
Драйвер шагового двигателя QJ6060AC, цена в Рефит
Драйвер QJ6060AC позволяет управлять биполярным двухфазным шаговым двигателем с максимальным током до 6А на фазу. Двигатель может управляться в режиме до 1/128 шага. Управление двигателем происходит с помощью 3 сигналов, подающихся на входы DIR, STEP и ENABLE. Такое управление обеспечивает возможность непосредственного подключения к порту LPT компьютера и взаимодействует с любой программой управления станками ЧПУ(CNC) и плоттерами как на пример Mach3, TURBOCNC, kCam, master5 и многими другими. Этот драйвер оборудован защитой от перегрева.
|
|||||||||||
 0А (пик. 7.2 А), 1/256 шага)
0А (пик. 7.2 А), 1/256 шага)Характеристики:
- Напряжение питания – ~ до 60В
- Встроенный стабилизатор напряжения
- Максимальный ток фазы – 6А
- Максимальная частота шагов – 50кГц
- Напряжение входных импульсов – от 5В до 24В (с внешним резистором)
- Размеры драйвера – 147×97х30мм
Наш контроллер шагового двигателя QJ6060AC, управление шаговым двигателем с очень низким энергопотреблением, прочный и экономически эффективный. Драйвер QJ6060AC позволяет управлять биполярным двухфазным шаговым двигателем и взаимодействует с любой программой управления станками ЧПУ (CNC). Они пользуются высоким спросом в национальных, так и международных рынках.
Мы стали популярными среди наших клиентов, предлагая широкий спектр, каталог драйверов шагового двигателя QJ6060AC. Мы предлагаем нашим клиентам Аналоговые драйверы шаговых двигателей, контроллер шагового двигателя после строгого контроля качества в различных параметров качества.
Мы предлагаем нашим клиентам Аналоговые драйверы шаговых двигателей, контроллер шагового двигателя после строгого контроля качества в различных параметров качества.
Чтоб не делать драйвер шагового двигателя своими руками звоните нам и мы доставим его вам в короткое время. Шаговый двигатель купить можно у нас со склада в Ивано-Франковске. Кстати цена на Шаговые двигатели у нас самая низкая на рынке Украины. Мы доставляем товар по Украине, поэтому звоните будем рады сотрудничеству.
Скачать документацию QJ6060AC
Цена за шт. с НДС* – грн.
* – указанные цены не являются публичной офертой, носят исключительно информационный характер и могут отличаться от действительных цен.
При питании драйверов с использованием трансформаторов или импульсных блоков питания желательно применять устройство плавного пуска для защиты оборудования от пусковых токов.
Также возможное использование выпрямителя, если требуется питание постоянным током, а блоком питания служит трансформатор.
Похожие товары
Добавить комментарий
Драйвер биполярного шагового двигателя своими руками
Драйвер биполярного шагового двигателя своими руками
Схема униполярного драйвера шагового двигателя на mosfet.Драйвер шагового двигателя a4988: описание, подключение.Плата драйвера двухфазного биполярного шагового двигателя x.
Драйвер биполярного шагового двигателя на транзисторах. Драйвер униполярного шагового двигателя youtube. Драйвер шагового двигателя usb на микроконтроллере avr.Подключение униполярного шагового двигателя.
Драйвер шагового двигателя своими руками управление.
Шаговый двигатель: устройство, принцип работы, типы, схемы.

Stepper motor driver (74194) | drivers for stepping motor | proyectos.
Контроллер биполярного шагового двигателя.
Контроллер маломощного униполярного шагового двигателя.
