
Пошаговые инструкции и схемы по созданию роботов своими руками:
В данном разделе сайта вы найдете подробные инструкции по сборке роботов своими руками в мастерской или даже у себя дома. Увидите фото и видеоинструкции,помогающие в домашних условиях собственноручно создать различные модели роботов. Прилагаются простые и понятные обывателю схемы и чертежи, для того чтобы самостоятельно осваивать это увлекательное и полезное занятие. Благодаря нашим фото и видео урокам вы научитесь проектировать и конструировать разнообразные модели робототехники,в том числе управляемых роботов и прочее. Все это в разделе с пошаговыми инструкциями по проектированию и сборке роботов своими руками.
library_books Подборки: DIY: Подводный дрон с видеокамерой своими руками. Пошаговая инструкцияВ этой инструкции показано как сделать подводный дрон из пвх труб с управлением с помощью пульта и с видеокамерой на борту.
Доступно только зарегистрированным пользователям
DIY: Настоящий робот дроид BB-8 под Arduino. Пошаговая инструкция по созданиюВозможно ли построить дроида ВВ8 в домашних условиях из подручных материалов? Воспользуйтесь нашей пошаговой инструкцией, чтобы создать звездного робота своими руками. В данной инструкции мы покажем вам как построить своими руками известного дроида ВВ-8 ростом в натуральную величину, под управлением arduino и смартфона…
schedule 13.01.2017 favorite_borderДоступно только зарегистрированным пользователям
schedule 05.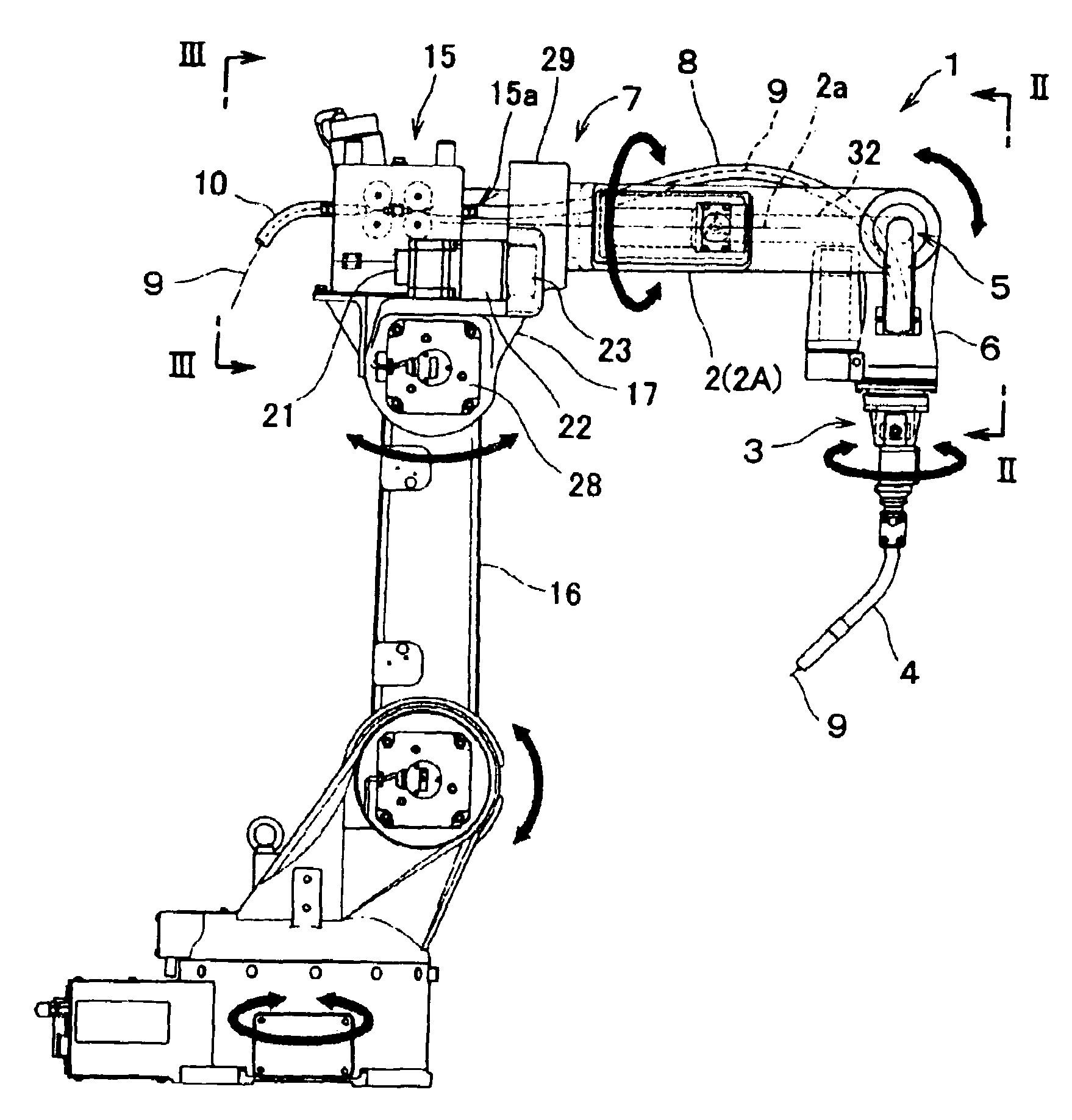 01.2017 favorite_border
01.2017 favorite_borderДоступно только зарегистрированным пользователям
schedule 27.10.2016 favorite_borderДоступно только зарегистрированным пользователям
DIY: Подталкиватель мышки на LEGO Mindstorms. Пошаговая инструкция по изготовлениюВ данной инструкции мы хотим поделиться с вами навыками построения робота на основе комплекта Mindstorm, который двигает вашу компьютерную мышь. Вам наверняка интересно узнать, зачем нужно использовать такую дорогую вещь для такой простой задачи? Цель этого робота – уберечь ваш компьютер в спящем режиме без изменения настроек. Да, кажется, это совершенно бесполезный предмет, но это весело, убедитесь сами…
Доступно только зарегистрированным пользователям
DIY: Несложный робот пылесос под Arduino своими руками. Пошаговая инструкция по изготовлению
Пошаговая инструкция по изготовлениюПопулярность автоматизированных домашних уборщиков с каждым днем возрастает. Не исключение, роботы-пылесосы для сухой уборки, способные поддерживать чистоту пола без вашего вмешательства. Если вы хотите узнать, как он устроен и построить его собственными руками, представляем вашему вниманию инструкцию по сборке простейшего робота-пылесоса из подручных средств…
schedule 20.08.2014 favorite_borderДоступно только зарегистрированным пользователям
DIY: Коробочка самовыключатель под управлением Arduino. Пошаговая инструкция по созданиюЭто руководство – как построить еще один бесполезный робот, который предназначен скорее для развлечения, чем для решения логических задач. Игрушка в виде коробочки с тумблером и открывающейся створкой, заключает в себе ряд механических элементов и блок управления на основе Arduino. Для удобства представляем вам 9 шагов для более детального подхода к сборке. Что из этого получиться увидим, когда соберем эту игрушку у себя дома…
Для удобства представляем вам 9 шагов для более детального подхода к сборке. Что из этого получиться увидим, когда соберем эту игрушку у себя дома…
Доступно только зарегистрированным пользователям
В данной инструкции мы расскажем вам, как можно построить самостоятельно роботизированную руку с комплектом Lego Mindstorms NXT. На самом деле, в этой инструкции автор хотел сделать штатив для своей камеры. Но это оказалось трудным заданием. После нескольких экспериментов автору удалось сделать простую роботизированную руку…
schedule 21.01.2014 favorite_borderДоступно только зарегистрированным пользователям
DIY: Простой робот паук на Arduino и Fischertechnik.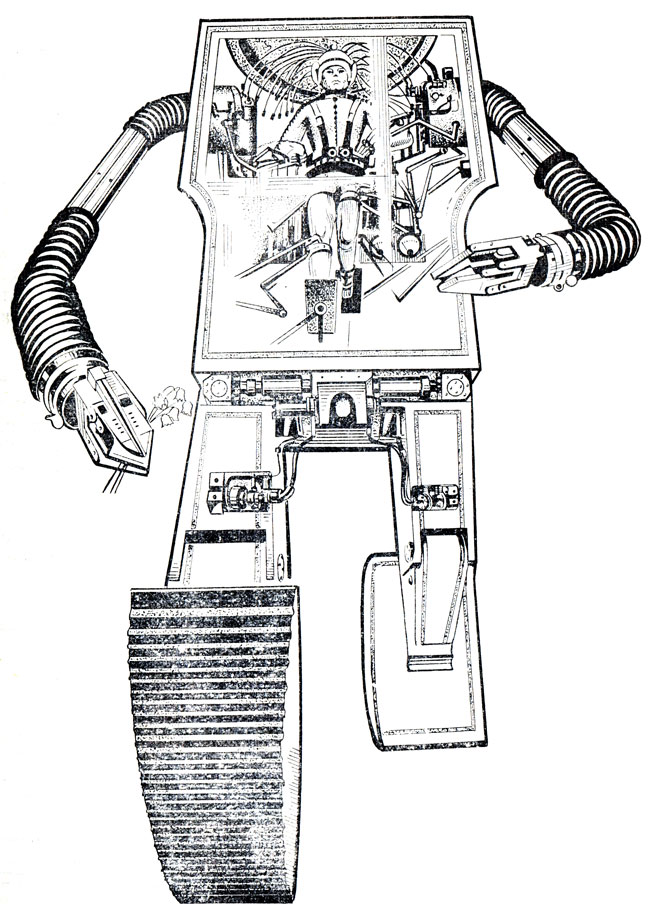 Пошаговая инструкция по созданию
Пошаговая инструкция по созданиюЕсли вам нужен проект, который будет использовать все свои сервоприводы и механизмы движения, вы можете создать простого робота-паука. Если у вас есть навыки работы с техникой Fischertechnik, LEGO и K’NEX и лишние сервоприводы, этот проект для Вас. Действительно, этот паук с нелепыми движениями является большой обучающей платформой. Основной целью этого проекта является обучение основам работы сервоприводов, их синхронизации, программированию и пониманию диапазона и силы. Результат будет очень забавным…
schedule 09.12.2013 favorite_borderДоступно только зарегистрированным пользователям
DIY: Sneel — плавающий робот-змея под Arduino. Пошаговая инструкция по созданиюSneel является роботом-змеей, который построенный для изучения живых, извилистых движений роботов в водной среде. Он предназначен для перемещения в неизвестной территории и экстремальной местности.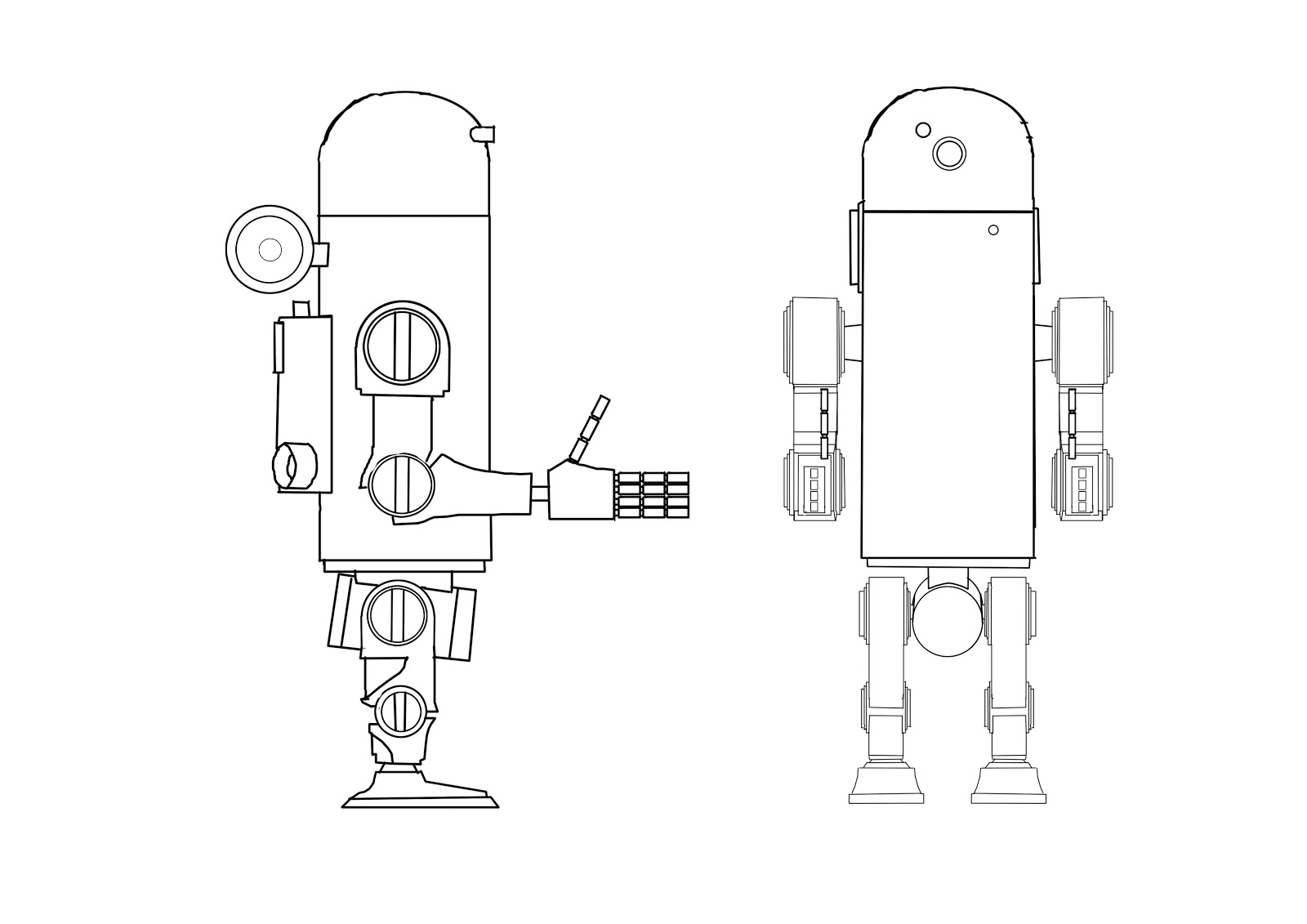
Доступно только зарегистрированным пользователям
schedule 29.05.2013 favorite_borderДоступно только зарегистрированным пользователям
DIY: Гигантский картонный робот-манипулятор. Пошаговая инструкция по созданиюПредставляем вам картонного огромного робота, контролируемого компьютером, рука которого достигает 6 футов. Он состоит из двух конфигураций: 1) рука с захватом – трехпалый захват, который позволяет подбирать игрушки и грязные носки с пола без необходимости нагибаться.
