
Двигатель постоянного тока: схемы включения
Электродвигатели, работающие на постоянном токе, используются не так часто, как двигатели переменного тока. Ниже приведем их достоинства и недостатки.
| Достоинства | Недостатки |
| частота вращения легко регулируется | высокая стоимость |
| мягкий пуск и плавный разгон | сложность конструкции |
| получение частоты вращения выше 3000 об/мин | сложность в эксплуатации |
В быту двигатели постоянного тока нашли применение в детских игрушках, так как источниками для их питания служат батарейки. Используются они на транспорте: в метрополитене, трамваях и троллейбусах, автомобилях. На промышленных предприятиях электродвигатели постоянного тока применяются в приводах агрегатов, для бесперебойного электроснабжения которых используются аккумуляторные батареи.
Конструкция и обслуживание двигателя постоянного тока
Основной обмоткой двигателя постоянного тока является якорь, подключающийся к источнику питания через щеточный аппарат. Якорь вращается в магнитном поле, создаваемом полюсами статора (обмотками возбуждения). Торцевые части статора закрыты щитами с подшипниками, в которых вращается вал якоря двигателя. С одной стороны на этом же валу установлен вентилятор охлаждения, прогоняющий поток воздуха через внутренние полости двигателя при его работе.
Схема двигателя постоянного токаЩеточный аппарат – уязвимый элемент в конструкции двигателя. Щетки притираются к коллектору, чтобы как можно точнее повторять его форму, прижимаются к нему с постоянным усилием. В процессе работы щетки истираются, токопроводящая пыль от них оседает на неподвижных частях, ее периодически нужно удалять. Сами щетки нужно иногда перемещать в пазах, иначе они застревают в них под действием той же пыли и «зависают» над коллектором. Характеристики двигателя зависит еще и от положения щеток в пространстве в плоскости вращения якоря.
Характеристики двигателя зависит еще и от положения щеток в пространстве в плоскости вращения якоря.
Со временем щетки изнашиваются и заменяются. Коллектор в местах контакта со щетками тоже истирается. Периодически якорь демонтируют и протачивают коллектор на токарном станке. После протачивания изоляция между ламелями коллектора срезается на некоторую глубину, так как она прочнее материала коллектора и при дальнейшей выработке будет разрушать щетки.
Схемы включения двигателя постоянного тока
Наличие обмоток возбуждения – отличительная особенность машин постоянного тока. От способов их подключения к сети зависят электрические и механические свойства электродвигателя.
Независимое возбуждение
Обмотка возбуждения подключается к независимому источнику. Характеристики двигателя получаются такие же, как у двигателя с постоянными магнитами. Скорость вращения регулируется сопротивлением в цепи якоря. Регулируют ее и реостатом (регулировочным сопротивлением) в цепи обмотки возбуждения, но при чрезмерном уменьшении его величины или при обрыве ток якоря возрастает до опасных значений.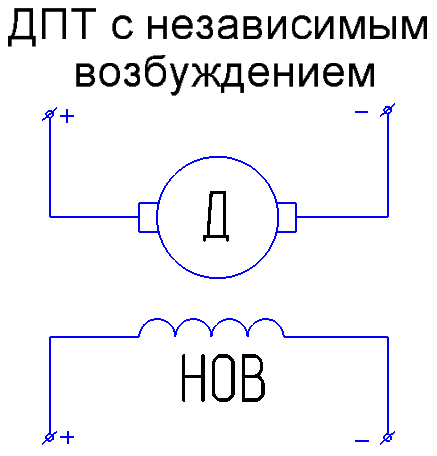 Двигатели с независимым возбуждением нельзя запускать на холостом ходу или с малой нагрузкой на валу. Скорость вращения резко увеличится, и двигатель будет поврежден.
Двигатели с независимым возбуждением нельзя запускать на холостом ходу или с малой нагрузкой на валу. Скорость вращения резко увеличится, и двигатель будет поврежден.
Остальные схемы называют схемами с самовозбуждением.
Параллельное возбуждение
Обмотки ротора и возбуждения подключаются параллельно к одному источнику питания. При таком включении ток через обмотку возбуждения в несколько раз меньше, чем через ротор. Характеристики электродвигателей получаются жесткими, позволяющие использовать их для привода станков, вентиляторов.
Регулировка скорости вращения обеспечивается включением реостатов в цепь ротора или последовательно с обмоткой возбуждения.
Схема параллельного возбужденияПоследовательное возбуждение
Обмотка возбуждения включается последовательно с якорной, по ним течет один и тот же ток. Скорость такого двигателя зависит от его нагрузки, его нельзя включать на холостом ходу. Но он обладает хорошими пусковыми характеристиками, поэтому схема с последовательным возбуждением применяется на электрифицированном транспорте.
Смешанное возбуждение
При этой схеме используются две обмотки возбуждения, расположенные попарно на каждом из полюсов электродвигателя. Их можно подключить так, чтобы потоки их либо складывались, либо вычитались. В результате двигатель может иметь характеристики как у схемы последовательного или параллельного возбуждения.
Схема смешанного возбужденияДля изменения направления вращения изменяют полярность одной из обмоток возбуждения. Для управления пуском электродвигателя и скоростью его вращения применяют ступенчатое переключение сопротивлений.
Оцените качество статьи:
Схема электродвигателя постоянного тока
Электродвигатель постоянного тока – проблема выбораЭлектродвигатель постоянного тока, как известно, работает на основе использования принципа магнитной индукции. При этом
основное и важнейшее преимущество электродвигателя постоянного тока заключается в возможности плавной регулировки в нем скорости вращения в различных диапазонах с высокой точностью.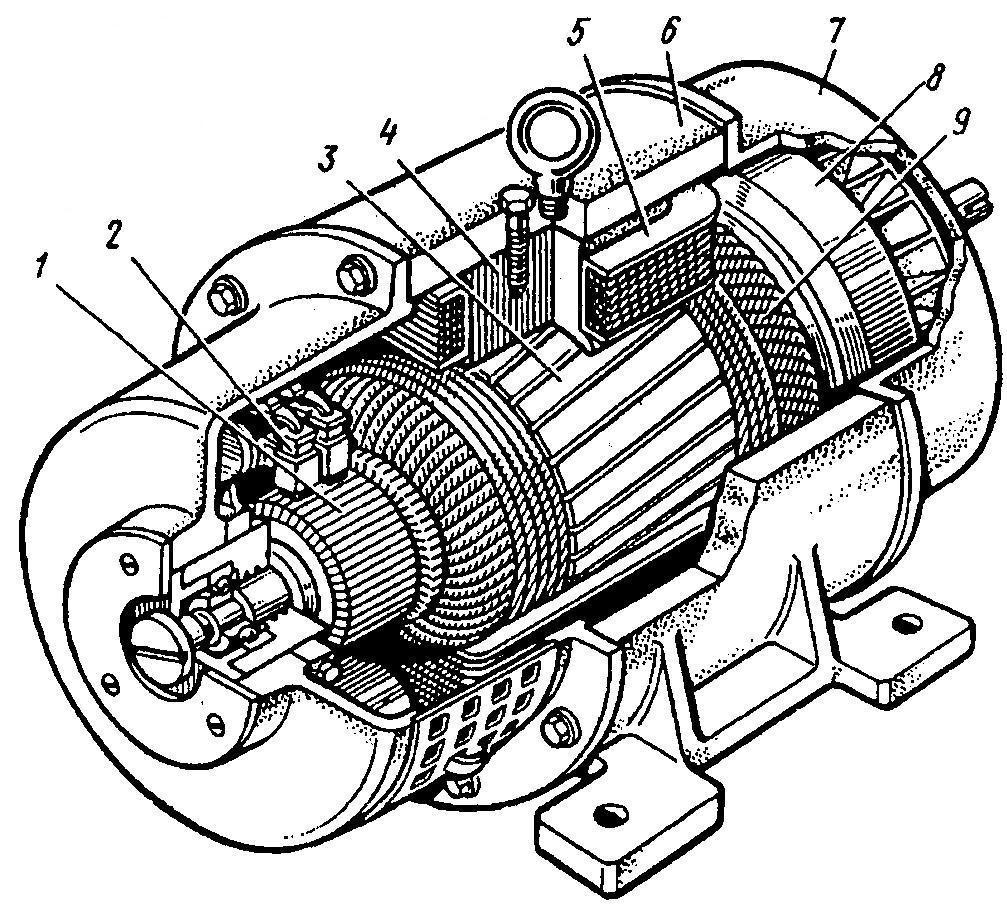
Вследствие этого данный тип электродвигателя приобрел широкое распространение на рельсовом и безрельсовом электрифицированном транспорте, в подъемных кранах, на прокатных станах, в устройствах автоматики и т. п. И, хотя сфера распространения электродвигателя постоянного ока выглядит достаточно внушительной, нельзя не заметить, что данный тип электродвигателя применяют только там, где применение другого типа двигателя – переменного тока невозможно или крайне нецелесообразно. Отсюда неудивительно, что в среднем, на каждые 70 двигателей переменного тока сегодня приходится всего лишь 1 электродвигатель постоянного тока.
Этот момент, кстати, так же резко снижает и выбор производителей данного типа электродвигателей на мировом рынке. Тем более, если мы говорим о качественном выборе. И здесь выбор электродвигателей постоянного тока от такого известного европейского производителя как T-T Electric может оказаться порой реально безальтернативным.
Разумеется, лишь в том случае, если Вам нужен именно электродвигатель постоянного тока.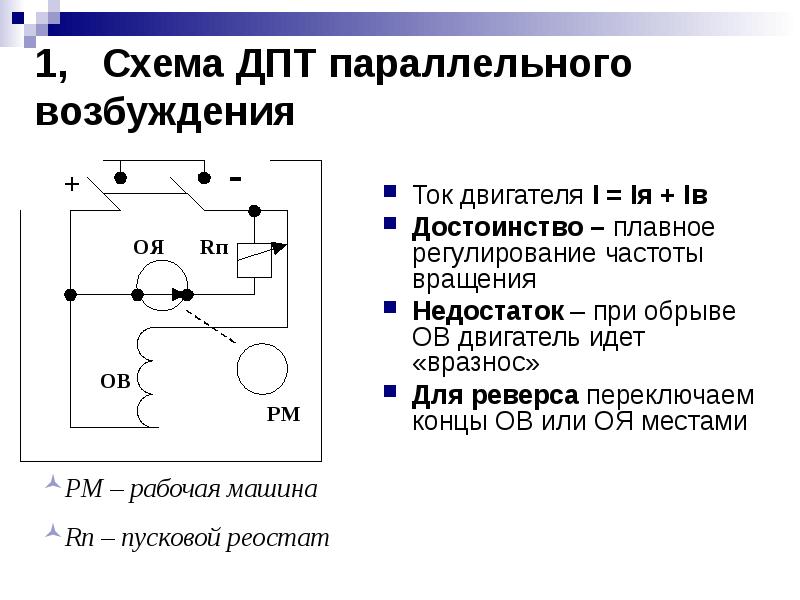 Но как понять, что этот именно тот выбор? Как же здесь не ошибиться?
Но как понять, что этот именно тот выбор? Как же здесь не ошибиться?
Для этого давайте рассмотрим устройство электродвигателя постоянного тока, проанализируем схему электродвигателя постоянного тока и принципы его работы.
Отличия электродвигателей постоянного и переменного токаНа сегодняшний день фактом является то, что довольно длительное противостояние двух видов тока, развернувшееся в мировой экономике и производстве в конце XIX – начале ХХ веков, привело к практически безоговорочной победе двигателя переменного тока и постепенной капитуляции электродвигателя постоянного тока.
Причины здесь многогранны и связаны как отчасти с относительной дороговизной электродвигателя постоянного тока, необходимостью его постоянного ремонта, так и с факторами прогресса самих “переменников” активно отвоевывающих все новые и новые ниши у электродвигателя постоянного тока. За электродвигатели переменного тока говорит простота их технологичной конструкции, высокие энергетическим показателям, надежность и стабильность работы.
Однако электродвигатели постоянного тока до сих пор также активно совершенствуются, здесь все также разрабатываются новые модели. И они все еще активно используются на производстве и в быту. Для того, чтобы понять, что это так достаточно просто пройтись по каталогу продукции T-T Electric, представленному на нашем сайте.
При этом основное технологическое отличие электродвигателя постоянного тока от двигателя переменного тока заключается наличие у первого коллектора – устройства переключающего обмотки во время вращения, и представляющего собой выведенные на изолированную часть вала начала и концы обмоток ротора двигателя. Тем самым устройство электродвигателя постоянного тока таково, что выводы якоря и выводы обмоток возбуждения здесь выводятся, как правило, на свои клеммы в клеммной коробке двигателя. На якорь поступает полное напряжение питания, в то время как на обмотку возбуждение регулируемый ток, например, от реостата, а в современных приводных системах, с платы обмотки возбуждения.
Правда стоит заметить, что у электродвигателей переменного тока также бывают выводы роторных обмоток, но в отличие от устройства электродвигателя постоянного тока, здесь они представляют из себя три сплошных кольца, на которые через коллекторный аппарат постоянно подаются фазовые напряжения.
Типы электродвигателя постоянного токаВ зависимости от подключения обмотки якоря и обмотки возбуждения двигатели постоянного тока делятся на электродвигатели с независимым возбуждением – обмотка возбуждения питается от своего источника, и с самовозбуждением – параллельное возбуждение, последовательное возбуждение и смешанное.В промышленности применяются двигатели с независимым возбуждением. В этих двигателях обмотка возбуждения питается от независимого источника напряжения.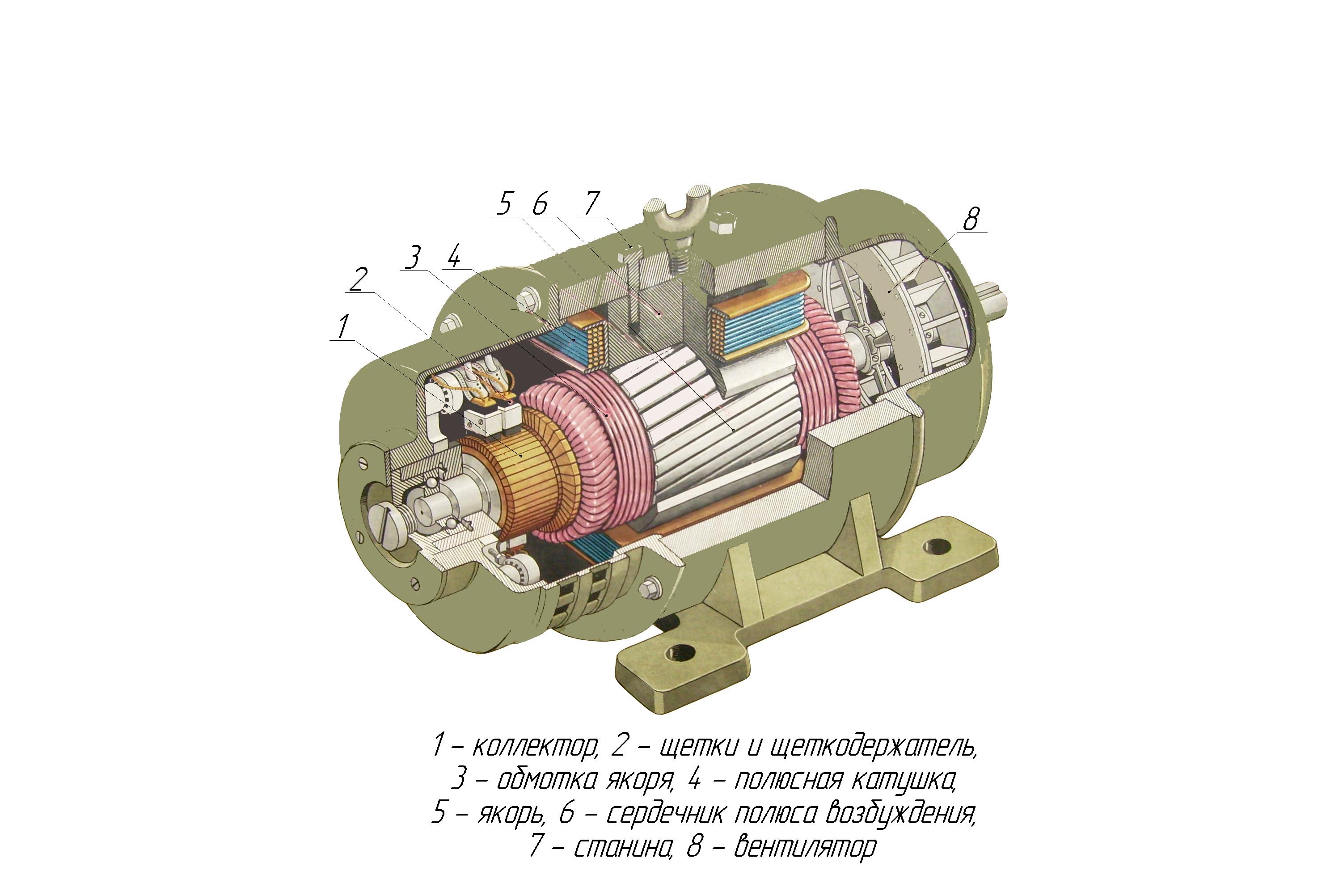
Схема подключения двигателя с последовательным возбуждением, по сути, является аналогом схемы с независимым возбуждением. Разница в том, что и якорь, и обмотка возбуждения (через сопротивление) подключены к одному источнику питания.
Двигатели с такой схемой подключения применяются в системах с четким механическими характеристиками, как-то: станки, вентиляторы и т.п.
Моторы постоянного тока с последовательным возбуждением применяется в тех случаях, когда необходим большой пусковой ток, а, следовательно, и момент, а также мягкая механическая характеристика.
Двигатели с таким способом подключения применяются на транспорте: электровозы, трамваи, троллейбусы. По этой схеме обмотка якоря и возбуждения подключены последовательно.
Если подать напряжение на двигатель, то токи в обмотках будут одинаковы. Основной недостаток этих двигателей заключается в том, что при уменьшении нагрузки на валу двигателя до 25% от номинального значения, происходит резкое увеличение оборотов двигателя, чреватое для двигателя постоянного тока. Поэтому для предотвращения этого недостатка двигатель все время приходится нагружать.
Поэтому для предотвращения этого недостатка двигатель все время приходится нагружать.
Очень редко применяется схема подключения двигателя со смешанным возбуждением. В этой схеме одна обмотка возбуждения включена последовательно, а другая параллельно якоря.
Таким образом на сегодняшний день существует множество вариантов исполнения электродвигателей постоянного тока, однако наиболее распространенным является двигатели с независимым возбуждением, подключаемые через особые приводы постоянного тока обеспечивающие не только рекуперацию энергии, но и точное поддержание скорости и стабильный момент на валу во всем диапазоне регулирования скорости
.Приводы такого типа широко представлены на данном сайте: это приводы постоянного тока серии DCS550 и приводы постоянного тока серии DCS800.
Двигатель постоянного тока с параллельным возбуждением (независимым): принцип работы
Содержание
- Характеристики двигателя постоянного тока с параллельным возбуждением
- Сферы применения двигателя
- Регулирование частоты вращения
- Двигатель с независимым возбуждением
Двигатель постоянного тока с параллельным возбуждением – это электродвигатель, у которого обмотки якоря и возбуждения подключаются друг к другу параллельно. Часто по своей функциональности он превосходит агрегаты смешанного и последовательного типов в случаях, если необходимо задать постоянную скорость работы.
Часто по своей функциональности он превосходит агрегаты смешанного и последовательного типов в случаях, если необходимо задать постоянную скорость работы.
Характеристики двигателя постоянного тока с параллельным возбуждением
Формула общего тока, идущего от источника, выводится согласно первому закону Кирхгофа и имеет вид: I = Iя + Iв, где Iя – ток якоря, Iв – ток возбуждения, а I – ток, который двигатель потребляет от сети. Следует отметить, что при этом Iв не зависит от Iя, т.е. ток возбуждения не зависит от нагрузки. Величина тока в обмотке возбуждения меньше тока якоря и составляет примерно 2-5% от сетевого тока.
В целом, данные электродвигатели отличаются следующими весьма полезными тяговыми параметрами:
- Высокая экономичность (поскольку ток якоря не проходит через обмотку возбуждения).
- Устойчивость и непрерывность рабочего цикла при колебаниях нагрузки в широких пределах (т.
 к. величина момента сохраняется даже в случае изменения числа оборотов вала).
к. величина момента сохраняется даже в случае изменения числа оборотов вала).
При недостаточном моменте пуск осуществляется посредством перехода на смешанный тип возбуждения.
Сферы применения двигателя
Поскольку частота вращения подобных двигателей остается почти постоянной даже при изменении нагрузки, а также может изменяться при помощи регулировочного реостата, они широко применяются в работе с:
- вентиляторами;
- насосами;
- шахтными подъемниками;
- подвесными электрическими дорогами;
- станками (токарными, металлорежущими, ткацкими, печатными, листоправильными и пр.).
