Схемы управления двигателями постоянного тока якоря неизменном напряжении питания
Страница 33 из 62
Ручной пуск производится при помощи реостатов, включаемых последовательно с якорем двигателя. Для пуска двигателей постоянного тока в приводах установок гидромеханизации этот способ не применяется. Схема управления при ручном пуске предельно проста и здесь не рассматривается.
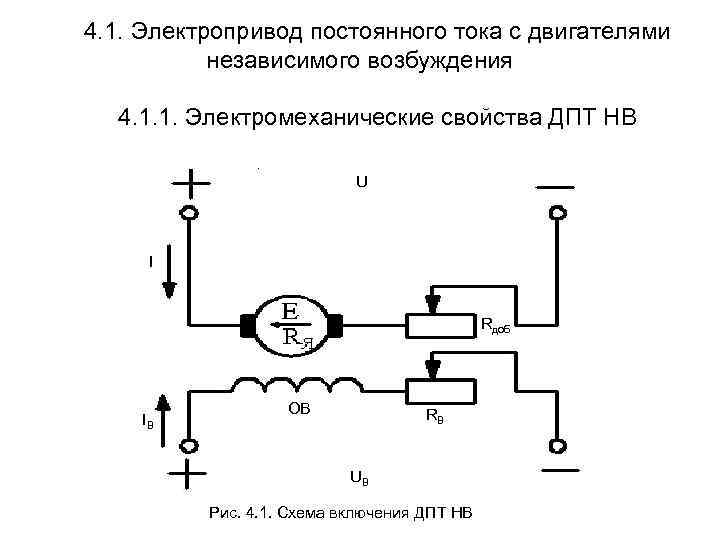
Рис. 9-2. Схема цепей якоря двигателя постоянного тока независимого возбуждения при управлении пуском в функции скорости.
Автоматический пуск осуществляется путем последовательного замыкания накоротко секций пускового сопротивления контакторами, называемыми контакторами ускорения. Эти замыкания осуществляются автоматически и могут выполняться в зависимости от одной из следующих величин: 1) скорости; 2) тока якоря; 3) пути прохождения движущимся звеном механизма, приводимого данным двигателем; 4) времени.
Вопросы пуска двигателей постоянного тока в гидромеханизации самостоятельного значения не имеют. Однако принципы автоматизированного пуска используются в качестве средства контроля при управлении регулируемым приводом.
Однако принципы автоматизированного пуска используются в качестве средства контроля при управлении регулируемым приводом.
Для пуска двигателя подают напряжение на катушку контактора Л нажатием кнопки.
Пуск. При этом закрываются его замыкающие контакты в цепи якоря. Блок-контакт контактора Л шунтирует кнопку Пуск, поэтому размыкание кнопки при прекращении нажатия на нее не влечет за собой разрыв цепи катушки Л.
Напряжения срабатывания реле 1РУ, 2РУ и 3РУ определяются соотношениями
Рис. 9-3. Схема цепей якоря двигателя постоянного тока независимого возбуждения при управлении пуском в функции тока.
При последовательном срабатывании каждого из реле поочередно закрываются их замыкающие контакты в цепях катушек контакторов ускорения 1У, 2У и 3У.
 В той же последовательности замыкаются их контакты, шунтирующие ступени сопротивления.
В той же последовательности замыкаются их контакты, шунтирующие ступени сопротивления.Сопротивления, включенные последовательно с катушками реле, служат для регулирования уставки их срабатывания в зависимости от скорости двигателя.
Для остановки двигателя достаточно нажать кнопку Стоп, разрывающую цепь катушки линейного контактора Л.
Схемы пуска в функции тока содержат реле, включаемые последовательно в цепь якоря (рис. 9-3). Здесь размыкающие контакты реле допускают включение контакторов ускорения лишь при снижении тока якоря до значения тока отпадания реле.
Оба рассмотренных принципа пуска имеют общий недостаток. При повышенном значении момента механической нагрузки в первом случае может не повыситься скорость, а во втором — ток может не снизиться до величин соответствующих уставок реле и двигатель при своем разгоне задержится на некоторой промежуточной скорости. Сопротивления, не рассчитанные на продолжительную нагрузку, могут при этом выйти из строя в результате перегрева.
Диаграмма пуска для обеих рассмотренных схем подобна изображенной на рис. 5-7.
Схема управления двигателем постоянного тока с регулированием скорости.
Универсальных схем регулируемых электроприводов постоянного тока, пригодных для любого механизма, не существует. В зависимости от особенностей механизма и условий его работы для конкретных случаев разрабатывается система управления, отвечающая поставленной задаче, либо применяется известная схема с необходимыми дополнениями и изменениями.
