
Регулятор оборотов минидрели / Хабр
Сверление печатных плат — настоящая головная боль для электронщика, но наше новое устройство поможет ее немного смягчить. Это простое и компактное дополнение к минидрели позволит продлить жизнь двигателю и сверлам. Схема, плата, инструкции по настройке, видео — все в статье!
Для чего нужен регулятор оборотов
Обычно минидрели строятся на базе обычных двигателей постоянного тока. А обороты таких двигателей зависят от нагрузки и приложенного напряжения. В результате на холостых оборотах двигатель раскручивается очень сильно, а в моменты сверления обороты двигателя плавают в большом диапазоне.
Если снижать напряжение на двигателе, когда не нем нет нагрузки, можно добиться увеличения ресурса как свёрл, так и самих двигателей. Кроме того, даже точность сверления повышается. Самый простой способ добиться этого — измерение тока, потребляемого двигателем.
В интернете много схем подобных регуляторов, но большинство из них используют линейные регуляторы напряжения. Они массивные и требуют охлаждения. В соавторстве с TinyElectronicFriends нам захотелось сделать компактную плату на базе импульсного стабилизатора, чтобы она могла быть просто «надета» на двигатель.
Схема
ШИМ-регулятор со встроенным ключом MC34063 регулирует напряжение на двигателе. Напряжение на шунте R7,R9,R11 усиливается операционным усилителем и через компаратор подается на вход обратной связи ШИМ-контроллера.
Если ток меньше определенного значения, то на двигатель подается напряжение, зависящее от настройки сопротивления RV1. То есть на холостых оборотах на двигатель будет подаваться только часть мощности, а подстроечный резистор RV1 позволит отрегулировать обороты при этом.
Если сигнал на выходе ОУ превысит напряжение на компараторе, то на двигатель будет подано полное напряжение питания. То есть при сверлении двигатель будет включаться на максимальную мощность.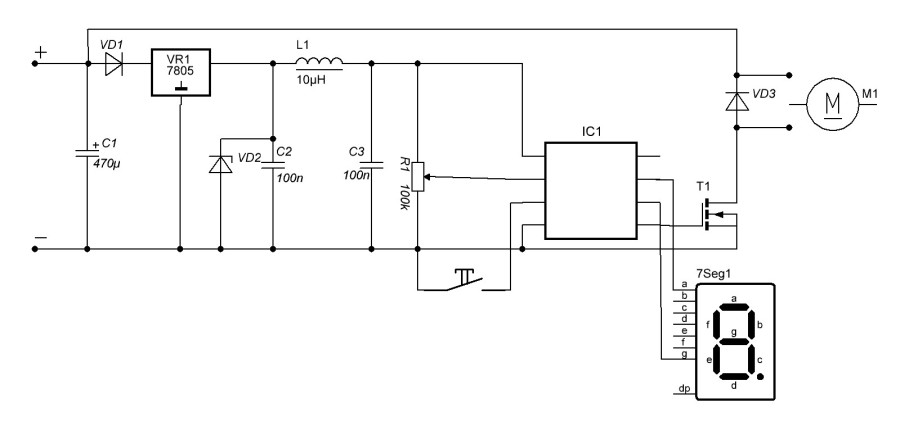 Порог включения задается резистором RV2.
Порог включения задается резистором RV2.
Для питания ОУ используется линейный стабилизатор.
Все компоненты схемы будут рассеивать очень мало тепла и можно собрать ее полностью на SMD-компонентах. Работать она может при большом диапазоне питающих напряжений (в зависимости от сопротивления R6), не требует контроллеров и датчиков оборотов.
Печатная плата
Вся схема умещается на двухсторонней печатной плате диаметром 30мм. На ней всего несколько штук переходных отверстий и ее легко можно изготовить «в домашних условиях». Ниже в статье будут файлы для скачивания файла печатной платы для SprintLaout.
