
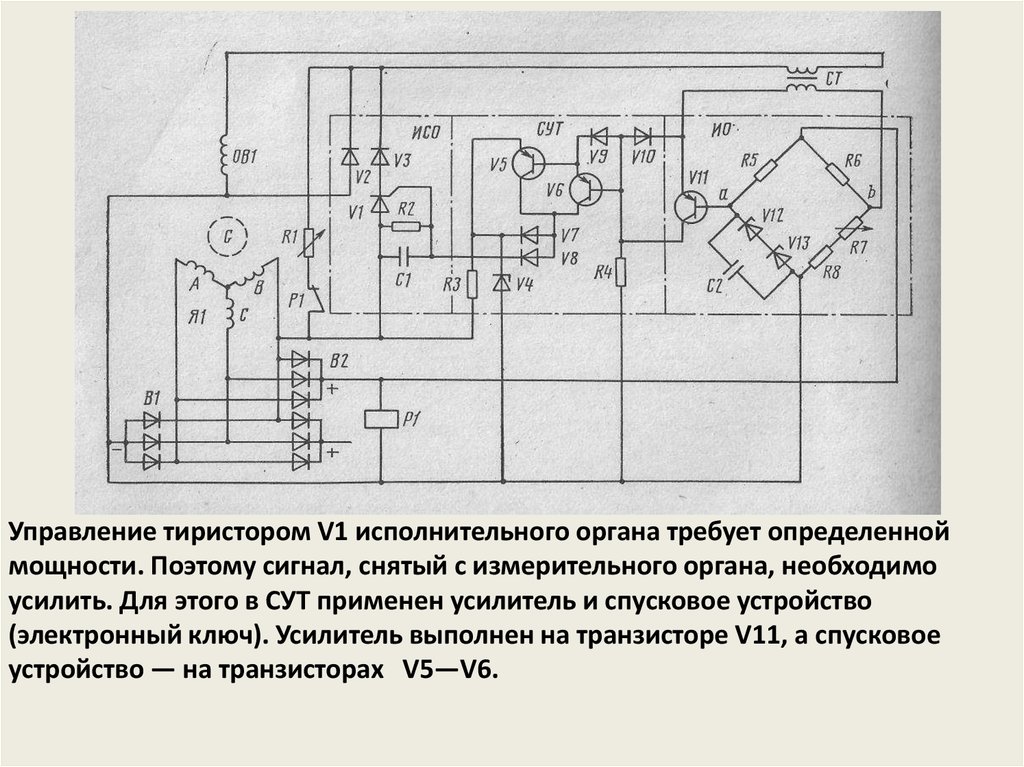
Управление тиристорами и симисторами
Самый простой способ управления тиристорами – это подача на управляющий электрод прибора постоянного тока с величиной, необходимой для его включения (рис. 1). Ключ SA1 на рис. 1 и на последующих рисунках – это любой элемент, обеспечивающий замыкание цепи: транзистор, выходной каскад микросхемы, оптрон и др. Этот способ прост и удобен, но обладает существенным недостатком – требуется довольно большая мощность управляющего сигнала. В табл. 1 приведены наиболее важные параметры для обеспечения надежного управления некоторыми самыми распространенными тиристорами (три первых позиции занимают тринисторы, остальные – симисторы). При комнатной температуре для гарантированного включения перечисленных тиристоров требуется ток управляющего электрода Iу вкл равный 70-160 мА. Следовательно, при напряжении питания, типовом для собранных на микросхемах узлов управления (10-15 В), требуется постоянная мощность 0,7-2,4 Вт.
Отметим, что полярность управляющего напряжения для тринисторов положительная относительно катода, а для симисторов – или отрицательная для обоих полупериодов, или совпадающая с полярностью напряжения на аноде.
Реальные величины тока управляющего электрода, достаточного для включения тиристора, обычно меньше цифр, приведенных в табл. 1, поэтому нередко идут на его снижение относительно гарантированных значений: для тринисторов – до 7-40 мА, для симисторов – до 50-60 мА. Такое снижение часто приводит к ненадежной работе устройств, и необходимости предварительной проверки или же подбора тиристоров. Уменьшение управляющего тока также может приводить к возникновению помех радиоприему, поскольку включение тиристоров при малых токах управляющего электрода происходит при относительно большом напряжении на аноде – несколько десятков вольт, что приводит к броскам тока через нагрузку и, следовательно, к мощным помехам.
Недостатком управления тиристорами постоянным током является гальваническая связь источника управляющего сигнала и сети. Если в схеме с симистором (рис. 1, б) при соответствующем включении сетевых проводов источник управляющего сигнала можно соединить с нулевым проводом, то при использовании тринистора (рис 1, а) такая возможность возникает лишь при исключении выпрямительного моста VD1-VD4. Последнее приводит к однополупериодной подаче напряжения на нагрузку и двукратному уменьшению поступаемой в нее мощности.
Если в схеме с симистором (рис. 1, б) при соответствующем включении сетевых проводов источник управляющего сигнала можно соединить с нулевым проводом, то при использовании тринистора (рис 1, а) такая возможность возникает лишь при исключении выпрямительного моста VD1-VD4. Последнее приводит к однополупериодной подаче напряжения на нагрузку и двукратному уменьшению поступаемой в нее мощности.
В настоящее время в связи с большой потребляемой мощностью запуск тиристоров постоянным током при бестрансформаторном питании пусковых узлов (с гасящим резистором или конденсатором) практически не используется.
Одним из вариантов снижения потребляемой узлом управления мощности является использование вместо постоянного тока непрерывной последовательности импульсов с относительно большой скважностью. Поскольку время включения типовых тринисторов составляет 10 мкс и менее, можно подавать на их управляющий электрод импульсы такой же длительности со скважностью, например, 5-10-20, что соответствует частоте 20-10-5 кГц.
Однако при таком способе управления выявляются некоторые новые недостатки. Во-первых, теперь тиристор включается не в самом начале полупериода сетевого напряжения, а в произвольные моменты времени, отстоящие от начала полупериода на время, не превышающее периода запускающих импульсов, т. е. 50-100-200 мкс. За это время напряжение сети может возрасти примерно до 5-10-20 В. Это приводит к возникновению помех радиоприему и к некоторому уменьшению выходного напряжения, впрочем, малозаметному.
Существует еще одна проблема. Если при включении в начале полупериода во время действия запускающего импульса ток через тиристор не достигнет тока удержания (Iуд, табл. 1), тиристор после окончания импульса выключится. Следующий импульс вновь включит тиристор, и он не выключится лишь в том случае, если к моменту окончания импульса ток через него будет больше тока удержания. Таким образом, ток через нагрузку сначала будет иметь вид нескольких коротких импульсов и лишь потом – синусоидальную форму. Если же нагрузка имеет активноиндуктивный характер (например, электродвигатель), ток через нее за время действия короткого включающего импульса может не успеть достичь величины тока удержания, даже когда мгновенное напряжение в сети максимально. Тиристор после окончания каждого импульса будет выключаться. Этот недостаток ограничивает снизу длительность запускающих импульсов и может свести на нет уменьшение потребляемой мощности.