В виде примера построения системы регулируемого привода рассмотрим схему управления двигателя с реверсированием, изменением скорости и динамическим торможением (рис. 9-4). Система предусматривает возможность работы на четырех основных ступенях скорости и на одной дополнительной ступени повышенной скорости. Предполагается, что основные ступени используются для рабочих движений механизма под нагрузкой, а дополнительная скорость — для маневрирования, без технологической нагрузки.
В установках гидромеханизации рассматриваемая система может быть применена для привода тяговых лебедок (папильонажных или становых) на землесосных снарядах и драгах.
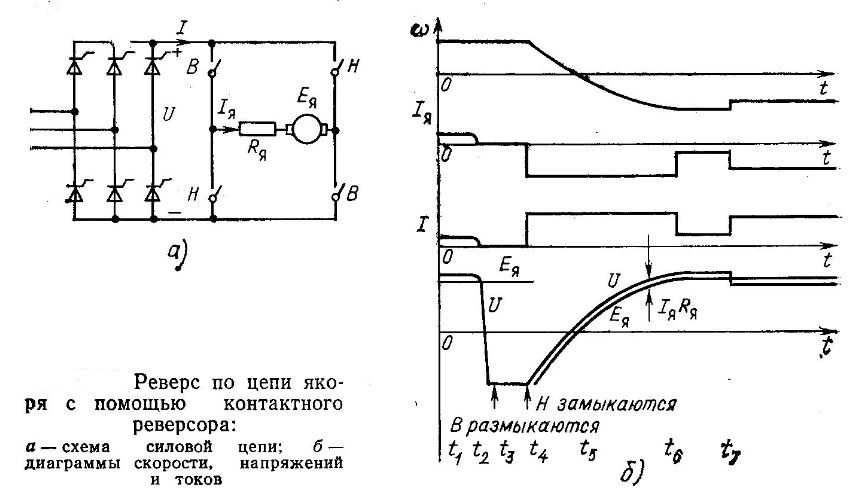
Рис. 9-4. Система управления двигателем постоянного тока независимого возбуждения с регулированием скорости.
а—принципиальная схема; б — диаграмма динамического процесса.
Переключения основных скоростей и реверсирование двигателя производятся командоконтроллером КК. Включение повышенной скорости осуществляется нажатием кнопки маневровой скорости КМС.
Для приведения системы регулирования в рабочее состояние необходимо поворотом переключателя Я подать напряжение на обмотку возбуждения ОВ и схему управления.
При отключении переключателя Я обмотка ОВ замыкается через диод Д на разрядное сопротивление СР. Последнее необходимо для предотвращения возможного пробоя изоляции обмотки возбуждения от перенапряжения, возникающего при отключении вследствие большой индуктивности ее катушек.
В цепь обмотки ОВ введено реле обрыва поля РОП, которое своими контактами в цепи реле напряжения PH обеспечивает отключение двигателя, предотвращая его недопустимый разгон при исчезновении тока в цепи обмотки возбуждения, так как согласно (5-15) скорость двигателя независимого возбуждения обратно пропорциональна магнитному потоку.
1 В случаях, когда по этим показателям двигатель с короткозамкнутым ротором оказывается непригодным, используют двигатели с фазным ротором, с постоянно подключенным сопротивлением в цепи ротора.
Пуск двигателя возможен только из нулевого положения командоконтроллера, в котором якорь реле PH втягивается и своими замыкающими контактами обеспечивает наличие напряжения на левой (по схеме) группе контактов командоконтроллера при любом его положении.
Для пуска двигателя рукоятку командоконтроллера поворачивают на одно деление Вперед или Назад. При этом замыкаются цепи контакторов IB, 2В либо 1Н, 2Н и двигатель начинает вращаться в том или другом направлении при полностью введенном сопротивлении якоря, работая на первой реостатной характеристике. Одновременно открываются размыкающие контакты одного из реверсивных контакторов (1В или 1Н) в цепи катушки реле ускорения 1РУ. Якорь реле 1РУ отпадает, и контакты 1РУ в цепи катушки контактора первой ступени ускорения 1У замыкаются с выдержкой времени, подготавливая цепь контактора 1У к включению. Для перехода, на следующую ступень скорости поворачивают рукоятку контроллера на следующее деление, замыкая цепь контактора 1У. Последний, включаясь, шунтирует первую ступень сопротивления цепи якоря C1—С2 и катушку реле 2РУ, размыкающие контакты которого замыкаются, подготавливая цепь катушки контактора 2У к включению. Аналогично выполняется переход на третью и четвертую ступени скорости.
