти проклятые провода на шаговых двигателях. Я думал, что управлять биполярными моторами проще, но в конце я предпочитаю однополюсные шаговые двигатели .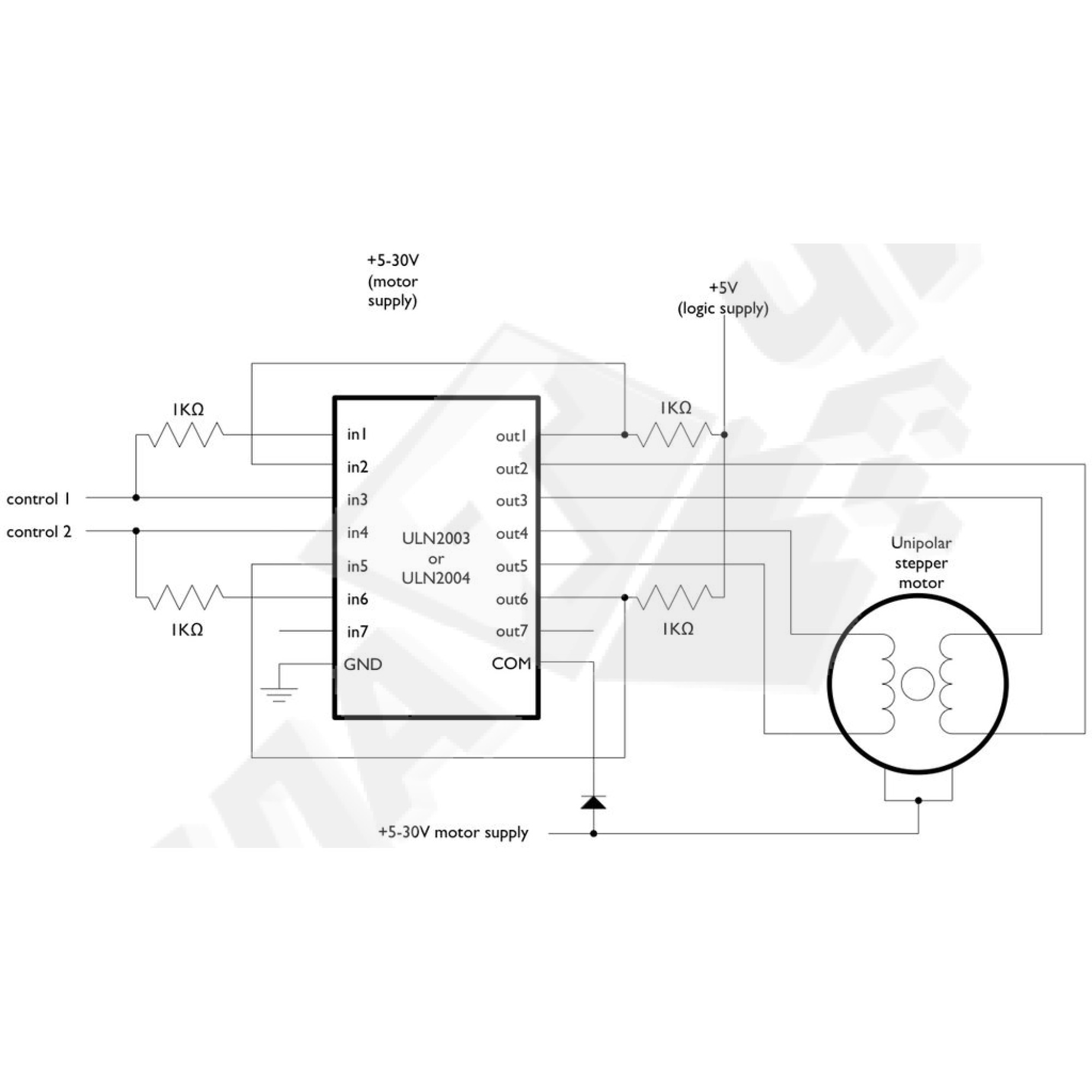 .. больше кабелей, но проще в управлении.
.. больше кабелей, но проще в управлении.
Во всяком случае … после поломки моего единственного L293D я решил попробовать еще раз со знаменитым ULN2803A . С некоторым терпением и низким напряжением (5 В) я следовал приведенному выше описанию видео и записал все последовательности проводов шаговых двигателей, которые я спас.
- OKI EM-199 ( SMA6511 ) от принтера epson
- OKI EM-154 ( STK6711AMK4B ) от принтера epson
- OKI EM-318 ( LB1847 ) от принтера epson
- Mineba PM35L-048-HPI2 от принтера hp
- Mitsumi M55SP-1N от принтера hp
Как вы можете видеть, я нашел только те листы двигателей, которые я не смог найти. Так…
Из того, что я понимаю, Mitsumi M55SP-1N :
- потребляет меньше:
259mA/phase - режим возбуждения используется в библиотеке
2-2 Phase excitation - и я знаю, что могу использовать
12vчтобы управлять им.
Это первый раз, когда я использую шаговый двигатель
Я не хочу разрушать свой микроконтроллер или любую другую часть схемы.
И вот вопрос:
Безопасно ли использовать ULN2803A для управления Mitsumi M55SP-1N при напряжении 12 В от 3,3 В или 5 В?
под этим я подразумеваю:
- У ULN2803A уже много защитных диодов. Достаточно безопасно?
- в спецификации Mitsumi M55SP-1N указано 259 мА / фаза * 4 = 1,1 Ампер .. верно? uln2803 обрабатывает 500 мА на канал и максимум 2,5 А …..
- Энергоснабжение 1,25 Ампер …. достаточно верно?
- Странная вещь случилась .. @ 5v с высокой скоростью, ступающей ULN2803A стал горячим. 50-60 град. С. нормально?
смоделировать эту схему – схема, созданная с использованием CircuitLab
Если все в порядке (безопасно) …. какой конденсатор я должен поставить рядом с Vin шагового двигателя?
И если вы думаете, что мне следует использовать один из вышеперечисленных шаговых драйверов или узнать больше о неизвестных двигателях, я с удовольствием узнаю что-то новое . ..
..
Примечание: Как я уже сказал, я уже проверил все двигатели при низком напряжении и низких оборотах, все они работают при 5 В, используя вышеуказанную схему, кроме конденсаторов. Это на макете .. теперь я хочу спаять это вместе. Я новичок в электронике, и то, что для вас очевидно, это то, чего я даже не знаю.
Брюс Эбботт
- У ULN2803A уже много защитных диодов. Достаточно безопасно?
Да.
- в спецификации Mitsumi M55SP-1N указано 259 мА / фаза * 4 = 1,1 Ампер .. верно?
Да (достаточно близко) Сопротивление каждой фазы составляет 50 Ом + -7%, поэтому при напряжении 12 В оно должно составлять примерно 12/50 = 240 мА на фазу (фактически оно должно быть даже меньше, чем это из-за падения напряжения в транзисторах Дарлингтона).
- Энергоснабжение 1,25 Ампер …. достаточно верно?
Да.
Странная вещь случилась .. @ 5v с высокой скоростью, ступающей ULN2803A стал горячим. 50-60 град. С. нормально?
Прогрев на высокой скорости следует ожидать. Каждый раз, когда катушка выключается, обратный диод пропускает импульс тока, когда магнитное поле в катушке рассеивается. На высокой скорости диоды пропускают столько же тока при выключении катушек, сколько транзисторы при включении, что увеличивает общую потерю мощности. Транзисторы также имеют потери на переключение, которые становятся более значительными при увеличении скорости шага.
Температура корпуса 50-60 ° в порядке. ULN2803 не очень эффективен. При 240 мА каждый транзистор Дарлингтона падает примерно на 1,1 В, что равняется 1,1 Вт общей потери мощности при включении всех 4 фаз. Максимально допустимая температура соединения составляет 125 ° C. Тепловое сопротивление перехода к окружающей среде составляет 73 ° C / Вт (комплект D), поэтому при комнатной температуре (20 ° C) и 1,1 Вт температура перехода должна составлять ~ 100 ° C.
uln2803 обрабатывает 500 мА на канал и максимум 2,5 А ….
Это абсолютные максимальные значения нагрузки, не рекомендуемые для нормальной работы. Для безопасности и надежности вы не должны превышать половину этих значений.
устройство, принцип работы, типы, схемы подключения
Для работы практически всех электрических приборов, необходимы специальные приводные механизмы. Предлагаем рассмотреть, что такое шаговый двигатель, его конструкцию, принцип работы и схемы подключения.
Что такое шаговый двигатель?
Шаговый двигатель представляет собой электрическую машину, предназначенную для преобразования электрической энергии сети в механическую энергию. Конструктивно состоит из обмоток статора и магнитомягкого или магнитотвердого ротора. Отличительной особенностью шагового двигателя является дискретное вращение, при котором заданному числу импульсов соответствует определенное число совершаемых шагов. Наибольшее применение такие устройства получили в станках с ЧПУ, робототехнике, устройствах хранения и считывания информации.
В отличии от других типов машин шаговый двигатель совершает вращение не непрерывно, а шагами, от чего и происходит название устройства. Каждый такой шаг составляет лишь часть от его полного оборота. Количество необходимых шагов для полного вращения вала будет отличаться, в зависимости от схемы соединения, марки двигателя и способа управления.
Преимущества и недостатки шагового электродвигателя
К преимуществам эксплуатации шагового двигателя можно отнести:
- В шаговых электродвигателях угол поворота соответствует числу поданных электрических сигналов, при этом, после остановки вращения сохраняется полный момент и фиксация;
- Точное позиционирование – обеспечивает 3 – 5% от установленного шага, которая не накапливается от шага к шагу;
- Обеспечивает высокую скорость старта, реверса, остановки;
- Отличается высокой надежностью за счет отсутствия трущихся компонентов для токосъема, в отличии от коллекторных двигателей;
- Для позиционирования шаговому двигателю не требуется обратной связи;
- Может выдавать низкие обороты для непосредственно подведенной нагрузки без каких-либо редукторов;
- Сравнительно меньшая стоимость относительно тех же сервоприводов;
- Обеспечивается широкий диапазон управления скоростью оборотов вала за счет изменения частоты электрических импульсов.

К недостаткам применения шагового двигателя относятся:
- Может возникать резонансный эффект и проскальзывание шагового агрегата;
- Существует вероятность утраты контроля из-за отсутствия обратной связи;
- Количество расходуемой электроэнергии не зависит от наличия или отсутствия нагрузки;
- Сложности управления из-за особенности схемы
Устройство и принцип работы
Рис. 1. Принцип действия шагового двигателяНа рисунке 1 изображены 4 обмотки, которые относятся к статору двигателя, а их расположение устроено так, что они находятся под углом 90º относительно друг друга. Из чего следует, что такая машина характеризуется размером шага в 90º.
В момент подачи напряжения U1 в первую обмотку происходит перемещение ротора на те же 90º. В случае поочередной подачи напряжения U2, U3, U4 в соответствующие обмотки, вал продолжит вращение до завершения полного круга. После чего цикл повторяется снова. Для изменения направления вращения достаточно изменить очередность подачи импульсов в соответствующие обмотки.
Типы шаговых двигателей
Для обеспечения различных параметров работы важна как величина шага, на который будет смещаться вал, так и момент, прилагаемый для перемещения. Вариации данных параметров достигаются за счет конструкции самого ротора, способа подключения и конструкции обмоток.
По конструкции ротора
Вращаемый элемент обеспечивает магнитное взаимодействие с электромагнитным полем статора. Поэтому его конструкция и технические особенности напрямую определяют режим работы и параметры вращения шагового агрегата. Чтобы на практике определить тип шагового мотора, при обесточенной сети необходимо провернуть вал, если ощущаете сопротивление, то это свидетельствует о наличии магнита, в противном случае, это конструкция без магнитного сопротивления.
Реактивный
Реактивный шаговый двигатель не оснащается магнитом на роторе, а выполняется из магнитомягких сплавов, как правило, его набирают из пластин для уменьшения потерь на индукцию. Конструкция в поперечном разрезе напоминает шестерню с зубцами.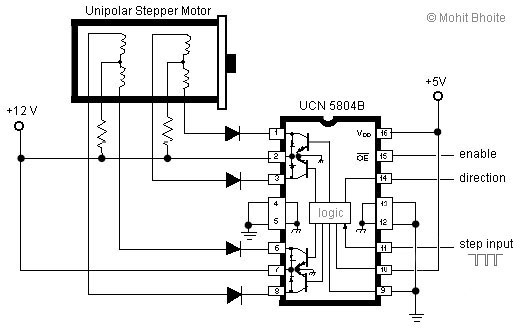 Полюса статорных обмоток запитываются противоположными парами и создают магнитную силу для перемещения ротора, который двигается от попеременного протекания электрического тока в обмоточных парах.
Полюса статорных обмоток запитываются противоположными парами и создают магнитную силу для перемещения ротора, который двигается от попеременного протекания электрического тока в обмоточных парах.
Весомым плюсом такой конструкции шагового привода является отсутствие стопорящего момента, образуемого полем по отношению к арматуре. По факту это тот же синхронный двигатель, в котором поворот ротора идет в соответствии с полем статора. Недостатком является снижение величины вращающего момента. Шаг для реактивного двигателя колеблется от 5 до 15°.
С постоянными магнитами
В этом случае подвижный элемент шагового двигателя собирается из постоянного магнита, в котором может быть два и большее количеством полюсов. Вращение ротора обеспечивается притяжением или отталкиванием магнитных полюсов электрическим полем при подаче напряжения в соответствующие обмотки. Для этой конструкции угловой шаг составляет 45-90°.
С постоянным магнитомГибридные
Был разработан с целью объединения лучших качеств двух предыдущих моделей, за счет чего агрегат обладает меньшим углом и шагом.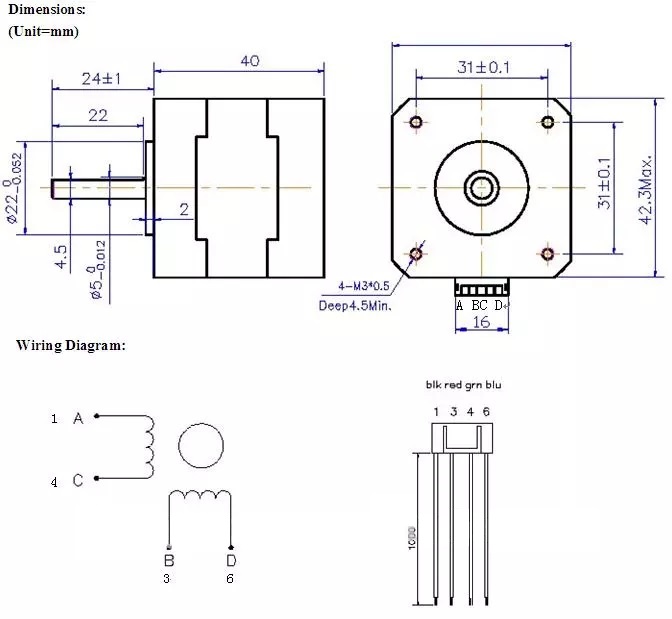
Преимущества гибридного шагового двигателя заключатся в его высокой точности, плавности и скорости перемещения, малым шагом – от 0,9 до 5°. Их применяют для высококлассных станков ЧПУ, компьютерных и офисных приборах и современной робототехнике. Единственным недостатком считается относительно высокая стоимость.
Для примера разберем вариант гибридных ШД на 200 шагов позиционирования вала. Соответственно каждый из цилиндров будет иметь по 50 зубцов, один из них является положительным полюсом, второй отрицательным. При этом каждый положительный зубец расположен напротив паза в отрицательном цилиндре и наоборот. Конструктивно это выглядит так:
Из-за чего на валу шагового двигателя получается 100 перемежающихся полюсов с отличной полярностью. Статор также имеет зубцы, как показано на рисунке 6 ниже, кроме промежутков между его компонентами.
Статор также имеет зубцы, как показано на рисунке 6 ниже, кроме промежутков между его компонентами.
