
РадиоКот :: Частотный преобразователь
РадиоКот >Схемы >Цифровые устройства >Защита и контроль >Частотный преобразователь
Всем здравствуйте. Вот решил написать статейку про асинхронный привод и преобразователь частоты, который я изготавливал. Моему товарищу надо было крутить пилораму, и крутить хорошо. А сам я занимался импульсной электроникой и сразу предложил ему частотник. Да, можно было купить фирмовый преобразователь, и мне приходилось с ними сталкиваться, параметрировать, но захотелось своего, САМОДЕЛАШНОГО! Да и привод циркулярки к качеству регулирования скорости не критичен, только вот к ударным нагрузкам и к работе в перегрузе должен быть готов. Также максимально-простое управление с помощью пары кнопок и никаких там параметров.
Основные достоинства частотнорегулируемого привода (может для кого-то повторюсь):
Формируем из одной фазы 220В полноценные 3 фазы 220В со сдвигом 120 град., и имеем полный вращающий момент и мощность на валу.
Отсутствует замагничивание и лишний нагрев двигателя, как при использовании конденсаторов.
Возможность легко регулировать скорость и направление, если необходимо.
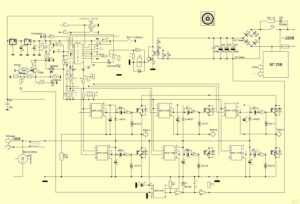
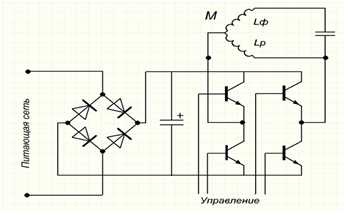
Вот какая схемка собралась:
3-фазный мост на IGBT транзисторах c обратными диодами (использовал имеющиеся G4PH50UD) управляется через оптодрайвера HCPL 3120 (бутстрепная схема запитки) микроконтроллером PIC16F628A. На входе гасящий конденсатор для плавного заряда электролитов DC звена. Затем его шунтирует реле и на микроконтроллер одновременно приходит логический уровень готовности. Также имеется триггер токовой защиты от к.з. и сильной перегрузки двигателя. Управление осуществляют 2 кнопки и тумблер изменения направления вращения.
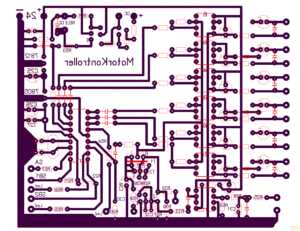
Силовая часть мною была собрана навесным монтажом. Плата контроллера отутюжина вот в таком виде:
Параллельные резисторы по 270к на проходных затворных конденсаторах (забыл под них места нарисовать) припаял сзади платы, потом хотел заменить на смд но так и оставил.
Есть внешний вид этой платы, когда уже спаивал:
С другой стороны
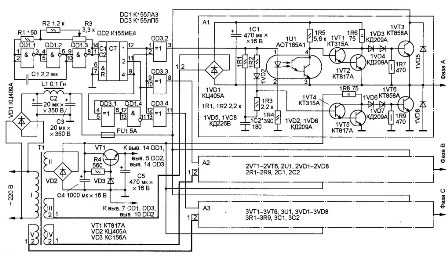
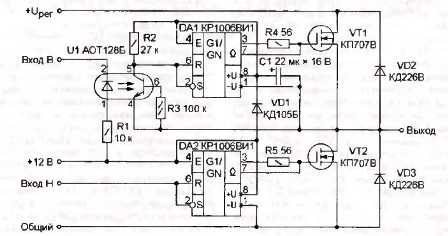
Для питания управления был собран типовой импульсный обратноходовой (FLAYBACK) блок питания.
Его схема:
Можно использовать любой блок питания на 24В, но стабилизированный и с запаздыванием пропадания выходного напряжения от момента пропажи сетевого на пару тройку секунд. Это необходимо чтобы привод успел отключиться по ошибке DC. Добивался установкой электролита С1 большей ёмкости.
Теперь о самом главном…о програме микроконтроллера. Программирование простых моргалок для меня сложности не представляло, но тут надо было поднатужить мозги. Порыскав в нете, я не нашёл на то время подходящей информации. Мне предлагали поставить и специализированные контроллеры, например контроллер фирмы MOTOROLA MC3PHAC. Но хотелось, повторюсь, своего. Принялся детально разбираться с ШИМ модуляцией, как и когда нужно открыть какой транзистор… Открылись некие закономерности и вышел шаблон самой простой программы отработки задержек, с помощью которой можно выдать удовлетворительно синусовую ШИМ и регулировать напряжение. Считать ничего контроллер конечно не успевал, прерывания не давали что надо и поэтому я идею крутого обсчёта ШИМ на PIC16F628A сразу отбросил. В итоге получилась матрица констант, которую отрабатывал контроллер. Они задавали и частоту и напряжение. Возился честно скажу, долго. Пилорама уже во всю пилила конденсаторами, когда вышла первая версия прошивки. Проверял всю схему сначала на 180 ватном движке вентиляторе. Вот как выглядела “экспериментальная установка”:
Первые эксперименты показали, что у этого проекта точно есть будущее.
Программа дорабатывалась и в итоге после раскрутки 4кВТ-ного движка её можно было собирать и идти на лесопилку.
Товарищ был приятно удивлён, хоть и с самого начала относился скептически. Я тоже был удивлён, т.к. проверилась защита от к.з. (случайно произошло в борно двигателя). Всё осталось живо. Двигатель на 1,5кВт 1440об/мин легко грыз брусы диском на 300мм. Шкивы один к одному. При ударах и сучках свет слегка пригасал, но двигатель не останавливался. Ещё пришлось сильно подтягивать ремень, т.к. скользил при сильной нагрузке. Потом поставили двойную передачу.
Сейчас ещё дорабатываю программу она станет еще лучше, алгоритм работы шим чуть сложнее, режимов больше, возможность раскручиваться выше номинала…а тут снизу та самая простая версия которая работает на пиле уже около года.
Её характеристики:
Выходная Частота: 2,5-50Гц, шаг 1,25Гц; Частота ШИМ синхронная, изменяющаяся. Диапазон примерно 1700-3300Гц.; Скалярный режим управления U/F, мощность двигателя до 4кВт.
Минимальная рабочая частота после однократного нажатия на кнопку ПУСК(RUN) – 10Гц.
При удержании кнопки RUN происходит разгон, при отпускании частота остаётся та, до которой успел разогнаться. Максимальная 50Гц- сигнализируется светодиодом. Время разгона около 2с.
Светодиод “готовность” сигнализирует о готовности к запуску привода.
Реверс опрашивается в состоянии готовности.
Режимов торможения и регулирования частоты вниз нет, но они в данном случае и не нужны.
При нажатии Стоп или СБРОС происходит остановка выбегом.
На этом пока всё. Спасибо, кто дочитал до конца.
Файлы:
Программа ШИММ1.0r для PIC16F628(A)
Плата управления в SPLANe
Все вопросы в Форум.
