
Фазы питания процессора – что это. Разъяснение сути и терминологии
Когда речь заходит о материнских платах, разговор практически никогда не обходится без того, сколько фаз питания процессора применено в той или иной модели. Этот параметр не часто указывается в спецификациях на материнскую плату, но непременно фигурирует в обзорах той или иной модели, да и на многочисленных форумах и обсуждениях системных плат и/или чипсетов о питании CPU речь заходит всегда. Иногда упоминание о количестве фаз присутствует в рекламных материалах или на коробке материнской платы. Фазы питания процессора – что это, что они делают, для чего нужны и сколько их вообще надо? Давайте разбираться.
Что такое фазы питания
Чтобы знать, о чем собственно речь, давайте обратимся к фотографии материнской платы, вернее, к части ее, расположенной возле процессорного сокета. Вот типичная картина того, что можно увидеть на любой плате.
Что-то похожее вы сможете найти и на своей. Разница будет только в количестве компонентов, окружающих сокет.
Если рассматривать устройство каждой фазы питания, то можно выделить несколько блоков по своему назначению.
Все обозначения постепенно станут понятны.
Итак, что это такое? Современные блоки питания (БП) выдают напряжения ±12 В, ±5 В и +3.3 В. Однако современным процессорам необходимо гораздо меньше – порядка одного вольта, отклоняясь в ту или иную сторону в зависимости от нагрузки. При этом, если посмотреть на спецификации CPU, мы найдем такой параметр, как «Расчетная мощность» (он же TDP – расчетная тепловая мощность). В данном случае это величина, относящаяся к системе охлаждения, которая должна справляться с такой тепловой мощностью. Данное значение не эквивалентно энергопотреблению процессора, тем более оно меняется в зависимости от нагрузки и нагрева, но весьма близко к нему.
Так, если обратиться к спецификации CPU Intel Core i7-7700, то расчетная мощность составляет 65 Вт. В нашем случае не столь важно, сколько точно потребляет данный процессор. Просто предположим, что его энергопотребление и составляет 65 Вт.
Значит, система питания CPU должна обеспечить подвод такой мощности. Т. к. готового напряжения от блока питания мы не получаем, значит, придется подготовить нужное его значение. Для этого и служит система питания CPU.
Устройство и принцип действия
В качестве исходного напряжения берется +12 В, которое поступает непосредственно от используемого БП. Теперь надо выполнить преобразование, понизив напряжение до нужного значения. Этим занимается VRM (Voltage Regulation Module — модуль регулирования напряжения).
Сам VRM состоит из нескольких частей, это:
- PWM-контроллер (ШИМ-контроллер).
- Драйвер.
- MOSFET-транзисторы.
- Дроссель (индуктивность).
- Конденсатор.
Сейчас часто драйвер и пара MOSFET-транзисторов объединены в один корпус, а не являются дискретными элементами. Сути дела это не меняет. В одном корпусе или в разных – все это перечень компонентов, составляющих фазу питания CPU.
Основным управляющим элементом выступает PWM-контроллер. (Напомню, что аббревиатура PWM расшифровывается как широтно-импульсная модуляция – ШИМ). Он генерирует прямоугольные импульсы с установленной частотой, амплитудой и скважностью. Они подаются на электронный ключ (драйвер).
(Напомню, что аббревиатура PWM расшифровывается как широтно-импульсная модуляция – ШИМ). Он генерирует прямоугольные импульсы с установленной частотой, амплитудой и скважностью. Они подаются на электронный ключ (драйвер).
Скважность импульса определяет уровень выходного напряжения, которая вычисляется как отношение периода к длительности импульса. Таким образом, этот электронный ключ постоянно подключает/отключает входное напряжение, равное +12 В, к этому напряжению подключена нагрузка.
Сам электронный ключ состоит из пары MOSFET-транзисторов (n-канальные полевые МОП-транзисторы) под управлением драйвера. Эти транзисторы попеременно открываются-закрываются таким образом, что при открытии одного второй закрыт. Один из транзисторов своим стоком подключен к шине питания 12 В, второй – истоком к общему проводу. Сигнал от PWM-контроллера поступает на затворы, открывая и закрывая их в соответствии с частотой подаваемых сигналов.
Полученный модулированный сигнал с амплитудой 12 В поступает в LC-фильтр, т. е. через последовательно включенный дроссель (индуктивность) и параллельно подключенный конденсатор, что является нагрузкой. Возникающая ЭДС индукции не позволяет току возрастать мгновенно. В это же время происходит и заряд конденсатора. После закрытия электронного ключа та же ЭДС обеспечивает прежнее направление тока и не допускает резкого его снижения, помогает и разряжающийся конденсатор.
е. через последовательно включенный дроссель (индуктивность) и параллельно подключенный конденсатор, что является нагрузкой. Возникающая ЭДС индукции не позволяет току возрастать мгновенно. В это же время происходит и заряд конденсатора. После закрытия электронного ключа та же ЭДС обеспечивает прежнее направление тока и не допускает резкого его снижения, помогает и разряжающийся конденсатор.
Чтобы не вдаваться в подробности, скажу так: в конечном итоге из импульсного сигнала выделяется постоянная составляющая, и на выходе со сглаживающего LC-фильтра получаем постоянное напряжение нужного значения. Правда, выходное напряжение будет содержать некоторый уровень пульсаций относительно среднего значения.
Для минимизирования пульсаций используют несколько таких цепей, т. е. фаз питания, которые работают таким образом, что подаваемые от PWM-контроллера импульсы в каждую фазу смещены друг относительно друга. Величина этого смещения зависит от количества используемых фаз. Т. е. смещение вычисляется как отношение периода переключения MOSFET-транзисторов к количеству фаз.
смещение вычисляется как отношение периода переключения MOSFET-транзисторов к количеству фаз.
Тем самым выходной сигнал с каждого сглаживающего фильтра также смещен по отношению к другому. Также смещены будут и пульсации выходного напряжения. Результирующее напряжение будет иметь уже гораздо меньший уровень пульсаций. И это одно из преимуществ именно многофазных цепей питания – получение более стабильного уровня подаваемого на процессор напряжения.
Регулирование выходного напряжения
Современные процессоры требуют разного напряжения питания в процессе работы. Зависит это от нагрузки, и не забудем про разгон, при котором также необходимо изменять напряжение, в данном случае повышать его. Каким образом происходит автоматическая регуляция?