Доступно только зарегистрированным пользователям
Раздел посвящен схемам создания и изготовления роботов своими руками. Все описано подробно, шаг за шагом, весь процесс создания робота или беспилотника. Хотели бы Вы знать, как сделать квадрокоптер своими руками? У нас вы найдете фото и видео инструкции по этому процессу с подробным описанием каждого шага. Каждый пользователь, приложив достаточно усилий и терпения, с нашей помощью сможет создать проект по сборке беспилотника (дрона), своими руками собрать его из подручных материалов, и запрограммировать его.
Могли бы вы еще недавно себе представить, что сделать робота у себя дома самому будет в принципе возможно? И что это окажется так доступно и просто описано, что процесс сборки будет чем-то увлекательным и веселым? Сегодня мы докажем вам, что это просто. Все подробные инструкции, фото и видео материалы для создания квадрокоптеров / дронов / беспилотников и роботов вы найдете в разделе нашего сайта «Сделай сам».
Как работает роботизированная коробка передач — ДРАЙВ
Чтобы ответить на этот вопрос, придётся вспомнить устройство обычной механической коробки передач. Основу классической «механики» составляют два вала — первичный (ведущий) и вторичный (ведомый). На первичный вал через механизм сцепления передаётся крутящий момент от двигателя. Со вторичного вала преобразованный момент идёт на ведущие колёса. И на первичный, и на вторичный валы посажены шестерни, попарно находящиеся в зацеплении.
Перед включением передачи водитель выжимает сцепление, отсоединяя первичный вал от двигателя. Затем рычагом КПП через систему тяг на вторичном валу перемещаются специальные устройства — синхронизаторы. При подведении муфта синхронизатора жёстко блокирует на валу вторичную шестерню нужной передачи. После включения сцепления крутящий момент с заданным коэффициентом начинает передаваться на вторичный вал, а от него — на главную передачу и колёса. Для сокращения общей длины коробки вторичный вал часто делят на два, распределяя ведомые шестерни между ними.
Упрощённая схема работы 5-ступенчатой механической коробки передач.
Принцип действия роботизированных коробок передач абсолютно тот же. Единственное отличие в том, что смыканием/размыканием сцепления и выбором передач в «роботе» занимаются сервоприводы — актуаторы.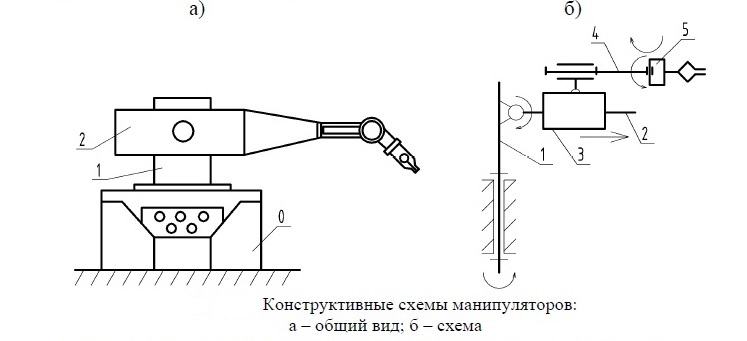 Чаще всего это шаговый электромотор с редуктором и исполнительным механизмом. Но встречаются и гидравлические актуаторы.
Чаще всего это шаговый электромотор с редуктором и исполнительным механизмом. Но встречаются и гидравлические актуаторы.
Роботизированная КПП SensoDrive применяется на автомобилях марки Citroen.
Управляет актуаторами электронный блок. По команде на переключение первый сервопривод выжимает сцепление, второй перемещает синхронизаторы, включая нужную передачу. Затем первый плавно отпускает сцепление. Таким образом, педаль сцепления в салоне больше не нужна — при поступлении команды электроника всё сделает сама. В автоматическом режиме команда на смену передачи поступает от компьютера, учитывающего скорость движения, обороты двигателя, данные ESP, ABS и других систем. А в ручном — приказ на переключение отдаёт водитель при помощи селектора КПП или подрулевых лепестков.
Фирма Ricardo на примере «робота» Easytronic от модели Opel Corsa предложила заменить раздельные актуаторы для сцепления и выбора передачи одиночным электромагнитным актуатором. Благодаря этому уменьшились размеры и масса агрегата. И самое главное — механизм выбора передачи стал работать в восемь раз быстрее, а общий период разрыва потока мощности сократился до 0,35 с. Вверху — серийный Easytronic, внизу — рисунок разработки Ricardo.
Благодаря этому уменьшились размеры и масса агрегата. И самое главное — механизм выбора передачи стал работать в восемь раз быстрее, а общий период разрыва потока мощности сократился до 0,35 с. Вверху — серийный Easytronic, внизу — рисунок разработки Ricardo.
Проблема «робота» — отсутствие обратной связи по сцеплению. Человек чувствует момент смыкания дисков и может переключить скорость быстро и плавно. А электроника вынуждена перестраховываться: чтобы избежать рывков и сохранить сцепление, «робот» надолго разрывает поток мощности от двигателя к колёсам во время переключения. Получаются дискомфортные провалы на разгоне. Единственный способ достичь комфорта при переключениях — сократить их время. А это, увы, означает рост цены всей конструкции.
Пионером массового использования преселективных коробок стал концерн Volkswagen, использующий DSG (S tronic у Audi) как на переднеприводных, так и на полноприводных моделях с продольно и поперечно установленными двигателями.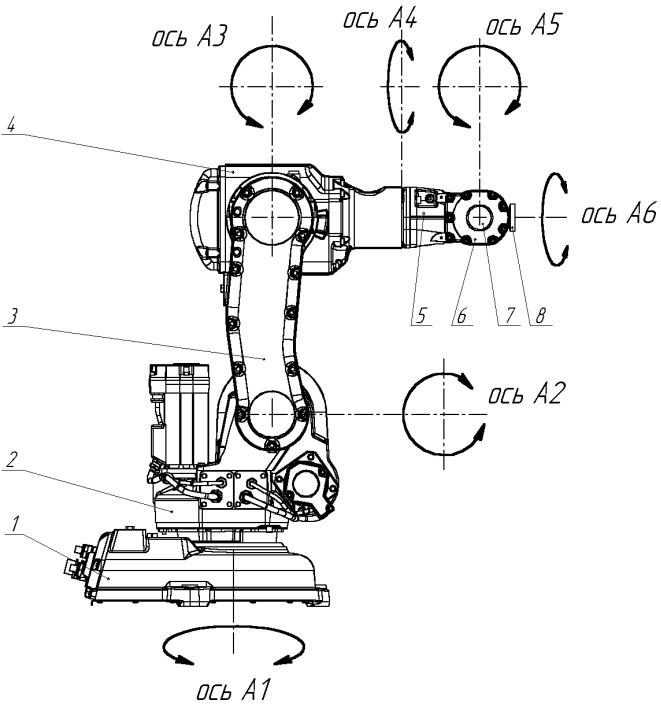 Аббревиатура DSG (Direct Shift Gearbox — коробка прямого включения) стала нарицательным для коробок с двумя сцеплениями — хотя на самом деле это просто товарный знак.
Аббревиатура DSG (Direct Shift Gearbox — коробка прямого включения) стала нарицательным для коробок с двумя сцеплениями — хотя на самом деле это просто товарный знак.
Революционным решением стала появившаяся в начале 80-х трансмиссия с двумя сцеплениями DCT (dual clutch transmission). Рассмотрим её работу на примере 6-ступенчатой коробки DSG концерна Volkswagen. У коробки два вторичных вала с расположенными на них ведомыми шестернями и синхронизаторами — как у шестиступенчатой «механики» Гольфа. Фокус в том, что первичных валов тоже два: они вставлены друг в друга по принципу матрёшки. Каждый из валов соединяется с двигателем через отдельное многодисковое сцепление. На внешнем первичном валу закреплены шестерни второй, четвёртой и шестой передач, на внутреннем — первой, третьей, пятой и заднего хода. Допустим, автомобиль начинает разгон с места. Включается первая передача (муфта блокирует ведомую шестерню первой передачи). Замыкается первое сцепление, и крутящий момент через внутренний первичный вал передаётся на колёса.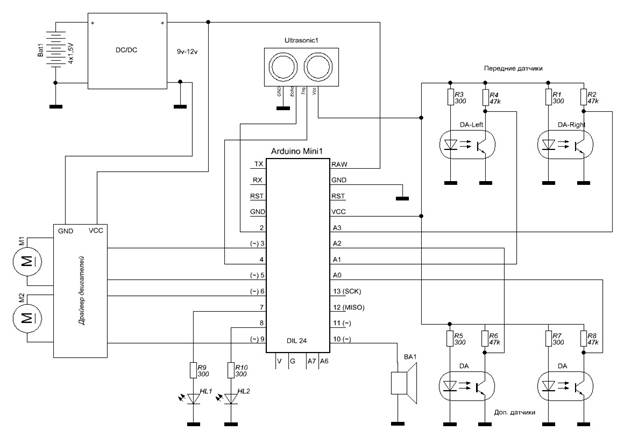 Поехали! Но одновременно с включением первой передачи умная электроника прогнозирует последующее включение второй — и блокирует её вторичную шестерню. Именно поэтому такие коробки ещё называют преселективными. Таким образом, включены две передачи сразу, но заклинивания не происходит, — ведущая шестерня второй передачи находится на внешнем валу, сцепление которого пока разомкнуто.
Поехали! Но одновременно с включением первой передачи умная электроника прогнозирует последующее включение второй — и блокирует её вторичную шестерню. Именно поэтому такие коробки ещё называют преселективными. Таким образом, включены две передачи сразу, но заклинивания не происходит, — ведущая шестерня второй передачи находится на внешнем валу, сцепление которого пока разомкнуто.
Состояние DSG при движении на первой передаче. Муфтами блокированы шестерни 1-й и 2-й передач.
Когда машина достаточно разгонится и компьютер решит повысить передачу, размыкается первое сцепление и одновременно замыкается второе. Крутящий момент теперь идёт через внешний первичный вал и пару второй передачи. На внутреннем валу уже выбрана третья. При замедлении те же операции происходят в обратном порядке. Переход происходит практически без разрыва потока мощности и с фантастической скоростью. Серийная коробка Гольфа переключается за восемь миллисекунд. Сравните со 150 мс на Ferrari Enzo!
Состояние DSG после переключения на 2-ю передачу. 3-я передача ожидает своей очереди.
3-я передача ожидает своей очереди.
Коробки с двойным сцеплением экономичнее и быстрее традиционных механических, а также более комфортны, чем «автоматы». Главный их недостаток — высокая цена. Вторую проблему — неспособность передавать большой крутящий момент — решили с появлением DSG фирмы Ricardo на 1000-сильном купе Bugatti Veyron. Но пока удел большинства суперкаров — «роботы». Хотя, например, коробка Ferrari 599 GTB Fiorano — не чета опелевскому Изитронику: время переключения у суперробота исчисляется десятками миллисекунд.