Как вам эта статья? | Заработало ли это устройство у вас? |
www.radiokot.ru
Частотный преобразователь своими руками – с асинхронным приводом
Частотный преобразователь своими руками

Частотный преобразователь своими руками — представляю вам небольшую статью о асинхронном двигателе и частотном преобразователе, который мне ранее приходилось делать. Вот и теперь потребовался хороший привод для циркулярной пилы. Конечно можно было бы взять в магазине фирменный частотник, но все-таки вариант самостоятельного изготовления оказался для меня наиболее приемлемым.
К тому же, качество регулировки скорости привода пилорамы не требовало абсолютной точности. Однако с нагрузками ударного типа и длительными перегрузками он должен справляться. К тому же хотелось сделать управление наиболее простым, без всяких там параметров, а просто установить пару кнопок.
Главные преимущества привода с регулировкой частоты:
- Создаем из однофазного напряжения 220v полновесные три фазы 220v, сдвиг у которых будет 120°, при этом получаем абсолютный вращательный момент с мощностью на валу
- Повышенный момент старта с плавным запуском без максимального пускового тока
- Нет сильного замагничивания и излишнего перегрева мотора, как это бывает когда применяются конденсаторы
- При необходимости можно свободно управлять скоростью вращения и менять направление
Ниже показана принципиальная схема устройства:
Трехфазный мост выполнен на гибридных IGBT транзисторах c диодами обратной проводимости. В целом это представляет собой бустрепное управление микроконтроллером PIC16F628A, осуществляемое с помощью специализированных оптодрайверов HCPL-3120. Во входном тракте установлен конденсатор гашения напряжения, выполняющего функцию мягкой зарядки электролитических конденсаторов в цепи постоянного напряжения.
Быстродействующая защита
Далее по схеме он зашунтирован электромагнитным реле, при этом на PIC16F628A подается цифровой логический уровень готовности. В схеме предусмотрена быстродействующая защита по току от короткого замыкания и критической перегрузке мотора, выполненная по триггерной схеме. Все это управляется при помощи двух кнопок и одного переключателя, который изменяет направление вращения вала.
Частотный преобразователь своими руками, в частности участок силовых напряжений был собран методом навесного монтажа, а контроллер размещен на печатной плате, которая показана ниже:
Постоянные резисторы с номиналом 270к, шунтирующие конденсаторы установленные в цепи затвора IGBT, запаял со стороны дорожек, так как упустил из виду сделать для них площадки. Их конечно можно заменить на smd.
Здесь показано фото печатной платы контроллера после распайки компонентов:

А это с противоположной стороны

Для подачи напряжения питания в модуль управления был изготовлен стандартный обратноходовой импульсный источник питания.
Принципиальная схема блока питания:
Чтобы изготовить частотный преобразователь своими руками в принципе можно использовать практически любой источник питания с выходным напряжением 24v. Однако, этот блок питания должен быть стабилизированный и с задержкой напряжения на выходе с момента исчезновения напряжения сети, хотябы в пределах 3-х секунд. Это обусловлено тем, что двигатель смог отключится в случае возникновения ошибки по DC. Достигается подбором электролитического конденсатора С1 с большим значением емкости.
Ну, а теперь нужно подробнее разобраться в самом важном компоненте данного устройства — в программе микроконтроллера. В интернете подходящей для меня информации по этому вопросу я не нашел, хотя были предложения установить специальные фирменные контроллеры. Но как я уже говорил, мне принципиально нужно было установить, что-то собственной разработки. Приступил во всех подробностях анализировать ШИМ модуляцию, в какое время и каким способом открыть определенный транзистор…
Программа формирования задержек
Выяснились некоторые закономерности и получился образец несложной программы формирования задержек. При ее использовании получается произвести достаточно хорошую синусоидальную ШИМ с возможностью изменять напряжение. Естественно контроллер делать какие либо вычисления не успевал, задержки не давали того эффекта, который был нужен. Следовательно, такой вариант обсчитывания ШИМ на микроконтроллере PIC16F628A я забраковал сразу.
В результате образовалась констант матрица, а ее уже отрабатывал PIC16F628A. Они формировали и диапазон частоты и напряжение питания. Конечно эта работа по созданию данного устройства несколько затянулась. Циркуляркой уже полным ходом пилили на конденсаторах, когда появился необходимый вариант прошивки. Первоначально тестировал схему на моторе от вентилятора, мощностью 180 Вт. Вот фото прибора на стадии экспериментальных работ:

Тестирование устройства
Чуть позже, в процессе испытания программа подвергалась усовершенствованию, а после запуска двигателя мощностью на 4 кВт я практически был удовлетворен итогом своей работы. Защита от короткого замыкания прекрасно срабатывает, полутора-киловаттный мотор на 1440об/мин с диском 300мм свободно справлялся с приличными брусками. Шкивы были установлены одинаковые, что на двигатель, что на вал циркулярки. При попадании пилы на сучок сетевое напряжение немного падало, хотя двигатель продолжал работать.
По ходу работы потребовалось немного натянуть ремень, поскольку при увеличении нагрузки он начинал скользить на шкиве. В дальнейшем применили двойную передачу. Но на этом решил не останавливаться, поэтому сейчас начал усовершенствовать программу, в итоге она будет значительно эффективней. Принцип работы ШИМ-контролера немного усложняется, появится больше режимов, появится ресурс раскручивания выше номинального значения.
В конце статьи файлы для того самого простого варианта устройства, которое прекрасно работает с циркулярной пилой уже больше года.
Характеристики:
- Частота на выходе: 2,5-50Гц, шаг 1,25Гц; Частота ШИМ-контроллера синхронная, с возможностью изменения. Диапазон частот в пределах 1750-3350Гц.; Скалярное управление частотным преобразователем, мощность мотора около 4кВт. Самая меньшая частота работы при разовом нажатии кнопки «Пуск» — составляет 10Гц.
- Во время удержании кнопки нажатой появляется разгоняющий момент, а когда кнопка отпускается, то частота буде той, до какой смог разогнаться. Частота по максимуму — 50Гц информирует светодиодный индикатор. Номинальное время разгоняющего момента составляет 2 секунды.
- Индикатор «Готов» сообщает о готовности устройства к старту двигателя.
Файлы:
Программа ШИММ1.0r для PIC16F628(A)
Плата управления в SPLANe
usilitelstabo.ru
Простой преобразователь частоты для асинхронного электродвигателя.
РадиоКот >Схемы >Питание >Преобразователи и UPS >Простой преобразователь частоты для асинхронного электродвигателя.
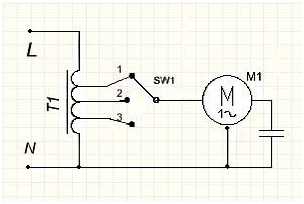
Итак коль уж асинхронный двигатель так распространён и трехфазная система напряжения созданная М. О. Доливо-Добровольским так удобна. А современная элементная база так хороша. То сделать преобразователь частоты –это лишь вопрос личного желания и некоторых финансовых возможностей. Возможно кто то скажет « Ну, зачем мне инвертор , я поставлю фазосдвигающий конденсатор и все решено» . Но при этом обороты не покрутишь и в мощности потеряешь и потом это не интересно.