За счет такой конструкции можно достичь смещения того же южного полюса относительно статора в 50 различных позиций. За счет отличия положения в полупозиции между северным и южным полюсом достигается возможность перемещения в 100 позициях, а смещение фаз на четверть деления предоставляет возможность увеличить количество шагов за счет последовательного возбуждения еще вдвое, то есть до 200 шагов углового вала за 1 оборот.
Обратите внимание на рисунок 6, принцип работы такого шагового двигателя заключается в том, что при попарной подаче тока в противоположные обмотки происходит подтягивание разноименных полюсов ротора, расположенных за зубьями статора и отталкивание одноименных, идущих перед ними по ходу вращения.
По виду обмоток
На практике шаговый двигатель представляет собой многофазный мотор. Плавность работы в котором напрямую зависит от количества обмоток – чем их больше, тем плавне происходит вращение, но и выше стоимость. При этом крутящий момент от числа фаз не увеличивается, хотя для нормальной работы их минимальное число на статоре электродвигателя должно составлять хотя бы две. Количество фаз не определяет числа обмоток, так двухфазный шаговый двигатель может иметь четыре и более обмотки.
При этом крутящий момент от числа фаз не увеличивается, хотя для нормальной работы их минимальное число на статоре электродвигателя должно составлять хотя бы две. Количество фаз не определяет числа обмоток, так двухфазный шаговый двигатель может иметь четыре и более обмотки.
Униполярный
Униполярный шаговый двигатель отличается тем, что в схеме подключения обмотки имеется ответвление от средней точки. Благодаря чему легко меняются магнитные полюса. Недостатком такой конструкции является использование только одной половины доступных витков, из-за чего достигается меньший вращающий момент. Поэтому они отличаются большими габаритами.
Униполярный ШДДля использования всей мощности катушки средний вывод оставляют не подключенным. Рассмотрите конструкции униполярных агрегатов, они могут содержать 5 и 6 выводов. Их количество будет зависеть от того, выводится срединный провод отдельно от каждой обмотки двигателя или они соединяются вместе.
Схема а) с различными, б) с одним выводомБиполярный
Биполярный шаговый двигатель подключается к контроллеру через 4 вывода. При этом обмотки могут соединяться внутри как последовательно, так и параллельно. Рассмотрите пример его работы на рисунке.
При этом обмотки могут соединяться внутри как последовательно, так и параллельно. Рассмотрите пример его работы на рисунке.
В конструктивной схеме такого двигателя вы видите с одной обмоткой возбуждения в каждой фазе. Из-за этого смена направления тока требует использовать в электронной схеме специальные драйверы (электронные чипы, предназначенные для управления). Добиться подобного эффекта можно при помощи включения Н-моста. В сравнении с предыдущим, биполярное устройство обеспечивает тот же момент при гораздо меньших габаритах.
Подключение шагового двигателя
Чтобы запитать обмотки, потребуется устройство способное выдать управляющий импульс или серию импульсов в определенной последовательности. В качестве таких блоков выступают полупроводниковые приборы для подключения шагового двигателя, микропроцессорные драйвера. В которых имеется набор выходных клемм, каждая из них определяет способ питания и режим работы.
В зависимости от схемы подключения должны применяться те или другие выводы шагового агрегата.
При различных вариантах подведения тех или иных клемм к выходному сигналу постоянного тока получается определенная скорость вращения, шаг или микрошаг линейного перемещения в плоскости. Так как для одних задач нужна низкая частота, а для других высокая, один и тот же двигатель может задавать параметр за счет драйвера.
Типичные схемы подключения ШД
В зависимости того, какое количество выводов представлено на конкретном шаговом двигателе: 4, 6 или 8 выводов, будет отличаться и возможность использования той или иной схемы их подключения Посмотрите на рисунки, здесь показаны типичные варианты подключения шагового механизма:
Схемы подключения различных типов шаговых двигателейПри условии запитки основных полюсов шаговой машины от одного и того же драйвера, по данным схемам можно отметить следующие отличительные особенности работы:
- Выводы однозначно подводятся к соответствующим клеммам устройства. При последовательном соединении обмоток увеличивает индуктивность обмоток, но понижает ток.

- Обеспечивает паспортное значение электрических характеристик. При параллельной схеме увеличивается ток и снижается индуктивность.
- При подключении по одной фазе на обмотку снижется момент на низких оборотах и уменьшает величину токов.
- При подключении осуществляет все электрические и динамические характеристики согласно паспорта, номинальный токи. Значительно упрощается схема управления.
- Выдает куда больший момент и применяется для больших частот вращения;
- Как и предыдущая предназначена для увеличения момента, но применяется для низких частот вращения.
Управление шаговым двигателем
Выполнение операций шаговым агрегатом может осуществляться несколькими методами. Каждый из которых отличается способом подачи сигналов на пары полюсов. Всего выделяют тир метода активации обмоток.
Волновой – в таком режиме происходит возбуждение только одной обмотке, к которой и притягиваются роторные полюса. При этом шаговый двигатель не способен вытягивать большую нагрузки, так как выдает лишь половину момента.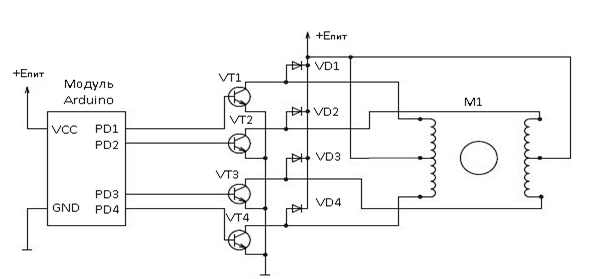
Полношаговый — в таком режиме происходит одновременная коммутация фаз, то есть, возбуждаются сразу обе. Из-за чего обеспечивается максимальный момент, в случае параллельного соединения или последовательного включения обмоток будет создаваться максимальное напряжение или ток.
Полношаговое управлениеПолушаговый – представляет собой комбинацию двух предыдущих методов коммутации обмоток. Во время реализации которого в шаговом двигателе происходит поочередная подача напряжения сначала в одну катушку, а затем сразу в две. Благодаря чему обеспечивается лучшая фиксация на максимальных скоростях и большее количество шагов.
Полушаговое управлениеДля более мягкого управления и преодоления инерции ротора используется микрошаговое управление, когда синусоида сигнала осуществляется микроступенчатыми импульсами. За счет чего силы взаимодействия магнитных цепей в шаговом двигателе получают более плавное изменение и, как следствие, перемещение ротора между полюсами. Позволяет в значительной степени снизить рывки шагового двигателя.
Позволяет в значительной степени снизить рывки шагового двигателя.
Без контроллера
Для управления бесколлекторными двигателями применяется система Н-моста. Который позволяет переключать полярность для реверса шагового двигателя. Может выполняться на транзисторах или микросхемах, которые создают логическую цепочку для перемещения ключей.
Схема Н-мостаКак видите, от источника питания V напряжение подается на мост. При попарном включении контактов S1 – S4 или S3 – S2 будет происходить движение тока через обмотки двигателя. Что и обусловит вращение в ту или иную сторону.
С контроллером
Устройство контроллера позволяет осуществлять управление шаговым двигателем в различных режимах. В основе контроллера лежит электронный блок, формирующий группы сигналов и их последовательность, посылаемых на катушки статора. Для предотвращения возможности его повреждения в случае короткого замыкания или другой аварийной ситуации на самом двигателе каждый вывод защищается диодом, который не пропусти импульс в обратную сторону.
Популярные схемы управления ШД
Схема управления от контроллера с дифференциальным выходомЯвляется одним из наиболее помехозащищенных способов работы. При этом прямой и инверсный сигнал напрямую подключается к соответствующим полюсам. В такой схемы должно применяться экранирование сигнального проводника. Прекрасно подходит для нагрузки с низкой мощностью.
Схема управления от контроллера с выходом типа «открытый коллектор»В данной схеме происходит объединение положительных вводов контроллера, которые подключаются к положительному полюсу. В случае питания выше 9В требуется включение в схему специального резистора для ограничения тока. Позволяет задавать необходимое количество шагов со строго установленной скоростью, определить ускорение и т.д.
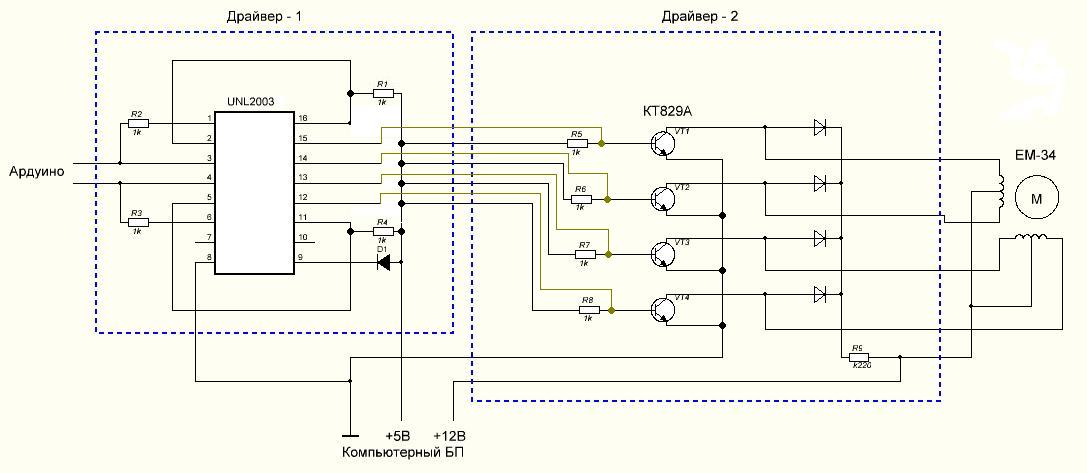
Простейший драйвер шагового двигателя своими руками
Чтобы собрать схему драйвера в домашних условиях могут пригодиться некоторые элементы от старых принтеров, компьютеров и другой техники. Вам понадобятся транзисторы, диоды, резисторы (R) и микросхема (RG).
Вам понадобятся транзисторы, диоды, резисторы (R) и микросхема (RG).
Для построения программы руководствуйтесь следующим принципом: при подаче на один из выводов D логической единицы (остальные сигнализируют ноль) происходит открытие транзистора и сигнал проходит к катушке двигателя. Таким образом, выполняется один шаг.
На основе схемы составляется печатная плата, которую можно попытаться изготовить самостоятельно или сделать под заказ. После чего на плате впаиваются соответствующие детали. Устройство способно управлять шаговым устройством от домашнего компьютера за счет подключения к обычному USB порту.
Полезное видео
Шаговые двигатели от принтера применение в самоделках. Как работает шаговый электродвигатель? Подключение шагового двигателя
С каждым годом люди ведут поиски альтернативных источников. Самодельная электростанция из старого автомобильного генератора будет кстати в отдалённых участках, где нет подключения к общей сети. Она сможет свободно заряжать аккумуляторные батареи, а также обеспечит работу нескольких бытовых приборов и освещения. Куда использовать энергию, что будет вырабатываться решаете вы, а также собрать его своими руками или приобрести у производителей, которых на рынке предостаточно. В этой статье мы поможем вам разобраться со схемой сборки ветрогенератора своими руками из тех материалов которые всегда есть у любого хозяина.
Рассмотрим принцип работы ветро-электростанции. Под быстрым ветровым потоком активируется ротор и винты, после в движение приходит основной вал, вращающий редуктор, а потом происходит генерация. На выходе мы получаем электричество. Следовательно, чем выше скорость вращения механизма, тем больше производительности. Соответственно, при расположении конструкций учитывайте местность, рельеф, знать участки территорий, где большая скорость вихря.
Для этого вам потребуется заранее приготовить всё комплектующие. Самым важным элементом является генератор. Лучше всего брать тракторный или автобусный, он способен выработать намного больше энергии. Но если такой возможности нет, то вероятнее стоит обойтись и более слабыми агрегатами. Для сборки аппарата вам понадобится:
вольтметр
реле аккумуляторной зарядки
сталь для изготовления лопастей
12 вольтовый аккумулятор
коробка для проводов
4 болта с гайками и шайбами
хомуты для крепления
Сборка устройства для дома на 220в
Когда все потребное готово переходите к сборке.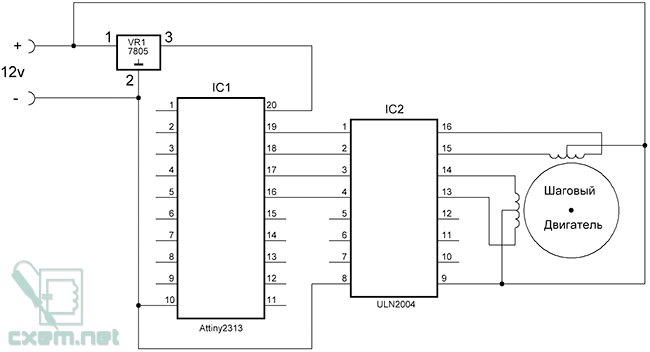 Каждый из вариантов может иметь дополнительные детали, но они чётко оговариваются непосредственно в руководстве.
Каждый из вариантов может иметь дополнительные детали, но они чётко оговариваются непосредственно в руководстве.
Первым делом соберите ветряное колесо – главный элемент конструкции, ведь именно эта деталь будет преображать энергию ветра в механическую. Лучше всего, чтобы у него было 4 лопасти. Запомните, что чем меньше их количество, тем больше механической вибрации и тем сложней будет его сбалансировать. Делают их из листовой стали или железной бочки. Форму они должны носить не такую, как вы видели в старых мельницах, а напоминающие крыльчатый тип. У них аэродинамическое сопротивление намного ниже, а эффективность выше. После того как вы с помощью болгарки, вырежете ветряк с лопастями диаметром 1.2-1.8 метра, его вместе с ротором требуется прикрепить с осью генератора, просверлив отверстия и соединив болтами.
Сборка электрической схемы
Закрепляем провода и подключаем их непосредственно к аккумулятору и преобразователю напряжения. Требуется использовать все, что в школе на уроках физики вас учили мастерить при сборке электрической схемы. Перед началом разработки подумайте, какие кВт вам нужны. Важно отметить, что без последующей переделки и перемотки статора вовсе не пригодны, рабочие обороты составляют 1,2 тыс-6 тыс. об/м, а этого недостаточно для производства энергии. Именно по этой причине требуется избавится от катушки возбуждения. Чтобы поднять уровень напряжения, перемотайте статор тонким проводом. Как правило, в результате мощность будет при 10 м/с 150-300 ватт. После сборки ротор хорошо будет магнитить, будто к нему подключили питание.
Перед началом разработки подумайте, какие кВт вам нужны. Важно отметить, что без последующей переделки и перемотки статора вовсе не пригодны, рабочие обороты составляют 1,2 тыс-6 тыс. об/м, а этого недостаточно для производства энергии. Именно по этой причине требуется избавится от катушки возбуждения. Чтобы поднять уровень напряжения, перемотайте статор тонким проводом. Как правило, в результате мощность будет при 10 м/с 150-300 ватт. После сборки ротор хорошо будет магнитить, будто к нему подключили питание.
Роторные самодельные ветрогенераторы очень надёжны в работе и экономично выгодны, единственным их несовершенством является страх сильных порывов ветра. Принцип работы имеет простой – вихрь через лопасти заставляет механизм крутиться. В процессе этих интенсивных вращений вырабатывается энергия, необходимого вам напряжения. Такая электростанция – это очень удачный способ обеспечить электричеством небольшой дом, конечно, чтобы выкачивать воду из скважины его мощности будет недостаточно, но посмотреть телевизор или включить свет во всех помещениях с его помощью возможно.
Сам вентилятор может быть в нерабочем состоянии, но из него требуется всего несколько деталей – это стойка и сам винт. Для конструкции понадобиться небольшой шаговый двигатель спаянный диодным мостиком для того, чтобы он выдавал постоянное напряжение, бутылочка от шампуня, пластиковая водопроводная трубка длиной примерно 50 см, заглушка для неё и крышка от пластикового ведра.
