
Регулирование частоты вращения асинхронного двигателя
Регулирование частоты вращения асинхронного двигателя определяется в соответствии с требованиями технологических процессов и тех производственных механизмов, в которых он используются. Оно характеризуется следующими основными показателями.
Диапазон регулирования Д (предел изменения частоты вращения). Под этой величиной понимается отношение максимальной частоты вращения двигателя nmах к его минимальной частоте вращения nmin:
D=nmax/nmin. (54)
Плавность регулирования, которая характеризуется минимальным скачком частоты вращения двигателя при переходе с одной механической характеристики на другую.
Направление возможного изменения частоты вращения двигателя (зона регулирования). При номинальных условиях работы (напряжении и частоте питающей сети) асинхронный двигатель имеет естественную механическую характеристику. При регулировании частоты вращения соответствующие им характеристики будут отличаться от естественной.
Экономичность регулирования определяется по дополнительным капитальным затратам, необходимым при создании регулировочных устройств, а также по потерям электроэнергии при регулировании.
Следует отметить, что в ряде случаев, например для механизмов, работающих сравнительно малое время на искусственных характеристиках, потери электроэнергии даже при неэкономичных способах регулирования будут невелики (работа на низких доводочных скоростях лифтов, кранов и др.). При этом более рационально применение простых и дешевых способов регулирования частоты вращения двигателей, даже и неэкономичных с точки зрения потребления энергии.
Допустимая нагрузка двигателя при работе его на регулировочных характеристиках ограничивается величинами токов в статорной и роторных цепях. Эта нагрузка определяется допустимым нагревом двигателя и во многом определяется механическими характеристиками производственных механизмов, моментом сопротивления на валу, моментом инерции двигателя и механизма и т. д.
Эта нагрузка определяется допустимым нагревом двигателя и во многом определяется механическими характеристиками производственных механизмов, моментом сопротивления на валу, моментом инерции двигателя и механизма и т. д.
Регулирование частоты вращения асинхронного двигателя может производиться способом воздействия на него со стороны статора или со стороны ротора.
Чтобы рассмотреть возможные способы регулирования частоты вращения, сначала получим ее выражение. В соответствии с приведенными ранее формулами (3), (4) можно записать, что частота вращения ротора n, об/мин, равна:
(55)
Из формулы (55) следует, что существуют три основных способа регулирования частоты вращения:
- изменением частоты f1 питающего двигатель напряжения;
- изменением числа пар полюсов р;
- изменением скольжения s.

Воздействие на асинхронный двигатель может осуществляться как со стороны статора, так и со стороны ротора. Все три способа нашли широкое применение на практике. Рассмотрим эти способы подробнее.
Регулирование частоты вращения асинхронных двигателей
Страница 17 из 51
Асинхронные двигатели являются основой современного электропривода переменного тока. Эффективность работы этого электропривода во многом определяется возможностями регулирования частоты вращения.
Возможности асинхронных двигателей в отношении регулирования частоты вращения ротора определяются выражением
Из этого выражения следует, что частоту вращения можно регулировать тремя способами: путем изменения частоты , числа пар полюсов p и скольжения s. Рассмотрим каждый из этих способов подробнее.
Регулирование частоты вращения изменением частоты подводимого напряжения
Этот способ является в настоящее время наиболее перспективным. Изменение частоты осуществляется с помощью полупроводникового преобразователя частоты (рис. 4.28, а). Одновременно с изменением частоты регулируют и напряжение , так чтобы обеспечить постоянство магнитного потока . Из выражения, связывающего напряжение с потоком Ф,
Изменение частоты осуществляется с помощью полупроводникового преобразователя частоты (рис. 4.28, а). Одновременно с изменением частоты регулируют и напряжение , так чтобы обеспечить постоянство магнитного потока . Из выражения, связывающего напряжение с потоком Ф,
,
следует, что напряжение необходимо регулировать пропорционально частоте
.
Отклонение от этого закона приводит к изменению потока Ф, что нежелательно. Действительно, при увеличении потока возрастает насыщение магнитной цепи, растут потери в стали и намагничивающий ток. Уменьшение потока вызывает уменьшение максимального момента двигателя и ряд других нежелательных явлений.
 Однако стоимость этого способа регулирования частоты вращения двигателя весьма высока, так как преобразователь частоты должен быть выполнен на полную мощность двигателя.
Однако стоимость этого способа регулирования частоты вращения двигателя весьма высока, так как преобразователь частоты должен быть выполнен на полную мощность двигателя.Регулирование частоты вращения изменением числа пар полюсов
Этот способ регулирования в отличие от предыдущего позволяет осуществить изменение частоты вращения только ступенями. Он используется в таких механизмах, как воздуходувки, транспортеры, подъемники, лифты. Двигатели с переключением числа пар полюсов называют многоскоростными. Обычно многоскоростные асинхронные двигатели выполняются с двумя, тремя и четырьмя ступенями скоростей. Двухскоростные двигатели изготавливаются с одной обмоткой, если числа пар полюсов соответствуют следующему отношению:
.
Трех- и четырехскоростные двигатели выпускаются с двумя обмотками. В трехскоростных двигателях только одна обмотка выполняется с переключением числа пар полюсов , а в четырехскоростных обе обмотки выполняются как двухскоростные. Обмотка ротора многоскоростных двигателей выполняется короткозамкнутой. Для нее не требуется переключения схемы соединения, так как необходимое число пар полюсов обмотки ротора образуется автоматически полем статора.
Обмотка ротора многоскоростных двигателей выполняется короткозамкнутой. Для нее не требуется переключения схемы соединения, так как необходимое число пар полюсов обмотки ротора образуется автоматически полем статора.
Изменение числа полюсов осуществляется путем изменения схемы соединения секций обмотки статора. На рис. 4.29 показаны три варианта соединения секций.
Вариант «а» соответствует последовательному согласному включению секций, при этом образуется магнитное поле с полюсами. В варианте «б» вторая секция включается встречно-последовательно. Результирующее поле имеет полюса. Мощность обмотки остается неизменной, , а момент, развиваемый двигателем, снижается в два раза, . В варианте «в» вторая секция включается встречно-параллельно. Результирующее поле также будет иметь полюса, но мощность обмотки возрастает в два раза, а момент двигателя остается постоянным .
Таким образом, для изменения числа пар полюсов в отношении необходимо, чтобы каждая фаза обмотки состояла из двух одинаковых частей. Когда обе части обтекаются токами одинакового направления, число полюсов , при изменении направления тока в одной из них число полюсов уменьшается вдвое, . При переключении числа полюсов с на полюсное деление уменьшается в два раза, при этом величина фазной зоны трехфазной обмотки меняется с 60° на 120° (рис. 4.30).
Когда обе части обтекаются токами одинакового направления, число полюсов , при изменении направления тока в одной из них число полюсов уменьшается вдвое, . При переключении числа полюсов с на полюсное деление уменьшается в два раза, при этом величина фазной зоны трехфазной обмотки меняется с 60° на 120° (рис. 4.30).
Малый шаг приводит к ухудшению использования обмотки и, следовательно, к некоторому снижению технико-экономических показателей двигателя.
Многоскоростные двигатели проектируются для различных режимов работы. Наиболее часто встречаются режимы с постоянным моментом и с постоянной мощностью . Регулирование частоты вращения с постоянным моментом обеспечивается при переключении обмотки со звезды на схему двойной звезды (рис.

При таком переключении в два раза возрастает потребляемый из сети ток, а следовательно, и мощность двигателя , момент же при этом не меняется.
Если до переключения обмотка статора была соединена в треугольник (рис. 4.32), то после переключения ее на двойную звезду мощность двигателя практически не изменится, а момент уменьшится в два раза из-за увеличения частоты вращения.
Регулирование частоты вращения изменением скольжения
Изменять скольжение асинхронного двигателя можно разными способами: изменением подводимого к статору напряжения, введением сопротивления в цепь ротора или введением в цепь ротора дополнительной ЭДС.
При изменении напряжения статора механическая характеристика двигателя изменяется, как показано на рис. 4.33. Снижение напряжения приводит к уменьшению жесткости механической характеристики и росту скольжения. При этом частота вращения ротора снижается,
.
.
Основным недостатком этого способа регулирования частоты вращения является низкий КПД из-за роста потерь в обмотке ротора пропорционально частоте скольжения
.
Поэтому он применяется только для двигателей малой мощности, работающих в системах автоматического управления.
В двигателях с фазным ротором изменить частоту вращения можно путем изменения сопротивления в роторе (рис. 4.34).
Преимущество данного способа регулирования частоты состоит в том, что максимальный момент остается неизменным. Важно также отметить, что часть потерь двигателя выносится в резистор, тем самым облегчается тепловой режим двигателя. В остальном способ аналогичен предыдущему и характеризуется низким КПД., малым диапазоном регулирования, зависящим от нагрузки, и «мягкой» механической характеристикой.
Чтобы повысить КПД двигателя при регулировании частоты вращения путем изменения скольжения, необходимо мощность скольжения использовать для совершения полезной работы или возвратить обратно в сеть. Схемы, реализующие эту идею, называются каскадными. Одной из распространенных схем данного типа является схема асинхронно-вентильного каскада (рис. 4.35).
Схемы, реализующие эту идею, называются каскадными. Одной из распространенных схем данного типа является схема асинхронно-вентильного каскада (рис. 4.35).
Схема включает асинхронный двигатель с фазным ротором (АД), диодный выпрямитель (Д), сглаживающий дроссель (Др), тиристорный инвертор (И) и сетевой согласующий трансформатор (Тр). Регулирование частоты вращения осуществляется посредством изменения напряжения инвертора. Это приводит к соответствующему изменению напряжения обмотки ротора, а следовательно, и частоты вращения ротора. Мощность частоты скольжения, извлекаемая из роторной обмотки двигателя, передается в сеть через согласующий трансформатор.
Достоинством каскадных схем регулирования частоты вращения асинхронных двигателей по сравнению с частотными схемами управления в статорной цепи (рис. 4.28) является то, что полупроводниковый преобразователь выполняется на мощность скольжения, а не на полную мощность двигателя. Это обстоятельство особенно важно для мощных и сверхмощных приводов насосов, прессов, конвейеров, подъемных механизмов и др. , где требуется ограниченный диапазон регулирования частоты вращения (2:1 и менее).
, где требуется ограниченный диапазон регулирования частоты вращения (2:1 и менее).
Асинхронно-вентильный каскад с неуправляемым выпрямителем допускает регулирование только вниз от синхронной частоты вращения. Если использовать управляемый выпрямитель, то можно осуществить регулирование частоты вращения вверх от синхронной. В этом случае направление передачи мощности скольжения меняется на противоположное.
Асинхронный двигатель
Если поместить во вращающееся магнитное поле короткозамкнутую медную или алюминиевую рамку на валу электродвигателя, то она вместе с валом придет во вращение по направлению вращения поля. Явление это объясняется следующим образом. Пусть угловая скорость вращения рамки n несколько меньше угловой скорости вращения поля no (асинхронное вращение). В этом случае рамка «проскальзывает» относительно поля. Величину s = (n0—n)/n0 называют скольжением. Относительно магнитного поля рамка вращается с угловой скоростью, пропорциональной скольжению.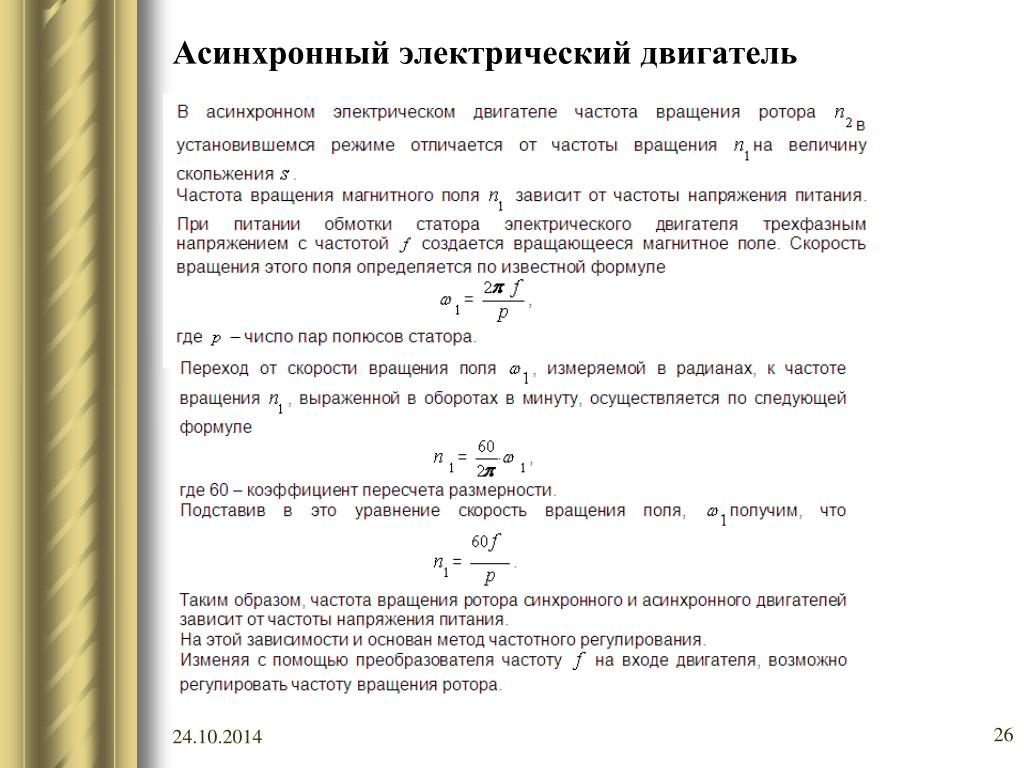 Поэтому в ней возникает индукционный ток, пропорциональный относительной скорости вращения рамки, т. е. скольжению. По закону Ленца, индуцированный ток взаимодействует с полем так, что рамка увлекается полем.
Поэтому в ней возникает индукционный ток, пропорциональный относительной скорости вращения рамки, т. е. скольжению. По закону Ленца, индуцированный ток взаимодействует с полем так, что рамка увлекается полем.
А так как магнитное поле вращается, то это приводит к вращению рамки. Вращающий момент, действующий на рамку, пропорционален индуцированному току и тем самым скольжению. Этот вращающий момент уравновешивается внешней нагрузкой. Таким образом, в установке данного типа рамка всегда вращается несколько медленнее вращения поля. Такое вращение называют асинхронным (т. е. неодновременным, несогласованным). Сам двигатель получил название асинхронного.
Асинхронный двигатель наиболее распространен в качестве электропривода различных механизмов благодаря своей простоте и надежности. Их применяют для привода машин и механизмов, не требующих строго постоянной частоты вращения и ее регулировки. Важнейшими достоинствами данного двигателя являются простота его устройства и большая надежность, вызванная отсутствием скользящих контактов. Двигатель имеет достаточный пусковой момент, легко реверсируется (т. е. в нем легко меняется направление вращения ротора). В результате этого асинхронные двигатели являются самыми распространенными в технике электрическими машинами. Более 60 % всей вырабатываемой в мире энергии преобразуется в механическую, в основном, с помощью асинхронных двигателей. Мощность двигателей колеблется от десятков ватт до сотен киловатт.
Двигатель имеет достаточный пусковой момент, легко реверсируется (т. е. в нем легко меняется направление вращения ротора). В результате этого асинхронные двигатели являются самыми распространенными в технике электрическими машинами. Более 60 % всей вырабатываемой в мире энергии преобразуется в механическую, в основном, с помощью асинхронных двигателей. Мощность двигателей колеблется от десятков ватт до сотен киловатт.
Асинхронный двигатель изготавливается в однофазном, двухфазном и трехфазном исполнении.
Принцип работы
Рассмотрим вращающееся поле переменного тока трехфазной цепи короткозамкнутого асинхронного двигателя с тремя обмотками, сдвинутыми по окружности на 120° и соединенными звездой .
Обмотки статора питаются симметричным трехфазным напряжением. Начальную фазу тока в обмотке А-х принимаем равной нулю. Тогда:
Конструкция
Асинхронный двигатель состоит из статора и ротора. Статор представляет собой литой корпус (стальной или чугунный) цилиндрической формы. Внутри статора располагается магнитопровод с вырубленными пазами, в которые укладывается статорная обмотка. Концы обмоток выводятся в клеммную коробку и могут быть соединены как треугольником, так и звездой. Корпус статора с торцов закрыт подшипниковыми щитами, в которые запрессовываются подшипники вала ротора. Ротор состоит из стального вала с напрессованным на него магнитопроводом.
Внутри статора располагается магнитопровод с вырубленными пазами, в которые укладывается статорная обмотка. Концы обмоток выводятся в клеммную коробку и могут быть соединены как треугольником, так и звездой. Корпус статора с торцов закрыт подшипниковыми щитами, в которые запрессовываются подшипники вала ротора. Ротор состоит из стального вала с напрессованным на него магнитопроводом.
По конструкции роторов двигатели делятся на две группы. Первая — с короткозамкнутым ротором и вторая — с фазным. У двигателя с короткозамкнутым ротором в пазы заливаются алюминиевые стержни и накоротко замыкаются по торцам. У фазового ротора имеются три обмотки, соединенные в звезду. Выводы обмоток присоединены к кольцам, закрепленным на валу. К кольцам при пуске прижимаются неподвижные щетки, к которым подключаются сопротивления. В начальный момент пуска ротор находится в заторможенном состоянии, затем сопротивление уменьшается и двигатель плавно запускается, что позволяет снизить пусковой ток.
К обмоткам статора подводится трехфазное напряжение, а ротор вращается посредством вращающегося магнитного поля, создаваемого системой трехфазного тока.
В момент времени t1: . Если ток фазы А положителен, т.е. течет от начала к концу, то, пользуясь правилом правоходового винта, можно найти картину распределения магнитного поля для времени t1.
В момент времени t2 вектор результирующей магнитной индукции Вm развернется на угол α1 и далее по часовой стрелке с периодом обращения 360°. Для данного примера угол α1 = 60°.
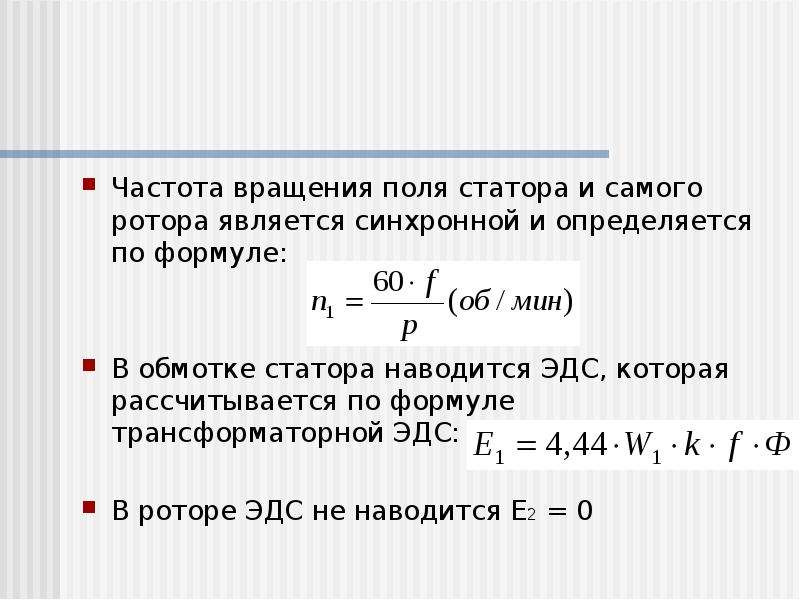
Таким образом, магнитная индукция представляет собой вращающееся поле с амплитудой
За период поле делает один оборот, , (где f = 50 Гц), и является промышленной частотой питающего переменного напряжения и тока.
