
Схемы управления асинхронными электродвигателями | Электрооборудование и автоматизация сельскохозяйственных агрегатов
- Подробности
- Категория: Разное-архив
- РЗиА
- потребитель
- оборудование
- низковольтное
- подстанции
- среднее напряжение
Содержание материала
- Электрооборудование и автоматизация сельскохозяйственных агрегатов
- Газоразрядные лампы
- Установки для электрического освещения
- Облучение растений в теплицах
- Применение осветительных установок на птицефермах
- Установки ультрафиолетового облучения
- Установки инфракрасного нагрева
- Электротехнологические установки
- Установки электронно-ионной технологии
- Ультразвуковая техника
- Установки для магнитной обработки материалов
- Устройства для обработки сред электрическим током
- Электропривод и его основные части
- Характеристики и режимы работы электродвигателей
- Регулирование скорости в электроприводах
- Выбор электродвигателей
- Аппаратура управления электродвигателями
- Рубильники и переключатели
- Путевые выключатели
- Контакторы и электромагнитные пускатели
- Реле управления
- Тиристорные пускатели
- Логические элементы
- Плавкие предохранители
- Автоматические выключатели
- Тепловые реле и температурная зашита
- Автоматическое управление электроприводами
- Принципы управления двигателями постоянного тока
- Схемы управления асинхронными электродвигателями
- Блокировочные связи и сигнализация в схемах управления электроприводами
- Следящий привод, применение магнитных и тиристорных усилителей
- Дистанционное управление электроприводами
- Электропривод ручных инструментов и стригальных машинок
- Управление электроприводами поточных линий
- Электропривод поточных линий приготовления кормов
- Управление поточными линиями кормораздачи
- Управление электроприводами комплекса машин по удалению навоза и помета
- Эффективность и перспективы электрификации тепловых процессов, способы нагрева
- Способы охлаждения и типы холодильных машин
- Электродуговые нагреватели
- Индукционные и диэлектрические нагреватели
- Автоматизация электронагревательных установок
- Выбор и настройка автоматических регуляторов электронагревательных установок
- Электрические водонагреватели и котлы
- Электродные водогрейные и паровые котлы
- Электрооборудование и автоматизация электрокотельных, электрокалориферные установки
- Электрообогреваемые полы
- Средства местного электрообогрева
- Электрические инкубаторы
- Электрический обогрев парников и теплиц
- Установки для электротепловой обработки продуктов и кормов
- Электротерморадиационная и высокочастотная сушка
- Электротепловая обработка пищевых продуктов и кормов
- Электротермические печи
- Электросварочное оборудование
- Высокочастотные установки
- Низкотемпературные установки
- Холодильные производственные установки
- Электрооборудование и автоматизация плодо- и овощехранилищ
Страница 29 из 59
Управление двигателями с короткозамкнутым ротором.
Асинхронные электродвигатели с короткозамкнутым ротором, как правило, управляются при помощи магнитных пускателей. Пуск электродвигателей осуществляется непосредственным включением на полное напряжение.
Простейшая схема управления двигателем с нереверсивным магнитным пускателем показана на рисунке 13.1. В этой схеме предусматривается питание силовых цепей и цепей управления от одного источника напряжения.
При включении автомата F напряжение подается на силовые и вспомогательные цепи схемы. Нажатием кнопки S2 замыкается цепь катушки магнитного пускателя К, при этом главные контакты К замыкаются и включают двигатель в сеть. Одновременно блок-контакт К шунтирует кнопку S2 и дальнейшее удержание кнопки в нажатом состоянии становится ненужным.
В схеме предусмотрена защита электродвигателя от коротких замыканий и перегрузки при помощи автоматического выключателя, который для этой цели содержит комбинированный расцепитель.

Схема магнитного пускателя с кнопочными выключателями осуществляет также защиту от самопроизвольных включений электродвигателя (нулевая защита) при восстановлении напряжения питания после кратковременного его исчезновения. Повторный пуск электродвигателя возможен только после вторичного нажатия кнопки S2. В тех случаях, когда необходимо изменять направление вращения, управляют электродвигателем реверсивным магнитным пускателем, схема которого показана на рисунке 13.7.
При нажатии кнопки S2 ее размыкающий контакт, установленный в цепи катушки К1, размыкается, благодаря чему реверс электродвигателя может быть произведен без предварительного нажатия кнопки S3. Чередование фаз при этом меняется на обратное.
Для торможения асинхронных короткозамкнутых электродвигателей применяется электродинамическое торможение и торможение противовключением.

Электродинамическое торможение осуществляется путем отключения обмоток статора электродвигателя от сети переменного тока и подачей в них постоянного тока на период торможения.
Торможением противовключением осуществляется при помощи реверсивного магнитного пускателя и реле контроля скорости.
Реле состоит из постоянного магнита, вращающегося вокруг оси и соединенного с валом двигателя. Постоянный магнит помещен в цилиндр, представляющий собой устройство в виде беличьей клетки. Цилиндр укреплен на подшипниках и может поворачивайся на определенный угол до упора, при этом переключаются контакты контактного мостика. При вращении постоянного магнита его поле пересекают проводники цилиндра, индуктируя в них электрический ток. Взаимодействие индуктированного тока и вращающегося магнитного потока приводит к перемещению цилиндра и переключению контактного мостика. На рисунке 13.8 показана схема торможения методом, противовключения.
При нажатии одной из кнопок S1 или S2 замыкаются соответственно цепи катушек контакторов и статор электродвигателя подключается к сети, ротор начинает вращаться.

Рис. 13.8 Схема торможения асинхронного электродвигателя методом противовключения.
При остановке двигателя кнопкой S3 разрывается цепь ранее возбужденной катушки, отпадают контакты контакторов К1 или К2, а блок-контактом замыкаются цепи катушки контактора К1 в том случае, если электродвигатель работал в режиме «вперед», и наоборот. Таким образом, привод осуществляет реверс, однако двигатель продолжает вращаться в прежнем направлении, работая в тормозном режиме противовключения.
Рис. 13.9. Схема автоматического управления асинхронным электродвигателем с фазным ротором.
Частота вращения ротора уменьшается, и как только частота вращения станет близкой к нулю, контакты реле контроля скорости разомкнут цепи катушек контакторов К1 или К2 и отключат статор двигателя от сети.

Управление двигателями с фазным ротором. Пуск, торможение и регулирование частоты вращения электродвигателей с фазным ротором сопряжены с изменением сопротивлений, включенных в роторную цепь. Сопротивления должны изменяться в определенной последовательности.
На рисунке 13.9 показана схема автоматического управления двигателем с фазным ротором при помощи командоконтроллера, резисторы могут быть использованы как пусковые и регулировочные.
Для подготовки к пуску двигателя рукоятку командоконтроплера устанавливают в нулевое положение. При этом получают питание реле напряжения К.1, которое, сработав, зашунтирует контакт контроллера, замыкающийся только в нулевом положении. В положении 1 режима «Вперед» оказывается под напряжением катушка контактора К2, который срабатывает и своими главными контактами подключает статор двигателя к сети при введенных полностью ступенях реостата. Одновременно срабатывает реле К4, которое посредством своего замыкающего контакта замкнет цепь контактора противовключения К5, а последний своими главными контактами выключит резисторы противовключения в роторе и подготовит цепь для питания катушки первого контактора ускорения Кб.

Для увеличения частоты вращения двигателя рукоятку командоконтроллера переводят в положение 2 «Вперед». Тогда выключится контактор Кб, шунтирующий первую ступень пускового резистора и с выдержкой времени подготавливающий цепь для питания контактора К7. При постановке рукоятки в следующие положения включаются последовательно контакторы К7 и К8, шунтирующие остальные ступени пускового реостата.
