
%d0%b0%d1%81%d0%b8%d0%bd%d1%85%d1%80%d0%be%d0%bd%d0%bd%d1%8b%d0%b9%20%d0%b4%d0%b2%d0%b8%d0%b3%d0%b0%d1%82%d0%b5%d0%bb%d1%8c%20%d1%81%20%d0%ba%d0%be%d1%80%d0%be%d1%82%d0%ba%d0%be%d0%b7%d0%b0%d0%bc%d0%ba%d0%bd%d1%83%d1%82%d1%8b%d0%bc%20%d1%80%d0%be%d1%82%d0 — с русского на все языки
Все языкиАбхазскийАдыгейскийАфрикаансАйнский языкАканАлтайскийАрагонскийАрабскийАстурийскийАймараАзербайджанскийБашкирскийБагобоБелорусскийБолгарскийТибетскийБурятскийКаталанскийЧеченскийШорскийЧерокиШайенскогоКриЧешскийКрымскотатарскийЦерковнославянский (Старославянский)ЧувашскийВаллийскийДатскийНемецкийДолганскийГреческийАнглийскийЭсперантоИспанскийЭстонскийБаскскийЭвенкийскийПерсидскийФинскийФарерскийФранцузскийИрландскийГэльскийГуараниКлингонскийЭльзасскийИвритХиндиХорватскийВерхнелужицкийГаитянскийВенгерскийАрмянскийИндонезийскийИнупиакИнгушскийИсландскийИтальянскийЯпонскийГрузинскийКарачаевскийЧеркесскийКазахскийКхмерскийКорейскийКумыкскийКурдскийКомиКиргизскийЛатинскийЛюксембургскийСефардскийЛингалаЛитовскийЛатышскийМаньчжурскийМикенскийМокшанскийМаориМарийскийМакедонскийКомиМонгольскийМалайскийМайяЭрзянскийНидерландскийНорвежскийНауатльОрокскийНогайскийОсетинскийОсманскийПенджабскийПалиПольскийПапьяментоДревнерусский языкПортугальскийКечуаКвеньяРумынский, МолдавскийАрумынскийРусскийСанскритСеверносаамскийЯкутскийСловацкийСловенскийАлбанскийСербскийШведскийСуахилиШумерскийСилезскийТофаларскийТаджикскийТайскийТуркменскийТагальскийТурецкийТатарскийТувинскийТвиУдмурдскийУйгурскийУкраинскийУрдуУрумскийУзбекскийВьетнамскийВепсскийВарайскийЮпийскийИдишЙорубаКитайский
Все языкиАнглийскийНемецкийНорвежскийКитайскийИвритФранцузскийУкраинскийИтальянскийПортугальскийВенгерскийТурецкийПольскийДатскийЛатинскийИспанскийСловенскийГреческийЛатышскийФинскийПерсидскийНидерландскийШведскийЯпонскийЭстонскийТаджикскийАрабскийКазахскийТатарскийЧеченскийКарачаевскийСловацкийБелорусскийЧешскийАрмянскийАзербайджанскийУзбекскийШорскийРусскийЭсперантоКрымскотатарскийСуахилиЛитовскийТайскийОсетинскийАдыгейскийЯкутскийАйнский языкЦерковнославянский (Старославянский)ИсландскийИндонезийскийАварскийМонгольскийИдишИнгушскийЭрзянскийКорейскийИжорскийМарийскийМокшанскийУдмурдскийВодскийВепсскийАлтайскийЧувашскийКумыкскийТуркменскийУйгурскийУрумскийЭвенкийскийБашкирскийБаскский
Электродвигатели асинхронные с короткозамкнутым ротором
Асинхронные электродвигатели с короткозамкнутым ротором сохраняют почти постоянную скорость вращения вала при разных нагрузках и переносят большие перегрузки.
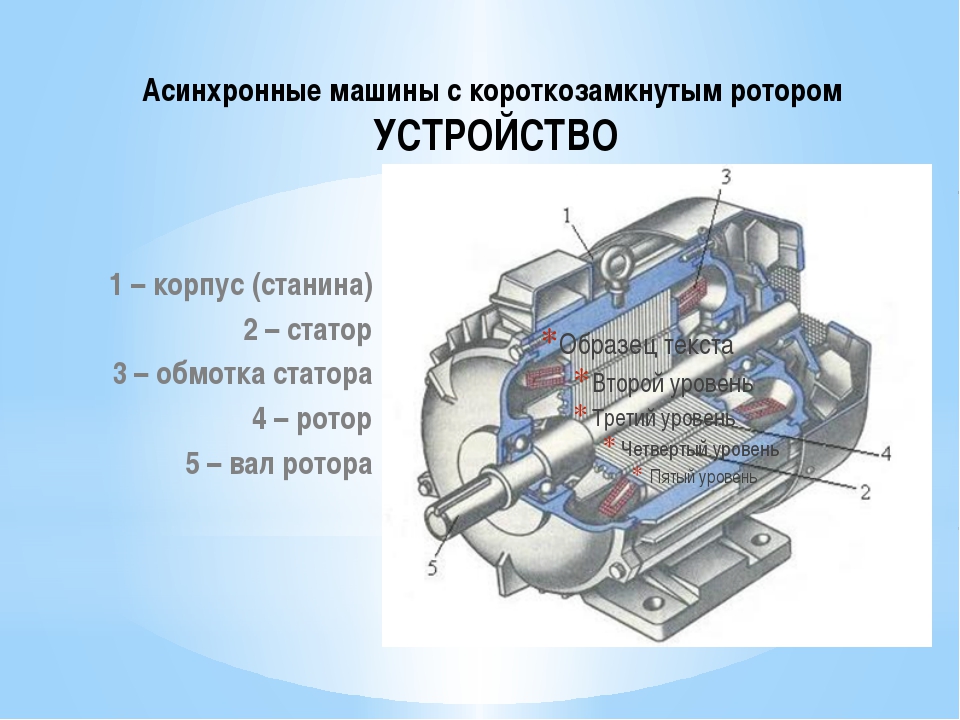 Их устройство и пуск просты, а к.п.д. достаточно высок. [c.75]
Их устройство и пуск просты, а к.п.д. достаточно высок. [c.75]Асинхронный электродвигатель с короткозамкнутым ротором состоит из двух основных узлов неподвижного статора и подвижного ротора. В пазы собранного сердечника уложена трехфазовая обмотка. Сердечник статора укреплен в чугунном корпусе двигателя. На общий клеммник, укрепленный снаружи на корпусе, выведены три фазы обмотки статора. В пазы ротора заложены медные стержни или они залиты под давлением алюминием. Стержни с двух сторон припаяны к медным коль- [c.31]
На рис. 33 показан асинхронный электродвигатель с короткозамкнутым ротором в разобранном виде. Дви-
Наибольшее распространение получили асинхронные электродвигатели с короткозамкнутым ротором, наиболее простые и надежные в эксплуатации. Но они не допускают экономичного изменения числа оборотов уменьшение числа оборотов реостатом в цепи статора столь же неэкономично, как и регулирование дросселированием. [c.171]
[c.171]
Магнитный пускатель представляет собой аппарат, состоящий из одного или двух контакторов, иногда содержащий реле и предназначенный для запуска и останова асинхронных электродвигателей с короткозамкнутым ротором, В схемах оборудования электровакуумного производства весьма часто используется как пусковой и коммутационный прибор дистанционного действия при ручном и автоматическом управлении энергоемкими процессами. Промышленностью выпускаются нереверсивные и реверсивные магнитные пускатели. [c.46]
Аппараты, не требующие регулирования частоты вращения внутренних устройств, должны комплектоваться синхронными и асинхронными электродвигателями с короткозамкнутым ротором. Электродвигатели постоянного тока могут применяться только в тех случаях, когда электродвигатели переменного тока не обеспечивают требуемых характеристик или неэкономичны. [c.265]
Экранированный электропривод (рис. 6.4) представляет собой взрывозащищенный асинхронный трехфазный электродвигатель с короткозамкнутым ротором, с защитными гильзами, предохраняющими активные части ротора и статора от воздействия среды, заполняющей полость ротора электродвигателя. Полость статора заполнена трансформаторным сухим маслом по ГОСТ 982—80. На одном конце вала ротора установлено перемешивающее устройство, на другом — центробежный насос для обеспечения циркуляции жидкости в автономном контуре электропривода, необходимой для смазки подшипников и охлаждения электропривода.
Полость статора заполнена трансформаторным сухим маслом по ГОСТ 982—80. На одном конце вала ротора установлено перемешивающее устройство, на другом — центробежный насос для обеспечения циркуляции жидкости в автономном контуре электропривода, необходимой для смазки подшипников и охлаждения электропривода.
Тепловые реле предназначены для защиты от перегрузок асинхронных электродвигателей с короткозамкнутым ротором. Так как они не защищают от коротких замыканий и сами нуждаются в такой защите, то на ответвлении к электродвигателю перед пускателем ставится автоматический выключатель с электромагнитным расщепителем. [c.816]
В отличие от обычного асинхронного электродвигателя с короткозамкнутым ротором у экранированного двигателя в зазор между ротором и статором вводится цилиндрический экран. Это приводит к тому, что зазор между железом статора и ротора в экранированном двигателе больше, чем в обычном. При этом экран устанавливается вплотную к железу статора, что позволяет делать экран достаточно тонким даже при больших давлениях в аппарате. Статор в этом случае является для экрана опорой. Конструкция такого двигателя будет рассмотрена в настоящей главе. [c.43]
При этом экран устанавливается вплотную к железу статора, что позволяет делать экран достаточно тонким даже при больших давлениях в аппарате. Статор в этом случае является для экрана опорой. Конструкция такого двигателя будет рассмотрена в настоящей главе. [c.43]
Асинхронные электродвигатели с короткозамкнутым ротором обладают почти постоянной скоростью вращения вала при разных нагрузках, переносят большие перегрузки, пуск и устройство их просты, к. п. д. их выше, чем двигателей с фазным ротором. [c.233]
В 1953 г. в ЛенНИИхиммаше был изготовлен опытный экранированный электродвигатель мощностью 7 кВт при частоте тока 50 Гц (рис. 27). Электродвигатель был предназначен для герметичного (бессальникового) нагнетателя для агрессивных сред. Он был построен на основе асинхронного электродвигателя с короткозамкнутым ротором. При этом было использовано железо ротора и статора электродвигателя А51/2. [c.67]
Агрегаты этой серии оснащены двухполюсными асинхронными электродвигателями с короткозамкнутым ротором.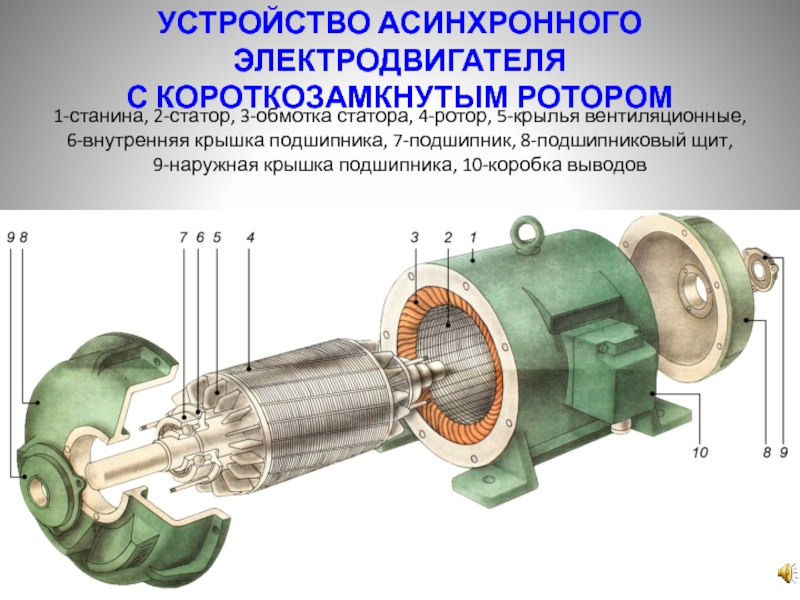
Защита от поражения электрическим током при трехфазных несимметричных, двух- и однофазных замыканиях на землю, а также при однофазных касаниях к токоведущим частям. Защита электрических цепей от перегрузок и токов короткого замыкания, в том числе для защиты при пуске и остановке асинхронных электродвигателей с короткозамкнутым ротором [c.222]
На схемах всем элементам одного аппарата дают одинаковое буквенное обозначение, которое указывает на основную функцию, выполняемую этим аппаратом, например РВ — реле времени РН — реле напряжения Л — линейный контактор В и Я — контакторы направления вперед и назад и т. п. В качестве примера на рис. 31 показана схема пуска асинхронного электродвигателя с короткозамкнутым ротором. На схеме буквой Л обозначены катушка пускателя, его главные контакты в цепи электродвига- [c.73]
Управление в функции времени показано на схеме включения асинхронного электродвигателя с короткозамкнутым ротором (рис. 33, а). Поскольку пуск одного и того же двигателя при одинаковой нагрузке происходит за одно и то же время, для автоматизации процесса пуска используют реле времени с определенной выдержкой времени. При нажатии на кнопку Я (пуск) включается линейный контактор Л, который своими главными контактами включает электродвигатель через сопротивление R. Параллельно катушке контактора Л включена катушка реле времени РУ (которое называют реле ускорения). По истечении заданной выдержки времени контакт РУ замыкается и включает катушку контактора ускорения У, главные контакты которого шунтируют сопротивление R, и двигатель включается на полное напряжение. [c.77]
33, а). Поскольку пуск одного и того же двигателя при одинаковой нагрузке происходит за одно и то же время, для автоматизации процесса пуска используют реле времени с определенной выдержкой времени. При нажатии на кнопку Я (пуск) включается линейный контактор Л, который своими главными контактами включает электродвигатель через сопротивление R. Параллельно катушке контактора Л включена катушка реле времени РУ (которое называют реле ускорения). По истечении заданной выдержки времени контакт РУ замыкается и включает катушку контактора ускорения У, главные контакты которого шунтируют сопротивление R, и двигатель включается на полное напряжение. [c.77]
Привод агрегатов этой серии осуществляется от двухполюсных асинхронных электродвигателей с короткозамкнутым ротором. Электродвигатели устойчивы к воздействию короткого замыкания и поэтому не требуют никакой внешней защиты.
