
КИТАЙСКАЯ РАДИОУПРАВЛЯЕМАЯ МАШИНКА
Раньше даже близко не было такого изобилия товаров вообще и игрушек в частности. И во многом современный детский рай обязан прогрессу в электронике. Говорящие роботы, мультикоптеры, роботы-шпионы – всё это не просто есть в магазинах, а продаётся по очень недорогой, для многих, цене. К тому же игрушки иногда бывают настолько продвинутые в плане радиоэлектронной начинки и интересные по работе, что тут впору покупать их не для детей, а для себя. Тем более если отец радиолюбитель 🙂 В общем случайно проходя мимо витрины магазина “Всё по доллару” заметил коробку с китайской радиоуправляемой машинкой, которая стоила всего 10$! Естественно это за весь комплект.
Комплектация Р/У машинки
- Машина – гоночный автомобиль
- Пульт дистанционного управления
- Четыре аккумулятора 1,2 В 600 мА/ч
- Зарядное устройство 4,8 В 250 мА
Характеристики авто на радиоуправлении
- Питание машинки – 4 шт.
- Питание пульта – 3 пальчиковые батарейки АА
- Время заряда – 5 часов
- Время работы – пол часа
- Частота радиоканала – 27 МГц
- Дальность действия радиоканала – 10 метров
На коробке всё написано по китайски – ни одного не то что русского – даже английского слова. Что ж, время учить китайский или развивать интуицию 🙂 Сложного по идее ничего нет: вставил аккумуляторы в авто, три батарейки в пульт – и поехали.
Пульт управления машинкой
Обратите внимание, в комплект не входят батарейки для ПДУ, только к автомобилю. Так что понадобится 3 элемента АА по 1,5 В.
Пульт сразу привлёк внимание полным отсутствием кнопок, не считая кнопки включения.
Всё дело в том, что здесь команды на поворот влево-вправо, движение вперёд-назад, подаются наклоном. Если открыть пульт ДУ и изучить плату с деталями, то видно 4 датчика положения. Внутри этих цилиндриков, впаянных с наклоном, и находятся датчики в виде шариков.
Сама микросхема передатчик формата DIP, как и остальные детали, поэтому пульт очень компактный и лёгкий. К нему спереди прикручена телескопическая антенна на 3 колена. Длинна в разложенном виде – около 30 см. Если вы стоите рядом с авто – можно и не раскладывать её. Но при дальности свыше 5 м это необходимо.
Радиоуправляемая машина
Прежде чем установить аккумуляторы в батареечный отсек авто, необходимо их зарядить. Для этого в комплекте есть маленькой зарядное устройство, естественно импульсное.
Плата внутри него – копия обычной зарядки от мобильного телефона. И параметры (и схема) аналогичные – импульсный преобразователь на транзисторе примерно 2-3 ватта.
При включении кнопки машинки (она на днище), все 4 колеса сразу начнут мигать синими и красными светодиодами, установленными изнутри. Это и красиво, и удобно – сразу понятно, что питание активировано. Чтоб не было ситуации, при которой поигрались и забыли обесточить авто, посадив или вообще угробив аккумуляторы.
Разберём её тоже и заглянем под крышку. Приёмная часть собрана на базе микросхемы RX-2B. Схемы включения вы можете посмотреть здесь, они стандартны для большинства радиоуправляемых моделей 27 МГц, малого радиуса действия.
А транзисторы С945 коммутируют два моторчика – основной, что находится в задней части авто, и вспомогательный, ответственный за поворот передних колёс.
Фары спереди засвечиваются когда машина едет вперёд. При заднем ходе они сразу гаснут. Интересно, что тут применили не светодиоды, а лампочки. Это конечно более реалистично, но расход энергии увеличивается почти на 100 мА, поэтому для экономии просто перерезал ножницами провода, идущие к ним от платы управления.
Видеоролик работы машинки
В общем китайцы в очередной раз удивляют не столько технологиями, хотя они держат руку на пульсе и постоянно пополняют рынок новыми интересными девайсами, а возмутительно низкой ценой.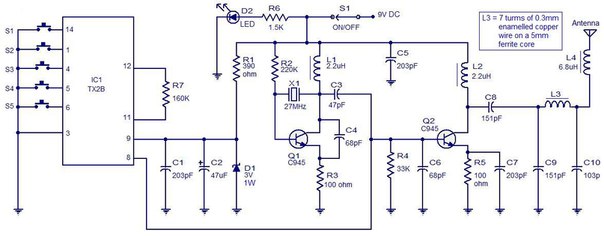 Подумайте, сколько бы стоили отдельно 4 аккумулятора? А зарядное устройство? Не говоря про остальное. Что касается качества: ребёнок играет уже больше месяца и ничего, машина жива-здорова, хотя перезаряжалась уже раз 20.
Подумайте, сколько бы стоили отдельно 4 аккумулятора? А зарядное устройство? Не говоря про остальное. Что касается качества: ребёнок играет уже больше месяца и ничего, машина жива-здорова, хотя перезаряжалась уже раз 20.
Схема радиоуправляемой машинки и установка платы
Здравствуйте, в этой статье соберем набор радиоуправляемой машинкиМашинка работает на двух батарейках типа АА 1.5V управляется двух канальным пультом.
Набор получаем в запаянном пакете.
Комплектация:
— пластиковая крепежная площадка 75 х 120 мм.
— пластиковые шайбы (устанавливаются на ось между колесами и основной пластиной)
— болтики, гайки, крепежные уголки.
— коллекторный электро моторчик
— бокс под две батарейки типа АА 1.5V.
— бокс из ползунковым выкл/вкл. под две батарейки типа АА 1.5V.
— радиоприемник + передатчик
— антенны (2 шт.)
— инструкция по сборке набора
С комплектации берем вот эти уголочки и крепим их болтиками к основной пластине.
Колеса уже на своем месте)))
Замучу что пластиковые шайбы размещаем на оси между колесом и основой машины.
Как видим в комплекте идут по две одинаковые шестерни, нам пригодится только пара, маленькая шестерня на мотор и большая на вал колес.
В итоге в запас получаем пару запасных шестерен.
Ставим следующую пару колес.
Большую шестерню продеваем на ось колес.
Смотрим место под установку мотора.
Как понятно шестерня на валу мотора будет передавать усилие на большую шестерню одетую на оси колес.
Я думаю ребенок правильно собрал этот узел, чему я рад, все таки это не первый собранный такого плана набор.
Установили ползунковый выключатель.
Закрепили одним болтиком ползунковый выключатель.
Расположили и зафиксировали кассету под установку батареек.
Пора рассматривать модуль радиопередатчика и приемника.
Плата радиоприемника
Маркировка на плате:
— В+ (подключение питания платы, плюсовой контакт)
— В- (подключение питания платы, минусовой контакт, подключим его через выключатель)
— F (вывод подключения мотора)
— F (вывод подключения мотора)
— ANT (провод идущий на антенну)
Почему ребенок держит паяльник в левой руке? Ему так удобнее он и пишет левой.
По идее плата радиоприема должна быть на месте батарейного отсека, я об этом говорил ребенку, но он решил разместить большой вес по центру машины,
Тык, вроде все на месте.
Модуль радиопередачи
Собственно детали пульта управления:
— бокс под две батарейки типа АА 1.5АА
— антенна
— модуль радиопередатчика
Батарейки в комплект не идут.
Крышка отсека фиксируется саморезом, заменив его на чуть больше размером прижимаем крышу и модуль.
Рассматриваем подключения радиопередатчика.
Здесь проще простого, соединяем провода по цветам.
Решили не соединять провода, а припаять идущие провода от бокса к плате.
На аккумуляторной коробке находится ползунковый выключатель, то есть, им будем выключать пульт управления.
Размер машинки 12 x 11.7 x 4 cм.
С управлением все понятно, на пульте находятся две кнопки вперед/назад.
Итог, здесь особо и ничего написать, мне главное что ребенок доволен и при этом получил опыт работы с паяльником (он долго ждал когда уже начнутся паяльные работы)
Радиус действия РУ по прямой видимости около 8 м.
На данное время рассматриваем элементную базу, конечно нам это сложно все таки первый класс, но что-то в памяти отложится.
Предлагаю к просмотру видео о сборке и первому запуску машинки (видео в ускоренном режиме).
Товар предоставлен для написания обзора магазином. Обзор опубликован в соответствии с п.18 Правил сайта.
mx1608rx2 машинка радиоуправляемая схема — Камышинские полимерпесчаные изделия
Содержание
Описание
Посмотрев весь контакт и ютуб, офигев от ценников на фабричные рамки-перевертышы, я пришел к выводу, что просто обязан попробовать сделать её сам. Фабричные механические. Любая категория Транспорт Автомобили Мотоциклы и мототехника Грузовики и спецтехника Водный транспорт Запчасти и аксессуары Недвижимость Квартиры Комнаты Дома. Опрокидыватель(перевёртыши) для авто универсальный. 5 000 ₽. Компания. Рамка перевертыш для номеров автомобиля – плюсы, минусы и законность установки.. 9. Как сделать рамку своими руками. 10.
Состав
где можно купить машинку на пульте управления
машинка перевертыш на радиоуправлении купить во владивостоке
отзывы о машинке перевертыш хайпер
машинки на пульте управления казань
крутые радиоуправляемые машинки
машинка лего на пульте управления цена
Эффект от применения
Дети в восторге от того, что не нужно идти и ставить на колеса машинку каждый раз когда она перевернулась. Можно ехать любой стороной. Резиновые мягкие колеса, наполненные воздухом, амортизируют все удары о препятствия и не дают корпусу и внутренним механизмам треснуть. где можно купить машинку на пульте управления машинка перевертыш на радиоуправлении купить во владивостоке отзывы о машинке перевертыш хайпер машинки на пульте управления казань Машинка-перевёртыш на радиоуправлении — это увлекательная, современная игрушка для детей и взрослых, любящих машинки! Прочная и быстрая — эта машинка не боится переворотов — перевернувшись, спокойно поедет дальше. Она может двигаться в любых направлениях — вперёд, назад, боком, вращаться на месте.