Реле времени, встроенные в контакторы К5, Кб, К7, обеспечивают минимальное время переключения пусковых сопротивлений, а увеличение времени пуска может быть достигнуто вручную медленным передвижением рукоятки контроллера. Аналогичным образом работает схема при перемещении рукоятки контроллера из нулевого положения в положения 1, 2, 3, 4 «Назад», только при этом будет включен контактор К3. Если оператор мгновенно переведет рукоятку из положения 4 «Вперед» в положение 4 «Назад», то вначале последовательно отключатся контакторы К8, К7, Кб, К5 ив цепь ротора будут введены все ступени реостата.
 Затем отключается контактор К.2 и после этого включится контактор КЗ. Так как рукоятка переведена мгновенно, скорость двигателя еще не успела упасть. Таким образом, статор двигателя, ротор которого вращается вперед, будет включен для работы назад, то есть двигатель будет переведен в режим противовключения. Так как ток противовключения превосходит пусковой ток, то реле К9 возбудившись, разомкнет свои контакты в цепи катушки контактора К5 и будет их держать раскрытыми до тех пор, пока ток в цепи ротора не станет равным пусковому. Это произойдет в момент, когда ротор двигателя остановится. Контактор К5, возбудившись, зашунтирует ступень противовключения реостата. Выключение остальных ступеней будет происходить с выдержками времени контакторов К5, Кб и К7 так же, как было при обычном пуске. Блокировочное реле К4 не позволяет в момент реверсирования включаться контактору К5. Пока реле К4 сработает, реле К9 успевает разомкнуть свои контакты.
Затем отключается контактор К.2 и после этого включится контактор КЗ. Так как рукоятка переведена мгновенно, скорость двигателя еще не успела упасть. Таким образом, статор двигателя, ротор которого вращается вперед, будет включен для работы назад, то есть двигатель будет переведен в режим противовключения. Так как ток противовключения превосходит пусковой ток, то реле К9 возбудившись, разомкнет свои контакты в цепи катушки контактора К5 и будет их держать раскрытыми до тех пор, пока ток в цепи ротора не станет равным пусковому. Это произойдет в момент, когда ротор двигателя остановится. Контактор К5, возбудившись, зашунтирует ступень противовключения реостата. Выключение остальных ступеней будет происходить с выдержками времени контакторов К5, Кб и К7 так же, как было при обычном пуске. Блокировочное реле К4 не позволяет в момент реверсирования включаться контактору К5. Пока реле К4 сработает, реле К9 успевает разомкнуть свои контакты. Наличие реле К1 препятствует повторному пуску двигателя, если рукоятка командоконтроллера не поставлена в нулевое положение.
Наличие реле К1 препятствует повторному пуску двигателя, если рукоятка командоконтроллера не поставлена в нулевое положение.- Назад
- Вперёд
- Назад
- Вперёд
- Вы здесь:
- Главная
- Архив
- Разное архив
- Электрооборудование и электроснабжение горных предприятий
Еще по теме:
- Защита сельских сетей от кз
- Электрические аппараты и оборудование выше 1000В
- Электрификация сельскохозяйственного производства
- В помощь сельскому электромонтеру
- Электромонтер строительной площадки
Лекция № 12 – Типовые узлы схем управления электроприводов
В электрооборудовании установок АПК используются типовые узлы схем управления электродвигателями.
На рис.5.1 представлена схема, применяемая при установочном (толчковом) режиме работы рабочей машины, когда кратковременное нажатие на кнопку SB обеспечивает небольшое перемещение (толчком) тому или иному движущемуся элементу машины. Данный принцип управления электродвигателем используется в подъемно-транспортных механизмах, металлорежущих станках и др.
Рис. 5.1. Схема включения двигателя, работающего в толчковом (установочном) режиме
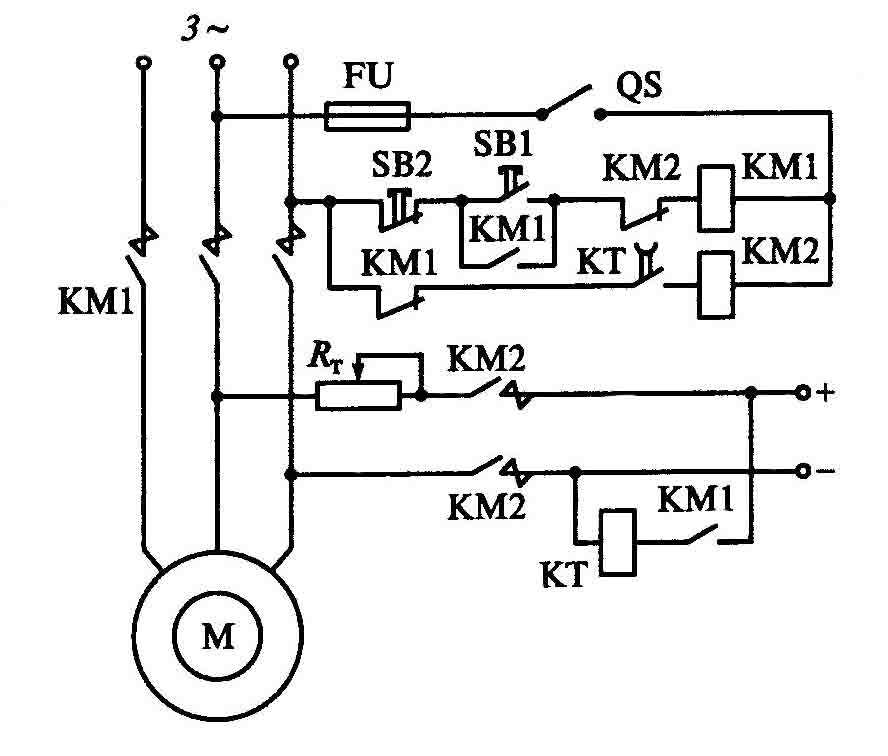
Часто возникает необходимость управления двигателем одним и тем же приводом в длительном и установочном режимах. Схема, обеспечивающая такое управление, показана на рис.5.2. При нажатии на кнопку SB3 включается пускатель КМ, который контактами КМ:1 запускает двигатель М. Двигатель работает в толчковом режиме аналогично схеме на рис. 5.1.
При нажатии кнопки SВ2 включается промежуточное реле КV, которое контактом КV:1 шунтирует кнопку SВ2, контактом КV:2 включается пускатель КМ и двигатель М начинает работать в длительном режиме.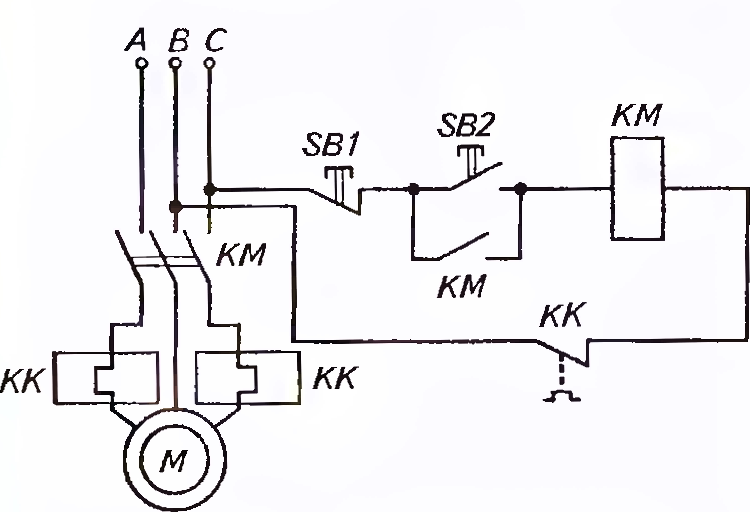 Для остановки двигателя необходимо нажать кнопку SВ1.
Для остановки двигателя необходимо нажать кнопку SВ1.