Драйвер биполярных шаговых двигателей.
Радиокот:: 4-х осевой step/dir контроллер шаговых двигателей. Драйверы униполярного и биполярного шагового двигателя.Шаговый двигатель простой драйвер для него youtube.
Драйвер шагового двигателя qj6060ac, цена в рефит.
Транексам инструкция по применению при беременностиКак запустить шаговый двигатель без электроники своими руками
У меня много различной оргтехники, которая вышла из строя.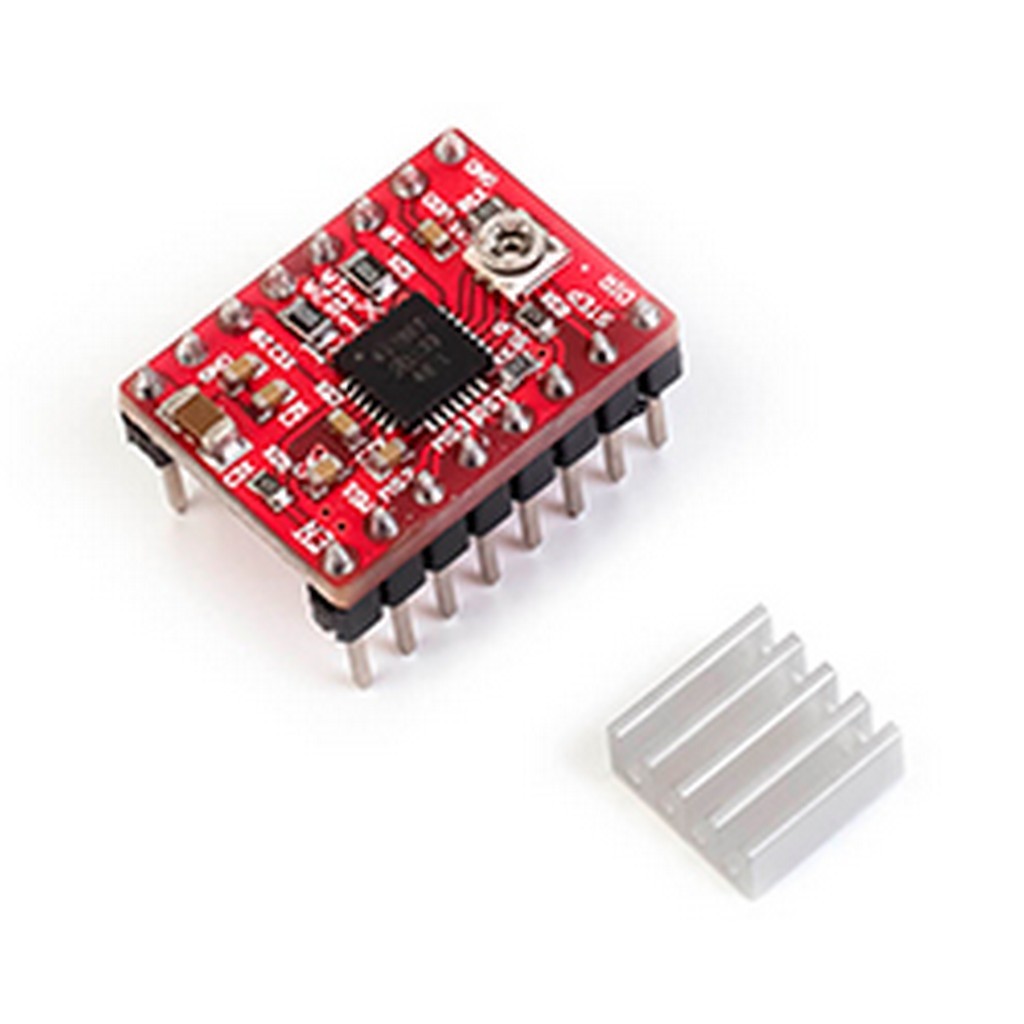 Выбрасывать я её не решаюсь, а вдруг пригодится. Из её частей возможно сделать что-нибудь полезное.
Выбрасывать я её не решаюсь, а вдруг пригодится. Из её частей возможно сделать что-нибудь полезное.К примеру: шаговый двигатель, который так распространен, обычно используется самодельщиками как мини генератор для фонарика или ещё чего. Но я практически никогда не видел, чтобы его использовали именно как двигатель для преобразования электрической энергии в механическую. Оно и понятно: для управления шаговым двигателем нужна электроника. Его просто так к напряжению не подключишь.
И как оказалось – я ошибался. Шаговый двигатель от принтера или ещё от какого устройства, довольно просто запустить от переменного тока.
Я взял вот такой двигатель.
Обычно у них четыре вывода, две обмотки. В большинстве случаем, но есть и другие конечно. Я рассмотрю самый ходовой.
Схема шагового двигателя
Его схема обмоток выглядит примерно так:
Очень похоже на схему обычного асинхронного двигателя.
Для запуска понадобится:
- Конденсатор емкостью 470-3300 мкФ.

- Источник переменного тока 12 В.
Замыкаем обмотки последовательно.
Середину проводов скручиваем и запаиваем.
Подключаем конденсатор одним выводом к середине обмоток, а вторым выводом в источнику питания на любой выход. Фактически конденсатор будет параллелен одной из обмоток.
Подаем питание и двигатель начинает крутиться.
Если перекинуть вывод конденсатора с одного выхода питания на другой, то вал двигателя начнет вращаться в другую сторону.
Все предельно просто. А принцип работы этого всего очень прост: конденсатор формирует сдвиг фаз на одной из обмоток, в результате обмотки работают почти попеременно и шаговый двигатель крутится.
Очень жалко то, что обороты двигателя невозможно регулировать. Увеличение или уменьшение питающего напряжения ни к чему не приведет, так как обороты задаются частотой сети.
Хотелось бы добавить, что в данном примере используется конденсатор постоянного тока, что является не совсем правильным вариантом.
 И если вы решитесь использовать такую схему включения, берите конденсатор переменного тока. Его так же можно сделать самому, включив два конденсатора постоянного тока встречно-последовательно.
И если вы решитесь использовать такую схему включения, берите конденсатор переменного тока. Его так же можно сделать самому, включив два конденсатора постоянного тока встречно-последовательно.Сморите видео
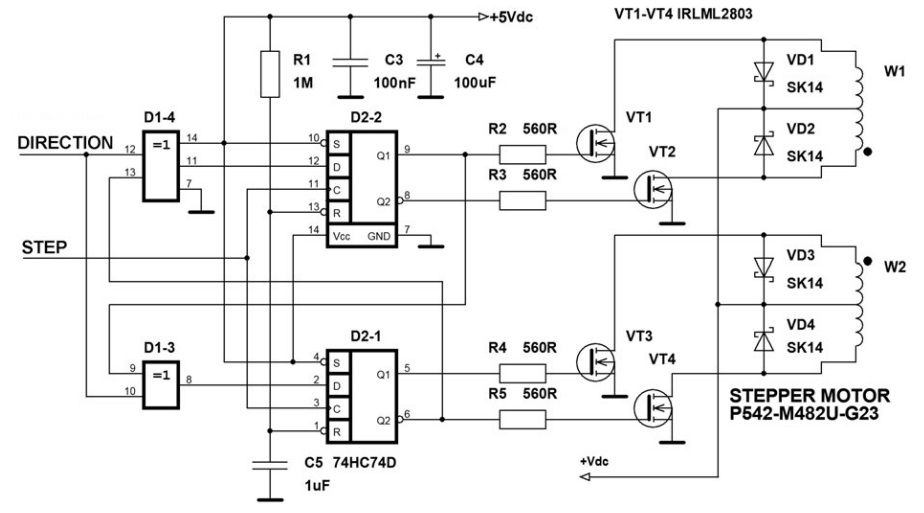
Все своими руками Простая схема управления шаговым двигателем
Опубликовал admin | Дата 10 января, 2014Схема управления шаговым двигателем приведена на рисунке 1. Схема реализована на микросхемах простой логики. В ней используются три микросхемы К561ЛА7 и одна К561ТМ2. В качестве мощных ключей для коммутирования обмоток шагового двигателя применены составные транзисторы КТ829А, способные выдерживать ток до семи ампер.
