
Arduino пид регулятор температуры
К сути – есть линейные галогеновые лампы по Вт. Скажем, 8 шт. Итого излучаемая тепловая мощность получается порядка 2кВт, рабочий ток порядка 10А. Задача: примастырить к печи автономный работающий без непосредственного подключения к ПК контроллер с следующими режимами работы:. Нагрев печи до заданной температуры, поддержание заданной температуры в течение заданного времени. Для каждой ступени задается температура и время.
Поиск данных по Вашему запросу:
Arduino пид регулятор температуры
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.
По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- Проект 1. Инкубатор, собранный на Arduino UNO
- Главное меню
- Вы точно человек?
- Регулирование температуры с использованием PID
- Как самому инкубатор построить
- Использование ПИД на Arduino для управления электрическим нагревателем
- Проект 1.
Инкубатор, собранный на Arduino UNO
- ПИД-регулятор
 Инкубатор, собранный на Arduino UNO
Инкубатор, собранный на Arduino UNOПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: Термостат для инкубатора или PID регулятор на arduino
Проект 1. Инкубатор, собранный на Arduino UNO
Целью является регулирование температуры пластины путем изменения мощности, рассеиваемой сопротивлением. Используя датчик, я читаю температуру пластины и затем используется в качестве входа в ПИД-регулирование. Я запрограммировал также квадрат сигнальной волны для ШИМ. Источник Поделиться. Создан 04 ноя. TypeKazt благодарит вас за ответ — zakaria 05 ноя. ПИД имеет только один вход и один выход.
В вашем случае вход будет температурой. Использование ардуино было бы обработкой необработанных данных датчика температуры и реле температуры для ПИД. В зависимости от модели и модели PID могут быть определенные протоколы передачи, к которым вы должны придерживаться. Есть, скорее всего, библиотеки с открытым исходным кодом, которые будут правильно переносить данные. Именно за это отвечает вывод PID.
В зависимости от модели и модели PID могут быть определенные протоколы передачи, к которым вы должны придерживаться. Есть, скорее всего, библиотеки с открытым исходным кодом, которые будут правильно переносить данные. Именно за это отвечает вывод PID.
Наконец, ваш ПИД-регулятор имеет заданное значение. В вашем случае заданной точкой будет желаемая максимальная температура пластины. Эта настройка задается и изменяется вручную с помощью пользовательского ввода. На стороне примечания, если это персональный проект или не подлежащий доставке, я бы рекомендовал не использовать PID. Попробуйте обработать и проанализировать все данные исключительно на Arduino, так как это будет сложной и полезной задачей.
Регулирование температуры с использованием PID. Я создаю систему управления нагревом пластины с помощью ПИД-регулирования. Compute ; analogWrite 3,Output ; Serial. Источник Поделиться Создан 04 ноя. Похожие вопросы 1 Как сопоставить выход ПИД-регулятора с исполнительным механизмом?
Популярные вопросы Могу ли я программировать на Arduino без реальной доски?
Главное меню
Всем привет! Всех с праздником Победы! Реализованы следующие функции: 1. Пид регулятор 2. Вольтметр 3.
Пид регулятор 2. Вольтметр 3.
Найти готовый ПИД регулятор (тогда зачем на вообще WB, RS etc?) Написать На каждом этаже выведены датчики температуры. Opensource контроллер умного дома на базе Arduino Mega с поддержкой MQTT.
Вы точно человек?
Ильдар Минибаев: Добрый день. Как можно инверсию выходного сигнал можно сделать?. Alexander Nikolaev: Здравствуйте, подскажите, чему равна постоянная времени интегральной составляющей стандартно для arduino? Не интегральный коэффициент усиления, а время, за которое регулятор накапливает ошибку регулирования? Арам Хачатурян: сказал же могу объяснить что к чему каждый кофициент ну Грачик молчит видимо хочет сам разобраться. Arduino Wifi Control Circuit 9. Arduino Wall Following Robot 8. Arduino Metal Detector 4.