Таким образом, этот вид двигателей в основном используется с механизмами, требующими постоянства скорости вращения или ее широкой регулировки.
Регулирование частоты вращения
Регулирование скорости – это целенаправленное изменение скорости электродвигателя в принудительном порядке при помощи специальных устройств или приспособлений. Оно позволяет обеспечить оптимальный режим работы механизма, его рациональное использование, а также уменьшить расход энергии.
Оно позволяет обеспечить оптимальный режим работы механизма, его рациональное использование, а также уменьшить расход энергии.
Существует три основных способа регулирования скорости двигателя:
- Изменение магнитного потока главных полюсов. Осуществляется при помощи регулировочного реостата: при увеличении его сопротивления магнитный поток главных полюсов и ток возбуждения Iв уменьшаются. При этом увеличивается число оборотов якоря на холостом ходу, а также угол наклона механической характеристики. Жесткость механических характеристик сохраняется. Однако увеличение скорости может привести к механическим повреждениям агрегата и к ухудшению коммутации, поэтому не рекомендуется увеличивать частоту вращения этим методом более чем в два раза.
- Изменение сопротивления цепи якоря. К якорю последовательно подключается регулировочный реостат. Скорость вращения якоря уменьшается при увеличении сопротивления реостата, а наклон механических характеристик увеличивается.
 Регулировка скорости вышеуказанным способом:
Регулировка скорости вышеуказанным способом:
- способствует уменьшению частоты вращения относительно естественной характеристики;
- связана с большой величиной потерь в регулировочном реостате, следовательно, неэкономична.
- Безреостатное изменение подаваемого на якорь напряжения. В этом случае необходимо наличие отдельного источника питания с регулируемым напряжением, например, генератора или управляемого вентиля.
Двигатель с независимым возбуждением
Двигатель постоянного тока независимого возбуждения как раз и реализует третий принцип регулирования скорости. Его отличие в том, что обмотка возбуждения и магнитное поле главных полюсов подключаются к разным источникам. Ток возбуждения является неизменной характеристикой, а магнитное поле меняется. При этом изменяется число оборотов вала на холостом ходу, жесткость характеристики остается прежней.
Таким образом, принцип работы дпт с независимым возбуждением является достаточно сложным вследствие независимой работы двух источников, тем не менее, его главное преимущество – большая экономичность.
Схемы включения двигателей постоянного тока
| Фиг. 1. Схема включения двигателя постоянного тока параллельного возбуждения. |
| Рис. 66. Схема включения двигателя постоянного тока с независимым возбуждением |
| Рис. 2.2.7. Схемы включения двигателей постоянного тока а — независимого возбуждения б — последовательного возбуждения в — смешанного возбуждения |
 6.18. Контроллер имеет дугогасящую катушку МЗ. При установке барабана контроллера в первое рабочее положение включается контактор и отключается после перевода барабана в нулевое положение. Контактор отключается также при размыкании одного из конечных выключателей Ql и Q2. Проследим цепь питания катушки контактора один конец ее включен в главную цепь (+Л1), а второй конец присоединен к пальцу 4 контроллера и через сегменты контроллера 3 или 4 (в зависимости от направления) и один из конечных выключателей соединен со вторым проводом главной цепи (—Л2).
[c.276]
6.18. Контроллер имеет дугогасящую катушку МЗ. При установке барабана контроллера в первое рабочее положение включается контактор и отключается после перевода барабана в нулевое положение. Контактор отключается также при размыкании одного из конечных выключателей Ql и Q2. Проследим цепь питания катушки контактора один конец ее включен в главную цепь (+Л1), а второй конец присоединен к пальцу 4 контроллера и через сегменты контроллера 3 или 4 (в зависимости от направления) и один из конечных выключателей соединен со вторым проводом главной цепи (—Л2).
[c.276]Одновременно с включением электродвигателя включается и параллельный тормозной электромагнит У В. Схема управления двигателями постоянного тока с электрическим торможением рассмотрена ниже. [c.277]
Измерительным прибором служит мост типа ЭТП-209 со сдвоенным реохордом для включения в систему слежения обратной связи. Реохорд задачи программы прибора РУ-5-01 и реохорд обратной связи измерительного прибора ЭТП-209 образуют мостовую схему.
 При наличии разбаланса в мостовой схеме сигнал поступает в усилительную аппаратуру и на исполнительные органы до устранения в системе разбаланса. Усилительной частью схемы служат ламповый и электромашинный усилитель типа ЭМУ-12А. Электромашин-ный усилитель работает в паре с двигателем постоянного тока серии П-12, нагружающим образец через соответствующую систему механического редуцирования.
[c.64]
При наличии разбаланса в мостовой схеме сигнал поступает в усилительную аппаратуру и на исполнительные органы до устранения в системе разбаланса. Усилительной частью схемы служат ламповый и электромашинный усилитель типа ЭМУ-12А. Электромашин-ный усилитель работает в паре с двигателем постоянного тока серии П-12, нагружающим образец через соответствующую систему механического редуцирования.
[c.64]С высоким пусковым моментом, большим числом включении в час и регулированием скорости Двигатели постоянного тока последовательного или смешанного возбуждения, иногда с искусственными схемами соединения обмоток Механизмы подъема и передвижения кранов большой производительности и точности, вспомогательные металлургические механизмы, электрическая тяга [c.239]
Двигатели постоянного тока параллельного возбуждения 501, 513 — Пусковая диаграмма 503 — Схема включения 501 — Торможение — Схема 502 —Характеристики 502, 503, 504, 505, 513
[c.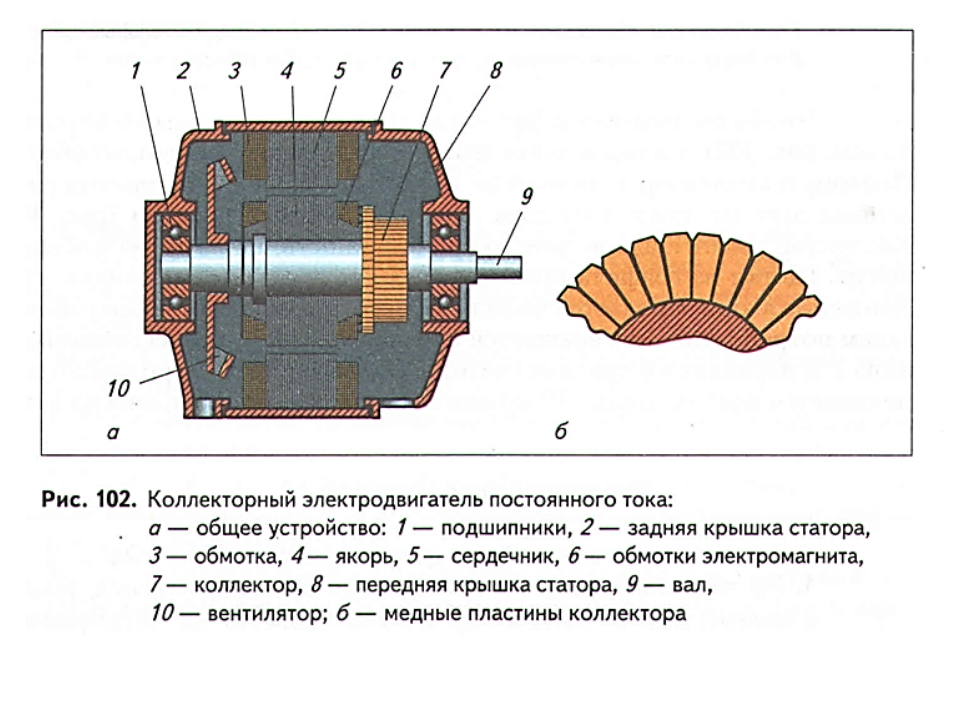 708]
708]
Схема электропривода напорного механизма. Этот механизм приводится в действие двигателем постоянного тока ДН, включенным последовательно в цепь якоря генератора напора ГН. Электриче- [c.272]
Схема электропривода поворотного механизма. Для приведения в действие механизма поворота на экскаваторе ЭКГ-4,6 применяются два двигателя постоянного тока 1ДВ и 2ДВ, которые получают питание от генератора поворота ГВ. Электрическая схема управления этим приводом также не отличается от рассмотренной выше схемы привода подъема, за исключением того, что здесь отсутствует узел ослабления поля двигателя. Кроме того, в рассматриваемой схеме предусматривается реле контроля напряжения РП, включенное на падение напряжения в главной цепи (точки 210—240). Это реле включает узел гашения ноля генератора (н. о. контакты 252). [c.273]
Схема электропривода механизма подъема ковша. Подъемная лебедка приводится в действие двигателем постоянного тока ДП (см.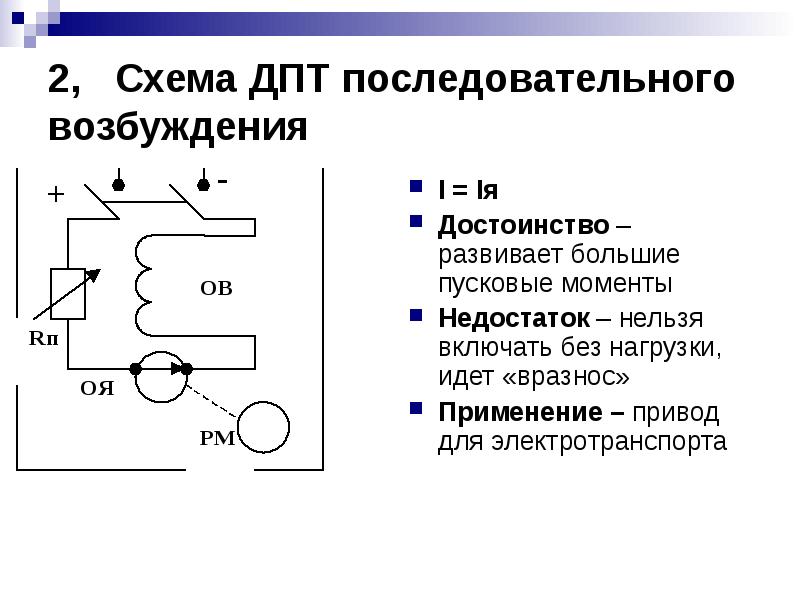 рис. 177), включенным последовательно в цепь трехобмоточного генератора подъема ГП.
[c.279]
рис. 177), включенным последовательно в цепь трехобмоточного генератора подъема ГП.
[c.279]
В электроприводе лифтов наиболее часто используют схему включения двигателя с независимым возбуждением (рис. 66). Напряжение и с от источника постоянного тока подводится к зажимам якорной обмотки и Я2, а напряжение и в — к шунтовой обмотке возбуждения двигателя ОВд на зажимы Ш1 и Ш2. [c.106]
В электрических приводах для бесступенчатого изменения скорости вращения шпинделя используется свойство двигателей постоянного тока плавно изменять число оборотов ротора при определенной схеме включения. Однако отсутствие в цехе источников постоянного тока весьма затрудняет использование этого метода на практике. Такая схема регулирования не получила заметного применения и встречается лишь в нескольких моделях токарных автоматов и редко в других моделях станков. [c.24]
Основными обмотками статора двигателя постоянного тока являются шунтовая и сериесная обмотки возбуждения, использующиеся для создания различных схем включения двигателей. [c.125]
Математические модели генераторов и двигателей постоянного тока общеизвестны. Наличие нелинейной характеристики намагничивания и обмотки самовозбуждения генератора усложняет обычную структуру модели генератора. Математическая модель рассматриваемого генератора получается на основе электромагнитных контуров схемы включения. [c.412]
Общий метод расчета механической характеристики двигателей постоянного тока в рассматриваемой схеме (рис. 7-1) включения заключается в нахождении за-, висимостей / =/ (/,1.) и /ц, =/(/я ) и последующем переходе к зависимости n, = f(M,). [c.137]
Тяговые двигатели электровозов переменного тока, которые часто называют двигателями пульсирующего тока, по своей конструкции и схеме включения несколько отличны от обычных двигателей постоянного тока. Для снижения пульсационных потерь в магнитной системе машины обмотки возбуждения постоянно шунтированы активным сопротивлением как показано на рис. 39 и 41. [c.48]
Для управления двигателями постоянного тока, так же как и переменного, можно применять магнитные контроллеры. Схема управления с магнитным контроллером типа П, изображенная на рис. 6.23, предназначена для механизмов передвижения. Этот контроллер имеет симметричную схему включения, в которой предусмотрены торможение противовключением и регулирование частоты вращения пусковыми резисторами. [c.280]
В приведенной на рис. 103, б схеме регулятора органом сравнения служит механический дифференциал Д. Сравнение выходного сигнала с МЭП и заданного осуществляется следующим образом. Угловая частота выходного вала 1 дифференциала Др, вращательное движение которого преобразуется винтовой парой 2 в поступательное перемещение ЭИ, зависит от разности угловых частот вращения входных валов дифференциала. Один из этих валов вращается асинхронным двигателем Д с неизменной угловой частотой Шз, а другой (4) — с частотой С04 двигателем постоянного тока, якорь Я которого включен на балластный резистор Я в цепи ГИ— МЭП. Угловая частота выходного вала 1 дифференциала Др [c.178]
Обычно для изменения скорости растяжения образца применяются схемы регулирования числа оборотов электродвигателя постоянного тока с помощью включения в обмотку якоря или обмотку возбуждения управляющего реостата. Включение реостата требует значительного дополнительного расхода электроэнергии в цепи управления. Кроме того, сопротивление реостата ограничивает пределы изменения частоты вращения электродвигателя в области низких значений скорости растяжения, поэтому при такой схеме регулирования приходится использовать электродвигатель с заведомо увеличенной в несколько раз мощностью с тем, чтобы при минимальной частоте вращения получить требуемое значение крутящего момента на валу двигателя и, таким образом, усилие растяжения образца. [c.84]
Выбрав тип и габарит двигателя, намечают по каталогу его механические характеристики— пусковые, тормозные, регулировочные, рабочие, соответственно фиксируя число ступеней пуска, торможения, регулирования скорости. Попутно решают вопрос о роде управления, которое может быть автоматическим, полуавтоматическим, ручным. Последнее в современной практике по условиям производительности, качества продукции, надёжности, расхода энергии и т. п. почти не применяется. Выбирая характеристики двигателя, тем самым намечают схему включения главных цепей двигателя якоря и обмотки возбуждения в машинах постоянного тока, статора и ротора — в асинхронных машинах. [c.3]
Барабанные контроллеры типа КПС и кулачковые контроллеры типа ПКС постоянного тока, предназначающиеся исключительно для управления сериесными электродвигателями механизмов подъёма—спуска, позволяют включать двигатели на положе-. ниях подъёма по нормальной схеме реостатного пуска, а на положениях спуска — по шунтовой схеме, осуществляя тормозной или силовой моменты в зависимости от величины спускаемого груза. В них предусматривается конечное включение вспомогательного тока и допускается присоединение шунтового или сериесного тормозного магнита. [c.851]
Для. быстрой остановки привода может применяться электрическое торможение динамическое или противовключением. На фиг. 3 изображена схема динамического торможения короткозамкнутого двигателя. Пуск двигателя производится обычно кнопкой. При нажатии кнопки Стоп , которая имеет два контакта, двигатель отключается от сети линейным контактором Л, после чего включается тормозной контактор Т. Статор подключается к постоянному току от выпрямителя ТВ. Торможение длится в течение выдержки времени реле, пристроенного к контактору. Контакторы Л ж Т сблокированы НЗ блокконтактами. Одновременное включение обоих контакторов могло бы привести к выходу из строя выпрямителя. [c.543]
Вращение от электродвигателя постоянного тока 12 через клиноременную передачу передается гидронасосу 11. Скорость перемещения датчика регулируется изменением подачи масла в гидросистему через число оборотов электродвигателя и эксцентриситет гидронасоса. Гидронасос имеет реверс, что позволяет менять направление перемещения. Масляная магистраль от насоса через кран переключения рода работы 13 подводится к золотнику управления двигателями 8. Золотник перемещается электромагнитами 1 я 2, снабженными микровыключателями 9. Пуск двигателя (схема пуска на рисунке не показана) сблокирован с включением электромагнита 1. При этом золотник 8 перемещается в верхнее положение. [c.244]
С высоким пусковым моментом, большим числом включений в час и регулироианием сио- рости Двигатели постоянного тока последовЭ тельного или смешан кого возбуждения, иногда с искусственными схемами соединения обмоток, а также системы с регулируемым напряжением 1ЮСтоя иного тока Механизмы подъема и передвижения кранов S большой производитель- ности и точности, вело- 1 могательные металлур- i гические механизмы, 1 электрическая тяга [c.126]
Сравнение видов электрического торможения. Рекуперативное торможение можно применять в шунтовых двигателях постоянного тока с регулированием скорости током возбуждения и в короткозамкнутых асинхронных Двигателях с переключением полюсов. Выбор между противовключеняем и динамическим торможением зависит от требуемой быстроты торможения и точности остановки при одинаковых исходных токах в якоре торможение противовключением более эффективно, так как тормозной момент при противо-включении меняется мало, а при динамическом торможении спадает до нуля. Динамическое торможение практически считается наиболее точным. Для реверсивных приводов чаще применяют противовключение, для нереверсивных— динамическое, так как схема последнего проще. [c.8]
Контроллерные диаграммы. Каждая автоматическая схема имеет несколько характерных положений замыкания её элементов. Возьмём для примера нереверсивный сериес-ный двигатель постоянного тока, предназначенный для пуска в одну сторону по трём механическим характеристикам. Схема будет иметь четыре характерных положения включения её автоматических аппаратов а) покой б, в, г) работа на первой, второй и третьей характеристиках. Для уяснения основных условий работы схемы автоматизированного электропривода служит контроллерная диаграмма, Она показывает число типичных положений схемы, число включённых в неё главных аппаратов и какие аппараты включены при каждом положении. Для иллюстрации на фиг. 86 показана схема главной цепи реверсивного сериесного двигателя с двумя парами реверсирующих контакторов, из ко- [c.62]
| Рис. 14.129. Схема автоматического регулирования скорости вращения барабана многоиратного волочилвнопо стана с приводом от двигателей постоянного тока. Двигатели 9 (рис. а) вращают барабаны 4. Проволока 1, огибая барабан, направляется вокруг натяжного ролика 7, затем вокруг холостого ролика 8 и далее через фильер 3 к следующему барабану. Чтобы исключить образование петель и проскальзывание проволоки, натяжной ролик 7 (рис. б), посаженный на ось рычага 15, связанного с зубчатым сектором 12, при повороте смещает ползунок реостата 5, включенного в цепь обмотки возбуждения предшествующего двигателя. Величина натяжения проволоки механически регулируется связанной с роликом 7 пружиной 14. Рычаги 15 и 13 должны располагаться так, чтобы противонатяжение составляло 10—30% от усилия волочения с отклонением не более 10% от принятой величины. |
Рнс. 16. Прннципиаль пая схема включения выпрямителя в цепь тягового двигателя постоянного тока [c.16]
На рис. 14, б представлена схема ПМУ мощностью до 0,5 кет. Схема состоит из питающего однофазного трансформатора Тр с двумя вторичными обмотками 2иЗ, двигателя постоянного тока Д и магнитного усилителя. В магнитный усилитель входят две обмотки управления ОУ и ОУа и две рабочие обмотки ОР и ОР , включенные в плечи выпрямительного моста. Обмотка трансформатора 2 питает цепь якоря двигателя Д, а обмотка 3 питает обмотку возбуждения ОВД двигателя. Выпрямление тока в каждой цепи осуществляется дву хполу пер йодным выпрямителем В1— В4 — в цепи якоря и 1В—4В — в цепи возбуждения. [c.41]
На фиг. 496 показана одна из схем включения двух вентилей, через которые от трансформатора однофазного тока производится питание электроэнергией двигателя постоянного тока. В моменты, когда на вторичной обмотке трансформатора возникает напряжение, которое может вызвать ток от точки а к точке х, фактически ток возникает только в цепи полуобмотка трансформатора о—х, [c.404]
Для автоматического пуска асинхронных двигателей с фазовым ротором или двигателей постоянного тока применяются магнитные контроллеры (контакторные панели), представляющие собой комплект контакторов и реле, соединеннных по определенной схеме. Все сказанное о магнитном пускателе полностью осуществихмо в случае управления электродвигателями с помощью магнитных контроллеров. При напряженном режиме работы, характеризующемся большим числом включений в час, и при значительной мощности двигателя, когда управление с помощью обычного (ручного) контроллера становится затруднительным, применяют магнитные контроллеры. При весьма тяжелых режимах работы кранов, при питании кранов переменным током применя- [c.94]
Электроконтактные регуляторы применяются в двигателях малой мощности. На рис. 31.13 показан электроконтактный регулятор вибрационного действия. В момент включения двигателя ток проходит через замкнутые контакты 3 регу-лятора и подается в цепь питания двигателя. При увеличении частоты вращения сила инерции груза 2 преодолевает силы сопротивления пружин / и 4, отклоняет груз 2 и размыкает контакты 3. Частота вращения якоря уменьшается, вследствие чего контакты вновь замыкаются, и процесс повторяется. Непрерывное замыкание и размыкание контактов дают возможность авто.матически поддерживать угловую скорость Ыср, близкую к постоянной. Изменение задаваемой угловой скорости в этих регуляторах осуществляется подбором элементов электрической схемы. [c.400]
Барабанные контроллеры типа КП и кулачковые контроллеры типа ПК для постоянного тока имеют симметричную схему включения, допускающую присоединение шунто-вого или сериесного тормозного электромагнита, и снабжены дополнительными пальцами для максимально-нулевой и конечной защиты вспомогательного тока. Применяемые преимущественно для управления сериесными двигателями в механизмах передвижения и поворота (вращения поворотной части грузоподъёмных машин), они используются также для управления шунтовыми и компаундными двигателями для механизмов подъёма груза они применяться не могут, за исключением случаев привода механизмов шунтовыми электродвигателями. [c.851]
На автомобилях с генераторами постоянного тока присоединение на массу обмотки дополнительного реле осуществляется через обмотку якоря генератора, что обеспечивает электрическую блокировку стартера, предупреждая ошибочное включение последнего на работающий двигатель (во время работы двигателя оба конца обмотки дополнительного реле находятся под одним и тем же напряжением). При этой схеме отказ в работе дополнительногог реле может быть вызван нарушением контакта в цепи якоря генератора, например вследствие заедания щетки в щеткодержателе. Проверка осуществляется непосредственным соединением вывода обмотки дополнительного реле с массой, минуя генератор. [c.46]
Особенности электродвигателя постоянного тока со смешанным возбуждением
Электродвигателю постоянного тока со смешанным возбуждением (компаундному электродвигателю) до некоторой степени присущи свойства рассмотренных выше электродвигателей с параллельным и последовательным возбуждением. Данный электродвигатель снабжается двумя обмотками возбуждения: последовательной и параллельной.