При нажатии на одну из кнопок двигатель начинает вращаться в ту или иную сторону.
На микросхеме DD1 собран генератор импульсов, изменение частоты этого генератора влечет за собой изменение частоты вращения шагового двигателя. Каждый импульс данного генератора поворачивает ротор на один шаг. На микросхемах DD2 и DD3 собраны логические элементы «исключающие или» и совместно с двумя триггерами DD4.1 и DD4.2, микросхемы К561ТМ2, образуют схему двухразрядного кольцевого счетчика для коммутации обмоток. Схема обеспечивает работу шагового двигателя в полушаговом режиме.
Почти все элементы схемы смонтированы на печатной плате. На плате нет микросхемного стабилизатора напряжения, демпфирующих диодов, кнопок и конденсаторов фильтра. При необходимости их можно разместить на плате, изменив немного ее топологию. Скачать схему и рисунок печатной платы можно здесь.
Скачать “простая схема управления шаговым двигателем”
Обсудить эту статью на – форуме “Радиоэлектроника, вопросы и ответы”.
Просмотров:36 210
| о компании | |||||||
Приводные Технологии – развивающаяся компания малого бизнеса, основным видом деятельности которой является производство, маркетинг и промоушинг, бытовой и промышленной, доступной и надежной приводной техники. Интеграция новейших технологий современного редукторостроения к отечественным условиям производства, – особенность наших технических решений, предлагаемых рынку. Современные запросы приводов стали более требовательны к механической передаточной части, к подводимому электрическому оборудованию, к последующим приводным муфтам и др. Наши предложения редукторных мини-моторов, редукторных узлов и силовых передаточных машин предназначены для эксплуатации в разных отраслях, для достижения различных целей, с любым набором требований и т.д. Помимо всего этого, имеется широкий выбор электрических устройств для оперативного контроля и регулирования режимов работы привода, – так называемая, область приводной электроники. Интеграция новейших технологий современного редукторостроения к отечественным условиям производства, – особенность наших технических решений, предлагаемых рынку. Современные запросы приводов стали более требовательны к механической передаточной части, к подводимому электрическому оборудованию, к последующим приводным муфтам и др. Наши предложения редукторных мини-моторов, редукторных узлов и силовых передаточных машин предназначены для эксплуатации в разных отраслях, для достижения различных целей, с любым набором требований и т.д. Помимо всего этого, имеется широкий выбор электрических устройств для оперативного контроля и регулирования режимов работы привода, – так называемая, область приводной электроники.подробнее | |||||||
| |||||||
 ….. подробнее
….. подробнее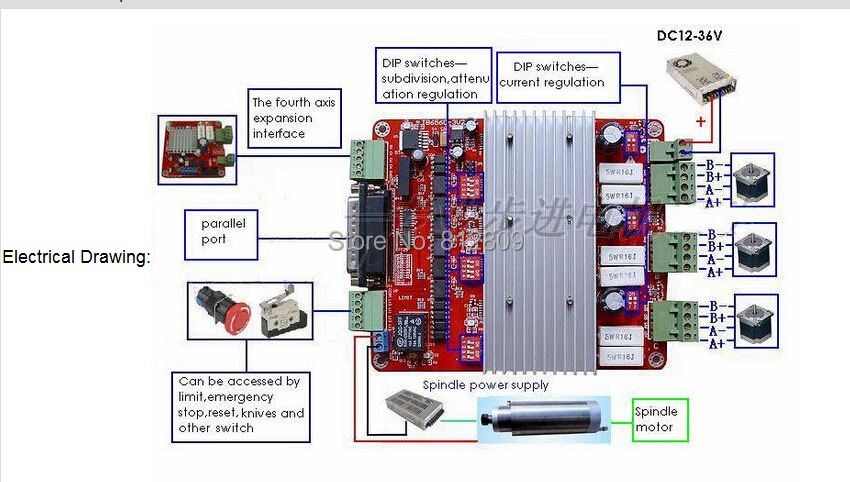 ….. подробнее
….. подробнееТестер-драйвер шагового двигателя
Когда я начал собирать свой первый самосборный 3D принтер (вариация на тему HyberCube Evolution, но об этом позже), то уже на одном из первых этапов возникла необходимость покрутить шаговые двигатели оси Z, а плата управления еще не пришла. Да и честно сказать, слишком много работы для такой простой задачи. Ведь надо сконфигурировать и залить прошивку, подключить питание, дисплей, двайверы, все это временно подвесить на соплях, сильно повышая шансы на случайное замыкание и досрочный выход из строя самой дорогой запчасти. Да и ждать не охота, вся работа встала из-за того, что мне нечем крутануть туда-сюда один или два движка для подстройки расположения механических компонентов. Руками? Не так быстро, а главное — не точно. Ну как вы крутанете одновременно два мотора, скажем на 100 оборотов (каждый оборот — 200 шагов), не ошибившись ни на шаг, т. к. это вызовет перекос? И вообще, хочется «погонять» ось приближенно к «боевым условиям», чтобы оно само гудело и ездило. Ровно и быстро. В общем, пришлось что-то выдумывать.
