Материалы по робототехнике и Arduino
Принципиальная схема контроллера LEKN 3.2, описание ее блоков
Схемотехника контроллера LEKN 3.2 построена на основе Arduino UNO R3: те же микроконтролер ATmega328P и микросхема связи USB-USART Ch440G.
Прошивка контроллера LEKN 3.2 аналогична прошивке Arduino: через встроенный Arduino-загрузчик.
Для работы контроллера LEKN 3.2 в микроконтроллер должна быть загружена прошивка GRBL.
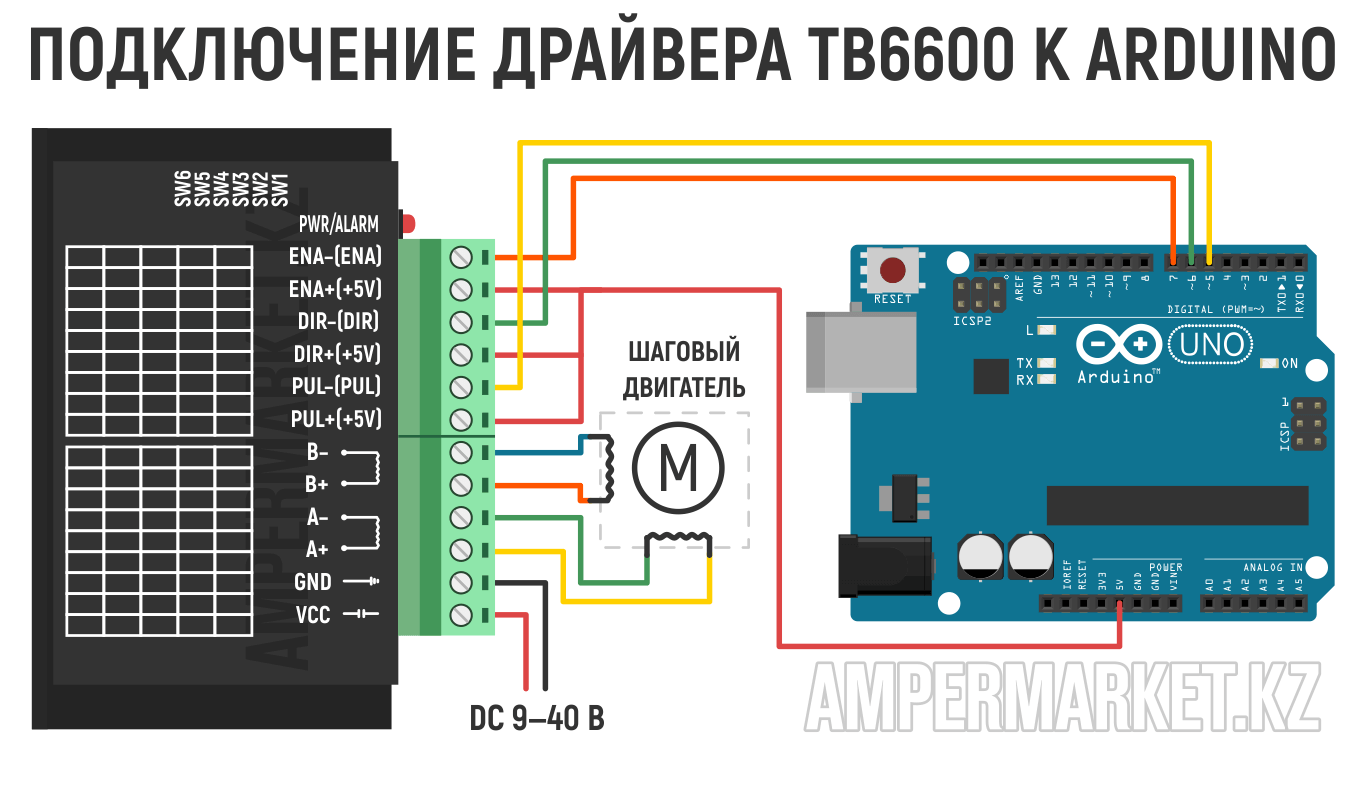
К ATmega328P подключены 4 драйвера шагового двигателя A4988 (зеленые или красные платы, втыкаемые в разъемы на контроллере LEKN 3.2).
Драйвер управляется по линиям STEP (следующий шаг) и DIR (направление вращения). К каждому драйверу подключен шаговый двигатель,
содержащий две электрически не связанные обмотки. В активном состоянии на эти обмотки подается питание 24 вольта через ключевые транзисторы драйвера.
Ротор шагового двигателя поворачивается вслед за магнитным полем, которое сформировано обмотками.