При синусоидальном характере вращающегося поля его скорость no равна отношению αf/p (где р — число пар полюсов). В рассматриваемом примере р = 1 и частота вращения равна соответственно 3000 оборотам в минуту. Если число катушек в каждой фазе увеличить в два раза, а сдвиг фаз между токами сохранить 120°, то частота вращения уменьшится в два раза за счет увеличения числа пар полюсов. Особенностью короткозамкнутого асинхронного двигателя является наличие постоянной частоты вращения поля статора, определяемой числом пар полюсов.
Особенностью короткозамкнутого асинхронного двигателя является наличие постоянной частоты вращения поля статора, определяемой числом пар полюсов.
Если поменять местами любые две фазы, то возникнет поле обратной последовательности и ротор начнет вращаться в другую сторону. Еще одной особенностью асинхронных двигателей является разность частоты вращения полей статора no и ротора n, что делает возможным их электромагнитное взаимодействие. При этом поле ротора будет как бы скользить относительно поля статора
где s — скольжение, при номинальной мощности двигателя скольжение составляет 0,01-0,03.
Основное вращающееся магнитное поле индуцирует в обмотках статора и ротора ЭДС, аналогично трансформатору, так как при разомкнутом роторе асинхронный двигатель представляет собой трансформатор в режиме холостого хода:
где индекс 1 относится к параметрам статора, а 2 — к параметрам ротора; Kобм — обмоточные коэффициенты, определяемые способом укладки обмоток (петлевая или волновая).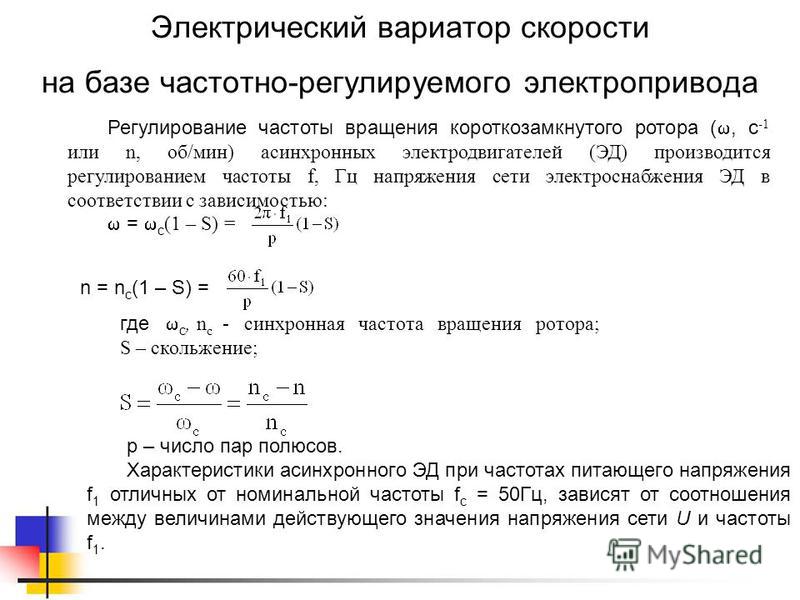 Kобм=0,92-0,98; E2s=E2s; E2 — действующее значение ЭДС неподвижного ротора при s = 1; f2=f1s.
Kобм=0,92-0,98; E2s=E2s; E2 — действующее значение ЭДС неподвижного ротора при s = 1; f2=f1s.
В асинхронном двигателе кроме основного магнитного потока создаются потоки рассеяния. Один охватывает проводники статора, другой — ротора. Потоки рассеяния характеризуются соответствующими индуктивными сопротивлениями X1 и X2s.
Уравнения электрического состояния фаз обмоток статора и ротора:
Момент асинхронного двигателя
Вращающий электромагнитный момент двигателя в соответствии с законом электромагнитных сил
где
Cм — конструктивная постоянная;
φ2s — фазовый сдвиг между током и магнитным потоком.
Отношение максимального момента Mmax к номинальному Mн определяет перегрузочную способность двигателя и составляет 2,0-2,2 (дается в каталожных данных).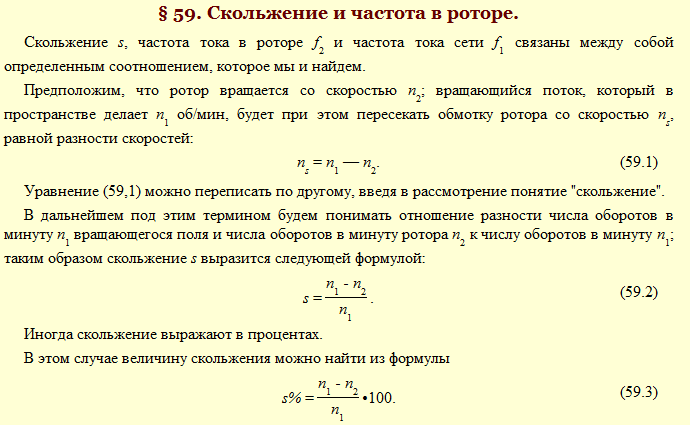 Максимальный момент соответствует критическому скольжению sк, определяемому активными и индуктивными сопротивлениями двигателя, и пропорционален активному сопротивлению цепи ротора.
Максимальный момент соответствует критическому скольжению sк, определяемому активными и индуктивными сопротивлениями двигателя, и пропорционален активному сопротивлению цепи ротора.
Потери в асинхронном двигателе
Потери делятся на потери в статоре и в роторе. Потери в статоре состоят из электрических потерь в обмотке Рэ1 и потерь в стали Рст, а потери в роторе — из электрических Рэ2 и механических Рмех плюс добавочные потери на трение и вентиляцию Рдоб.
где К = 2,9-3,6 определяется диаметром статора D1.
Потери в стали в рабочем режиме во много раз меньше электрических потерь в роторе и ими обычно пренебрегают.
КПД асинхронного двигателя составляет от 0,75 до 0,95.
Рабочий момент двигателя пропорционален квадрату напряжения, что необходимо учитывать при включении двигателя в протяженных распределительных сетях. Номинальному моменту соответствует номинальное скольжение, а пусковому — sп.
Номинальному моменту соответствует номинальное скольжение, а пусковому — sп.
Зависимость момента двигателя от скольжения М=f(s) приведена на рисунке.
На участке от 0 до Mmax двигатель работает в устойчивом режиме, а участок от Sk называется режимом опрокидывания двигателя, при котором двигатель в результате перегрузки останавливается и не может вернуться в рабочий режим без очередного запуска. Пусковые свойства двигателя определяются соотношением пускового момента Mп и номинального. В соответствии с каталожными данными оно составляет 1,6-1,7. При пуске асинхронного двигателя cosj очень мал и пусковой ток в обмотке статора может возрастать в 5-7 раз по сравнению с номинальным. Ограничение его осуществляется изменением частоты питающего напряжения для двигателя с короткозамкнутым ротором и увеличением активного сопротивления в цепи ротора для двигателя с фазовым ротором. Для механизмов, имеющих тяжелые условия пуска, где желательно использовать асинхронный двигатель с короткозамкнутым ротором, применяются двигатели с улучшенными пусковыми свойствами: с большим пусковым моментом и меньшим пусковым током, чем у двигателей общего назначения.
Механическая характеристика асинхронного двигателя
Зависимость скорости вращения от нагрузки на валу двигателя называется механической характеристикой асинхронного двигателя.
Участок АВ механической характеристики соответствует устойчивому режиму работы асинхронного двигателя. Увеличение нагрузки (тормозного момента) ведет к некоторому снижению частоты вращения ротора, что вызывает увеличение вращающего момента. При превышении тормозным моментом критического, двигатель останавливается. Точка В на графике соответствует точке критического или опрокидывающего момента.
Регулирование частоты вращения
Регулирование частоты вращения может быть осуществлено тремя способами: изменением частоты питающего напряжения, переключением числа пар полюсов и изменением скольжения.
Для регулирования частоты вращения двигателей с короткозамкнутым ротором в настоящее время широко используются частотные преобразователи с микропроцессорным управлением.
Тормозные режимы
Тормозные режимы возникают в машине при определенных условиях или создаются искусственно с целью ускорения процесса остановки двигателя. Торможение может быть:
Торможение может быть:
- генераторное с отдачей энергии в сеть;
- противовключением;
- динамическое.
Генераторным тормозным режимом называется режим работы двигателя, когда под действием внешнего момента ротор двигателя вращается в том же направлении, что и магнитное поле, но с большей скоростью.
Тормозной режим противовключения возникает в том случае, когда под действием внешнего момента, приложенного к валу двигателя, ротор вращается в противоположную сторону относительно вращающегося магнитного поля.
Динамический тормозной режим получается при отключении обмотки статора от сети трехфазного тока и подключении ее на время торможения к источнику энергии постоянного тока.
Выбор двигателя
Расчетные формулы для выбора двигателя имеют вид:
Выбор двигателя по каталогу осуществляется следующим образом. По заданному моменту рабочего механизма и частоте вращения определяется необходимая мощность. После этого определяются условия окружающей среды, выбирается исполнение по типу монтажа и высоте оси рабочего вала двигателя.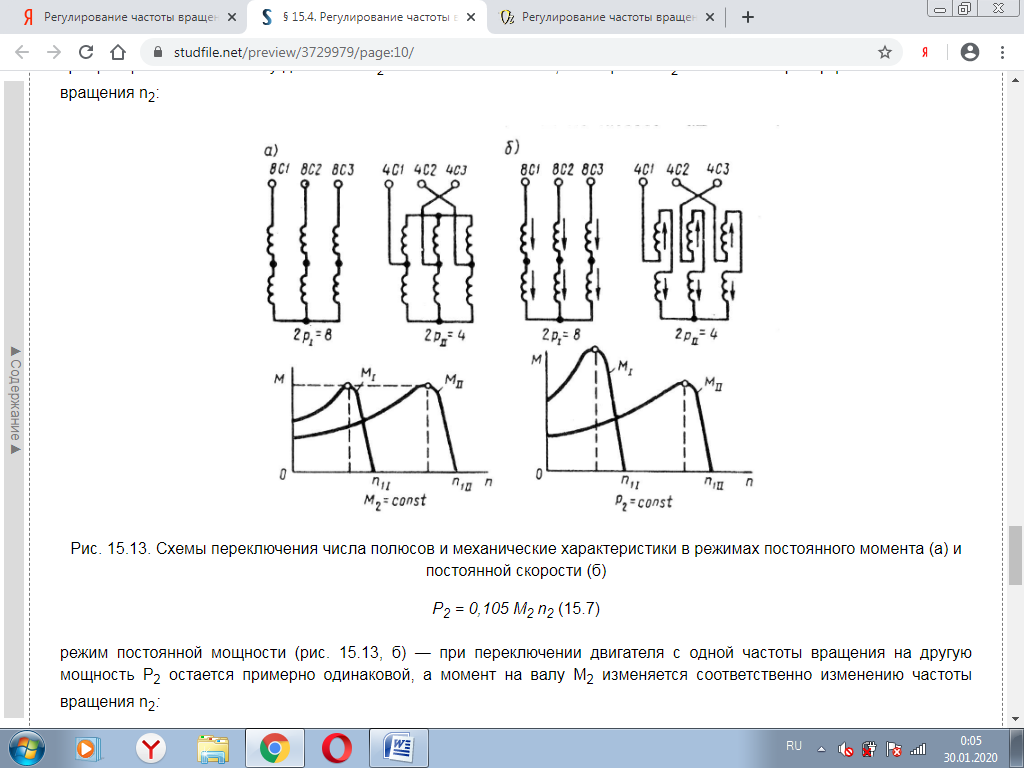 Зная эти параметры, по каталогу проверяют необходимую перегрузочную способность, КПД, массу и момент инерции.
Зная эти параметры, по каталогу проверяют необходимую перегрузочную способность, КПД, массу и момент инерции.
Для шахтных условий используются двигатели взрывозащищенного исполнения; для крановых механизмов — двигатели с повышенным скольжением и т.д.
В бытовых приборах используются однофазные двигатели. Однофазный двигатель отличается от трехфазного тем, что его статорная обмотка подключается к однофазному источнику питания. Ротор выполняется короткозамкнутым. На статоре размещаются две обмотки, оси которых смещены друг относительно друга на 90 электрических градусов. Одна называется рабочей, а другая -пусковой.
Рабочие характеристики асинхронного двигателя
Рабочими характеристиками асинхронного двигателя являются зависимости от мощности на валу Р2 таких параметров, как момент, частота вращения, ток статора, КПД и cosφ. Анализ характеристик показывает, что частота вращения ротора падает с увеличением нагрузки, а момент пропорционален ей. Ток статора изменяется по нелинейному закону, что связано с магнитной системой двигателя и при Р2=0 определяется током холостого хода, составляющего до 40% его номинального значения.
Ток статора изменяется по нелинейному закону, что связано с магнитной системой двигателя и при Р2=0 определяется током холостого хода, составляющего до 40% его номинального значения.
В системах управления используются двигатели, в которых одна из обмоток статора постоянно подключена к сети переменного тока (обмотка возбуждения), а ко второй (обмотка управления) подводится напряжение управления. Такие двигатели относятся к классу микромашин.
Микромашины используются в информационных системах, где они выполняют функции первичных преобразователей для вычислительных операций в системах автоматики и телемеханики.
Одним из примеров является сельсин, предназначенный для передачи на расстояние угловых перемещений валов, механически не связанных друг с другом. По конструкции сельсины делятся на контактные и бесконтактные. Контактные сельсины выполняются в двух вариантах. В одном обмотка возбуждения располагается на роторе, а трехфазная обмотка, называемая обмоткой синхронизации, в пазах статора. В другом варианте наоборот. При включении обмотки возбуждения сельсина на однофазное напряжение ток создает пульсирующее магнитное поле, которое индуцирует в каждой фазе обмотки синхронизации переменную ЭДС. Действующее значение ЭДС каждой фазы зависит от расположения осей этих фаз относительно оси потока возбуждения.
В другом варианте наоборот. При включении обмотки возбуждения сельсина на однофазное напряжение ток создает пульсирующее магнитное поле, которое индуцирует в каждой фазе обмотки синхронизации переменную ЭДС. Действующее значение ЭДС каждой фазы зависит от расположения осей этих фаз относительно оси потока возбуждения.
В простейшем случае схема дистанционной передачи угловых перемещений состоит из двух одинаковых сельсинов, у которых одноименные зажимы обмоток синхронизации соединены проводами линии связи, а на обмотки возбуждения подается напряжение сети. Один из сельсинов называют сельсин-датчиком, другой — сельсин-приемником.
Принцип действия электродвигателей
Принцип действия
Асинхронный двигатель с короткозамкнутым ротором
Обмотка ротора состоит из медных или алюминиевых стержней, замкнутых накоротко с торцов двумя кольцами (беличья клетка).
Обмотка статора (обмотка возбуждения) питается от сети переменным током – образуется вращающееся магнитное поле,
которое индуцирует в обмотках ротора ток. На проводники с током обмотки ротора со стороны магнитного поля обмотки возбуждения действуют электромагнитные силы –
образуется вращающий момент, увлекающий ротор за магнитным полем.
Частота вращения ротора не может достигнуть частоты вращения магнитного поля статора (поэтому электродвигатель и
называется асинхронным), в противном случае угловая скорость вращения магнитного поля относительно обмотки ротора
станет равной нулю и магнитное поле перестанет индуцировать в обмотке ротора ЭДС и создавать крутящий момент.
На проводники с током обмотки ротора со стороны магнитного поля обмотки возбуждения действуют электромагнитные силы –
образуется вращающий момент, увлекающий ротор за магнитным полем.
Частота вращения ротора не может достигнуть частоты вращения магнитного поля статора (поэтому электродвигатель и
называется асинхронным), в противном случае угловая скорость вращения магнитного поля относительно обмотки ротора
станет равной нулю и магнитное поле перестанет индуцировать в обмотке ротора ЭДС и создавать крутящий момент.
Асинхронный двигатель с фазным ротором
Обмотки ротора выводятся на контактные кольца, вращающиеся вместе с валом машины. С помощью металлографитовых щёток, скользящих по этим кольцам, в цепь обмотки ротора включается пускорегулирующий реостат. Увеличивая сопротивление реостата в момент пуска, можно увеличить пусковой момент и снизить пусковой ток.
Синхронные электродвигатели
Обмотка статора (якорная обмотка) питается от сети переменным током – образуется вращающееся магнитное поле. На роторе находится индукторная обмотка, выведенная на контактные кольца.
При пуске обмотки ротора закорачиваются накоротко или через реостат, и двигатель разгоняется в асинхронном режиме.
После выхода на скорость, близкую к номинальной, индуктор запитывается постоянным током – создаётся постоянное
магнитное поле, которое сцепляется с магнитным полем статора и начинает вращаться с ним синхронно (двигатель входит в
синхронизм).
На роторе находится индукторная обмотка, выведенная на контактные кольца.
При пуске обмотки ротора закорачиваются накоротко или через реостат, и двигатель разгоняется в асинхронном режиме.
После выхода на скорость, близкую к номинальной, индуктор запитывается постоянным током – создаётся постоянное
магнитное поле, которое сцепляется с магнитным полем статора и начинает вращаться с ним синхронно (двигатель входит в
синхронизм).
Режимы работы асинхронного двигателя
- Двигательный
- Генераторный
- Электромагнитного тормоза
Электродвигатель преобразует электрическую энергию, потребляемую из сети, в механическую.
Асинхронный двигатель переходит в генераторный режим, если ротор начинает вращаться быстрее магнитного поля – на валу появляется тормозной момент. В этом режиме электродвигатель преобразовывает механическую энергию в электрическую и отдаёт её в сеть.
Асинхронный двигатель переходит в режим электромагнитного тормоза, если ротор и магнитное поле статора вращаются в
разные стороны – на валу появляется тормозной момент, но двигатель при этом продолжает потреблять
электроэнергию из сети – вся потребляемая энергия идёт на нагрев двигателя.
Способы регулирования скорости вращения асинхронного двигателя
- Реостатное
- Изменением числа пар полюсов
В многоскоростных двигателях, по-разному коммутируя обмотки статора, можно менять число пар полюсов, а значит и скорость вращения вала, т.к. скорость вращения магнитного поля пропорциональна числу пар полюсов. При этом способе сохраняется КПД и жёсткость механических характеристик, но снижается перегрузочная способность (которую можно сохранить, изменяя напряжение).
