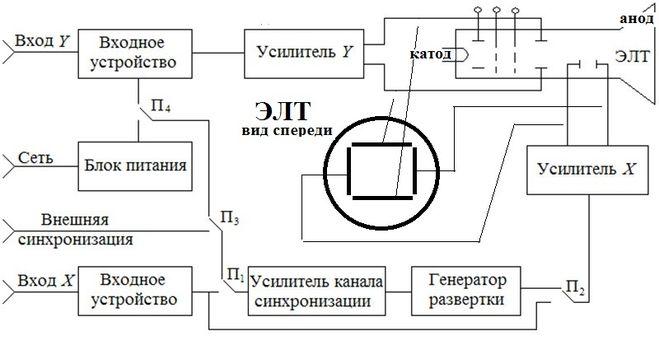
2. Блок-схема осциллографа
2.1. Канал вертикального отклонения
– усиливает или ослабляет сигнал до значения, удобного для изучения (ручки управления: “В/дел” или “мВ/дел“, где деление – это большая клетка на шкале экрана трубки). Линия задержки ЕТ задерживает сигнал на некоторое время, необходимое для запуска генератора горизонтальной развертки схемой синхронизации – это позволяет наблюдать передний фронт сигнала.
2.2. Канал горизонтального отклонения
– обеспечивает формирование напряжения развертки для управления перемещением луча по горизонтали.
Генератор развертки – основной узел канала X. Он формирует пилообразное напряжение. Генератор может работать в автоколебательном или ждущем режиме.
Рис. 6 Блок-схема осциллографа
В автоколебательном
режиме генератор непрерывно вырабатывает
пилообразное напряжение (рис. 4).
Этот режим используется для наблюдения
гармонических, а также периодических
импульсных сигналов с небольшой
скважностью (т.е. когда импульс занимает
значительную часть периода)
.
4).
Этот режим используется для наблюдения
гармонических, а также периодических
импульсных сигналов с небольшой
скважностью (т.е. когда импульс занимает
значительную часть периода)
.
В ждущем режиме генератор вырабатывает однократную “пилу” только когда приходит сигнал запуска (сигнал синхронизации). Запуск следующей осуществляется следующим импульсом синхронизации, но только после того, как закончилась предыдущая “пила”. Этот режим целесообразно использовать для наблюдения непериодических сигналов или сигналов с очень большим периодом.
Генератор развертки, кроме пилообразного напряжения для отклонения луча, вырабатывает отрицательный гасящий импульс, который подается на модулятор ЭЛТ и запирает ее на время обратного хода луча, чтобы на экране не прочерчивалась линия возврата луча.
Рис. 7. Преобразование напряжения развертки
при синхронизации сигналов, периоды
которых немного отличаются от периода
То напряжения развертки.
Размер по оси “X” уменьшен, но масштаб сохранен.
Тсигн = То
Тсигн > То
Тсигн < То
УСТРОЙСТВО СИНХРОНИЗАЦИИ И ЗАПУСКА РАЗВЕРТКИ формирует высокостабильный импульс запуска, форма и амплитуда которого не зависят от формы и амплитуды исследуемого. Импульс запуска в ждущем режиме осуществляет запуск развертки, в автоколебательном – ее синхронизацию. Причем в автоколебательном режиме развертка вырабатывается непрерывно, даже при отсутствии импульса запуска, однако изображение в этом случае получается неустойчивое ввиду несоответствия периодов сигнала и развертки. Коррекция периода развертки в этом случае происходит только за счет изменения длительности обратного хода луча. Параметры прямого хода – наклон и амплитуда “пилы” – не должны меняться, так как это привело бы к нарушению масштаба сетки по оси времени – Х (определяется наклоном) и горизонтального размера изображения (определяется амплитудой) (
 7)
7)Рис. 8 Формирование импульса запуска. Ждущий режим развертки.
Формирование импульса запуска происходит в тот момент времени, когда напряжение исследуемого входного сигнала становится равно заданному уровню (рис.8). Таким образом, начало развертки “привязывается” к определенной точке исследуемого сигнала. Регулировать уровень запуска Uур можно ручкой управления “уровень“. Импульс запуска может формироваться как при пересечении уровнем запуска переднего (возрастающего) фронта сигнала (переключатель режима синхронизации (“”или “+”), так и при пересечении заднего (спадающего) фронта (“” или “–”).
В некоторых осциллографах переход из
автоколебательного режима в ждущий
осуществляется плавной регулировкой.
При этом ручка запуска (“Режим
запуска“, “Стабильность”
и т.д.) имеет два основных положения
– обычно по часовой стрелке до упора
↻–автоколебательный
режим (он используется для периодических
процессов, амплитуда которых слишком
мала для запуска ждущей развертки) и
против часовой стрелки до упора
– ↺)
– ждущий режим. Границу между этими
двумя режимами можно определить так:
ручку “уровень” повернуть
против часовой стрелки до упора
– на “нулевой” уровень (при
этом импульс синхронизации не
вырабатывается) и найти
положение ручки режима запуска
(“стабильность“), при котором
луч исчезает (без импульса синхронизации
в автоколебательном режиме картинка
есть, в ждущем
– нет). Работать с
осциллографами, в которых переход
режимов осуществляется плавно,
рекомендуется в ждущем режиме.