Роботизированная коробка AMG Speedshift, устанавливаемая на новейший SL 63 AMG, представляет собой модифицированный мерседесовский «автомат» 7G-Tronic. Только крутящий момент вместо тяжёлого и инертного гидротрансформатора передаёт одинарное многодисковое «мокрое» сцепление. Благодаря применению сложных электрогидравлических актуаторов время переключения составляет 0,1 с.
Сегодня коробки DCT есть не только у Фольксвагена, но и у компаний BMW, Ford, Mitsubishi и FIAT.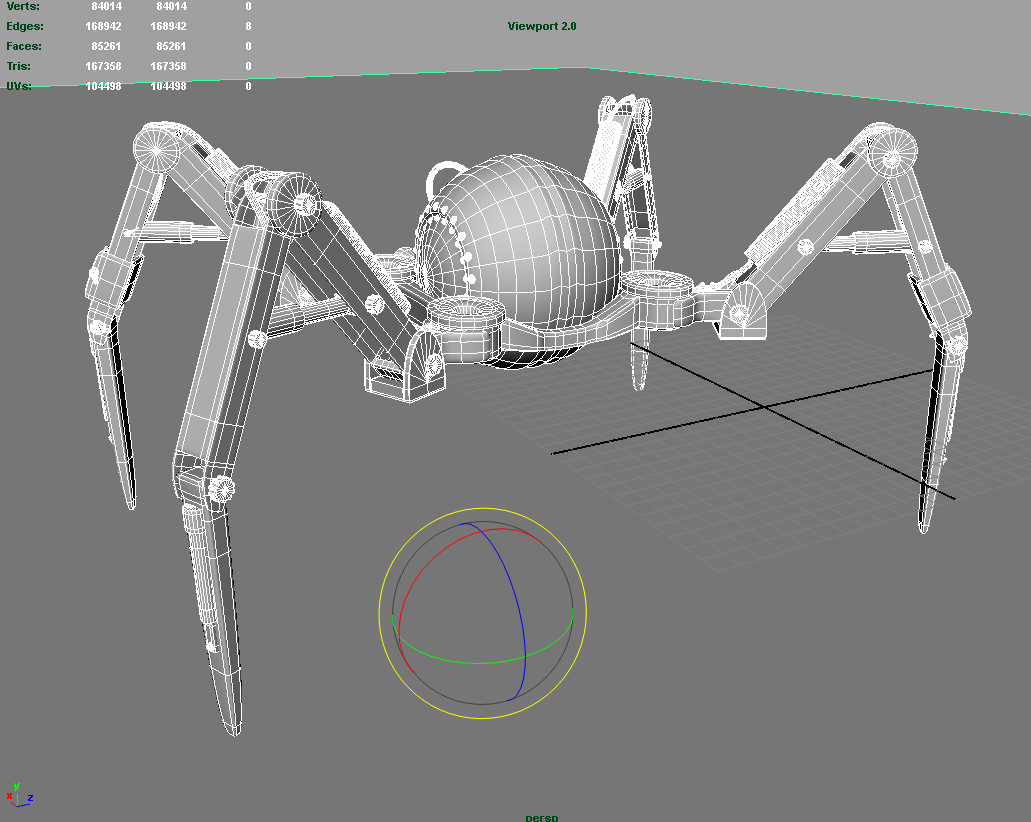 Преселективные коробки признали даже инженеры Porsche, которые используют в своих машинах только проверенные технологии. Аналитики прогнозируют, что в будущем наиболее распространёнными трансмиссиями станут DCT и вариаторы. А дни третьей педали, похоже, сочтены — скоро она исчезнет даже из самых драйверских спорткаров. Человечество выбирает то, что удобнее.
Преселективные коробки признали даже инженеры Porsche, которые используют в своих машинах только проверенные технологии. Аналитики прогнозируют, что в будущем наиболее распространёнными трансмиссиями станут DCT и вариаторы. А дни третьей педали, похоже, сочтены — скоро она исчезнет даже из самых драйверских спорткаров. Человечество выбирает то, что удобнее.
Как построить робота – конструкция и схема
Добавлено 24 января 2018 в 05:51
Сохранить или поделиться
Как построить робота (от Travis Fagerness)
Начнем собирать робота, который будет следовать за линиями или стенами и избегать препятствий!
Обзор
Это первая часть в серии статей о моем опыте создания робота, который может делать разные вещи. Я думал, что было бы замечательно создать робота, которого легко было бы собрать лишь с одним паяльником, и комплектующие к нему были бы доступны. Я составил следующий список требований к этому роботу:
- Многие наборы стоят дорого, поэтому он должен быть относительно недорог.

- Он должен быть простым в сборке, не требуя специального оборудования.
- Он должен быть простым в программировании, не требуя сложных IDE и программатора.
- Он должен быть мощным для расширяемости.
- Он должен запускаться от простого источника питания.
- Он должен быть способен следовать за линией или за стеной и избегать препятствий.
В этой статье я расскажу, как я решил выполнить эти требования.
Выбор компонентов
Первый шаг в любом проекте – выяснить, какие необходимы комплектующие. Чтобы быть полезным, роботу нужно несколько ключевых вещей: способ двигаться, думать и взаимодействовать с окружением. Чтобы снизить стоимость, мне нужно обойтись двумя колесами. Этот означает, что мне нужно управлять двумя отдельными двигателями, которые могут работать независимо друг от друга. Мне также нужна шаровая опора, на которую робот может опираться, чтобы скользить. У этого решения есть недостаток: робот не может перемещаться ни по каким поверхностям, кроме гладких полов. Я хочу, чтобы мозги были построены на базе какой-либо известной микроконтроллерной платформы. Так ему не понадобится программатор или руководство по использованию средств разработки. У робота должны быть датчики, которые позволяют ему знать о линиях, стенах и препятствиях. Я также хочу свести к минимуму количество разных мест для покупок, чтобы снизить итоговую стоимость доставки. Наконец, компоненты должны быть небольшими, потому что я хочу спроектировать плату для недорогого производства и оставаться в пределах бесплатной версии Eagle CAD.
Я хочу, чтобы мозги были построены на базе какой-либо известной микроконтроллерной платформы. Так ему не понадобится программатор или руководство по использованию средств разработки. У робота должны быть датчики, которые позволяют ему знать о линиях, стенах и препятствиях. Я также хочу свести к минимуму количество разных мест для покупок, чтобы снизить итоговую стоимость доставки. Наконец, компоненты должны быть небольшими, потому что я хочу спроектировать плату для недорогого производства и оставаться в пределах бесплатной версии Eagle CAD.
Механика: двигатели, шестеренки, колеса
Я нашел пару веб-сайтов, которые предлагают различные двигатели и компоненты для роботов, но я остановился на Polulu из-за их цен и наличия всего необходимого. Продукты Tamiya выглядели неплохо. Комплект 70168 Double Gearbox Kit поставляется с шестеренками, двигателями и валами, что значительно упрощает механику. И он очень дешев! В нормальном режиме двигатели работают от 3В, но могут работать и от большего напряжения за счет сокращения срока службы.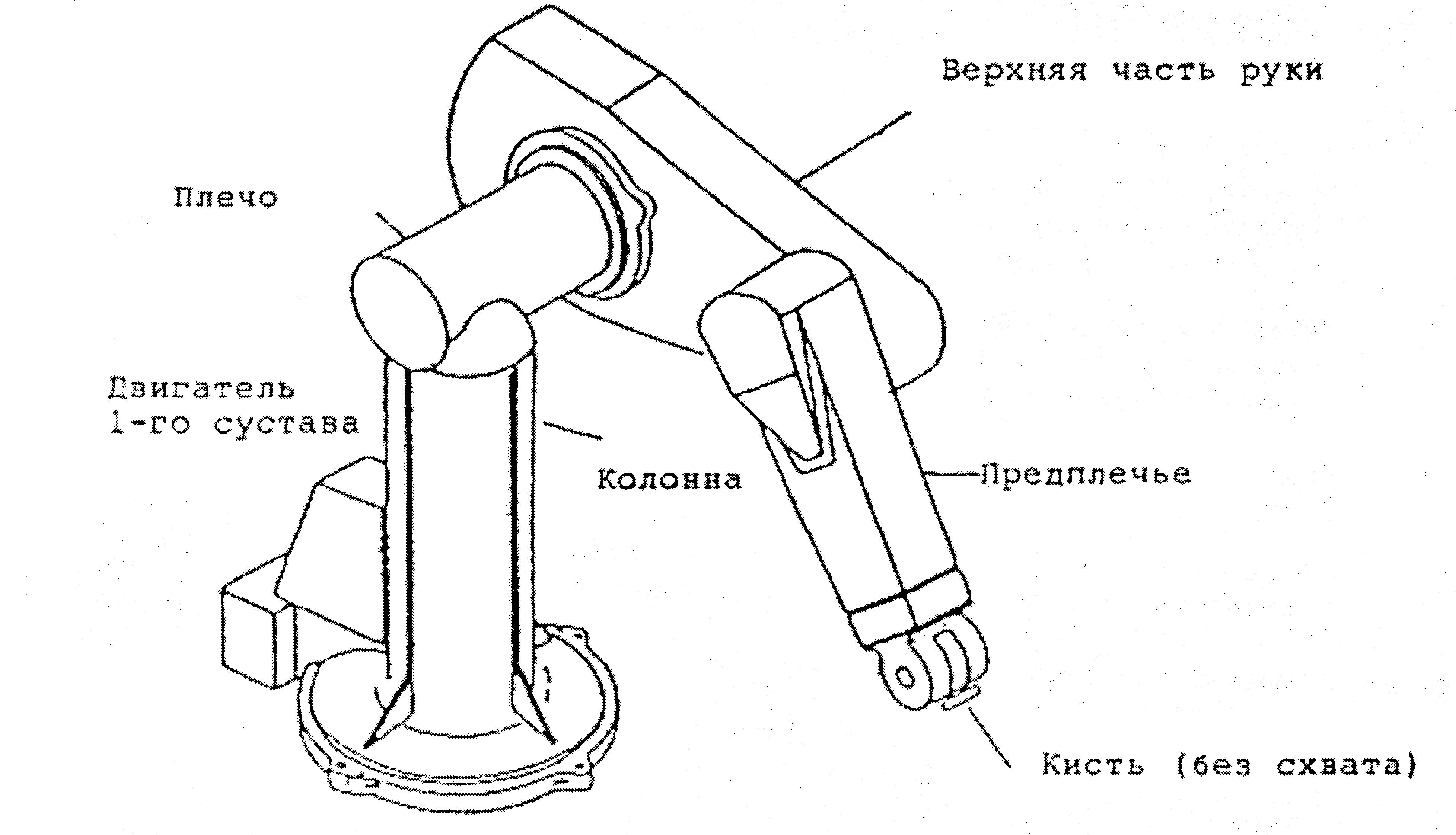 Поддерживается несколько передаточных чисел, поэтому я могу точно настроить скорость робота. Я остановился на самых дешевых колесах, которые подойдут к валу из этого комплекта, Tamiya 70101 Truck Tire Set. Этот комплект поставляется с четырьмя колесами, а мне нужны только два, но он стоит дешево, а запасные части лишними никогда не будут! Переднее колесо – это просто шаровая опора или пластиковый винт, чтобы робот мог скольких по полу.
Поддерживается несколько передаточных чисел, поэтому я могу точно настроить скорость робота. Я остановился на самых дешевых колесах, которые подойдут к валу из этого комплекта, Tamiya 70101 Truck Tire Set. Этот комплект поставляется с четырьмя колесами, а мне нужны только два, но он стоит дешево, а запасные части лишними никогда не будут! Переднее колесо – это просто шаровая опора или пластиковый винт, чтобы робот мог скольких по полу.
Мозги: микроконтроллер
Существует несколько различных микроконтроллерных платформ, которые довольно популярны. Основываясь на популярности, очевидным выбором является какая-либо Arduino. Другие варианты: Teensy, Launchpad и Raspberry Pi. Pi слишком большой и прожорливый, Launchpad тоже слишком большой. В прошлом я использовал Teensy, и это был хороший опыт. Teensy немного дороже, чем Arduino Mini, но предлагает гораздо более мощную платформу. Последняя плата Teensy снабжена Cortex M4, который обладает достаточной мощностью для простого робота. Бонусом к Teensy является встроенный стабилизатор на 500 мА, который может быть использован для питания всех датчиков.
Бонусом к Teensy является встроенный стабилизатор на 500 мА, который может быть использован для питания всех датчиков.
Взаимодействие: датчики
Для следования за линией и следования за стенами требуются разные датчики. Датчики для следования за линией – это обычно рефлектометры, которые изменяют выдаваемое напряжение в зависимости от того, сколько света отражается от земли. Это делается с помощью светодиода и фотодиода или датчика освещенности. Детекторы стен и препятствий – это обычно датчики расстояния. Оба типа этих датчиков были доступны в удобных DIP корпусах в том же магазине, что и двигатели, что позволило мне сэкономить на доставке и легко их припаивать. По поводу датчика линии, я нашел датчик с тремя сенсорами, которые позволяют роботу в любое время центрироваться относительно линии. По поводу датчика расстояния, я решил использовать инфракрасный датчик высокой яркости, так как в данном проекте я имел дело более низким напряжением, чем ожидалось.