PWM-контроллер получает требуемое значение напряжения, считывая специальный 8-битный сигнал VID (Voltage Identifier), который может задавать до 256 уровней напряжения.
Зная требуемое значение, остается его сравнить с тем, которое подается в нагрузку. Для этого существует цепь обратной связи. Сравнение референсного напряжения и того, которое считано с нагрузки, позволяет определить, требуется ли изменить его уровень. Делается это изменением скважности PWM-импульсов. Таким образом поддерживается оптимальное напряжение питания процессора.
Для этого существует цепь обратной связи. Сравнение референсного напряжения и того, которое считано с нагрузки, позволяет определить, требуется ли изменить его уровень. Делается это изменением скважности PWM-импульсов. Таким образом поддерживается оптимальное напряжение питания процессора.
Почему нельзя обойтись одной фазой
Одну из причин я уже назвал – сглаживание пульсаций выходного напряжения. Есть и еще как минимум одна причина – мощность. Используемые MOSFET-транзисторы, конденсаторы, дроссели имеют предел по максимальному току. Если взять для примера CPU, потребляющий 65 Вт при питающем напряжении в 1 В, ток будет исчисляться несколькими десятками ампер.
Так, используемые элементы могут быть рассчитаны на ток до 30, 40 или более ампер, но, скорее всего, это все равно будет меньше максимального потребления электроэнергии процессором. При этом должна быть возможность установки другого CPU, у которого потребление может оказаться больше, например, 95 Вт.
Для того, чтобы гарантированно обеспечить запас мощности, и используют несколько фаз. Тем самым заодно снижается нагрузка на каждую из них и, соответственно, их нагрев. Это дает возможность использовать большое количество процессоров.
Тем самым заодно снижается нагрузка на каждую из них и, соответственно, их нагрев. Это дает возможность использовать большое количество процессоров.
Сколько фаз действительно необходимо? Скажем так, от 4 до 8 в зависимости от процессора и при отсутствии разгона. Этого более чем достаточно. Впрочем, большее их количество не так уж и плохо, особенно при использовании мощных «камней», да еще с разгоном. В разумных пределах, конечно.
Чем отличаются верхний и нижний транзисторы
Тут надо прояснить один момент. Нередко можно встретить разные конфигурации цепей VRM. Например, у MSI Z490-A Pro используется по одному транзистору OnSemi 4C029N в верхнем плече и 4C024N в нижнем. У первого максимальный ток равен 46 А, у нижнего – 78 А.
У Gigabyte X570 GAMING X конфигурация несколько иная – верхний транзистор один, ONSemi 4C10N (макс. ток до 40 А), а нижних сразу два, ONSemi 4C06N (макс. ток до 69 А каждый). В последнем случае используется схема 1h3L, т. е один верхний (high) транзистор и два нижних (low).
Зачем такой разброд и шатания? Здесь надо обратить внимание на условия работы этих транзисторов. У верхнего на входе 12 В, а на выходе около 1 В. При заданной мощности ток не особо велик, и составляет, предположим, несколько ампер, ну пусть даже десяток-другой в особо сложных случаях.
А что нижний транзистор? Его диапазон напряжений работы от 1 (примерно) вольта до нуля. При той же мощности токи, которые он должен выдерживать, гораздо выше. Потому и ставят более мощный силовой элемент, или даже пару.
Кстати, если посмотреть на схему силовой сборки, в которую заключены все силовые MOSFET вместе с драйвером, то элемент нижнего плеча изображается более крупным. Теперь понятно почему.
Может быть и такая ситуация, когда для цепей питания ядер процессоров используют схему 1h3L (один верхний транзистор и два нижних), а для питания SoC, графического чипа, используется более простая схема 1h2L, т. е. по одному транзистору в каждом плече.
В случае использования сборок, для ядер может использоваться одна модель силовых элементов, а для SoC другая. Например, на платы ASRock B550 Extreme4 установлены двенадцать Vishay SIC654 и пара Vishay SIC632. Хотя по максимальному току сборки одинаковые, все же сам элемент SIC632 несколько проще.
Например, на платы ASRock B550 Extreme4 установлены двенадцать Vishay SIC654 и пара Vishay SIC632. Хотя по максимальному току сборки одинаковые, все же сам элемент SIC632 несколько проще.
Встроенная графика не слишком обременительна в плане энергопотребления и до значений в десятки ампер тут дело обычно не доходит. Посему можно использовать меньшее количество элементов или более простые.
Кстати, дискретные элементы в цепях питания процессора используются в моделях материнских плат нижнего ценового диапазона. В материки среднего класса и в топовые модели ставят силовые сборки.
Всегда ли фаза действительно фаза
Маркетинг играет большую роль в нашей жизни. Смартфон с камерой на 16 мегапикселей априори считается лучше такого же, но с камерой «всего лишь» на 13 мегапикселей. Ну а если используется 23 мегапикселя – то это уже вообще круть!
Аналогично и с материнскими платами. В описаниях, спецификациях или рекламных материалах на ту или иную модель можно найти гордое упоминание о системе питания, использующей -дцать фаз. А у конкурента схожая по функционалу плата вполне может имеет -дцать и еще 4 фазы. Чтобы не ходить далеко за примером, возьмем плату ASRock X370 Taichi под новехонькие Ryzen. Если обратиться к сайту производителя, то в спецификациях видим упоминание, что используется 16-фазная система питания.
А у конкурента схожая по функционалу плата вполне может имеет -дцать и еще 4 фазы. Чтобы не ходить далеко за примером, возьмем плату ASRock X370 Taichi под новехонькие Ryzen. Если обратиться к сайту производителя, то в спецификациях видим упоминание, что используется 16-фазная система питания.
А ведь используемый PWM-контроллер IR35201 – восьмифазный. Получается, производитель платы врет? Нет, ну может, немного лукавит. Дело в том, что дросселей, конденсаторов, электронных ключей и проч. действительно 16. Тонкость в том, что используются устройства, называемые делителями (doublers).
Суть работы этих элементов следует из названия – разделить, распределить сигналы от одного канала PWM-контроллера на две цепочки «драйвер-ключ-фильтр». На выходе очень похоже на две фазы, только управляются они одним сигналом, работают синфазно, никакого смещения между ними для сглаживания пульсаций нет. Тогда зачем они?
