
Улучшенный ШИ регулятор на TL494
Вернуться в раздел электроники
Улучшенный ШИМ контроллер на TL494
Автор статьи: Токмаков Н.М., Сыктывкар, 2011г.
Статья продолжает тему создания устройств управления мощными электродвигателями. В данном случае рассматривается
устройство для управления электродвигателем с напряжением питания 24 вольта и мощностью до 2-х киловатт. Но регулятор можно применить и для других напряжений и
мощностей, для этого его требуется дополнить устройством понижения напряжения питания электронной части, а транзисторы заменить на другие подходящие
по мощности и допустимым напряжениям и токам. Выходной каскад устройства способен управлять десятком указанных на схеме транзисторов.
Ранее на сайте уже размещена схема ШИМ регулятора оборотов коллекторного электродвигателя на микросхеме TL494, но как оказалось она имеет недостаток связанный с неполным диапазоном регулирования мощности. Терялось около 4-5% мощности двигателя. Упоминаемую статью можно посмотреть ЗДЕСЬ . Новая схема несколько доработана.
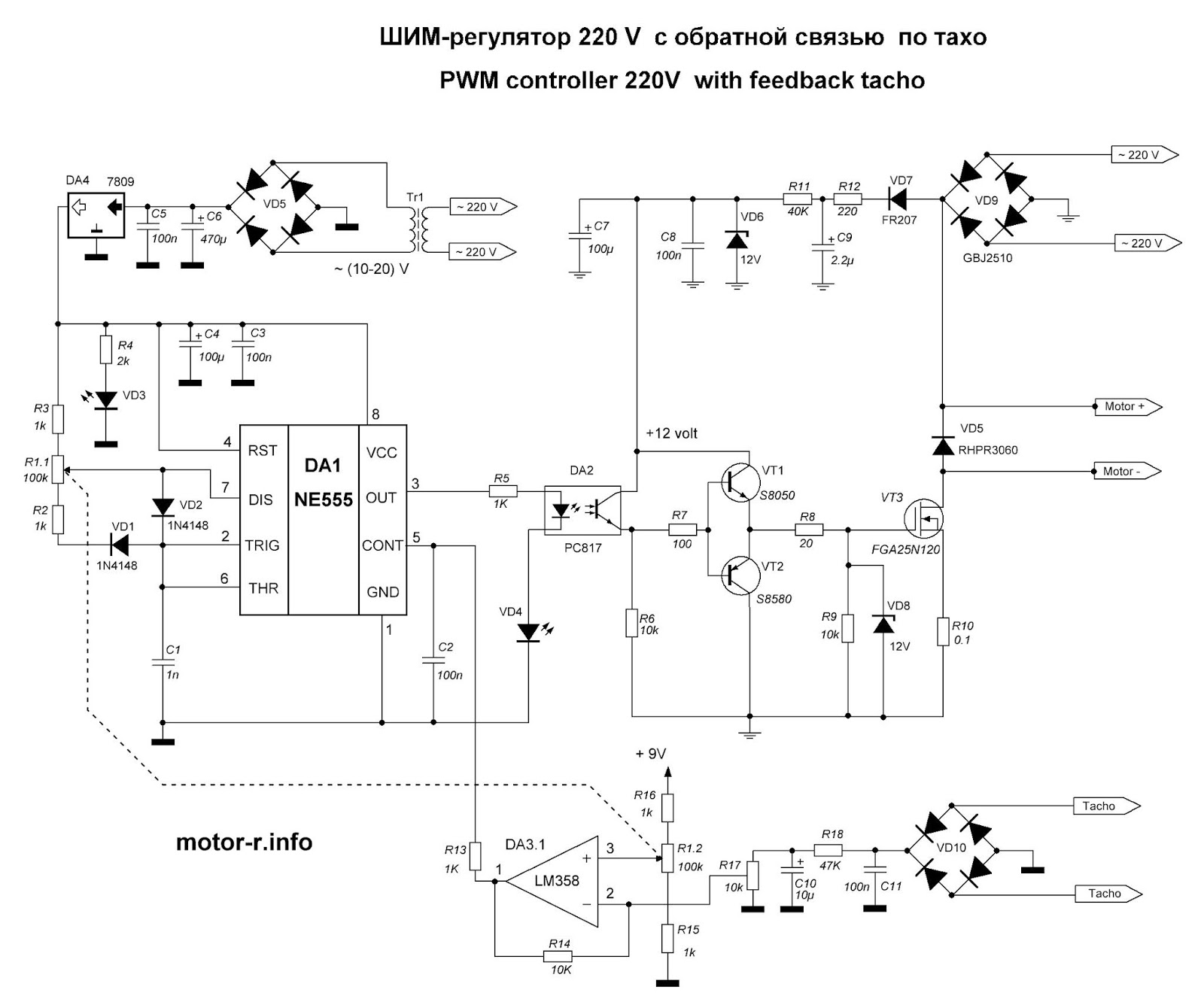
Принципиальная схема регулятора:
Верхнее положение задатчика оборотов соответствует отсутствию управляющих импульсов. Нижнее положение – максимальной
мощности. Резисторами R3 и R1 можно изменить сектор работы рабочего органа потенциометра.
Схема разрабатывалась и испытывалась на электротрайке с напряжением тяговой батареи 24 вольта. Поэтому некоторые элементы
расчитаны на питание от 24 вольт, в частности узел питания на интегральном стабилизаторе DA1. При использовании более высокого напряжения необходимо
позаботиться о понижении питания до разумной величины (30-18 вольт) или запитать от отдельной батареи аккумуляторов.
В качестве главного управляющего элемента устройства используется микросхема типа TL494CN, выпускаемая фирмой TEXAS
INSTRUMENT (США). Она выпускается рядом зарубежных фирм под разными наименованиями. Например,
фирма SHARP (Япония) выпускает микросхему IR3M02, фирма FAIRCHILD (США) –
иА494, фирма SAMSUNG (Корея) – КА7500, фирма FUJITSU (Япония) – МВ3759, есть ещё mPC494,TL493,TL495,TL594 и
т.д. Все эти микросхемы являются полными аналогами отечественной микросхемы КР1114ЕУ4 (М1114ЕУ4,K1006EУ4).
TL594 – аналог TL494 c улучшенной точностью усилителей ошибки и компаратора.
TL598 – аналог TL594 c двухтактным (pnp-npn) повторителем на выходе.
Плюсы:
Развитые цепи управления, два
дифференциальный усилителя (могут выполнять и логические функции)
Минусы:
Однофазные выходы требуют
дополнительной обвески (по сравнению с UC3825). Недоступно токовое
управление, относительно медленная петля обратной связи. Синхронное
включение двух и более ИС не так удобно, как в UC3825.
Не будем подробно рассматривать устройство и работу этой
управляющей микросхемы. ЗДЕСЬ можно посмотреть статью c описанием работы
микросхемы.
Разводка печатной платы регулятора:
На рисунке должно быть все понятно. Размер печатной платы из одностороннего фольгированного стеклотекстолита
63 х 71 мм. Обратите внимание: дорожки питания разведены таким образом, что силовая и управляющая части запитаны отдельными проводниками.
Это принципиально.
Поставлена цель иметь максимально упрощенный ШИ регулятор для ДТП, поэтому ограничимся именно таким построением схемы устройства.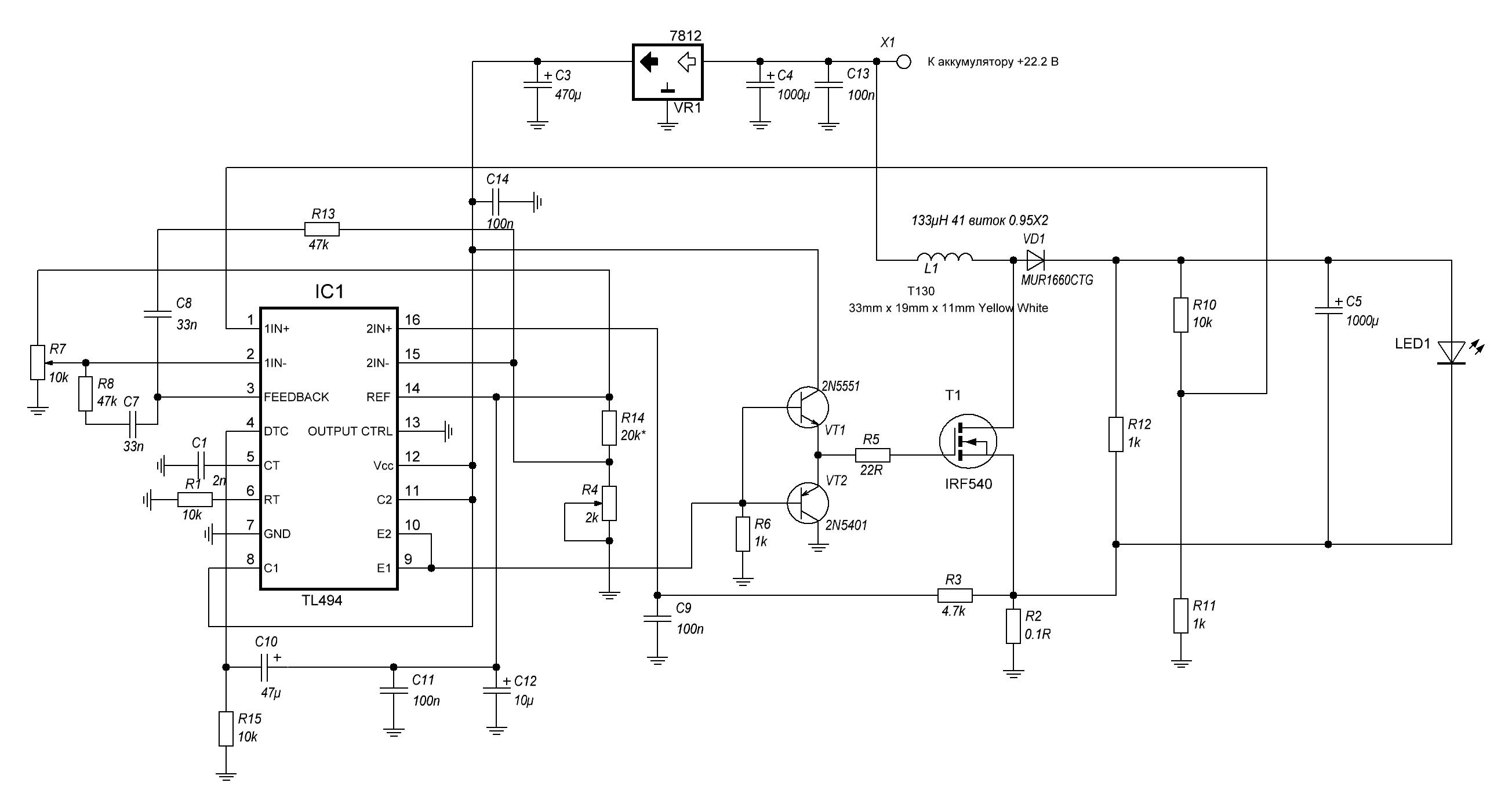 Это позволит
подобрать необходимые детали даже в дали от крупных городов. Микросхема TL494 широко применяется в блоках питания компьютеров, поэтому её найти не
составит труда. При аккуратной сборке выходные импульсы должны иметь такой вид выходного сигнала с формирователя импульсов:
Это позволит
подобрать необходимые детали даже в дали от крупных городов. Микросхема TL494 широко применяется в блоках питания компьютеров, поэтому её найти не
составит труда. При аккуратной сборке выходные импульсы должны иметь такой вид выходного сигнала с формирователя импульсов:
При самостоятельной разводке печатной платы транзисторы VT2 и VT3 следует ставить ближе к источнику питания, а между эмиттерами транзисторов
установить керамический конденсатор в непосредственно близости к ним.
Силовой модуль, куда входят резисторы R11-R15, транзисторы VT4-VT7, диод VD2 изготавливается отдельно с тщательным соблюдением требований к силовым
устройствам. А диод VD2 вообще рекомендую ставить вблизи электродвигателя или на его клеммы, снабдив небольшим радиатором с площадью пластин 30-50 кв.см.