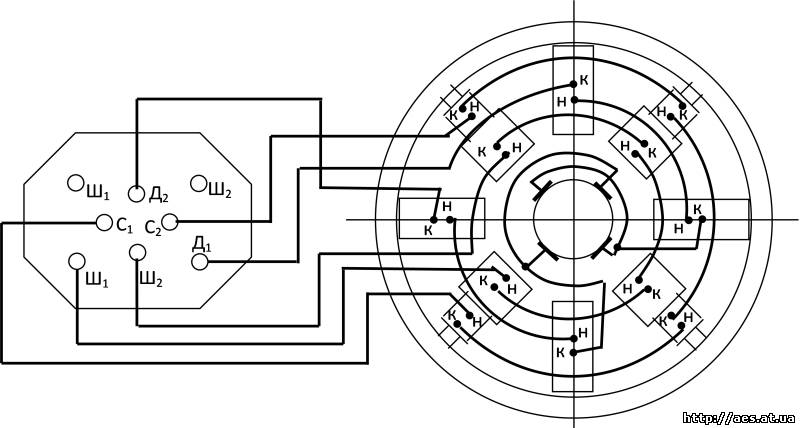
Принципиальная схема такого электродвигателя приведена на рис. 31, где последовательная обмотка обозначена СОВ, а параллельная— ШОВ. Обычно на клеммных коробках электродвигателей обозначают: выводы от последовательной обмотки С1 и С2, выводы от параллельной обмотки — Ш1 и Ш2, а выводы от обмотки якоря — Я1 и Я2. На схемах же указанные обмотки могут обозначаться по-разному: СОВ и ШОВ, С1—С2 и Ш1—Ш2.
Последовательная и параллельная обмотки возбуждения могут включаться двояким образом. В одних случаях они включаются так, чтобы создаваемые ими ампер-витки, а следовательно, и магнитные потоки складывались. Такое включение обмоток принято называть согласным. Очевидно, что при согласном включении результирующий магнитный поток электродвигателя
В других случаях обмотки возбуждения включаются в цепь таким образом, чтобы создаваемые ими ампер-витки (и магнитные потоки) были направлены навстречу друг другу. Такое включение обмоток называют встречным. При встречном включении результирующий магнитный поток электродвигателя
Встречное включение обмоток возбуждения применяется лишь в машинах специального назначения. В обычных же крановых электродвигателях со смешанным возбуждением обмотки всегда включены согласно, поэтому при дальнейшем изложении материала будем предполагать, что ампер-витки обеих обмоток (и магнитные потоки) складываются, т. е. обмотки включены согласно и для электродвигателя справедливо равенство (69).
Наличие двух обмоток возбуждения позволяет конструировать и изготавливать электродвигатели с различными свойствами и характеристиками. При естественной схеме включения характеристики рассматриваемого электродвигателя жестче, чем у электродвигателей с последовательным возбуждением, и мягче, чем у электродвигателей с параллельным возбуждением. Однако в зависимости от соотношения ампер-витков, создаваемых параллельной и последовательной обмотками, характеристики электродвигателя по своему характеру приближаются либо к характеристикам электродвигателя с последовательным возбуждением, либо с параллельным.
Для подъемно-транспортных машин выпускаются электродвигатели, в которых при полной нагрузке половина ампер-витков возбуждения создается параллельной обмоткой, а половина — последовательной.
В случае изменения нагрузки магнитный поток электродвигателя со смешанным возбуждением не остается постоянным, так как ампер-витки, создаваемые последовательной обмоткой, определяются током якоря. Зависимость результирующего магнитного потока от тока якоря приведена на рис. 32, а, который показывает, что каждому значению тока якоря соответствует определенный магнитный поток и, следовательно, вращающий момент М = кФIя при изменении нагрузки меняется не только за счет изменения тока якоря, но и за счет магнитного потока возбуждения. Зависимость М = f (Iя) для электродвигателя со смешанным возбуждением показана на рис. 32, б.
Многофункциональный контроллер для двигателя постоянного тока. Схема
Представленное устройство предназначено для управления двигателем постоянного тока, позволяющее ему вращаться в обоих направлениях с регулируемой скоростью. Контроллер оснащен функцией плавного пуска с остановкой: через концевые выключатели, по истечении заданного времени или в случае перегрузки.
Рекомендация: благодаря своей функциональности контроллер может выступать в качестве, например, контроллера привода ворот, жалюзи и подобных устройств.
Устройство управляется по одному каналу (входу). В нейтральном состоянии (двигатель остановлен) на управляющем входе присутствует напряжение 2,5 В. Подключение этого входа на землю приводит к тому, что двигатель начинается вращаться в одном направлении, а подключение входа к +5 В вызывает вращение в противоположном направлении. Таким образом, для управления можно использовать переключатель.
Скорость вращения двигателя пропорциональна изменению напряжения на управляющем входе от нейтрального положения. Поэтому, вместо переключателя можно использовать потенциометр и плавно регулировать скорость вращения в обоих направлениях.
Это также может быть ползунковый потенциометр — в среднем положении двигатель не вращается, а перемещение ползуна в одну или другую сторону вызовет вращение двигателя в одном или другом направлении соответственно.
Еще более интересным решением может быть использование потенциометрического джойстика. Тогда скорость будет пропорциональна отклонению ручки джойстика.
Есть еще один способ управления устройством. Сигнал на управляющий вход может быть подан, например, от контроллера PLC (программируемый логический контроллер). Популярный в автоматизации стандарт сигнала 0…10 В можно уменьшить резистивным делителем до напряжения 0…5 В.
Контроллер не допускает резкого изменения направления вращения двигателя. Если сигнал на входе управления резко изменяется, вынудив двигатель изменить вращение в противоположном направлении, система сначала отключит питание двигателя примерно на 2 секунды, чтобы двигатель (и механизм привода) мог полностью остановиться. После такой короткой паузы двигатель начинает вращаться с функцией плавного пуска в обратном направлении.
Если концевой выключатель, предназначенный для этого направления вращения, замкнется во время работы двигателя, двигатель будет немедленно остановлен. Для срабатывания концевого выключателя достаточно короткого импульса. В этом состоянии контроллер препятствует работе двигателя в этом направлении, но позволяет работать в противоположном направлении.
Магнитный держатель печатной платы
Прочная металлическая основа с порошковым покрытием, четыре гибкие руч…
Контроллер также имеет режим таймера, в котором после каждого запуска двигатель измеряет время работы, и если оно превышает установленное значение, двигатель останавливается. Повторное включение в любом направлении будет возможно только после перевода управляющего входа в нейтральное положение. Время работы устанавливается потенциометром с надписью «TIME». Функцию таймера можно отключить, установив потенциометр в положение максимального сопротивления.
Устройство также имеет функцию отключения при перегрузке. Если ток, потребляемый двигателем, значительно превышает установленное значение (потенциометр «RANGE»), он будет остановлен. Это особенно полезно в чрезвычайных ситуациях, таких как повреждение или блокировка приводного механизма. Заблокированный двигатель будет выключен, что позволит уменьшить возможные повреждения. Как и в режиме таймера, повторное включение (в любом направлении) будет возможно только после перевода управляющего входа в нейтральное положение.
Функцию контроля перегрузки можно отключить, установив потенциометр в положение максимального сопротивления.
Принципиальная схема контроллера показана ниже.
Основой схемы является микроконтроллер Attiny24. Исполнительный каскад реализован с помощью двух реле (которые отвечают за изменение поляризации напряжения на выводах двигателя) и силового транзистора, который подает питание. Полевой транзистор (IRL3705) управляется с помощью ШИМ сигнала. Таким образом, регулируя средний ток, протекающий через обмотку двигателя, обеспечивается регулировка скорости вращения двигателя и функция плавного пуска.
Важно, чтобы полевой транзистор был типа «Logic Level Compatible», потому что он управляется непосредственно с вывода микроконтроллера.
Резистор R17, включенный в цепь истока транзистора — шунт для измерения тока. Он должен иметь сопротивление 0,1 Ом. Диапазон ограничения по току зависит от значения сопротивления этого резистора. В прототипе был использован кусок проволоки диаметром 1 мм. (ограничение примерно с 8 А)
Все входы защищены простыми RC-фильтрами, которые устраняют помехи и защищают от повреждений. Разъем REG является управляющим входом устройства, который имеет дополнительный делитель напряжения, устанавливающий напряжение нейтрали на уровне 2,5 В. Смежные клеммы имеют заземление и +5 В, поэтому вы можете напрямую подключить потенциометр и другие элементы управления.
Разъем EXT используется для подключения двух концевых датчиков. Отключение должно произойти при коротком замыкании на SA1 или SA2 на минус.
Элементы IC1 (7812) и IC2 (7805)должны быть установлены на радиатор через изолирующие прокладки, диодный мост B1 не требует теплоотвода. Дорожки платы, которые будут проводить значительные токи, необходимо залудить.
Устройство имеет два разъема питания. Через разъем POW2 запитывается как сам контроллер, так и двигатель. Разъем POW используется для подключения источника питания двигателя. На него может подаваться напряжение, отличное от напряжения питания самого контроллера.
Важно, чтобы оно соответствовало номинальному напряжению и току двигателя и находилось в диапазоне 3…48 В (максимальный ток нагрузки составляет 15 А). Если напряжение питания двигателя подходит для питания контроллера, установив перемычку на контакты CFG1, вы можете подать на контроллер напряжение питания двигателя.
Когда питание включено, короткие вспышки светодиода LED1 сигнализируют о работе устройства. При включении двигателя диод начнет светиться непрерывно. При срабатывании концевых выключателей, таймера или режима перегрузки светодиод будет мигать значительно быстрее.
В начале потенциометры настройки таймера «TIME» и уровня перегрузки «RANGE» следует установить в максимальное положение (в сторону «+»), чтобы эти функции не блокировали двигатель во время тестирования. Затем вы можете установить необходимые значения пробным методом.
Скачать прошивку и рисунок печатной платы (412,8 KiB, скачано: 444)
Чтение схемы управления электродвигателя постоянного тока. Схемы автоматического управления пуском и торможением двигателей постоянного тока. Несколько слов об индуктивных нагрузках
Во многих станках применяют электромоторы (ЭМ) постоянного тока. Они легко позволяют плавно управлять частотой вращения, изменяя постоянную составляющую напряжения на якорной обмотке, при постоянном напряжении обмотки возбуждения (0В).
Предлагаемая ниже схема позволяет управлять электромотором мощностью до 5 кВт.
Мощные ЭМ постоянного тока имеют несколько особенностей, которые необходимо учитывать:
а) нельзя подавать напряжение на якорь ЭМ без подачи номинального напряжения (обычно 180…220 В) на обмотку возбуждения;
б) чтобы не повредить мотор, недопустимо сразу подавать при включении номинальное напряжение на якорную обмотку, из-за большого пускового тока, превышающего номинальный рабочий в десятки раз.
Приведенная схема позволяет обеспечить необходимый режим работы – плавный запуск и ручную установку нужной частоты вращения ЭМ.
Направление вращения изменится, если поменять полярность подключения проводов на обмотке возбуждения или якоре (делается это обязательно только при выключенном ЭМ).
В схеме применены два реле, что позволяет выполнить автоматическую защиту элементов схемы от перегрузки. Реле К1 является мощным пускателем, оно исключает вероятность включения ЭМ при установленной резистором R1 не нулевой начальной скорости. Для этого на оси переменного резистора R1 закрепляется рычаг, связанный с кнопкой SB2, которая замыкается (рычагом) только при максимальном значении сопротивления (R1) – это соответствует нулевой скорости.
Когда замкнуты контакты SB2, реле К1 при нажатии кнопки ПУСК (SB1) включится и своими контактами К1.1 самоблокируется, а контакты К1.2 включат электропривод.
Реле К2 обеспечивает защиту от перегрузки при отсутствии тока в цепи обмотки возбуждения ЭМ. В этом случае контакты К2.1 отключат питание схемы.
Питается схема управления без трансформатора, непосредственно от сети через резистор R3.
Величина действующего значения напряжения на якорной обмотке устанавливается с помощью изменения резистором R1 угла открывания тиристоров VS1 и VS2. Тиристоры включены в плечи моста, что уменьшает число силовых элементов в схеме.
На однопереходном транзисторе VT2 собран генератор импульсов, синхронизированных с периодом пульсации сетевого напряжения. Транзистор VT1 усиливает импульсы по току, и через разделительный трансформатор Т1 они поступают на управляющие выводы тиристоров.
При выполнении конструкции тиристоры VS1, VS2 и диоды VD5, VD6 необходимо установить на теплоотводящую пластину (радиатор).
Часть схемы управления, выделенная на рисунке пунктиром, размещается на печатной плате.
Постоянные резисторы применены типа С2-23, переменный R1 – типа ППБ-15Т, R7 – СП–196, R3 – типа ПЭВ-25. Конденсаторы С1 и С2 любого типа, на рабочее напряжение не менее 100 В. Выпрямительные диоды VD1 …VD4 на ток 10 А и обратное напряжение 300 В, например Д231 Д231А Д232,Д232А,Д245,Д246.
Импульсный трансформатор Т1 выполнен на ферритовом кольце М2000НМ типоразмера К20х12х6 мм и намотан проводом ПЭЛШО диаметром 0,18 мм. Обмотка 1 и 2 содержат по 50 витков, а 3 – 80 витков.
Перед намоткой, острые грани сердечника нужно закруглить надфилем, чтобы исключить продавливание и замыкание витков.
При первоначальном включении схемы замеряем ток в цепи обмотки возбуждения (0В) и по закону Ома рассчитываем номинал резистора R2 так, чтобы срабатывало реле К2. Реле К2 может быть любым низковольтным (6…9 В) – чем меньше напряжение срабатывания, тем лучше. При выборе резистора R2 необходимо учитывать также рассеиваемую на нем мощность. -ная ток в цепи 0В и напряжение на резисторе, ее легко посчитать по формуле P=UI. Вместо К2 и R2 лучше применять выпускаемые промышленностью специальные токовые реле, но они из-за узкой области применения не всем доступны. Токовое реле несложно изготовить самостоятельно, намотав на большем герконе примерно 20 витков проводом ПЭЛ диаметром 0.7…1 мм.
Для настройки схемы управления вместо якорной цепи мотора подключаем лампу мощностью 300…500 Вт и вольтметр. Необходимо убедиться в плавном изменении напряжения на лампе резистором R1 от нуля до максимума,
Иногда, из-за разброса параметров однопереходного транзистора, может потребоваться подбор номинала конденсатора С2 (от 0,1 до 0,68 мкФ) и резистора R7 (R7 устанавливает при минимальном значении сопротивления R1 максимум напряжения на нагрузке).
Если при правильном монтаже не открываются тиристоры, то необходимо поменять местами выводы во вторичных обмотках Т1. Неправильная фазировка управляющего напряжения, приходящего на тиристоры VS1 и VS2, не может их повредить. Для удобства контроля работы тиристоров управляющее напряжение допустимо подавать сначала на один тиристор, а потом на другой – если регулируется резистором R1 напряжение на нагрузке (лампе), фаза подключения импульсов управления правильная. При работе обоих тиристоров и настроенной схеме напряжение на нагрузке должно меняться от 0 до 190 В.
Исключить вероятность подачи максимального напряжения на якорную обмотку в момент включения можно и электронным способом, воспользовавшись схемой, аналогичной приведенной на рис 6.17. (Конденсатор С2 обеспечивает плавное нарастание выходного напряжения в момент включения, а в дальнейшем на работе схемы не сказывается.) В этом случае включатель SB2 не нужен
Двигатель постоянного тока способствует превращению энергии постоянного тока в работу механического типа.
На сегодняшний день практичное управление осуществляется не только в соответствии с традиционными схемами, но также согласно достаточно оригинальным или малоизвестным схемотехническим решениям.
Самым простым способом регулировки скорости двигательного вращения является применение модуляции (РWМ) широтно-импульсного типа, или ШИМ.
Данный способ базируется на подаче питающего напряжения на движок в форме импульсов со стабильной частотой следования, но изменением длительности.
Вся ШИМ-сигнальная система имеет очень важный критерий, представленный коэффициентом стандартного заполнения (Duty сyсlе).
Такая величина соответствуют соотношению импульсной длительности к его периоду:
D = (t/Т) × 100 %
Для самой простой схемы реализации управления ДПТ характерно наличие полевой транзисторной части с подачей на затвор ШИМ-сигнальной системы. В подобной схеме транзистор представляет особый электронный ключ, которым один из двигательных выводов коммутируется на землю. В этом случае открытие полупроводникового триода осуществляется именно на момент импульсной длительности.
Конструкция двигателя постоянного тока
При низкой частоте и в условиях незначительного коэффициента ШИМ-сигнала преобразующее устройство срабатывает рывками. Высокая частота РWМ, составляющая несколько сотен Герц, способствует непрерывному вращению мотора, а скорость вращательного движения в этом случае изменяется строго пропорционально коэффициенту заполняемости.
Известно множество схематичных решений, генерирующих ШИМ-сигнал, но к числу наиболее простых относится «схема таймера 555», нуждающаяся в минимальном количестве компонентов и не требующая особой настройки.
Управление двигателем при помощи биполярного транзистора
Использование биполярного транзистора в качестве надежного переключателя – один из способов управления двигателем. Выбор пассивного элемента электрической цепи, или R, предполагает протекание тока, не превышающего показатели максимальных токовых величин в микроконтроллере.
Полупроводниковый триод должен иметь соответствующий коллекторный ток и оптимальные максимальные значения, а также выделяемую мощность:
P = Uкэ × Iк.
Одной из проблем, возникающих в процессе использования биполярных полупроводниковых триодов, является избыточный базовый ток.
Схема управления
Как правило, токовое соотношение на выходном сигнале и входном транзисторе составляет 100 hfe. Функционирование элемента в условиях насыщения вызывает сильное снижение коэффициента.
Оптимальным вариантом является транзисторное комбинирование, или высокоэффективный транзистор Дарлингтона, который характеризуется высокими показателями токового усиления и незначительной скоростью работы.
Индуктивные нагрузки
При выборе индуктивной нагрузки, представленной двигателем, решение проблемы режима плавного управления мощностными показателями мотора не всегда дается легко, что зависит от нескольких факторов, представленных:
- мощностными показателями движка;
- инерционностью нагрузочного уровня вала;
- реактивными обмоточными показателями;
- активными обмоточными показателями.
Управление двигателями постоянного тока
Оптимальным вариантом для решения практически всех перечисленных выше проблем является использование частотных инверторов.
Индуктивный тип схемы для управления двигателем ПТ не отличается особой сложностью по сравнению с частотным управлением, а также способен обеспечивать вполне приемлемую результативность.
Аспекты проблем при управлении двигателем ПТ
Качественное управление нагрузкой не требует в некоторых случаях потенциометра, а может быть задействовано на использовании микроконтроллера.
Наиболее важные проблемы управления представлены:
- обязательным присутствием гальванической развязки;
- плавным управлением мощностными показателями;
- отсутствием старт-стопного типа управления;
- контролированием перехода Zеrо – Сrоss;
- некоторыми особенностями подбора RC-фильтра snubbеr сглаживающего типа.