На станке делают втулку и фиксируют в разъёме от крыльев разобранного вентилятора. В эту втулку будет крепиться генератор. После закрепления, нужно заняться изготовлением корпуса. Срезают с помощью станка или в ручном режиме дно от бутылки шампуня. Во время отрезания, требуется также оставить отверстие на 10, чтобы в него вставить ось, выточенную из алюминиевого прута. Прикрепляют её с помощью болта и гайки к бутылочке. После того как была выполнена припайка всех проводов, в корпусе бутылочки проделывают ещё одно отверстие для вывода этих самых проводов. Протягиваем их и закрепляем в бутылочке сверху на генераторе. По форме они должны совпадать и корпус бутылки должен надёжно скрывать все его части.
Протягиваем их и закрепляем в бутылочке сверху на генераторе. По форме они должны совпадать и корпус бутылки должен надёжно скрывать все его части.
Хвостовик для нашего устройства
Чтобы в будущем он улавливал потоки ветра с разных сторон, соберите хвостовик, использовав заранее подготовленную трубку. Хвостовая часть будет крепиться с помощью откручиваемой крышки от шампуня. В ней тоже делают отверстие и, предварительно надев на один конец трубки заглушку, протягивают её и закрепляют к основному корпусу бутылочки. С другой стороны, трубку пропиливают ножовкой и вырезают ножницами из крышки пластикового ведра крыло хвостовика, оно должно иметь круглую форму. Все что вам нужно, это попросту обрезать края ведра, которыми оно прикреплялось к основной ёмкости.
На заднюю панель подставки прикрепляем USB выход и складываем все полученные детали в одну. Крепить радио или подзаряжать телефон можно будет через этот вмонтированный USB порт. Конечно, сильной мощностью он от бытового вентилятора не обладает, но все же освещение одной лампочки может обеспечить.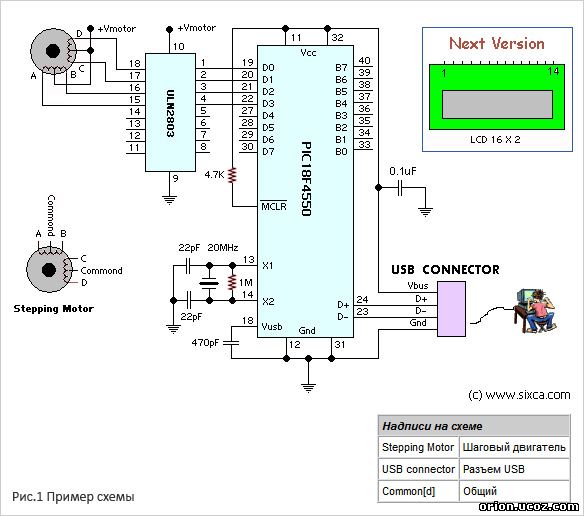
Устройство из шагового двигателя даже при небольшой скорости вращения вырабатывает около 3 Вт. Напряжение может подниматься выше 12 В, а это позволяет заряжать небольшой аккумулятор. В качестве генератора можно вставить шаговый двигатель от принтера. В таком режиме у шагового двигателя вырабатывается переменный ток, а его без труда преобразовать в постоянный, используя несколько диодных мостов и конденсаторы. Схему вы можете собрать собственноручно. Стабилизатор устанавливают за мостами, в следствии получим постоянное выходное напряжение. Чтобы контролировать зрительно напряжение, можно установить светодиод. С целью уменьшения потери 220 В, для его выпрямления, применяются диоды Шоттки.
Лопасти будут из трубы ПВХ. Заготовку рисуют на трубе, а затем вырезают отрезным диском. Размах винта должен составлять около 50 см, а ширина – 10 см. Нужно выточить втулку с фланцем под размер вала ШД. Она насаживается на вал двигателя и крепится с помощью винтов, непосредственно к фланцам будут крепиться пластиковые “винты”. Также проведите балансировку – от концов крыльев отрезаются кусочки пластика, угол наклона изменить посредством нагрева и изгиба. В само устройство вставляют кусок трубы, к которому его тоже прикрепляют болтами. Что касается электрической платы, то её лучше разместить внизу, а к ней вывести питание. С шагового двигателя выходят до 6 проводов, которые соответствуют двум катушкам. Для них потребуются токосъёмные кольца для передачи электроэнергии от подвижной части. Соединив все детали между собой переходим к тестированию конструкции, которая будет начинать обороты при 1 м/с.
Ветряк из мотор-колесо и магнитов
Не каждый знает, что ветрогенератор из мотор-колеса можно собрать своими руками за короткое время, главное заранее запастись нужными материалами. Для него лучше всего подходит ротор Савониуса, его можно приобрести готовый или же самостоятельно. Он состоит из двух полуцилиндрических лопастей и перекрытия, из которых и получаются оси вращения ротора. Материал для их изделия выбирайте самостоятельно: дерево, стеклоткань или пвх-трубу, что является самым простым и оптимальным вариантом. Изготовляем место соединения деталей, на котором нужно проделать отверстия для крепления в соответствии с количеством лопастей. Потребуется стальной поворотный механизм, чтобы устройство могло выдерживать любую погоду.
Изготовляем место соединения деталей, на котором нужно проделать отверстия для крепления в соответствии с количеством лопастей. Потребуется стальной поворотный механизм, чтобы устройство могло выдерживать любую погоду.
Из ферритовых магнитов
Ветрогенератор на магнитах будет сложно освоить малоопытным мастерам, но все же можно попробовать. Итак, должны быть четыре полюса, в каждом будет находиться по два ферритовых магнита. Покрывать их будут накладки из металла толщиной чуть меньше миллиметра для распределения более равномерного потока. Основных катушек должно быть 6 штук, перемотаны толстым проводом и должны находиться через каждый магнит, занимая пространство, соответствующее длине поля. Крепление схем обмотки может быть на ступице от болгарки, в середину которой установлен заранее выточенный болт.
Регулируется поток подачи энергии высотой закрепления статора над ротором, чем он выше, тем меньше залипаний, соответственно мощность понижается. Для ветряка нужно сварить опору-стойку, а на диске статора закрепить 4 больших лопасти, которые вы можете вырезать из старой металлической бочки или крышки от пластикового ведра. При средней скорости вращения выдаёт примерно до 20 ватт.
При средней скорости вращения выдаёт примерно до 20 ватт.
Конструкция ветряка на неодимовых магнитах
Если вы хотите узнать о создании, нужно сделать основой ступицу автомобиля с дисками тормоза, такой выбор вполне оправдан, ведь она мощная, надёжная и хорошо сбалансированная. После того как вы отчистите ступицу от краски и грязи, переходите к расстановке неодимовых магнитов. Их потребуется по 20 штук на диске, размер должен составлять 25х8 миллиметров.
Магниты нужно размещать, учитывая чередование полюсов, перед склейкой лучше создать бумажный шаблон либо прочертить линии, делящие диск на сектора, чтобы не перепутать полюса. Очень важно, чтобы они, стоящие друг напротив друга, были с разными полюсами, то есть притягивались. Клеят их супер-клеем. Поднимите бордюрчики по краям дисков, и в центре намотайте скотч или залепите пластилином для недопущения растекания. Чтобы изделие работало с максимальной отдачей, катушки статора следует рассчитать правильно. Увеличение количества полюсов приводит к росту частоты тока в катушках, благодаря этому, устройство даже при низкой частоте оборота даёт большую мощность. Намотка катушек осуществляется более толстыми проводами, с целью снижения сопротивления в них.
Намотка катушек осуществляется более толстыми проводами, с целью снижения сопротивления в них.
Когда основная часть готова, изготовляют лопасти, как в предыдущем случае и закрепляют их к мачте, что может быть изготовлена из обыкновенной пластиковой трубы с диаметром- 160 мм. В конце концов наш генератор, работающий на принципе магнитной левитации, с диаметром в полтора метра и шестью крыльями, в 8м/с, способен обеспечить до 300 Вт.
Цена разочарования или дорогой флюгер
Сегодня существует множество вариантов как сделать устройство для преобразования энергии ветра, каждый способ по-своему эффективен. Если вы ознакомлены с методикой изготовления оборудования вырабатывающего энергию, то будет неважно на базе чего его делать, главное, чтобы он отвечал задуманной схеме, и на выходе давал хорошую мощность.
У меня много различной оргтехники, которая вышла из строя. Выбрасывать я её не решаюсь, а вдруг пригодится. Из её частей возможно сделать что-нибудь полезное.
К примеру: шаговый двигатель, который так распространен, обычно используется самодельщиками как мини генератор для фонарика или ещё чего. Но я практически никогда не видел, чтобы его использовали именно как двигатель для преобразования электрической энергии в механическую. Оно и понятно: для управления шаговым двигателем нужна электроника. Его просто так к напряжению не подключишь.
Но я практически никогда не видел, чтобы его использовали именно как двигатель для преобразования электрической энергии в механическую. Оно и понятно: для управления шаговым двигателем нужна электроника. Его просто так к напряжению не подключишь.
И как оказалось – я ошибался. Шаговый двигатель от принтера или ещё от какого устройства, довольно просто запустить от переменного тока.
Я взял вот такой двигатель.
Обычно у них четыре вывода, две обмотки. В большинстве случаем, но есть и другие конечно. Я рассмотрю самый ходовой.
Схема шагового двигателя
Его схема обмоток выглядит примерно так:Очень похоже на схему обычного асинхронного двигателя.
Для запуска понадобится:
- Конденсатор емкостью 470-3300 мкФ.
- Источник переменного тока 12 В.
Середину проводов скручиваем и запаиваем.
Подключаем конденсатор одним выводом к середине обмоток, а вторым выводом в источнику питания на любой выход.
 Фактически конденсатор будет параллелен одной из обмоток.
Фактически конденсатор будет параллелен одной из обмоток.Подаем питание и двигатель начинает крутиться.
Если перекинуть вывод конденсатора с одного выхода питания на другой, то вал двигателя начнет вращаться в другую сторону.
Все предельно просто. А принцип работы этого всего очень прост: конденсатор формирует сдвиг фаз на одной из обмоток, в результате обмотки работают почти попеременно и шаговый двигатель крутится.
Очень жалко то, что обороты двигателя невозможно регулировать. Увеличение или уменьшение питающего напряжения ни к чему не приведет, так как обороты задаются частотой сети.
Хотелось бы добавить, что в данном примере используется конденсатор постоянного тока, что является не совсем правильным вариантом. И если вы решитесь использовать такую схему включения, берите конденсатор переменного тока. Его так же можно сделать самому, включив два конденсатора постоянного тока встречно-последовательно.
Сморите видео
Вы, хоть понимаете, что пишете? Или пишете для того, чтобы человека поддержать в его начинаниях и он, потратив деньги на комплектующие для своей системы, в конечном итоге получил абсолютно неработоспособную вещь? Вы отвечаете: “Двигатель, как генер подойдет” – да, подойдет, но откуда вы взяли 1,1-1,5А? Это при каком напряжении? При какой скорости вращения ротора? Далее пишете: “Стандарт мощности 1м ленты, вроде, 5Вт. ..” – стандарта мощности тут нет, а ленты бывают и около 5Вт и около 14Вт, и около 7Вт на метр и др., а это очень большой разброс. Продолжаем: “Так как вы столько накрутили то вполне может хватить для заряда аккумулятора” – это, вообще, что означает? То, что чем сложнее, навороченнее и запутаннее схема, тем больше ее отдача и эффективность? Полная ерунда. Для зарядки 12В мотоаккума нужно около 14-15В при токе примерно 0,6-0,7А (для емкости примерно 7А/ч). Вы уверены, что система способна долговременно выдавать такие параметры? Ведь, чтобы зарядить разряженный аккум мотоцикла, 2-3-х часов не хватит. Считаете, также, что заряжать можно и от 18В? Да, можно, но электролит выкипит через неделю, если не раньше, и пластины посыпятся. Хороша рекомендация! Неприхотливы в зарядке – это не означает, что их можно заряжать любым напряжением. Далее Вы пишете: “Будет очень даже отлично, ведь вдруг забыл выключить свет и аккумулятор сел еще до того как успеет подзарядится” – говорите так, будто зарядка аккума происходит только в светлое время суток))) Это ветряк, а не солнечная батарея.
..” – стандарта мощности тут нет, а ленты бывают и около 5Вт и около 14Вт, и около 7Вт на метр и др., а это очень большой разброс. Продолжаем: “Так как вы столько накрутили то вполне может хватить для заряда аккумулятора” – это, вообще, что означает? То, что чем сложнее, навороченнее и запутаннее схема, тем больше ее отдача и эффективность? Полная ерунда. Для зарядки 12В мотоаккума нужно около 14-15В при токе примерно 0,6-0,7А (для емкости примерно 7А/ч). Вы уверены, что система способна долговременно выдавать такие параметры? Ведь, чтобы зарядить разряженный аккум мотоцикла, 2-3-х часов не хватит. Считаете, также, что заряжать можно и от 18В? Да, можно, но электролит выкипит через неделю, если не раньше, и пластины посыпятся. Хороша рекомендация! Неприхотливы в зарядке – это не означает, что их можно заряжать любым напряжением. Далее Вы пишете: “Будет очень даже отлично, ведь вдруг забыл выключить свет и аккумулятор сел еще до того как успеет подзарядится” – говорите так, будто зарядка аккума происходит только в светлое время суток))) Это ветряк, а не солнечная батарея. При правильно работающей системе, при постоянном ветре, аккум вообще не должен разряжаться, если даже забыли выключить свет. Но идея фотоэлемента сама по себе хороша с точки зрения автоматизации. Далее: светодиодная лента, наверное, будет работать, как Вы говорите, и при 30 вольтах, однако, долго ли? Сопротивления ограничивают ток, да, но он же будет расти пропорционально повышению напряжения, а не оставаться постоянным! Диоды очень не любят превышения рабочего тока. Так, что результат известен: перегрев диодов и, как следствие, резкое снижение срока эксплуатации, либо выход их из строя крайне быстрый. Следом пишете: “Емкость также не критична, добавьте еще 1 пленочный конденсатор на 1 мкф” – для чего? Это что, фильтр помех? Почему тогда 1мкФ? И зачем там вообще фильтр? А, если не фильтр, а сглаживающий пульсации элемент, то тут как раз его емкость критична! Емкость – это основной параметр конденсатора вообще-то. А 1мкФ – это пустое место для описанной человеком системы, ничего он не сгладит.
При правильно работающей системе, при постоянном ветре, аккум вообще не должен разряжаться, если даже забыли выключить свет. Но идея фотоэлемента сама по себе хороша с точки зрения автоматизации. Далее: светодиодная лента, наверное, будет работать, как Вы говорите, и при 30 вольтах, однако, долго ли? Сопротивления ограничивают ток, да, но он же будет расти пропорционально повышению напряжения, а не оставаться постоянным! Диоды очень не любят превышения рабочего тока. Так, что результат известен: перегрев диодов и, как следствие, резкое снижение срока эксплуатации, либо выход их из строя крайне быстрый. Следом пишете: “Емкость также не критична, добавьте еще 1 пленочный конденсатор на 1 мкф” – для чего? Это что, фильтр помех? Почему тогда 1мкФ? И зачем там вообще фильтр? А, если не фильтр, а сглаживающий пульсации элемент, то тут как раз его емкость критична! Емкость – это основной параметр конденсатора вообще-то. А 1мкФ – это пустое место для описанной человеком системы, ничего он не сгладит. Даже 1000мкФ, которую хотел установить автор вопросов – очень мало для его задумки. Я бы понял, если бы это было 5000-7000 или даже 10000мкФ, а то и больше. В конце человек спрашивает, хватит ли мотоаккума, чтобы лента светилась всю ночь, и Вы отвечаете, что, мол, конечно, хватит. Вы изучали физику в школе? Или еще изучаете? Это было Ваше предположение пальцем в небо или хоть какой-нибудь элементарный расчет? Давайте прикинем очень грубо: человек писал, что хочет установить 10-15м ленты. Даже, если взять минимальные значения, т.е. 10м ленты мощностью 5Вт/м, то путем нехитрых подсчетов получаем 50Вт мощности. Поделив мощность ленты на напряжение аккума (примерно 12,8В) получим ток: 50/12,8=3,9А. Емкость обычного мотоаккума примерно равна 7А/ч. Т.о. можно прикинуть, сколько времени проработает лента от полностью заряженного аккума: 7/3,9=1,79ч=1ч 47мин., т.е. почти два часа. Это далеко не вся ночь. К тому же, в расчет взяты минимальные параметры и, если длина ленты или/и ее мощность будут больше, соответственно время работы от аккума пропорционально уменьшится.