Обратите внимание на подвод токосьемных проводников. После запаивания транзисторов и резисторов, надо уделить особое внимание
прокладке электрических проводов.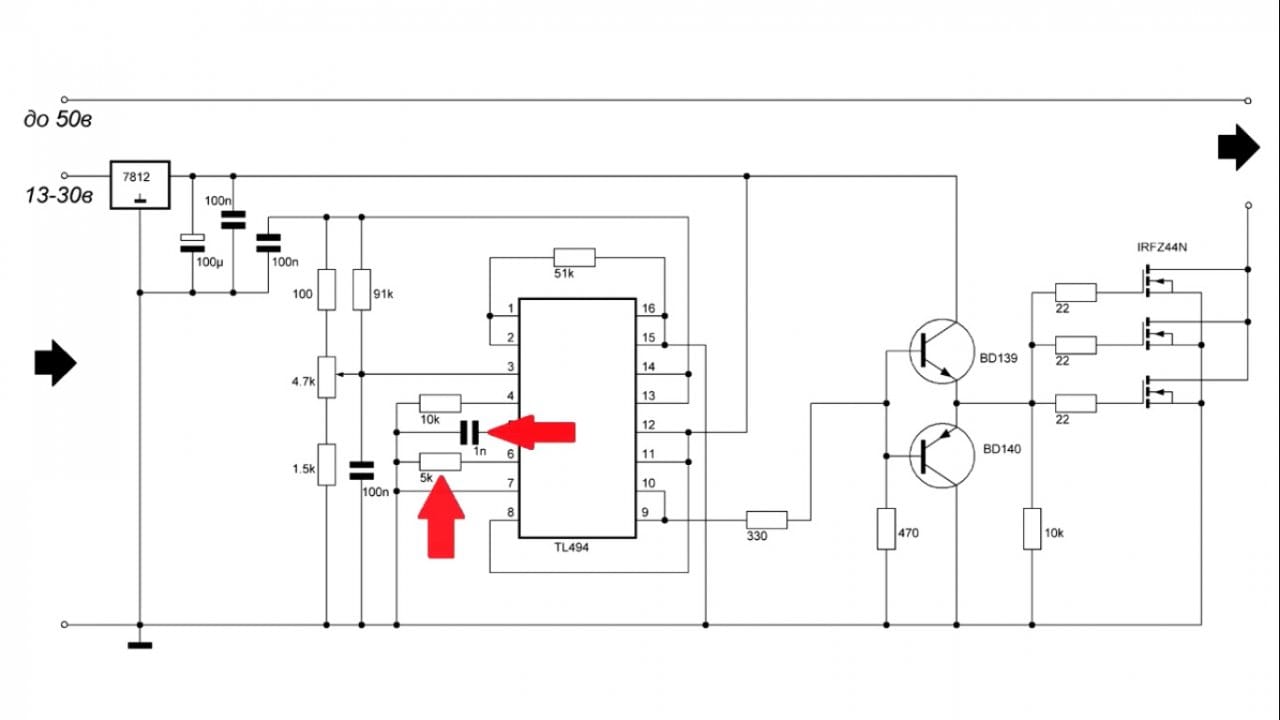 Необходимо проложить медные жилы непосредственно до выводов транзисторов. И чем толще, тем лучше. Удельные сопротивления
припоя и меди различаются почти в десять раз. Поэтому в силовых цепях на припой как на проводник электричества расчитывать не следует. Он создает значительное
падение напряжения, что является причиной неравномерной загрузки силовых транзисторов и как следствие ведет к проблемам с качественной работой всего
устройства в целом.
Чтобы не быть голословным приведу удельные сопротивления: медь – 0.0175 Ом*мм2/м, припой – 0.167 Ом*мм2/м (олово-0.115, свинец-0.221)
Необходимо проложить медные жилы непосредственно до выводов транзисторов. И чем толще, тем лучше. Удельные сопротивления
припоя и меди различаются почти в десять раз. Поэтому в силовых цепях на припой как на проводник электричества расчитывать не следует. Он создает значительное
падение напряжения, что является причиной неравномерной загрузки силовых транзисторов и как следствие ведет к проблемам с качественной работой всего
устройства в целом.
Чтобы не быть голословным приведу удельные сопротивления: медь – 0.0175 Ом*мм2/м, припой – 0.167 Ом*мм2/м (олово-0.115, свинец-0.221)
Управляющий сигнал к силовому блоку подвести витым проводом и в центр сборки, а еще лучше для каждого транзистора свою витую пару, но это уже как
идеальный вариант.
Демпферный диод VD3 можно установить как в силовом блоке (если есть место) так и непосредственно на электродвигатель, либо по пути прокладки силовых кабелей.
Возможно для кого-то представит интерес следующая схема устройства регулятора.![]()
Устройтва не имеют собственной защиты от перегрузок и коротких замыканий, поэтому используйте амперметр для контроля тока в нагрузке.
На базе вышеуказанной схемы разработано устройтво с защитой по току в нагрузке.
Используя опыт изготовления ШИМ регуляторов двигателей постоянного тока для электромобилей, наш украинский коллега из п.Долина Иваново-Франковской области Александр Сорочка разработал и собрал действующий контроллер для электродвигателя. (кликнуть по рисунку для открытия в отдельном окне)
Схема разрабатывалась с помощью программы Splan v5.0, печатная плата программой SprintLayOut v4.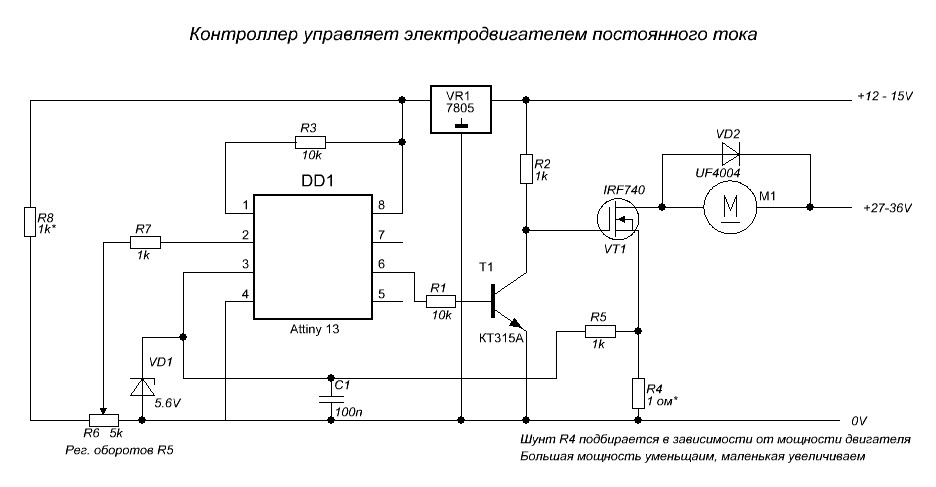
Для удобства работы с документацией предлагается возможность скачать исходные файлы СХЕМЫ и ЧЕРТЕЖА платы. Не лишне сообщить, что чертеж последней печатной платы возможно применить для изготовления всех устройств представленных в статье, просто некоторые соединения выполнить перемычками через имеющиеся отверстия в плате.
Для управления драйвером (ШИМ регулятором) традиционно применяю датчик положения дроссельной заслонки типа 39.3855 от ВАЗовских автомобилей.
Он устроен не совсем так как хотелось бы. Была попытка разобрать его и усовершенствовать. Разобрать удалось, но усовершенствовать не представляется возможным.
Может быть кому-то удастся это сделать. Вот его конструкция (по контуру крышки залит компаунд, он легко колется резаком):
После сборки крышечку залить селиконовым герметиком, излишки удалить до высыхания.

Вернуться в раздел электроники, к другим схемам ШИМ
Радиосхемы. – ШИМ-регулятор на простой логике
Схемы источников питания
материалы в категории
Необходимость регулировки постоянного напряжения для питания мощных инерционных нагрузок чаще всего возникает у владельцев автомобилей и другой авто-мото техники. Например, появилось желание плавно менять яркость ламп освещения салона, габаритных огней, автомобильных фар или вышел из строя узел регулирования оборотов вентилятора автомобильного кондиционера, а замены нет.
Осуществить такое желание иногда нет возможности из-за большого тока потребления этими устройствами – если устанавливать транзисторный регулятор напряжения, компенсационный или параметрический, на регулирующем транзисторе будет выделяться очень большая мощность, что потребует установки больших радиаторов или введения принудительного охлаждения с помощью малогабаритного вентилятора от компьютерных устройств.
Выходом из положения является применение широтно – импульсных схем, управляющих мощными полевыми силовыми транзисторами MOSFET. Эти транзисторы могут коммутировать очень большие токи ( до 160А и более) при напряжении на затворе 12 – 15 В. Сопротивление открытого транзистора очень мало, что позволяет заметно снизить рассеиваемую мощность. Схемы управления должны обеспечивать разность напряжений между затвором и истоком не менее 12 … 15 В, в противном случае сопротивление канала сильно увеличивается и рассеиваемая мощность значительно возрастает, что может привести перегреву транзистора и выходу его из строя. Для широтно – импульсных автомобильных низковольтных регуляторов выпускаются специализированные микросхемы , например U6080B … U6084B, L9610, L9611, которые содержат узел повышения выходного напряжения до 25 -30 В при напряжении питания 7 -14 В, что позволяет включать выходной транзистор по схеме с общим стоком, чтобы можно было подключать нагрузку с общим минусом, но достать их практически невозможно.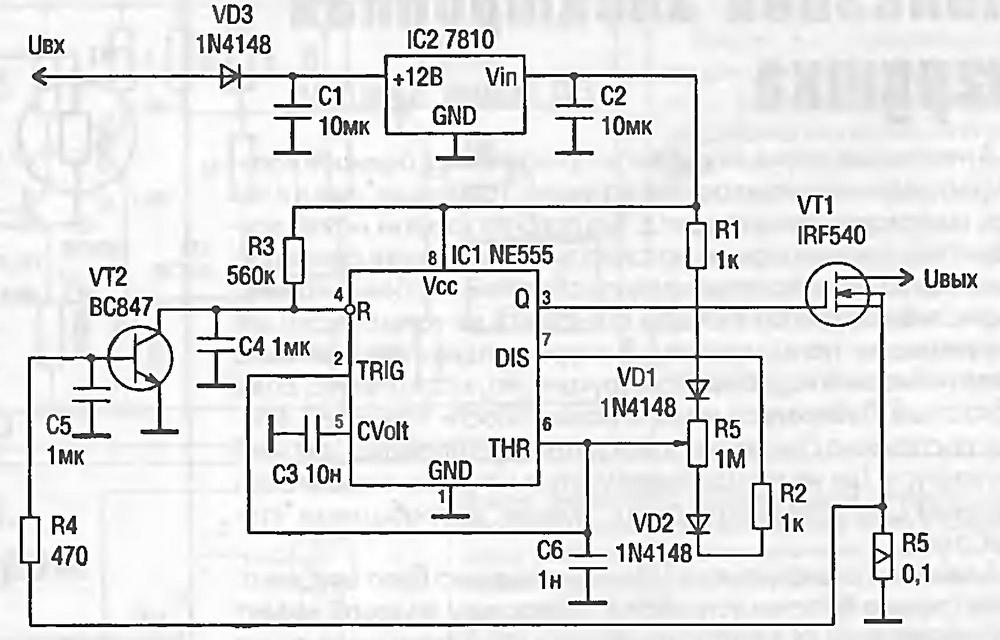
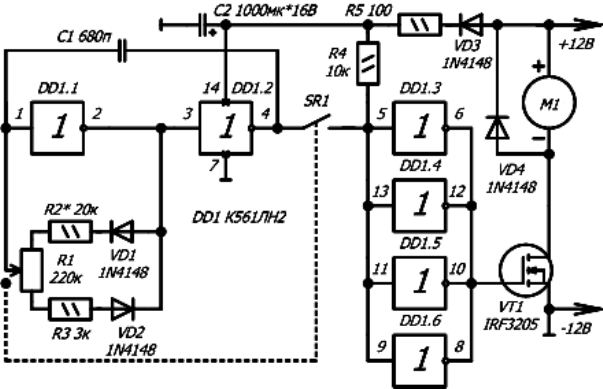
Первый ШИМ регулятор собран на инверторах логической КМОП микросхемы. Схема представляет собой генератор прямоугольных импульсов на двух логических элементах, в котором за счёт диодов раздельно меняется постоянная времени заряда и разряда частотозадающего конденсатора, что позволяет изменять скважность выходных импульсов и значение эффективного напряжения на нагрузке.
В схеме можно использовать любые инвертирующие КМОП элементы, например К176ПУ2, К561ЛН1, а также любые элементы И, ИЛИ-НЕ, например К561ЛА7, К561ЛЕ5 и подобные, соответственно сгруппировав их входы. Полевой транзистор может быть любым изMOSFET, которые выдерживают максимальный ток нагрузки, но желательно использовать транзистор с как можно большим максимальным током, т.к. у него меньшее сопротивление открытого канала, что уменьшает рассеиваемую мощность и позволяет использовать радиатор меньшей площади.
Достоинство ШИМ-регулятора на микросхеме К561ЛН2 – простота и доступность элементов,
недостатки – диапазон изменения выходного напряжения чуть меньше 100% и невозможно доработать схему с целью введения дополнительных режимов, например плавного автоматического увеличения или понижения напряжения на нагрузке, т.к. регулирование производится путём изменения сопротивления переменного резистора , а не изменением уровня управляющего напряжения.