Границу между этими
двумя режимами можно определить так:
ручку “уровень” повернуть
против часовой стрелки до упора
– на “нулевой” уровень (при
этом импульс синхронизации не
вырабатывается) и найти
положение ручки режима запуска
(“стабильность“), при котором
луч исчезает (без импульса синхронизации
в автоколебательном режиме картинка
есть, в ждущем
– нет). Работать с
осциллографами, в которых переход
режимов осуществляется плавно,
рекомендуется в ждущем режиме.
Рис. 9. Блок-схема осциллографа с Z-каналом яркости
2.3. Канал Z
– Канал Z (Рис.9) служит для модуляции яркости луча внешним сигналом. Этот канал можно использовать для измерения частоты сигнала (Рис.10) и временных интервалов (см. п.3.4 где описана работа со встроенным в осциллограф модулятором. Встроенные модуляторы есть не во всех осциллографах.
2. 4 Встроенные в ЭЛО КАЛИБРАТОР позволяют с достаточной
точностью калибровать масштабную сетку
по оси Y (напряжение сигнала) и по оси X
(напряжение развертки, определяющее
масштаб времени) (см. разделы
3.3 и 3.4). Калибратор
представляют собой высокостабильный
(эталонный) генератор сигналов, обычно
с набором нескольких фиксированных
частот и амплитуд.
4 Встроенные в ЭЛО КАЛИБРАТОР позволяют с достаточной
точностью калибровать масштабную сетку
по оси Y (напряжение сигнала) и по оси X
(напряжение развертки, определяющее
масштаб времени) (см. разделы
3.3 и 3.4). Калибратор
представляют собой высокостабильный
(эталонный) генератор сигналов, обычно
с набором нескольких фиксированных
частот и амплитуд.
Рис. 10. Измерение периода сигнала при помощи внешней модуляции луча (канал 2). Картинка устойчива, когда частоты сигналов fу и fz кратны.
3. ТЕХНИКА ОСЦИЛЛОГРАФИЧЕСКИХ ИЗМЕРЕНИЙ.
Метрология и стандартизация
Поможем написать любую работу на аналогичную тему
Реферат
Метрология и стандартизация
От 250 руб
Контрольная работа
Метрология и стандартизация
От 250 руб
Метрология и стандартизация
От 700 руб
Получить выполненную работу или консультацию специалиста по вашему учебному проекту
Узнать стоимость
Метроло́гия — наука об измерениях, методах и средствах обеспечения их единства и способах достижения требуемой точности.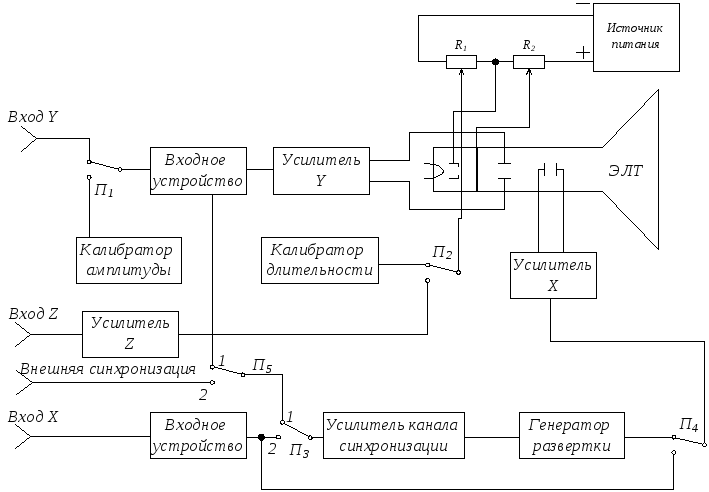 Предметом метрологии является извлечение количественной информации о свойствах объектов с заданной точностью и достоверностью; нормативная база для этого — метрологические стандарты.
Предметом метрологии является извлечение количественной информации о свойствах объектов с заданной точностью и достоверностью; нормативная база для этого — метрологические стандарты.
Метрология состоит из трёх основных разделов:
- Теоретическая или фундаментальная — рассматривает общие теоретические проблемы (разработка теории и проблем измерений физических величин, их единиц, методов измерений).
- Прикладная — изучает вопросы практического применения разработок теоретической метрологии. В её ведении находятся все вопросы метрологического обеспечения.
- Законодательная — устанавливает обязательные технические и юридические требования по применению единиц физической величины, методов и средств измерений.