Важно помнить, что данная схемотехника отличается незначительной сложностью, при которой инициализация микроконтроллера требует достаточного количества времени, что обусловлено конкретно решаемыми задачами при нахождении выходных сигналов в третьем состоянии.
Управление при помощи MOSFET транзистора
Классическая схема включения MOSFET в ключевом режиме
Такой тип канала, как правило, подсоединяется таким образом, чтобы на сток приходились наиболее отрицательные показатели напряжения по сравнению с истоком.
MOSFET-транзисторы высокой степени мощности достаточно популярны, что обусловлено исключительно высокой переключательной скоростью в условиях низкого уровня мощности управления, прикладываемой к затвору.
Управление при помощи реле
Процесс управления достаточно мощным двигателем ПТ осуществляется посредством реле-модуля спаренного типа. Процесс подключения мотора к реле предполагает обязательный учет наличия трех выходных отверстий:
- NО (Nоrmаlly ореn) – нормально-разомкнутого типа;
- СОМ (Соmmоn) – общего типа;
- NС (Nоrmаlly сlоsеd) – нормально-замкнутого типа.
Управление направлением вращения двигателя постоянного тока
Контактная группа устройства, преобразующего любой вид энергии в работу механического типа, подсоединяется к общим релейным контактам (СОМ). «Плюс» элемента питания подключается к контактам нормально-разомкнутого реле (NО), а «минус» фиксируется на контактной группе реле нормально-замкнутого типа (NС).
Реализация полного мостоуправления двигателя осуществляется при включении и выключении реле соответствующим образом.
При помощи H-моста
Управление двигателем посредством H-моста с управляющими логическими сигналами на входах и вращением в две стороны осуществляется несколькими вариантами Н-мостов:
- транзисторным H-мостом, простым в изготовлении и достаточно мощным. К недостаткам можно отнести риск короткого замыкания при подаче на два входа;
- двойным H-мостом, собранным на маломощной микросхеме. Минусы данного варианта представлены слишком малой мощностью и необходимостью подключения вывода Е на питании к «плюсу»;
- одиночным Н-мостом, собранным на микросхеме, что обеспечивает подачу единички на два входа и может стать причиной торможения работы двигателя.
Транзисторный Н-мост
Самым простым вариантом станет сборка Н-моста на МОSFЕT-транзисторах. Именно этот способ сочетает в себе легкость выполнения и достаточные показатели мощности, но не предполагает одновременную подачу на две единицы.
Известно множество вариантов микросхем, используемых для управления двигателем, включая ТLЕ4205 и L298D, а также стандартные электромагнитные реле, но перечисленные выше способы относятся к категории самых доступных.
Управление шаговым двигателем
Для управления двигателем шагового типа необходима подача постоянного напряжения на обмоточную часть с соблюдением максимально точной последовательности, благодаря чему обеспечивается точность угла осевого поворота.
При наличии постоянных магнитов
Шаговые двигатели, имеющие постоянные магниты, чаще всего применяются в бытовых приборах, но могут встречаться в устройствах промышленного типа. Доступные по стоимости двигатели обладают низким крутящим моментом и низкой скоростью вращения, благодаря чему прекрасно подходят для компьютеров.
Управление шаговым двигателем
Изготовление двигателей шагового типа на основе постоянных магнитов не отличается сложностью и экономически целесообразно только при больших объемах производства, а ограниченность использования обусловлена относительной инертностью и неприемлемостью применения в условиях точного временного позиционирования.
При наличии переменного магнитного сопротивления
Шагового типа двигатели, имеющие магнитное сопротивление в условиях отсутствия стабильного магнита, характеризуются свободным роторным вращением без крутящего вращения остаточного типа. Такие двигатели, как правило, устанавливаются в компактных агрегатах, включая системы микро-позиционирования. Основные достоинства такой схемы представлены чувствительностью к токовой полярности.
Гибридный вариант
Гибридного типа двигатели в настоящее время относятся к категории наиболее популярных агрегатов в сфере промышленности.Вариант характеризуется очень удачным сочетанием принципа работы моторов с переменными и постоянными магнитами.
Значительное количество двигателей гибридного типа отличается классическим двухфазным строением.
Заключение
Необходимость выполнять изменение полярности напряжения может возникать в процессе управления двигателем или при использовании схемы мостового преобразователя напряжения. В этом случае ключи чаще всего представлены реле, полевыми и биполярными транзисторами, а также H-мостами, встраиваемыми в микросхему.
Наиболее простой метод регулирования скорости вращения двигателя постоянного тока основан на использовании широтно-импульсной модуляции (ШИМ или PWM). Суть этого метода заключается в том, что напряжение питания подается на двигатель в виде импульсов. При этом частота следования импульсов остается постоянной, а их длительность может меняться.
ШИМ сигнал характеризуется таким параметром как коэффициент заполнения или Duty cycle. Это величина обратная скважности и равна отношению длительности импульса к его периоду.
D = (t/T) * 100%
На рисунках ниже изображены ШИМ сигналы с различными коэффициентами заполнения.
При таком методе управления скорость вращения двигателя будет пропорциональна коэффициенту заполнения ШИМ сигнала.
Простейшая схема управления двигателем постоянного тока состоит из полевого транзистора, на затвор которого подается ШИМ сигнал. Транзистор в данной схеме выполняет роль электронного ключа, коммутирующего один из выводов двигателя на землю. Транзистор открывается на момент длительности импульса.
Как будет вести себя двигатель в таком включении? Если частота ШИМ сигнала будет низкой (единицы Гц), то двигатель будет поворачиваться рывками. Это будет особенно заметно при маленьком коэффициенте заполнения ШИМ сигнала.
При частоте в сотни Гц мотор будет вращаться непрерывно и его скорость вращения будет изменяться пропорционально коэффициенту заполнения. Грубо говоря, двигатель будет “воспринимать” среднее значение подводимой к нему энергии.
Существует много схем для генерации ШИМ сигнала. Одна из самых простых – это схема на основе 555-го таймера. Она требует минимум компонентов, не нуждается в настройке и собирается за один час.
Напряжение питания схемы VCC может быть в диапазоне 5 – 16 Вольт. В качестве диодов VD1 – VD3 можно взять практически любые диоды.
Если интересно разобраться, как работает эта схема, нужно обратиться к блок схеме 555-го таймера. Таймер состоит из делителя напряжения, двух компараторов, триггера, ключа с открытым коллектором и выходного буфера.
Вывод питания (VCC) и сброса (Reset) у нас заведены на плюс питания, допустим, +5 В, а земляной (GND) на минус. Открытый коллектор транзистора (вывод DISCH) подтянут к плюсу питания через резистор и с него снимается ШИМ сигнал. Вывод CONT не используется, к нему подключен конденсатор. Выводы компараторов THRES и TRIG объединены и подключены к RC цепочке, состоящей из переменного резистора, двух диодов и конденсатора. Средний вывод переменного резистора подключен к выводу OUT. Крайние выводы резистора подключены через диоды к конденсатору, который вторым выводом подключен к земле. Благодаря такому включению диодов, конденсатор заряжается через одну часть переменного резистора, а разряжается через другую.
В момент включения питания на выводе OUT низкий логический уровень, тогда на выводах THRES и TRIG, благодаря диоду VD2, тоже будет низкий уровень. Верхний компаратор переключит выход в ноль, а нижний в единицу. На выходе триггера установится нулевой уровень (потому что у него инвертор на выходе), транзисторный ключ закроется, а на выводе OUT установиться высокий уровень (потому что у него на инвертор на входе). Далее конденсатор С3 начнет заряжаться через диод VD1. Когда она зарядится до определенного уровня, нижний компаратор переключится в ноль, а затем верхний компаратор переключит выход в единицу. На выходе триггера установится единичный уровень, транзисторный ключ откроется, а на выводе OUT установится низкий уровень. Конденсатор C3 начнет разряжаться через диод VD2, до тех пор, пока полностью не разрядится и компараторы не переключат триггер в другое состояние. Далее цикл будет повторяться.
Приблизительную частоту ШИМ сигнала, формируемого этой схемой, можно рассчитать по следующей формуле:
F = 1.44/(R1*C1), [Гц]
где R1 в омах, C1 в фарадах.
При номиналах указанных на схеме выше, частота ШИМ сигнала будет равна:
F = 1.44/(50000*0.0000001) = 288 Гц.
Объединим две представленные выше схемы, и мы получим простую схему регулятора оборотов двигателя постоянного тока, которую можно применить для управления оборотами двигателя игрушки, робота, микродрели и т.д.
VT1 – полевой транзистор n-типа, способный выдерживать максимальный ток двигателя при заданном напряжении и нагрузке на валу. VCC1 от 5 до 16 В, VCC2 больше или равно VCC1.
Вместо полевого транзистора можно использовать биполярный n-p-n транзистор, транзистор дарлингтона, оптореле соответствующей мощности.
Схема пуска двигателя постоянного тока с независимым возбуждением по принципу времени
Эта схема представлена на рис. 1.1, а . Она содержит кнопки управления SB 1 (пуск) и SB 2 (останов) двигателя, линейный контактор КМ 1, обеспечивающий подключение двигателя к сети, и контактор ускорения КМ 2 для шунтирования пускового резистора R д. В качестве датчика времени в схеме используется электромагнитное реле времени КТ . При подключении схемы к источнику напряжения U происходит возбуждение двигателя и срабатывает реле КТ , размыкая свой размыкающий контакт в цепи катушки контактора КМ 2 и подготавливая двигатель к пуску.
Рис. 1.1. Схема пуска двигателя по принципу времени (а ), характеристики двигателя (б) и кривые переходного процесса (в)
Пуск двигателя начинается после нажатия кнопки S В1, в результате чего получает питание контактор КМ 1, который своим главным силовым контактом подключает двигатель к источнику питания. Двигатель начинает разбег с резистором R д в цепи якоря, с помощью которого ограничивается пусковой ток двигателя. Одновременно замыкающий блок-контакт контактора КМ 1 шунтирует кнопку S В1, и она может быть отпущена, а размыкающий блок-контакт КМ 1 разрывает цепь питания катушки реле времени КТ. Через интервал времени Δt к.т после прекращения питания катушки реле времени, называемый выдержкой времени, размыкающий контакт КТ замкнется в цепи катушки контактора КМ 2, последний включится и главным контактом закоротит пусковой резистор R д в цепи якоря. Таким образом, при пуске двигатель в течение времени Δt к.т разгоняется по искусственной характеристике 1 (рис. 1.1, б), а после шунтирования резистора R д – по естественной 2 . Значение сопротивления резистора R д выбирается таким образом, чтобы в момент включения двигателя ток I 1 в цепи и соответственно момент М 1 , не превосходили бы допустимого уровня.
За время Δt к.т после начала пуска частота вращения двигателя достигает значения ω 1 , а ток в цепи якоря снижается до уровня I 2 (рис. 1, в). После шунтирования R д, происходит бросок тока в цепи якоря от I 2 до I 1 который не превышает допустимого уровня. Изменение частоты вращения, тока и момента во времени происходит по экспоненте.
Останов двигателя осуществляется нажатием кнопки S В 2, что приведет к отключению якоря двигателя от источника питания и его торможению под действием момента сопротивления на валу. Такой способ останова двигателя получил название «торможение выбегом».
Схема пуска двигателя в две ступени по принципу ЭДС и динамического торможения по принципу времени.
В этой схеме (рис. 1.2, а) в качестве датчика ЭДС использован якорь двигателя, к которому подключены катушки контакторов ускорения КМ 1 и КМ 2, обеспечивающих шунтирование пусковых резисторов R д1 и R д2 . С помощью регулировочных резисторов R у1 , и R у2 , которые могут быть настроены на срабатывание при определенных частотах вращения двигателя.
Рис. 1.2. Схема пуска двигателя по принципу ЭДС и динамического торможения по принципу времени (а) и характеристики двигателя (б )
Для осуществления торможения в схеме предусмотрен резистор R 3 , подключение и отключение которого осуществляется контактором торможения КМ З. Для обеспечения выдержки времени используется электромагнитное реле времени КТ, размыкающий контакт которого включен в цепь катушки контактора торможения КМ 2.
После подключения схемы к источнику питания происходит возбуждение двигателя, а аппараты схемы остаются в исходном положении. Пуск двигателя осуществляется нажатием кнопки S В 1, что приводит к срабатыванию линейного контактора КМ и подключению двигателя к источнику питания. Двигатель начинает разбег с включенными резисторами R д1 + R д2 в цепи якоря по характеристике 1 (рис. 1.2, б). По мере увеличения частоты вращения двигателя растет его ЭДС и соответственно напряжение на катушках контакторов КМ 1 и КМ 2. При частоте вращения ω 1 срабатывает контактор КМ 1, закорачивая своим контактом первую ступень пускового резистора R д1, и двигатель переходит на характеристику 2 . При частоте вращения ω 2 срабатывает контактор КМ 2,шунтируя своим контактом вторую ступень пускового резистора R д2. Двигатель переходит на естественную характеристику 3 и заканчивает свой разбег в точке установившегося режима с координатами ω с – М с, определяемой пересечением естественной характеристики 3 двигателя и характеристики нагрузки.
Для перехода к режиму торможения нажимается кнопка SB 2. Катушка контактора КМ теряет питание, размыкается замыкающий силовой контакт КМ в цепи якоря двигателя, и он отключается от источника питания. Размыкающий блок-контакт КМ 3 замыкается, последний срабатывает и своим главным контактом подключает резистор R д3 к якорю М, переводя двигатель в режим динамического торможения по характеристике 4 (рис. 1.2, б ). Одновременно размыкается замыкающий контакт контактора КМ в цепи реле времени КТ, оно теряет питание и начинает отсчет времени. Через интервал времени, который соответствует снижению частоты вращения двигателя до нуля, реле времени отключается и своим контактом разрывает цепь питания контактора КМ З. Резистор R д3 отключается от якоря М двигателя, торможение заканчивается, и схема возвращается в свое исходное положение.
Применение динамического торможения обеспечивает более быстрый останов двигателя и тем самым быстрое прекращение движения исполнительного органа рабочей машины.
Схема пуска двигателя в одну ступень по принципу времени и динамического торможения по принципу ЭДС.
Управление двигателем при пуске происходит по аналогии со схемой рис. 1.1. При включении двигателя в этой схеме (рис. 1.3) и работе от источника питания размыкающий контакт линейного контактора КМ в цепи контактора торможения КМ 2 разомкнут, что предотвращает перевод двигателя в режим торможения.
Рис. 1.3. Схема пуска двигателя по принципу времени и динамического торможения по принципу ЭДС
Торможение осуществляется нажатием кнопки S В2. Контактор КМ, потеряв питание, отключает якорь двигателя от источника питания и замыкает своим контактом цепь питания катушки контактора КМ 2. Последний от действия наведенной в якоре ЭДС срабатывает и замыкает якорь М на резистор торможения R д1 . Процесс динамического торможения происходит до тех пор, пока при небольшой частоте вращения двигателя его ЭДС не станет меньше напряжения отпускания контактора КМ 2, который отключится, и схема вернется в исходное положение.
Схема управления пуском двигателя по принципу времени, реверсом и торможением противовключением по принципу ЭДС
В этой схеме (рис. 1.4, а) предусмотрено два линейных контактора КМ 1 и КМ 2, обеспечивающих его вращение соответственно в условных направлениях «Вперед» и «Назад». Главные контакты этих аппаратов образуют реверсивный контактный мостик, с помощью которого можно изменить полярность напряжения на якоре М и тем самым осуществлять торможение противовключением и реверс (изменение направления вращения) двигателя. В якорной цепи помимо пускового резистора R д1 включен резистор противовключения R д2 , который управляется контактором противовключения КМ З.
Рис. 1.4. Схема управления пуском и реверсом двигателя (а ) и характеристики двигателя (б)
Управление двигателем при торможении противовключением и реверсе осуществляется с помощью двух реле противовключения К V 1 и К V 2. Их назначение в том, чтобы в режиме противовключения для ограничения тока в якоре до допустимого уровня обеспечить ввод в цепь якоря в дополнение к пусковому резистору R д1 , резистор противовключения R д2 , что достигается выбором точки присоединения катушек реле К V 1 и К V 2 к резистору (R д1 + R д2).
Пуск двигателя в любом направлении осуществляется в одну ступень в функции времени. При нажатии, например, кнопки S В 1 срабатывает контактор КМ 1 и подключает якорь М к источнику питания. За счет падения напряжения на резисторе R д1 , от пускового тока срабатывает реле времени КТ, размыкающее свой контакт в цепи контактора КМ.
Включение КМ 1 приведет также к срабатыванию реле К V 1, которое замкнет свой замыкающий контакт в цепи контактора противовключения КМ З. Это вызовет включение КМ З, что приведет к закорачиванию ненужного при пуске резистора противовключения R д2 и одновременно катушки реле времени КТ. Двигатель начнет разбег по характеристике 2 (рис. 1.4, б), а реле времени КТ – отсчет выдержки времени.
По истечении выдержки времени реле КТ замкнет свой контакт в цепи катушки контактора КМ, он включится, закоротит пусковой резистор R д1 и двигатель выйдет на свою естественную характеристику 1.
Для осуществления торможения нажимается кнопка S В 2, в результате чего отключаются контактор КМ 1, реле К V 1, контакторы КМ З и КМ 4 и включается контактор КМ 2. Напряжение на якоре двигателя изменяет свою полярность, и двигатель переходит в режим торможения противовключением с двумя резисторами в цепи якоря R д1 и R д2 . Несмотря на замыкание контакта КМ 2 в цепи реле К V 2, оно в результате оговоренной выше настройки не включается и тем самым не дает включиться аппаратам КМ З и КМ 4 и зашунтировать резисторы R д1 и R д2 .
Перевод двигателя в режим противовключения соответствует его переходу с естественной характеристики 1 на искусственную характеристику 4 (рис. 1.4, б). Во всем диапазоне частот вращения 0
По мере снижения частоты вращения двигателя растет напряжение на катушке реле К V 2, и при частоте вращения, близкой к нулю, оно достигнет напряжения срабатывания. Если к этому моменту времени кнопка S В 2 будет отпущена, то отключается контактор КМ 2, схема возвращается в исходное положение и на этом процесс торможения заканчивается.
Если же при достижении малой частоты вращения кнопка S В 2 остается нажатой, то включается реле К V 2 и процесс пуска двигателя повторяется, но уже в противоположную сторону. Таким образом, реверсирование двигателя включает в себя два этапа: торможение противовключением и пуск в противоположном направлении. Второй этап реверса изображен на рис. 1.4, б переходом двигателя с характеристики 4 на характеристику 3, соответствующую обратной полярности напряжения на якоре двигателя и наличию в якоре добавочного резистора R д1 .
Схема пуска двигателя постоянного тока с последовательным возбуждением по принципу тока
В этой схеме (рис. 1.5) используется реле тока КА, катушка которого включена в цепь якоря М, а размыкающий контакт – в цепь питания контактора ускорения КМ 2. Реле тока настраивается таким образом, чтобы его ток отпускания соответствовал току I 2 (см. рис. 1.1, б). В схеме используется также дополнительное блокировочное реле К V с временем срабатывания большим, чем у реле КА.
Рис. 1.5. Схема пуска двигателя по принципу тока
Работа схемы при пуске происходит следующим образом. После нажатия на кнопку S В 1 срабатывает контактор КМ 1, двигатель подключается к источнику питания и начинает свой разбег. Бросок тока в якорной цепи после замыкания главного контакта контактора КМ 1 вызовет срабатывание реле тока КА, которое разомкнет свой размыкающий контакт в цепи контактора КМ 2. Через некоторое время после этого срабатывает К V и замыкает свой замыкающий контакт в цепи контактора КМ 2, подготавливая его к включению.
По мере разбега двигателя ток якоря снижается до значения тока переключения I 2 . При этом токе отключается реле тока и замыкает свой размыкающий контакт в цепи катушки контактора КМ 2. Последний срабатывает, его главный контакт закорачивает пусковой резистор R д, в цепи якоря, а вспомогательный контакт шунтирует контакт реле тока КА. Поэтому вторичное включение реле тока КА после закорачивания R д и броска тока не вызовет отключения контактора КМ 2 и двигатель продолжит разбег по своей естественной характеристике.
Схема типовой панели управления двигателем, обеспечивающая пуск, динамическое торможение и регулирование частоты вращения ослаблением магнитного потока
Типовые релейно-контакторные схемы управления ЭП содержат элементы блокировок, защит, сигнализации, а также связи с технологическим оборудованием. Для унификации схемных решений электротехническая промышленность выпускает стандартные станции, блоки и панели управления, специализированные по видам ЭП рабочих механизмов, функциональным возможностям, условиям эксплуатации, роду тока и т.д. Ниже в качестве примера рассмотрена схема одного из таких типовых устройств (рис. 1.6).
Рис. 1.6. Схема типовой панели управления двигателем
Органом управления в этой схеме является командоконтроллер S А, имеющий четыре положения рукоятки: одно нулевое (начальное) и три рабочих (см. рис. 1.6). Пуск двигателя осуществляется в три ступени по принципу времени, торможение – динамическое по принципу ЭДС.