Возьмём за основу – в быту есть однофазная сеть 220в, народный размер двигателя до 1 кВт. Значить соединяем обмотки двигателя треугольником. Дальше –проще, понадобится драйвер трехфазного моста IR2135(IR2133) выбираем такой потому, что он применяется в промышленной технике имеет вывод SD и удобное расположение выводов. Подойдёт и IR2132 , но у неё dead time больше и выхода SD нет. В качестве генератора PWM выберем микроконтроллер AT90SPWM3B – доступен, всем понятен, имеет массу возможностей и недорого стоит, есть простой программатор -https://real.kiev.ua/avreal/. Силовые транзисторы 6 штук IRG4BC30W выберем с некоторым запасом по току – пусковые токи АД могут превышать номинальные в 5-6 раз. И пока не ставим “тормозной” ключ и резистор, будем тормозить и намагничивать перед пуском ротор постоянным током, но об этом позже …. Весь процесс работы отображается на 2-х строчном ЖКИ индикаторе. Для управления достаточно 6 кнопок (частота +, частота -, пуск, стоп, реверс, меню).
Получилась вот такая схема.
Я вовсе не претендую на законченность конструкции и предлагаю брать данную конструкцию за некую основу для энтузиастов домашнего электропривода. Приведённые здесь платы были сделаны под имеющиеся в моём распоряжении детали.
Конструктивно инвертор выполнен на двух платах – силовая часть ( блок питания , драйвер и транзисторы моста , силовые клеммы) и цифровая часть (микроконтроллер + индикатор ). Электрически платы соединены гибким шлейфом. Такая конструкция выбрана для перехода в будущем на контроллер TMS320 или STM32 или STM8.
Блок питания собран по классической схеме и в комментариях не нуждается. Микросхема IL300 линейная опто развязка для управления током 4-20Ма. Оптроны ОС2-4 просто дублируют кнопки «старт, стоп, реверс» для гальванически развязанного управления. Выход оптрона ОС-1 «функция пользователя» (сигнализация и пр.)
Силовые транзисторы и диодный мост закреплены на общий радиатор. Шунт 4 витка манганинового провода диаметром 0.5мм на оправке 3 мм.
Сразу замечу некоторые узлы и элементы вовсе не обязательны. Для того что бы просто крутить двигатель , не нужно внешнее управление током 4-20 Ма. Нет необходимости в трансформаторе тока, для оценочного измерения подойдёт и токовый шунт. Не нужна внешняя сигнализация. При мощности двигателя 400 Вт и площади радиатора 100см2 нет нужды в термодатчике.
ВАЖНО! – имеющиеся на плате кнопки управления изолированы от сети питания только пластмассовыми толкателями. Для безопасного управления необходимо использовать опторазвязку.
Возможные изменения в схеме в зависимости от микропрограммы.
Усилитель DA-1 можно подключать к трансформатору тока или к шунту. Усилитель DA-1-2 может быть использован для измерения напряжения сети или для измерения сопротивления терморезистора если не используется термодатчик PD-1.
В случае длинных соединительных проводов необходимо на каждый провод хотя бы надеть помехоподавляющие кольцо. Имеют место помехи. Так например –пока я этого не сделал у меня «мышь» зависала.
Так же считаю важным отметить проверку надёжности изоляции АД –т.к. при коммутации силовых транзисторов выбросы напряжение на обмотках могут достигать значений 1,3 Uпит.
Общий вид.
Немного про управление.
Начитавшись книжек с длинными формулами в основном описывающих как делать синусоиду при помощи PWM. И как стабилизировать скорость вращения вала двигателя посредством таходатчика и ПИД регулятора. Я пришёл к выводу –АД имеет достаточно жёсткую характеристику во всём диапазоне допустимых нагрузок на валу.
Поэтому для личных нужд вполне подойдет управление описанное законом Костенко М.П. или как его ещё называют скаляроное. Достаточное для большинства практических случаев применения частотно регулируемого электропривода с диапазоном регулирования частоты вращения двигателя до 1:40. Т.е. грубо говоря мы в самом простом случае делаем обычную 3-х фазную розетку с переменной частотой и напряжением меняющимися в прямой зависимости. С небольшими «но» на начальных участках характеристики необходимо выполнять IR компенсацию т.е. на малых частотах нужно фиксированное напряжение . Втрое «но» в питающие двигатель напряжение замешать 3 гармонику. Всё остальное сделают за нас физические принципы АД. Более подробно про это можно прочесть в документе AVR494.PDF
Основываясь на моих личных наблюдениях и скромном опыте именно эти методы без особых изысков чаще всего применяются в приводах мощностью до 15 кВт.
Далее не буду углубляться в теорию и описание мат моделей АД. Это и без меня достаточно хорошо изложили профессора ещё в 60-х.
Но ни в коем случае не стоит недооценивать сложности управления АД. Все мои упрощения оправданны только некоммерческим применением инвертора.
Плата силовых элементов.
В программе V-1.0 для AT90SPWM3B реализовано
1- Частотное управление АД .Форма напряжения синусоида с 3 гармоникой.
2- Частота задания 5 Гц -50 Гц с шагом 1 Гц. Частота ШИМ 4 кГц.
3- Фиксированное время разгона –торможения
4- Реверс (только через кнопку СТОП)
5- Разгон до заданной частоты с шагом 1 Гц
6 – Индикация показаний канала АЦП 6 (разрядность 8 бит., оконный фильтр апертура 4 бита)
я использую этот канал для замера тока шунта.
7 – Индикация режима работы START,STOP,RUN,RAMP, и Частота в Гц.
8- Обработка сигнала авария от мс IR2135
Торможение двигателя принудительное – без выбега. При этом нужно помнить – если на валу будет висеть огромный вентилятор или маховик то напряжение на звене постоянного тока может достичь опасных значений. Но я думаю вертолёты с приводом от АД строить никто не будет
Функции микропрограммы в будущих версиях
1 -намагничивание ротора перед пуском
2- торможение постоянным током
3 –прямой реверс
4 – частота задания 1 -400 Гц.
5 – ограничение, контроль тока двигателя.
6 – переключаемые зависимости U/F
7 – контроль звена постоянного тока.
8 – некоторые макросы управления –это вообще в далёких планах.
Испытания.
Данная конструкции была проверена с двигателем 0.18кВт и 0.4 кВт и 0.8 кВт. Все двигатели остались довольны.
Только при малых оборотах и долговременной работе необходимо принудительное охлаждение АД.
Строка для программатора
av_28r4.exe -aft2232 -az +90pwm3b -e -w -v -fckdiv=1,psc2rb=0,psc1rb=0,psc0rb=0,pscrv=0,bodlevel=5 -c01.hex
Небольшое “вечернее” видео испытаний
Файлы:
плата микроконтроллера -layout5.0
силовой модуль -layout5.0
Программа для МК
Схема
схема S_plan7 -архив rar
Все вопросы в Форум.
Как вам эта статья? | Заработало ли это устройство у вас? |
www.radiokot.ru
Частотный преобразователь – принцип работы, схема подключения частотника
Чтобы подключить частотник к асинхронному трёхфазному двигателю, следует хотя бы на минимальном уровне разбираться в схеме его подключения и принципах работы. Нижеприведённая информация позволяет изучить данную тему.