Даже 1000мкФ, которую хотел установить автор вопросов – очень мало для его задумки. Я бы понял, если бы это было 5000-7000 или даже 10000мкФ, а то и больше. В конце человек спрашивает, хватит ли мотоаккума, чтобы лента светилась всю ночь, и Вы отвечаете, что, мол, конечно, хватит. Вы изучали физику в школе? Или еще изучаете? Это было Ваше предположение пальцем в небо или хоть какой-нибудь элементарный расчет? Давайте прикинем очень грубо: человек писал, что хочет установить 10-15м ленты. Даже, если взять минимальные значения, т.е. 10м ленты мощностью 5Вт/м, то путем нехитрых подсчетов получаем 50Вт мощности. Поделив мощность ленты на напряжение аккума (примерно 12,8В) получим ток: 50/12,8=3,9А. Емкость обычного мотоаккума примерно равна 7А/ч. Т.о. можно прикинуть, сколько времени проработает лента от полностью заряженного аккума: 7/3,9=1,79ч=1ч 47мин., т.е. почти два часа. Это далеко не вся ночь. К тому же, в расчет взяты минимальные параметры и, если длина ленты или/и ее мощность будут больше, соответственно время работы от аккума пропорционально уменьшится.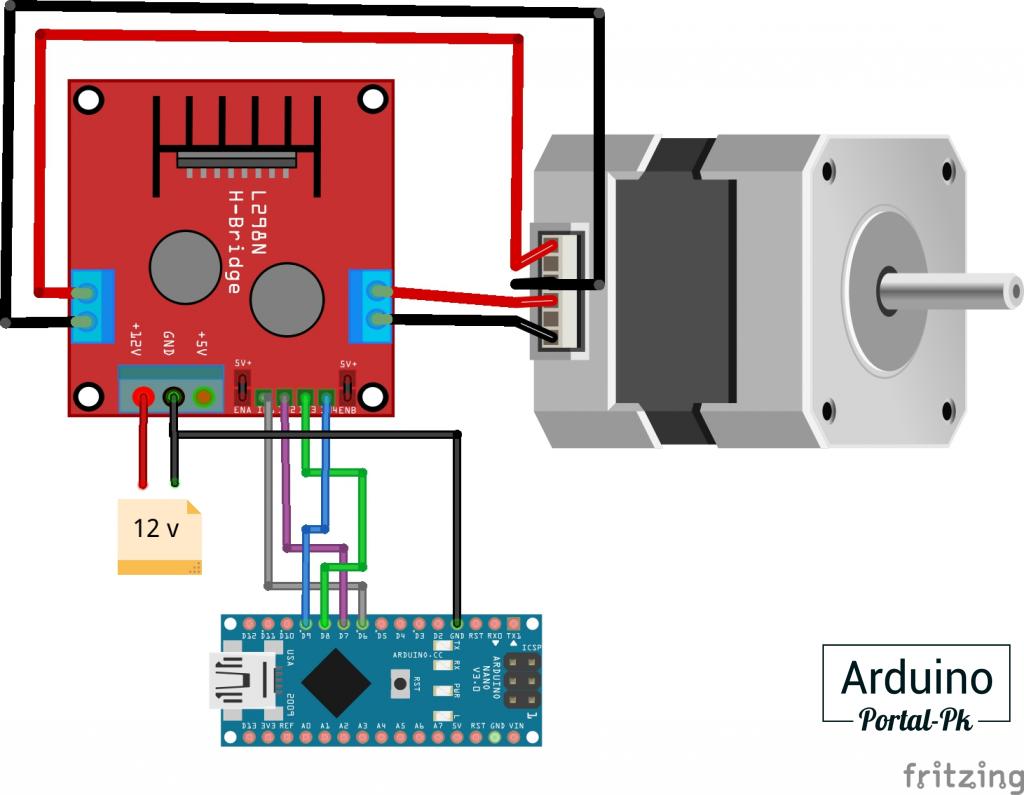 Вот, как-то так.
Вот, как-то так.
Я бы не стал всего этого писать, но дело в том, что лента стоит денег, аккум и фотореле тоже… И деньги это немалые, а чел, получивший одобрение и поддержку своей идеи в комментах людей, не понимающих сути и нюансов процесса, радостно побежит в магаз, потратит деньги на комплектующие, а в итоге получит систему, неработоспособную в принципе, изначально. Не надо давать советы, не разбираясь в вопросе!
Обычно дует лёгенький ветерок но мой мини ветрячёк периодически раскручивается до очень больших оборотов, винт вращается с такой скоростью, что его практически не видно, правда при таких оборотах доносится едва слышное рокатание лопастей. Сейчас этот ветрячёк поддерживает в рабочем состоянии старенький, но рабочий аккумулятор, чтобы тот не разряжался. Максимальная мощность ветрячка всего до 100мА, возможно он может выдать и больше, но у нас обычно дует небольшой ветер, и замерял на обычном ветерке.
Конструкцию подобных ветрячков подсмотрел на одном заморском сайте и решил повторить, так и родился этот малыш. В качестве генератора использовал шаговый моторчик от давно нерабочего и пылившегося у меня струйного принтера. Разобрав его выкрутил маторчик. Далее посмотрел, повертел, покрутил руками, померил сколько даёт, давал очень мало, но вольты поднимались выше 12-ти, а значит он теоретически мог заряжать аккумулятор.
В качестве генератора использовал шаговый моторчик от давно нерабочего и пылившегося у меня струйного принтера. Разобрав его выкрутил маторчик. Далее посмотрел, повертел, покрутил руками, померил сколько даёт, давал очень мало, но вольты поднимались выше 12-ти, а значит он теоретически мог заряжать аккумулятор.
Далее из транзистора сделал крепление для лопастей. Транзистор просверлил по диаметру вала на котором стаяла зубчатая насадка, в общем под её размеры. Надел на вал транзистор, капнул клея и покрутил убедившись что всё ровно. Потом окончательно зафиксировал с помощъю эпоксидки. Развёл немного и залил отверстие транзистора, дополнительно защитил моторчик от непогоды замазав дырочки в моторчике. Ниже фотография сего генератора.
Далее из отрезка ПВХ трубы, диаметром 110мм, вырезал лопасти, на трубе нарисовал заготовку, которую вырезал отрезной машинкой. Размеры взял примерные ширина получилась 9см, а размах винта 48см. Просверлил отверстия и прикрутил винт к моторчику-генератору с помощъю маленьких болтиков.
За основу использовал отрезок 55-той ПВХ трубы, далее вырезал хвост из фанерки, и добавил кусочек от 110-той.Моторчик вклеил внутри трубы. После сборки получилась вот такая ветроэлектростанция. Сразу собрал выпрямитель.Так как этот мотор не хотел давать много вольт на малых оборотах, то собрал по схеме удвоения и включил последовательно.
Диоды взял HER307, конденсаторы — 3300мкф
Схему укутал в полиэтилен и вставил в трубу выпрямитель, потом мотор и привязал его проволокой сквозь просверленные дырочки, пространство замазал силиконом. Так-же силиконом потом замазал все дырдочки сверху, а снизу просверлил одно отверстие на всякий случай, чтобы если что вода стекла, и испарялся конденсат.
Хвост закрепил насквозь болтом, полукруглый хвост вставил и привязал проволокой, он и так прочно держится. Нашёл центр тяжести, просверлил (диам. 9мм.) Ещё просверлил диам. 6мм два болта М10, насквозь, под ось. (Болты М10 здесь служат «подшипником» оси) Ввернул сверху и снизу болты М10 в трубу, смазал длинный болт М6 солидолом и всё скрутил, получилось довольно жёстко. Болт-ось (М6) прикрутил к уголку, а его к палке. Сверху на болт М10 одел на силиконе пробку, теперь ось воды не боится. Всё ветрогенератор изготовлен.
Болт-ось (М6) прикрутил к уголку, а его к палке. Сверху на болт М10 одел на силиконе пробку, теперь ось воды не боится. Всё ветрогенератор изготовлен.
Для мачты взял несколько брусочков. которые скрутил саморезами, закрепил ветряк и поднял на ветер. Подключил к аккумулятору, зарядка идёт, но очень слабенькая, поддерживает аккумулятор от естественного разряда. Так как верячок крутиться, то остался доволен, по крайней мере буду знать откуда ветер дует.Этот вариант — как сказано на том сайте — little weekend project, то-есть маленький проект для выходных, для удовольствия что-нить поковырять, тем более я не потратил ни копейки… клей не в счёт. Так по идее может пару маленьких светодиодов зажечь, или мобильный телефон за пару суток зарядить, но скорее всего такой слабый ток телефон примет за плохой контакт и отключит, написав на дисплее плохое соединение.
В будущем если будет время и желание может сделаю на освещение двора, вот только второй такой-же соберу и аккумулятор небольшой поставлю, или несколько аккумуляторных батареек. Для этого остался ещё один шаговый, только этот выдаёт под 2х20вольт от прокручивания рукой, но ток маленький. А второй — на щётках, сразу постоянка. От руки 10 вольт, КЗ — 0,5 Ампера. А ещё всё-же буду мучить автогенератор, вот только магниты дождусь.
Для этого остался ещё один шаговый, только этот выдаёт под 2х20вольт от прокручивания рукой, но ток маленький. А второй — на щётках, сразу постоянка. От руки 10 вольт, КЗ — 0,5 Ампера. А ещё всё-же буду мучить автогенератор, вот только магниты дождусь.
Пришла в голову простая, очевидная, но гениальная мысль. Ведь если учесть, что шаговый двигатель является не только моторчиком, который обеспечивает механическую работу абсолютно разных устройств (начиная от принтеров сканеров и другой офисной аппаратуры, заканчивая различными агрегатами, применяемыми в более серьезных устройствах). Шаговый двигатель так же может послужить отличным генератором электричества!
А его самый главный плюс во всем, это то, что ему вовсе не требуются большие обороты, он вполне может исправно работать и при малых нагрузках. То есть даже при минимальном действии силы направленной на него, шаговый двигатель отлично вырабатывает энергию. Самое главное, что этой энергии вполне хватит на различные нужды, вроде освещения дороги велосипедисту с помощью подключенного к шаговому двигателю фонаря..jpg)
К сожалению с обычным генератором стандартному велосипеду будут все же необходимы начальные обороты, до того как фонарик начнет испускать лучи достаточно яркого света для четкого освещения пути. Но при использовании шагового двигателя этот недостаток удаляется сам собой, то есть освещение будет подаваться сразу как только начнется вращение колеса.
Но правда у этой чудо конструкции все же будет ряд недочетов. Например наиболее явный из них, это большое магнитное залипание. Но на самом деле это не так страшно для велосипедиста.
Что приступая к работе нам будет необходимо найти некоторые детали:
1) Собственно сам шаговый двигатель.
2) парочка конденсаторов большой емкости.
3) светодиодные фонари
4) стабилизатор напряжения 5-6 вольт.
Найти шаговый двигатель довольно просто в силу того, что он весьма распространен во всех офисных приборах. Единственное что нужно понимать, это то, что чем больше шаговый двигатель – тем соответственно лучше для нас.
Тут будет описано и представлено несколько моделей шаговых двигателей и различные варианты их крепления к железному коню.
Для начала возьмем самый большой двигатель, что удалось раздобыть автору. Он демонтировал его из обычного офисного плоттера для печати(по сути это принтер, только в несколько раз большего размера).
Внешне двигатель довольно велик.
Но прежде чем приступить к изучению схемы стабилизации так же схемы питания, стоит обратить внимание на методику крепления этого агрегата к велобайку.
Если взгляните на рисунок, то поймете, что генератор расположен ближе к оси колеса и вращение передается от дополнительного круга.
И все же так как модель велосипеда у каждого своя и кто-то не захочет повреждать раму саморезами, вам будет нужно самому разработать крепление а так же круг вращения, вариантов тут действительно много.
Если же вы не представляете себе как прикрутить большой шаговый двигатель к конструкции, есть вариант поменьше:
Вам остается только выбрать вариант генератора, подходящего под размеры вашего транспортного средства.
Чтож когда с шаговыми двигателями разобрались, можно приступить и к фонарям и цепям питания.
Фонари необходимо взять светодиодные. схема выпрямления будет выглядеть так: блок выпрямительных диодов, несколько конденсаторов большой ёмкости и естественно стабилизатор напряжения. В принципе это стандартная схема питания.
Шаговый двигатель стандартно имеет на выходе четыре проводка, которые соответствуют двум катушкам. именно по этой причине на изображении выпрямительных блока тоже два. Этот самодельный генератор электричества вполне может выдавать аж до 50 вольт напряжения на больших оборотах, так что, конденсаторы лучше взять соответственные(напряжение выше 50). Ну а стабилизатор на напряжение 5-6 вольт.
И так в чем же суть самоделки, и почему она понадобилась?
Все дело в его преимуществе, даже только тронувшись с места- вам путь будет уже ярко освещен фонарем, запитанным от нашего шагового двигателя- он же генератор.
Так же хотелось бы отметить, что в процессе движения фонарь не будет мигать или тухнуть- освещение будет плавным и ровным.
Шилд RAMPS 1.4 подключение к Arduino Mega
Шилд RAMPS 1.4 подключение к Arduino Mega.
Рассмотрим подключение платы Shield-RAMPS-1.4 на примере 3D принтера Mendel90.
RAMPS 1.4 это шилд (надстройка) для Arduino Mega 2560. Ардуино преобразует G-коды в сигналы и управляет 3D принтером посредством силовой части – RAMPS 1.4.
Плата RAMPS 1.4 одевается поверх Arduino и все подключения, кроме USB, осуществляются через неё. Питание 12В на Arduino подаётся через RAMPS 1.4.
Подробнее о товаре «Шилд RAMPS 1.4 плата контроллера для 3D принтера (Shield-RAMPS-1.4)» =>>
Двухэкструдерная схема подключения
Схема подключения с одним экструдером
Обычно используют билинейные (четыре провода) шаговые двигатели на 1,7 А типоразмера Nema 17. Провода желательно свить в косички для защиты от наводок.
Шаговые двигатели для оси Z можно подключать двумя способами:
- Первый способ.
Параллельное подключение пары шаговых двигателей на одну ось Z – это когда штекер каждого шагового двигателя подключается к своему индивидуальному разъему на плате RAMPS 1. 4.
4.
Такой способ подключения шаговых двигателей для оси Z является стандартным подключением к плате RAMPS 1.4.
Следует заметить, что при параллельном (стандартном) подключении могут возникать проблемы с рассинхронизацией шаговых двигателей, если будет иметь место разница в сопротивлении обмоток у подключаемой пары шаговых двигателей. - Второй способ.
Второй способ это подключить шаговые двигатели последовательно одним штекером по схеме показанной ниже.
При таком последовательном подключении двух шаговых двигателей по оси Z проблем с рассогласованием пары движков уже не будет наблюдаться.
Питание на RAMPS 1.4 подаётся от блока питания 12В 30А.
Подключение концевых выключателей
На плате ramps предусмотрено шесть разъемов для подключения концевых выключателей, их порядок следующий: X min, X max, Y min, Y max, Z min, Z max. Подключать концевики нужно соблюдая полярность. Если смотреть на разъемы концевиков со стороны разъемов питания RAMPS, то порядок пинов будет следующий: Signal, GND, +5 В.
Подключение термисторов RAMPS поддерживает три датчика температуры, разъемы для них подписаны – T0, T1, T2. В T0 подключают термистор хотэнда, а в T1 термистор нагревательного стола. Полярность у термисторов отсутствует. T2 служит для термистора второго хотэнда.