Стандартиза́ция — деятельность по разработке, опубликованию и применению стандартов, по установлению норм, правил и характеристик в целях обеспечения безопасности продукции, работ и услуг для окружающей среды, жизни, здоровья и имущества, технической и информационной совместимости, взаимозаменяемости и качества продукции, работ и услуг в соответствии с уровнем развития науки, техники и технологии, единства измерений, экономии всех видов ресурсов, безопасности хозяйственных объектов с учётом риска возникновения природных и техногенных катастроф и других чрезвычайных ситуаций, обороноспособности и мобилизационной готовности страны.
Стандартизация направлена на достижение оптимальной степени упорядочения в определенной области посредством установления положений для всеобщего и многократного применения в отношении реально существующих или потенциальных задач.
За реализацию норм стандартизации отвечают органы стандартизации, наделенные законным правом руководить разработкой и утверждать нормативные документы и другие правила, придавая им статус стандартов.
В области промышленности стандартизация ведет к снижению себестоимости продукции, поскольку:
- позволяет экономить время и средства за счет применения уже разработанных типовых ситуаций и объектов;
- повышает надежность изделия или результатов расчетов, поскольку применяемые технические решения уже неоднократно проверены на практике;
- упрощает ремонт и обслуживание изделий, так как стандартные узлы и детали — взаимозаменяемые (при условии, что сборка осуществлялась без пригоночных операций).
На нашем сайте предоставлены учебные материалы для студентов, по метрологии и стандартизации. Суммарно около
Внимание!
Если вам нужна помощь в написании работы, то рекомендуем обратиться к профессионалам. Более 70 000 авторов готовы помочь вам прямо сейчас. Бесплатные корректировки и доработки. Узнайте стоимость своей работы.
Расчет стоимостиГарантииОтзывы
Ускорение проверки синхронизации шины питания с помощью 8-канального осциллографа
В большинстве современных электронных систем используется более одной шины питания, а во многих — четыре или более. Для одной ИС, такой как FPGA, DSP или микроконтроллер, может потребоваться несколько шин питания, и у них могут быть особые требования к синхронизации. Например, производитель микросхемы может порекомендовать стабилизировать напряжение питания ядра перед подачей напряжения питания ввода-вывода. Или производитель может потребовать, чтобы источники питания подавались в течение определенного времени относительно друг друга, чтобы избежать длительных перепадов напряжения на различных выводах питания. Последовательность включения между процессорами и внешней памятью также может иметь решающее значение.
Последовательность включения между процессорами и внешней памятью также может иметь решающее значение.
Рис. 1. На этом снимке экрана показано измерение включения импульсного блока питания переменного/постоянного тока после нажатия переключателя на передней панели.
Производители чипов могут указать, что определенные источники питания должны поступать монотонно, чтобы избежать многократного сброса при включении питания. Это может быть сложной задачей, поскольку пусковые токи могут предъявлять высокие требования к переходным процессам для регуляторов нагрузки. В этом случае форма запуска шины питания так же важна, как и временная последовательность. Как только вы объедините различные требования к источникам питания микросхем, оптовым поставкам, эталонным источникам питания и регуляторам с несколькими точками нагрузки для других ИС в одном проекте, вы сможете быстро получить до семи или восьми шин питания.
Использование 4-канального осциллографа для проверки синхронизации шины питания во встроенной системе может занять много времени, но в настоящее время большинство инженеров делают это именно так. В этой статье мы сначала рассмотрим, почему это может быть сложно с 4-канальным осциллографом для этой цели, а затем мы покажем несколько примеров с использованием 8-канального осциллографа, которые становятся все более распространенными в отрасли. .
В этой статье мы сначала рассмотрим, почему это может быть сложно с 4-канальным осциллографом для этой цели, а затем мы покажем несколько примеров с использованием 8-канального осциллографа, которые становятся все более распространенными в отрасли. .
Рис. 2. Курсорное измерение осциллограммы можно использовать для проверки того, что сигнал предварительного предупреждения PW OK работает, как указано.
Традиционный 4-канальный осциллограф
Один из подходов при использовании 4-канального осциллографа заключается в анализе энергосистемы по блокам и использовании нескольких сборов для проверки синхронизации по блокам. Для сравнения между блоками в качестве триггера можно использовать одну из шин или сигнал мощности/неисправности, и можно выполнить несколько захватов, определяя время запуска и отключения относительно опорного сигнала. Поскольку приобретение осуществляется в течение нескольких циклов питания, будет трудно охарактеризовать различия в относительном времени поставок.
Реклама
Еще один распространенный подход — «каскадировать» несколько областей. Обычно это делается путем запуска осциллографов на одном из источников питания или на общем сигнале питания «хорошо/сбой».
Рис. 3. Повторяющиеся измерения времени включения могут быть выполнены с использованием бесконечного постоянства и статистики измерений.