Недостатки: ступенчатое регулирование, высокая цена, большие габариты.
- Частотное
В цепь ротора (двигателя с фазным ротором) вводятся добавочные сопротивления – механическая характеристика двигателя
становится мягче (ухудшается устойчивость работы, увеличивается скольжение), скорость снижается, при этом увеличивается
пусковой момент и сохраняется перегрузочная способность.
Недостатки: большие потери на реостате, скорость меняется скачками.
Для этого способа регулирования применяются преобразователи частоты.
Если при изменении частоты сохранять неизменным магнитный поток (а для этого мы должны поддерживать постоянным
соотношение U/f), то мы получаем семейство механических характеристик с одинаковой жёсткостью и перегрузочной способностью.
Преимущества: плавность регулирования, отличные экономические характеристики, возможность увеличивать частоту выше 50 Гц
(частоты сети).
Как выбрать электродвигатель
Обмотка ротора
- Короткозамкнутый ротор (беличья клетка)
- Фазный ротор: обмотка ротора выведена на контактные кольца, вращающиеся с валом двигателя. С помощью металлографитовых щёток в цепь ротора включается пуско-регулирующий реостат. С помощью этого реостата можно уменьшить пусковой ток и регулировать скорость вращения вала двигателя.
Обмотка статора, напряжение питания
Обмотка статора может быть соединена по схеме «звезда» или «треугольник».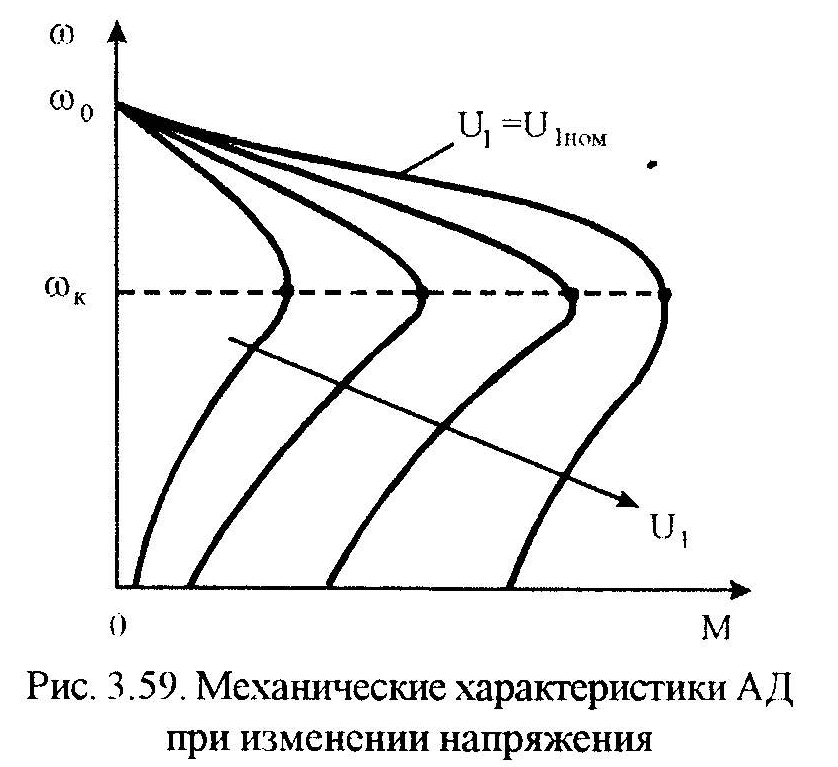
Если на шильдике двигателя написано: 220/380, D/Y, то это значит, что двигатель можно включать в сеть с Uл = 220 В по схеме «треугольник»,
а с Uл = 380 В – по схеме «звезда».
Для IEC двигателей стандартное напряжение – 230/400 В, а для отечественных – 220/380 В.
Типоразмер
Типоразмер или габарит (Frame size) – это расстояние в миллиметрах «от пола» до оси вала двигателя. Типоразмеры отечественных двигателей (ГОСТ) и импортных (IEC, NEMA) в общем случае не совпадают: наши двигатели ниже, чем импортные той же мощности.
Материал корпуса (станины)
- Алюминий (Aluminium)
- Чугун (Cast Iron).
Коэффициент полезного действия (Efficiency)
КПД η равен отношению механической мощности на валу двигателя P2 к потребляемой из сети электрической мощности P1.
P1 = √3 х U х I х cos φ
P2 = M х n / 9,55
η = P2 / P1
Выходная мощность меньше входной на величину потерь.
Класс энергоэффективности
- EFF1 (High Efficiency motors)
- EFF2 (Improved Efficiency motors)
- EFF3 (Conventional Efficiency motors).
Монтажное исполнение
- Лапы (Foot) литые с корпусом или прикручиваемые
- Фланцы (Flange) с врезными отверстиями (малые фланцы) или со сквозными (большие фланцы)
- Комбинированные – лапы и фланец.
Конструктивное исполнение по способу монтажа электродвигателей
Класс защиты корпуса двигателя IP
Стандартная степень защиты электродвигателей – IP55.
Подробнее о расшифровке кодов IP
Скорость вращения
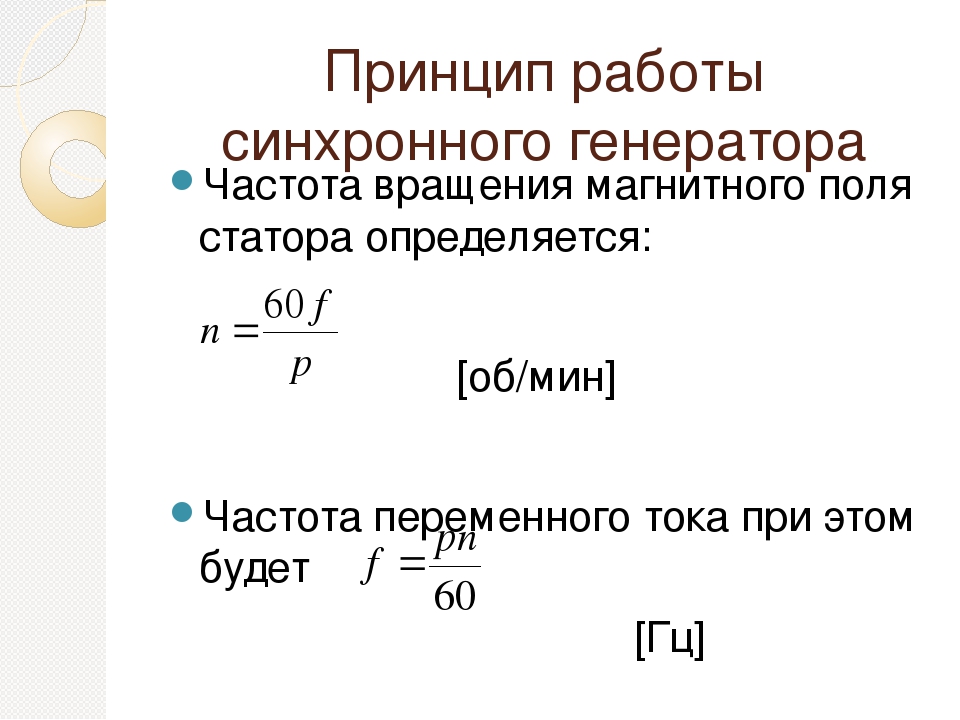
Скорость вращения магнитного поля двигателя (синхронная скорость):
n1 = 60f / p [об/мин],
где p – число пар полюсов двигателя,
f – частота сети (50 Гц).
- 2 полюса – 3000 об/мин
- 4 полюса – 1500 об/мин (стандарт)
- 6 полюсов – 1000 об/мин
- 8 полюсов – 750 об/мин
- 10 полюсов – 600 об/мин
- 12 полюсов – 500 об/мин.
Скорость вращения ротора асинхронного двигателя меньше скорости вращения магнитного поля:
n2 = n1(1 – s),
где s – скольжение.
Многоскоростные электродвигатели – это двигатели, у которых ступенчатое изменение скорости реализовано с помощью переключения числа пар полюсов.
Температура окружающей среды и высота над уровнем моря
При установке двигателя выше 1000 метров над уровнем моря и при эксплуатации при повышенной температуре окружающей среды необходимо учитывать снижение (Derating) мощности двигателя (для этого есть специальные таблицы).
Класс нагревостойкости изоляции
- B – 130° С
- F – 150° С (достаточно для работы от преобразователя частоты)
- H – 180° С
Номинальные характеристики двигателя для всех классов изоляции указываются для температуры охлаждающей среды +40°С.
Подробнее о классах нагревостойкости изоляции
Режим нагрузки (Duty)
- S1 – продолжительный: двигатель работает при установившейся температуре
- S2 – кратковременный: двигатель не успевает нагреться до установившейся температуры, но во время остановки успевает полностью охладиться
- S3 – повторно-кратковременный: работа с постоянной нагрузкой чередуется с выключениями, при этом двигатель не успевает ни нагреться, ни охладиться до установившейся температуры
- S4 – повторно-кратковременный с длительными пусками: двигатель не успевает ни нагреться, ни охладиться до установившейся температуры
- S5 – повторно-кратковременный с длительными пусками и электрическим торможением: двигатель не успевает ни нагреться, ни охладиться до установившейся температуры
- S6 – перемежающийся: работа с постоянной нагрузкой чередуется с работой на холостом ходу, при этом двигатель не успевает ни нагреться, ни охладиться до установившейся температуры
- S7 – перемежающийся с длительными пусками и торможениями: двигатель не успевает ни нагреться, ни охладиться до установившейся температуры
- S8 – перемежающийся с периодическим изменением скорости вращения: двигатель не успевает ни нагреться, ни охладиться до установившейся температуры
Тепловая защита двигателя
- PTC-термисторы – это резисторы, сопротивление которых мгновенно возрастает при достижении заданной температуры.
 От 1 до 3 термисторов соединяются последовательно для сигнализации температуры отключения (Trip), например, 155°C.
Ещё одна цепочка термисторов может быть настроена на сигнал предупреждения (Alarm), например, 145°C.
От 1 до 3 термисторов соединяются последовательно для сигнализации температуры отключения (Trip), например, 155°C.
Ещё одна цепочка термисторов может быть настроена на сигнал предупреждения (Alarm), например, 145°C. - PT100 – платиновые датчики температуры обладают высокой стойкостью к окислению и большой точностью измерения.
PT100 подключаются по 2-х, 3-х или 4-х проводной схеме (чем больше проводов – тем меньше влияние помех).
От 3 до 6 датчиков PT100 могут устанавливаться в обмотку статора.
Для измерения температуры подшипников могут быть использованы ещё 2 датчика PT100. - KTY – кремниевые термодатчики с положительным коэффициентом сопротивления, характеризуются высокой линейностью характеристики, высоким быстродействием, надёжной твёрдотельной конструкцией и небольшой стоимостью.
Сервис-фактор
Двигатель с сервис-фактором 1.1 может постоянно работать с перегрузкой 10% от номинального выходного момента.
Класс по моменту (Torque class)
Класс по моменту показывает кратность пускового момента (при прямом пуске от сети) при пониженном на 5% напряжении:
- Класс 16 – 160%
- Класс 13 – 130%
- Класс 10 – 100%
- Класс 7 – 70%
- Класс 5 – 50%
Коэффициент мощности cos φ
Коэффициент мощности (cos φ) равен отношению потребляемой двигателем активной мощности к полной мощности.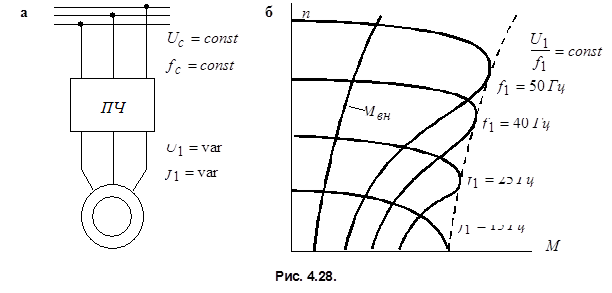
Активная мощность расходуется на совершение полезной работы.
Полная мощность равна геометрической сумме активной и реактивной мощности.
Реактивная мощность расходуется на намагничивание двигателя.
Антиконденсационный нагрев
Для того, чтобы перед пуском двигателя в сыром помещении просушить обмотки есть два способа:
- Использовать двигатель со специальным встроенным нагревателем
- Подать на одну обмотку статора напряжение от 4 до 10% номинального (чтобы пропустить ток от 20 до 30% от номинального), что достаточно для испарения конденсата (применимо не для всех двигателей). Некоторые преобразователи частоты умеют это делать.
Охлаждение
- Поверхностное охлаждение (Non-ventilated: вентилятора нет)
- Самовентиляция (Self-ventilated: вентилятор на валу двигателя)
- Принудительное охлаждение (Forced cooling: независимый вентилятор или жидкостное охлаждение водой или маслом)
Для турбомеханизмов (вентиляторы и насосы, для которых момент на валу пропорционален квадрату скорости),
как правило, достаточно самовентиляции.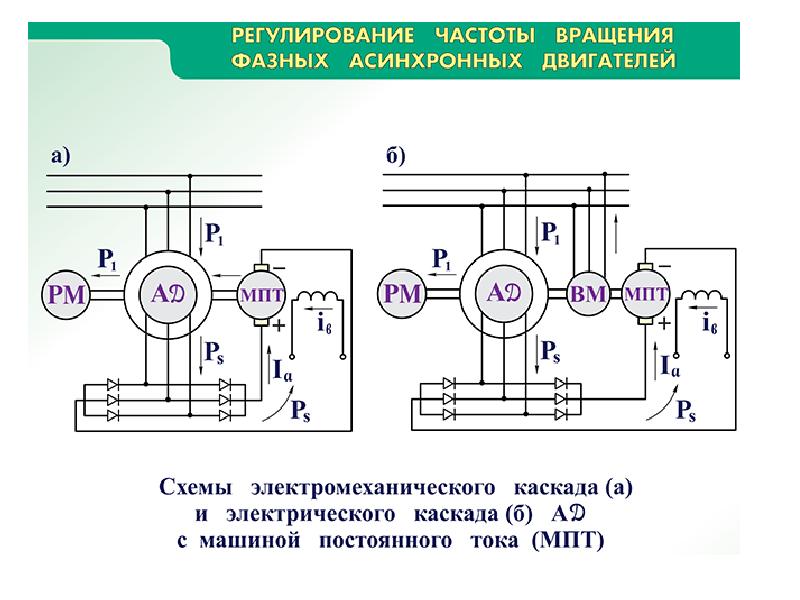
Двигатели, которые работают от преобразователей частоты с постоянным моментом длительное время на низких скоростях,
необходимо или переразмеривать, или обеспечить принудительным охлаждением.
Вентилятор
- Пластиковый
- Металлический
- Металлический с увеличенным моментом инерции
Требования к двигателю при работе от преобразователя частоты
- Температурный класс изоляции не ниже F
- Возможно принудительная вентиляция (см. выше)
- Изолированный подшипник с нерабочей стороны вала (рекомендуется для типоразмеров 225 и выше)
Подшипники
При работе от преобразователя частоты на частотах выше 50 Гц срок службы подшипников уменьшается.
У одних двигателей с рабочей стороны вала установлен плавающий подшипник (Floating bearing),
а с нерабочей стороны подшипник зафиксирован (Located bearing).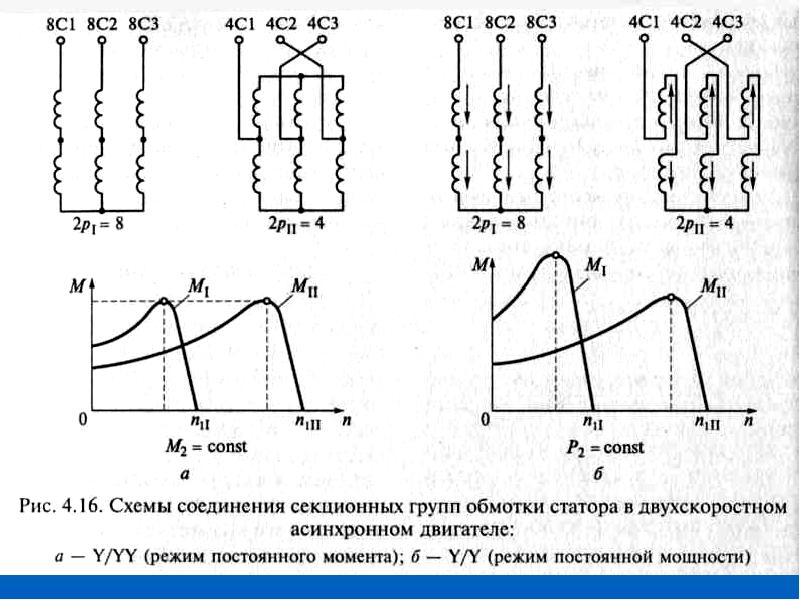 У других – наоборот (для сочленения с редуктором, например).
У других – наоборот (для сочленения с редуктором, например).
В стандартном исполнении подшипники подпружинены в аксиальном направлении (вдоль вала) для обеспечения равномерной работы двигателя. У двигателей с радиально-упорными подшипниками такой пружины нет, поэтому радиальное усилие (перпендикулярно валу – от ремня, например) должно быть приложено постоянно, иначе подшипник быстро выйдет из строя.
Смазка
Как правило, для двигателей с типоразмерами до 250, работающих в номинальном режиме,
смазка рассчитана на весь срок службы подшипников.
Для пополнения смазки у двигателя должен быть предусмотрен специальный ниппель.
Вал двигателя
У двигателя может быть выведен второй конец вала двигателя, который может передавать как номинальный, так и меньший момент.
Второй конец вала несовместим с такими опциями как: датчик скорости и вентилятор принудительного охлаждения, а, возможно, и с тормозом.
Тормоз
При выборе тормоза необходимо учесть:
- Тип:
- статический (удерживающий тормоз срабатывает только при неподвижном вале)
- динамический (можно регулировать момент торможения, меньше изнашивается в случае аварийного торможения)
- Максимальную скорость, при которой возможно аварийное торможение
- Момент нагрузки
- Момент инерции
- Число пусков
- Напряжение питания: переменное (~220В) или постоянное (=24В)
- Скорость срабатывания: тормоз с выключением на DC-стороне срабатывает быстрее (для подъёмника, например), чем тормоз с выключением на AC-стороне (для конвейера)
Датчик скорости
Датчик скорости может находится герметично внутри корпуса (Incapsulated) или снаружи под защитной крышкой.