Для пуска насоса необходимо, чтобы по крайней мере нижняя секция его была полностью погружена в воду. Число секций напорного трубопровода и приводного вала зависит от глубины погружения насоса. Насос приводится в действие асинхронным электродвигателем с короткозамкнутым ротором. Двигатель соединяется с приводным валом насоса эластичной муфтой. Направление вращения вала против часовой стрелки, если смотреть на агрегат сверху. [c.98]
Число секций напорного трубопровода и приводного вала зависит от глубины погружения насоса. Насос приводится в действие асинхронным электродвигателем с короткозамкнутым ротором. Двигатель соединяется с приводным валом насоса эластичной муфтой. Направление вращения вала против часовой стрелки, если смотреть на агрегат сверху. [c.98]
На рис. 126 показан асинхронный электродвигатель с короткозамкнутым ротором в разобранном виде. Двигатель состоит из двух основных узлов неподвижного статора 7 и подвижного ротора 2. [c.232]
Асинхронные короткозамкнутые и синхронные электродвигатели. При небольших мощностях (0,5—12 кет) и при отсутствии необходимости регулирования числа оборотов обычно применяются асинхронные электродвигатели с короткозамкнутым ротором. Для пуска короткозамкнутого двигателя требуется только прямое подключение его к сети через рубильники, пусковые ящики или магнитные пускатели, управляемые от кнопочной станции. [c. 144]
144]
Асинхронные электродвигатели трехфазного тока (насосные станции в СССР работают почти исключительно на трехфазном токе) можно применять с короткозамкнутым и фазовым ротором. Первый тип электродвигателя в последнее время нашел широкое распространение, так как запуск его осуществляется непосредственным подключением к сети при автоматизации пуска двигатель можно включать и выключать на расстоянии (дистанционное управление). К тому же электродвигатель е короткозамкнутым ротором меньше по габаритам и значительно дешевле двигателей других типов.
Благодаря простоте и экономичности этот метод широко применяется в компрессорах с асинхронными электродвигателями с короткозамкнутым ротором мощностью до 100 кВт. [c.211]
Подключение трехфазных асинхронных электродвигателей с короткозамкнутым ротором. Эти двигатели выпускаются промышленностью на напряжение 380/220 или 220/127 в. Конструкцией предусматривается возможность переключения обмоток двигателя на рабочее напряжение, соответствующее сети. Включение обмоток по схеме треугольник (А) всегда соответствует меньшему напряжению сети из указанных в паспорте двигателя, а включение по схеме звезда (л)— большему. [c.125]
Конструкцией предусматривается возможность переключения обмоток двигателя на рабочее напряжение, соответствующее сети. Включение обмоток по схеме треугольник (А) всегда соответствует меньшему напряжению сети из указанных в паспорте двигателя, а включение по схеме звезда (л)— большему. [c.125]
Более широкое применение нашел способ герметизации электродвигателей по внутреннему диаметру статора фиг. 21, а, так как в этом случае активные части статора отделены от рабочей среды, чем и обеспечивается их надежная защита. Наиболее просто герметизация по внутреннему диаметру статора обеспечивается у асинхронных электродвигателей с короткозамкнутым ротором за счет постановки экранирующей гильзы, поэтому такие электродвигатели уже нашли широкое применение при разработке герметических машин и аппаратов. [c.52]
Асинхронные электродвигатели с короткозамкнутыми роторами применяются для компрессоров с мощностями от самой малой до 2200 кет. Однака для мощностей до 40—50 кет эти двигатели являются наиболее рациональными. [c.142]
[c.142]
Пуск в ход асинхронных электродвигателей с короткозамкнутым ротором может быть осуществлен от полного или от пониженного напряжения сети. [c.27]
Примечания. I. Нормативы приведены для асинхронных электродвигателей с короткозамкнутым ротором нормального исполнения напряжением до 660 В включительно. Для определения трудоемкости одного ремонта и времени простоя электрических машин различных конструкций введены следующие коэффициенты для электрических машин (электродвигателей и генераторов) с частотой вращения 3000 об/мин — 0,8 1500 — 1,0 1000— 1,1 750 —1,2 600— 1,4 500 и ниже —1,5 коллекторных машин постоянного н переменного тока — 1,8 синхронных электродвигателей — 1,2 электродвигателей с фазным ротором, взрывозащищенных, крановых, погружных и многоскоростных — 1,3 электрических машин напряжением 0,66—3,3 кВ — 1,7 6,6 кВ, 10 кВ —2,1. [c.130]
Существуют следующие способы пуска асинхронных электродвигателей с короткозамкнутым ротором и синхронных электродвигателей с пусковой короткозамкнутой клеткой [c. 149]
149]
Во взрывоопасных наружных установках класса В-1г рекомендуется установка закрытых асинхронных электродвигателей в любом взрывозащищенном исполнении, соответствующем категориям и группам данных взрывоопасных смесей. Допускается также применение взрывонезащищенных асинхронных электродвигателей с короткозамкнутым ротором, пригодных для установки вне зданий (на открытом воздухе). [c.127]
Тихоходные мапшны барабанного тина (грануляторы, сушилки, печи и т. п.) часто приводят от электродвигателя через редукторы и зубчатую передачу, гс ик.овое колесо которой связано с барабаном. Если не требуется изменение частоты вращения барабана во время работы, используют асинхронные электродвигатели с короткозамкнутым ротором. Направление вращения вепцового зубчатого колеса должно обеспечивать разгрузку опорных станций от составляющей окружного усилия. При значительных габаритах машины венцоЕое колесо выполняют из двух частей и кренят к барабану упругими связями (см. гл. 12, 2), что обеспечивает плавность работы зубчатой передачи и удовлетворительную работу футеровки при температурной дефорлгации корпуса. [c.138]
гл. 12, 2), что обеспечивает плавность работы зубчатой передачи и удовлетворительную работу футеровки при температурной дефорлгации корпуса. [c.138]
Для барабанных машин перспективен дугостаторный электрический привод — современный безредукторный привод, позволяющий плавно регулировать частоту вращения барабана. Он представляет собой асинхронный электродвигатель с короткозамкнутым ротором. Функцию последнего выполняет сварной, бандаж, жестко связанный с барабаном, во внешние пазы которого уложены алюминиевые стержни статор имеет форму дуги с центральным углом менее 90°, что позволяет уменьшить число пар полюсов и частоту вращения ротора. Частоту враш,ения регулируют изменением частоты напряжения двигатель,в этом случае имеет преобразователь частоты на тиристорах с независимым регулированием выходных частоты и напряжения. [c.138]
Электронасосы типа ОМПВ представляют собой погружной агрегат моноблочного типа, состоящий из встроенного герметизированного водозаполненного асинхронного электродвигателя с короткозамкнутым ротором и насосной части. [c.770]
[c.770]
Магнитные пускатели иредназначены для дистанционного управления трехфазными асинхронными электродвигателями с короткозамкнутым ротором и другими ириемниками энергии. Включение магнитных пускателей может производиться вручную с помощью кнопочного поста и автоматически с помощью датчиков автоматики неносредственно или через промежуточные реле с помощью блок-контактов других пускателей. Отключение пускателей производится вручную или автоматически, ири аварийных режимах с помощью тепловых реле или реле максимального тока, нри отключе- [c.815]
В приводах для аппаратов с перемешивающими устройствами применяются асинхронные электродвигатели с короткозамкнутым ротором. В пусковой период при сильных перегрузках электродвигателей вследствие увеличения силы тока происходит интенсивное тепловыделение в обмотках. При длительном пусковом периоде в этом случае может выйти из строя изоляция и перегореть обмотка двигателя. Допускаемое время пускового периода зависит от типа двигателя, класса изоляции и теплового состояния двигателя перед пуском. Для трехфазных асинхронных двигателей серии А02 и BAO мощностью от 0,6 до 100 кВт при классе изоляции не ниже В для пуска двигателя в на-грето состоянии (илн при двукратном пуске в холодном состоянии) допускаемая продолжительность пускового периода Тдоп = 10 с [6]. [c.245]
Для трехфазных асинхронных двигателей серии А02 и BAO мощностью от 0,6 до 100 кВт при классе изоляции не ниже В для пуска двигателя в на-грето состоянии (илн при двукратном пуске в холодном состоянии) допускаемая продолжительность пускового периода Тдоп = 10 с [6]. [c.245]
Асинхронные электродвигатели с короткозамкнутым ротором выпускают мощ ностью от 0,6 до 125 квт. Такие электродвигатели выполняют в чугунном или алю миниевом корпусе с соответствующим различием в весе. Для привода компрессоро при пуске под нагрузкой в р име автоматической работы применяют электродви гатели с повышенным пусковым моментом, имеющие отношение начального пуско вого момента к номинальному 1,7—2,0. При переменной нагрузке компрессорО применяют также многоскоростные электродвигатели с переключением числа па полюсов и соответствующим изменением числа оборотов. [c.260]
Привод циркуляционных насосов ТР серии 200 осущ е-ствляется от двух или четырехполюсных асинхронных электродвигателей с короткозамкнутым ротором. Электродвигатели с одной ступенью частоты вращ,ения закрытого исполнения с поверхностным обдувом и подшипником со стороны привода могут иметь либо однофазную, либо трехфазную схему подключения к сети. [c.343]
Электродвигатели с одной ступенью частоты вращ,ения закрытого исполнения с поверхностным обдувом и подшипником со стороны привода могут иметь либо однофазную, либо трехфазную схему подключения к сети. [c.343]
Д—асинхронный электродвигатель с короткозамкнутым ротором КВО, J B3 —путевые микровыключатели МП 1101 открытия и закрытия KBI, —дополнительные путевые микровыключатели МП 1101 ВМО, BjM3 —моментные микровыключатели МП 1101 открытия и закрытия О, 3 —магнитные пускатели открытия и закрытия ЛО, ЛЗ, ЛМ —сигнальные лампы Открыто , Закрыто и Муфта КО, КЗ, КС — кнопки управления Открыто , Закрыто и Стоп П —потенциометр ППЗ—20 (20 кОм) Яр —предохранитель Д—автомат J—4—контакты микровыключателей. [c.85]
Продолжительность простоя в ремонте и трудозатраты на ремонт асинхронных электродвигателей с короткозамкнутых ротором нормального исполнения приведены в таблице- Для электродвигателей с фазным ротором, взрывозащищенных и крановых нормативы простоя в ремонте и трудозатраты на трудзатраты на ремонт увеличиваются в 1,3 раза, для двигателей напряжением более 1000 в — в 1,2 по сравнению с аналогичными двигателями напряжением менее 1000 в. [c.136]
[c.136]
Асинхронные электродвигатели являются электрическими машр1 нами переменного тока и состоят из неподвижной части — статора и вращающейся части — ротора, на которых расположены обмотки. Асинхронный электродвигатель может быть с фазным илн с короткозамкнутым ротором. У электродвигателей с фазным ротором обмотки последнего выведены на кольца, расположенные на валу машины, и допускают присоединение дополнительных регулируемых сопротивлений. Сопротивления эти при пуске электродвигателя постепенно выводятся, после чего все три фазы замыкаются накоротко специальным приспособлением — короткозамы-кателем. Электродвигатели с короткозамкнутым ротором изготовляют с обмоткой, заранее замкнутой накоротко. [c.24]
Асинхронный электродвигатель переменного тока
Электродвигатель предназначен для преобразования электрической энергии в механическую энергию. Это – одно из самых важных электротехнических устройств, без которого немыслима жизнь современного человечества.
Электродвигатель постоянного тока: принцип работы
Если проводник с током поместить в магнитное поле, то он придет в движение. Это продемонстрировал в 1821 году Майкл Фарадей, потом этот принцип был положен в основу работы электродвигателя.
Если поместить рамку с током в поле постоянного магнита, то на нее будет действовать сила, поворачивая вокруг оси вращения. Движение будет осуществляться до тех пор, пока система не придет в равновесие. В этот момент нужно изменить полярность тока в рамке, и движение продолжится. Постоянно меняя полярность тока в рамке, можно получить ее непрерывное вращение. Для этого ток в нее подается через контактные пластины на валу, называемые коллектором, соединенный с источником питания через подпружиненные щетки. При вращении пластины коллектора получают питание то от положительного полюса источника, то от отрицательного.