Ровно и быстро. В общем, пришлось что-то выдумывать.
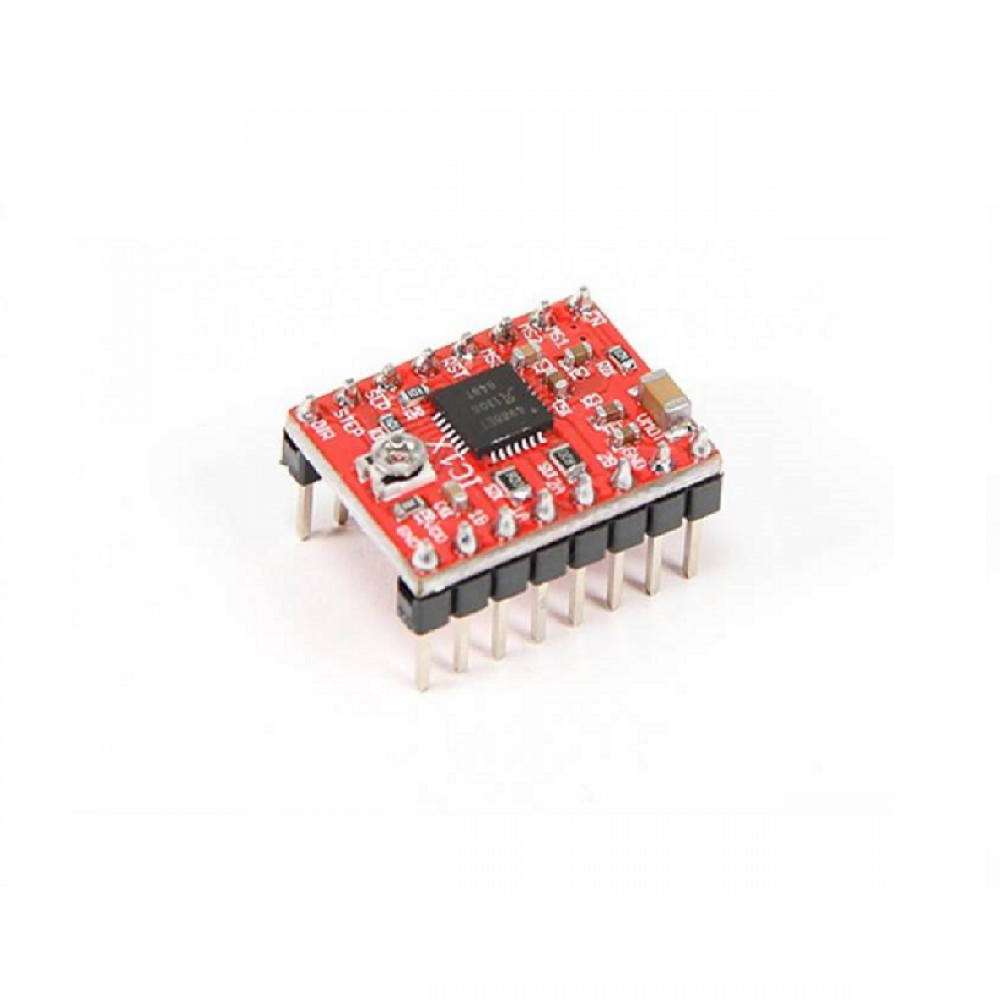
Так как у меня уже была горсть дешевейших и надежнейших драйверов А4988, которые суют во все китайские 3D принтеры по-умолчанию, задачу я решил «в лоб». Что там нужно, чтобы этот драйвер крутил вот такой биполярный шаговик (у меня стандартные NEMA 17 48мм)? Всего лишь указать драйверу направление (вывод DIR) логическим уровнем и подать импульсы на вывод STEP. Ну и подключить шаговик и питание, естественно. В итоге образовалась вот такая простая схема, оказавшаяся удобной и практичной. Все есть: «крутилка» скорости, тумблер «туда-сюда», тумблер «крутить/стоять». Джамперами JP1…JP3 можно выставить микрошаг в диапазоне от полного шага до 1/16, хотя на практике оказалось достаточно полношагового режима, но лишняя возможность может пригодиться. Итак, схема.
На популярном таймере 555 собран регулируемый генератор импульсов частотой примерно от 80 до 900 Герц (в режиме полного шага мотор крутится в диапазоне от «едва ползет» до «мчится со свистом»). Импульсы через тумблер SW1 попадают на вход STEP драйвера А4988, это режим «крутить». Если тумблер разомкнуть, драйвер перейдет в режим торможения (удерживания) мотора. Чтобы «отпустить» моторы, надо снять питание с драйвера. Тумблер SW2 переключает направление вращения шагового мотора. Резисторы R6 и R7 «подтягивают» соответствующие входы к «земле», на плате этих резисторов почему-то нет, хотя все прочие входы имеют «подтягивающие» к «земле» внутрисхемные резисторы. Вообще номиналы резисторов могут варьироваться в достаточно широких пределах, плюс-минус процентов 30 точно, схема сохраняет работоспособность. Точно так же не критична емкость конденсаторов, в принципе от 10нФ до 1мкФ пойдет любая керамика. Исключение — конденсатор С1, который желательно использовать пленочный. Значение емкости определяет диапазон частот, вместе с переменным резистором Р1. Номиналы С1 и Р1 можно изменять в широких пределах, сохраняя их произведение, как в исходной схеме. Скажем, можно взять емкость С1 0,47мкФ, но переменник Р1 тогда применить 20кОм.