Перечень компонентов
Вот полный список всего, что потребуется для сборки:
- Печатная плата (ссылка на файлы для изготовления в конце статьи)
- U1 — MC34063AD, импульсный стабилизатор, SOIC-8
- U2 — LM358, операционный усилитель, SOIC-8
- U3 — L78L09, стабилизатор, SOT-89
- D1,D3 — SS14, диод Шоттки, SMA — 2шт
- D2 — LL4148, диод выпрямительный, MiniMELF
- C1 — конденсатор, 10мкФ, 50В, 1210
 3нФ, 1206
3нФ, 1206- C3,C4 — конденсатор, 4.7мкФ, 1206 — 2шт
- C5 — конденсатор, 22мкФ, 1206
- R1-R3,R7,R9,R11 — резистор 1 Ом, 1206 — 6шт
- R4,R10 — резистор 22кОм, 1206 — 2шт
- R5 — резистор 1кОм, 1206
- R6 — резистор 10-27кОм, 1206. Сопротивление зависит от номинального напряжения используемого двигателя. 12В — 10кОм, 24В — 18кОм, 27В — 22кОм, 36В — 27кОм
- R8 — резистор 390 Ом, 1206
- RV1,RV2 — резистор подстрочный, 15кОм, типа 3224W-1-153 — 2шт
- XS1 — клемма, 2 конт, шаг 3,81мм
Также мы сделали на 3D-принтере кольцо-ограничитель, для удобной установки на двигатель. Ссылка для скачивания STL-файла для скачивания в конце статьи.
Сборка и настройка
Собирается все достаточно просто. Контактные площадки нарисованы под ручную пайку.
 Клемму проще устанавливать в последнюю очередь. Номинал R6 подбирается в соответствии с номинальным напряжением вашего двигателя. В этом устройстве важно контролировать положение ключа на микросхемах и полярность диодов. Все остальные компоненты не полярные.
Клемму проще устанавливать в последнюю очередь. Номинал R6 подбирается в соответствии с номинальным напряжением вашего двигателя. В этом устройстве важно контролировать положение ключа на микросхемах и полярность диодов. Все остальные компоненты не полярные.Между платой и двигателем над установить проставку, чтобы плата не касалась двигателя. Сама плата надевается прямо на ламели двигателя. Несколько раз проверьте полярность подключения двигателя, чтобы он крутился в правую сторону, а затем припаяйте контакты.
Контакты для подачи напряжения, на вход платы подписаны «GND» и “+36V”. Минус источника входного напряжения подключается к контакту «GND», а плюс к “+36V”. Напряжение источника питания должно совпадать с номинальным напряжением двигателя.
Настройка регулятора очень проста:
- Установить резистором RV2 порог срабатывания регулятора на максимум
- Установить резистором RV1 оптимальные обороты двигателя в режиме холостого хода
- Установить резистором RV2 такой порог срабатывания, чтобы при появлении малейшей нагрузки, увеличивалось напряжение на двигателе
Видео
Эффект от использования сложно оценить по видео, но мы теперь всегда сверлим только с регулятором! Требуется лишь немного привыкнуть и следить чтобы сверла были хорошо заточены.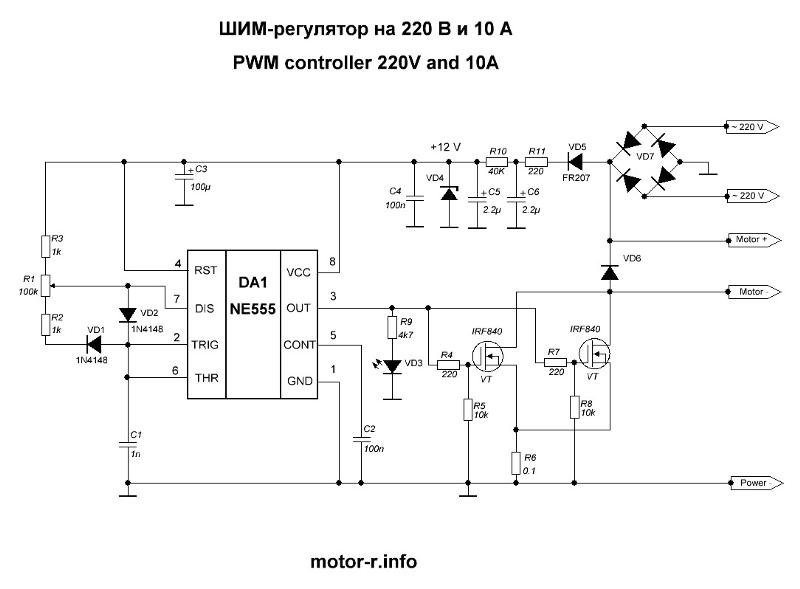 И, конечно, его можно в любой момент просто включить на максимум на всегда.