Гораздо лучшими характеристиками обладает вторая схема, но количество элементов в ней чуть больше.
Регулировка эффективного значения напряжения на нагрузке от 0 до 12 В производится изменением напряжения на управляющем входе от 8 до 12 В. Диапазон регулировки напряжения практически 100%. Максимальный ток нагрузки полностью определяется типом силового полевого транзистора и может быть очень значительным. Так как выходное напряжение пропорционально входному управляющему напряжению, схема может использоваться как составная часть системы регулирования , например системы поддержания заданной температуры, если в качестве нагрузки использовать нагреватель, а датчик температуры подключить к простейшему пропорциональному регулятору, выход которого подключается к управляющему входу устройства.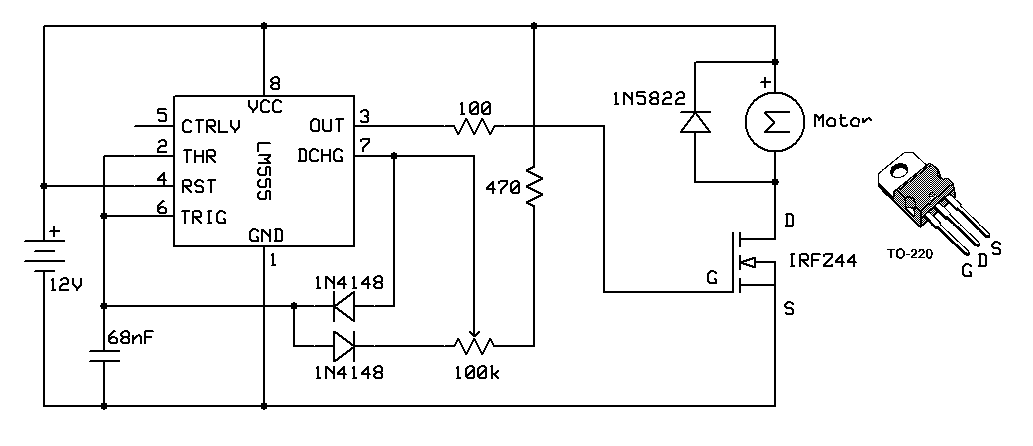 Описанные устройства имеют в основе несимметричный мультивибратор, но ШИМ регулятор можно построить на микросхеме ждущего мультивибратора
Описанные устройства имеют в основе несимметричный мультивибратор, но ШИМ регулятор можно построить на микросхеме ждущего мультивибратора
Автор Кравцов В.Н. http://kravitnik.narod.ru
Обсудить на форуме
Мощный ШИМ регулятор своими руками
Приветствую, Самоделкины!
Совсем недавно Роману, автору YouTube канала «Open Frime TV», понадобился мощный ШИМ-регулятор. Начались поиски и проверки разных схем. В итоге он остановился на данном варианте:
Автор уже не однократно снимал ролики про шим-регуляторы, но на момент их создания не особо разбирался в схемотехнике, да и не было оборудования для того, чтобы полностью протестировать получившиеся устройства.
Теперь же у автора появился осциллограф, с помощью которого можно увидеть все косяки.
Давайте разберемся в ошибках, чтобы в дальнейшем их не допускать. Самая важная ошибка – это непонимание принципа работы полевого транзистора.
 Те, кто не первый год занимается электроникой знают, что для открытия полевика нужно не только напряжение, но некий ток.
Те, кто не первый год занимается электроникой знают, что для открытия полевика нужно не только напряжение, но некий ток.Это же касается и закрытия. Если этого тока недостаточно, то транзистор будет медленнее открываться и, следовательно, сильнее греться.
Нагрев мосфетов в ключевом режиме появляется именно в моменты переключения, и чем быстрее мы будем коммутировать транзистор, тем меньше он будет нагреваться. Большинство новичков этого не знают и поэтому, в некоторых схемах, силовой транзистор довольно сильно нагревается. У автора было точно также и на тот момент ему было непонятно почему так происходит.
Думаю, все кто искал схему шим-регулятора, натыкались на вариант с микросхемой ne555 и кучей транзисторов, но стоит заглянуть в ее datasheet и мы увидим максимальный выходной ток 200 мА.
Этого тока явно недостаточно для корректной работы устройства. Как же тогда собрать отличный шим-регулятор и уменьшить его нагрев? Все очень просто, необходимо на выход управляющей микросхемы поставить драйвер, который сможет обеспечить достаточный ток для открытия и закрытия мосфетов.
На осциллограммах четко видно, как переключается транзистор без драйвера и когда он есть. Тут даже невооруженным взглядом можно увидеть преимущества драйвера.
Теперь давайте взглянем на схему устройства:
Как видим, в качестве задающий микросхемы, автор применил TL494. Почему именно ее? Да потому, что она очень популярна и легка в настройке.
Автор также пробовал собирать ШИМ на Uc3843, но там есть свои особенности, которые затрудняют сборку. Делал и на 555-ой, но больше всего приглянулась именно 494-ая. В нее можно без особых проблем добавить ограничитель тока, но это уже будете делать под ваши нужды.
Теперь пару слов про работу схемы. TL494 генерирует прямоугольные импульсы, частота которых задается с помощью вот этого конденсатора и резистора:
Потом эти импульсы усиливаются драйвером и поступают на затворы транзисторов.
У каждого транзистора на затворе свой резистор. Это сделано с целью убрать звон при закрытии.
Так как это полевые транзисторы, то при параллельном включении им не нужны токоограничивающие резисторы, что повышает КПД схемы. Также на схеме можем видеть 2 входных напряжения.
Это сделано с целью расширения пределов работы самого шим-регулятора. Если входное напряжение находится в районе 13-30В, то можно установить перемычку и питать схему одним напряжением.
Также нужно сказать пару слов про транзисторы.
IRFZ44N рассчитан на напряжение 50В.
Если вам нужно управлять более высоким напряжением, то необходимо заменить транзисторы под ваши параметры. К примеру, IRF540 рассчитаны уже на напряжение 100В.
Со схемой закончили, рассмотрим печатную плату.
Тут в глаза бросаются силовые дорожки. Они не очень большие, но все компенсируется после сборки устройства. Их придется пропаять медным проводом для повышения токопроводимости. Это будет лучшим решением, так как делать саму дорожку еще больше нету смысла, она имеет маленькое сечение и не сможет провести большой ток.
С платой тоже разобрались. Давайте ее соберем. Это не составит трудностей, деталей немного и сложность минимальная.
э
С обратной стороны пропаяли силовые дорожки. Теперь необходимо установить транзисторы на радиатор, вы же не думаете, что мы полностью избавились от нагрева.
При установке можно не использовать изолирующие подложки, так как транзисторы включены параллельно.
С таким радиатором можно коммутировать токи до 20А. При б0льших токах требуется б0льший радиатор.
Ну и в конце можно производить тесты. Подаем напряжение на схему (в данном случае оно составляет 28В) и производим включение.
Для начала подключаем 2 лампы накаливания мощностью 100Вт, рассчитанные на напряжение 36В.
Но это такое, детский сад, схема справляется на раз-два. Теперь можно взять нагрузку помощнее, к примеру, вот такую нихромовую спираль.
Как видим ток идет довольно таки большой, но схема держится молодцом. Саму плату автор собирал одному человеку для мощного двигателя постоянного тока.
 Пока жалоб не было, поэтому можно советовать ее к повторению. Ну а на этом все. Благодарю за внимание. До новых встреч!
Пока жалоб не было, поэтому можно советовать ее к повторению. Ну а на этом все. Благодарю за внимание. До новых встреч!Видео:
Источник (Source) Становитесь автором сайта, публикуйте собственные статьи, описания самоделок с оплатой за текст. Подробнее здесь.
Мощный ШИМ регулятор
Очередное электронное устройство широкого применения.Представляет собой мощный ШИМ (PWM) регулятор с плавным ручным управлением. Работает на постоянном напряжении 10-50V (лучше не выходить за диапазон 12-40V) и подходит для регулирования мощности различных потребителей (лампы, светодиоды, двигатели, нагреватели) с максимальным током потребления 40А.
Прислали в стандартном мягком конверте
Корпус скрепляется на защёлках, которые легко ломаются, поэтому вскрывать аккуратно.
Внутри плата и снятая ручка регулятора
Печатная плата — двусторонний стеклотекстолит, пайка и монтаж аккуратные. Подключение через мощный клеммник.
Вентиляционные прорези в корпусе малоэффективны, т.к. почти полностью перекрываются печатной платой.
В собранном виде выглядит примерно так
Реальные размеры чуть больше заявленных: 123x55x40мм
Принципиальная электрическая схема устройства
Заявленная частота ШИМ 12kHz. Реальная частота изменяется в диапазоне 12-13kHz при регулировании выходной мощности.
При необходимости, частоту работы ШИМ можно уменьшить, подпаяв нужный конденсатор параллельно С5 (исходная ёмкость 1nF). Увеличивать частоту нежелательно, т.к. увеличатся коммутационные потери.
Переменный резистор имеет встроенный выключатель в крайнем левом положении, позволяющий отключать устройство. Также на плате расположен красный светодиод, горящий в рабочем состоянии регулятора.
С микросхемы ШИМ контроллера маркировка зачем-то старательно затёрта, хотя нетрудно догадаться, что стоит аналог NE555 🙂
Диапазон регулирования близок к заявленным 5-100%
Элемент CW1 похож на стабилизатор тока в корпусе диода, но точно не уверен…
Как и на большинстве регуляторов мощности, регулирование осуществляется по минусовому проводнику. Защита от КЗ отсутствует.
Защита от КЗ отсутствует.
На мосфетах и диодной сборке маркировка изначально отсутствует, они стоят на индивидуальных радиаторах с термопастой.
Регулятор может работать на индуктивную нагрузку, т.к. на выходе стоит сборка защитных диодов Шоттки, подавляющая ЭДС самоиндукции.
Проверка током 20А показала, что радиаторы греются незначительно и могут вытянуть больше, предположительно до 30А. Измеренное суммарное сопротивление открытых каналов полевиков всего 0,002 Ом (падает 0,04В на токе 20А).
Если снизить частоту ШИМ, вытянут все заявленные 40А. Жаль проверить не смогу…
Выводы можете сделать сами, мне устройство понравилось 🙂
Регулятор оборотов шуруповерта и схема его элементов
В этой статье мы рассмотрим устройство шуруповерта. Уделим особое внимание таким ответственным деталям в конструкции, как регулятор оборотов шуруповерта. Кроме того, разберемся, как устроен регулятор усилия шуруповерта. Подробно опишем процесс изготовления регулятора оборотов своими руками, а также ознакомимся с такой функцией шуруповерта, как автоматическая регулировка оборотов.
Регулятор оборотов шуруповерта
Электрический шуруповерт работает либо от сети 220 В, либо от аккумуляторной батареи. Его мощность зависит от величины напряжения аккумулятора. Скорость вращения шуруповерта начинается от 15 000 об/мин. Кроме того, шуруповерт, который работает от сети, имеет 2 скорости вращения: более медленную для вкручивания, более высокую для сверления. Внутри кнопки подачи питания располагается регулятор оборотов. Довольно миниатюрный размер этого узла инструмента достигается при помощи микропленочной технологии. Его основной деталью является симистор. Принцип работы регулятора следующий:
- При включении кнопки на управляющий электрод симистора подается переменный ток, имеющий синусоидальную фазу.
- Происходит открытие симистора, ток начинает проходить через нагрузку.