Импульсы через тумблер SW1 попадают на вход STEP драйвера А4988, это режим «крутить». Если тумблер разомкнуть, драйвер перейдет в режим торможения (удерживания) мотора. Чтобы «отпустить» моторы, надо снять питание с драйвера. Тумблер SW2 переключает направление вращения шагового мотора. Резисторы R6 и R7 «подтягивают» соответствующие входы к «земле», на плате этих резисторов почему-то нет, хотя все прочие входы имеют «подтягивающие» к «земле» внутрисхемные резисторы. Вообще номиналы резисторов могут варьироваться в достаточно широких пределах, плюс-минус процентов 30 точно, схема сохраняет работоспособность. Точно так же не критична емкость конденсаторов, в принципе от 10нФ до 1мкФ пойдет любая керамика. Исключение — конденсатор С1, который желательно использовать пленочный. Значение емкости определяет диапазон частот, вместе с переменным резистором Р1. Номиналы С1 и Р1 можно изменять в широких пределах, сохраняя их произведение, как в исходной схеме. Скажем, можно взять емкость С1 0,47мкФ, но переменник Р1 тогда применить 20кОм.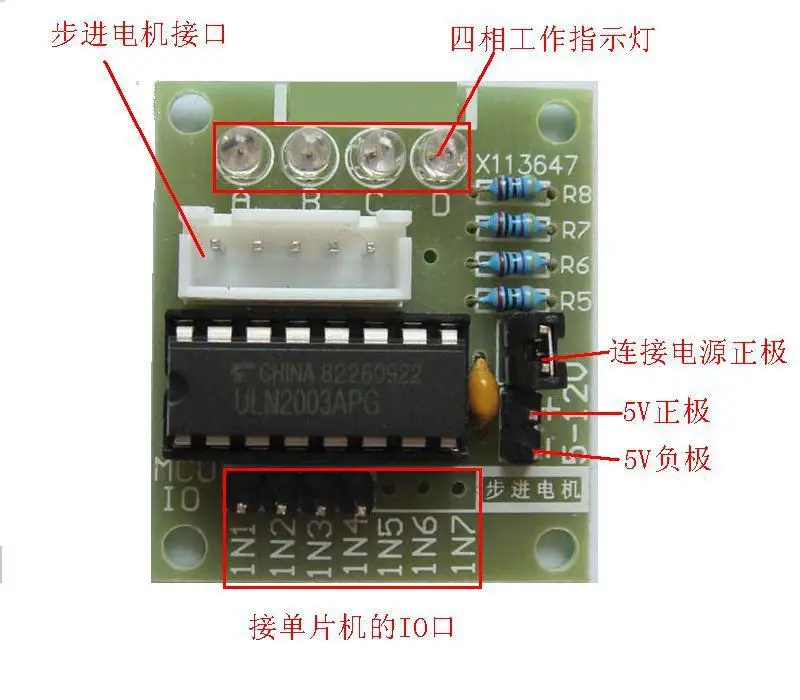 Диапазон частот, конечно, несколько сузится, но работать все будет нормально. Стабилизатор 78L05 можно заменить любым подходящим на напряжение 3.3..5В. Входное напряжение не желательно применять менее 12В и более 24В, драйвер выдерживает ток обмоток мотора 1А длительно, превышать это значение не стоит. Кто не в курсе — на драйвере А4988, как на многих других, установлен миниатюрный подстроечный резистор, которым выставляется максимальный ток шагового двигателя. Выбор максимального тока зависит от типа вашего шагового двигателя, сама же процедура многократно описана в сети, повторяться не вижу смысла. Кто не знает — гуглим «A4988 max current».
Диапазон частот, конечно, несколько сузится, но работать все будет нормально. Стабилизатор 78L05 можно заменить любым подходящим на напряжение 3.3..5В. Входное напряжение не желательно применять менее 12В и более 24В, драйвер выдерживает ток обмоток мотора 1А длительно, превышать это значение не стоит. Кто не в курсе — на драйвере А4988, как на многих других, установлен миниатюрный подстроечный резистор, которым выставляется максимальный ток шагового двигателя. Выбор максимального тока зависит от типа вашего шагового двигателя, сама же процедура многократно описана в сети, повторяться не вижу смысла. Кто не знает — гуглим «A4988 max current».