В электрических системах ряда установок встречаются схемы, позволяющие при помощи одной кнопки управлять несколькими электрическими цепями. В этом случае используют многоконтактное промежуточное реле. На рис. 5.3 представлена схема, в которой при нажатии на кнопку SB2 происходит включение контакторов КМ1 и КМ2 и т.д., следовательно, обеспечивается одновременный пуск двигателей М1 и М2. Для одновременной остановки двигателей служит кнопка SB1. Схема предусматривает также возможность раздельного включения и отключения каждого электродвигателя. Данный режим обеспечивается нажатием соответствующих кнопок SB3 и SB4, SB5 и SB6 и т.д. Совместное управление приводами применяют, например, для включения станочной линии, состоящей из нескольких станков. Раздельная работа приводов предусматривается для наладочных и ремонтных работ.
Рис. 5.2. Схема включения двигателя для работы в длительном и толчковом (установочном) режимах
Рис. 5.3. Схема одновременного включения нескольких электродвигателей
5.3. Схема одновременного включения нескольких электродвигателей
Для управления силовым электрооборудованием в электрических цепях используют разнообразные устройства дистанционного управления, защиты, телемеханики и автоматики, воздействующие на коммутационные аппараты его включения и отключения или регулирования.
На рис.5.4 приведена принципиальная схема управления асинхронным электродвигателем с короткозамкнутым ротором. Данная схема широко используется на практике при управлении приводами насосов, вентиляторов и многих других.
Перед началом работы включают автоматический выключатель QF. При нажатии кнопки SВ2 включается пускатель КМ и запускается двигатель М. Для остановки двигателя необходимо нажать кнопку SВ1, при этом отключаются пускатель КМ и двигатель М.
Рис.5.4. Схема включения асинхронного электродвигателя с короткозамкнутым ротором
При перегрузке электродвигателя М срабатывает электротепловое реле КК, размыкающее контакты КК:1 в цепи катушки КМ. Пускатель КМ отключается, двигатель М останавливается.
Пускатель КМ отключается, двигатель М останавливается.
В общем случае схемы управления могут осуществлять торможение электропривода, его реверсирование, изменять частоту вращения и т.д. В каждом конкретном случае используется своя схема управления.
В системах управления электроприводами широко используются блокировочные связи. Блокировкой обеспечивают фиксацию определенного состояния или положения рабочих органов устройства или элементов схемы. Блокировка обеспечивает надежность работы привода, безопасность обслуживания, необходимую последовательность включения или отключения отдельных механизмов, а также ограничение перемещения механизмов или исполнительных органов в пределах рабочей зоны.
Различают механическую и электрическую блокировки.
Примером простейшей электрической блокировки, применяемой практически во всех схемах управления, является блокировка кнопки «Пуск» SB2 (рис. 5.4.) контактом КМ2. Блокировка этим контактом позволяет после включения двигателя кнопку SB2 отпустить, не прерывая цепи питания катушки магнитного пускателя КМ, которое идет через блокировочный контакт КМ2.
В схемах реверсирования электродвигателей (при обеспечении движения механизмов вперед-назад, вверх-вниз и т.д.), а также при торможении применяются реверсивные магнитные пускатели. Реверсивный магнитный пускатель состоит из двух нереверсивных. При работе реверсивного пускателя необходимо исключить возможность их одновременно включения. Для этого в схемах предусматриваются и электрическая, и механическая блокировки (рис. 5.5). Если реверсирование двигателя выполняется двумя нереверсивными магнитными пускателями, то роль электрической блокировки играют контакты КМ1:3 и КМ2:3, а механическая блокировка обеспечивается кнопками SВ2 и SВ3, каждая из которых состоит из двух контактов, связанных между собой механически. При этом один из контактов-замыкающий, другой – размыкающий (механическая блокировка).
Схема работает следующим образом. Предположим что при включении пускателя КМ1 двигатель М вращается по часовой стрелке и против часовой – при включении КМ2. При нажатии кнопки SВ3 сначала размыкающий контакт кнопки разорвет цепь питания пускателя КМ2 и только потом замыкающий контакт SВ3 замкнет цепь катушки КМ1.
Рис.5.5. Механическая и электрическая блокировки при реверсировании привода
Пускатель КМ1 включается, запускается с вращением по часовой стрелке двигатель М. Контакт КМ1:3 размыкается, осуществляя электрическую блокировку, т.е. пока включен КМ1, цепь питания пускателя КМ2 разомкнута и его нельзя включить. Для осуществления реверса двигателя необходимо его остановить кнопкой SВ1, а затем, нажав кнопку SВ2, запустить в обратную сторону. При нажатии SВ2 сначала размыкающим контактом SВ2 разрывается цепь питания катушки КМ1 и далее замыкается цепь питания катушки КМ2 (механическая блокировка). Пускатель КМ2 включается и реверсирует двигатель М. Контакт КМ2:3, размыкаясь, осуществляет электрическую блокировку пускателя КМ1.
Чаще реверсирование двигателя выполняется одним реверсивным магнитным пускателем. Такой пускатель состоит из двух простых пускателей, подвижные части которых между собой связаны механически с помощью устройства в виде коромысла. Такое устройство называется механической блокировкой, не позволяющей силовым контактом одного пускателя КМ1 одновременно замыкаться силовым контактам другого пускателя КМ2 (рис. 5.6).
5.6).
Рис. 5.6. Механическая блокировка «коромыслом» подвижных частей двух пускателей единого реверсивного магнитного пускателя
Электрическая схема управления реверсом двигателя при помощи двух простейших пускателей единого реверсивного магнитного пускателя такая же, как и электрическая схема управления реверсом двигателя с использованием двух нереверсивных магнитных пускателей (рис. 5.5), с применением в электрической схеме таких же электрических и механических блокировок.
При автоматизации электроприводов поточных линий, конвейеров и т.п. применяется электрическая блокировка, которая обеспечивает пуск электродвигателей линии в определенной последовательности (рис. 5.7). При такой схеме, например, включение второго двигателя М2 (рис. 5.7) возможно только после включения первого двигателя М1, включение двигателя М3 – после включения М2. Такая очередность пуска обеспечивается блокировочными контактами КМ1:3 и КМ2:3.
Рис.5.7. Схема последовательного включения двигателей
Пример 5. 1. Используя электрическую схему (рис. 5.4) управления асинхронным электродвигателем с короткозамкнутым ротором, необходимо включить в эту схему дополнительные контакты, обеспечивающие автоматическую остановку электродвигателя рабочего механизма в одной и в двух заданных точках.
1. Используя электрическую схему (рис. 5.4) управления асинхронным электродвигателем с короткозамкнутым ротором, необходимо включить в эту схему дополнительные контакты, обеспечивающие автоматическую остановку электродвигателя рабочего механизма в одной и в двух заданных точках.
Решение. Требование задачи обеспечить остановку электродвигателя в одной заданной точке может быть выполнено путевым выключателем SQ1 с нормально закрытым контактом, установленным последовательно с блок-контактом KM2, шунтирующим кнопку SB2. Для остановки электродвигателя рабочего механизма в двух заданных точках последовательно с контактом путевого выключателя SQ1 размещают контакт второго путевого выключателя SQ2. На рис. 5.8 приведены электрические схемы остановки электродвигателя в одной и в двух заданных точках. После пуска двигателя механизм приходит в движение и при достижении места остановки нажимает на путевой выключатель, например SQ1, и электродвигатель останавливается. После выполнения необходимой технологической операции вновь нажимаем на кнопку SB2, и механизм продолжает движение до следующего путевого выключателя SQ2, где технологическая операция заканчивается.
Рис. 5.8 К примеру 5.1
Пример 5.2. В электрическую схему (рис. 5.5) управления реверсом короткозамкнутого асинхронного двигателя с помощью блокировочных связей следует ввести элементы световой сигнализации для контроля направления вращения двигателя.
Решение. Схема световой сигнализации контроля направления вращения двигателя при реверсе, совмещённая со схемой управления реверсом двигателя, приведена на рис. 5.9. При вращении двигателя, например вправо, горит лампа HL1, включаемая контактом KM1.4 магнитного пускателя KM1, при этом лампа HL2 погашена, т.к. магнитный пускатель KM2 не включён. При вращении двигателя влево горит лампа HL2, включённая контактом KM2.4 магнитного пускателя KM2. Таким образом, лампа HL1 сигнализирует о вращении двигателя вправо, а лампа HL2 – о вращении двигателя влево. В результате блокировочными связями световая сигнализация обеспечивает контроль над направлением вращения двигателя при реверсе.