Настройки станка с ЧПУ хранятся в GRBL-регистрах (в микроконтроллере ATmega328P).
Принцип работы шагового двигателя
Техника микростепирования
Расчет расстояния разгона от точки старта (нулевая скорость) до точки выхода на требуемую скорость, зная ускорение (мм/с2) в регистрах GRBL
Отчет по 3-м пунктам выше от Миришкина А.Д.
Команда перемещения каретки (G-code)
[ВМИ]:
Команда G-code может имеет следующую структуру: G ## X ## Y ## Z ## F ##
Первым параметром указывается команда G-кода, пусть это будет G01, что означает «Линейная интерполяция», то есть указание станку двигаться от текущей позиции до
конечных координат X, Y и Z по прямой.
С помощью значения F устанавливается максимальная скорость, с которой будет выполняться перемещение.
Если максимальная скорость F превышает скорость, указанную в настройках GRBL, то контроллер использует значение скорости из регистров GRBL.
Но важно помнить одну вещь из физики – объект не может сразу развить максимальную скорость и не может моментально остановиться.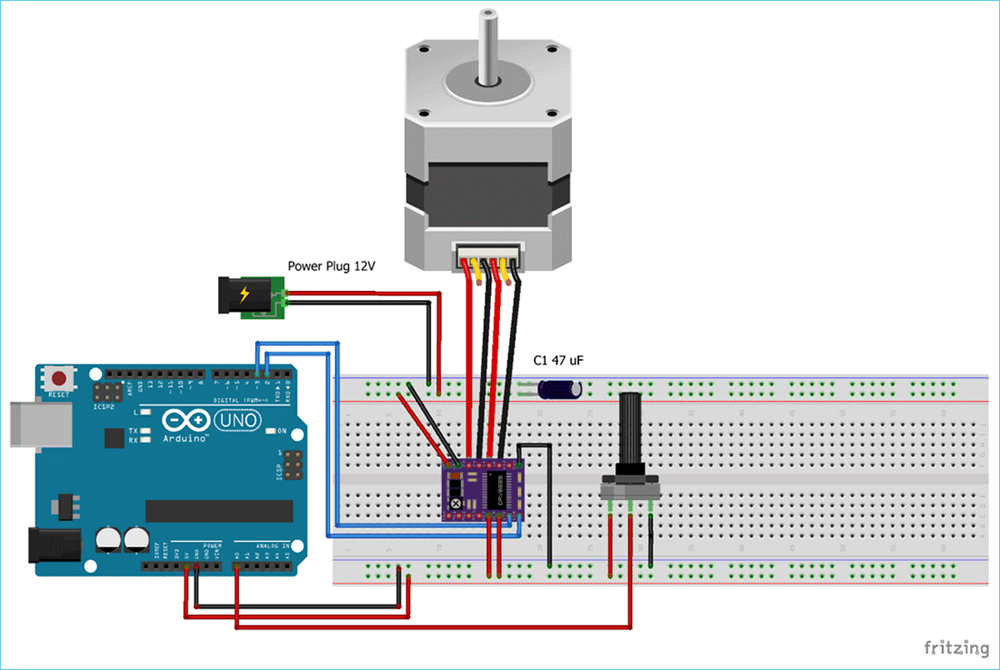
Чем определяется максимальная скорость перемещения каретки станка с ЧПУ?
[ВМИ, МАП]:
Максимальная скорость перемещения каретки станка с ЧПУ по каждой их осей X, Y и Z задается в настройках GRBL (регистры $110-112).
Следующие параметры будут влиять на скорость перемещения каретки.
1) Шаг резьбы. Чем больше шаг, тем больше расстояние, на которое перемещается каретка при обороте винта.
2) Многозаходность резьбы. Если заходов у винта несколько, то расстояние, на которое перемещается каретка при обороте винта, будет пропорционально шагу резьбы и равно произведению шага на количество заходов.
4) Мощность двигателя и вес каретки.
 Двигатель должен легко перемещать каретку. Если его тяга недостаточна, будет наблюдатьcя пропуск шагов. Это приводит к ошибкам в перемещении: каретка не доходит до заданной точки.
Двигатель должен легко перемещать каретку. Если его тяга недостаточна, будет наблюдатьcя пропуск шагов. Это приводит к ошибкам в перемещении: каретка не доходит до заданной точки. 5) Драйвер шагового двигателя. Если драйвер не успевает отрабатывать поступающие ему “командные” сигналы, то происходит пропуск шага двигателем. Таким образом, для больших скоростей нужен быстродействующий драйвер.