Оба эти подхода отнимают много времени и требуют особого внимания к синхронизации:
- Работа с синхронизацией и временной неопределенностью требует осторожности
- Агрегирование данных для разработки временной диаграммы системы возможно, но требует много времени
- Сложность возрастает с увеличением количества наблюдаемых шин питания
- Настройки должны быть идеально согласованы
- Для обеспечения синхронизации должен использоваться один измерительный канал
Осциллограф смешанных сигналов может предоставить дополнительные каналы для последовательного включения питания.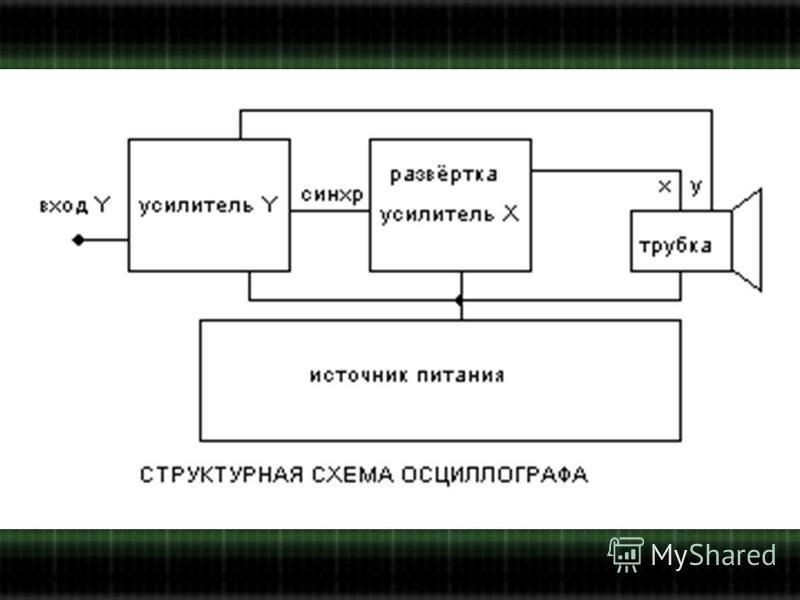 Чтобы это работало, MSO должен иметь подходящий диапазон напряжения на цифровых входах и независимо регулируемые пороги. Например, традиционная опция MSO предлагает 16 цифровых входов с независимыми пороговыми значениями для каждого канала, что делает ее пригодной для большинства уровней напряжения, характерных для типичной конструкции. Обратите внимание, что этот подход хорошо работает, если целью является строгое измерение временных соотношений, но он не позволяет измерять время нарастания/спада или форму (монотонность) включения/выключения питания.
Чтобы это работало, MSO должен иметь подходящий диапазон напряжения на цифровых входах и независимо регулируемые пороги. Например, традиционная опция MSO предлагает 16 цифровых входов с независимыми пороговыми значениями для каждого канала, что делает ее пригодной для большинства уровней напряжения, характерных для типичной конструкции. Обратите внимание, что этот подход хорошо работает, если целью является строгое измерение временных соотношений, но он не позволяет измерять время нарастания/спада или форму (монотонность) включения/выключения питания.
Использование осциллографа с 8 аналоговыми каналами значительно сокращает время и усилия по сравнению с любым из рассмотренных выше методов. С помощью 8-канального осциллографа можно охарактеризовать источники питания с восемью шинами питания с помощью аналоговых пробников. Для измерения временных соотношений включения и выключения источников питания с более чем восемью шинами питания также можно использовать осциллограф смешанных сигналов с цифровыми входами и независимо регулируемыми пороговыми значениями.
Рис. 4. Измерения времени нарастания и спада показаны в полях результатов в правой части дисплея.
Задержка включения
Испытываемый импульсный источник питания на рис. 1 выдает сильноточный регулируемый выходной сигнал 12 В постоянного тока. Этот источник питания управляется дистанционно с помощью переключателя на передней панели прибора. Вскоре после нажатия переключателя включается резервное напряжение +5 В, что позволяет запустить импульсный преобразователь. После того, как выход +12 В находится в стабилизированном состоянии, сигнал Power Good (PW OK) становится высоким, чтобы указать нагрузке, что питание надежно.
Сигнал напряжения в режиме ожидания +5 В обеспечивает простой запуск по переднему фронту для получения соответствующих сигналов. Автоматические измерения подтверждают, что задержка включения выходного напряжения составляет <100 мс, а задержка между включением выходного напряжения и PW OK находится в диапазоне спецификации 100 – 500 мс.