И, конечно, его можно в любой момент просто включить на максимум на всегда.
Ссылки
Ссылки для скачивания всех необходимых файлов вы можете найти на основной странице проекта.
Мощный шим регулятор для лабораторного блока питания
Схема регулятора оборотов двигателя постоянного тока работает на принципах широтно-импульсной модуляции и применяется для изменения оборотов двигателя постоянного тока на 12 вольт. Регулирование частоты вращения вала двигателя при помощи широтно-импульсной модуляции дает больший КПД, чем при применение простого изменения постоянного напряжения подаваемого на двигатель, хотя эти схемы мы тоже рассмотрим
Двигатель подключен в цепь к полевому транзистору который управляется широтно-импульсной модуляцией осуществляемой на микросхеме таймере NE555, поэтому и схема получилась такой простой.
ШИМ регулятор реализован с помощью обычного генератора импульсов на нестабильном мультивибраторе, генерирующий импульсы с частотой следования 50 Гц и построенного на популярном таймере NE555.
Скорость 6 вольтового моторчика можно регулируется в пределах 5-95%
Регулировка оборотов в этой схеме достигается подачей на электромотор импульсов напряжения, различной длительности. Для этих целей используются ШИМ (широтно-импульсные модуляторы). В данном случае широтно-импульсное регулирование обеспечивается микроконтроллер PIC. Для управления скоростью вращения двигателя используются две кнопки SB1 и SB2, «Больше» и «Меньше». Изменять скорость вращенияможно только при нажатом тумблере «Пуск».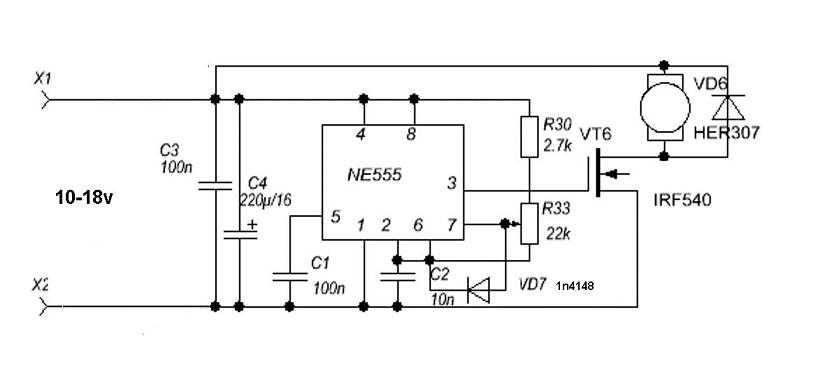
В качестве стабилизатора напряжения микроконтроллера PIC16F628A, используется трехвыводной стабилизатор КР1158ЕН5В, имеющий низкое падение напряжение «вход-выход», всего около 0,6В. Максимальное входное напряжение – 30В. Все это позволяет применять двигатели с напряжением от 6В до 27В. В роли силового ключа используется составной транзистор КТ829А который желательно установить на радиатор.