6) Контроллер шаговых двигателей. Контроллер управляет драйверами, поэтому его низкая производительность (малая частота выдачи импульсов STEP) может не дать выигрышать даже при установке скоростных драйверов.
Расчет линейной скорости перемещения каретки для винтовой передачи на основе значений регистров GRBL, параметров двигателя и характеристик передачи
[ВМИ, МАП]:
Винтовая передача ЧПУ является наиболее часто используемым вариантом перевода вращательного движения вала шагового
двигателя в линейное перемещение. Для расчёта необходимо знать шаг винта.
Для ЧПУ-станков обычно используются винты с трапецеидальной резьбой.
Для расчёта необходимо знать шаг винта.
Для ЧПУ-станков обычно используются винты с трапецеидальной резьбой.
Типовая маркировка: “Трапецеидальный винт TR10x2” (TR – трапецеидальная; 10 – диаметр 10 мм; 2 – шаг резьбы 2 мм).
Стоит отметить, что помимо однозаходной резьбы, часто используется многозаходная (на ходовом винте нарезается несколько “пареллельных” резьбовых канавок).
В этом случае ходом резьбы (линейным расстоянием, пройденным гайкой за один полный оборот)
будет произведение шага резьбы на количество заходов.
Для четырёх заходной резьбы – 8 мм (2 мм * 4).
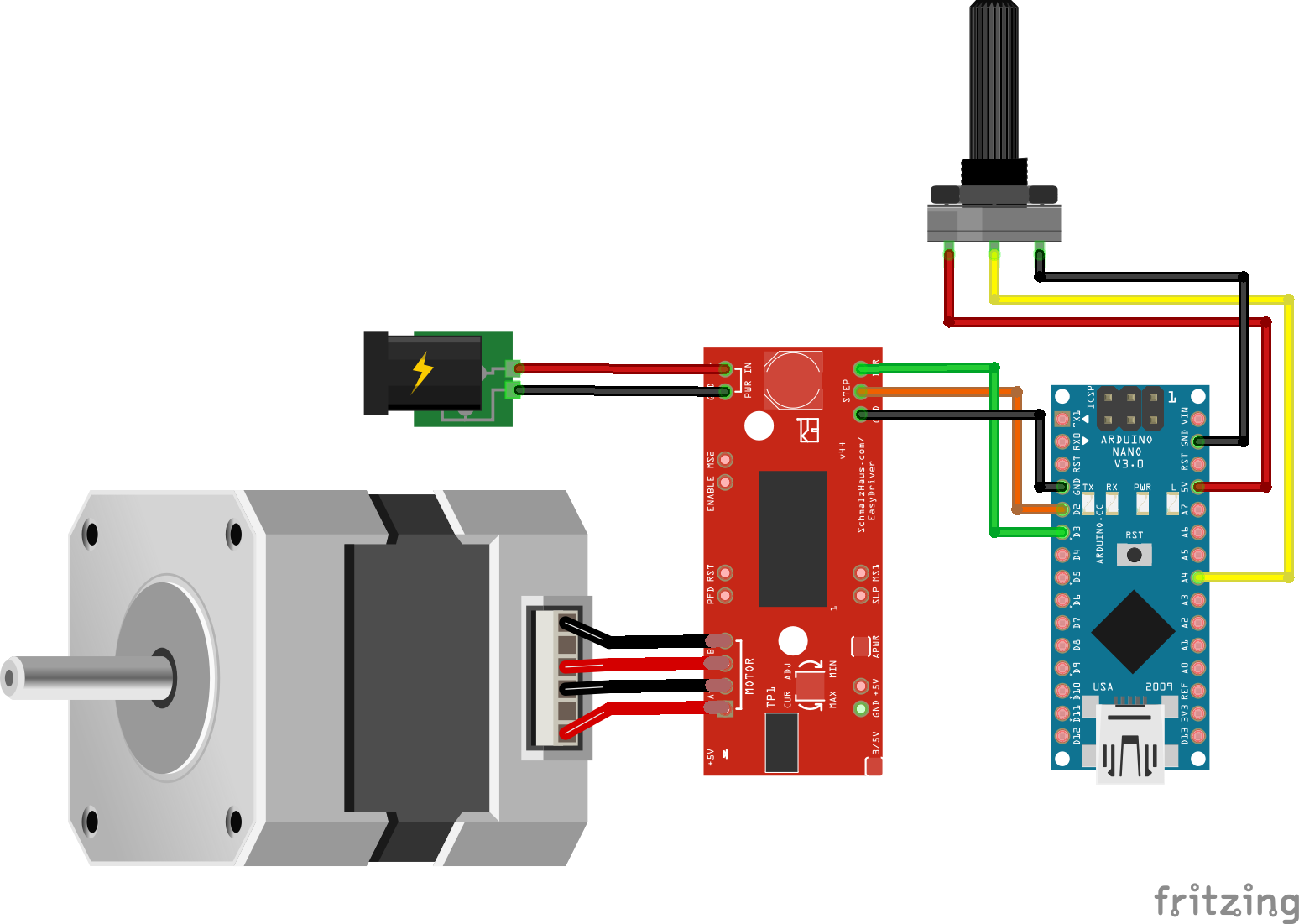
К контроллеру LEKN 3.2 на установке GeRDA подключен двигатель NEMA 23 (без редуктора, посредством муфты в торце винта).