Ответ – мощность. Данная плата гарантирует поддержку процессоров с потреблением до 300 Вт! Распределяя нагрузку по такому количеству фаз, удается снизить проходящий через каждую из них ток и, как результат, уменьшить нагрев силовых элементов. Впрочем, если используется действительно мощный CPU, да еще и с разгоном, то для охлаждения просто необходим радиатор. Лучше бы даже с обдувом.
Впрочем, если используется действительно мощный CPU, да еще и с разгоном, то для охлаждения просто необходим радиатор. Лучше бы даже с обдувом.
В итоге, на самом деле это не 16-фазная система питания, а 8-фазная по 2 канала в каждой. Кстати, используемые на упомянутой материнской плате дроссели рассчитаны на ток до 60 А.
Думаю, все сказанное хорошо проиллюстрирует следующая картинка.
Возможен вариант без использования делителей. В таком случае ставится несколько PWM-контроллеров, которые работают синхронно. Если использовать уже упомянутый восьмифазный IR35201, установив 2 таких на плату, то вполне можно получить на выходе 16 фаз. Почти честных фаз, т. к. временнОго сдвига по всем фазам не будет.
По одной фазе от каждого PWM-контроллера будет работать синхронно, т. е. получим 8 пар (при условии, что используются 2 PWM-контроллера) фаз без временного смещения управляющего сигнала. Строго говоря, сглаживание будет такое же, как и при использовании 8 фаз, но вот мощность будет существенно выше.
А ведь можно найти платы, в которых и по 24 фазы…
Заключение. Фазы питания процессора – что это
«Режим питания нарушать нельзя», говорил один мультяшный персонаж. И это питание должно быть не только качественным, но и подаваться без сбоев. Причем в переложении на компьютерный мир необходимо учитывать изменяющиеся условия, при которых не только потребление процессора изменяется при разных ситуациях, но и он сам может быть заменен более прожорливым.
Система питания CPU, содержащая n-ое количество фаз, обеспечивает надежную его работу. Кстати, все сказанное верно и для видеокарт. Электропитание GPU осуществляется аналогично. А то, что производители стараются запихнуть на свои материнские платы, особенно дорогие, побольше этих фаз… С этим придется смириться. Вряд ли есть реальная необходимость в 24-х фазах, но покупатель всегда ведь ведется на красивые слова и любит большие цифры, конечно, если только это не ценник.
Питание современных процессоров / Хабр
Обеспечение питания – одна из наиболее сложных задач при разработке современных процессоров. Сеть доставки питания (power delivery network, PDN) должна отвечать повышенным требованиям современной КМОП-технологии, обеспечивать питание с высокой эффективностью и быстро реагировать на изменения в энергопотреблении.
Сеть доставки питания (power delivery network, PDN) должна отвечать повышенным требованиям современной КМОП-технологии, обеспечивать питание с высокой эффективностью и быстро реагировать на изменения в энергопотреблении.
И эти проблемы встречаются как у смартфонов с потреблением в 1 Вт, так и у серверных процессоров на 200 Вт и массивных ускорителей машинного обучения – к примеру, Cerebras CS-1 на 15 кВт. Для работы с заданной тактовой частотой каждому транзистору и каждой схеме современного чипа требуется питание с правильным напряжением. Если напряжение будет слишком низким, элементы схемы будут переключаться медленно, что приведёт к появлению ошибок, проблемам со стабильностью и другим неожиданным отказам.
Из-за физики кремния КМОП обычно работает на напряжении в 1 В. Однако у современных технологий, использующих транзисторы FinFET и другие техники, номинальные напряжения могут находиться в диапазоне от 0,65 В до 1,2 В. Инновационные схемы могут использовать напряжение питания, близкое к пороговому значению транзисторов (near-threshold voltage, NTV) – эту технологию продемонстрировало исследование от Intel.
Однако работа под низким напряжением – это сложная задача в плане обеспечения питания, поскольку в этом случае к процессору нужно подводить большой ток. Возьмём современный серверный процессор – Intel Cascade Lake Xeon 14 нм. TDP у самых мощных процессоров этой модели достигают 205 Вт, что теоретически даёт нам ток в 205 А при напряжении в 1 В. На самом деле, конечно, процессоры устроены гораздо сложнее, и используют различные напряжения и схемы питания, однако такой простой пример будет полезен для понимания ситуации. Если энергопотребление процессора останется на том же уровне, а напряжение понизится до 0,75 В, это увеличит нужный ток до 274 А.
 И хотя передовые серверные процессоры от Intel довольно прожорливы, они не идут в сравнение с некоторыми ускорителями вычислений. К примеру Nvidia Volta V100 потребляет 450 Вт, некоторые будущие их процессоры будут есть уже по 600 Вт, и, как было упомянуто ранее, Cerebras CS-1 потребляет невероятные 15 кВт.
И хотя передовые серверные процессоры от Intel довольно прожорливы, они не идут в сравнение с некоторыми ускорителями вычислений. К примеру Nvidia Volta V100 потребляет 450 Вт, некоторые будущие их процессоры будут есть уже по 600 Вт, и, как было упомянуто ранее, Cerebras CS-1 потребляет невероятные 15 кВт.Обычно гораздо эффективнее получается передавать энергию при высоком напряжении и низком токе. Чем выше напряжение, тем меньше ток и тем меньше требуется проводов, что уменьшает стоимость системы. Кроме того, потери на сопротивление пропорциональны квадрату тока, поэтому увеличение напряжения и уменьшение тока понижает потери на сопротивление и увеличивает эффективность энергетической системы. Поэтому обычно линии электропередач работают с напряжением выше 110 кВ – и те же самые базовые принципы применимы и для сервера или дата-центра. Хотя некоторые сервера используют традиционные 12 В, некоторые из новых перешли на 48 В для эффективности – в особенности ускорители, потребляющие более 350 Вт.
Если свести всё это вместе, то теоретической целью обеспечения питания будет передача энергии по системе с максимально возможным напряжением, а потом преобразование в очень низкое и стабильное напряжение, для эффективных и стабильных вычислений.