На плату могут быть установлены драйверы шаговых двигателей типа A4988 с минимальным микрошагом 1/16 или Drv8825 с минимальным микрошагом 1/32
Прежде чем установить драйвера, необходимо выставить микрошаг драйвера, установив необходимую комбинацию джамперов, на разъеме, который находится под соответствующем драйвером.
Если используется драйвер A4988, то расположение перемычки будет таким:
Если используется драйвер Drv8825, то расположение перемычки будет таким:
Подключение нагревательного стола и нагрева хотэнда
Разъемы для подключения нагревательных элементов обозначены D8, D9, D10. В D8 подключают нагревательный стол, а в D10 подключается нагрев хотэнда. В D9 подключают вентилятор для программной регулировки обдува печатающихся деталей, либо нагрев второго хотэнда (в зависимости от того, что указать в прошивке).
Подключение LCD дисплея
На плате Ramps есть специальный разъем для подключения дисплея, поэтому подключить любой LCD дисплей не составит труда.
Шилд Shield-RAMPS-1.4 – одна из самых распространённых плат для сборки 3D принтеров.
Нажать и посмотреть схему RAMPS 1.4 =>>
Эта “материнская” плата позволит Вам без проблем коммутировать все комплектующие воедино.
Привод шагового двигателя, сохраненный со старого принтера
Мне нужно некоторое линейное движение для нового проекта, и я решил разобрать старый матричный принтер, чтобы повторно использовать его (-ы) шаговый (-ые), управляя ими через драйвер A4988.
Это проект, который я построил с этим двигателем:
Принтер имел маркировку Philips NIMS 1433 PLUS, но после некоторого обсуждения на FB выяснилось, что исходной моделью была Seikosha SP-1900 Plus или 2400.
Пользователь FB G Toscano предоставил картинку ниже и руководство по обслуживанию в разделе приложений.
Как только я снял крышку, возникла такая ситуация:
Есть два шаговых двигателя, один для печатающей головки, чтобы двигаться влево и вправо, на линейном валу, а другой для рулона бумаги.
PowerИз сервис-мануала вроде питается от 24в. Это напряжение, которое я решил взять непосредственно с платы питания принтера, которая разделяет 220 В переменного тока на разные напряжения. Это часть схемы силовой платы:
Отсюда мы можем сделать вывод, какое напряжение должно присутствовать в шести областях силовой платы:
Однако при тестировании с помощью мультиметра выходы 1 и 2 не дали никаких результатов. напряжение, а на выходе 6 – 8.2 Вольта. Я недостаточно хорошо разбираюсь в схемах, чтобы понять, было ли это каким-то образом предназначено в схеме, или если плата сломана, в то время как другие предположили, что это может зависеть от того факта, что на плате питания нет фактической нагрузки.
Позже я решил использовать выход 8,2 В для питания Arduino.
ДвигателиЯ нашел руководство на Instructables, чтобы понять, как идентифицировать провода, подключенные к двум двигателям, которые я нашел в принтере. У двигателей по шесть проводов, но нам нужно использовать только четыре из них.
Чтобы определить разные провода и те, которые мне пришлось использовать, мне пришлось проверить сопротивление между шестью проводами.
Мы знаем, что у двигателя две катушки; каждая катушка подключена к трем проводам. Из этих трех два находятся на концах катушки, а один – в середине. Это означает, что два соединенных на концах провода будут иметь большее сопротивление; это те, которые нам нужно использовать. Заполнив таблицу значениями сопротивления, легко определить, какие из них представляют собой две пары проводов, подключенных на концах двух катушек, и те, которые нам нужно подключить к драйверу A4988.
СхемаПосле тестирования схемы (см. Прилагаемую схему) с Arduino UNO и макетной платой я выбрал Nano. Теперь все умещено на плате 3×7, которая питается от сравнительно огромного оригинального модуля питания принтера (с красивой большой кнопкой ввода / вывода).
Это руководство по Howtomechatronics, а также эта страница POLULU, объясняющая использование A4988, были отправной точкой для моей последней схемы и кода.
Дальнейшие разработкиСхема очень проста.На следующих этапах я хотел бы добавить функцию управления режимом сна, которая позволит мне экономить электроэнергию, уменьшить нагрев и разблокировать двигатель. Различные кнопочные входы могут быть добавлены через аналоговые контакты Nano с соответствующими резисторами, чтобы вручную привести голову в желаемое положение (левое и правое управление), запустить процедуру движения, включить спящий режим и так далее. Обратная связь с пользователем будет осуществляться через светодиоды.
Для этого я бы использовал готовую панель управления принтером, которую вы можете увидеть на следующих рисунках:
В сервисном руководстве мы видим, какой провод разъема идет к какой лампе или кнопке:
Вкл. Кроме того, я, вероятно, попробую прикрепить сервопривод на головку и дополнительный шаговый двигатель (от того же принтера) или двигатель постоянного тока для вращательного движения.
Я добавлю всю документацию, как только проект будет закончен.
ОБНОВЛЕНИЕ / январь 2019: готовый проект задокументирован здесь.
Кривые крутящего момента для шаговых двигателей
Как они созданы и что они означают
При выборе шагового двигателя вы пытаетесь выбрать двигатель, который соответствует вашим требованиям к скорости и крутящему моменту плюс некоторый запас прочности. Но как вы сравниваете характеристики двигателей между поставщиками двигателей. Большинство поставщиков предоставляют кривые характеристики скорость – крутящий момент, чтобы дать представление о том, какие характеристики можно ожидать от двигателя.Кривые скорости шагового двигателя – крутящего момента показывают, какой крутящий момент доступен от шагового двигателя при заданной скорости в сочетании с конкретным драйвером. Это означает, что в зависимости от различных комбинаций двигателей и драйверов от системы шагового двигателя можно ожидать разную производительность. В этой статье описывается, как создается кривая скорость – крутящий момент для шагового двигателя, и на какие важные моменты следует обращать внимание на кривой.
Четко определенная кривая скорость – крутящий момент, например, показанная ниже, должна включать следующую информацию.
1. Потребляемая мощность: Это напряжение, которое подается на драйвер. Для драйверов входного напряжения постоянного тока это же напряжение обычно подается непосредственно на обмотки двигателя. Для драйверов входного напряжения переменного тока напряжение переменного тока выпрямляется до напряжения постоянного тока перед подачей на обмотки двигателя. Например, для драйвера 115 В переменного тока приложенное напряжение к обмоткам двигателя составляет 162 В постоянного тока.
2. Тип драйвера: Указывает, какой тип драйвера использовался для создания кривой.Должен быть показан либо однополярный, либо биполярный драйвер. Тип драйвера также указывает, относится ли он к типу постоянного тока или постоянного напряжения.
3. Использование демпфера: Демпфер, хотя и не требуется, может помочь создать более типичную характеристическую кривую, представляя инерционную нагрузку на двигатель. Кривая должна указывать, использовался ли демпфер и каковы его характеристики.
4. Угол шага: Это угол шага, под которым двигатель работал при создании кривой.Кривые обычно показывают, какой основной угол шага (1,8 °, 0,9 °, 0,72 °, 0,36 °) двигателя или какое разрешение драйвера (полное, половинное, микрошаговое деление) использовалось.
5. Конфигурация обмотки двигателя: Здесь описывается, как двигатель был подключен к приводу и какой ток подавался на обмотки. Соединения двигателя могут быть униполярными, биполярными последовательными, биполярными полукатушками и биполярными параллельными.
6. Единицы крутящего момента: Вертикальная ось показывает величину крутящего момента и в каких единицах (например.г. унция-дюйм, Н-м и т. д.).
7. Скорость: Горизонтальная ось показывает скорость вала двигателя и в каких единицах (например, об / мин, pps, Гц и т. Д.).
8. Максимальная пусковая скорость без нагрузки: Максимальная пусковая скорость без нагрузки – это максимальная скорость, при которой двигатель может запускаться синхронно без нагрузки и без использования ускорения. Обычно это отображается в виде отметки «fs» на горизонтальной оси.
9. Удерживающий момент: Это крутящий момент, который двигатель будет создавать, когда двигатель находится в состоянии покоя и номинальный ток подается на обмотки.
10. Кривая крутящего момента отрыва: Эта кривая представляет максимальный крутящий момент, который шаговый двигатель может передать нагрузке при любой заданной скорости. Любой требуемый крутящий момент или скорость, превышающие (превышающие) эту кривую, вызовут потерю синхронизма двигателем.
11. Кривая крутящего момента при втягивании (без нагрузки): Эта кривая представляет максимальное сочетание крутящего момента и скорости, которое ненагруженный шаговый двигатель может запускать или останавливать без какого-либо ускорения или замедления. Поскольку кривая втягивающего момента для шагового двигателя изменяется в зависимости от инерционной нагрузки, приложенной к двигателю, кривые втягивающего момента не отображаются на кривых скорость – крутящий момент, приведенных в каталогах.Чтобы работать выше кривой крутящего момента втягивания, двигатель должен быть ускорен или замедлен за пределами диапазона поворота.
12. Кривая момента втягивания (инерционная нагрузка): Эта кривая представляет максимальное сочетание крутящего момента и скорости, которое шаговый двигатель с инерционной нагрузкой (т. Е. Демпфер) может подавать на нагрузку и запускать или останавливать без какого-либо ускорения или замедление. Чтобы работать выше кривой крутящего момента втягивания, двигатель должен быть ускорен или замедлен за пределами диапазона поворота.
13. Диапазон самозапуска (область запуска / остановки): Находясь в этой области, шаговый двигатель может запускать, останавливать или изменять направление синхронно с входным импульсом без необходимости ускорения или замедления.
14. Диапазон поворота: В диапазоне поворота обычно работают шаговые двигатели. Шаговый двигатель не может быть запущен непосредственно в диапазоне поворота. После запуска двигателя где-то в диапазоне самозапуска двигатель может быть ускорен или приложена нагрузка в диапазоне поворота.Затем двигатель необходимо замедлить или уменьшить нагрузку до диапазона самозапуска, прежде чем двигатель можно будет остановить.
15. Максимальная частота срабатывания: Это максимальная скорость, с которой двигатель может работать без нагрузки на вал.
Кривые скорость – крутящий момент создаются путем раскрутки шагового двигателя до известной скорости, а затем постепенного приложения крутящего момента к выходному валу с помощью тормоза и измерения с помощью датчика крутящего момента. Нагрузка прикладывается медленно, пока двигатель не потеряет синхронизм (остановится).В тот момент, когда двигатель теряет синхронизм, записывается крутящий момент, приложенный к валу двигателя в тот же момент. Этот процесс повторяется трижды на каждой точке скорости. Среднее из трех значений крутящего момента затем используется в качестве значения, которое будет отображаться на кривой скорость – крутящий момент. Этот процесс повторяется в нескольких точках скорости. Затем точки крутящего момента наносятся на график для различных точек скорости, чтобы создать полную кривую. См. Рисунок ниже.
Как упоминалось ранее, характеристики скорость – крутящий момент определяются комбинацией шагового двигателя и драйвера.Как правило, чем выше напряжение, приложенное к обмоткам двигателя, тем быстрее двигатель вращается. Например, на приведенных ниже кривых кривая скорость – крутящий момент для шагового драйвера CVK245AK / CVK245BK показывает, что на обмотки двигателя подается 24 В постоянного тока, в то время как кривая для шагового драйвера RKS545 была создана с напряжением 162 В постоянного тока, подаваемым на обмотки. Как вы можете видеть, крутящий момент на скорости шагового драйвера RKS545 поддерживается на гораздо более высокой скорости.
Таким образом, кривая скорость-крутящий момент может быть полезным инструментом для выбора правильного шагового двигателя для вашего приложения.
Ник Йохантген
Менеджер по техническим вопросам и обучению в Северной Америке
Oriental Motor USA Corporation
3D-печать шагового двигателя – Электроника
Фотографии Proto GШаговые двигатели – невероятно точный и невероятно полезный инструмент в арсенале любого производителя. Они являются сердцем любого станка с ЧПУ, робота, вытяжного робота или 3D-принтера. Откройте шаговый двигатель, и вы обнаружите плотную, механически красивую массу медных катушек, зубчатых колес и магнитов.Эта сложность делает его тем более удивительным, что инженер Proto G взял на себя задачу 3D-печати и ручного завода собственного шагового двигателя.
Используя Arduino, 3D-принтер, шесть неодимовых магнитов, восемь гвоздей, один подшипник и тонну медного магнитного провода, этот шаговый двигатель не обладает компактным удобством стандартного NEMA, но у него есть сердце и красота сама по себе.
Чтобы помочь вам создать свою собственную версию этого шагового двигателя, Proto G создал Instructable и разместил все свои файлы для 3D-печати и код Arduino в своей учетной записи на Google Диске.Но будьте осторожны, 3D-печать – это простая часть.
Настоящая задача этого проекта – намотать катушки вашего собственного двигателя с помощью магнитной проволоки. Чтобы быстро с этим справиться, в видео демонстрируется метод прикрепления гвоздя к концу электродрели и его использования для медленной намотки проволоки за несколько проходов. Удивительно, как ему это удается. После обертывания провод обматывается лентой, чтобы катушка была плотной.
Между видео и файлами 3D-принтера, кодом Arduino и поездкой в магазин бытовой техники у вас есть почти все, что вам нужно, чтобы запустить собственный шаговый двигатель.Когда вы закончите, двигатель сам по себе может оказаться не самой практичной альтернативой покупке точно изготовленного и откалиброванного двигателя, но он определенно выглядит так, как будто это весело выставлять напоказ. Мне также нравится, что этот проект представляет собой смесь высоких и низких технологий, сочетающую Arduino и 3D-печать с гвоздями, проволокой, лентой и магнитами.
Схема шагового двигателя Proto G.Что такое шаговый двигатель и как он работает
От простого DVD-плеера или принтера в вашем доме до сложного станка с ЧПУ или роботизированного манипулятора – шаговые двигатели можно найти почти повсюду.Его способность выполнять точные движения с электронным управлением позволила этим двигателям найти применение во многих устройствах из семейства кошачьих, таких как камеры наблюдения, жесткие диски, станки с ЧПУ, 3D-принтеры, робототехника, сборочные роботы, лазерные резаки и многое другое. В этой статье мы узнаем, что делает эти моторы особенными, и что за этим стоит теория. Мы узнаем, как использовать его для вашего приложения.
Введение в шаговые двигателиКак и все двигатели, шаговые двигатели также имеют статор и ротор , но в отличие от обычного двигателя постоянного тока статор состоит из отдельных наборов катушек.Количество катушек будет отличаться в зависимости от типа шагового двигателя , но пока просто поймите, что в шаговом двигателе ротор состоит из металлических полюсов, и каждый полюс будет притягиваться набором катушек в статоре. На схеме ниже показан шаговый двигатель с 8 полюсами статора и 6 полюсами ротора.
Если вы посмотрите на катушки на статоре, они расположены в виде пар катушек, как A и A ’образуют пару, B и B’ образуют пару и так далее.Таким образом, каждая из этих пар катушек образует электромагнит, и они могут получать питание индивидуально с помощью схемы драйвера. Когда на катушку подаётся напряжение, она действует как магнит, и полюс ротора выравнивается с ним, когда ротор вращается, чтобы приспособиться к выравниванию со статором, это называется одной ступенью . Точно так же, последовательно запитывая катушки, мы можем вращать двигатель небольшими шагами, чтобы сделать полный оборот.
Типы шаговых двигателейВ основном существуют три типа шаговых двигателей в зависимости от конструкции, а именно:
- Шаговые двигатели с регулируемым сопротивлением: Они имеют ротор с железным сердечником, который притягивается к полюсам статора и обеспечивает движение за счет минимального сопротивления между статором и ротором.
- Шаговые двигатели с постоянными магнитами: Они имеют ротор с постоянными магнитами, и они отталкиваются или притягиваются к статору в соответствии с приложенными импульсами.