Один полный шаг шагового двигателя равен 1.8 градуса. Таким образом, ему нужно выполнить 200 полных шагов для совершения полного оборота.
На один миллиметр линейного перемещения понадобится сделать 200/8=25 полных шагов.
Для расчета линейной скорости перемещения каретки достаточно знать скорость вращения двигателя и упомянутый шаг резьбы на винте. Например, для однозаходного ходового винта с шагом в 2 мм при скорости вращения мотора 600 оборотов в мин и шагом в 2 мм каретка будет двигаться со скоростью 2*600 = 1200 мм в мин.
Второй способ – эмпирический. Можно задать перемещение каретки на относительно большое расстояние, чтобы было удобно засечь время движения. Зная путь и время движения, можно получить среднюю скорость перемещения.
Необходимо учитывать, что каретка может двигаться сразу по нескольким осям (например, вдоль направлений по X и Y одновременно). В этом случае линейная скорость перемещения расчитывается по теореме Пифагора.
Полезные статьи
[1] Что такое G-CODE? Как читать команды G-кода?
[2] Команды GRBL v1.1. Подробное описание
[3] Прошивка grbl 1.1, настройка – инструкция на русском
Печатная плата для управления шаговым двигателем без Arduino | Hackaday.
 io
ioПосмотреть галерею
Команда (1)
- Инновационный
Печатная плата управления шаговым двигателем без Arduino
Детали
Привет, друзья, на этот раз я разработал контроллер на основе IC 555 для управления шаговым двигателем.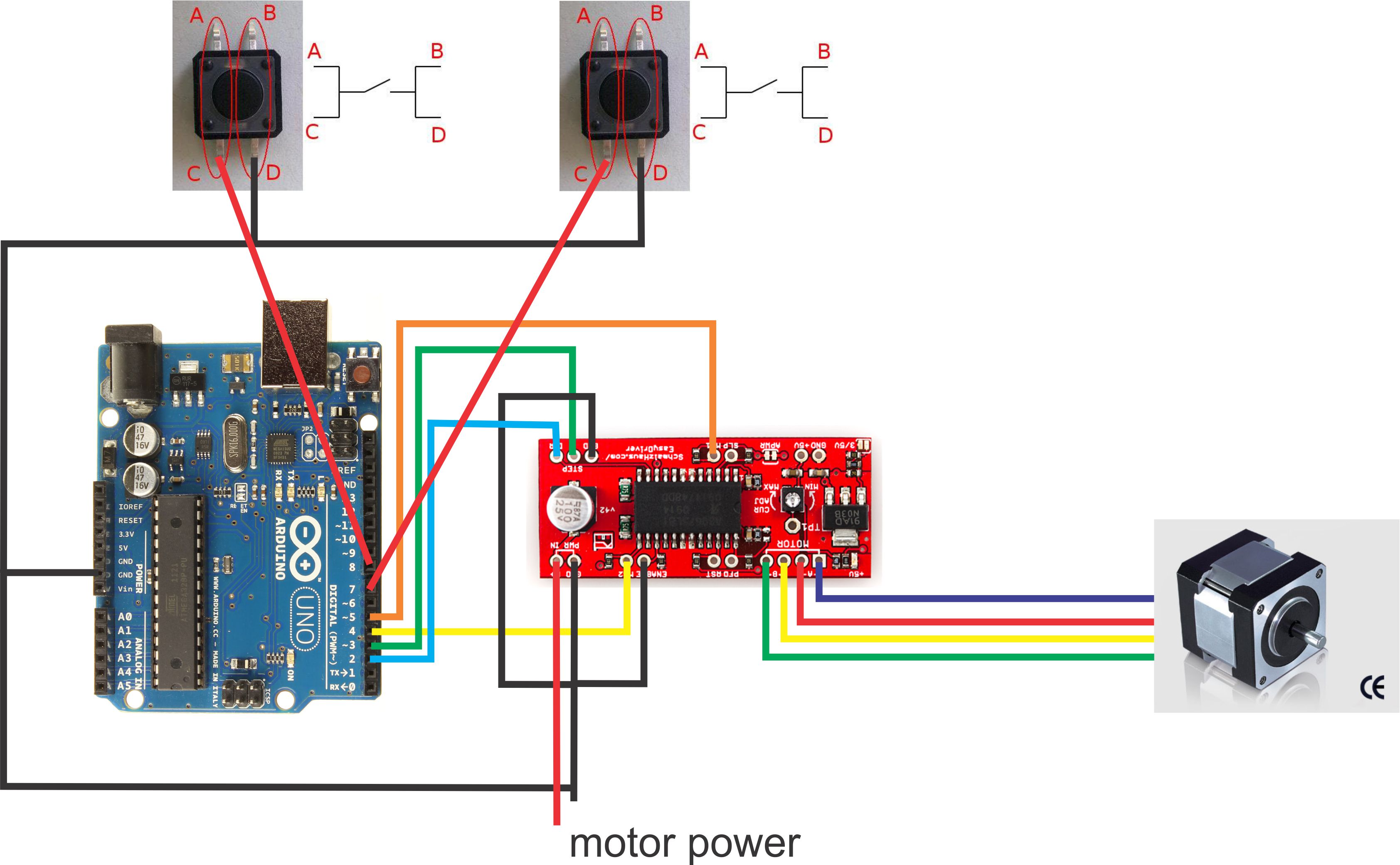 Этот контроллер может управлять скоростью, а также направлением шагового двигателя.
Этот контроллер может управлять скоростью, а также направлением шагового двигателя.
Этот небольшой контроллер на основе печатной платы очень удобен для тестирования ИС драйвера шагового двигателя A4988 и шаговых двигателей. Главный плюс этого контроллера в том, что он не требует никакого кодирования. Те из вас, кто работал с шаговым двигателем в любой момент времени
, они должны знать, что управлять шаговым двигателем слишком сложно. Традиционно нам нужен микроконтроллер, затем нам нужна микросхема драйвера шагового двигателя, затем нам нужно написать код для запуска шагового двигателя затем нам нужно загрузить этот код в наш микроконтроллер. Все после этого мы можем запустить или шаговый двигатель.