Принцип управления электродвигателем
Ротор электрического двигателя функционирует благодаря вращению электромагнитных полей под статорной обмоткой. Скорость движения ротора находится в зависимости от промышленной частоты питающей сети.
Стандартное её значение составляет 50Гц и вызывает соответственно пятьдесят колебательных периодов за секунду. На протяжении минуты количество оборотов увеличивается до трёх тысяч. Настолько же часто осуществляются обороты ротора подвергаемого воздействию электромагнитных полей.
При изменении уровня прилагаемой к статору частоты, появляется возможность управления вращательной скоростью ротора и соединяемого с ним привода. Именно благодаря этому принципу осуществляется управление электродвигателем.
Классификация частотных преобразователей
По своим конструктивным различиям модели частотного преобразователя делятся на:
Индукционные.
Сюда относятся электрические двигатели имеющие асинхронный принцип работы. Данные устройства не отличаются высоким уровнем КПД и значительной эффективностью. Ввиду этих качеств они не имеют большой доли в общем числе преобразователей и редко применяются.
Электронные.
Пригодны для осуществления плавного управления оборотами в машинах асинхронного и синхронного типа. Управление в электронных моделях может производиться двумя способами:
Скалярный (согласно предварительно введённым параметрам взаимозависимости вращательной V и частоты).
Наиболее простой подход к управлению, довольно неточный.
Векторный.
Отличительной характеристикой является точность управления.
Векторное управление преобразователем частот
Принцип работы векторного управления заключается в следующем: при нём оказывается воздействие на магнитный поток, изменяя направление его «пространственного вектора» и регулирующий роторную частоту поля.
Создать рабочий алгоритм частотного преобразователя с векторным управлением можно при помощи двух способов:
Бессенсорное управление.
Осуществляется за счёт назначения зависимостей чередования между последовательностями широтно-импульсных модуляций инвертора для предварительно составленных алгоритмов. Регуляция размера амплитуды и выходной частоты, которую имеет напряжение, осуществляется в соответствии со скольжением и нагрузочным током, но обратная связь от роторной вращательной скорости не учитывается.
Потокорегулирование.
Рабочие токи устройства регулируются. При этом они раскладываются на активный и реактивный компонент. Это облегчает возможность внесения корректирующих изменений в рабочий процесс (изменение амплитуд, частот, векторных углов, которые имеет напряжение на выходе).
Способствует повышению точности и диапазона регуляции вращений асинхронного двигателя. Весьма актуален такой подход для устройства с малыми оборотами и высоким уровнем двигательных нагрузок.
В целом, схема векторного управления более прочих подходит для динамической регулировки вращающегося момента трёхфазного асинхронного двигателя.

Подключение транзисторных ключей
Все шесть IGBT-транзисторов соединяются с соответствующими диодами обратного тока с соблюдением встречно-параллельной схемы. После по цепи силового подключения, образуемой каждым транзистором происходит прохождение активного тока асинхронного двигателя, с последующим направлением его реактивной составляющей через диоды. С целью обеспечения безопасности инвертора и асинхронного двигателя от воздействия сторонних электрических помех конструкция преобразователя частоты может включать в себя помехозащитные фильтры. Если промышленные источники постоянного тока имеют рабочее напряжение в 220 В, то они также могут использоваться для запитывания инверторов.
Как подключить частотник к асинхронному двигателю?
Используемый для управления частотой напряжения преобразователь зачастую используется для энергоснабжения трёхфазных двигателей. С помощью преобразователя частоты также возможно обеспечить присоединение такого устройства к однофазной сети, предотвратив снижение его рабочей мощности. Этим они значимо выигрывают у конденсаторов, которые при подключении не могут сохранить исходный уровень мощности. Подробней про применение частотника для трехфазника- смотрите здесь.
При подключении частотного преобразователя следует предварительно разместить автоматический выключатель, функционирующий от тока сети по значению равного номинальному (или наиболее близкого к таковому) уровню потребления тока в двигателе. Если используется частотник трёхфазного типа, то соответственно следует воспользоваться трёхфазным автоматом с общим рычагом. Такой вариант обеспечивает быстрое обесточивание всех фаз сразу при замыкании на одной из них.
Ток срабатывания по своим характеристикам должен совпадать с однофазным током электрического двигателя.
В случае же, если для частотного преобразователя свойственно однофазное питание, то следует применить одинарный автомат, который подходит для работы с утроенным однофазным током.
Однако, при любых обстоятельствах установку частотного преобразователя нельзя осуществлять через включение автомата в месте разрыва нулевых или заземляющих проводов. В таких условиях подразумевается только прямое включение автомата.
Дальнейшую настройку преобразователя частоты осуществляют через соединение с контактами электрического двигателя. Используются при этом фазные провода. Но предварительно производится соединение обмоток электрического двигателя по схеме «звезда» или «треугольник».
Работа по той или иной схеме базируется на том, каков тип преобразователя частоты и характер производимого им напряжения.
По стандарту корпус каждого двигателя имеет отметку с двумя значениями, которым может равняться напряжение. Если частотник продуцирует напряжение соответствующее нижней границы, то соединение осуществляется по типу «треугольник». В остальных случаях для использования принцип «звезды».
Месторасположение управляющего пульта, обязательно прилагающегося при покупке частотного преобразователя, следует подбирать тщательно, чтобы обеспечить наибольшее удобство пользования.
Подключения пульта управления осуществляется по схеме обозначенной в прилагаемой к преобразователю инструкции. После рукоятка фиксируется на нулевом уровне, и автомат включается. В этот момент должно наблюдаться свечение светового индикатора.
Для использования частотного преобразователя, следует надавить кнопку «RUN» (она уже запрограммирована надлежащим образом). Далее делается лёгкий поворот рукоятки, провоцирующий старт постепенного вращения электрического двигателя. Если вращение осуществляется в направлении, противоположном необходимому, то следует нажать реверс. После при помощи рукоятки настраивается требуемая частота вращения устройства. При этом следует учитывать, что на корпусе пульта управления зачастую прописаны не уровни частоты вращения двигателя, выражаемые в оборотах в минуту, а частоты, которую имеет питающее напряжение, выражаемое в герцах.
Чтобы ограничить пусковой ток и снизить пусковой момент в момент пуска асинхронного двигателя с уровнем мощности больше 5000Вт, используется подключение типа «звезда-треугольник». До достижения номинала скорости задействуется схема подключения частотного преобразователя «звезда», а после питание осуществляется по схеме «треугольник». В момент переключения уровень пускового тока уменьшается в три раза относительно прямого пуска. При начале работы по второй схеме до момента разгона двигателей ток возрастёт до уровня прямого пуска. Такой варианты наиболее актуален для, имеющих большую маховую массу, позволяя после разгона сбросить нагрузку.
Логично, что использование такой схемы возможно только с двигателями, рассчитанными на подключения обоих типов.
Проведение работы по схеме «звезда-треугольник» всегда чревато резкими скачками уровня тока в противовес плавному нарастанию в условиях прямого пуска. В момент смены соединения скорость резко снижается и увеличить её можно только увеличив силу тока.
Частотный преобразователь.Как подключить трёхфазный электродвигатель от 220В.
