
Схемы на микроконтроллерах, самодельные устройства и программаторы
Светофор на RGB-светодиодной ленте, управляемый ARDUINO UNO
В некоторых случаях требуется «светофор местного значения», например, чтобы регулировать проезд автомобилей на автостоянку или на территорию гаражного кооператива, если въезд по различным причинам слишком узок для одновременного проезда двух машин. Здесь предлагается описание простого …
1 96 0
Схема цифровой шкалы на Arduino UNO для связного КВ-приемникаЗдесь приводится описание цифровой шкалы для коротковолнового связного приемника, работающего в диапазонах 160м, 80м, 40м, 20м, 10м или любом из них. Шкала работает с двухстрочным ЖК-дисплеем. В его верхней строке показывает значение частоты в кГц,а в нижней длину волны в метрах. Внося …
1 1227 0
Самодельный велоспидометр на ARDUINO UNO (ATMEGA328)Здесь описывается цифровой прибор на микроконтроллере, измеряющий скорость движения велосипеда.
1 782 0
Девятиразрядный мультиметр на АЦП AD7705 и AVR микроконтроллереОсновой предлагаемого мультиметра является микросхема 16-битного двухканального дельта-сигма аналого-цифрового преобразователя (АЦП) AD7705. Широко распространенные мультиметры на основе АЦП двойного интегрирования ICL7106 [2] обеспечивают отображение результата преобразования числом, не превышающим 1999, что соответствует, без учета знака, 11-битному АЦП, за вычетом 48 единиц счёта…
1 2085 0
Реле времени на микроконтроллере AVR ATtiny2313 с индикатором фирмы Data VisionСхема и описание самодельного реле времени на AVR микроконтроллере ATtiny2313 с индикатором фирмы Data Vision. Реле времени (таймеры), пожалуй, одна из самых массовых разработок конструкторов электронных техники.
1 711 0
Макет светофора на ARDUINO UNO, схема и описаниеЭтот макет светофорного управления движения на перекрестке можно использовать в различных играх по изучению правил дорожного движения. Он может быть сделан как в миниатюрном, настольном варианте для передвижения по нему игрушечных моделей машин и кукол-пешеходов, так и в варианте для детского …
1 390 0
Самодельный кодовый замок на микроконтроллере (PIC16F628A)Схема самодельного кодового замка, построенного на микроконтроллере PIC16F628A и транзисторах, имеет цифровое табло. Этот замок можно использовать для ограничения доступа в помещение, гараж, дом, сейф, шкаф. Его исполнительным устройством может служить механизм запирания двери автомобиля …
1 1187 0
Часы с календарем на индикаторах ИН-12Предлагаемые часы показывают текущее время и дату, обладают функциями будильника. Их особенность – использование газоразрядных цифровых индикаторов ИН-12. Подобные индикаторы широко применялись в электронных часах и цифровых измерительных приборах в семидесятые годы прошлого века. Индикаторы …
Их особенность – использование газоразрядных цифровых индикаторов ИН-12. Подобные индикаторы широко применялись в электронных часах и цифровых измерительных приборах в семидесятые годы прошлого века. Индикаторы …
1 1213 0
Автоматическое управления вентиляцией помещения, схема на МК ATtiny2313AСхема самодельного устройства, автоматически включающего и выключающего принудительную вентиляцию помещения. Работа устройства осуществляется в зависимости от относительной влажности воздуха в помещении и скорости её изменения. Оно не содержит дефицитных деталей и может быть помещено в стандартный …
0 1347 0
Двоичные часы на микроконтроллере PIC16F628AСхема самодельных двоичных часов на микроконтроллере PIC16F628A и светодиодах. Эти необычные карманные часы могут стать оригинальным подарком. Индикатор времени в них построен всего на шести единичных светодиодах. Секрет в том, что число часов и число минут текущего времени отображаются ими . ..
..
1 752 0
1 2 3 4 5 … 10Радиодетали, электронные блоки и игрушки из китая:
Устрйоства на микроконтроллерах Microchip серии PIC
Бортовой компьютер для автомобиля (PIC18F258, C)
20.03.2013
Чесались руки сделать что-то для свежекупленного автомобиля, остановился на полезной вещи – бортовой компьютер. Автомобиль Nissan Almera N15…
Просмотров: 9466
Обман одометра (PIC12F629)
08.08.2008
Устройство собрано на МК PIC12F629 и предназначено для управления сигналом идущим от одометра. Сигнал можно отключать, включать тестовый…
Автомобильный охранный сигнализатор на микроконтроллере (PIC16F84A, asm)
08.08.2008
Это устройство отличается от подобных отсутствием времязадающих RC- цепей. Поскольку его основой служит микроконтроллер, оно…
Просмотров: 4010
Автомобильный цифровой спидометр (PIC16F84A, asm)
08. 08.2008
08.2008
Автомобильный цифровой спидометр предназначен для установки в автомобили со штатными аналоговыми спидометрами, управляемые…
Просмотров: 7378
COM to MIDI или преобразование скорости USART (PIC16F828A, asm)
08.03.2009
К сожалению, практически все переносные компьютеры не оборудованы приёмопередатчиком MPU-401. В связи с этим, подключать их обычным…
Просмотров: 3112
USB Bootloader (загрузчик) для микроконтроллеров PIC18 (asm, C++)
03.11.2010
Просмотров: 4146
Универсальный таймер на PIC контроллере (PIC16F84A, C)
09.08.2008
Универсальность описываемого в статье устройства в том, что оно способно не
только включить и выключить в заданное время четыре…
Просмотров: 5080
АЦП с интерфейсом RS232 (PIC12F675, asm)
09. 08.2008
08.2008
Воспользовавшись восьмивыводным микроконтроллером PIC12F675 со встроенным АЦП, автор разработал простую приставку к компьютеру и…
Просмотров: 5051
Частотомер – цифровая шкала на LED (PIC16F84/PIC16CE625, asm)
26.02.2011
Описание опубликовано в журнале «Радио» № 1 за 2002 г., стр. 60…62, Частотомер – цифровая шкала на PIC16CE625, позднее было опубликовано…
Просмотров: 5753
Описание опубликовано в журнале «Радио» № 7 за 2004 г., стр. 64, 65 Частотомер – цифровая шкала с ЖК индикатором и «Радиолюбитель»…
Просмотров: 5978
Пробник “Мечта электрика” (PIC12F675, C)
30.10.2010
Возможности :
– измерение сопротивления 0 – 300 Ом.
– звуковой сигнал при сопротивлении менее 20 Ом.
– тест переходов полупроводников.
-…
Просмотров: 6899
Частотомер и прибор для проверки конденсаторов, импульсных трансформаторов (PIC16F876A)
28. 08.2010
08.2010
В последнее время, с появлением электролитических конденсаторов предназначенных для работы на высоких частотах, стал популярен способ…
Просмотров: 11908
Кабельный пробник на микроконтроллере (PIC16F84A, asm)
28.08.2010
Устройство состоит из двух частей: передающей и приемной. Жилы кабеля с одной стороны подключают к контактам Х1—Х8 передатчика, с другой…
Сопряжение с компьютером цифрового мультиметра серии 830 (PIC12F629, asm, C++)
09.08.2008
Подключение малогабаритного мультиметра к персональному компьютеру позволяет проводить статистическую обработку результатов серии…
Просмотров: 4251
АЦП с интерфейсом RS232 (PIC12F675, asm)
09.08.2008
Воспользовавшись восьмивыводным микроконтроллером PIC12F675 со встроенным АЦП, автор разработал простую приставку к компьютеру и…
Просмотров: 5051
Микроконтроллерный определитель выводов транзисторов (PIC16F84A, asm)
09. 08.2008
08.2008
Принцип действия определителя транзисторов основан на том, что на любом из выводов микроконтроллера, настроенном как выходной, может…
Просмотров: 4281
Микроконтроллерный искатель проводки (PIC12F629, C)
09.08.2008
Просмотров: 6807
Генератор на PIC16F84A и AD9850 (PIC16F84A, C)
09.08.2008
Описываемый в статье генератор содержит микроконтроллер, но использован он только для управления специализированной микросхемой —…
Просмотров: 7252
Паяльная станция на PIC-контроллере (PIC16F84A, asm)
09.08.2008
Профессиональные паяльные станции импортного производства обладают большим набором сервисных функций, но очень дороги и недоступны…
Просмотров: 6322
Прибор для контроля многожильных кабелей на НТ9200В (PIC16F84A)
09.08.2008
В современной технике связи, компьютерных сетях и дистанционных контрольно- измерительных приборах, системах телеуправления.
Просмотров: 5405
Приставка на PIC для проверки телефонных аппаратов (PIC16F84A, PIC16F628, asm)
09.08.2008
Мне иногда приходится заниматься ремонтом телефонных аппаратов. И я здорово надоел жене с просьбой перезвонить домой, чтобы проверить…
Просмотров: 2565
Микрофарадометр на PIC микроконтроллере (PIC16F876A, C)
09.08.2008
В радиолюбительской практике необходимость измерения больших значений электрической емкости очевидна. Многие современные…
Просмотров: 4091
Частотомер на PIC микроконтроллере (PIC16F84A, asm)
09.08.2008
Простой 4-разрядный частотомер на микроконтроллере
Рис. 1. Схема частотомера на микроконтроллере PIC16F84
Рис. 2. Фото частотомера на…
Просмотров: 11305
Электронный резьборез с микроконтроллерным управлением (PIC16F84A, C)
09.08.2008
Принцип действия резьбонарезного устройства основан на быстром изменении направления вращения режущего инструмента в пределах.
Просмотров: 4453
Частотомер на PIC контроллере с LCD дисплеем (PIC18F252, C)
09.08.2008
Частотомер собран на достаточно распространённых микроконтроллерах фирмы MICROCHIP PIC18F252 с применением 2х16 (он был под рукой), хотя можно…
Просмотров: 6045
Электронный цифровой частотомер на PIC микроконтроллере (PIC16F873)
09.08.2008
Цифровой частотомер на PIC микроконтроллере, позволяет измерять частоту в диапазоне от 10Гц до 40 МГц, с точностью до 0.01кГц.
Цифровой…
Просмотров: 3947
Стенд для тестирования ATX блоков питания, методом снятия кросс-нагрузочных характеристик (PIC16F84A, asm)
19.04.2008
Цель проекта – разработка аппаратной части и программного обеспечения стенда для автоматического тестирования АТХ блоков питания…
Просмотров: 6327
Частотомер, прибор для проверки конденсаторов, импульсных трансформаторов V3 (PIC16F876A)
19.12.2007
Это дальнейшее развитие Прибор для проверки конденсаторов, импульсных трансформаторов и измерения частоты. Основные отличия :
-…
Основные отличия :
-…
Просмотров: 5761
Применение семи сегментных LED модулей HT1611, HT1613, МТ10Т7-7 (asm)
24.12.2010
Практически любое микроконтроллерное устройство имеет те или иные устройства индикации. В простейшем случае это всего несколько…
Просмотров: 5211
Контроллер графического LCD WG32240 (PIC18F2520, C)
09.08.2008
В настоящее время промышленностью выпускается большое количество графических ЖКИ. Существуют как модели со встроенным контроллером,…
Просмотров: 3699
ИК пульт ДУ для Canon, Nikon, Minolta, Pentax, Olympus (PIC12F629, asm)
02.12.2010
Некоторые фотокамеры фирм Canon, Nikon, Minolta, Pentax, Olympus имеют функцию дистанционной съёмки с помощью инфракрасного пульта дистанционного…
Просмотров: 3662
Часы с коррекцией времени от GPS (PIC16F876, asm)
16.05.2008
Конструкции и принципиальные схемы электронных часов в настоящее время достаточно хорошо разработаны. Но точность индикации времени…
Но точность индикации времени…
Просмотров: 4699
Калькулятор для спортивных соревнований с гандикапом (PIC16F88, asm)
21.04.2008
Разработанный авторами калькулятор предназначен для быстрого пересчета времени, затраченного участниками соревнований на…
Просмотров: 2368
Универсальная телефонная приставка (PIC16F84A)
01.03.2008
Сегодня практически во всех крупных городах телефонные номера переводятся на повременную оплату. Недалеко то время, когда поминутная…
Просмотров: 3911
Таймер на PIC16F628 (PIC16F628, asm)
01.03.2008
Проэкт представляет собой часы с таймером, который может быть запрограммирован на включение и на выключение. Я начал его делать так как…
Просмотров: 3861
Термостат для теплого пола (PIC16F84A, asm)
22.01.2008
Сегодня во многих квартирах имеются полы с электроподогревом. Они удобны и достаточно долговечны, но вот их терморегуляторы имеют ряд. ..
..
Просмотров: 4605
Дистанционный регулятор освещения (PIC16F629, C)
22.01.2008
Предлагаемый прибор — один из вариантов регулятора яркости ламп накаливания с расширенными за счет применения микроконтроллера…
Просмотров: 5151
Усовершенствованная “поющая ёлка” на PIC (PIC16F628, asm)
20.01.2008
Особенностью данной программы является возможность плавного изменения яркости светодиодов. Прототипом послужила “поющая…
Просмотров: 3810
Простые часы-будильник на PIC16F84 (PIC16F84, asm)
17.01.2008
Не так давно электронные часы строили на так называемых часовых микросхемах серии К176 и специализированных микросхемах серий К145…
Просмотров: 4987
Экономичный цифровой термометр (PIC16F628, asm)
16.01.2008
В последнее время конструирование цифровых термометров очень популярно. Применение микроконтроллеров (МК) и современных датчиков…
Просмотров: 4332
Часы-будильник с ЖК-индикатором (PIC16F84A)
15. 01.2008
01.2008
Особенности устройства:
Два будильника.
Сохранение времени установки будильников при выключении питания.
Возможность отключения…
Просмотров: 3479
Таймер на PIC16F84 (PIC16F84A, asm)
07.01.2008
Таймер — одна из наиболее популярных радиолюбительских конструкций Вниманию читателей предлагается еще один вариант В отличие от…
Просмотров: 4441
Точные часы-будильник на микроконтроллере (PIC16F628A, asm)
04.01.2008
При создании этой конструкции основной упор был сделан на точности хода часов и удобстве управления.
– Реализовано 2 режима…
Просмотров: 4565
Часы с таймером на микроконтроллере (PIC16F628A, asm)
04.01.2008
Проэкт представляет собой часы с таймером, который может быть запрограммирован на включение и на выключение. Я начал его делать так как…
Просмотров: 4068
Автомат вечернего освещения (PIC12C508, C)
04. 01.2008
01.2008
Устройство, схема которого показана на рис. 1, ежедневно в установленное время включает и выключает свет. Разработал его таиландец Wrchit…
Просмотров: 2992
PIC для младенца (PIC12F629, asm)
07.12.2007
Назначение: Разработанное устройство предназначено для звуковой сигнализации намокания пеленок малыша. Как и памперсы, оно не…
Просмотров: 2627
Кодовый замок на PIC микроконтроллере (PIC16F84, asm)
09.08.2008
Устройство кодового замка для разнообразных применений. В частности, я использую замок дома. Внешнее исполнение может быть любым, в…
Просмотров: 3383
Охранное устройство с управлением ключами-таблетками iBUTTON (PIC16F84, asm)
09.08.2008
Предлагаемое устройство может выполнять функции охранной сигнализации или просто включать освещение при движении человека в…
Просмотров: 2894
Кодовый замок на PIC16F84 (PIC16F84)
09.08.2008
Схема этого устройства (разработчик — Jon Rck из США) размещена по адресу http://www. vermontficks.org/pic.htm К младшим разрядам портов А и В…
vermontficks.org/pic.htm К младшим разрядам портов А и В…
Просмотров: 3659
Охранная система MICROALARM (PIC16F84)
09.08.2008
Данное устройство предназначено для охраны квартир, дач, гаражей и т.д. Основой охранной системы является PIC-контроллер 16F84A. Постановку…
Просмотров: 2283
Электронный замок с ключом-таблеткой I-BUTTON (PIC16F627A (628A, 648A), asm)
09.08.2008
Здесь представлена схема электронного замка, в котором в качестве ключа используется устройство DS1990A(Touch Memory). Touch Memory типа DS1990A…
Просмотров: 4539
Охранное устройство с оповещением по телефонной линии (PIC16F628)
09.08.2008
Устройство предназначено для охраны помещения ( магазин , квартира ) с применением датчика движения и датчика открывания двери (…
Просмотров: 2980
Электронный замок с управлением от таблеток iBUTTON (PIC16F628A, C)
09.08.2008
Ниже представлена схема замка с использованием электронных ключей Touch Memory типа DS1990A. Устройство собрано на базе микроконтроллера…
Устройство собрано на базе микроконтроллера…
Просмотров: 4742
Охранное устройство с управлением от таблеток iBUTTON (PIC16F628A)
09.08.2008
Ниже представлена схема охранного устройства с использованием электронных ключей Touch Memory типа DS1990A. Устройство собрано на базе…
Просмотров: 3480
GSM сигнализация (PIC16F628A)
09.08.2008
Данная страничка посвящена разработке экономичной GSM сигнализации с использованием телефона Siemens 35/45 серий и 8-разрядного…
Просмотров: 6837
Автомобильный охранный сигнализатор на микроконтроллере (PIC16F84A, asm)
08.08.2008
Это устройство отличается от подобных отсутствием времязадающих RC- цепей. Поскольку его основой служит микроконтроллер, оно…
Просмотров: 4010
Инвертор для однофазного асинхронного электродвигателя (PIC16F73, asm)
29.08.2010
Инвертор предназначен для управления скоростью и направлением вращения выходного вала однофазных асинхронных электродвигателей типа. ..
..
Просмотров: 6353
Блок питания с микроконтроллерным управлением (PIC16F628A, asm)
24.05.2008
Состоит из блока индикации и управления, измерительной части и блока защиты от КЗ.
Блок индикации и управления.
Индикатор – ЖКИ…
Просмотров: 11143
Стенд для тестирования ATX блоков питания, методом снятия кросс-нагрузочных характеристик (PIC16F84A, asm)
19.04.2008
Цель проекта – разработка аппаратной части и программного обеспечения стенда для автоматического тестирования АТХ блоков питания…
Просмотров: 6327
Зарядное устройство на PIC микроконтроллере (PIC12F675)
24.01.2008
Данное зарядное устройство (ЗУ) автоматизирует процесс зарядки аккумуляторов. Если аккумулятор не разряжен до напряжения 1 В, оно…
Просмотров: 7337
Регулируемый биполярный блок питания на микроконтроллере 0…15 В (PIC16F84A)
08.12.2007
Предлагаю вашему вниманию биполярный блок питания для повседневных нужд радиолюбителей, который имеет регулировку выходного. ..
..