Предположим, вам просто нужно проверить шаговый двигатель или драйвер шагового двигателя A4988, или вам нужно запустить шаговый двигатель для любого простого приложения, которое вы должны использовать традиционным способом.
Однако, используя этот контроллер, просто подключите провода шагового двигателя и подключите питание поставить на печатную плату, вот и все, вы готовы к работе.
Контроллер печатной платы, который я использовал в этом проекте, заказан на сайте JLCPCB.com. Далее в этом посте мы подробно узнаем о том, как работает этот контроллер.0003
У меня также есть полное видео об этом проекте на моем канале YouTube, вы можете посмотреть полное видео, вы получите большую часть идеи, посмотрев это видео, чтобы посмотреть видео, просто нажмите на изображение выше
КАК ШАГОВЫЙ ДВИГАТЕЛЬ WORKS
Прежде чем двигаться дальше, нам нужно знать, как на самом деле работает шаговый двигатель. Шаговые двигатели очень сильно отличаются и сложны от традиционных двигателей постоянного тока. Шаговый двигатель работает поэтапно, как следует из названия. В основном шаговые двигатели представляют собой бесщеточные двигатели постоянного тока, обычно ротор с постоянным магнитом, помещенный между обмоткой статора.
Затем на обмотку статора подается питание шаг за шагом в последовательном порядке, чтобы она намагничивалась и заставляла ротор выровняться с магнитным полем катушки статора.
таким образом ротор начинает вращаться маленькими шажками, благодаря такому поведению двигатель получил свое название «шаговый двигатель» система обратной связи.
шаговый двигатель такого качества лучше всего подходит для использования там, где требуется высокоточное движение, например, на станках с ЧПУ.
Также здесь мы должны отметить еще одно лучшее качество шагового двигателя — высокий крутящий момент при низких оборотах и удерживающий крутящий момент.
Мы знаем, что ротор шагового двигателя вращается за счет последовательного возбуждения катушек статора.
, если мы подадим питание на один набор катушек с временной задержкой, соответственно, мы получим более медленные обороты шагового двигателя.
, следовательно, мы также получаем высокий крутящий момент, потому что ротор всегда удерживается в магнитном поле возбужденных катушек статора.
Если мы продолжим подавать питание на один набор катушек статора, ротор останется на своем месте с максимальным крутящим моментом.