Сервопривод
Устройства плавного пуска
асинхронный двигатель общепромышленного применения – Юг-привод
ПРЕОБРАЗОВАТЕЛИ ЧАСТОТЫ И АСИНХРОННЫЕ ДВИГАТЕЛИ ОБЩЕПРОМЫШЛЕННОГО ПРИМЕНЕНИЯ
Иногда наши Заказчики спрашивают, могут ли асинхронные двигатели общепромышленного применения работь с преобразователями частоты. Технические условия завода-изготовителя не предусматривают испытания стандартного асинхронного двигателя при питании его от преобразователя частоты, поэтому Международным электротехническим комитетом был принят стандарт МЭК 34-17 «Асинхронные двигатели с короткозамкнутым ротором, которые питаются от преобразователей частоты». Первая редакция стандарта была выпущена в 1992 году, вторая в 1998 году. В первой редакции МЭК 34-17 были введены дополнительные проверки, которые состоят из трех групп:
• 1 группа – Общая проверка двигателя при питании от преобразователя частоты;
• 2 группа – Проверка двигателя при частоте вращения ротора выше номинальной, при питании от преобразователя частоты;
• 3 группа – Проверка двигателя при частоте вращения ротора ниже номинальной, при питании от преобразователя частоты.
Проверки должны проводиться на заводе-изготовителе электродвигателей или на заводе-изготовителе преобразователей частоты по требованию заказчика. Что вынуждает проводить эти проверки?
1. Выходное напряжение преобразователя частоты имеет форму ШИМ – сигнала, а кабель, соединяющий преобразователь частоты и двигатель, может иметь длину 100 м. и более. Если волновое сопротивление кабеля и обмотки двигателя не согласованы, а скорость нарастания выходного напряжения dU/dt высокая, то происходит отражение волны напряжения в оба конца кабеля. Это отражение увеличивает пики напряжения на клеммах двигателя, что может привести к пробою изоляции. Некоторые заводы-изготовители преобразователей частоты проводят их проверку с двигателями общепромышленного применения, и обязательно указывают максимально допустимую длину кабеля. При выборе преобразователя частоты на этот параметр необходимо обратить особое внимание, так как возможное разочарование может длиться намного дольше, чем удовольствие от низкой цены!
Такой подход привел к созданию специальных алгоритмов управления, которые позволяют без ограничений использовать асинхронные двигатели общепромышленного применения с длиной кабеля между преобразователем частоты и двигателем до 300 м.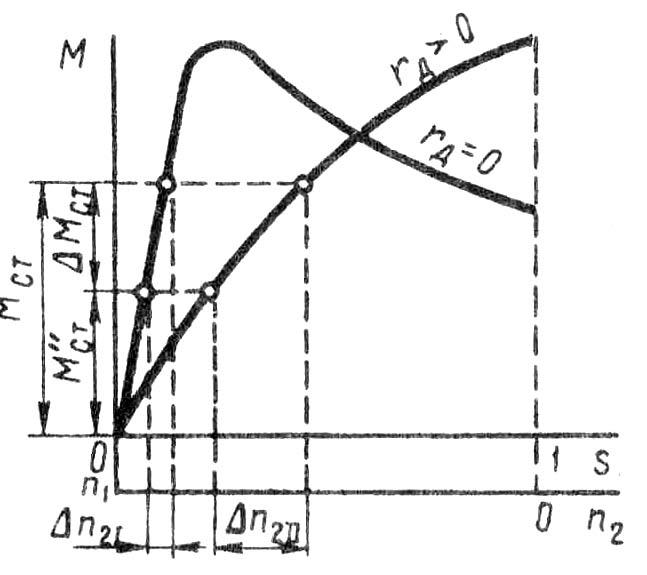 А если возникнет необходимость в установке двигателя на еще большее расстояние, или двигатель имеет повышенные требования к нагрузке изоляции? В таких случаях используют выходные фильтры dU/dt, или выходные LC – фильтры (синусные фильтры). Компания Юг-привод поставляет такие фильтры, разработанные специально для преобразователей частоты.
А если возникнет необходимость в установке двигателя на еще большее расстояние, или двигатель имеет повышенные требования к нагрузке изоляции? В таких случаях используют выходные фильтры dU/dt, или выходные LC – фильтры (синусные фильтры). Компания Юг-привод поставляет такие фильтры, разработанные специально для преобразователей частоты.
2. Некоторые приводные механизмы при регулировании скорости могут войти в механический резонанс. Во избежание проблем механического резонанса необходимо просто пропустить частоты, на которых возникает резонанс,
3. Скорость вращения двигателя при частотном регулировании может значительно отличаться от номинальной скорости. При работе двигателя на скоростях выше номинальной она не должна превышать 1-ю критическую частоту вращения стандартного двигателя, даже в случае жесткого соединения с нагрузкой на валу. Гарантийный резерв – не меньше 25% от критической частоты вращения. Невыполнение этого условия приводит к уменьшению ресурса работы подшипников двигателя, или к аварийной остановке. Допустимая максимальная частота вращения для стандартных двигателей зависит от их типоразмера и приведена в таблице.
Допустимая максимальная частота вращения для стандартных двигателей зависит от их типоразмера и приведена в таблице.
Типоразмер (высота оси вращения, мм) | Допустимая максимальная частота вращения, об/мин |
63-100 | 6000 |
112-200 | 4500 |
225-280 | 3600 |
315 (2 полюса) | 3600 |
315 – другие | 3000 |
355, 400 (2 полюса) | 3600 |
355, 400 – другие | 2500 |
При уменьшении частоты вращения ротора асинхронного короткозамкнутого самовентилируемого двигателя ниже номинальной, производительность вентилятора, закрепленного на роторе, также уменьшается, что ухудшает условия охлаждения двигателя и может привести к повышению температуры обмоток статора и подшипников.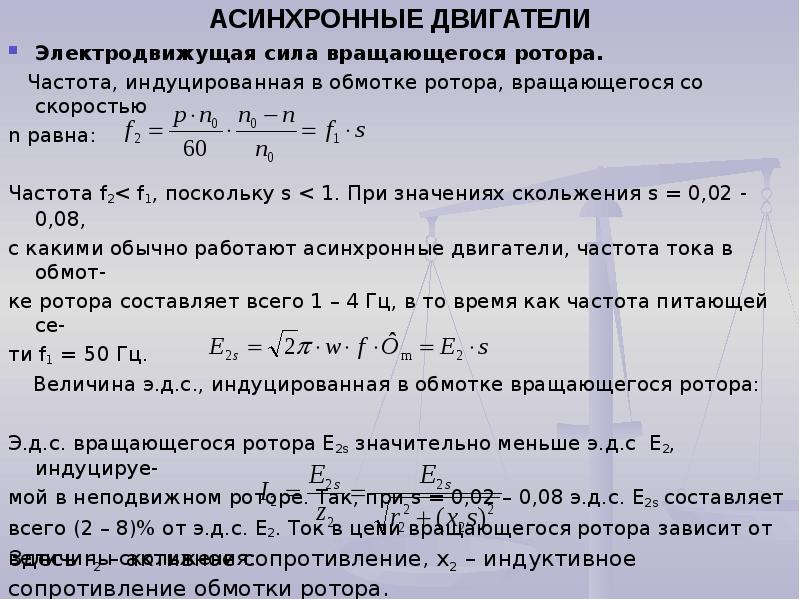 Это необходимо учитывать при проектировании частотно-регулируемого электропривода и обеспечить принудительную вентиляцию электродвигателя. Практика эксплуатации частотно-регулируемого электропривода систем вентиляции, водоснабжения и т.п. свидетельствует о том, что при вентиляторной характеристике нагрузки на низких скоростях двигатель не перегревается, так как при уменьшении скорости уменьшается и момент, а соответственно и ток двигателя.
Это необходимо учитывать при проектировании частотно-регулируемого электропривода и обеспечить принудительную вентиляцию электродвигателя. Практика эксплуатации частотно-регулируемого электропривода систем вентиляции, водоснабжения и т.п. свидетельствует о том, что при вентиляторной характеристике нагрузки на низких скоростях двигатель не перегревается, так как при уменьшении скорости уменьшается и момент, а соответственно и ток двигателя.
Преобразователи частоты для ваших приводов
Являясь одним из ведущих изготовителей приводной техники, к нашим механическим компонентам мы, конечно же, предлагаем и подходящую преобразовательную технику. Мы разрабатываем и производим приводные преобразователи и преобразователи частоты для управления и регулирования приводов в машинах и установках. И это не только для централизованного монтажа в электрошкафу или для настенного монтажа, но и для децентрализованного монтажа.
Что такое преобразователь частоты?
Преобразователи частоты – это электронные устройства, которые позволяют регулировать частоту вращения асинхронного двигателя.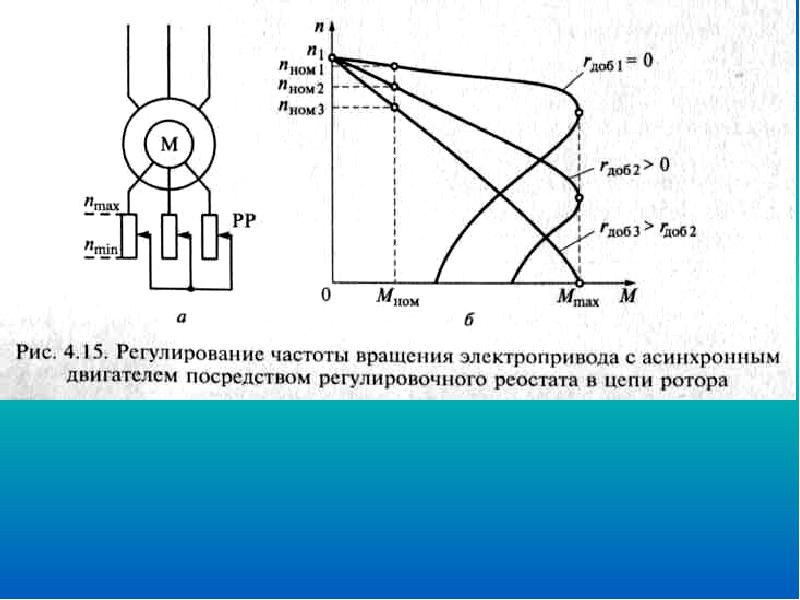 Обоснование: Если электрические машины или асинхронные двигатели работают непосредственно от сети переменного напряжения, у них есть только одна фиксированная частота вращения – в зависимости от числа полюсов и частоты местной электросети. Однако если приводной системе или производственному процессу требуется изменяемое переменное напряжение, т. е. регулируемая скорость, то применяются преобразователи частоты. Из фиксированного переменного напряжения они могут вырабатывать переменное напряжение с изменяемой амплитудой (величиной выходного напряжения) и частотой.
Обоснование: Если электрические машины или асинхронные двигатели работают непосредственно от сети переменного напряжения, у них есть только одна фиксированная частота вращения – в зависимости от числа полюсов и частоты местной электросети. Однако если приводной системе или производственному процессу требуется изменяемое переменное напряжение, т. е. регулируемая скорость, то применяются преобразователи частоты. Из фиксированного переменного напряжения они могут вырабатывать переменное напряжение с изменяемой амплитудой (величиной выходного напряжения) и частотой.
Как работает преобразователь частоты?
>Преобразователь частоты подключается перед двигателем, чтобы создавать соответствующее потребностям, изменяемое переменное напряжение. Таким образом, уже не электросеть создает частоту и величину напряжения, с которыми работает двигатель, а преобразователь частоты берет на себя эту задачу и регулирует выходную частоту и выходное напряжение.
Большое преимущество преобразователя частоты? С его помощью вы плавно изменяете частоту вращения двигателя почти от нуля до нужного номинального уровня и заметно расширяете ее диапазон.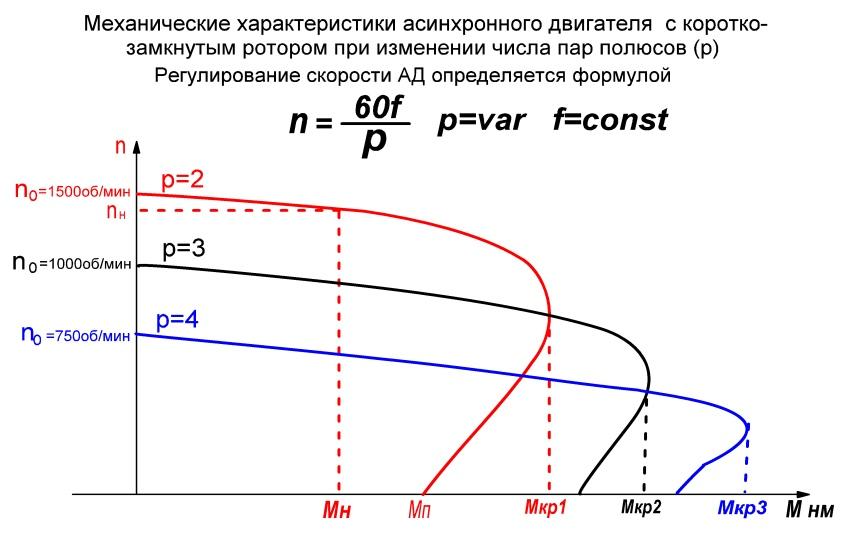 При этом вращающий момент двигателя остается неизменным. Таким образом пользователи оборудования всегда могут адаптировать свою приводную технику к текущим условиям. Кроме того, преобразователь частоты позволяет быстро менять направление вращения. Чтобы изменить порядок следования фаз, достаточно простого управляющего сигнала. После этого подключенный асинхронный двигатель будет работать в противоположном направлении.
При этом вращающий момент двигателя остается неизменным. Таким образом пользователи оборудования всегда могут адаптировать свою приводную технику к текущим условиям. Кроме того, преобразователь частоты позволяет быстро менять направление вращения. Чтобы изменить порядок следования фаз, достаточно простого управляющего сигнала. После этого подключенный асинхронный двигатель будет работать в противоположном направлении.
Какие типы преобразователей существуют?
Бывают преобразователи с управлением по току и с управлением по напряжению. В работе они различаются следующим образом:
- Преобразователи частоты с управлением по току поддерживают отношение тока к частоте (I/f) всегда постоянным и применяются в верхнем мегаваттном диапазоне.
- А в нижнем мегаваттном и в киловаттном диапазонах последним словом техники являются преобразователи частоты с управлением по напряжению. Они поддерживают на постоянном уровне отношение напряжения к частоте: То есть если двигатель, рассчитанный на напряжение 230 В и частоту 50 Гц, должен работать с частотой 25 Гц, то и напряжение уменьшается вдвое до 115 В.
Проще говоря, в преобразователе частоты с управлением по напряжению происходит следующее: На входе имеется выпрямитель, который преобразует переменное напряжение электросети в постоянное напряжение. Затем это постоянное напряжение сглаживается и стабилизируется звеном постоянного тока. Далее действующий со стороны двигателя инвертор генерирует переменное напряжение с выходной частотой, необходимой для приводной системы. Получаемое при этом отношение „напряжение/частота“ определяет необходимую частоту вращения двигателя. Задание или расчет необходимой частоты вращения выполняет встроенный блок управления, который соединяет друг с другом все компоненты.
Где применяются преобразователи?
Преобразователи частоты используются в самых разных отраслях и задачах промышленности. Будь то приводы насосов и вентиляторов, обрабатывающих станков, конвейеров и сборочных линий, кранов или роботизированных систем: представить себе промышленное производство без преобразователей частоты уже невозможно. Ведь там адаптированная или непрерывно регулируемая частота вращения обеспечивает оптимизированные технологические процессы – с тем дополнительным преимуществом, что приводы с регулированием частоты вращения способствуют экономии энергии при работе
Ведь там адаптированная или непрерывно регулируемая частота вращения обеспечивает оптимизированные технологические процессы – с тем дополнительным преимуществом, что приводы с регулированием частоты вращения способствуют экономии энергии при работе
Преобразователи для любых установок и машин
В зависимости от спроса и требований наши преобразователи частоты доступны в различных исполнениях и с множеством дополнительных функций. К тому же очень важно, где нужно разместить преобразователь частоты – на стене, в центральном и защищенном месте в электрошкафу или прямо в цеху, то есть децентрализованно. И в зависимости от того, насколько проста или сложна та или иная приводная система, применяются либо простые преобразователи частоты, либо так называемые специальные преобразователи с большим объемом функций или многоосевые сервоусилители
SEW-EURODRIVE был первой компанией, которая разработала децентрализованную технику и вывела на рынок соответствующие преобразователи частоты и мехатронные приводы.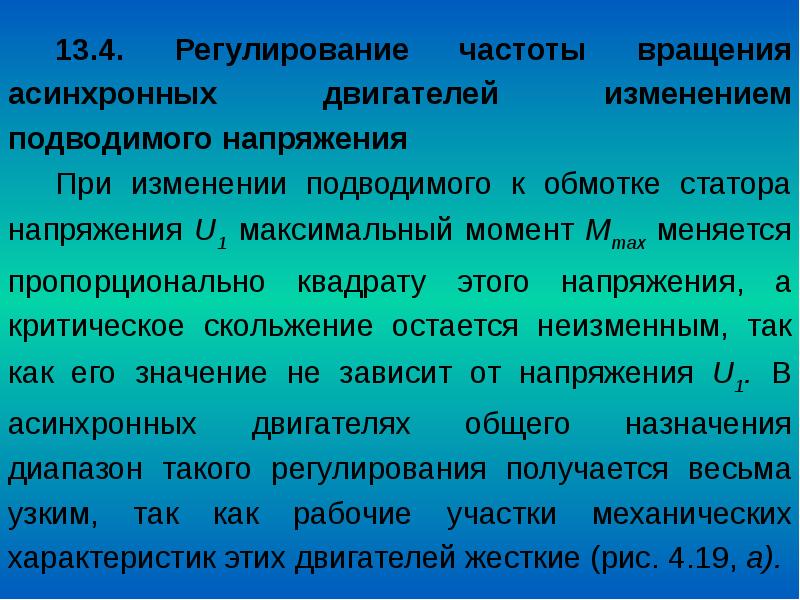 С их помощью пользователи оборудования значительно сокращают затраты на монтаж и создают себе много возможностей для модульного построения своих систем, независимых от электрошкафа. Кроме того, в нашем ассортименте в области преобразовательной техники есть устройства рекуперации энергии в сеть, которые комбинируются с одним или несколькими преобразователями частоты и приводными преобразователями. Также мы предлагаем простые пускатели двигателя для встраивания в
С их помощью пользователи оборудования значительно сокращают затраты на монтаж и создают себе много возможностей для модульного построения своих систем, независимых от электрошкафа. Кроме того, в нашем ассортименте в области преобразовательной техники есть устройства рекуперации энергии в сеть, которые комбинируются с одним или несколькими преобразователями частоты и приводными преобразователями. Также мы предлагаем простые пускатели двигателя для встраивания в
Преобразователи частоты для монтажа в электрошкафу
От простого преобразователя до стандартного или специального преобразователя и далее до модульного сервопреобразователя – мы предлагаем вам широкий ассортимент приводной электроники для централизованного размещения в электрошкафу или распределительном щите:
Преобразователи частоты для настенного монтажа
Еще одна и при этом менее затратная возможность централизованного размещения преобразователей частоты – это настенный монтаж. Он всегда используется в тех случаях, когда приобретать дорогой электрошкаф нерационально. Наши преобразователи частоты, которые подходят для такого способа монтажа, имеют соответствующую степень защиты от IP 54 до IP 66 (для пыльных и влажных условий окружающей среды).