Анатомия сети передачи питания
Как показано на рис. 1, проблема обеспечения питания затрагивает всю систему, начинаясь с основного источника питания и продолжаясь до электрораспределительной сети в процессоре, доходя в итоге до транзисторов, выполняющих вычисления на кристалле. У настольных компьютеров БП преобразует 110 В или 220 В в 12 В постоянного тока, распространяемого по всей материнской плате, к процессору и другим компонентам. У ноутбуков или смартфонов всё немного не так – типичные литий-ионные батареи выдают постоянное напряжение в 3,7 В, поэтому преобразования переменного напряжения в постоянное не происходит, а понижение напряжения требуется не такое сильное.
Рис.
У стандартных процессоров, например, от AMD, модуль регулятора напряжения (voltage regulation module, VRM) понижает напряжение примерно до 1 В. Обычно VRM располагаются недалеко от процессора, так, чтобы большую часть расстояния проходили сигналы на 12 В. 1 В передаётся на небольшое расстояние по материнской плате, через плату процессора, и внутрь самого процессора по его контактам. В процессоре есть своя электрораспределительная сеть, расходящаяся от контактов и использующая различные промежуточные металлические слои для доставки энергии к транзисторам. VRM работают на довольно низкой частоте в 1 МГц, то есть, могут подстраивать выходящее напряжение только раз в микросекунду.
Многие системы на базе Intel работают по той же схеме, однако используют дополнительный шаг в обеспечении питания. FIVR (fully-integrated voltage regulator – полностью интегрированный модуль регулятора напряжения) интегрирован в сам кристалл процессора и распределяет энергию по десяткам шин питания в его различные блоки (ядра CPU, кэши L2, блоки GPU и т.
Одно из преимуществ FIVR состоит в том, что напряжение, поданное с VRM материнской платы на процессор получается в два раза выше, чем у обычных систем. Использование более высокого напряжения уменьшает требуемую силу тока примерно в 2 раза, уменьшает количество контактов питания и повышает эффективность. Минус в том, что преобразование напряжения никогда не бывает на 100% эффективным, и FIVR теряют часть энергии.
Необходимость быстрой реакции в изменчивых условиях
Скорость FIVR подводит нас к одной из крупнейших проблем обеспечения питания современных процессоров. Концентрация на постоянном питании и температурных характеристик (TDP) преуменьшает значимость проблемы. Современные процессы чрезвычайно динамичны, а их поведение меняется на основе нагрузки. Транзистору при переключении требуется относительно небольшой ток. Однако если множество транзисторов переключаются одновременно, то общее потребление может достичь значительных величин и создать шум на питании чипа. У таких высокоскоростных чипов, как CPU или GPU, количество переключающихся транзисторов может значительно меняться от цикла к циклу.
Эту проблему могут проиллюстрировать два примера. Большинство дата-центров оптимизируют под эффективность и высокую утилизацию – то есть, 40-60% утилизации CPU, а в пиках и того больше. Если мы вернёмся к TPD 205 Вт у Intel Xeon по спецификации, то этот процессор в моменты максимальной загрузки потребляет ток в 273,75 A по основным шинам питания, и невероятные 413 Вт.
Клиентские процессоры, особенно у ноутбуков и смартфонов, ведут себя совсем не так, и представляют ещё более интересную проблему. Они обычно оптимизированы под очень неровную работу и должны выдавать максимальную мощность на кратких промежутках времени (к примеру, при загрузке веб-страницы), и потреблять очень мало во время простоя (к примеру, ожидая пользовательского ввода). Ноутбук, работающий с 40-60% утилизацией CPU, нереально быстро просаживал бы батарею. Клиентский процессор порядка 90% времени проводит в режиме ожидания. В итоге у клиентских процессоров получается ещё большая разница между TPD, максимальной мощностью и потреблением тока. Последние процессоры Ice Lake серий U и Y имеют TPD в 15 Вт и 9 Вт соответственно. Для увеличения быстродействия вендоры могут устанавливать TPD выше, вплоть до 25 Вт и 12 Вт соответственно. Однако максимальное энергопотребление для CPU и GPU значительно выше – до 70 А и 49 А соответственно, и это не считая питание контроллера памяти и всей периферии ядра.
Ноутбук, работающий с 40-60% утилизацией CPU, нереально быстро просаживал бы батарею. Клиентский процессор порядка 90% времени проводит в режиме ожидания. В итоге у клиентских процессоров получается ещё большая разница между TPD, максимальной мощностью и потреблением тока. Последние процессоры Ice Lake серий U и Y имеют TPD в 15 Вт и 9 Вт соответственно. Для увеличения быстродействия вендоры могут устанавливать TPD выше, вплоть до 25 Вт и 12 Вт соответственно. Однако максимальное энергопотребление для CPU и GPU значительно выше – до 70 А и 49 А соответственно, и это не считая питание контроллера памяти и всей периферии ядра.
Основная проблема тут в том, что регуляторы напряжения, будь то VRM на материнской плате или FIVR от Intel, реагируют гораздо медленнее, чем могут появляться кратковременные всплески, вызванные переключениями транзисторов. FIVR у Haswell может повысить напряжение на шине питания от 0 до 0,8 В за 0,32 мкс. Однако для современных процессоров на 3 ГГц это выльется в порядка 1000 тактов.
Как уже упоминалось, если процессор работает на частоте 3 ГГц, а напряжение внезапно падает, то транзисторы могут уже не работать корректно – поэтому либо нужно держать постоянное напряжение, либо ронять частоту. На практике же большинство компаний используют комбинацию из разных мер. К примеру, AMD разработала технологию адаптивного изменения частоты, уменьшающую её во время проседаний напряжения.
На практике же большинство компаний используют комбинацию из разных мер. К примеру, AMD разработала технологию адаптивного изменения частоты, уменьшающую её во время проседаний напряжения.
Плавная подача питания развязывающими конденсаторами
Чтобы устранить несоответствие между почти мгновенными всплесками потребления и задержкой на регуляторах напряжения, современные системы полагаются на развязывающие, или обходные конденсаторы. Эти конденсаторы хранят энергию и могут быстро высвобождать её, чтобы гарантировать постоянное напряжение в моменты, когда регуляторы только начинают реагировать. Вернёмся к рис. 1: системы включают в себя развязывающие конденсаторы на каждом шаге работы сети подачи питания. На МА конденсаторы встречаются во многих местах, но особенно много их вокруг гнезда процессора – см. рис. 2. В платы процессоров также встраивают развязывающие конденсаторы, обычно по краям и снизу. Наконец, на кристаллах процессора тоже располагают конденсаторы; они ближе всего расположены к активным схемам и дают скорейший отклик на временные всплески энергопотребления.