Задержка выключения с дистанционным включением/выключением
После выключения главного выключателя источника питания импульсный преобразователь выключается и выходное напряжение уменьшается.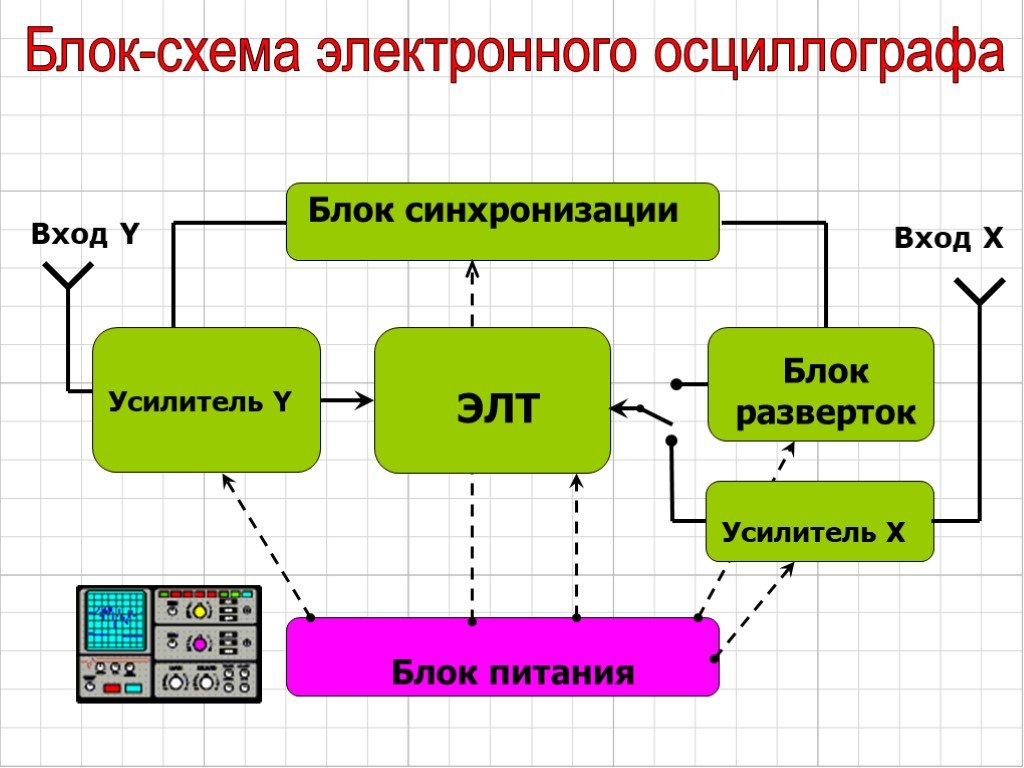 Источник питания должен оставаться в режиме регулирования не менее 20 мс после нажатия переключателя. Что наиболее важно, сигнал PW OK падает за 5–7 мс до того, как выходное напряжение +12 В выходит из-под контроля, что позволяет нагрузке среагировать и корректно отключиться. Как показано на рисунке 2, сигнал PW OK обеспечивает запуск по заднему фронту для получения соответствующих сигналов. Курсорное измерение осциллограммы подтверждает, что сигнал предварительного предупреждения PW OK работает, как указано.
Источник питания должен оставаться в режиме регулирования не менее 20 мс после нажатия переключателя. Что наиболее важно, сигнал PW OK падает за 5–7 мс до того, как выходное напряжение +12 В выходит из-под контроля, что позволяет нагрузке среагировать и корректно отключиться. Как показано на рисунке 2, сигнал PW OK обеспечивает запуск по заднему фронту для получения соответствующих сигналов. Курсорное измерение осциллограммы подтверждает, что сигнал предварительного предупреждения PW OK работает, как указано.
Проверка синхронизации в течение нескольких циклов включения питания
Чтобы убедиться, что время включения источника питания остается в пределах спецификаций в течение нескольких циклов включения питания, можно использовать бесконечное постоянство для отображения изменений синхронизации сигнала и отображения статистики автоматических измерений синхронизации для количественной оценки этих изменений. В схеме, показанной на рис. 3, 50-процентная точка напряжения в режиме ожидания +5 В служит эталоном синхронизации. Последовательность включения повторяется 10 раз, а временные отклонения в течение 10 циклов включения находятся в пределах немногим более 1%.
Последовательность включения повторяется 10 раз, а временные отклонения в течение 10 циклов включения находятся в пределах немногим более 1%.
Измерение времени нарастания источника питания
В дополнение к последовательности включения питания необходимо контролировать время нарастания источников питания, чтобы оно соответствовало спецификациям некоторых критических компонентов системы. Автоматические измерения времени нарастания и спада также выполняются на основе эталонных точек напряжения, которые по умолчанию автоматически рассчитываются как 10 % и 90 % от амплитуды сигнала каждого канала. В примере на рис. 4 время нарастания положительных источников и время спада отрицательных источников показано в полях результатов в правой части дисплея.