Одновременно открываются размыкающие контакты одного из реверсивных контакторов (1В или 1Н) в цепи катушки реле ускорения 1РУ. Якорь реле 1РУ отпадает, и контакты 1РУ в цепи катушки контактора первой ступени ускорения 1У замыкаются с выдержкой времени, подготавливая цепь контактора 1У к включению. Для перехода, на следующую ступень скорости поворачивают рукоятку контроллера на следующее деление, замыкая цепь контактора 1У. Последний, включаясь, шунтирует первую ступень сопротивления цепи якоря C1—С2 и катушку реле 2РУ, размыкающие контакты которого замыкаются, подготавливая цепь катушки контактора 2У к включению. Аналогично выполняется переход на третью и четвертую ступени скорости.
 В данном случае осуществляется автоматический контроль пуска двигателя по времени.
В данном случае осуществляется автоматический контроль пуска двигателя по времени.Переход от одной скорости к другой при замыкании контактов командоконтроллера и длительная работа на любой из скоростей происходят при полном потоке возбуждения, так как в течение всего описанного процесса управления добавочное сопротивление СД шунтировано контактами УП.
Для работы на повышенной, маневренной скорости в схеме используется принцип ослабления потока возбуждения двигателя.
При нажатии на кнопку КМС замыкается цепь катушки контактора 4У, контролируемая блок-контактом контактора третьей ступени скорости 3У. Контактор 4У своими замыкающими контактами включает цепь катушки реле управления полем РУП, через которую проходит полный ток якоря. При срабатывании контактора 4У прерывается цепь катушки контактора УП из-за размыкания размыкающих контакторов 4У; контакты УП, шунтирующие сопротивление СД, размыкаются, и обмотка возбуждения ОВ оказывается включенной последовательно с сопротивлением СД.

На рис. 9-4,б показана примерная диаграмма изменения во времени тока возбуждения, тока якоря и скорости двигателя. Как видно из диаграммы, пики и провалы тока якоря отличаются от значений токов срабатывания Iср и отпускания Iотп реле РУП, что обусловлено собственным временем срабатывания реле.
Тенденция к постепенному снижению тока возбуждения в процессе вибрационного регулирования объясняется различием электромагнитной постоянной времени цепи возбуждения при последовательно включенном сопротивлении и без него.
 Спад тока возбуждения, а следовательно, возрастание тока якоря происходят медленнее, чем нарастание возбуждения и сопутствующее ему снижение тока якоря, потому что темп снижения тока возбуждения определяется постоянной времени
Спад тока возбуждения, а следовательно, возрастание тока якоря происходят медленнее, чем нарастание возбуждения и сопутствующее ему снижение тока якоря, потому что темп снижения тока возбуждения определяется постоянной временикоторая меньше постоянной времени цепи при увеличении возбуждения.
В определенный момент времени пик тока якоря не достигает значения тока срабатывания реле, после чего вибрационный процесс прекращается; ток возбуждения и ток якоря только снижаются, и скорость приближается к своему установившемуся значению.

В схему введены выключатели положения механизма КВВ и КВН (конечные выключатели). Срабатывание любого из них исключает возможность дальнейшего вращения двигателя в том же направлении, но допускает противоположное вращение.
При отключении якоря контактами В или Н, что может иметь место при остановке командоконтроллером (поворот рукоятки в нулевое положение), срабатывании реле защиты РМ или конечного выключателя КВВ или КВН, двигатель переходит в режим динамического торможения. Катушка УП получает питание через размыкающий блок-контакт 4У; обмотка возбуждения ОВ при шунтированном сопротивлении СД обтекается полным током и магнитный поток имеет номинальное значение.
Катушка реле РТ питается напряжением от продолжающего вращаться якоря; катушка контактора торможения Т получает питание через контакты РТ, 1В и 1Н и замыкает своими контактами цепь тормозного сопротивления СТ. Двигатель переходит в генераторный режим, ток якоря изменяет свое направление, скорость снижается, и при некотором ее значении якорь реле РТ отпадает, тормозной контактор Т отключается и процесс динамического торможения заканчивается.
Диаграмма изменений тока якоря и возбуждения, а также скорости двигателя при динамическом торможении также показана на рис. 9-4,б.
- Назад
- Вперёд
Управление двигателем постоянного тока – схема и важные нюансы
Двигатель постоянного тока способствует превращению энергии постоянного тока в работу механического типа.