Watch this video on YouTube
chistotnik.ru
Подключение частотного преобразователя к электродвигателю (схема)
Преобразователь частоты переменного тока уже много лет применяются при строительстве электромеханических приборов и агрегатов. Они позволяют модулировать частоту для того, чтобы регулировать скорость вращения вола электрического двигателя.
Частотники позволили подключать трёхфазный электрический двигатель к однофазной сети питания, при этом, не теряя мощности. При старинном типе подключения, через емкий конденсатор, большая часть мощности двигателя терялась, КПД существенно снижалось, обмотки электрического двигателя сильно перегревались.
Всех этих проблем удалось избежать, применением частотного преобразователя. При этом очень важно соблюдать правильное подключение частотного преобразователя к электрическому двигателю.
Некоторые особенности подключения любого частотника в связку с электрическим двигателем.
Во-первых
Из соображений безопасности эксплуатации прибора, при подключении частотника (или любого иного прибора) к сети питания, обязательно нужно устанавливать защитный автомат. Автомат устанавливается перед частотником.
При этом если частотный преобразователь подключается в сеть с трёхфазным напряжением, то установить необходимо автомат тоже трёхфазный, но с общим рычагом отключения.
Это позволит отключить питание от всех фаз одновременно, если хотя бы на одной фазе будет короткое замыкание или сильная перегрузка.
Если преобразователь частоты подключается в сеть с однофазным напряжением, то соответственно применяется автомат однофазный. Но при этом, в расчет берётся ток одной фазы, умноженный на три.

При подключении трёхфазного автомата, его рабочий ток определяется током одной фазы.
Однозначно запрещено устанавливать защитный автомат в разрыв нулевого кабеля, как при однофазном подключении, так и при трёхфазном. Такое подключение только внешне выглядит идентичным (ошибочно понимать, что цепь одна и не важно, где её разрывать).
На самом деле, в случае разрыва фазовых кабелей, при срабатывании автомата, питание полностью отключается и на цепях прибора не будет фаз вовсе. Это безопасно. А при срабатывании автомата с разорванным нулём, работа прибора прекратиться. Но при этом, обмотки двигателя и цепи частотника останутся под напряжением, что является нарушением правил техники безопасности и опасно для человека.
Также, не при каких условиях не разрывается заземляющий кабель. Как и нулевой, они должны быть подключены к соответствующим шинам напрямую.

Во вторых
Следует подключить фазовые выходы частотного преобразователя к контактам электрического двигателя. При этом обмотки электрического двигателя следует подключить по принципу «треугольник» или «звезда». Тип выбирается исходя из напряжения, которое вырабатывает частотник. Как правило, к каждому инвертеру приложена инструкция, в которой подробно расписано, как соединяются обмотки двигателя для подключения конкретного частотника. Схема подключения частотного преобразователя к 3-х фазному двигателю также должна быть приведена в инструкции.
Обычно на корпусах двигателей приведены оба значения напряжения. Если частотник соответствует меньшему, то обмотки соединяются по принципу треугольника. В других случаях по принципу звезды. Схема подключения частотного преобразователя также должна быть приведена в паспорте частотника. Там же обычно приводятся и рекомендации по подключению.
В третьих
Практически к каждому преобразователю частоты в комплекте прилагается выносной пульт управления. Несмотря на то, что на самом корпусе частотника уже есть интерфейс для ввода данных управления и программирования, наличие выносного пульта управления является очень удобной опцией.
Пульт монтируется в месте, где удобнее всего с ним работать. В некоторых случаях, когда преобразователь частоты несколько уступает в пылевой защите и защите от влаги, сам частотник может быть установлен вдали от двигателя, а пульт управления рядом, для того, чтобы не бегать к шкафу управления и не регулировать обороты там.
Всё зависит от конкретных обстоятельств и требований производства.

Первый пуск и настройка преобразователя частоты
После подключения к преобразователю частоты пульта управления, следует рукоятку скорости вращения вала двигателя перевести в наименьшее положение. После этого нужно включить автомат, тем самым подать питание на частотник. Как правило, после включения питания должны загореться световые индикаторы на частотнике и, при наличии светодиодной панели, на ней должны отобразиться стартовые значения.
Принцип подключения цепей управления частотного преобразователя не является универсальным. Нужно соблюдать указания, указанные в инструкции к конкретному частотнику.
Для первого запуска двигателя потребуется нажать кратковременно клавишу пуска на частотнике. Как правило, эта кнопка запрограммирована на пуск двигателя по умолчанию на фабрике.
После пуска, вал двигателя должен начать медленно вращаться. Возможно, двигатель будет вращаться в противоположную сторону, отличную. От необходимой. Проблему можно решить программированием частотника на реверсное движение вала. Все современные модели преобразователей частоты поддерживают эту функцию. Можно воспользоваться и примитивным подключением фаз в другом порядке фаз. Хотя это долго и не рентабельно по затрате времени и сил электромонтёра.
Дальнейшая настройка предполагает выставления нужного значения оборотов двигателя. Нередко на частотника отображается не частота вращения вала двигателя, а частота питающего двигатель напряжения, выраженная в герцах. Тогда потребуется воспользоваться таблицей, для определения соответствующего значения частоты напряжения частоте вращения вала двигателя.
При монтаже и обслуживании, а также замене преобразователя частоты важно соблюдать ряд рекомендаций.
- Любое касание рукой или иной частью тела токоведущего элемента может отнять здоровье или жизнь. Это важно помнить при любой работе со шкафом управления. При работе со шкафом управления следует отключить входящее питание и убедиться что именно фазы отключены.
- Важно помнить, что некоторое напряжение может ещё оставаться в цепи, даже при угасании световых индикаторов. Посему, при работе с агрегатами до 7 кВт, после отключения питания рекомендуется прождать минут пять не меньше. А при работе с приборами более 7 кВт, прождать нужно не менее 15 минут после отключения фаз. Это даст возможность разрядиться всем имеющимся в цепи конденсаторам.
- Каждый преобразователь частоты должен иметь надёжное заземление. Заземление проверяется согласно правилам профилактических работ.
- Строго запрещено использовать в качестве заземления нулевой кабель. Заземление монтируется отдельным кабелем отдельно от нулевой шины. Даже при наличии и нулевой шины и шины заземления, при соответствии их нормам электромонтажа, соединять их запрещено.
- Важно помнить, что клавиша отключения частотника не является гарантией обесточивания цепей. Эта клавиша всего лишь останавливает двигатель, при этом ряд цепей может оставаться под напряжением.
Подключение частотного преобразователя к электродвигателю осуществляется с применением кабелей, сечение которых соответствует тем характеристикам, которые указаны в паспорте частотника. Нарушение норм в меньшую сторону недопустимо. В большую сторону, может быть не целесообразно.
Прежде чем как подключить частотный преобразователь к электродвигателю, важно убедиться в соответствии условий, при которых будет работать преобразователь частоты. Фактически, условия должны соответствовать рекомендациям, приведённым в инструкции.

В каждом конкретном случае, подключение частотника может сопровождаться рядом обязательных условий. Чтобы узнать, как подключить частотник к 3 фазному двигателю схемы, которого есть в наличии. Сначала изучаются схемы. Если в них всё понятно, подключение выполняется при строго следовании инструкции. Если что-то не понятно, не следует выдумывать самостоятельно и полагаться на свою интуицию. Нужно связаться с поставщиком или производителем, для получения соответствующих указаний.