Способы управления
Режим возбуждения с одной катушкой Существует множество способов управления шаговым двигателем. Принцип работы шагового двигателя с возбуждением одной катушкой является основным методом управления шаговым двигателем.
Полношаговый режим В полношаговом режиме 2 катушки возбуждаются одновременно, что обеспечивает более высокий крутящий момент для двигателя.
Микрошаговый режим Микрошаговый режим в настоящее время является самым известным способом управления шаговым двигателем, с помощью этого режима привода можно достичь высокой точности. Микрошаговый режим обеспечивает плавное и бесшумное движение шагового двигателя за счет подачи переменного регулируемого тока на катушку в виде синусоидальной волны.
ИС ШАГОВОГО ДРАЙВЕРА
До сих пор мы изучали, как работает шаговый двигатель, теперь мы увидим, что нам нужно для запуска шагового двигателя. меньше все работают по одному и тому же принципу.
A4988 — это микрошаговый драйвер для управления биполярными шаговыми двигателями со встроенным преобразователем для простоты эксплуатации. Это означает, что мы можем управлять шаговым двигателем всего двумя контактами от нашего контроллера или одним для управления направлением вращения и…
Это означает, что мы можем управлять шаговым двигателем всего двумя контактами от нашего контроллера или одним для управления направлением вращения и…
Посмотреть все подробности
Нравится этот проект?
ДелитьсяБлог Hobby Components посвящен полезным руководствам, проектам и новостям.
- Новые продукты
Анита 02 минуты
Что ж, после большой работы и усилий наш новый домашний датчик на базе ESP8266 наконец-то доступен! Благодаря набору датчиков он отлично подходит для беспроводного мониторинга условий окружающей среды и присутствия в комнате. Поскольку он основан на ESP8266, он совместим с Arduino IDE, и мы предоставили простую библиотеку с примерами скетчей…
Подробнее- Новые продукты
Анита 06 мин.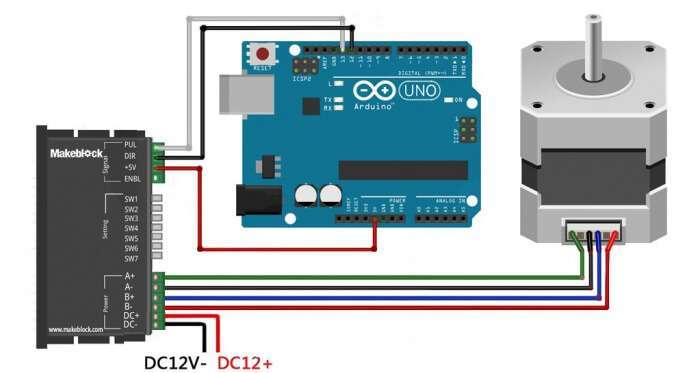
Микрозарядное устройство Hobby Components для литиевых батарей HCMODU0235 Микрозарядное устройство для литиевых батарей Hobby Components представляет собой крошечный одноэлементный (3,7 В) модуль зарядного устройства для литиевых батарей, который не только включает в себя как защиту и контроль заряда батареи, но также и напряжение батареи. и защита от перегрузки по току и защита от перегрузки батареи. Этот крошечный модуль размером всего 27 x 14 мм может легко…
Подробнее- Новые продукты
- Новости
Анита 012 минут
Всем привет! Мы очень усердно работаем здесь, в Hobby Components, чтобы расширить наш ассортимент mLink. Если вы еще не видели его, то этот пост для вас! Я собираюсь дать вам краткий обзор модулей mLink, которые мы уже выпустили, и мы добавим больше сообщений, когда в будущем будут добавлены новые модули….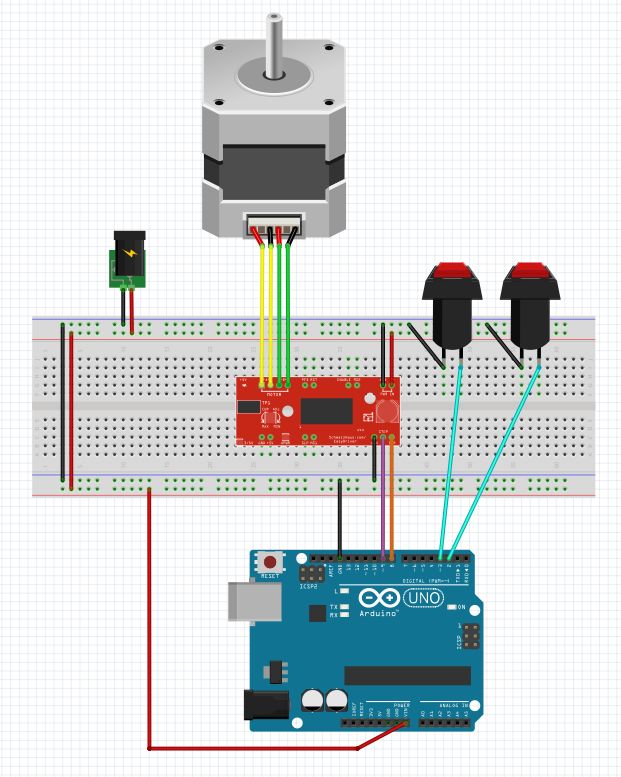
- Руководства по продуктам
- Учебники
Andrew 06 минут
С тех пор, как на рынке появились недорогие модули на основе беспроводного микроконтроллера ESP8266, ESP8266 стал одним из самых популярных способов удаленного управления своими проектами для любителей. Это сочетание недорогого, но мощного беспроводного микроконтроллера ARM в сочетании с доступностью среды разработки Arduino IDE, которая…
ПодробнееКрис Шарп 029 мин.