Рис. 5.9 К примеру 5.2
5.9 К примеру 5.2
Двигатели и схемы управления двигателем
Об этом курсе
25 098 недавних просмотров
Этот курс также может быть принят для получения академического кредита как ECEA 5341, часть степени магистра наук в области электротехники CU Boulder.
Гибкие сроки ● Внедрите двигатель и сопутствующий датчик вращения в схему управления двигателем как аппаратно, так и программно.
● Добавьте двигатель и схему управления двигателем в набор для разработки на основе микропроцессора.
● Создать аппаратное и микропрограммное обеспечение для обработки данных обратной связи двигателя в микропроцессоре для дальнейшей оценки.
Вам нужно будет купить следующие компоненты, чтобы выполнить два курсовых проекта на основе видео в этом модуле. Обратите внимание: если вы уже приобрели КОМПЛЕКТ ДЛЯ ПРОТОТИПИРОВАНИЯ PSOC 5LP, вам не нужно покупать его снова.
Эти детали можно приобрести на веб-сайте Digikey, www. Digikey.com. Или вы можете получить спецификации с сайта и приобрести их в другом месте.
Это номера деталей для приведенной выше таблицы, лабораторной работы по измерению напряжения и тока двигателя. Вы можете скопировать и вставить их в поисковую систему на сайте Digikey. Вам понадобится по одной батарее каждого типа, кроме батареек AA (N107-ND), которых вам потребуется 3.
● Внедрите двигатель и сопутствующий датчик вращения в схему управления двигателем как аппаратно, так и программно.
● Добавьте двигатель и схему управления двигателем в набор для разработки на основе микропроцессора.
● Создать аппаратное и микропрограммное обеспечение для обработки данных обратной связи двигателя в микропроцессоре для дальнейшей оценки.
Вам нужно будет купить следующие компоненты, чтобы выполнить два курсовых проекта на основе видео в этом модуле. Обратите внимание: если вы уже приобрели КОМПЛЕКТ ДЛЯ ПРОТОТИПИРОВАНИЯ PSOC 5LP, вам не нужно покупать его снова.
Эти детали можно приобрести на веб-сайте Digikey, www. Digikey.com. Или вы можете получить спецификации с сайта и приобрести их в другом месте.
Это номера деталей для приведенной выше таблицы, лабораторной работы по измерению напряжения и тока двигателя. Вы можете скопировать и вставить их в поисковую систему на сайте Digikey. Вам понадобится по одной батарее каждого типа, кроме батареек AA (N107-ND), которых вам потребуется 3. 428-3390-НД
P14355-НД
ФКУ13Н10ЛТУ-НД
N107-НД
1Н5393-Э3/54ГИКТ-НД
RNF14FTD1K00CT-ND
П0.62В-1БК-НД
Необходимое дополнительное оборудование:
• Проволока – разного сечения и длины
• Макет
• Осциллограф – предлагаемые модели:
o PICOSCOPE 2204A-D2 доступен на сайте www.digikey.com или
о Диджилент 410-324 | OpenScope MZ доступен на сайте www.newark.com
В зависимости от вашего бюджета вы также можете изучить следующие модели:
o Hantek HT6022BE20MHz — https://www.amazon.com/dp/B009h5AYII
o SainSmart DSO212 — https://www.amazon.com/dp/B074QBQNB7
o PoScope Mega50 USB — https://www.robotshop.com/en/poscope-mega50-usb-mso-oscilloscope.html
o ADALM2000 — https://www.digikey.com/en/products/detail/analog-devices-inc./ADALM2000/7019661
428-3390-НД
P14355-НД
ФКУ13Н10ЛТУ-НД
N107-НД
1Н5393-Э3/54ГИКТ-НД
RNF14FTD1K00CT-ND
П0.62В-1БК-НД
Необходимое дополнительное оборудование:
• Проволока – разного сечения и длины
• Макет
• Осциллограф – предлагаемые модели:
o PICOSCOPE 2204A-D2 доступен на сайте www.digikey.com или
о Диджилент 410-324 | OpenScope MZ доступен на сайте www.newark.com
В зависимости от вашего бюджета вы также можете изучить следующие модели:
o Hantek HT6022BE20MHz — https://www.amazon.com/dp/B009h5AYII
o SainSmart DSO212 — https://www.amazon.com/dp/B074QBQNB7
o PoScope Mega50 USB — https://www.robotshop.com/en/poscope-mega50-usb-mso-oscilloscope.html
o ADALM2000 — https://www.digikey.com/en/products/detail/analog-devices-inc./ADALM2000/7019661Гибкие сроки
Сброс сроков в соответствии с вашим графиком.
Общий сертификатОбщий сертификат
Получите сертификат по завершении
100% онлайн100% онлайн
Начните сразу и учитесь по собственному графику.
Coursera LabsCoursera Labs
Включает практические учебные проекты.
Курс 2 из 4 в
Специализация «Встраивание датчиков и двигателей»
Средний уровеньСредний уровень
Часов на выполнениеПрибл. 36 часов на выполнение
Доступные языкиАнглийский
Субтитры: арабский, французский, португальский (европейский), итальянский, вьетнамский, немецкий, русский, английский, испанский
Гибкие срокиГибкие сроки
Сбрасывайте сроки в соответствии с вашим графиком.
Общий сертификатОбщий сертификат
Получение сертификата по завершении
100 % онлайн100 % онлайн
Начните сразу и учитесь по собственному расписанию.
Coursera LabsCoursera Labs
Включает практические учебные проекты.
Узнайте больше о Coursera Labs Внешняя ссылкаСпециализацияКурс 2 из 4 специализации
«Встраивание датчиков и моторов»
Средний уровеньСредний уровень
Часов на прохождениеПрибл. 36 часов
Доступные языкиАнглийский
Субтитры: арабский, французский, португальский (европейский), итальянский, вьетнамский, немецкий, русский, английский, испанский
Instructors
Jay Mendelson
Instructor
Electrical, Computer & Energy Engineering
79,971 Learners
5 Courses
James Zweighaft
Instructor
Electrical, Computer & Energy Engineering
79,662 Учащиеся
4 Курсы
Предлагает
University of Colorado Boulder
CU-Boulder — динамичное сообщество ученых и учащихся в одном из самых живописных университетских городков страны. Являясь одним из 34 государственных учреждений США, входящих в престижную Ассоциацию американских университетов (AAU), мы гордимся традициями академического превосходства, в котором пять лауреатов Нобелевской премии и более 50 членов престижных академических академий.
Являясь одним из 34 государственных учреждений США, входящих в престижную Ассоциацию американских университетов (AAU), мы гордимся традициями академического превосходства, в котором пять лауреатов Нобелевской премии и более 50 членов престижных академических академий.
Начните работать над получением степени магистра
Этот курс является частью 100% онлайн-курса магистра наук в области электротехники Университета Колорадо в Боулдере. Если вы допущены к полной программе, ваши курсы засчитываются для получения степени.
Учить больше
Обзоры
4,7
Заполненные звезды, заполненные звездой, заполненной звездой звезды,362 Обзоры
5 Звезд
74,27%
46005 9000 21,47570757575759759759757575750759759759759759759759759759759759759759750759759707.97597570975709757097507. %
2 Звезды
0,75%
1 Звезда
0,91%
Top Reviews от двигателей и моторных цепей.
 0004 от MB 20 ноября 2022 г.
0004 от MB 20 ноября 2022 г.Проведение лекций инструктором было потрясающим
Рекомендуется для инженеров-электриков, которые хотят повысить свои знания о различных типах двигателей и лекции дают то, что обещано: о двигателях переменного и постоянного тока.
Если вы хотите узнать больше об этом предмете, это один из лучших онлайн-курсов, которые вы можете найти.
Приятного обучения!