Просмотров: 5904
COM to MIDI или преобразование скорости USART (PIC16F828A, asm)
08.03.2009
К сожалению, практически все переносные компьютеры не оборудованы приёмопередатчиком MPU-401. В связи с этим, подключать их обычным…
Просмотров: 3112
GTP USB Lite PIC программатор (PIC18F2550)
19.02.2011
Данный программатор с оригинальным названием GTP USB Lite разработан для прошивки PIC микроконтроллеров и микросхем памяти. Основной…
Просмотров: 11573
Устройство ввода вывода (PIC16F628A)
02.12.2010
Это устройство ввода вывода, применять можно в любых целях, где нужны кнопки и индикация. Устройство позволяет выводить на индикаторы…
Просмотров: 3054
Электронная записаня книжкa (PIC12F84, С)
02.12.2010
Новая элементная база позволяет создавать компактные и экономичные устройства, способные с помощью персонального компьютера…
Просмотров: 3146
Микроконтроллерная система управления токарным станком 16Б25ПСп (PIC16F876, C)
02. 12.2010
12.2010
Штатная система управления станком 16Б25ПСп разработана в 70-е годы и была реализована на тиристорно – транзисторной элементной базе. В…
Просмотров: 4781
ИК пульт ДУ для Canon, Nikon, Minolta, Pentax, Olympus (PIC12F629, asm)
02.12.2010
Некоторые фотокамеры фирм Canon, Nikon, Minolta, Pentax, Olympus имеют функцию дистанционной съёмки с помощью инфракрасного пульта дистанционного…
Просмотров: 3662
Инвертор для однофазного асинхронного электродвигателя (PIC16F73, asm)
29.08.2010
Инвертор предназначен для управления скоростью и направлением вращения выходного вала однофазных асинхронных электродвигателей типа…
Просмотров: 6353
Светодиодное табло “Волшебная палочка” (AT89C2051/PIC18C84, asm)
06.11.2010
За этим замысловатым названием кроется очень интересная конструкция на PIC-контроллере. Главное достоинство – это оригинальность идеи. В…
Просмотров: 4449
Устройство управления яркостью 8 светодиодов (PIC16F628, asm)
11. 10.2010
10.2010
По заданной программе изменяется яркость светодиодов. Изменение яркости осуществляется широтно-импульсной модуляцией (ШИМ). Так как…
Просмотров: 2732
Световое табло с круговой механической разверткой (PIC16F84A)
21.08.2008
Предлагаемое табло с помощью небольшого числа светодиодов создает относительно сложные графические изображения, для которых при…
Просмотров: 4970
Термометр на TC77 (PIC16F628, C)
11.10.2010
Такой термометр подходит для большинства потребностей измерения температуры в быту. Но не смотря на то, что он очень прост и дешев,…
Просмотров: 3873
Термометр на PIC (PIC16F628A)
29.10.2008
Ниже представлена схема простого термометра на PIC’е. Индикатор (в моём случае BA56-12SRWA) используется с общим анодом.
Датчик температуры…
Просмотров: 10021
Аппаратно-программный комплекс многоточечного мониторинга температуры (PIC16F84A, asm)
19. 04.2008
04.2008
Цель проекта – разработка системы многоточечного мониторинга температуры, причем наблюдение за температурой должно быть доступным…
Просмотров: 3428
Цифровой термометр с выводом показаний на компьютер (PIC16F84A, asm)
19.04.2008
В качестве датчика температуры используется микросхема цифрового термометра DS18S20, который опрашивается контроллером на основе PIC16F84A….
Просмотров: 5199
Термометр с функцией таймера или управления термостатом (PIC16F84A, asm)
22.01.2008
Описания различных электронных цифровых термометров неоднократно публиковались на страницах журнала «Радио». Как правило, они…
Просмотров: 4481
Термореле с цифровым датчиком температуры (PIC16F84A)
18.11.2007
Термодатчики повсеместно используются в различных областях электроники. Это термометры, пожарные датчики сигнализации, мониторинг…
Просмотров: 3751
Микроконтроллеры pic для начинающих: схемы, программирование
Atmel Studio
Интегрированная среда разработки (IDE) от компании Atmel для разработки приложений под микроконтроллеры ARM Cortex-M и AVR. Freeware
Freeware
AVRDUDE
Консольная программа для считывания, изменения и записи содержимого памяти микроконтроллеров архитектуры AVR, применяющая технологию внутрисхемного программирования. Есть русифицированные графические оболочки. Freeware
WinAVR
Мощная среда разработки с открытым исходным кодом, созданная с целью написания программ для микроконтроллеров серии AVR от компании Atmel. Freeware
BASCOM-AVR
Среда разработки программного кода для микроконтроллеров серии AVR компании Atmel на языке, подобном стандартному Бейсику. Freeware (бесплатная с ограничением на код 4 кБ) и Shareware
CodeVisionAVR
IDE для AVR микроконтроллеров. Из основных достоинств CodeVisionAVR можно отметить то, что он не слишком сложен для самостоятельного освоения, поддерживает все многочисленное семейство микроконтроллеров AVR, формирует емкий и результативный программный код. Платная, есть бесплатная Evaluation-версия с ограничением на код 4 кБ.
VMLAB
Инструмент для разработки и отладки программного кода, а также моделирования работы радиотехнических устройств на базе AVR микроконтроллеров. Freeware
MPLAB
Единая бесплатная интегрированная среда разработки для контроллеров производства Microchip
MPIDE
Среда разработки, выполненная на базе открытой системы Arduino IDE и предназначенная специально для контроллеров PIC32 от компании Microchip Technology.
WinPic800
Небольшой, но весьма эффективный бесплатный программный пакет для прошивки PIC-микроконтроллеров различных серий. Есть русский язык.
PICPgm
Простое программное обеспечение для прошивки PIC-микроконтроллеров, отличающееся стабильностью, качеством и скоростью программирования. Freeware
CooCox CoIDE
Бесплатная высокоинтегрированная программная среда, предназначенная для разработки кода микроконтроллеров архитектуры ARM и др.
Keil uVision
Среда разработки, представляющая собой набор утилит для выполнения полного комплекса мероприятий по написанию программного обеспечения для микроконтроллеров различных семейств. Платная, но есть демоверсия с рядом ограничений, в т.ч. на размер кода — не более 32 КБ.
Платная, но есть демоверсия с рядом ограничений, в т.ч. на размер кода — не более 32 КБ.
IAR Embedded Workbench
Многофункциональная среда разработки приложений на языках C, C++ и ассемблере для целого ряда микроконтроллеров от различных производителей. Среда разработки платная, но бесплатная версия с ограничениями на размер кода в зависимости от микроконтроллера.
Flowcode
Один из передовых графических языков программирования для микроконтроллеров. Поддержка русского языка. Платная, но есть бесплатная версия с ограничениями и только для микроконтроллеров PIC.
Algorithm Builder
Бесплатная графическая среда программирования для разработки приложений под микроконтроллеры с архитектурой AVR от отечественных разработчиков.
MikroC
Мощнейшая среда разработки программ для микроконтроллерных устройств, включающая редактор кода, компилятор, отладчик, программные и аппаратные библиотеки, использующие готовые функции. Программа платная.
Есть бесплатная версия с ограничениями.
mikroPascal
Мощная среда разработки приложений на языке Паскаль для различных архитектур микроконтроллеров. Программа платная. Есть бесплатная версия с ограничениями на размер кода (до 4096 байт).
mikroBasic
Среда разработки программ на языке Бейсик для микроконтроллеров различных производителей. Программа платная от 199$. Есть бесплатная версия с ограничениями на размер кода (до 4096 байт).
MicroCode Studio Plus
Программа для создания и отладки кода, написанного на языке программирования BASIC, под PIC-микроконтроллеры. Программа платная 50$. MicroCode Studio – облегченный, бесплатный вариант с ограничением на кол-во строк кода.
IC Prog
Одна из самых популярных бесплатных оболочек для программирования, поддерживающая огромное число микроконтроллеров, ППЗУ и адаптеров различной конструкции. На русском языке.
Pony Prog 2000
Нетребовательная и многофункциональная программа — программатор, предназначенная для работы с микроконтроллерами и постоянными запоминающими устройствами с последовательным доступом различных производителей. На русском языке.Freeware.
На русском языке.Freeware.
SinaProg
Графическая оболочка для программы AVRdude, включающая в себя простой и функциональный AVR fuse-калькулятор. Freeware.
AVR8 Burn-O-Mat
Графическая оболочка для популярной программы AVRDUDE, использующейся при прошивке микроконтроллеров компании Atmel. Freeware.
Khazama AVR Programmer
Небольшая программа, созданная с целью быстрой прошивки микроконтроллеров Atmel AVR. Freeware.
UniProf
Простой, бесплатный, универсальный программатор для микроконтроллеров семейства AVR.
eXtreme Burner — AVR
Бесплатное программное обеспечение, предназначенное для прошивки AVR-микроконтроллеров.
Code Composer Studio
Интегральная среда проектирования, предназначенная для создания программного обеспечения, использующегося в процессорах и микроконтроллерах компании Texas Instruments Incorporated. Программа платная, бесплатная версия CCS-FREE с рядом ограничений.
TivaWare
Набор высококачественных, полноценных библиотек для контроллеров семейства TIVA от Texas Instruments. Freeware.
FastAVR
Один из лучших компиляторов Basic-подобного языка для серии восьмибитных микроконтроллеров AVR.
Atollic TrueSTUDIO
Интегрированная среда разработки программ для ARM-процессоров, включающая в себя GNU компилятор и отладчик. Среда разработки платная, но есть бесплатная версия TrueSTUDIO Lite с рядом ограничений.
Sourcery CodeBench
Самодостаточная интегрированная среда разработки, предназначенная для создания приложений на C/C++ для IA32, ColdFire, Power, MIPS, ARM и некоторых других архитектур микроконтроллерных устройств. Платная 400$ (есть 30-дневная ознакомительная версия)
CODESYS
Программно-инструментальный комплекс, основанный на стандарте IEC 61131-3 и предназначенный для программирования промышленных контроллеров и компьютеров. На русском языке. Freeware.
Flash Magic
Бесплатное приложение для программирования микроконтроллеров компании NXP Semiconductors
STEP 7-Micro/WIN
Простое и удобное программное обеспечение, созданное для работы с программируемыми контроллерами серии SIMATIC S7-200 компании Siemens AG. Платная.
Платная.
PIC Simulator Studio
многофункциональное и высокопроизводительное программное обеспечение, предназначенное в первую очередь для симуляции в реальном времени цифровых и аналого-цифровых схем, ядром которых выступает микроконтроллер PIC micro. Бесплатное
PIC Simulator IDE
Программа, предназначенная для отладки кода контроллеров microPIC компании Microchip Technology. Платная от 39 евро (есть ознакомительная версия с ограничениями)
4D Workshop IDE
Специализированная программная среда, предназначенная для работы с микропроцессорами в графических контроллерах и готовых дисплейных модулях компании 4D Systems. Freeware.
Программирование микроконтроллеров семейства PIC начинающим
Первые микроконтроллеры появились в 60-х годах. Автоматизированные системы до этого времени обычно строились на основе реле. В принципе, релейные системы исполняли требуемую функцию вполне успешно.
Однако главным недостатком релейных схем являлись сложности модернизации на случай изменения функциональности. Для инженеров проще было собрать новую релейную систему, нежели модифицировать уже существующую.
Для инженеров проще было собрать новую релейную систему, нежели модифицировать уже существующую.
В этом смысле программируемый логический контроллер оказался куда более предпочтительным устройством. Теперь программируемые логические контроллеры распространены повсеместно. Однако тонкости программирования таких систем остаются малопонятными для многих радиолюбителей.
Рассмотрим этот важный момент – как программировать контроллер на примере широко известной серии ПЛК (PLC — Peripheral Interface Controller): продукта компании Microchip Technology Inc.
Общий взгляд на устройства ПЛК
Системы на базе микропроцессора (микроконтроллеры) выступают в качестве программируемых электронных устройств, для которых специально разработаны языки программирования.
Благодаря таким языкам программирования, существенно облегчается процесс программирования контроллеров. Язык высокого уровня, созданный для ПЛК, обеспечивает простоту, эффективность и дружелюбную среду для пользователя.
Микропроцессор фактически можно рассматривать электронной схемой, поддерживающей обработку команд, хранящихся в системной памяти. Эта же схема работает с инструкциями — арифметическими и логическими, использует внешние устройства:
- память,
- входные порты,
- выходные порты.
В свою очередь, микроконтроллер представляет собой интегральную схему, в составе которой присутствуют:
- микропроцессор,
- память программ и данных,
- генератор тактовых импульсов,
- интерфейсы ввода и вывода,
- таймеры,
- аналого-цифровые преобразователи,
- внешние коммуникационные порты и другие схемы.
Макрос языка высокого уровня — это инструкция, которая является сокращённой строкой, содержащей несколько инструкций. Запись программы с повторяющимися действиями (схожестью инструкций) при использовании макросов значительно сокращается.
PIC18F4550
Программируемые микроконтроллеры используются в составе современной электроники повсеместно. Умение работать с этим функциональным инструментом открывает широкие горизонты
Умение работать с этим функциональным инструментом открывает широкие горизонты
Эффективность программы на основе макросов столь же эффективна, как и запись программы на языке «C». Компилятор отвечает за создание соответствующих подстановок для генерации кода, который передаётся в память программы микропроцессора или микроконтроллера.
Программирование широко распространённых микроконтроллеров PIC12 / PIC16
Микроконтроллеры PIC программируются с использованием проприетарного последовательного протокола. Поэтому конечному пользователю недостаточно просто взять и подключить микросхему контроллера PIC напрямую к любому «стандартному» интерфейсу.
Однако технические требования относительно программирования по времени достаточно слабы. Этот фактор даёт возможность использовать некоторые выводы параллельного или последовательного порта компьютера для генерации программной последовательности с помощью программного обеспечения.
Помимо рабочего напряжения, микроконтроллерам требуется ещё три сигнала:
- Программируемое напряжение (около 13В).

- Таймер программирования (ICSPCLK).
- Данные (ICSPDAT).
Поскольку большинство выпускаемых экземпляров PIC допускают программируемое напряжение несколько ниже значения, указанного спецификацией, открывается возможность использования уровней сигналов ± 12В, присутствующих на интерфейсе последовательного порта настольного ПК. Таким образом, «записать» PIC вполне допустимо без необходимости подключения дополнительного источника питания.
Преобразование уровней допускается выполнять при помощи нескольких компонентов. Однако представленная ниже упрощённая схема, обладает некоторыми ограничениями.
В частности, позволяет считывать и программировать непосредственно PIC устройства.
Нет никакой гарантии, что эта схема способна обеспечить программирование всех контроллеров, поскольку не соответствует полной спецификации программирования.
ISD1700
Схема принципиальная упрощённого программатора микроконтроллеров серии PIC и обозначенные линии подключения интерфейсов RS232 / ISSP
Внутрисхемное программирование микроконтроллера PIC
Разъём внутрисхемного программирования (ICSP) предоставляет возможность запрограммировать микроконтроллер непосредственно в рамках прикладной схемы. Этот вариант видится особенно полезным в домашних условиях или в другой не специальной среде, где по каким-либо причинам требуется повторное изменение программированием PIC и тестирование схемы.
Этот вариант видится особенно полезным в домашних условиях или в другой не специальной среде, где по каким-либо причинам требуется повторное изменение программированием PIC и тестирование схемы.
Применение разъёма ICSP позволяет избежать рисков при перемещении микроконтроллера PIC между различными гнездами (например, в случае изгиба контактов или воздействия на микроконтроллер электростатических разрядов). Также работа с разъёмом ICSP обеспечивает экономию времени.
PIC K150 ICSP
Вот такой вариант ICSP соединителя вполне подойдёт для подключения линий связи на случай выполнения программирования микроконтроллера серии PIC12/PIC16
Следует внимательно использовать интерфейс и кабель ICSP, принимая во внимание, что схема не должна нарушать ход сигналов программирования. Другими словами – точное соответствие месту назначения сигналов необходимо выполнять безукоризненно.
Основные условия программирования:
- время переключения напряжения программирования «0 – 13В» составляет несколько микросекунд;
- полный размах напряжения сигналов таймера и данных достигается в течение одной микросекунды;
- вывод сигнала PGM остаётся низким всё время программирования.

Некоторые микроконтроллеры PIC требуют применения напряжения программирования до подачи рабочего напряжения. В этом случае напряжением программирования управляют через модуль программатора. Самый простой способ выполнить первые два условия — не использовать корреспондирующие выводы в цепях схемы. Если необходимо, следует использовать отладчик.
Рекомендации относительно процедуры программирования
Не рекомендуется подключать активные цепи к линии внешнего (основного) сброса (MCLR – Microcontroller Line Reset).
Если сигнал MCLR используется для сброса PIC, следует устанавливать резистор номинальным сопротивлением более 56 кОм между выводами MCLR и подачи напряжения питания.
Рекомендуется в цепь резистора включать конденсатор небольшой ёмкости — менее 100 пФ со смещением на землю (вывод GND).
Сигнальные выводы программирования должны исключать наличие индуктивной или ёмкостной нагрузки. Когда рабочее напряжение питания берётся от модуля программатора, требуется изолировать вывод питания PIC от остальной части прикладной схемы в процессе программирования.
TL866II USB
Схемные доработки программатора микроконтроллера, рекомендуемые с целью обеспечения более качественного процесса программирования устройства
Этот вариант может иметь место, если схема содержит собственный стабилизатор напряжения питания и оснащается развязывающим конденсатором большой ёмкости. Модуль программатора, предназначенный под напряжение питания 3,3В, не в состоянии заряжать конденсатор достаточно быстро, а для программирования PIC требуется не менее 4,5В.
Между тем вариант изолирования можно исключить, если в схеме используется диод Шоттки. Чтобы удерживать вывод перевода микроконтроллера в режим программирования (PGM) на низком уровне, рекомендуется подключать этот вывод к земле через резистор номиналом от 2,2 кОм до 10 кОм.
Всегда рекомендуется таймер включения питания вносить в «слово» конфигурации. Задержка таймера более 40 мс даёт достаточно времени для стабилизации напряжения питания перед началом любой операции. Такой шаг позволяет избежать непреднамеренного выполнения программы до входа в режим программирования.
Такой шаг позволяет избежать непреднамеренного выполнения программы до входа в режим программирования.
Во время программирования остальные контакты порта остаются в режиме ввода — имеют высокий импеданс. Используемой схемой необходимо обрабатывать такое состояние по возможности неактивным способом. Чтобы избежать нежелательных «побочных эффектов», следует рассмотреть возможность дополнения подтягивающими резисторами.
Для обеспечения повторного программирования микроконтроллера PIC в условиях напряжения питания ниже 4,5В, область памяти необходимо отключить от защиты. Это обусловлено применением «Chip Erase», единственного способа удаления кода или защиты данных, которого требуют практически все микроконтроллеры PIC с напряжением питания выше 4,5В.
Сигналы ICSP соответствующие контактам PIC 12Fxxx / 16Fxxx
Число ниже аббревиатуры сигнала соответствует выходу разъема ICSP модуля программатора. Для использования модуля с тестовыми платами сторонних производителей требуется адаптер.
АДАПТЕР
Следует обратить внимание: разъём ICSP этого модуля программатора имеет различный порядок сигналов по сравнению с другими программаторами микроконтроллеров PIC
Следующие схемы показывают, как подключать сигналы программирования к микроконтроллерам PIC 12Fxxx / 16Fxxx:
ARDUINO UNO
Схемы, определяющие порядок подключения сигнальных проводников, участвующих в процедуре чтения/записи данных микроконтроллеров разной конфигурации
Фирменные средства программирования
Существует солидная группа фирменных программаторов для микроконтроллеров семейства PIC. Наиболее известные аппаратные средства:
- REAL ICE
- Pickit 1-2-3
- IC PROG
- ICD 2-3-4
Характерные отличия отмеченных программаторов – устройства обладают не просто классическими функциями чтения/записи. Фирменным программаторам присущ целый ряд расширенных функций, включая полный контроль содержимого памяти и стёка.
На основе информации: Uolsinectis
PIC Урок 1.
 Знакомство с семейством PIC
Знакомство с семейством PIC- Урок 1
- Наконец-то сегодня нашлось время познакомить вас с ещё одним семейством микроконтроллеров – это микроконтроллеры PIC.
- Данные микроконтроллеры также являются очень известными, устанавливаются во многие устройства и давно уже снискали у радиолюбителей очень сильный интерес.
- Разработчиком данного семейства является компания Microchip, которая также ялвяется очень известной и её продукция востребована по всему миру.
Изучение данной серии контроллеров является очень нелёгким вопросом, я этим заниматься начал уже давно, но нормально разобрался с линейкой только сейчас. Последнее время я немного ускорил процесс изучения микроконтроллеров PIC благодаря вашим просьбам в группах и чатах, на которые я не мог не откликнуться.
Также к тому, чтобы поделиться своими знаниями в области программирования данной линейки, меня подтолкнуло то, что я видел много блогов, уроков (в том числе и видео) очень хорошего качества по контроллерам PIC именно с использованием языка ассемблер. А вот на языке C уроков очень мало, что подчёркивает их востребованность.
А вот на языке C уроков очень мало, что подчёркивает их востребованность.