[wpfmb type=’warning’ theme=2]Лучше дождаться помощи специалиста, чем потом ремонтировать сломанную технику. Случай-то не будет гарантийным.[/wpfmb]

Частотный преобразователь.Как подключить трёхфазный электродвигатель от 220В.
Watch this video on YouTube
chistotnik.ru
Частотный преобразователь: принцип работы и построение схемы
Довольно часто у многих радиолюбителей или просто хозяйственных людей возникает необходимость в регулировании частоты вращения трехфазного двигателя. Использовать для этого банальный регулятор мощности нет смысла, потому что он построен на принципе изменения напряжения, а ведь, как известно, двигатели переменного тока не хотят регулироваться таким способом, даже однофазные.
Обороты, конечно, будут изменяться, но только в небольшом и практически незаметном пределе, после чего при достижении нижнего порога, а при питании 220 В при напряжении 150 В, обороты и вовсе останавливаются. Если с вала необходимо получит еще и нормальный момент, например, при регулировании скорости движения конвейера или протяжной рейки, в зависимости к чему он подключен, то подойдет только частотный преобразователь.
Что такое частотное преобразование
Под понятием частотное преобразование, а далее и частотный преобразователь, следует понимать целую систему, которая нечто делает. А именно преобразует частоту питающего обмотки асинхронного двигателя напряжения. То есть акцентируем ваше внимание на том, что здесь изменяется не напряжение, а именно его частота. В таком режиме управления момент на валу двигателя сохраняется при изменении его скорости вращения.
Но чтобы сделать преобразователь частоты своими руками, необходимо вспомнить конструкцию и возможные характеристики работы асинхронных двигателей. Более того, решая конкретно изготовить такое устройство, первым делом необходимо найти подходящий по параметрам двигатель, который справится с возлагаемой на него работой в составе готового комплекса.
Выбор двигателя
Для проектирования самодельного частотника сначала стоит вспомнить, что такое асинхронный двигатель и как он работает. Несинхронный двигатель или ДПТ представляет собой механическое устройство, состоящее из статора с обмотками возбуждения и ротора. Второй компонент может быть:
- короткозамкнутым, то есть средние проводники соединены по торцам кольцами, а сами они толстые и короткие, из-за чего конструкция получила название «беличье колесо»;
- фазным, ротор имеет несколько обмоток, которые присоединены к токосъемным кольцам, применяемым для отвода напряжения в режиме генератора.
Принцип действия двигателя очень прост и заключается во влияние создаваемого в статоре вращающегося магнитного поля на короткозамкнутый ротор, в котором возникает ЭДС. Из-за этого в роторе начинает протекать ток, что ведет к образованию сил, взаимодействующие с магнитным полем статора. При этом частота вращения ротора и магнитного поля неравны, оттого и название асинхронный двигатель.
Разумно предположить, что если изменить частоту питающего статор напряжения, то и измениться скорость вращения ротора. На деле оно так и есть, поэтому все серьезные компании используют именно частотные преобразователи для управления такими моторами. Когда проектируется схема частотного преобразователя для электродвигателя своими руками, следует учесть тип мотора и все его характеристики. В частности, мощность, число полюсов и максимальную скорость вращения. Скачать готовые схемы можно с интернет-журнала «Радиокот». Там их представлено очень много.
Получение магнитного поля
Для получения вращающегося магнитного поля трехфазного, необходимо через виток катушки на статоре пропустить ток с необходимой частотой, который будет определяться по формуле: iA = I m sinωt. В результате действия этого тока по оси витка начинает действовать МДС FA. Так как витки в статоре чередуются по фазам, то и пульсация будет иметь такой же характер, создавая общую пульсирующую силу F, являющеюся константой. Она определяется как корень из квадратов сил в двух витках, смещенных относительно друг друга под углом 90ºС.
В результате чего возникает вращение поля с угловой скоростью, выраженную формулой для каждого витка в отдельности: ω =2π f 1. Но для расчета скорости поля во всей машине необходимо учитывать общее количество пар полюсов, выраженное символом p. И тогда скорость поля будет равна: ω 0 =2π f 1 /р. Соответственно, можно высчитать и частоту вращения, выраженную в об/мин: n0 =60 f 1 /р.
Кроме этих данных, необходимо помнить, что характеристики будут отличаться от режима в холостом ходе, то есть при ω = ω 0, и при нагрузке, когда ω ≠ ω 0. А также было бы полезным вспомнить, что под нагрузкой возникает такое понятие, как скольжение, которое появляется из-за отставания ω от ω 0. И оно выражается как: s =( ω 0 — ω)/ ω 0. Это говорит о том, что при построении САУ с увеличением этой величины необходимо автоматически изменять частоту напряжения в обмотках, чтобы обеспечить стабильность скорости при различных нагрузках.
Промышленные частотные привода
Все промышленные частотники обеспечивают различные принципы регулирования скоростью и моментом на валу асинхронных двигателей за счет изменения не только частоты, но и сдвига фаз, времени нарастания управляющих импульсов, динамическим торможением и многими другими параметрами. При этом все это выполняется в автоматическом режиме без дополнительного участия извне. Поэтому промышленная схема частотного преобразователя для трехфазного двигателя состоит из следующих компонентов:
- Центрального процессора, выполняющего роль формирователя задающих и управляющих импульсов.
- Силовая часть: выпрямитель и одновременно блок управления, построенный на IGBT — модулях.
- Блок ввода и вывода данных или просто интерфейс для взаимодействия с пользователем.
- Преобразователь шины для работы с системой программного управления.
Трехфазный двигатель может быть оснащен датчиком, тогда требуется обратная связь. Датчик может быть оптическим, индуктивным или магнитным. В высоко оборотистых двигателях расчет скорости ведется программно на основании характеристик.
Плюсы использования частотных преобразователей
Недаром человек стал активно применять частотные преобразователи на всех видах предприятий и даже в быту, потому что они намного более экономичны, чем коллекторные двигатели и могут работать в таких условиях, в которых двигатель со щетками быстро выйдет из строя. Кроме всего этого, использование частотного преобразователя дало возможность заменить механические вариаторы с приводными системами, что позволило намного упростить конструкцию оборудования. А учитывая, что ДПТ при работе практически не требует ремонт, то использование ПЧ является просто идеальным решением.
Но следует понимать, что есть пределы регулирования, при которых принцип управления асинхронным двигателем также будет изменяться:
- При регулировании скорости в диапазоне 16:1 и менее, необходимо применять использовать ПЧ, работающий по вольт — частотной характеристике.
- Для регулирования в диапазоне 50:1 необходимо использовать бессенсорное векторное регулирование.
- В больших диапазонах следует применять обратную связь с использованием датчиков или встроенного в ПЧ пид-регулятора.
В любом случае, когда двигатель планируется применять в тяжелых условиях работы, что обычно и бывает, то лучше использовать именно векторное регулирование.