Питание: драйвер двигателя, батарея
Драйвер двигателя должен иметь возможность управлять трехвольтовыми двигателями, выбранными ранее. Я также хотел, чтобы он был масштабируемым на случай, если я захочу в будущем заменить двигатели. Я нашел драйвер всё в том же магазине. Он может работать с напряжениями 0–11 В и обеспечивать достаточно большие токи для двигателей, которые я захотел бы поставить в будущем. По поводу аккумулятора, я бы предпочел, чтобы робот работал на чем угодно. Teensy работает с напряжениями до 5,5 В, что означает, что можно использовать литиевый аккумулятор. Однако для лития требуется зарядное устройство, а я не хочу увеличивать расходы. Использование двух обычных батарей AA обеспечивает довольно много энергии без необходимости зарядного устройства. Недостатком является то, что они обеспечивают только ~3 В и большие по размеру. Входное напряжение 3 В неже линейного стабилизатора Teensy на 3,3 В. Робот всё равно будет работать, потому что все компоненты, выбранные для Teensy, могут работать на более низком напряжении. Тем не менее, встроенный на Teensy стабилизатор напряжения стабилизировать не будет.
Я также хотел, чтобы он был масштабируемым на случай, если я захочу в будущем заменить двигатели. Я нашел драйвер всё в том же магазине. Он может работать с напряжениями 0–11 В и обеспечивать достаточно большие токи для двигателей, которые я захотел бы поставить в будущем. По поводу аккумулятора, я бы предпочел, чтобы робот работал на чем угодно. Teensy работает с напряжениями до 5,5 В, что означает, что можно использовать литиевый аккумулятор. Однако для лития требуется зарядное устройство, а я не хочу увеличивать расходы. Использование двух обычных батарей AA обеспечивает довольно много энергии без необходимости зарядного устройства. Недостатком является то, что они обеспечивают только ~3 В и большие по размеру. Входное напряжение 3 В неже линейного стабилизатора Teensy на 3,3 В. Робот всё равно будет работать, потому что все компоненты, выбранные для Teensy, могут работать на более низком напряжении. Тем не менее, встроенный на Teensy стабилизатор напряжения стабилизировать не будет.
Дополнительные элементы
В какой-то момент я захотел, чтобы роботом можно было бы управлять через смартфон, и поэтому добавил на схему устройство BLE. Это не обязательно, чтобы следовать за линиями или стенами, но я подумал, что это будет отличное дополнение. Я также хочу, чтобы элементы можно было легко отключить, поэтому для подключения всего буду использовать на плате разъемы (мама).
Полный список компонентов
Обязательные компоненты
| Тип компонента | Модель компонента | Стоимость |
|---|---|---|
| Микроконтроллер | Teensy 3.2 | 19.80 |
| Двигатель | Tamiya 70168 | 9.25 |
| Драйвер двигателя | DRV8835 | 4.49 |
| Шаровая опора | Tamiya 70144 | 5.99 |
| Датчик отражателя | QTR-3RC | 4.95 |
| Колеса | Tamiya 70101 | 4.10 |
| Датчик расстояния | Pololu 38kHz | 5. 95 95 |
| Печатная плата | Elecro 10x10cm | 14.00 |
| Держатель батарей | Держатель батарей 2-AA | 0.79 |
| Общая стоимость без доставки | $49.52 | |
Дополнительные компоненты
| Тип компонента | Модель компонента | Стоимость |
|---|---|---|
| Беспроводной модуль | nRF51 Dongle | 52.39 |
| Разъемы | Штырьковые разъемы | 5.00 |
Схема
Для рисования схемы и макета я использую бесплатную версию Eagle CAD. Я создал пользовательские условные обозначения и площадки для монтажа для всех элементов, кроме платы Teensy, доступной для скачивания во второй части из данной серии статей. У Teensy есть библиотеки для Eagle. Вы можете заметить, что на схеме отсутствуют какие-либо простые устройства, такие как резисторы и конденсаторы. Это связано с тем, что каждая из этих плат является уже готовой платой с выводами, чтобы сделать сборку максимально простой. Любой современный чип, скорее всего, будет для поверхностного монтажа, что для любителя может вызвать затруднения. Схемы для каждой из этих плат доступны у соответствующих продавцов. Вот несколько ключевых моментов к этой схеме:
Любой современный чип, скорее всего, будет для поверхностного монтажа, что для любителя может вызвать затруднения. Схемы для каждой из этих плат доступны у соответствующих продавцов. Вот несколько ключевых моментов к этой схеме:
- Я поместил перемычку между батареей и остальной частью схемы. Это полезно для отключения питания без снятия батарей, измерения тока или защиты с помощью диода от обратной полярности.
- Все интерфейсы являются цифровыми, за исключением двух. Существует UART соединение между nRF51 и Teensy через выводы 9/10. Контроллер двигателя работает через ШИМ, который поступает через выводы 6 и 4 Teensy.
- На схеме нет светодиода. Светодиод, который находится на Teensy, может использоваться для отладки или индикации.
- Здесь нет кнопки. Я подумал о том, чтобы поставить кнопку на линию сброса Teensy, но решил сэкономить.
- При программировании Teensy через USB вы должны либо разрывать небольшую дорожку, соединяющую Vin/Vusb, либо убедиться, что, когда подключен USB, батареи отключены.

Заключение
В данной статье я изложил требования к роботу и мои варианты конструкции, которые удовлетворяли бы эти требования. Эти варианты привели к созданию схемы и перечня элементов, чтобы оценить затраты на проект. Во второй статье из данной серии я нарисую печатную плату, чтобы ее можно было изготовить!
Оригинал статьи:
Теги
MCUTeensyДатчикДрайвер двигателяМикроконтроллерРобототехникаСохранить или поделиться
Роботы-палетайзеры Robot-In-A-Box, Soco System
ЗАО «Роксор Индастри предлагает компактные портальные 3-х осевые роботы-паллетайзеры Robot-In-A-Box с универсальным вакуумным захватом (гриппером) для коробов, производства компании Soco System A/S (Дания).
Роботы поставляются со встроенным программным обеспечением, позволяющим задавать и менять схему укладки продукта, количество слоев.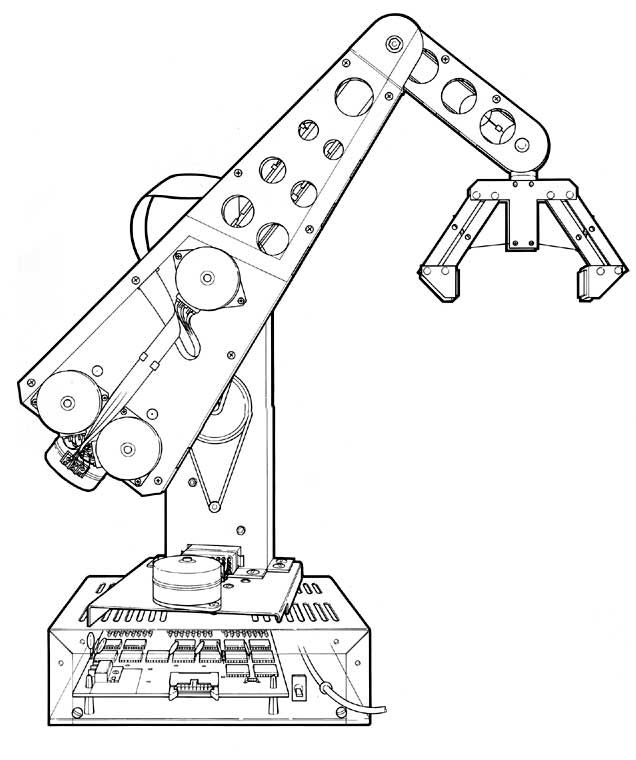 Максимальный вес палетируемого продукта — 30 кг.
Максимальный вес палетируемого продукта — 30 кг.
Производительность робота — 10 циклов в минуту, при этом гриппер может захватывать сразу несколько единиц продукта одновременно, в зависимости от размера, веса и качества продукта.
Стандартная ширина подающего конвейера — 500 мм. Робот может работать с палетой 1200 х 800мм, 1000 х 1200мм, 1200 х 1200 мм.
Возможна поставка робота в следующих комплектациях:
Robot-In-A-Box
— Простое решение «Plug & Play» для автоматизации укладки продукта на паллету;
— Максимальный вес груза – 20-25кг;
— Производительность – до 10 циклов в минуту, в зависимости от раскладки продукта на паллете и размеров продукта;
— Программирование робота осуществляется как в оффлайн так и в онлайн режиме;
— Паллета подается под загрузку и вывозится оператором.
PRS Single palletisingrobot
— Усовершенствованный стандартный 3-х осевой робот для одной линии;
— Большое количество опций;
— Возможность выбора стороны подачи продукта;
— Возможность оборудования машины встроенным диспенсером гофрокартонных межслойных листов;
— Возможность автоматической подачи и отвода палет;
— Различные варианты защитных ограждений.
PRD double palletisingrobot
— Стандартный 3-х осевой робот для палетирования продукта на 2 палеты;
— Укладка одного продукта на две палеты. Когда одна паллета спаллетирована, процесс укладки не прекращается;
— Возможность укладки двух различных продуктов, подающихся с одной линии;
— Возможность укладки двух различных продуктов с двух подающих линий.
Преимущества оборудования Soco System
— Малые габариты, которые позволяют эффективно использовать имеющееся пространство;
— Большой модельный ряд оборудования;
— Легкая программа настройки;
— Высокое качество исполнения и надежность;
— Модульная конструкция, возможность при необходимости менять конфигурацию в будущем;
— Отсутствие необходимости в специальном фундаменте под оборудование;
— Безотказная работа в сочетании с низкими затратами;
— Легкость в обслуживании.
Сбербанк предупредил о новой схеме мошенничества
https://ria.ru/20201127/moshennichestvo-1586705087.html
Сбербанк предупредил о новой схеме мошенничества
Сбербанк предупредил о новой схеме мошенничества – РИА Новости, 28.11.2020
Сбербанк предупредил о новой схеме мошенничества
Телефонные мошенники начали активно использовать в своей работе роботов: те под видом помощника Сбербанка сообщают клиентам о якобы подозрительных операциях и… РИА Новости, 28.11.2020
2020-11-27T22:54
2020-11-27T22:54
2020-11-28T10:28
россия
мошенничество
сбер
сбербанк россии
технологии
общество
/html/head/meta[@name=’og:title’]/@content
/html/head/meta[@name=’og:description’]/@content
https://cdn23.img.ria.ru/images/155734/20/1557342035_0:160:3072:1888_1920x0_80_0_0_af3e70c77dd216fe2c238e29c4eb1a6e.jpg
МОСКВА, 27 ноя — РИА Новости. Телефонные мошенники начали активно использовать в своей работе роботов: те под видом помощника Сбербанка сообщают клиентам о якобы подозрительных операциях и предлагают соединить с псевдосотрудником службы безопасности, предупредил банк в своем Telegram-канале.”Злоумышленники в телефонном мошенничестве начали активно использовать роботов-помощников”, — предупредили в банке.При этом отмечается, что схема достаточно проста: она повторяет стандартный “звонок от службы безопасности”, однако специально обученных людей заменили роботами. “Сейчас звонит якобы робот-помощник из Сбера и сообщает о подозрительных операциях, после чего предлагает соединить жертву с фиктивной службой безопасности”, — добавили в банке.Сбербанк обратил внимание, что мошенники очень часто звонят с номеров, которые начинаются на +7 495 или +7 499. При этом банк звонит с номера 900.
https://radiosputnik.ria.ru/20201116/moshenniki-1584779519.html
https://ria.ru/20201121/moshenniki-1585530956.html
россия
РИА Новости
7 495 645-6601
ФГУП МИА «Россия сегодня»
https://xn--c1acbl2abdlkab1og.xn--p1ai/awards/
2020
РИА Новости
7 495 645-6601
ФГУП МИА «Россия сегодня»
https://xn--c1acbl2abdlkab1og.xn--p1ai/awards/
Новости
ru-RU
https://ria.ru/docs/about/copyright.html
https://xn--c1acbl2abdlkab1og.xn--p1ai/
РИА Новости
7 495 645-6601
ФГУП МИА «Россия сегодня»
https://xn--c1acbl2abdlkab1og.xn--p1ai/awards/
https://cdn22.img.ria.ru/images/155734/20/1557342035_171:0:2902:2048_1920x0_80_0_0_8aa5cca852f1be09e446b7e3158fedb1.jpgРИА Новости
7 495 645-6601
ФГУП МИА «Россия сегодня»
https://xn--c1acbl2abdlkab1og.xn--p1ai/awards/
РИА Новости
7 495 645-6601
ФГУП МИА «Россия сегодня»
https://xn--c1acbl2abdlkab1og.xn--p1ai/awards/
россия, мошенничество, сбер, сбербанк россии, технологии, общество
Устройство (схема) промышленного робота. Приводы промышленных роботов. Механизмы промышленных роботов.