Поэтому замечу, что программировать МК PIC мы будем именно на языке C. Какую мы выберем среду программирования и компилятор, мы решим чуть позже, а пока же в данном уроке нас ждёт краткое знакомство с самими контроллерами, с их архитектурой и их разновидностями.
Разновидностями контроллеров мы будем считать их деление по архитектуре. Примем за основу разрядность их ядра.
Например, те контроллеры AVR, с которыми мы до сих пор работаем, являются 8-битными, а контроллеры STM, которые мы изучаем – 32-битными.
Вот и контроллеры PIC также делятся по битности.
Первая линейка – это 8-битные контроллеры PIC. Наименование их моделей начинается с префикса PIC10/PIC12/PIC16.
Данная линейка также делится на 3 семейства.
1. BASELINE – данная архитектура присутствует у контроллеров PIC10. От более мощной серии она отличается количеством выводов (от 6 до 28), дешевизной.
2. MID-RANGE – данную архитектуру имеют ядра микроконтроллеров PIC12/PIC16. Количество выводов в данной серии увеличено (от 6 до 64), стоят они несколько дороже, зато имеют помимо 35 машинных инструкций, поддерживаемых серией BASELINE, ещё 14 дополнительных инструкций (оптимизированных под компилятор языка C).
Также у данной серии производительность увеличена на 50%, они имеют более глубокий и улучшенный аппаратный стек, увеличенный объём памяти и некоторые прочие прелести, с которыми мы познакомимся в дальнейшем, так как, скорее всего, мы с данной серии и начнём процесс изучения программирования микроконтроллеров PIC.
3. 8-битовые микроконтроллеры PIC18 – это улучшенная серия контроллеров, здесь на борту много другой периферии, количество выводов от 18 до 100, производительность 16 MIPS, поддержка технологии NanoWatt, наличие программироуемого генератора.
Вторая линейка – это 16-битные контроллеры PIC. Они имеют префикс PIC24F и PIC24H. Это уже более мощные контроллеры.
Они имеют префикс PIC24F и PIC24H. Это уже более мощные контроллеры.
В отличие от первой линейки, машинная команда выполняется уже не за 4 такта генератора, а за 2.
Также периферия еще более расширена по разновидностям шин, прямой доступ к памяти DMA (у PIC24H), расширенный набор инструкций. Также есть очень много других особенностей.
Третья линейка – это 32-битные контроллеры. Префикс у них уже PIC32. Частота тактирования таких контроллеров до 120 МГц, а у новой серии MZ – до 200 и даже выше.
У меня, например, есть отладочная плата, на которой устрановлен контроллер PIC32MZ2048EFH064, у которого тактовая частота составляет 252 мегагерца. Также здесь ещё более увеличена производительность ядра.
Данное семейство построено на ядре MIPS32®, которое также кроме высокой производительности отличается ещё и низким потреблением энергии.
Вообщем, вот такие вот краткие характеристики существующих на данный момент контроллеров PIC. Если брать по наименованиям, то наименований очень много, на любой, как говорится, вкус.
Если брать по наименованиям, то наименований очень много, на любой, как говорится, вкус.
Также, как и рассмотренные, а также рассматриваемые нами контроллеры AVR и STM32, контроллеры PIC работают приблизительно по той же схеме.
Сочиняется программа, собирается в машинный код, понятный арифметическо-логическому устройству контроллера, загружается (прошивается или заливается) в контроллер и затем обеспечивает работу по определённому алгоритму.
Основной интерфейс, используемый для прошивки данных контроллеров – это ICSP, предназначенный для внутрисхемного программирования. Подробнее с ним мы познакомимся, когда будем прошивать данные контроллеры.
Давайте немного разберёмся с организацией памяти в контроллерах PIC. Так как мы начнём изучение семейства PIC с более простых 8-битных (принцип от простого – к сложному ведь не отменял никто), то и организацию памяти мы посмотрим у данной серии.
Сначала посомтрим блок-схему контроллера на примере МК PIC16F84A (нажмите на картинку для увеличения изображения)
В левом верхнем углу сразу бросается в глаза модуль памяти FLASH, в которой обычно хранится программа контроллера (прошивка). А в правом верхнем углу мы видим память EEPROM, которая уже исользуется для хранения данных.
А в правом верхнем углу мы видим память EEPROM, которая уже исользуется для хранения данных.
Эти два вида памяти являются энергонезависимыми и после отклчения и сброса контроллера не стираются.
Но данная память не является быстрой, поэтому код при старте программы распределяется уже в память RAM (ОЗУ), которая уже является быстродействующей и предназначена для функционирования контроллера при работе. Поэтому данную память мы уже рассмотрим несколько поподробнее.
Оперативная память контроллера PIC делится на память программ и память данных.
Вот так организована память программ у контроллера PIC16F84A
Микроконтроллеры данной серии имеют счётчик команд, способный адресовать 8К x 14 слов памяти программ и 14-разрядную шину данных памяти программ. Вся память программ разделена на 4 страницы по 2 килослов каждая (0000h-07FFh, 0800h-0FFFh, 1000h-17FFh, 1800h-1FFFh).
Ну это общая информация, поэтому у тех контроллеров, у которых память небольшая перемещение между данными страницами приведёт к циклической адресации.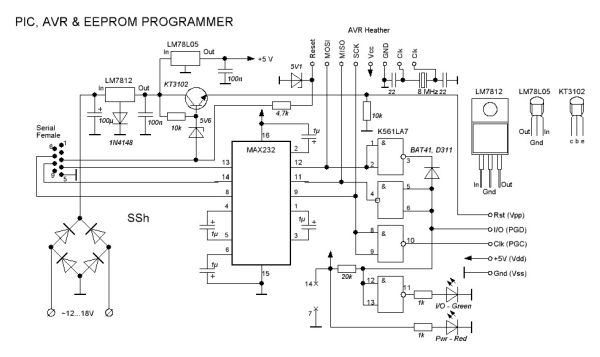 Поэтому размер памяти того контроллера, который мы хотим программировать, мы обязаны знать твёрдо.
Поэтому размер памяти того контроллера, который мы хотим программировать, мы обязаны знать твёрдо.
В общем случае память программ состоит из счётчика команд, стека нескольких уровней, память для хранения векторов прерываний, а также внутренней памяти программ.
Также немного познакомимся с организации оперативной памяти, отведённой под хранение данных.
Память данных разделяется на регистры общего назначения и регистры специального назначения. Посмотрим, как организована память данных контроллера PIC16F84A
Регистры специального назначения (SFR) – это регистры, которые предназначены для хранения строго отведённых величин и имеют определённые имена. С ними мы будем знакомиться постепенно, когда будем писать какой-то исходный код, который будет широко их использовать.
Регистры общего назначения (GPR) – это ячейки памяти, которые имеют только адреса и предназначены они для хранения любых данных.
Также из приведённого выше рисунка мы видим, что у нашего контроллера память данных разделена на 2 страницы (или банка) переход между которыми осуществляется посредством установки определённых битов в регистре STATUS. Поэтому данный регистр присутствует в обеих банках и обратиться к нему мы можем в любой момент, чтобы сменить текущую страницу памяти.
Поэтому данный регистр присутствует в обеих банках и обратиться к нему мы можем в любой момент, чтобы сменить текущую страницу памяти.
Адресация может быть как прямая, так и косвенная или относительная, когда адрес отсчитывается относительно текущего адреса. С этим мы возможно не будем знакомиться, так как такая задача возникает у программистов, которые пишут программы на ассемблере.
Соответственно, у каждого контроллера кроме памяти существует много чего ещё интересного, в том числе порты ввода-вывода. Наши контроллеры PIC – также не исключение. Посмотрим назначение ножек контроллера PIC16F84A
У данного контроллера два порта – порт A и порт B. Из порта A наружу выведены 5 ножек – RA0-RA4, а из порта B – все 8 ножек RB0-RB7.
Также ножки портов могут иметь и другое назначение в зависимости от того, как мы их сконфигурируем. Наример ножка 6 или RB0 может в любой момент превратиться в ножку для захвата внешних прерываний, а ножка 3 или RA4 – стать ножкой для тактирования таймера от внешнего генератора.
Тактирование МК PIC также может осуществляться как от внешнего генератора, так и от кварцевого резонатора, от внутреннего резистора, а также существует ещё несколько вариантов, которые поддерживают не все контроллеры данного семейства. На практике как правило используется тактирование от кварцевого резонатора. Скорее всего, мы также последуем данной традиции в наших дальнейших занятиях.
Думаю, на этом мы закончим знакомство с контроллерами PIC. Знакомство получилось кратким, но на первое время нам и этого хватит за глаза. С более расшифрованной информацией мы столкнёмся, когда будем сочинять наши программы.
Так что ждите следующих занятий, которые обещают быть очень интересными.
Мы познакомимся сначала с установкой среды и компилятора, изучим, как с ними работать, какие тонкости программирования присутствуют в настройках различной периферии, а также в работе с ней.
- Программирование МК PIC Следующий урок
- Смотреть ВИДЕОУРОК (нажмите на картинку)
Примеры программирования микроконтроллеров
Новостная лента
| Microchip расширяет экосистему Arduino-совместимой отладочной платформы chipKIT | ||
| Компания Microchip сообщила о расширении экосистемы отладочной платформы chipKIT. В состав Arduino-совместимой платформы chipKIT вошла высокоинтегрированная отладочная плата с Wi-Fi модулем и плата расширения для управления электродвигателями, разработанные компанией Digilent. Подробнее >>> | ||
| �сточник: http://www.rlocman.ru | Просмотров: 28590 | Дата добавления: 02.10.2014 |
| MicroView — супер миниатюрная Arduino-совместимая отладочная плата СЃ OLED дисплеем | ||
| РќР° портале Kickstarter представлен проект супер миниатюрной отладочной платформы Arduino, выполненной РІ форм-факторе 16-выводного РєРѕСЂРїСѓСЃР° DIP Рё имеющей встроенный OLED дисплей СЃ разрешением 64×48 точек. Несмотря РЅР° то, что отладочная плата является полностью завершенным решением, РѕРЅР° может устанавливаться РЅР° макетную плату или непосредственно впаиваться РІ печатную плату для расширения функционала Рё управления внешней периферией. Подробнее >>> | ||
| �сточник: http://www.rlocman.ru | Просмотров: 27934 | Дата добавления: 17.04.2014 |
| Размеры самого миниатюрного в мире ARM-микроконтроллера Freescale сократила еще на 15% | ||
| Freescale Semiconductor совершила новый технологический прорыв, добавив Рє семейству Kinetis самый миниатюрный Рё энергоэффективный РІ РјРёСЂРµ 32-разрядный микроконтроллер Kinetis KL03 СЃ архитектурой ARM. Основанный РЅР° микроконтроллере предыдущего поколения Kinetis KL02, новый РїСЂРёР±РѕСЂ получил дополнительную периферию, стал намного проще РІ использовании, Рё РїСЂРё этом сократился РІ размерах РґРѕ 1.6 × 2.0 РјРј. Подробнее >>> | ||
| �сточник: http://www.rlocman.ru | Просмотров: 1871 | Дата добавления: 17.04.2014 |
| Как вырастить микросхему с помощью белка | ||
| Без кремния немыслимо производство полупроводников, где он буквально нарасхват. При этом, естественно, большое значение имеют чистота вещества и строение кристаллов кремниевых соединений. �сследователи из Университета Лидса (Великобритания) предлагают способ выращивания таких кристаллов с помощью молекулярной биологии. По их мнению, это позволит создавать электронные микросхемы более высокого качества. Подробнее >>> | ||
| �сточник: http://www.newscientist.com/ | Просмотров: 3019 | Дата добавления: 06.03.2014 |
| Открытие нового раздела на сайте MCULAB.RU | ||
| На нашем сайте открыт новый раздел. Раздел посвящён моделированию различных схем по сопряжению микроконтроллеров и датчиков. Освещается схемотехника подключения к МК внешних устройств. В данной области до сих пор отсутствует систематизация, поэтому сделана попытка создать банк типовых решений, который в дальнейшем может дополняться, уточняться, расширяться. Подробнее >>> | ||
| �сточник: / | Просмотров: 129718 | Дата добавления: 04.02.2014 |
На сайте представлены примеры программирования, которые будут полезны как для опытного разработчика схем на микроконтроллерах, так и для новичка.
Особо рассматривается программирование микроконтроллеров для начинающих пользователей. Программные примеры программирования разбиты на различные разделы.
Основную массу составляют примеры программирования микроконтроллеров avr и микроконтроллеров microchip.
Пользователю предлагается познакомиться с различными примерами программирования и различными средами программирования: MicroLab, AVRStudio, MikroC, FloweCode.
Представлены схемы на микроконтроллерах ведущих производителей: PIC и AVR. Рассматривается огромное количество схем для начинающих разработчиков. Если Вы начинающий радиолюбитель, то для Вас мы приготовили раздел микроконтроллеры для начинающих.
Современные микроконтроллеры относятся к классу микропроцессорных устройств.
В основе принципа действия таких элементов лежит исполнение последовательного потока команд, называемого программой.
Микроконтроллер получает программные команды в виде отдельных машинных кодов.
Р�звестно, что для создания Рё отладки программ, машинные РєРѕРґС‹ РїРѕРґС…РѕРґСЏС‚ плохо, так как трудно воспринимаются человеком. Ртот факт привел Рє появлению различных языков программирования Рё РѕРіСЂРѕРјРЅРѕРіРѕ количества различных компиляторов.
В основе языков программирования микроконтроллеров лежат классические языки для компьютеров.
Единственным отличием становится ориентированность на работу со встроенными периферийными устройствами. Архитектура микроконтроллеров требует, например, наличия битово-ориентированных команд.
Последние выполняют работу с отдельными линиями портов ввода/вывода или флагами регистров. Подобные команды отсутствуют в большинстве крупных архитектур.
Например, ядро ARM, активно применяемое в микроконтроллерах, не содержит битовых команд, вследствие чего разработчикам пришлось создавать специальные методы битового доступа.
Примеры программирования микроконтроллеров будут представлены на хорошо всем известном языке Си.
А перед тем как постигать азы программирования микроконтроллеров и схемотехнику устройств на микроконтроллерах, авторам предлагается ещё раз вспомнить основы микропроцессорной техники, основы электроники, полупроводниковую электронику, аналоговую и цифровую схемотехнику, а так же азы аналогового и цифрового представления сигнала. Для тех, кому хочется получить новые знания в области современного программирования, можно будет познакомиться с графическим языком программирования LabView.
Выбор языка программирования зависит от множества факторов. В первую очередь, типо решаемых задач и необходимым качеством кода.
Если Вы ведёте разработку малых по объёму и несложных программ, то можно использовать практически любой язык.
Для компактного кода подойдет Ассемблер, а если ставятся серьезные задачи, то альтернативы С/С++ практически нет. Также необходимо учитывать доступность компилятора.
В итоге самым универсальным решением можно назвать связку Ассемблера и C/C++. Для простого освоения языков, можно воспользоваться примерами программ для микроконтроллера.
�спользование примеров программирования упростит и ускорит процесс освоения программирования микроконтроллеров.
Схемы на микроконтроллерах позволят начинающим разработчикам освоить тонкости проектирования, моделирования и программирования микроконтроллеров.
Программирование PIC16F876A. Собираем схему с плавно мигающим светодиодом
Эта статья направлена на новичков в программировании микроконтроллеров семейства PIC16 от Microchip. В нашем случае, я выбрал немного превосходящий микроконтроллер для таких задач, а именно — PIC16F876A. Программирование микроконтроллера будем производить в MPLAB IDE.
Цель работы: собрать схему, которая будет мигать светодиодом, внимание, с применением ШИМ.
И так, цель задачи обозначили. Теперь перейдем к реализации наших планов.
Часть 1. Железо
В первую очередь нам понадобятся компоненты, из которых мы будем собирать схему. А именно:
- Микроконтроллер PIC16F876A
- Рассыпуха к нему
- Светодиод
- Макетная плата
Светодиод можно взять любой по вкусу, какой Вам больше нравится. Макетную плату желательно иметь в наличии.
В понятие «рассыпухи» входят такие детали как: пара конденсаторов для кварца и конденсатор на выход модуля CPP (Для того что бы сгладить пульсации). Собранная схема выглядит следующим образом: Это типовое включение микроконтроллера, ничего нового я тут не придумывал.
Так же, для программирования микроконтроллера я пользуюсь программатором-отладчиком ICD2. Он подключается к компьютеру по USB и прекрасно работает как на системе Windows, так и на GNU/Linux. В нашем случае будем использовать родной MPLAB IDE в Windows.
Скрин в процессе разработки:
Часть 2. Программная
Светодиод подключаем на 1й модуль CPP (ШИМ). За настройку модуля в микроконтроллере отвечает регистр CPP1CON. Чтобы модуль у нас заработал, предварительно необходимо инициализировать таймер. Для режима ШИМ используется таймер TMR2.
За его конфигурацию отвечает регистр T2CON. Инициализация: movlw .
0 bcf STATUS, 5 movwf T2CON ; Помещаем в регистр T2CON — 0 bsf T2CON, 0 ; Устанавливаем бит T2CKPS0 (Предделитель) bsf T2CON, 2 ; Включаем таймер TMR2 битом TMR2ON
bsf T2CON, 3 ; Устанавливаем бит TOUTPS0 (Постделение)
На этом инициализация таймера закончена. Теперь при включении контроллера от будет служить источником для нашего ШИМ модуля. Инициализация ШИМ модуля происходит следующим образом:movlw 00101111b ; Подготавливаем конфигурацию movwf CPPCON ; Конфигурируем ШИМ
bsf CPPCON, 2 ; Включаем модуль ШИМ
Все, на этом инициализация закончена. Теперь мы можем помещать в регистр CPP1L число от 0 до 255, тем самым меняя скважность выходных импульсов. Полный исходник программы для прошивки нашего микроконтроллера: STATUS equ 03h TRISC equ 07h CPPCON equ 17h CPP1L equ 15h T2CON equ 12h counter equ 23h tmp equ 25h org 0 goto start start bsf STATUS, 5 movlw .0 movwf TRISC bcf STATUS, 5 movwf T2CON bsf T2CON, 0 bsf T2CON, 2 bsf T2CON, 3 movlw 00101111b movwf CPPCON bsf CPPCON, 2 movlw .0 movwf CPP1L movlw .255 movwf tmp decfsz tmp, 1 goto $+2 goto $+4 call delay10mS incf CPP1L, 1 goto $-5 movlw .255 movwf tmp decfsz tmp, 1 goto $+2 goto $+4 call delay10mS decf CPP1L, 1 goto $-5 goto $-16 delay10mS movlw .50 movwf counter loop call delay200uS decfsz counter goto loop return delay200uS movlw .100 addlw -1 btfss STATUS,2 goto $-2 return
end
Краткая заметка по командам, использованных в программе. equ — Присвоение имени на определенный адрес. goto — Переход программы на метку, либо определенную строку call — Вызов подпрограммы movlw — Поместить в регистр W, число movwf — Переместить из регистра W число bsf — Установить бит в регистре, в состояние 1 bcf — Установить бит в регистре, в состояние 0 addlw — Прибавить в регистр W число btfss — Проверить бит в регистре на 1 incf — Инкриминировать регистр (прибавить 1) decf — Декриминировать регистр (вычесть 1) decfsz — Вычесть 1 из регистра + проверка на 0 Задержки в программе откалиброваны на частоту кварцевого резонатора в 8мгц. Принцип работы программы. В начале, происходит инициализация регистров, затем настройка внутренних модулей микроконтроллера.
В переменной tmp мы можем задавать скважность, тем самым меняя максимальную яркость светодиода.
Далее реализована часть программы, которая отвечает за само мигание светодиода, с учетом использования ШИМ. Сначала, инкриминируя CPP1L до значения tmp мы заставляем светодиод медленно начать светиться, а затем делаем обратную операцию.
Часть 3. Финальная
Перед тем как прошивать Ваш контроллер, Вам необходимо установит биты конфигурации микроконтроллера. Без них, ничего работать не будет. И так: 1) WDT — выключаем. Это сторожевой таймер.