В этой заключительной части серии мы будем использовать три модуля дисплея OLED SSD1306 с разрешением 128×64 пикселей для создания дисплея, который можно найти в вестибюле средняя железнодорожная станция.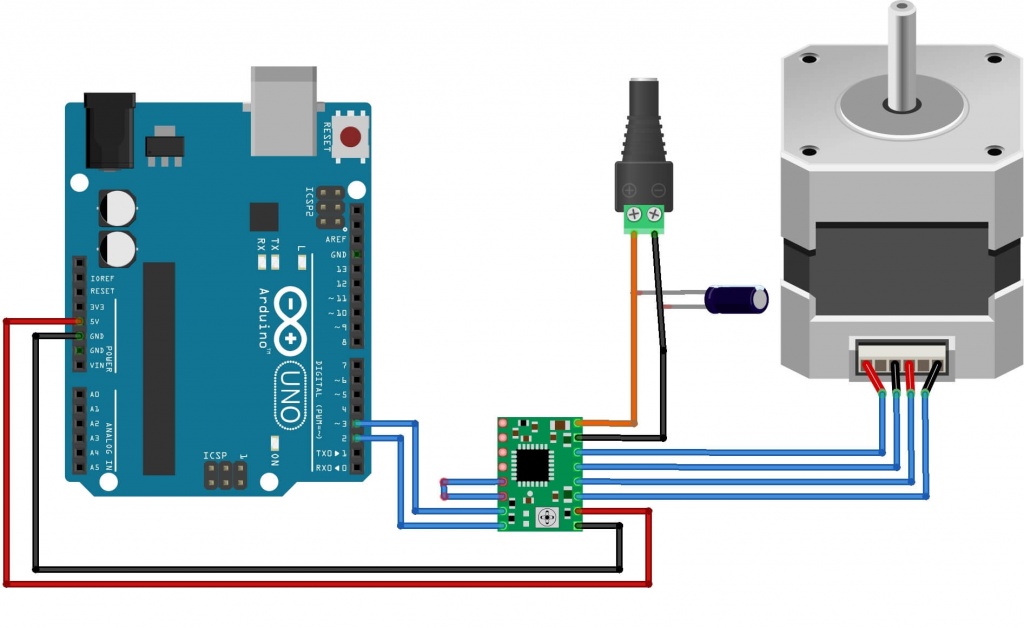 На двух экранах будет подробно расписано отправление, на третьем — часы и прибытие поездов. Собрав код из этой серии,…
На двух экранах будет подробно расписано отправление, на третьем — часы и прибытие поездов. Собрав код из этой серии,…
Крис Шарп 016 мин.
В этой серии мы создаем основной информационный дисплей для пассажиров для модели железной дороги с использованием модуля дисплея OLED SSD1306 128×64 пикселей, управляемого нано. До сих пор мы рассмотрели, как создать доску отправления, комбинированные часы и доску прибытия. В этом последнем посте мы вернемся к нашей доске вылетов…
ПодробнееКрис Шарп 023 мин.