Он всегда используется в тех случаях, когда приобретать дорогой электрошкаф нерационально. Наши преобразователи частоты, которые подходят для такого способа монтажа, имеют соответствующую степень защиты от IP 54 до IP 66 (для пыльных и влажных условий окружающей среды).
Пускатели двигателя для децентрализованного монтажа
Достаточно ли для вашей приводной системы функции именно преобразователя? Или вам нужно простое включение/выключение двигателя или переключение направления вращения двигателя с левого на правое? Подходящие продукты в ассортименте SEW-EURODRIVE найдутся и для этого случая:
Преобразователи частоты для децентрализованного монтажа
Для размещения вашей приводной электроники рядом с двигателем или мотор-редуктором мы предлагаем широкий выбор преобразователей частоты: от простого преобразователя с настройкой темпа для надежного применения в простых системах до стандартного преобразователя с расширенными функциями регулирования и далее до свободно программируемого специального преобразователя для систем сложной архитектуры. А если вам нужно децентрализованным образом реализовать многоосевые перемещения, а также системы с цепочкой рабочих модулей, то лучшим выбором будут многоосевые сервоусилители. Децентрализованные преобразователи в нашем ассортименте:
А если вам нужно децентрализованным образом реализовать многоосевые перемещения, а также системы с цепочкой рабочих модулей, то лучшим выбором будут многоосевые сервоусилители. Децентрализованные преобразователи в нашем ассортименте:
Сравнительный анализ методов оценки скорости вращения ротора асинхронного двигателя по спектру потребляемого тока Текст научной статьи по специальности «Электротехника, электронная техника, информационные технологии»
2. Афоничев, Н. Ю., Определение оптимального маршрута перевозки грузов: Учебное пособие [Текст] / Н. Ю. Афоничев / Омский гос. ун-т путей сообщения. – Омск, 2010. – 74 с.
3. Кульгин, М. Технология корпоративных сетей. Энциклопедия [Текст] / М. Кульгин. -СПб: Питер, 2000. – 704 с.
4. Лукинский, В. С. Модели и методы теории логистики [Текст] / В. С. Лукинский. -СПб: Питер, 2008. – 448 с.
5. Миротин, Л. Б. Транспортная логистика: Учебник для транспортных вузов [Текст] / Л. Б. Миротин. – М.: Экзамен, 2003. – 512 с.
Миротин, Л. Б. Транспортная логистика: Учебник для транспортных вузов [Текст] / Л. Б. Миротин. – М.: Экзамен, 2003. – 512 с.
6. Никифоров, В. С. Мультимодальные перевозки и транспортная логистика: Учебное пособие [Текст] / В. С. Никифоров. – М.: ТрансЛит, 2007. – 272 с.
7. Шахов, В. Г. Определение оптимального маршрута перевозки грузов: [Текст] / В. Г. Шахов, Н. Ю. Афоничев / Омский гос. ун-т путей сообщения. – Омск, 2013.
8. Алгоритм Дейкстры, Флойда, Беллмана – Форда [Электронный ресурс] / Режим доступа: http://www.intuit.ru/studies/courses/12181/1174/lecture/25268?page=3.
9. Алгоритмы Беллмана – Форда, Иена, волновой алгоритм [Электронный ресурс] / Режим доступа: http://algolist.manual.ru/maths/graphs/shortpath/.
References
1. Afonichev N. Iu., Volkova V. K. Determining the optimal route of transportation of goods [Opredelenie optimal’nogo marshruta perevozki gruzov]. Rossiia molodaia: peredovye tekhnologii v promyshlennost’ – Young Russia: advanced technology in the industry, 2015, no. 3. – 5 p.
Afonichev N. Iu., Volkova V. K. Determining the optimal route of transportation of goods [Opredelenie optimal’nogo marshruta perevozki gruzov]. Rossiia molodaia: peredovye tekhnologii v promyshlennost’ – Young Russia: advanced technology in the industry, 2015, no. 3. – 5 p.
2. Afonichev N. Iu. Opredelenie optimal’nogo marshruta perevozki gruzov: Uchebnoe posobie (Determination of the optimal route of transportation of cargo: Textbook). Omsk, 2010, 74 p.
3. Kul’gin M. Tekhnologiia korporativnykh setei. Entsiklopediia (Corporate networks Technology. Encyclopedia). SPb.: Piter, 2000, 704 p.
4. Lukinskii V. S. Modeli i metody teorii logistiki (Models and methods of logistics theory). SPb.: Piter, 2008, 448 p.
5. Mirotin L. B. Transportnaia logistika: Uchebnik dlia transportnykh vuzov (Transport Logistics: Textbook for high schools transport). Moscow: Ekzamen Publ., 2003, 512 p.
Moscow: Ekzamen Publ., 2003, 512 p.
6. Nikiforov V. S. Mul’timodal’nye perevozki i transportnaia logistika: Uchebnoe posobie (Multimodal transportation and transport logistics: Textbook). Moscow: TransLit Publ., 2007, 272 p.
7. Shakhov V. G., Afonichev N. Iu. Opredelenie optimal’nogo marshruta perevozki gruzov: Elektronnoe uchebnoe posobie (Determining the optimal route of transportation of goods: electronic textbooks). Omsk, 2013.
8. Algoritm Deikstry, Floida, Bellmana-Forda [Elektronnyi resurs] / Rezhim dostu-pa: http://www.intuit.ru/studies/courses/12181/1174/lecture/25268?page=3
http://www.intuit.ru/studies/courses/12181/1174/lecture/25268
9. Algoritmy Bellmana-Forda, Iena, volnovoi algoritm [Elektronnyi resurs] / Re-zhim dostupa: http://algolist. manual.ru/maths/graphs/shortpath/
manual.ru/maths/graphs/shortpath/
УДК 621.313
А. В. Скляр, С. Н. Чижма
СРАВНИТЕЛЬНЫЙ АНАЛИЗ МЕТОДОВ ОЦЕНКИ СКОРОСТИ ВРАЩЕНИЯ РОТОРА АСИНХРОННОГО ДВИГАТЕЛЯ ПО СПЕКТРУ ПОТРЕБЛЯЕМОГО ТОКА
В статье приводятся два метода оценки угловой скорости вращения ротора асинхронного двигателя, использующие особые спектральные компоненты, порождаемые конструкцией двигателя. Выполнив поиск этих компонентов, можно оценить скольжение ротора. Целью работы является сравнение представленных мето-
■Е ИЕ ИЗВЕСТИЯ Транссиб а 81
дов при различных нагрузках двигателя и определение наиболее точного метода. Результатом работы является создание алгоритма программного модуля для оценки частоты вращения ротора асинхронного двигателя, который может применяться для различных практических задач, где требуется точное определение угловой скорости вращения, однако или нет доступа к движущимся частям для установки датчика оборотов, или применение датчиков оборотов нежелательно.
В настоящее время приобретает широкое распространение метод электромониторинга, который для определения дефектов двигателя использует спектр тока статора. Данный метод нашел применение в атомной и нефтяной отраслях, однако исследований использования этого метода для нужд железной дороги ранее не проводилось. Тем не менее широкое использование асинхронных двигателей в качестве вспомогательных машин подвижного состава, тяговых асинхронных двигателей и статистика отказов оборудования обусловливают применение электромониторинга и в области железнодорожного транспорта.
Ключевым моментом этого метода является определение частоты вращения ротора, так как от нее зависит расположение всех спектральных компонентов в спектре тока статора. Однако применение датчиков частоты вращения в таких системах диагностики нежелательно, так как это увеличивает стоимость системы и количество соединительных проводов, поэтому предпочтительнее использование бездатчикового метода определения частоты вращения ротора.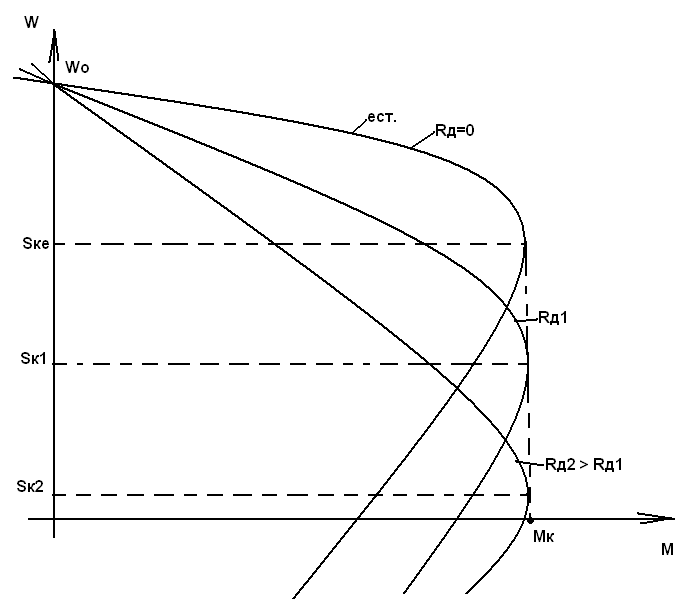
За последнее время были разработаны методы определения частоты вращения асинхронных двигателей по току статора. Их можно разделить на две группы [1]: методы, использующие математическую модель двигателя, и методы, использующие анализ компонентов спектра напряжения или тока двигателя.
Методы, основанные на математической модели, дают преимущества в скорости обработки данных, но требуют большого количества параметров двигателя. Кроме того, необходимо измерение как тока, так и напряжения [2].
Методы, основанные на спектральном анализе, не зависят от электромагнитных параметров двигателя и требуют только измерения тока или напряжения, однако при использовании таких методов необходимо большое количество вычислений. Наиболее распространены методы, использующие 2-преобразование, быстрое преобразование Фурье и его разновидности, преобразование Гильберта. Сравнение этих методов дано в работах [3, 4].
Сравнение этих методов дано в работах [3, 4].
Часто бездатчиковые оценки частоты вращения используются в системах электроприводов [5]. В источнике [6] описывается способ оптимальной оценки частоты вращения ротора, основанный на измерении текущих значений токов и напряжений статора, вычисляется значение реактивной мощности и применяется пропорционально-интегральное преобразование на основе минимизации критерия качества, определяемого по сохраненным ранее двум предыдущим значениям оценки частоты вращения и разности значений прямого и косвенного вычислений реактивной мощности. В некоторых работах для получения значения частоты вращения двигателя используются искусственные нейронные сети [7, 8]. В работе [9] представлены исследование и разработка наблюдателя угловой скорости для асинхронных электродвигателей по схеме ТРН-АД. В патенте [10] предлагается способ оценки частоты вращения погружных насосов с помощью измерения тока одной из фаз: трансформируют трансформатором тока частотную последовательность импульсов фазного тока и синусоидальный ток, потребляемый погружным электродвигателем от трехфазного питающего напряжения; выделяют нужную частотную последовательность импульсов напряжения, которая создается из-за влияния магнитов, расположенных особым образом. 1+—
1+—
V
p
(2)
Формула (2) используется для вычисления динамического эксцентриситета, который всегда присутствует в асинхронном двигателе из-за его конструктивных особенностей. Однако величина эксцентриситета может варьироваться в пределах 10 % от номинального зазора [13], поэтому амплитуда гармоник может существенно отличаться для различных двигателей даже одной марки. Производители обычно стремятся уменьшить величину эксцентриситета двигателя, поэтому предложенный способ может давать неверную интерпретацию, если необходимые спектральные компоненты будут иметь малую амплитуду. Однако проведем исследование этого метода с целью определения его возможностей.
С помощью выражения (2) можно производить оценку частоты вращения ротора, если учитывать тот факт, что скольжение обычно составляет от 0 до 0,08.
Lh = /г R-±1 . (4)
V Р J
Формула (4) используется для расчета пазовых гармоник [7].
Пазовая гармоника вызывается особенностями конструктивного исполнения электрической машины переменного тока, у которой на статоре и на роторе обмотка всегда укладывается в пазах. При вращении ротора в зазоре двигателя возникает периодическое чередование ферромагнитных пазов статора и ротора. Это приводит к модуляции магнитного потока в зазоре частотой, связанной с количеством пазов на роторе и статоре электрической машины [14].
Для оценки скорости с применением пазовых гармоник необходимо знать число пазов ротора, которое можно получить из документации на двигатель либо попытаться определить их по спектру тока, как предложено в работе [11].
Сравним эти два метода на примере оценки частоты вращения ротора асинхронного двигателя, работающего при различных значениях нагрузки на валу.
Для проведения опытов была создана экспериментальная установка. За основу была взята конструкция, описанная в статье [12], однако она претерпела определенные изменения. Установка состоит из асинхронного двигателя M2 АИРМ63В4У3, характеристики которого приведены в таблице 1, и генератора M1 постоянного тока, нагруженного на реостат R. Генератор и двигатель соединены гибкой муфтой. Частота вращения ротора измеряется с помощью датчика Холла. Сигнал тока статора снимается с помощью токовых клещей Fluke i5s,
установленных на одной из фаз АД. Оцифровку преобразованного сигнала тока выполняет система сбора данных фирмы Ь-Сагё ЬТЯ-Еи-2 с модулем АЦП ЬТЯ22. Частота дискретизации во всех опытах составляет 78,125 кГц. Спектр тока получен с помощью программного обеспечения ЬОгарЬ2 фирмы Ь-Сагё.
Таблица 1 – Технические характеристики двигателя АИРМ63В4У3
Параметр Значение
Номинальная мощность АД, кВт 0,37
Синхронная частота вращения, об/мин 1500
Число пар полюсов 2
Количество пазов ротора 30
Схема испытания приведена на рисунке 1.
Рисунок 1 – Схема опыта для оценки частоты вращения двигателя: Я – реостат; ДО – датчик оборотов; ПК – персональный компьютер; АЦП – аналого-цифровой преобразователь
Для примера оценки частоты вращения ротора методом поиска гармоник эксцентриситета рассмотрим спектр тока двигателя АИРМ63В4У3, работающего на холостом ходу.
Частота вращения ротора пг, измеренная датчиком оборотов, составляет 1492,1 об/мин. Используя формулу (2), вычислим частоту гармоник эксцентриситета:
./¿Ж яеИ 501 1
1 – 0,00527
– 25,132 Гц;
.ГиБ,,„ – 50 1 + 1 = 74,868 Гц.
На рисунке 2 приведен участок спектра тока статора в диапазоне расположения частот эксцентриситета. Можно увидеть пики амплитуд около рассчитанных частот. Небольшое несоответствие объясняется нестабильностью частоты питающей сети и, как следствие, вращения ротора, а также погрешностью измерений.
Рисунок 2 – Спектр тока статора при частоте вращения 1492,1 об/мин
84 ИЗВЕСТИЯ Транссиба № 1(25) ОП4 С
Теперь изменим частоту вращения ротора с помощью уменьшения сопротивления реостата генератора. Новая частота вращения составляет 1468,8 об/мин. Соответственно частота гармоник эксцентриситета будет рассчитываться так:
/ьВБ _ яек
УшБ яек
= 50Г _ 1 -0.0208V25>52Гц.
( 1 – 0.0208 1 = 501 1 +-.-1 = 74.48 Гц.
На рисунке 3 приведен спектр тока статора для этого случая. Как мы видим, гармоники, связанные с эксцентриситетом зазора, сместились на 0,388 Гц друг к другу, что соответствует новой частоте вращения двигателя.
1 1 1 1 1 1 1 1 III мм 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 мм III 1 1 1 1 III —мм 1 1 1 1 III III
25.55 Г Ц 7 4.45 Гц 1
11 1 1
1 У, 1 1 1 Л
1 чрт V ш тт
И Г(п 111 1 IV1 I 1 т 1 || Г'[г Iг
-20.0 -40.0 -60.0 -В0.0 -100.0 -120.0 -140.0 -16:.:
ВО
= 7Е
50 43 7Е
5=7Е
33 7Е 100
Рисунок 3 – Спектр тока статора при частоте вращения 1466,6 об/мин
В таблице 2 приведены результаты измерения частоты эксцентриситета для других значений нагрузки испытуемого двигателя.
Таблица 2 – Результаты измерения частот эксцентриситета
Мощность Измеренная Скольжение Нижняя вы- Верхняя Нижняя изме- Верхняя изме-
нагрузки, частота численная вычисленная ренная боковая ренная боковая
Вт вращения, боковая час- боковая час- частота эксцен- частота эксцен-
об/мин тота эксцентриситета, Гц тота эксцентриситета, Гц триситета, Гц триситета, Гц
0 1492,1 0,00527 25,132 74,868 25,17 74,85
21,14 1487,5 0,00833 25,208 74,792 25,22 74,81
42,517 1483,2 0,0112 25,28 74,72 25,25 74,78
63,116 1479,3 0,0138 25,345 74,655 25,31 74,69
87,932 1474,5 0,017 25,425 74,575 25,47 74,61
109,497 1468,8 0,0208 25,52 74,48 25,55 74,45
Теперь проведем оценку частоты вращения ротора методом поиска пазовых гармоник.ИИЗВЕСТИЯ Транссиб а 85
/ж = 501 301 в’0223-1| = 683,275 Гц;
с
/и5В гЬ 50
1 – 0,0223
30
V 2
+1 = 783,275 Гц.
Рисунок 4 – Спектр тока статора при частоте вращения 1492,4 об/мин
На рисунке 5 приведен спектр тока статора для этого случая. Как мы видим, пазовые гармоники сместились на 12,923 Гц влево, что соответствует новой скорости вращения двигателя.
Рисунок 5 – Спектр тока статора при частоте вращения 1466,6 об/мин
В таблице 3 приведены результаты измерения частоты пазовых гармоник для других значений нагрузки испытуемого двигателя.
Таблица 3 – Результаты измерения пазовых гармоник
Мощность Измеренная Скольжение Нижняя вы- Верхняя вы- Нижняя изме- Верхняя изме-
нагрузки, частота численная бо- численная ренная боковая ренная боковая
Вт вращения, ковая частота боковая час- частота пазо- частота пазо-
об/мин пазовой гармо- тота пазовой вой гармоники, вой гармоники,
ники, Гц гармоники, Гц Гц Гц
0 1491,2 0,0059 695,60 795,60 695,52 795,51
21,38 1487,4 0,0084 693,70 793,70 693,74 793,72
43,974 1483,1 0,0113 691,55 791,55 691,54 791,53
63,364 1479,3 0,0138 689,65 789,65 689,62 789,61
88,101 1472,6 0,0183 686,30 786,30 686,33 786,32
109,634 1467,3 0,0218 683,65 783,65 683,72 783,71
Сравним между собой точность приведенных методов. Результаты полученных скоростей движения ротора для обоих методов и погрешность оценки приведены в таблице 4.