Предназначен для аппаратного сброса микроконтроллера в момент непредвиденного зависания. 2) LWP — выключаем. Это низковольтное программирование. Мы используем нормальный программатор, который подает на MCLR 13В.
3) Осцилятор: В данном случае мы имеем 8мгц. Значит ставим значение XT.
Часть 4. Бонусная
Видео для тех, кто еще не программировал/не собирал схемы, но очень хочет увидеть результат:
Часть 5. Информация
Микроконтроллер в цепи последовательного программирования (ICSP) с Microchip PIC и Atmel AVR | Lirtex — Технология на краю времени
Метки: AVR , Электроника , Embedded , ICSP , микроконтроллер , PIC
В цепи последовательного программирования является метод прямого программирования микроконтроллеров PIC и Atmel AVR в то время как они подключены к схеме, в отличие от программирования чипа впереди, и только после этого пайка его цепи. Есть много преимуществ для ICSP, а также некоторые важные соображения дизайна, которые я постараюсь выделить.
В схеме программирования имеет много преимуществ:
- Это сокращает цикл разработки — это действительно раздражает взять чип из платы каждый раз необходимо перепрограммировать, а это еще сложнее с SMD.
- Позволяет клиенту и обновления прошивки поле
- Калибровка системы в процессе производства или в сфере
- Назначение уникального идентификатора серийный номер продукта
Как подготовить схему для работы с ICSP?
Программист использует последовательный сигнализации схема для программирования чипов в цепи. Сигнализация осуществляется через программирование часов (PGC или ICSPCLK) и программирования данных (ПГД или ICSPDAT) контакты. Кроме того, MCLR / VPP вывод использоваться как сигнал высокого напряжения программирования или внимания индикатора на устройстве.
Везде, где приложение позволяет использовать выделенные контакты для ICSP. Это сэкономит вам много неприятностей. Не разделяя вывод как для ICSP и ввода / вывода, например, свести к минимуму подготовительные работы, который необходимо сделать, чтобы ICSP.
Часто, и особенно с низким устройства PIN-код, не представляется возможным выделить 3 необходимых контактов только для ICSP, а когда хотят их иметь двойной функциональностью.
В этом случае:
1. Изолировать Vpp от схемы с использованием диодов Schotkey и R / C. Примечание: в некоторых устройствах, например, PIC12F629, этот вывод будет определяться до 13 вольт программист при программировании устройства. Убедитесь, что все, что связано с выводом Vpp может выдержать это напряжение, или изолировать его с соответствующим резистор или диод Schotkey.
2. Изолировать ICSP_Clock и ICSP_Data от остальной части схемы. Изоляция методом является применение конкретного, к сожалению, означает, что нет готовых рецептов. Часто, резистивный изоляции работает отлично. Рекомендуемые значения резистор 1k до 10k.
3. Физически найти ICSP заголовок как можно ближе к запрограммировано чипа, уменьшить затухание.
Общие Microchip PIC ICSP макетов
Дополнительная литература и ссылки
Подпишитесь сейчас через RSS и никогда не пропустите сообщение!
Схемы на пик контроллере. Схемы и устройства на микроконтроллерах
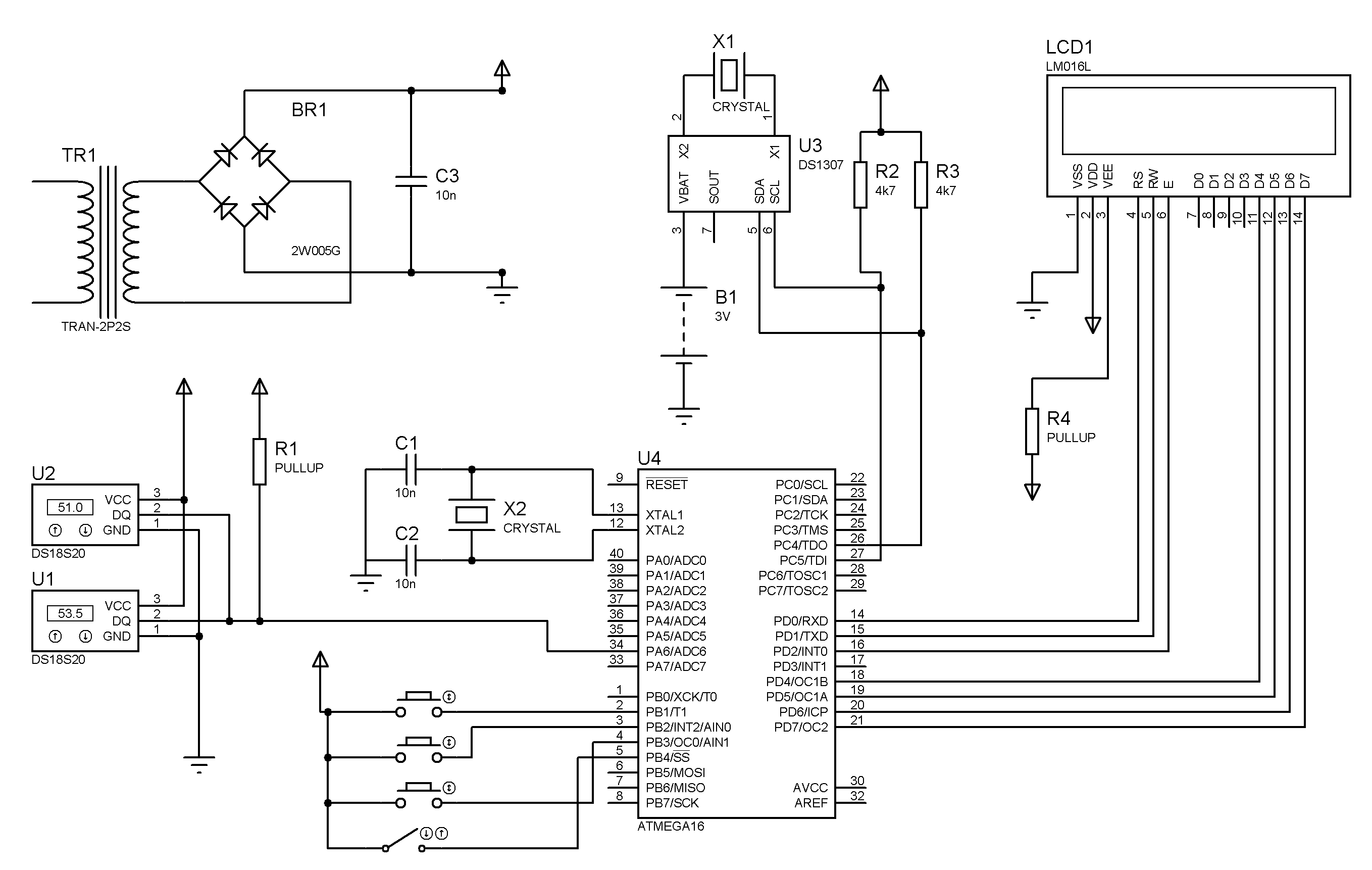
В данной статье предлагается схема цифрового термометра на микроконтроллере AVR ATtiny2313, датчике температуры DS1820 (или DS18b20), подключенному к микроконтроллеру по протоколу 1-wire, и ЖК-дисплее 16×2 на контроллере HD44780. Описываемое устройство может найти широкое применение среди радиолюбителей.
Программа для микроконтроллера написана на ассемблере в среде AVR Studio. Монтаж выполнен на макетной плате, кварцевый резонатор на 4МГц, микроконтроллер ATtiny2313 можно заменить на AT90S2313, предварительно перекомпилировав исходный код программы. Погрешность датчика DS1820 около 0,5 С. В архиве также находится прошивка для случая если используется датчик DS18B20. Опрос датчика производится каждую секунду.
WAV-плеер собран на микроконтроллере AVR ATtiny85 (можно использовать ATtiny25/45/85 серии). У микроконтроллеров этой серии всего восемь ножек и два ШИМ (Fast PWM) с несущей 250kHz. Для управления картой памяти достаточно всего 6 проводов: два для питания и четыре сигнальные. Восемь ножек микроконтроллера вполне достаточно для работой с картой памяти, вывода звука и кнопки управления. В любом случае данный плеер очень прост.
С помощью данного измерителя ёмкости можно легко измерить любую ёмкость от единиц пФ до сотен мкФ. Существует несколько методов измерения емкости. В данном проекте используется интеграционный метод.
Главное преимущество использования этого метода в том, что измерение основано на измерении времени, что может быть выполнено на МК довольно точно. Этот метод очень подходит для самодельного измерителя ёмкости, к тому же он легко реализуем на микроконтроллере.
Данный проект был сделан по просьбе друга для установки на дверь в складское помещение. В дальнейшем было изготовлено ещё несколько по просьбе друзей и знакомых. Конструкция оказалась простой и надёжной. Работает данное устройство так: пропускает только те RFID-карты, которые были заранее занесены в память устройства.
Эта декоративная звезда состоит из 50 специальных светодиодов RGB, которые контролируются ATtiny44A . Все светодиоды непрерывно изменяют цвет и яркость в случайном порядке. Также есть несколько разновидностей эффектов, которые также активируются случайно. Три потенциометра могут изменять интенсивность основных цветов. Положение потенциометра индицируется светодиодами при нажатии кнопки, а изменение цвета и скорость эффекта можно переключать в три этапа. Этот проект был полностью построен на компонентах SMD из-за специальной формы печатной платы. Несмотря на простую схему, структура платы довольно сложная и вряд ли подойдет для новичков.
В этой статье описывается универсальный трехфазный преобразователь частоты на микроконтроллере(МК) ATmega 88/168/328P . ATmega берет на себя полный контроль над элементами управления, ЖК-дисплеем и генерацией трех фаз. Предполагалось, что проект будет работать на готовых платах, таких как Arduino 2009 или Uno, но это не было реализовано. В отличие от других решений, синусоида не вычисляется здесь, а выводится из таблицы. Это экономит ресурсы, объем памяти и позволяет МК обрабатывать и отслеживать все элементы управления. Расчеты с плавающей точкой в программе не производятся.
Частота и амплитуда выходных сигналов настраиваются с помощью 3 кнопок и могут быть сохранены в EEPROM памяти МК. Аналогичным образом обеспечивается внешнее управление через 2 аналоговых входа. Направление вращения двигателя определяется перемычкой или переключателем.
Регулируемая характеристика V/f позволяет адаптироваться ко многим моторам и другим потребителям. Также был задействован интегрированный ПИД-регулятор для аналоговых входов, параметры ПИД-регулятора могут быть сохранены в EEPROM. Время паузы между переключениями ключей (Dead-Time) можно изменить и сохранить.
Этот частотомер с AVR микроконтроллером позволяет измерять частоту от 0,45 Гц до 10 МГц и период от 0,1 до 2,2 мкс в 7-ми автоматически выбранных диапазонах. Данные отображаются на семиразрядном светодиодном дисплее. В основе проекта микроконтроллер Atmel AVR ATmega88/88A/88P/88PA, программу для загрузки вы можете найти ниже. Настройка битов конфигурации приведена на рисунке 2 .
Принцип измерения отличается от предыдущих двух частотомеров. Простой способ подсчета импульсов через 1 секунду, используемый в двух предыдущих частотомерах(частотомер I, частотомер II), не позволяет измерять доли Герц. Вот почему я выбрал другой принцип измерения для своего нового частотомера III. Этот метод намного сложнее, но позволяет измерять частоту с разрешением до 0,000 001 Гц.
Это очень простой частотомер на микроконтроллере AVR. Он позволяет измерять частоты до 10 МГц в 2-х автоматически выбранных диапазонах. Он основан на предыдущем проекте частотомера I , но имеет 6 разрядов индикатора вместо 4-х. Нижний диапазон измерения имеет разрешение 1 Гц и работает до 1 МГц. Более высокий диапазон имеет разрешение 10 Гц и работает до 10 МГц. Для отображения измеренной частоты используется 6-разрядный светодиодный дисплей. Прибор построен на основе микроконтроллера Atmel AVR ATtiny2313A или ATTiny2313
Микроконтроллер тактируется от кварцевого резонатора частотой 20 МГц (максимально допустимая тактовая частота). Точность измерения определяется точностью этого кристалла, а также конденсаторов C1 и C2. Минимальная длина полупериода измеряемого сигнала должна быть больше периода частоты кварцевого генератора (ограничение архитектуры AVR). Таким образом, при 50% рабочем цикле можно измерять частоты до 10 МГц.
Это, вероятно, самый простой частотомер на микроконтроллере AVR. Он позволяет измерять частоты до 10 МГц в 4-х автоматически выбранных диапазонах. Самый низкий диапазон имеет разрешение 1 Гц. Для отображения измеренной частоты используется 4-разрядный светодиодный дисплей. Прибор построен на основе микроконтроллера Atmel AVR ATtiny2313A или ATtiny2313 . Настройку битов конфигурации вы можете найти ниже.
Микроконтроллер тактируется от кварцевого резонатора частотой 20 МГц (максимально допустимая тактовая частота). Точность измерения определяется точностью этого кристалла. Минимальная длина полупериода измеряемого сигнала должна быть больше периода частоты кварцевого генератора (ограничение архитектуры MCU). Таким образом, при 50% рабочем цикле можно измерять частоты до 10 МГц.
Вариант 1: ATmega8 + Nokia 5110 LCD + питание 3V
В схеме используются Atmega8-8PU (внешний кварц частотой 8MHz), Nokia 5110 LCD и транзистор для обработки импульсов от геркона. Регулятор напряжения на 3,3V обеспечивает питание для всей цепи.
Все компоненты были смонтированы на макетной плате, включая разъемы для: ISP – программатора (USBAsp), 5110 Nokia LCD, питания (5V, подаваемого на 3.3V – регулятор), геркона, кнопки сброса и 2-контактный разъем, используемый для считывания полярности обмотки двигателя привода станка, чтобы знать, увеличивать или уменьшать счетчик.
Дозатор предназначен для автоматической подачи в аквариум жидких удобрений. Подача удобрений может осуществляться по четырем независимым каналам. Каждый канал может осуществлять подачу удобрений один раз в сутки с выбором любых дней недели. Объем подаваемых удобрений настраивается для каждого канала в отдельности.
Исполнительным устройством дозатора являются насосы-помпы вибрационного типа линейки ULKA. В связи с возможностью использования разных моделей данных насосов в устройстве предусмотрена калибровка производительности каждого канала и регулировка подводимой мощности методом ШИМ. В моем устройстве применены насосы широко распространенной модели ULKA EX5 230V 48W .
В данном радиоприемнике используется готовый модуль на чипе TEA5767 . Информация отображается на красивом OLED-дисплеем (SSD1306 ), разрешением 128×64 пикселя. Модулем приемника и дисплеем управляет микроконтроллер ATmega8 , тактируется от внутреннего генератора частотой 8MHz. Печатная плата приемника (наряду с батареей от телефона Samsung L760) была спроектирована так, чтобы она могла вписаться в спичечную коробку. Имеются 4 клавиши управления + клавиша сброса. В настоящее время радио не имеет аудиоусилителя (планируется установка соответствующего усилительного модуля).
Поделки с микроконтроллерами – вопрос, как никогда актуальный и интересный. Ведь мы живем в 21 веке, эпохе новых технологий, роботов и машин. На сегодняшний день каждый второй, начиная с малого возраста, умеет пользоваться интернетом и различного рода гаджетами, без которых порою и вовсе сложно обойтись в повседневной жизни.
Поэтому в этой статье мы будем затрагивать, в частности, вопросы пользования микроконтроллерами, а также непосредственного применения их с целью облегчения миссий, каждодневно возникающих перед всеми нами. Давайте разберемся, в чем ценность этого прибора, и как просто использовать его на практике.
Микроконтроллер − это чип, целью которого является управление электрическими приборами. Классический контроллер совмещает в одном кристалле, как работу процессора, так и удаленных приборов, и включает в себя оперативное запоминающее устройство. В целом, это монокристальный персональный компьютер, который может осуществлять сравнительно обыкновенные задания.
Разница между микропроцессором и микроконтроллером заключается в наличии встроенных в микросхему процессора приборов «пуск-завершение», таймеров и иных удаленных конструкций. Применение в нынешнем контроллере довольно сильного вычисляющего аппарата с обширными способностями, выстроенного на моносхеме, взамен единого комплекта, существенно уменьшает масштабы, потребление и цену созданных на его основе приборов.
Из этого следует, что применить такое устройство можно в технике для вычисления, такой, как калькулятор, материнка, контроллеры компакт-дисков. Используют их также в электробытовых аппаратах – это и микроволновки, и стиральные машины, и множество других. Также микроконроллеры широко применяются в индустриальной механике, начиная от микрореле и заканчивая методиками регулирования станков.
Микроконроллеры AVR
Ознакомимся с более распространенным и основательно устоявшимся в современном мире техники контроллером, таким как AVR. В его состав входят высокоскоростной RISC-микропроцессор, 2 вида затратной по энергии памяти (Flash-кэш проектов и кэш сведений EEPROM), эксплуатационная кэш по типу RAM, порты ввода/вывода и разнообразные удаленные сопряженные структуры.
- рабочая температура составляет от -55 до +125 градусов Цельсия;
- температура хранения составляет от -60 до +150 градусов;
- наибольшая напряженность на выводе RESET, в соответствии GND: максимально 13 В;
- максимальное напряжение питания: 6.0 В;
- наибольший электроток линии ввода/вывода: 40 мА;
- максимальный ток по линии питания VCC и GND: 200 мА.
Возможности микроконтроллера AVR
Абсолютно все без исключения микроконтроллеры рода Mega обладают свойством самостоятельного кодирования, способностью менять составляющие своей памяти драйвера без посторонней помощи. Данная отличительная черта дает возможность формировать с их помощью весьма пластичные концепции, и их метод деятельности меняется лично микроконтроллером в связи с той либо иной картиной, обусловленной мероприятиями извне или изнутри.
Обещанное количество оборотов переписи кэша у микроконтроллеров AVR второго поколения равен 11 тысячам оборотов, когда стандартное количество оборотов равно 100 тысячам.
Конфигурация черт строения вводных и выводных портов у AVR заключается в следующем: целью физиологического выхода имеется три бита регулирования, а никак не два, как у известных разрядных контроллеров (Intel, Microchip, Motorola и т. д.). Это свойство позволяет исключить потребность обладать дубликатом компонентов порта в памяти с целью защиты, а также ускоряет энергоэффективность микроконтроллера в комплексе с наружными приборами, а именно, при сопутствующих электрических неполадках снаружи.
Всем микроконтроллерам AVR свойственна многоярусная техника пресечения. Она как бы обрывает стандартное течение русификатора для достижения цели, находящейся в приоритете и обусловленной определенными событиями. Существует подпрограмма преобразования запрашивания на приостановление для определенного случая, и расположена она в памяти проекта.
Когда возникает проблема, запускающая остановку, микроконтроллер производит сохранение составных счетчика регулировок, останавливает осуществление генеральным процессором данной программы и приступает к совершению подпрограммы обрабатывания остановки. По окончании совершения, под шефствующей программы приостановления, происходит возобновление заранее сохраненного счетчика команд, и процессор продолжает совершать незаконченный проект.
Поделки на базе микроконтроллера AVR
Поделки своими руками на микроконтроллерах AVR становятся популярнее за счет своей простоты и низких энергетических затрат. Что они собой представляют и как, пользуясь своими руками и умом, сделать такие, смотрим ниже.
“Направлятор”
Такое приспособление проектировалось, как небольшой ассистент в качестве помощника тем, кто предпочитает гулять по лесу, а также натуралистам. Несмотря на то, что у большинства телефонных аппаратов есть навигатор, для их работы необходимо интернет-подключение, а в местах, оторванных от города, это проблема, и проблема с подзарядкой в лесу также не решена. В таком случае иметь при себе такое устройство будет вполне целесообразно. Сущность аппарата состоит в том, что он определяет, в какую сторону следует идти, и дистанцию до нужного местоположения.