Коллекторы современных двигателей постоянного тока имеют большое число выводов (ламелей), что позволяет им работать устойчивее и достигать больших скоростей вращения. Питание к ним подводится через графитовые или медно-графитовые щетки.
Питание к ним подводится через графитовые или медно-графитовые щетки.
Постоянные магниты, в силу непостоянства их магнитного потока, заменяют электромагнитами, обмотки которых располагают в неподвижной части двигателя, называемой статором. Вращающуюся же часть электродвигателя с обмоткой постоянного тока называют якорем.
Статор и якорь имеют сердечники для усиления электромагнитных свойств. Их изготавливают наборными из тонких металлических пластин, изолированных друг от друга специальным термостойким лаком. Это снижает потери на вихревые токи, нагревающие сердечники и снижающие коэффициент полезного действия двигателя. Сердечники имеют сложную форму. В них сделаны пазы, в которые укладываются обмотки.
Принцип работы асинхронного электродвигателя переменного тока
Переменный ток для электродвигателей удобен тем, что можно отказаться от коллекторных схем, изменяющих фазу тока в обмотке на валу двигателя, называемой уже не якорем, а ротором. На переменном токе она сама изменяется по синусоидальному закону. Но есть и сложность: магнитное поле статора тоже изменяется по синусоидальному закону. Поэтому обмотки статора разных фаз разделяется на несколько частей и располагаются в пространстве в определенном порядке.
На переменном токе она сама изменяется по синусоидальному закону. Но есть и сложность: магнитное поле статора тоже изменяется по синусоидальному закону. Поэтому обмотки статора разных фаз разделяется на несколько частей и располагаются в пространстве в определенном порядке.
Принцип работы двигателя переменного тока немного отличается от постоянного. Вращающееся по кругу магнитное поле статора создает магнитный поток, за счет которого в обмотке ротора создается ЭДС. Проводники обмотки замкнуты накоротко, поэтому по ним течет ток. Взаимодействие вращающегося магнитного поля статора с током в короткозамкнутом роторе приводит к его вращению.
При этом скорость, с которой вращается ротор меньше скорости вращения магнитного поля в статоре. Поэтому эти двигатели и называют асинхронными.
Асинхронный электродвигатель с короткозамкнутым роторомЕсли обмотки ротора выполнить не короткозамкнутыми, а вывести их концы на контактные кольца, то получится электродвигатель с фазным ротором. Включая в цепь ротора резисторы, можно регулировать скорость вращения. Это позволяет применять такие двигатели на кранах и экскаваторах. Все мощные асинхронные электродвигатели тоже имеют фазный ротор. Плавное или ступенчатое изменение величины сопротивления в цепи ротора во время пуска позволяет снизить пусковые токи и плавно разгонять приводимый во вращение агрегат.
Включая в цепь ротора резисторы, можно регулировать скорость вращения. Это позволяет применять такие двигатели на кранах и экскаваторах. Все мощные асинхронные электродвигатели тоже имеют фазный ротор. Плавное или ступенчатое изменение величины сопротивления в цепи ротора во время пуска позволяет снизить пусковые токи и плавно разгонять приводимый во вращение агрегат.
Принцип действия синхронного электродвигателя переменного тока
Как видно из названия, ротор этого электродвигателя вращается с той же скоростью, что и магнитное поле статора, подключенного к сети переменного тока. В ротор же через контактные кольца и щетки подается постоянный ток, называемый током возбуждения. Регулируя величину тока в роторе, можно менять режим работы электродвигателя.
При определенных параметрах возбуждения получается режим, когда синхронный двигатель начинает отдавать в сеть реактивную мощность. Это – полезное свойство, позволяющее отказаться от применения установок компенсации реактивной мощности на предприятиях, где работают такие двигатели.
Однофазные электродвигатели переменного тока
Самая распространенная конструкция однофазного электродвигателя включает в себя обмотку на статоре и последовательно соединенную с ней обмотку якоря. Соединение происходит через щетки и коллектор якоря с большим количеством ламелей. Обмотки расположены так, что при взаимодействии подключенной в данный момент к цепи обмотки якоря с магнитным полем статора создается вращающий момент. Якорь поворачивается, и подключенной оказывается следующая обмотка. За счет этого момент вращения всегда остается постоянным.
Другая конструкция использует ротор с короткозамкнутыми обмотками и две обмотки на статоре. Одна из них включается через конденсатор, создающий при работе электродвигателя сдвиг фаз между токами и напряжениями в обмотках. Получается некоторое подобие асинхронного электродвигателя, но работающего не на трех, а на двух «фазах».
Оцените качество статьи:
Преимущества и недостатки асинхронного двигателя
Подавляющее большинство электродвигателей, используемых в промышленности – асинхронные двигатели с короткозамкнутым ротором.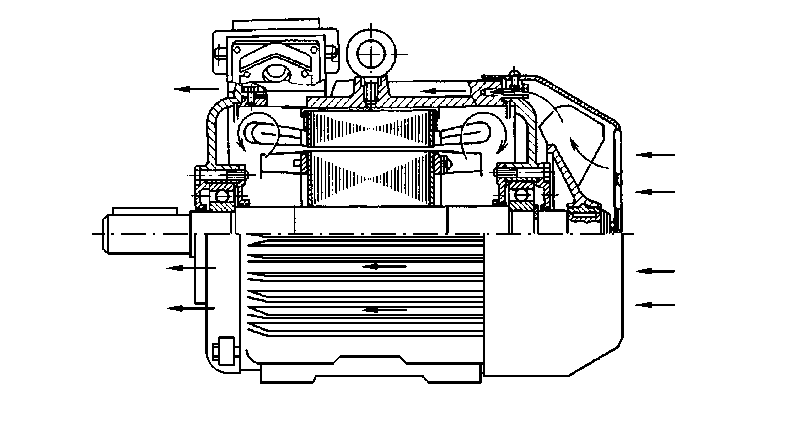 В новом оборудовании их доля составляет более 95%, остальное – серводвигатели, шаговые двигатели, щеточные двигатели постоянного тока и некоторые другие специфические виды приводов.
В новом оборудовании их доля составляет более 95%, остальное – серводвигатели, шаговые двигатели, щеточные двигатели постоянного тока и некоторые другие специфические виды приводов.
Преимущества асинхронного двигателя
Конструкция. По сравнению с другими типами электродвигателей асинхронный двигатель имеет наиболее простую конструкцию. С одной стороны это объясняется использованием стандартной трехфазной системы электроснабжения, с другой – принципом действия агрегата. Данная особенность обуславливает еще одно важное преимущество — невысокую цену асинхронных приводов. Среди двигателей разных типов одинаковой мощности асинхронный будет самым дешевым.
Подключение. Благодаря тому, что в стандартной трехфазной системе питания фазы сдвинуты на 120°, для формирования вращающегося поля не нужны дополнительные элементы и преобразования. Вращение поля внутри статора и, как следствие, вращение ротора обусловлены самой конструкцией асинхронного двигателя.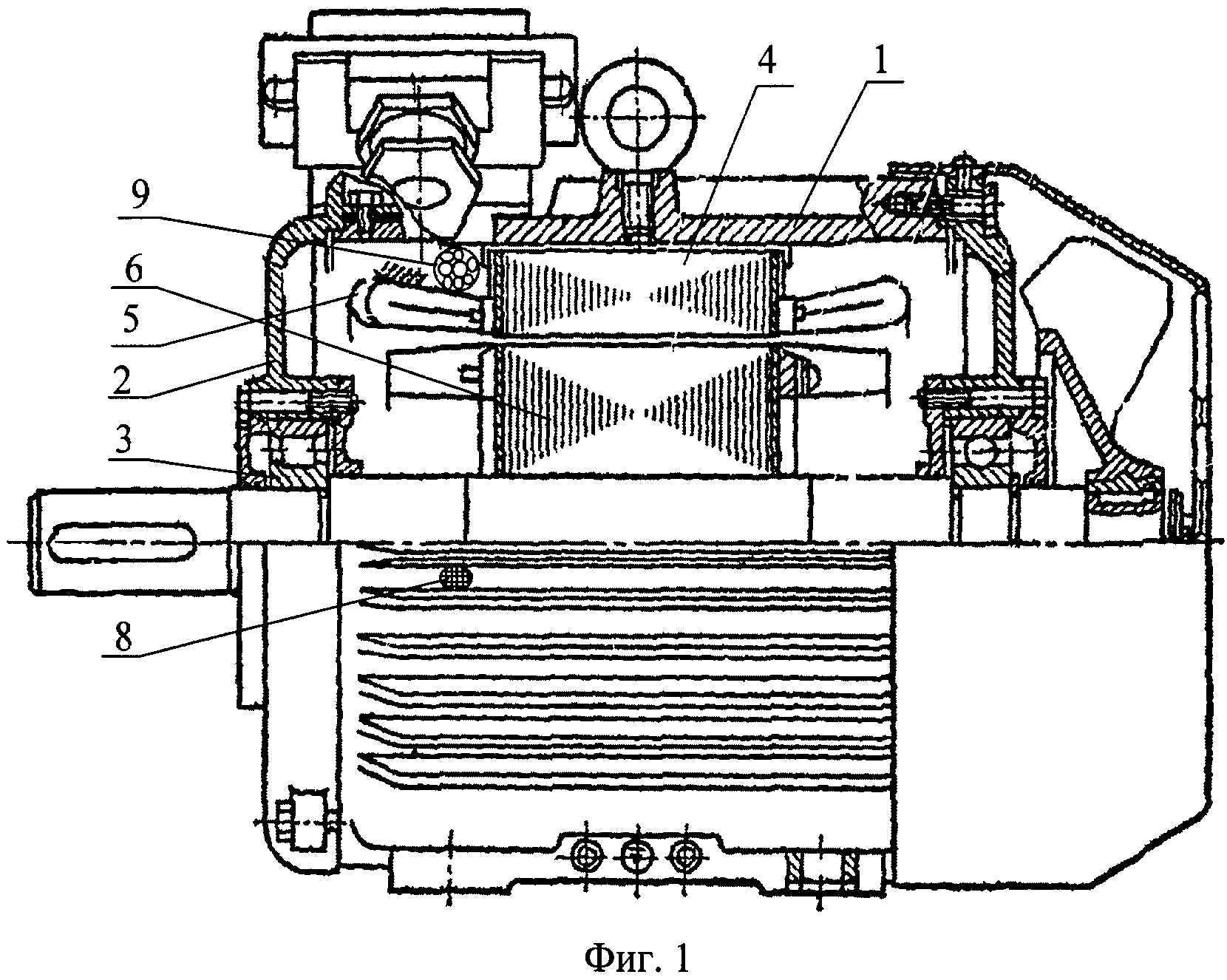 Достаточно обеспечить подачу напряжения через коммутационный аппарат (контактор или пускатель), и двигатель будет работать.
Достаточно обеспечить подачу напряжения через коммутационный аппарат (контактор или пускатель), и двигатель будет работать.
Эксплуатация. Затраты на эксплуатацию асинхронного электродвигателя крайне малы, а обслуживание не представляет никаких сложностей. Нужно лишь время от время проводить чистку от пыли и по необходимости протягивать контакты подключения. При правильной установке и эксплуатации двигателя замена подшипников производится раз в 15-20 лет.
Недостатки асинхронных двигателей
Скорость вращения ротора. Скорость вращения вала двигателя зависит от частоты питающей сети (стандартные значения в промышленности – 50 и 60 Гц) и от количества полюсов обмоток статора.
Это можно считать недостатком в том случае, когда необходимо в процессе работы менять скорость вращения. Для решения данной проблемы были разработаны многоскоростные асинхронные двигатели, у которых имеется возможность переключения обмоток.
Кроме того, в современном оборудовании управление скоростью реализуется за счет преобразователей частоты.
Скольжение. Эффект скольжения проявляется в том, что частота вращения ротора всегда будет меньше частоты вращения поля внутри статора. Это заложено в принцип работы асинхронного двигателя и отражено в его названии. Скольжение также зависит от механической нагрузки на валу.
При необходимости скольжение можно скомпенсировать, а скорость вращения сделать независимой от нагрузки при помощи преобразователя частоты.
Величина напряжения питания. В сырых и влажных помещениях, где действуют повышенные требования к электробезопасности, применение асинхронного электродвигателя может быть невозможным. Дело в том, что из-за конструктивных особенностей такие двигатели практически не производятся на напряжение питания менее 220 В. В таких случаях применяют приводы постоянного тока, рассчитанные на напряжение 48 В и менее, либо используют гидравлические или пневматические приводы.
Чувствительность к напряжению питания. При отклонении напряжения питания более чем на 5% параметры двигателя могут отличаться от номинальных, а сам агрегат может перегреваться. Кроме того, при понижении напряжения падает момент электродвигателя, который квадратически зависит от напряжения.
При использовании преобразователя частоты скорость вращения меняется путем изменения величины и частоты питающего напряжения. Принципиально, что отношение напряжения к частоте должно быть константой.