Filled StarFilled StarFilled StarFilled StarStarby TSJun 6, 2020
Этот курс представлял собой полный пакет информации о двигателях и их контроллерах, а также об измерениях различных параметров.
Filled StarFilled StarFilled StarFilled StarFilled Starот RRA10 апреля 2020 г.
Курс дал мне краткое представление о том, как выбрать двигатель для моего приложения. Видеоролики по применению в реальном времени и лабораторные упражнения, которые действительно расширяют знания о двигателях переменного и постоянного тока.
Просмотреть все отзывы
О специализации «Встраивание датчиков и двигателей»
Курсы по этой специализации также могут быть приняты для академического кредита как ECEA 5340-5343, часть степени магистра наук CU Boulder в области электротехники.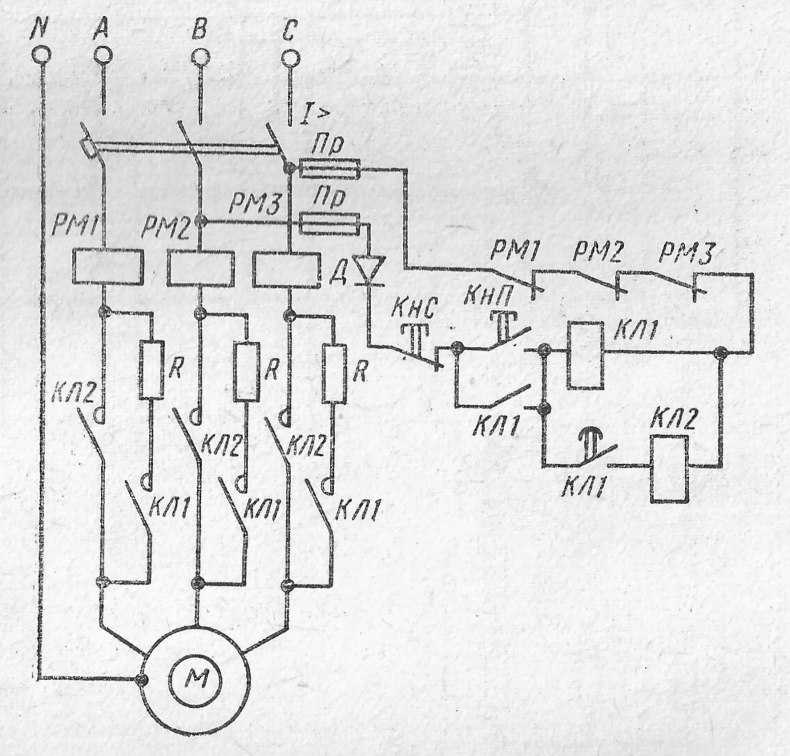 Зарегистрируйтесь здесь.
Зарегистрируйтесь здесь.
Часто задаваемые вопросы
Еще вопросы? Посетите Справочный центр для учащихся.
Джонс о цепях управления шаговым двигателем
Джонс о цепях управления шаговым двигателем Часть
Шаговые двигатели |
- Введение
- Двигатели с переменным сопротивлением
- Униполярные двигатели с постоянными магнитами и гибридные двигатели
- Практические драйверы с униполярным и переменным магнитным сопротивлением
- Биполярные моторы и Н-образные мосты
- Практические схемы биполярного привода
Этот раздел учебника по степперу посвящен основному заключительному этапу. схемы управления шаговыми двигателями. Эта схема сосредоточена на одном
проблема, включение и выключение тока в каждой обмотке двигателя и управление
его направление. Схема, обсуждаемая в этом разделе, подключается напрямую
к обмоткам двигателя и источнику питания двигателя, и эта схема
управляется цифровой системой, которая определяет, когда переключатели повернуты
включено или выключено.
схемы управления шаговыми двигателями. Эта схема сосредоточена на одном
проблема, включение и выключение тока в каждой обмотке двигателя и управление
его направление. Схема, обсуждаемая в этом разделе, подключается напрямую
к обмоткам двигателя и источнику питания двигателя, и эта схема
управляется цифровой системой, которая определяет, когда переключатели повернуты
включено или выключено.
В этом разделе рассматриваются все типы двигателей, начиная с элементарной схемы, необходимой для управления двигателем с переменным сопротивлением, к схеме Н-моста, необходимой для управлять биполярным двигателем с постоянными магнитами. Каждый класс схемы привода проиллюстрированы практическими примерами, но эти примеры не предназначены для исчерпывающий каталог коммерчески доступных схем управления, а также информация, представленная здесь, предназначена для замены информации, найденной в паспортах компонентов производителя для упомянутых деталей.
В этом разделе рассматриваются только самые элементарные схемы управления для каждого
класс мотора. Все эти схемы предполагают, что питание двигателя
обеспечивает напряжение привода не выше номинального напряжения двигателя, и это
существенно ограничивает двигательную активность. Следующий раздел, посвященный текущим ограниченным
схема привода, охватывает практические высокопроизводительные схемы привода.
Все эти схемы предполагают, что питание двигателя
обеспечивает напряжение привода не выше номинального напряжения двигателя, и это
существенно ограничивает двигательную активность. Следующий раздел, посвященный текущим ограниченным
схема привода, охватывает практические высокопроизводительные схемы привода.
Типовые контроллеры для шаговых двигателей с переменным сопротивлением являются вариациями контура, показанного на рис. 3.1:
Рисунок 3.1На рис. 3.1 прямоугольники используются для обозначения переключателей; контроль блок, не показанный, отвечает за подачу управляющих сигналов на открытие и замкните выключатели в соответствующее время, чтобы раскрутить моторы. Во многих случаях блоком управления будет компьютер или программируемый интерфейс. контроллер с программным обеспечением, непосредственно генерирующим выходные данные, необходимые для управления переключатели, но в других случаях вводится дополнительная схема управления, иногда безвозмездно!
Обмотки двигателя, соленоиды и подобные устройства являются индуктивными нагрузками. Как
таким образом, ток через обмотку двигателя не может быть включен или выключен
мгновенно без привлечения бесконечных напряжений! Когда переключатель
управляющая обмотка двигателя замкнута, позволяя току течь, результат
это медленное нарастание тока. Когда переключатель, управляющий двигателем
обмотка разомкнута, результатом этого является всплеск напряжения, который может серьезно
повредить переключатель, если не принять меры по обращению с ним должным образом.
Как
таким образом, ток через обмотку двигателя не может быть включен или выключен
мгновенно без привлечения бесконечных напряжений! Когда переключатель
управляющая обмотка двигателя замкнута, позволяя току течь, результат
это медленное нарастание тока. Когда переключатель, управляющий двигателем
обмотка разомкнута, результатом этого является всплеск напряжения, который может серьезно
повредить переключатель, если не принять меры по обращению с ним должным образом.
Есть два основных способа справиться с этим скачком напряжения. Один из них шунтировать обмотку двигателя диодом, а другой шунтировать двигатель обмотка с конденсатором. Рисунок 3.2 иллюстрирует оба подхода:
Рисунок 3.2Диод, показанный на рис. 3.2, должен выдерживать полный ток. через обмотку двигателя, но он будет проводить только кратковременно каждый раз, когда выключатель выключается, так как ток через обмотку затухает. Если относительно медленные диоды, такие как обычное семейство 1N400X, используются вместе с быстрым переключателем может потребоваться добавить небольшой конденсатор в параллельно диоду.

Конденсатор, показанный на рис. 3.2, имеет более сложную конструкцию! Когда переключатель замкнут, конденсатор разряжается через переключатель на землю, и коммутатор должен быть в состоянии справиться с этим кратким всплеском разрядный ток. Резистор последовательно с конденсатором или последовательно с блоком питания будет ограничивать этот ток. Когда переключатель открыт, накопленная энергия в обмотке двигателя зарядит конденсатор до напряжение значительно выше напряжения питания, и переключатель должен быть способен выдержать это напряжение. Чтобы определить размер конденсатора, приравняем две формулы запасенной энергии в резонансном контуре:
Р = С В 2 / 2Где:
P = L I 2 / 2
P — накопленная энергия в ватт-секундах или кулон-вольтахРешение для минимального размера конденсатора, необходимого для предотвращения перенапряжения на коммутаторе довольно легко:
C — емкость, в фарадах
В — напряжение на конденсаторе
L — индуктивность обмотки двигателя, в генри
I — ток через обмотку двигателя
C > L I 2 / ( В б – В с ) 2Где:
В б — напряжение пробоя выключателяДвигатели с переменным сопротивлением имеют переменную индуктивность, которая зависит от угол вала.