Построение схемы осуществляется на основе микроконтроллера AVR с тактированием от наружного кварцевого резонатора на 11,0598 МГц. За работу с GPS отвечает NEO-6M от U-blox. Это, хоть и устаревший, но широко известный и бюджетный модуль с довольно четкой способностью к установлению местонахождения. Сведения фокусируются на экране от Nokia 5670. Также в модели присутствуют измеритель магнитных волн HMC5883L и акселерометр ADXL335.
Беспроводная система оповещения с датчиком движения
Полезное устройство, включающее в себя прибор перемещения и способность отдавать, согласно радиоканалу, знак о его срабатывании. Конструкция является подвижной и заряжается с помощью аккумулятора или батареек. Для его изготовления необходимо иметь несколько радиомодулей HC-12, а также датчик движения hc-SR501.
Прибор перемещения HC-SR501 функционирует при напряжении питания от 4,5 до 20 вольт. И для оптимальной работы от LI-Ion аккумулятора следует обогнуть предохранительный светодиод на входе питания и сомкнуть доступ и вывод линейного стабилизатора 7133 (2-я и 3-я ножки). По окончанию проведения этих процедур прибор приступает к постоянной работе при напряжении от 3 до 6 вольт.
Внимание: при работе в комплексе с радиомодулем HC-12 датчик временами ложно срабатывал. Во избежание этого необходимо снизить мощность передатчика в 2 раза (команда AT+P4). Датчик работает на масле, и одного заряженного аккумулятора, емкостью 700мА/ч, хватит свыше, чем на год.
Минитерминал
Приспособление проявило себя замечательным ассистентом. Плата с микроконтроллером AVR нужна, как фундамент для изготовления аппарата. Из-за того, что экран объединён с контроллером непосредственно, то питание должно быть не более 3,3 вольт, так как при более высоких числах могут возникнуть неполадки в устройстве.
Вам следует взять модуль преобразователя на LM2577, а основой может стать Li-Ion батарея емкостью 2500мА/ч. Выйдет дельная комплектация, отдающая постоянно 3,3 вольта во всём трудовом интервале напряжений. С целью зарядки применяйте модуль на микросхеме TP4056, который считается бюджетным и достаточно качественным. Для того чтобы иметь возможность подсоединить минитерминал к 5-ти вольтовым механизмам без опаски сжечь экран, необходимо использовать порты UART.
Основные аспекты программирования микроконтроллера AVR
Кодирование микроконтоллеров зачастую производят в стиле ассемблера или СИ, однако, можно пользоваться и другими языками Форта или Бейсика. Таким образом, чтобы по факту начать исследование по программированию контроллера, следует быть оснащенным следующим материальным набором, включающим в себя: микроконтроллер, в количестве три штуки – к высоковостребованным и эффективным относят – ATmega8A-PU, ATtiny2313A-PU и ATtiny13A- PU.
Чтобы провести программу в микроконтроллер, нужен программатор: лучшим считают программатор USBASP, который дает напряжение в 5 Вольт, используемое в будущем. С целью зрительной оценки и заключений итогов деятельности проекта нужны ресурсы отражения данных − это светодиоды, светодиодный индуктор и экран.
Чтобы исследовать процедуры коммуникации микроконтроллера с иными приборами, нужно числовое приспособление температуры DS18B20 и, показывающие правильное время, часы DS1307. Также важно иметь транзисторы, резисторы, кварцевые резонаторы, конденсаторы, кнопки.
С целью установки систем потребуется образцовая плата для монтажа. Чтобы соорудить конструкцию на микроконтроллере, следует воспользоваться макетной платой для сборки без пайки и комплектом перемычек к ней: образцовая плата МВ102 и соединительные перемычки к макетной плате нескольких видов – эластичные и жесткие, а также П-образной формы. Кодируют микроконтроллеры, применяя программатор USBASP.
Простейшее устройство на базе микроконтроллера AVR. Пример
Итак, ознакомившись с тем, что собой представляют микроконтроллеры AVR, и с системой их программирования, рассмотрим простейшее устройство, базисом для которого служит данный контроллер. Приведем такой пример, как драйвер низковольтных электродвигателей. Это приспособление дает возможность в одно и то же время распоряжаться двумя слабыми электрическими двигателями непрерывного тока.
Предельно возможный электроток, коим возможно загрузить программу, равен 2 А на канал, а наибольшая мощность моторов составляет 20 Вт. На плате заметна пара двухклеммных колодок с целью подсоединения электромоторов и трехклеммная колодка для подачи усиленного напряжения.
Устройство выглядит, как печатная плата размером 43 х 43 мм, а на ней сооружена минисхемка радиатора, высота которого 24 миллиметра, а масса – 25 грамм. С целью манипулирования нагрузкой, плата драйвера содержит около шести входов.
Заключение
В заключение можно сказать, что микроконтроллер AVR является полезным и ценным средством, особенно, если дело касается любителей мастерить. И, правильно использовав их, придерживаясь правил и рекомендаций по программированию, можно с легкостью обзавестись полезной вещью не только в быту, но и в профессиональной деятельности и просто в повседневной жизни.
Принцип закрывания дверцы клетки весьма прост. Дверка клетки подпирается специальным упором, сделанным из медной проволоки. К упору крепится капроновая нить нужной длины. Если потянуть за нить, то упор соскальзывает, и дверка клетки под собственным весом закрывается. Но это в ручном режиме, а я хотел реализовать автоматический процесс без участия кого-либо.
Для управления механизмом закрывания дверцы клетки был применен сервопривод. Но в процессе работы он создавал шум. Шум мог спугнуть птицу. Поэтому сервопривод я заменил на коллекторный двигатель, взятый из радиоуправляемой машинки. Он работал тихо и идеально подходил, тем более что управлять коллекторным двигателем не составляло сложностей.
Для определения, находится ли уже птица в клетке, я использовал недорогой датчик движения. Сам датчик движения уже является законченным девайсом, и паять ничего не нужно. Но у данного датчика угол срабатывания весьма большой, а мне нужно, чтобы он реагировал только во внутренней области клетки. Для ограничения угла срабатывания я поместил датчик в цоколь, когда-то служившей эконом-лампы. Из картона вырезал своего рода заглушку с отверстием посередине для датчика. Пошаманив с расстоянием данной заглушки относительно датчика, настроил оптимальный угол для срабатывания датчика.
В качестве зазывалы для птиц я решил применить звуковой модуль WTV020M01 с записанным на микроSD карте памяти пением чижа и щегла. Именно их я и собирался ловить. Поскольку я использовал один звуковой файл, то и управлять звуковым модулем я решил простим способом, без использования протокола обмена между звуковым модулем и микроконтроллером.
При подаче на девятую ножку звукового модуля низкого сигнала, модуль начинал воспроизводить. Как только звук воспроизводился на пятнадцатой ноге звукового модуля, устанавливается низкий уровень. Благодаря этому микроконтроллер отслеживал воспроизведение звука.
Поскольку я реализовал паузу между циклами воспроизведения звука, то для остановки воспроизведения звука программа подает низкий уровень на первую ножку звукового модуля (reset). Звуковой модуль является законченным устройством со своим усилителем для звука, и, по большому счету, в дополнительном усилителе звука он не нуждается. Но мне данного усиления звука показалось мало, и в качестве усилителя звука я применил микросхему TDA2822M. В режиме воспроизведения звука потребляет 120 миллиампер. Учитывая, что поимка птицы займет какое-то время, в качестве автономной батареи питания я применил не совсем новый аккумулятор от бесперебойника (всё равно валялся без дела).
Принцип электронного птицелова прост, и схема состоит в основном из готовых модулей.
Программа и схема –
Схемы на микроконтроллере, статьи и описания с прошивками и фотографиями для автомобиля.
Простой тахометр на микроконтроллере ATmega8
Тахометр применяется в автомобилях для измерения частоты вращения всяких деталей которые способны вращаться. Есть много вариантов таких устройств, я предложу вариант на AVR микроконтроллере ATmega8. Для моего варианта, вам также…
Читать полностьюЦветомузыка на микроконтроллере Attiny45 в авто
Эта цветомузыка, имея малый размер и питание 12В, как вариант может использоваться в авто при каких-либо мероприятиях. Первоисточник этой схемы Радио №5, 2013г А. ЛАПТЕВ, г. Зыряновск, Казахстан. Схема…
Читать полностьюКонтроллер обогрева зеркал и заднего стекла
Позволяет управлять одной кнопкой раздельно обогревом заднего стекла и зеркал, плюс настраиваемый таймер отключения до полутора часов для каждого канала. Схема построена на микроконтроллере ATtiny13A. Описание работы:
Читать полностьюДиммер для плафона автомобиля
Почти во всех автомобилях есть управление салонным светом, которое осуществляется с помощью бортового компьютера или отдельной бортовой системой. Свет включается плавно, и гаснет также с некой задержкой (для…
Читать полностьюGSM сигнализация с оповещением на мобильник
Представляю очень популярную схему автомобильной сигнализации на базе микроконтроллера ATmega8. Такая сигнализация дает оповещение на мобильник админа в виде звонков или смс. Устройства интегрируется с мобильником с помощью…
Читать полностьюМоргающий стопак на микроконтроллере
Сделал новую версию моргающего стопака. Отличается алгоритм работы и схема управления, размер и подключение такое же. Возможно регулировать частоту моргания, длительность до перехода в постоянное свечение и скважность…
Читать полностьюДХО плюс стробоскопы
Эта поделка позволяет стробоскопить светодиодными ДХО. Поделка имеет малый размер, управление всего одной кнопкой, широкие возможности настройки. Размер платы 30 на 19 миллиметров. С обратной стороны расположен клемник…
Читать полностьюДелаем и подключаем доводчик к сигнализации
Количества автомобилей с автоматическим стеклоподъемниками постоянно растет, и даже если в машине нет такого, многие делают его своими руками. Моей целю было собрать такое устройства и подключить его к…
Читать полностьюСветодиоды включаются от скорости
Получился «побочный продукт»: нужно было оттестить режим работы датчика скорости для проекта отображения передач на матрице 5х7, для этого собрал небольшую схемку. Схемка умеет включать светодиоды в зависимости…
Читать полностьюЦифровой тахометр на AVR микроконтроллере (ATtiny2313)
Тахометр измеряет частоту вращения деталей, механизмов и других агрегатах автомобиля. Тахометр состоит из 2-х основных частей — из датчика, который измеряет скорость вращения и из дисплея, где будет…
Читать полностьюПростой цифровой спидометр на микроконтроллере ATmega8
Спидометр это измерительное устройства, для определения скорости автомобиля. По способу измерения, есть несколько видов спидометра центробежные, хронометрические, вибрационные, индукционные, электромагнитные, электронные и напоследок спидометры по системе GPS.
Читать полностьюПлавный розжиг приборки на микроконтроллере
Эта версия немного отличается схемой: добавлена вторая кнопка настройки и убран потенциометр скорости розжига. Возможности: Два отдельных независимых канала. Для каждого канала три группы настраиваемых параметра: время задержки до начала…
|
Новостная лента
На сайте представлены примеры программирования, которые будут полезны как для опытного разработчика схем на микроконтроллерах, так и для новичка. Особо рассматривается программирование микроконтроллеров для начинающих пользователей. Программные примеры программирования разбиты на различные разделы. Основную массу составляют примеры программирования микроконтроллеров avr и микроконтроллеров microchip. Пользователю предлагается познакомиться с различными примерами программирования и различными средами программирования: MicroLab, AVRStudio, MikroC, FloweCode. Представлены схемы на микроконтроллерах ведущих производителей: PIC и AVR. Рассматривается огромное количество схем для начинающих разработчиков. Если Вы начинающий радиолюбитель, то для Вас мы приготовили раздел микроконтроллеры для начинающих. Современные микроконтроллеры относятся к классу микропроцессорных устройств. В основе принципа действия таких элементов лежит исполнение последовательного потока команд, называемого программой. Микроконтроллер получает программные команды в виде отдельных машинных кодов. Известно, что для создания и отладки программ, машинные коды подходят плохо, так как трудно воспринимаются человеком. Этот факт привел к появлению различных языков программирования и огромного количества различных компиляторов. В основе языков программирования микроконтроллеров лежат классические языки для компьютеров. Единственным отличием становится ориентированность на работу со встроенными периферийными устройствами. Архитектура микроконтроллеров требует, например, наличия битово-ориентированных команд. Последние выполняют работу с отдельными линиями портов ввода/вывода или флагами регистров. Подобные команды отсутствуют в большинстве крупных архитектур. Например, ядро ARM, активно применяемое в микроконтроллерах, не содержит битовых команд, вследствие чего разработчикам пришлось создавать специальные методы битового доступа.
Примеры программирования микроконтроллеров будут представлены на хорошо всем известном языке Си. А перед тем как постигать азы программирования микроконтроллеров и схемотехнику устройств на микроконтроллерах, авторам предлагается ещё раз вспомнить основы микропроцессорной техники, основы электроники, полупроводниковую электронику, аналоговую и цифровую схемотехнику, а так же азы аналогового и цифрового представления сигнала. Для тех, кому хочется получить новые знания в области современного программирования, можно будет познакомиться с графическим языком программирования LabView. Выбор языка программирования зависит от множества факторов. В первую очередь, типо решаемых задач и необходимым качеством кода. Если Вы ведёте разработку малых по объёму и несложных программ, то можно использовать практически любой язык. Для компактного кода подойдет Ассемблер, а если ставятся серьезные задачи, то альтернативы С/С++ практически нет. Также необходимо учитывать доступность компилятора. В итоге самым универсальным решением можно назвать связку Ассемблера и C/C++. Для простого освоения языков, можно воспользоваться примерами программ для микроконтроллера. Использование примеров программирования упростит и ускорит процесс освоения программирования микроконтроллеров. Схемы на микроконтроллерах позволят начинающим разработчикам освоить тонкости проектирования, моделирования и программирования микроконтроллеров. |
|||
Микроконтроллеры AVR для начинающих – 1 « схемопедия
Микроконтроллеры (далее МК) прочно вошли в нашу жизнь, на просторах интернета можно встретить очень много интересных схем, которые исполнены на МК. Чего только нельзя собрать на МК: различные индикаторы, вольтметры, приборы для дома (устройства защиты, коммутации, термометры…), металлоискатели, разные игрушки, роботы и т.д. перечислять можно очень долго. Первую схему на микроконтроллере я увидел лет 5-6 назад в журнале радио, и практически сразу же перелистнул страницу, подумав про себя “все равно не смогу собрать”. Действительно, в то время МК для меня были чем то очень сложным и непонятым устройством, я не представлял как они работают, как их прошивать, и что делать с ними в случае неправильной прошивки. Но около года назад, я впервые собрал свою первую схему на МК, это была схема цифрового вольтметра на 7 сегментных индикаторах, и микроконтроллере ATmega8. Так получилось, что микроконтроллер я купил случайно, когда стоял в отделе радиодеталей, парень передо мной покупал МК, и я тоже решил купить, и попробовать собрать что-нибудь. В своих статьях я расскажу вам про микроконтроллеры AVR фирмы ATMEL, научу вас работать с ними, рассмотрим программы для прошивки, изготовим простой и надежный программатор, рассмотрим процесс прошивки и самое главное проблемы, которые могут возникнуть и не только у новичков.
Основные параметры некоторых микроконтроллеров семейства AVR:
| Микроконтроллер | Память FLASH | Память ОЗУ | Память EEPROM | Порты ввода/вывода | U питания | Частота |
| ATmega48 | 4 | 512 | 256 | 23 | 2,7-5,5 | 0-10-20 |
| ATmega48V | 4 | 512 | 256 | 23 | 1,8-4,8-5,5 | 0-4-10 |
| ATmega8515 | 8 | 512 | 512 | 35 | 4,5-5,5 | 0-16 |
| ATmega8515L | 8 | 512 | 512 | 35 | 2,7-5,5 | 0-8 |
| ATmega8535 | 8 | 512 | 512 | 32 | 4,5-5,5 | 0-16 |
| ATmega8535L | 8 | 512 | 512 | 32 | 2,7-5,5 | 0-8 |
| ATmega8 | 8 | 1K | 512 | 23 | 4,5-5,5 | 0-16 |
| ATmega8L | 8 | 1K | 512 | 23 | 2,7-5,5 | 0-8 |
| ATmega88 | 8 | 1K | 512 | 23 | 2,7-5,5 | 0-10-20 |
| ATmega88V | 8 | 1K | 512 | 23 | 4,5-5,5 | 0-4-10 |
| ATmega16 | 16 | 1K | 512 | 32 | 4,5-5,5 | 0-16 |
| ATmega16L | 16 | 1K | 512 | 32 | 2,7-5,5 | 0-8 |
| ATmega32 | 32 | 2K | 1K | 32 | 4,0-5,5 | 0-16 |
| ATmega32L | 32 | 2K | 1K | 32 | 2,7-5,5 | 0-8 |
Дополнительные параметры МК AVR mega:
Рабочая температура: -55…+125*С
Температура хранения: -65…+150*С
Напряжение на выводе RESET относительно GND: max 13В
Максимальное напряжение питания: 6.0В
Максимальный ток линии ввода/вывода: 40мА
Максимальный ток по линии питания VCC и GND: 200мА
Расположение выводов моделей ATmega 8X
Расположение выводов моделей ATmega48x, 88x, 168x
Расположение выводов у моделей ATmega8515x
Расположение выводов у моделей ATmega8535x
Расположение выводов у моделей ATmega16, 32x
Расположение выводов у моделей ATtiny2313
В конце статьи прикреплён архив с даташитами на некоторые микроконтроллеры
Установочные FUSE биты MK AVR
| BODEN | BODLEVEL | BOOTRST | BOOTSZ0 | BOOTSZ1 | CKSEL0 | CKSEL1 | SPIEN |
| CKSEL2 | CKSEL3 | EESAVE | FSTRT | INCAP | RCEN | RSTDISBL | SUT0 |
| SUT1 |
Запомните, запрограммированный фьюз – это 0, не запрограммированный – 1. Осторожно стоит относиться к выставлению фьюзов, ошибочно запрограммированный фьюз может заблокировать микроконтроллер. Если вы не уверены какой именно фьюз нужно запрограммировать, лучше на первый раз прошейте МК без фьюзов.
Самыми популярными микроконтроллерами у радиолюбителей являются ATmega8, затем идут ATmega48, 16, 32, ATtiny2313 и другие. Микроконтроллеры продаются в TQFP корпусах и DIP, новичкам рекомендую покупать в DIP. Если купите TQFP, будет проблематичнее их прошить, придется купить или изготовить переходник и паять плату т.к. у них ножки располагаются очень близко друг от друга. Советую микроконтроллеры в DIP корпусах, ставить на специальные панельки, это удобно и практично, не придется выпаивать МК если приспичит перепрошить, или использовать его для другой конструкции.
Почти все современные МК имеют возможность внутрисхемного программирования ISP, т.е. если ваш микроконтроллер запаян на плату, то для того чтобы сменить прошивку нам не придется выпаивать его с платы.
Для программирования используется 6 выводов:
RESET – Вход МК
VCC – Плюс питания, 3-5В, зависит от МК
GND – Общий провод, минус питания.
MOSI – Вход МК (информационный сигнал в МК)
MISO – Выход МК (информационный сигнал из МК)
SCK – Вход МК (тактовый сигнал в МК)
Иногда еще используют вывода XTAL 1 и XTAL2, на эти вывода цепляется кварц, если МК будет работать от внешнего генератора, в ATmega 64 и 128 вывода MOSI и MISO не применяются для ISP программирования, вместо них вывода MOSI подключают к ножке PE0, a MISO к PE1. При соединении микроконтроллера с программатором, соединяющие провода должны быть как можно короче, а кабель идущий от программатора на порт LPT так-же не должен быть слишком длинным.
В маркировке микроконтроллера могут присутствовать непонятные буквы с цифрами, например Atmega 8L 16PU, 8 16AU, 8A PU и пр. Буква L означает, что МК работает от более низкого напряжения, чем МК без буквы L, обычно это 2.7В. Цифры после дефиса или пробела 16PU или 8AU говорят о внутренней частоте генератора, который есть в МК. Если фьюзы выставлены на работу от внешнего кварца, кварц должен быть установлен на частоту, не превышающей максимальную по даташиту, это 20МГц для ATmega48/88/168, и 16МГц для остальных атмег.