Время срабатывания симистора зависит от амплитуды управляющего напряжения.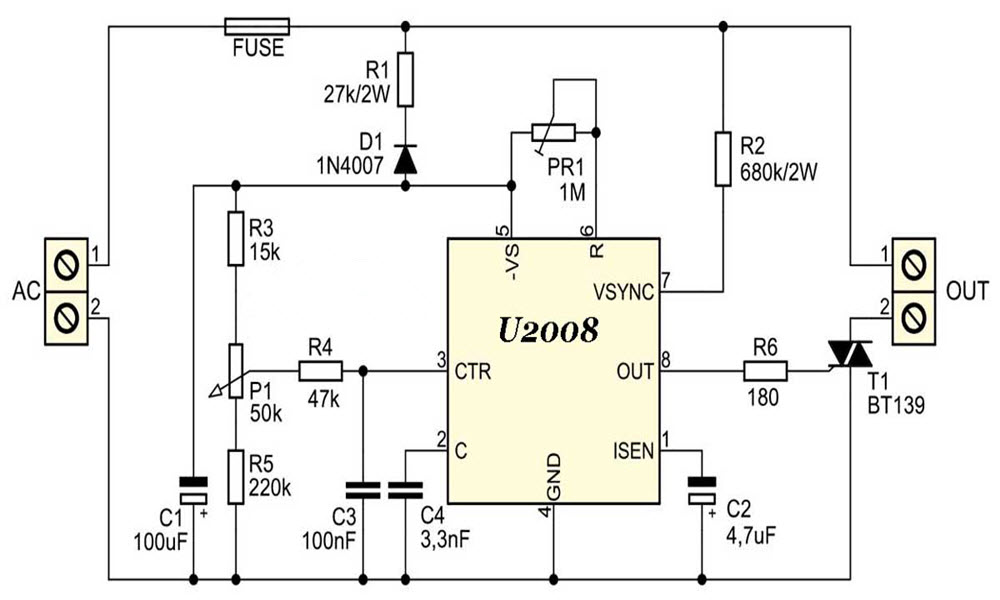 Чем больше амплитуда, тем раньше происходит срабатывание симистора. Величина амплитуды задается при помощи переменного резистора, соединенного с кнопкой пуска. Схема подключения кнопки отличается в разных моделях. К регулятору оборотов возможно подключение конденсатора.
Чем больше амплитуда, тем раньше происходит срабатывание симистора. Величина амплитуды задается при помощи переменного резистора, соединенного с кнопкой пуска. Схема подключения кнопки отличается в разных моделях. К регулятору оборотов возможно подключение конденсатора.
Зачастую в нынешних экономических условиях не всегда покупатель может себе позволить полноценный дорогой шуруповерт от именитых фирм. В более дешевых моделях такой функции может и не быть. Но это не повод отчаиваться. Регулятор оборотов можно собрать самостоятельно, о чем мы и поговорим ниже.
Регулятор оборотов шуруповерта собирается на основе ШИМ – контроллера и ключевого многоканального полевого транзистора. Управление работой этого узла инструмента осуществляет резистор. Его положение зависит от давления на кнопку пуска шуруповерта.
Направление вращения рабочего органа меняется путем смены полюсов напряжения, которое подается на щетки двигателя. Инструментально это осуществляется при помощи перекидных контактов, приводящихся в действие рычажком реверса.
Собрать такой регулятор возможно своими руками. Как это сделать, мы рассмотрим ниже.
Схема элементов, входящих в состав регулятора оборотов, представлена на рисунке ниже.
Схема
В данном случае используется микросхема сдвоенного компаратора LM 393. Здесь первый компаратор работает как генератор пилообразного напряжения, на втором выполнена ШИМ. Сигналом управления для ШИМ служит падение напряжения на контактах двигателя. Если говорить упрощенно, то на схеме электродвигатель выглядит как активное и индуктивное сопротивления, соединенные последовательно между собой. При изменении нагрузки изменяется соотношение этих сопротивлений соответственно, регулятор же контролирует это и меняет заполнение ШИМ, тем самым стабилизируя обороты.
В качестве источника питания для ШИМ следует использовать электронный трансформатор. Он представляет собой полумостовой преобразователь напряжения из 220 в 12 В, который используется для питания галогеновых ламп освещения.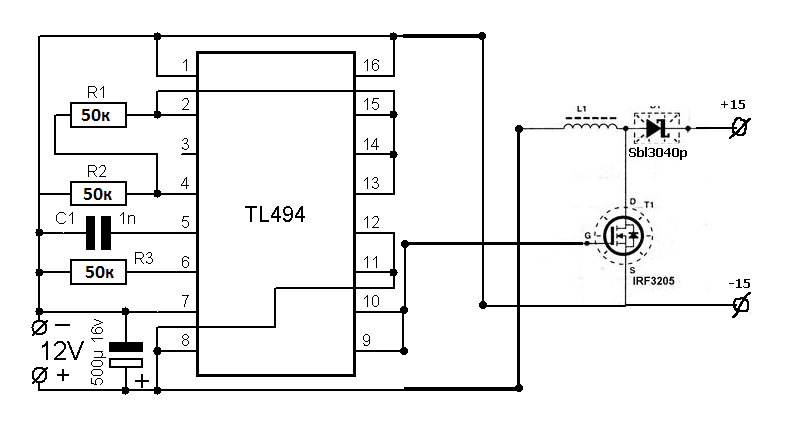 Его размеры сопоставимы с размерами спичечного коробка. Цена колеблется в пределах 2–3 у. е. К нему необходимо добавить выпрямитель на выход (это четыре диода, к примеру, КД 213), а также конденсатор емкостью в несколько тысяч микрофарад на 25 вольт. Все это будет составлять импульсный источник питания с постоянным напряжением на выходе.
Его размеры сопоставимы с размерами спичечного коробка. Цена колеблется в пределах 2–3 у. е. К нему необходимо добавить выпрямитель на выход (это четыре диода, к примеру, КД 213), а также конденсатор емкостью в несколько тысяч микрофарад на 25 вольт. Все это будет составлять импульсный источник питания с постоянным напряжением на выходе.
Отдельно стоит поговорить об изготовлении печатной платы для регулятора. Для ее изготовления необходим лист фотобумаги, лазерный принтер. Сначала необходимо напечатать рисунок на фотобумаге с помощью лазерного принтера, затем перенести его на заготовку платы с помощью нагретого утюга. Заготовка платы с прилепившейся бумагой ложится в емкость и подставляется под струю горячей воды. Это делается для того, чтобы желатиновый слой фотобумаги набух, и она отлепилась от платы. Оставшийся рисунок на плате протравливается хлорным железом.
Регулятор усилия шуруповерта
Регулятор усилия представляет собой муфту, ограничивающую усилие при вращении патрона. Она выполнена в виде вращающегося пластикового барабана. Величина ее затяжки регулируется с помощью цифровой шкалы, размещенной по окружности барабана. Увеличивая величину затяжки, тем самым вы глубже ввинчиваете саморез.
Эта функция будет необходима при работе с материалом изделий различной степени твердости, поскольку при работе с мягким материалом тело самореза будет легко утапливаться в нем, слишком высокая твердость материала будет способствовать нарушению геометрии шурупа, особенно если он небольших размеров. Трещотка, как еще называют регулятор, предотвращает срезание шлицев у саморезов, а также износ насадок шуруповерта. Затягивать регулировочное кольцо следует поэтапно начиная с самого небольшого усилия. В тех шуруповертах, в которых возможно производить сверление, последняя пиктограмма на кольце будет в виде сверла. В этой позиции достигается максимальный крутящий момент.
Электронная регулировка частоты вращения шуруповерта
Регулировать скорость вращения насадки шуруповерта возможно механически или автоматически. Автоматическая регулировка оборотов происходит при помощи процессора. Задать нужные параметры работы можно при помощи тумблера выбора скорости. Он расположен сверху корпуса. Во многих моделях регулировка оборотов реализована через кнопку пуска. Чем сильнее давление пальца на нее, тем выше будут обороты.
Прочитав эту статью, вы получили информацию о том, как собрать регулятор оборотов шуруповерта своими руками, ознакомились с конструкцией регулятора усилия, разобрались с функцией электронной регулировки инструмента. Надеемся, статья была вам полезной.
Шим регулятор напряжения и тока своими руками
Эта самодельная схема может быть использована в качестве регулятора скорости для двигателя постоянного тока 12 В с номинальным током до 5 А или как диммер для 12 В галогенных и светодиодных ламп мощностью до 50 Вт. Управление идёт с помощью широтно-импульсной модуляции (ШИМ) при частоте следования импульсов около 200 Гц. Естественно частоту можно при необходимости изменить, подобрав по максимальной стабильности и КПД.
Большинство подобных конструкций собирается по гораздо . Здесь же представляем более усовершенствованный вариант, который использует таймер 7555, драйвер на биполярных транзисторах и мощный полевой MOSFET. Такая схематика обеспечивает улучшенное регулирование скорости и работает в широком диапазоне нагрузки. Это действительно очень эффективная схема и стоимость её деталей при покупке для самостоятельной сборки довольно низкая.
В схеме используется Таймер 7555 для создания переменной ширины импульсов около 200 Гц. Он управляет транзистором Q3 (через транзисторы Q1 – Q2), который контролирует скорость электро двигателя или ламп освещения.
Есть много применений для этой схемы, которые будут питаться от 12 В: электродвигатели, вентиляторы или лампы. Использовать её можно в автомобилях, лодках и электротранспортных средствах, в моделях железных дорог и так далее.
Светодиодные лампы на 12 В, например LED ленты, тоже можно смело сюда подключать. Все знают, что светодиодные лампы гораздо более эффективны, чем галогенные или накаливания, они прослужит намного дольше. А если надо – питайте ШИМ-контроллер от 24 и более вольт, так как сама микросхема с буферным каскадом имеют стабилизатор питания.
Для регулировки частоты вращения маломощных электродвигателей коллекторного типа обычно применяют резистор, который включают последовательно с двигателем. Но такой способ включения обеспечивает очень низкий КПД, а самое главное не позволяет осуществлять плавную регулировку оборотов (найти переменный резистор достаточной мощности на несколько десятков Ом совсем не просто). А самый главный недостаток такого способа, это то, что иногда происходит остановка ротора при снижении напряжения питания.
ШИМ-регуляторы , речь о которых пойдет в этой статье, позволяют осуществлять плавную регулировку оборотов без перечисленных выше недостатков. Помимо этого ШИМ-регуляторы так же можно применять и для регулировки яркости ламп накаливания.
На рис.1 приведена схема одного из таких ШИМ-регуляторов . Полевой транзистор VT1 является генератором пилообразного напряжения (с частотой повторения 150 Гц), а операционный усилитель на микросхеме DA1 работает как компаратор, формирующий ШИМ-сигнал на базе транзистора VT2. Частота вращения регулируется переменным резистором R5, изменяющим ширину импульсов. Благодаря тому, что их амплитуда равна напряжению питания, электродвигатель не будет «тормозить», а кроме этого можно добиться более медленного вращения, чем в обычном режиме.
Схема ШИМ регуляторов на рис.2 аналогична предыдущей, но задающий генератор здесь выполнен на операционном усилителе (ОУ) DA1. Этот ОУ функционирует в роли генератора импульсов напряжения треугольной формы с частотой повторения 500 Гц. Переменный резистор R7 позволяет осуществлять плавную регулировку вращения.
На рис.3. представлена весьма интересная схема регулятора. Этот ШИМ регулятор выполнен на интегральном таймере NE555 . Задающий генератор имеет частоту повторения 500 Гц. Длительность импульсов, а, следовательно, и частоту вращения ротора электродвигателя можно регулировать в диапазоне от 2 до 98 % периода повторения. Выход генератора ШИМ регулятора на таймере NE555 подключен к усилителю тока, выполненному на транзисторе VT1 и собственно управляет электродвигателем М1.
Главным недостатком схем рассмотренных выше является отсутствие элементов стабилизации частоты вращения вала при изменении нагрузки. А вот следующая схема, показанная на рис.4., поможет решить эту проблему.
Данный ШИМ регулятор как и большинство аналогичных устройств, имеет задающий генератор импульсов напряжения треугольной формы (частота повторения 2 кГц), выполненный на DA1.1.DA1.2, компаратор на DA1.3, электронный ключ на транзисторе VT1, а также регулятор скважности импульсов, а по сути частоты вращения электродвигателя – R6. Особенностью схемы является наличие положительной обратной связи посредством резисторов R12, R11, диода VD1,конденсатора C2, и DA1.4, которая обеспечивает постоянную частоты вращения вала электродвигателя при изменении нагрузки. При подключении ШИМ регулятора к конкретному электродвигателю при помощи резистора R12 производится регулировка глубины ПОС, при которой не возникает автоколебаний частоты вращения при увеличении или уменьшении нагрузки на вал двигателя.
Элементная база. В приведенных в статье схемах можно использовать следующие аналоги деталей: транзистор КТ117А можно заменить на КТ117Б-Г или как вариант на 2N2646; КТ817Б – КТ815, КТ805; микросхему К140УД7 на К140УД6, или КР544УД1, ТL071, TL081; таймер NE555 на С555, или КР1006ВИ1; микросхему TL074 на TL064, или TL084, LM324. Если необходимо подключить к ШИМ-регулятору более мощную нагрузку ключевой транзистор КТ817 необходимо заменить более мощным полевым транзистором, как вариант, IRF3905 или подобным. Указанный транзистор способен пропускать токи до 50А.
Схема регулятора оборотов двигателя постоянного тока работает на принципах широтно-импульсной модуляции и применяется для изменения оборотов двигателя постоянного тока на 12 вольт. Регулирование частоты вращения вала двигателя при помощи широтно-импульсной модуляции дает больший КПД, чем при применение простого изменения постоянного напряжения подаваемого на двигатель, хотя эти схемы мы тоже рассмотрим
Двигатель подключен в цепь к полевому транзистору который управляется широтно-импульсной модуляцией осуществляемой на микросхеме таймере NE555, поэтому и схема получилась такой простой.