Устройство собрано на печатной плате размерами 61 х 52мм. Скачать рисунок печатной платы и файл прошивки можно по ссылке выше. (Смотри в архиве папку 027-el )
Для регулировки частоты вращения маломощных электродвигателей коллекторного типа обычно применяют резистор, который включают последовательно с двигателем. Но такой способ включения обеспечивает очень низкий КПД, а самое главное не позволяет осуществлять плавную регулировку оборотов (найти переменный резистор достаточной мощности на несколько десятков Ом совсем не просто).![]()
ШИМ-регуляторы , речь о которых пойдет в этой статье, позволяют осуществлять плавную регулировку оборотов без перечисленных выше недостатков. Помимо этого ШИМ-регуляторы так же можно применять и для регулировки яркости ламп накаливания.
На рис.1 приведена схема одного из таких ШИМ-регуляторов . Полевой транзистор VT1 является генератором пилообразного напряжения (с частотой повторения 150 Гц), а операционный усилитель на микросхеме DA1 работает как компаратор, формирующий ШИМ-сигнал на базе транзистора VT2. Частота вращения регулируется переменным резистором R5, изменяющим ширину импульсов. Благодаря тому, что их амплитуда равна напряжению питания, электродвигатель не будет «тормозить», а кроме этого можно добиться более медленного вращения, чем в обычном режиме.
Схема ШИМ регуляторов на рис.2 аналогична предыдущей, но задающий генератор здесь выполнен на операционном усилителе (ОУ) DA1. Этот ОУ функционирует в роли генератора импульсов напряжения треугольной формы с частотой повторения 500 Гц. Переменный резистор R7 позволяет осуществлять плавную регулировку вращения.
Этот ОУ функционирует в роли генератора импульсов напряжения треугольной формы с частотой повторения 500 Гц. Переменный резистор R7 позволяет осуществлять плавную регулировку вращения.
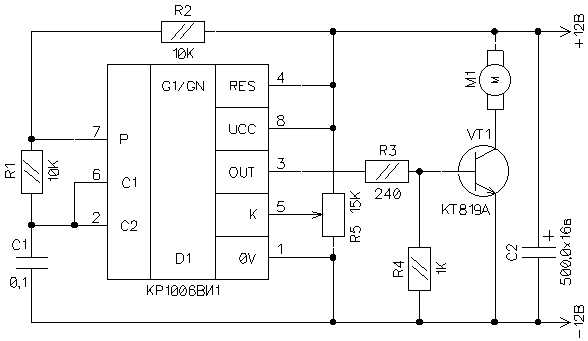
На рис.3. представлена весьма интересная схема регулятора. Этот ШИМ регулятор выполнен на интегральном таймере NE555 . Задающий генератор имеет частоту повторения 500 Гц. Длительность импульсов, а, следовательно, и частоту вращения ротора электродвигателя можно регулировать в диапазоне от 2 до 98 % периода повторения. Выход генератора
Главным недостатком схем рассмотренных выше является отсутствие элементов стабилизации частоты вращения вала при изменении нагрузки. А вот следующая схема, показанная на рис.4., поможет решить эту проблему.
Данный ШИМ регулятор как и большинство аналогичных устройств, имеет задающий генератор импульсов напряжения треугольной формы (частота повторения 2 кГц), выполненный на DA1. 1.DA1.2, компаратор на DA1.3, электронный ключ на транзисторе VT1, а также регулятор скважности импульсов, а по сути частоты вращения электродвигателя – R6. Особенностью схемы является наличие положительной обратной связи посредством резисторов R12, R11, диода VD1,конденсатора C2, и DA1.4, которая обеспечивает постоянную частоты вращения вала электродвигателя при изменении нагрузки. При подключении ШИМ регулятора к конкретному электродвигателю при помощи резистора R12 производится регулировка глубины ПОС, при которой не возникает автоколебаний частоты вращения при увеличении или уменьшении нагрузки на вал двигателя.