Первые цифры в названии микроконтроллера обозначают объем FLASH ПЗУ в килобайтах, например ATtiny15 – 1 Кб, ATtiny26 – 2 Кб, AT90S4414 – 4 Кб, Atmega8535 – 8 Кб, ATmega162 – 16Кб, ATmega32 – 32 Кб, ATmega6450 – 64Кб, Atmega128 – 128Кб.
Иногда встречаются схемы, где применены микроконтроллеры с названиями типа AT90S… это старые модели микроконтроллеров, некоторые из них можно заменить на современные, например:
AT90S4433 – ATmega8
AT90S8515 – ATmega8515
AT90S8535 – ATmega8535
AT90S2313 – ATtiny2313
ATmega163 – ATmega16
ATmega161 – ATmega162
ATmega323 – ATmega32
ATmega103 – ATmega64/128
ATmega 8 имеет несколько выводов питания, цифровое – VCC, GND и аналоговое – AVCC, GND. В стандартном включении обе пары выводов соединяют параллельно, т.е. вместе. Микроконтроллеры AVR не любят повышенного напряжения, если питание выше 6 вольт, то они могут выйти из строя. Я обычно применяю маломощный стабилизатор напряжения на 5 вольт, КР142ЕН5 или 78L05. Если напряжение питания слишком низкое, то МК не прошьется, программа будет ругаться и выдавать ошибки (к примеру -24 в PonyProg).
На этом закончим, пока можете выбрать в интернете понравившуюся схему и изучить ее, можете заодно сходить и купить нужный микроконтроллер. В следующих частях статьи мы будем собирать простой и надежный программатор, познакомимся с программами для прошивания и попробуем прошить МК.
Даташит ATmega8
Даташит ATmega16
Даташит ATmega32
Даташит ATmega48/88/168
Даташит ATmega128
Даташит ATmega8515
Даташит ATmega8535
Даташит ATtiny2313
Автор: Романов А.С (г. Чебоксары)
| [Chip PIC16F84_ICP] | Секция чипа c уникальным названием чипа |
| Level1=MicroChip | Название пункта меню верхнего уровня |
| Level2=PIC | Название пункта меню 2-го уровня вложения |
| ItemCaption=PIC16F84 | Название конечного пункта меню |
| InitClass=TfrmMICROCHIP_PIC_ICP | Название класса окна-фрейма программирующего данное семейство чипов по определенному протоколу Названия классов предопределены в программе: TfrmMICROCHIP_PIC_ICP и TfrmATMEL_AVR_ICP |
| Здесь идет определение программируемых областей, в пунктах Content разные параметры отделяются символом “|” | |
| Area_1_Content= Code | 0..3FFh (1KW) | Название и описание области программирования |
| Area_1_data=CODE, 0, $3FF, 14 | Данные связанные с областью программирования – уникальный идентификатор, начальный адрес, конечный адрес, размер слова данных в битах |
| Area_2_Content=EEPROM | 0..3Fh (64B) Area_2_Data=EEPROM,0,$3F,8 Area_3_Content=Configuration word | CP, PWRTE, WDTE, FOSC Area_3_Data=CONFIG,$2007,$2007,14 Area_4_Content=ID Locations | 2000H-2003H Area_4_Data=ID,$2000,$2003,8 |
и т. д. для других областей |
| Здесь идет определение установок для некоторых областей программирования определенных выше | |
| Param_1_Content=CP | CP | CONFIG | Определение установки с названием CP, с уникальным идентификатором CP из области CONFIG. По умолчанию установка принимает значение с номером 1 в суффиксе идентификатора |
| Описание возможных значений установки | |
| Param_1_Choice1=1 – Code protection OFF | Название 1-го значения установки CP |
| Param_1_Choice1_icon=4 | Номер во внутреннем списке отображаемой иконы для 1-го значения |
| Param_1_Choice1_data=1111111111xxxx | маска 1-го значения |
| Param_1_Choice2=0 – Code protection ON Param_1_Choice2_icon=3 Param_1_Choice2_data=0000000000xxxx |
Описание 2-го значения установки |
| Param_2_Content=PWRTE | PWRTE | CONFIG Param_2_Choice1=1 – Power up timer disabled Param_2_Choice1_icon=2 Param_2_Choice1_data=xxxxxxxxxx1xxx Param_2_Choice2=0 – Power up timer enabled Param_2_Choice2_icon=1 Param_2_Choice2_data=xxxxxxxxxx0xxx |
Описание следующей установки и ее значений |
|
Param_3_Content=WDTE | WDTE | CONFIG Param_4_Content=Oscilator | FOSC | CONFIG
|
|
Какой микроконтроллер выбрать для вашего приложения
Когда дело доходит до выбора микроконтроллера, это действительно запутанная задача, поскольку на рынке доступны различные микроконтроллеры с такими же характеристиками. Таким образом, каждый параметр становится важным при выборе микроконтроллера. Здесь мы сравниваем два наиболее часто используемых микроконтроллера – микроконтроллер PIC и микроконтроллер AVR. Здесь они сравниваются на разных уровнях, что будет полезно при выборе микроконтроллера для вашего проекта.
Начать с требований проектаСоберите всю информацию о вашем проекте для начала, прежде чем начинать выбирать какой-либо микроконтроллер. Очень важно собрать как можно больше информации, поскольку это сыграет важную роль при выборе правильного микроконтроллера.
- Соберите информацию о проекте, такую как Размер проекта
- Количество используемых периферийных устройств и датчиков
- Требования к питанию
- Бюджет проекта
- Требования к интерфейсам (например, USB, SPI, I2C, UART и т. Д.),
- Составьте базовую блок-схему оборудования,)
- Перечислите, сколько требуется GPIO.
- Аналогово-цифровые входы (АЦП)
- ШИМ
- Выберите подходящую архитектуру i.е. (8 бит, 16 бит, 32 бит)
- Распознать требования к памяти проекта (RAM, Flash и т. Д.)
Когда вся информация собрана, самое время выбрать микроконтроллер. В этой статье два конкурирующих микроконтроллера PIC и AVR будут сравниваться по множеству параметров. В зависимости от потребности проекта сравнить эти два параметра, обратите внимание на следующие параметры, например,
.- Частота: Скорость, с которой микроконтроллер будет работать
- Количество контактов ввода / вывода: Требуемые порты и контакты
- RAM : Все переменные и массивы объявлены (DATA) в большинстве MCU
- Флэш-память: Независимо от того, какой код вы напишете, он попадает сюда после компиляции
- Расширенные интерфейсы: Расширенные интерфейсы, такие как USB, CAN и Ethernet.
- Рабочее напряжение: Рабочее напряжение MCU, такое как 5 В, 3,3 В или низкое напряжение.
- Целевые разъемы: Разъемы для упрощения схемы и размера.
Большинство параметров одинаковы как для PIC, так и для AVR, но есть некоторые параметры, которые, несомненно, отличаются при сравнении.
Рабочее напряжениеБлагодаря большему количеству продуктов с батарейным питанием, PIC и AVR удалось улучшить работу с низким напряжением. AVR более известны работой с низким напряжением, чем более старая серия PIC , такая как PIC16F и PIC18F, потому что в этих сериях PIC использовался метод стирания микросхемы, для работы которого требуется не менее 4,5 В, а программаторы PIC ниже 4,5 В должны использовать строковые алгоритм стирания, который не может стереть заблокированное устройство. Однако это не относится к AVR.
AVR улучшил и выпустил последние P (пикомощные) варианты, такие как ATmega328P, которые имеют чрезвычайно низкое энергопотребление. Кроме того, текущий ATtiny1634 улучшен и поставляется с режимами сна для снижения энергопотребления при отключении питания, что очень полезно для устройств с батарейным питанием.
Вывод состоит в том, что AVR раньше были ориентированы на низковольтную работу, но теперь PIC была преобразована для работы на низком напряжении и выпустила некоторые продукты, основанные на picPower.
Целевые соединителиЦелевые соединители очень важны при проектировании и разработке. В AVR определены 6- и 10-канальные интерфейсы ISP, что упрощает использование, в то время как у PIC его нет, поэтому программаторы PIC поставляются с подвесными выводами или разъемами RJ11, которые сложно вставить в схему.
Вывод состоит в том, что AVR упростил задачу с точки зрения схемотехники и разработки с целевыми разъемами, тогда как PIC все еще необходимо исправить это.
Расширенные интерфейсыЧто касается расширенных интерфейсов, то PIC, безусловно, является вариантом, поскольку он получил свое действие с расширенными функциями, такими как USB, CAN и Ethernet, чего нет в AVR. Однако можно использовать внешние микросхемы, такие как FTDI USB для последовательных микросхем, контроллеры Microchip Ethernet или микросхемы Philips CAN.
Вывод состоит в том, что PIC наверняка имеет более продвинутые интерфейсы , чем AVR.
Среда разработкиПомимо этого, существуют важные особенности, которые отличают оба микроконтроллера друг от друга. Простота среды разработки очень важна. Ниже приведены некоторые важные параметры, объясняющие простоту среды разработки:
- Разработка IDE
- Компиляторы C
- Сборщики
IDE разработки:
И PIC, и AVR поставляются со своими собственными IDE разработки .Разработка PIC выполняется на MPLAB X , который, как известно, является стабильной и простой IDE по сравнению с AVR Atmel Studio7 , который имеет большой размер 750 МБ и немного неуклюж с дополнительными функциями, что делает его трудным и сложным для начинающие любители электроники.
PIC может быть запрограммирован с помощью микрочиповых инструментов PicKit3 и MPLAB X . AVR программируется с помощью таких инструментов, как JTAGICE и AtmelStudio7. Однако пользователи переходят на более старые версии AVR Studio, такие как 4.18 с пакетом обновления 3, поскольку он работает намного быстрее и имеет базовые функции для разработки.
Вывод таков, что PIC MPLAB X немного быстрее и удобнее, чем AtmelStudio7 .
C Составители:
И PIC, и AVR поставляются с компиляторами XC8 и WINAVR C соответственно. PIC выкупила Hi-tech и выпустила собственный компилятор XC8. Это полностью интегрировано в MPLAB X и хорошо работает. Но WINAVR – это ANSI C, основанный на компиляторе GCC, который упрощает перенос кода и использование стандартных библиотек.Бесплатная ограниченная версия IAR C Compiler объемом 4 Кбайт дает представление о профессиональных компиляторах, которые стоят дорого. Поскольку AVR изначально был разработан для C, вывод кода небольшой и быстрый.
PIC имеет много функций, которые делают его лучше по сравнению с AVR, но его код становится больше из-за структуры PIC. Платная версия доступна с большей оптимизацией, однако бесплатная версия не оптимизирована.
Напрашивается вывод, что WINAVR лучше и быстрее с точки зрения компиляторов, чем PIC XC8.
Сборщики:
Благодаря трем 16-битным регистрам-указателям, которые упрощают адресацию и операции со словами, язык ассемблера AVR очень прост с большим количеством инструкций и возможностью использовать все 32 регистра в качестве аккумулятора. Принимая во внимание, что ассемблер PIC не так хорош со всем, что вынуждено работать через аккумулятор, вынуждает постоянно использовать переключение банка для доступа ко всем регистрам специальных функций. Хотя MPLAB включает макросы для упрощения переключения банков, это утомительно и требует много времени.
Также отсутствие инструкций перехода, просто пропустить и GOTO, что приводит к запутанным структурам и немного запутанному коду. В серии PIC есть несколько серий микроконтроллеров, которые намного быстрее, но опять же ограничены одним аккумулятором.
Вывод состоит в том, что, хотя некоторые из микроконтроллеров PIC быстрее, но с AVR лучше работать с точки зрения ассемблеров.
Цена и наличиеЕсли говорить о цене, то и PIC, и AVR очень похожи .Оба доступны в основном по одинаковой цене. Что касается доступности, то PIC удалось доставить продукты в оговоренные сроки по сравнению с AVR, поскольку Microchip всегда придерживалась политики коротких сроков поставки. Компания Atmel пережила трудные времена, поскольку широкий ассортимент продукции означает, что AVR являются небольшой частью их бизнеса, поэтому другие рынки могут иметь приоритет над AVR в отношении производственных мощностей. Поэтому рекомендуется использовать PIC с точки зрения графиков поставок, тогда как AVR может иметь решающее значение для производства. Детали микрочипов обычно более доступны, особенно в небольших количествах.
Прочие функцииИ PIC, и AVR доступны в различных пакетах. PIC выпускает больше версий, чем AVR. У этого развертывания версии могут быть свои плюсы и минусы в зависимости от приложений, например, большее количество версий создает путаницу при выборе подходящей модели, но в то же время обеспечивает большую гибкость. Последние версии PIC и AVR очень маломощны и работают в различных диапазонах напряжения. Часы и таймеры PIC более точны, но с точки зрения скорости PIC и AVR очень похожи на .
Atmel Studio 7 добавила производственные файлы ELF, которые включают данные EEPROM, Flash и предохранители в одном файле. Принимая во внимание, что AVR интегрировал данные предохранителя в свой шестнадцатеричный формат файла, поэтому предохранитель может быть установлен в коде. Это позволяет PIC легче переносить проект в производство.
ЗаключениеPIC и AVR – отличные недорогие устройства, которые не только используются в промышленности, но и являются популярным выбором среди студентов и любителей.Оба широко используются и имеют хорошие сети (форумы, примеры кода) с активным присутствием в сети. Оба имеют хороший охват сообщества и поддержку, и оба доступны в широких размерах и форм-факторе с периферийными устройствами, не зависящими от ядра. Microchip взял на себя Atmel и теперь занимается как AVR, так и PIC. В конце концов, понятно, что изучение микроконтроллера похоже на изучение языков программирования, поскольку изучение другого будет намного проще, если вы выучите один.
Само собой разумеется, что кто бы ни победил, но почти во всех отраслях техники нет такого слова, как «лучший», тогда как «наиболее подходящее для применения» – это хорошо подходящая фраза.Все зависит от требований к конкретному продукту, метода разработки и производственного процесса. Так что в зависимости от проекта можно выбрать подходящий микроконтроллер из PIC и AVR.
Разница между AVR и PIC
Микроконтроллер представляет собой единую интегральную схему (ИС), которая сравнима с небольшим автономным компьютером и предназначена для выполнения конкретных задач встроенных систем. Микроконтроллер содержит процессор и небольшой объем памяти (ПЗУ, ОЗУ и т. Д.).), несколько портов ввода / вывода для периферийных устройств, таймер и т. д. AVR и PIC относятся к семейству микроконтроллеров. Микроконтроллер PIC и микроконтроллер AVR отличаются друг от друга с точки зрения разной архитектуры и разных наборов инструкций, скорости, преобразования, памяти, энергопотребления, ширины шины и т. Д. Теперь давайте подробно разберемся, чем они отличаются друг от друга.
1. Микроконтроллер AVR:
Микроконтроллер AVR произведен корпорацией Atmel в 1996 году. Он основан на архитектуре набора команд RISC (ISA) и также называется Advanced Virtual RISC.AT90S8515 был первым микроконтроллером, принадлежащим семейству AVR. Микроконтроллер AVR – самая популярная категория контроллеров, и она недорогая. Он используется во многих роботизированных приложениях.
2. Микроконтроллер PIC:
PIC означает контроллер периферийного интерфейса. Микроконтроллер PIC был разработан Microchip. Этот микроконтроллер является очень быстрым и простым микроконтроллером с точки зрения реализации и производительности. Этот микроконтроллер легко программировать, а также легко взаимодействовать с другими периферийными устройствами.
Разница между AVR и PIC:
| S. | AVR | PIC |
|---|---|---|
| 01. | AVR означает Advanced Virtual RISC микроконтроллер. | PIC – это микроконтроллер контроллера периферийного интерфейса. |
| 02. | Ширина шины микроконтроллера AVR составляет 8/32 бит. | Ширина шины микроконтроллера PIC составляет 8/16/32 бит. |
| 03. | Он поддерживает протокол связи UART, USART, SPI, I2C. | Он поддерживает протокол связи PIC, UART, USART, LIN, CAN, Ethernet, SPI. |
| 04. | Его скорость составляет 1 такт / цикл инструкции. | Его скорость составляет 4 такта / цикл команд. |
| 05. | Микроконтроллер AVR основан на архитектуре набора команд RISC. | Микроконтроллер PIC основан на некоторых особенностях архитектуры набора команд RISC. |
| 06. | Он основан на архитектуре Гарварда. | Он основан на модифицированной архитектуре Хаварда. |
| 07. | Семейства AVR включают Tiny, Atmega, Xmega, AVR специального назначения. | Семейства PIC включают PIC16, PIC17, PIC18, PIC24, PIC32. |
| 08. | Производитель микроконтроллера AVR – Atmel. | Производитель микроконтроллера PIC – Microchip. |
| 09. | Очень дешевый и эффективный микроконтроллер. | Очень дешевый микроконтроллер. |
| 10. | Популярные микроконтроллеры: Atmega8, 16, 32, Arduino Community. | Популярные микроконтроллеры: PIC18fXX8, PIC16f88X, PIC32MXX. |
Вниманию читателя! Не прекращайте учиться сейчас. Получите все важные концепции теории CS для собеседований SDE с помощью курса CS Theory Course по приемлемой для студентов цене и будьте готовы к работе в отрасли.
100+ проектов микроконтроллеров Pic с исходными кодами
Проекты микроконтроллеровPic очень популярны среди студентов, изучающих электротехнику и электронику.Микроконтроллеры PIC – это семейство микроконтроллеров, разработанных компанией Microchip. Микроконтроллеры Pic использовали архитектуру Гарварда. Микроконтроллеры PIC доступны в широком диапазоне, от 8-битных до 32-битных микроконтроллеров. Микроконтроллеры DSPIC также очень известны в области цифровой обработки сигналов. Семейство микроконтроллеров PIC16F очень популярно среди студентов-инженеров и профессионалов. Список проектов микроконтроллеров Pic представлен ниже. Микроконтроллеры серии PIC16F используются практически во всех проектах из этого списка.В этом списке представлены проекты микроконтроллеров pic на базе микроконтроллеров PIC16, PIC18 и Dspic.
Проекты микроконтроллеров picКаждый год многие студенты, изучающие электротехнику и электронику, работают над различными проектами микроконтроллеров pic. Микроконтроллеры Pic очень известны среди студентов инженерных специальностей. Микроконтроллеры PIC просты в использовании благодаря удобному компилятору Mikro C. В этой статье я перечислил лучшие проекты микроконтроллеров pic. Эти проекты содержат полную принципиальную схему, моделирование и программирование.В этих статьях я постарался осветить все до единого. Если вы хотите включить свой проект в этот список, пишите в комментариях. Я буду рад поделиться вашим проектом с другими.
Полный список проектов микроконтроллеров PIC:
Этот проект состоит из измерения переменного тока с помощью трансформатора тока и дифференциального усилителя. Он также содержит исходный код с пошаговым руководством.
Этот проект посвящен измерению переменного напряжения с помощью микроконтроллера PIC16F877A.Обсуждаются два метода измерения напряжения; один – это метод разностного усилителя, а другой – с использованием трансформатора напряжения.
Управление скоростью двигателя постоянного тока объясняется пошаговыми инструкциями по управлению скоростью с помощью метода широтно-импульсной модуляции. Он также включает моделирование Proteus и исходный код.
В этом проекте цифровой датчик температуры разработан с использованием датчика температуры LM35 и жидкокристаллического дисплея. АЦП используется для измерения аналогового выхода датчика температуры.
Может использоваться для измерения частоты прямоугольных сигналов. Таймеры и внешние прерывания настроены на измерение частоты. ЖК-дисплей отображает это измеренное значение.
Цифровой проект влажности измеряет влажность с помощью датчика Sh21. Датчик Ш21 – датчик емкостного типа. Цепь таймера 555 используется вместе с датчиком Ш21.
Он используется для преобразования постоянного напряжения в переменное напряжение с чистой синусоидой. Full H-Bridge используется в качестве преобразователя. Драйвер МОП-транзистора IR2110 управляет МОП-транзисторами H-моста.PIC16F877A используется для подачи сигналов SPWM и для управления переключателями.