Пусковой ток. Большой пусковой ток – проблема асинхронных двигателей мощностью более 10 кВт. При пуске ток может превышать номинальный в 5-8 раз и длиться несколько секунд. Из-за этого негативного эффекта мощные двигатели нежелательно подключать напрямую.
Чаще всего для понижения пускового тока применяют схему «Звезда-Треугольник», устройства плавного пуска и преобразователи частоты. Также можно использовать асинхронные двигатели с фазным ротором.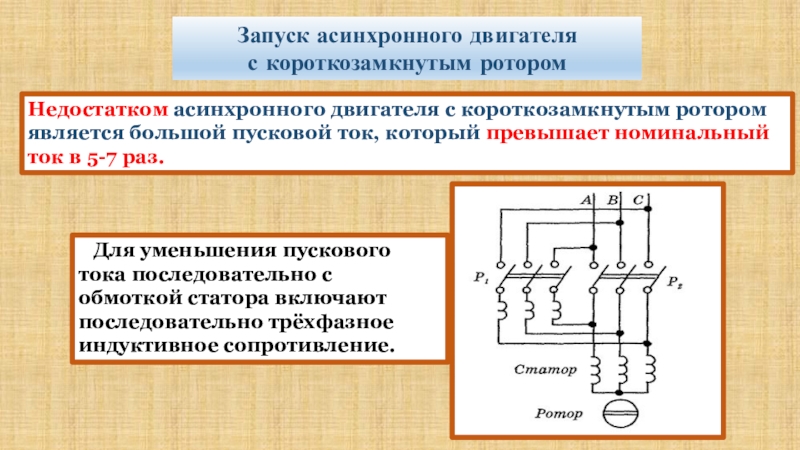
Пусковой момент. В силу электрических и механических переходных процессов в момент пуска двигатель обладает крайне низким КПД и большой реактивностью. Из-за низкого пускового момента привод может не справиться с началом вращения тяжелых механизмов. Этот же недостаток приводит к нагреву двигателя при пуске. Отсюда возникает другая проблема – ограничение количества пусков в единицу времени.
При использовании частотного преобразователя момент при пуске и на низких частотах может быть увеличен за счет повышения напряжения.
Вывод
Плюсы асинхронных двигателей значительно перевешивают минусы. В большинстве случаев недостатки компенсируются путем применения преобразователей частоты и других устройств пуска.
Другие полезные материалы:
Способы защиты электродвигателей
Когда не нужен плавный пуск
Когда нецелесообразно ремонтировать двигатель
Асинхронные двигатели – MirMarine
Асинхронными называются двигатели, у которых число оборотов ротора отстает от скорости вращения магнитного поля статора при прохождении в его обмотках трехфазного тока.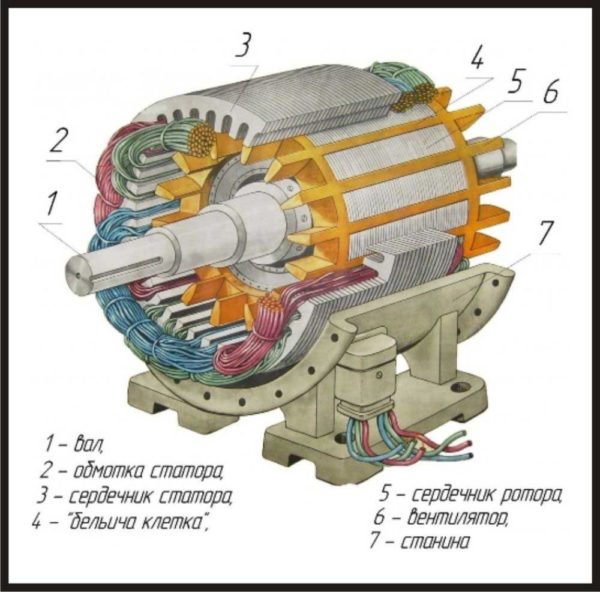 При прохождении в обмотках статора трехфазной машины трехфазного тока возникает вращающееся магнитное поле, под действием которого в роторе индуктируется электрический ток. В результате взаимодействия вращающегося магнитного поля статора стоками, индуктируемыми в проводниках ротора, возникает механическое усилие, действующее на проводник с током, которое и создает вращающий момент, приводящий в движение ротор. При этом число оборотов ротора у асинхронного двигателя всегда меньше числа оборотов вращающегося магнитного поля статора за счет скольжения ротора, которое у современных двигателей составляет примерно 2—5%.
При прохождении в обмотках статора трехфазной машины трехфазного тока возникает вращающееся магнитное поле, под действием которого в роторе индуктируется электрический ток. В результате взаимодействия вращающегося магнитного поля статора стоками, индуктируемыми в проводниках ротора, возникает механическое усилие, действующее на проводник с током, которое и создает вращающий момент, приводящий в движение ротор. При этом число оборотов ротора у асинхронного двигателя всегда меньше числа оборотов вращающегося магнитного поля статора за счет скольжения ротора, которое у современных двигателей составляет примерно 2—5%.
Таким образом, асинхронный двигатель получает энергию, подводимую к ротору вращающимся магнитным потоком (индуктивно) в отличие от двигателей постоянного тока, у которых энергия подводится по проводам.
Асинхронные двигатели в отличие от синхронных возбуждаются переменным током.
Асинхронный двигатель, так же как и синхронный, состоит из двух основных частей: статора с фазными обмотками, по которым проходит трехфазный переменный ток, и ротора, ось которого уложена в подшипниках. Ротор может быть коротко-замкнутым и фазным (рис. 175).
Ротор может быть коротко-замкнутым и фазным (рис. 175).
Короткозамкнутый ротор(рис. 175, в) представляет из себя цилиндр, по окружности которого параллельно его оси расположены проводники, замкнутые между собой с обеих сторон ротора кольцами (в виде беличьего колеса).
Асинхронный двигатель с таким ротором называется короткозамкнутым. К недостаткам их относятся малый пусковой момент и большой ток в обмотках статора при пуске. Если хотят увеличить пусковой момент или уменьшить пусковой ток, применяют асинхронные двигатели с фазным ротором (рис. 175,г).
У этих двигателей на роторе размещают такую же обмотку, как и на статоре. При этом концы обмоток соединяют с контактными кольцами (рис. 175, д), расположенными на валу двигателя. Контактные кольца при помощи щеток соединяются с пусковым реостатом. Для пуска двигателя в питающую сеть включают статор, после чего постепенно выводят из цепи ротора сопротивление пускового реостата. Когда двигатель пущен в ход, контактные кольца при помощи особых приспособлений замыкаются накоротко, а щетки поднимаются над кольцами. Остановка электродвигателя производится простым выключением рубильника. После остановки двигателя необходимо опустить щетки и разомкнуть контактные кольца. На рис. 176 показан продольный разрез асинхронного двигателя с фазным ротором. На валу 1 двигателя имеется механизм для замыкания контактных колец 8 и подъема щеток ручкой 7. В корпусе 6 статора помещена обмотка 5, уложенная в пазы 4 стали статора. В пазах 2 стали ротора лежит обмотка 3 ротора.
Когда двигатель пущен в ход, контактные кольца при помощи особых приспособлений замыкаются накоротко, а щетки поднимаются над кольцами. Остановка электродвигателя производится простым выключением рубильника. После остановки двигателя необходимо опустить щетки и разомкнуть контактные кольца. На рис. 176 показан продольный разрез асинхронного двигателя с фазным ротором. На валу 1 двигателя имеется механизм для замыкания контактных колец 8 и подъема щеток ручкой 7. В корпусе 6 статора помещена обмотка 5, уложенная в пазы 4 стали статора. В пазах 2 стали ротора лежит обмотка 3 ротора.
Пуск в ход электродвигателя с короткозамкнутым ротором может быть осуществлен непосредственным включением рубильника на полное рабочее напряжение сети (способ прямого пуска.) Однако вследствие резкого возрастания индуктируемой э. д. с. и величины пускового тока напряжение в сети в пусковой момент снижается, что отрицательно сказывается на работе приводного двигателя и других потребителей, питающихся от этой сети. В случае большой величины пускового тока, для его уменьшения асинхронные двигатели с короткозамкнутым ротором обычно пускают двумя способами: переключением обмоток статора в момент пуска со звезды на треугольник, если обмотки статора при нормальной работе электродвигателя соединены треугольником или включением электродвигателя через пусковое сопротивление (или автотрансформатор) в цепи статора.
В случае большой величины пускового тока, для его уменьшения асинхронные двигатели с короткозамкнутым ротором обычно пускают двумя способами: переключением обмоток статора в момент пуска со звезды на треугольник, если обмотки статора при нормальной работе электродвигателя соединены треугольником или включением электродвигателя через пусковое сопротивление (или автотрансформатор) в цепи статора.
Остановка электродвигателя производится выключением рубильника. После остановки электродвигателя пусковой реостат или автотрансформатор полностью вводится. Скорость вращения асинхронных двигателей регулируют, изменяя сопротивление реостата, включенного в цепь ротора (у электродвигателей с фазным ротором) и переключением статорных обмоток для изменения числа пар полюсов (у электродвигателей с коротко-замкнутым ротором).
Изменение направления вращения асинхронных электродвигателей достигается изменением направления вращающегося магнитного поля статора путем переключения любых двух из трех фаз обмотки статора (с помощью проводов, соединяющих зажимы статорной обмотки с сетью) при помощи обычного двухполюсного переключателя.
Асинхронные двигатели
- просты по конструкции
- обладают по сравнению с двигателями постоянного тока меньшими габаритами и весом, вследствие чего он значительно дешевле
- более надежны в эксплуатации
- требуют меньшего внимания при обслуживании из-за отсутствия у них вращающегося коллектора и щеточного аппарата
- обладают более высоким к. п. д.
- аппаратура управления ими значительно проще и дешевле, чем у двигателей постоянного тока
- Асинхронные двигатели работают без искрообразования, которое возможно в машинах постоянного тока с нарушенной коммутацией, поэтому они более безопасны в пожарном отношении.
Перечисленными основными преимуществами асинхронных двигателей объясняется современная тенденция повсеместного внедрения переменного тока на морских судах. Следует отметить, что в промышленности асинхронные двигатели давно завоевали господствующее положение по сравнению с другими типами электродвигателей. Асинхронные двигатели строятся мощностью от долей киловатта до многих тысяч киловатт. На судах морского флота в основном применяются асинхронные двигатели с короткозамкнутым ротором, которые выпускаются в водозащищенном и брызгозащищенном исполнении и рассчитаны на напряжение 380/220 в.
Асинхронные двигатели строятся мощностью от долей киловатта до многих тысяч киловатт. На судах морского флота в основном применяются асинхронные двигатели с короткозамкнутым ротором, которые выпускаются в водозащищенном и брызгозащищенном исполнении и рассчитаны на напряжение 380/220 в.
Похожие статьи
Устройство асинхронного двигателя. Принцип работы
Автор Alexey На чтение 7 мин. Просмотров 745 Опубликовано Обновлено
Без электрических двигателей совершенно нереально представить себе функционирование современной жизни. Наиболее популярным и востребованным является асинхронный трёхфазный асинхронный электродвигатель с короткозамкнутым ротором в виду его простой и надёжной конструкции, которая обеспечивает отличные механические характеристики. Главным назначением асинхронных двигателей является преобразование переменного электрического тока в механическую энергию.
Главным назначением асинхронных двигателей является преобразование переменного электрического тока в механическую энергию.
Внутреннее устройство электромотора и его принцип работы вызывает резонный интерес, как в познавательном плане, так и с практической точки зрения — знание конструктивных особенностей асинхронного двигателя, влияющих на его параметры, поможет при выборе электродвигателя, его эксплуатации и обслуживании. Подробнее о теории работы асинхронного двигателя я объясняю и описываю в статье Принцип работы асинхронного электрического двигателя
Назначение основных частей трехфазных асиннхронных двигателей
В любом двигателе есть две основные составляющие – неподвижный статор, закрепляемый на станине, и вращающийся ротор, через вал которого осуществляется передача механической энергии.