- Гибридный синхронный шаговый двигатель: Они представляют собой комбинацию шагового двигателя с переменным сопротивлением и шагового двигателя с постоянным магнитом.
Помимо этого, мы также можем классифицировать шаговые двигатели как униполярные и биполярные в зависимости от типа обмотки статора.
- Биполярный шаговый двигатель: Катушки статора на этом типе двигателя не имеют общего провода.Привод этого типа шагового двигателя отличается и сложен, а схема управления не может быть легко спроектирована без микроконтроллера.
- Униполярный шаговый двигатель: В этом типе шагового двигателя мы можем взять центральное ответвление обеих фазных обмоток на общую землю или на общую мощность, как показано ниже. Это упрощает управление двигателями, в униполярных шаговых двигателях также есть много типов
Поскольку статор шагового режима состоит из разных пар катушек, каждую пару катушек можно возбуждать множеством различных методов, что позволяет управлять режимами во многих различных режимах.Ниже приведены общие классификации
. Полношаговый режимВ режиме полного шага возбуждения мы можем добиться полного вращения на 360 ° с минимальным количеством оборотов (шагов). Но это приводит к меньшей инерции, а также вращение не будет плавным. Есть еще две классификации в режиме полного шага возбуждения, это с пошаговым режимом с одной фазой и двумя режимами с включенной фазой .
1. Однофазное пошаговое включение или пошаговое выполнение волны: В этом режиме только одна клемма (фаза) двигателя будет находиться под напряжением в любой момент времени.Он имеет меньшее количество шагов и, следовательно, может обеспечить полное вращение на 360 °. Поскольку количество шагов меньше, ток, потребляемый этим методом, также очень низкий. В следующей таблице показана последовательность сигналов для 4-фазного шагового двигателя
.| Шаг | Фаза 1 | Фаза 2 | Фаза 3 | Фаза 4 |
| 1 | 1 | 0 | 0 | 0 |
| 2 | 0 | 1 | 0 | 0 |
| 3 | 0 | 0 | 1 | 0 |
| 4 | 0 | 0 | 0 | 1 |
2.Двухэтапное включение: Как видно из названия, в этом методе две фазы будут одной. Он имеет то же количество шагов, что и волновой, но поскольку одновременно возбуждаются две катушки, он может обеспечить лучший крутящий момент и скорость по сравнению с предыдущим методом. Хотя с одной стороны, этот метод потребляет больше энергии.
| Шаг | Фаза 1 | Фаза 2 | Фаза 3 | Фаза 4 |
1 | 1 | 1 | 0 | 0 |
2 | 0 | 1 | 1 | 0 |
| 3 | 0 | 0 | 1 | 1 |
| 4 | 1 | 0 | 0 | 1 |
Полушаговый режим представляет собой комбинацию однофазного и двухфазного режимов.Эта комбинация поможет нам преодолеть вышеупомянутый недостаток обоих режимов.
Как вы, возможно, догадались, поскольку мы комбинируем оба метода, нам придется выполнить 8 шагов в этом методе, чтобы получить полное вращение. Последовательность переключения для 4-фазного шагового двигателя показана ниже
Шаг | Фаза 1 | Фаза 2 | Фаза 3 | Фаза 4 |
1 | 1 | 0 | 0 | 0 |
2 | 1 | 1 | 0 | 0 |
3 | 0 | 1 | 0 | 0 |
4 | 0 | 1 | 1 | 0 |
5 | 0 | 0 | 1 | 1 |
6 | 0 | 0 | 0 | 1 |
7 | 1 | 0 | 0 | 1 |
8 | 1 | 0 | 0 | 0 |
Микрошаговый режим – это комплекс всего, но он предлагает очень хорошую точность наряду с хорошим крутящим моментом и плавной работой.В этом методе катушка возбуждается двумя синусоидальными волнами, разнесенными на 90 °. Таким образом, мы можем контролировать направление и амплитуду тока, протекающего через катушку, что помогает нам увеличить количество шагов, которые двигатель должен сделать за один полный оборот. Микрошаговый режим может достигать 256 шагов для одного полного вращения, что позволяет двигателю вращаться быстрее и плавнее.
Как использовать шаговый двигательХватит скучной теории, допустим, кто-то дает вам шаговый двигатель, например, знаменитый 28-BYJ48, и вам действительно интересно, как он работает.К этому времени вы бы поняли, что невозможно заставить эти двигатели вращаться, просто запитав их от источника питания, так как бы вы это сделали?
Давайте взглянем на этот шаговый двигатель 28-BYJ48 .
Хорошо, в отличие от обычного двигателя постоянного тока, из этого выходят пять проводов всех причудливых цветов, и почему это так? Чтобы понять это, мы должны сначала узнать, как работает степпер, о котором мы уже говорили. Прежде всего, шаговые двигатели не вращаются , они шаговые, поэтому их также называют шаговыми двигателями .Это означает, что они будут двигаться только на один шаг за раз. В этих двигателях присутствует последовательность катушек, и эти катушки должны быть запитаны определенным образом, чтобы двигатель вращался. Когда каждая катушка находится под напряжением, двигатель делает шаг, и последовательность подачи энергии заставляет двигатель делать непрерывные шаги, тем самым заставляя его вращаться. Давайте посмотрим на катушки, присутствующие внутри двигателя, чтобы точно знать, откуда берутся эти провода.
Как вы можете видеть, двигатель имеет однополярную 5-проводную катушку .Есть четыре катушки, которые необходимо включить в определенной последовательности. На красные провода будет подаваться напряжение +5 В, а остальные четыре провода будут заземлены для срабатывания соответствующей катушки. Мы используем любой микроконтроллер, чтобы запитать эти катушки в определенной последовательности и заставить двигатель выполнять необходимое количество шагов. Опять же, есть много последовательностей, которые вы можете использовать, обычно используется 4-шаговый , а для более точного управления также может использоваться 8-шаговый элемент . Таблица последовательности для 4-ступенчатого управления показана ниже.
Шаг | Катушка под напряжением |
Шаг 1 | А и В |
Шаг 2 | B и C |
Шаг 3 | C и D |
Шаг 4 | D и |
Итак, почему этот мотор называется 28-BYJ48 ? Серьезно!!! Я не знаю.У этого двигателя нет никаких технических причин для такого названия; возможно, нам не стоит углубляться в это. Давайте посмотрим на некоторые важные технические данные, полученные из таблицы данных этого двигателя на картинке ниже.
Это очень много информации, но нам нужно взглянуть на несколько важных, чтобы знать, какой тип шагового двигателя мы используем, чтобы мы могли его эффективно программировать. Сначала мы знаем, что это шаговый двигатель 5 В, поскольку на красный провод подается напряжение 5 В.Кроме того, мы знаем, что это четырехфазный шаговый двигатель, поскольку в нем было четыре катушки. Теперь передаточное число равно 1:64. Это означает, что вал, который вы видите снаружи, сделает один полный оборот только в том случае, если двигатель внутри вращается 64 раза. Это связано с шестернями, которые соединены между двигателем и выходным валом, эти шестерни помогают в увеличении крутящего момента.
Еще одна важная информация, на которую следует обратить внимание, – это угол шага : 5,625 ° / 64. Это означает, что двигатель при работе в 8-ступенчатой последовательности будет двигаться на 5.625 градусов для каждого шага, и потребуется 64 шага (5,625 * 64 = 360), чтобы совершить один полный оборот.
Расчет шагов на оборот для шагового двигателяВажно знать, как рассчитать количество шагов на оборот для вашего шагового двигателя, потому что только тогда вы сможете эффективно программировать / управлять им.
Предположим, мы будем работать с двигателем в 4-х шаговой последовательности, поэтому угол шага будет 11,25 °, так как он составляет 5,625 ° (указано в таблице данных) для 8-шаговой последовательности, то он будет 11.25 ° (5,625 * 2 = 11,25).
Шагов на оборот = 360 / угол шага Здесь 360 / 11,25 = 32 шага на оборот.Зачем нужны модули драйверов для шаговых двигателей?
Большинство шаговых двигателей работают только с помощью модуля драйвера. Это связано с тем, что модуль контроллера (микроконтроллер / цифровая схема) не сможет обеспечить достаточный ток от своих контактов ввода / вывода для работы двигателя. Поэтому мы будем использовать внешний модуль, например модуль ULN2003 , в качестве драйвера шагового двигателя .Существует много типов модулей драйвера, и номинальные характеристики одного из них будут меняться в зависимости от типа используемого двигателя. Основным принципом для всех модулей драйвера будет источник / потребление тока, достаточного для работы двигателя. Кроме того, существуют также модули драйверов, в которых заранее запрограммирована логика, но мы не будем обсуждать это здесь.
Если вам интересно узнать , как вращать шаговый двигатель , используя какой-либо микроконтроллер и драйвер IC, то мы рассмотрели много статей о его работе с различными микроконтроллерами:
Теперь я считаю, что у вас достаточно информации, чтобы управлять любым шаговым двигателем, который вам нужен для вашего проекта.Давайте посмотрим на преимущества и недостатки шаговых двигателей.
Преимущества шаговых двигателейОдним из основных преимуществ шагового двигателя является то, что он имеет отличное управление положением и, следовательно, может использоваться для точного управления. Кроме того, он имеет очень хороший удерживающий момент, что делает его идеальным выбором для робототехники. Считается, что шаговые двигатели имеют более продолжительный срок службы, чем обычные двигатели постоянного тока или серводвигатели.
Недостатки шаговых двигателейКак и все двигатели, шаговые двигатели также имеют свои недостатки, поскольку они вращаются небольшими шагами, поэтому не могут достичь высоких скоростей.Кроме того, он потребляет мощность для удержания крутящего момента, даже когда он идеален, что увеличивает потребление энергии.
Управление шаговым двигателем с помощью микроконтроллеров PIC
В этом руководстве вы узнаете, как работают шаговые двигатели и как управлять / управлять шаговым двигателем с помощью микроконтроллеров PIC в MPLAB с XC8. Как управлять направлением и скоростью шагового двигателя с помощью микроконтроллеров PIC. Мы обсудим теоретические принципы работы, а затем разработаем необходимую прошивку и схему для реализации и тестирования всего на практике.Использование униполярных шаговых двигателей с микросхемой драйвера ULN2003 или эквивалентами.
Компоненты, необходимые для этого руководства
| Кол-во. | Имя компонента | Купить На Amazon.com | ||||||
| 1 | PIC16F877A | Добавить | ||||||
| 1 | Драйвер BreadBoard | 1 | ||||||
| Добавить | ||||||||
| 1 | Шаговый двигатель (униполярный или биполярный) | Добавить Добавить | ||||||
| 2 | Кнопки | Добавить | ||||||
| Добавить | Резисторы||||||||
| 1 | Комплект конденсаторов | Добавить Добавить | ||||||
| 1 | Комплект соединительных проводов | Добавить Добавить | ||||||
| 1 | LM7805 Регулятор напряжения (5 В) | Добавить | ||||||
| 1 | Программатор PICkit2 или 3 | Добавить | ||||||
| 1 | Батарея 9 В или источник питания постоянного тока | Добавить Добавить Добавить |
Настройка макетной платы
Что такое шаговые двигатели?
Это поворотный привод, который используется в различных приложениях, где требуется высокоточный двигатель с высоким крутящим моментом.Он действительно хорошо подходит для сложных устройств, где точность является обязательной (например, станки с ЧПУ, 3D-принтеры и т. Д.), В то время как двигатели постоянного тока используются в приложениях, где скорость вращения имеет решающее значение.
Шаговые двигатели бывают двух основных типов: однополярные и биполярные с расположением обмоток. Привод, который мы будем использовать в этом руководстве, – это униполярный шаговый двигатель .
Шаговые двигатели можно также идентифицировать по некоторым дополнительным факторам, помимо расположения обмоток.Номинальное напряжение питания для многих шаговых двигателей находится в диапазоне (5-24) В. Номинальный ток также является еще одним фактором, который всегда пропорционален крутящему моменту. Я всегда держу пари, что крутящий момент шагового двигателя – это фактор номер 1, который следует учитывать при покупке нового шагового двигателя для любого проекта.
Разрешение шагового двигателя
Во многих ситуациях фактор номер 1, который следует учитывать при выборе шагового двигателя, – это его разрешение ! Разрешение шагового двигателя – это количество градусов, на которые он поворачивается за шаг (градусы / шаг).Наиболее часто используемые шаговые двигатели имеют 7,5 ° / шаг и 1,8 ° / шаг. Униполярный двигатель, который мы будем использовать, имеет разрешение 7,5 ° / шаг.
Как работают шаговые двигатели?
Стандартный шаговый двигатель
Основная концепция работы шаговых двигателей практически одинакова, будь то биполярные или униполярные. У нас есть магнит как сердечник ротора посередине. По бокам это обмотка статора (катушки), которые создают магнитное поле, необходимое для вращения магнитопровода.Мы можем думать об обычном шаговом двигателе так, как если бы он выглядел примерно так, как на рисунке ниже (только приблизительное значение для демонстрационных целей).
Это упрощенная версия настоящей обмотки, которая находится в реальном шаговом двигателе, но теоретически это почти то же самое. Магнитный сердечник притягивается к любой катушке, если на нее подано напряжение. Что ж, если вы собираетесь приказать этому двигателю вращаться по часовой стрелке, вы должны активировать (возбуждать) катушки по одной в следующем порядке (1, 2, 3, 4, 1 и т. Д.).Магнитопровод будет следовать за вращающимся полем статора в том же направлении.
В первый раз активирована только катушка 1, а остальные выключены. Во втором случае только катушка 2 включена, остальные выключены, и так далее. Это, очевидно, приведет к вращению шагового двигателя по часовой стрелке.
Full-Step VS Half-Step
Переход от одной катушки к другой называется Full-Step . Это одна фаза за раз. Фактически, для работы того же двигателя существует гораздо меньший шаговый режим.Он называется Half-Step . Например, если мы активировали катушку-1 и катушку-2 одновременно, сердечник, очевидно, останется посередине. Он не будет указывать на катушку-1 или катушку-2, но где-то посередине. Это называется полушагом. В этом руководстве мы будем следовать схеме полного пошагового выполнения, поскольку ее немного проще реализовать.
Теперь давайте более подробно обсудим различия между униполярной и биполярной обмотками.
Униполярный
A Униполярный шаговый двигатель обычно имеет одну обмотку с центральным отводом на фазу.Каждая половина обмотки активируется (запитывается) в каждом направлении магнитного поля. Активация каждой обмотки – относительно простой процесс, поскольку сама система имеет магнитный полюс, который можно поменять местами без инверсии полярности (переключения направления тока). Остальная работа возложена на микроконтроллер, который будет активировать эти катушки в определенном порядке для достижения вращения по часовой стрелке или против часовой стрелки. Типичная временная диаграмма для последовательности активации катушки шагового двигателя будет выглядеть, как показано ниже.
Биполярный
Биполярный шаговый двигатель обычно имеет только одну обмотку на фазу статора. Двухфазный биполярный шаговый двигатель, очевидно, будет иметь 4 вывода. Для биполярных шаговых двигателей нет общего вывода, в отличие от униполярных. Вот почему нет внутренней инверсии полярности. Это означает, что мы должны добавить схему драйвера H-Bridge, чтобы добиться требуемой инверсии полярности.
Униполярный VS биполярный
Как униполярные, так и биполярные шаговые двигатели используются в очень широком диапазоне приложений в сообществе производителей.Однако каждая из этих схем имеет свои преимущества и недостатки.
Например, униполярными шаговыми двигателями можно легко управлять с помощью микроконтроллера и массива транзисторов IC (например, ULN2003). Но вы легко заметите их низкий крутящий момент. Очевидно, это связано с тем, что за один раз ток проходит только через половину обмотки (катушки).
Биполярные шаговые двигатели, с другой стороны, намного сложнее контролировать и сопрягать. Вы должны создать схему драйвера с изменением полярности (например,г. H-Bridge), который немного сложнее построить. Но положительным моментом является то, что вы получите более высокий крутящий момент из-за протекания тока через всю обмотку (катушку).