Устройство современных промышленных роботов довольно сложно. Этим объясняется то, что производители выполняют их обслуживание и ремонт практически всегда сами.
Устройство промышленного робота может быть различным в зависимости от типа робота: шарнирный робот, дельта робот или SCARA робот. Рассмотрим схему промышленного робота на примере шарнирного робота. Упрощенно робот состоит из следующих компонентов:
-
блока управления с пультом;
-
опорной конструкции;
-
привода руки манипулятора;
-
руки манипулятора;
-
запястья манипулятора;
-
захватного устройства.
Компоненты робота-манипулятора соединяются с помощью суставов (обычно от 4-х до 6). Каждый элемент представляет собой полую металлическую конструкцию с проложенными внутри коммуникациями. Каждое сочленение робота приводится в движение при помощи шаговых двигателей, которые позволяют частям робота перемещаться очень точно, при этом одинаково точно независимо от количества циклов.
Исполнительный механизм робота манипулятора представляет собой открытую кинематическую цепь, звенья которой последовательно соединены собой и обладают, как правило, одной степенью свободы. Подвижность робота определяется сочетанием и взаимным расположением сочленений, при это условно сочленения подразделяются на две группы: выполняющие транспортную функцию, предназначенные для вывода манипулятора в нужную позицию, и выполняющие ориентирующую функцию, отвечающие за ориентацию рабочего органа.
На конце манипулятора промышленного робота устанавливается исполнительный (рабочий) орган. В качестве рабочего органа чаще всего выступает захват или иной специализированный инструмент. Как уже было сказано выше, самым распространенным видом исполнительного органа является схват, предназначенный для захвата и перемещения груза. Подробнее о захватах для промышленного робота вы можете прочитать по ссылке.
В общем виде все захватные устройства подразделяются на схватывающие, поддерживающие и удерживающие.
В качестве рабочего органа промышленного робота могут использоваться сварочные клещи, пульверизатор, фреза, дрель, нож, сварочная головка, отвертка и т.д.
Приводы промышленных роботов предназначены для приведения в движение звеньев манипулятора и бывают: электрические, гидравлические и пневматические. Об электрических приводах промышленных роботов мы немного сказали выше. Скажем еще, что электрические приводы роботов являются наиболее распространенными ввиду своей точности. Гидравлические приводы промышленных роботов обеспечивают большее усилие и быстродействие, однако они устанавливаются лишь на роботах очень большой грузоподъемности. Пневматические приводы не обладают большими развиваемыми усилиями и применяются на небольших роботах, когда необходимо обеспечить высокую скорость работы.
Следует отметить что механизмы промышленных роботов всех основных производителей обладают высокой износоустойчивостью, обеспечивая ресурс работы до обслуживания в несколько тысяч часов и более.
Контроллеры промышленного робота состоят из блока управления и пульта управления. Блок управления предназначен для управления роботом, при этом он может одновременно управлять несколькими роботами. Пульт управления предназначен для программирования робота или оперативного внесения изменений в его работу.
Если у вас есть какие-либо вопросы по устройству (схеме) промышленного робота вы всегда можете обратиться к специалистам компании АЛЬФА ИНЖИНИРИНГ. Мы будем рады проконсультировать вас по всем вопросам работы промышленного робота и в случае необходимости выполним внедрение робототехнической ячейки на базе роботов FANUC «под ключ».Дроны. Вопросы и ответы – War Robots
Дроны доступны в игре уже пару недель. Вы экспериментируете и находите новые безумные сборки, которые потрясают нас самих.
Тем временем, у многих возникли вопросы. Мы собрали самые частые и ответили на них. Погнали!
1. Чем различаются типы микросхем?
Микросхемы разбиты по типам, чтобы подчеркнуть различия по задачам, которые они выполняют.
Тип A — наложение эффектов и всякие не попадающие в другие группы эффекты
Тип B — увеличение атакующих характеристик робота (в первую очередь дамага)
Тип C — увеличение защитных характеристик робота (ХП, резистов)
Тип D — починка и в будущем — другие эффекты поддержки
Тип AC — он же Arms Controller — стрельба
2. Зачем микросхемам типы?
Таким образом дроны затачиваются под разные роли. Например, дрон, у которого много слотов типа C — готовый кандидат в защитники.
Еще одна причина по которой мы разбили схемы на типы — так в них легче ориентироваться. Вы думаете — “Мне нужно что-то, что позволит моему роботу наносить больше урона” — значит, вам нужны схемы типа B.
3. Какие дроны могут стрелять, а какие нет? Как это понять?
На данный момент существуют следующие дроны со встроенной пушкой: Sharpshooter, Good Guy, The Eye, Wasp.
Понять, какие дроны стреляют, а какие нет, можно по наличию AC-слота — он всегда в левом верхнем углу и у него оранжевая иконка.
4. Накладывает ли встроенное оружие и урон от способностей эффекты дронов?
Да.
5. От чего зависят типы разъемов в дроне? Зависят ли они от типа дрона?
Типы разъемов каждый раз выбираются случайным образом при покупке дрона — кроме одного слота AC-типа, который всегда есть у дронов подготовленных к стрельбе.
6. От чего зависит схема получаемая при объединении? Зависят ли типы чипов, полученных из объединения, от типа дрона?
При объединении вы всегда получаете схему того же типа, что и объединенные, но — рангом выше. При этом эффект от этой схемы всегда определяется случайно и не зависит ни от каких факторов.
7. Какие схемы доступны в игре?
Мы собрали табличку всех доступных в игре микросхем — она в самом низу статьи.
8. Как взаимодействуют проценты одинаковых эффектов от дрона и оружия? (например, заморозка от микросхемы в Дроне и от пушки Cryo)
Проценты от эффектов складываются. Вы получаете бонус и от Дрона, и от пушки в полном размере. Если хотите, чтобы ваши Cryo быстрее замораживали, подкрепить их дроном со схемой на заморозку — не самая плохая идея.
9. Распространяется ли эффект “пока робот иммунен к…” на иммунитет от Anticontrol?
Да!
10. Распространяется ли эффект Phasing Repairer на способность Ravana?
Нет. У Transcendence и Phase Shift разные названия — значит, это два разных эффекта.
11. Есть модуль “Пока робот находится в состоянии иммунитета к Freeze, увеличивает его урон.” А как получить иммунитет к Freeze?
Роботы получают временный иммунитет к заморозке после того, как эффект заморозки сходит на нет.
12. Как работает накопление эффектов? Что это за процент, и к чему он добавляется? Есть ли предел?
Все эффекты складываются между собой. Однако из-за особенностей стрельбы ряда пушек, накопление может происходить быстрее/медленнее в зависимости от того, какая пушка используется.
Предела для роста эффекта нет — вы ограничены только емкостью дрона. Как раз за счет нее способности не достигать совсем уж запредельных значений.
13. Как удалить купленного дрона?
Отправьте дрона из ангара в инвентарь. Если дрон лежит в инвентаре, то в правом нижнем углу меню этого дрона появится иконка с мусорной корзиной.
14. Дроны слишком дорогие!
Дроны — про вариативность, кастомизацию и стратегию. Они в игре всерьез и надолго, и нет смысла пытаться сразу получить лучшие сборки. Уже от базового дрона Starter можно получить немало пользы, и мы рекомендуем начать эксперименты именно с таких недорогих моделей.
В будущем мы планируем добавить больше способов добывать схемы и самих дронов (через сундуки во время событий, например).
15. Мне лень возиться со схемами! Где взять готовые сборки?
Подглядывайте у ютуберов! А еще мы планируем выпускать готовые сборки время от времени — в виде рекомендаций и офферов. Следите за нашими соцсетями!
| Разъем | Название | Ранги | Описание |
|
А |
Battery Microchip | 1-4 | Увеличивает емкость батареи дрона. |
| Defence Mitigator | 1-4 | Добавляет оружию дрона эффект “Снижения защиты”. | |
| Control Resistor | 1-4 | Уменьшает скорость накопления эффектов на роботе. | |
| Acid Sprayer | 2-4 | Добавляет оружию дрона периодический урон. | |
| Suppressor | 2-4 | Позволяет всему вооружению робота накладывать Suppression. | |
| Freezer | 2-4 | Позволяет всему вооружению робота накладывать Freeze. | |
| Lockdowner | 2-4 | Позволяет всему вооружению робота накладывать Lock-down. | |
| Anti-Acid | 3-4 | Уменьшает эффект DoT-урона. | |
|
B |
Modulative Intensifier | 2-4 | После использования активного модуля, увеличивает урон робота на 7 секунд. |
| Resurgent Intensifier | 2-4 | После снятия эффекта Suppression, увеличивает урон робота на 7 секунд. | |
| Inhibited Intensifier | 2-4 | Пока на робота наложен эффект Lock-down, повышает урон робота. | |
| Raging Intensifier | 2-4 | Пока активен Battle Born, увеличивает урон робота. | |
| Struggling Intensifier | 2-4 | Пока активен Last Stand, увеличивает урон робота. | |
| Unimpeded Intensifier | 2-4 | Пока робот находится в состоянии иммунитета к Lock-down, увеличивает его урон. | |
| Inciting Intensifier | 2-4 | Пока робот находится в состоянии иммунитета к Suppression, увеличивает его урон. | |
| Thermic Intensifier | 2-4 | Пока робот находится в состоянии иммунитета к Freeze, увеличивает его урон. | |
| Revitalizing Intensifier | 3-4 | После использования Rapair Unit или Advanced Repair Unit, увеличивает урон робота на 7 секунд. | |
|
C |
Impaired Defender | 1-4 | Пока на робота наложен эффект Suppression, повышает мощность его Системы защиты. |
| Recurrent Emergency Defender | 1-4 | При снижении прочности робота ниже 30%, увеличивает мощность Системы защиты робота. | |
| Inhibited Defender | 1-4 | Пока на робота наложен эффект Lock-down, повышает мощность его Системы защиты. | |
| Recurrent Forewarning Defender | 2-4 | При снижении прочности робота ниже 50%, увеличивает мощность Системы защиты робота. | |
| Modulative Intensifier | 2-4 | После использования активного модуля, увеличивает урон робота на 7 секунд. | |
| Debilitating Defender | 2-4 | Если накопление эффекта Lock-down на роботе достигает 50%, повышает мощность его Системы защиты на 5 секунд. | |
| Arctic Defender | 2-4 | Если накопление эффекта Freeze на роботе достигает 50%, повышает мощность его Системы защиты на 5 секунд. | |
| Revitalizing Defender | 2-4 | После использования Rapair Unit или Advanced Repair Unit, увеличивает мощность Системы защиты робота на 5 секунд. | |
|
D |
Recurrent Reconstructive Repairer | 1-4 | Увеличивает эффективность ремонта, если за 5 секунды было отремонтировано более 40000 прочности. |
| Recurrent Emergency Repairer | 1-4 | При снижении прочности робота ниже 30%, мгновенно ремонтирует ее часть робота. | |
| Recurrent Crashing Repairer | 1-4 | Если робот получил больше 100000 урона за 3 секунды, мгновенно ремонтирует часть его прочности. | |
| Recurrent In-trouble Repairer | 2-4 | Если робот получил больше 70000 урона за 5 секунд, мгновенно ремонтирует часть его прочности. | |
| Phasing Repairer | 2-4 | Когда робот выходит из Phase Shift, мгновенно ремонтирует часть его прочности. | |
|
E |
Target-seeking Minigun Shooter | 3-4 | Схема, позволяющая дрону вести огонь на подавление благодаря большому боезапасу и высокой скорострельности. Дрон может стрелять независимо от робота. |
| Target-seeking Cannon Shooter | 3-4 | Схема, позволяющая дрону наносить значительный урон на большом расстоянии. Дрон может стрелять независимо от робота. | |
| Imitating Rifle Shooter | 3-4 | Схема, позволяющая дрону наносить значительный урон на большом расстоянии. Дрон с такой схемой поддерживает робота, стреляя вместе с ним. | |
| Imitating Rocket Shooter | 3-4 | Схема, позволяющая дрону стрелять разрывными снарядами. Дрон с такой схемой поддерживает робота, стреляя вместе с ним. |
Схема конструкции робота. | Скачать научную диаграмму
Контекст 1
… другие компоненты – 14 светодиодов и зуммер для индикации. Принципиальная схема робота представлена на рисунке 1. Всего API робота состоит из 21 оптического датчика для обнаружения линий на земле, 2 двигателей постоянного тока, серводвигателя, который контролирует наклон камеры, датчика расстояния и 14 Светодиоды и зуммер служат индикаторами (Таблица 2). …
Контекст 2
… дескриптор нормализует свои ячейки по общему количеству точек, которые представляют руку, а также нормализует компонент распределения формы [41]. Этот подход дает дескриптор, который хорошо подходит для нашей цели, поскольку он глобален, быстро вычисляется, не зависит от масштаба и зависит от позы (рисунки 9 и 10). Эта последняя функция позволит нам решить во время тренировки, следует ли рассматривать две разные позы как один и тот же жест или разные жесты (рисунок 11). …
Контекст 3
…. подход дает дескриптор, который хорошо подходит для нашей цели, потому что он глобален, быстро вычисляется, не зависит от масштаба и зависит от позы (рисунки 9 и 10). Эта последняя функция позволит нам решить во время тренировки, следует ли рассматривать две разные позы как один и тот же жест или разные жесты (рисунок 11). После определения возможных жестов сохраняется несколько дескрипторов различных кадров каждого жеста. …
Контекст 4
…. эффективность всего процесса (сегментация и распознавание) сильно зависит от количества различных жестов, которые необходимо различать, и различий между жестами из-за различий в морфологических особенностях и позах (рис. 12). Во время обучения алгоритма можно выполнять распознавание с учетом инвариантности позы, группируя одну и ту же фигуру в разных позах как один и тот же жест и увеличивая количество кадров, захваченных на один жест. …
Контекст 5
…. в целом, мы можем утверждать, что для различения заданного количества жестов большее количество кадров на жест в базе данных приведет к более высокой точности. Можно выделить несколько различий между гистограммами каждого примера (рисунки 9 и 10) в отношении первой части гистограммы, представляющей компоненты FPFH, закодированные как набор угловых вариаций, таких как шаг (α), крен (H). и рыскание (θ) (Рисунок 8). Все они рассчитываются с использованием одинакового количества повторений для каждого значения….