Распространение шин питания в современных системах представляет собой серьезную проблему тестирования и измерения. Для оптимизации энергопотребления, производительности и скорости даже относительно простая система может иметь общий источник питания 12 В, пару источников питания 5 В, источник питания 3,3 В и источник питания 1,8 В.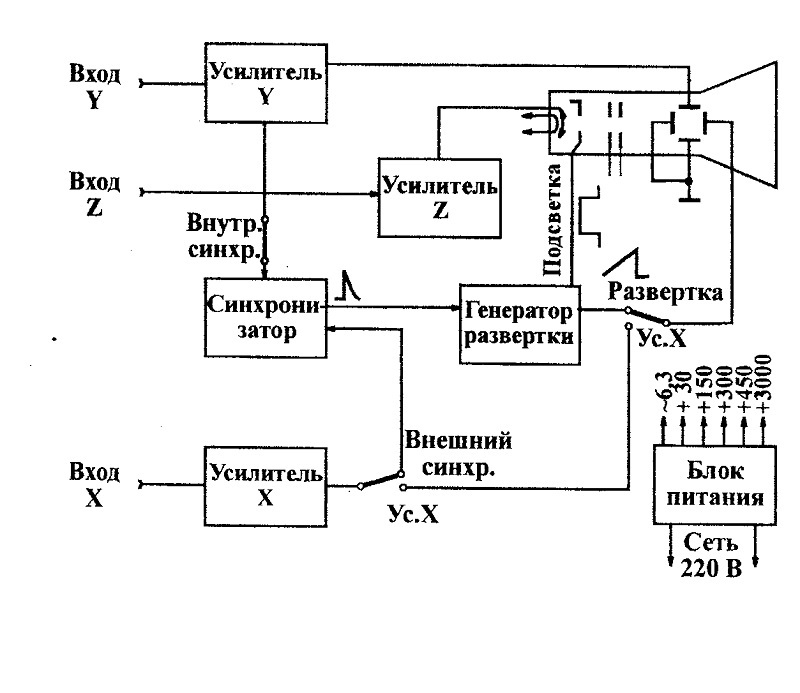 Проверка и устранение неполадок в последовательности включения и выключения этих источников питания может быть более эффективно выполнена с помощью осциллографов, которые предлагают больше, чем традиционные 4 канала.
Проверка и устранение неполадок в последовательности включения и выключения этих источников питания может быть более эффективно выполнена с помощью осциллографов, которые предлагают больше, чем традиционные 4 канала.
Синхронизация и джиттер в сигналах DMX512
Моя предыдущая статья о создании интерфейса Art-Net to DMX с использованием ESP8266, кажется, привлекла много внимания. Однако из комментариев становится ясно, что многие люди, которые строят его сами, испытывают трудности с тем, чтобы заставить его работать, или вообще не заставляют его работать. Этот пост исследует это более подробно.
Мы уже довольно давно не используем эти интерфейсы в своих выступлениях, и начали задаваться вопросом, не с моей ли прошивкой что-то не так. Моя реализация восходит к апрелю 2017 года. Со временем в мой код вносились некоторые обновления. Кроме того, была обновлена среда разработки Arduino, а также ядро ESP8266 для Arduino.
Недавно я получил обратно все три интерфейса, которые я построил для своих сотрудников 1+1=3, и решил обновить прошивку и протестировать их. Один из них вообще не работал из-за обрыва связи между блоком питания и Wemos D1 mini; два из них запустились нормально. После исправления оборванного провода и обновления прошивки на всех трех; они запустились просто отлично, показывая зеленый свет (указывающий на подключение к сети WiFi), и на странице монитора веб-интерфейса я холодно вижу, что пакеты Art-Net принимаются. Однако с моим управляемым по DMX светом это вообще не сработало.
Один из них вообще не работал из-за обрыва связи между блоком питания и Wemos D1 mini; два из них запустились нормально. После исправления оборванного провода и обновления прошивки на всех трех; они запустились просто отлично, показывая зеленый свет (указывающий на подключение к сети WiFi), и на странице монитора веб-интерфейса я холодно вижу, что пакеты Art-Net принимаются. Однако с моим управляемым по DMX светом это вообще не сработало.
Тестирование и первоначальная диагностика
Используя интерфейс Enttec Open DMX и очень хорошее программное обеспечение JV Lightning DmxControl (которое поддерживает как Art-Net, так и Enttec Open DMX), я решил устранить проблему. Поскольку DMX — это синхронизация, я подключил свой мини-осциллограф DS203 к контактам 2 и 3 разъема DMX.