Сравнивая оба метода оценки скорости вращения, можно сделать следующие замечания. Гармоники, отвечающие за эксцентриситет ротора, являются низкочастотными, и их не всегда удается четко выделить в спектре тока статора. По сравнению с ними пазовые гармоники являются высокочастотными, и их легко отделить на фоне общего шума. Очевидно, что
86 ИЗВЕСТИЯ Транссиба № 1(25) ОП4 С
■ I = 2иПО
формула (4) будет давать более точные значения скольжения, чем (2), в Я раз, особенно при нестабильной частоте вращения ротора. При использовании метода оценки, основанного на влиянии эксцентриситета на ток статора, изменение частот гармоник при изменении частоты вращения данного двигателя на 1 об/мин составляет 0,0167 Гц. Это является причиной получения спектров с более высоким разрешением, что увеличивает время съема данных. В свою очередь при оценке методом, основанным на появлении пазовых гармоник в спектре тока статора, изменение частоты этих гармоник при изменении частоты вращения двигателя на 1 об/мин составляет 0,5 Гц. Иначе говоря, этот метод более чувствителен к изменению угловой скорости.
Таблица 4 – Сравнение результатов опытов
Способ оценки скорости Измеренная датчиком оборотов частота вращения, об/мин Оценка частоты вращения, об/мин Относительная погрешность, %
Поиск частотных ком- 1492,1 1490,4 0,00114
понентов динамического 1487,5 1487,7 0,000135
эксцентриситета 1483,2 1485,9 0,00182
1479,3 1481,4 0,00142
1474,5 1474,2 0,000204
1468,8 1467 0,00123
Поиск частотных ком- 1491,2 1491,03 0,000114
понентов зубцовопазо- 1487,4 1487,46 0,0000403
вых гармоник 1483,1 1483,07 0,0000202
1479,3 1479,23 0,0000473
1472,6 1472,65 0,000034
1467,3 1467,43 0,0000886
На основании описанных выше экспериментов можно разработать алгоритм для оценки скорости вращения ротора асинхронного двигателя по спектру тока его статора методом поиска пазовых гармоник.
Л тах – 1
/1
Л
Р
1 –
— /ЬЗБ „к < /
(
У
Л
1
Л
Л–1
V Р У
тах |
Р У
(
— /иЗБ тик < /
ЛI +1 Р
Л
(5)
(6)
Допустим, нам известно, что при максимальной нагрузке скольжение 5тах составляет
0,08. Вычислим возможный диапазон изменения пазовых гармоник для двигателя АИРМ63В4У3, используя формулы (6) и (7):
с
50
1 – 0,08
с
30
V 2
г–1| — /
ЬЗБ гк
< 50
1
30—1
V 2 у
640 — /Ь5Б гк < 700;
/
50
ЬЗБ _гк 1 – 0,08
с
30
V 2
+ 1| — /и
иЗБ гк
< 50
1
30- +1
V 2 у
740 — /иШ „к < 800.
После вычисления диапазона возможных частот пазовых гармоник перейдем к съему спектра и выделению диапазона поиска. Спектр тока статора с диапазонами поиска показан на рисунке 6.
При анализе спектра нужно учитывать наличие гармоник основной частоты. Тогда в диапазоне поиска однозначно видно присутствие двух частотных компонентов – 697,55 и
797,43 Гц, что соответствует значениям частоты пазовых гармоник (после измерения угловой скорости датчиком скорости измеренные и вычисленные частоты совпали в пределе погрешности).
-16.»-
-«.ю-
«.0071100- —н 13-я гармоника основной частоты 15-я гармоника остовиом частоты
Ю.1Ю~ 697.55 Гц ! 1 ; А 11
ЧВ.Ю-»ГО.Ю- МП ЖШ ийМ’1′
тоо-»».00- РРТ 1 у РЛ11
маоо-‘ЕВ.Ю-
ЧЯЮ- гйЫЮ-
т.да- бьь.ю ш.ио ??оос бвасю еэдад поло 71( о» т»’а> тззоо ‘«во ‘ьо’ю ‘1а>1й тл’аз тмпо 79000 аеооо
Рисунок 6 – Спектр тока в диапазоне поиска
Рисунок 7 – Блок-схема алгоритма оценки частоты вращения ротора асинхронного двигателя
№ 1(25) 2016
После вычисления частоты компонентов пазовых гармоник можно «захватить» эти час -тоты и отслеживать их, если принять тот факт, что нагрузка не может измениться мгновенно. Тогда не требуется искать гармоники во всем диапазоне частот. Новый диапазон на каждое измерение можно вычислить так:
–
Afrsh = 2f – As, (7)
Р
где As – диапазон изменения скольжения, который зависит от предполагаемой скорости изменения нагрузки за время между съемами сигнала.
Например, для двигателя АИРМ63В4У3, если скорость не может измениться более чем на 10 об/мин между двумя измерениями, то сдвиг пазовых частот следует искать в диапазоне
30
2 • 50-о 0,0066667 = 10 Гц.
2
Новый диапазон поиска составляет всего 10 Гц (5 Гц влево и 5 Гц вправо от старого значения частоты гармоники). Как видно, границы поиска теперь сузились в шесть раз.
На основании приведенных приемов можно составить алгоритм оценки частоты вращения ротора асинхронных двигателей методом поиска пазовых гармоник. Блок-схема этого алгоритма приведена на рисунке 7.
Приведенный алгоритм может использоваться для создания программного модуля наблюдения за скоростью вращения асинхронного двигателя (АД), который подходит для применения в различных практических задачах, например, в составе автоматизированной системы диагностики по спектру тока статора асинхронных вспомогательных и тяговых двигателей подвижного состава. Этот метод может быть полезным и в других областях промышленности, если нет прямого доступа к движущимся частям механизмов и, следовательно, нет возможности закрепить датчик оборотов либо поставить метку. В свою очередь спектр тока легко снять, так как питающие кабели всегда доступны для подключения. Кроме того, токовые трансформаторы часто уже установлены во многих системах управления, что позволяет использовать их для определения скорости вращения нагруженных механизмов.
Список литературы
1. Aiello, M., An induction motor speed measurement method based on current harmonic analysis with the chirp-Z transform / M. Aiello, A. Cataliotti // IEEE Transactions on Instrumentation and Measurement. – 2005. – Vol. 54. – pp. 1811 – 1819.
2. Rajashekara, K. Sensorless Control of AC Motor Drives / K. Rajashekara, A.Kamamura, K. Matsure // IEEE Press. – New Jersey, 1996.
3. Aiello, M. A comparison of spectrum estimation techniques for periodic and nonstationary signals / M. Aiello, A. Cataliotti, S. Nuccio // IEEE Instrumentation and Measurement Technology Conference, 2001. – pp. 1130 – 1134.
4. Hurst, K. D. A comparison of spectrum estimation techniques for sensorless speed detection in induction machines / K. D. Hurst, T. G. Habetler // IEEE Transactions on Industrial Applications, 1997. – Vol. 33. – pp. 898 – 905.
5. Соколовский, Г. Г. Электроприводы переменного тока с частотным регулированием [Текст] / Г. Г. Соколовский. – М.: Академия, 2006. – 265 с.
6. Пат. 2385529 Российская Федерация, МПК H 02 P 21/14. Способ оптимальной оценки частоты вращения асинхронного двигателя и система для его реализации [Текст] / Букре-ев В. Г., Лаходынов В. С., Аксенов Д. С.; заявитель и патентообладатель ЗАО «ЭлеСи». -2008136335/09; заявл. 09.09.2008; опубл. 27.03.2010.
7. Arabaci, H. An articial neural network approach for sensorless speed estimation via rotor slot harmonics / H. Arabaci // Turkish Journal of Electrical Engineering & Computer Sciences, 2014. – pp. 1076 – 1084.
8. Пат. 2476983 Российская Федерация, МПК H 02 P 23/14, H 02 P 27/04. Способ определения оценки частоты вращения асинхронного двигателя [Текст] / Глазырин А. С.,
№ 1(25) ЛЛ Л I11Г1 Г( Till Транссиба 89
=2016 ■
Ткачук Р.Ю. и др.; заявитель и патентообладатель Национальный исследовательский Томский политехн. ун-т. – 2011135823/07; заявл. 26.08.2011; опубл. 27.02.2013, Бюл. № 6.
9. Тимошкин, В. В. Разработка и исследование наблюдателя угловой скорости для асинхронных электроприводов по схеме ТРН-АД [Текст] / В. В. Тимошкин: дис… докт. техн. наук. – Томск, 2014. – 153 с.
10. Пат. 2463612 Российская Федерация, МПК G 01 P 3/48. Способ определения скорости вращения погружных асинхронных электродвигателей [Текст] / Ковалев А. Ю., Ковалева Н. А., Кузнецов Е. М.; заявитель и патентообладатель Академический институт прикладной энергетики. – 2011104945/28; заявл. 10.02.2011; опубл. 10.10.2012.
11. Wei Zhou Incipient bearing fault detection for electric machines using stator current noise cancellation / Zhou Wei // A Dissertation Presented to The Academic Faculty, Georgia Institute of Technology, 2007.
12. Чегодаев, Ф. В. Моделирование асинхронного частотного привода с помощью метода взаимной нагрузки [Текст] / Ф. В. Чегодаев, С. Н. Чижма, А. В. Спиридонов // Известия Транссиба / Омский гос. ун-т путей сообщения. – Омск, 2013. – № 2 (14). – С. 31 – 37.
13. Thomson, W. T. Motor current signature analysis to detect faults in induction motor drives – fundamentals, data interpretation, and industrial case histories / W. T. Thomson, R. J. Gil-more // Proceedings of the thirty-second turbomachinery symposium. – Texas, 2003. – pp. 145 – 156.
14. Русов, В. А. Диагностика дефектов вращающегося оборудования по вибрационным сигналам [Текст] / В. А. Русов. – Пермь, 2012. – 252 с.
References
1. Aiello M., Cataliotti A. An induction motor speed measurement method based on current harmonic analysis with the chirp-Z transform / IEEE Transactions on Instrumentation and Measurement, 2005. – Vol. 54. – pp. 1811 – 1819.
2. Rajashekara K., Kamamura A., Matsure K. Sensorless Control of AC Motor Drives / IEEE Press. – New Jersey, 1996.
3. Aiello M., Cataliotti A., Nuccio S. A comparison of spectrum estimation techniques for periodic and nonstationary signals / IEEE Instrumentation and Measurement Technology Conference, 2001. – pp. 1130 – 1134.
4. Hurst K. D., Habetler T. G. A comparison of spectrum estimation techniques for sensorless speed detection in induction machines / IEEE Transactions on Industrial Applications, 1997. – Vol. 33. – pp. 898 – 905.
5. Sokolovsky G. G. Elektroprivody peremennogo toka s chastotnym regulirovaniyem [AC drives with frequency regu-lation], Moscow: Academy Publ., 2006, 265 p.
6. Bukreyev V. G., Lakhodynov V. S., Aksenov D. S. Patent RU2385529, 2010.
7. Arabaci H. An articial neural network approach for sensorless speed estimation via rotor slot harmonics / Turkish Journal of Electrical Engineering & Computer Sciences, 2014. – pp. 1076 -1084.
8. Glazyrin A. S., Tkachuk R. Yu., Glazyrina T. A. Timoshkin V. V. Patent RU 2476983, 2013.
9. Timoshkin V. V. Razrabotka i issledovanie nabludatelya yglovoi skorosti dlya asinchronnuh electroprivodovpo sheme TRN-AD [Development and research of the observer of the angular velocity for asynchronous electric scheme TRN -AD]. Doctor’s thesis, Tomsk, 2014, 153 p.
10. Kovalev A. U., Kovaleva N. A., Kuznicov E. M. Patent RU 2463612, 2012.
11. Wei Zhou Incipient bearing fault detection for electric machines using stator current noise cancellation / A Dissertation Presented to The Academic Faculty, Georgia Institute of Technology, 2007.
12. Chegodaev, F. V., Chizhma S. N., Spiridonov V. A. Modeling asynchronous frequency drive through mutual load method [Modelirovanie asinchronnogo chastotnogo privoda s pomoshu metoda szaimnoy nagryzki]. Izvestiia Transsiba – The journal of Transsib Railway Studies, 2013, no. 2 (14), pp. 31 – 37.
90 ИЗВЕСТИЯ Транссиба № 1(25) ОП4 с
■ i = 2U1o
13. Thomson W. T., Gilmore R. J. Motor current signature analysis to detect faults in induction motor drives – fundamentals, data interpretation, and industrial case histories / Proceedings of the thirty-second turbomachinery symposium. – Texas, 2003. – pp. 145 – 156.
14. Rusov V. A. Diagnostica defectov vrashaushegosya oborudovaniya po vibracionnym signalam (Diagnosis defects using rotating machinery vibration signals). Perm, 2012, 252 p.
УДК 656.212.2.073.22
Е. Д. Псеровская, И. Н. Кагадий
МОДЕЛИРОВАНИЕ ГРУЗОВОЙ РАБОТЫ СТАНЦИИ ВО ВЗАИМОДЕЙСТВИИ С ПУТЯМИ НЕОБЩЕГО ПОЛЬЗОВАНИЯ
В статье приведен анализ функционирования сложных транспортных систем, охарактеризованы основные принципы использования имитационного моделирования в организации перевозочного процесса на железнодорожном транспорте. Рассмотрен метод создания объектно-ориентированной модели для описания динамики взаимодействия грузовой станции и пути необщего пользования.
Современные станции и транспортные узлы являются сложными системами, которые нельзя рассчитывать по частям, так как слишком сильно их взаимное нелинейное влияние. Утвержденная для ОАО «РЖД» «Инструкция по расчету наличной пропускной способности железных дорог/МПС СССР; утв. 24.04.89.» [1] использует аналитический детерминированный подход и, следовательно, сохраняет все погрешности метода. Так, например, загруженность станции рассчитывается отдельно по паркам, горловинам, сортировочным и грузовым устройствам. Поскольку взаимодействие технологических линий друг на друга достаточно сильное, то такой способ не всегда дает объективные значения исследуемых параметров станции.
В имитационном моделировании структура модели отражает структуру реального объекта моделирования на некотором уровне абстракции, а связи между компонентами модели являются отражением реальных связей. В работах [2, 3] приводится описание системного взаимодействия грузовой станции и пути необщего пользования и функционирования двух представленных объектов как системы массового обслуживания. Для оптимизации местной грузовой работы на станциях и промышленных транспортных предприятиях актуально анализировать данные экспериментов и получать на их основе функциональные характеристики управляемой моделируемой системы.
Исследуемая система представлена в виде системы массового обслуживания (СМО): многофазной многоканальной СМО сложной структуры с различными видами заявок. Модель, исходя из такой структуры, состоит из имитации функционирования грузовой станции и грузового пункта [3]. Сетевой график работы грузовой станции и пути необщего пользования приведен на рисунке 1.
Таким образом, цикл обслуживания любой заявки структурно включает в себя несколько фаз обслуживания, которые в свою очередь состоят из элементов, на которых выполняются в определенной последовательности и с известной затратой времени простейшие операции. Начальные базисные элементы отмечены а;, а конечные – уь Все остальные фазы в; являются промежуточными [4]. К базисным относится занятость технологических линий станции для подачи на грузовой пункт (приемоотправочный парк, система расформирования, сортировочный парк, горловины станции; операции 1 – 7 на рисунке 1), к конечным – элементы станции для отправления составов на сеть дорог (грузовые устройства пунктов погрузки-выгрузки, система формирования, сортировочный парк, приемоотправочный парк; операции 8 – 32 на рисунке 1), а промежуточные – элементы простоев и ожидания выполнения операций на базисных и конечных элементах.
Асинхронный двигатель– обзор
Частотно-регулируемые приводы
Асинхронные и синхронные двигатели рассчитаны на определенное соотношение напряжения к частоте ( В, / Гц). Напряжение – это напряжение питания двигателя, а частота – это частота питания. Отношение В, / Гц прямо пропорционально величине магнитного потока в магнитном материале двигателя (пластинах сердечника статора и ротора). Крутящий момент, развиваемый на валу двигателя, пропорционален силе вращающегося потока.Тип и количество магнитного материала, используемого в конструкции двигателя, являются факторами, определяющими номинальную мощность двигателя.
При постоянной частоте питающей сети более высокое напряжение вызывает более высокое отношение В, / Гц и более высокий магнитный поток. При постоянном напряжении питания более низкая частота питания приведет к более высокому соотношению В, / Гц и более высокому потоку. Более высокий магнитный поток увеличивает крутящий момент двигателя. Когда двигатель работает при более высоком напряжении В, / Гц, чем номинальное, возникает перенапряжение, которое может вызвать насыщение статора и магнитного сердечника ротора.Насыщение вызывает перегрев и может привести к отказу мотора. Когда двигатель работает при напряжении В и / Гц ниже номинального, магнитный поток уменьшается. Уменьшение магнитного потока снижает крутящий момент и влияет на способность двигателя выдерживать нагрузку.
Когда двигатели питаются напрямую от электросети, частота питающей сети постоянна, а напряжение и ток изменяются во время запуска двигателя. Во время разгона двигателя до синхронной скорости (синхронные двигатели) или скорости, близкой к синхронной (асинхронные двигатели), ток сначала возрастет в несколько раз по сравнению с номинальным током и вызовет падение напряжения.Более низкое напряжение при постоянной частоте питания означает более низкое соотношение В и / Гц и меньший магнитный поток, который влияет на крутящий момент. Как только двигатель разгоняется, напряжение восстанавливается до значения, близкого к номинальному, а крутящий момент на валу двигателя достигает номинального значения. В этом случае скорость двигателя будет постоянной и синхронной (синхронные двигатели) или близкой к синхронной (асинхронные двигатели). Если двигатели подключены напрямую к электросети, скорость определяется фиксированной частотой сети и не может контролироваться.Для управления скоростью при необходимости используются дополнительные механические системы: демпферы, клапаны, коробки передач, тормоза и т. Д. Механические системы снижают общую эффективность системы. Кроме того, как объяснялось ранее, асинхронные двигатели потребляют реактивную мощность, поэтому поддержание коэффициента мощности может быть проблемой для асинхронных двигателей. Синхронные двигатели не вызывают проблем с коэффициентом мощности, они действительно могут помочь.
Существует четыре категории проблем с двигателями, подключенными непосредственно к сети электропитания: высокий пусковой ток, контроль крутящего момента, контроль скорости и коэффициент мощности (только для асинхронных двигателей).Одним из эффективных способов решения проблем является использование частотно-регулируемых приводов. При использовании частотно-регулируемых приводов питание привода осуществляется от сети, а питание двигателя – от привода.
ЧРПуправляют скоростью и крутящим моментом двигателя, регулируя частоту и величину напряжений и токов, подаваемых на двигатель. Каждый частотно-регулируемый привод имеет три секции: выпрямитель, фильтр с накопителем энергии и инвертор. Типичная концептуальная конфигурация показана на рис. 7.22.
Рис. 7.22. Типичная конфигурация ЧРП.
Выпрямитель берет синусоиду фиксированной частоты и величины напряжения из сети и выпрямляет ее в форму сигнала постоянного тока.