Регулирование температуры с использованием PID
Применение термостата с ПИД управлением не ограничено птицеводством, КО , проект может использоваться пивоварами для поддержания температуры сусла, винокурами в перегонных аппаратах, может просто греть воду в бойлере до приятной температуры, после небольших изменений, в самодельных паяльных станциях, муфельных печах, кароче везде где требуется контроль температуры с высокой точность. Принцип работы и отличие от банального термостата с гистерезисом показан в видео:. Имея навыки программирования ардуино, изменить код под другие датчики температуры труда не составит. Решил не усложнять и взял стандартный текстовый экран WHA , про подключение подобных экранов к ардуино уже написано тут. Подключается напрямую, без переходников на I2C.
Принцип работы и отличие от банального термостата с гистерезисом показан в видео:. Имея навыки программирования ардуино, изменить код под другие датчики температуры труда не составит. Решил не усложнять и взял стандартный текстовый экран WHA , про подключение подобных экранов к ардуино уже написано тут. Подключается напрямую, без переходников на I2C.
Forgot your password? By Алeксaндр Новиков , February 22, in Инкубаторы и инкубация.
Как самому инкубатор построить
PID регулятор широко используется в коптильнях, в отоплении, инкубаторах, йогуртницах, реакторах и прочих устройствах требующих поддержания точной температуры. Еще раз нажать на кнопку SET для завершения настроек. На дисплее PID контроллера появится надпись Al1. Нажатием на кнопку СВв или СВн настраиваем температуру срабатывания реле в режиме аларм. Продолжительным нажатием на кнопку SET сохраняем и выходим из режима.
Использование ПИД на Arduino для управления электрическим нагревателем
Учет финансово-хозяйственной деятельности юридических лиц Создаваемая информационная система предназначена для учета финансово-хозяйственной деятельности ПИД-регулятор температуры печи – как он связан с печью? Есть печь, в ней термометр и регулируемая заслонка подачи газа для сгорания.
Уделяется внимание контролю над температурой и разработке программируемого калибровочного источника излучения на базе ПИД- регулятора.
Проект 1. Инкубатор, собранный на Arduino UNO
Arduino пид регулятор температуры
Тема в разделе ” Птицеводство “, создана пользователем Um-ka , Искать только в заголовках Сообщения пользователя: Имена участников разделяйте запятой. Новее чем: Искать только в этой теме Искать только в этом разделе Отображать результаты в виде тем. Быстрый поиск.
ПИД-регулятор
ВИДЕО ПО ТЕМЕ: Двухканальный термостат на Arduino
Нужны клиенты? Регистрируйте компанию и добавляйте товары и услуги в каталог Zakupka. Пид регулятор температуры Пид регулятор температуры в Украине. Фильтр По рейтингу Сначала подешевле Сначала подороже Со скидками.
Фильтр По рейтингу Сначала подешевле Сначала подороже Со скидками.
Фермерам-гикам посвящается! Если вам нравится разводить и выращивать кур, то это статья для вас.
Если взять вот такое устройство вывода – 6 каналов в, и подключить к нему вот такую элекротермическую головку – управление в для 3х ходовых клапанов, тепмературу мерить по 1-wire … то встает вопрос, как правильно реализовывать на wiren board ПИД регулятор? Мне кажется, что он должен решать эту задачу полностью но могу ошибаться. Оно не stateless, там можно хранить состояния. Там есть обычные глобальные переменные, которые сохраняются между выполнениями правил. Добрый день! Тоже хочу сделать погодозависимую автоматику.
Фермерам-гикам посвящается! Если вам нравится разводить и выращивать кур, то это статья для вас. Для тех, кто планирует самостоятельно конструировать инкубатор. Для него же наверняка придется придумывать автоматику.