Я нашел подробную схематическую информацию о тайминге протокола DMX на этой странице. В поисках осциллографических изображений сигналов DMX я также нашел эту страницу с информацией.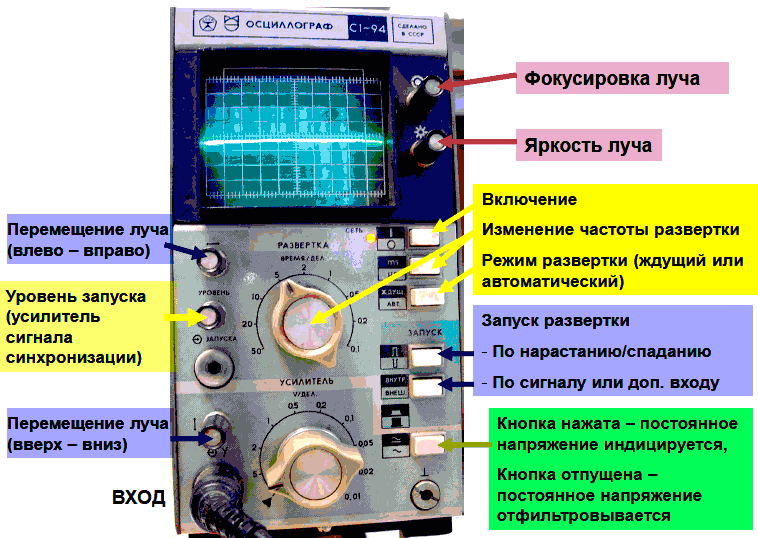
Сравнив выходное напряжение со схемой DMX512, стало ясно, что в сигнале что-то не так. Чтобы было легче увидеть полный сигнал на осциллографе, я настроил только три выходных канала DMX, все обнулив. На осциллографе видно 5 одинаковых блоков; изменив значение для DMX канала 1, я вижу, что меняется 3-й блок — это, видимо, первый канал. До этого должен быть «стартовый код» со значением 0, поэтому последние 4 блока имеют смысл. Но первый блок слишком короткий; также есть очень короткий импульс на всем пути в начале, который не соответствует спецификации.
Выходное напряжение с начальной прошивкой:
Подключив Enttec Open DMX к моему управляемому DMX светильнику, я смог убедиться, что комбинация работает и что интерфейс DMX к моему светильнику не нарушен. Подключив Enttec Open DMX к осциллографу, я вижу, что у него гораздо более длинный 1-й блок, который является «местом для разрыва» (обозначен 1 в соответствии с этим), и немного другой 2-й блок, который является слотом с «стартовым кодом».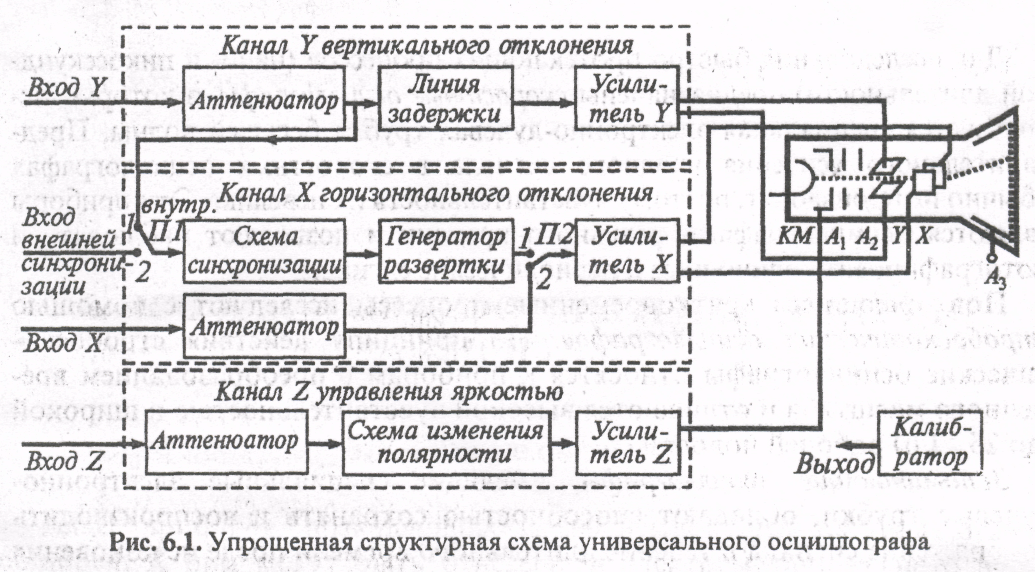 . Ниже приведена целая серия блоков/слотов, соответствующих каналам DMX. В этом случае я не могу ограничить количество каналов DMX, поэтому серия содержит полную вселенную из 512 каналов, каждый из которых установлен на ноль. Меняя значения первых нескольких каналов в Lighting DmxControl, я вижу соответствующее изменение сигнала на осциллографе.
. Ниже приведена целая серия блоков/слотов, соответствующих каналам DMX. В этом случае я не могу ограничить количество каналов DMX, поэтому серия содержит полную вселенную из 512 каналов, каждый из которых установлен на ноль. Меняя значения первых нескольких каналов в Lighting DmxControl, я вижу соответствующее изменение сигнала на осциллографе.
Так как на статичной фотографии экрана осциллографа не видно, что джиттер есть, особенно в первой части сигнала, я выложил короткую видеозапись сигнала Enttec Open DXM.