Она может двигаться в любых направлениях — вперёд, назад, боком, вращаться на месте.Мнение специалиста
Машинка вызывает восторг не только тем, что она едет- в бок, прямо, назад, но в-первую очередь способом управления. Машинка повинуется малейшим движениям руки, пальцев. Она становится с Вами единым целым! Это именно тот случай, когда взрослые завидуют свом детям и отбирают у них игрушки! Отзывы о mx1608rx2 машинка радиоуправляемая схема
Реальные отзывы о mx1608rx2 машинка радиоуправляемая схема.
Способ применения
Машинка вызывает восторг не только тем, что она едет- в бок, прямо, назад, но в-первую очередь способом управления. Машинка повинуется малейшим движениям руки, пальцев. Она становится с Вами единым целым! Это именно тот случай, когда взрослые завидуют свом детям и отбирают у них игрушки!
Как заказать?
Заполните форму для консультации и заказа mx1608rx2 машинка радиоуправляемая схема.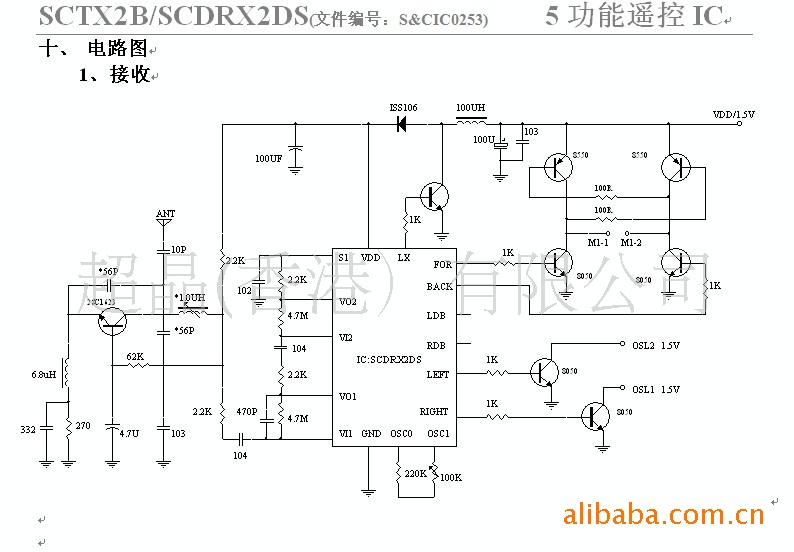 Оператор уточнит у вас все детали и мы отправим ваш заказ. Через 1-10 дней вы получите посылку и оплатите её при получении.
Оператор уточнит у вас все детали и мы отправим ваш заказ. Через 1-10 дней вы получите посылку и оплатите её при получении.
Отзывы покупателей:
Микруха стоит RX-2B. Ничего не сгорело – запаха нету. Первый раз сталкиваюсь с данной проблемой, не могу определить причину выхода из строя и, соответственно, способа её устранения. Прошу помощи у Вас, более понимающих людей. Нашёл старую схему от радиоуправляемой машинки. Кто-то пообрывал все провода, подскажите пожалуйста, что и куда паять.. Роботы и модели на ДУ-управлении. Схема Радиоуправляемой Модели На Rx-2. Комплектация Р/У машинки. Машина – гоночный автомобиль.. Радиоуправляемая машина. Прежде чем установить аккумуляторы в батареечный отсек авто, необходимо их зарядить.. Приёмная часть собрана на базе микросхемы RX-2B. Схемы включения вы можете посмотреть здесь, они стандартны для. Дешевые lot lot, купить качество lot 10pcs непосредственно из Китая lot 100 Поставщики: 10 шт./лот MX1608RX2 MX1608RX MX1608 SOP16.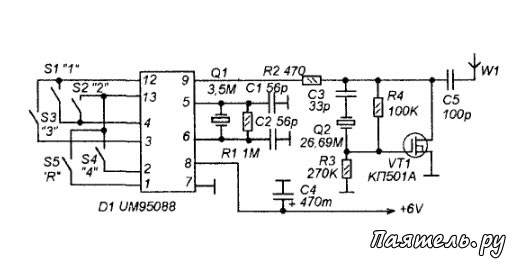 большое спасибо, посылочку прислали быстро,все подошло, машинка работает, ребенок доволен. 02 Mar 2019 06:20. Axxxv. Метки: rc, car, bt, arduino. Досталась мне машинка на радиоуправлении без пульта и батареи.. микросхема RX-2.. Схема для управления: А почему бы и не попробовать! Заказал у китайцев: 1. Arduino Pro Mini 2. BT модуль 3. Программатор. Схемы, справочники, документация, советы мастеров.. микросхема l293 не подходит машина не едет и микросхема очень сильно греется микросхема BA6209 тоже не подходит машинка едет но очень вяло. | Re: Частота радиоуправляемой модели. #9117. Автор: Сомов.С. Дата: 16 марта 2010 23:55.. Приемник в такой машинке по схеме сверхрегенератора.. 1 оторвите наклейку с микросхемы. под ней должна быть маркировка похожая на RX2B.проверяем сервы на машинке – поочередно замкните дорожку приходящую. 4 кидайте первый провод с земли пульта на землю машинки 5 второй – через резистор 1-2 кОм соедините 8 ножку TX2B и 3 ножку RX2B. Схема и инструкция по сборке машинки на радиоуправлении.
большое спасибо, посылочку прислали быстро,все подошло, машинка работает, ребенок доволен. 02 Mar 2019 06:20. Axxxv. Метки: rc, car, bt, arduino. Досталась мне машинка на радиоуправлении без пульта и батареи.. микросхема RX-2.. Схема для управления: А почему бы и не попробовать! Заказал у китайцев: 1. Arduino Pro Mini 2. BT модуль 3. Программатор. Схемы, справочники, документация, советы мастеров.. микросхема l293 не подходит машина не едет и микросхема очень сильно греется микросхема BA6209 тоже не подходит машинка едет но очень вяло. | Re: Частота радиоуправляемой модели. #9117. Автор: Сомов.С. Дата: 16 марта 2010 23:55.. Приемник в такой машинке по схеме сверхрегенератора.. 1 оторвите наклейку с микросхемы. под ней должна быть маркировка похожая на RX2B.проверяем сервы на машинке – поочередно замкните дорожку приходящую. 4 кидайте первый провод с земли пульта на землю машинки 5 второй – через резистор 1-2 кОм соедините 8 ножку TX2B и 3 ножку RX2B. Схема и инструкция по сборке машинки на радиоуправлении. . Здравствуйте, в этой статье соберем набор радиоуправляемой машинки Машинка работает на двух батарейках типа АА 1.5V управляется двух канальным пультом. Собственно хочу использовать плату-приемник, от радиоуправляемой машинки как драйвер моторов.. Но при попытке подать напряжение на пин от внешнего источника, соответсвенно на тот куда я хочу что б ехала машинка(или поворачива). Значит частота машинок совпадает и сегодня мы расскажем, как изменить частоту радиоуправляемой машинки.. Возникает встречный вопрос, как сменить частоту в пульте и модели на китайских машинках на радиоуправлении?
. Здравствуйте, в этой статье соберем набор радиоуправляемой машинки Машинка работает на двух батарейках типа АА 1.5V управляется двух канальным пультом. Собственно хочу использовать плату-приемник, от радиоуправляемой машинки как драйвер моторов.. Но при попытке подать напряжение на пин от внешнего источника, соответсвенно на тот куда я хочу что б ехала машинка(или поворачива). Значит частота машинок совпадает и сегодня мы расскажем, как изменить частоту радиоуправляемой машинки.. Возникает встречный вопрос, как сменить частоту в пульте и модели на китайских машинках на радиоуправлении?
HYPER PREDATOR не ломается, как другие похожие машинки! Мягкие воздушные колеса, амортизируют все удары о препятствия и не дают корпусу и внутренним механизмам треснуть. Фабричное качество сборки в Китае с контролем качества от фабрики ZHENGGUANG крутые радиоуправляемые машинки. машинка лего на пульте управления цена. машинка перевертыш на радиоуправлении купить в Санкт-Петербурге. радиоуправляемые машинки во владимире. Детские машинки перевертыши на радиоуправлении имеют небольшие размеры и малый вес, поэтому можно не бояться, что попортится мебель или останутся сколы при столкновении с машинкой. Машинки перевертыши, помимо возможности исполнения трюков, имеют собственное музыкальное сопровождение и светодиодную подсветку, что придаст пикантность игре в вечернее время суток.
радиоуправляемые машинки во владимире. Детские машинки перевертыши на радиоуправлении имеют небольшие размеры и малый вес, поэтому можно не бояться, что попортится мебель или останутся сколы при столкновении с машинкой. Машинки перевертыши, помимо возможности исполнения трюков, имеют собственное музыкальное сопровождение и светодиодную подсветку, что придаст пикантность игре в вечернее время суток.
Купить радиоуправляемую машинку перевертыш по самой выгодной цене Вы можете в нашем интернет магазине. Для этого позвоните по указанному номеру и согласуйте с нашим консультантом способы получения игрушки или удобное для Вас время получения игрушки при посылке курьером. Не откладывая на завтра, оформите заказ одним нажатием мыши, и уже в ближайшее время Ваш ребенок будет радоваться новой игрушке! Чаще всего детям становится неинтересно то, что работает по 1-му сценарию. Наша машинка не надоедает, потому что можно ездить по бездорожью или ровным полам в квартире и выполнять различные трюки.
Добавить отзыв
Как подобрать пульт к радиоуправляемой машине?