Контекст 6
… из них вычисляются с использованием одинакового количества повторений для каждого значения. На рис. 9 показано представление «0 пальцев» с помощью жеста закрытой руки, а на рис. 10 показаны пять примеров наиболее распространенных представлений от 1 до 5, которые могут быть представлены жестами руки путем вытягивания пальцев. Сравнение первой и пятой выборок на фиг.10 относительно первой части гистограмм показывает изменения в дисперсии угловых вариаций….
Context 7
… 9 показывает представление 0 пальцев посредством жеста закрытой руки, а на рисунке 10 показаны пять примеров наиболее распространенных представлений от 1 до 5, которые могут быть представлены рукой. жесты вытягиванием пальцев. Сравнение первой и пятой выборок на фиг.10 относительно первой части гистограмм показывает изменения в дисперсии угловых вариаций. Таким образом, первый образец показывает, что есть больше интервалов без нулевых значений, а гистограмма имеет большее распределение угловых значений….
Контекст 8
… то есть первая выборка имеет большую дисперсию, чем четвертая или пятая выборка. Но также пятый образец показывает, что угловые значения более сконцентрированы вокруг трех интервалов, чем в остальных образцах на Рисунке 10. Подводя итог, эта концентрация возникает для разных значений на каждой гистограмме, что приводит к резким концентрациям на энтропийном фоне. …
Context 9
… что они меньше связаны с морфологией жеста (т.е.е., с формой рисунка руки, воспроизводимой пользователем). Эти вариации можно увидеть на рисунке 12, который представляет собой наложение трех жестов. …
Context 10
… API сценариев, можно создавать поведения для робота. В эксперименте, описанном ниже, верхний ряд из 12 отражающих оптических датчиков CNY70 с транзисторным выходом используется для выполнения стратегии движения по линии (рис. 13). Цель состоит в том, чтобы реализовать простое отслеживание линии путем получения положения первого датчика (слева) для обнаружения линии….
Контекст 11
… система была обучена с использованием базы данных из 250 образцов на жест в обоих экспериментах (таблицы 3 и 4). Все жесты фиксировались сенсором Kinect в реальном времени из разных сред и разных пользователей (примеры показаны на рисунках 4, 5 и 14). …
Контекст 12
… затем была измерена ошибка как отклонение между центральным датчиком (рис. 1) и датчиком считывания. Поскольку имеется 12 датчиков (с метками x в диапазоне от 0 до 11, где центральные датчики пронумерованы 5 и 6), формула для этой ошибки отклонения:…
Контекст 13
… общее движение робота контролируется контроллером с разомкнутым контуром на основе трехмерных данных, полученных от внешнего датчика RGBD, а путь робота контролируется замкнутым -контроллер контура на основе данных с датчиков, установленных на роботе; они используются, например, чтобы позволить роботу следовать черной линии на полу, чтобы переходить из одной комнаты в другую. На рисунке 15 показано поведение недорогого робота, идущего по пути между двумя комнатами, по команде человека-пользователя с помощью жеста руки.Сначала распознается жест, и соответствующая команда отправляется роботу; затем робот активируется и движется, чтобы достичь своей цели. …
Контекст 14
… движение робота контролируется его датчиками, так что он выдерживает определенное расстояние по отношению к желаемой траектории (изогнутой или прямой). На рисунке 15а показано отклонение от желаемой траектории. В этом случае датчики 5 и 6 (рисунок 1) демонстрируют колебания из-за ошибок измерения и скорости робота….
Контекст 15
… 15a показывает отклонение от желаемого пути. В этом случае датчики 5 и 6 (рисунок 1) демонстрируют колебания из-за ошибок измерения и скорости робота. Как для прямых, так и для кривых траектории имеют тенденцию к колебаниям примерно с ε = 0,5. …
Context 16
… есть начальные пики с отклонением ε = 3,5 (38,5%), эти случаи не представляют проблемы для робота при отслеживании своего пути для достижения своей цели.В общем, алгоритм применяет больше мощности к двигателю, противоположному положению обнаруженной линии, как показано на рисунке 15b, для корректировки положения по отношению к желаемому пути. …
Контекст 17
… Эксперимент описывает пример использования полной системы (рисунок 16) по месту жительства иждивенца (рисунок 17). …
Контекст 18
… Эксперимент описывает пример использования полной системы (рисунок 16) по месту жительства иждивенца (рисунок 17)….
Контекст 19
… переходы определяются списком предыдущих состояний и условием запуска, определяемым жестами. На рисунке 16 показан пример действий, связанных с состояниями и последовательностью жестов. Таким образом, SM указывает, что для перехода из состояния ВЫКЛ в состояние ВКЛ требуется последовательность из трех жестов левой рукой. …
Context 20
… видно, робот не может просто воспроизводить отмеченные траектории; его также можно запрограммировать на выполнение действий по-другому с помощью распознавания жестов в нескольких позах.Через беспроводную сеть дома можно получить доступ к видеопотоку с камеры робота с помощью простого веб-браузера, предоставляя пользователю обратную связь от первого лица (рисунок 18). Повышение сложности обнаружения жеста за счет включения конечного автомата между ними, улучшает отклонение ошибочных обнаружений и делает вывод более надежным (таблица 8). …
Context 21
… отфильтровать любые оставшиеся ошибки до изменения состояния машины, выполняется оценка трех входящих жестов на основе голосования, и жест с наиболее идентифицированными вхождениями принимается как задумано.На рис. 19 показан набор используемых жестов, которые были выбраны потому, что они легко имитируются кем угодно (эргономичны) и обеспечивают хороший результат распознавания. Кроме того, он показывает отклоненные жесты, которые не были учтены по нескольким причинам, таким как сложная имитация, чрезмерное сходство с другими жестами (вероятность успеха дескриптора в процессе распознавания значительно снижается) или жест не интуитивно понятен; то есть пользователю было бы трудно запомнить действие в соответствии с формой и положением….
Контекст 22
… критерием было выбрать самый надежный жест для левой руки и наиболее интуитивно понятный для правой руки. Рис. 19. Жесты, используемые для управления роботом в наших экспериментах. …
Мы не можем найти эту страницу
(* {{l10n_strings.REQUIRED_FIELD}})
{{l10n_strings.CREATE_NEW_COLLECTION}} *
{{l10n_strings.ADD_COLLECTION_DESCRIPTION}}
{{l10n_strings.COLLECTION_DESCRIPTION}} {{addToCollection.description.length}} / 500 {{l10n_strings.TAGS}} {{$ item}} {{l10n_strings.PRODUCTS}} {{l10n_strings.DRAG_TEXT}}{{l10n_strings.DRAG_TEXT_HELP}}
{{l10n_strings.LANGUAGE}} {{$ select.selected.display}}{{article.content_lang.display}}
{{l10n_strings.AUTHOR}}{{l10n_strings.AUTHOR_TOOLTIP_TEXT}}
{{$ select.selected.display}} {{l10n_strings.CREATE_AND_ADD_TO_COLLECTION_MODAL_BUTTON}} {{l10n_strings.CREATE_A_COLLECTION_ERROR}}Как работает роботизированная хирургия да Винчи?
Все больше и больше ведущих хирургов предпочитают проводить операции с помощью роботизированных инструментов. Операции и процедуры, которые когда-то требовали больших разрезов и недель восстановления, теперь стали минимально инвазивными, более эффективными и возвращают пациентов к нормальной деятельности в считанные дни.
Роботы да Винчи в операционной
Городская больница Гуттенберга является домом для самого современного хирургического робота da Vinci: хирургическая система da Vinci Si, которая позволяет врачам работать с большей точностью и с минимальным дискомфортом для пациента.
Процесс. Хотя процедуры различаются, процесс роботизированной хирургии обычно включает в себя следующее:
- Первоначально хирург и команда роботов работают вместе, чтобы разместить робота в наиболее идеальном положении для процедуры, стратегически размещая роботизированные руки.
- Во время роботизированной операции хирург сидит за специальной консолью рядом с пациентом и хирургической бригадой.
- Очень маленькая 3D-камера и хирургические инструменты размером с монету помещаются внутрь пациента через крошечные разрезы. Камера дает хирургу увеличенный обзор операционного поля на 360 градусов.
- Используя ручное и ножное управление консоли, хирург удаленно перемещает роботизированные руки, прикрепленные к хирургическим инструментам. Хирургические техники размещаются у операционного стола, чтобы подтвердить правильность размещения хирургических инструментов.Зарегистрированные медсестры также присутствуют для оказания помощи провайдеру анестезии и наблюдения за потребностями пациента и безопасностью во время процедуры.
Преимущества роботизированной хирургии да Винчи. По сравнению с традиционными методами, очень маленькие разрезы, созданные роботизированной хирургией, значительно сокращают время пребывания пациентов в больнице и их риск заражения. Использование 3D-камер высокой четкости позволяет хирургам крупным планом рассмотреть области, которые они не могут видеть во время открытой операции. Полностью шарнирные роботизированные руки имитируют движения рук, позволяя хирургам иметь большую ловкость и контроль, чем это возможно с помощью обычных лапароскопических инструментов.
Внутри операционной. На приведенной ниже схеме показана компоновка операционной для хирургического робота da Vinci.
Любопытный робот для определения состава позволяет обнаружить новое поведение протоклеток
Дополнительные материалы к этой статье доступны по адресу http://advances.sciencemag.org/cgi/content/full/6/5/eaay4237/DC1
Дополнительные результаты и обсуждение
Дополнительные материалы и методы
Рис.S1. Данные, ведущие к обнаружению аномалии.
Рис. S2. Температурные записи для экспериментов, проведенных при 27 ° C.
Рис. S3. Наблюдения методом CA и случайным образом при 27 ° C.
Рис. S4. Плотность наблюдений по КА и случайным образом при 27 ° С.
Рис. S5. Плотность наблюдений по КА и случайным образом при 27 ° C с одинаковым масштабом.
Рис. S6. Распределение наблюдений по КА и случайное при 27 ° C.
Рис. S7. Эволюция поисковой меры для CA и случайная при 27 ° C.
Рис. S8. Наблюдения методом CA и случайным образом при 27 ° C каждые 100 итераций.
Рис. S9. Распределение параметров, выбранных с помощью случайного алгоритма при 27 ° C.
Рис. S10. Распределение целевых наблюдений по ЦА при 27 ° C.
Рис. S11. Распределение параметров, выбранных СА при 27 ° C.
Рис. S12. Распределение соотношений каждой нефти, разведанной СА и случайное при 27 ° C.
Рис. S13. Распределение полученных свойств рецептуры по СА и случайное при 27 ° C.
Рис. S14. Распределение динамических свойств капель по СА и случайному при 27 ° C.
Рис. S15. Распределение размера капель по СА и случайное при 27 ° C.
Рис. S16. Температурные записи для экспериментов, проведенных при 23 ° C и 27 ° C.
Рис. S17. Сравнение наблюдений по СА и случайным при 23 ° C и 27 ° C.
Рис. S18. Сравнение плотности наблюдений по СА и случайным при 23 ° C и 27 ° C.
Рис. S19. Сравнение разведочных мер для CA и случайных при 23 ° C и 27 ° C.
Рис. S20. Сравнение распределения наблюдений для CA и случайного при 23 ° C и 27 ° C.
Рис. S21. Сравнение соотношений пентанола в составе капель для CA и случайных при 23 ° C и 27 ° C.