ШИМ регулятор реализован с помощью обычного генератора импульсов на нестабильном мультивибраторе, генерирующий импульсы с частотой следования 50 Гц и построенного на популярном таймере NE555. Сигналы поступающие с мультивибратора создают поле смещения на затворе полевого транзистора. Длительность положительного импульса настраивается при помощи переменного сопротивления R2. Чем выше длительность положительного импульса поступающего на затвор полевого транзистора, тем большая мощность подается на электродвигатель постоянного тока. И на оборот чем меньше длительность импульса, тем слабее вращается электродвигатель. Эта схема прекрасно работает от аккумуляторной батареи на 12 вольт.
Скорость 6 вольтового моторчика можно регулируется в пределах 5-95%
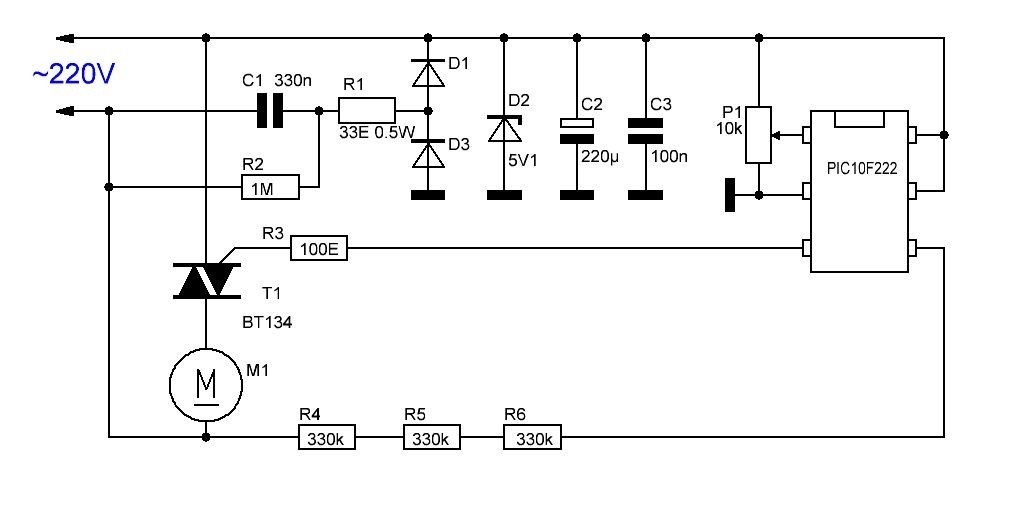
Регулировка оборотов в этой схеме достигается подачей на электромотор импульсов напряжения, различной длительности. Для этих целей используются ШИМ (широтно-импульсные модуляторы). В данном случае широтно-импульсное регулирование обеспечивается микроконтроллер PIC. Для управления скоростью вращения двигателя используются две кнопки SB1 и SB2, «Больше» и «Меньше». Изменять скорость вращенияможно только при нажатом тумблере «Пуск». Длительность импульса при этом изменяется, в процентном отношении к периоду, от 30 – 100%.
В качестве стабилизатора напряжения микроконтроллера PIC16F628A, используется трехвыводной стабилизатор КР1158ЕН5В, имеющий низкое падение напряжение «вход-выход», всего около 0,6В. Максимальное входное напряжение – 30В. Все это позволяет применять двигатели с напряжением от 6В до 27В. В роли силового ключа используется составной транзистор КТ829А который желательно установить на радиатор.
Устройство собрано на печатной плате размерами 61 х 52мм. Скачать рисунок печатной платы и файл прошивки можно по ссылке выше. (Смотри в архиве папку 027-el )
Цифровой ШИМ регулятор оборотов коллекторного двигателя.
Еще один обзор на тему всяких вещей для самоделок. На этот раз я расскажу о цифровом регуляторе оборотов. Вещица по своему интересная, но хотелось большего.Кому интересно, читайте дальше 🙂
Имея в хозяйстве некоторые низковольтные устройства типа небольшой шлифовальной машинки и т.п. я захотел немного увеличить их функциональный и эстетический вид. Правда это не получилось, хотя я надеюсь все таки добиться своего, возможно в другой раз, на за саму вещицу расскажу сегодня.
Производитель данного регулятора фирма Maitech, вернее именно это название часто встречается на всяких платках и блочках для самоделок, хотя сайт этой фирмы почему то мне не попался.
Из-за того, что я не сделал в итоге то, что хотел, обзор будет короче обычного, но начну как всегда с того, как это продается и присылается.
В конверте лежал обычный пакетик с защелкой.
В комплекте только регулятор с переменным резистором и кнопкой, жесткой упаковки и инструкции нет, но доехало все целым и без повреждений.Цифровой ШИМ регулятор оборотов коллекторного двигателя.
Сзади присутствует наклейка, заменяющая инструкцию. В принципе большего для такого устройства и не требуется.
Указан рабочий диапазон напряжения 6-30 Вольт и максимальный ток в 8 Ампер.Цифровой ШИМ регулятор оборотов коллекторного двигателя.
Внешний вид весьма неплох, темное «стекло», темно-серый пластик корпуса, в выключенном состоянии кажется вообще черным. По внешнему виду зачет, придраться не к чему. Спереди была приклеена транспортировочная пленка.
Установочные размеры устройства:
Длина 72мм ( минимальное отверстие в корпусе 75мм), ширина 40мм, глубина без учета передней панели 23мм (с передней панелью 24мм).
Размеры передней панели:
Длина 42.5, мм ширина 80ммЦифровой ШИМ регулятор оборотов коллекторного двигателя.
Переменный резистор идет в комплекте с ручкой, ручка конечно грубовата, но для применения вполне сойдет.
Сопротивление резистора 100КОм, зависимость регулировки — линейная.
Как потом выяснилось, 100КОм сопротивление дает глюк. При питании от импульсного БП невозможно выставить стабильные показания, сказывается наводка на провода к переменному резистору, из-за чего показания скачут +- 2 знака, но ладно бы скакали, вместе с этим скачут обороты двигателя.
Сопротивление резистора высокое, ток маленький и провода собирают все помехи вокруг.
При питании от линейного БП такая проблема отсутствует полностью.
Длина проводов к резистору и кнопке около 180мм.Цифровой ШИМ регулятор оборотов коллекторного двигателя.
Кнопка, ну тут ничего особенного. Контакты нормально открытые, установочный диаметр 16мм, длина 24мм, подсветки нет.
Кнопка выключает двигатель.
Т.е. при подаче питания индикатор включается, двигатель запускается, нажатие на кнопку его выключает, второе нажатие включает опять.
Когда двигатель выключен то индикатор так же не светится.Цифровой ШИМ регулятор оборотов коллекторного двигателя.
Под крышкой находится плата устройства.
На клеммы выведены контакты питания и подключения двигателя.
Плюсовые контакты разъема соединены вместе, силовой ключ коммутирует минусовой провод двигателя.
Подключение переменного резистора и кнопки разъемное.
На вид все аккуратно. Выводы конденсатора немного кривоваты, но я думаю что это можно простить :)Цифровой ШИМ регулятор оборотов коллекторного двигателя.
Дальнейшую разборку я спрячу под спойлер.
Индикатор довольно большой, высота цифры 14мм.
Размеры платы 69х37мм.Цифровой ШИМ регулятор оборотов коллекторного двигателя.
Плата собрана аккуратно, около контактов индикатора присутствуют следы флюса, но в целом плата чистая.
На плате присутствуют: диод для защиты от переполюсовки, стабилизатор 5 Вольт, микроконтроллер, конденсатор 470мкФ 35 Вольт, силовые элементы под небольшим радиатором.
Так же видны места под установку дополнительных разъемов, назначение их непонятно.Цифровой ШИМ регулятор оборотов коллекторного двигателя.
Набросал небольшую блок-схему, просто для примерного понимания что и как коммутируется и как подключается. Переменный резистор так и включен одной ногой к 5 Вольт, второй на землю. потому его можно спокойно заменить на более низкий номинал. На схеме нет подключений к нераспаянному разъему.Цифровой ШИМ регулятор оборотов коллекторного двигателя.
В устройстве использован микроконтроллер 8s003f3p6 производства STMicroelectronics.
Насколько мне известно, этот микроконтроллер используется в довольно большом количестве разных устройств, например ампервольтметрах.Цифровой ШИМ регулятор оборотов коллекторного двигателя.
Стабилизатор питания 78M05, при работе на максимальном входном напряжении нагревается, но не очень сильно.Цифровой ШИМ регулятор оборотов коллекторного двигателя.
Часть тепла от силовых элементов отводится на медные полигоны платы, слева видно большое количество переходов с одной стороны платы на другую, что помогает отводить тепло.
Так же тепло отводится при помощи небольшого радиатора, который прижат к силовым элементам сверху. Такое размещение радиатора кажется мне несколько сомнительным, так как тепло отводится через пластмассу корпуса и такой радиатор помогает несильно.
Паста между силовыми элементами и радиатором отсутствует, рекомендую снять радиатор и промазать пастой, хоть немного но станет лучше.Цифровой ШИМ регулятор оборотов коллекторного двигателя.
В силовой части применен транзистор IRLR7843, сопротивление канала 3.3мОм, максимальный ток 161 Ампер, но максимальное напряжение всего 30 Вольт, потому я бы рекомендовал ограничивать входное на уровне 25-27 Вольт. При работе на околомаксимальных токах присутствует небольшой нагрев.
Так же рядом расположен диод, который гасит выбросы тока от самоиндукции двигателя.
Здесь применен STPS1045 10 Ампер, 45 Вольт. К диоду вопросов нет.Цифровой ШИМ регулятор оборотов коллекторного двигателя.
Первое включение. Так получилось, что испытания я проводил еще до снятия защитной пленки, потому на этих фото она еще есть.
Индикатор контрастный, в меру яркий, читается отлично.Цифровой ШИМ регулятор оборотов коллекторного двигателя.
Сначала я решил попробовать на мелких нагрузках и получил первое разочарование.
Нет, претензий к производителю и магазину у меня нет, просто я надеялся, что в таком относительно недешевом устройстве будет присутствовать стабилизация оборотов двигателя.
Увы, это просто регулируемый ШИМ, на индикаторе отображается % заполнения от 0 до 100%.
Мелкого двигателя регулятор даже не заметил, дня него это совсем смешной ток нагрузки :)Цифровой ШИМ регулятор оборотов коллекторного двигателя.
Внимательные читатели наверняка обратили внимание на сечение проводов, которыми я подключил питание к регулятору.
Да, дальше я решил подойти к вопросу более глобально и подключил более мощный двигатель.
Он конечно заметно мощнее регулятора, но на холостом ходу его ток около 5 Ампер, что позволило проверить регулятор на режимах более приближенных к максимальным.
Регулятор вел себя отлично, кстати я забыл указать что при включении регулятор плавно увеличивает заполнение ШИМ от нуля до установленного значения обеспечивая плавный разгон, на индикаторе при этом сразу показывается установленное значение, а не как на частотных приводах, где отображается реальное текущее.
Регулятор не вышел из строя, немного нагрелся, но не критично.Цифровой ШИМ регулятор оборотов коллекторного двигателя.
Так как регулятор импульсный, то я решил просто ради интереса потыкаться осциллографом и посмотреть что происходит на затворе силового транзистора в разных режимах.
Частота работы ШИМа около 15 КГц и не меняется в процессе работы. Двигатель заводится примерно при 10% заполнения.Цифровой ШИМ регулятор оборотов коллекторного двигателя.Цифровой ШИМ регулятор оборотов коллекторного двигателя.
Изначально я планировал поставить регулятор в свой старый (скорее уже древний) блок питания для мелкого электроинструмента (о нем как нибудь в другой раз). по идее он должен был стать вместо передней панели, а на задней должен был расположиться регулятор оборотов, кнопку ставить не планировал (благо при включении устройство сразу переходит в режим — включено).
Должно было получиться красиво и аккуратно.Цифровой ШИМ регулятор оборотов коллекторного двигателя.
Но дальше меня ждало некоторое разочарование.
1. Индикатор хоть и был немного меньше по габаритам чем вставка передней панели, но хуже было то, что он не влазил по глубине упираясь в стойки для соединения половинок корпуса.
и если пластмассу корпуса индикатора можно было срезать, то не стал бы все равно, так как дальше мешала плата регулятора.