На сегодняшний день практичное управление двигателем постоянного тока осуществляется не только в соответствии с традиционными схемами, но также согласно достаточно оригинальным или малоизвестным схемотехническим решениям.
Схема управления двигателем постоянного тока
Самым простым способом регулировки скорости двигательного вращения является применение модуляции (РWМ) широтно-импульсного типа, или ШИМ.
Данный способ базируется на подаче питающего напряжения на движок в форме импульсов со стабильной частотой следования, но изменением длительности.
Вся ШИМ-сигнальная система имеет очень важный критерий, представленный коэффициентом стандартного заполнения (Duty сyсlе).
Такая величина соответствуют соотношению импульсной длительности к его периоду:
D = (t/Т) × 100 %
Для самой простой схемы реализации управления ДПТ характерно наличие полевой транзисторной части с подачей на затвор ШИМ-сигнальной системы. В подобной схеме транзистор представляет особый электронный ключ, которым один из двигательных выводов коммутируется на землю. В этом случае открытие полупроводникового триода осуществляется именно на момент импульсной длительности.
Конструкция двигателя постоянного тока
При низкой частоте и в условиях незначительного коэффициента ШИМ-сигнала преобразующее устройство срабатывает рывками. Высокая частота РWМ, составляющая несколько сотен Герц, способствует непрерывному вращению мотора, а скорость вращательного движения в этом случае изменяется строго пропорционально коэффициенту заполняемости.
Известно множество схематичных решений, генерирующих ШИМ-сигнал, но к числу наиболее простых относится «схема таймера 555», нуждающаяся в минимальном количестве компонентов и не требующая особой настройки.
Управление двигателем при помощи биполярного транзистора
Использование биполярного транзистора в качестве надежного переключателя — один из способов управления двигателем. Выбор пассивного элемента электрической цепи, или R, предполагает протекание тока, не превышающего показатели максимальных токовых величин в микроконтроллере.
Полупроводниковый триод должен иметь соответствующий коллекторный ток и оптимальные максимальные значения, а также выделяемую мощность:
P = Uкэ × Iк .
Одной из проблем, возникающих в процессе использования биполярных полупроводниковых триодов, является избыточный базовый ток.
Схема управления
Как правило, токовое соотношение на выходном сигнале и входном транзисторе составляет 100 hfe. Функционирование элемента в условиях насыщения вызывает сильное снижение коэффициента.
Оптимальным вариантом является транзисторное комбинирование, или высокоэффективный транзистор Дарлингтона, который характеризуется высокими показателями токового усиления и незначительной скоростью работы.
Индуктивные нагрузки
При выборе индуктивной нагрузки, представленной двигателем, решение проблемы режима плавного управления мощностными показателями мотора не всегда дается легко, что зависит от нескольких факторов, представленных:
- мощностными показателями движка;
- инерционностью нагрузочного уровня вала;
- реактивными обмоточными показателями;
- активными обмоточными показателями.
Управление двигателями постоянного тока
Оптимальным вариантом для решения практически всех перечисленных выше проблем является использование частотных инверторов.
Индуктивный тип схемы для управления двигателем ПТ не отличается особой сложностью по сравнению с частотным управлением, а также способен обеспечивать вполне приемлемую результативность.
Аспекты проблем при управлении двигателем ПТ
Качественное управление нагрузкой не требует в некоторых случаях потенциометра, а может быть задействовано на использовании микроконтроллера.
Наиболее важные проблемы управления представлены:
- обязательным присутствием гальванической развязки;
- плавным управлением мощностными показателями;
- отсутствием старт-стопного типа управления;
- контролированием перехода Zеrо — Сrоss;
- некоторыми особенностями подбора RC-фильтра snubbеr сглаживающего типа.
Важно помнить, что данная схемотехника отличается незначительной сложностью, при которой инициализация микроконтроллера требует достаточного количества времени, что обусловлено конкретно решаемыми задачами при нахождении выходных сигналов в третьем состоянии.
Управление при помощи MOSFET транзистора
МОSFЕТ (mеtаl-охidе-sеmiсоnduсtоr fiеld еffесt trаnsistоr) — полевые полупроводниковые триоды или метал-окисел-полупроводники p-канального типа открываются на затворе отрицательным напряжением по отношению к источнику. Диод паразитного типа в канальной структуре анода подсоединяется к части стока, а катод соединяется с истоком.
Классическая схема включения MOSFET в ключевом режиме
Такой тип канала, как правило, подсоединяется таким образом, чтобы на сток приходились наиболее отрицательные показатели напряжения по сравнению с истоком.