Если же нагрузка имеет активноиндуктивный характер (например, электродвигатель), ток через нее за время действия короткого включающего импульса может не успеть достичь величины тока удержания, даже когда мгновенное напряжение в сети максимально. Тиристор после окончания каждого импульса будет выключаться. Этот недостаток ограничивает снизу длительность запускающих импульсов и может свести на нет уменьшение потребляемой мощности.
Применение импульсного запуска облегчает гальваническую развязку между узлом управления и сетью, ибо ее может обеспечить даже небольшой трансформатор с коэффициентом трансформации, близким к 1:1. Его обычно наматывают на ферритовом кольце диаметром 16-20 мм с тщательно выполненной изоляцией между обмотками. Следует предостеречь от применения малогабаритных импульсных трансформаторов промышленного изготовления. Как правило, они имеют низкое напряжение изоляции (около 50-100 В) и могут служить причиной поражения электрическим током, если при использовании прибора будет считаться, что цепь управления изолирована от сети.
Снижение требуемой при импульсном управлении мощности и возможность введения гальванической развязки позволяют применить в узлах управления тиристорами бестрансформаторное питание.
Третий широко распространенный способ управления тиристорами – подача на управляющий электрод сигнала с его анода через ключ и ограничительный резистор (рис. 2). В таком узле ток через ключ протекает в течение нескольких микросекунд, пока включается тиристор, если напряжение на аноде достаточно велико. В качестве ключей используют малощумящие электромагнитные реле, высоковольтные биполярные транзисторы, фотодинистры или фотосимисторы (схемы на рис. 2 соответственно). Способ прост и удобен, некритичен к наличию у нагрузки индуктивной составляющей, но имеет недостаток, на который нередко не обращают внимания.
Недостаток связан с противоречивостью требований к ограничительному резистору R1. С одной стороны, его сопротивление должно быть как можно меньше, чтобы включение тиристора происходило как можно ближе к началу полупериода сетевого напряжения.
Как и в случае с подачей управляющих импульсов относительно большой скважности, это приводит к возникновению помех и к некоторому уменьшению выходного напряжения. Поскольку реальная чувствительность тиристоров по управляющему электроду обычно лучше, задержка открывания тиристора относительно начала полупериода меньше рассчитанной выше предельной величины.
Сопротивление ограничивающего резистора R1 может быть уменьшено на величину сопротивления нагрузки, поскольку в момент включения они включены последовательно. Более того, если нагрузка имеет гарантированно индуктивно-резистивный характер, можно еще более уменьшить сопротивление указанного резистора. Однако если нагрузкой являются лампы накаливания, надо помнить, что их холодное сопротивление примерно в десять раз меньше рабочего.
Следует также иметь ввиду, что включающий ток симисторов имеет разную величину для положительной и отрицательной полуволн сетевого напряжения. Поэтому в выходном напряжении мо жет появиться небольшая постоянная составляющая.
Из фотодинисторов серии АОУ103/3ОУ103 для управления тиристорами в сети 220 В по максимально допустимому напряжению подходят только 3ОУ103Г, однако неоднократно проверено, что и АОУ103Б и АОУ103В годятся для работы в этом режиме.
Различие между приборами с индексами Б и В заключается в том, что подача напряжения обратной полярности на АОУ103Б не допускается. Аналогично и различие между АОУ115Г и АОУ115Д: приборы с индексом Д допускают подачу обратного напряжения с индексом Г – нет.
Существенного сокращения потребляемой цепями управления мощности можно добиться, если включать ток управляющего электрода в момент включения тиристора. Два варианта схем узлов управления, обеспечивающих такой режим, приведены на рис. 3.
Включение тринистора в схеме на рис. 3, а происходит в момент замыкания контактов ключа SA1. После включения тринистора элемент DD1.1 выключается, и ток управляющего электрода прекращается, что существенно экономит потребление по цепи управления. Если напряжение на тринисторе в момент включения SA1 будет меньше порога переключения DD1. 1, тринистор не включится, пока напряжение на нем не достигнет этого порога, т. е. не станет несколько более половины напряжения питания микросхемы. Регулировать пороговое напряжение можно подбором сопротивления нижнего плеча делителя резистора R6. Резистор R2 обеспечивает низкий логический уровень на входе 1 элемента DD1.1 при закрывании тринистора VS1 и диодного моста VD2.
1, тринистор не включится, пока напряжение на нем не достигнет этого порога, т. е. не станет несколько более половины напряжения питания микросхемы. Регулировать пороговое напряжение можно подбором сопротивления нижнего плеча делителя резистора R6. Резистор R2 обеспечивает низкий логический уровень на входе 1 элемента DD1.1 при закрывании тринистора VS1 и диодного моста VD2.
Для аналогичного включения симистора необходим узел двуполярного управления элементом совпадения DD1.1 (рис. 3, б). Этот узел собран на транзисторах VT1, VT2 и резисторах R2-R4. Транзистор VT1 включен по схеме с общей базой, и напряжение на его коллекторе становится по модулю меньше порога переключения элемента DD1.1, когда напряжение на аноде симистора VS1 положительно относительно катода и превышает его примерно на 7 В. Аналогично транзистор VT2 входит в насыщение, когда отрица тельное напряжение на аноде становится по модулю больше -6 В.
Такой узел выделения момента прохождения напряжения через нуль широко применяется в различных разработках. При всей кажущейся привлекательности узлы, выполненные по схемам, приведенным на рис. 3, и им аналогичные, обладают существенным недостатком: если по какойлибо причине тиристор не включится, ток через его управляющий электрод будет идти неопределенно долго. Поэтому необходимо предпринимать специальные меры по ограничению длительности импульса или рассчитывать источник питания на полный ток, т. е. на такую же мощность, как и для узлов по схеме на рис. 1.
При всей кажущейся привлекательности узлы, выполненные по схемам, приведенным на рис. 3, и им аналогичные, обладают существенным недостатком: если по какойлибо причине тиристор не включится, ток через его управляющий электрод будет идти неопределенно долго. Поэтому необходимо предпринимать специальные меры по ограничению длительности импульса или рассчитывать источник питания на полный ток, т. е. на такую же мощность, как и для узлов по схеме на рис. 1.
Наиболее экономичные схемы управления используют формирование одиночного включающего импульса вблизи перехода сетевого напряжения через нуль. Две несложных схемы таких формирователей приведены на рис. 4, а временные диаграммы их работы – на рис. 5 (а и б соответственно). Недостатком, впрочем совершенно несущественным в большинстве случаев, является то, что первое включение происходит не в самом начале полупериода сетевого напряжения, а в самом конце того, во время которого был замкнут ключ SA1.