BalanceBall. Самобалансирующая платформа от А до Я / Хабр
Я студент Физтеха, факультета радиотехники и кибернетики, и как положено всем второкурсникам, в весеннем семестре надо сделать проект по информатике и микроконтроллерам. Я решил убить двух зайцев одним выстрелом и объединил два проекта в один.
Я решил убить двух зайцев одним выстрелом и объединил два проекта в один.
Долго выбирал тему проекта. Из идей была игра, похожая на Guitar Hero, но контроллером были твои руки, настукивающие барабанные биты по столу. Также задумывался над созданием светодиодной матрицы, управляемой по Bluetooth с компьютера, со своим простеньким скриптовым языком для написания анимаций. Задумки были интересными, но я все равно казались чем-то не тем. Потом я случайно наткнулся на это видео и сразу загорелся идеей реализовать что-то подобное. Вот что у меня вышло в итоге:
Кому интересен процесс создания этой платформы от проектирования деталей до написания компьютерного зрения, прошу под кат.
Принципиальная схема
Несколько дней обдумывал, из каких компонентов должно состоять это устройство, и как они должны между собой взаимодействовать. В конце концов пришел к такой схеме:
1. Веб камера передает изображение на ноутбук
2. По изображению определяются координаты шарика
По изображению определяются координаты шарика
3. Координаты подаются на вход PID регуляторов (2 независимых регулятора по X и по Y), и регуляторы считают углы, на которые должны повернуться сервоприводы
4. Углы передаются на Arduino и выставляются на сервоприводах
Изобразить это можно так:
Проектирование механики платформы
Первое, что надо было решить — это как платформа будет выглядеть и двигаться. На Youtube можно найти много видео с реализацией данной платформы. Просмотрев все и прочитав пару публикаций на данную тему, решил, что платформа будет закреплена на шаровой опоре, наклоняться будет с помощью 2-х сервоприводов, закрепленных на дощечке, на которой будет держаться вся конструкция. В самом начале видео видна реализация механики платформы.
Сервоприводы решил брать посильнее, чтобы быть уверенным, что они смогут наклонить платформу. Остановился на TOWER PRO MG996R, с моментом 9.4 кг/см.
Платформу, тяги, некоторые крепления решено было вырезать из орг стекла на лазерном резаке (благо он есть у нас в институте). Проектировал все в SolidWorks. Снизу на платформу было решено прикрепить крестовину, чтобы уже на нее крепить и шаровую опору, и угловые крепления для тяг. Вот несколько фотографий процесса создания:
Проектировал все в SolidWorks. Снизу на платформу было решено прикрепить крестовину, чтобы уже на нее крепить и шаровую опору, и угловые крепления для тяг. Вот несколько фотографий процесса создания:
Начал искать шаровые опоры. Найти подходящую было довольно сложно, и притом стоили они дорого. Мне подсказали, что вместо шаровой можно использовать карданчик, как на ключах. Купил карданчик, большой болт (на нем все держится) и гайки. К карданчику приварил гайку. Вот что получилось:
Сборка платформы
Крепил все на болты. Во-первых, потому что-то если вдруг где ошибешься, можно быстро раскрутить гайки и исправить ошибку. Во-вторых, конструкция в конце концов оказалась довольно громоздкой, но так как она на болтах, то очень легко разбирается и компактно укладывается, например, в шкаф.
Из фанеры вырезал квадратную площадку, на которую все крепил. Вот так выглядела платформа в собранном виде:
Крепления для камеры решил сделать позже, чтобы точно знать высоту на которую ее надо поднять.
Встал вопрос: на каком расстоянии крепить сервоприводы от центра, чтобы добиться максимальных углов отклонения. Задача была чисто геометрической и, посидев с карандашом и бумагой некоторое время, получилось найти это расстояние. Сервоприводы закрепил на фанере, прижав их к фанере с помощью металической пластинки и болтов.
Первый опыт
После полной сборки написал простенький скетч для Arduino, который наклонял платформу на некоторые углы.
Все вроде бы работало, и было сложно в это поверить.