Выходное напряжение Enttec Open DMX:
Поскольку начальный сигнал «разрыва» явно неправильно реализован в моей прошивке, я изменил код, чтобы использовать низкоуровневую реализацию разрыва, представленную здесь.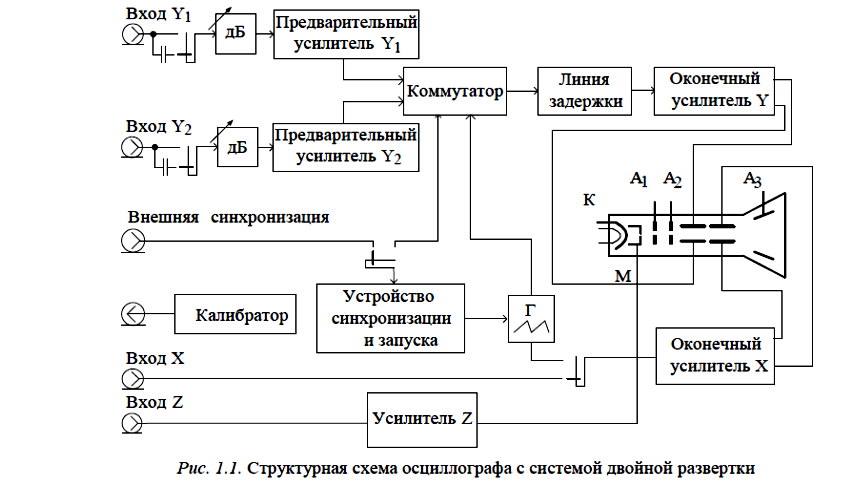 . Снова используя 3 канала DMX, мы получаем хороший сигнал DMX.
. Снова используя 3 канала DMX, мы получаем хороший сигнал DMX.
Выходное напряжение с прошивкой, с использованием низкоуровневого разрыва:
Я исследовал проблему с исходным кодом, которая состоит в переключении на более медленную скорость передачи данных, отправке одного байта в качестве сигнала прерывания и переключение обратно на исходную скорость 250000 бод. Учитывая, что «перерыв» появляется ровно столько же, сколько и другие байты, переключение скорости последовательного порта явно не удается. На форуме Arduino я нашел сообщение, в котором предлагалось очищать последовательный порт до и после изменения скорости; Я реализовал это, и теперь сигнал прерывания снова выглядит нормально.
Я думаю, что причина его поломки связана с обновлениями версии Arduino, которую я использую, и/или обновлениями ядра ESP8266 Arduino. Я предполагаю, что мне повезло с моей первоначальной реализацией с ошибками; это может объяснить, почему у одних она не удалась, а у других сработала.
Выходное напряжение с прошивкой, с использованием медленного последовательного разрыва:
Размер вселенной DMX512
Подключение моего адаптера Art-Net к DMX512 с обновленной прошивкой к управляемому DMX светильнику изначально не работало; Увеличение размера вселенной DMX, передаваемой моим адаптером Art-Net to DMX512, решило эту проблему. После проб и ошибок выяснилось, что хотя я и настроил свет DMX на три канала (R, G, B), он не будет работать, если будет принимать менее 8 каналов.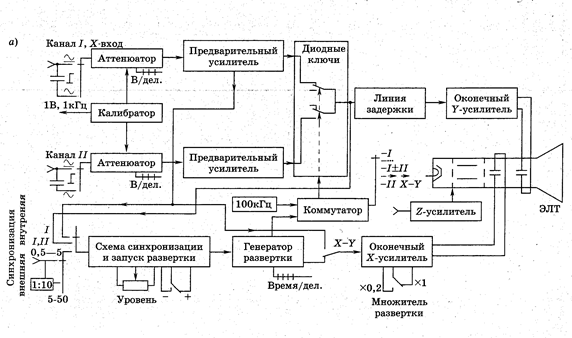 Я полагаю, это потому, что свет имеет 3, 4 и 8-канальный режим DMX, и эти 8 каналов, по-видимому, являются минимумом для правильной обработки входа DMX.
Я полагаю, это потому, что свет имеет 3, 4 и 8-канальный режим DMX, и эти 8 каналов, по-видимому, являются минимумом для правильной обработки входа DMX.
Сравнивая тайминги трех систем
Оглядываясь на видео, я вижу, что тайминги контроллера Enttec Open DXM наихудшие, особенно в области разрыва и отметки после разрыва (MAB). На самом деле это известная характеристика Open DMX, поскольку синхронизация управляется последовательным (USB) портом компьютера, а не специальным микропроцессором; это также причина, по которой он не рекомендуется для серьезных приложений.
Моя собственная прошивка EXP8266 с низкоуровневым кодом для брейка показывает меньше джиттера для брейка. При использовании «медленного последовательного байта» джиттер полностью исчезает для самого разрыва, но все еще остается некоторый джиттер в течение MAB.
Несмотря на дрожание, все три работают нормально с моим управляемым по DMX светом! Увидев время сигналов в деталях, я также более уверен, что они должны работать с другим оборудованием DMX.