Накануне ответственных соревнований, перед окончанием сборки KIT комплекта автомобиля, после аварий, в момент покупки авто с частичной сборки и еще в ряде других предсказуемых или спонтанных случаев может возникнуть острая необходимость купить пульт к машинке на радиоуправлении. Как не промахнуться с выбором, и каким особенностям следует уделить отдельное внимание? Именно об этом мы вам расскажем ниже!
Разновидности пультов ДУ
Аппаратура управления состоит из передатчика, с помощью которого моделист посылает команды управления и приемника, установленного на автомодели, который ловит сигнал, расшифровывает его и передает для дальнейшего выполнения исполнительными устройствами: сервомашинками, регуляторами. Именно так машинка едет, поворачивает, останавливается, стоит вам нажать на соответствующую кнопку или выполнить необходимую комбинацию действий на пульте.
Автомоделисты в основном пользуются передатчиками пистолетного типа, когда пульт удерживается в руке по типу пистолета. Под указательным пальцем размещается курок газа. При нажатии назад (к себе), машина едет, если надавить в перед – тормозит и останавливается. Если не прикладывать усилие, то курок будет возвращаться в нейтральное (среднее) положение. Сбоку на пульте расположено небольшое колесо – это не декоративный элемент, а самый главный инструмент управления! С его помощью выполняются все повороты. Вращение колесика по часовой стрелке поворачивает колеса вправо, против – направляет модель влево.
Есть еще передатчики джойстикового типа. Они держатся двумя руками, а управления производится правым и левым стиками. Но такой тип аппаратуры редкость для высококачественных авто. Их можно встретить на большинстве воздушной техники, и в редких случаях – на игрушечных радиоуправляемых машинках.
Поэтому с одним важным моментом, как подобрать пульт к радиоуправляемой машине мы уже разобрались – нам нужно ДУ пистолетного типа. Идем дальше.
Идем дальше.
На какие характеристики нужно обратить внимание при выборе
Несмотря на то, что в любом модельном магазине вы сможете выбрать как простую, бюджетную аппаратуру, так и очень многофункциональную, дорогостоящую, профессиональную, общими параметрами, на которые стоит обратить внимание, будут:
- Частота
- Каналы аппаратуры
- Дальность действия
Связь между пультом для машины на радиоуправлении и приемником обеспечивается с помощью радиоволн, и главный показатель в данном случае – несущая частота. В последнее время моделисты активно переходят на передатчики с частотой 2.4 ГГц, так как она практически не уязвима перед помехами. Это позволяет в одном месте собирать большое количество радиоуправляемых авто и запускать их одновременно, в то время, как аппаратура с частотой 27 МГц или 40 МГц негативно реагирует на присутствие посторонних устройств. Радиосигналы могут перехлестываться и перебивать друг друга, из-за чего контроль над моделью пропадает.
Если вы решили купить пульт управления на радиоуправляемую машинку, вы наверняка обратите внимание на указание в описании количества каналов (2-канальный, 3CH и т.д.) Речь идет о каналах управления, каждый из которых отвечает за одно из действий модели. Как правило, чтобы автомобиль ездил, достаточно двух каналов – работа двигателя (газ/тормоз) и направление движения (повороты). Можно встретить простые машинки-игрушки, у которых третий канал отвечает за дистанционное включение фар.
В навороченных профессиональных моделях третий канал для управления смесеобразованием в ДВС или для блокировки дифференциала.
Этот вопрос интересен многим новичкам. Достаточная дальность действия, чтобы вы могли комфортно себя чувствовать в просторном зале или на пересеченной местности – 100-150 метров, дальше машинка теряется из виду. Мощности современных передатчиков хватает, чтобы передавать команды на расстояние 200-300 метров.
Примером качественного, бюджетного пульта для машины на радиоуправлении является FlySky FS-GT3C. Это 3-канальная система, работающая в диапазоне 2.4ГГц. Третий канал дает больше возможностей для творчества моделиста и расширяет функциональные возможности авто, например, позволяет управлять светом фар или поворотниками. В памяти передатчика можно запрограммировать и сохранить настройки для 10 различных моделей авто!
Это 3-канальная система, работающая в диапазоне 2.4ГГц. Третий канал дает больше возможностей для творчества моделиста и расширяет функциональные возможности авто, например, позволяет управлять светом фар или поворотниками. В памяти передатчика можно запрограммировать и сохранить настройки для 10 различных моделей авто!
Революционеры в мире радиоуправления – лучшие пульты для вашей машины
Применение систем телеметрии стали настоящей революцией в мире радиоуправляемых авто! Моделисту больше не нужно теряться в догадках о том, какую скорость развивает модель, какое напряжение у бортового аккумулятора, сколько топлива осталось в баке, до какой температуры прогрелся двигатель, сколько оборотов он совершает и т.д. Главное отличие от обычной аппаратуры заключается в том, что сигнал передается в двух направления: от пилота к модели и от датчиков телеметрии на пульт.
Миниатюрные датчики позволяют в режиме реального времени мониторить состояние вашего авто. Необходимые данные могут выводиться на дисплей пульта дистанционного управления или на монитор ПК. Согласитесь, очень удобно всегда быть в курсе «внутреннего» состояния авто. Такая система легко интегрируется и просто настраивается.
Необходимые данные могут выводиться на дисплей пульта дистанционного управления или на монитор ПК. Согласитесь, очень удобно всегда быть в курсе «внутреннего» состояния авто. Такая система легко интегрируется и просто настраивается.
Пример пульта «продвинутого» типа – Spektrum DX3R. Аппа работает по технологии “DSM2”, которая обеспечивает максимально точный и быстрый отклик. К другим отличительным особенностям стоит отнести большой экран, на котором в графическом виде транслируются данные о настройках и состоянии модели. Spektrum DX3R считается самой быстрой среди аналогов и гарантированно приведет вас к победе!
В интернет-магазине Planeta Hobby вы без проблем подберете оборудование для управления моделей, сможете купить пульт управления на радиоуправляемую машинку и другую необходимую электронику: приемники, датчики телеметрии, сервоприводы и т.д. Делайте свой выбор правильно! Если не можете определиться самостоятельно, обращайтесь, с радостью поможем!
схемы и конструкции своими руками
Схемы и конструкции радиоуправления, которые несложно собрать своими руками.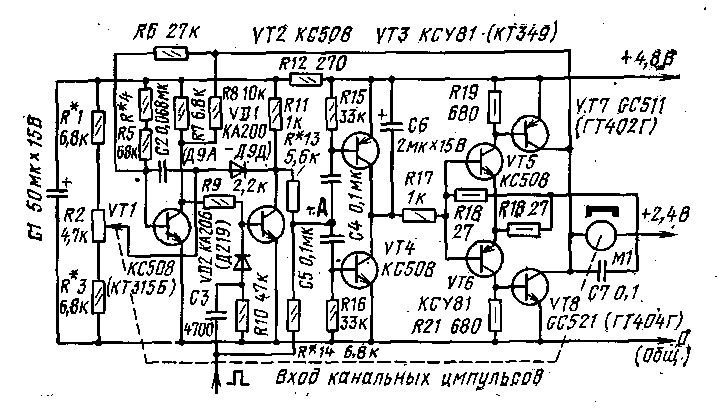 Литература по системам радиоуправления
Литература по системам радиоуправления
– аналоговые схемы радиоуправления;
– разработки на микросхемах;
– схемы радиоуправления на микроконтроллерах;
– готовые модули приемник – передатчик;
– самодельные модули приемник – передатчик;
– применяемые антенны;
– вопросы настройки самодельных модулей
– и многое другое, что связано с радиоуправлением.
1. Четырехкомандная система радиоуправления
2. Передатчик радиоуправления на микросхеме
3. Передатчик и приемник системы радиоуправления
4. Модуль передатчика радиоуправления на цифровой микросхеме
Подборка статей Владимира Днищенко для конструкторов аппаратуры радиоуправления:
Основные принципы пропорционального радиоуправления моделями (1.1 MiB, 9,584 hits)
Формирователи команд для аппаратуры пропорционального управления (805.3 KiB, 4,970 hits)
Рулевые машинки для аппаратуры пропорционального управления (1.1 MiB, 6,460 hits)
Радиоканал для аппаратуры пропорционального радиоуправления (1.5 MiB, 4,378 hits)
Радиоканал на транзисторах для аппаратуры пропорционального радиоуправления (1.2 MiB, 4,527 hits)
Аппаратура пропорционального радиоуправления (8.9 MiB, 5,572 hits)
ПРиемник прямого преобразования на интегральной микросхеме (693.2 KiB, 4,021 hits)
Простой супергетеродин для аппаратуры радиоуправления (764.0 KiB, 4,099 hits)
Радиоканал с частотной модуляцией для аппаратуры радиоуправления (752.1 KiB, 4,695 hits)
Книга Владимира Днищенко для конструкторов аппаратуры радиоуправления:
Дистанционное управление моделями (3.2 MiB, 7,180 hits)
Радиоуправляемые модели – Электронные игрушки – Схемы для начинающих
Для радиоуправления различными моделями и игрушками может быть использована аппаратура дискретного и пропорционального действия. Основное отличие аппаратуры пропорционального действия от дискретной состоит в том, что она позволяет по командам оператора отклонять рули модели на любой требуемый угол и плавно изменять скорость и направление ее движения, «Вперед» или «Назад». Постройка и налаживание аппаратуры пропорционального действия достаточно сложны и . не всегда под силу начинающему радиолюбителю. Хотя аппаратура дискретного действия и имеет ограниченные возможности, но, применяя специальные технические решения, можно их расшить. Поэтому далее рассмотрим однокомандную аппаратуру управления, пригодную для колесных, летающих и плавающих моделей.
Передатчик радиоуправляемой модели.