Двойная длительность включающего импульса 2Т0 определяется порогом переключения элемента ИЛИ НЕ с учетом делителя R2R3 (рис.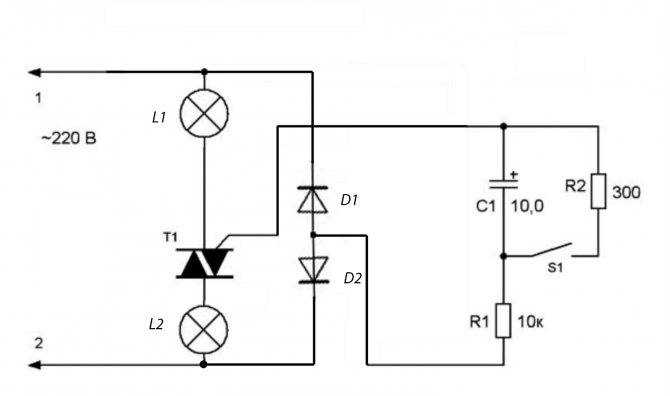 4, а) или порогом формирователя на VT1, VT2 (рис. 4, б), и рассчитывается по формуле
4, а) или порогом формирователя на VT1, VT2 (рис. 4, б), и рассчитывается по формуле
Скорость изменения сетевого напряжения при переходе через нуль
и при Uпор = 50 В двойная длительность составит 2Т0 = 1 мс. Скважность импульсов равна 10, и средний потребляемый ток в 10 раз меньше амплитудного значения, необходимого для надежного включения тиристора.
Минимальная длительность включающего импульса определяется тем, что он должен оканчиваться не ранее, чем ток через нагрузки достигнет тока удержания тиристора. Например, если нагрузка имеет мощность 200 Вт (Rн = 2202/200 = 242 Ом), а ток удержания симистора КУ208 – 150 мА, то этот ток достигается при мгновенном напряжении в сети 242×0, 15 = 36 В, т. е. при скорости нарастания 100 В/мс окончание импульса запуска должно быть не ранее, чем через 360 мкс от момента перехода напряжения через нуль. Снизить потребляемую мощность еще примерно в десять раз можно за счет подачи на третий вход элементов ИЛИ – НЕ схем на рис. 4 непрерывной последовательности импульсов (показано штриховыми линиями), как это было упомянуто в начале статьи применительно к узлам по схемам на рис. 1. При этом проявляются те же недостатки, что и при непрерывной подаче импульсов на управляющий электрод.
4 непрерывной последовательности импульсов (показано штриховыми линиями), как это было упомянуто в начале статьи применительно к узлам по схемам на рис. 1. При этом проявляются те же недостатки, что и при непрерывной подаче импульсов на управляющий электрод.
Для уменьшения потерь мощности можно сформированный в узлах по схемам на рис. 4 импульс, продифференцировать его, и продифференцированный задний фронт использовать как запускающий для тиристора (рис. 6). Параметры этого запускающего импульса Ти следует выбирать так. Он должен начинаться как можно раньше после прохождения сетевого напряжения через нуль, чтобы бросок тока через нагрузку в момент включения в начале каждого полупериода был бы минимальным и минимальными были бы помехи и потери мощности. Здесь ширина импульса, формируемого в момент прохождения напряжения сети через нуль, ограничена снизу только временем перезаряда дифференцирующей цепи C1R7 и может быть достаточно малой, но конечной. Оканчиваться импульс должен, как и для предыдущего варианта, не ранее, чем когда ток через нагрузку достигнет тока удержания тиристора.
Схема узла, формирующего импульс включения тиристора точно в момент перехода сетевого напряжения через нуль, приведена на рис. 7, а, а временная диаграмма его работы – на рис. 7, б.
Цепь из резисторов R1-R3 и элемента DD1.1 формирует короткие импульсы (60-100 мкс) в момент перехода сетевого напряжения через нуль. Эти импульсы заряжают конденсатор С1 до напряжения питания. Конденсатор относительно медленно разряжается через резистор R4, и на выходе DD1.2 формируется импульс отрицательной полярности с длительностью, определяемой постоянной времени цепочки R4C1. При указанных на схеме номиналах длительность импульса составляет примерно 400 мкс. Схема узла управления симистором с близкими параметрами приведена на рис. 8.
При работе узлов по схемам на рис. 7 и 8 подача на управляющий электрод импульса включения спрямляет выходную характеристику тиристора в момент прохождения сетевого напряжения через нуль и при правильно выбранной длительности импульса удерживает тиристор во включенном состоянии до момента достижения тока удержания даже при наличии небольшой индуктивной составляющей нагрузки. Источник питания таких узлов может быть собран по бестрансформаторной схеме с гасящим резистором или, что еще лучше, конденсатором. Помех радиоприему такое включение тиристоров не создает и может быть рекомендовано для всех случаев управления нагрузками с малой индуктивной составляющей.
Источник питания таких узлов может быть собран по бестрансформаторной схеме с гасящим резистором или, что еще лучше, конденсатором. Помех радиоприему такое включение тиристоров не создает и может быть рекомендовано для всех случаев управления нагрузками с малой индуктивной составляющей.
Если же нагрузка имеет выраженный индуктивный характер, можно рекомендовать схемы управления, приведенные на рис. 2. Для уменьшения помех радиоприему необходимо включение в сетевые провода помехоподавляющих фильтров, а если провода от регулятора до нагрузки имеют заметную длину, то и в эти провода тоже.
Выше были рассмотрены варианты управления тиристорами при их использовании в качестве ключей. При фазоимпульсном управлении мощностью нагрузок можно использовать описанные выше схемотехнические решения по формированию импульсов в моменты перехода сетевого напряжения через нуль для запуска времязадающего узла запуска тиристора. Отметим, что такой узел должен давать стабильную задержку включения тиристора, не зависящую от напряжения сети и температуры, а длительность формируемого импульса должна обеспечить достижение тока удержания независимо от момента включения нагрузки в пределах полупериода.
Драйверы SEMIKRON для управления тиристорными модулями
Трудно спорить с тем, что самыми популярными элементами для мощных импульсных применений являются транзисторы MOSFET и IGBT. Это объясняется, в первую очередь, большими значениями достижимой плотности мощности, компактностью и высокой эффективностью построенных на их основе преобразователей. Кроме того, эти компоненты позволяют разрабатывать импульсные преобразовательные устройства, удовлетворяющие жестким требованиям по электромагнитной совместимости.
Однако тиристоры и симисторы еще долго будут оставаться элементами, привлекательными для разработчиков, благодаря своей дешевизне, простоте управления и надежности. Именно поэтому они выпускаются практически всеми крупнейшими изготовителями силовых полупроводников.
Компания SEMIKRON является одним из ведущих мировых производителей, специализирующимся на разработке компонентов для изделий силовой электронной техники: электротранспорта, приводов, блоков вторичного электропитания, устройств промышленной автоматизации и энергетики, автомобильной промышленности. Кроме известных на весь мир модулей IGBT SEMIKRON производит широкую гамму компонентов общего применения, в том числе тиристорные модули и контроллеры для управления ими, речь о которых и пойдет в данной статье.
Кроме известных на весь мир модулей IGBT SEMIKRON производит широкую гамму компонентов общего применения, в том числе тиристорные модули и контроллеры для управления ими, речь о которых и пойдет в данной статье.