В отношении электродвигателей и трансформаторов катушки с проводом принято называть обмотками из-за технологических процессов при их создании.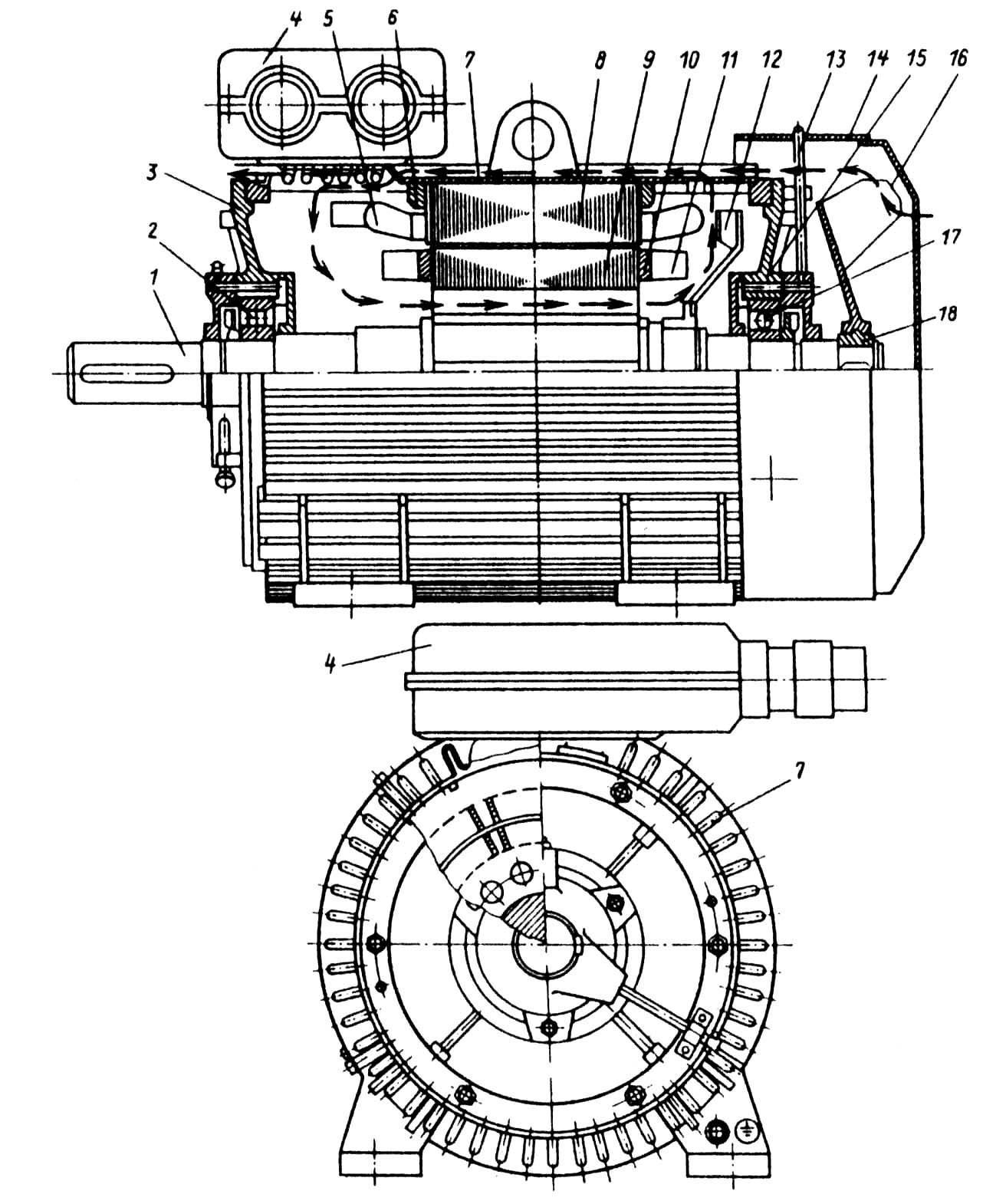 Магнитопровод статора (сердечника), в котором укладываются обмотки, помещается в защитный металлический кожух, служащий также теплоотводом с ребристой поверхностью.
Магнитопровод статора (сердечника), в котором укладываются обмотки, помещается в защитный металлический кожух, служащий также теплоотводом с ребристой поверхностью.
Ротор нигде не соприкасается со статором и вращается на подшипниках, закрепляемых на торцевых крышках, или отдельно на станине. Торцевые крышки крепятся к кожуху при помощи болтов. Механическая энергия снимается с вала в передней части двигателя при помощи шкива, шестерни или муфты.
Схема устройства асинхронного трёхфазного двигателяНа вал ротора с тыльной стороны мотора крепится защищённый кожухом вентилятор для обдува ребристого корпуса, на котором находится клеммник подключения вводного кабеля, питающего электромотор.
Виды асинхронных электродвигателей
Узнав кратко, из чего состоит большинство электродвигателей, можно перейти к рассмотрению асинхронных двигателей. Описание электромагнитных взаимодействий, происходящих в асинхронном двигателе, не входит в рамки данной статьи, но коротко можно сказать, что в статоре создаётся вращающееся магнитное поле, взаимодействующее с полем ротора.
Асинхронный – означает, что вал ротора не вращается синхронно с вращающимся магнитным полем статора. Широко используются две разновидности данного типа трехфазных электромоторов, которые имеют такие официальные названия:
- асинхронный двигатель с короткозамкнутым ротором;
- асинхронный двигатель с фазным ротором.
Конструкции статора данных типов электродвигателей являются идентичными, а различия заключаются в конструктивном исполнении ротора.
Устройство статора асинхронных двигателей
Для недопущения образования вихревых токов, возникающих при переменном электромагнитном поле, магнитопровод статора набирают из одинаковых колец специальной электротехнической стали методом шихтовки (от немецкого Schicht — набор). В кольцах с внутренней стороны на специальном оборудовании выбивают пазы сложной формы.
а) статор в сборе с обмотками , б) магнитопровод и кольцо эл. стали
сталиПри укладке колец в пакет статора добиваются полного совпадения данных пазов, предназначенных для укладки обмоток.
Набор сложенных пластинчатых колец фиксируют при помощи специальных скоб и запрессовывают в защитный кожух двигателя, который также несёт механические нагрузки и служит для охлаждения. Обмотки статора мотают на специальном станке в виде рамок, укладываемых в определённые пазы статорного магнитопровода.
Перед укладкой обмотки паз изолируют при помощи диэлектрической прокладки.
диэлектрическая прокладка в пазуРабочие осторожно помещают рамки обмоток в пазы, не допуская повреждения эмалированной изоляции проводов.
рамки статораВ зависимости от конструктивных особенностей статора, в один паз может быть помещено несколько рамок – в этом случае их также изолируют друг от друга диэлектрическими прокладками
продолговатый клин из стекловолокнаУложенные обмотки в каждом пазу фиксируют при помощи специальной вставки в форме продолговатого клина из стекловолокна.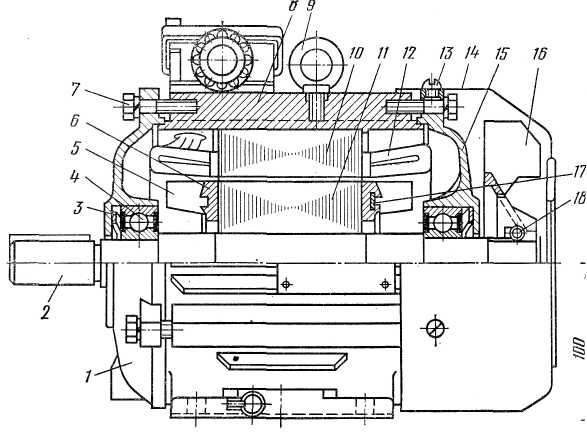
Соединения обмоток статора
Каждую уложенную в пазы обмотку проверяют на обрыв, пробой и межвитковое замыкание. После этого выводы рамок соединяют в фазные обмотки, в зависимости требуемого от количества пар полюсов.
Асинхронные электродвигатели с одной парой полюсов вращающегося магнитного поля имеют максимально возможные для частоты 50 Гц обороты идеального холостого хода – 3000 в минуту.
соединения проводов при помощи сваркиПри помощи параллельных и последовательных подключений рамок обмоток определённым способом создают дополнительные полюсы вращающегося электромагнитного поля для уменьшения оборотов вала ротора. Все электрические соединения проводов обмоток выполняют при помощи сварки, реже – пайки.
Таким способом формируют фазные обмотки, геометрические оси которых располагаются под углом 120º. Выводы от фазных обмоток выводят в коробку подключения. По другому данный клеммник называется блоком распределения начал обмоток (БРНО). Петли обмоток, выходящие из пазов магнитопровода статора, называют лобовыми обмоточными частями.
Петли обмоток, выходящие из пазов магнитопровода статора, называют лобовыми обмоточными частями.
Провода обмоток в лобовой части обматывают бандажными лентами для механической фиксации.
обмотка монтажной лентой проводовПосле выполнения всех работ, статор погружают в лак, который высыхая, придает конструкции электрическую и дополнительную механическую прочность.
Устройство короткозамкнутого ротора
Короткозамкнутый ротор также состоит их шихтованных колец, в которых по внешней окружности пробивают пазы для укладки короткозамкнутых витков, которые делают из меди (для мощных двигателей более 50 кВт) и алюминия.
С торцов ротора данные витки замыкаются накоротко при помощи колец (медных или алюминиевых).
Принципиальная схема короткозамкнутого ротораВизуально обмотка короткозамкнутого ротора без магнитопровода похожа на беличье колесо.
В данных витках благодаря трансформации индуцируется ток, возбуждающий электромагнитное поле ротора, взаимодействующее с вращающимся полем статора. Для упрощения процесса изготовления витков сложной формы используют заливку расплавленного алюминия в пазы ротора.
От формы поперечного сечения короткозамкнутых витков ротора зависит такая механическая характеристика асинхронного двигателя как начальный вращательный момент запуска, увеличения которого добиваются путём добавления дополнительных пусковых витков.
Используя особенности распределения силовых линий электромагнитного поля, добиваются больших токов в пусковых обмотках ротора при запуске двигателя, которые уменьшаются при наборе оборотов. Вал ротора запрессовывается в магнитопровод по его оси. Замыкающие кольца часто имеют лопатки, которые выполняют функцию внутреннего вентилятора, обеспечивающего циркуляцию воздуха внутри электромотора.
Из-за того, что роторная электрическая цепь не контактирует с внешними цепями, не требуется контактных узлов, что делает асинхронный двигатель с короткозамкнутым ротором наиболее износоустойчивым по сравнению с другими типами электродвигателей.
Устройство фазного ротора
В пазах фазного ротора укладываются фазные обмотки, соединённые звездой, и подключённые к контактным кольцам, через которые осуществляется включение в регулирующую внешнюю цепь.
Асинхронный двигатель с фазным ротором, благодаря добавлению обмоток, в зависимости от внешней регулирующей цепи может использоваться:
- Для плавного запуска электродвигателя и уменьшения пусковых токов при помощи реостатов, подключённых к контактным кольцам. По мере запуска двигателя сопротивление реостатов уменьшается одновременно для всех фаз ротора. При наборе оборотов реостаты отключаются и кольца замыкаются.
- Для поддержания постоянных оборотов двигателя при включении в цепи фазных обмоток ротора дросселей, реактивное сопротивление которых увеличивается с увеличением оборотов, что уменьшает магнитное поле ротора и вращательный момент;
- Для увеличения пускового момента на фазные обмотки подают постоянное или переменное напряжение в противофазе статору.
Характерные поломки асинхронных двигателей
От точности выполнения ротора и статора зависит воздушный магнитный зазор, увеличение которого негативно влияет на производительность и коэффициент полезного действия электродвигателя. Поэтому, стараются данный зазор максимально уменьшить.
поперечный разрез двигателяДля предотвращения вибраций и биений ротора, его тщательно центрируют перед помещением в статор. Износ подшипников, и в частности, выход из строя сепаратора шарикоподшипников, приводит к перекосу ротора и его трению об магнитопровод статора.
укладка обмоток в пазы ротораКак правило, после замены подшипников данные повреждения не имеют значительного влияния на работоспособность мотора, но увеличится вибрация из-за разбалансировки ротора.
Обмотки статора наиболее часто подвержены межвитковому замыканию, которое происходит из-за повреждения эмалевой изоляции проводов из-за перегрева. Можно самостоятельно прозвонить обмотки и даже выявить место пробоя между витками, но перемотать обмотки в кустарных условиях не представляется возможным, и при такой поломке двигатель нужно отдавать на перемотку.
Видео: устройство трехфазного асинхронного электродвигателя
Однофазный асинхронный двигатель
В однофазном двигателе используется две обмотки. Одна рабочая, другая стартова. Стартовая нужна для того, чтобы придать первоначальное вращение ротора, затем она отключается. Более подробно принцип работы такого двигателя, смотрите в видео ниже
тема урока АСИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ С КОРОТКОЗАМКНУТЫМ РОТОРОМ
тема урока «АСИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ С КОРОТКОЗАМКНУТЫМ РОТОРОМ»
ИСТОРИЯ СОЗДАНИЯ ЭЛЕКТРОДВИГАТЕЛЯ В 1821 г. Фарадей установил, что электрический ток, проходящий по проводнику, может заставить этот проводник совершать вращение вокруг магнита или вызывать вращение магнита вокруг проводника. Этот опыт доказал принципиальную возможность построения электродвигателя. В 1834 г. русский изобретатель Якоби построил и описал электродвигатель, который действовал на принципе притяжения и отталкивания между электромагнитами. Первый электродвигатель, построенный Якоби, развивал мощность около 15 Вт. В 1888 г. Доливо-Добровольский разработал трехфазную электрическую систему и запатентовал изобретение ротора с беличьей клеткой, той конструкции ротора асинхронного двигателя, которая сохранилась принципиально в том же виде и до настоящего времени.
КЛАССИФИКАЦИЯ ЭЛЕКТРИЧЕСКИХ МАШИН ЭЛЕКТРИЧЕСКИЕ МАШИНЫ ДВИГАТЕЛИ ПЕРЕМЕННОГО ТОКА АСИНХРОННЫЕ С КОРОТКОЗАМКНУТЫМ РОТОРОМ ПОСТОЯННОГО ТОКА СИНХРОННЫЕ С ФАЗНЫМ РОТОРОМ ГЕНЕРАТОРЫ
Двигатель – это электротехническое устройство, преобразующее электрическую энергию в механическую.