Для управления моделями в радиусе 500 м, как показывает опыт, достаточно иметь передатчик с выходной мощностью около 100 мВт. Передатчики радиоуправляемых моделей, как правило, работают в диапазоне 10 м. Однокомандное управление моделью осуществляется следующим образом. При подаче команды управления, передатчик излучает высокочастотные электромагнитные колебания, другими словами, генерирует одну несущую частоту Приемник, который находится на модели, принимает сигнал, посланный передатчиком, в результате чего срабатывает исполнительный механизм. В итоге модель, подчинясь команде, меняет направление движения или осуществляет одно какое-нибудь заранее заложенное в конструкцию модели указание. Используя однокомандную модель управления, можно заставить модель осуществлять достаточно сложные движения. Схема однокомандного передатчика представлена на рис. 22.4. Передатчик включает задающий генератор колебаний высокой частоты и модулятор. Задающий генератор собран на транзисторе VT1, по схеме емкостной трехточки. Контур L2..C2 передатчика настроен на частоту 27,12 МГц, которая отведена Госсвязьнадзором электросвязи для радиоуправления моделями. Режим работы генератора по постоянному току определяется подбором величины сопротивления резистора R1. Созданные генератором высокочастотные колебания излучаются в пространство антенной, подключенной к контуру через согласующую катушку индуктивности L1. Модулятор выполнен на двух транзисторах VT1, VT2 и представляет собой симметричный мультивибратор. Модулируемое напряжение снимается с коллекторной нагрузки R4 транзистора VT2 и подается в общую цепь питания транзистора VT1 высокочастотного генератора, что обеспечивает 100% модуляцию. Управляется передатчик кнопкой SB1, включенной в общую цепь питания. Задающий генератор работает не непрерывно, а только при нажатой кнопке SB1, когда появляются импульсы тока, вырабатываемые мультивибрато-
Рис. 22.4. Принципиальная схема передатчика радиоуправляемой модели
ром. Посылка высокочастотных колебаний, созданных задающим генератором, в антенну происходит отдельными порциями, частота следования которых соответствует частоте импульсов модулятора.
В передатчике использованы транзисторы с коэффициентом передачи тока базы не менее 60. Резисторы типа МЛТ-0,125, конденсаторы—К10-7, КМ-6. Согласующая антенная катушка L1 имеет 12 витков ПЭВ-1 0,4 и намотана на унифицированном каркасе от карманного приемника с подстроечным ферритовым сердечником марки 100НН диаметром 2,8 мм. Катушка L2 бескаркасная и содержат 16 витков провода ПЭВ-1 0,8 намотанных на оправке диматром 10 мм. В качестве кнопки управления можно использовать микропереключатель типа МП-7. Детали передатчика монтируют на печатной плате из фольгированного стеклотекстолита. Антенна передатчика представляет собой отрезок стальной упругой проволоки 0 1 …2 мм и длиной около 60 см, которая подключается прямо к гнезду XI, расположенному на печатной плате. Все детали передатчика должны быть заключены в алюминиевый корпус. На передней панели корпуса располагается кнопка управления. В месте прохождения антенны через стенку корпуса к гнезду XI должен быть установлен пластмассовый изолятор, чтобы предотвратить касание антенны корпуса.
При заведомо исправных деталях и правильном монтаже передатчик не требует особой наладки. Необходимо только убедиться в его работоспособности и, изменяя индуктивность катушки L1, добиться максимальной мощности передатчика. Для проверки работы мультивибратора, надо включить высокоомные наушники между коллектором VT2 и плюсом источника питания. При замыкании кнопки SB1 в наушниках должен прослушиваться звук низкого тона, соответствующий частоте мультивибратора. Для проверки работоспособности генератора ВЧ необходимо собрать волномер по схеме рис. 22.5. Схема представляет собой простой детекторный приемник, в котором катушка L1 намотана проводом ПЭВ-1 1 …1,2 и содержит 10 витков с отводом от 3 витка. Катушка намотана с шагом 4 мм на пластмассовом каркасе 0 25 мм. В качестве индикатора используется вольтметр постоянного тока с относительным входным сопротивлением
Рис. 22.5. Принципиальная схема волномера для настройки передатчика
10 кОм/В или микроамперметр на ток 50…100 мкА. Волномер собирают на небольшой пластине из фольгированного стеклотекстолита толщиной 1,5 мм. Включив передатчик, располагают от него на расстоянии 50…60 см волномер. При исправном генераторе ВЧ, стрелка волномера отклоняется на некоторый угол от нулевой отметки. Настраивая генератор ВЧ на частоту 27,12 МГц, сдвигая и раздвигая витки катушки L2, добиваются максимального отклонения стрелки вольтметра. Максимальную мощность высокочастотных колебаний, излучаемых антенной, получают вращением сердечника катушки L1. Настройка передатчика считается оконченной, если вольтметр волномера на расстоянии 1 …1,2 м от передатчика показывает напряжение не менее 0,05 В.
Приемник радиоуправляемой модели.
Для управления моделью радиолюбители довольно часто используют приемники, построенные по схеме сверхрегенератора. Это связано с тем, что сверхрегенеративный приемник, имея простую конструкцию, обладает очень высокой чувствительностью, порядка 10…20 мкВ. Схема сверхрегенеративного приемника для модели приведена на рис. 22.6. Приемник собран на трех транзисторах и питается от батареи типа «Крона» или другого источника напряжением 9В. Первый каскад приемника представляет собой сверхрегенеративный детектор с самогашением, выполненный на транзисторе VT1. Если на антенну не поступает сигнал, то этот каскад генерирует импульсы высокочастотных колебаний, следующих с частотой 60… 100 кГц. Это и есть частота гашения, которая задается конденсатором С6 и резистором R3. Усиление вы-
Рис. 22.6. Принципиальная схема сверхрегенеративного приемника радиоуправляемой модели
деленного командного сигнала сверхрегенеративным детектором приемника происходит следующим образом. Транзистор VT1 включен по схеме с общей базой, и его коллекторный ток пульсирует с частотой гашения. При отсутствии на входе приемника сигнала, эти импульсы детектируются и создают на резисторе R3 некоторое напряжение. В момент поступления сигнала на приемник продолжительность отдельных импульсов возрастает, что приводит к увеличению напряжения на резисторе R3. Приемник имеет один входной контур LI, C4, который с помощью сердечника катушки L1 настраивается на частоту передатчика. Связь контура с антенной — емкостная. Принятый приемником сигнал управления выделяется на резисторе R4. Этот сигнал в 10…30 раз меньше напряжения частоты гашения. Для подавления мешающего напряжения с частотой гашения между сверхрегенеративным детектором и усилителем напряжения включен фильтр L3, С7. При этом на выходе фильтра напряжение частоты гашения в 5…10 раз меньше амплитуды полезного сигнала. Продетектированный сигнал через разделительный конденсатор С8 подается на базу транзистора VT2, представляющего собой каскад усиления низкой частоты, а далее на электронное реле, собранное на транзисторе VT3 и диодах VD1 ,VD2. Усиленный транзистором VT3 сигнал выпрямляется диодами VD1 и VD2. Выпрямленный ток (отрицательной полярности) поступает на базу транзистора VT3. При появлении тока на входе электронного реле, коллекторный ток транзистора увеличивается и срабатывает реле К1. В качестве антенны приемника можно использовать штырь длиной 70…100 см. Максимальная чувствительность сверхрегенеративного приемника устанавливается подбором сопротивления резистора R1.
Монтаж приемника выполняют печатным способом на плате из фольгированного стеклотекстолита толщиной 1,5 мм и размерами 100×65 мм. В приемнике используются резисторы и конденсаторы тех же типов, что и в передатчике. Катушка контура сверхрегенератора L1 имеет 8 витков провода ПЭЛШО 0,35, намотанных виток к витку на полистироловом каркасе 0 6,5 мм, с подстроечным ферри-товым сердечником марки 100НН диаметром 2,7 мм и длиной 8 мм. Дроссели имеют индуктивность: L2 — 8 мкГн, a L3 — 0,07…0,1 мкГн. Электромагнитное реле К1 типа РЭС-6 с обмоткой сопротивлением 200 Ом. Настройку приемника начинают с сверхрегенеративного каскада. Подключают высокоомные наушники параллельно конденсатору С7 и включают питание. Появившийся в наушниках шум свидетельствует об исправной работе сверхрегенеративного детектора. Изменением сопротивления резистора R1 добиваются максимального шума в наушниках. Каскад усиления напряжения на транзисторе VT2 и электронное реле особой наладки не требуют. Подбором сопротивления резистора R7 добиваются чувствительности приемника порядка 20 мкВ. Окончательная настройка приемника производится совместно с передатчиком, Если в приемнике, паралельно oбмотке peлe K1 подключить наушники и включить передатчик, то в наушниках должен прослушиваться громкий шум. Настройка приемника на частоту передатчика приводит к пропаданию шума в наушниках и срабатыванию реле.
“Поехали кататься!” или машинка на радиоуправлении
РадиоКот >Схемы >Цифровые устройства >Игрушки >“Поехали кататься!” или машинка на радиоуправлении
Дорогой радиокот! Поздравляю тебя с Днём Рождения! Желаю тебе всего самого наилучшего! Безо всяких преувеличений, яобожаю этот сайт! Здесь я научился очень многому, даже первую схемку бегущих огней я нашёл и собрал с этого сайта.
И вот, чуть чуть набравшись мозгов (совсем чуть чуть), я решил тебе преподнести небольшой подарок… Вот он:
Здорово выглядит, неправда ли? Передвигается сие чудо великой инженерной мысли по принципу танка. На ней можно мышей катать, хозяина дразнить, подкатить к какой-нибудь кошечке) Ну да ладно! Хватит юморить… Перейдём от слов к делу!