Драйверы, предназначенные для управления тиристорами и симисторами, выпускаются рядом фирм. Российским разработчикам хорошо известны микросхемы серии МОС30хх производства Motorola. Они изготовляются в малогабаритных корпусах,имеют оптическую развязку, для их включения требуется небольшое количество внешних компонентов. Схема подключения драйвера МОС30хх, управляемого током логического элемента D1, к симистору Th2 показана на рис. 1, а, акпаре тиристоров Th2 и Th3 — на рис. 1, б. Резисторы и конденсаторы, показанные на рисунке, предназначены для ограничения тока управления искорости нарастания напряжения dv/dt (снабберная цепочка RSCS ).
Рис. 1. Схемы подключения драйверов МОС30хх
Контроллеры SEMIKRON отличаются от аналогичных изделий тем, что они являются полностью законченными изделиями, предназначенными для управления тиристорами, соединенными в определенной конфигурации: полумостовой, мостовой, 3-фазной мостовой. Контроллеры SKHIT 01 представляют собой печатные платы, а драйверы серии SKPC и RT имеют модульное исполнение, причем конструктивно они согласованы с тиристорными модулями SEMIPACK (по подключению и установочным размерам), что обеспечивает простое и надежное соединение.
Контроллеры SKHIT 01 представляют собой печатные платы, а драйверы серии SKPC и RT имеют модульное исполнение, причем конструктивно они согласованы с тиристорными модулями SEMIPACK (по подключению и установочным размерам), что обеспечивает простое и надежное соединение.
SKHIT 01 — драйвер 3-фазного тиристорного моста
Драйвер SKHIT 01 предназначен для управления 3-фазным полууправляемым тиристорным мостом. Его структурная схема и схема подключения показаны на рис.2,а внешний вид — на рис.3. Как видно из рисунка, конструкция драйвера предусматривает его вертикальную установку на печатную плату при помощи пайки.
Основные технические характеристики драйвера SKHIT 01:
- максимальное входное напряжение — 530 В;
- выходной ток — 400 мА;
- питание — 15 В, 150 мА;
- ток управления — 10 мА;
- напряжение изоляции — 2500 В.
Одной из самых серьезных проблем, возникающих при включении мощного преобразовательного устройства, является ограничение тока заряда электролитических конденсаторов, подключенных после выпрямительного моста к шине питания. Большие пусковые токи не только перегружают питающую сеть и могут вызвать срабатывание защитных устройств, они еще и резко сокращают срок службы электролитических конденсаторов.
Большие пусковые токи не только перегружают питающую сеть и могут вызвать срабатывание защитных устройств, они еще и резко сокращают срок службы электролитических конденсаторов.
Рис. 2. Структурная схема (а) и схема подключения (b) драйвера SKHIT 01
Рис. 3. Внешний вид платы драйвера SKHIT 01
При невысоких мощностях нагрузки эта проблема обычно решается с помощью резистора «предварительного заряда» (precharge) и реле, замыкающего его после окончания процесса заряда. С увеличением мощности реализация такой схемы становится все более сложной, кроме того, надежность мощных контакторов сравнительно невелика, поэтому для заряда конденсаторов силовой шины питания обычно используются тиристорные выпрямители с фазовым управлением. Специально для обеспечения плавного заряда конденсаторов шины питания фирмой International Rectifier разработан интегральный драйвер IR1110 — контроллер «плавного запуска» (Soft Start Controller), упрощенная схема подключения которого приведена на рис. 4. Микросхема IR1110 выпускается в корпусе MQFP-64. Она способна управлять 3-фазным полууправляемым тиристорным мостом и обеспечивает следующие режимы работы:
4. Микросхема IR1110 выпускается в корпусе MQFP-64. Она способна управлять 3-фазным полууправляемым тиристорным мостом и обеспечивает следующие режимы работы:
- регулирование напряжения шины питания;
- возможность работы с однофазной и трехфазной сетью напряжением 115/230/380/460/575 В;
- возможность программирования характеристики нарастания напряжения;
- защита от короткого замыкания по шине питания;
- формирование сигнала неисправности.
SEMIKRON предлагает свой вариант решения задачи (см. рис. 2, б). После подачи питания происходит заряд конденсатора С через выпрямительные диоды D1 — D3 и резистор Rcharge. После окончания процесса заряда включается тиристорный выпрямитель Th2— Th4, управляемый драйвером SKHIT 01, и формируется сигнал, разрешающий подключение нагрузки. Преимуществом данной схемы является отсутствие прерывания тока тиристорами и, соответственно, низкий уровень излучаемых в сеть помех. Такая схема проще в реализации, а наличие трех дополнительных маломощных диодов практически не влияет на стоимость изделия. В отличие от схемы с контроллером IR1110, вслучае использования драйвера SKHIT01 требуется минимальное количество внешних элементов.
В отличие от схемы с контроллером IR1110, вслучае использования драйвера SKHIT01 требуется минимальное количество внешних элементов.
Рис. 4. Схема подключения (а) и внешний вид платы IRMDSS1 (б) с драйвером IR1110 и тиристорным выпрямителем
На рис. 2, а приведена структурная схема драйвера SKHIT 01. Десятичный счетчик (5), на вход которого поступают тактовые импульсы с генератора (4), формирует три импульсных, сдвинутых по фазе напряжения с частотой 10 кГц и коэффициентом заполнения около 0,1. Фазовый сдвиг импульсных последовательностей определяется сдвигом фаз питающего напряжения L1 — L3. Далее импульсы через компараторы-усилители (6) и ограничительные резисторы подаются на управляющие электроды тиристоров. Если напряжение, приложенное к тиристорам, отрицательно (линейное напряжение L1 — L3) или отсутствует сигнал разрешения (строб), то сигналы управления тиристорами не проходят.
Потенциал точки соединения катодов тиристоров (+UG) близок к выходному напряжению выпрямительного моста и не совпадает с потенциалом общего сигнального провода.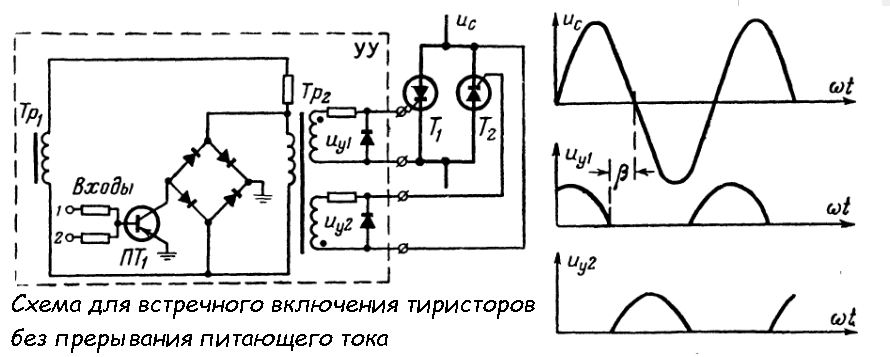 Согласование потенциалов осуществляется с помощью гальванически изолированного DC/DC-конвертора (1). Для включения драйвера служит сигнал «строб», разрешающий или запрещающий прохождение управляющих импульсов на выход устройства.