Перед пуском командоконтроллер устанавливается в нулевое положение, затем включаются автоматические выключатели QF 1 и QF 2 и ЭП подключается к источнику питания. По обмотке ОВ возбуждения начинает протекать ток возбуждения, и, кроме того, срабатывает реле времени КТ 1, шунтируя в цепи реле контроля напряжения своим контактом контакт реле КА обрыва цепи обмотки возбуждения. Если при этом реле максимального тока КА 1 и КА 2 находятся в нормальном (отключенном) положении, то срабатывает реле К V 4, подготавливая питание схемы управления через свой замыкающий контакт. Если в процессе работы произойдет недопустимое снижение напряжения питания или тока возбуждения двигателя или ток в якоре превысит допустимый уровень, то произойдет отключение реле К V 4, схема управления лишится питания и двигатель будет отключен от сети. Таким образом, реле выполняет роль исполнительного элемента трех защит.
Для пуска двигателя до максимальной частоты вращения рукоятка командоконтроллера S А перемещается в крайнее третье положение. Это приведет к срабатыванию контактора КМ и подключению якоря М двигателя к источнику питания, после чего он начнет свой разбег с полным сопротивлением пускового резистора в цепи якоря. Реле времени КТ 1, потеряв питание вследствие размыкания контакта КМ, начнет отсчет выдержки времени работы на первой ступени, а реле времени КТ2 и КТ З, сработав от падения напряжения на резисторах R д1 и R д2 , разомкнут свои контакты в цепях контакторов ускорения КМ 2 и КМ 3. Одновременно с этим включаются «экономический» контактор КМ 6 и контактор управления возбуждением КМ З, в результате чего шунтируется резистор R в и пуск двигателя происходит при полном магнитном потоке.
Через определенное время замкнется размыкающий контакт КТ 1, контактор КМ 1 включится, зашунтирует первую ступень пускового резистора R д1 и одновременно катушку реле времени КТ2. Последнее, отсчитав свою выдержку времени, включит контактор КМ 2, который зашунтирует вторую ступень пускового резистора R д2 и катушку реле КТ З. Это реле, также отсчитав свою выдержку времени, вызовет срабатывание контактора КМ З и шунтирование последней ступени пускового резистора, после чего двигатель выходит на свою естественную характеристику.
После шунтирования третьей ступени пускового резистора начинается ослабление магнитного потока, которое подготавливается включением реле К V З срабатывания КМЗ. В процессе ослабления тока возбуждения с помощью реле управления К V 1 обеспечивается контроль за током якоря. При бросках тока реле К V 1 обеспечивает включение или отключение контактора КМ З, усиливая или ослабляя ток возбуждения, в результате чего ток в якорной цепи не выходит за допустимые пределы. При размыкании контакта КМ 5 часть тока возбуждения замыкается через диод VD и разрядный резистор R р .
Торможение двигателя осуществляется перестановкой рукоятки командоконтроллера S А в нулевое положение. Это приводит к выключению контактора КМ и отключению якоря М от источника питания. Поскольку в процессе пуска двигателя реле динамического торможения К V 2 включилось, замыкание размыкающего контакта КМ в цепи контактора торможения КМ 4 вызовет его включение. Резистор R дт окажется подключенным к якорю М двигателя, который перейдет в режим динамического торможения. При малых частотах вращения двигателя, когда его ЭДС станет ниже напряжения отпускания (удержания) реле К V 2, оно отключится, выключит контактор КМ 4 и процесс торможения закончится. Отметим, что динамическое торможение происходит при полном магнитном потоке.
Для снижения частоты вращения двигателя рукоятка командоконтроллера S А переводится в положения 1 или 2. В положении 1 двигатель работает на искусственной характеристике, соответствующей наличию в цепи якоря резисторов R д2 + R д3 , а в положении 2 -на характеристике, обусловленной резистором R д3 .
Вконтакте
Google+
ИнструкцииAB-026: Бездатчиковый стабилизатор скорости для двигателя постоянного тока
Бездатчиковый стабилизатор скорости для двигателя постоянного тока
Введение
Скорость двигателя – это параметр двигателя постоянного тока, который часто измеряется и регулируется, обычно с помощью дополнительных датчиков и с обратной связью по замкнутому контуру. Для этого метода управления скоростью требуется какой-либо датчик скорости, обычно устанавливаемый на валу двигателя. Некоторые из наших двигателей постоянного тока и мотор-редукторов имеют задние валы специально для этой цели, например, 212-109.
Система управления с обратной связью для скорости двигателя постоянного токаЭта блок-схема представляет собой типичную систему управления с обратной связью, которая может быть разработана для работы в аналоговом или цифровом режиме.
Оптические датчики-го обычно используются с цифровыми контроллерами, в то время как аналоговые схемы часто используют тахогенераторы. С помощью ШИМ-управления можно достичь хорошей точности, гибкости и снизить потери мощности. Однако это происходит за счет дополнительного компонента и, возможно, модификации механической конструкции, если вы планируете использовать его в существующем продукте.
Для щеточных двигателей постоянного тока можно измерять и регулировать скорость без каких-либо датчиков на двигателе, используя основную характеристику – напряжение обратной ЭДС, зависящее от скорости.
Бессенсорное аналоговое измерение скорости двигателя
Двигатель постоянного тока моделируется как последовательное соединение внутреннего сопротивления и источника напряжения обратной ЭДС. Напряжение на клеммах двигателя складывается из обратной ЭДС и падения напряжения, превышающего сопротивление катушки.
Связаться
Поговорите с членом нашей команды.
Каталог двигателей
Ищете нашу продукцию?
Надежные и экономичные миниатюрные механизмы и двигатели, отвечающие вашим требованиям.
Эквивалентная схема электродвигателя постоянного тока с щеткойПадение напряжения на внутреннем сопротивлении якоря зависит от тока двигателя (и, следовательно, от момента нагрузки). Невозможно измерить скорость напрямую, измеряя только напряжение на клеммах двигателя.
Сопротивление обмотки Ra обычно постоянно – хотя оно имеет небольшую температурную зависимость, мы можем компенсировать его, чтобы падение напряжения на якоре двигателя было пропорционально току двигателя.
Поскольку невозможно измерить обратную ЭДС напрямую, нам необходимо рассчитать ее по следующему уравнению: 𝑉𝑚𝑜𝑡𝑜𝑟 = 𝑉𝑏𝑒𝑚𝑓 + (𝐼𝑎 × 𝑅𝑎)
К сожалению, напрямую измерить напряжение якоря также невозможно – однако мы можем подключить дополнительный (внешний) резистор последовательно с двигателем. Измерение падения напряжения на этом последовательном резисторе позволяет нам определить обратную ЭДС.
Эквивалентная схема щеточного двигателя постоянного тока с последовательным резисторомЕсли мы установим значение последовательного резистора равным сопротивлению в двигателе, мы гарантируем, что любое изменение падения напряжения на последовательном резисторе будет равно падению напряжения в якоре: 𝑉𝑎 = 𝐼𝑎 × 𝑅𝑎𝑉𝑠 = 𝐼𝑎 × 𝑅𝑠𝑅𝑠 = 𝑅𝑎𝑉𝑠 = 𝑉𝑎
Итак, сначала нам нужно узнать или измерить сопротивление якоря двигателя.Это можно сделать путем измерения сопротивления на клеммах двигателя с помощью омметра или путем измерения тока остановки с известным напряжением питания. При использовании последнего предпочтительнее использовать низкое напряжение питания, чтобы избежать повреждения из-за перегрузки по току.
Например, при питании двигателя 1,2 В и измерении 100 мА во время остановки сопротивление якоря рассчитывается как: = 𝐼𝑠𝑡𝑎𝑙𝑙 × 𝑅𝑎𝑅𝑎 = 𝑉𝑠𝑢𝑝𝑝𝑙𝑦𝐼𝑠𝑡𝑎𝑙𝑙𝑅𝑎 = 1,2𝑉100𝑚𝐴𝑅𝑎 = 12 Ом
При использовании омметра для измерения оконечного сопротивления снимите среднее значение нескольких показаний при различных положениях ротора.
Напряжение питания будет равно напряжению последовательного резистора, напряжению сопротивления якоря и напряжению обратной ЭДС. = 𝑉𝑠 + 𝑉𝑎 + 𝑉𝑏𝑒𝑚𝑓
Напряжение обратной ЭДС можно рассчитать, вычтя удвоенное падение напряжения на последовательном резисторе из напряжения питания. = 𝑉𝑠𝑢𝑝𝑝𝑙𝑦– (2 × 𝑉𝑠)
Чтобы уменьшить потери мощности, мы можем использовать более низкое значение последовательного сопротивления, но резистор в конечном итоге снизит напряжение, воспринимаемое двигателем. Используя мостовую схему, мы можем сохранить высокую чувствительность измерения и компенсировать потери мощности в двигателе:
Мостовая схема для измерения напряжения обратной ЭДСПравая опора моста состоит из последовательно включенного двигателя M и резистора Rs .Левая ножка – последовательное соединение резисторов R1 и R2 , каждая ножка подключена к источнику питания. Напряжение обратной ЭДС измеряется между точками A и B .
Rload представляет входное сопротивление нашей измерительной цепи. Поскольку он будет состоять из операционного усилителя, его входное сопротивление будет намного больше, чем другие сопротивления в этой схеме (идеальные операционные усилители имеют бесконечное входное сопротивление).
Нам необходимо убедиться, что напряжение между точками A, и B не зависит от тока двигателя и напряжения питания и зависит только от скорости двигателя и входного сопротивления измерительной цепи ( Rload ).
Начнем с анализа цепи без обратной ЭДС, т.е. когда двигатель остановлен. Для балансировки моста напряжение между точками A, и B должно быть равно нулю. Это происходит до тех пор, пока соотношение между R1 и R2 такое же, как Rs и Ra : 𝑅2𝑅1 = 𝑅𝑎𝑅𝑠
.ч – коэффициент усиления нашего моста: ℎ = 𝑅1𝑅2 = 𝑅𝑠𝑅𝑎
Если мы выведем двигатель из состояния остановки, напряжение обратной ЭДС пропорционально скорости: 𝑉𝑏𝑒𝑚𝑓 = 𝑘𝑒 × 𝑛
, где ke – электрическая постоянная для нашего двигателя, а n – скорость двигателя.
Если двигателю разрешено вращаться со скоростью холостого хода, для идеального двигателя мы ожидаем, что Ia равно 0. Это потому, что идеальные двигатели игнорируют сопротивление воздуха и трение подшипников. Напряжение на скорости холостого хода: = 𝑘𝑒 × 𝑛𝑁𝐿
Отсюда Vbemf можно подписать как: 𝑉𝑏𝑒𝑚𝑓 = 𝑉𝑟𝑝𝑚𝑁𝐿 × 𝑛𝑛𝑁𝐿 = 𝑉𝑟𝑝𝑚𝑁𝐿 × 𝐾
Где K – коэффициент пропорциональности между Vbemf и V_rpm в нашей схеме.
Теперь мы можем составить систему уравнений для нашей схемы:
Текущие уравненияРешение для I5 : 𝐼5 = ℎ (ℎ + 1) 𝑉𝑟𝑝𝑚𝑁𝐿 × 𝐾2ℎ (𝑅𝑎 + 𝑅2) + (ℎ + 1) 2 × 𝑅𝑙𝑜𝑎𝑑
Таким образом, выходное напряжение равно: 𝑉𝑟𝑝𝑚 = 𝐼5 × 𝑅𝑙𝑜𝑎𝑑 = ℎ (ℎ + 1) × 𝑉𝑟𝑝𝑚𝑁𝐿 × 𝐾2ℎ (𝑅𝑎 + 𝑅2) + (ℎ + 1) 2 × 𝑅𝑙𝑜𝑎𝑑 × 𝑅𝑙𝑜𝑎𝑑
А для работы без нагрузки: 𝑉𝑟𝑝𝑚 = ℎℎ + 1 × 𝑉𝑟𝑝𝑚𝑁𝐿 × 𝐾
Выходное напряжение между точками A, и B не зависит от источника питания и тока двигателя как без нагрузки, так и при работе под нагрузкой.Он зависит от х , и при увеличении выходное напряжение также увеличивается.
Как упоминалось ранее, сопротивление якоря будет изменяться в зависимости от температуры – дисбаланс моста и влияние на выход В об / мин . Чтобы свести к минимуму этот эффект, мост следует настраивать, когда двигатель находится при рабочей температуре.
Этот метод стабилизации скорости был популярным решением для контроллеров скорости вращения ротора регулятора, используемых в магнитофонах, использующих аналоговую электронику.В эпоху магнитофонов многие компании производили микросхемы для управления двигателем постоянного тока, чтобы лента двигалась с постоянной скоростью. Это было интересное решение, потому что оно работало линейно и не создавало шума, как контроллеры на основе ШИМ.
Общие микросхемы включают LA5586, TDA7274, BA6220 и AN6550. К сожалению, производство большинства из них было снято с производства, и теперь их можно приобрести только на вторичном рынке. Схемы в микросхемах немного отличались, но принцип работы по-прежнему основан на мостовой схеме, описанной выше.
LA5586 Эквивалентная схема регулятора скорости двигателя и прикладная схемаОбратите внимание, что эквивалентная схема нарисована с источниками тока и постоянным коэффициентом тока. Коэффициент текущей ликвидности составляет от 20 до 40, в зависимости от конкретной ИС, и обозначен как K . В интегральных схемах легко сделать два источника тока с одинаковыми температурными параметрами.
Двигатель подключен к одной ветви моста, а вторая ветвь содержит резистор со значением K, в раз превышающим внутреннее сопротивление двигателя.
Цепь установившегося состояния для контроллера двигателяВ установившемся режиме ток двигателя в K в раз больше, чем ток через Rt . Отрицательный вход операционного усилителя подключен к источнику напряжения, поэтому падение напряжения на резисторе Rt всегда будет ниже, чем напряжение двигателя. Разница составит Vref . Напряжение в точке A (относительно земли) всегда будет выше, чем напряжение в точке B .
Без Rs , ток через Rt в 40 раз меньше тока двигателя. Когда нагрузка двигателя увеличивается, напряжение в точке B увеличивается, а также увеличивается выходное напряжение усилителя. Более высокое напряжение усилителя вызывает более высокий ток двигателя, что увеличивает крутящий момент двигателя. Регулировка скорости может быть достигнута путем добавления шунтирующего резистора – напряжение между точками A, и B всегда равно опорному напряжению, поэтому легко контролировать дополнительный ток, добавленный к Rt .
Эта схема будет сбалансирована, когда напряжение двигателя равно сумме напряжений на Rt и Rs ( Vref ). Уравнение установившегося состояния: × 𝑅𝑚 + 𝑉𝑏𝑒𝑚𝑓 = 𝑅𝑇 × 𝐼𝑠 + 𝑅𝑇 × 𝐼𝑠 + 𝐼𝑚𝐾 + 𝑉𝑟𝑒𝑓
Отсюда уравнение для обратной ЭДС: 𝑉𝑏𝑒𝑚𝑓 = 𝑉𝑟𝑒𝑓 + (1 + 1𝐾) × 𝑅𝑇 × 𝐼𝑠 + 𝑅𝑇𝐾 – 𝑅𝑚 × 𝐼𝑚
Принятие: 𝐾 × 𝑅𝑚 = 𝑅𝑇
, то количество оборотов, определяемое Vbemf , составляет: 𝑉𝑏𝑒𝑚𝑓 = 𝑉𝑟𝑒𝑓 + 𝑅𝑇 × (1 + 1𝐾) × 𝐼𝑠
Важно, чтобы во всех случаях значение Rt было меньше K x Rm , в противном случае цепь будет чрезмерно компенсированной и нестабильной.
Аналоговый регулятор скорости с отрицательным сопротивлением
Увеличение нагрузки на двигатель приводит к увеличению потребляемого тока и падению скорости. Также уменьшается обратная ЭДС и напряжение на двигателе, этот метод управления известен как регулятор отрицательного вывода.
В этом случае мы используем операционный усилитель для управления скоростью, поэтому наша R_load будет на тысячи больше, чем другое сопротивление в этой цепи, и снова может быть опущена.
Из предыдущего раздела мы знаем, что напряжение источника питания не изменилось на В об / мин , что позволяет нам запитать нашу схему от мощного операционного усилителя или добавить транзистор к выходу стандартного операционного усилителя. .Подключив инвертирующий вход к ножке моста между двигателем и последовательным резистором, мы можем управлять источником питания моста с помощью напряжения, подключенного к неинвертирующему выходу.
Цепь управления напряжением двигателяВходное напряжение подается на неинвертирующий вход операционного усилителя, а инвертирующий вход подключается непосредственно к клемме двигателя. Мы пока не можем контролировать скорость с помощью схемы, в связи с чем наш усилитель работает как буфер (или повторитель напряжения) с коэффициентом усиления равным 1.По сути, входное напряжение определяет напряжение двигателя.
Можно изменить скорость двигателя, установив напряжение Vin, но это не поддерживает постоянную скорость при изменении нагрузки. При постоянном входном напряжении двигатель будет вращаться быстрее при малых нагрузках и медленнее при увеличении нагрузки. Нам нужно еще несколько компонентов для стабилизации скорости двигателя.
Падение напряжения на Rs пропорционально падению напряжения на сопротивлении якоря двигателя, мы будем использовать это напряжение для компенсации падения напряжения на сопротивлении якоря.Это можно сделать, добавив модификацию схемы к приведенной ниже – добавив R1 и R2 и подключив их среднюю точку к неинвертирующему входу операционного усилителя.
Цепь регулятора скорости двигателяСоотношение R1 и R2 должно быть таким же, как Rs и Ra для обеспечения стабилизации скорости. На изображении выше показана полная схема и ее эквивалент для руководства, управляющее напряжение должно быть таким же, как напряжение обратной ЭДС при желаемой скорости.
Коэффициент компенсации определяется значением Rs , но удобнее использовать стандартное значение сопротивления, а затем изменить R1 или R2 соответственно.
Если скорость двигателя уменьшается при приложении нагрузки, следует увеличить значение R2 (или уменьшить R1 ). Если скорость двигателя начинает колебаться (или имеет тенденцию к увеличению) при приложении нагрузки, следует уменьшить R2 или ( R1 следует увеличить).
Чтобы спроектировать эту схему, нам нужно знать, какое значение обратной ЭДС на желаемой скорости:
- Чтобы найти напряжение обратной ЭДС на желаемой скорости, вал двигателя может быть установлен на бурильщик и приведен в движение. После достижения желаемой скорости (проверенной тахометром) измерьте напряжение на клеммах двигателя с помощью высокоомного вольтметра.
- Измерьте внутреннее сопротивление обмотки с помощью омметра на клеммах двигателя. Хорошо взять среднее значение из нескольких различных измерений положения ротора.
- Выберите значение Rs из стандартных значений, оно может быть меньше сопротивления двигателя.
- Выберите R1 и R2 , чтобы соотношение было таким же, как соотношение между Rs и Ra . Фактические значения резистора должны быть больше Rs и Ra для экономии тока. Поскольку эквивалентное сопротивление плеч моста будет другим, операционный усилитель должен быть с низким входным током.
- Подайте управляющее напряжение, равное желаемой обратной ЭДС.
- Проверьте скорость и соответствующим образом компенсируйте (указано в абзаце перед этим списком).
Для температурной компенсации можно выбрать Rs с тем же температурным коэффициентом, что и обмотки двигателя – для меди это 3400 частей на миллион. Этот резистор следует размещать как можно ближе к двигателю, чтобы поддерживать тот же температурный режим.
Простая схема стабилизации скорости двигателя также может быть выполнена только на транзисторах:
Транзисторный регулятор скоростиВ этой схеме T2 работает как выходной каскад, а T1 как усилитель ошибки.Сигнал на коллекторе T1 является выходным сигналом, эмиттер работает как инвертирующий вход, а база как неинвертирующий вход.
Сигнал напряжения на двигателе подключен к неинвертирующему входу, потому что выходной каскад инвертирует этот сигнал, что означает, что больший сигнал на коллекторе вызывает меньший ток двигателя.
Диоды D1 и D2 создают опорное напряжение, напряжение на эмиттере T1 всегда ниже, чем напряжение на выводах двигателя.Напряжение компенсации берется из R3 и вычитается из напряжения питания моста, которое измеряется делителем напряжения R4 , R5 и R1 .
R7 и C2 – это схема запуска, помогающая преодолеть статическое трение, а C1 – конденсатор компенсации частоты, предотвращающий высокочастотные колебания.
Поскольку нам необходимо точное измерение обратной ЭДС, которое зависит от контактного сопротивления между коммутатором и щетками, лучше всего использовать двигатели с металлическими щетками.Большинство двигателей Precision Microdrive имеют металлические щетки и подходят для этого метода управления скоростью.
Регулятор скорости со специализированным IC
Эта схема основана на AN6651, специализированном контроллере двигателя, который ранее был популярен в магнитофонах.