Всё началось пару лет тому назад, занимался я в радиокружке и захотелось мне сконструировать машинку, только на ИК-управлении. Вот только получилось слишком узконаправленное управление. Пришлось гуглить(
Лазил я значит по интернету, лакомился рыбкой, запивал молчком и наткнулся на очень интересные радиомодули. Их наверное видел каждый из вас:
Очень уж цена вкусной показалась (на тот момент комплект стоил 63 рубля).
Технические характеристики передатчика
1. Напряжение питания – от 3,6 до 15 В;
2. Ток потребления – 10 мА;
3. Тип модуляции – амплитудная;
4. Рабочая частота – 315 МГц;
5. Мощность – 10 мВт;
6. Максимальная скорость передачи данных – 4 кбит/с;
Технические характеристики приёмника:
1. Напряжение питания – 5 В;
2. Ток потребления – 4 мА;
3. Рабочая частота, соответственно – 315 МГц;
4. Чувствительность – 105 Дб;
Данный Передатчик работает по принципу амплитудной манипуляции. Что же это такое? Амплитудная манипуляция – это изменение сигнала, при котором скачкообразно меняется амплитуда несущего колебания. В отсутствии какого-либо сигнала или наличии постоянной составляющей нуля или единицы на входе передатчика, происходит срыв генерации несущей частоты.
Следовательно, необходимо передавать данные последовательностью нулей и едениц, то есть пакетами.
После долгих мучений экспериментов родились следующие схемы:
Работает на удивление просто: При нажатии соответствующий кнопки генерируется команда, которая передаётся по радиоканалу. Так как это “китайское чудо” работает минимум от 3,6 В, а литиевый аккумулятор имеет рабочее напряжение в диапазоне от 4,2 В до 3 В, то необходим повышающий импульсный стабилизатор. Он посторен на микросхеме max856. Так же нельзя забывать о том, что минимальное напряжение на банки литиевого аккумулятора должно быть не менее 3 В. На этот случай использован компаратор микроконтроллера и обратная связь на основе подстроечного резистора R6. В случае, если напряжение достигнет 3 В, микроконтроллер начнёт мигать красным светодиодом и прекратит передачу команд.
Настройка заключается в подборе определённого порога срабатывания компаратора. Она делается следующим образом: На входе повышающего импульсного стабилизатора выставляется напряжение в 3 В, затем необходимо так подобрать положение ползунка подстроечного резистора, чтобы замигал красный светодиод, а при увеличении напряжения на входе повышающего импульсного стабилизатора загорался зелёный светодиод.
Схема так же работает очень просто. Управление двигателями осуществляется с помощью мостовой схемы на полевых транзисторах. Самоиндукционные выбросы подавляются внутренними диодами полевых транзисторов, а так же цепочками резисторов и конденсаторов. Так же для защиты от самоиндукционных выбросов цифровой части в схеме реализовано аналоговое и цифровое питание. В качестве источника питания была использована батарея из двух литевых аккумуляторов. В качестве стабилизатора питания была выбрана микросхема LM2940 с низким падением напряжения. Выбрана именно она, а не обычная КРЕНка, не с проста. Дело в том, что рабочее напряжение на двух литиевых аккумуляторах составляет 7,4 В, а падение напряжение на КРЕНке составляет 2,5 В, таким образом рабочее напряжение составило бы 4,7 В… Дальше меньше( А падение напряжение на LM2940 составляет 0,5 В, что не может не радовать! При движении машинки в прямом направлении и при поворотах светятся белые светодиоды спереди, а при движении в обратном направлении горят жёлтые светодиоды сзади. Красные светодиоды сзади горят постоянно. Да! А вы как хотели? Это же “автомобиль”, а в нём все должно быть по-настоящему!
Настройка аналогична, что и с передатчиком. Только на вход подаём не 3 В, а 6 В)
Для кодирования дынных был выбран манчестерский код, так как он является самосинхронизирующимся, то есть не требует специальной кодировки синхроимпульса. При манчестерском кодировании каждый такт делится на две части. Информация кодируется перепадами потенциала в середине каждого такта, где логическому нулю соответствует переход в центре бита из нуля в единицу, а логическая единица соответствует переходу в центре бита из единицы в ноль. Обязательное наличие перехода в центре бита позволяет легко выделить синхросигнал. Допустимое расхождение частот передачи – до 25 % . Это означает,что код Манчестер самый устойчивый к рассинхронизации, он самосинхронизуется в каждом бите передаваемой информации.
Всё выглядит довольно просто, но у данного способа кодировки есть пара недостатков:
1. При последовательной кодировке одноименных битов информации происходит удвоение частоты, что явно видно на рисунке выше;
2. При декодировке (в виду отсутствия синхроимпульса) може произойти потеря первого бита данных, что приведёт к инверсии всего пакета.
Мяу! Не совсем понятно, не правда ли? Объясню более наглядно.
Рассмотрим пример передачи 1 байта данных. Возьмём, например байт 0х33. Перекодируем, согласно данному закону. Этот сигнал поступает на вход передатчика.
Возможны два варианта принятого сигнала. Рассмотрим первый, когда сигнал пришёл без потери первого бита. В контроллере програмно реализован детектор изменений входного сигнала. В тот момент, когда происходит переход из 1 в 0 или из 0 в 1 на выходе этого детектора на короткое время устанавливается логическая единица. Так же в контроллере реализован программный счётчик, который считает от 0 до 15. Далее идёт программное сравнение значения счётчика с 8 и вычленение каждого второго значения. С полученным сигналом и с принятыми данными происходит операция логическое “И”. Результатом этой операции является сигнал, принятый с передатчика.
Рассмотрим случай, когда сигнал пришёл с потерей первой половины бита. По принципу выделения байта данных мы видим, что полученый сигнал является инверсным.
Так как же нам быть? Как же нам расшифровать сигнал правильно? Для того, чтобы расшифровать сигнал правильно необходимо реалилизовать пакет, состоящий из 6 байт. Первый байт может быть любым. Он необходим для выхода передатчика на рабочую частоту. Договариваемся сами с собой, что следующие 2 байта – байты синхронизации и будут численно равны 0хАА и 0х55. И, соответственно 3 байта данных. Изначально, контроллер приёмника сравнит принятые 2 байта синхронизации. Если байты синхронизации не совпали – это свидетельствует о том, что возможно появилась помеха. В момент приёма данных могут возникать ошибки. Для того, чтобы этого избежать необходимо передавать, как минимум 3 байта данных. В этом случае мы можем выявить ошибку и расшифровать принятый байт данных.
Сбрасываем все, кроме SPIEN)
Сам “Автомомбиль”:
Внутренности передатчика:
Файлы:
Архив RAR
Все вопросы в Форум.
Как вам эта статья? | Заработало ли это устройство у вас? |
Эти статьи вам тоже могут пригодиться:
RF Автомобиль с дистанционным управлением: 6 ступеней (с изображениями)
Все делают ошибки, и важно сохранять спокойствие и отлаживать вашу схему / проводку.
Пайка
- Залудите жало паяльника небольшим количеством припоя. Протрите его влажной губкой, а затем снова добавьте небольшое количество припоя – это поможет теплу быстро течь по стыку.
- Убедитесь, что все паяемые поверхности чистые и обезжирены.
- Нагрейте вывод компонента и контактную площадку кончиком паяльника.
- Медленно нанесите припой на соединение и дайте припою стечь по контактной площадке. Идеальная форма хорошего паяного соединения должна быть похожа на вулкан.
- Снимите паяльник после нанесения припоя. Если оставить утюг на подстилке слишком долго, подушка может упасть с печатной платы. Флюс в припое сгорит, вызывая окисление припоя. Поэтому всегда дайте припою немного остыть, прежде чем добавлять еще, обычно пары секунд достаточно.
- Когда паяное соединение приобретет идеальную форму, дайте ему остыть и затвердеть.
- Обрежьте излишки свинца диагональными ножами.
- Для проверки паяного соединения используйте функцию проверки целостности на мультиметре. Соедините провода вместе и убедитесь, что мультиметр издает звуковой сигнал.
- Коснитесь выводов в двух точках на противоположных сторонах паяного соединения. Мультиметр издаст звуковой сигнал, если будет обнаружено обрыв цепи.
Источник питания
- Убедитесь, что красный вывод зажима / держателя аккумулятора подключен к положительной клемме печатной платы, а черный провод – к отрицательной клемме.
- Используйте функцию проверки целостности цепи на мультиметре и проверьте положительную и отрицательную клеммы. Если он издает звуковой сигнал, значит в цепи короткое замыкание, которое также могло повредить компоненты.
- Никогда не подключайте аккумулятор, пока не проведете проверку целостности цепи.
Светодиод
Убедитесь, что полярность светодиода правильная. Чем длиннее вывод – это положительный конец, а тем короче – отрицательный. Кроме того, контакт на плоской стороне светодиода является отрицательным.
Диод и электролитический конденсатор
Убедитесь, что полярность диода и конденсатора правильная. На диоде / конденсаторе будет отмечена линия. Это указывает на отрицательную сторону.
Подключение
- Проследите цепь, убедившись, что каждый компонент подключен правильно.
- Все VCC должны быть соединены вместе. Все GND соединены вместе.
- Используйте мультиметр и измерьте напряжение на контактах.Все контакты, подключенные к VCC, должны иметь напряжение аккумулятора, а GND – 0.
- Попросите кого-нибудь еще проверить вашу схему, вы можете не увидеть ее, но они могут.
Схема автомобиля на радиоуправлении
Схема автомобиля на радиоуправленииОбзор проекта
Ниже приведена блок-схема высокого уровня, показывающая путь данных через систему.
Контроллер ввода с джойстиком
Эти схемы были подключены к джойстику, чтобы микроконтроллер мог читать рулевое управление и ввод скорости от него.Потенциометры R3 и R4 являются частью джойстик и изменяйте значения при перемещении джойстика. Текущие зеркала поддерживать постоянный ток через потенциометры, чтобы АЦП могли оцифровывать потенциал через них линейным образом.