1.DA1.2, компаратор на DA1.3, электронный ключ на транзисторе VT1, а также регулятор скважности импульсов, а по сути частоты вращения электродвигателя – R6. Особенностью схемы является наличие положительной обратной связи посредством резисторов R12, R11, диода VD1,конденсатора C2, и DA1.4, которая обеспечивает постоянную частоты вращения вала электродвигателя при изменении нагрузки. При подключении ШИМ регулятора к конкретному электродвигателю при помощи резистора R12 производится регулировка глубины ПОС, при которой не возникает автоколебаний частоты вращения при увеличении или уменьшении нагрузки на вал двигателя.
Элементная база. В приведенных в статье схемах можно использовать следующие аналоги деталей: транзистор КТ117А можно заменить на КТ117Б-Г или как вариант на 2N2646; КТ817Б – КТ815, КТ805; микросхему К140УД7 на К140УД6, или КР544УД1, ТL071, TL081; таймер NE555 на С555, или КР1006ВИ1; микросхему TL074 на TL064, или TL084, LM324. Если необходимо подключить к ШИМ-регулятору более мощную нагрузку ключевой транзистор КТ817 необходимо заменить более мощным полевым транзистором, как вариант, IRF3905 или подобным. Указанный транзистор способен пропускать токи до 50А.
Указанный транзистор способен пропускать токи до 50А.
Эта самодельная схема может быть использована в качестве регулятора скорости для двигателя постоянного тока 12 В с номинальным током до 5 А или как диммер для 12 В галогенных и светодиодных ламп мощностью до 50 Вт. Управление идёт с помощью широтно-импульсной модуляции (ШИМ) при частоте следования импульсов около 200 Гц. Естественно частоту можно при необходимости изменить, подобрав по максимальной стабильности и КПД.
Большинство подобных конструкций собирается по гораздо . Здесь же представляем более усовершенствованный вариант, который использует таймер 7555, драйвер на биполярных транзисторах и мощный полевой MOSFET. Такая схематика обеспечивает улучшенное регулирование скорости и работает в широком диапазоне нагрузки. Это действительно очень эффективная схема и стоимость её деталей при покупке для самостоятельной сборки довольно низкая.
В схеме используется Таймер 7555 для создания переменной ширины импульсов около 200 Гц. Он управляет транзистором Q3 (через транзисторы Q1 – Q2), который контролирует скорость электро двигателя или ламп освещения.
Он управляет транзистором Q3 (через транзисторы Q1 – Q2), который контролирует скорость электро двигателя или ламп освещения.
Есть много применений для этой схемы, которые будут питаться от 12 В: электродвигатели, вентиляторы или лампы. Использовать её можно в автомобилях, лодках и электротранспортных средствах, в моделях железных дорог и так далее.
Светодиодные лампы на 12 В, например LED ленты, тоже можно смело сюда подключать. Все знают, что светодиодные лампы гораздо более эффективны, чем галогенные или накаливания, они прослужит намного дольше. А если надо – питайте ШИМ-контроллер от 24 и более вольт, так как сама микросхема с буферным каскадом имеют стабилизатор питания.
12–36 В, 60 А, ШИМ-регулятор скорости двигателя постоянного тока с использованием LM555 и печатной платы
| 14 |
Основная причина Для использования широтно-импульсной модуляции в управлении двигателем DC необходимо избежать чрезмерного рассеивания тепла, как в линейных схемах управления мощностью.
Так как в линейных схемах огромная проблема с отводом тепла. ШИМ 9Схемы управления 0018 значительно уменьшают эту проблему из-за их гораздо более высокой эффективности преобразования энергии.
Схема, которую мы собираемся построить, представляет собой простую схему, с принципом работы на ШИМ-управлении , на основе уже известного генератора LM555 и с супер доступной ценой на рынке.
Это регулятор широтной модуляции, которым можно управлять с помощью потенциометра, подстроечного потенциометра или даже с помощью постоянных резисторов, это зависит от вашего проекта.