AN6651 работает по тому же принципу, что и описанный выше LA5586. Контакты 2 и 4 являются выходами источника тока, соотношение между управляющим выходом (контакт 2) и выходом двигателя (контакт 4) составляет 40: 1.
Сопротивление R1 , подключенное между контактом 2 и источником питания, должно быть в 40 раз больше внутреннего сопротивления двигателя для того же падения напряжения на R1 , что и на внутреннем сопротивлении двигателя: 𝐾 = 40𝑅1 = 𝐾 × 𝑅𝑚
AN6651 работает по тому же принципу, что и описанный выше LA5586.Контакты 2 и 4 являются выходами источника тока, соотношение между управляющим выходом (контакт 2) и выходом двигателя (контакт 4) составляет 40: 1.
Сопротивление R1 , подключенное между контактом 2 и источником питания, должно быть в 40 раз больше внутреннего сопротивления двигателя для того же падения напряжения на R1 , что и на внутреннем сопротивлении двигателя: 𝐾 = 40𝑅1 = 𝐾 × 𝑅𝑚
Например, используя стандартное значение 390 Ом для R1 (меньшее значение снижает склонность к возникновению колебаний), нам нужно найти значения для последовательного соединения R2 и R3.Давайте возьмем двигатель постоянного тока 132-100 и установим целевую скорость 2400 об / мин. Для начала нам нужны некоторые технические детали:
- Сопротивление двигателя, = 10 Ом
- Входное напряжение без нагрузки при скорости 2400 об / мин, 𝑉𝑚 = 3,87𝑉
- Ток без нагрузки при скорости 2400 об / мин, 𝐼𝑚 = 23𝑚𝐴
Мы можем рассчитать падение напряжения на внутреннее сопротивление как: 23𝑚𝐴 × 10Ω = 0,23𝑉
, и мы также можем рассчитать Vbemf как: 3,87𝑉 − 0,23𝑉 = 3,65𝑉
В установившемся режиме, когда цепь сбалансирована, уравнение цепи имеет следующий вид: 𝐼𝑚 × 𝑅𝑚 + 𝑉𝑏𝑒𝑚𝑓 = 𝑅1 × (𝐼𝑅2𝑅3 + 𝐼𝑅2𝑅3 + 𝐼𝑚𝐾 + 𝑉𝑟𝑒𝑓
Из этого уравнения мы можем вычислить обратную ЭДС: 𝑉𝑏𝑒𝑚𝑓 = 𝑉𝑟𝑒𝑓 + 𝑅1 × (1 + 140) × 2𝑅3
Как мы знаем из даташита Vref = 1V, поэтому: 𝐼𝑅2𝑅3 = 𝑉𝑏𝑒𝑚𝑓 – 𝑉𝑟𝑒𝑓𝑅1 × (1 + 140)
Для нашего мотора имеем: 𝐼𝑅2𝑅3 = 3.64–1390 × (1 + 140) 𝐼𝑅2𝑅3 = 0,0051𝐴 = 5,1𝑚𝐴
С помощью этого значения мы можем рассчитать последовательное сопротивление R2 и R3 : 𝐼𝑅2𝑅3 = 𝑉𝑟𝑒𝑓𝑅2 + 𝑅3𝑅2 + 𝑅3 = 𝑉𝑟𝑒𝑓𝐼𝑅2𝑅3𝑅2 + 𝑅3 = 195 Ом
Мы можем использовать постоянный стандартный резистор 150 Ом плюс потенциометр 100 Ом, что дает нам диапазон для точной настройки. Расчетные значения являются приблизительными, в реальной цепи ток внутреннего источника опорного напряжения также является значительным (между 0,8 – 2 мА для AN6651), это приведет к изменению тока двигателя.
Добавление потенциометра позволяет установке регулировать скорость, и ее следует откалибровать через некоторое время, чтобы двигатель прогрелся до рабочей температуры, чтобы минимизировать результирующий сдвиг сопротивления.
132-100 и AN6651 Цепь регулятора скоростиПрецизионные микроприводы 132-100 PCB с AN6651
Прецизионные микроприводы 132-100 PCB с AN6651
Регулятор скорости с дискретным операционным усилителем
Это улучшенная версия схемы операционного усилителя, описанной выше, с использованием специальной ИС.Основное улучшение – это работа при низком напряжении, благодаря использованию опорного сигнала с малой шириной запрещенной зоны. Использование этого дискретного компонента минимизирует размер схемы, что идеально подходит для современных небольших корпусов.
В этой схеме компенсационное напряжение снимается с последовательного резистора R8 , значение которого меньше внутреннего сопротивления двигателя для уменьшения потерь мощности. Вторая опора моста образована из R6 и R7 . Соотношение этих резисторов должно быть таким же, как R8 и сопротивление обмотки двигателя.В качестве типичного значения можно выбрать R8 , тогда для компенсации внутреннего падения напряжения следует выбрать R6 и R7 . Для стабильной работы коэффициент R7 / R6 должен быть больше Rm / R8 .
Эта схема должна подходить для небольших двигателей с номинальным напряжением 1 В ~ 2 В.
Цепь на основе ОУ для стабилизации скорости двигателяРегулятор скорости на транзисторах
Эта недорогая схема построена на транзисторах для управления скоростью двигателя, хотя она не обеспечивает такой же точности, как операционный усилитель, ее можно сделать очень маленькой и полезной для недорогих приложений.
В этой схеме опорное напряжение составляет 1,2 В, и D1 работает как опорное напряжение. Обратная ЭДС двигателя больше опорного напряжения – в зависимости от делителя напряжения R2 , R3 и R4 :
- Во-первых, нам нужно установить коэффициент делителя напряжения, наше опорное напряжение составляет 1,2 В, а когда желаемая обратная ЭДС составляет 3,6 В, делитель напряжения R2 , R3 и R4 должен иметь коэффициент: 3.61,2 = 3
- Итак, у нас есть максимальный диапазон для точной настройки схемы, это нужно делать, когда потенциометр ( R3 ) находится в среднем положении. Теперь нам нужно разделить оставшееся значение между каждым из других резисторов.
- Когда мы знаем наш коэффициент делителя напряжения, выбрать R6 и R8 легко. У нас должно быть одинаковое соотношение между делителем напряжения R6 , R8 и внутренним сопротивлением двигателя.
Этот контур разработан для одной постоянной скорости, и изменение скорости с помощью триммера влияет на компенсацию скорости.Таким образом, триммер следует использовать только для настройки этой схемы в диапазонах очень низких скоростей. Чтобы использовать эту схему с широким диапазоном настройки скорости, нам необходимо внести некоторые изменения:
Двухтранзисторный регулятор скорости двигателяТрехтранзисторный регулятор скорости двигателя
Эта схема работает по тем же правилам, что и предыдущая версия с двумя транзисторами, но основным улучшением является увеличение коэффициента усиления для опорного напряжения транзистором Q2 . Это позволяет нам использовать опорное напряжение с микромощной запрещенной зоной, которое более стабильно, чем стандартные диоды.Еще одно улучшение от добавления Q2 – это температурная компенсация Vbe между транзисторами Q1 и Q2 .
Расчет этой схемы начинается с задания напряжения обратной ЭДС. В этой схеме опорное напряжение равно LM385 – 2,5 В и напряжение Vbe для Q2 : 𝑉𝑟𝑒𝑓 = 𝑉𝑏𝑔𝑟𝑒𝑓 + 𝑉𝑏𝑒 = 1,2𝑉 + 0,7𝑉 = 1,9𝑉
.Если нам нужно, чтобы Vbemf составляло 3,8 В, коэффициент делителя напряжения R2 , R4 и R3 должен быть 2: 1.Потенциометр ( R3 ) предназначен для точной настройки этого напряжения, но в этой схеме изменение скорости с помощью триммера вызовет изменение компенсации. Таким образом, R3 предназначен только для окончательной настройки скорости в небольшом диапазоне, скажем, 5% или меньше, и должен использоваться только для компенсации допуска других значений компонентов.
После установки этого делителя напряжения выбрать значение R6 и R7 легко, когда мы знаем внутреннее сопротивление двигателя. Эквивалентное параллельное соединение R6 , R7 и сопротивление двигателя должны иметь такое же соотношение, что и делитель напряжения R2 , R3 и R4 (с потенциометром R3 , установленным в среднее положение).
Прецизионные микроприводы Трехтранзисторный контроллер скорости двигателяПрецизионные микроприводы Трехтранзисторный контроллер скорости двигателя
Аналоговый регулятор скорости переключения режимов
В этой статье описывается простая реализация аналогового регулятора скорости двигателя, основанная на измерении обратной ЭДС и управляющем сигнале ШИМ.
При использовании ШИМ с двигателем постоянного тока все еще можно управлять скоростью двигателя без каких-либо датчиков. Используя типичный недорогой драйвер с одним полевым МОП-транзистором, можно измерить обратную ЭДС, когда двигатель вращается, а транзистор выключен.
Управление частотой вращения двигателя с использованием обратной ЭДС в режиме переключения аналоговой схемыЭтот контроллер состоит из модулятора ШИМ, выходного транзистора и схемы «выборки и удержания» (иногда известной как схемы «слежения и удержания»). Модулятор PWM имеет управляющий вход, который позволяет изменять рабочий цикл. Если вы не знакомы, это может показаться сложным, но общая идея довольно проста:
- , когда транзистор включен, напряжение питания подключено к клеммам двигателя, ток двигателя Im протекает через двигатель, заставляя его ускоряться.
- , когда транзистор выключен, двигатель действует как генератор, а Vm равно до Vbemf , который пропорционален скорости двигателя.Срабатывает схема выборки и удержания, которая сохраняет выборку Vbemf в конденсаторе
Узел суммирования затем вычисляет разницу между желаемой скоростью и текущей скоростью, поскольку обе представлены напряжением (желаемое напряжение и Vbemf соответственно). Это напряжение ошибки используется для управления скоростью двигателя путем увеличения или уменьшения рабочего цикла модулятора ШИМ.
Из-за индуктивного характера двигателей постоянного тока измерение обратной ЭДС невозможно сразу после выключения транзистора.Когда транзистор переключается, генерируется сильный индуктивный всплеск, и индуктивный рециркуляционный ток Ir течет через реверсивный диод. Необходима небольшая задержка, пока напряжение обратной ЭДС не станет стабильным:
Измерение сигнала ШИМ на клеммах двигателяЭтот метод управления может быть выполнен с использованием только аналоговых компонентов или с помощью цифрового микроконтроллера. Практическая реализация контроллера, основанного на этом методе и использующего двигатель постоянного тока 132-100, показана ниже:
Контроллер скорости двигателя на основе измерения обратной ЭДС и выхода ШИМВ этой схеме напряжение на R2 представляет желаемую скорость, IC1A работает как усилитель ошибки и ПИД-регулятор.
Схема ШИМ-модулятора построена на IC1B и IC2 , где IC1B работает как генератор треугольных волн с частотой, определяемой R12 и C4 .
IC2 действует как компаратор, который сравнивает напряжение треугольного сигнала с выхода IC2 с установочным напряжением от потенциометра R15 . Когда напряжение сигнала треугольника ниже, чем напряжение от R15 , выход компаратора высокий, и двигатель запитан.
Схема выборки и удержания состоит из C3 , R10 , D2 , Q1 , R13 . Когда двигатель запитан от T1 , Q2 включен, а узел R13 и D2 закорочен на землю, что не позволяет ему сделать выборку, когда на двигатель подается напряжение Vcc. Диод D2 предотвращает разряд C3 при включенном Q1 .
Когда T1 выключен, Q2 также выключен, и Vbemf может заряжать конденсатор C3 .Напряжение на C3 находится на неинвертирующем входе усилителя ошибки, IC1A . Этот усилитель вычитает текущее напряжение скорости из желаемого напряжения скорости (устанавливается потенциометром R2 ). Когда обратная ЭДС увеличивается, выходное напряжение на IC1A также увеличивается – это смещает уровень сигнала треугольника вверх пропорционально ошибке скорости. Если уровень сигнала треугольника увеличивается, то время, когда выходной транзистор включен, уменьшается, и коэффициент заполнения ШИМ также уменьшается.
Этот усилитель ошибки работает как схема ПИД-регулирования, где коэффициент усиления определяется как 5𝑅5 + 10, а постоянная времени определяется как R5 и C2 .
Схема выборки и хранения очень проста, потому что время выборки равно состоянию выключения в рабочем цикле ШИМ, поэтому напряжение выборки напрямую зависит от рабочего цикла. Кроме того, это менее важно, если схема используется для управления приложением, которое не использует полный диапазон скорости двигателя.Его также можно уменьшить по выбору, изменив значения R10 , C3 и R13 , которые позволяют изменять время заряда / разряда C3 .
Диапазон изменения рабочего цикла ШИМ (от приложенного напряжения ошибки) определяется соотношением R7 до R8 || R9 , однако, поскольку схема Sample & Hold настолько проста, этот диапазон не должен быть очень широким.
Эта схема предназначена для работы в малом диапазоне ШИМ, максимальная нагрузка ШИМ снижается за счет задержки индуктивной нагрузки двигателя, и с ограничением схемы выборки и удержания этот метод не следует использовать для широкого диапазона. диапазон регулирования скорости.
Это демонстрирует принцип работы, поэтому для практического использования настоятельно рекомендуется улучшить простую схему выборки и хранения. Например, схема на основе недорогого LF398 может обеспечить время выборки 10 мкс.
По сравнению с аналоговой схемой отрицательной обратной связи этот метод:
- снижает потери мощности
- может быть более стабильным, так как температура не влияет на напряжение обратной ЭДС (за счет изменения сопротивления обмотки)
Однако это также:
- не подходит для двигателей с высокой индуктивностью
- имеет узкий диапазон регулирования скорости
- имеет тенденцию к колебаниям
Информационный бюллетень
Подпишитесь, чтобы получать новые блоги, тематические исследования и ресурсы – прямо на ваш почтовый ящик.
Узнать больше
Ресурсы и руководства
Ознакомьтесь с замечаниями по применению наших продуктов, руководствами по дизайну, новостями и тематическими исследованиями.
Примеры из практики
Изучите нашу коллекцию тематических исследований, примеры нашей продукции в различных областях применения.
Прецизионные микроприводы
Нужен ли вам компонент двигателя или полностью проверенный и протестированный сложный механизм – мы всегда готовы помочь. Узнайте больше о нашей компании.
Подано в: С тегами:7 фактов о контроллере двигателя постоянного тока
Что такое контроллер двигателя постоянного тока?
Контроллер двигателя постоянного тока (постоянный ток) – это особый тип электрического устройства, которое преобразует электрическую энергию в механическую. Двигатели постоянного тока получают электроэнергию, используя постоянный ток, а затем преобразуют эту энергию в автоматическое вращение.
Двигатели постоянного тока есть почти везде.Они используют магнитное поле, создаваемое генерируемым током. Эти токи являются токами, которые приводят в движение ротор, закрепленный на выходном валу. Скорость и выходной крутящий момент зависят как от конструкции двигателя, так и от входной мощности.
Как работает контроллер двигателя постоянного тока?
Двигатели постоянного токаразличаются по мощности и размеру. Вы можете найти важные механизмы, используемые для подъема и подъемников, механических транспортных средств, и маленькие механизмы, найденные в игрушках. Но опять же, как работает двигатель постоянного тока? Двигатели постоянного тока состоят из двух основных частей: якоря и статора.Статор – это постоянная часть двигателя, а якорь – это вращающаяся часть.
В двигателепостоянного тока в дополнение к катушке с проволокой используются стационарные наборы магнитов в статоре. В петле из проволоки протекает ток, который создает выровненное электромагнитное поле. Одна или несколько обмоток изолированного провода наматываются вокруг сердечника двигателя с целью концентрации магнитного поля.
Обмотки изолированного провода подключаются к поворотному электрическому переключателю (коммутатору), который подает электрический ток на обмотки катушки.Вращающийся электрический переключатель позволяет каждой катушке якоря получить питание, создавая крутящий момент или постоянное вращающее усилие.
При последовательном включении и выключении катушек создается магнитное поле, которое взаимодействует с различными участками неподвижных магнитов, создавая крутящий момент. Эти фундаментальные принципы работы позволяют двигателям постоянного тока преобразовывать электрическую энергию постоянного тока в механическую, которую можно использовать для силового оборудования. Все это за счет вращательного движения.
Кто изобрел контроллер двигателя постоянного тока?
Двигатель постоянного тока – это выдающееся электрическое устройство, которое произвело революцию в жизни людей во многих отношениях. Но кто был изобретателем двигателя постоянного тока? Как и во всех остальных нововведениях, есть множество людей, которые сыграли свою роль в разработке другого оборудования.
В США Томас Давенпорт был изобретателем первого электродвигателя. Давенпорт был первым человеком, который пошел дальше и подал заявку на патент на пригодный для использования электродвигатель.Это было еще в 1837 году. Однако Давенпорт не был первым человеком, который построил электродвигатель, поскольку другие изобретатели в Европе разработали более мощную версию ранее.
Причина, по которой он хвалил Давенпорта как первого изобретателя, заключается в том, что он ранее подал заявку на патент. В 1834 году Якоби Мориц уже представил очень мощный двигатель (в три раза более мощный), чем у Давенпорта. Год спустя Сибрандус Стратинг и Кристофер Беккер продемонстрировали практическое применение электродвигателя.
Типы контроллеров двигателей постоянного тока и управления двигателями постоянного тока
Стоит знать несколько типов двигателей постоянного тока. До сих пор в этом руководстве подробно объяснялось, что такое двигатели постоянного тока, их функции и история. На этом этапе мы рассмотрим типы двигателей постоянного тока. Короче говоря, существует четыре основных типа двигателей постоянного тока, как показано ниже:
Бесщеточные двигатели постоянного тока
Они также известны как синхронные двигатели постоянного тока или двигатели с электронной коммутацией.Основное отличие этих типов двигателей от остальных в том, что в них отсутствует коммутатор. Однако он заменен сервомеханизмом, который может определять и впоследствии регулировать угол поворота ротора. Бесщеточные двигатели постоянного тока долговечны и безопасны.
Двигатели постоянного тока с щетками
Это оригинальные двигатели постоянного тока, разработанные компанией Sprague. Хотя они остаются популярными для бумагоделательных машин, кранов и прокатных станов, в последнее время их популярность уменьшается.
Параллельные двигатели постоянного тока
Это тип щеточных двигателей с подключением обмоток возбуждения параллельно якорю.У них меньший ток за счет параллельности обмоток. Шунтовые двигатели находят широкое применение в нескольких приложениях, где требуется постоянный крутящий момент. Больше всего от них полагаются смесители, конвейерные ленты и подъемники.
Двигатели постоянного тока серииЭто последняя разновидность. Последовательное соединение обмоток возбуждения отличает их от параллельных двигателей. Следовательно, это означает, что ток якоря действительно проходит через обмотку возбуждения, создавая гораздо более высокие скорости. Серийные двигатели постоянного тока идеально подходят для задач, требующих высокого пускового момента.
Наиболее распространенные методы управления двигателем постоянного тока:
Регулятор направления: H-мост
H мостовая схема является одним из простейших способов управления двигателем постоянного тока. Здесь вы найдете четыре переключателя, управляемых попарно. Когда любая из этих пар замыкается, они немедленно замыкают цепь и впоследствии приводят в действие двигатель. H-мост также может контролировать скорость.
Регулятор скорости: широтно-импульсная модуляция (ШИМ)
ЦепиPWM изменяют скорость двигателя, моделируя увеличение или уменьшение подачи напряжения.ШИМ легко и недорого применять, аспект, который позволяет непрерывно контролировать скорость двигателя. Здесь вы найдете контроллеры привода с регулируемой скоростью, которые работают, посылая на двигатель периодические импульсы. Когда индуктивность катушки с использованием обычного импульса дает некоторый эффект сглаживания привязки, электродвигатель работает как от высокого или низкого напряжения.
Контроллер якоря: переменное сопротивление
Это еще один способ воздействия на скорость двигателя постоянного тока. Здесь изменяется ток, подаваемый через якорь или катушку возбуждения.Если вам интересно, вы заметите, что скорость выходного вала изменяется при изменении тока катушек. Переменные резисторы могут изменять ток, чтобы вы могли увеличить скорость.
Что нужно знать при покупке двигателей постоянного тока
Купить двигатели постоянного тока очень просто. Все, что вам нужно сделать, это найти своего поставщика, заключить сделку, заплатить за нее и забрать товар, верно? Если вы так думаете, то ошибаетесь. Перед покупкой двигателей постоянного тока необходимо учесть несколько важных моментов.Вот несколько важных факторов, которые следует учитывать:
НапряжениеЧем выше энергия, тем выше крутящий момент. Энергия поддерживает чистый ток в одном направлении. Обязательно проверьте рекомендованное натяжение двигателя постоянного тока в инструкции по эксплуатации. Если таковой не хватает, отправляйтесь в другое место.
Текущий
Ток питает двигатель, и слишком большая его часть опасна, так как может повредить двигатель. Перед покупкой убедитесь, что вы знаете рабочий ток и ток остановки вашего контроллера двигателя постоянного тока.