2. Но даже если бы первый вопрос я бы решил, то была вторая проблема, я совсем забыл как у меня сделан блок питания. Дело в том, что регулятор рвет минус питания, а у меня дальше по схеме стоит реле реверса, включения и принудительной остановки двигателя, схема управления всем этим. И с их переделкой оказалось все куда сложнее 🙁
Если бы регулятор был со стабилизацией оборотов, то я бы все таки заморочился и переделал схему управления и реверса, либо переделал регулятор под коммутацию + питания. А так можно и переделаю, но уже без энтузиазма и теперь не знаю когда.
Может кому интересно, фото внутренностей моего БП, собирался он лет так около 13-15 назад, почти все время работал без проблем, один раз пришлось заменить реле.
Резюме.
Плюсы
Устройство полностью работоспособно.
Аккуратный внешний вид.
Качественная сборка
В комплект входит все необходимое.
Минусы.
Некорректная работа от импульсных блоков питания.
Силовой транзистор без запаса по напряжению
При таком скромном функционале завышена цена (но здесь все относительно).
Мое мнение. Если закрыть глаза на цену устройства, то само по себе оно вполне неплохое, и выглядит аккуратно и работает нормально. Да, присутствует проблема не очень хорошей помехозащищенности, думаю что решить ее несложно, но немного расстраивает. Кроме того рекомендую не превышать входное напряжение выше 25-27 Вольт.
Больше расстраивает то, что я довольно много смотрел варианты всяких готовых регуляторов, но нигде не предлагают решение со стабилизацией оборотов. Возможно кто то спросит, зачем мне это. Объясню, как то попала в руки шлифовальная машинка со стабилизацией, работать гораздо приятнее чем обычной.
На этом все, надеюсь что было интересно 🙂
Товар предоставлен для написания обзора магазином.
Управление скоростью двигателя постоянного тока на основе ШИМ с использованием микроконтроллера
В этом проекте я покажу вам, как сгенерировать сигнал ШИМ с помощью микроконтроллера 8051, а также управление скоростью двигателя постоянного тока на основе ШИМ с помощью микроконтроллера.
Введение
Очень важно контролировать скорость двигателя постоянного тока во многих приложениях, где важны точность и защита. Здесь мы будем использовать метод под названием PWM (широтно-импульсная модуляция) для управления скоростью двигателя постоянного тока.
Мы можем добиться управления скоростью двигателя постоянного тока с помощью механических или электрических методов, но для их реализации требуется оборудование большого размера, но система на основе микроконтроллера обеспечивает простой способ управления скоростью двигателя постоянного тока.
Ранее мы уже видели , как управлять скоростью двигателя постоянного тока с помощью ШИМ без микроконтроллера . Здесь мы проводим тот же эксперимент, используя микроконтроллер.
Для этой цели мы будем использовать контроллер 8051 для генерации волны ШИМ. Изменяя ширину этой волны ШИМ, мы можем контролировать скорость двигателя постоянного тока. В микроконтроллере 8051 таймеры используются для генерации волны ШИМ.
В этой статье мы увидим, как сгенерировать сигнал ШИМ с использованием таймеров в Mocrocontroller 8051, а также как управлять скоростью двигателя постоянного тока с помощью этого сигнала ШИМ.
Управление скоростью двигателя постоянного тока на основе ШИМ с использованием принципа схемы микроконтроллера
Сердцем этого проекта является микроконтроллер 8051. Если вы работали с любым вариантом микроконтроллера 8051, вы, возможно, помните, что 8051 не имеет специальной схемы ШИМ для включения режима ШИМ. Итак, чтобы сгенерировать сигнал ШИМ, мы использовали таймеры и включали и выключали контакты ввода / вывода с помощью таймеров.
В этом проекте я буду использовать Timer0 в микроконтроллере 8051 вместе с Timer Interrupt для создания сигнала PWM.
Также прочтите соответствующий пост – Как работает схема драйвера шагового двигателя с использованием микроконтроллера 8051?
Как сгенерировать ШИМ в микроконтроллере 8051?
Большинство современных микроконтроллеров, таких как AVR (например, Arduino), ARM, PIC и т. Д., Имеют специальное оборудование для ШИМ и контакты для мгновенной активации режима ШИМ. Однако микроконтроллеры 8051 не имеют этого положения. Итак, как сгенерировать ШИМ в микроконтроллере 8051?
Для этого мы должны использовать таймеры и прерывания в микроконтроллере 8051.Timer0 8051 настроен в Mode0. Тщательно регулируя уровни High и Low, мы можем поддерживать постоянный период сигнала.
Принципиальная схема управления скоростью двигателя постоянного тока на основе ШИМ с использованием микроконтроллераКомпоненты схемы
- 8051 Микроконтроллер
- 11,0592 МГц Кристалл
- Конденсаторы – 33 пФ x 2, 10 мкФ кОм
- Резисторы – 1 кОм x 4, 10 кОм 2
- Двигатель постоянного тока 12 В
- Драйвер двигателя L298N
- Кнопки x 5
- 1 кОм x 8 Пакет подтягивающих резисторов
- Последовательный кабель
- Аккумулятор 12 В или адаптер
- Соединительные провода
Управление скоростью двигателя постоянного тока на основе ШИМ с использованием схемы микроконтроллера.
Схема состоит из одного микроконтроллера 8051 (и его вспомогательной схемы, связанной с генератором и сбросом), модуля драйвера двигателя L298N, двигателя постоянного тока и нескольких кнопок.
Двигатель 12 В постоянного тока подключен к модулю драйвера двигателя L298N на его выводах OUT1 и OUT2. Контакты IN1 и IN2 драйвера двигателя подключены к + 5V (VCC) и GND. Вывод EN1 драйвера двигателя подключен к выводу P0.0 порта 0.
Четыре кнопки подключены к контактам P0.4, P0.5, P0.6 и P0.7 порта 0.
Обычно мы можем сопрягать переключатели с микроконтроллером в двух конфигурациях; одна конфигурация вытягивания вверх, а другая – конфигурация вытягивания вниз.
Конфигурация с подтягиванием: В конфигурации с подтягиванием вывод микроконтроллера подтянут В ВЫСОКОМ состоянии к LOGIC 1, а кнопка подключена к GND.Когда кнопка нажата, вывод микроконтроллера получает LOGIC 0
Выпадающая конфигурация: В вытягивающей конфигурации вывод микроконтроллера опускается до LOGIC 0, и кнопка подключается к VCC. Когда кнопка нажата, вывод микроконтроллера получает LOGIC 1.
В нашей схеме мы используем подтягивающую конфигурацию. Итак, нам нужно проверить логический 0, чтобы узнать, нажата кнопка или нет.
Код
Код проекта приведен ниже.
Как управлять цепью?
- Подключите аккумулятор 12 В или адаптер к макетной плате.
- Включить питание.
- Записать шестнадцатеричный файл на контроллер 8051 с помощью программатора.
- Выполните необходимые подключения согласно принципиальной схеме.
- Теперь включите питание и нажмите выключатель 1. Вы можете наблюдать, как начинается вращение, но только при 40% мощности.
- Если вы нажмете переключатель 2, двигатель будет работать со скоростью, немного превышающей половину скорости (рабочий цикл 60%).
- Нажатие переключателя 3 заставит двигатель вращаться на полной скорости (100% рабочий цикл).
- Чтобы остановить двигатель, нажмите переключатель 4.
Преимущества
- Используя этот метод ШИМ, мы можем сэкономить электроэнергию.
Приложения
- Используется в промышленности для управления скоростью двигателей.
- Используется в торговых центрах.
- Мы можем использовать эту концепцию для управления интенсивностью света.
Управление скоростью двигателя постоянного тока с использованием широтно-импульсной модуляции, 555
Введение
В этом проекте я покажу, как можно реализовать управление скоростью двигателя постоянного тока с использованием 555 и широтно-импульсной модуляции (ШИМ).
В повседневной жизни мы используем двигатели постоянного тока во многих системах. Например, вентиляторы центрального процессора, огнетушители, игрушечные машинки и т. Д. – все это двигатели постоянного тока, которые работают от источника постоянного тока. В большинстве случаев нам придется регулировать скорость двигателей в соответствии с нашими требованиями.
Вентилятор ЦП, например, должен работать на высокой скорости, когда ЦП выполняет тяжелые задачи, такие как игры или редактирование видео. Но для обычного использования, такого как редактирование документов, скорость вентилятора можно уменьшить.
Хотя некоторые системы имеют систему автоматической регулировки скорости вентилятора, не все системы обладают этой функцией.Таким образом, нам придется время от времени регулировать скорость двигателя постоянного тока.
Как реализовано управление скоростью двигателя постоянного тока?
Существует несколько способов регулировки скорости двигателя постоянного тока вручную. Самый простой способ добиться этого – использовать переменный резистор, то есть мы можем регулировать скорость двигателя постоянного тока, используя переменное сопротивление последовательно с двигателем.
Но этот метод обычно не готов по двум причинам. Первая причина – потери энергии i.е. резистор рассеивает избыточную энергию в виде тепла. Вторая причина заключается в том, что если мы хотим использовать какие-либо устройства, такие как микроконтроллеры или любое другое цифровое оборудование, для автоматизации управления скоростью двигателя постоянного тока, то этот метод использовать нельзя.
Более эффективный способ продолжить – использовать метод широтно-импульсной модуляции для управления скоростью нашего двигателя постоянного тока.
Также прочтите соответствующий пост – Контроллер шагового двигателя с использованием микроконтроллера AT89C51
Принципиальная схема управления скоростью двигателя постоянного тока на основе ШИМ
Требуемые компоненты
- 555 Таймер IC
- Двигатель постоянного тока 12 В
- 1N5819 x 2
- 1N4007
- 100 нФ
- 100 пФ
- Резистор 10 кОм
- Потенциометр 100 кОм
- IRF540 MOSFET
- Мини-макетная плата
- Источник питания 12 В
- Соединительные провода
Для объяснения конструкции схемы
Я не собираюсь штыря Схема 555 IC и предположим, что вы уже знакомы с ней.Продолжая разработку схемы, вывод 1 из 555 подключен к GND. Контакты 8 и 4 подключены к источнику питания +12 В.
Контакты 6 и 2 короткие, и между контактом 2 и GND подключен конденсатор емкостью 100 нФ. Контакт стеклоочистителя POT подключается к контакту 3 555. Два диода Шоттки (1N5819) подключены к двум другим контактам POT, как показано на принципиальной схеме.
Общая точка диодов подключена к выводу 2. Вывод 7 подтягивается к высокому уровню с помощью резистора 10 кОм. Вывод затвора полевого МОП-транзистора подключен к выводу 7 из 555.Двигатель подключен между источником питания +12 В и стоком полевого МОП-транзистора, а источник полевого МОП-транзистора подключен к заземлению.
Соединительный диод PN подключается к клеммам двигателя для предотвращения обратной ЭДС.
ПРИМЕЧАНИЕ. Я не использовал диоды Шоттки, а заменил их простыми диодами 1N4007, поскольку частота ШИМ меньше (около 220 Гц).
Как работает управление скоростью цепи двигателя постоянного тока?
В этой схеме двигатель постоянного тока управляется интегральной схемой 555.Микросхема IC 555 в этой схеме работает в нестабильном режиме, который производит непрерывные импульсы HIGH и LOW.
В этом режиме микросхему 555 можно использовать в качестве широтно-импульсного модулятора с небольшими изменениями схемы. Частота работы схемы обеспечивается пассивными параметрами подключенных к ней сопротивлений и конденсаторов.
Прочтите также следующий пост: Сигнализация уровня воды с использованием таймера 555
ПРИМЕЧАНИЕ:
- Одна из лучших вещей в этой схеме – то, что вы можете заставить ее работать как нестабильный мультивибратор с небольшими затратами. аппаратное обеспечение и небольшая стоимость, что может сэкономить как затраты на его изготовление, так и место на печатной плате (PCB).
- Если вам нужен сложный широтно-импульсный модулятор, который работает более точно и может иметь больше возможностей настройки, то лучше использовать широтно-импульсный модулятор на основе микроконтроллера, чем тот, который мы используем сейчас.
- Однако схема или приложение, для которого мы используем широтно-импульсный модулятор, не так чувствительны и, следовательно, не требуют такой высокой точности. В таком случае схема, которую мы используем с голой микросхемой IC 555, лучше, поскольку она экономит наши денежные, а также космические ресурсы при построении схемы.
- Рабочий цикл цепи можно изменить, изменив значение потенциометра. Если мы увеличиваем рабочий цикл, скорость двигателя увеличивается, а если мы уменьшаем рабочий цикл, скорость двигателя уменьшается.
Вы заинтересованы в реализации этого проекта с использованием микроконтроллера? Тогда переходите к сообщению – Как работает схема управления скоростью двигателя постоянного тока на основе ШИМ с использованием микроконтроллера ?