В с — напряжение питания
 Поэтому для выбора нужно использовать схему наихудшего случая.
конденсатор. Кроме того, индуктивность двигателя часто плохо документируется.
если вообще.
Поэтому для выбора нужно использовать схему наихудшего случая.
конденсатор. Кроме того, индуктивность двигателя часто плохо документируется.
если вообще.Конденсатор и обмотка двигателя вместе образуют резонансный контур. Если система управления управляет двигателем на частотах, близких к резонансным частота этой цепи, ток двигателя через обмотки двигателя, и, следовательно, крутящий момент, создаваемый двигателем, будет совсем другим от установившегося крутящего момента при номинальном рабочем напряжении! Резонансный частота:
ф = 1 / ( 2π ( л С ) 0,5 )Опять же, электрическая резонансная частота для двигателя с переменным сопротивлением будет зависеть от угла вала! Когда работают двигатели с переменным сопротивлением с возбуждающими импульсами, близкими к резонансу, колебательный ток в обмотка двигателя приведет к магнитному полю, которое удваивается до нуля резонансной частоты, и это может сильно снизить доступный крутящий момент!
Типовые контроллеры для униполярных шаговых двигателей
являются вариациями контура, показанного на рис. 3.3:
3.3:
Рисунок 3.3На рис. 3.3, как и на рис. 3.1, прямоугольники используются для представления переключателей; блок управления, не показанный, отвечает за подачу управляющих сигналов открывать и закрывать переключатели в нужное время, чтобы вращаться моторы. Блок управления обычно представляет собой компьютер или программируемый контроллер интерфейса с программным обеспечением, непосредственно генерирующим необходимые выходные данные для управления переключателями.
Как и в случае со схемой привода для двигателей с переменным сопротивлением, мы должны иметь дело с индуктивный толчок, возникающий при выключении каждого из этих переключателей. Опять же, мы можем шунтировать индуктивный удар с помощью диодов, но теперь 4 диода требуются, как показано на рисунке 3.4:
Рисунок 3.4Дополнительные диоды необходимы, потому что обмотка двигателя не является двумя независимыми. катушки индуктивности, это одна катушка индуктивности с центральным отводом с центральным выводом на фиксированное напряжение.
 Это действует как автотрансформатор! Когда один конец двигателя
обмотка опущена, другой конец взлетит вверх, и наоборот. Когда
переключатель размыкается, индуктивная отдача приводит в действие этот конец обмотки двигателя.
к плюсу питания, где он зажат диодом. Противоположный конец
полетит вниз, и если бы он не плавал при напряжении питания на
время, он упадет под землю, инвертируя напряжение на переключателе в
что конец. Некоторые переключатели невосприимчивы к таким реверсам, но другие могут быть
серьезно поврежден.
Это действует как автотрансформатор! Когда один конец двигателя
обмотка опущена, другой конец взлетит вверх, и наоборот. Когда
переключатель размыкается, индуктивная отдача приводит в действие этот конец обмотки двигателя.
к плюсу питания, где он зажат диодом. Противоположный конец
полетит вниз, и если бы он не плавал при напряжении питания на
время, он упадет под землю, инвертируя напряжение на переключателе в
что конец. Некоторые переключатели невосприимчивы к таким реверсам, но другие могут быть
серьезно поврежден.Конденсатор также можно использовать для ограничения напряжения отдачи, как показано на рис. Рисунок 3.5:
Рисунок 3.5Правила выбора конденсатора, показанные на рис. 3.5, такие же, как и для правила выбора конденсатора, показанные на рис. 3.2, но влияние резонанс совсем другой! С двигателем с постоянными магнитами, если конденсатор вращается на резонансной частоте или около нее, крутящий момент увеличится до вдвое больше крутящего момента на низких оборотах! Результирующая кривая зависимости крутящего момента от скорости может быть довольно сложным, как показано на рис.
 3.6:
3.6:Рисунок 3.6На рис. 3.6 показан пик располагаемого крутящего момента при электрическом резонансе. частоте и долине на механической резонансной частоте. Если электрическая резонансная частота помещается соответственно выше того, что было бы была скорость отсечки для двигателя с использованием драйвера на основе диода, эффект может значительно увеличить эффективную скорость отсечки.
Механическая резонансная частота зависит от крутящего момента, поэтому, если механическая резонансная частота близка к электрическому резонансу, он будет сдвинут электрическим резонансом! Кроме того, ширина механического резонанса зависит от локального наклона кривая зависимости крутящего момента от скорости; если крутящий момент падает со скоростью, механический резонанс будет острее, а если крутящий момент будет расти с увеличением скорости, то быть более широким или даже разделенным на несколько резонансных частот.
В приведенных выше схемах детали необходимых переключателей были
намеренно игнорируется. Любая коммутационная техника, от тумблеров до
силовые МОП-транзисторы будут работать! Рисунок 3.7 содержит некоторые предложения по
реализация каждого переключателя с обмоткой двигателя и защитным диодом
включено для целей ориентации:
Любая коммутационная техника, от тумблеров до
силовые МОП-транзисторы будут работать! Рисунок 3.7 содержит некоторые предложения по
реализация каждого переключателя с обмоткой двигателя и защитным диодом
включено для целей ориентации:
Рисунок 3.7Каждый из переключателей, показанных на рис. 3.7, совместим с входом TTL. Источник питания 5 вольт, используемый для логики, включая 7407 с открытым коллектором. Драйвер, используемый на рисунке, должен быть хорошо отрегулирован. Мощность двигателя, обычно от 5 до 24 вольт, требует минимальной регулировки. Это Стоит отметить, что эти силовые схемы переключения подходят для соленоидов, двигателей постоянного тока и других индуктивных нагрузок, а также для управления шаговые двигатели.
Транзистор SK3180, показанный на рис. 3.7, представляет собой силовой дарлингтон с
текущий прирост свыше 1000; таким образом, 10 мА, протекающие через 470 Ом
резистора смещения более чем достаточно, чтобы транзистор мог переключаться на несколько
ток через обмотку двигателя. Буфер 7407, используемый для управления
Дарлингтон можно заменить любой высоковольтной микросхемой с открытым коллектором, которая
может поглотить по крайней мере 10 миллиампер. В случае выхода из строя транзистора
высоковольтный драйвер с открытым коллектором служит для защиты
остальная часть логической схемы от источника питания двигателя.
Буфер 7407, используемый для управления
Дарлингтон можно заменить любой высоковольтной микросхемой с открытым коллектором, которая
может поглотить по крайней мере 10 миллиампер. В случае выхода из строя транзистора
высоковольтный драйвер с открытым коллектором служит для защиты
остальная часть логической схемы от источника питания двигателя.
IRC IRL540, показанный на рис. 3.7, представляет собой силовой полевой транзистор.
Это может выдерживать токи до 20 ампер и ломается.
неразрушающий при 100 вольт; в результате этот чип может поглощать индуктивное
шипы без защитных диодов, если он подключен к достаточно большому накалу
раковина. У этого транзистора очень быстрое время переключения, поэтому защита
диоды должны быть сравнительно быстродействующими или зашунтированы небольшими конденсаторами. Это
особенно важно с диодами, используемыми для защиты транзистора
против обратного смещения! В случае выхода из строя транзистора стабилитрон
диод и резистор 100 Ом защищают схему ТТЛ. Резистор 100 Ом
также несколько замедляет время переключения транзистора.