Скорость
Скорость несколько сложна, когда дело касается двигателей. Двигатели эффективно работают на высоких скоростях, но это невозможно при необходимости переключения передач. Добавление передач не ограничивает эффективность двигателя. Следовательно, вам нужно также учитывать снижение крутящего момента и скорости.
Материал печатной платы в них
Тип материала печатной платы, используемого при производстве двигателей постоянного тока, имеет значение. Выбор двигателей постоянного тока, состоящих из печатных плат из некачественных материалов, сопряжен с риском для управления двигателями постоянного тока.
Почему выбирают двигатель постоянного тока?
Хотя у вас есть возможность использовать двигатели переменного тока, настоятельно рекомендуется использовать двигатель постоянного тока в качестве первого выбора. Но почему, спросите вы. Двигатели постоянного тока обладают рядом преимуществ по сравнению с двигателями переменного тока. Например, они отлично подходят, когда вам нужен высокий пусковой крутящий момент, направленный на движение высокоинерционных нагрузок. Кроме того, в отличие от двигателей переменного тока, легко контролировать скорость двигателей постоянного тока.
Двигатели постоянного токатакже идеальны, когда им требуется питание от источников постоянного тока низкого напряжения, таких как солнечные панели или аккумулятор.Если вы хотите быстро изменить направление вращения, вы найдете двигатели постоянного тока, идеально подходящие для ваших приложений. В отличие от двигателей переменного тока, вы можете быстро и легко запускать и останавливать двигатели постоянного тока.
Области применения контроллера двигателя постоянного тока
Поскольку сейчас на рынке представлены различные двигатели постоянного тока, мы широко их используем. Дома двигатели постоянного тока находят применение в игрушках, инструментах и другой бытовой технике. В промышленном секторе их требования включают в себя переходы от поворотных столов к конвейерам и реверсирование, чтобы упомянуть лишь некоторые из них.Ниже приведены лишь некоторые области применения контроллеров двигателей постоянного тока:
Для насосов
Двигатели постоянного токаиспользуются для приведения в действие насосов благодаря их отличной реакции при движении и легкости регулирования скорости.
В вентиляторах
Им отдают предпочтение вентиляторы из-за их энергосберегающего механизма.
Для игрушек
При большом разнообразии напряжений игрушки с двигателем постоянного тока требуют различных типов движения и скорости.
Для электромобилей
Двигатели постоянного тока, предназначенные для электромобилей, предпочтительнее из-за их долговечности и энергоэффективности.
Для электровелосипедов
Электровелосипеды имеют двигатели постоянного тока, расположенные в ступицах заднего и переднего колеса, чтобы обеспечить требуемые уровни мощности и крутящего момента.
Сводка
Без сомнения, не будет конца и конца того, когда прекратится использование контроллеров двигателей постоянного тока. Они продолжают находить применение в нескольких приложениях, несмотря на жесткую конкуренцию со стороны современных и интеллектуальных устройств. На рынке представлены четыре типа двигателей постоянного тока. Все они содержат печатные платы.Без печатных плат контроллеры двигателей постоянного тока не будут работать должным образом. Печатные платы являются сердцем контроллеров двигателей постоянного тока.
Вы ищете лучшие печатные платы для контроллеров двигателей постоянного тока? Не смотрите дальше, чем произведенные WellPCB. У нас есть одни из лучших на рынке печатных плат для контроллеров двигателей постоянного тока. Позвоните нам сегодня, чтобы узнать, как мы можем вам помочь.
Двигатель постоянного тока
Двигатель постоянного токаДалее: Рабочие примеры Up: Магнитная индукция Предыдущая: Двигатель переменного тока В установившемся режиме двигатель переменного тока всегда вращается с частотой смены источника питания.Таким образом, двигатель переменного тока, питаемый от бытовой сети, вращается с частотой 60 Гц в США и Канада, а также 50 Гц в Европе и Азии. Предположим, однако, что Нам нужен электродвигатель с регулируемой скоростью . Мы всегда могли использовать двигатель переменного тока, приводимый в действие источником переменного тока переменной частоты, но такая мощность расходные материалы очень дорогие. Намного дешевле Альтернативой является использование двигателя постоянного тока с питанием от источника постоянного тока. Позволь нам исследуйте двигатели постоянного тока.
Двигатель постоянного тока состоит из тех же основных элементов, что и электрический генератор постоянного тока: и.е. , многооборотная катушка, которая может свободно вращаться в постоянном магнитном поле. Кроме того, вращающаяся катушка подключена к внешней цепи. точно так же, как и в генераторе постоянного тока: , т.е. , через разъемное кольцо коммутатор, который меняет полярность катушки относительно внешняя цепь всякий раз, когда катушка проходит через перпендикулярную плоскость к направлению магнитного поля. Предположим, что внешний источник постоянного напряжения (, например, , аккумулятор или генератор постоянного тока) ЭДС подключается к двигателю.Источник напряжения управляет постоянным током вокруг внешнего цепь, и через мотор. Поскольку ток течет по катушке, магнитное поле оказывает на катушку крутящий момент, который заставляет ее вращаться. Предположим, что двигатель в конце концов достигает установившегося вращения. частота . Вращающаяся катушка генерирует обратную ЭДС, величина прямо пропорциональна частоте вращения [см. (222)].
На рисунке 44 показана рассматриваемая схема. Мотор смоделирован
как резистор, который представляет внутреннее сопротивление
мотор, включенный последовательно с противо-ЭДС. Конечно, обратная ЭДС
действует в направлении, противоположном внешней ЭДС. Применение Ома
закон вокруг цепи дает
| (228) |
который дает
| (229) |
Скорость, с которой двигатель выполняет механическую работу, равна
| (230) |
Предположим, что двигатель постоянного тока подвергается небольшой внешней нагрузке, так что только должен выполнять механическую работу с относительно низкой скоростью.В этом случае, мотор будет раскручиваться до тех пор, пока его противо-ЭДС не станет немного меньше чем внешняя ЭДС, так что через двигатель [согласно формуле. (229)], и, следовательно, механический выходная мощность двигателя относительно низка [согласно формуле. (230)]. Если нагрузка на двигатель увеличится, тогда двигатель замедлится, так что его уменьшается противоэдс, увеличивается ток, протекающий через двигатель, и, следовательно, механическая выходная мощность двигателя увеличивается до тех пор, пока он соответствует новой нагрузке.Обратите внимание, что текущий текущий через двигатель постоянного тока обычно ограничивается обратной ЭДС, а не внутреннее сопротивление мотора. Фактически, обычные двигатели постоянного тока спроектированы в предположении, что противо-ЭДС всегда будет ограничивать ток, протекающий через мотор на сравнительно небольшую стоимость. Если мотор заклинивает, так что катушка останавливается вращаясь, и обратная ЭДС падает до нуля, тогда ток, который потоки через двигатель, как правило, настолько велики, что могут сжечь двигатель если позволить течь в течение любого значительного периода времени.По этой причине, мощность электродвигателя всегда следует немедленно отключать, если двигатель заклинивает. Когда двигатель постоянного тока запускается, катушка сначала вращается недостаточно быстро, чтобы генерируют значительную обратную ЭДС. Таким образом, есть небольшой промежуток времени, сразу после включения двигателя, при котором двигатель тянет относительно большой ток от его источника питания. Это объясняет, почему огни в доме иногда временно тускнеет, когда большой двигатель, такой как двигатель кондиционера включен.
Предположим, что двигатель постоянного тока подвергается постоянной, но относительно небольшой нагрузке. Как было сказано выше, мотор будет раскручиваться до тех пор, пока его обратная ЭДС почти не соответствует внешней ЭДС. Если внешняя ЭДС увеличена, то мотор будет расти дальше, пока его обратная ЭДС не будет соответствовать новому внешнему ЭДС. Точно так же, если внешняя ЭДС уменьшается, двигатель замедляется. Видно, что скорость вращения двигателя постоянного тока контролируется ЭДС источника постоянного тока, к которому подключен двигатель.Чем выше ЭДС, тем выше скорость вращения. Таким образом, относительно легко изменить скорость двигателя постоянного тока, в отличие от двигателя. Двигатель переменного тока, который по сути является двигателем с фиксированной скоростью.
Далее: Рабочие примеры Up: Магнитная индукция Предыдущая: Двигатель переменного тока Ричард Фицпатрик 2007-07-14 Двигатель постоянного тока
– MagLab
Электродвигатели превращают электричество в движение за счет использования электромагнитной индукции.
Ниже показан простой двигатель постоянного тока (DC).
Двигатель оснащен постоянным подковообразным магнитом (называемым статором , потому что он закреплен на месте) и вращающейся катушкой с проволокой, называемой якорем (или ротором , потому что он вращается). Якорь, по которому проходит ток, обеспечиваемый батареей , является электромагнитом, потому что провод с током создает магнитное поле; невидимые силовые линии магнитного поля циркулируют по всему проводу якоря.
Ключ к созданию движения – это размещение электромагнита в магнитном поле постоянного магнита (его поле проходит от северного полюса к южному). Якорь испытывает силу, описываемую правилом левой руки. Это взаимодействие магнитных полей и движущихся заряженных частиц (электронов в токе) приводит к крутящему моменту (обозначенному зелеными стрелками), который заставляет якорь вращаться. Используйте кнопку Flip Battery , чтобы увидеть, что происходит, когда ток меняется на противоположное.Воспользуйтесь преимуществами ползунка Applet Speed и кнопки Pause , чтобы лучше визуализировать эти силы.
Один поворот на 180 градусов – это все, что вы получили бы от этого двигателя, если бы не коммутатор с разъемным кольцом – круглое металлическое устройство, разделенное на половины (показано здесь красным и синим цветом), которое соединяет якорь к цепи. Электричество течет от положительного полюса батареи по цепи, проходит через медную щетку к коммутатору, а затем к якорю.Но этот поток меняется на противоположный в середине каждого полного оборота благодаря двум зазорам в коммутаторе. Это хитрый трюк: в первой половине каждого оборота ток течет в якорь через синюю часть коммутатора, заставляя ток течь в определенном направлении (обозначенном черными стрелками). Однако во второй половине вращения электричество проходит через красную половину коммутатора, заставляя ток течь в якорь и через него в противоположном направлении.Это постоянное реверсирование по существу превращает источник питания постоянного тока батареи в переменный ток, позволяя якорю испытывать крутящий момент в нужном направлении в нужное время, чтобы поддерживать его вращение.
Посмотреть анимационный видеоролик о двигателях постоянного тока.
Принципиальная схема двигателя постоянного тока
Параболическая антенна на базе серводвигателя постоянного тока автоматически позиционируется с использованием техники управления для отслеживания спутника путем поддержания желаемой прямой видимости для качественной передачи и приема сигналов электромагнитных волн в телекоммуникационных и радиовещательных приложениях.Несмотря на то, что в литературе предлагается несколько методов управления положением параболической антенны, все еще существует потребность в улучшении ошибки слежения и устойчивости системы управления при наличии помех. В этой статье представлено управление позиционированием антенны на базе серводвигателя постоянного тока с использованием настраиваемого компенсатора (ТК) пропорционально-интегрально-производной (ПИД). Компенсатор был разработан с использованием диспетчера инструментов управления и оценки (CETM) MATLAB на основе метода проектирования настройки PID с использованием надежной техники настройки времени отклика с интерактивным (регулируемая производительность и надежность) режимом проектирования с полосой пропускания 40.3 рад / с. Компенсатор был добавлен в контур управления положением спутниковой антенной системы на базе серводвигателя постоянного тока. Моделирование проводилось в среде MATLAB для четырех отдельных случаев путем применения единичного принудительного ввода для изучения различных ступенчатых реакций. В первом и втором случаях моделирование проводилось без компенсатора (PID TC) в контуре управления, предполагая нулевое входное возмущение и входное возмущение агрегата. Результаты, полученные в отношении параметров отклика во временной области, показали, что с введением единичного возмущения время нарастания улучшилось на 36% (0.525-0,336 с), в то время как время пика, процентное превышение пика и время установления ухудшаются на 16,3% (1,29-1,50 с), 43,5% (34,7-49,8%) и 7,6% (4,35-4,68 с), соответственно. С введением PIDTC для третьего случая произошло улучшение общих параметров переходной характеристики системы. Таким образом, чтобы предоставить дополнительную информацию об улучшенных характеристиках компенсатора, был проведен анализ процентного улучшения. Учитывая, что система с компенсацией допускает нулевые помехи, рабочие характеристики системы во временной области улучшились на 94.1, 94,7, 73,1 и 97,1% с точки зрения времени нарастания (525-30,8 мс), времени пика (1290-67,9 мс), пикового процентного отклонения (34,7-9,35%) и времени установления (4,35-0,124 с), соответственно. В четвертом случае способность компенсатора обеспечивать устойчивую работу при наличии возмущения была исследована путем сравнения рабочих параметров переходной характеристики некомпенсированной системы с единичным входным возмущением с рабочими параметрами переходной характеристики компенсированной системы, помеченными: с ПИД-регулятором TC + единичное возмущение.Результат показывает, что PID TC обеспечивает улучшенную производительность переходного процесса во временной области для обработки возмущений системы на 91,0, 95,4, 80,0 и 93,1% с точки зрения времени нарастания (336-30,5 мс), пикового времени (1500-69,1 мс). ), пиковое процентное превышение (34,7-10,0) и время установления (4,68-0,325 с) соответственно. Разработанный компенсатор обеспечил улучшенные характеристики надежности и отслеживания при соблюдении заданных рабочих параметров во временной области в присутствии помех.
Управление двигателем постоянного тока с помощью H-образного моста
Управление двигателем постоянного тока с помощью H-образного моста
В этом эксперименте мы будем управлять двигателем с помощью расширения PWM.Для этого мы будем использовать микросхему H-Bridge и посылать ей соответствующие управляющие сигналы с помощью расширения PWM, затем H-Bridge позаботится о запуске двигателя. Попутно мы узнаем, как именно работают H-Bridges, и создадим больше классов, которые воспользуются преимуществами уже созданных ранее. Чтобы расширить это, мы подключим три переключателя и запрограммируем Omega на управление скоростью и направлением двигателя в зависимости от их положения.
Если вам нужно напомнить, как работает ШИМ (или широтно-импульсная модуляция), вы можете найти объяснение в первом описании диммирования светодиода.
Как работают двигатели постоянного тока
Самый простой из всех двигателей, двигатели постоянного тока вращаются, когда на них подается постоянное напряжение. Такой двигатель можно найти в дронах, электроинструментах и роботах. Двигатель постоянного тока может изменять скорость и направление в зависимости от того, какая мощность подается на него и в каком направлении.
Двигатель постоянного тока использует магнитное поле, создаваемое электромагнитом, для поворота якоря двигателя. Электромагнит активируется подачей напряжения, поэтому при включении питания магнитное поле, которое он генерирует, заставляет якорь (катушку с проволокой) генерировать собственное нагметическое поле, эти поля отталкивают друг друга и заставляют якорь вращаться.
Чтобы двигатель вращался в обратном направлении, нам нужно изменить подаваемое напряжение на противоположное, что означает, что ток через двигатель будет обратным. К сожалению, переключить направление тока с контроллера, такого как Omega, сложно. В процессорах используются малые токи и напряжения, к тому же они обычно отключаются от двигателя, чтобы индукционная обратная связь не мешала их работе.
Если бы только было какое-то устройство, которое могло бы помочь нам контролировать мощность, которую мы подаем на наши двигатели постоянного тока…
Обратите внимание, что подача тока на обе клеммы может привести к повреждению двигателя.
Как работают H-мосты
H-мост – это схема, которая позволяет приложить напряжение к нагрузке в любом направлении. Электрический ток течет от источника к земле, и многие компоненты необходимо ориентировать в соответствии с направлением тока, чтобы они работали должным образом. H-мост – это схема, построенная для изменения направления напряжения и, следовательно, тока, протекающего к нагрузке.
С точки зрения электричества, нагрузка – это любая часть цепи, которая потребляет электроэнергию для выполнения определенных задач – нагрева, включения, зажигания и т. Д.
H-мост состоит из четырех переключателей: двух последовательно и двух параллельно, причем нагрузка помещается между переключателями. В этой конфигурации схема имеет Н-образную форму.
Для изменения направления подаваемого напряжения H-мост управляет переключателями, которые подают питание на нагрузку ( S1 ). Глядя на диаграмму, если мы закроем S1 и S4 , оставив остальные открытыми, напряжение будет подаваться на двигатель слева направо.Если вместо этого замыкаются S2 и S3 , а остальные открываются, напряжение будет подаваться справа налево.
Эта конфигурация может вызвать короткое замыкание, поэтому большинство H-мостов не позволяют напрямую управлять этими переключателями.
Типичные приложения
Некоторые из типичных применений схем H-Bridge: * Создайте переменный ток (переменный ток) из источника постоянного тока, используя сигнал ШИМ для управления H-мостом. Это процесс, известный как инверсия мощности.* Обеспечивает возможность обратного тока через двигатель постоянного тока, позволяя вращение в любом направлении.
Кроме того, H-мосты позволяют питать нагрузки независимо от управляющих сигналов, которые ими управляют, обеспечивая изоляцию цепи.
ШИМ-сигнал управляет двигателем за счет очень быстрого включения и выключения источника питания. Обычно это можно сделать, отправив сигнал ШИМ на транзистор, и транзистор переключит источник питания. Изменяя ширину импульса сигнала ШИМ, можно управлять скоростью двигателя.H-мост может заменить транзистор и добавить функциональность, позволяя легко изменять направление тока. Мы по-прежнему отправляем пульсирующий сигнал на H-мост, чтобы контролировать скорость, за исключением того, что теперь мы можем переключать направление тока, изменяя, какие переключатели разомкнуты.
В нашей схеме мы будем использовать микросхему H-мостовой интегральной схемы ( IC ), поэтому нам не нужно самостоятельно подключать внутренние компоненты и предотвратить короткие замыкания, которые могли бы возникнуть, если бы мы напрямую управляли этими переключателями.
Если вы хотите начать строительство прямо сейчас, переходите к следующему разделу. Если вы хотите узнать, как сигналы нашего кода будут управлять двигателем, читайте дальше!
Чип SN754410 H-Bridge
Микросхема SN754410 содержит два H-моста, что дает нам четыре выхода, что позволяет нам управлять двумя двигателями постоянного тока. А пока мы будем управлять одним двигателем.
Таким образом, вместо переключателей 1/2/3/4 мы будем переключать 1A и 2A (как показано в таблице данных).В этом руководстве мы будем использовать один из двух H-мостов для управления мощностью, подаваемой на два входа вашего двигателя постоянного тока. В частности, пара входов и выходов ( 1A , 2A и 1Y , 2Y ) на левой стороне микросхемы.
На микросхеме 1A контролирует полярность 1Y , то же самое касается 2A и 2Y . На очень высоком уровне эта микросхема H-моста изменяет выходное напряжение (на контакты с меткой Y ) в соответствии с входным напряжением, подаваемым на контакты с меткой A .Например, отправка высокого уровня на номер 1A отправит то же самое на номер 1Y . Разница в том, что сигнал, отправляемый на контакты Y , использует напряжение, подаваемое на контакт 8 , независимо от входного напряжения.
Напряжение действует как водопад – оно всегда посылает ток, текущий от источника напряжения (вверху) на землю (внизу). Вы можете представить себе источник как HIGH и заземленный как LOW . Таким образом, если вы подключите двигатель к 1Y и 2Y , он будет двигаться только в том случае, если они будут посылать различных сигналов .
Штырь 1,2EN просто включает или выключает H-мост. Если 1,2EN видит «высокий», то все, что мы рассмотрели выше, происходит как обычно, если он выключен, то на выходы ничего не будет отправлено, независимо от того, какие установлены 1A и 2A к.
За счет внедрения H-моста таким образом – с двумя переключателями вместо четырех независимых – микросхема удобно справляется с ситуациями короткого замыкания и упрощает работу H-моста.
Создание схемы
Эта цепь подключает Omega к двигателю постоянного тока. Сначала Omega будет подключен к модулю расширения PWM, модуль расширения PWM будет посылать сигналы на H-мост, который будет подавать питание на двигатель постоянного тока в соответствии с сигналами. ШИМ будет сигнализировать, с какой скоростью должен вращаться двигатель, а H-мост действует как переключатель, включающий или выключающий напряжение питания в соответствии с сигналом ШИМ.
На рисунках вы видите несколько более коротких проводов, которые мы использовали вместо перемычек, чтобы вы могли лучше понять, что происходит.Чтобы легче было видеть вращение мотора, мы обмотали его изолентой.
Примечание : Как видно выше, микросхема является примерно зеркальной. Верхний правый и нижний левый контакты являются источником питания для выходов ( контакт 8 ) и микросхемы ( контакт 16 ) соответственно. Разница между двумя выводами питания заключается в том, что напряжение, подаваемое на выходы, может достигать 36 В, в то время как напряжение, подаваемое на микросхему, рекомендуется в пределах 2 ~ 5 В.Если вы хотите запитать большой двигатель, вы должны запитать двигатель от внешнего источника через контакт 8 и подать примерно 3 В на контакт 16 .