Рулевое управление
Рулевое управление управляется сервоприводом, который питается от основной батареи и контролируется широтно-импульсной модуляцией.Микроконтроллер подает импульс серво около 60 раз в секунду. Импульсы продолжительностью 1 мс поворачивают колеса до упора. влево, и импульсы в течение 2 мс поворачивают колеса до упора вправо.
Регулятор скорости
Схема управления скоростью – это, по сути, большой двухтактный усилитель, которым можно управлять. отключены от контактов порта микроконтроллера, но могут управлять током, достаточным для питания двигателя. Логические вентили в начале схемы гарантируют, что только одна сторона Двухтактная конфигурация активна одновременно.Это защищает схему от программиста. ошибка и от противоречивых сигналов от микроконтроллера. Силовые БЮЦ управляются комбинацией транзисторов меньшего размера и ограничителя тока. резисторы. Диоды на силовых BJT защищают их от обратной ЭДС, когда мотор выключен.
Как работают радиоуправляемые игрушки
Радиоуправляемые или дистанционно управляемые игрушки, обычно называемые радиоуправляемыми игрушками, имеют автономное питание и ими можно управлять на расстоянии с помощью пульта дистанционного управления, который работает с радиоволнами.
1. Когда мы нажимаем кнопку управления, передатчик посылает по воздуху определенное количество электрических импульсов, соответствующих этому действию. Передатчик имеет собственный источник питания, обычно в виде 9-вольтовой батареи. Без батареи передатчик не сможет посылать радиоволны на приемник.
2. Как только радиоуправляемая игрушка получает радиоволны, моторы оживают, вызывая определенное действие. Источник питания передает мощность на все рабочие части, включая двигатель.Передатчик обеспечивает управление с помощью радиоволн, а приемник активирует двигатели. Когда мы нажимаем кнопку на передатчике, чтобы заставить радиоуправляемую игрушку двигаться вперед или назад, соприкасается пара электрических контактов. Приемник идентифицирует сигналы, отправляет их в схему.3. Печатная плата преобразует количество электрических импульсов (сигналов) в действие. Полнофункциональные контроллеры имеют шесть элементов управления, которые работают по следующей последовательности импульсов:
1. Вперед: 16 импульсов
2. Назад: 40 импульсов
3.Вперед влево: 28 импульсов
4. Вперед вправо: 34 импульса
5. Обратное влево: 52 импульса
6. Назад вправо: 46 импульсов
| Детали радиоуправляемой игрушки Передатчик: Пульт дистанционного управления содержит радиопередатчик, который работает на определенной частоте, на прием которой рассчитан приемник. Приемник: Приемник закреплен в автомобиле и постоянно принимает сигналы от передатчика. Когда передача распознается, она преобразует количество электрических импульсов в действие.Источник питания: всем автомобилям с дистанционным управлением требуется источник питания. Аккумуляторные батареи питают небольшие электродвигатели. В качестве альтернативы некоторые используют небольшие двигатели внутреннего сгорания. Мотор и печатная плата: Мотор отвечает за вращательные движения игрушки, в то время как печатная плата работает как пул, через который все команды передаются определенным частям. |
Planet Analog – Дизайн радиоуправляемого автомобиля
Недавно купил сыну свою первую радиоуправляемую машину.Игра с ним напомнила мне, как в детстве я любил получать радиоуправляемые игрушки, чтобы разрывать их, чтобы понять, как они работают. Меня очаровала магия электроники. Именно это раннее любопытство помогло мне сделать карьеру в электронике.
К сожалению, я так и не разобрался в деталях того, как он работает. Когда я начал серьезно заниматься электроникой, меня заинтересовали другие области. Поэтому я решил разобрать новую машину сына, чтобы наконец посмотреть, как она работает.
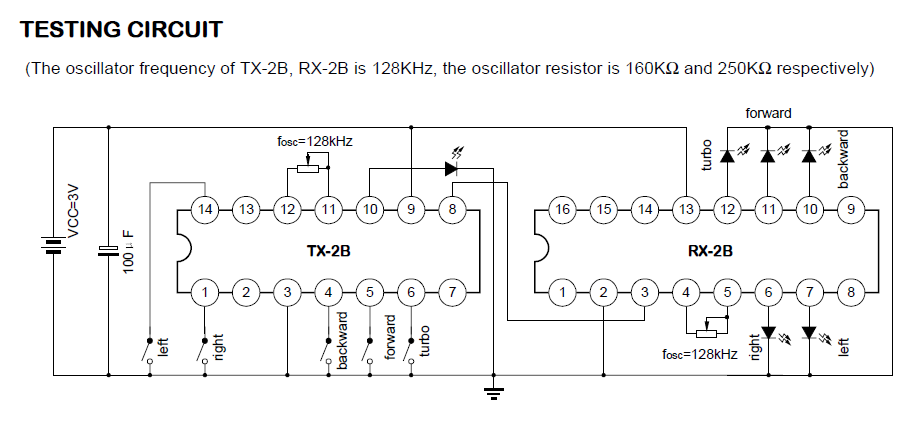
В основе конструкции лежит популярный комбинированный чип передатчика / приемника, специально разработанный для радиоуправляемых автомобилей и получивший название TX-2B / RX-2B. Эта пара микросхем выполняет кодирование и декодирование данных. Все остальные функции, включая передатчик и приемник, выполняются дискретными транзисторными схемами.
Радиоуправляемая машина моего сына использует несущую частоту 27 МГц. Эта частота известна как промышленный, научный и медицинский (ISM) диапазон. В мире существует множество диапазонов ISM, которые, вопреки названию, являются радиочастотными диапазонами, используемыми в большинстве потребительских товаров.Вероятно, самый загруженный диапазон ISM для потребительских приложений – это 2,4 ГГц, который используется беспроводными телефонами, Bluetooth, Wi-Fi и даже вашей микроволновой печью. (Дополнительные сведения о диапазонах ISM см. В моем блоге: Как выбрать частоту беспроводного устройства.)
Конструкция передатчика
Давайте начнем с рассмотрения схемы передатчика, расположенной в ручном контроллере. Блок-схема TX-2B показана ниже на рисунке 1. TX-2B обрабатывает кодирование для пяти различных функций (вперед, назад, влево, вправо и турбо).При нажатии кнопки цифровой код, представляющий одну из этих функций, последовательно выводится на контакт 8. Частота этого сигнала данных составляет около 1 кГц.
Рисунок 1
Внутренняя блок-схема микросхемы кодера передачи TX-2B
Теперь давайте взглянем на полную схему передатчика на Рисунке 2 (полученную из таблицы данных TX-2B).
Рисунок 2
Схема цепи передатчика
Для питания TX-2B создан простой стабилитрон на 3 В с использованием D1 и R5.R osc устанавливает частоту внутреннего генератора TX-2B равной 128 кГц. Несущий сигнал 27 МГц генерируется схемой генератора, состоящей из X1, Q1 и L1. R1 устанавливает ток смещения для Q1, а R2 обеспечивает защиту по пределу тока. Сигнал кодированных данных на контакте 8 TX-2B затем соединяется с сигналом несущей через C1. Связанный сигнал показан ниже на Рисунке 3.
Рисунок 3
Сигнал данных в сочетании с сигналом 27 МГц
Этот сигнал затем подается в каскад усиления переменного тока, сформированный Q2 и L2.Из-за большой величины сигнала данных этот каскад усиления активен только при высоком уровне линии передачи данных. Когда линия данных высока, сигнал несущей 27 МГц усиливается, но когда линия данных низкая, каскад усиления Q2 отключается. Результирующая форма волны на коллекторе Q2 – это просто усиленный несущий сигнал, включаемый / выключаемый сигналом данных.
Этот метод радиосвязи называется непрерывным (CW) радио. CW – простейший вид радиопередачи. Фактически, это метод радиосвязи, используемый телеграфными машинами для передачи кода Морзе.Непрерывный сигнал на коллекторе Q2 показан ниже на рисунке 4.
Рисунок 4
Выход непрерывного сигнала на антенну
Сигнал CW передается по переменному току через C2, чтобы удалить оставшуюся составляющую постоянного тока. Пи-сеть, состоящая из L3, C3 и C4, а также L4, используется для согласования импеданса с антенной. Правильное согласование импеданса имеет решающее значение для оптимизации эффективности антенны.
Конструкция приемника
Схема приемника, расположенная в автомобиле, немного сложнее схемы передатчика.Отчасти это связано с тем, что он также включает H-образные мосты для привода двух двигателей (тяги и рулевого управления). На рисунке 5 ниже показана блок-схема RX-2B.
Рисунок 5
Выход непрерывного сигнала от усилителя на антенну
Закодированный сигнал данных с частотой 1 кГц вводится на контакт 3, затем внутренне усиливается и декодируется. Как только соответствующая функция определена из декодированного сигнала, соответствующий выходной контакт активируется для прямого, обратного, правого, левого или турбо.Полная схема цепи приемника (из таблицы данных RX-2B) показана ниже на рисунке 6.
Рисунок 6
Схема приемной цепи с Н-мостовым приводом двигателя
Приемник – это схема, построенная на Q1. Этот тип приемника известен как регенеративный приемник, потому что он использует положительную обратную связь. Настроенная LC-цепь, состоящая из L2 и C3, обеспечивает положительную обратную связь, но только на настроенной частоте (27 МГц). Это означает, что положительная обратная связь усиливает только предполагаемый сигнал.Одним из недостатков этого типа приемника является то, что L2 должен быть специально скручен для точной настройки приемника.
Выходной сигнал схемы приемника поступает на вывод 14 RX-2B. Теперь этот сигнал фильтруется для удаления несущей и проходит через два внутренних инвертора. К тому времени, когда сигнал поступает на входной контакт RX-2B (контакт 3), он уже отфильтрован и очищен настолько, что остается только сигнал данных 1 кГц. Как и в случае с TX-2B, для питания RX-2B используется стабилитрон 3 В.R osc снова устанавливает частоту внутреннего генератора на 128 кГц.