Таблица для выставления дробления шагов драйвера А4988 джамперами JP1..JP3
Схему собрал на второпях разведенной двусторонней платке размером 75х35мм, где верхний слой фольги играет роль общего провода (GND). Такой тип плат упрощает разводку, да и одностороннего стеклотекстолита под рукой не было. Все «земляные» выводы компонентов паяются прямо на фольгу, без отверстий, на фото видно.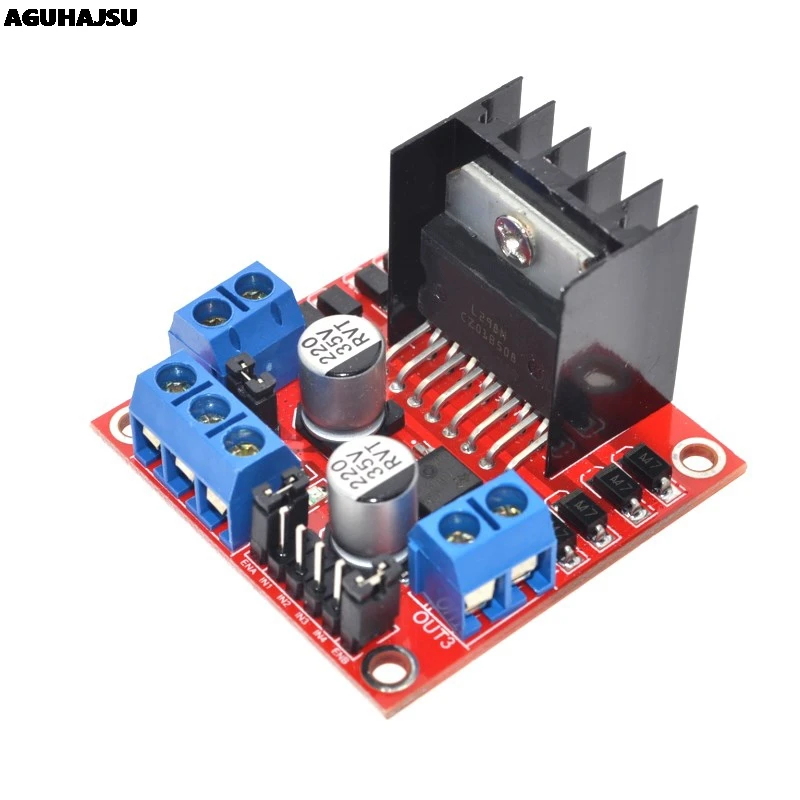 Панелька драйвера сделана из двух половинок распиленной панельки под выводную микросхему DIP16, также видно на фото (кликабельно). Плату в формате LAY прилагаю ниже, как и пару фоток, снятых на тапок. Номиналы деталей появляются при наведении на них курсора в программе Sprint Layout.
Панелька драйвера сделана из двух половинок распиленной панельки под выводную микросхему DIP16, также видно на фото (кликабельно). Плату в формате LAY прилагаю ниже, как и пару фоток, снятых на тапок. Номиналы деталей появляются при наведении на них курсора в программе Sprint Layout.
Печатная плата в формате Sprint Layout
Самодельный Драйвер Биполярного Шагового Двигателя Микрошаг
Cncjuniormaster.ucoz.com Блок контроллера униполярного шагового двигателя на PIC18F2320 V4. 1100 × 880 – 259k – jpg cncjuniormaster.ucoz.com Блок контроллера биполярного шагового двигателя на PIC18F2320 V5.1. 1949 × 1202 – 314k – jpg kazus.ru Контроллер шагового двигателя 1046 × 430 – 17k – gif forum.cxem.net Шаговый Привод На Pic Контроллере ( Самодельный) – PIC – Форум. 450 × 377 – 39k – jpg texvedkom.org Схемотехника привода шагового двигателя Техведком 1000 × 396 – 36k – gif we.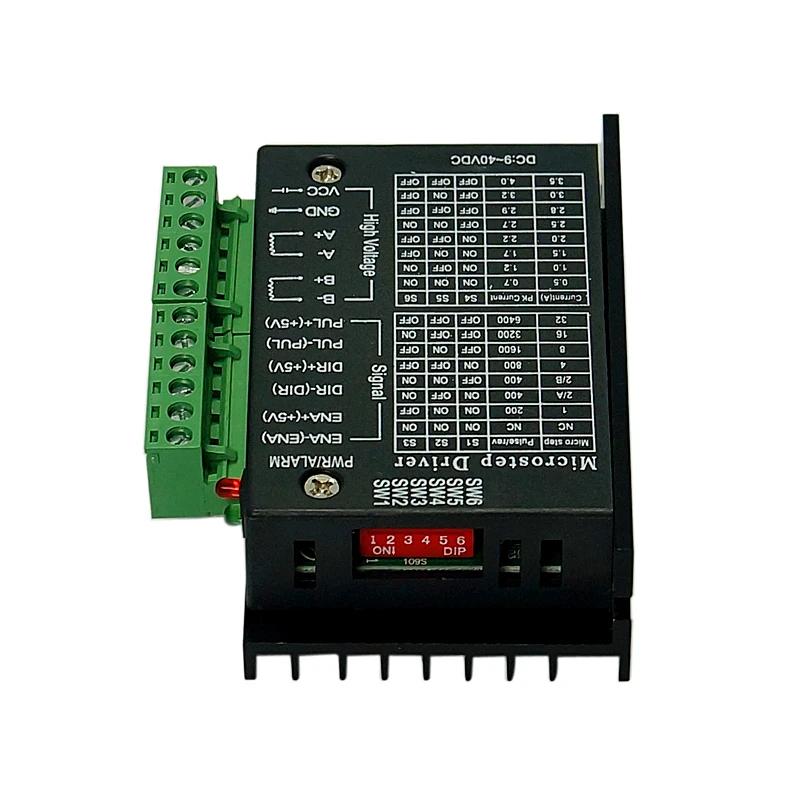 easyelectronics.ru Делаем контроллер шагового двигателя. 440 × 474 – 101k – png mozgochiny.ru Шаговый двигатель BYJ48.
easyelectronics.ru Делаем контроллер шагового двигателя. 440 × 474 – 101k – png mozgochiny.ru Шаговый двигатель BYJ48.