Немного поигравшись с устройством, определил углы, когда платформа параллельна полу, определил максимальный и минимальный углы (±13 градусов). Настало время писать код.
Написание кода
После долгого обдумывания структуры программы я разделил ее на 4 модуля:
1. Компьютерное зрение
2. Реализация PID регулятора
3. Общение с Arduino по serial порту
4. Скетч для Arduino
Все писал на C++. Весь код можно посмотреть в этом репозитории.
Весь код можно посмотреть в этом репозитории.
Компьютерное зрение
Использовал OpenCV. Детектирование объекта решил делать по цвету. Во многом мне помогла эта статья. Алгоритм детектирования объекта можно разложить на несколько шагов:
1. Получение кадра с камеры
2. Конвертация из RGB в HSV
3. Пропускание через маску некоторого цвета (в моем случае белого)
4. Расчет моментов изображения
5. Расчет координат шарика по моментам
Реализация PID-регулятора
Прочитав на Википедии про PID регуляторы и посмотрев несколько уже готовых реализаций на github, мне не составило труда реализовать его на C++. На Хабре я видел немало статей про PID-регуляторы, поэтому на нем останавливаться не буду.
Общение с Arduino по serial-порту
Весь код я писал и запускал на OSX, поэтому проблем с общением по serial порту не было. Углы на Arduino я посылал в виде строчки “[ANGLE_X]:[ANGLE_Y]$”, где ANGLE_X и ANGLE_Y отвечали соответственно за наклон по своей оси и менялись в пределах от -100 до 100 (углы в процентах). Чтобы отослать эту строчку, я просто писал в файл вида “/dev/tty.usbmodem1421”.
Углы на Arduino я посылал в виде строчки “[ANGLE_X]:[ANGLE_Y]$”, где ANGLE_X и ANGLE_Y отвечали соответственно за наклон по своей оси и менялись в пределах от -100 до 100 (углы в процентах). Чтобы отослать эту строчку, я просто писал в файл вида “/dev/tty.usbmodem1421”.
Скетч для Arduino
Схема подключения выглядела так:
Arduino получала по serial порту строчку, парсила ее и после выставляла на сервоприводах нужные углы.
Заключение
На создание BalanceBall я потратил примерно 2 месяца. Самым сложным оказалась реализация механики. PID настраивал экспериментально. В планах создание математической модели платформы и теоретический расчет коэффициентов PID-регуляторов.
Всем спасибо за внимание!
Ссылки
Репозиторий проекта: github.com/karfly/balanceball
Папка с материалами: goo.gl/bmkexm
ПИД-регулятор
Дискретный ПИД регулятор
Color Detection & Object Tracking
ПИД | Контроллер Sous-vide на базе Arduino – SousViduino!
ПИД
Сохранить Подписаться
Пожалуйста, войдите, чтобы подписаться на это руководство.
После входа в систему вы будете перенаправлены обратно к этому руководству и сможете подписаться на него.
Прежде чем мы приступим к приготовлению пищи, мы должны решить простую задачу: как поддерживать заданную температуру воды в скороварке в течение длительного времени. Очень легко довести воду до кипения (просто нагрейте ее, пока она не начнет кипеть) или заморозить (охладить ее, пока она не затвердеет), но поддерживать стабильность водяной бани немного сложнее. Вода остывает по мере того, как она стоит, и по мере того, как она нагревает пищу, но скорость ее остывания зависит от количества воды, температуры в комнате, температуры еды и ее количества. Это сложно сделать «вручную», мы автоматизируем это с помощью ПИД-регулятор с обратной связью
Что такое ПИД?