MOSFET-транзисторы высокой степени мощности достаточно популярны, что обусловлено исключительно высокой переключательной скоростью в условиях низкого уровня мощности управления, прикладываемой к затвору.
Управление при помощи реле
Процесс управления достаточно мощным двигателем ПТ осуществляется посредством реле-модуля спаренного типа. Процесс подключения мотора к реле предполагает обязательный учет наличия трех выходных отверстий:
- NО (Nоrmаlly ореn) — нормально-разомкнутого типа;
- СОМ (Соmmоn) — общего типа;
- NС (Nоrmаlly сlоsеd) — нормально-замкнутого типа.
Управление направлением вращения двигателя постоянного тока
Контактная группа устройства, преобразующего любой вид энергии в работу механического типа, подсоединяется к общим релейным контактам (СОМ).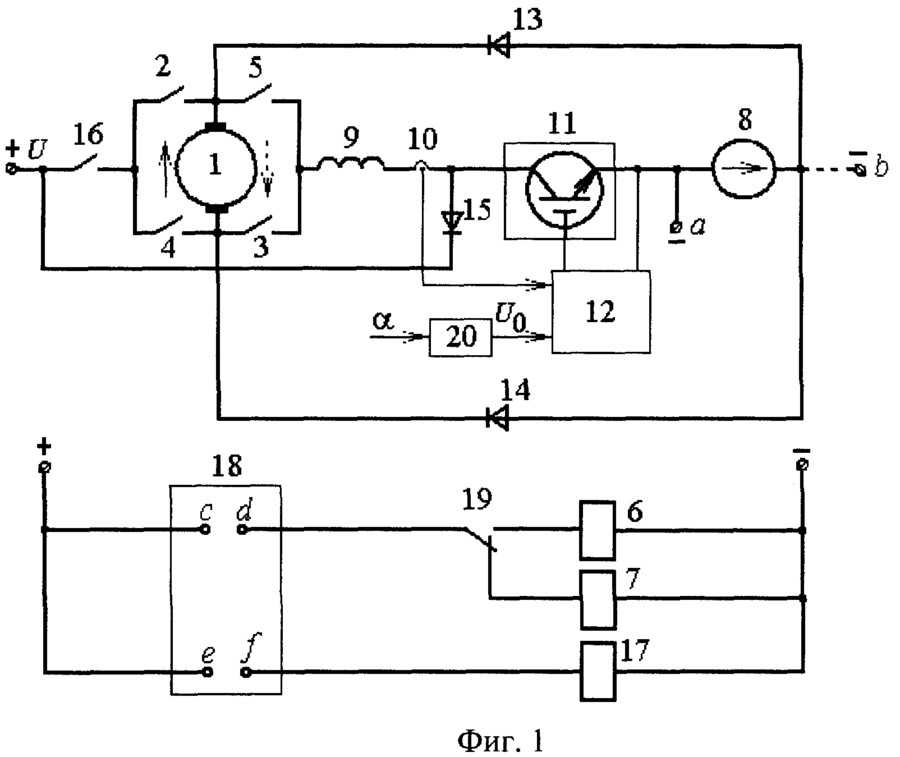 «Плюс» элемента питания подключается к контактам нормально-разомкнутого реле (NО), а «минус» фиксируется на контактной группе реле нормально-замкнутого типа (NС).
«Плюс» элемента питания подключается к контактам нормально-разомкнутого реле (NО), а «минус» фиксируется на контактной группе реле нормально-замкнутого типа (NС).
Реализация полного мостоуправления двигателя осуществляется при включении и выключении реле соответствующим образом.
При помощи H-моста
Управление двигателем посредством H-моста с управляющими логическими сигналами на входах и вращением в две стороны осуществляется несколькими вариантами Н-мостов:
- транзисторным H-мостом, простым в изготовлении и достаточно мощным. К недостаткам можно отнести риск короткого замыкания при подаче на два входа;
- двойным H-мостом, собранным на маломощной микросхеме. Минусы данного варианта представлены слишком малой мощностью и необходимостью подключения вывода Е на питании к «плюсу»;
- одиночным Н-мостом, собранным на микросхеме, что обеспечивает подачу единички на два входа и может стать причиной торможения работы двигателя.
Транзисторный Н-мост
Самым простым вариантом станет сборка Н-моста на МОSFЕT-транзисторах. Именно этот способ сочетает в себе легкость выполнения и достаточные показатели мощности, но не предполагает одновременную подачу на две единицы.
Именно этот способ сочетает в себе легкость выполнения и достаточные показатели мощности, но не предполагает одновременную подачу на две единицы.