Теория управления 800 × 442 – 59k – jpg mypractic.ru Драйверы униполярного и биполярного шагового двигателя. 1024 × 519 – 56k – jpg offtop.ru Домашний станок ЧПУ 1200 × 432 – 51k – gif culibin.net Самодельный драйвер-контроллер шагового двигателя на A3977, A3979. 530 × 220 – 33k – png radiokot.ru РадиоКот:: 4-х осевой Step/Dir контроллер шаговых двигателей 500 × 545 – 15k – png cxem.net Драйвер биполярных шаговых двигателей 1200 × 843 – 74k – png forum.cxem.net Шаговый Привод На Pic Контроллере ( Самодельный) – PIC – Форум. 1024 × 575 – 116k – jpg detali-prof.ru Драйвер биполярных шаговых двигателей 709 × 390 – 10k – gif forum.cxem.net Шаговый Привод На Pic Контроллере ( Самодельный) – PIC – Форум.
500 × 333 – 36k – gif mysku.ru Микрошаговый драйвер A3967 для тестера РХХ автомобиля 800 × 465 – 75k – jpg forum.cxem.net Faq О Шаговых Двигателях – Роботы и модели на ДУ-управлении. 2456 × 1316 – 44k – gif profstroy-vl.ru Драйверы униполярного и биполярного шагового двигателя. 689 × 386 – 10k – gif profstroy-vl.ru Драйвер для коллекторного двигателя на полевых транзисторах 585 × 289 – 20k – jpg geektimes.ru Быстрые движения под высоким напряжением, или почти вся правда. 1920 × 803 – 273k – png.
2456 × 1316 – 44k – gif profstroy-vl.ru Драйверы униполярного и биполярного шагового двигателя. 689 × 386 – 10k – gif profstroy-vl.ru Драйвер для коллекторного двигателя на полевых транзисторах 585 × 289 – 20k – jpg geektimes.ru Быстрые движения под высоким напряжением, или почти вся правда. 1920 × 803 – 273k – png.
Статье: cnc, чпу, драйвер двигателя, контроллер шагового, микрошаг, шаговый двигатель, PIC18F2320. Своими руками Форум Драйвер биполярного ШД на транзисторах Форум Cтанок своими руками, чпу своими руками, cnc. Драйвер Sm-G313Hu. Самодельный станок с ЧПУ Использование шаговых двигателей.
adminСхема драйвера шагового двигателя
Введение
Драйвер шагового двигателя – это схема или устройство, которое обеспечивает необходимый ток и напряжение для шагового двигателя, чтобы он работал бесперебойно. Шаговый двигатель – это тип двигателя постоянного тока, который вращается ступенчато.
Основное различие между простым двигателем постоянного тока и шаговым двигателем заключается в том, что с помощью шагового двигателя мы можем добиться точного позиционирования с помощью цифрового управления.
Шаговый двигатель вращается точно за счет синхронизации импульсных сигналов от контроллера, которые подаются через драйвер.Драйвер шагового двигателя – это схема, которая принимает импульсные сигналы от контроллера и преобразует их в движение шагового двигателя.
В этом проекте мы разработали простую схему драйвера шагового двигателя на 12 В с использованием микросхемы таймера 555 (действующей как контроллер), счетчика декад CD4017 (действующего как драйвер) и нескольких других компонентов.
Принципиальная схема
Необходимые компоненты
- 555 Таймер IC
- CD4017 Счетчик декады Джонсона (10 декодированных выходов)
- 4 x 2N2222 NPN транзисторы
- 4 x 1N4007 PN переходные диоды
- 4 x 1 кОм 1/4 Вт)
- 2.Резистор 2 кОм (1/4 Вт)
- Резистор 470 Ом (1/4 Вт)
- Потенциометр 100 кОм (тип ручки)
- Керамический дисковый конденсатор 100 пФ (код – 101) (также читается как 0,1 нФ)
- Поляризованный конденсатор 1 мкФ 16 В
- Шаговый двигатель 12 В (униполярный – 5 проводов)
- Соединительные провода
- Макетная плата (макетная плата)
- Источник питания 12 В
Описание компонентов
Таймер 555 IC
IC 555 – очень известный таймер ИС, которая часто используется для временных задержек, генерации импульсов и многих приложений генератора.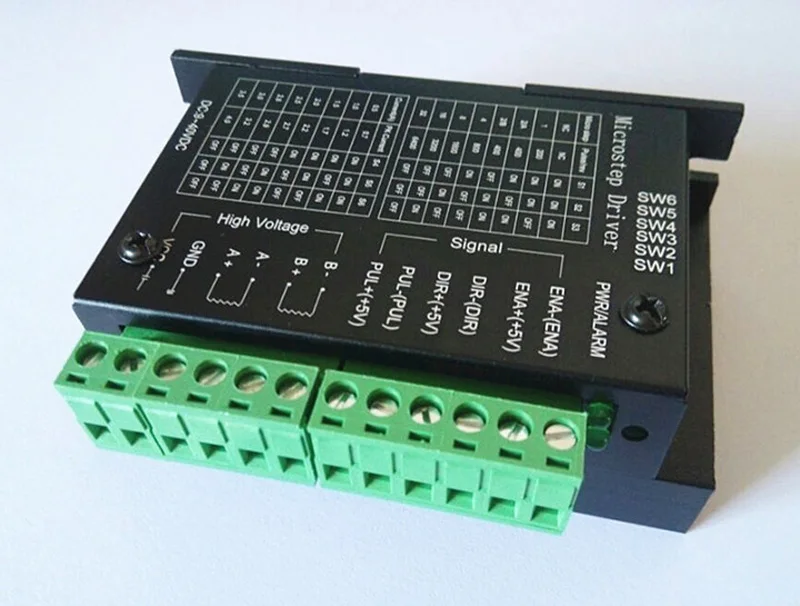 IC 555 имеет три режима работы: нестабильный мультивибратор (генератор импульсов), моностабильный мультивибратор (временные задержки) и бистабильный мультивибратор (триггер). В этом проекте мы использовали эту микросхему 555 для генерации импульса, то есть в нестабильном режиме работы.