1 Двигатель переменного тока состоит из 2 -х основных частей: 1 СТАТОР – неподвижная часть двигателя; 2 РОТОР – подвижная часть, которая помещается в статоре и может свободно вращаться 2 У асинхронных электродвигателей частота вращения ротора не совпадает с частотой вращения магнитного поля статора (отстаёт). У синхронных двигателей эти частоты вращения совпадают.
УСТРОЙСТВО АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ 1 -станина, 2 -статор, 3 -обмотка статора, 4 -ротор, 5 -крылья вентиляционные, 6 -внутренняя крышка подшипника, 7 -подшипник, 8 -подшипниковый щит, 9 -наружная крышка подшипника, 10 -коробка выводов
УСТРОЙСТВО АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ
ПРИНЦИП ДЕЙСТВИЯ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ (макет двигателя)
ПРОМЫШЛЕННОЕ ПРОИЗВОДСТВО ЭЛЕКТРОДВИГАТЕЛЕЙ
СВОЙСТВА И ОБЛАСТЬ ПРИМЕНЕНИЯ АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ С КОРОТКОЗАМКНУТЫМ РОТОРОМ Электрические двигатели приводят в движение практически все промышленные механизмы, начиная от мощнейших прокатных станков до мелких приборов. Асинхронные двигатели являются основными преобразователями электрической энергии в механическую и составляют основу электропривода большинства механизмов. Около 50% потребляемой в мире электроэнергии приходится на долю именно этих электродвигателей. ПРЕИМУЩЕСТВА АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ КОРОТКОЗАМКНУТЫМ РОТОРОМ СЛЕДУЮЩИЕ: ◊ приблизительно постоянная скорость при разных нагрузках; ◊ возможность кратковременных механических перегрузок; ◊ простота конструкции; ◊ простота пуска и легкость его автоматизации; ◊ более высокие cos φ и КПД, чем у двигателей с фазным ротором. НЕДОСТАТКИ ЭЛЕКТРОДВИГАТЕЛЕЙ С КОРОТКОЗАМКНУТЫМ РОТОРОМ: ◊ затруднения в регулировании скорости вращения; ◊ большой пусковой ток; ◊ низкий cos φ при недогрузках. С
СХЕМА ВКЛЮЧЕНИЯ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ
ДОМАШНЕЕ ЗАДАНИЕ § 7. 1 стр. 169 – 172 + макет простейшего электродвигателя дополнительно § 38 стр. 173 – 176
ВОПРОСЫ ДЛЯ КОНТРОЛЯ 1. ОПРЕДЕЛЕНИЕ ЭЛЕКТРОДВИГАТЕЛЯ 2. КЛАССИФИКАЦИЯ ЭЛЕКТРИЧЕСКИХ МАШИН 3. УСТРОЙСТВО АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ 4. ОТЛИЧИЕ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ ОТ СИНХРОННОГО 5. ЭЛЕМЕНТЫ СХЕМЫ ВКЛЮЧЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ
Данный продукт является собственностью Учреждения образования «Гродненский государственный химикотехнологический профессиональный лицей» ptu [email protected] grodno. by Автор презентации: мастер производственного обучения, преподаватель спецтехнологии Лапыш О. В. [email protected] ru
Асинхронный двигатель | КСБ
Асинхронный двигатель имеет пассивный ротор, который закорочен постоянно (короткозамкнутый ротор) или временно (см. Ротор с контактным кольцом). Он может производить до нескольких мегаватт и чаще всего используется в качестве стандартного трехфазного двигателя в промышленных приложениях.
Магнитное поле в асинхронном двигателе создается током намагничивания, передаваемым через предоставленную электрическую энергию. Асинхронные двигатели характеризуются скольжением, т.е. е.зависящая от нагрузки разница между скоростью вращения ротора и скоростью вращающегося поля питающего напряжения.
Ротор представляет собой металлическую клетку с осевыми стержнями, расположенными симметрично по кругу и прикрепленными к кольцу короткого замыкания (концевому кольцу) на каждом конце.
Статор состоит из распределенных катушек, которые индуцируют напряжение в стержнях ротора (см. Индукция) посредством вращающегося магнитного поля. Это приводит к сильному протеканию тока в короткозамкнутых стержнях, который создает силу между ротором и статором в магнитном поле и приводит к электромагнитному взаимодействию, ответственному за асинхронизм.Асинхронные двигатели подвержены значительным потерям в статоре и роторе.
В двигателях с контактным ротором трехфазная обмотка ротора подключается к переменным резисторам, обычно используемым в качестве жидкостных пускателей, через контактные кольца. Такая конструкция обеспечивает плавный процесс пуска, который не создает ударной нагрузки на сеть электропитания и позволяет в определенной степени изменять скорость. Однако это также приводит к значительным потерям мощности.
Обмотки ротора с короткозамкнутым ротором обычно состоят из одно- или двухпроводных шин, закороченных на концах кольцевым проводником.Роторы с короткозамкнутым ротором очень просты по конструкции, надежны и не требуют обслуживания. См. Рис.1 Асинхронный двигатель
Рис.1 Асинхронный двигатель: Асинхронный двигатель в разрезе
В отношении контакта с водой различают двигатели с сухим ротором, погружные двигатели и двигатели с мокрым ротором. См. Рис.2 Асинхронный двигатель
| Внутреннее смачивание | Внешнее смачивание | ||
|---|---|---|---|
| Ротор | Обмотка | Сухой корпус | Мокрый корпус (погружной двигатель) |
| Сухой | Сухой | Сухой двигатель (с защитой от проникновения воды или без нее) | Сухой (заполненный воздухом) погружной двигатель |
| Влажный (двигатель с мокрым ротором) | Сухой двигатель (герметичный двигатель) | Двигатель с мокрым ротором насоса с мокрым ротором | Полностью погружной (заполненный жидкостью) двигатель |
Рис.2 Асинхронный двигатель: Обозначение асинхронных двигателей в зависимости от влажности
Сухой двигатель имеет различные типы защиты от проникновения воды (см. Тип защиты).
Погружной двигатель частично или полностью погружен в воду и обычно устанавливается в вертикальном положении. Тепло, вырабатываемое двигателем, передается непосредственно окружающей обрабатываемой жидкости. Его отличительной особенностью является корпус двигателя, который смачивается снаружи (см. Погружной электронасос).Внутреннее смачивание и глубина погружения отличают погружные двигатели с масляным или воздушным наполнением для малых и средних глубин погружения (погружные насосы для сточных вод) от полностью погружных двигателей.
См. Рис. 3, 4 Насос для сточных вод
Полностью погружные двигатели смачиваются жидкостью, находящейся внутри и снаружи. Они рассчитаны на любую глубину погружения и, прежде всего, используются в скважинах (см. Погружные скважинные насосы), поэтому они имеют небольшой диаметр и относительно длинные.Полностью погружные двигатели могут быть оснащены мокрой обмоткой статора (включая водонепроницаемую пластиковую изоляцию) или, в сочетании с корпусом, сухой обмоткой (см. Герметичный моторный насос).
Двигатель с мокрым ротором заполнен жидкостью и, в отличие от погружного двигателя, его корпус не смачивается снаружи. Он имеет подшипники с жидкостной смазкой (см. Подшипники скольжения) и вместе с насосом образует герметичный насосный агрегат (насос с мокрым ротором). Двигатель может быть оборудован мокрой обмоткой статора или, в сочетании с корпусом, сухой обмоткой, и часто является двигателем, который выбирают для циркуляционных насосов.
Мотор с короткозамкнутым ротором: простое, но полезное руководство
Как вы, возможно, знаете, электродвигатели – это устройства, преобразующие электрическую энергию в механическую, и в настоящее время они доминируют в современной промышленности. Они просты в использовании, имеют простой дизайн и бывают разных форм, что позволяет им добиться успеха практически в любой ситуации. Электродвигатели могут питаться от постоянного или переменного тока. В этой статье Linquip исследует конкретный двигатель переменного тока, известный как двигатель с короткозамкнутым ротором, который представляет собой особый тип асинхронного двигателя, который использует эффект электромагнитной индукции для преобразования электрического тока в энергию вращения.Прочтите, чтобы понять принципы работы двигателей с короткозамкнутым ротором, как они работают и для каких применений они используются.
Что такое двигатель с короткозамкнутым ротором?
Эти двигатели представляют собой тип асинхронных двигателей, которые используют электромагнетизм для создания движения. Это так называемые двигатели с короткозамкнутым ротором, потому что форма их ротора напоминает клетку. Две круглые торцевые крышки соединены стержнями ротора, на которые действует электромагнитное поле, создаваемое статором или внешним корпусом, состоящим из многослойных металлических листов и намотки проволоки.
Статор и ротор являются двумя основными частями любого асинхронного двигателя, а беличья клетка – это просто один из методов усиления эффекта электромагнитной индукции. Переменный ток, проходящий через статор, создает электромагнитное поле, которое колеблется с частотой переменного тока, которая вращается вокруг ротора, вызывая противоположные магнитные поля в стержнях ротора, что приводит к движению.
Как работает двигатель с короткозамкнутым ротором?
Двигатели с короткозамкнутым ротором работают так же, как и большинство других асинхронных двигателей, единственная разница между ними заключается в особом взаимодействии между ротором и статором.Эти двигатели максимизируют электромагнитную индукцию за счет использования стержней ротора для взаимодействия с электромагнитным полем статора. Статор обычно содержит обмотки из проволоки, по которым проходит переменный ток; этот ток изменяется синхронно с синусоидальным переменным, который затем изменяет направление тока в обмотках провода.
Когда ток колеблется, генерируемое электромагнитное поле будет следовать его примеру и в некоторых случаях заставит его вращаться с частотой, подобной частоте переменного тока.Это вращающееся электромагнитное поле создает противоположное напряжение и электромагнитное поле в стержнях ротора, тем самым толкая ротор, создавая вращательное движение.
Этот ротор не вращается с точной частотой переменного тока, поэтому двигатели с короткозамкнутым ротором, а также другие асинхронные двигатели считаются асинхронными. Всегда есть некоторая потеря между частотой переменного тока и частотой вращения вала, и это в первую очередь результат вращения ротора. Если бы ротор вращался с той же частотой, то величина силы, действующей на стержни ротора, была бы равна нулю, таким образом, не создавая движения.
Конструкция асинхронного двигателя с короткозамкнутым ротором
Детали, необходимые для конструкции двигателя с короткозамкнутым ротором, включают статор, ротор, вентилятор, подшипники. Статор состоит из механически и электрически разнесенной на 120 градусов трехфазной обмотки с металлическим корпусом и сердечником. Чтобы обеспечить путь с низким сопротивлением для потока, генерируемого переменным током, обмотка установлена на многослойном железном сердечнике.
Ротор преобразует электрическую энергию в механическую мощность. Вал, сердечник, короткозамкнутые медные шины являются частями ротора.Чтобы избежать гистерезиса и возникновения вихревых токов, приводящих к потере мощности, ротор имеет многослойное покрытие. И для предотвращения зазубрин проводники перекошены, что также помогает обеспечить хороший коэффициент трансформации. Вентилятор, прикрепленный к задней части ротора для теплообмена, помогает поддерживать заданную температуру двигателя. Для плавного вращения в двигателе предусмотрены подшипники.
Классификация асинхронных двигателей с короткозамкнутым ротором
Национальная ассоциация производителей электрооборудования в США и МЭК в Европе классифицировали конструкцию асинхронных двигателей с короткозамкнутым ротором на несколько классов в зависимости от их скоростных характеристик.Это классы A, B, C, D, E и F.
Конструкция класса A
- Нормальный пусковой момент.
- Нормальный пусковой ток.
- Низкое скольжение.
- В этом классе крутящий момент отрыва всегда составляет от 200 до 300 процентов крутящего момента при полной нагрузке и происходит при небольшом скольжении (менее 20 процентов).
- Для этого класса пусковой крутящий момент равен номинальному крутящему моменту для более крупных двигателей и составляет около 200 или более процентов от номинального крутящего момента для двигателей меньшего размера.
Конструкция класса B
- Нормальный пусковой момент
- Низкий пусковой ток
- Низкое скольжение
- Асинхронный двигатель этого класса производит примерно такой же пусковой момент, что и асинхронный двигатель класса A.
- Момент отрыва всегда больше или равен 200% номинального момента нагрузки. Но он меньше, чем у конструкции класса А, потому что имеет повышенное реактивное сопротивление ротора.
Класс C
- Высокий пусковой момент.
- Низкие пусковые токи.
- Низкое скольжение при полной нагрузке (менее 5%).
- Пусковой момент до 250% от крутящего момента при полной нагрузке соответствует этому классу конструкции.
- Момент отрыва ниже, чем у асинхронных двигателей класса А.
Конструкция класса D
- Двигатели этой конструкции класса имеют очень высокий пусковой крутящий момент (275 процентов или более от номинального крутящего момента).
- Низкий пусковой ток.
- Высокое скольжение при полной нагрузке.