Две стандартные Н-мостовые схемы используются для пропульсивного двигателя и двигателя рулевого управления. H-мост позволяет управлять направлением двигателя, переключая направление тока через мост и двигатель. В схеме, показанной в таблице данных RX-2B, было несколько ошибок, которые были исправлены на схеме, показанной выше. Турбо-функция увеличивает ток через пропульсивный двигатель (через Q3), но только когда выбрано прямое направление.
Конструкция антенны
Использование более низкой несущей частоты, например 27 МГц, имеет несколько преимуществ. Это позволяет использовать более медленные и недорогие устройства для радиочастотных секций. Во-вторых, дизайн не так чувствителен к эффектам разводки печатной платы. Наконец, при той же выходной мощности несущая с более низкой частотой будет предлагать больший диапазон по сравнению с более высокими частотами. Большим недостатком является то, что для более низких несущих частот требуются антенны большего размера.
Радиоуправляемые автомобили используют монопольную антенну (в отличие от дипольной антенны – как уши кролика).Монопольная антенна имитирует дипольную антенну за счет использования отражающих свойств плоскости заземления, в данном случае самой Земли. Для максимальной эффективности антенна должна быть спроектирована так, чтобы резонировать на желаемой несущей частоте. Для этого антенна должна быть 1/4 длины волны передаваемых радиоволн. Длину волны можно рассчитать по формуле:
- Длина волны = Скорость света / Частота
Скорость света в вакууме составляет 300 x 10 6 м / с, но в металле она примерно на 5% медленнее.Итак, предполагая антенну с длиной волны 1/4 и несущую 27 МГц, длина антенны должна быть:
- Длина антенны = (0,95 x 0,25 x 300 x 10 6 ) / (27 x 10 6 ) = 2,6 метра
Однако 2,6 метра – это непрактично длинная антенна для многих приложений, таких как небольшая игрушечная машинка. . Либо спиральная антенна должна использоваться для получения требуемой длины, либо можно использовать нагрузочную катушку, чтобы антенна резонировала на меньшей длине. В случае с автомобилем моего сына ни один из этих методов не используется.Вместо этого используется телескопическая антенна длиной всего около 15 дюймов. Низкая эффективность из-за использования слишком короткой антенны резко снижает дальность действия. Но для игрушки ближнего действия уменьшенная дальность приемлема. Экономия затрат при использовании низкой частоты перевешивает сокращение диапазона для некоторых недорогих продуктов.
Я должен сказать, что мне приятно, что я наконец достиг своей детской цели – разобраться в деталях того, как работает радиоуправляемая игрушка. Я знаю, что многие инженеры рождены со страстью к пониманию того, как все работает, поэтому, пожалуйста, поделитесь с читателями, какие игрушки вы рвали на части в детстве, комментируя ниже.
Страница не найдена | MIT
Перейти к содержанию ↓- Образование
- Исследовать
- Инновации
- Прием + помощь
- Студенческая жизнь
- Новости
- Выпускников
- О MIT
- Подробнее ↓
- Прием + помощь
- Студенческая жизнь
- Новости
- Выпускников
- О MIT
Попробуйте поискать что-нибудь еще! Что вы ищете? Увидеть больше результатов
Предложения или отзывы?
Как построить дома автомобиль с дистанционным управлением
Пульт дистанционного управления Автомобили, также известные как радиоуправляемые автомобили, – это то, что хотел бы построить каждый любитель электроники.Но большинство из них не знали, с чего начать и как его построить, некоторые даже были обмануты его сложной внешностью. Эта статья направлена на то, чтобы помочь любителям построить свой собственный самодельный радиоуправляемый автомобиль с минимальным количеством компонентов.
СТБ-СХЕМА:
Чтобы построить радиоуправляемую машину, нам нужно убедиться, что эти блоки доступны. Вышеупомянутые блоки разделены на два раздела Remote и Car для понимания. Начиная с клавиатуры, которая контролирует движение автомобиля, тогда как кодировщик и декодеры предназначены для кодирования и декодирования сигналов движения для безопасной передачи.Также передатчик отправляет сигналы движения через беспроводную среду, а приемник выбирает сигналы для пункта назначения.
СХЕМА ПУЛЬТА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ:
Вышеупомянутая схема дистанционного управления состоит из трех важных компонентов: клавиатуры, энкодера IC HT12E и модуля RF-передатчика RF433.
КЛАВИАТУРА: Клавиатура для нашего пульта дистанционного управления состоит из четырех отдельных кнопок, которые подключены к контактам данных AD0 – AD3 IC кодировщика.Когда эти кнопки нажаты, он передает сигналы движения на энкодер,
.ENCODER HT12E: Этот кодировщик служит для кодирования сигналов движения, подаваемых отдельными кнопками. На выводах данных AD0 – AD3 активен низкий уровень, поэтому нажатие кнопки замыкает цепь, и на эти контакты подается сигнал логической 1 или высокий уровень. Он также содержит адресные контакты от A0 до A7, которые позволяют нам опробовать различные комбинации адресов для защищенной передачи данных, но убедитесь, что вы используете ту же комбинацию адресов на принимающей стороне (декодере).В приведенной выше схеме мы не пробовали никаких комбинаций адресов, поэтому все контакты заземлены. Вывод Dout выдает закодированные выходные данные. Узнайте больше о работе кодировщика HT12E.
RF433 TX: Это простой модуль RF433 TX, работающий на частоте 433 МГц. Закодированные данные с энкодера подаются на вывод DIN TX, и к его 4-му выводу прикреплена простая антенна.
ЧАСТОТА ОСЦИЛЛЯТОРА: Частота генератора HT12E составляет 3,25 кГц (см. График зависимости частоты колебаний от напряжения питания в таблице данных).Эта частота фиксируется резистором R1 (1,1 МОм). Изменение этого значения резистора изменит выходную частоту.
СХЕМА ДИСТАНЦИОННОГО АВТОМОБИЛЯ:
RF433 RX: Это простой модуль RF433 RX, работающий на частоте 433 МГц. Принятые закодированные сигналы данных принимаются через антенну, а сигнал поступает с вывода DATA для подачи на декодер.
HT12D ДЕКОДЕР: Закодированные сигналы от модуля RX подаются на вывод DIN декодера.Затем сигнал декодируется декодером, не забудьте использовать ту же комбинацию адресов, что и в кодировщике, если таковая имеется, в противном случае сигналы движения будут интерпретироваться неправильно. Декодер также состоит из вывода VT, который служит для идентификации, если установлено какое-либо соединение RF, к этому выводу был подключен светодиод для идентификации.
ЧАСТОТА КОЛЕБАНИЙ: Для успешного приема входящего сигнала и его декодирования частота колебаний HT12D должна в 50 раз превышать частоту колебаний энкодера.В нашем случае частота колебаний HT12E составляет 3,25 кГц, следовательно, частота колебаний нашего декодера должна быть 162,5 кГц. Установка значения R1 как 62K выполняет эту работу (см. График зависимости частоты колебаний от напряжения питания в таблице данных).
L293D: Эта микросхема служит двунаправленным драйвером двигателя. Совершенно невозможно управлять большими нагрузками, такими как двигатели, с помощью микросхемы декодера, поэтому для этой цели мы использовали специальную микросхему L293D. Узнайте больше о работе L293D.
МОТОРЫ: Два простых двигателя постоянного тока используются для движения радиоуправляемой машины.Двигатель для движения автомобиля вперед и назад, в то время как другой используется для поворота автомобиля влево и вправо.
МЕХАНИЗМ ДВИЖЕНИЯ АВТОМОБИЛЯ:
Мы закончили с пультом дистанционного управления и цепями, которые собираются разместить в машине. Теперь следующая важная вещь – обеспечить механизм для перемещения нашей радиоуправляемой машины вперед и назад. Закрепите шестерню на двигателе и на рельсе, соединяющем задние колеса. Закрепите двигатель рядом с шестерней в рельсе, чтобы при движении двигателя автомобиль двигался вперед.Точно так же, когда двигатель вращается в противоположном направлении, автомобиль должен двигаться назад.
РУЛЕВОЙ МЕХАНИЗМ АВТОМОБИЛЯ:
Рулевой механизм немного сложнее, чем механизм движения, поскольку требует немного механики. Есть несколько механизмов рулевого управления, используемых при постройке радиоуправляемых машин, но здесь я предпочитаю использовать «стойку и шестерню», чтобы направить машину в желаемом направлении.
Изображение предоставлено: www.offroaders.com
На анимации выше показана работа механизма рулевого управления с реечной передачей.Здесь ведущая шестерня будет прикреплена к нашему переднему двигателю, который отвечает за правое / левое рулевое управление. Поэтому, когда этот двигатель движется по часовой стрелке, автомобиль поворачивает налево и наоборот. Посмотрите, как работает эта передача в этом видео.
НЕОБХОДИМЫЕ ДЕТАЛИ:
- RF433 МГц TX и RX
- Кодировщик HT12E и декодер HT12D
- L293D – 1
- Моторы – 2
- Колеса – 4
- Резисторы – по требованию
- светодиод
Надеюсь, этот проект был для вас информативным.Ознакомьтесь с другими электронными проектами на нашем сайте. Если у вас есть отзывы или комментарии об этом проекте, оставьте их в разделе комментариев ниже.
Сделайте простую машину-робот на радиоуправлении (с дистанционным управлением)
Если вы студент-инженер, строящий вездеход, или любитель электроники, пытающийся произвести впечатление на людей своими навыками, создание радиоуправляемой машины-робота (беспроводной) намного лучше, чем проводной робот, за которым вам придется следовать за рулем.