Рис. 2: развязывающие конденсаторы вокруг гнезда процессора
На кристаллах располагаются совершенно разные конденсаторы. Простейший их тип – обычный транзистор, который иногда называют МОП-конденсатором. Такие конденсаторы можно легко вставлять в стандартные ячейки на небольшом расстоянии от важных участков, где ожидается сильный шум переключения. Поскольку они располагаются близко к активным участкам, они легко могут поглощать шум и быстро подавать дополнительный ток.
Кроме того, на чипах, разработанных при помощи различных средств автоматизации, встречаются «пробелы» – участки, оставшиеся пустыми из-за несовершенства инструментов и ограничений по расположению блоков разной формы в непосредственной близости друг от друга. Распространённой практикой является заполнение этих пробелов конденсаторами – по сути, это «бесплатно». И хотя МОП-конденсаторы можно сделать в любом техпроцессе и легко разместить на кристалле, они не являются идеальными конденсаторами. Как и другие транзисторы, они дают утечку, а также их бывает сложно втиснуть в забитые компонентами участки чипа. Ещё один вариант – изменить техпроцесс и создавать более специализированные структуры, такие, как металл-диэлектрик-металл (MIM) конденсаторы, металл-оксид-металл (MOM) конденсаторы, или траншейные конденсаторы [deep trench capacitors].
Ещё один вариант – изменить техпроцесс и создавать более специализированные структуры, такие, как металл-диэлектрик-металл (MIM) конденсаторы, металл-оксид-металл (MOM) конденсаторы, или траншейные конденсаторы [deep trench capacitors].
Рис. 3: MIM- конденсаторы от Intel на 22 нм для eDRAM
Как следует из названия, MIM- конденсаторы формируется из двух параллельных металлических слоёв с high-k диэлектриком между ними. В процессе на 22 нм от Intel используются два разных вида MIM-конденсаторов. Как видно на рис. 3, первый тип MIM-конденсаторов используется для одноразрядных ячеек в eDRAM и формируется в нижних металлических слоях M2-M4. Второй представлен в процессе 22FFL и использует толстые верхние слои в 4 мкм в качестве параллельных металлических слоёв. Intel тут не делает ничего уникального – другие производители тоже используют MIM-конденсаторы. К примеру, AMD использовала MIM-конденсаторы верхнего уровня в процессоре Zen CCX для развязки и уменьшения провалов напряжения. MIM-конденсаторы обычно работают лучше, чем МОП-конденсаторы, однако располагаются они чуть дальше, поскольку нхаодятся в верхних металлических слоях, а необходимость предпринимать дополнительные шаги на производстве немного увеличивает стоимость. MOM-конденсаторы используют сходную идею параллельных металлических линий, только поворачивают их на 90°. Металлические линии формируются горизонтально в двух соседних вертикальных металлических слоях (к примеру, M3 и M4), а межслойный оксид-диэлектрик играет роль изолятора.
MIM-конденсаторы обычно работают лучше, чем МОП-конденсаторы, однако располагаются они чуть дальше, поскольку нхаодятся в верхних металлических слоях, а необходимость предпринимать дополнительные шаги на производстве немного увеличивает стоимость. MOM-конденсаторы используют сходную идею параллельных металлических линий, только поворачивают их на 90°. Металлические линии формируются горизонтально в двух соседних вертикальных металлических слоях (к примеру, M3 и M4), а межслойный оксид-диэлектрик играет роль изолятора.
Ещё одним вариантом будут траншейные конденсаторы, однако они редко встречаются в производстве, поскольку травление траншей с высоким разрешением значительно повышает стоимость процесса. Их использовали уже несколько поколений технологий изготовления процессоров, начиная с техпроцесса SOI на 32 нм от IBM и далее, с SOI на 14 нм. Траншейные конденсаторы от IBM используются для развязки в больших массивах eDRAM, реализующих кэши L2, L3 и L4 в процессорах POWER и zArch. В качестве примера IBM заявляет, что смогла убрать все конденсаторы с платы процессора z12, сделанного для мейнфрейма по техпроцессу 32 нм, и заменить их траншейными конденсаторами. После этого на IEDM 2019 TSMC рассказала о процессе формирования траншейных конденсаторов на кремниевой вставке. Хитроумный и элегантный подход – хотя такие конденсаторы располагаются уже не так близко к активной логике, как те, что находятся на самом кристалле, поэтому неспособны полностью заменить развязывающие конденсаторы.
В качестве примера IBM заявляет, что смогла убрать все конденсаторы с платы процессора z12, сделанного для мейнфрейма по техпроцессу 32 нм, и заменить их траншейными конденсаторами. После этого на IEDM 2019 TSMC рассказала о процессе формирования траншейных конденсаторов на кремниевой вставке. Хитроумный и элегантный подход – хотя такие конденсаторы располагаются уже не так близко к активной логике, как те, что находятся на самом кристалле, поэтому неспособны полностью заменить развязывающие конденсаторы.
Обеспечение системы питанием находит компромисс между быстродействием, эффективностью и стоимостью
При обеспечивании питанием высокоскоростных процессоров приходится обходить несметное количество проблем. В идеале, сеть доставки питания должна работать при высоком напряжении для эффективности передачи энергии, но в итоге выдавать низкое и стабильное напряжение для КМОП-логики, на которой реализован процессор. Преобразование питания, из переменного в постоянный ток, и из высокого в низкое напряжение должно быть максимально эффективным.
В то же время, ток, требуемый для работы процессора, постоянно меняется, реагируя на изменяющиеся условия работы – такие, как смесь инструкций или динамическое изменение напряжения. Для сглаживания этих почти мгновенных изменений и уменьшения шума в современных схемах почти на каждом уровне доставки питания, от материнской платы до кристалла процессора, используются развязывающие конденсаторы. Чем быстрее и отзывчивее сеть, тем меньше развязывающих конденсаторов ей требуется. Если взять сам процессор, то для него доступно несколько вариантов размещения конденсаторов на кристалле. Проще всего использовать обычные транзисторы, поскольку их легко разместить в рамках любого техпроцесса, однако они работают не очень эффективно. Многие производители предлагают конденсаторы улучшенной эффективности, созданные при помощи особых технологий или схем разработки — такие, как MIM-конденсаторы, и более редкие ТК, на кремнии или вставке.