Управление скоростью
Существует несколько методов, используемых для управления скоростью двигателя, из-за потребности тысяч приложений в промышленности возникла острая потребность в контроле этих скоростей.
Давным-давно, когда не существовало технологии электрического регулирования скорости, промышленное оборудование изменяло или регулировало скорость механически, с помощью шаговых шкивов, переключающих передач, механизма фрикционной муфты с регулируемой скоростью и других механических устройств.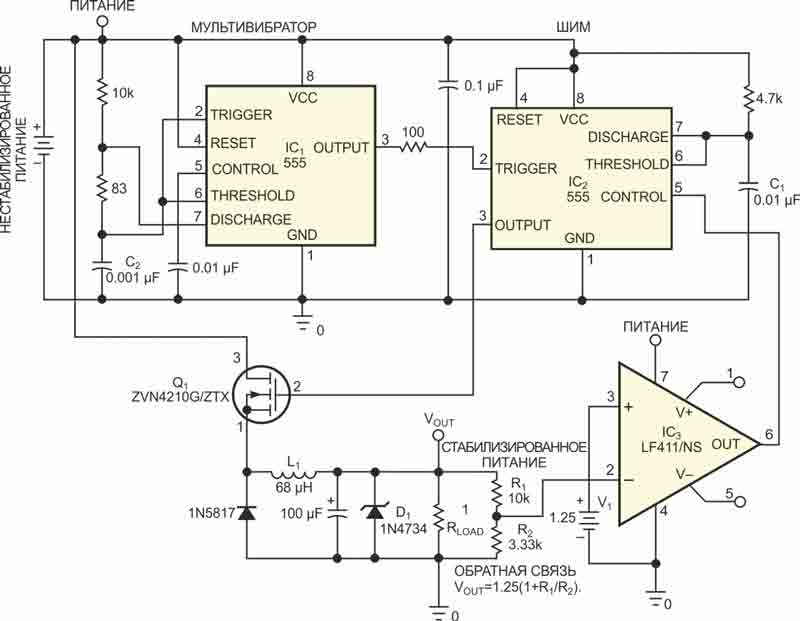
Электрическая регулировка скорости имеет много преимуществ как с экономической, так и с технической точки зрения по сравнению с механической регулировкой скорости.
Регулятор скорости моторных приводов в зависимости от их типа. Некоторым приводам требуется непрерывное изменение скорости во всем диапазоне от нуля до максимальной скорости, другим требуется часть этого диапазона, а третьим могут потребоваться две или более фиксированные скорости.
Как работает ШИМ
Широтно-импульсная модуляция Управление работает за счет очень быстрого включения и выключения питания, подаваемого на двигатель.
Напряжение постоянного тока преобразуется в сигнал прямоугольной формы, чередующийся между полным включением ( В постоянного тока макс. ) и нулем, что дает двигателю серию « толчков » мощности.
Широтно-импульсная модуляция (ШИМ ) — это метод управления скоростью, который может решить проблему плохого пуска двигателя.
ШИМ для управления скоростью двигателя работает почти так же. Вместо того, чтобы подавать на двигатель переменное напряжение, на него подается фиксированное значение напряжения ( Vdc Max ), что приводит к немедленному вращению.
Затем напряжение отключается, и двигатель «выбегает». Продолжая этот цикл включения/выключения напряжения с переменным рабочим циклом, можно контролировать скорость двигателя.
Как работает схема?
U1 подключен как низкочастотный автономный нестабильный мультивибратор с широтно-импульсной модуляцией ( ШИМ ). Компоненты R-C , такие как R1 , ВР1 и С1 определяют частоту колебаний.
Когда рычаг стеклоочистителя VR1 находится в верхнем положении, конденсатор C1 заряжается через R1 и D1/D2 и создает серию импульсов на IC с отрицательным и длинным выходом короткие положительные импульсы.