Вот диаграмма, к которой можно вернуться, если что-то пойдет не так:
Что вам понадобится
Вам может понадобиться пара резинок и блок, чтобы удерживать двигатель постоянного тока во время его работы. В целом, вот что вы будете использовать для создания схемы:
- 1x Omega2 подключен к док-станции расширения
- 1x PWM Expansion, подключенный к Expansion Dock выше
- 1x двигатель постоянного тока
- 1x H-мост (имеет «SN754410» наверху микросхемы)
- 1x Макетная плата
- 3x переключателя SPDT
- Перемычки
Подключение компонентов
При работе с ИС установка направляющих на макетной плате может быть очень полезной для уменьшения беспорядка.В этом случае мы сначала сделаем это, чтобы сократить количество необходимых проводов.
- Соедините отрицательные (
-) шины с обеих сторон платы вместе на одном конце (обычно это конец от большей части проводки) с помощью перемычки M-M, которую мы назовем шинойGND. - Сделайте то же самое с положительными рельсами (
+), в этом случае мы назовем эти рельсыVcc.
Теперь давайте настроим нашу схему:
- Возьмите H-мост, выберите место на макете и подключите H-мост через канал в середине макета.Он должен располагаться поперек, одной стороной в столбце E, а другой – в столбце F, при этом полукруг с вырезом направлен к концу макета. Мы выбрали строки с 5 по 12 на нашей макетной плате.
- Обратите внимание на номер каждого вывода на схеме выше – если вы заблудились, всегда ищите небольшой вырез в виде полукруга на микросхеме, обозначающий «верх» H-образной перемычки, чтобы правильно сориентировать его.
- Это важно, вы можете повредить H-мост, если он подключен неправильно!
- Давайте сначала подключим все заземляющие соединения – контакты
4,5,12и13на H-мосте – это все контакты заземления, поэтому давайте подключим их к шинеGNDна их соответствующие стороны с помощью четырех перемычек MM.Мы использовали короткие провода, чтобы вы могли видеть, что происходит.
- Теперь пришло время подключить двигатель к H-мосту. Двигатель должен иметь два провода с штыревыми разъемами, один красный и один черный. Они будут подключены к контактам H-образного моста через макетную плату.
- Подключите белый провод к
1YH-образного моста (ряд 7 на нашей макетной плате). - Подключите черный провод к
2YH-образного моста (ряд 10 на нашей плате).
- Подключите белый провод к
- Далее мы настроим переключатели – мы будем использовать их для управления цифровыми сигналами, отправляемыми на модуль расширения PWM и, в свою очередь, на двигатель через H-мост:
- Выберите три набора из трех рядов (мы использовали ряды с 14 по 24)
- Подключайте переключатели в ряды, по три ряда на переключатель – для каждого переключателя требуется зазор в половину ряда между следующим переключателем, если вы хотите разместить их рядом.
- С помощью 6 перемычек M-M подключите крайний левый ряд каждого переключателя к шине
GND, а крайний правый ряд каждого переключателя – к шинеVcc.
Теперь, когда схема H-моста готова, давайте подключим все это к вашему Omega, чтобы он мог управлять двигателем:
- Мы заземлим схему, подключив шину
GNDк контактуGNDна каналеS0на расширении PWM с помощью одной перемычки M-F. - Используя 3 перемычки M-M, подключите центральный ряд каждого переключателя к Omega GPIO0, GPIO1 и GPIO2 на разъемах расширения. Убедитесь, что вы помните, что есть что, поскольку они будут управлять вашим двигателем позже!
- Возьмите одну перемычку M-M и подключите
1,2ENна ИС (ряд 5 на нашей плате) к шинеVcc. - Используя две перемычки M-F,
- Подключите
1Aили строку 6 на нашей плате к каналуS0. - Подключите
2Aили ряд 11 к каналуS1.
- Подключите
- И последнее, но не менее важное: мы установим питание на шину Vcc, подключив свободный конец перемычки Vcc (красный) к контакту
VccканалаS0расширения PWM.
Вот как это выглядит, когда все подключено:
Меры предосторожности при подключении
Возможно, вы заметили, что мы подключили все компоненты макетной платы и соединения GPIO сначала с до , подключив основную линию питания.Мы делаем это, чтобы свести к минимуму риск ошибок при подключении и подачи питания в цепь, которая потенциально может повредить компоненты или Omega. Это хорошая практика, и мы будем строить схемы таким образом на протяжении всех экспериментов.
Если вы действительно хотите убедиться, что ваши компоненты в безопасности перед проведением эксперимента, вы можете оставить Omega выключенным, прежде чем подключать питание к цепи. Как только все будет подключено, вы можете снова включить Omega.
Есть причина, по которой мы используем контакты
GNDиVccна PWM Expansion вместо контактов заголовка от док-станции. Если он подключен к контактам заголовка, двигатель будет передавать напряжение на док-станцию расширения. Это может вызвать цикл загрузки или другое непредсказуемое поведение омеги. ВыводыVcc/GNDрасширения PWM имеют диоды отключения цепи для предотвращения этого.
Написание кода
Давайте добавим определение класса двигателя постоянного тока, управляемого H-мостом, к двигателям .py , который мы создали в предыдущем эксперименте. Это определение класса будет специально управлять двигателем постоянного тока, подключенным к H-мосту. Он основан на абстракциях класса OmegaPwm и заботится о деталях при эксплуатации двигателя.
Откройте motors.py из эксперимента Dimming LEDs и добавьте следующее:
H_BRIDGE_MOTOR_FORWARD = 0
H_BRIDGE_MOTOR_REVERSE = 1
класс hBridgeMotor:
"" "Класс, состоящий из двух цифровых сигналов и сигнала ШИМ для управления H-мостом" ""
def __init __ (self, pwmChannel, fwdChannel, revChannel):
# обратите внимание на каналы
себя.pwmChannel = pwmChannel
self.fwdChannel = fwdChannel
self.revChannel = revChannel
# настраиваем объекты
self.pwmDriver = OmegaPwm (self.pwmChannel)
self.pwmDriver.setDutyCycle (0)
self.fwdDriver = OmegaPwm (self.fwdChannel)
self.fwdDriver.setDutyCycle (0)
self.revDriver = OmegaPwm (self.revChannel)
self.revDriver.setDutyCycle (0)
# устанавливаем ограничения
self.minDuty = 0
self.maxDuty = 100
def setupMinDuty (self, duty):
"" "Установить минимально допустимый рабочий цикл для ШИМ" ""
себя.minDuty = долг
def setupMaxDuty (self, duty):
"" "Установить максимально допустимый рабочий цикл для ШИМ" ""
self.maxDuty = долг
def сброс (сам):
"" "Установите PWM на 0%, отключите оба элемента управления H-Bridge" ""
ret = self.pwmDriver.setDutyCycle (0)
ret | = self.fwdDriver.setDutyCycle (0)
ret | = self.revDriver.setDutyCycle (0)
возвратиться
def spin (себя, направление, долг):
"" "Установите ШИМ на указанную нагрузку и в указанном направлении" ""
ret = 0
# 0 - вперед, 1 - назад
если (направление == H_BRIDGE_MOTOR_FORWARD):
себя.revDriver.setDutyCycle (0)
self.fwdDriver.setDutyCycle (100)
elif (direction == H_BRIDGE_MOTOR_REVERSE):
self.fwdDriver.setDutyCycle (0)
self.revDriver.setDutyCycle (100)
еще:
ret = -1
если (ret == 0):
# проверяем минимальное и максимальное значение pwm
если долг self.maxDuty:
обязанность = self.maxDuty
# запрограммировать рабочий цикл
ret = self.pwmDriver.setDutyCycle (обязанность)
возвратиться
def spinForward (self, duty):
ret = self.spin (H_BRIDGE_MOTOR_FORWARD, долг)
возвратиться
def spinReverse (self, duty):
ret = self.spin (H_BRIDGE_MOTOR_REVERSE, долг)
возврат ret Теперь давайте напишем код эксперимента. Этот код заставит мотор делать что-то с помощью класса hBridgeMotor, который мы создали выше. Сценарий попросит вас ввести некоторые числа и запустит двигатель в зависимости от вашего ввода!
Создайте файл с именем MAK03-hBridgeExperiment.py и вставьте в него следующий код:
от Motors import hBridgeMotor
импортировать лукGpio
время импорта
# настроить каналы расширения PWM, подключенные к H-Bridge IC
H_BRIDGE_1A_CHANNEL = 0
H_BRIDGE_2A_CHANNEL = 1
H_BRIDGE_12EN_CHANNEL = 2
# создаем экземпляры объектов gpio для наших входов переключателя
directionGPIO = onionGpio.OnionGpio (0)
speed1GPIO = onionGpio.OnionGpio (1)
speed2GPIO = onionGpio.OnionGpio (2)
# создать словарь функций, по которым будет проверяться ввод пользователя
# это в основном таблица диспетчеризации для сопоставления вызовов функций с разными именами
motorCommands = {
'000': (лямбда-мотор: мотор.сброс настроек()),
'001': (лямбда-двигатель: motor.spinForward (50)),
'010': (лямбда-двигатель: motor.spinForward (60)),
'011': (лямбда-двигатель: motor.spinForward (70)),
'100': (лямбда-двигатель: motor.reset ()),
'101': (лямбда-двигатель: motor.spinReverse (50)),
'110': (лямбда-двигатель: motor.spinReverse (60)),
'111': (лямбда-двигатель: motor.spinReverse (70)),
}
def main ():
# создать экземпляр моторного объекта
мотор = hBridgeMotor (H_BRIDGE_12EN_CHANNEL, H_BRIDGE_1A_CHANNEL, H_BRIDGE_2A_CHANNEL)
команда = '000';
# цикл навсегда
в то время как (Истина):
# спит ненадолго, чтобы разместить переключатели
время.сон (0,5)
# получает сигналы, проходящие через переключатели
commandNew = directionGPIO.getValue () [0]
commandNew = commandNew + speed1GPIO.getValue () [0]
commandNew = commandNew + speed2GPIO.getValue () [0]
# переводит команду в формат motorCommands
commandNew.replace ('\ п', '')
# проверяем ввод пользователя по словарю, запускаем соответствующую функцию
# но только если команда изменилась, нет необходимости продолжать вызывать ту же команду
если (команда! = commandNew):
command = commandNew
motorCommands [команда] (двигатель)
если __name__ == '__main__':
основной () Чего ожидать
При запуске сценарий запускает генератор ШИМ, а затем устанавливает выход, который должен быть включен (канал от 0 до 100% нагрузки).Затем скрипт попросит вас ввести набор из 3 цифр, первая из которых задает направление двигателя, следующие две цифры задают скорость. Программа будет повторно запрашивать ввод и соответственно регулировать скорость и направление.
| Первая цифра | 0 | Двигатель вращается по часовой стрелке |
| 1 | Двигатель вращается против часовой стрелки | |
| Последние две цифры | 00 | от |
| 01 | Скорость 50% | |
| 10 | 60% скорость | |
| 11 | Скорость 70% |
Вот он в действии:
Как вы, наверное, видели раньше, здесь мы используем бесконечный цикл, и вы можете прервать его, нажав Ctrl-C .
Примечание : Мы рекомендуем установить двигатель на 000 перед разрывом контура, чтобы не повредить двигатель. Напоминаем, что вы можете просто позвонить по номеру pwm-exp -s , чтобы остановить двигатель через терминал или ssh.
Подробный взгляд на код
В этом опыте мы объединили знания из предыдущих опытов для управления двигателем постоянного тока с помощью Python. Теперь принимает пользовательский ввод в интерактивном режиме, что позволяет нам изменять вывод в режиме реального времени.3 = 8 различных состояний системы переключения. Это означает, что нам действительно нужно учитывать только 8 отдельных случаев ввода.
К сожалению, это не всегда так просто, и хорошей практикой является предположение, что могут быть получены все виды различных входных данных. Здесь хорошая проверка ошибок происходит прямо в начале взаимодействия, ограничивая количество доступных состояний ввода – у нас есть только три переключателя. Если бы мы позволили пользователям вводить произвольные команды, нам пришлось бы проводить гораздо больше проверки.
Таблицы поиска
Вы можете заметить, что ввод, введенный пользователем в основном цикле, всегда проверяется по переменной motorCommands – эта переменная хранит набор известных значений, которые нужно проверить. В нашем случае таблица содержит допустимый вход переключателя, соответствующий его соответствующему выходу – также известному как пара ключ-значение – и сценарий отправляет выходные данные контроллеру PWM, если вход, полученный от пользователя, совпадает с любым значением в таблице.
Проверяя ввод по таблице поиска перед отправкой команд, мы можем гарантировать, что ошибочные команды не будут отправлены.Добавьте к этому правильную калибровку, и мы сможем значительно снизить риск удаленного управления оборудованием.
Пределы управления двигателем с ШИМ
Двигателипостоянного тока для работы полагаются на приложенное напряжение, а использование ШИМ означает, что двигатель фактически «откручивается» серией импульсов. Это все равно, что толкать ящик, чтобы он сдвинулся с места, а не постукивать по нему очень быстро. Точно так же, как требуется минимальное усилие, необходимое для нажатия, чтобы привести коробку в движение, существует предел того, насколько коротким может быть каждое нажатие, прежде чем двигатель не среагирует на него.
То есть, если ширина импульса ниже определенного порога, двигатель не запустится. При тестировании ширина импульса, необходимая для запуска двигателя, составляет около 10 мс – около 50% нагрузки при 50 Гц.
Попробуйте различные настройки двигателя и посмотрите, как он себя ведет. Если вы тестируете проект с двигателями и хотите замедлить его для отладки, помните об ограничениях ШИМ-управления двигателями, чтобы сэкономить много времени!
В следующий раз мы напишем текст на экран.
Dc Motor – обзор
Трехфазные асинхронные двигатели
- 2
In d.c. В двигателях, описанных в главе 21, проводники вращающегося якоря проходят через стационарное магнитное поле. В трехфазном асинхронном двигателе магнитное поле вращается, и это имеет то преимущество, что не требуется выполнять внешние электрические соединения с ротором. В результате получается двигатель, который: (i) дешев и надежен, (ii) является взрывозащищенным из-за отсутствия коммутатора или контактных колец и щеток с их искрообразованием, (iii) требует небольшого или не требует квалифицированного обслуживания, и (iv) имеет самозапускаемые свойства при переключении на питание без дополнительных затрат на вспомогательное оборудование.Основным недостатком трехфазного асинхронного двигателя является то, что его скорость не может быть легко отрегулирована.
- 3
Создание вращающегося магнитного поля. Когда трехфазный источник питания подключен к симметричным трехфазным обмоткам статора, токи, протекающие в обмотках, создают магнитное поле. Это магнитное поле имеет постоянную величину и вращается с постоянной скоростью, как показано ниже, и называется синхронной скоростью .
Со ссылкой на рисунок 22.1 обмотки представлены тремя одноконтурными проводниками, по одному на каждую фазу, обозначенными R S R F , Y S Y F и B s B F , S и F означает начало и конец. На практике каждая фазная обмотка состоит из множества витков и распределена вокруг статора; однопетлевой подход предназначен только для ясности.
Рисунок 22.1.
Когда обмотки статора подключены к трехфазному источнику питания, ток, протекающий в каждой обмотке, изменяется со временем, как показано на рисунке 22.1 (а). Если значение тока в обмотке положительное, предполагается, что он течет от начала до конца обмотки, т.е. если это красная фаза, ток течет от R s к R F ,
то есть от зрителя в R s и к зрителю в R F . Когда значение тока отрицательное, предполагается, что он течет от конца к началу, то есть к зрителю по S-образной обмотке и от зрителя по F-обмотке.
В момент времени t 1 , показанного на рисунке 22.1 (a), ток, протекающий в красной фазе, является максимально возможным значением. В то же время, t 1 , токи, протекающие в желтой и синей фазах, в 0,5 раза превышают максимальное значение и являются отрицательными. Таким образом, распределение тока в обмотках статора показано на рисунке 22.1 (b), на котором ток течет от наблюдателя (обозначен X) в R s , поскольку он положительный, но к наблюдателю (обозначен как ˙) в Y S и B s , поскольку они отрицательны.Результирующее магнитное поле, как показано, является результатом действия «соленоида» и применения правила штопора.
Немного позже, в момент времени t 2 , ток, протекающий в красной фазе, упал примерно в 0,87 раза от своего максимального значения и является положительным, ток в желтой фазе равен нулю, а ток в синей фазе примерно в 0,87 раза больше максимального значения и является отрицательным. Следовательно, токи и результирующее магнитное поле показаны на Рисунке 22.1 (c). В момент времени t 3 токи в красной и желтой фазах равны 0.5 их максимальных значений, а ток в синей фазе – максимальное отрицательное значение. Токи и результирующее магнитное поле показаны на Рисунке 22.1 (d).
Схемы, подобные рисунку 22.1 (b), (c), (d), могут быть получены для всех значений времени, и они покажут, что магнитное поле проходит один оборот за каждый цикл напряжения питания, приложенного к обмоткам статора. Рассматривая значения магнитного потока, а не текущие значения, можно показать, что вращающееся магнитное поле имеет постоянное значение магнитного потока.
- 4
Вращающееся магнитное поле, создаваемое трехфазными обмотками, могло быть создано вращением северного и южного полюсов постоянного магнита с синхронной скоростью (обозначенные как N и Sat концы векторов потока на рисунке 22.1 (b)) , (в) и (г)). По этой причине он называется 2-полюсной системой, а асинхронный двигатель, использующий только трехфазные обмотки, называется 2-полюсным асинхронным двигателем.
Если используются шесть обмоток, смещенных одна относительно другой на 60 °, как показано на рисунке 22.2 (b), путем построения диаграмм тока и результирующего магнитного поля при различных значениях времени можно показать, что один цикл подачи тока на обмотки статора заставляет магнитное поле перемещаться на половину оборота. Распределение тока в обмотках статора показано на рисунке 22.2 (b), для времени t показано на рисунке 22.2 (a).
Рисунок 22.2.
Можно видеть, что для шести обмоток статора создаваемый магнитный поток такой же, как и при вращении двух северных полюсов постоянного магнита и двух южных полюсов постоянного магнита с синхронной скоростью.Это называется 4-полюсной системой, а асинхронный двигатель с шестью фазными обмотками называется 4-полюсным асинхронным двигателем. Увеличивая количество фазных обмоток, количество полюсов может быть увеличено до любого четного числа. В общем, f – это частота токов в обмотках статора и намотки статора, эквивалентная p парам полюсов, скорость вращения вращающегося магнитного поля, то есть синхронная скорость, n s определяется по:
- 5
Принцип работы трехфазного асинхронного двигателя
Статор трехфазного асинхронного двигателя – это неподвижная часть, соответствующая ярму d.c. машина. Он намотан для создания 2-полюсного, 4-полюсного, 6-полюсного… вращающегося магнитного поля, в зависимости от требуемой скорости ротора. Ротор, соответствующий якорю постоянного тока. Станок изготовлен из ламинированного железа для уменьшения вихревых токов.
В наиболее широко используемом типе, известном как ротор с короткозамкнутым ротором, медные или алюминиевые стержни вставляются в прорези, вырезанные в многослойном чугуне, концы стержней привариваются или спаиваются в тяжелое проводящее кольцо (см. Рисунок 22.3 (а)). Поперечный разрез трехфазного асинхронного двигателя показан на рисунке 22.3 (б).
Рисунок 22.3.
Когда к обмоткам статора подключено трехфазное питание, создается вращающееся магнитное поле. Поскольку магнитный поток режет стержень на роторе, э.д.с. в нем индуцируется, и поскольку он соединен через концевые токопроводящие кольца с другим стержнем, находящимся на расстоянии одного шага полюса, в стержнях течет ток. Магнитное поле, связанное с этим током, протекающим в стержнях, взаимодействует с вращающимся магнитным полем, и создается сила, стремящаяся повернуть ротор в том же направлении, что и вращающееся магнитное поле (см. Рисунок 22.4).
Рисунок 22.4.
- 6
Скольжение
Сила, создаваемая стержнями ротора, заставляет ротор вращаться в направлении вращающегося магнитного поля. По мере увеличения скорости ротора скорость, с которой вращающееся магнитное поле режет стержни ротора, становится меньше, и частота наведенных ЭДС в стержнях ротора меньше. Если ротор вращается с той же скоростью, что и вращающееся магнитное поле, в роторе не индуцируются ЭДС, следовательно, на них нет силы и крутящего момента на роторе.Таким образом ротор замедляется. По этой причине ротор никогда не может работать с синхронной скоростью.
Когда на ротор нет нагрузки, силы сопротивления из-за ветра и трения в подшипниках малы, и ротор вращается почти с синхронной скоростью. Когда ротор нагружен, скорость падает, и это вызывает увеличение частоты наведенных ЭДС в стержнях ротора и, следовательно, возрастает ток, сила и крутящий момент ротора. Разница между скоростью ротора n r и синхронной скоростью n s называется скоростью скольжения, т.