Известно множество вариантов микросхем, используемых для управления двигателем, включая ТLЕ4205 и L298D, а также стандартные электромагнитные реле, но перечисленные выше способы относятся к категории самых доступных.
Управление шаговым двигателем
Для управления двигателем шагового типа необходима подача постоянного напряжения на обмоточную часть с соблюдением максимально точной последовательности, благодаря чему обеспечивается точность угла осевого поворота.
При наличии постоянных магнитов
Шаговые двигатели, имеющие постоянные магниты, чаще всего применяются в бытовых приборах, но могут встречаться в устройствах промышленного типа. Доступные по стоимости двигатели обладают низким крутящим моментом и низкой скоростью вращения, благодаря чему прекрасно подходят для компьютеров.
Управление шаговым двигателем
Изготовление двигателей шагового типа на основе постоянных магнитов не отличается сложностью и экономически целесообразно только при больших объемах производства, а ограниченность использования обусловлена относительной инертностью и неприемлемостью применения в условиях точного временного позиционирования.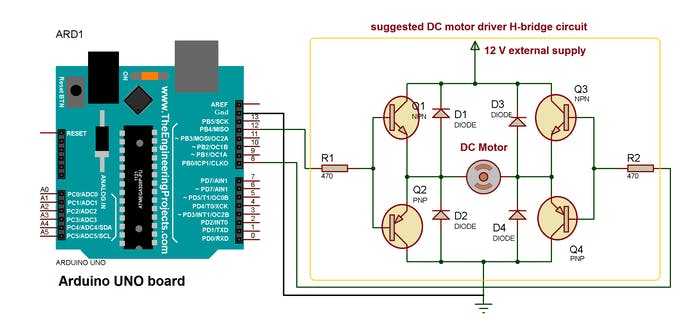
При наличии переменного магнитного сопротивления
Шагового типа двигатели, имеющие переменное магнитное сопротивление в условиях отсутствия стабильного магнита, характеризуются свободным роторным вращением без крутящего вращения остаточного типа. Такие двигатели, как правило, устанавливаются в компактных агрегатах, включая системы микро-позиционирования. Основные достоинства такой схемы представлены чувствительностью к токовой полярности.
Гибридный вариант
Гибридного типа двигатели в настоящее время относятся к категории наиболее популярных агрегатов в сфере промышленности.
Вариант характеризуется очень удачным сочетанием принципа работы моторов с переменными и постоянными магнитами.
Значительное количество двигателей гибридного типа отличается классическим двухфазным строением.
Заключение
Необходимость выполнять изменение полярности напряжения может возникать в процессе управления двигателем или при использовании схемы мостового преобразователя напряжения. В этом случае ключи чаще всего представлены реле, полевыми и биполярными транзисторами, а также H-мостами, встраиваемыми в микросхему.
В этом случае ключи чаще всего представлены реле, полевыми и биполярными транзисторами, а также H-мостами, встраиваемыми в микросхему.
Цепь управления скоростью двигателя постоянного тока
от Shagufta Shahjahan 5309 просмотров
В этом уроке мы демонстрируем проект схемы управления скоростью двигателя постоянного тока. Главной особенностью DC Motor Speed CONTROL является схема ШИМ на основе микросхемы 555, предназначенная для получения переменного напряжения по сравнению с постоянным напряжением. Вот процедура для PWM.
Возьмите простую схему, как показано на следующей схеме. Эта схема проста в изготовлении и требует нескольких недорогих компонентов, включая источник питания, двигатель постоянного тока, микросхему таймера 555, резисторы, конденсатор, потенциометр, переключатель и L29. 3D ИС.
3D ИС.
Buy from Amazon
Hardware ComponentThe following components are required to make DC Motor Speed Control Circuit
| S. No | Component | Value | Qty |
|---|---|---|---|
| 1 | 555 Таймер IC | 1 | |
| 2 | Конденсатор | 10NF | 1 |
| 3 | ПЕРЕКЛЮЧАТЕЛЬ | ||
| 3 | |||
| 3 | 0035 – | 1 | |
| 4 | Diode | IN4148 | 2 |
| 5 | potentiometer | 100K -220K | 1 |
| 6 | IC | L293D | 1 |
| 7 | Small DC motor | – | 1 |
| 8 | Power supply | 9V | 1 |
| 9 | Resistor | 1K, 100R | 1 |
NE555 IC Pinout
Для подробного описания расписания, функций Dimension и спецификаций COUNTER 9001 9001 4005 DASPANARANARAN DAST DASPANARANARVAN 7005 7005 DARSE 7005 7005 DARSE 7005 7005 7005 7005 7005 7005 7005 7005 7005 7005 7005 7005 7005 7005 70057 ТАЙМЕР IC выдает ШИМ-сигнал, зависящий от отношения сопротивления потенциометра к источнику питания, с коэффициентом заполнения. Конденсатор должен здесь нагружать и разгружать другой набор резисторов из-за потенциометра и пары диодов. Таким образом, конденсатор заряжается и разряжается за разное время. Выход высокий во время загрузки конденсатора и низкий во время разгрузки конденсатора. Мы различаемся высоким выходным сигналом, низким временем вывода и, следовательно, ШИМ.