Это полная конструкция однофазного синусоидального инвертора. Он включает преобразователь постоянного тока в постоянный, который преобразует 12 вольт постоянного тока в 320 вольт постоянного тока. Этот постоянный ток на 320 вольт подается на H-мост, который преобразует его в источник переменного тока напряжением 220 вольт с помощью метода SPWM.
Система мониторинга теплицы контролирует различные параметры теплицы, такие как температура, влажность, интенсивность света и влажность почвы. Он также управляет освещением, водяным насосом, вентилятором и душем в соответствии с параметрами этих датчиков.
Эта система защиты от напряжения обеспечивает защиту от пониженного и повышенного напряжения основного источника питания переменного тока. Если напряжение колеблется между минимальным или максимальным пределом, это устройство запускает реле, чтобы изолировать устройства от основного источника переменного тока.
Интеллектуальный контроллер солнечного заряда разработан с использованием технологии ШИМ. Он используется для эффективной зарядки аккумуляторов от солнечных батарей. Это продлевает срок службы батареек.
Он автоматически управляет уличным освещением в зависимости от интенсивности света.Если интенсивность света падает ниже определенного предела видимости, он включает уличный фонарь и наоборот.
Этот проект про робота, который путешествует по черной линии. ИК-датчики определяют черную линию. По выходным сигналам датчиков робот следует черной линией.
ATS используется для автоматического переключения нагрузки с одного источника на другой. Например, если у вас два источника питания; один – от сети переменного тока, другой – от генератора. При отключении основного источника питания ATS может автоматически включить генератор и переключить нагрузку на генератор.
Понижающие преобразователииспользуются для понижения постоянного напряжения. Этот проект снижает напряжение постоянного тока и обеспечивает стабилизированное напряжение на выходе.
Как и в предыдущем проекте, он используется для повышения постоянного напряжения. Этот проект используется для получения регулируемого повышающего напряжения на выходе.
Может использоваться для автоматического управления интенсивностью уличного освещения в зависимости от процента доступного света. Этот проект можно использовать для экономии энергии от уличных фонарей.
Состоит из датчика влажности почвы и водяного насоса.Датчик влажности почвы измеряет уровень влажности почвы и автоматически включает или выключает водяной насос в зависимости от потребности в воде в почве. Пользователь также может добавить функциональность GSM. Используя модуль GSM, пользователь может проверить уровень почвы через sms и отправить сообщение для управления водяным насосом.
Солнечные панели работают за счет солнечного света. Они обеспечивают лучшую эффективность при ярком солнечном свете, а их эффективность снижается в тени. Солнечная система слежения поворачивает панели в сторону большого угла освещения, измеряя интенсивность света через резисторы, зависящие от света.
Как и другими роботами, роботом-металлоискателем можно управлять удаленно или через Wi-Fi. Как только он обнаруживает металл в своем окружении, он посылает пользователю сигнал тревоги посредством обнаружения металла через радиочастотную связь.
ПанелиPV обеспечивают на выходе постоянное напряжение, постоянный ток и энергию. Этот проект измеряет солнечную энергию вместе с напряжением и током, отображает ее значение на ЖК-дисплее.
В отличие от солнечного трекера на основе света, солнечный трекер на основе времени автоматически вращается в соответствии со временем.Солнце вращается в зависимости от времени суток. Пришло время отрегулировать вращение.
ЦепиZCD используются в схемах силовой электроники для переключения при пересечении нуля синусоидальной волны, чтобы избежать потерь при переключении. Этот проект микроконтроллера pic обнаруживает пересечение нуля и выдает выходной сигнал в виде импульса на выходном контакте PIC16F877A.
В источниках питания переменного тока коэффициент мощности очень важен для определения эффективности силовых устройств и систем питания. Этот измеритель коэффициента мощности может использоваться для измерения коэффициента мощности однофазных устройств.
Мощность переменного тока измеряется в ваттах. Этот однофазный измеритель мощности переменного тока предназначен для измерения мощности переменного тока в ваттах. Он также известен как ваттметр.
В энергосистеме конденсаторы используются для увеличения коэффициента мощности, а индуктивные нагрузки являются источником снижения коэффициента мощности. Проект APFC измеряет коэффициент мощности и автоматически подключает батареи конденсаторов к нагрузке для регулировки мощности.
Это устройство используется для измерения постоянного напряжения. Он состоит из делителя напряжения и аналого-цифрового преобразователя.Схема делителя напряжения снижает напряжение ниже 5 вольт, и микроконтроллер измеряет это напряжение.
Это полный список проектов микроконтроллеров pic с использованием PIC16F877A, PIC18452, PIC18F4550, PIC18F46K22 и многих других микроконтроллеров pic.
Разница между микроконтроллерами AVR, ARM, 8051 и PIC
В настоящее время микроконтроллеры настолько дешевы и просты в получении, что их обычно используют вместо простых логических схем, таких как счетчики, с единственной целью получить некоторую гибкость конструкции и уменьшить пространство.Некоторые машины и роботы даже полагаются на огромное количество микроконтроллеров, каждый из которых с энтузиазмом выполняет свою задачу. В основном новые микроконтроллеры являются «программируемыми в системе», это означает, что вы можете настраивать выполняемую программу, не снимая микроконтроллер с его позиции. В этой статье мы обсуждаем разницу между микроконтроллерами AVR, ARM, 8051 и PIC.
Разница между микроконтроллерами AVR, ARM, 8051 и PIC
Различия между микроконтроллерами в основном заключаются в том, что такое микроконтроллер, разница между микроконтроллерами AVR, ARM, 8051 и PIC и их приложениями.
Что такое микроконтроллер?
Микроконтроллер можно сравнить с маленьким автономным компьютером; это чрезвычайно мощное устройство, способное выполнять ряд заранее запрограммированных задач и взаимодействовать с дополнительными аппаратными устройствами. Будучи упакованным в крошечную интегральную схему (ИС), размер и вес которой обычно незначительны, он становится идеальным контроллером для роботов или любых машин, требующих некоторого типа интеллектуальной автоматизации. Одного микроконтроллера может хватить для управления небольшим мобильным роботом, автоматической стиральной машиной или системой безопасности.Несколько микроконтроллеров содержат память для хранения исполняемой программы и множество линий ввода / вывода, которые можно использовать для совместной работы с другими устройствами, например для считывания состояния датчика или управления двигателем.
8051 Микроконтроллер
Микроконтроллер 8051 – это 8-битное семейство микроконтроллеров, разработанное Intel в 1981 году. Это одно из популярных семейств микроконтроллеров, используемых во всем мире. Кроме того, этот микроконтроллер назывался «системой на кристалле», поскольку он имеет 128 байт ОЗУ, 4 Кбайт ПЗУ, 2 таймера, 1 последовательный порт и 4 порта на одном кристалле.ЦП также может работать с 8 битами данных за раз, поскольку 8051 является 8-битным процессором. Если размер данных превышает 8 бит, их необходимо разбить на части, чтобы ЦП мог легко их обработать. Большинство производителей содержат 4 Кбайт ПЗУ, хотя количество ПЗУ может быть превышено до 64 Кбайт.
Микроконтроллер 8051Микроконтроллер 8051 использовался в большом количестве устройств, в основном потому, что его легко интегрировать в проект или приблизительно создать устройство. Ниже приведены основные направления деятельности:
.Управление энергопотреблением: Эффективные измерительные системы помогают контролировать потребление энергии в домах и на производстве.Эти измерительные системы подготовлены с возможностью включения микроконтроллеров.
Сенсорные экраны: Многие поставщики микроконтроллеров включают в свои проекты сенсорное управление. Портативная электроника, такая как сотовые телефоны, медиаплееры и игровые устройства, являются примерами сенсорных экранов на основе микроконтроллеров.
Автомобили: Модель 8051 находит широкое применение в автомобильных решениях. Они широко используются в гибридных транспортных средствах для работы с вариантами двигателей.Кроме того, такие функции, как круиз-контроль и анти-тормозная система, были подготовлены более функциональными с использованием микроконтроллеров.
Медицинские устройства: Передвижные медицинские устройства, такие как мониторы артериального давления и глюкозы, используют микроконтроллеры для отображения данных, что обеспечивает более высокую надежность в предоставлении медицинских результатов.
Микроконтроллер PIC
Контроллер периферийного интерфейса(PIC) – это микроконтроллер, разработанный Microchip, микроконтроллер PIC – это быстрая и простая в реализации программа, по сравнению с другими микроконтроллерами, такими как 8051.Простота программирования и простота взаимодействия с другими периферийными устройствами PIC стали успешным микроконтроллером.
PIC MicrocontrollerМы знаем, что микроконтроллер – это интегрированная микросхема, которая состоит из RAM, ROM, CPU, ТАЙМЕРА и СЧЕТЧИКОВ. PIC – это микроконтроллер, который также состоит из RAM, ROM, CPU, таймера, счетчика, ADC (аналого-цифрового преобразователя), DAC (цифро-аналогового преобразователя). Микроконтроллер PIC также поддерживает такие протоколы, как CAN, SPI, UART для взаимодействия с дополнительными периферийными устройствами.PIC в основном используется для изменения архитектуры Гарварда, а также поддерживает RISC (компьютер с сокращенным набором инструкций) в соответствии с вышеуказанным требованием. RISC и Гарвард, мы можем просто, что PIC быстрее, чем контроллеры на основе 8051, которые подготовлены на основе архитектуры Von-Newman.
Микроконтроллер AVR
МикроконтроллерAVR был разработан в 1996 году корпорацией Atmel. Конструктивная конструкция AVR была разработана Альф-Эгилем Богеном и Вегардом Волланом. AVR получил свое название от своих разработчиков и означает микроконтроллер Alf-Egil Bogen Vegard Wollan RISC, также известный как Advanced Virtual RISC.AT90S8515 был первым микроконтроллером, основанным на архитектуре AVR, хотя первым микроконтроллером, появившимся на коммерческом рынке, был AT90S1200 в 1997 году.
Микроконтроллер AVRМикроконтроллеры AVR доступны в трех категориях
TinyAVR: – Меньше памяти, небольшой размер, подходит только для более простых приложений
MegaAVR: – Это наиболее популярные из них с большим объемом памяти (до 256 КБ), большим количеством встроенных периферийных устройств и подходящими для скромных и сложных приложений.
XmegaAVR: – Используется в коммерческих для сложных приложений, требующих большой памяти программ и высокой скорости.
Процессор ARM
Процессор ARM также является одним из семейства процессоров, основанных на архитектуре RISC (компьютер с сокращенным набором команд), разработанной Advanced RISC Machines (ARM).
ARM микроконтроллерARM производит 32-битные и 64-битные многоядерные процессоры RISC. Процессоры RISC предназначены для выполнения меньшего количества типов компьютерных инструкций, чтобы они могли работать с более высокой скоростью, выполняя дополнительные миллионы инструкций в секунду (MIPS).Удаляя ненужные инструкции и оптимизируя пути, процессоры RISC обеспечивают выдающуюся производительность в части потребляемой мощности процедуры CISC (вычисления со сложным набором команд).
Процессоры ARMшироко используются в электронных устройствах клиентов, таких как смартфоны, планшеты, мультимедийные проигрыватели и другие мобильные устройства, например носимые устройства. Поскольку они сокращены до набора команд, им требуется меньше транзисторов, что позволяет уменьшить размер кристалла интегральной схемы (ИС).Процессоры ARM, меньший размер, меньшая сложность и меньшее энергопотребление делают их подходящими для все более миниатюрных устройств.
Основное различие между микроконтроллерами AVR, ARM, 8051 и PIC
8051 | ПИК | АВР | АРМ | |
Ширина шины | 8-битный для стандартного ядра | 8/16/32-бит | 8/32-бит | 32-разрядная версия в основном также доступна в 64-разрядной версии |
Протоколы связи | UART, USART, SPI, I2C | PIC, UART, USART, LIN, CAN, Ethernet, SPI, I2S | UART, USART, SPI, I2C, (поддержка AVR специального назначения CAN, USB, Ethernet) | UART, USART, LIN, I2C, SPI, CAN, USB, Ethernet, I2S, DSP, SAI (последовательный аудиоинтерфейс), IrDA |
Скорость | 12 Такт / цикл команд | 4 Такт / цикл команд | 1 такт / цикл команд | 1 такт / цикл команд |
Память | ПЗУ, SRAM, ВСПЫШКА | SRAM, ВСПЫШКА | Вспышка, SRAM, EEPROM | Вспышка, SDRAM, EEPROM |
ISA | CLSC | Некоторые особенности RISC | RISC | RISC |
Архитектура памяти | Архитектура фон Неймана | Гарвардская архитектура | Изменено | Модифицированная гарвардская архитектура |
Потребляемая мощность | Среднее значение | Низкий | Низкий | Низкий |
Семьи | 8051 варианты | PIC16, PIC17, PIC18, PIC24, PIC32 | Tiny, Atmega, Xmega, AVR специального назначения | ARMv4,5,6,7 и серия |
Сообщество | Большой | Очень хорошо | Очень хорошо | Большой |
Производитель | NXP, Atmel, Silicon Labs, Даллас, Кипр, Infineon и т. Д. | Среднее значение микрочипа | Атмель | Apple, Nvidia, Qualcomm, Samsung Electronics и TI и т. Д. |
| Стоимость (по сравнению с предоставленными функциями) | Очень низкий | Среднее значение | Среднее значение | Низкий |
Прочие характеристики | Известен своим стандартом | дешевые | Дешевая, эффективная | Высокая скорость работы Большой |
Популярные микроконтроллеры | AT89C51, P89v51 и др. | PIC18fXX8, PIC16f88X, PIC32MXX | Atmega8, 16, 32, Сообщество Arduino | LPC2148, от ARM Cortex-M0 до ARM Cortex-M7 и т. Д. |
Таким образом, в этом вся разница между микроконтроллерами AVR, ARM, 8051 и PIC. Мы надеемся, что вы лучше понимаете эту концепцию. Кроме того, любые вопросы относительно этой концепции или реализации проектов в области электроники и электротехники, пожалуйста, дайте свои ценные предложения в комментариях в разделе комментариев ниже.Вот вам вопрос, какие приложения у AVR и ARM?
В чем основное различие между PIC и AVR? | автор J3 | Jungletronics
Сборник ответов специалистов
Привет, это подборка с форума сайта Quora:
Сарвеш Праджапати, изучал GATE Aspirants на Graduate Aptitude Test in Engineering (2018) Ответил 11 января 2018 Вот несколько основанных на сравнении по актуальным вопросам, с которыми я сталкивался на реальных проектах. В основном они основаны на использовании ассемблера на AT90S и текущих частях ATTiny и ATMega, а также на частях PIC12 / PIC16.Надеюсь, эта информация поможет вам решить, что может быть лучше для вас. В каких PIC лучше, чем AVR. Набор инструкций / архитектура (для пользователей Assembler) PIC good: Небольшой набор инструкций означает, что вы можете выучить его буквально за день. Пропуск инструкций часто может упростить управление потоком. AVR плохо: набор инструкций в значительной степени неортогонален - многие операции могут выполняться только с определенными регистрами. Относительный диапазон ветвлений может заставить код располагаться в нелогическом порядке. Нет немедленной инструкции XOR. Нелогичная смесь инструкций по управлению потоком пропуска и ветвления (если бы только они сделали STATUS одним из регистров, по которым вы могли бы пропускать….!). Часы и т. Д. На последних фотографиях (12Fxxx и т. Д.) Есть более точно откалиброванные RC-генераторы. Пробуждение Watchdog из спящего режима продолжается после инструкции SLEEP - на AVR это вызывает сброс, что может усложнить ситуацию. задержка постоянна - если вы настроите регулярное прерывание по таймеру на PIC, оно будет происходить каждый раз с точно таким же интервалом. На AVR вы получите по крайней мере один джиттер цикла. ADC Намного более быстрая скорость преобразования, чем ввод-вывод AVR, а операции ввода-вывода с битовыми битами такие же, как и в других файловых регистрах, поэтому операции, отличные от операций установки / очистки битов, требуют меньше работы - биты могут быть переключены с помощью XORWF, несколько битов могут быть установлены или сброшены одновременно с помощью ANDWF или IORWF, и вы можете выполнять изящные трюки, такие как использование выходного порта в качестве регистра сдвига для действительно быстрой генерации шаблона.Последний не часто бывает полезен, но позволяет использовать такие изящные вещи, как генерация видео. Порты ввода / вывода имеют гораздо лучшие возможности привода - выходной высокий уровень легко способен обеспечить несколько миллиампер без значительного падения напряжения - полезно для непосредственного включения периферийных устройств (например, операционные усилители) по запросу для энергосбережения. PIC может выходить из спящего режима с помощью коротких импульсов и фронтов. Счетчики асинхронны и могут считать, пока компонент находится в спящем режиме, и считать быстрее, чем тактовая частота процессора. AVR не может просыпаться по краям (за исключением нескольких частей, которые просыпаются при смене вывода), и прерывания, запускаемые по уровню, должны быть утверждены до тех пор, пока микросхема не проснется и не запустятся часы, в противном случае часть вернется в спящий режим.Настройка вывода сброса AVR как ввода / вывода отключает внутрисхемное программирование. На PIC вывод сброса может быть сконфигурирован как вход без отключения последовательного программирования, при условии, что все, что к нему подключено, позволяет запрограммировать напряжение 12,5 В. Доступность Microchip всегда придерживалась политики коротких сроков поставки, и никогда не было значительной нехватки выпущенных деталей. . В прошлом у Atmel были очень плохие времена - их широкий ассортимент продукции означает, что AVR составляют небольшую часть их общего бизнеса, поэтому другие рынки могут иметь приоритет над AVR в отношении производственных мощностей.Microchip теперь имеет испытательную ячейку с быстрым оборотом для производства устройств в короткие сроки (с надбавкой к цене). Детали микрочипов, как правило, более доступны, особенно в небольших количествах. Microchip сохраняет старые детали доступными еще долгое время после того, как они были заменены. Вы все еще можете купить PIC16C54XT, несмотря на то, что сейчас они находятся на четвертой версии. У Atmel гораздо меньше деталей, но многие из них устарели - например, Модель 90S4414 дважды устарела .------------------------------------------- --------------------- От Питера Хэнда
Ответил 9 сентября 2014 г. Первоначально ответил: Каковы важные различия между платформами микроконтроллеров PIC и AVR? Давайте сузим это до разница между 8-битными PIC и базовыми AVR..PIC требуется несколько тактов для каждой инструкции. AVR выполняет большинство инструкций за один такт. PIC имеет небольшой фиксированный аппаратный стек, поэтому подпрограммы не могут быть размещены очень глубоко, а компилятор C не может создать кадр стека. AVR имеет указатель стека, который может адресовать всю доступную RAM..PIC может напрямую адресовать только 256 байтов RAM, которые должны быть переключены с помощью дополнительных инструкций. AVR может напрямую адресовать 64k ... Единственный бесплатный компилятор PIC C - это урезанное ПО. AVR имеет полностью функциональный бесплатный компилятор GCC, поддерживаемый большой командой..PIC имеет регистр W. AVR имеет 32 регистра общего назначения, включая три пары, которые можно использовать в качестве указателей .---------------------------------- ------------------------------ Берт Веррикен, основатель, ASIC и FPGA SoC design 4 AI и GPU delisHDL.com Ответ дан 9 января , 2018 Первоначально ответили: В чем разница между PIC и AVR? Краткий ответ: набор инструкций. Длинный ответ: PIC - это бренд компании Microchip, AVR - это Atmel. И PIC, и AVR - это семейства микроконтроллеров. Семейное значение, разные версии контроллера.Есть сходство между версиями PIC и версиями AVR. В зависимости от области применения, доступности и цены у разработчиков есть выбор между версиями PIC и AVR. Microchip приобретает Atmel: Microchip Technology, Inc. приобретает Atmel. В конечном итоге может произойти слияние PIC и AVR. Нет смысла (по крайней мере, для меня) поддерживать в живых две отдельные цепочки инструментов. В семействе контроллеров по-прежнему будут необходимы определенные инструменты (компиляторы), но теперь AVR и PIC больше не конкурируют, они принадлежат одной и той же компании.С точки зрения эффективности и стоимости один суббренд имеет смысл. Но я мог ошибаться .-------------------------------------------- -------------------- Автор: Vinay Chaddha, играет с микроконтроллерами с 1979 года Ответ 19 июня 2013 г. Первоначальный ответ: Каковы важные различия между платформами микроконтроллеров PIC и AVR? От разных поставщиков , распиновка, инструкции, программное обеспечение (IDE и компилятор) и различные инструменты для записи. Однако они выполняют аналогичные функции.Или скажу такую же разницу, как машины от Maruti Suzuki и Hyndai.У обоих есть большой выбор автомобилей, эксклюзивные выставочные залы и сервисные станции, и им нужны разные запчасти, которые могут не подходить к другим моделям. Однако вы можете купить у любого из них. Они выполняют те же функции.