Для приложений, где каждая обмотка двигателя потребляет менее 500 миллиампер, в ULN200x семейство массивов Дарлингтона из Аллегро Микросистемс, также доступен как DS200x от National Semiconductor и как Массив Дарлингтона Motorola MC1413 будет управлять несколько обмоток двигателя или другие индуктивные нагрузки непосредственно с логических входов. На рис. 3.8 показана разводка контактов широко доступного чипа ULN2003, массива из 7 транзисторов Дарлингтона с TTL-совместимыми входами:
Рисунок 3.8Базовый резистор на каждом транзисторе Дарлингтона соответствует стандарту. биполярные ТТЛ выходы. Каждый дарлингтон NPN подключен к своему эмиттеру. подключен к контакту 8, предназначенному для заземления, каждый транзистор в этом корпусе защищен двумя диодами, один закорачивающий эмиттер к коллектору, защищая от обратного напряжения на транзистор, и один, соединяющий коллектор с выводом 9; если контакт 9 подключен к плюсу двигателя, этот диод защитит транзистор от индуктивные шипы.

Микросхема ULN2803 по сути такая же, как описанная микросхема ULN2003. выше, за исключением того, что он находится в 18-контактном корпусе и содержит 8 дарлингтонов, позволяет использовать один чип для управления парой обычных однополярных двигатели с постоянными магнитами или с переменным сопротивлением.
Для двигателей с током менее 600 мА на обмотку УДН2547Б Quad Power Driver производства Аллегро Микросистемс будет обрабатывать все 4 обмотки общего униполярного шаговые двигатели. Для двигателей с током менее 300 мА на обмотку: Texas Instruments SN7541, 7542 и 7543 с двойным питанием водители – хороший выбор; обе эти альтернативы включают некоторую логику с силовыми драйверами.
С биполярными шаговыми двигателями с постоянными магнитами все сложнее.
потому что у них нет центральных отводов на их обмотках. Поэтому, чтобы обратить
направление поля, создаваемого обмоткой двигателя, нам нужно изменить на противоположное
ток через обмотку. Мы могли бы использовать двойной бросок с двойным полюсом
переключатель, чтобы сделать это электромеханически; электронный эквивалент такого
коммутатор называется H-мостом и показан на рис.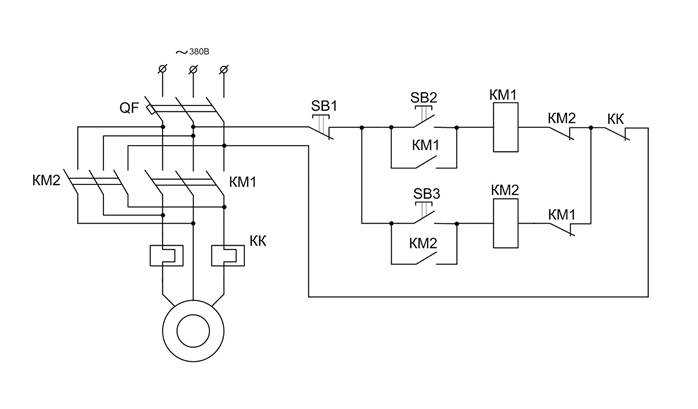 3.9:
3.9:
Рисунок 3.9Как и в униполярных приводных схемах, которые обсуждались ранее, используемые переключатели в H-мосте должны быть защищены от скачков напряжения, вызванных поворотом пропадание питания в обмотке двигателя. Обычно это делается с помощью диодов, как показано на рисунке. на рисунке 3.9.
Стоит отметить, что Н-мосты применимы не только для управления биполярные шаговые двигатели, но и для управления двигателями постоянного тока, двухтактные соленоиды (с плунжерами на постоянных магнитах) и многие другие применения.
С 4 переключателями базовый H-мост предлагает 16 возможных режимов работы, 7 из которых коротит по питанию! Следующее Интересуют режимы работы:
- Прямой режим , переключатели A и D замкнуты.
- Реверсивный режим , переключатели B и C замкнуты.
- Это обычные рабочие режимы, позволяющие току течь от
питания, через обмотку двигателя и далее на землю.
Рисунок 3.10 иллюстрирует прямой режим:
Рисунок 3.
 10
10 - Режим быстрого затухания или режим выбега , все переключатели разомкнуты.
- Любой ток, протекающий через обмотку двигателя, будет работать против
полное напряжение питания плюс два падения диода, поэтому ток будет затухать
быстро. Этот режим практически не оказывает динамического тормозного эффекта на
ротор двигателя, так что ротор будет свободно вращаться по инерции, если все обмотки двигателя
питается в этом режиме.
На рис. 3.11 показано течение тока сразу после переключения с
прямой режим работы в режим быстрого затухания.
Рисунок 3.11
- Режимы медленного затухания или режимы динамического торможения .
- В этих режимах возможна рециркуляция тока по обмотке двигателя
с минимальным сопротивлением. В результате, если ток течет в двигателе
обмотка при входе в один из этих режимов ток будет медленно затухать,
и если ротор двигателя вращается, он индуцирует ток, который будет действовать
как тормоз ротора.
 На рис. 3.12 показан один из многих полезных
режимы медленного затухания при замкнутом переключателе D; если обмотка двигателя недавно
находился в режиме прямого хода, состояние переключателя B может быть либо разомкнуто, либо
закрыто:
На рис. 3.12 показан один из многих полезных
режимы медленного затухания при замкнутом переключателе D; если обмотка двигателя недавно
находился в режиме прямого хода, состояние переключателя B может быть либо разомкнуто, либо
закрыто:Рисунок 3.12
Рисунок 3.13Здесь доступны следующие режимы работы:
Преимущество такой компоновки в том, что все полезные режимы работы сохраняются и кодируются минимальным количеством битов; последний важно при использовании микроконтроллера или компьютерной системы для управления H-мост, потому что многие такие системы имеют только ограниченное количество доступных битов.
XY ABCD Режим 00 0000 быстрый распад 01 1001 вперед 10 0110 реверс 11 0101 медленный распад
 для параллельного вывода. К сожалению, немногие из интегрированных чипов H-моста на
рынке есть такая простая схема управления.
для параллельного вывода. К сожалению, немногие из интегрированных чипов H-моста на
рынке есть такая простая схема управления.На рынке имеется ряд встроенных драйверов Н-моста, но по-прежнему полезно взглянуть на реализацию дискретных компонентов для понимания как работает Н-мост. Антонио Рапозо ([email protected]) предложил схему H-моста, показанную на рис. 3.14;
Рисунок 3.14Входы X и Y этой схемы могут управляться открытым коллектором. Выходы TTL, как в схеме униполярного возбуждения на основе Дарлингтона. на рисунке 3.7. Обмотка двигателя будет находиться под напряжением, если ровно один из входы X и Y высокие, и ровно один из них низкий. Если оба низкий уровень, оба понижающих транзистора будут выключены. Если оба имеют высокий уровень, оба подтягивающих транзистора будут выключены. В результате эта простая схема переводит двигатель в режим динамического торможения. как в состоянии 11, так и в состоянии 00, и не предлагает режим движения по инерции.

Схема на рис. 3.14 состоит из двух одинаковых половинок, каждая из которых может быть правильно описан как двухтактный драйвер. Термин половинный H-мост иногда применяется к этим схемам! Также стоит отметить, что полуH-мост имеет схему, очень похожую на схему выходного привода используется в логике TTL. Фактически, линейные драйверы TTL с тремя состояниями, такие как 74LS125A, а 74LS244 можно использовать как полуH-мост для небольших нагрузок, как показано на рисунке. на рисунке 3.15:
Рисунок 3.15Эта схема эффективна для управления двигателями сопротивлением до 50 Ом на обмотки при напряжении примерно до 4,5 вольт с использованием источника питания 5 вольт. Каждый буфер с тремя состояниями в LS244 может потреблять примерно в два раза больше тока, чем он может быть источником, а внутреннее сопротивление буферов достаточно, когда источник тока, чтобы равномерно разделить ток между драйверами, которые выполняются параллельно. Этот моторный привод допускает все полезные состояния достигается драйвером на рис.