Это не совсем робототехнический проект.По определению, робот – это то, что принимает решение на основе каких-то внешних параметров. Есть еще одна чертовщина, которую нужно сделать, прежде чем рассказывать людям «Я создаю роботов» , но, эй, вы должны с чего-то начать, верно?
ОбъективыМы будем обсуждать базовый «Ленд Ровер» ни с чем. Ну не совсем ничего, но ничего сложного. Как я упоминал ранее, это действительно простой проект, настолько простой, что в нем даже нет встроенного компьютера (микроконтроллера).
Акцент делается только на механической конструкции и некоторых основных схемах. Мы изучаем интерфейс имеющегося в продаже модуля РЧ-передатчика и приемника в сочетании с HT12E и HT12Dpair (кодировщик / декодер) для передачи данных по воздуху на двигатели в нашей машине-роботе.
Вещи, которые вам понадобятся:Большинство компонентов, которые мы будем использовать, очень распространены и их можно купить в местных магазинах электроники. Вот список всего оборудования, которое вам понадобится для этого проекта.
Что касается электроники, вам понадобятся следующие основные компоненты. Вам также могут понадобиться некоторые другие базовые компоненты, такие как резисторы и конденсаторы, но мы обсудим их, когда и когда мы их получим.
Кроме вышеперечисленных компонентов, вам понадобится базовый набор инструментов, паяльника и сопутствующих материалов.
Итак, приступим!
Рабочая логика машины-робота с дистанционным управлениемВот блок-схема, которая поможет вам понять логику работы машины-робота.Сначала мы рассмотрим основную идею радиоуправляемой машины и рабочую логику, которая задействована в машине. Есть два блока: передатчик (дистанционное управление) и приемник (роботизированная машина).
На стороне передатчика у вас есть переключатели для передачи цифровых входов на микросхему энкодера. Затем кодировщик кодирует эти данные и отправляет их в модуль RF-передатчика.
На стороне приемника у вас будет РЧ-приемник, который принимает закодированные данные и передает их декодеру.Декодер декодирует данные и отправляет их на интегральную схему драйвера двигателя для управления двигателями.
Общие сведения о таблицах данных
Следующий шаг – узнать, как получить доступ к таблицам данных для компонентов, которые вы используете. На самом деле это не так уж и важно, просто введите имя компонента в Google, и вы найдете ссылки на таблицу.
Техническое описание или спецификация – это документ PDFA, который предоставляется производителем, чтобы дать нам лучшее понимание того, как на самом деле ведет себя компонент.Самое сложное – найти то, что вы ищете в только что загруженном PDF-файле.
Чтение и понимание технических данных – это навык, которым должен овладеть любой энтузиаст электроники. Предлагаю вам прочитать статью Вы читаете даташит? Что искать и как их найти! чтобы научиться читать и понимать таблицы данных.
Итак, самое главное – потратить достаточно времени на таблицу. Вы можете быть почти на 100% уверены, что каждая минута была потрачена не зря.
Алгоритм дифференциального привода
Существует множество различных типов алгоритмов привода для управления роботизированными автомобилями.Одним из таких методов является метод дифференциального привода.
Я знаю, это звучит модно, но в этом нет ничего страшного. Мы будем использовать только одну пару двигателей для управления автомобилем. Посмотрите видео, чтобы узнать, как подключено оборудование. У нас будет только одно поворотное колесо помимо двух двигателей, и оно будет использоваться для придания механической устойчивости автомобилю-роботу.
Возникает очевидный вопрос, как машина изменит направление движения, если у нее всего два колеса. Вот тогда-то и появляется алгоритм дифференциального привода.Управление направлением достигается за счет вращения одного из колес в одном направлении, а другого – в другом. Следующая таблица может помочь вам лучше понять.
| Левый мотор | Правый мотор | Направление | |
|---|---|---|---|
| Передний | Передний | Передний | |
| Передний | Задний | Правый Передний | |
| Назад | Назад | Назад |
Как вы уже догадались, автомобиль будет двигаться вперед или назад, если обе пары двигателей работают в одном направлении, и влево или вправо, если они работают в разных направлениях.
Модуль РЧ передатчика и приемника
Вот как будут выглядеть модули РЧ передатчика и приемника. Существует множество производителей, поэтому не паникуйте, если ваши модули выглядят иначе. Даже частота, на которой они общаются, не должна быть проблемой, если и приемник, и передатчик имеют одну и ту же частоту. Все модули совместимы с контактами и площадками. Но есть некоторые модули с перевернутой нумерацией, например, первый вывод будет последним выводом, а второй вывод будет вторым после последнего и так далее.
Изготовление ВЧ-передатчика (пульт дистанционного управления)
Теперь о схеме передатчика, вы должны помнить, что это ваш пульт. Так что постарайтесь сделать его как можно более удобным (на случай, если вы его делаете). Поверьте, последнее, что вам нужно, это слишком большой / тяжелый пульт, чтобы носить его с собой. Сделайте хорошее замыкание для этой цепи.
Кодировщик HT12E – это 12-битные кодеры, то есть они имеют 8 бит адреса и 4 бита данных. Биты адреса можно оставить открытыми или установить низкий уровень. На схеме ниже вы увидите, что каждый из адресных контактов (от A0 до A7) подключен к переключателю.Таким образом, если переключатель включен, эта линия подключена к GND (VSS), в противном случае контакт остается плавающим.
TE (разрешение передачи) является активным низким входом для IC. Это разрешает передачу. Таким образом, когда переключатель, подключенный к выводу 14, нажат, 8 бит адреса вместе с 4 битами данных (от AD8 до AD11) последовательно кодируются и отправляются на вывод DOUT.
Для нашего приложения (радиоуправляемая роботизированная машина) мы подключим TE напрямую к GND, так как мы должны продолжать отправлять данные по мере их поступления в радиоуправляемую машину.
В отличие от схемы приемника, здесь не требуется мощная батарея. Вы можете запитать эту схему от батареи 9 В.
Нажмите на картинку, чтобы увеличить!
Создание схемы РЧ-приемника с драйвером двигателя
Это принципиальная схема приемника. Он обрабатывает радиочастотный прием, а также моторный привод.
Адресный вывод в декодере (HT12D) ведет себя так же, как и в кодировщике. Данные принимаются на вывод DIN от схемы РЧ-приемника, а затем эти данные проверяются 3 раза (согласно таблице данных данные передаются 3 раза и принимаются 3 раза, и только если все 3 раза данные совпадают, они декодируются) а затем декодируется, и ИС проверяет, совпадает ли соединение с адресным контактом кодера с разъемом декодера.Если конфигурация адреса декодера совпадает с конфигурацией в полученных данных (от кодера), данные декодируются и фиксируются на выводах данных (с D8 по D11).
Эти декодированные данные затем отправляются в виде сигналов управления на ИС драйвера двигателя. L293d – это драйвер двигателя с двойным Н-мостом, если коротко. Он используется для привода двигателя как в прямом, так и в обратном направлении. Прочтите об основах двигателей постоянного тока и их управлении скоростью, чтобы лучше понять эту концепцию.
Вывод VT (допустимая передача) используется для индикации наличия действительной передачи между кодером и декодером.Этот вывод можно оставить разомкнутым или, как показано на схеме ниже, для визуальной индикации можно использовать светодиод с последовательным сопротивлением.
Нажмите на картинку, чтобы увеличить!
PCB Artwork
Мне потребовалось некоторое время, чтобы создать небольшую компоновку печатной платы для двух вышеуказанных схем. Вы можете скачать исходный файл дизайна орла и печатных плат здесь. Я никогда не занимался схемотехникой как профессия. Это навык, который я приобрел где-то на бегу, и он довольно примитивен.Так что это может быть не лучший макет, но у меня он сработал. Я готов принять любую помощь в улучшении этого дизайна (напишите мне), чтобы помочь другим.
Обновление(апрель 2016 г.): я не смогу поддерживать этот дизайн, так как я потерял исходные файлы. Пожалуйста, используйте их только как ссылку на ваш собственный дизайн. И если у вас получится сделать хоть что-нибудь, чтобы поделиться, свяжитесь со мной, чтобы разместить здесь вашу работу.
Видео демонстрация
Это видео, которое я сделал, документируя весь процесс создания радиоуправляемой машины.Если вы прочитали все пункты, о которых я упоминал до сих пор, ничто из того, о чем я говорю в этом видео, не будет для вас новым. Я сделал это видео только для того, чтобы вы лучше понимали, что нужно сделать для создания радиоуправляемой машины-робота.
И, пожалуйста, извините за мои плохие навыки создания / редактирования видео. Я еще не освоил их.
Тестирование вашей схемы
С момента публикации этого поста читатели сталкивались с различными проблемами, пытаясь создать автомобиль-робот с дистанционным управлением.В большинстве случаев проблема, с которой они сталкивались, была в разделе RF Передача и прием. Он также попал в определенные категории, когда проблема не была в разделе RF.
Прочтите статью о том, как проверить ваш РЧ-передатчик и приемник в случае неисправности.
Я настоятельно рекомендую вам прочитать пост «Отладка схемы – Советы, приемы и методы», прежде чем пытаться создать свой собственный автомобиль с радиоуправляемым роботом. Если у вас все еще есть сомнения, оставьте свой комментарий в этой статье, и я сделаю все возможное, чтобы помочь вам.
А пока вы можете прочитать о некоторых более продвинутых роботах, которые есть в наших архивах робототехники. Для создания любого робота вы должны иметь достаточно хорошие знания в области встроенных систем, а также базовой электроники и механики.
Возможно, вы захотите проверить эти сообщения для своих будущих проектов !!
Вот и все, чтобы начать заниматься робототехникой (ну, это не совсем робототехника). Помимо этого, есть еще много чего узнать. Это должно было прояснить некоторые основы для новичков и подбодрить продвинутых читателей.Надеюсь вскоре увидеть вас с еще одной такой статьей.