Конденсатор должен здесь нагружать и разгружать другой набор резисторов из-за потенциометра и пары диодов. Таким образом, конденсатор заряжается и разряжается за разное время. Выход высокий во время загрузки конденсатора и низкий во время разгрузки конденсатора. Мы различаемся высоким выходным сигналом, низким временем вывода и, следовательно, ШИМ.
ШИМ таймера подается на сигнальный вывод h-моста L239D для управления генератором постоянного тока. Мы получаем другое среднеквадратичное напряжение на клеммах и обороты в минуту с разным коэффициентом ШИМ. ШИМ таймера подключен ко второму сигнальному выводу для изменения направления вращения.
Области применения и использование
Двигатели постоянного тока подходят для многих применений, включая конвейеры, поворотные столы и другие применения, требующие динамической скорости и постоянного и низкоскоростного крутящего момента. Они хорошо вписываются даже в сложные приложения для динамического торможения и управления задним ходом, популярные во многих типах промышленного оборудования.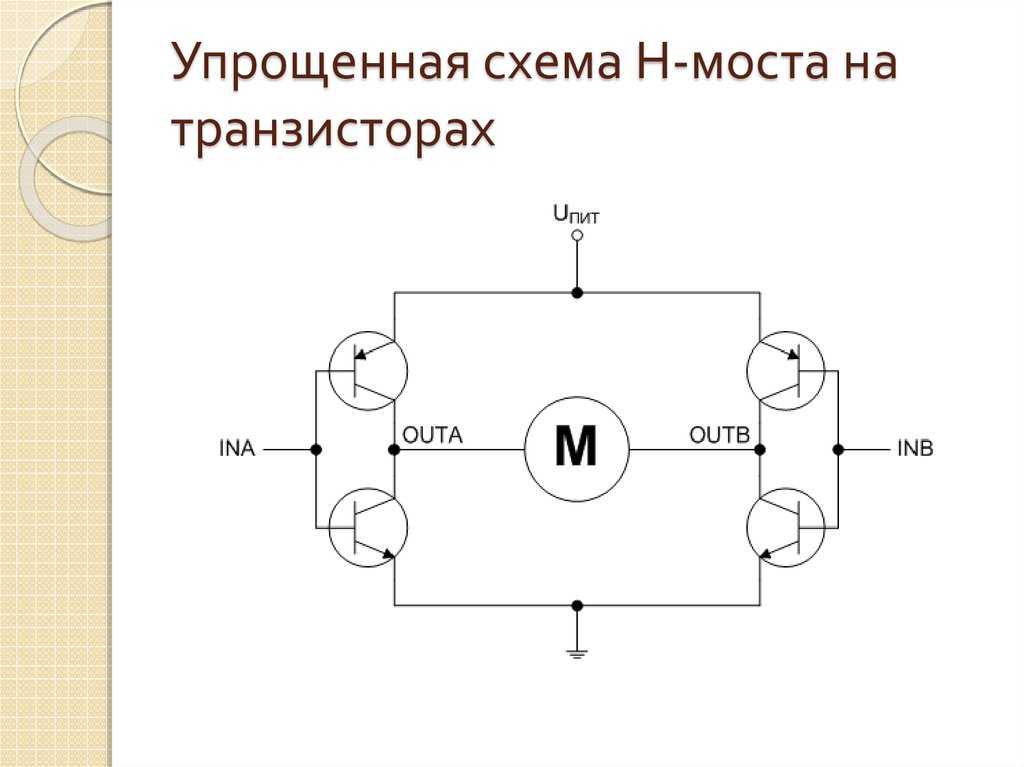
Похожие сообщения:
Контроллер двигателя постоянного тока — информация об электронике от PenguinTutor
Направление двигателя постоянного тока определяется направлением тока через двигатель, поэтому, меняя положительное и отрицательное питание, мы можем заставить двигатели изменить направление.