Поэтому скорость двигателя низкая. С другой стороны, когда рычаг стеклоочистителя VR1 находится в нижнем положении, C1 заряжается через R1 и разряжается через VR1 Результирующая последовательность импульсов имеет длинную положительную и короткую отрицательную ширину импульса.
С другой стороны, когда рычаг стеклоочистителя VR1 находится в нижнем положении, C1 заряжается через R1 и разряжается через VR1 Результирующая последовательность импульсов имеет длинную положительную и короткую отрицательную ширину импульса.
Теперь двигатель вращается с высокой скоростью. Выход IC на контакте 3 подается на пару транзисторов Q1 и Q2 , которые, в свою очередь, приводят в действие двигатель постоянного тока через высокомощные переключающие МОП-транзисторы Q3-Q6 при выбранной скорость. Резистор R4-R7 ограничивает ток базы силовых транзисторов.
Scheppach CSP50 с 2,45 л.с. и C…
Пожалуйста, включите JavaScript
Scheppach CSP50 с 2,45 л.с. и CSP5300 с 2,7 л.с. D4 – D7 – это диоды 15V , они служат для стабилизации напряжения базы транзисторов Mosfet, так как они очень чувствительны к напряжениям затвора.
Диод D8 , включенный встречно-параллельно с двигателем постоянного тока , ограничивает заднюю часть E.M.F . создается вращением двигателя.
Источник питания
Схема управления питается от источника питания, образованного микросхемой LM317HV , эта микросхема IC представляет собой стабилизатор высокого напряжения, который получает напряжение до 60В и настроен на стабилизированное выходное напряжение для питания схемы управления.
Это важно, так как LM555 IC поддерживает напряжение до 16 В , и наша схема работает с напряжениями в диапазоне от 12 В до 36 В .
Принципиальная схема
Принципиальная схема усилителя мощности показана на рис. 2 ниже. Он использует 8 выходных силовых транзисторов Mosfet, 4 транзистора для положительного цикла и 4 транзистора для отрицательного цикла.
Рис. 2. Принципиальная схема 12–36 В, 60 А ШИМ-контроллера скорости двигателя постоянного тока с использованием LM555 2. Принципиальная схема 12–36 В, 60 А ШИМ-контроллера скорости двигателя постоянного тока с использованием LM555 | 9. ……………………….. LM317HV Регулятор высокого напряжения
 …………….. 240 Ом ( красный, желтый, коричневый, золотой )
…………….. 240 Ом ( красный, желтый, коричневый, золотой ) 16 Нажмите на ссылку рядом: .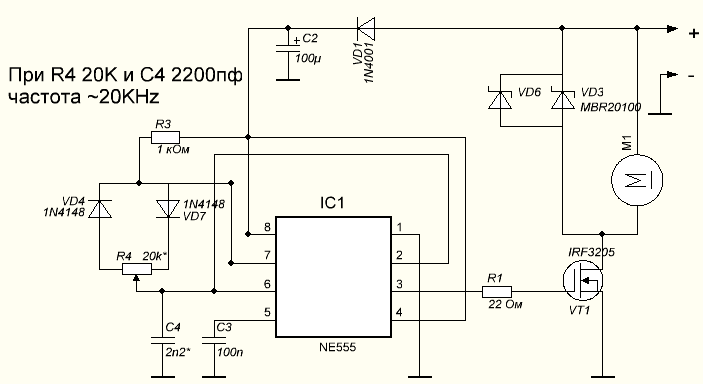 Файлы GERBER, PDF и PNG Файлы GERBER, PDF и PNG Если у вас есть какие-либо вопросы, предложения или исправления, оставьте их в комментариях, и мы ответим на них в ближайшее время. Подписывайтесь на наш блог!!! Нажмите здесь – elcircuits.com!!! С уважением!!! Простой контроллер двигателя постоянного тока с использованием микросхемы таймера 555
Контроллер фактически представляет собой комбинацию двух цепей двигатель должен работать. Так что на самом деле схема переключения — это основная цепь, которая управляет двигателем. Теперь есть два параметра двигателя постоянного тока, которыми можно управлять 1. Скорость 2. Направление Изменить направление вращения двигателя постоянного тока очень просто, просто измените направление питания, подаваемого на двигатель постоянного тока. Для изменения скорости двигателя постоянного тока необходимо изменить приложенное напряжение постоянного тока.