Нам нужно, чтобы наш микроконтроллер управлял нагревателем, чтобы поддерживать стабильную температуру. Он может нагревать воду, включив рисоварку ( управление ), и может измерять температуру с помощью нашего водонепроницаемого датчика ( отзыв ).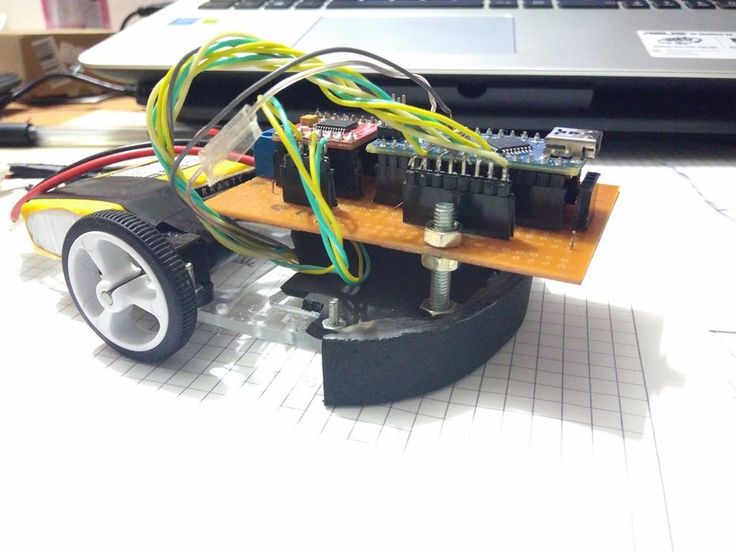 То, что посередине, — это алгоритм, который связывает их вместе. Алгоритм PID представляет собой тип управления с обратной связью. В этом приложении измерение температуры сравнивается с уставкой и разница между ними называется ошибкой . Ошибка используется для расчета корректировки выхода , который управляет нагревательным элементом.
То, что посередине, — это алгоритм, который связывает их вместе. Алгоритм PID представляет собой тип управления с обратной связью. В этом приложении измерение температуры сравнивается с уставкой и разница между ними называется ошибкой . Ошибка используется для расчета корректировки выхода , который управляет нагревательным элементом.
Название PID происходит от трех членов уравнения, используемого для расчета выходного сигнала:
- P – Термин Пропорциональный смотрит на текущее состояние процесса. Его значение пропорционально текущей ошибке.
- I – Термин Integral рассматривает историю процесса. Его значение представляет собой интеграл прошлых ошибок.
- D – Производная пытается предсказать будущее процесса. Его значение представляет собой производную или скорость изменения ошибки.
Этим трем терминам присваиваются веса, известные как параметры настройки : Kp, Ki и Kd. Три условия суммируются для получения управляющего выхода.
Три условия суммируются для получения управляющего выхода.
Базовое уравнение ПИД-регулятора не так сложно реализовать, и существует множество реализаций ПИД-регулятора. Но есть много «ошибок» в том, чтобы заставить PID хорошо работать в реальном приложении.
Эти подводные камни были квалифицированно рассмотрены Бреттом Борегардом в его библиотеке PID для Arduino. И четко задокументировано в его сообщении в блоге: Улучшение PID для начинающих.
Спасибо Бретту Борегарду за разрешение использовать эти изображения.
Управляющее программное обеспечение Автонастройка
Это руководство было впервые опубликовано 10 июня 2013 г. обновлено 10 июня 2013 г.
Эта страница (PID) последний раз обновлялась 29 октября 2022 г.
Текстовый редактор на базе tinymce.
Новая книга Elektor: ПИД-контроллеры на базе Arduino и Raspberry Pi
Доган Ибрагим 15 сентября 2022 г. 0097
0097
ПИД-регулятор — широко используемый алгоритм управления. Новая книга Elektor — отличный ресурс для тех, кто хочет использовать Raspberry Pi 4 или Arduino Uno в приложениях автоматического управления на основе PID.
Управление промышленными и коммерческими процессами является очень важной областью техники автоматического управления. В основном, в управлении технологическим процессом используются два типа алгоритмов управления: управление ВКЛ/ВЫКЛ и пропорционально-интегрально-дифференциальное (ПИД) управление. Оба алгоритма управления используют обратную связь, когда выходной отклик объекта сравнивается с желаемым значением, и предпринимаются действия для минимизации ошибки между ними.