Мы продолжаем серию статей о том, как использовать OLED-дисплей SSD1306 128×64 пикселей на модели железной дороги.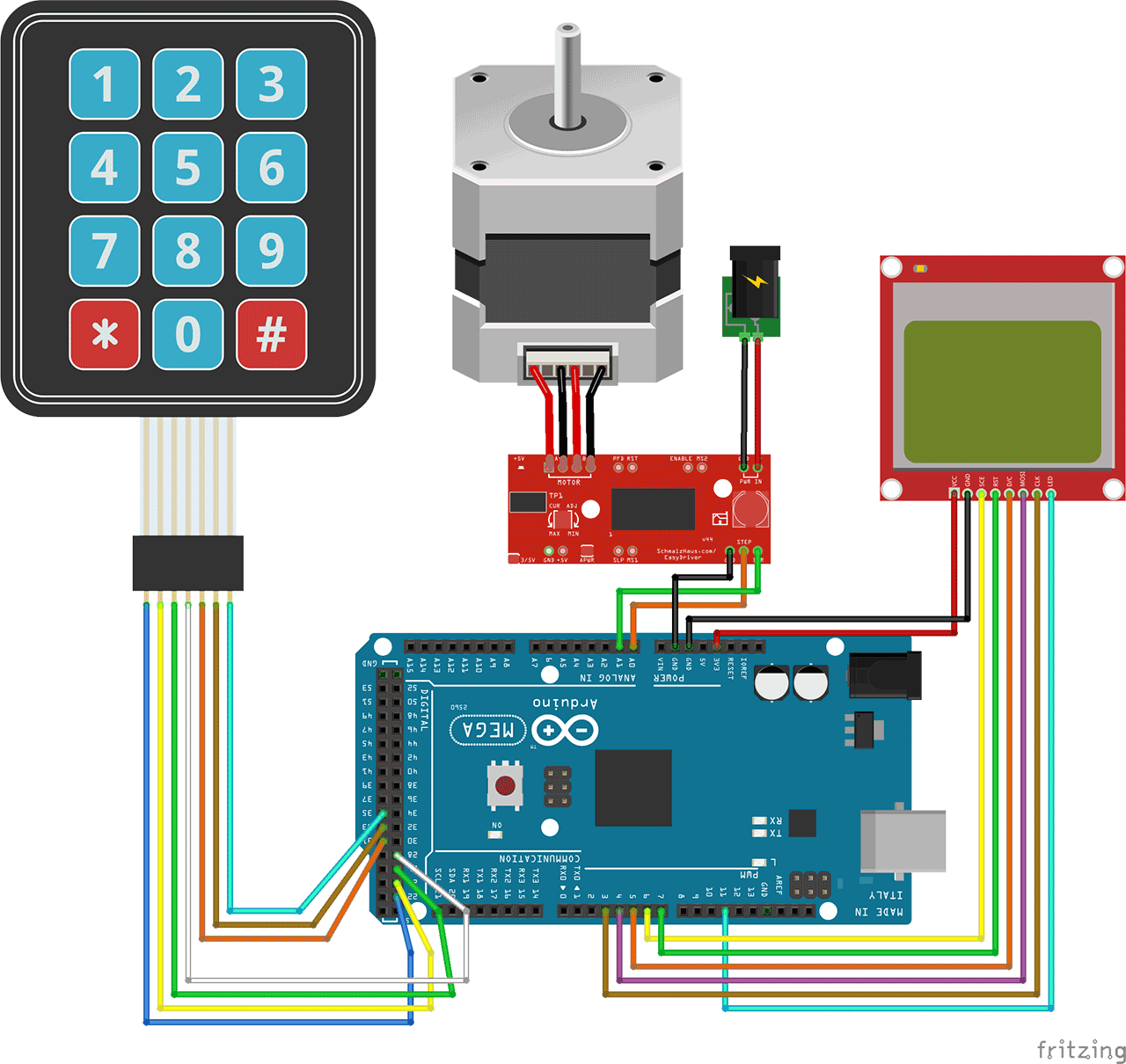 В этой части мы будем делать доску прибытия. Информация, которая нам нужна для прибытия, очень похожа на информацию для нашего табло отправления. Мы будем адаптировать код отправления для создания…
В этой части мы будем делать доску прибытия. Информация, которая нам нужна для прибытия, очень похожа на информацию для нашего табло отправления. Мы будем адаптировать код отправления для создания…
Крис Шарп 020 минут
В этой серии статей рассматривается, как использовать OLED-дисплей SSD1306 с разрешением 128×64 пикселей в качестве информационного дисплея для пассажиров на модели железной дороги. Первым в серии был создан дисплей отправления поездов. Вторые часы, чтобы держать время. Мы собираемся объединить их, чтобы создать динамическую доску отправлений, которая…
ПодробнееКрис Шарп 011 минут
В этой серии статей рассматривается, как использовать OLED-дисплей SSD1306 с разрешением 128×64 пикселей в качестве информационного дисплея для пассажиров на модели железной дороги.