Фильтр принимает форму сигнала постоянного тока от выпрямителя и обеспечивает почти чистый линейный постоянный ток. Накопитель энергии используется для поддержания мгновенного энергетического баланса. Если при сбалансированной трехфазной нагрузке общая мощность остается постоянной от момента к моменту, а с идеальным преобразователем, накопление энергии не потребуется. На практике преобразователям требуется накопитель энергии для хранения энергии, достаточной для питания двигателя в течение коротких интервалов, когда мощность нагрузки превышает входную мощность.Конденсаторы и индукторы используются для хранения энергии.
Инвертор преобразует мощность постоянного тока обратно в переменный ток через набор электронных переключателей (MOSFET (металлооксидный полупроводниковый полевой транзистор), IGBT (биполярный транзистор с изолированным затвором), IGCT (встроенный тиристор с коммутацией затвора), GTO (затвор) отключающий тиристор) и др.). Эти переключатели, открывая и закрываясь с определенной скоростью и продолжительностью, могут инвертировать постоянный ток и воссоздавать выходные токи и формы сигналов напряжения, которые имитируют синусоидальные формы сигналов переменного тока.Затем двигатель получает питание от выхода инвертора.
Формы выходных сигналов представляют собой сигналы с широтно-импульсной модуляцией (ШИМ). Они называются сигналами ШИМ, потому что они создаются несколькими импульсами переключателей с короткими интервалами. Величину и частоту сигналов напряжения ШИМ можно регулировать. Изменяя время, импульсы и какие переключатели срабатывают, частота может быть увеличена или уменьшена. Изменяя ширину и длительность импульсов, можно увеличивать и уменьшать среднее напряжение на двигателе.Типичная форма сигнала ШИМ с аппроксимируемой синусоидой показана на рис. 7.23.
Рис. 7.23. Типичная форма сигнала ШИМ с приближенной синусоидой.
При использовании в качестве примера асинхронного двигателя асинхронный двигатель может эффективно работать только при скорости, близкой к синхронной скорости вращающегося поля. Управление скоростью требует непрерывного изменения скорости вращающегося поля, что требует изменения частоты.
Когда выходное напряжение инвертора на каждой выходной частоте инвертора регулируется таким образом, чтобы соотношение В, / Гц поддерживалось постоянным до номинальной скорости, можно получить семейство кривых крутящего момента-скорости, аналогичных рис.7.24.
Рис. 7.24. ЧРП Поставляемый асинхронный двигатель с кривой крутящего момента-скорости с изменением напряжения и частоты и постоянным соотношением В, / Гц.
Точка «а» на рис. 7.24 соответствует крутящему моменту без нагрузки и скорости без нагрузки при частоте питания инвертора 25 Гц. От без нагрузки в точке «a» до полной нагрузки в точке «b» скорость немного снизится. Если требуется поддерживать постоянную скорость из точки «а», регулятор частотно-регулируемого привода повысит частоту, так что рабочая точка при полной нагрузке переместится в точку «с».”Управление частотно-регулируемым приводом также будет повышать напряжение пропорционально увеличению частоты, чтобы поддерживать постоянное соотношение В, / Гц при полной нагрузке и, таким образом, поддерживать крутящий момент при полной нагрузке.
Из рис. 7.24 видно, что момент отрыва постоянен во всех точках ниже номинальной скорости, за исключением низких частот. На низких частотах тяговый момент снижается из-за сопротивления статора. Когда частота приближается к нулю, падение напряжения из-за сопротивления статора становится важным, и уменьшение магнитного потока, вызывающее уменьшение крутящего момента, становится заметным.Этот эффект известен и легко смягчается с помощью низкоскоростного повышения напряжения: увеличения отношения В, / f на низких частотах для восстановления магнитного потока. На рис. 7.25 показан типичный набор кривых крутящий момент-скорость для привода с повышением напряжения на низкой скорости.
Рис. 7.25. График зависимости крутящего момента от частоты вращения асинхронного двигателя с частотно-регулируемым приводом с изменением напряжения и частоты, постоянным соотношением В, / Гц до номинальной скорости и повышением напряжения на низкой скорости.
При превышении номинальной скорости соотношение В, / Гц больше не может поддерживаться постоянным, поскольку напряжение не может превышать номинальное напряжение двигателя во избежание пробоя изоляции двигателя.Повышение частоты сверх номинальной частоты возможно и приведет к более высокой скорости, но при сохранении напряжения на уровне номинального напряжения и, следовательно, при уменьшении соотношения В и / Гц плотность магнитного потока и крутящий момент уменьшатся.
Преимущество двигателей, поставляемых с ЧРП, заключается в том, что двигатель может обеспечивать одинаковый максимальный крутящий момент от нулевой до номинальной скорости. Эта область характеристики крутящий момент-скорость двигателя называется областью «постоянного крутящего момента». Непрерывная работа с максимальным крутящим моментом на практике не выполняется из-за тепловых ограничений.Верхний предел крутящего момента, равный номинальному крутящему моменту двигателя, обычно устанавливается в контроллере.
С двигателями, поставляемыми с частотно-регулируемым приводом, и их наличием высокого крутящего момента на низких скоростях можно избежать проблем пуска, общих для операций с фиксированной частотой (начальное высокое скольжение, высокий пусковой ток, падение напряжения и уменьшение крутящего момента). Двигатель с частотно-регулируемым приводом запускается с низкой частоты, которая постепенно увеличивается. Скорость скольжения ротора всегда мала, и ротор непрерывно работает с оптимальным крутящим моментом.Номинальный крутящий момент доступен на низких скоростях, а пусковой ток не превышает номинального тока полной нагрузки. Двигатель может запускаться от недельной сети электроснабжения, не вызывая нарушений напряжения в питающей сети.
Как упоминалось ранее, двигатель с частотно-регулируемым приводом может развивать любой крутящий момент до номинального крутящего момента на любой скорости вплоть до номинальной. Эта область называется областью «постоянного крутящего момента». При превышении номинальной скорости В, / Гц будет снижаться, потому что напряжение остается постоянным при номинальном напряжении двигателя, ток статора и ротора также остаются постоянными, а скорость и частота увеличиваются, поэтому плотность потока будет уменьшаться, а крутящий момент будет уменьшаться обратно пропорционально Частота.Эта область характеристики крутящий момент-скорость двигателя называется областью «постоянной мощности». Область постоянной мощности примерно в два раза превышает номинальную скорость. За пределами области постоянной мощности находится область высоких скоростей, где предел тока совпадает с пределом крутящего момента отрыва, который уменьшается обратно пропорционально квадрату частоты, поэтому постоянная мощность не может поддерживаться дальше. Области постоянного крутящего момента, постоянной мощности и высокой скорости показаны на рис. 7.26.
Рис. 7.26. ЧРП предоставил кривую крутящего момента-скорости асинхронного двигателя в области постоянного крутящего момента, постоянной мощности и высокой скорости.
В двигателях с ЧРП важно отметить, что кривые крутящий момент-скорость показывают крутящий момент, который двигатель может создать для каждой частоты, но не то, как долго и может ли двигатель работать в каждом состоянии непрерывно. Если в приложении с двигателем, поставляемым с частотно-регулируемым приводом, используется стандартный асинхронный двигатель, необходимо учитывать ограничения по нагреву. Стандартный промышленный двигатель обычно заключен в корпус с вентилятором, установленным на внешнем валу, который обдувает воздухом внешний корпус с оребрением. Стандартная конструкция и охлаждение двигателя предназначены для непрерывной работы при фиксированной частоте и номинальной скорости, подаваемой в сеть.Когда стандартный промышленный двигатель работает, подключенный к ЧРП, который производит низкую частоту и запускает двигатель на низкой скорости, охлаждение двигателя становится проблемой. Двигатель будет способен создавать номинальный крутящий момент на низкой скорости, но в этих условиях он будет работать при более высоких температурах, что может существенно повлиять на срок службы двигателя или вызвать перегрев и отказ двигателя.
Когда двигатель используется в приложениях с частотно-регулируемым приводом, важно указать сценарии работы, соответствующим образом спроектировать охлаждение и использовать двигатели, подходящие для работы с инвертором.
Помимо охлаждения, при использовании двигателей с частотно-регулируемым приводом при проектировании необходимо учитывать и другие факторы, такие как влияние гармоник от частотно-регулируемого привода на сеть, конфигурация кабеля и размер кабеля от частотно-регулируемого привода к двигателю и т. Д.
2-3-3. Характеристики асинхронных двигателей
Как описано в главе 1, синхронная скорость вращения двигателя с магнитным полем определяется по следующей формуле:
N S : Синхронная скорость вращения (оборотов в минуту) [об / мин] N 0 : Синхронная скорость вращения (оборотов в секунду) [об / сек]
f: Частота источника питания [Гц] p: Число полюсов двигателя
Наклейка
Когда мы думаем об асинхронных двигателях, это важный момент.То есть катушка должна пересекать магнитное поле, чтобы через катушку протекал ток.
Для этого должна быть относительная разница скоростей между магнитным полем и катушкой.
Из-за этой разницы скоростей двигатель вращается со скоростью, немного меньшей, чем синхронная скорость.
Это отличие скорости от синхронной скорости называется скольжением и обозначается символом s. Скольжение s выражается следующей формулой:
N: Скорость вращения ротора [об / мин] N S : Синхронная скорость вращения [об / мин]
Скольжение обычно выражается в процентах.Скольжение силового асинхронного двигателя составляет от 2 до 3%, когда двигатель работает при номинальной нагрузке. Вышеуказанное значение становится несколько больше для небольших однофазных двигателей.
Скорость вращения и крутящий момент
На рис. 2.40 показаны характеристики асинхронных двигателей. Когда двигатель сконструирован таким образом, что сопротивление алюминиевого проводника ротора уменьшается, его эффективность увеличивается в диапазоне высоких скоростей. И с другой стороны, когда двигатель спроектирован так, чтобы иметь высокое сопротивление, он имеет повышенный крутящий момент в диапазоне низких скоростей.
В области справа от максимального крутящего момента на характеристической кривой увеличение нагрузки не так сильно снижает скорость двигателей с низким сопротивлением. Крутящий момент увеличивается и становится стабильным.
А именно, скорость этих двигателей остается практически неизменной, несмотря на изменения нагрузки.
На рис. 2.41 показаны характеристики этих двигателей с учетом крутящего момента по горизонтальной оси и скорости вращения по вертикальной оси с добавлением тока и эффективности.
Сравнивая этот график с приведенными выше характеристиками двигателей постоянного тока, вы обнаружите следующие характеристики асинхронных двигателей.
- ● Изменения нагрузки не сильно влияют на их скорость, хотя их крутящий момент изменяется.
- ● Связь между крутящим моментом и током не является линейной.
Что такое «скольжение» в асинхронном двигателе переменного тока?
AutoQuiz редактирует Джоэл Дон, менеджер сообщества ISA по социальным сетям.
Этот вопрос викторины по автоматизации исходит из программы сертификации ISA Certified Automation Professional (CAP). Сертификация ISA CAP обеспечивает непредвзятую, стороннюю, объективную оценку и подтверждение навыков профессионала в области автоматизации. Экзамен CAP ориентирован на направление, определение, проектирование, разработку / применение, развертывание, документацию и поддержку систем, программного обеспечения и оборудования, используемых в системах управления, производственных информационных системах, системной интеграции и операционном консалтинге.Щелкните эту ссылку для получения дополнительной информации о программе CAP.
«Скольжение» в асинхронном двигателе переменного тока определяется как:
a) синхронная скорость минус скорость холостого хода
b) разница между скоростью поля статора и скоростью ротора
c) номинальная скорость плюс синхронная скорость
d) скорость, при которой двигатель развивает крутящий момент
e) ничего из вышеперечисленного
Скольжение обычно выражается в процентах и варьируется в зависимости от двигателя от номинальных 0,5 процента для очень больших двигателей до примерно 5 процентов для небольших специализированных двигателей.Если n s – электрическая скорость статора, а n r – механическая скорость ротора, скольжение S определяется следующим образом:
S = (n s – n r ) / n s
Вращение двигателя в асинхронном двигателе переменного тока развивается под действием движущегося магнитного поля. Когда скорость ротора падает ниже скорости статора или синхронной скорости, скорость вращения магнитного поля в роторе увеличивается, вызывая больший ток в обмотках ротора и создавая больший крутящий момент.
Для создания крутящего момента требуется скольжение. Под нагрузкой скорость ротора падает, а скольжение увеличивается настолько, чтобы создать достаточный дополнительный крутящий момент для поворота нагрузки. Очень эффективный способ контролировать скольжение – использовать частотно-регулируемый привод
.Правильный ответ – B , «разница между скоростью поля статора и скоростью ротора».
Ссылка : Николас Сэндс, П.Е., Кэп и Ян Верхаппен, П.Энг., КАП. , Справочник по автоматизации.Чтобы прочитать краткие вопросы и ответы с авторами, а также бесплатно загрузить 116-страничный отрывок из книги, щелкните по этой ссылке.
О редакторе
Джоэл Дон – менеджер сообщества ISA и независимый консультант по контент-маркетингу, социальным сетям и связям с общественностью. До своей работы в области маркетинга и PR Джоэл работал редактором региональных газет и национальных журналов по всей территории США. Он получил степень магистра в школе Медилл Северо-Западного университета со специализацией в области науки, техники и биомедицинских маркетинговых коммуникаций, а также степень бакалавра. ученой степени Калифорнийского университета в Сан-Диего.
Связаться с Джоэлем
Основное различие между синхронным и асинхронным двигателем
В чем разница между синхронным и асинхронным двигателем (асинхронным двигателем)Электродвигатели – это машины, которые преобразуют электрическую энергию в механическую для выполнения механических операций. Эти двигатели могут быть предназначены для работы на переменном (AC) или постоянном (DC) токе.Двигатели переменного тока подразделяются на два типа; Синхронные двигатели и асинхронные двигатели. Оба они имеют некоторые общие черты, например, в конструкции, но совершенно разные по принципу действия и производительности.
Прежде чем перейти к списку различий между синхронным двигателем и асинхронным двигателем, мы собираемся обсудить их основы и то, как они работают. Для ясного объяснения вы можете знать разницу между однофазным и трехфазным источником питания, относящуюся к работе однофазных и трехфазных двигателей переменного тока.
Как работает двигатель переменного тока?Как мы знаем из нашей предыдущей статьи «Различия между двигателями переменного и постоянного тока», двигатели постоянного тока работают по принципу магнитного поля, действующего на проводник с током, который испытывает механическую силу. Где статор генерирует статическое магнитное поле, а ротор, состоящий из нескольких обмоток, несет входной постоянный ток.
В двигателях переменного тока используется идея вращательного магнитного поля RMF. Статор состоит из нескольких обмоток, которые создают переменное магнитное поле при подаче входного переменного тока.Это магнитное поле вращается вокруг ротора.
Ротор, состоящий из обмоток или проводников с замкнутым контуром, пропускает ток либо посредством индукции, либо через внешний источник тока, создающий собственное магнитное поле. Магнитное поле, создаваемое ротором, взаимодействует с вращающимся магнитным полем и начинает вращаться в его направлении.
Относительная разница между полем вращения статора и скоростью ротора называется скольжением. если скольжение двигателя равно нулю или ротор имеет ту же скорость вращения, что и поле вращения статора, двигатель называется синхронным двигателем переменного тока.если двигатель переменного тока имеет скольжение или существует разница между скоростью возбуждения статора и ротором, двигатель называется асинхронным двигателем. Чтобы узнать больше о различных типах двигателей, обратитесь к предыдущим сообщениям о двигателях BLDC (бесщеточный постоянного тока), шаговых двигателях и серводвигателях.
Связанные сообщения:
Синхронный двигательКак следует из названия, синхронный двигатель имеет ротор, который предназначен для вращения с той же скоростью, что и его вращающееся магнитное поле статора, называемое синхронной скоростью .
Статор создает вращающееся магнитное поле при подаче переменного тока. Ротор может быть спроектирован так, чтобы генерировать собственное магнитное поле с использованием внешнего источника постоянного тока через контактные кольца или с использованием постоянного магнита .
Ротор предназначен для создания магнитных полюсов, равных полюсам статора или целых кратных полюсов. Когда статор и ротор находятся под напряжением, магнитное поле ротора блокируется с вращающимся магнитным полем статора, и он вращается с точной скоростью поля статора.
Из-за инерции синхронный двигатель не запускается сразу с синхронной скоростью (вращательное магнитное поле). Поэтому для обеспечения пускового момента используется дополнительная обмотка под названием « демпферная обмотка ». Во время запуска он действует как асинхронный двигатель. Таким образом, предполагается, что синхронные двигатели – это не самозапускающиеся двигатели , им нужен дополнительный пусковой механизм.
Это может быть двигатель с отдельным возбуждением или без возбуждения, т.е. первый требует отдельного источника постоянного тока, возбуждает обмотки ротора и генерирует магнитное поле, а второй описывает синхронный двигатель, ротор которого предназначен для намагничивания вращающимся магнитным полем статора. и вращается вместе с ним.
Ротор синхронного двигателя вращается с синхронной скоростью, которая зависит от частоты питания и полюсов обмоток статора. Следовательно, скорость двигателя не зависит от нагрузки. Чтобы изменять скорость синхронного двигателя, необходимо изменять частоту питания. Это достигается за счет использования частотно-регулируемого привода (VFD).
Связанные сообщения:
Асинхронный двигательНазвание асинхронного двигателя предполагает, что скорость ротора асинхронна со скоростью вращения магнитного поля статора.Точнее, ротор асинхронного двигателя вращается с относительно меньшей скоростью, чем статор RMF. Это связано с наличием проскальзывания между его скоростью статора и ротора.
Ротор асинхронного двигателя представляет собой короткозамкнутый ротор или ротор с обмоткой. Ротор с короткозамкнутым ротором состоит из тяжелых медных стержней, соединенных на конце проводящим кольцом, которое электрически закорачивает их вместе. Ротор с обмоткой состоит из нескольких обмоток поверх многослойного стального сердечника.
Вращающееся магнитное поле статора вызывает индуцированный ток в роторе. Этот индуцированный ток течет внутри ротора, создавая собственное магнитное поле. Согласно закону Ленца, это поле ротора противостоит причине, которая его порождает, и пытается устранить ее, догоняя скорость статора RMF (синхронную скорость). При этом ротор вращается в направлении RMF статора. Асинхронный двигатель также известен как асинхронный двигатель , поскольку он работает по принципу индукции.
Асинхронный двигатель никогда не может работать на синхронной скорости, вместо этого она всегда ниже, чем синхронная скорость, и это зависит от скольжения двигателя. Причина в том, что индуцированный ток в роторе генерируется из-за разницы между полем статора и ротора. если в случае, если он работает с синхронной скоростью, это означает, что ротор магнитно заблокирован и между полем статора и ротора нет разницы. Следовательно, не будет магнитного потока, индуцирующего ток в роторе.Магнитный поток необходим для асинхронного двигателя, поэтому он должен работать с меньшей скоростью, чем его синхронная скорость.