В этом проекте я использовал стандартную схему Н-моста в качестве драйвера двигателя постоянного тока и нестабильный мультивибратор (с использованием IC-555) в качестве генератора ШИМ. IC-555 генерирует ШИМ с базовой частотой 100 Гц. Этот PWM применяется к драйверу H-Bridge через переключатель DPDT, который определяет направление вращения по часовой стрелке или против часовой стрелки.
Приведенный здесь контроллер двигателя постоянного тока можно использовать для управления небольшими или средними двигателями постоянного тока бурильной машины, портативным вентилятором постоянного тока, небольшим водяным насосом и т. Рис. 1: Прототип контроллера скорости двигателя постоянного тока на базе микросхемы 555
Контроллер скорости двигателя постоянного тока на базе ИС Как мы уже говорили, в нашем проекте есть только два основных блока: один — ШИМ-генератор, а другой — драйвер двигателя постоянного тока H-Bridge. В качестве источника для всей цепи используется регулируемый источник питания 5 вольт. Генератор ШИМ генерирует ШИМ с базовой частотой 100 Гц. Он подается на драйвер Н-моста через коммутаторы. Один DPDT используется для выбора направления вращения по часовой стрелке или против часовой стрелки.
Описание схемы: Основными компонентами являются IC555, переключатель DPDT (двухполюсный с двойным проходом) и микросхема драйвера двигателя L293D. Сердцем схемы является IC-555. Соединения: – IC555 подключен в нестабильном режиме, и его частота определяется R1, потенциометром R2 и C1.
Операция:-
|
 Одним из хорошо известных методов, широко используемых в промышленности, является управление скоростью с широтно-импульсной модуляцией (ШИМ) двигателя постоянного тока , также известное как управление инвертором. В этом методе ШИМ применяется к двигателю постоянного тока, и по мере изменения ширины импульса среднее напряжение, подаваемое на двигатель, изменяется, и поэтому скорость двигателя также изменяется.
Одним из хорошо известных методов, широко используемых в промышленности, является управление скоростью с широтно-импульсной модуляцией (ШИМ) двигателя постоянного тока , также известное как управление инвертором. В этом методе ШИМ применяется к двигателю постоянного тока, и по мере изменения ширины импульса среднее напряжение, подаваемое на двигатель, изменяется, и поэтому скорость двигателя также изменяется. д.
д. Потенциометр R2 используется для изменения ширины импульса выходного сигнала. Выход IC-555 (контакт № 3) подключается к клеммам 1 и 4 переключателя DPDT, как показано на рисунке. Один светодиод также подключен к выходу IC555 через токоограничивающий резистор. Клеммы 2 и 3 переключателя DPDT соединены с землей. Клеммы 5 и 6 переключателя подключены к 2 входам L29.3D чип. Двигатель постоянного тока подключен к двум выходам L293D. Вся схема работает от одного источника питания 5 В.
Потенциометр R2 используется для изменения ширины импульса выходного сигнала. Выход IC-555 (контакт № 3) подключается к клеммам 1 и 4 переключателя DPDT, как показано на рисунке. Один светодиод также подключен к выходу IC555 через токоограничивающий резистор. Клеммы 2 и 3 переключателя DPDT соединены с землей. Клеммы 5 и 6 переключателя подключены к 2 входам L29.3D чип. Двигатель постоянного тока подключен к двум выходам L293D. Вся схема работает от одного источника питания 5 В.