Согласование потенциалов осуществляется с помощью гальванически изолированного DC/DC-конвертора (1). Для включения драйвера служит сигнал «строб», разрешающий или запрещающий прохождение управляющих импульсов на выход устройства.
Контроллеры управления тиристорными модулями SKPC
Контроллеры SKPC представляют новое поколение модулей управления SEMI-PCM (Semikron Power Control Modules), разработанных английским отделением фирмы SEMIKRON. Модули SKPC 100 предназначены для совместной работы с управляемыми тиристорными выпрямителями в 2 режимах: с контролем нулевого перехода (SKPC 100Z) и с непосредственным управлением фазным углом. Данные компоненты позволяют создавать твердотельные реле большой мощности для различных применений, где требуется коммутация переменного тока или управление мощностью нагрузки. Модули SKPC в первую очередь предназначены для применения в устройствах с большими значениями коммутируемых токов и индуктивным характером нагрузки.
Основные особенности контроллеров SKPC:
- уровень сигнала управления — TTL, CMOS;
- гальваническая изоляция сигнала управления;
- удовлетворяют требованиями стандартов UL, CSA, VDE;
- согласованы по установочным размерами подключению с тиристорными модулями SEMIPACK 1 — SEMIPACK 4.

Контроллер SKPC 200 предназначен для управления модулями тиристор/тиристор вразличных конфигурациях, его структурная схема и внешний вид показаны на рис.5 и 6. Нарис. 7 приведены варианты соединения тиристоров в модуле, с которыми может работать SKPC 200, — коммутатор переменного тока (7, а) и мостовые схемы (7, b и с). Основные особенности контроллера SKPC 200:
Таблица 1. Функциональное назначение модулей SKPC
Таблица 2. Основные технические характеристики контроллеров SKPC 100/200:
- встроенный трансформатор (Тр) источника питания может быть подключен к отдельной сети 220 В, что позволяет устройству использовать широкий диапазон напряжений;
- защита от короткого замыкания;
- встроенный операционный усилитель и источник опорного напряжения для выработки сигнала управления в замкнутой системе.
Рис. 5. Структурная схема SKPC 200
Рис. 6. Внешний вид модуля SKPC 200
Рис. 7. Конфигурации схем соединения тиристоров
На рис. 8 показан внешний вид модулей управления, разработанных и производимых испанским отделением SEMIKRON. Далее в тексте приведено краткое описание данных модулей.
8 показан внешний вид модулей управления, разработанных и производимых испанским отделением SEMIKRON. Далее в тексте приведено краткое описание данных модулей.
Рис. 8. Внешний вид модулей для управления тиристорными мостами серий RT, МР, APTT
RT380M B2C — регулятор фазового угла для управления тиристорным мостом/полумостом в конфигурации В2С c контролем нулевого перехода
Область применения: регулировка освещения, температуры, скорости вращения двигателей постоянного тока, асинхронных двигателей, управление электрохимическими процессами.
Основные особенности:
- напряжение питания — 50/60 Гц, 220/380 В;
- напряжение управления — 0…5/0…10 В;
- встроенный источник питания 5 В;
- напряжение изоляции — 4 кВ;
- согласован по электрическим характеристикам и конструкции со всеми тиристорными модулями SEMIKRON.
RT380T — аналоговый контроллер 3-фазного тиристорного моста в конфигурациях В6С, B6HK, B6HKF
Область применения: регулировка мощности 3-фазной нагрузки.
Основные особенности:
- напряжение питания — 50/60 Гц, 220/380 В;
- работа на индуктивную нагрузку с
=0,2;
- напряжение управления — 0…5/0…10 В;
- встроенный источник питания 5 В, 100 мА;
- напряжение изоляции — 4 кВ;
- согласован по электрическим характеристикам и конструкции со всеми тиристорными модулями SEMIKRON.
MP380T — микропроцессорный контроллер 3-фазного тиристорного моста
Область применения: регулировка мощности 3-фазной нагрузки.
Основные особенности:
- напряжение питания — 50/60 Гц, 220/380 В с автоматическим выбором диапазона;
- работа на индуктивную нагрузку с
=0,2;
- напряжение управления — 0…5/0…10В, 0…20/4…20 мА;
- программируемый режим пуска и остановки;
- контроль обрыва фазы и правильности чередования фаз;
- защита от перегрева;
- режим ограничения тока нагрузки;
- напряжение изоляции — 4 кВ;
- управление от РС по протоколу RS485.
RT120MC — однофазный регулятор для управления АС-ключом (W1C) с обратной связью по току или напряжению
Область применения: стабилизация тока или напряжения нагрузки.
Основные особенности:
- напряжение питания — 50/60 Гц, 110/220/380 В;
- работа на индуктивную нагрузку с
=0,2;
- напряжение управления — 0…5 В, 0…20 мА, 4…20 мА;
- программируемый режим плавного пуска/остановки;
- режим ограничения тока или стабилизации напряжения;
- напряжение изоляции — 4 кВ.
APTT840/841 — однофазный регулятор для управления АС-ключом (W1C) и полумостом (В2С) c контролем нулевого перехода (840) и без контроля (841)
Область применения: регулировка мощности однофазной нагрузки, коррекция коэффициента мощности.
Основные особенности:
- напряжение питания — 50/60 Гц, 220/380 В;
- напряжение управления — 12 В;
- напряжение изоляции — 4 кВ.

SKW3 ZC — контроллер для управления 3-фазным АС-коммутатором c контролем нулевого перехода
Область применения: коммутация 3-фазной нагрузки.
Основные особенности:
- напряжение питания — 50/60 Гц, 230/400 В;
- напряжение управления — 8…10 В;
- встроенный источник питания 12 В;
- напряжение изоляции — 4 кВ;
- согласован по электрическим характеристикам и конструкции со всеми тиристорными модулями SEMIKRON.
SKTT6 — контроллер для управления 3-фазным АС коммутатором
Область применения: коммутация 3-фазной нагрузки.
Основные особенности:
- напряжение питания — 50/60 Гц, 230/400 В;
- напряжение управления — 6…30 В;
- встроенный источник питания 12 В;
- напряжение изоляции — 4 кВ;
- согласован по электрическим характеристикам и конструкции со всеми тиристорными модулями SEMIKRON.
Заключение
Фирма SEMIKRON стремится максимально обеспечить потребности потребителей полупроводниковых компонентов высокой мощности и необходимых им аксессуаров: теплоотводов, вентиляторов, снабберныx цепей, элементов для защиты полупроводников от переходных перенапряжений. Это позволяет разработчику выбрать все необходимые для решения задачи компоненты среди продукции одной фирмы.
Это позволяет разработчику выбрать все необходимые для решения задачи компоненты среди продукции одной фирмы.
Основная доля продукции SEMIKRON предназначена для создания мощных преобразовательных устройств: приводов, систем индукционного нагрева, сварочного оборудования и т. д. Одной из проблем, с которой неизбежно сталкивается разработчик данного оборудования, является плавная подача питания. Выпуск компонентов, позволяющих решить данную задачу, позволяет сократить стоимость разработки, повысить надежность работы изделия.