Управление скоростью двигателя постоянного тока с использованием Arduino и PWM с программой и схемой
Управление скоростью двигателя постоянного тока с использованием Arduino и PWM
Управление скоростью двигателя постоянного тока с помощью интерфейса ПК – это простой проект, сделанный своими руками.В этом проекте скорость двигателя постоянного тока контролируется путем отправки команды через ПК. Arduino напрямую подключается к ПК через USB-кабель, и команда подается на Arduino на последовательном мониторе Arduino IDE.
Двигатель подключен к транзистору, а база транзистора подключена к выводу PWM Arduino, и скорость двигателей изменяется в соответствии с сигналом PWM, поступающим от Arduino.
Управление двигателем постоянного тока Arduino – Работает
Arduino подключается к ПК через USB-кабель.Мы можем отправить команду на ПК на последовательном мониторе. Мы можем изменить скорость двигателя от 0 до 9. Когда 0 посылается через Serial Monitor, двигатель работает на минимальной скорости (то есть нулевой). Когда скорость изменяется от 1 до 9, скорость увеличивается, при этом значение 9 устанавливается как максимальная скорость двигателя.
ШИМ-контроллер двигателя постоянного тока используется для управления скоростью. В ШИМ Arduino посылает пульсирующую волну, которая похожа на нестабильный режим микросхемы таймера 555.
ШИМ-контроль скорости (широтно-импульсная модуляция)
Микроконтроллер и Arduino – цифровые устройства; они не могут дать аналоговый выход.Микроконтроллер выдает на выходе НУЛЬ и ЕДИНИЦУ, где НУЛЬ – логический НИЗКИЙ, а ЕДИНИЦА – логический ВЫСОКИЙ. В нашем случае мы используем 5-вольтовую версию Arduino. Таким образом, логический НУЛЬ – это нулевое напряжение, а логический ВЫСОКИЙ – 5 напряжений.
Цифровой выход хорош для цифровых устройств, но иногда нам нужен аналоговый выход. В таком случае очень полезен ШИМ. В ШИМ выходной сигнал переключается между нулем и единицей, на высокой и фиксированной частоте, как показано на рисунке ниже.
Выходной сигнал ШИМКак показано на рисунке выше, время включения – «Ton», а время выключения – «Toff».T – это сумма «Ton» и «Toff», которая называется периодом времени. В концепции ШИМ «T» не меняется, и «Ton» и «Toff» могут изменяться, таким образом, когда «Ton» увеличивается, «Toff» будет уменьшаться, а «Toff» увеличиваться, когда «Ton» уменьшается пропорционально.
Рабочий цикл – это часть одного периода времени. Рабочий цикл обычно выражается в процентах или соотношении. Период – это время, необходимое сигналу для завершения цикла включения и выключения. В качестве формулы рабочий цикл может быть выражен как:
РАБОЧИЙ ЦИКЛ = (Тонн ÷ Т) x100%
Теперь скорость двигателя меняется в зависимости от рабочего цикла.Предположим, что коэффициент заполнения равен нулю, двигатель не работает, а при коэффициенте заполнения 100% двигатель работает на максимальных оборотах. Но эта концепция не всегда верна, потому что двигатель запускается после подачи некоторого фиксированного напряжения, называемого пороговым напряжением.
Транзистор (2N2222)
Микроконтроллери Arduino могут обрабатывать сигналы и потреблять ток от 20 до 40 мА, но двигатели нуждаются в большом токе и напряжении, поэтому мы используем транзистор для управления двигателем. Транзистор соединен последовательно с двигателем, а база транзистора соединена с выводом PWM Arduino через сопротивление.Сигнал PWM поступает от Arduino, и транзистор работает как переключатель, и он закорачивает эмиттер (E) и коллектор (C), когда сигнал PWM находится в состоянии High, и обычно открывается, когда сигнал PWM находится в состоянии LOW. Этот процесс работает непрерывно, и двигатели работают с желаемой скоростью.
Компоненты
| Компоненты | Спецификация | Количество |
|---|---|---|
| Arduino | Nano | 1 |
| Двигатель постоянного тока | Низкое энергопотребление | 1 |
| Транзистор | 2N222 | 1 |
| Адаптер питания | 12 В | 1 |
| Сопротивление | 1K | 1 |
| Диод | 1N4004 | 1 |
| USB-кабель | для Arduino Nano | 1 |
Управление двигателем постоянного тока Arduino – Схема
Принципиальная схема показана на рисунке ниже.Если вы делаете эту схему на печатной плате общего назначения (ZERO PCB) или макетной плате, этот рисунок будет полезен.
Управление скоростью двигателя постоянного тока ArduinoБолее того, если вы хорошо разбираетесь в травлении печатных плат, используйте изображения, представленные ниже.
Управление двигателем постоянного тока Arduino-PWM – Дизайн печатной платы Контроль скорости двигателя постоянного токаВ схеме используется Arduino Nano , очень маленький по размеру и дружественный к макетной плате.
Вывод BASE транзистора (2n2222) подключен к выводу D9 Arduino через сопротивление 1 кОм, сопротивление используется для ограничения тока. Двигатель подключен между коллекторным выводом транзистора и Vcc. Диод (1n4004) подключен параллельно двигателю с обратным смещением; он используется для блокировки обратного тока. Эмиттерный вывод транзистора подключен к земле. Эта схема питается от адаптера на 12 В.
Управление двигателем Arduino PWM – Видео
Управление двигателем постоянного тока Arduino Управление двигателем Arduino PWM
Управление скоростью двигателя постоянного тока – Загрузить программу
Скачать программу / код
В начале кода объявлены два целых числа с именами «out1» и «val», где out1 равно 9, что показывает, что вывод D9 Arduino используется как вывод (или вывод ШИМ).Более того, данные, поступающие от последовательного монитора, сохраняются во втором целом числе «val».
В void setup () последовательная связь начинается с использования функции «Serial.begin (9600)», где 9600 – это скорость передачи последовательного монитора. После этого «out1» объявляется как выход, потому что двигатель является выходным устройством.
В цикле void «serial.available» используется внутри условия «если», оно становится истинным, когда какие-либо данные отправляются через монитор последовательного порта. Эти данные сохраняются в виде целого числа val с использованием Serial.читать ».
После этого используется много условий «если», в первом «условии если», когда через монитор последовательного порта отправляется «0», оно становится истинным. В скобках «analogWrite (out1, 0)» используется для запуска двигателя при нулевом значении ШИМ. В функции analogWrite (out1, 0) «out1» используется для обозначения вывода, который мы хотим использовать, а «0» – это значение ШИМ на этом выводе. После этого на последовательном мониторе отображается «Speed is = 0» с помощью функции «Serial.println». После этого целое число «val» обновляется до 10, где 10 – случайное значение, отличное от 0 до 9.
В следующей строке, если условие используется для «val == 1», в это время двигатель работает со значением PWM, равным 175. Те же условия используются до 9, в 9 двигателях используется значение 255 PWM, 255 – это максимальное значение PWM. значение.
Процесс
- Подключите Arduino через USB и загрузите код
- Откройте монитор последовательного порта и установите скорость передачи 9600
- Теперь введите любое число от 0 до 9.
После ввода любого значения от нуля до 9 скорость двигателя меняется, но мы не можем правильно увидеть изменение скорости на видео, но вы можете увидеть это вживую.
A Управление скоростью двигателя постоянного тока с ШИМ с использованием микроконтроллера в аппаратном контуре | Reeba Rex
[1] Сундаресваран K и Сридеви В.Т., «Дизайн контроллера повышающего преобразователя с использованием GA с поддержкой Queen-Bee», IEEE Trans. Ind. Electron. , Том 56, № 3, (2009), стр. 779–783.
[2] Коупленд Б.Р., «Проектирование ПИД-регуляторов с использованием настройки Циглера Николса», (2008).
[3] Таид Ф, Салам Зи и Айоб С.М., «Реализация контроллера с нечеткой логикой с одним входом для повышающего преобразователя постоянного тока в постоянный», Международная конференция IEEE по мощности и энергии (PECon2010), , (2010), стр.797-802.
[4] Tan SC, Lai YM & Tse CK, «Реализация контроллера скользящего режима на основе широтно-импульсной модуляции для повышающих преобразователей», IEEE Power Electronics Letters , Vol.3, No. 4, (2005), С. 130-135.
[5] Mohan N, Undeland TM & Robbins WP, Power Electronics , 2-е изд. Нью-Йорк: Wiley, (2003).
[6] Равирадж В.С. и Сен ПК, «Сравнительное исследование пропорционально-интегральных, скользящих режимов и контроллеров нечеткой логики для преобразователей мощности», IEEE Trans.Ind. Appl. , Том 33, № 2, (1997), стр. 518–524.
[7] Зайцу Р., «Анализ контура управления малым сигналом повышающего преобразователя в режиме напряжения с использованием TPS61030», Texas Instruments, Appl. Отчет SLVA274A , (2009).
[8] Тан К.Л. и Малхолланд Р.Дж., «Сравнение нечеткой логики с классическим дизайном контроллера», IEEE Transactions on Systems, Man and cybernetics , Vol.6, (1987), pp.1085-1087.
[9] Ворпериан, «Упрощенный анализ преобразователей ШИМ с использованием модели переключателя ШИМ, части I (CCM) и II (DCM)», IEEE Transactions on Aerospace and Electronic Systems , Vol.26, № 3, (1990).
[10] Риба Рекс С и Мэри Синтия Регис Праба DM «Современный дизайн контроллера на основе оптимизации для повышающего преобразователя с использованием методов мягких вычислений», Jour of Adv Research in Dynamics & Control Systems , Vol.10, No. 2, ( 2018).
[11] Искакова, Сарсембаев М., Какенова З. (2018). Может ли Центральная Азия быть интегрирована как море? Opción, Año 33. 152–169.
[12] G Сели Галиндо (2017) Del Prometeo griego al de la era-biós de la tecnociencia. Reflexiones bioéticas Opción, Año 33, No.82 (2017): 114-133
Как правильно интегрировать управление скоростью двигателя для щеток и двигателя постоянного тока с BLDC
В моей предыдущей статье я описал четыре наиболее распространенных метода управления двигателем и насосом: входное напряжение, широтно-импульсная модуляция входного напряжения (ШИМ), внешний ШИМ и аналоговый вход скорости 0–5 В постоянного тока. Хотя внешнее ШИМ-управление предпочтительнее, когда требуется регулирование скорости, производители оригинального оборудования должны выбрать лучший стиль управления для своего приложения.Следующие ниже подробные описания помогут правильно интегрировать управление скоростью двигателя с любым выбранным вариантом.
Входное напряжение ШИМ (щетка или BLDC)
Этот метод, часто называемый «2-проводным» ШИМ, является одним из простейших методов управления скоростью насоса в устройстве. Сигнал ШИМ часто генерируется микроконтроллером и силовым транзистором. Входное напряжение двигателя включается и выключается с высокой частотой, так что средняя мощность двигателя снижается.На следующем изображении показан пример драйвера ШИМ «низкой стороны», в котором земля на двигатель переключается «сборкой пользовательской печатной платы» для снижения скорости.
Для щеточных двигателей наиболее распространенным и очень эффективным методом управления является 2-проводная ШИМ. Он так же эффективен с бесщеточными двигателями постоянного тока (BLDC), но имеет некоторые ограничения. Многие двигатели BLDC имеют внутренний контроллер, который для правильной работы должен поддерживать минимальное напряжение.Применение цикла ШИМ к входному напряжению также снижает эффективное напряжение на электронике контроллера; это ограничивает доступный диапазон регулирования скорости. Использование внешнего ШИМ-регулятора может обеспечить больший диапазон в этой ситуации.
Внешний ШИМ (только BLDC)
Это рекомендуемый метод управления скоростью мембранного насоса BLDC. Этот метод обеспечивает наиболее динамичное управление насосом и в некоторых случаях может упростить электрическую схему инженера, поскольку для сигнала переключения требуется только слаботочный транзистор.
Для большинства мембранных насосов с внешним ШИМ требуется схема с «открытым стоком» или «открытым коллектором» на печатной плате устройства OEM-разработчика для обеспечения сигнала ШИМ. Двигатели BLDC имеют внутренний подтягивающий резистор, поэтому схемы с открытым стоком или открытым коллектором будут активно подводить это напряжение к земле для нижней части сигнала ШИМ. На следующих рисунках показаны примеры рекомендуемых схем.
Аналоговый вход скорости 0–5 В постоянного тока (только BLDC)
В некоторых приложениях сигнал ШИМ невозможен или не является предпочтительным для разработчика системы.Многие двигатели BLDC имеют вход для внешнего аналогового сигнала постоянного тока. В этом случае на двигатель подается постоянное напряжение для работы, но отдельный вход с низким током от 0 до 5 В постоянного тока (желтый провод) регулирует скорость насоса.