Все эти переменные связаны между собой – техпроцесс, развязывающие конденсаторы, динамическое изменение напряжения и частоты, регуляторы напряжения – и разработчики процессоров обязаны учитывать их все, чтобы получать максимально возможные быстродействие, эффективность по минимальной цене.
— Почему на материнской плате разделены цепи питания для ЦП, ГП и ОЗУ?
\$\начало группы\$
Несмотря на то, что в корпусе компьютера есть блок питания, почему на материнской плате разделены цепи питания для процессора, графического процессора и оперативной памяти?
Я имею в виду, почему CPU, RAM и GPU не могут просто брать свою энергию от блока питания?
- блок питания
- память
- процессор
- материнская плата
- GPU
\$\конечная группа\$
1
\$\начало группы\$
Потому что эти микросхемы требуют лотов мощности, а это означает большой ток. Высокопроизводительный процессор может потреблять более сотни ампер при работе с полной нагрузкой! Не рекомендуется использовать токи в сотни ампер по всей вашей печатной плате, если вы когда-либо сможете этого избежать.
Но, к счастью, процессор работает при напряжении ядра всего около 1 В. Если вы передаете питание через плату при более высоком напряжении, обычно 12 В, а затем понижаете его с помощью понижающего преобразователя именно там, где это необходимо, вы можете сократить текущие требования в 10 или более раз (в идеале в 12, в этом примере, но преобразователь не идеален)! По той же причине мощность сети передается при очень высоком напряжении и понижается с помощью трансформаторов вне зданий; высокое напряжение передачи означает низкий ток передачи означает меньшие потери.
Использование локального регулирования мощности также позволяет регулировать напряжение, подаваемое на ЦП: небольшое увеличение напряжения может обеспечить более быструю работу при необходимости, а уменьшение его в режиме ожидания может снизить энергопотребление. Современные компьютеры делают все это автоматически — ноутбук, на котором я сейчас это печатаю, в настоящее время имеет напряжение процессора, которое колеблется от 0,6 В до 1,1 В* (синхронно с тактовой частотой от 900 до 4200 МГц) как более или менее мощность нужна.
Это относится и к графическим процессорам, которые также потребляют много энергии — часто больше, чем процессоры. Оперативной памяти не требуется столько энергии, но ее напряжение должно быть понижено по сравнению с напряжением системы, поэтому для нее также используется преобразователь.
*Согласно диагностическому инструменту CPU-Z.
\$\конечная группа\$
5
\$\начало группы\$
То, что вы описываете, на самом деле невозможно без дурацкой развязки.
Современный ЦП может потреблять 100 А при ступенчатом изменении нагрузки на 20 А, при постоянном напряжении 1 В и требующем +-20 мВ. Это кошмар, с которым нужно иметь дело в лучшие времена.
Не обращая внимания на то, что происходит внутри самого процессора (хотя это и половина удовольствия 🙂 ), давайте посмотрим, что происходит снаружи.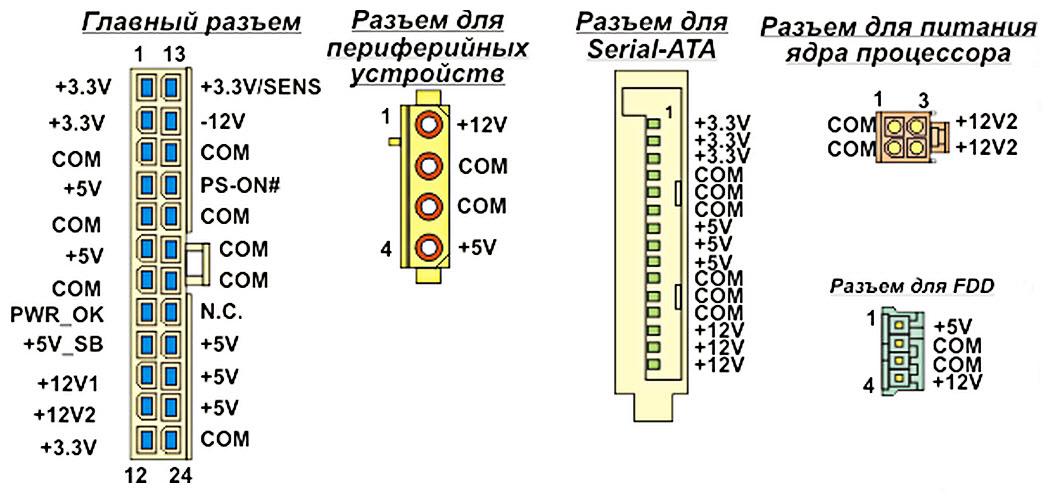
У вас обычно есть куча конденсаторов прямо вокруг ЦП в области 1 В. Их работа состоит в том, чтобы буферизовать изменения нагрузки на время, достаточное для того, чтобы местные регулирующие органы адаптировали . Однако из-за того, что эти конденсаторы настолько низковольтные, они не могут хранить много энергии — энергия, хранящаяся в конденсаторе, составляет ½CV², а напряжение мало, поэтому мы находимся на неправильном конце квадратичного уравнения. Кроме того, процессор относительно чувствителен к скачкам напряжения, так что мы также не можем сильно разряжать конденсаторы. Таким образом, множество конденсаторов здесь по-прежнему обеспечивают лишь скромное накопление энергии.
Затем вы попадаете на слой местных регуляторов, настроенных на быстрый ответ . Они сами обеспечивают определенное количество энергии, но в основном они просто передают изменения нагрузки на следующий уровень как можно скорее.
Потом на плате есть куча фильтров питания 12В. Каждый конденсатор здесь в 144 раза эффективнее конденсатора в области 1 В! (Более того, потому что мы можем просто спроектировать наши регуляторы так, чтобы они справлялись с большим спадом на входе и могли опустить шину питания ниже.) И все же вам все еще требуется изрядная сумма для покрытия, пока источник питания не сможет среагировать.
Каждый конденсатор здесь в 144 раза эффективнее конденсатора в области 1 В! (Более того, потому что мы можем просто спроектировать наши регуляторы так, чтобы они справлялись с большим спадом на входе и могли опустить шину питания ниже.) И все же вам все еще требуется изрядная сумма для покрытия, пока источник питания не сможет среагировать.