Тиристоры остаются элементами, достаточно широко применяемыми в технике, и наличие специализированных контроллеров для управления ими — одна из сильных сторон продукции SEMIKRON. На рис.9 приведены некоторые практические схемы, в которых могут быть использованы тиристоры, управляемые драйверами SEMIKRON: а— регулятор тока однофазной нагрузки, b— мостовой регулятор мощности нагрузки постоянного тока, с — коммутатор трехфазной нагрузки, d — система термостабилизации.
Рис. 9. Практические схемы включения контроллеров SKPC
На рис. 10 показано одно из готовых изделий серии SEMISTACK — сборка, содержащая полностью законченную конструкцию 3-фазного выпрямителя с модулями SEMIPACK SKKT 57/12, драйвером 3-фазного тиристорного моста RT390T, теплоотводом Р3/250, вентилятором SKF3-230 и разъемами для подключения силовых и контрольных цепей. Модуль разработан и изготовлен специально для обучения специалистов методам расчета и конструирования тиристорных преобразователей большой мощности.
Рис. 10. Демонстрационная сборка SEMITEACH с модулями SKКТ 57/12 и драйвером RT380T
Литература
- SCR/Thyristor Trigger Module SKHIT 01. Semikron Elektronik GmbH.
- Thyristor Phase Angle Trigger Module SKPC 200. Semikron Elektronik GmbH.
- IRMDSS 1 — IR1110 Soft Start IC Reference Design Kit. International Rectifier Data Sheet No. PD60164.
- Thyristor Power Electronics Teaching System.
 Application Note.
Application Note.
приложений SCR | Переключатель, управление питанием переменного и постоянного тока, защита от перенапряжения Protec
В этом руководстве мы узнаем о некоторых широко известных приложениях SCR. Приложения SCR: коммутация, управление мощностью в цепях переменного и постоянного тока, защита от перенапряжения и т. д. ток затвора, а также способный переключать высокие напряжения, позволяет использовать SCR или тиристор в различных приложениях.
Эти приложения включают в себя переключение, выпрямление, регулирование, защиту и т. д. SCR используются для управления бытовой техникой, включая освещение, контроль температуры, регулирование скорости вентилятора, обогрев и активацию сигнализации.
В промышленности тиристоры используются для управления скоростью двигателя, зарядкой аккумулятора и преобразованием энергии. Некоторые из них объясняются ниже.
SCR как коммутатор Операция переключения является одним из наиболее важных применений SCR. SCR часто используется в качестве твердотельного реле и имеет больше преимуществ, чем электромагнитные реле или переключатели, поскольку в SCR нет движущихся частей.
SCR часто используется в качестве твердотельного реле и имеет больше преимуществ, чем электромагнитные реле или переключатели, поскольку в SCR нет движущихся частей.
На приведенном ниже рисунке показано применение тиристора в качестве переключателя для включения и выключения питания, подаваемого на нагрузку. Мощность переменного тока, подаваемая на нагрузку, управляется путем подачи чередующихся импульсов запуска на SCR. Резисторы R1 и R2 защищают диоды D1 и D2 соответственно. Резистор R ограничивает ток затвора.
Во время положительного полупериода входа SCR1 смещен в прямом направлении, а SCR2 смещен в обратном направлении. Если переключатель S замкнут, ток затвора подается на SCR1 через диод D1, и, следовательно, SCR1 включается. Следовательно, ток течет к нагрузке через SCR1.
Аналогично, во время отрицательного полупериода сигнала SCR2 смещен в прямом направлении, а SCR1 смещен в обратном направлении. Если ключ S замкнут, ток затвора течет к SCR2 через диод D2. Следовательно, SCR2 включается, и через него протекает ток нагрузки.
Следовательно, SCR2 включается, и через него протекает ток нагрузки.
Таким образом, управляя переключателем S, ток нагрузки можно регулировать в любом желаемом положении. Замечено, что этот переключатель обрабатывает ток в несколько миллиампер для управления током в несколько сотен ампер в нагрузке. Так что этот способ переключения более выгоден, чем механическое или электромеханическое переключение.
Вернуться к началу
Управление мощностью с помощью тиристоровТиристоры способны управлять мощностью, передаваемой на нагрузку. Часто требуется изменять мощность, подаваемую на нагрузку, в зависимости от требований нагрузки, таких как регулирование скорости двигателя и регуляторы освещенности.
В таких условиях изменение мощности с помощью обычных регулируемых потенциометров не является надежным методом из-за больших потерь мощности. Для уменьшения рассеиваемой мощности в цепях большой мощности тиристоры являются лучшим выбором в качестве устройств управления мощностью.
В цепях переменного тока управление фазой является наиболее распространенной формой управления мощностью SCR. При управлении фазой путем изменения угла срабатывания альфа на клемме затвора достигается управление мощностью.
На рисунке ниже показана полная схема управления волной переменного тока, иллюстрирующая метод управления фазой. Учтите, что питание переменного тока подается на два встречно-параллельных тиристора. Во время положительного полупериода сигнала SCR1 проводит, в то время как в отрицательном полупериоде SCR2 проводит, когда к ним применяются соответствующие стробирующие импульсы.
Путем изменения угла включения соответствующих тиристоров изменяется время включения. Это приводит к изменению мощности, потребляемой нагрузкой. На приведенном ниже рисунке тиристоры срабатывают при задержанных импульсах (что означает увеличение угла открытия), что приводит к уменьшению мощности, подаваемой на нагрузку.
Основным преимуществом фазового управления является то, что тиристоры автоматически выключаются при каждом текущем нулевом положении переменного тока. Следовательно, для выключения тиристора не требуется никаких коммутационных цепей.
Вернуться к началу
Управление мощностью постоянного тока с помощью SCRВ случае цепи постоянного тока мощность, подаваемая на нагрузку, изменяется путем изменения продолжительности включения и выключения тиристоров. Этот метод называется прерывателем или управлением ON-OFF. На рисунке ниже показано простое управление нагрузкой ВКЛ-ВЫКЛ с помощью SCR.
Также возможно переключение тиристора с определенной частотой срабатывания, чтобы варьировался ток, протекающий к нагрузке. Примером такой схемы является схема SCR на основе ШИМ для создания переменного выхода на нагрузку.
Можно производить переменную мощность постоянного тока для нагрузки, используя схемы выпрямителя с фазовым управлением. Средняя мощность постоянного тока, подаваемая на нагрузку, контролируется моментом включения тиристора. Некоторые из этих схем выпрямителя приведены ниже.
Средняя мощность постоянного тока, подаваемая на нагрузку, контролируется моментом включения тиристора. Некоторые из этих схем выпрямителя приведены ниже.
На приведенной ниже схеме показана схема однофазного однополупериодного выпрямителя с использованием SCR. Диод последовательно с переменным резистором подключен к затвору, который отвечает за запуск SCR.
- Во время отрицательного полупериода входного сигнала переменного тока тиристор смещен в обратном направлении. Следовательно, ток через нагрузку не течет.
- Во время отрицательного полупериода входа SCR смещен в прямом направлении. Если резистор изменяется таким образом, что на затвор подается минимальный ток срабатывания, то SCR включается. Следовательно, ток начинает течь к нагрузке.