Как подключить шаговые двигатели к PIC uC?
Двигатели, приводы и другие нагрузки нельзя напрямую подключить к любому микроконтроллеру любой ценой. Это, очевидно, приведет к повреждению вашего микроконтроллера из-за перегрузки по току. Если вы все еще помните из учебника 4, максимальный ток, который может быть получен или потреблен любыми выводами ввода-вывода, ограничен 25 мА.
По этой причине мы будем использовать массив из 4-х транзисторов для включения и выключения обмотки (катушек) шагового двигателя. Интегрированным решением для этой цели является ИС под названием ULN2803, которая в основном состоит из 8-транзисторных пар Дарлингтона.
Эта микросхема будет работать как интерфейс между четырьмя выходными контактами микроконтроллера и 4-катушками обмотки шаговых двигателей. Он также должен быть подключен к источнику питания, необходимому для привода двигателя. Вы должны проверить техническое описание вашего двигателя, чтобы быть уверенным в рабочем напряжении, будь то 5 В, 12 В или что-то еще.
Вы можете скачать техническое описание шагового двигателя, который я использую в этом руководстве, по этой ссылке.
Загрузить техническое описание униполярного шагового двигателя
Схема подключения этого чипа показана ниже.
Микроконтроллер PIC, управляющий шаговым двигателем – LAB
| Название лаборатории | Управляющий шаговый двигатель | ||
| Номер лаборатории | Новичок | ||
| Лабораторные задачи | Научитесь управлять шаговыми двигателями, напишите необходимую прошивку, чтобы заставить его повернуть 1 полный оборот CW (по часовой стрелке), затем еще 1 оборот CCW (против часовой стрелки) и создайте необходимую аппаратную схему, чтобы правильно управлять нашим двигателем. |
Откройте MPLAB IDE и создайте новый проект с именем «Stepper_Driver». Если у вас возникнут проблемы с этим, вы всегда можете обратиться к предыдущему руководству по ссылке ниже.
Установите бит конфигурации, чтобы они соответствовали общей настройке, о которой мы говорили ранее. И если у вас также возникнут проблемы с созданием этого файла, вы всегда можете обратиться к предыдущему руководству по ссылке ниже.
Теперь откройте файл main.c и приступим к разработке прошивки для нашего проекта.
Наша задача состоит в том, чтобы вывести битовую комбинацию, показанную ранее, чтобы заставить шаговый двигатель совершить полный оборот в направлении CW, затем изменить выходную битовую комбинацию, чтобы добиться вращения против часовой стрелки, и продолжать повторять это поведение.
Используемый нами униполярный шаговый двигатель имеет разрешение 7,5 ° / шаг. Это означает, что для полного вращения, очевидно, потребуется 360/7.5 = 48 Полный шаг!
Допустим, мы будем использовать PORTB в качестве порта вывода. Поскольку мы подключим наименее значимые 4 контакта (B0, B1, B2 и B3) к транзисторам драйвера с 4 катушками в микросхеме ULN2803 IC. Чтобы установить эти контакты [от RB0 до RB3 ] в качестве выходных контактов и инициализировать состояние этих контактов как LOW (логический 0), мы напишем следующий код.
TRISB0 = 0; TRISB1 = 0; TRISB2 = 0; TRISB3 = 0; RB0 = 0; RB1 = 0; RB2 = 0; RB3 = 0; |
Что ж, это можно было бы сделать гораздо проще.Пока мы не используем контакты [от RB4 до RB7 ], устанавливая весь PORTB как выходной порт и инициализируя все его контакты как LOW. Только 2 LOC сделают взлом.
void main () { TRISB = 0x00; PORTB = 0x00; // Инициализируется как НИЗКИЙ , а (1) { // Повернуть по часовой стрелке … // Повернуть против часовой стрелки … } } |
| Примечание | |||
Рекомендуется давать начальные значения (состояния) выходным контактам сразу после их установки в качестве выходных контактов.Это гарантирует выходную линию без сбоев, что особенно важно для чувствительных систем. | |||
И теперь мы закончили с частью конфигурации. Перейдем к основному циклу системы. В котором мы будем вращаться по часовой и против часовой стрелки.
Вращение по часовой стрелке
Порядок последовательно активируемых катушек определяет направление вращения двигателя. Если активация катушек в этом порядке [1 -> 2 -> 3 -> 4] приводит к вращению по часовой стрелке, то активация их в этом порядке [4 -> 3 -> 2 -> 1] приводит к вращению против часовой стрелки.Каждые два последовательных шага разделяются временной задержкой, называемой StepDelay . Следующий код покажет вам, как мы можем реализовать эти концепции в C.
// Создать переменную битового сдвига unsigned char i = 0; // Поверните на одну сторону для (int j = 0; j <48; j ++) { PORTB = (1 << i); i ++; // Переход к следующему выходному выводу __delay_ms (100); // StepDelay if (i == 4) i = 0; } |
- Выходной битовый шаблон @ PORTB во время раунда в этом цикле for будет (0000 0001 ).Это 8-битное представление значения (1), сдвинутого влево на (i = 0) раз.
- Выходной битовый шаблон @ PORTB во время раунд-2 в этом цикле for будет (0000 0010 ). Это 8-битное представление значения (1), сдвинутого влево в (i = 1) раз.
- Выходной битовый шаблон @ PORTB во время раунд-3 в этом цикле for будет (0000 0100 ). Это 8-битное представление значения (1), сдвинутого влево в (i = 2) раза.
- Выходной битовый шаблон @ PORTB во время раунда 4 в этом цикле for будет (0000 1000 ).Это 8-битное представление значения (1), сдвинутого влево в (i = 3) раза.
Это приведет к срабатыванию каждой катушки одновременно в точности в том же порядке, что и ранее на этой диаграмме.
После 48-раундового выполнения этого цикла for, шаговый двигатель завершит полный поворот на 360 ° в одном направлении.
Вращение против часовой стрелки
Чтобы изменить направление вращения, мы внесем несколько изменений в предыдущий код. Как показано ниже
// Создать переменную смещения битов unsigned char i = 0; // Поверните другую сторону для (int j = 0, i = 0; j <48; j ++) { PORTB = (8 >> i); i ++; __delay_ms (100); если (i == 4) i = 0; } |
| Примечание | |||
Десятичное значение, соответствующее этому битовому шаблону (1000), составляет 8 , которое будет сдвинуто вправо для получения следующего шаблоны (0100), (0010) и (0001). | |||
Теперь вставьте этот код в свой файл main.c или загрузите полный код проекта из раздела вложений. Скрестить пальцы! Нажмите кнопку компиляции! И мы закончили прошивку.
2. МоделированиеСхема этой лаборатории показана ниже. Просто создайте аналогичный в своем симуляторе.
После подключения всего в симуляторе вам нужно будет дважды щелкнуть микросхему MCU и указать код прошивки .hex , убедитесь, что вы моделируете свой проект на той же частоте генератора, что и в коде. В противном случае временная диаграмма будет искажена.
3. ПрототипированиеВы должны были создать базовую установку прототипа, которую мы продемонстрировали ранее. Если при этом у вас возникнут какие-либо проблемы, вы можете обратиться к предыдущему руководству.
Соединения для шагового двигателя и микросхемы ULN2803 в конечном итоге будут похожи на мою плату, показанную ниже.
Подключите порт ICSP программатора, прошейте код, подключите источник питания и проверьте это!
Последний работающий проект, если вам интересно.
Шаговый двигатель, управляемый движением с помощью PIC uC – LAB
| Название лаборатории | |
| 5 | |
| Уровень лаборатории | Начинающий |
| Задачи лаборатории | Научитесь управлять шаговыми двигателями, напишите необходимую прошивку, чтобы он вращался на CW при нажатии кнопки ввода и CCW , в то время как другая кнопка нажата, и создайте необходимую аппаратную схему, чтобы правильно управлять нашим двигателем. |
Откройте MPLAB IDE и создайте новый проект с именем «Stepper_Controlled». Если у вас возникнут проблемы с этим, вы всегда можете обратиться к предыдущему руководству по ссылке ниже.
Установите бит конфигурации, чтобы они соответствовали общей настройке, о которой мы говорили ранее. И если у вас также возникнут проблемы с созданием этого файла, вы всегда можете обратиться к предыдущему руководству по ссылке ниже.
Теперь откройте файл main.c и приступим к разработке прошивки для нашего проекта.
Наша задача – вывести битовую последовательность, показанную ранее, чтобы шаговый двигатель вращался по часовой и против часовой стрелки в ответ на события нажатия пользовательской кнопки. На самом деле будет две кнопки, которые будут подключены к паре входных контактов.
Выходные битовые шаблоны в обоих случаях обычно такие же, как в LAB4. Следовательно, полный c-код для этой лаборатории будет таким, как показано ниже.
1 2 3 4 5 6 7 8 9 10 11 120003 120002 16 17 18 19 20 21 22 23 24 25 26 27 28 2 29000 33 34 35 | void main (void) { // Создать переменную битового сдвига unsigned char i = 0; // Установите 8 контактов PORTB в качестве выходных контактов TRISB = 0x00; // Установите все выводы PORTB в положение OFF (изначально)! PORTB = 0x00; // Установить контакты RC0, RC1 как входные TRISC0 = 1; TRISC1 = 1; // Создайте основную процедуру системы! while (1) { // Пока кнопка Button1 нажата, повернуть CW while (RC0) { PORTB = (1 << i); i ++; __delay_ms (100); если (i == 4) i = 0; } // Пока кнопка 2 нажата, поверните против часовой стрелки , пока (RC1) { PORTB = (8 >> i); i ++; __delay_ms (100); если (i == 4) i = 0; } } возврат; } |
Скрестите пальцы! Нажмите кнопку компиляции! И мы закончили прошивку.
2. МоделированиеСхема этой лаборатории показана ниже. Просто создайте аналогичный в своем симуляторе.
После подключения всего в вашем симуляторе вам нужно будет дважды щелкнуть микросхему MCU и указать на файл прошивки .hex , убедитесь, что симулируете ваш проект на той же частоте генератора, что и в коде. . В противном случае временная диаграмма будет искажена.
3.Создание прототипаВы должны были создать базовую настройку прототипа, которую мы продемонстрировали ранее. Если при этом у вас возникнут какие-либо проблемы, вы можете обратиться к предыдущему руководству.
Соединения для этой LAB ничем не отличаются от LAB4. Однако не забудьте подключить кнопку к RC0 и RC1 с помощью резисторов (Pull-Down). В противном случае логическая инверсия перенесет вас в настоящий кошмар. Все остальное должно оставаться прежним.
Подключите порт ICSP программатора, прошейте код, подключите источник питания и проверьте это!
Последний работающий проект, если вам интересно.
Управление скоростью шагового двигателя с помощью PIC uC – LAB
| Название лаборатории | 9024 Номер 9024 Управление скоростью шагового двигателя | 6 |
| Уровень лаборатории | Начинающий | |
| Задачи лаборатории | Научитесь управлять шаговыми двигателями, напишите необходимое микропрограммное обеспечение, чтобы заставить его вращаться с разными уровнями скорости, и построить необходимую схему аппаратного обеспечения чтобы правильно управлять нашим мотором.Наконец, сравним результаты и сделаем некоторые выводы. |
Откройте MPLAB IDE и создайте новый проект с именем «Stepper_Speed_Control». Если у вас возникнут проблемы с этим, вы всегда можете обратиться к предыдущему руководству по ссылке ниже.
Установите бит конфигурации, чтобы они соответствовали общей настройке, о которой мы говорили ранее. И если у вас также возникнут проблемы с созданием этого файла, вы всегда можете обратиться к предыдущему руководству по ссылке ниже.
Теперь откройте файл main.c и приступим к разработке прошивки для нашего проекта.
В этой лаборатории мы выполним точно такую же операцию в LAB4. Но мы будем контролировать скорость вращения, регулируя значение StepDelay. Что, очевидно, контролирует, сколько времени требуется шаговому двигателю для выполнения полного шага. Следовательно, у нас есть полный контроль над временем, за которое шаговый двигатель совершает полный оборот (48 шагов).
Полный список кодов для этой лаборатории выглядит следующим образом.
1 2 3 4 5 6 7 8 9 10 11 120003 120002 16 17 18 19 20 21 22 23 24 25 26 27 28 2 29000 33 34 | void main (void) { // Создание переменной с битовым смещением unsigned char i = 0; // Установите 8 контактов PORTB в качестве выходных контактов TRISB = 0x00; // Установите все выводы PORTB в положение OFF (изначально)! PORTB = 0x00; // Создайте основную процедуру системы! while (1) { // Поверните одну сторону для (int j = 0; j <48; j ++) { PORTB = (1 << i); i ++; __delay_ms (x); // StepDelay if (i == 4) i = 0; } // Подождите секунду! __delay_ms (1000); // Переверните другую сторону for (int j = 0, i = 0; j <48; j ++) { PORTB = (8 >> i); i ++; __delay_ms (x); // StepDelay if (i == 4) i = 0; } } возврат; } |
Вы должны заметить, что __delay_ms – это макрос, а не функция.Вот почему вы ни в коем случае не можете передать ему переменную. Однако вы также можете использовать директиву #define, чтобы определить значение x, которое вы хотите.
- Начнем экспериментировать с x = 100. И понаблюдаем за скоростью вращения двигателя.
- Затем измените его на x = 50. И посмотрите на новую скорость двигателя.
- Теперь давайте уменьшим время задержки, чтобы оно было слишком маленьким. пусть x = 10. Посмотрите, что происходит.
- Наконец, позвольте StepDelay около 25 мс, это должно дать вам максимальную скорость вращения без сбоев.
Вот последний запущенный проект в каждом случае. Если вам это интересно!
| Pro Tip | |||
Скорость вращения шагового двигателя в обычных ситуациях несущественна. Однако им можно легко управлять, регулируя временные интервалы задержки между каждыми двумя последовательными шагами. Но вы должны знать, что существует фундаментальное ограничение его скорости.Все, что вам нужно знать о конкретном шаговом двигателе, можно найти в его техническом описании. | |||
| Примечание | |||
Управление скоростью шагового двигателя – довольно тривиальная работа. Однако это может быть очень полезно в некоторых конкретных ситуациях. Но здесь следует отметить, что шаговые двигатели не используются в приложениях, требующих высокой скорости вращения. Для высокой скорости вам следует искать двигатель постоянного тока или бесщеточный двигатель.Но когда дело доходит до точности и крутящего момента, вам следует искать подходящий шаговый двигатель. Вот почему он используется в 3D-принтерах и станках с ЧПУ. | |||
Этапы моделирования и создания прототипов для этой лаборатории обычно такие же, как и для LAB4. Так что я уверен, что вы сможете провести эти эксперименты самостоятельно. Любые файлы, которые могут вам понадобиться, всегда включены в раздел загрузок.
Приготовьтесь к следующей демонстрации, это будет теоретический урок.Тем не менее, это совершенно необходимо для всех футуристических практических лабораторий и проектов. Так что держись!
Загружаемые файлы
Скачать файлы проекта
Как это:
Как Загрузка …
Что такое шаговый двигатель?
Шаговый двигатель – это бесщеточный синхронный электродвигатель, который преобразует цифровые импульсы в механическое вращение вала.Его нормальное движение вала состоит из дискретных угловых движений. движения практически одинаковой величины при управлении от последовательно переключаемого постоянного тока источник питания.Шаговый двигатель – это устройство цифрового ввода-вывода. Он особенно хорошо подходит для типа приложение, в котором управляющие сигналы появляются в виде цифровых импульсов, а не аналоговых напряжений. Один цифровой импульс на привод шагового двигателя или преобразователь заставляет двигатель увеличивать один точный угол движения. По мере увеличения частоты цифровых импульсов шаговое движение меняется на непрерывное вращение.
Некоторые промышленные и научные применения шаговых двигателей включают робототехнику, станки, механизмы захвата и размещения, автоматизированные машины для резки и склеивания проволоки и даже точные устройства управления потоками.
Как работает шаговый двигатель?