 3.13, но эти состояния не кодируются как
эффективно:
3.13, но эти состояния не кодируются как
эффективно:Второй режим динамического торможения, XYE=110, обеспечивает несколько более слабое торможение. эффект, чем первый из-за того, что драйверы LS244 могут больше просадить ток, чем они могут получить.
XYE Режим –1 быстрый распад 000 более медленное затухание 010 вперед 100 реверс 110 медленный распад
Микрочип (ранее Telcom Semiconductor)
TC4467
Драйвер Quad CMOS — еще один пример драйвера общего назначения.
которые можно использовать как 4 независимых полупроводниковых моста. В отличие от предыдущих драйверов,
техпаспорт этого драйвера даже предлагает использовать его для управления двигателем
приложений, с напряжением питания до 18 вольт и
до 250 миллиампер на обмотку двигателя.
В отличие от предыдущих драйверов,
техпаспорт этого драйвера даже предлагает использовать его для управления двигателем
приложений, с напряжением питания до 18 вольт и
до 250 миллиампер на обмотку двигателя.
Одна из проблем с серийно выпускаемым управлением шаговым двигателем чипов заключается в том, что многие из них имеют относительно короткий срок жизни на рынке. Для например, серия микросхем Seagate IPxMxx с двойным H-мостом (от IP1M10 до IP3M12) были очень хорошо продуманы, но, к сожалению, оказалось, что Seagate делала их только тогда, когда они использовали шаговые двигатели для позиционирования головы. в дисководах Seagate. Тошиба ТА7279двойной драйвер H-моста будет еще один отличный выбор для двигателей до 1 ампера, но опять же, это судя по всему, сделано только для внутреннего пользования.
SGS-Томпсон
(и другие)
L293
двойной H-мост – близкий конкурент
для вышеперечисленных микросхем, но в отличие от них не содержит защитных диодов.
L293D
Чип, представленный позже, совместим по выводам и включает в себя эти диоды. Если используется более ранняя версия L293, каждая обмотка двигателя должна быть подключена через перемычку.
выпрямитель (аналог 1N4001). Использование внешних диодов позволяет
резистор, который нужно поместить в текущий путь рециркуляции, чтобы ускорить распад
ток в обмотке двигателя при его выключении; это может быть желательно
в некоторых приложениях. L29Семейство 3 предлагает отличный выбор для вождения
небольшие биполярные шаговые двигатели, потребляющие до одного ампера на обмотку двигателя при напряжении до 36
вольт. На рис. 3.16 показана общая для микросхем L293B и L293D разводка выводов:
Если используется более ранняя версия L293, каждая обмотка двигателя должна быть подключена через перемычку.
выпрямитель (аналог 1N4001). Использование внешних диодов позволяет
резистор, который нужно поместить в текущий путь рециркуляции, чтобы ускорить распад
ток в обмотке двигателя при его выключении; это может быть желательно
в некоторых приложениях. L29Семейство 3 предлагает отличный выбор для вождения
небольшие биполярные шаговые двигатели, потребляющие до одного ампера на обмотку двигателя при напряжении до 36
вольт. На рис. 3.16 показана общая для микросхем L293B и L293D разводка выводов:
Рисунок 3.16Этот чип можно рассматривать как 4 независимых полупроводниковых моста, включенных попарно. или как два полных Н-моста. Это силовой DIP-пакет с контактами 4, 5, 12. и 13 предназначены для отвода тепла к печатной плате или внешнему радиатору.
SGS-Томпсон
(и другие)
L298
двойной H-мост очень похож на
выше, но способен выдерживать до 2 ампер на канал и упакован как
силовой компонент; как и в случае с LS244, безопасно подключать два H-моста.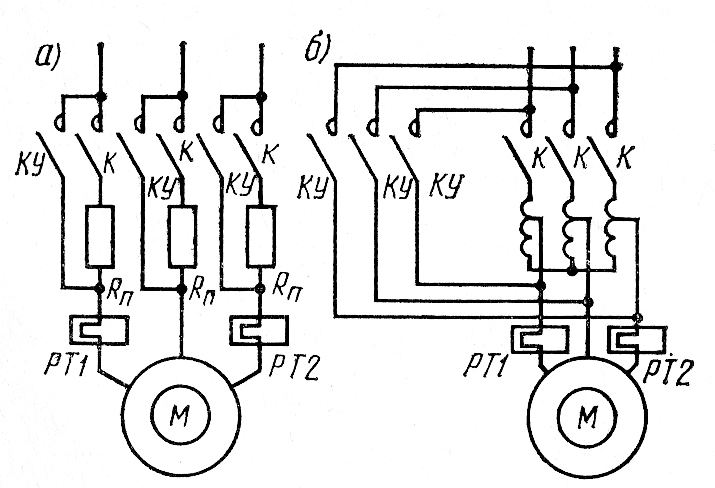 в корпусе L298 в один 4-амперный H-мост (в паспорте на эту микросхему
дает конкретные советы о том, как это сделать). Одно предупреждение уместно
относительно L298; этот чип очень быстро переключается, достаточно быстро, чтобы
банальные защитные диоды (эквивалент 1N400X) не работают. Вместо,
используйте диод, такой как BYV27. Национальный полупроводник LMD18200
H-мост — еще один хороший пример; это обрабатывает до 3 ампер и имеет встроенный
защитные диоды.
в корпусе L298 в один 4-амперный H-мост (в паспорте на эту микросхему
дает конкретные советы о том, как это сделать). Одно предупреждение уместно
относительно L298; этот чип очень быстро переключается, достаточно быстро, чтобы
банальные защитные диоды (эквивалент 1N400X) не работают. Вместо,
используйте диод, такой как BYV27. Национальный полупроводник LMD18200
H-мост — еще один хороший пример; это обрабатывает до 3 ампер и имеет встроенный
защитные диоды.
В то время как встроенные H-мосты недоступны для очень больших токов или очень
высоким напряжением, на рынке есть хорошо спроектированные компоненты, упрощающие
построение Н-мостов из дискретных коммутаторов. Например,
International Rectifier продает линейку
драйверы половинного Н-моста; два таких чипа плюс 4 переключающих транзистора MOSFET
достаточно построить H-мост.
ИР2101,
ИР2102
и
ИР2103
являются основными драйверами половины Н-моста. Каждая из этих микросхем имеет 2 логических входа для
напрямую управлять двумя переключающими транзисторами на одной ноге H-моста. ИР2104
и
ИР2111
имеют аналогичную логику на стороне выхода для управления переключателями H-моста, но
они также включают логику на стороне ввода, которая в некоторых приложениях может уменьшить
потребность во внешней логике. В частности, 2104 включает в себя вход включения, поэтому
что 4 микросхемы 2104 плюс 8 переключающих транзисторов могут заменить L293 без
нужна дополнительная логика.
ИР2104
и
ИР2111
имеют аналогичную логику на стороне выхода для управления переключателями H-моста, но
они также включают логику на стороне ввода, которая в некоторых приложениях может уменьшить
потребность во внешней логике. В частности, 2104 включает в себя вход включения, поэтому
что 4 микросхемы 2104 плюс 8 переключающих транзисторов могут заменить L293 без
нужна дополнительная логика.
Технический паспорт для Микрочип (ранее Telcom Semiconductor) TC4467 семейство четырехъядерных CMOS-драйверов включает информацию о том, как использовать драйверы в этом семейство для управления силовыми полевыми МОП-транзисторами Н-моста, работающими от напряжения до 15 вольт.
Ряд производителей выпускают сложные микросхемы Н-моста, включающие ток
схема ограничения; они являются предметом следующего раздела.
Также стоит отметить наличие ряда 3-х фазных мостовых драйверов на
рынок, подходящий для привода Y или треугольника, 3-фазный, постоянный
магнитные степперы. Таких моторов мало, и фишек этих не было
разработан с учетом степперов.