- Если ток затвора выше, напряжение питания, при котором SCR включается, будет меньше. Угол, при котором SCR начинает проводить ток, называется углом зажигания.
 Для этой схемы выпрямителя угол открытия можно изменять только в течение положительного полупериода.
Для этой схемы выпрямителя угол открытия можно изменять только в течение положительного полупериода. - Таким образом, изменяя угол открытия или ток затвора (путем изменения сопротивления в этой цепи), можно заставить SCR проводить часть или полный положительный полупериод, так что средняя мощность, подаваемая на нагрузку, будет варьироваться.
В двухполупериодном выпрямителе выпрямляются как положительные, так и отрицательные волны входного питания. Следовательно, по сравнению с однополупериодным выпрямителем, среднее значение постоянного напряжения выше, а уровень пульсаций меньше. На приведенном ниже рисунке показана схема двухполупериодного выпрямителя, состоящая из двух тиристоров, соединенных с трансформатором с центральным отводом.
• Во время положительного полупериода входа SCR1 смещен в прямом направлении, а SCR2 смещен в обратном направлении. При подаче соответствующего сигнала затвора SCR1 включается, и, следовательно, через него начинает протекать ток нагрузки.
• Во время отрицательного полупериода входа SCR2 смещен в прямом направлении, а SCR1 смещен в обратном направлении. При срабатывании затвора SCR2 включается, и, следовательно, ток нагрузки протекает через SCR2.
• Таким образом, изменяя ток срабатывания тиристоров, можно изменять среднюю мощность, подаваемую на нагрузку.
Двухполупериодный мостовой выпрямительВместо трансформатора с отводом от середины можно также использовать четыре тиристора в мостовой конфигурации для получения двухполупериодного выпрямления. Во время положительного полупериода входа SCR1 и SCR2 находятся в проводимости. Во время отрицательного полупериода SCR3 и SCR4 находятся в проводимости. Угол проводимости каждого тиристора регулируется путем изменения соответствующих токов затвора. И, следовательно, выходное напряжение на нагрузке варьируется.
Вернуться к началу
Защита от перенапряжения с помощью SCR Благодаря быстрому переключению SCR, одним из распространенных применений SCR является то, что его можно использовать в качестве защитного устройства. Схема, используемая для защиты от перенапряжения, называется схемой Crowbar.
Схема, используемая для защиты от перенапряжения, называется схемой Crowbar.
На рисунке ниже показана схема лома с использованием SCR. Эта цепь лома подключается к цепи или нагрузке, которую необходимо защитить. Эта схема состоит из тринистора, который запускается стабилитроном. Этот стабилитрон подобран таким образом, что при нормальных условиях работы он действует как разомкнутый переключатель.
Таким образом, напряжение на резисторе равно нулю, и, следовательно, SCR остается в выключенном состоянии.
Всякий раз, когда напряжение источника питания превышает указанные пределы, стабилитроны начинают открываться, и на резисторе появляется достаточное напряжение. Это переводит SCR в режим проводимости. Падение напряжения на SCR уменьшается, поскольку он находится в режиме проводимости, и, таким образом, нагрузка защищена от перенапряжения.
Вернуться к началу
SCR Тиристорное управление фазой | Цепь
Хотите создать сайт? Найдите бесплатные темы и плагины WordPress.
Управление фазой является наиболее распространенным методом, используемым для управления мощностью тиристоров. Там, где используются методы управления фазой, используется только часть волны переменного тока. Тиристорные устройства блокируют проводимость до тех пор, пока не перейдут во включенное состояние.
Срабатывание тиристора может произойти в любой момент данного полупериода. Чем дольше задержка срабатывания, тем ниже будет напряжение нагрузки.
Использование тиристора, такого как тиристор, тиристор GTO или симистор с подходящей схемой запуска, позволит бесступенчато изменять напряжение нагрузки от нуля до максимально доступного значения.
Напряжение нагрузки фактически регулируется углом открытия тиристора α. Угол срабатывания является показателем задержки срабатывания и измеряется в электрических градусах. Когда напряжение нагрузки максимально, угол срабатывания равен нулю.
Методы управления фазой могут одинаково хорошо применяться к нагрузкам постоянного и переменного тока, питаемым от источника переменного тока. В случае нагрузки постоянного тока изменяется среднее напряжение нагрузки, а в случае нагрузки переменного тока изменяется действующее значение напряжения нагрузки. В обоих случаях это приводит к изменению средней мощности нагрузки.
В случае нагрузки постоянного тока изменяется среднее напряжение нагрузки, а в случае нагрузки переменного тока изменяется действующее значение напряжения нагрузки. В обоих случаях это приводит к изменению средней мощности нагрузки.
Рисунок 1 отображает типичные формы сигналов напряжения нагрузки для управляемой нагрузки постоянного тока, где используются методы управления фазой.
Рисунок 1 Формы напряжения для нагрузки постоянного тока с фазовым управлением большой. Для малой мощности нагрузки α большой, а θ маленький. По мере увеличения угла триггера угол проводимости уменьшается. Для цепей с однофазным питанием и резистивной нагрузкой:
На рисунке 2 показаны типичные формы сигналов для ситуации, когда методы управления фазой используются для управления мощностью нагрузки переменного тока. Принципы идентичны принципам приложения постоянного тока, с той лишь разницей, что ток нагрузки является двунаправленным.
Рисунок 2 Осциллограммы напряжения для нагрузки переменного тока с фазовым управлением
Преимущества фазового управления:
- Широкий диапазон применений, от нагрузок очень низкой до очень высокой мощности
- Высокая эффективность
- Небольшой размер, компактное оборудование
- Умеренный расходы.
Управление фазой имеет два основных недостатка:
- «Срезанная» форма волны создает гармоники (кратные частоте сети), которые отражаются обратно в систему питания. Эти гармоники могут в экстремальных случаях мешать другому оборудованию.
- Быстрое переключение тиристоров вызывает очень быстрый рост тока нагрузки, вызывая высокочастотные колебания. Частота этих колебаний обычно находится в диапазоне AM-вещания и может вызывать помехи для оборудования связи, работающего на этих частотах. Колебания, называемые радиочастотными помехами (РЧП), могут излучаться напрямую, но также могут проникать в систему электроснабжения.
 РЧ-помехи, генерируемые тиристорными цепями, увеличиваются по мере того, как угол срабатывания приближается к 90°. Она минимальна, когда срабатывание происходит при 0° или 180°. Возврат РЧ-помех в систему питания можно предотвратить с помощью цепей подавления РЧ-помех, как показано на Рисунок 3 .
РЧ-помехи, генерируемые тиристорными цепями, увеличиваются по мере того, как угол срабатывания приближается к 90°. Она минимальна, когда срабатывание происходит при 0° или 180°. Возврат РЧ-помех в систему питания можно предотвратить с помощью цепей подавления РЧ-помех, как показано на Рисунок 3 .
Рис. 3 Подавление РЧ-помех
На радиочастотах конденсатор обеспечивает путь с низким импедансом для возврата РЧ-помех, генерируемых тиристором, на тиристор. Для частот сети питания конденсатор имеет высокое сопротивление и не влияет на работу электрооборудования.