- Опять же, в этом классе конструкции высокое сопротивление ротора смещает пиковый крутящий момент на очень низкую скорость.
- Даже при нулевой скорости (100-процентное скольжение) самый высокий крутящий момент может возникнуть в этом классе конструкции.
Класс E
- Очень низкий пусковой крутящий момент.
- Нормальный пусковой ток.
- Низкое скольжение.
- Для регулирования пускового тока используется компенсатор или резистивный пускатель.
Класс F
- Низкий пусковой крутящий момент, 1.25-кратный крутящий момент при полной нагрузке при подаче полного напряжения.
- Низкий пусковой ток
- Нормальное скольжение
Применение двигателя с короткозамкнутым ротором
Асинхронные двигатели с короткозамкнутым ротором обычно используются во многих промышленных приложениях. Они особенно подходят для приложений, в которых двигатель должен поддерживать постоянную скорость, самозапускаться или требовать минимального обслуживания.
Эти двигатели обычно используются в:
- Центробежных насосах
- Промышленных приводах (например.грамм. для запуска конвейерных лент)
- Большие воздуходувки и вентиляторы
- Станки
- Токарные станки и другое токарное оборудование
- Центробежные насосы, вентиляторы, воздуходувки и т. д.
- Приводные воздушные компрессоры, конвейеры, поршневые насосы, дробилки, смесители , большие холодильные машины и т. д.
- Пробивные прессы, ножницы, бульдозеры, малые подъемники и т. д.
Преимущества двигателя с короткозамкнутым ротором
Некоторые преимущества асинхронных двигателей с короткозамкнутым ротором:
- Простая и прочная конструкция
- Низкая начальные, а также затраты на техническое обслуживание
- Поддержание постоянной скорости
- Высокая перегрузочная способность
- Простое пусковое устройство
- Высокий коэффициент мощности
- Низкие потери меди в роторе
- Высокая эффективность преобразования электрической энергии в механическую (во время работы, не во время запуска)
- Маленький и легкий
- Есть лучшее регулирование температуры
- Взрывозащищенный
Двигатель с короткозамкнутым ротором Недостатки
Недостатки асинхронного двигателя с короткозамкнутым ротором следующие.
- Очень плохое регулирование скорости
- Хотя они энергоэффективны при работе с полным током нагрузки, они потребляют много энергии при запуске
- Они более чувствительны к колебаниям напряжения питания. Когда напряжение питания снижается, асинхронный двигатель потребляет больше тока. Во время скачков напряжения увеличение напряжения насыщает магнитные компоненты асинхронного двигателя с короткозамкнутым ротором
- У них высокий пусковой ток и плохой пусковой момент
Итак, это все, что вам нужно знать о двигателях с короткозамкнутым ротором и их применении в системе.Если вам понравилась статья в Linquip, не стесняйтесь делиться своим опытом в разделе комментариев. Есть вопросы, с которыми мы можем вам помочь? Зарегистрируйтесь на нашем сайте и получите профессиональные консультации наших специалистов.
Асинхронный двигатель с короткозамкнутым ротором – обзор
4.2.1 Создание сетки
В случае асинхронного двигателя с короткозамкнутым ротором геометрия является регулярной и периодической. Это было использовано в стратегии генерации сетки. Сетка была сформирована с использованием функции отображения, которая подразделяла каждую область двигателя.Области определены на Рисунке 4.2.1.
Рисунок 4.2.1. Топологические области асинхронного двигателя
Самая внутренняя область – это сердечник ротора. Эта область представляет собой пространство между двумя цилиндрами, одним из которых является вал двигателя, а другим – дно пазов ротора. Внутренний круг разделен на количество равных частей, задаваемых пользователем. Каждый паз ротора и корень зуба также разделены на определенное пользователем количество сегментов. Затем указывается количество промежуточных слоев и веса.Результирующая сетка создается слой за слоем от внутреннего круга до внешнего круга. В этом методе используется весовая функция (Hwang, Salon and Palma, 1988), которая относится к рисунку 4.2.2.
Рисунок 4.2.2. Разделение двигателя на слои
(4.2.1) W = R + AB / NBR + GH / NA
, где AB и GH относятся к длинам дуги, NB и NA – указанное количество сегментов вдоль этих дуг, а R как показано на рисунке 4.2.2. Общее количество слоев тогда составляет
(4.2.2) N = NINT [log (AB / NBGH / NA) log W]
, где NINT возвращает ближайшее целое число к аргументу.Длина d 1 находится как
(4.2.3) d1 = (W − 1) * RWN − 1
Количество сегментов на этом слое
(4.2.4) N1 = NA + NINT (NB − NA) * d1 / R)
Чтобы найти следующий слой, мы повторно вычисляем W, заменяем N на N-1 и R на R −d 1 и так далее. Первым шагом в прогнозировании характеристик магнитной вибрации конкретной электрической машины является анализ динамического магнитного поля, действующего в машине. Затем данные магнитного поля можно использовать для вычисления сил и их распределений, которые затем, в свою очередь, применяются к механической модели машины и используются для прогнозирования вибраций.
Рассмотрим случай, показанный на рисунке 4.2.2, с сегментами NA на внутреннем круге и сегментами NB на внешнем сегменте. Все внутренние узлы будут размещены на кругах, радиус которых полностью определяется количеством слоев и весами. Осталось только определить количество узлов (или сегментов) на каждом круге.
Зуб и паз ротора симметричны на каждом половинном шаге паза. Геометрия указана на рисунке 4.2.3.
Рисунок 4.2.3. Паз и зуб
Количество слоев и вес задаются, как и в случае сердечника ротора, а сетка создается для полуслота с использованием уравнения (4.2.4). Затем сетка отражается вокруг центральной линии паза и повторяется N r раз, где N r – количество пазов ротора. Области сетки отличаются от областей материала. Свойства материала указываются независимо. Благодаря этой дополнительной гибкости область зацепления ротора содержит один слой элементов в воздушном зазоре, как показано выше. Причина этого выбора будет объяснена ниже при обсуждении движущейся сетки.
Область воздушного зазора представляет собой кольцевую область, аналогичную сердечнику ротора, и зацеплена таким же образом.Обратите внимание, что область сетки docs воздушного зазора не точно соответствует воздушному зазору, поскольку один слой фактического воздушного зазора находится в зацеплении с ротором, а другой – со статором.
Область зуба и паза статора (и один слой элементов в воздушном зазоре) обрабатывается так же, как и область зуба и паза ротора выше. Область сердечника статора рассматривается как область сердечника ротора.
По мере вращения ротора элементы воздушного зазора необходимо постоянно заменять. В последующем анализе мы покажем, что для электромагнитных целей ротор моделируется в своей собственной системе отсчета.Сердечник ротора и области щелевых зубьев не переключаются, а только вращаются. Сердечник статора и области щелевых зубцов остаются неподвижными. Постоянно изменяется только область воздушного зазора (исключая часть воздушного зазора, прикрепленную к сетке ротора и сетке статора, как описано выше). Сетка создается таким образом, что область воздушного зазора находится между двумя кругами с одинаковым расстоянием между узлами. Повторное объединение выполняется (при необходимости) без добавления каких-либо новых узлов или элементов. Алгоритм только повторно соединяет существующие элементы, используя новые узловые позиции.Это показано на рисунке 4.2.4 для двух моментов времени.
Рисунок 4.2.4. Замена слоев воздушного зазора
Асинхронные двигатели с короткозамкнутым ротором – Engg Cyclopedia
Возможно, наиболее известным типом электродвигателей, используемых в настоящее время, является трехфазный асинхронный двигатель с короткозамкнутым ротором .
Обычно он состоит из двух (2) основных компонентов: статора и ротора . Как следует из их названия, часть статора неподвижна, а часть ротора вращается.Статор создает вращающееся магнитное поле по сравнению с ротором, которое преобразует этот тип энергии в движение, то есть механическую энергию. См. Рис. 1 (D-конец обозначает конец с приводом от двигателя, то есть оборудование, приводимое в движение двигателем, например, насос, расположено на этой стороне, тогда как N-конец обозначает неприводной конец двигателя)
Рисунок 1 – Конструкция электродвигателяКак работает электродвигатель
Чтобы объяснить, как работает электродвигатель, необходимо сначала отметить, что статор подключен к трехфазному источнику питания.Ток, который прикладывается к обмоткам статора, создает вращающееся магнитное силовое поле, которое, в свою очередь, создает ток также на роторе двигателя. В результате на роторе также создается магнитное поле. Взаимодействие между этими двумя магнитными полями (т.е. от статора и от ротора) дает вращающий момент , который является причиной вращения вала ротора.
Скорость вращения двигателя и скольжение двигателя
Из-за различных потерь, присущих самой природе двигателя, скорость двигателя всегда примерно на 1–3% ниже по сравнению с синхронной скоростью магнитного поля.Эта разница обычно обозначается как скольжение (я) двигателя .
Скольжение рассчитывается по следующей формуле:
s = (n1 – n) / n1 …. (1), где:
n1 = синхронная скорость
n = асинхронная скорость
В результате этот тип двигателей обычно известен как асинхронные двигатели .
Однако следует отметить, что двигатели с постоянными магнитами вообще не производят скольжения (двигатели с постоянными магнитами в этой статье обсуждаться не будут).
Синхронная скорость (n), , выраженная в оборотах в минуту (или об / мин), определяется по следующей формуле:
n = (120 * f) / p …. (2), где:
f = частота питания двигателя (в Гц) и
p = количество полюсов двигателя (четное число)
КПД электродвигателя
Как и ожидалось, преобразование энергии в асинхронном двигателе с короткозамкнутым ротором не без потерь. Происходит несколько потерь, среди прочего, в результате потерь сопротивления, потерь на вентиляцию, потерь на трение и т. Д.
Следовательно, КПД двигателя (n) выражается следующей формулой:
n = P2 / P1 …. (3), где
P2 = мощность на валу двигателя (Вт)
P1 = приложенная электрическая мощность (Вт)
P2 указан на заводской табличке двигателя.
Класс изоляции
Класс изоляции относится к изоляционному материалу обмоток двигателя. Существует несколько классов изоляции, а именно B, F и H, в соответствии со стандартами IEC (Международной электротехнической комиссии). Буква, соответствующая температуре, которая является верхним пределом для области применения изоляции, характеризует каждый класс изоляции.
Класс изоляции B соответствует максимальной температуре обмотки 130 ° C (температура окружающей среды 40 ° C + повышение температуры 80 ° C + температурный запас 10 ° C)
Класс изоляции F соответствует максимальной температуре обмотки 155 ° C (температура окружающей среды 40 ° C + повышение температуры 105 ° C + температурный запас 10 ° C)
Класс изоляции H соответствует максимальной температуре обмотки 180 ° C (температура окружающей среды 40 ° C + повышение температуры 125 ° C + температурный запас 15 ° C)
Класс защиты
Класс защиты двигателя обозначается буквами IP ( IP означает Ingress Protection ), за которыми следуют две цифры, первая из которых указывает степень защиты от контакта и проникновения твердых предметов, а вторая указывает на степень защиты двигателя. степень защиты от воды.Эта классификация соответствует стандарту IEC 60034-5. Для получения более подробной информации о обозначении защиты IP, пожалуйста, обратитесь к статье Enggyclopedia о «Корпуса с защитой от проникновения».
Метод охлаждения
Методы охлаждения в соответствии с IEC 60034-6 могут сказать, как охлаждается асинхронный двигатель с короткозамкнутым ротором. Метод охлаждения обозначается буквами IC ( IC обозначает International Cooling ), за которыми следует серия цифр, обозначающих тип охлаждения (например,грамм. самовентилируемый, принудительное охлаждение и т. д.) и режим работы охлаждения (например, поверхностное охлаждение, жидкостное охлаждение и т. д.). Пожалуйста, обратитесь к Рисунку 2, на котором показаны наиболее распространенные методы охлаждения асинхронных двигателей с короткозамкнутым ротором.
Рисунок 2 – Распространенные методы охлаждения электродвигателяАсинхронная машина с короткозамкнутым ротором и параметрированием на единицу или в системе СИ – MATLAB
Описание
Блок белка индукционной машины модели a Асинхронная машина с короткозамкнутым ротором с основными параметрами, выраженными в единице или в Международной системе единиц (СИ).Асинхронная машина с короткозамкнутым ротором – это тип индукционной машины. Все соединения статора доступны на блоке. Следовательно, вы можете моделировать режимы плавного пуска, используя переключатель между звездой и треугольником. конфигурации. Если вам нужен доступ к обмоткам ротора, используйте вместо него блок с обмоткой ротора индукционной машины.
Подключите порт ~ 1 к трехфазной цепи. Для подключения статора в дельта-конфигурации подключите блок Phase Permute между портами ~ 1 и ~ 2 .Для подключения статора в конфигурации звездой подключите порт ~ 2 к заземленному Нейтраль (трехфазная) или плавающая нейтраль (Трехфазный) блок.
Уравнения
Для реализации SI блок преобразует введенные вами значения SI в удельные значения для моделирования. Преобразованные значения основаны на том, что машина соединены по схеме “треугольник”.
Для реализации на единицу необходимо указать сопротивления и индуктивности. на вкладке импедансов в зависимости от машины, подключенной по схеме треугольника. конфигурация.