Итак, все сказано:
- Система находится в равновесии при 80А. ЦП
- ступенчато меняет ток с 80 А на 100 А, как раз в тот момент, когда напряжение сети находится на нулевом пересечении.
- Развязывающие конденсаторы вокруг ЦП начинают падать под нагрузкой (80 А на входе; 100 А на выходе)
- Местные регуляторы начинают реагировать на дополнительную нагрузку. Вероятно, с небольшим превышением.
- Развязывающие конденсаторы начинают восстанавливаться после падения напряжения, но 12В фильтрация платы начинает свисать в свою очередь.
- Провода датчиков источника питания обнаруживают, что выходное напряжение падает, и начинают увеличивать выходное напряжение источника питания 12 В.

- Питание платы 12 В начинает восстанавливаться, но входная шина постоянного тока внутреннего источника питания, в свою очередь, начинает падать.
- Вход источника питания. Рельс постоянного тока начинает проседать.
- В следующем цикле преобразование переменного тока в постоянный увеличивает нагрузку.
- Я мог бы продолжать лезть в розетку, но давайте остановимся здесь.
Теперь давайте предположим, что вместо этого я просто попытался напрямую запустить шину 1,0 В от блока питания к процессору. Сколько развязки мне нужно? Что ж, мне нужно достаточно, чтобы покрыть все время от ступенчатого изменения процессора до того, как блок питания сможет реагировать. …все на 1,0 В… …и все с возможностью потреблять только 20 мВ от конденсаторов.
Итак, в первом приближении берем всю фильтрацию 12В на материнской плате и умножаем на 144х, и еще немного, потому что ее тоже нужно лучше регулировать. И попытайтесь втиснуть это на материнскую плату, не отходя слишком далеко от процессора. И постарайтесь сделать его конкурентоспособным по стоимости с текущим дизайном. Веселиться!
И постарайтесь сделать его конкурентоспособным по стоимости с текущим дизайном. Веселиться!
Ох, и GPU хуже.
\$\конечная группа\$
6
\$\начало группы\$
Короткий ответ заключается в том, что контакты 24-контактного разъема блока питания ATX не рассчитаны на обеспечение достаточной мощности современных высокопроизводительных процессоров.
Поскольку они, вероятно, хотят сохранить обратную совместимость с другими платами ATX, они не могут просто заменить 24-контактный разъем. Поэтому решение состоит в том, чтобы добавить дополнительные разъемы. Дополнительные 8-контактные разъемы питания ЦП имеют три контакта 12 В, что дает дополнительные 24 А на разъем. Вы часто будете видеть, что высокопроизводительные процессоры будут иметь несколько таких 8-контактных разъемов.
ПОДРОБНОСТИ
24-контактный разъем ATX является эквивалентом Molex 39-28-1243. Он имеет три контакта на 12 В, и эти контакты рассчитаны только на 8 А каждый (см. спецификацию разъема на стр. 8). Таким образом, основной разъем может подавать не более 24 А при 12 В = 288 Вт.
Он имеет три контакта на 12 В, и эти контакты рассчитаны только на 8 А каждый (см. спецификацию разъема на стр. 8). Таким образом, основной разъем может подавать не более 24 А при 12 В = 288 Вт.
Как указал Харт, ЦП и ГП потребляют много энергии (потенциально сотни ампер при низком напряжении).
Высокопроизводительный процессор, такой как Intel i9-13900K, периодически потребляет до 253 Вт. Учитывая, что преобразователи постоянного тока, которые преобразуют 12 В в напряжение ядра процессора, имеют потери эффективности, наличие источника 288 Вт в лучшем случае является предельным. Кроме того, могут быть и другие устройства, которые также требуют 12 В. По обеим этим причинам необходимы дополнительные контакты разъема 12 В.
Что касается другой части вашего вопроса,
Я имею в виду, почему CPU, RAM и GPU не могут просто взять свою энергию из блок питания?
Процессор, оперативная память и графический процессор питаются от источника питания. В обычном настольном компьютере, если вы посмотрите на кабели, все они должны быть подключены к блоку питания ATX на одном конце.
В обычном настольном компьютере, если вы посмотрите на кабели, все они должны быть подключены к блоку питания ATX на одном конце.
\$\конечная группа\$
\$\начало группы\$
Чтобы добавить к существующему ответу, процессоры и графические процессоры будут масштабировать свою частоту с нагрузкой, и увеличение частоты потребует дополнительного напряжения питания, чтобы оставаться стабильным. Поскольку нагрузки ЦП и ГП плохо связаны, эти частоты, напряжения и источники питания, обеспечивающие напряжение, должны быть независимыми.
Что касается зависимости частоты от напряжения:
- Задержка распространения логического элемента КМОП уменьшается с увеличением напряжения (https://web.mit.edu/6.012/www/SP07-L13.pdf стр. 4- 5), достижимая частота процессора будет обратно пропорциональна задержкам вентилей.
- Современное компьютерное оборудование реализует динамическое масштабирование частоты (https://en.
 wikipedia.org/wiki/Dynamic_frequency_scaling) для снижения энергопотребления.
wikipedia.org/wiki/Dynamic_frequency_scaling) для снижения энергопотребления.
\$\конечная группа\$
3
\$\начало группы\$
Я добавлю еще один сценарий: когда компьютер находится в режиме ожидания с низким энергопотреблением или в спящем режиме .
Энергетическое законодательство требует, чтобы компьютеры могли переходить в режим сна с низким энергопотреблением (Energy Star, EPEAT, экодизайн ЕС). Пользователи ноутбуков хотят иметь возможность быстро перевести свой компьютер в спящий режим и возобновить работу, не потребляя при этом чрезмерного количества энергии аккумулятора.
Для этого требуется, чтобы большинство устройств было выключено, а некоторые устройства оставались включенными. Как правило, ЦП выключается, а ОЗУ переходит в режим пониженного энергопотребления для сохранения содержимого памяти. Кроме того, USB и сетевые карты остаются в режиме пониженного энергопотребления, чтобы разбудить компьютер.
Кроме того, USB и сетевые карты остаются в режиме пониженного энергопотребления, чтобы разбудить компьютер.
Возможно дальнейшее снижение мощности. Современные ПК используют состояние мягкого выключения, при котором будильник реального времени или сетевая карта могут запустить компьютер, но оперативная память отключена. Другой сценарий — переключаемая графика, когда ноутбук отключает свой графический процессор при питании от батареи.