Катушка индуктивности создает путь с высоким импедансом для высокочастотных колебаний, пытающихся проникнуть в источник питания. На частотах сети он обеспечивает минимальный импеданс и не влияет на работу электрооборудования.
Однофазный однополупериодный управляемый выпрямитель
Функция этой схемы заключается в управлении средним значением мощности в нагрузке постоянного тока, питаемой от источника переменного тока. Это достигается за счет управления средним значением напряжения нагрузки с помощью методов фазового управления.
Это достигается за счет управления средним значением напряжения нагрузки с помощью методов фазового управления.
Конфигурация схемы аналогична однофазному однополупериодному выпрямителю, основное отличие состоит в том, что диод заменен тринисторным тиристором. Также должна быть включена триггерная схема для управления SCR. Возможны многие варианты схемы триггера. Будет обсуждаться только одна триггерная схема.
Работа
В схеме этого типа необходимо сконфигурировать схему запуска так, чтобы импульсы запуска могли изменяться от начала положительного полупериода до конца полупериода. Импульсы должны быть синхронизированы с сетью, чтобы при заданной настройке на РВ 1 задержка запуска одинакова в каждом положительном полупериоде.
В схеме Рисунок 4 , D 1 , R 1 и ZD 1 обеспечивают регулируемое питание для схемы запуска UJT. Цепь триггера подключена таким образом, что при срабатывании тринистора триггерная цепь эффективно замыкается накоротко из-за очень малого прямого падения напряжения на проводящем тринисторе. В результате получается:
В результате получается:
- Только один запускающий импульс в каждом положительном полупериоде
- Время, необходимое для того, чтобы конденсатор достиг пикового значения напряжения и, следовательно, заставил UJT вызвать срабатывание SCR, было одинаковым в каждом положительном полупериоде.
. полупериода, что приводит к снижению среднего напряжения нагрузки. Угол срабатывания регулируется настройкой на RV 9.0223 1 . По мере увеличения RV 1 постоянная времени в цепи запуска увеличивается, увеличивая угол запуска. Точно так же, если значение параметра RV 1 уменьшится, постоянная времени и угол срабатывания уменьшатся.
Когда RV 1 имеет минимальное значение, угол срабатывания будет равен нулю, а напряжение нагрузки будет максимальным.
Это значение идентично полученному от неуправляемого однофазного однополупериодного выпрямителя.
Когда RV 1 установлено максимальное значение, угол срабатывания будет равен 180°, а напряжение нагрузки будет равно нулю. Для углов срабатывания от 0° до 180° напряжение нагрузки определяется из:
Пример 1 входное напряжение составляет 240 В, а угол срабатывания установлен на 60°.
Пиковое обратное напряжение, которому подвергается тиристор, также важно и определяется из:
Пример 2
В Пример 1 входное напряжение переменного тока составляло 240 В. СКР.
Управляемый однофазный однополупериодный выпрямитель имеет те же недостатки, что и неуправляемый однофазный однополупериодный выпрямитель. Наиболее важными из них являются:
- Низкий выход постоянного тока для данного входа переменного тока
- Низкая частота пульсаций и «грубая» форма волны напряжения нагрузки
- Насыщение сердечника питающего трансформатора при высоком токе нагрузки.

Осциллограммы
На рис.
Рисунок 5 Форма волны однофазного однополупериодного управляемого выпрямителя
Из-за характера формы волны напряжения нагрузки и других недостатков однофазный однополупериодный управляемый выпрямитель находит мало применений в промышленности. Напротив, широко используются многофазные однополупериодные управляемые выпрямители.
Двухполупериодный управляемый выпрямитель — однофазный
Эта схема выпрямителя устраняет основные недостатки однополупериодного управляемого выпрямителя. Единственный способ добиться дальнейшего улучшения характеристик – это использовать многофазные выпрямители.
Однофазный двухполупериодный управляемый выпрямитель представляет собой мостовой выпрямитель, однако он может иметь одну из следующих форм:
- Два тринистора и два диода — полууправляемый мост
- Четыре SCR — полностью управляемый мостик.
Здесь будет обсуждаться только полууправляемый мост, потому что полностью управляемый мост не дает преимуществ при питании резистивных нагрузок, но требует более сложной схемы запуска. Полностью управляемые мосты используются в таких приложениях, как управление скоростью двигателя постоянного тока, где требуется рекуперативное торможение.
Полууправляемый мостовой выпрямитель
Полууправляемый мост показан на Рис. 6.
и D 1 имеют обратное смещение. В следующем полупериоде ток нагрузки подается через SCR 2 и D 1 с тиристором 1 и D 2 с обратным смещением. Конечно, ток нагрузки не может протекать до тех пор, пока соответствующий SCR не перейдет во включенное состояние.
Тиристоры и диоды в этой цепи работают с 50-процентным рабочим циклом; то есть они проводят только 50 процентов времени. Этот факт можно принять во внимание с некоторой степенью осторожности при выборе номинального тока для тринисторов и диодов для конкретного применения.
Схема запуска в этой схеме настроена таким образом, что каждый SCR будет получать несколько импульсов запуска в каждом полупериоде. Однако обычно это не представляет проблемы, поскольку запускающий импульс не влияет на проводящий тиристор или на тиристор, смещенный в обратном направлении.
Подобно выпрямителю с однополупериодным управлением, выходное напряжение этой схемы регулируется потенциометром в цепи запуска.
Когда α = 0°, напряжение нагрузки максимальное, и:
Когда α = 180°, напряжение нагрузки равно нулю. Для углов запуска от 0° до 180° напряжение нагрузки может быть определено из следующего выражения:
Пример 3
Определите напряжение нагрузки постоянного тока, подаваемое от однофазного полууправляемого мостового выпрямителя, где вход переменного тока напряжение составляет 240 В, а угол срабатывания установлен на 60°.
Тиристоры и диоды в этой схеме подвергаются тому же PRV, что и диоды в однофазном неуправляемом мостовом выпрямителе, то есть:
Пример 4
6 входное напряжение переменного тока составляет 240 В. Определите требуемый номинал PRV тиристоров и диодов.
Определите требуемый номинал PRV тиристоров и диодов.
Обратите внимание, что выходное напряжение для этой схемы вдвое больше, чем у однополупериодного выпрямителя при том же угле запуска. Управляемый мостовой выпрямитель лучше подходит и обычно используется для питания нагрузок малой и средней мощности.
Схема в Рисунок 6 можно изменить, чтобы настроить схему запуска так, чтобы в каждом полупериоде подавался только один запускающий импульс, как в Рисунок 7 . Оба SCR по-прежнему срабатывают одновременно; однако включится только SCR, смещенный в прямом направлении.
Рисунок 7 Однофазный полууправляемый мостовой выпрямитель с модифицированной схемой запуска
Осциллограммы
Типовые осциллограммы для однофазной полууправляемой мостовой выпрямительной схемы, где угол срабатывания установлен на 60° , показаны на Рисунок 8 .