Рис. S22. Экспериментирует свойства в диапазоне температур (от 17 ° C до 30 ° C) по 25 выбранным рецептам.
Рис. S23. Измеренная в сравнении с прогнозируемой температурой 140 экспериментов с каплями, основанных исключительно на их видео.
Рис. S24. Зарегистрированные температуры для 20 повторов экспериментов по выделению красителя.
Рис. S25. Гистограмма изменения цвета в начале и в конце эксперимента по выделению красителя.
Рис. S26. Соотношение пикселей, окрашенных в синий цвет, относительно времени при 18 ° C и 29 ° C.
Рис. S27. Эволюция показателей деления капель и скорости в течение одного 15-минутного эксперимента.
Рис. S28. Изменение показателей деления капель и скорости в течение одного 15-минутного эксперимента в диапазоне температур от 20 ° до 30 ° C.
Рис. S29. Рабочий процесс, использованный при составлении фазовой диаграммы температура-время.
Рис. S30. Суммарное расстояние, пройденное каплями за 15-минутный эксперимент.
Рис. S31. Разброс температур 59 экспериментов, использованных для построения фазовой диаграммы.
Рис. S32. Суммарное расстояние, пройденное каплями, сгруппированными в различных температурных интервалах.
Рис. S33. Восстановленные скорость и ускорение капель на основе данных кумулятивного смещения.
Рис. S34. Температурно-временная зависимость от поведения капель.
Фиг.S35. Трехмерная визуализация траектории капли во времени и пространстве при 21 ° C и 27 ° C.
Рис. S36. Концентрация масел в водной фазе во времени.
Рис. S37. Сравнение скоростей растворения нефти, оцененных из экспериментов ЯМР, и суммарного пройденного расстояния.
Рис. S38. Изменение скорости капель при изменении температуры и pH водной фазы.
Рис. S39. Уровень растворения каждого масла зависит от температуры и pH водной фазы.
Фиг.S40. Влияние небольших изменений в пропорции каждого масла на профиль скорости капли во время 15-минутного эксперимента.
Рис. S41. То же, что на рис. S40 с зумом на первых 200 сек.
Фиг. S42. То же, что на рис. S40 показывает стандартное отклонение.
Рис. S43. Влияние замены пентанола маслом с различной длиной цепи на профиль скорости капли во время 15-минутного эксперимента.
Фиг. S44. Влияние количества капель, помещенных в чашку, на профиль скорости капли во время 15-минутного эксперимента.
Рис. S45. То же, что на рис. S44 со стандартным отклонением.
Фиг. S46. Гидродинамический диаметр мицелл в водной фазе во времени.
Рис. S47. Концептуальный дизайн нового лабораторного робота Dropfactory.
Рис. S48. Фотография робота Dropfactory.
Рис. S49. Трехмерный вид проекта САПР.
Фиг. S50. Женевский дизайн колес.
Рис. S51. Дизайн верхних пластин женевского колеса.
Рис. S52. Фотография женевского колеса, установленного на Dropfactory.
Рис. S53. Конструкция и фото стабилизатора колеса.
Рис. S54. Используется модульный линейный актуатор, разработанный для Dropfactory.
Рис. S55. Фото насосов и химических вводов на Dropfactory.
Рис. S56. Иллюстрирую рабочие станции на масляном Женевском колесе.
Рис. S57. Фотография АЗС.
Рис. S58. Конструкция маслоналивной головки.
Рис. S59. Фотография станции перемешивания масла с небольшой пластиной магнитной мешалки.
Фиг.S60. Фото и дизайн станции очистки нефти.
Рис. S61. Фото маслосушильных станций.
Фиг. S62. Конструкция воздуховода сушильной станции.
Рис. S63. Иллюстрируем рабочие станции на водном Женевском колесе.
Рис. S64. Фотография водной заправочной станции.
Рис. S65. Конструкция направляющей трубки водонапорной станции.
Рис. S66. Фотография станции захвата и размещения шприца.
Рис. S67. Конструкция модульного шприцевого привода.
Рис. S68. Фотография записывающей станции.
Рис. S69. Дизайн записывающей станции.
Рис. S70. Фото посудомоечной машины.
Рис. S71. Дизайн станции для мытья посуды.
Рис. S72. Фото сушильной станции.
Рис. S73. Рассмотрена визуальная индикация размещения капли.
Рис. S74. Сравнение смещенного движения капли, вызванного размещением капли.
Рис. S75. Отслеживание капель через OpenCV.
Фиг.S76. Объяснение определения порога бинаризации капельного видео.
Рис. S77. Конвейер обработки изображений для обнаружения капли.
Рис. S78. Визуализация метрик площади крытой арены.
Рис. S79. Визуализация показателей разведки.
Таблица S1. Описание каждой фазы с P1 по P6 с определяющими критериями.
Таблица S2. Значения параметров для построения кривой концентрации нефти.
Таблица S3. Измеренный PH приготовления водной фазы.
Фильм S1. Работа параллельного капельного робота.
Фильм S2. Прогресс исследования для каждого алгоритма.
Фильм S3. 1-й, 10-й и 50-й рецепты капель наивысшей скорости для каждого алгоритма.
Фильм S4. Влияние температуры на рецепт капли во время эксперимента 90-х годов.
Фильм S5. Влияние температуры на рецепт капли во время 15-минутного эксперимента.
Фильм S6. Влияние температуры на выделение красителя метиленового синего.
Ссылки ( 34 – 56 )
Как подключить робот FRC – документация конкурса FIRST Robotics Competition
Примечание
В этом документе подробно описывается разводка базовой платы электроники для лабораторных испытаний.
Некоторые изображения, показанные в этом разделе, отражают настройку системы управления роботом с использованием контроллеров двигателей Victor SPX. Схема подключения и компоновка должны быть аналогичными для других контроллеров моторов. При необходимости предоставляются два набора изображений для демонстрации соединений с использованием контроллеров со встроенными проводами и без них.
Обзор
Диаграмма любезно предоставлена FRC® Team 3161 и Стефеном Асепсьоном.
Соберите материалы
Найдите следующие компоненты и инструменты системы управления
Материалы комплекта:
Панель распределения питания (PDP)
робот RIO
Модуль управления пневматикой (PCM)
Модуль регулятора напряжения (VRM)
Радио OpenMesh (с кабелем питания и кабелем Ethernet)
Сигнальная лампа робота (RSL)
4x SPARK MAX или другие контроллеры мотора
2 Y-образных кабеля ШИМ
120A Автоматический выключатель
4x 40A Автоматический выключатель
6 AWG (16 \ (мм ^ 2 \)) Красный провод
10 AWG (6 \ (мм ^ 2 \)) Красный / черный провод
18 AWG (1 \ (мм ^ 2 \)) Красный / черный провод
22 AWG (0.2 \)) Клеммные наконечники
Аккумулятор 12В
Красный / Черный Изолента
Материал или крепеж Dual Lock
Застежки-молнии
Фанера 1/4 дюйма или 1/2 дюйма (6-12 мм)
Необходимые инструменты:
Инструмент Wago или маленькая отвертка с плоским жалом
Очень маленькая отвертка с плоской головкой (ремонтный размер очков)
Отвертка с крестообразной головкой
Шестигранный ключ на 5 мм (3/16 дюйма может работать, если метрическая система недоступна)
Шестигранный ключ 1/16 дюйма
Кусачки, устройства для зачистки и обжима
7/16 дюйма (11 мм может работать, если недоступны британские) торцевой гаечный ключ или гаечный ключ
Создание основы для системы управления
Для настольной испытательной доски отрежьте кусок материала размером 1/4 дюйма или 1/2 дюйма (6–12 мм) (дерево или пластик) приблизительно 24 дюйма x 16 дюймов (60 x 40 см).Информацию о плате управления роботом Quick Build см. В сопроводительной документации для платы надлежащего размера для выбранной конфигурации шасси.
Расположение основных компонентов системы управления
Разложите компоненты на плате. Пример макета показан на изображении выше.
Крепежные детали
С помощью Dual Lock или оборудования прикрепите все компоненты к плате. Обратите внимание, что во многих играх FRC контакт робота с роботом может быть значительным, и один только Dual Lock вряд ли станет креплением для многих электронных компонентов.2 \)) клеммные наконечники, Шестигранник 1/16 дюйма, Шестигранник 5 мм, 7/16 дюйма (11 мм) Конец коробки
Присоединить клеммные колодки к разъему аккумулятора:
Используя шестигранный ключ на 1/16 дюйма, открутите два винта, которыми крепится крышка клеммной коробки PDP.
Используя шестигранный ключ на 5 мм (3/16 дюйма), снимите отрицательный (-) болт и шайбу с плазменной панели и закрепите отрицательную клемму разъема аккумуляторной батареи. 2 \)).2 \)) провод.
Используя конец коробки 7/16 дюйма (11 мм), прикрепите провод к стороне «AUX» главного выключателя на 120 А.
Используя шестигранный ключ на 5 мм, прикрепите другой конец к положительной клемме PDP.
Изолируйте соединения PDP
Требуется: шестигранник 1/16 дюйма, изолента
Изолируйте изолентой два соединения с выключателем на 120 А. Также изолируйте любую часть клемм PDP, которая будет открыта при замене крышки.Один из методов изоляции соединений главного выключателя – сначала обернуть шпильку и гайку, а затем использовать ленту, обернутую вокруг клеммы и провода, чтобы закрепить ленту.
С помощью шестигранного ключа 1/16 дюйма установите крышку клеммной коробки PDP.
Разъемы Wago
Следующим шагом будет использование разъемов Wago на плазменной панели. Чтобы использовать разъемы Wago, вставьте небольшую отвертку с плоским лезвием в прямоугольное отверстие под небольшим углом, затем наклоните отвертку вверх, продолжая нажимать, чтобы привести в действие рычаг, открывая клемму.2 \)) вилочные / кольцевые клеммы (только контроллеры клемм), устройство для обжима проводов
Для SPARK MAX или других контроллеров мотора со встроенным проводом (верхнее изображение):
Для контроллеров оконечных двигателей (нижнее изображение):
Обрежьте красный и черный провод нужной длины, чтобы он протянулся от одной из пар клемм 40A (большего размера) Wago до входной стороны контроллера мотора (с небольшой дополнительной длиной, которая будет вставлена в клеммы на каждом конце. )
Зачистите один конец каждого провода, затем вставьте его в клеммы Wago.
Зачистите другой конец каждого провода и обожмите кольцевую или вилочную клемму
Присоедините клемму к входным клеммам контроллера мотора (красный к +, черный к -)
Соединители Weidmuller
Предупреждение
Правильная длина полосы составляет ~ 5/16 дюйма (~ 8 мм), а не 5/8 дюйма (~ 16 мм), упомянутые в видео.
В ряде разъемов CAN и питания в системе используются разъемы типа «провод-плата» Weidmuller LSF.2 \)) (обратитесь к правилам для проверки требуемого калибра силовой проводки)
Концы проводов должны быть зачищены примерно на 5/16 (~ 8 мм) ”
Чтобы вставить или удалить провод, нажмите соответствующую «кнопку», чтобы открыть клемму
После подключения убедитесь, что оно чистое и безопасное:
Убедитесь, что за пределами разъема нет «усов», которые могут вызвать короткое замыкание.
Потяните за трос, чтобы убедиться, что он полностью вставлен.2 \)) и подключите его к клеммам «Vbat Controller PWR» на PDB
.Измерьте длину, необходимую для подачи питания на roboRIO. Оставьте достаточно длины, чтобы провести провода вокруг любых других компонентов, таких как аккумулятор, а также для снятия натяжения или укладки кабелей.
Обрежьте и зачистите провод.
Используя очень маленькую плоскую отвертку, подсоедините провода к входному разъему питания roboRIO (красный к V, черный к C).2 \)) провод.
Подключите провод к одной из двух пар клемм, помеченных «Vbat VRM PCM PWR» на плазменной панели.
Измерьте длину, необходимую для доступа к клеммам «12Vin» на VRM. Оставьте достаточно длины, чтобы провести провода вокруг любых других компонентов, таких как аккумулятор, а также для снятия натяжения или укладки кабелей.
Обрежьте и зачистите ~ 5/16 дюйма (~ 8 мм) от конца проволоки.
Подключите провод к клеммам VRM 12Vin.2 \)) провод.
Подключите провод к одной из двух пар клемм, помеченных «Vbat VRM PCM PWR» на плазменной панели.
Измерьте длину, необходимую для достижения клемм «Vin» на PCM. Оставьте достаточно длины, чтобы провести провода вокруг любых других компонентов, таких как аккумулятор, а также для снятия натяжения или укладки кабелей.
Обрежьте и зачистите ~ 5/16 дюйма (~ 8 мм) от конца проволоки.
Подключите провод к клеммам 12 В на PCM.
Вставьте наконечники кабеля пассивного инжектора PoE в соответствующие цветные клеммы на секции 12 В / 2 А модуля VRM.