Векторное и частотное регулирование
Чтобы построить качественную систему САУ с управлением асинхронным двигателем, необходимо хорошо разбираться в понятиях, а именно в векторном регулировании или частотном регулировании.
Частотный принцип применяется в системах, где нет надобности жестко контролировать скорость, а важен создаваемый двигателем поток без значительной нагрузки. Но когда требуется с первого оборота обеспечить высокий момент и хорошее тяговое усилие, то следует использовать векторное управление.
Векторные САУ также применяются в следящих системах с небольшими скоростями подач. Например, в станках для подачи столов или шпиндельных суппортов. Здесь не только надо преодолеть инерцию станины, но и обеспечить необходимое усилие при обработке детали.
Проектируя частотник для трехфазного электродвигателя своими руками, необходимо учитывать тип нагрузки, потому что от этого будет зависеть и характеристика управления силовыми ключами для достижения необходимой мощности при минимальных потерях.
Техническая реализация ПЧ
Вот мы и подошли к построению блок-схемы управления асинхронным электродвигателем. И сразу стоит уверить, что практически все производители этого вида преобразователей используют одну и ту же блоку схему, которая может быть применена и вами для конструирования собственного преобразователя. И она состоит из следующих компонентов:
- Неуправляемого выпрямителя трехфазного 380 В или однофазного 220 В напряжения сети.
- Шины постоянного тока со встроенным LC — фильтром, состоящей из набора конденсаторов, которые обеспечивают ее стабильный заряд и исключают пульсации при скачках в сети.
- Инвертора напряжения, преобразующего постоянное промежуточное напряжение в переменное нужной частоты. Он оснащен ШИМ для качественного управления.
- Асинхронного электродвигателя, которым и осуществляется управление.
Следует сказать, что производители долго шли к созданию идеальной ШИМ, с помощью которой можно было бы стабильно управлять двигателем. И только с появлением IGBT — модулей это стало возможным. Поэтому и для построения своего преобразователя рекомендуется использовать ключи с напряжением не менее 1200 В с учетом возможных пульсаций сети и с хорошим запасом по току. На рынке вполне можно отыскать транзисторы и модули до 100 и более А.
Упрощенная блок схема преобразователя будет выглядеть следующим образом:
- Выпрямитель, его подключение выполняется по принципу одно или 2-фазной мостовой схеме. Он предназначен для преобразования переменного напряжения в постоянное, пригодное для дальнейшего преобразования частоты от 0 Гц до частоты сети. Промежуточный контур условно состоит из двух блоков:
- Устройства плавного заряда шины, чтобы не повредит токоведущие линии при заряде конденсаторов. Оно получило название балластного сопротивления.
- Блок конденсаторов – он же фильтр.
Расчетное напряжение промежуточного контура в √2 раз больше U N. После достижения на шине необходимого уровня постоянного напряжения резистор шунтируется контактной парой. Последний блок в схеме – инвертор. Это окончательный формирователь выходных импульсов, которые затем поступают на двигатель, обеспечивая его вращение с заданной скоростью.
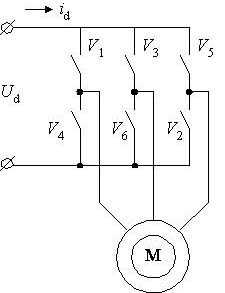
Обобщенное строение силового модуля показано на следующем рисунке:
Для построения инвертора применяются высоко токовые транзисторы, работающие в чисто переключающем режиме. В процессе работы они сильно нагреваются, поэтому устанавливаются на больших радиаторах с большой площадью рассеивания тепла.
Для проектирования схемы управления инвертором, необходимо себе четко представить порок работы ключей. Для этого обратите внимание на рисунок ниже:
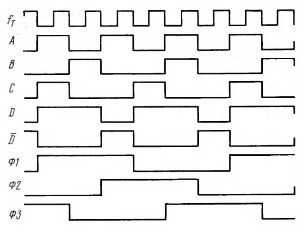
На нем представлены временные интервалы для каждого из ключей, установленных именно в таком порядке, как было показано на прошлом рисунке. То есть в фазе U работают транзисторы Т1 и Т4, в фазе V – Т3 и Т6 и так далее. Для каждой из обмоток двигателя свая пара IGBT. При построении ПЧ для маломощных моторов с небольшими токами можно использовать простые биполярные или полевые транзисторы.
На временной диаграмме видно, что в первый момент времени открываются транзисторы Т1, Т5 и Т6. Далее, транзистор Т1 и Т6 продолжают быть открытыми, в то время, как Т5 закрывается и открывается Т2 и так далее. Эта диаграмма полностью повторяет диаграмму напряжений в 3-фазной сети, но только импульсы имеют прямоугольную форму и имеют заданную контроллером частоту.
В результате получается своего рода циклическое переключение транзисторов, при этом ток в фазах получается сдвинут на 120º относительно друг друга. А для получения управляющего напряжения, состоящего из множества импульсов, в виде синусоидального сигнала с минимальным числом гармоник, пользуются отношением времени включения и выключения транзисторов.
Чтобы минимизировать потери в двигателе, которые обычно возникают при попытках регулирования за счет уменьшения напряжения на обмотках двигателя, прибегают к увеличению частоты.
Принцип регулирования скорости
Для изменения скорости вращения вала двигателя необходимо изменить частоту f 1, но делать это следует осторожно. Ведь необходимо сохранить ток намагничивания неизменным. Для поддержания этого баланса U 1 должны быть пропорционально f 1. но если баланс нарушен, то ток намагничивания будет либо уменьшаться, либо увеличиваться. Соответственно, поле будет ослабляться или перенасыщаться. Чтобы обеспечить это u / f -характеристику выбирают линейной до достижения угловой частоты. Она наступает тогда, когда напряжение на обмотках повышается до максимальной отметки.
chebo.pro
Принцип работы частотного преобразователя. Схема частотного привода.
Переити в каталог продукции: Частотные преобразователи
Электроприводы постоянного тока являются очень простыми с точки зрения организации системы регулирования скорости вращения двигателя, но сам электродвигатель является слабым звеном системы, ведь он достаточно дорогой и при этом не отличается особой надежностью. К тому же область применения данных двигателей ограничена из-за излишнего искрения щеток и, следовательно, повышенной электроэрозии и износа коллектора, что к общем не позволяет использовать двигатели постоянного тока в пыльных условиях и в средах с опасностью взрыва. Альтернативой электроприводам постоянного тока является комплексное применение асинхронных двигателей переменного тока с частотными преобразователями.
Асинхронные двигатели повсеместно используются в виду очень простого устройства и надежности, при меньших габаритах и массе они обеспечивают такую же мощность, как и двигатели постоянного тока. Главным минусом их является сложность организации системы регулирования скорости двигателя традиционными для двигателей постоянного тока методами. Теоретическая база для разработки первых частотных преобразователей, которые могли уже тогда стать решением вопроса регуляции скорости, была заложена еще в 30-е годы двадцатого века. Отсутствие микропроцессоров и транзисторов не позволяло воплотить теорию в практику, но с появлением транзисторных схем и управляющих микропроцессоров в Японии, США и Европе примерно в одно время были разработаны варианты частотных преобразователей.