Фактический диапазон управляющего напряжения может варьироваться в зависимости от двигателя, но концепция та же: сигнал 0 В постоянного тока отключит двигатель, 5 В постоянного тока будет представлять полную скорость, а диапазон между 0 и 5 В постоянного тока будет регулировать скорость двигателя. насос.
Контроль скорости – тахометр
Многие двигатели BLDC также могут выдавать сигнал тахометра, чтобы устройство инженера могло контролировать фактическую скорость насоса.Сигнал представляет собой цифровой импульс, который можно использовать для определения скорости насоса. Это полезно в приложениях, где насос должен работать очень медленно; с помощью этой информации контроллер устройства может увеличить скорость, если насос начинает останавливаться (то есть скорость насоса приближается к нулю). Он также обеспечивает дополнительную обратную связь по безопасности и / или диагностике для подтверждения правильного функционирования системы.
Проблемы проектирования: управляющий ввод против.Скорость
Сигнал управления скоростью двигателя может уменьшать или увеличивать расход, но это не линейная зависимость. Например, при фиксированном 50% -ном ШИМ-сигнале скорость насоса будет снижена, но не ровно на 50%. Кроме того, при изменении нагрузки на насос скорость насоса также изменится, даже если сигнал ШИМ является фиксированным.
ПОДРОБНЕЕ ОБ УПРАВЛЕНИИ ДВИГАТЕЛЯМИ:Максимальная скорость двигателя может быть уменьшена конфигурацией насоса или давлением / вакуумной нагрузкой на насос в приложении.Крутящий момент и скорость имеют линейную зависимость; когда для вращения насоса требуется больший крутящий момент, двигатель замедляется.
Остановка двигателя
Двигатели насоса могут быть повреждены, если насос остановится. Когда ротор двигателя заблокирован в этом положении и питание подается на двигатель, нагрев будет увеличиваться и может повредить внутренний контроллер. При использовании управления скоростью для снижения скорости остановка двигателя более вероятна, и за ней следует внимательно следить.
Разработчикам системы рекомендуется установить предохранитель по току или предохранитель для питания насоса.Это может помочь предотвратить повреждение двигателя насоса и системы в случае остановки.
Перезапуск с пониженной скоростью
Использование любого метода управления скоростью снижает полезную мощность двигателя. Если во время перезапуска скорость снижается, пусковой крутящий момент будет уменьшен. Разработчики должны обеспечить возможность повторного запуска насоса при любых условиях (таких как нагрузка давлением и температура окружающей среды) при снижении скорости.
Рекомендуемая частота
При использовании метода управления скоростью ШИМ рекомендуемая частота составляет 20 кГц.Частоты ниже 20 кГц могут создавать слышимый жужжащий звук, поскольку диапазон слышимых частот для людей составляет от 20 Гц до 20 кГц. Использование более высоких частот может ограничить диапазон регулирования из-за времени нарастания и спада транзистора; возможно переключение так быстро, что сигнал с низким или высоким коэффициентом заполнения будет отображаться как 0% или 100%, потому что транзистор не может переключаться достаточно быстро. Кроме того, в некоторых двигателях и схемах управления частота ШИМ выше 20 кГц может снизить эффективность.
Сводка
В эпоху, когда штат инженеров сокращается так же быстро, как и инструменты, которые они проектируют, это помогает работать с многогранными и опытными поставщиками компонентов.Например, Parker – поставщик насосов, который производит большинство своих собственных бесщеточных двигателей. Этот опыт в проектировании двигателей и насосов ускоряет настройку и производство прототипов, что может помочь сократить сроки и затраты на проектирование.
Джейми Кэмпбелл (Jamie Campbell) – инженер отдела приложений для региона EMEA в подразделении Precision Fluidics компании Parker Hannifin Co. Он проработал в Parker Hannifin пять лет. Он получил степень бакалавра компьютерной инженерии в Университете Северной Каролины в Шарлотте и степень магистра делового администрирования в Университете Восточной Каролины.
Использование ШИМ для управления двигателем постоянного тока – Блог Upverter
Начните работу с Altium Upverter, зарегистрируйтесь сейчас.Среднее значение постоянного тока для различного рабочего цикла
Двигателипостоянного тока преобразуют электрическую энергию в механическую, а скорость двигателя постоянного тока прямо пропорциональна величине входного напряжения постоянного тока. Направление вращения зависит от полярности входного напряжения.Во многих приложениях вы можете захотеть контролировать скорость или направление вращения, и вы можете использовать широтно-импульсную модуляцию (PWM) с H-мостом в качестве простого метода управления скоростью и направлением. В этой статье мы рассмотрим, что такое ШИМ и как использовать ШИМ для управления двигателем постоянного тока.
Что такое ШИМ?
Существует много типов схем модуляции, которые можно использовать для периодического изменения какого-либо аспекта цифрового или аналогового сигнала (частотная модуляция, амплитудная модуляция, фазовая модуляция и т. Д.). Как следует из названия, ШИМ – это тип модуляции, при которой ширина импульса изменяется без изменения частоты (то есть частоты повторения) сигнала. Время, в течение которого сигнал находится в ВЫСОКОМ состоянии, называется рабочим циклом. Как мы увидим, эта величина является фундаментальной при использовании ШИМ для управления двигателем постоянного тока.
Использование ШИМ вызывает изменение среднего значения постоянного тока сигнала при прохождении через фильтр нижних частот. Если такой сигнал подается на двигатель постоянного тока, мы можем изменить скорость двигателя, изменив рабочий цикл сигнала ШИМ.Изменение ширины импульса создается за счет увеличения времени включения (ВЫСОКОЕ значение) импульса при уменьшении времени выключения (НИЗКОЕ значение) на ту же величину, чтобы частота сигнала оставалась постоянной. Увеличение времени включения увеличивает среднее значение постоянного напряжения сигнала, и наоборот. На следующем рисунке показано изменение среднего значения постоянного тока в зависимости от рабочего цикла.
Среднее значение постоянного тока сигнала ШИМ для различных значений рабочего цикла.
Простое соотношение для расчета среднего значения постоянного тока:
, где В (REF) – значение высокого логического уровня.Это позволяет осуществлять аналоговое управление двигателем постоянного тока с помощью цифрового сигнала, что позволяет использовать микроконтроллеры для управления двигателями постоянного тока. Микроконтроллер может динамически изменять ширину импульса, обеспечивая мгновенное или постоянное изменение соответствующей скорости двигателя постоянного тока. Мы можем видеть, как выходное напряжение динамически изменяется в зависимости от рабочего цикла:
Зависимость скорости двигателя постоянного тока от рабочего цикла
Усиление выхода ШИМ
К сожалению, невозможно использовать выход микроконтроллера для непосредственного управления двигателем постоянного тока, поскольку ток обычно слишком мал для привода двигателя.Кроме того, все двигатели постоянного тока имеют пусковое напряжение, которое гарантирует, что двигатель начнет движение в любом направлении. Во многих случаях выходной сигнал микроконтроллера может быть недостаточно сильным для запуска двигателя.
Обычно сигнал ШИМ используется для управления переключателем BJT или FET, который подключает двигатель постоянного тока к высокому напряжению питания. Напряжение питания двигателя постоянного тока в этом случае становится равным
.Схема соединения между выходом ШИМ и двигателем постоянного тока показана ниже:
Схема драйвера MOSFET для двигателя постоянного тока. Источник изображения .
Использование H-образного моста для управления направлением
Если нам нужно управлять направлением двигателя, нам нужно реверсировать ток через него, и наиболее распространенный способ сделать это – использовать H-мост. H-мост содержит четыре переключателя в мостовой конфигурации с двигателем в центре.
H-образный мост для управления двигателем
Выборочно включив разные переключатели, мы можем изменить направление тока и, следовательно, направление вращения двигателя.Это также можно использовать для резкого торможения двигателя или для того, чтобы двигатель мог свободно работать до полной остановки из-за трения. Замыкающие переключатели S1 и S4 будут вращать двигатель в одном направлении, и наоборот, когда S2 и S3 замкнуты. Двигатель сломается, когда вы замкните переключатели S2 и S4 при разомкнутых других переключателях или когда вы замкните S1 и S3.
Если хотите, вы можете управлять направлением двигателя в цифровом виде, поместив транзисторы в вышеупомянутую Н-мостовую схему вместо механических переключателей.Например, когда транзисторы на S1 и S4 выводят ВЫСОКИЙ уровень, двигатель будет работать так же, как если бы механические переключатели были замкнуты. То же самое можно сказать и об остальных конфигурациях коммутатора.
Использование ШИМ для управления двигателем постоянного тока в вашем следующем проекте
Теперь, когда у вас есть довольно хорошее представление о том, как использовать ШИМ для управления двигателем постоянного тока и построить H-мост для дополнительной степени свободы, вы можете легко построить цифровую схему для управления направлением и усиления входного напряжения для запуска. мотор.Для этого требуется источник ШИМ и 5 дискретных транзисторов. Вы также можете использовать микроконтроллер (например, встроенный в Arduino) для генерации сигнала ШИМ и числового управления рабочим циклом. Если вы не хотите создавать схему управления направлением самостоятельно, вы можете использовать драйвер двигателя постоянного тока с двойным H-мостом 298N. Пример этого проекта можно найти здесь.
Вы можете зарегистрироваться бесплатно и получить доступ к лучшему редактору плат на базе браузера, редактору схем и базе данных компонентов. Посетите Upverter сегодня, чтобы узнать больше.
Как это:
Нравится Загрузка …
IRJET-Запрошенная вами страница не найдена на нашем сайте
IRJET приглашает статьи из различных инженерных и технологических дисциплин для Тома 8, выпуск 4 (апрель-2021)
Отправить сейчас
IRJET Vol-8, выпуск 4, апрель 2021 г. Публикация продолжается …
Обзор статей
IRJET получил «Импакт-фактор научного журнала: 7,529» на 2020 год.
Проверить здесь
IRJET получил сертификат регистрации системы менеджмента качества ISO 9001: 2008.
IRJET приглашает специалистов по различным инженерным и технологическим дисциплинам, научным дисциплинам для Тома 8, выпуск 4 (апрель-2021 г.)
Отправить сейчас
IRJET Vol-8, выпуск 4, апрель 2021 г. Публикация в процессе …
Просмотр Документы
IRJET получил «Импакт-фактор научного журнала: 7,529» за 2020 год.
Проверить здесь
IRJET получил сертификат регистрации ISO 9001: 2008 для своей системы менеджмента качества.
IRJET приглашает специалистов по различным инженерным и технологическим дисциплинам, научным дисциплинам для Тома 8, выпуск 4 (апрель-2021 г.)
Отправить сейчас
IRJET Vol-8, выпуск 4, апрель 2021 г. Публикация в процессе …
Просмотр Документы
IRJET получил «Импакт-фактор научного журнала: 7,529» за 2020 год.
Проверить здесь
IRJET получил сертификат регистрации ISO 9001: 2008 для своей системы менеджмента качества.
IRJET приглашает специалистов по различным инженерным и технологическим дисциплинам, научным дисциплинам для Тома 8, выпуск 4 (апрель-2021 г.)
Отправить сейчас
IRJET Vol-8, выпуск 4, апрель 2021 г. Публикация в процессе …
Просмотр Документы
IRJET получил «Импакт-фактор научного журнала: 7,529» за 2020 год.
Проверить здесь
IRJET получил сертификат регистрации ISO 9001: 2008 для своей системы менеджмента качества.
IRJET приглашает специалистов по различным инженерным и технологическим дисциплинам, научным дисциплинам для Тома 8, выпуск 4 (апрель-2021 г.)
Отправить сейчас
IRJET Vol-8, выпуск 4, апрель 2021 г. Публикация в процессе …
Просмотр Документы
IRJET получил «Импакт-фактор научного журнала: 7,529» за 2020 год.
Проверить здесь
IRJET получил сертификат регистрации ISO 9001: 2008 для своей системы менеджмента качества.
IRJET приглашает специалистов по различным инженерным и технологическим дисциплинам, научным дисциплинам для Тома 8, выпуск 4 (апрель-2021 г.)
Отправить сейчас
IRJET Vol-8, выпуск 4, апрель 2021 г. Публикация в процессе …
Просмотр Документы
IRJET получил «Импакт-фактор научного журнала: 7,529» за 2020 год.
Проверить здесь
IRJET получил сертификат регистрации ISO 9001: 2008 для своей системы менеджмента качества.
IRJET приглашает специалистов по различным инженерным и технологическим дисциплинам, научным дисциплинам для Тома 8, выпуск 4 (апрель-2021 г.)
Отправить сейчас
IRJET Vol-8, выпуск 4, апрель 2021 г. Публикация в процессе …
Просмотр Документы
IRJET получил «Импакт-фактор научного журнала: 7,529» за 2020 год.