Подключите штекерный конец кабеля RJ45 (Ethernet) к порту Ethernet на радиостанции, ближайшем к цилиндрическому разъему (с маркировкой 18-24 В POE)
Зачистите ~ 5/16 дюйма (~ 8 мм) с каждого провода CAN.
Вставьте провода в соответствующие клеммы CAN на roboRIO (желтый-> желтый, зеленый-> зеленый).
Измерьте длину, необходимую для доступа к клеммам CAN PCM (любой из двух доступных пар). Отрежьте и зачистите ~ 5/16 дюйма (~ 8 мм) с этого конца проводов.
Вставьте провода в разъемы CAN с соответствующей цветовой кодировкой на PCM. Вы можете использовать любую из пар желтых / зеленых клемм на PCM, нет определенных входов и выходов.
Зачистите ~ 5/16 дюйма (~ 8 мм) с каждого провода CAN.
Вставьте провода в соответствующие клеммы CAN на PCM.
Измерьте длину, необходимую для доступа к клеммам CAN PDP (любой из двух доступных пар). Отрежьте и зачистите ~ 5/16 дюйма (~ 8 мм) с этого конца проводов.
Вставьте провода в разъемы CAN с соответствующей цветовой кодировкой на плазменной панели. Вы можете использовать любую из пар желтых / зеленых клемм на плазменной панели, здесь нет определенных входов и выходов.
При использовании SPARK MAX подключите адаптер PWM к SPARK MAX (небольшой адаптер с 3-контактным разъемом с черными / белыми проводами).
При необходимости подключите удлинительные кабели ШИМ к контроллеру или адаптеру. На стороне контроллера сопоставьте цвета или маркировку (у некоторых контроллеров может быть зеленая / желтая проводка, зеленый должен соединяться с черным).
Присоедините другой конец кабеля к roboRIO таким образом, чтобы черный провод был направлен к внешней стороне roboRIO. Рекомендуется подключить левую сторону к ШИМ 0 и 1, а правую сторону – к ШИМ 2 и 3 для наиболее простого программирования, но любой канал будет работать, если вы заметите, какая сторона идет к какому каналу, и соответствующим образом скорректируйте код. .
При использовании SPARK MAX подключите адаптер PWM к SPARK MAX (небольшой адаптер с 3-контактным разъемом с черными / белыми проводами).
При необходимости подключите удлинительные кабели ШИМ между контроллером или адаптером и Y-кабелем ШИМ. На стороне контроллера сопоставьте цвета или маркировку (у некоторых контроллеров может быть зеленая / желтая проводка, зеленый должен соединяться с черным).
Подключите 1 Y-кабель PWM к 2 кабелям PWM для контроллеров, управляющих каждой стороной робота. Коричневый провод Y-кабеля должен совпадать с черным проводом кабеля PWM.
Подключите Y-кабели PWM к портам PWM на roboRIO.2 \)) красный провод и затяните клемму.
Подключите двухконтактный разъем к порту RSL на roboRIO. Черный провод должен быть ближе всего к внешней стороне roboRIO.
Зачистите красный и черный провода (или белый и зеленый провода) от контроллера (белый провод SPARK MAX не используется для щеточных двигателей, таких как CIM, он должен быть закреплен, а конец должен быть изолирован, например, изолентой или другой метод утепления).
Подключите провода двигателя к соответствующим выходным проводам контроллера (для контроллеров с белым / зеленым цветом подключите красный к белому и зеленый к черному). На изображениях выше показан пример использования быстроразъемных клемм, которые имеются в Rookie KOP.
Обожмите кольцевую / вилочную клемму на каждом из проводов двигателя.
Подсоедините провода к выходной стороне контроллера мотора (красный к +, черный к -)
Начните с аккумулятора и убедитесь, что красный провод подключен к положительной клемме
Убедитесь, что красный провод проходит через главный выключатель и к плюсовой клемме PDP, а черный провод идет прямо к минусовой клемме.
Для каждого контроллера мотора убедитесь, что красный провод идет от красной клеммы PDP к красному проводу на Victor SPX (не белый M + !!!!)
Для каждого устройства на конце плазменной панели убедитесь, что красный провод подсоединен к красной клемме на плазменной панели и красной клемме на компоненте.
Убедитесь, что оранжевый пассивный кабель PoE подключен непосредственно к радио, а не к roboRIO! Его необходимо подключить к roboRIO с помощью дополнительного кабеля Ethernet.
- ключ
Down (keyorcode: string | number, time ?: number, eventprops ?: ObjectData): void Параметры
ключевой код: строка | число
Дополнительное время: номер
Необязательные свойства события: ObjectData
Возврат недействителен
- ключ
Up (keyorcode: string | number, time ?: number, eventprops ?: ObjectData): void Параметры
ключевой код: строка | число
Дополнительное время: номер
Необязательные свойства события: ObjectData
Возврат недействителен
- мышь
Вниз (x: число, y: число, время ?: число, свойство события ?: ObjectData): void Параметры
x: число
у: номер
Дополнительное время: номер
Необязательные свойства события: ObjectData
Возврат недействителен
- мышь
Move (x: number, y: number, time ?: number, eventprops ?: ObjectData): void Параметры
x: число
у: номер
Дополнительное время: номер
Необязательные свойства события: ObjectData
Возврат недействителен
- мышь
Up (x: число, y: число, время ?: число, eventprops ?: ObjectData): void Параметры
x: число
у: номер
Дополнительное время: номер
Необязательные свойства события: ObjectData
Возврат недействителен
- мышь
Колесо (дельта: число, время ?: число, свойство события ?: ObjectData): void Параметры
дельта: номер
Дополнительное время: номер
Необязательные свойства события: ObjectData
Возврат недействителен
Питание радиостанции и Ethernet
Предупреждение
НЕ ПОДКЛЮЧАЙТЕ кабель пассивного инжектора Rev PoE напрямую к roboRIO. RoboRIO ДОЛЖЕН подключиться к гнезду кабеля с помощью дополнительного кабеля Ethernet, как показано на следующем шаге.
Требуется: малая плоская отвертка (опция), кабель Rev. Radio PoE
roboRIO к радио Ethernet
Требуется: кабель Ethernet
Подключите Ethernet-кабель к гнезду RJ45 (Ethernet) кабеля Rev Passive POE и к порту RJ45 (Ethernet) на roboRIO.
Устройства CAN
roboRIO для PCM CAN
Требуется: инструмент для зачистки проводов, небольшая плоская отвертка (опция), витой CAN-кабель желто-зеленого цвета
PCM к PDP CAN
Требуется: инструмент для зачистки проводов, небольшая плоская отвертка (опция), витой CAN-кабель желто-зеленого цвета
Кабели для ШИМ
В этом разделе подробно описано, как подключить контроллеры SPARK MAX с использованием сигналов ШИМ. Это рекомендуемая отправная точка, поскольку она менее сложна и легче устраняет неисправности, чем работа CAN. SPARK MAX (и многие другие контроллеры двигателей FRC) также могут быть подключены с помощью CAN, что обеспечивает более простую настройку, расширенные функции, лучшие диагностические данные и сокращает количество необходимых проводов.
Требуется: 4 адаптера PWM SPARK MAX (при использовании SPARK MAX), 4 кабеля PWM (если контроллеры без встроенных проводов или адаптеров, в противном случае необязательно), 2 Y-кабеля PWM (дополнительно)
Вариант 1 (прямое подключение):
Вариант 2 (Y-образный кабель):
Подсказка
Вы можете временно закрепить RSL на плате управления с помощью кабельных стяжек или Dual Lock (рекомендуется переместить RSL в более видимое место по мере создания робота)
Автоматические выключатели
Требуется: 4 автоматических выключателя на 40 А
Вставьте автоматические выключатели на 40 А в положения на PDP, соответствующие разъемам Wago, к которым подключены Talons.Обратите внимание, что для всех выключателей выключатель соответствует ближайшей положительной (красной) клемме (см. Рисунок выше). Все отрицательные клеммы на плате имеют внутреннее прямое соединение.
Если вы работаете с роботом Quick Build, остановитесь здесь и вставьте плату в шасси робота, прежде чем продолжить.
Мощность двигателя
Требуются: устройство для зачистки проводов, устройство для обжима проводов, крестовая отвертка, оборудование для подключения проводов
Для каждого двигателя CIM:
Для интегрированных проводных контроллеров, включая SPARK MAX (верхнее изображение):
Для SPARK или других контроллеров без встроенного провода (нижнее изображение):
СТОП
Опасность
Перед тем, как вставить аккумулятор в розетку, убедитесь, что все соединения были выполнены с соблюдением полярности.В идеале попросите кого-нибудь, кто не подключал робота, проверить правильность всех подключений.
Перед тем, как вставить аккумулятор в розетку, убедитесь, что все соединения были выполнены с соблюдением полярности. В идеале попросите кого-нибудь, кто не подключал робота, проверить правильность всех подключений.
Подсказка
Также рекомендуется поставить робота на блоки, чтобы колеса не касались земли, прежде чем продолжить. Это предотвратит опасное любое неожиданное движение.
Управление проводами
Требуется: Застежки-молнии
Подсказка
Теперь, возможно, самое подходящее время добавить несколько стяжек для закрепления некоторых проводов, прежде чем продолжить. Это поможет сохранить аккуратность электропроводки робота.
Подключите аккумулятор
Подключите аккумулятор к разъему Андерсона со стороны робота.Включите робота, переместив рычаг наверху главного прерывателя 120A в выступ наверху корпуса.
Если что-то мигает, вероятно, вы все сделали правильно.
Прежде чем двигаться дальше, при использовании контроллеров SPARK MAX необходимо выполнить еще один шаг настройки. Контроллеры двигателей SPARK MAX по умолчанию настроены для управления бесщеточным двигателем. Вы можете убедиться в этом, убедившись, что индикатор на контроллере мигает голубым или пурпурным цветом (указывая на бесщеточный тормоз или бесщеточный выбег соответственно).Чтобы перейти в щеточный режим, нажмите и удерживайте кнопку режима в течение 3-4 секунд, пока индикатор состояния не изменит цвет. Светодиод должен измениться на синий или желтый, показывая, что контроллер находится в щеточном режиме (торможение или выбег соответственно). Чтобы изменить режим торможения или выбег, который определяет, насколько быстро двигатель замедляется при подаче сигнала нейтрали, нажмите кнопку режима кратковременно.
Подсказка
Для получения дополнительной информации о контроллерах двигателей SPARK MAX, в том числе о том, как тестировать двигатели / контроллеры без написания кода с помощью аппаратного клиента REV, см. Руководство по быстрому запуску SPARK MAX.
Отсюда вы должны подключиться к roboRIO и попробовать загрузить свой код!
Роботытеперь могут читать схемы с инструкциями
Роботы, наделенные определенным здравым смыслом, вскоре могут следовать инструкциям по построению вещей.
Изучая рисунки для сборки мебели из IKEA или деревень LEGO, люди, естественно, хорошо понимают, как добраться из пункта А в пункт Б. С другой стороны, роботов, как правило, нужно тщательно запрограммировать с точными инструкциями о том, как двигаться.«Даже когда вы пытаетесь научить роботов демонстрацией, они просто повторяют те же движения, которые вы им показываете, а не концепцию, лежащую в их основе», – говорит Дилип Джордж, исследователь искусственного интеллекта и нейробиологии из компании Vicarious AI из Сан-Франциско.
Подпишитесь на последние новости от
Science NewsЗаголовки и резюме последних научных новостей статей, доставленных на ваш почтовый ящик
Спасибо за регистрацию!
При регистрации возникла проблема.
Джордж и его коллеги разработали операционную систему для роботов, которая может понимать основные идеи, изложенные в схематических инструкциях, и воплощать их в жизнь. Эти роботы с здравым смыслом, описанные в Интернете 16 января в Science Robotics , могут работать над более широким спектром задач в других условиях, чем машины, ограниченные явно кодированными инструкциями или физическими демонстрациями.
Новая роботизированная система изучила более 500 общих понятий, таких как «складывать зеленые объекты справа» и «располагать объекты по кругу», изучая изображения до и после каждого типа действия.Получив новый набор инструкций с диаграммой до и после, полностью обученная система рассматривает все изученные концепции, выбирает и выполняет маневры, которые помогут ей достичь своей цели.
Команда Джорджа протестировала операционную систему на двух роботах-захватах, которые перемещали объекты по поверхности стола. Роботы изучили графические инструкции, а затем выполнили задачи, такие как отделение лимона от лайма и выстраивание разноцветных банок в ряд. Машины также хорошо работали, когда исследователи меняли такие условия, как тип перемещаемых объектов или цвет поверхности стола.
Робот | GoJS API
Это расширение, а не часть основной библиотеки GoJS.
Обратите внимание, что API для этого класса может измениться в любое время.
Если вы собираетесь использовать расширение в производственной среде, вам следует скопировать код в свой собственный исходный каталог.
Расширения можно найти в комплекте GoJS в папках extensions или extensionsTS .
См. Вступительную страницу расширений для получения дополнительной информации.