При наличии других способов управления скорости вращения исполняющих механизмов (речь идет о механических вариаторах, резисторных группах, вводимыми в ротор/статор, электромеханических частотных преобразователях, гидравлике) наиболее эффективным является использование статических частотных преобразователей, который экономическим выгоднее других вариантов в виду дешевизны монтажа, эксплуатации и высокого КПД. Неприхотливость преобразователей также обусловлена отсутствием подвижных частей в виду того, что регуляция осуществляется на этапе подачи тока и основана на изменении параметров питания, а не на контроле за скоростью вращения при помощи средств механического управления.
Каков принцип частотных методов регулирования? Наглядное объяснение можно вывести из следующей формулы
Из выражения видно, что путем изменения частоты входного питающего напряжения (f1) изменяется угловая скорость статора, точнее его магнитного поля, но этом взаимозависимые характеристики. Эффект достигается при постоянном числе пар полюсов (p). Что это дает? В первую очередь, плавность регулирования (в особенности при пиковых нагрузках в момент пуска двигателя) скорости при очень высокой жесткости механических характеристик. Также достигается повышенное скольжение асинхронного двигателя, что существенно снижает потери мощности и увеличивает коэффициент полезного действия.
Высокие показатели КПД, коэффициента мощности, перегрузочной способности достигаются при одновременном изменении частоты и напряжения. Законы изменения этих параметров напрямую зависят от момента нагрузки, который может иметь статичный, вентиляторный и обратно пропорциональный скорости вращения характер.
При постоянном моменте нагрузке напряжение на статоре будет регулироваться в пропорциональной зависимости от частоты, что хорошо видно из формулы:
Если момент нагрузки имеет вентиляторный характер, то напряжение будет пропорционально квадрату частоты питающего напряжения.
Ну и моменте нагрузки, который обратно пропорционален скорости получим:
Как видно из вышеописанного при обеспечении одновременного регулирования частоты питающего напряжения и параметров напряжения на статоре частотным преобразователем достигается плавное бесступенчатое регулирование скорости вращения вала двигателя. При этом отсутствие передач позволяет более точно регулировать скорость вращения по заданным пользователем параметрам.
Основные достоинства применения регулируемых приводов на предприятиях.
Интеграция систем регулирования качественно изменяет технические характеристики всех участников технологического процесса, нуждающегося в регуляции. Большая часть экономической эффективности заключается в возможности регулирования при помощи частотного преобразователя технологических характеристик процессов, температуры, давления, скорости движения, скорости подачи главного движения. Конечно же, максимальная эффективность достигается на объектах, предназначенных для перемещения жидких масс. До сих пор популярным способом регулирования скорости потока и мощности является применение заслонок и заглушек, в частных случаях различных регулирующих механических клапанов, но эти методы менее эффективны чем изменение скорости самого исполнительного механизма и чреваты потерями транспортируемой жидкости.

Разница в производительности и эффективности между дросселированием посредством механических средств и применением частотных преобразователей очевидна на следующем рисунке. (схема 1) Из схемы становится ясно, что возрастает экономия ресурсов, а также нивелируются проблемы, связанные с полной потерей динамической мощности потока во время закрытия заслонок, что приводит, по сути, к холостой работе двигателя. Это увеличивает экономическую эффективность частотных преобразователей.
Конструкция типового частотного преобразователя.
Принципиальной задачей преобразователя частоты является изменение параметров электрического тока, это осуществляется при помощи транзисторного выпрямления тока и преобразования его до необходимых заданных значений. Типовой частотный преобразователь состоит из трех частей:
– Звено постоянного тока. Состоит из выпрямителя и фильтрационных устройств. Звено постоянного тока принимает входной сигнал и перенаправляет его в инвертор.
– Импульсного инвертора. Силовой трехфазный инвертор обычно имеет шесть транзисторов-ключей и осуществляет преобразование тока до заданных частот и амплитуд, а затем подает его на статор. Инвертор может состоять из тиристорной схемы.
– Микропроцессорной системы управления. Управляет системами преобразования и защиты преобразователя.
Четкая синусоида выходного сигнала – результат работы IGBT-транзисторов в качестве ключей инвертора, которые работают с более высокой частотой переключения, чем устаревшие тиристоры.
Как работает частотный преобразователь?
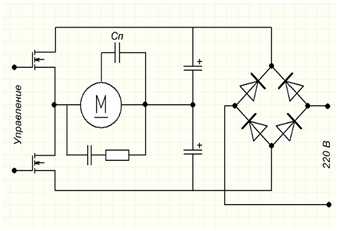
Схема преобразователя представлена в наглядном виде на следующем рисунке. (схема 2)
На схеме отображены основные структурные части преобразователя, а именно: инвертор, диодный силовой выпрямитель, модуль управления широтно-импульсной модуляцией, система управления, дроссель и конденсатор фильтра. Регуляция выходной частоты и напряжения (fвых. и Uвых., соответственно) осуществляется путем широтно-импульсного управления высокой частоты. Управление зависит от периодичности модуляции. Это период, в течение которого статор по очереди получает сигнал от положительного и отрицательного полюса напряжения. Длительность периода модулируется согласно синусоидальному закону гармонических частот, дополнительное преобразование происходит уже в обмотках двигателя, где после фильтрации ток имеет уже строго синусоидальную форму.

Сама кривая выходного напряжения – это двуполярная последовательность высокой частоты, созданная прямоугольными импульсами. Данные параметры также регулируются широтно-импульсной модуляцией, а сама ширина импульсов модулируется по синусоидальному закону. Изменение характеристик выходного напряжения осуществляется одним из двух способов: изменение AP (амплитуды) путем регуляции значения входного напряжения Uвх.; при Uвх., имеющим постоянное значение, путем внесения изменений в программу, контролирующую периодичность переключения переключателей V1-V6. Наличие современных IBGT-транзисторов на микропроцессорном управлении применение второго способа является более продуктивным и широко используемым. ШИМ также позволяет добиться формы кривой тока близкой к синусоиде, но уже благодаря свойствам обмоток, выполняющих функции фильтра.

Данный метод управления также позволяет существенно увеличить коэффициент полезного действия преобразователя и по своим характеристикам полностью аналогично методике управления путем изменения амплитуды и частоты тока. В наше время существует несколько компоновок инверторов с управляемыми ключами: запираемые GTO тиристоры; биполярные IGBT-транзисторные ключи с затвором. С примером можно ознакомиться на следующем рисунке. (рисунок 2) Здесь изображена мостовая трехфазная схема с использованием IGBT-транзисторов. Инвертор автономный. В данной схеме используется комплекс из 6 транзисторных ключей (на схеме V1-V6), емкостного фильтра тока. Транзисторы включены при помощи диодов обратного тока (на схеме D1-D6) по встречно-параллельной схеме.
Алгоритм переключения вентилей задается микропроцессором, переключение преобразует постоянное Uвх. в переменное выходное напряжение с прямоугольными импульсами. Активная составляющая токового потока асинхронного двигателя проходит через транзисторы, а реактивная – через диоды обратного тока.
И – трехфазный мостовой инвертор;
В – трехфазный мостовой выпрямитель;
Сф – конденсатор фильтра;
Переити в каталог продукции: Частотные преобразователи
www.maxprofi.su