------------------------------------------------- --------------- От
Вагнер Липнхарски, консультант Atmel AVR Ответ 10 января 2018 г. Это совершенно разные микроконтроллеры. Сравнивать их - это то же самое, что сравнивать яблоки с морковью. Они используют другую архитектуру, совершенно другой набор инструкций, ненормально другой способ обработки инструкций - AVR делает это за один такт, PIC нужно четыре, поразительные различия в полезных регистрах - AVR имеет 32, PIC имеет один и так далее.Я всегда буду выбирать AVR, потому что давным-давно уже хорошо продумал и сравнил оба. Мне очень нравится писать код на ассемблере, этой единственной проблемы было достаточно, чтобы выбрать AVR, поскольку сборка PIC запутана и непрактична из-за меньшего количества инструкций и отсутствия перехода по условию - она становится длинной, макаронной .----- -------------------------------------------------- --------- Тарун Агарвал, технический директор по электронике и электротехнике Ответ дан 20 июня 2016 г. Первоначальный ответ: Встроенные системы: в чем заключаются важные различия между платформами микроконтроллеров PIC и AVR? AVR имеют небанковский доступ к памяти данных, тогда как Похоже, что для PIC требуется установка регистров банка для доступа к памяти, превышающей 256 байт.Кроме того, некоторые AVR поддерживают подключение внешней SRAM таким образом, чтобы MCU мог использовать ее изначально (вместо того, чтобы проходить серию обращений к портам). AVR имеет 32 регистра общего назначения, а PIC имеет только один. (большинство из них), стек содержится в SRAM, а не ограничен встроенным аппаратным стеком. Напротив, с PIC это на одну проблему меньше. ATmega и PIC18F имеют аппаратные умножители, а ATtiny и PIC16F - нет. AVR, похоже, поддерживают более общую систему прерываний (напоминает мне таблицу векторов прерываний x86), поскольку в отличие от векторов прерываний с высоким / низким приоритетом PIC.PIC18F представляется значительным улучшением по сравнению с PIC16F. ATmega имеет некоторые преимущества перед ATtiny, но в основном по емкости, а не по функциям. И наоборот, переключаться между ними, вероятно, намного проще, чем между PIC16F и PIC18FA. Хотя тактовые частоты PIC кажутся выше, кажется, что тактовая частота делится на четыре, чтобы получить фактическую скорость выполнения команд. У PIC16F размер памяти указан в 14-битном формате. слов, в то время как PIC18F и AVR перечисляют свои размеры программ в байтах, поэтому размер программы PIC16F больше, чем может указывать просто число K.AVR, похоже, является целью GCC .------------------------------------------ ---------------------- От
Первоначальный ответ: В чем разница между PIC и AVR? AVR и PIC - это два семейства микроконтроллеров, которые работают в Подобный способ. Оба имеют флэш-память, EEPROM, порты ввода-вывода, пространство RAM, таймеры и счетчики, USART, CCP (захват / сравнение / PWM - специальный регистр для выполнения расширенных функций), SSP (синхронный последовательный порт), компараторы, АЦП (аналоговый -цифровой преобразователь), компараторы.Все могут использовать ICSP (внутрисхемный последовательный программатор (ing)). Оба они могут быть запрограммированы на языке ассемблера или, чаще, на C или C ++. Каждому семейству требуются разные IDE для разработки кода, используются разные мнемоники на языке ассемблера и используются разные ICSP (и эмуляторы ICE-In-Circuit). Мне довелось знать оба набора микроконтроллеров и владеть обоими наборами инструментов и программного обеспечения. Их приятно использовать, и они очень эффективны. Оба набора микроконтроллеров имеют разные распиновки, иногда разные имена контактов (функции), НО по сути это то же самое, что владение Ford и автомобилем GM.Они работают одинаково, но имеют много общего (и различий) между двумя семействами автомобилей. Microchip (который составляет семейство микроконтроллеров PIC) и ATMEL (… AVR) недавно объединились. -------------------------------------------------- - Автор:
Рахул Трипати, студент Делийского университета Дели (2016 г. - настоящее время). Ответ 3 января 2018 г. У PIC есть MPLAB X, который довольно стабилен (v3.15) и прост в использовании, как с ассемблером, так и с языком C. Инструменты микрочипа, такие как отладчик и программатор PICkit3, обычно очень хорошо работают из MPLAB X.Это намного лучше, чем более старая среда MPLAB 8.x, с лучшей интеграцией отладчика, лучшей компоновкой и гораздо более стабильной. AVR имеет AtmelStudio 7, который имеет сопоставимые функции, но он огромен (750 МБ), поскольку он использует фреймворки Microsoft, как и MPLAB X, но Atmel Studio большой и неуклюжий. Он имеет множество дополнительных функций, таких как решения и доступ в Интернет, которые делают его более сложным, чем он должен быть. Мы обнаружили, что многие люди, особенно при использовании ноутбуков, сталкиваются с трудностями при установке и очень плохо работают.Они возвращаются к старой версии AVR Studio 4.18 (с пакетом обновления 3), поскольку она работает намного лучше и имеет все необходимые функции. Старый эмулятор JTAGICE также поддерживается AVR Studio 4, но не более поздними версиями. Инструменты отладки, такие как AVR Dragon, работают нормально во всех версиях. Нажмите здесь, чтобы узнать больше !! Программа обучения AVRВсе самое лучшее !!! ------------------------------------------ ---------------------- Автор
Ари Фолкнер, работает в Software Engineering Ответ: 17 ноября 2013 г. Первоначальный ответ: Каковы важные различия между микроконтроллерными платформами PIC и AVR? 8-битные AVR имеют 26 рабочих регистров, в то время как их эквиваленты PIC имеют только 1, знаменитый регистр «W».Кроме того, AVR XMega имеет привлекательную систему межпериферийных событий, а также полную поддержку DMA, шаги, которые пытаются снизить функциональность ARM до 8-битных микроконтроллеров с частотой 32 МГц.
------------------------------------------------- --------------- Автор
Чандан Кумар (चन्दन कुमार), более 4 лет опыта работы со встроенными системамиОтвет 31 мая 2017 г. Спасибо за A2A, их архитектура иная функциональность такие же, как программирование gpio , таймер, счетчик, интерфейс устройства отображения, прерывания и протокол связи.Просто обе разные компании и производят микроконтроллеры. В avr у нас есть такие серии, как attiny, atmega, atxmega и т. Д., В то время как в pic у нас есть серии, такие как pic 12f, 16f, 18f, 24f и т. Д.
Пожалуйста, посетите исходный сайт:
https://www.quora.com / Какая-основная-разница-между-PIC-и-AVR
Спасибо!
Основы микроконтроллеров – Сборка электронных схем
Мне нравилось изучать основы микроконтроллеров, когда я учился. Это означало, что я мог начать использовать микроконтроллеры в своих проектах в области электроники.Мне казалось, что с этим знанием меня невозможно остановить. Я мог построить ВСЕ!
И это действительно так. Микроконтроллеры – мощные компоненты. Они позволяют вам писать программы для управления вашей электроникой. Объедините эти знания с тем, как создавать собственные печатные платы, и вы получите потрясающие вещи.
Используя микроконтроллер в вашем проекте, вы получите доступ к огромному количеству функций кончиками ваших (программирующих) пальцев.
Какой микроконтроллер использовать?
На рынке доступно множество типов микроконтроллеров.Некоторые из них проще в использовании, чем другие.
Доступны 8-битные, 16-битные и 32-битные микроконтроллеры. Самые простые микроконтроллеры – 8-битные. Они могут многое, но не справляются с операциями, требующими тяжелых вычислений.
Я не буду здесь перечислять их все. Но два семейства 8-битных микроконтроллеров, которыми легко пользоваться как любителям, так и новичкам, – это AVR и PIC. Они отлично подходят для изучения основ микроконтроллера.
AVR – это микроконтроллер, который я использовал чаще всего.Это действительно популярно среди любителей. PIC – это Microchip. Я не использовал PIC, но люди говорят, что это хорошо. Он также очень популярен среди любителей.
Существует несколько типов микроконтроллеров PIC и AVR. Что отличает их, так это объем памяти, количество контактов ввода-вывода и типы периферийных устройств, которые у них есть. Периферийные устройства выполняют такие функции, как широтно-импульсная модуляция, аналого-цифровое преобразование, последовательный периферийный интерфейс, I2C и т. Д.
Если вам нужен только простой микроконтроллер для управления включением / выключением контактов, вам не нужно беспокоиться обо всех периферийных устройствах.Просто найдите тот, у которого достаточно контактов ввода-вывода и который вам удобно программировать.
Например, посмотрите на ATtiny2313 простой и дешевый микроконтроллер для начала работы.
Основы микроконтроллеров: использование в проектах
Есть два варианта использования микроконтроллеров в проекте:
- Используйте плату микроконтроллера
- Интегрируйте микроконтроллер в вашу печатную плату
Самый простой способ начать – использовать плату микроконтроллера.
Но он будет дешевле, более компактным и менее беспорядочным, если вы интегрируете микроконтроллер в свою плату.
Использование плат микроконтроллера
Самая известная плата микроконтроллера – Arduino. Это программно-аппаратный комплекс, разработанный, чтобы упростить начало программирования микроконтроллеров. Узнайте о программировании Arduino.
Но можно найти и другие платы микроконтроллера. Обычно у них есть только микросхема микроконтроллера и необходимые компоненты для его работы.Это отличный способ протестировать микроконтроллер, которым вы раньше не пользовались.
Чтобы начать работу и изучить основы микроконтроллера, я определенно рекомендую приобрести плату Arduino. Это самый простой способ начать работу. По одному вместе с некоторыми базовыми компонентами и начинаем экспериментировать.
Щелкните здесь, чтобы получить стартовый комплект Arduino
Использование микросхем микроконтроллера
Микроконтроллер всегда имеет техническое описание, в котором описываются его функции.В техническом описании вы почти всегда найдете эталонную схему микроконтроллера.
Это позволяет легко установить и запустить плату микроконтроллера.
Я также написал учебное пособие, которое научит вас создавать собственную схему микроконтроллера с нуля. Ознакомьтесь с руководством по микроконтроллеру здесь.
(Не забудьте убедиться, что у вас есть способ программирования микроконтроллера. Это не всегда добавляется в справочную диаграмму)
Чтобы расширить основы микроконтроллера, изучите программирование микроконтроллера, чтобы узнать, как программировать микроконтроллер.
Возврат от основ микроконтроллеров к схемам электроники
неделя 9
неделя 9Цели данного задания:
1. Прочтите техническое описание микроконтроллера.
2. Запрограммируйте свою доску на что-нибудь, с максимально возможным количеством различных языков программирования и сред программирования.
3. Дополнительный кредит: поэкспериментируйте с другими архитектурами.
Групповое присвоение:
Сравните рабочие процессы производительности и разработки для других архитектур.
ВВЕДЕНИЕ В МИКРОКОНТРОЛЛЕР AVR
Микроконтроллер – это усовершенствованная версия микропроцессоров. Микроконтроллер – это используемое устройство на интегральной схеме (ИС) для управления другими частями электронной системы, обычно через микропроцессор (MPU), память и некоторые периферийные устройства. Он содержит на кристалле центральный процессор (ЦП), Постоянное запоминающее устройство (ROM), оперативное запоминающее устройство (RAM), блок ввода / вывода, контроллер прерываний и т. Д. Поэтому микроконтроллер используется для высокоскоростной обработки сигналов внутри встроенной системы.Он выступает в качестве основного компонента, используемого при проектировании встроенной системы. Микроконтроллер AVR – это электронный чип производства Atmel, который имеет ряд преимуществ перед другими типами микроконтроллеров. Мы можем понять микроконтроллер, сравнив его с персональным компьютером (ПК), внутри которого находится материнская плата. В этой материнской плате используется микропроцессор (чипы AMD, Intel), который обеспечивает интеллект, Память EEPROM и RAM для взаимодействия с системой, например, последовательные порты, интерфейсы дисплея и драйверы дисков.Микроконтроллер имеет все или большинство этих функций, встроенных в один чип, поэтому для него не требуется материнская плата и какие-либо другие компоненты. Микроконтроллер AVR поставляется в различной конфигурации, некоторые из которых разработаны с использованием поверхностного монтажа, а некоторые – с использованием всего монтажа. Он доступен с 8-контактным или 100-контактным разъемом, любой микроконтроллер с 64-контактным или более контактом предназначен только для поверхностного монтажа.
.ATmega8 микроконтроллер
.ATmega16 микроконтроллер
.ATmega32 микроконтроллер
.ATmega328 микроконтроллер
Вывод
и архитектура микроконтроллера.
ВВЕДЕНИЕ В МИКРОКОНТРОЛЛЕР PIC
PIC – это микроконтроллер с периферийным интерфейсом, который был разработан в 1993 году компанией General Instruments.
Микроконтроллеры. Он управляется программным обеспечением и запрограммирован таким образом, что выполняет различные задачи и управляет линией генерации.
Микроконтроллеры PIC используются в различных новых приложениях, таких как смартфоны, аудио аксессуары и современные медицинские устройства.
На рынке доступно множество PIC, от PIC16F84 до PIC16C84.Эти типы PIC представляют собой доступные флеш-карты.
Microchip недавно представила флеш-чипы различных типов, например 16F628, 16F877 и 18F452. 16F877 стоит вдвое дороже
из старого 16F84, но он в восемь раз больше, чем размер кода, с большим объемом оперативной памяти и гораздо большим количеством контактов ввода-вывода, UART, аналого-цифровым преобразователем и многими другими функциями.
Микроконтроллер PIC основан на архитектуре RISC. Его архитектура памяти следует гарвардскому образцу раздельной памяти для программ и данных.
с отдельными автобусами.
Pic Микроконтроллер
Архитектура PIC состоит из двух запоминающих устройств: памяти программ и памяти данных. Программная память: это пространство памяти 4K * 14. Он используется для хранения 13-битных инструкций или программного кода. Доступ к данным памяти программ осуществляется регистром счетчика программ, который содержит адрес памяти программ. Адрес 0000H используется как область памяти сброса, а 0004H используется как область памяти прерываний. Память данных: Память данных состоит из 368 байтов RAM и 256 байтов EEPROM.368 байт ОЗУ состоит из нескольких банков. Каждый банк состоит из регистров общего назначения и регистров специальных функций.
Архитектура контроллера Pic:
Вкратце, сравнение Pic и Avr выглядит следующим образом:
Сравнение Pic и Avr.
Индивидуальные задания:
Что такое лист данных?
Техническое описание, техническое описание или спецификация – это документ, в котором резюмируются рабочие характеристики и другие характеристики продукта, машины, компонента (например,г., электронный компонент), материал, подсистема (например, источник питания) или программное обеспечение с достаточной детализацией, которое позволяет покупателю понять, что представляет собой продукт, а инженеру-конструктору – понять роль компонента в системе в целом. Как правило, техническое описание создается производителем и начинается с вводной страницы с описанием остальной части документа, за которой следуют списки конкретных характеристик, с дополнительной информацией о подключении устройств. В случаях, когда необходимо включить соответствующий исходный код, он обычно прикрепляется ближе к концу документа или отделяется от другого файла.Таблицы данных создаются, хранятся и распространяются с помощью систем управления информацией о продуктах или данных о продуктах.
Что содержится в даташите?
Название производителя Номер и название продукта Список доступных форматов упаковки (с изображениями) и коды для заказа Известные свойства устройства Краткое функциональное описание Схема подключения контактов Абсолютные минимальные и максимальные рейтинги: напряжение питания, потребляемая мощность, входные токи, температуры хранения, эксплуатации, пайки и т. д. * Рекомендуемые условия эксплуатации (как абсолютные минимальные и максимальные значения) Характеристики постоянного тока (различные температуры, напряжения питания, входные токи и т. Д.) Максимальное энергопотребление во всем диапазоне рабочих температур Характеристики переменного тока (различные температуры, напряжения питания, частоты и т. Д. Диаграмма формы волны входа / выхода Временная диаграмма
Чтение таблицы данных
Для первой задачи я был сбит с толку выбором, так как существует множество микроконтроллеров с аналогичными возможностями и качествами, после обсуждения с моим инструктором я выбрал attiny44, который я использовал
на неделе 7.
При работе с электронными компонентами первое, что нужно сделать, это прочитать их техническое описание.Есть сводные и полные таблицы данных. Для получения наиболее важной и общей информации вы можете прочитать сводную информацию, поэтому я нашел следующее для Attiny 44 из таблицы данных.
Характеристики
. Высокая производительность.
. Маломощный микрочип AVR с 8-битным микроконтроллером
Конфигурация контактов
Помимо знания функций, также наиболее важно знать, какие контакты у вас есть в вашем микроконтроллере, и, следовательно, знать, где вы должны подключить компоненты, чтобы они могли работать должным образом:
Итак, контакты в attiny44:
> GND: земля.
> VCC: напряжение питания.
> Порт A (0-7): Порт A – это 8-битный двунаправленный порт ввода-вывода с внутренними подтягивающими резисторами.
> Порт B (0-3): Порт B – это 4-битный двунаправленный порт ввода-вывода с внутренними подтягивающими резисторами.
> СБРОС: сброс входа.
> MISO: ввод основных данных (данные поступают в микроконтроллер через этот вывод).
> MOSI: Вывод основных данных (данные поступают в микроконтроллер через этот вывод).
Приведенное ниже поможет нам понять конфигурацию контактов.
Конфигурация выводов attiny44.
внутренняя структура attiny44 представлена как:
Внутреннее строение аттины44
Программирование платы
В части программирования задания я использовал свою доску hello world, которую я проектировал в электронном дизайне.
Программирование платы с использованием Arduino IDE
Для программирования вашей платы с помощью Arduino IDE,
Сначала вы должны выполнить следующие шаги, чтобы IDE могла обнаружить вашу плату: Откройте «Arduino IDE»
Перейдите в «Файл» и «Настройки»
Очистите столбец «URL-адреса дополнительных плат»
Скопируйте ссылку, приведенную здесь.Вставьте его и нажмите «ОК».
Затем перейдите в «Инструменты», «Платы», «Диспетчер плат» и найдите ATTiny, как только вы найдете эту плату, установите ее.
Снова Перейдите в «Инструменты», «Платы», «Диспетчер плат» и выберите ATtiny24 / 44/84
Затем в «Процессоры» выберите соответствующую плату ieATtiny44
Теперь в «Часы» выберите источник синхронизации вашего чипа ieExternal 20MHz
Зайдите в «Программист» и выберите USBTiny ISP вместо «AVRISP mkll»
После установки всего этого нажмите на опцию «Записать загрузчик» и посмотрите, успешно ли он загружен или нет.
Если «Да», тогда продолжайте загрузку других кодов, если «Нет», то проверьте свои аппаратные соединения или повторяйте вышеуказанные шаги до тех пор, пока не будет выполнено.
программирование
После настройки моей платы я загрузил файл мигания из «Примеры», доступный в Arduino IDE. Шаги для этого упомянуты,
показано ниже, а также результаты:
Перейдите в «Файл», «Примеры», «Основы», «Мигание».