Схема H-моста
Конфигурация H-моста является распространенным способом изменения направления подачи питания. H-мост назван так, потому что он имеет форму буквы H и использует две пары переключателей, которые необходимо переключать вместе. Это проще всего объяснить, используя видео ниже.
Пары переключателей расположены по диагонали друг к другу. Каждая пара переключателей должна быть замкнута одновременно. Таким образом, на диаграммах ниже S1 и S4 образуют одну пару, а S2 и S3 — другую пару.
Это Н-мост в выключенном состоянии. Все четыре переключателя выключены, и на двигатель не подается питание.
Когда S1 и S4 замкнуты, положительный источник питания идет слева от двигателя, а отрицательный — справа. После этого двигатель будет работать в одном направлении.
Чтобы изменить направление, необходимо разомкнуть переключатели S1 и S4, а затем закрыть S2 и S3. Положительное питание теперь подается справа от двигателя, а отрицательное — слева, поэтому двигатель теперь будет вращаться в противоположном направлении.
Важно, чтобы S1 и S3 никогда не закрывались одновременно, и то же самое с S2 и S4. Их совместное включение может привести к короткому замыканию в источнике питания.
ИС H-моста — SN754410 Quad Half-H драйвер IC
Схема H-моста может быть выполнена с дискретными транзисторами/полевыми транзисторами, интегральной схемой или даже реле (хотя реле затруднило бы реализацию управления скоростью). Для небольших двигателей обычно проще всего использовать интегральную схему (чип) H-моста.
Для небольших двигателей обычно проще всего использовать интегральную схему (чип) H-моста.
Интегральная схема SN754410 представляет собой счетверенный драйвер Half-H, который содержит четыре модуля. Объединение двух таких модулей обеспечивает единую схему Н-моста. Таким образом, мы можем использовать одну микросхему для управления двумя двигателями.
Схема PIN-кода показана ниже:
На логической схеме показано, как четыре модуля полумоста могут быть сконфигурированы как пара контроллеров H-моста.
Чтобы убедиться, что ИС подходит, мы должны обратиться к техническому описанию, доступному у производителя (в данном случае Texas Instruments). Согласно техническому описанию микросхема может использоваться для переключения до 1 А для источников питания от 4,5 В до 36 В и включает в себя отдельный источник питания для входа и выхода. Все входы совместимы с логикой TTL и CMOS, которая будет работать как с GPIO от Raspberry Pi, так и с Arduino. Источник питания для IC должен быть 5 В, что такое же, как у Raspberry Pi.
Источник питания для IC должен быть 5 В, что такое же, как у Raspberry Pi.
Существует два различных способа использования входных сигналов для контроллера H-bridge.
Один из способов — иметь один выход для направления вращения двигателя, который инвертируется между двумя входами, а затем использовать контакт включения для включения и выключения двигателя. Так, например, если бы у вас был вход высокого направления, который перешел бы на вход 1A и инвертировал бы низкий уровень на входе 2A и наоборот, чтобы изменить направление. Для этого потребуются только два входа для SN754410, но потребуется добавить в схему инвертор. Или это можно реализовать, имея три выхода от GPIO, один из которых инвертирован.
Другой вариант, который мы будем использовать здесь, состоит в том, чтобы постоянно активировать контакт EN, подключив его к высокому уровню, а затем используя два входа для включения и выключения двигателя, а также для определения направления. Это достигается установкой обоих 1A и 2A на низкий уровень, что является выключенным состоянием, а затем переключением одного из них на высокий уровень, чтобы включить двигатель и установить направление.
Принципиальная схема для использования с Raspberry Pi GPIO
На приведенной ниже схеме показано, как можно использовать GPIO для управления контроллером мотора SN754410 H-bridge.
Его можно построить на макетной плате с помощью устройства Raspberry Pi GPIO, как показано ниже.
Он также доступен на печатной плате на основе печатной платы контроллера двигателя Ryanteck.
С диодами или без диодов
Двигатели являются электромагнитными устройствами. Это означает, что они используют электронный ток для создания магнитного поля, которое вызывает действие, в данном случае вращение двигателя. Когда питание отключается, магнитное поле разрушается, или, если двигатель продолжает вращаться, он может действовать как генератор. Когда это происходит, может возникнуть скачок напряжения, вызванный обратной ЭДС (электродвижущей силой), которая может повредить чувствительные электронные компоненты. Обычно диод подключается к магнитной нагрузке в обратном направлении, чтобы предотвратить повреждение электронной схемы обратной ЭДС.