Эти комбинации состояний низкого энергопотребления требуют разделения шин питания. В настольных блоках питания отдельный резервный блок питания оптимизирован для работы с малым током и не требует для работы вентилятора блока питания.
\$\конечная группа\$
\$\начало группы\$
Можно добавить к существующим ответам, материнская плата с питанием 12 В – очень устаревшее решение, которое используется, потому что трудно изменить наследие отрасли.
В FAANG компании провели НИОКР по энергосбережению в своих облаках, и пришли к использованию 35В от блока питания к материнской плате, и заявляя на несколько десятков процентов лучшую энергоэффективность, чем по широко используемой в настоящее время “классической” схеме (это легко – в 3 раза больше напряжение, значит в 3 раза меньше ток при той же мощности, а медь сейчас дорогая). Конечно, это специально разработанные материнские платы, не стоит пытаться кормить с полки нестандартным напряжением.
И 35В очень умеренное усиление. – В воздушном пространстве широко используется переменный ток 127В 400Гц для питания электроники, поэтому экономия еще значительнее.
Электромобилей уже произведено гораздо больше – для них характерно использование 500-1500В для большинства потребляющих устройств, но для столь высоких напряжений нужна гораздо более сильная изоляция и значительные меры предосторожности при производстве и обслуживании (медиасистемы и т.п., обычно питаемые от отдельной сети, 12 В / 24 В / 48 В, а некоторые производители газовых автомобилей, такие как Jeep, предлагают дополнительный генератор, вместо обычного генератора ~ 1,8 кВт установите около 3 кВт).
\$\конечная группа\$
2
Зарегистрируйтесь или войдите в систему
Зарегистрируйтесь с помощью Google
Зарегистрироваться через Facebook
Зарегистрируйтесь, используя электронную почту и пароль
Опубликовать как гость
Электронная почта
Требуется, но никогда не отображается
Опубликовать как гость
Электронная почта
Требуется, но не отображается
Нажимая «Опубликовать свой ответ», вы соглашаетесь с нашими условиями обслуживания, политикой конфиденциальности и политикой использования файлов cookie
.
микроконтроллер – Короткое замыкание внутри ЦП во время работы
спросил
Изменено 1 год, 7 месяцев назад
Просмотрено 3к раз
\$\начало группы\$
Я получил две платы от одного из наших клиентов с одинаковым дефектом. Это короткое замыкание между V CC и заземление. Я смог проследить это короткое замыкание до микроконтроллера (который представляет собой LPC1114 от NXP) с помощью тепловизионной камеры. Эти платы некоторое время работали у заказчика, пока не произошло короткое замыкание.
На рисунках ниже вы можете увидеть два разных микроконтроллера. Один все еще припаян к печатной плате, а другой снят с печатной платы и поставляется с V CC /GND.
Edit1: На обоих изображениях Pin1 ЦП находится в верхнем правом углу (вид MCU СВЕРХУ).
У меня к вам вопросы:
- Кто-нибудь сталкивался с таким внутренним MCU коротким?
- Что может быть причиной такого внутреннего короткого замыкания MCU? (Догадка принята 🙂
- Возможно ли такое короткое замыкание при слишком высоких температурах?
Edit2: Распиновка MCU
- микроконтроллер
- короткое замыкание
\$\конечная группа\$
6
\$\начало группы\$
Типичной причиной может быть некоторый электрический переходный процесс извне, связанный с выводом ввода-вывода, который вызывает защелкивание и разрушение источника питания. Правильная конструкция защитной схемы, как правило, предотвращает это в ситуациях, за исключением близлежащего удара молнии.
Перепады напряжения также могут быть причиной этого, может быть достаточно всего нескольких вольт, но обычно этого не происходит.
Кратковременное изменение напряжения питания также может быть причиной.
\$\конечная группа\$
3
\$\начало группы\$
Я согласен с другими ответами в том, что вероятной причиной является внешнее перенапряжение на контакте ввода-вывода, хотя возможной причиной также является внешнее перенапряжение на контакте V DD .
Чтобы исправить схему, было бы полезно знать, какой контакт ввода-вывода получил переходный процесс. Иногда это можно определить путем измерения внутренних защитных диодов микросхемы в режиме диодов мультиметра:
- Измерьте с помощью черного провода на контакте V DD и красного провода на каждом контакте ввода/вывода. Обратите внимание на показания.

- Измерьте с помощью красного провода на контакте GND и черного провода на каждом контакте ввода/вывода. Обратите внимание на показания.
Для полностью функциональной микросхемы ожидаемые значения составляют 0,6 В на каждом контакте. Часто поврежденный контакт ввода/вывода показывает либо бесконечное, либо нулевое прямое напряжение диода, так как защитный диод сгорел до того, как были повреждены другие части микросхемы.
\$\конечная группа\$
\$\начало группы\$
Насколько мне известно, да, он принадлежит переходнику извне. Вывод ввода-вывода или V DD с небольшим переходным током и высокой нагрузкой на вывод ввода-вывода приведет к короткому замыканию ЦП.
- В лучшем случае иногда это внутренний диод или (по умолчанию) защелкивающийся контакт на выходе, вызывающий короткое замыкание.
- Он может оставаться закороченным в течение неопределенного времени, пока диод или полевой МОП-транзистор полностью не сгорит (в зависимости от его максимального рабочего тока).
- Если источник питания, к которому подключена плата, является линейным источником напряжения или SMPS с маломощными насосами тока (низкочастотный импульсный SMPS или неисправный коммутирующий конденсатор или и то, и другое), эффект фиксированных контактов ввода-вывода может распространиться на Внутренности ЦП и никогда не восстанавливаются.
- Если ЦП имеет низкое потребление тока даже в случае короткого замыкания, это может быть внешний компонент, подключенный к контакту прерывания , который останавливает ЦП от запуска в состоянии неопределенного цикла
- Может быть несколько других временных условий V DD , которые нужно исследовать.
Вот еще несколько идей:
- Попробуйте использовать прецизионный источник напряжения/тока для последовательности питания и проверьте осциллографом возможные защелки контактов во время загрузки
- Попробуйте определить контакты ввода-вывода, которые могут быть открытыми коллекторами, и примите меры.