Ротор с короткозамкнутым ротором имеет более простую конструкцию и позволяет наведенному току проходить через медные шины. В то время как заведенный ротор позволяет пользователю изменять ток ротора во время его запуска, как это используется в «Пускателе двигателя». Дело в том, чтобы безопасно запустить двигатель, уменьшив огромный пусковой ток, потребляемый асинхронным двигателем. Обычно это делается путем последовательного подключения переменного резистора к обмоткам ротора с помощью контактных колец.
Скорость асинхронного двигателя зависит от скольжения двигателя, которое изменяется в зависимости от нагрузки и сопротивления ротора. Другими словами, скорость асинхронного двигателя может изменяться в зависимости от нагрузки или за счет изменения сопротивления ротора.
Связанное сообщение:
Различия между синхронным двигателем и асинхронным двигателемВ следующей таблице показаны основные различия между синхронным двигателем и асинхронным (асинхронным) двигателем.
| Синхронный двигатель | Асинхронный двигатель |
| Синхронный двигатель – это тип двигателя переменного тока, который работает с синхронной скоростью. | Асинхронный двигатель – это тип двигателя переменного тока, который работает со скоростью, меньшей, чем синхронная скорость. |
| Он работает по принципу магнитной блокировки между полем ротора и статора. | Он работает по принципу электромагнитной индукции между статором и ротором. |
| Нет скольжения, т.е. скольжение синхронного двигателя равно 0. | В асинхронном двигателе есть скольжение, и оно всегда больше 0. |
| Скорость двигателя зависит от частоты питания и количество полюсов статора. Н с = 120 f / P | Скорость двигателя зависит от нагрузки, сопротивления ротора и скольжения, с. она всегда меньше синхронной скорости. N = N с (1-с) N |
| Скорость не меняется при изменении нагрузки, подключенной к двигателю. | Скорость меняется в зависимости от нагрузки двигателя. |
| Он не запускается автоматически и требует дополнительных обмоток для запуска двигателя. | Асинхронные двигатели самозапускаются и не требуют дополнительного механизма. |
| Ротор требует дополнительного источника тока. | Ротор асинхронного двигателя не требует дополнительного питания. |
| Синхронному двигателю с независимым возбуждением требуется дополнительный источник постоянного тока для питания обмотки ротора. | Не требует дополнительных источников. |
| Также необходимы контактные кольца и щетки для подачи постоянного тока на обмотки ротора. | Для этого не требуются контактные кольца, однако, намотанный тип может использовать контактные кольца для управления скоростью. |
| Скорость двигателя регулируется только путем изменения частоты питания с помощью частотно-регулируемого привода. | Скорость двигателя можно регулировать с помощью переменного сопротивления ротора, а также устройств с частотно-регулируемым приводом. |
| Источник входного напряжения не изменяет скорость или крутящий момент синхронного двигателя. | Источник входного напряжения можно использовать для изменения крутящего момента и скорости двигателя. |
| Колебания основного напряжения питания не влияют на работу синхронного двигателя. | Колебания сетевого напряжения влияют на его скорость и работу. |
| Начальная стоимость выше, чем у асинхронного двигателя. | Асинхронные двигатели дешевле. |
| Операция сложная. | Операция проста и удобна для пользователя. |
| Если предлагают высокую эффективность и точность. | Они не так эффективны, как синхронный двигатель. |
| Может легко работать на очень низкой скорости с помощью частотно-регулируемого привода. | Работать на малой скорости довольно сложно. |
| Лучше всего работает на более низких оборотах, обычно ниже 300 об / мин. | Лучше всего подходит для работы на скорости выше 600 об / мин. |
| Он может работать с отстающим, опережающим или единичным коэффициентом мощности, регулируя его возбуждение. | Асинхронный или асинхронный двигатель всегда работает с отстающим коэффициентом мощности. |
| Он также может одновременно использоваться для коррекции коэффициента мощности, используя его в качестве опережающего коэффициента мощности. | Его нельзя использовать для корректировки коэффициента мощности, а только для управления механическими нагрузками. |
| Поскольку он работает с постоянной скоростью, резкое изменение нагрузки вызовет колебания потребляемого тока. | В асинхронном двигателе такого явления нет. |
Вывод этой статьи состоит в том, что синхронные двигатели эффективны, но дороже и используются для приложений со сверхнизкими оборотами, предлагая при этом функцию коррекции коэффициента мощности. С другой стороны, асинхронные двигатели используются для высоких оборотов с регулируемой скоростью, будучи недорогими и простыми в эксплуатации.
Связанный пост об электрических двигателях.
Почему вы должны использовать трехфазный асинхронный двигатель с частотно-регулируемым приводом переменного тока (VFD)
Частотно-регулируемый привод (VFD) – это тип привода с регулируемой скоростью, используемый для управления электродвигателями, приводимыми в действие переменным током (AC ). В промышленности используются два основных типа двигателей переменного тока: синхронные и индукционные. Есть несколько причин, по которым вы должны использовать трехфазный асинхронный двигатель с вашим частотно-регулируемым приводом.
Блог по теме: 5 вещей, которые необходимо знать перед проектированием центра управления двигателями
Какие типы двигателей есть у Mader?
Синхронные двигатели в сравнении с асинхронными двигателями
Синхронные двигатели переменного тока работают с использованием роторов, которые вращаются с точно такой же скоростью, что и вращающиеся магнитные поля.Двигателю требуется источник постоянного тока (DC) для создания потока электричества в обмотки статора и создания вращающегося электромагнитного поля. Полная блокировка между статором и направлением вращения ротора определяет, что двигатель работает синхронно или вообще не работает.
Асинхронные двигатели – это наиболее распространенные двигатели, используемые в промышленном оборудовании, таком как насосы, конвейеры и воздуходувки. Они также работают с использованием электромагнитных полей, но классифицируются по количеству фаз.«Фаза – это количество отдельных электрических токов, активирующих катушки, расположенные вокруг статора.
В трехфазном двигателе три тока используются для питания трех или кратных трех катушек. Трехфазные двигатели самозапускаются и не требуют внешнего источника постоянного тока. Скорость ротора в асинхронном двигателе изменяется в зависимости от колебания магнитной индукции, и это колебание приводит к тому, что ротор вращается с меньшей скоростью, чем скорость магнитного поля статора.
Какие условия влияют на скорость ротора асинхронного двигателя?
- Частота сети переменного тока
- Количество катушек, составляющих статор
- Нагрузка на двигатель
Чем выше требования к нагрузке, тем больше разница (скольжение) между скоростью ротора и скоростью вращающегося магнитного поля.Чтобы отрегулировать скорость асинхронного двигателя переменного тока, необходимо изменить частоту источника переменного тока, что является целью преобразователя частоты.
Трехфазный асинхронный двигатель и частотно-регулируемый приводДобавление частотно-регулируемого привода к трехфазному асинхронному двигателю позволяет изменять скорость двигателя в соответствии с его нагрузкой, экономя энергию. Напряжение и частота задаются точным методом при запуске двигателя, что также исключает потери энергии. Другие преимущества, включают:
- Увеличенный срок службы двигателя переменного тока
- Экономичное регулирование скорости
- Более низкая потребность в обслуживании, чем двигатель с постоянным током
Трехфазные асинхронные двигатели широко используются во многих отраслях промышленности, поскольку они самозапускающиеся, мощные и эффективные.Двигатели, управляемые с помощью частотно-регулируемого привода, являются наиболее эффективными, плавными и энергосберегающими.
Если у вас есть какие-либо вопросы о двигателях или вы хотите поговорить со специалистом о возможных вариантах, свяжитесь с Mader Electric сегодня и поговорите с членом нашей команды.
Блог по теме: частотно-регулируемый привод (ЧРП) Часто задаваемые вопросы
Характеристики асинхронного двигателя переменного тока | Протокол
Асинхронные двигатели переменного тока– это рабочие лошадки современной промышленности, поскольку они просты, прочны и надежны.Асинхронный двигатель состоит всего из двух основных частей. Первая – это неподвижная часть, называемая статором, которая состоит из неподвижных катушек вокруг полости. В полости подвешен ротор, который представляет собой пару концевых колец, покрывающих цилиндрическое расположение стержней. Это часто называют беличьей клеткой. Электрические параметры этих двух компонентов предоставляют информацию об эффективности двигателя и взаимосвязи между крутящим моментом и скоростью. Это важно для определения наилучшего размера и типа двигателя для конкретного применения.Это видео познакомит с основами работы асинхронного двигателя и продемонстрирует, как определить модель эквивалентной схемы для трехфазного асинхронного двигателя.
Трехфазный асинхронный двигатель переменного тока использует трехфазное питание, при этом каждая фаза подключена к своему собственному набору обмоток статора. Катушки расположены по схеме, которая создает одно магнитное поле для каждой фазы подаваемой мощности. Результирующее чистое магнитное поле, называемое магнитным полем статора, вращается с постоянной угловой скоростью.Вращающийся магнитный поток индуцирует ток в роторе, аналогично тому, как трансформатор передает мощность от первичной обмотки ко вторичной. Ток через стержни беличьей клетки, в свою очередь, создает собственное магнитное поле, называемое индуцированным магнитным полем ротора. Взаимодействие между этими двумя полями создает силу на роторе, которая заставляет следовать за магнитным полем статора. Как железный стержень, движущийся вокруг магнитов. Если ротор точно следует за магнитным полем, как этот стержень, то двигатель синхронный.Однако в асинхронном двигателе ротор отстает от магнитного поля статора. Эта задержка, называемая скольжением, приводит к асинхронности асинхронных двигателей. Таким образом, асинхронный двигатель всегда будет вращаться медленнее, чем синхронная скорость. Крутящий момент увеличивается с уменьшением скольжения или с уменьшением скорости двигателя от синхронной до определенной точки, называемой моментом пробоя. При добавлении нагрузки скорость вращения уменьшается по мере увеличения скольжения, что приводит к уменьшению крутящего момента. Следующие ниже эксперименты покажут, как измерить различные электрические параметры асинхронного двигателя, чтобы описать двигатель с помощью модели эквивалентной схемы.
Для каждого из следующих тестов необходимо знать характеристики ротора, которые указаны на паспортной табличке двигателя. Для номинального напряжения 208 В при 60 Гц запишите номинальную мощность как в лошадиных силах, так и в ваттах. Также запишите номинальный ток в амперах и номинальную скорость как в оборотах в минуту, так и в радианах в секунду. Номинальный крутящий момент может быть рассчитан и равен номинальной мощности, деленной на номинальную скорость. Здесь вал асинхронного двигателя приводит в действие генератор постоянного тока. Электрическая нагрузка на генератор постоянного тока напрямую связана с поступающей в него механической мощностью.И, в свою очередь, действует как механическая нагрузка на асинхронный двигатель. Сначала установите ограничение тока блока питания постоянного тока на 1,8 А, затем выключите его. Этот тест на постоянном токе измеряет сопротивление только обмотки статора, поскольку для асинхронного двигателя с короткозамкнутым ротором доступны только клеммы статора. Подключите выход источника питания к клеммам статора A и B. Включите источник питания и запишите его выходное напряжение и ток. Повторите эту процедуру для других двухфазных комбинаций B и C, а также C и A.Для каждой комбинации фаз рассчитайте сопротивление, разделив выходное напряжение на выходной ток. В результате для двух фаз, соединенных последовательно, сопротивление каждой фазы, R1, составляет половину этого значения. Сопротивление обмотки статора зависит от номинальной мощности двигателя и составляет для этого двигателя шесть Ом.
Протестируйте асинхронный двигатель без нагрузки, чтобы получить измерения, необходимые для дальнейших расчетов. Во-первых, отсоедините все клеммы генератора постоянного тока или динамометра, чтобы он не генерировал мощность и не оказывал механической нагрузки на асинхронный двигатель.При отключенном трехфазном источнике питания соберите аппарат. Установите переменную мощность на выход 0% и подключите ее к трехфазной розетке. Включите трехфазное питание и быстро увеличивайте выходной сигнал переменного тока, пока каждый из цифровых измерителей мощности не покажет около 208 вольт. Запишите измерения мощности, напряжения и тока с обоих измерителей. Сумма мощности, измеренной двумя цифровыми измерителями мощности, представляет собой мощность, потребляемую тремя фазами, действующими вместе. 1/3 этой мощности составляет одну фазу. Запишите крутящий момент двигателя и обозначьте его t-ноль, крутящий момент без нагрузки.Если устройство измерения крутящего момента плохо откалибровано, t-ноль может не обязательно равняться нулю. Затем используйте стробоскоп для измерения скорости вращения двигателя без нагрузки, которая близка к его синхронной скорости 1800 об / мин. Отрегулируйте курс и найдите регуляторы частоты, пока вал не станет неподвижным. Скорость двигателя обычно находится между номинальной скоростью, указанной на паспортной табличке, и синхронной скоростью. Преобразуйте частоту стробоскопа из числа оборотов в минуту в угловую скорость вращения без нагрузки, омега-ноль.Установите переменную мощность обратно на выход 0%, затем отключите трехфазное питание. Оставьте остальную часть аппарата нетронутой.
Тест при заблокированном роторе измеряет электрические параметры, когда двигатель неподвижен и не может вращаться. В этом состоянии возникает наибольшая разница в движении между полем ротора и статора. Для этого теста используйте настройку теста без нагрузки и отсоедините все клеммы генератора постоянного тока или динамометра. При отключенном трехфазном питании и выходе переменного тока 0% заблокируйте ротор на стороне двигателя постоянного тока с помощью механического зажима.За исключением заблокированного ротора, прибор такой же, как и для испытания на холостом ходу. Включите трехфазное питание и асинхронный двигатель. Медленно увеличивайте выходной сигнал вариационного диапазона до номинального тока на цифровых измерителях мощности. Запишите мощность, напряжение и ток с обоих счетчиков. Чтобы закончить, установите вариак на 0%, затем выключите трехфазное питание.
Фактически обмотка статора выполняет ту же функцию, что и первичная обмотка трансформатора, а ротор эквивалентен вторичной обмотке.Таким образом, двигатель может быть смоделирован с использованием эквивалентной схемы, аналогичной схеме трансформатора. Однако схема упрощена для удаления идеальной части трансформатора и относится к компонентам ротора как к отражению статора. Пофазная эквивалентная схема включает сопротивление обмотки статора R1, рассчитанное по результатам испытания постоянным током. Статор также противодействует изменениям тока и напряжения, называемым реактивным сопротивлением X1. Параметры ротора отражаются от статора, включая отраженное сопротивление, R2 Prime, и отраженное реактивное сопротивление ротора, X2 prime.Взаимное намагничивающее реактивное сопротивление, параметр XM является эквивалентом магнитного потока в воздушном зазоре между ротором и статором. Наконец, между статором и ротором происходит потеря мощности, которая моделируется как эквивалентное сопротивление потерь в сердечнике, RC. Все эти значения могут быть рассчитаны на основе продемонстрированных тестов и подробно описаны в протоколе испытаний.
Асинхронные двигатели переменного токашироко используются в различных областях применения благодаря своей простоте, прочности и надежности. Асинхронный двигатель часто выбирают на основе его линейной скорости крутящего момента при изменяющейся механической нагрузке.Нагрузочное испытание отслеживает линейную характеристику крутящего момента и скорости при изменении механической нагрузки. Для этого испытания к асинхронному двигателю подключают генератор постоянного тока или динамометр, чтобы обеспечить контролируемую нагрузку на ротор. Устройство собрано с сопротивлением нагрузки R-L 300, 200 или 100 Ом. Измерения мощности, напряжения и тока записываются с подключенных счетчиков. Затем измеряются показания крутящего момента и скорость вращения с учетом сопротивления нагрузки и без него. График характеристик крутящего момента и скорости асинхронного двигателя будет похож на эти кривые для четырех классов двигателей NEMA.Электронный микроскоп требует вакуумированной камеры для хранения образца и использует вакуумный насос, который может иметь небольшой асинхронный двигатель. Вакуум в камере обеспечивает передачу электронов к образцу и от образца к устройству формирования изображения. Наконец, токарные станки и другое оборудование для механических цехов могут использовать более мощные трехфазные асинхронные двигатели. Из-за своей простоты и отсутствия механической коммутации асинхронные двигатели могут выдерживать интенсивное использование с уменьшенной вероятностью отказа.Эта жесткость является явным преимуществом при изготовлении металлических деталей.
Вы только что посмотрели введение Jove в асинхронные двигатели переменного тока. Теперь вы должны понять основной принцип работы и то, как выполнять тесты для определения их параметров эквивалентной схемы.
Разница между базовой и номинальной скоростью асинхронного двигателя
Асинхронный двигатель с короткозамкнутым ротором имеет две разные скорости. Синхронная скорость относится к вращающемуся магнитному полю статора, которое зависит от количества полюсов и частоты.Другая скорость – это скорость ротора. Скорость ротора всегда будет ниже скорости статора, мы называем это скольжением. Без скольжения асинхронный двигатель с короткозамкнутым ротором не имеет крутящего момента. Даже без нагрузки двигатель проскальзывает. Он увеличивается с нагрузкой, в соответствии с кривыми тока x крутящего момента, которые вы можете проверить.
Базовая скорость – это Гц, умноженная на 60, а затем результат делится на половину числа полюсов. Номинальная скорость – это базовая скорость за вычетом скольжения при полной номинальной нагрузке. Асинхронный двигатель замедляется по мере загрузки.
Асинхронный двигатель должен работать со скоростью ниже магнитного потока вращающегося статора. Движение вперед происходит из-за тока, протекающего в обмотке клетки. Ток в обмотке клетки является результатом перерезания магнитных линий. Скольжение пропорционально крутящему моменту нагрузки. Больше скольжения, больше тока в клетке. Таким образом, крутящий момент пропорционален потоку через воздушный зазор и току, протекающему в обмотке клетки.
Однако производитель асинхронного двигателя должен указать «что-то» на ярлыке двигателя, чтобы описать его.Затем он помещает что-то вроде напряжения, тока (FLA), полюсов, скорости, типа, частоты, изоляции, иногда крутящего момента и т. Д. Но все это значит? Например. если двигатель 460В (на бирке) можно ли запустить его на 380В? Конечно, можете, но остальные значения переменных двигателя также изменятся. Тогда производитель говорит, что вы собираетесь получить FLA со стандартным током со стандартным напряжением, а затем вы получите стандартное скольжение (скажем, 3%), которое позволит вам запустить двигатель на скорости, которая является стандартной для двигателя. .Скорость двигателя составляет об / мин = (60 * f) / (p / 2). Тогда при f = 60 Гц и p = 4 полюса вы получите 1800 об / мин, но это синхронная скорость двигателя, которой вы никогда не достигнете, если не запустите ее через VFD. Если вам нужна «реальная» скорость двигателя, вы можете найти ее, умножив синхронную скорость на (1-с), где «s» – это скольжение, тогда в нашем случае реальные об / мин = 1800 (1-0,03) = 1746 и это номинальная или стандартная скорость (скорость, указанная на паспортной табличке, или номинальная скорость). Однако обратите внимание, что это снова НОМИНАЛЬНАЯ нагрузка.