В простых приложениях управления ВКЛ/ВЫКЛ полная мощность подается на установку, если ошибка положительная, в противном случае питание отключается. Управление ON/OFF имеет много недостатков. Во-первых, ошибка никогда не равна нулю и, как следствие, невозможно точное управление установкой. Например, при управлении температурой ВКЛ/ВЫКЛ измеренная температура показывает колебательный характер и может быть на несколько градусов выше или ниже желаемого значения. Управление ВКЛ/ВЫКЛ. Во-вторых, очень сложно управлять установками с задержкой по времени с помощью управления типа ВКЛ/ВЫКЛ. В-третьих, управление ВКЛ/ВЫКЛ обычно основано на использовании реле, и реле должно переключаться много раз, что сокращает срок его службы.
Во-первых, ошибка никогда не равна нулю и, как следствие, невозможно точное управление установкой. Например, при управлении температурой ВКЛ/ВЫКЛ измеренная температура показывает колебательный характер и может быть на несколько градусов выше или ниже желаемого значения. Управление ВКЛ/ВЫКЛ. Во-вторых, очень сложно управлять установками с задержкой по времени с помощью управления типа ВКЛ/ВЫКЛ. В-третьих, управление ВКЛ/ВЫКЛ обычно основано на использовании реле, и реле должно переключаться много раз, что сокращает срок его службы.
Что такое ПИД-регуляторы?
ПИД-регулирование является наиболее часто используемым алгоритмом управления, широко используемым в промышленных, технологических и коммерческих приложениях, и повсеместно признано самым простым и, возможно, лучшим алгоритмом управления, обеспечивающим точное управление установкой. Популярность и широкое использование ПИД-регуляторов можно частично объяснить их надежной работой в широком диапазоне приложений управления технологическими процессами, а частично простотой их использования, что позволяет инженерам легко и просто эксплуатировать и настраивать их. Как следует из названия, алгоритм PID состоит из трех основных коэффициентов; пропорциональные, интегральные и производные, которые изменяются для получения оптимального отклика.
Как следует из названия, алгоритм PID состоит из трех основных коэффициентов; пропорциональные, интегральные и производные, которые изменяются для получения оптимального отклика.
Выпуск новой книги
Новая книга «Практическое цифровое управление на основе PID с Raspberry Pi и Arduino Uno » посвящена использованию Raspberry Pi 4 и Arduino Uno в приложениях автоматического управления на основе PID. Книга начинается с базовой теории систем управления с обратной связью как с непрерывным, так и с дискретным временем. Подробно приведены временные характеристики систем первого и второго порядка. Приведены работающие и полностью протестированные проекты управления реальными системами с использованием алгоритмов ПИД-регулятора. Временная характеристика разомкнутого контура, различные методы настройки параметров ПИД и временная характеристика замкнутого контура разработанных систем приведены в книге вместе с блок-схемами, принципиальными схемами, алгоритмами ПИД-регулятора и полными листингами программ и описания программ для Raspberry Pi и Arduino Uno.
Пример ПИД-регулятора
Проект из книги показан ниже. Он используется для контроля уровня воды в резервуаре с помощью Raspberry Pi 4, ультразвукового датчика, резервуара, резервуара, погружного насоса, переключателя MOSFET и источника питания. Временная характеристика выходного шага системы с ПИД-регулятором показана на диаграмме, где требовалось установить уровень воды на уровне 10 сантиметров.
Проекты, приведенные в книге, должны обучать основам теории и применению ПИД-регуляторов, и читатели могут легко модифицировать эти проекты для других приложений управления. Заинтересованные читатели могут расширить свои знания, выполнив поиск в Интернете, где есть множество руководств, заметок по применению, проектов и статей по ПИД-регуляторам.