Для получения информации о взаимосвязи между системой единиц СИ и единичными машинными параметрами, см. Преобразование на единицу для параметров машины. Для получения информации о параметризации на единицу, см. Система единиц на единицу.
Уравнения индукционной машины выражаются относительно синхронного система отсчета, определенная
, где f с рейтингом – значение параметра Номинальная электрическая частота .
Преобразование Парка отображает уравнения статора в систему отсчета, которая стационарный относительно номинальной электрической частоты. Преобразование парка определяется
, где θ e – электрический угол.
Преобразование Парка используется для определения удельной индукционной машины. уравнения. Уравнения напряжения статора определены в
и
где:
v DS , v qs и v 0s являются d – ось, q – ось и напряжения статора нулевой последовательности, определяемые как
[vdsvqsv0s] = Ps [vavbvc].
v , v b и v c – статор напряжения на портах ~ 1 и ~ 2 .
ω основание – удельное основание электрическая скорость.
ψ DS , ψ qs и ψ 0s являются d – ось, q – ось и потокосцепления статора нулевой последовательности.
R s – статор сопротивление.
i DS , i qs и i 0s являются d – ось, q – ось и токи статора нулевой последовательности, определенные как
[idsiqsi0s] = Ps [iaibic].
i a , i b и i c – статор токи, протекающие от порта ~ 1 к порту ~ 2 .
Уравнения напряжения ротора определены в
и
где:
v dr и v qr являются d – ось и q – ось ротора напряжения.
ψ dr и ψ qr являются d – ось и q – поток ротора связи.
ω – синхронная скорость на единицу. Для синхронный опорный кадр, значение 1.
ω r – единичное механическая частота вращения.
R rd – сопротивление ротора относится к статору.
я др и i qr являются d – ось и q – ось ротора токи.
Уравнения потокосцепления статора определены в
и
, где L ss – статор самоиндуктивность и L м намагничивание индуктивность.
Уравнения потокосцепления ротора определены в
и
, где L rrd – ротор самоиндукция относительно статора.
Крутящий момент ротора определяется
Самоиндукция статора L SS , статора индуктивность рассеяния L ls , и намагничивание индуктивность L м относятся к
Самоиндукция ротора L rrd , ротор индуктивность рассеяния L lrd , и намагничивание индуктивность L м относятся к
Если представлена кривая насыщения, уравнения для определения насыщенного намагничивающая индуктивность как функция намагничивающего потока:
При отсутствии насыщения уравнение сводится к
Параметры построения и отображения
Вы можете выполнять действия по построению и отображению, используя в контекстном меню блока.
Щелкните блок правой кнопкой мыши и в меню выберите вариант:
– отображает машину базовые значения на единицу в командном окне MATLAB ® .
– График зависимости крутящего момента от скорость, оба измеренные в единицах СИ, в окне фигуры MATLAB с использованием текущих параметров машины.
– График зависимости крутящего момента от скорость, оба измеренные на единицу, в окне фигуры MATLAB с использованием текущих параметров машины.
– Терминал участков напряжение в зависимости от тока линии без нагрузки, как на единицу, в окне рисунка MATLAB. Сюжет содержит три следа:
Ненасыщенный – индуктивность намагничивания статора (ненасыщенный).
Насыщенный – справочная таблица разомкнутой цепи ( v по сравнению с и ) вы указываете.
Derived – поисковая таблица разомкнутой цепи, полученная из единиц измерения таблица поиска разомкнутой цепи ( v по сравнению с и ) вы указываете.Эти данные используются для рассчитать индуктивность насыщения намагничивания, L м_сат , и коэффициент насыщения, K s , по сравнению с магнито-потокосцепление, ψ м , характеристики.
– Насыщенность графиков коэффициент, К с , в зависимости от магнитного потока связь, ψ м , в окне фигуры MATLAB с использованием параметров машины. Этот параметр на основе других указанных вами параметров:
Данные о насыщении тока линии холостого хода, i
Данные о насыщении напряжения на клеммах, В
Индуктивность утечки, L ls
– Графики намагничивания индуктивность, L м_сат , относительно магнитопровод, ψ м , в Окно фигуры MATLAB с использованием машинных параметров.Этот параметр на основе других указанных вами параметров:
Данные о насыщении тока линии холостого хода, i
Данные о насыщении напряжения на клеммах, В
Индуктивность утечки, L ls
Для реализации SI, v находится в V (фаза-фаза RMS) и и указаны в А (среднеквадратичное значение).
Тепловой порт
Блок имеет четыре дополнительных тепловых порта, которые по умолчанию скрыты. Разоблачить тепловые порты, щелкните правой кнопкой мыши блок в вашей модели, а затем из контекстного меню выберите>>. Этот Действие отображает тепловые порты HA , HB , HC и HR на значке блока, и предоставляет параметры Thermal .
Используйте термопорт для моделирования воздействия выделяемого тепла и машины. температура.Для получения дополнительной информации об использовании тепловых портов и о Тепловые параметры , см. Моделирование тепловых эффектов в поворотных и поступательных приводах.
Переменные
Используйте настройки Переменные , чтобы указать приоритет и начальную цель значения для переменных блока перед симуляцией. Для получения дополнительной информации см. Установка приоритета и начальной цели для блочных переменных.
Тип переменные, которые отображаются в настройках Переменные , зависят от метод инициализации, который вы выбираете в настройках Main для Параметр инициализации параметр.Чтобы указать целевые значения, используя:
Переменные потока – установите для параметра опции инициализации значение
Установите цели для переменных потока.Данные анализа нагрузки-расхода – установка инициализации параметр от опции до
Установка целевых значений для потока нагрузки переменные.
Если вы выберете Задайте целевые значения для переменных потока нагрузки , чтобы полностью указать начальную
условие, вы должны включить ограничение инициализации в виде высокоприоритетной цели
ценить.Например, если ваша индукционная машина подключена к блоку инерции, начальное условие для индукционной машины будет
полностью указан, если в настройках Variables блока Inertia, Priority for Rotational
скорость установлена на High . В качестве альтернативы вы можете установить Priority – Нет для блока инерции Скорость вращения , и вместо этого установите Приоритет для блока индукционной машины Шлип , Вырабатываемая реальная мощность или Потребляемая механическая мощность на Высокий .
Ссылки
[1] Kundur, P. Power Устойчивость системы и контроль. New York: McGraw Hill, 1993.
[2] Lyshevski, S.E. Электромеханические системы, электрические машины и прикладные Мехатроника. Boca Raton, FL: CRC Press, 1999.
[3] Ojo, J. O., Consoli, A., and Липо, Т. А., «Усовершенствованная модель индукционных машин с насыщением», IEEE Transactions on Industry Applications . Vol. 26, вып. 2, pp. 212-221, 1990.
Асинхронные двигатели переменного тока
|
Разница между индукционным электродвигателем с контактным кольцом и короткозамкнутым ротором и сравнительная таблица
Асинхронный двигатель с короткозамкнутым ротором – самый популярный тип двигателей переменного тока.Он очень часто используется в промышленности, потому что он очень дешевый, прочный, эффективный и надежный. Электродвигатель с контактным кольцом практически не применяется в промышленности. Двигатели с токосъемным кольцом 5-10% редко используются в промышленности, поскольку они имеют ряд недостатков, таких как необходимость частого обслуживания, высокие потери меди и т. Д.
Одно из основных различий между контактным кольцом и двигателем с короткозамкнутым ротором состоит в том, что двигатель с контактным кольцом имеет цепь внешнего сопротивления для управления скоростью двигателя.В то время как в двигателе с короткозамкнутым ротором невозможно добавить какую-либо внешнюю цепь, потому что стержень двигателя постоянно имеет паз на конце кольца. Некоторые другие различия между ними объясняются ниже в сравнительной таблице.
Сравнительная таблица: электродвигатель с короткозамкнутым ротором, обжимное кольцо, об / с
Сравнительная таблица
| Основа для сравнения | Мотор с контактным кольцом | Мотор с короткозамкнутым ротором |
|---|---|---|
| Определение | Ротор двигателя выполнен в виде контактного кольца. | Ротор двигателя – короткозамкнутый. |
| Ротор | Цилиндрический ламинированный сердечник с параллельными прорезями, каждый из которых состоит из одной планки. | Пазы ротора не параллельны, а перекошены. |
| Другое название | Ротор с фазовой обмоткой | Двигатель с сепаратором |
| Конструкция | Сложная | Простая |
| Сопротивление | Добавлено вне ротора | Штанга ротора постоянно закорочена на конце кольца, поэтому невозможно добавить какое-либо внешнее сопротивление. |
| Стартер | Можно использовать стартер сопротивления ротора. | Пускатель сопротивления ротора использовать нельзя. |
| Пусковой момент | Высокий | Низкий |
| Кисти | Есть | Отсутствуют |
| Техническое обслуживание | Требуется частое техническое обслуживание | Требуется меньше технического обслуживания |
| Потери в меди | Высокая | Низкая |
| Эффективность | Низкая | Высокая |
| Регулировка скорости | Возможно | Невозможно |
| Коэффициент мощности | Низкий | Высокий |
| Стоимость | Дорого | Недорого |
| Пусковой ток | Низкий | Высокий |
| Использует | Используется в подъемниках, кранах, лифтах, где требуется высокий крутящий момент. | Использование в токарных станках, вентиляторах, воздуходувках, прибыльных станках и т. Д. |
Определение электродвигателя с контактным кольцом
Двигатель, в котором используется ротор с фазной обмоткой, известен как асинхронный двигатель с контактным кольцом или двигатель с фазной обмоткой. Он состоит из многослойного цилиндрического сердечника, который имеет полузамкнутую прорезь на внешней периферии и несет трехфазную изолированную обмотку. Ротор намотан на такое же количество полюсов, что и у статора.
Три конечных клеммы соединены, образуя звезду, а три пусковых клеммы подключены к трем медным контактным кольцам, закрепленным на валу.Вал из низкоуглеродистой стали проходит через центр ротора и фиксируется на шпонке. Вал предназначен для передачи механической энергии.
Определение двигателя с короткозамкнутым ротором
Двигатель, в котором используется ротор с короткозамкнутым ротором, известен как двигатель с короткозамкнутым ротором. Конструкция ротора прочная и простая. Ротор двигателя состоит из многослойного цилиндрического сердечника с полузамкнутыми круговыми пазами и закорачивает на каждом конце медным или алюминиевым кольцом, называемым короткозамыкающим кольцом.Невозможно добавить какое-либо внешнее сопротивление в ротор цепи.
Прорези ротора не параллельны, а перекошены. Перекос ротора имеет следующие преимущества.
- Уменьшает гудение и, таким образом, обеспечивает тихую работу двигателя.
- Перекос ротора обеспечивает плавные кривые крутящего момента для различных положений ротора.
- Уменьшает магнитную блокировку статора и ротора.
- Увеличивает сопротивление ротора за счет увеличенной длины проводников стержня ротора.
Ключевые различия между контактным кольцом и асинхронным двигателем с короткозамкнутым ротором
- Двигатель, ротор которого имеет намотанный тип двигателя такого типа, называется асинхронным двигателем с контактным кольцом, тогда как двигатель с короткозамкнутым ротором имеет ротор с короткозамкнутым ротором.
- Ротор электродвигателя с контактным кольцом имеет цилиндрический сердечник с параллельными пазами, и каждый паз состоит из каждой планки. Пазы двигателя с короткозамкнутым ротором не параллельны друг другу.
- Электродвигатель с контактным кольцом также называется ротором с фазной обмоткой.Другое название двигателя с короткозамкнутым ротором – двигатель с короткозамкнутым ротором.
- Конструкция электродвигателя с контактным кольцом сложна, поскольку он состоит из контактного кольца и щеток, тогда как конструкция электродвигателя с короткозамкнутым ротором проста.
- Двигатель с фазной обмоткой состоит из внешней цепи сопротивления, тогда как в двигателе с короткозамкнутым ротором невозможно добавить какую-либо внешнюю цепь сопротивления, потому что стержни их ротора имеют постоянные пазы.
- Для запуска электродвигателя с контактными кольцами используется резистивный пускатель ротора, тогда как для электродвигателя с контактными кольцами не требуется пускатель.
- Пусковой момент двигателя с фазным ротором высокий, тогда как у двигателя с короткозамкнутым ротором он низкий.
- Стоимость обслуживания электродвигателя с контактным кольцом высока по сравнению с электродвигателем с короткозамкнутым ротором, поскольку электродвигатель с контактным кольцом состоит из щеток и колец.
- Потери меди больше в электродвигателе с контактным кольцом по сравнению с электродвигателем с короткозамкнутым ротором.
- Электродвигатель с контактным кольцом имеет щетки для передачи мощности, тогда как электродвигатель с короткозамкнутым ротором является бесщеточным.
- Потери меди в двигателе с фазовой обмоткой высоки по сравнению с двигателем с короткозамкнутым ротором.
- КПД электродвигателя с контактным кольцом низкий, тогда как электродвигатель с короткозамкнутым ротором имеет высокий КПД.
- Скорость фазного двигателя регулируется с помощью цепи сопротивления. Невозможно контролировать скорость двигателя с короткозамкнутым ротором.