Каждый оборот шагового двигателя делится на дискретное количество шагов, во многих случаях 200 шагов, и для каждого шага двигателю необходимо посылать отдельный импульс.Шаговый двигатель может делать только один шаг за раз, и каждый шаг одинакового размера.Поскольку каждый импульс заставляет двигатель вращаться на точный угол, обычно 1,8 °, положением двигателя можно управлять без какого-либо механизма обратной связи. По мере увеличения частоты цифровых импульсов шаговое движение превращается в непрерывное вращение, при этом скорость вращения прямо пропорциональна частоте импульсов.
Шаговые двигатели используются каждый день как в промышленных, так и в коммерческих целях из-за их низкой стоимости, высокой надежности, высокого крутящего момента на низких скоростях и простой, прочной конструкции, которая работает практически в любых условиях.
- Угол поворота двигателя пропорционален входному импульсу.
- Двигатель имеет полный крутящий момент в состоянии покоя (если обмотки находятся под напряжением).
- Точное позиционирование и повторяемость движения, поскольку хорошие шаговые двигатели имеют точность от 3 до 5% шага, и эта ошибка не суммируется от одного шага к другому.
- Отличная реакция на пуск / остановку / движение задним ходом.
- Очень надежен, так как в двигателе нет контактных щеток. Следовательно, срок службы шагового двигателя просто зависит от срока службы подшипника.
- Шаговые двигатели, реагирующие на импульсы цифрового входа, обеспечивают управление без обратной связи, что упрощает управление двигателем и снижает его стоимость.
- Можно добиться синхронного вращения на очень низкой скорости с нагрузкой, непосредственно связанной с валом.
- Может быть реализован широкий диапазон скоростей вращения, поскольку скорость пропорциональна частоте входных импульсов.
Выбор шагового двигателя и контроллера
Выбор шагового двигателя зависит от требований к крутящему моменту и скорости. Используйте кривую крутящий момент-скорость двигателя (указанную в технических характеристиках каждого привода), чтобы выбрать двигатель, который будет выполнять эту работу.Каждый контроллер шагового двигателя в строке Omegamation показывает кривые крутящий момент-скорость для рекомендуемых двигателей этого привода.Если ваши требования к крутящему моменту и скорости могут быть удовлетворены с помощью нескольких шаговых двигателей, выберите контроллер, основанный на потребностях вашей системы движения – шаг / направление, автономный программируемый, аналоговые входы, микрошаговый – затем выберите один из рекомендуемых двигателей для этого контроллера. .
Список рекомендуемых двигателей основан на обширных испытаниях, проведенных производителем для обеспечения оптимальной производительности комбинации шагового двигателя и контроллера.
Типы шаговых двигателей
Существует три основных типа шаговых двигателей:- Активный ротор: шаговый двигатель с постоянными магнитами (PM)
- Реактивный ротор: шаговый двигатель с регулируемым сопротивлением (VR)
- Комбинация VR и PM: гибридный шаговый двигатель (HY)
Шаговый двигатель с постоянным магнитом
Этот тип шагового двигателя имеет ротор с постоянными магнитами. Статор может быть аналогичен традиционному 2- или 3-фазному индуктивному двигатель или сконструированный аналогично штампованному двигателю. Последний является самый популярный тип шагового двигателя.a.) Обычный постоянный магнит. На рисунке 1 показана схема обычного шаговый двигатель с ротором с постоянными магнитами.2-х фазная обмотка проиллюстрировано. На рисунке 1а показана фаза А. запитан с положительной клеммы «A». Поле находится под углом 0 °. Когда катушка намотана, как показано, северный полюс ротор также находится на 0 °.
Вал совершает один оборот за каждый полный оборот электромагнитного поля в этом двигателе. На рисунке 2 показан тот же шаговый двигатель с обеими обмотками под напряжением. Важный разница в том, что результирующее электромагнитное поле находится между два полюса.На рисунке 2 поле переместилось на 45 ° от поле на рисунке 1.
Как и в схеме однофазного включения, вал завершает один оборот за каждый полный оборот электромагнитного поля. Должно быть очевидно, что этот мотор может полушага; т.е. шаг в малом шаг шага. Это возможно за счет сочетания подачи питания показано на Рисунке 1, с показанным на Рисунке 2. На Рисунке 3 показаны схемы Шаговый двигатель с постоянными магнитами с полушаговым движением ротора.
Как и на предыдущих схемах, ротор и вал движутся через тот же угол, что и поле. Обратите внимание, что каждый шаг приводил к повороту на 45 °. вместо 90 ° на предыдущей диаграмме. Шаговый двигатель с постоянным магнитом может быть намотан бифилярным двигателем. обмотки, чтобы избежать необходимости обратной полярности обмотка. На рисунке 4 показана бифилярная обмотка при В таблице IV показана последовательность включения.
Бифилярные обмотки проще переключать с помощью транзисторного контроллера.Требуется меньше переключающих транзисторов. б.) Штампованные или штабелированные шаговые двигатели с постоянными магнитами. В самый популярный тип шагового двигателя с постоянным магнитом – это так называется штампованным типом, зубчатым когтем, листовым металлом, жестяной банкой или просто невысокая стоимость мотора. Этот мотор сложно проиллюстрировать наглядно из-за того, как он построен.
Этот двигатель имеет пару катушек, окружающих ротор с постоянными магнитами. Катушки заключены в корпус из мягкого железа с зубьями на внутри реагирует с ротором.Каждый корпус катушки имеет одинаковый количество зубьев как количество полюсов ротора. Корпуса радиально смещены друг относительно друга на половину шага зубьев.
Шаговый двигатель с регулируемым сопротивлением
Этот тип шагового двигателя имеет электромагнитный статор с ротор из магнитомягкого железа с зубьями и пазами, подобными ротору ротор индукторного генератора. В то время как двигатели с постоянными магнитами в основном Для двухфазных машин, для двигателей VR требуется не менее 3-х фаз. Большинство VR шаговые двигатели имеют 3 или 4 фазы, хотя 5-фазные двигатели VR имеется в наличии.В шаговом двигателе VR поле движется с другой скоростью, чем ротор.
Обратите внимание, что катушка фазы A имеет два южные полюса и отсутствие северных полюсов для пути возврата потока. Вы можете отдохнуть уверен, что будет один. Поток вернется через путь наименьшего сопротивления, а именно через пары полюсов, которые являются ближайшими до двух зубьев ротора. Это зависит от положения ротора. Поток индуцирует напряжение в катушках, намотанных на полюс. Это вызывает ток в обмотка, замедляющая ротор.Величина тока определяется напряжение на катушке. Катушка с диодным зажимом будет иметь больше тока, чем резисторный диод или обмотка с фиксатором стабилитрона.
Гибридный шаговый двигатель
Этот тип двигателя часто называют постоянным магнитом. мотор. Он использует комбинацию постоянного магнита и переменного структура сопротивления. Его конструкция аналогична конструкции Индукционный двигатель.Ротор имеет два концевые детали (хомуты) с выступающими полюсами, расположенными на одинаковом расстоянии, но радиально смещены друг от друга на половину шага зубьев.Круглый перманент магнит разделяет их. Ярма имеют практически равномерный поток. противоположной полярности. Статор изготовлен из многослойной стали. Некоторые двигатели имеют 4 катушки. в две группы по 2 катушки последовательно. Одна пара катушек называется фазой A и другая фаза B.
Число полных шагов на оборот может быть определено из по следующей формуле:
SPR = NR x Ø
Где: SPR = количество шагов на оборот
NR = общее количество зубьев ротора (всего для оба хомута)
Ø = количество фаз двигателя
или: NR = SPR / Ø
Они сконструированы с полюсами статора с несколькими зубьями и ротором с постоянными магнитами.Стандартные гибридные двигатели имеют 200 зубцов ротора и вращаются с шагом 1,8 °. Поскольку они демонстрируют высокий статический и динамический крутящий момент и работают с очень высокой частотой шагов, гибридные шаговые двигатели используются в широком спектре коммерческих приложений, включая компьютерные дисководы, принтеры / плоттеры и проигрыватели компакт-дисков.
Пошаговые режимы
«Шаговые режимы» шагового двигателя включают полный, половинный и микрошаговый. Тип выхода шагового режима любого шагового двигателя зависит от конструкции контроллера.Omegamation ™ предлагает приводы с шаговыми двигателями с переключаемыми полными и полушаговыми режимами, а также микрошаговые приводы с выбираемым переключателем или программно выбираемым разрешением.Полный шаг
Стандартные гибридные шаговые двигатели имеют 200 зубцов ротора или 200 полных шагов на оборот вала двигателя. Разделение 200 шагов на 360 ° вращения равняется полному углу шага 1,8 °. Обычно режим полного шага достигается за счет подачи питания на обе обмотки при попеременном реверсировании тока.По сути, один цифровой импульс от драйвера эквивалентен одному шагу.Полушаг
Полушаг просто означает, что шаговый двигатель вращается со скоростью 400 шагов за оборот. В этом режиме запитывается одна обмотка, а затем поочередно запитываются две обмотки, в результате чего ротор вращается на половину расстояния, или 0,9 °. Хотя он обеспечивает примерно на 30% меньше крутящего момента, полушаговый режим обеспечивает более плавное движение, чем полушаговый режим.Microste
Микрошаговый двигатель – это относительно новая технология шагового двигателя, которая регулирует ток в обмотке двигателя до такой степени, что дополнительно подразделяет количество позиций между полюсами.Микрошаговые приводыOmegamation способны разделять полный шаг (1,8 °) на 256 микрошагов, что дает 51 200 шагов на оборот (0,007 ° / шаг). Микрошаг обычно используется в приложениях, требующих точного позиционирования и более плавного движения в широком диапазоне скоростей. Как и полушаговый режим, микрошаговый режим обеспечивает примерно на 30% меньше крутящего момента, чем полушаговый режим.
Управление линейным шаговым двигателем
Вращательное движение шагового двигателя может быть преобразовано в линейное движение с помощью системы привода ходового винта / червячной передачи (см. Рисунок B).Шаг или шаг ходового винта – это линейное расстояние, пройденное за один оборот винта. Если шаг равен одному дюйму на оборот и имеется 200 полных шагов на оборот, то разрешение системы ходового винта составляет 0,005 дюйма на шаг. Еще более высокое разрешение возможно при использовании шагового двигателя / системы привода в микрошаговом режиме. Серияи параллельное соединение
Есть два способа подключения шагового двигателя: последовательно или параллельно.Последовательное соединение обеспечивает высокую индуктивность и, следовательно, больший крутящий момент на низких скоростях. Параллельное соединение снижает индуктивность, что приводит к увеличению крутящего момента на более высоких скоростях.Контроллер шагового двигателя Обзор технологии
Драйвер получает сигналы шага и направления от индексатора или контроллера шагового двигателя и преобразует их в электрические сигналы для запуска шагового двигателя. На каждую ступень вала двигателя требуется один импульс.В полношаговом режиме со стандартным 200-шаговым двигателем требуется 200 шаговых импульсов для совершения одного оборота. Скорость вращения прямо пропорциональна частоте импульсов. Некоторые системы управления имеют встроенный генератор, который позволяет использовать внешний аналоговый сигнал или джойстик для установки скорости двигателя.
Скорость и крутящий момент шагового двигателя основаны на протекании тока от драйвера к обмотке двигателя. Фактор, который препятствует потоку или ограничивает время, необходимое току для возбуждения обмотки, известен как индуктивность.Влияние индуктивности, большинство типов цепей управления предназначены для подачи большего количества напряжения, чем номинальное напряжение двигателя.
Чем выше выходное напряжение контроллера, тем выше уровень крутящего момента в зависимости от скорости. Как правило, выходное напряжение драйвера (напряжение шины) должно быть в 5-20 раз выше номинального напряжения двигателя. Чтобы защитить двигатель от повреждения, привод шагового двигателя должен быть ограничен по току до номинального тока шагового двигателя.
Обзор контроллера шагового двигателя
Индексатор, или контроллер шагового двигателя, предоставляет драйверу выходные данные шага и направления. Для большинства приложений требуется, чтобы индексатор управлял и другими функциями управления, включая ускорение, замедление, количество шагов в секунду и расстояние. Индексатор также может взаимодействовать со многими другими внешними сигналами и управлять ими.Связь с системой управления осуществляется через последовательный порт RS-232 и в некоторых случаях порт RS485.В любом случае контроллер шагового двигателя способен принимать высокоуровневые команды от главного компьютера и генерировать необходимые импульсы шага и направления для драйвера.
Контроллер включает в себя дополнительные входы / выходы для мониторинга входов от внешних источников, таких как пусковой, толчковый, исходный или концевой выключатель. Он также может запускать другие функции машины через выходные контакты ввода / вывода.
Автономная работа
В автономном режиме контроллер может работать независимо от главного компьютера.После загрузки в энергонезависимую память программы движения можно запускать с различных типов операторских интерфейсов, таких как клавиатура или сенсорный экран, или с переключателя через вспомогательные входы / выходы.Автономная система управления шаговым двигателем часто комплектуется драйвером, источником питания и дополнительной обратной связью энкодера для приложений с «замкнутым контуром», требующих обнаружения опрокидывания и точной компенсации положения двигателя.
Многоосевое управление
Многие приложения для управления движением требуют управления более чем одним шаговым двигателем.В таких случаях доступен контроллер многоосевого шагового двигателя. К сетевому концентратору HUB 444, например, может быть подключено до четырех шаговых приводов, причем каждый привод подключен к отдельному шаговому двигателю. Сетевой концентратор обеспечивает скоординированное перемещение приложений, требующих высокой степени синхронизации, например круговой или линейной интерполяции.Разница между униполярными и биполярными шаговыми двигателями
Униполярный шаговый двигатель работает с одной обмоткой с центральным отводом на фазу.Каждая секция обмотки включается для каждого направления магнитного поля. Каждая обмотка сделана относительно простой схемой коммутации, это сделано, поскольку устройство имеет магнитный полюс, который можно поменять местами без переключения направления тока. В большинстве случаев, учитывая фазу, общий центральный отвод для каждой обмотки следующий; три вывода на фазу и шесть выводов для обычного двухфазного шагового двигателя.
Обычно вы видите, что обе эти фазы часто соединяются внутри, поэтому у шагового двигателя всего пять выводов.Часто контроллер шагового двигателя используется для активации управляющих транзисторов в правильном порядке. Поскольку этими шаговыми двигателями довольно легко управлять, они часто очень популярны среди любителей и, как правило, являются самым дешевым способом получения точных угловых перемещений.
У биполярных шаговых двигателей только одна обмотка на фазу. Схема управления должна быть более сложной, чтобы перевернуть магнитный полюс, это делается для реверсирования тока в обмотке. Это делается с помощью H-мостовой схемы, однако есть несколько микросхем драйверов, которые могут быть приобретены, чтобы упростить эту задачу.В отличие от униполярного шагового двигателя, биполярный шаговый двигатель имеет два вывода на фазу, ни один из которых не является общим. Эффекты статического трения действительно возникают с H-образным мостом с определенными топологиями привода, однако его можно уменьшить за счет сглаживания сигнала шагового двигателя на более высокой частоте.
Биполярные двигатели обычно лучше униполярных. У них больше крутящего момента и они более эффективны.
Однако управлять ими сложнее, потому что им нужен обратный ток.
Конструктивно биполярные двигатели имеют несколько (не менее двух) независимых обмоток. Проволока выходит из каждого конца обмотки, так что получается по два провода на обмотку.
Униполярные двигатели также имеют несколько обмоток, однако, помимо того, что концы каждой обмотки подключены к проводам, середина также подключается к третьему проводу.
Отсутствие этого третьего провода означает, что биполярные двигатели немного проще изготовить.
Когда дело доходит до управления этими двигателями, для более простого биполярного двигателя требуется более сложный драйвер.Это связано с тем, что для точного управления его движением нам нужно иметь возможность направлять ток в каждую обмотку в обоих направлениях.
С другой стороны, в униполярном двигателе можно обойтись током, который течет только в одном направлении. Это означает, что электронику драйвера можно сделать проще.