IC 555 имеет три режима работы: нестабильный мультивибратор (генератор импульсов), моностабильный мультивибратор (временные задержки) и бистабильный мультивибратор (триггер). В этом проекте мы использовали эту микросхему 555 для генерации импульса, то есть в нестабильном режиме работы.
ИС счетчика декад CD4017
CD4017 – ИС счетчика, которая выдает 10 декодированных выходов и, следовательно, счетчик декады. Эти счетчики часто используются в дисплеях, операциях частотного деления, двоичных счетчиках и т. Д.
Но в этом проекте мы используем микросхему счетчика CD4017 в качестве драйвера шагового двигателя.И, следовательно, эта схема драйвера шагового двигателя по сути является схемой двоичного счетчика.
Шаговый двигатель
В этом проекте используется шаговый двигатель 12 В. Это шаговый двигатель униполярного типа с 5-проводной конфигурацией. В основном, шаговые двигатели классифицируются на униполярные шаговые двигатели и биполярные шаговые двигатели в зависимости от обмоток статора. На следующем изображении показан биполярный шаговый двигатель с его обмоткой.
На следующем изображении показан биполярный шаговый двигатель с его обмоткой.
Схема драйвера для униполярного шагового двигателя может быть построена с помощью нескольких транзисторов или транзисторной ИС Дарлингтона, такой как ULN2003.
Но для схемы драйвера биполярного шагового двигателя требуется соединение типа Н-мост. Следовательно, мы используем ИС с H-мостом, такие как L293D, для управления биполярными шаговыми двигателями.
Проектирование схем
Мы начнем с генератора прямоугольных импульсов, то есть микросхемы 555 в нестабильном режиме. Резистор 2,2 кОм подключен между VCC и разрядным контактом 555 (контакт 7).
Потенциометр 100 кОм подключается между разрядным контактом (контакт 7) и пороговым контактом (контакт 6), который, в свою очередь, закорочен с контактом триггера (контакт 2).
Конденсатор емкостью 1 мкФ подключен между контактом триггера (контакт 2) и GND. Байпасный конденсатор 100 пФ подключен к выводу управляющего напряжения (вывод 5). Другие контакты, то есть VCC (контакт 8), подключены к источнику питания 12 В, контакт сброса (контакт 4) к источнику питания 12 В и контакт заземления (контакт 1) к GND.
Другие контакты, то есть VCC (контакт 8), подключены к источнику питания 12 В, контакт сброса (контакт 4) к источнику питания 12 В и контакт заземления (контакт 1) к GND.
Выход микросхемы таймера 555, т. Е. Вывод 3, подается как вход тактового сигнала на микросхему счетчика CD4017, то есть на ее 14-й вывод. Контакты VDD и VSS CD4017, то есть контакты 16 и 8, подключены к источнику питания 12 В и заземлению соответственно.Контакт включения (контакт 13) подключен к земле.
Нам нужно управлять 4 клеммами катушек двух катушек в шаговом двигателе. Следовательно, нам нужно всего 4 выхода от драйвера. Это выходы от Q0 до Q3, то есть контакты 3, 2, 4 и 7 соответственно. Выходы счетчика подключены к базовым клеммам 4 транзисторов через отдельные резисторы 1 кОм.
Счетчик должен сбрасываться при пятом импульсе и, следовательно, Q4 (вывод 10), который только пятым выходом подключен к выводу сброса CD4017 i.е. контакт 15, и этот контакт подключен к GND через резистор 470 Ом.
Шаговый двигатель униполярного типа с 5-проводной конфигурацией. Центральный контакт закорочен внутри и подключен к источнику питания (здесь 12 В).
Остальные 4 вывода шагового двигателя являются концами двух катушек. Они должны быть подключены к клеммам коллектора четырех транзисторов.
Важно, чтобы они были подключены в последовательности срабатывания выходов. Наконец, между клеммами коллектора и питанием подключены четыре диода.Диоды очень важны, поскольку они защищают транзисторы от индуктивных всплесков.
Работа схемы драйвера шагового двигателя
Работа схемы драйвера шагового двигателя очень проста. Мы увидим пошаговое объяснение работы. Во-первых, микросхема таймера 555 настроена как нестабильный мультивибратор, т. Е. Действует как генератор прямоугольных сигналов.
В зависимости от положения потенциометра частота прямоугольной волны будет варьироваться от 7 Гц до 340 Гц.
Этот прямоугольный сигнал подается на ИС счетчика CD4017 в качестве тактового входа. Для каждого положительного перехода тактового сигнала, то есть перехода от низкого к высокому уровню, выход счетчика увеличивается на один счет.
Для каждого положительного перехода тактового сигнала, то есть перехода от низкого к высокому уровню, выход счетчика увеличивается на один счет.
Для первого положительного перехода по тактовому сигналу Q0 будет высоким, для второго положительного перехода Q1 будет высоким и так далее.
Так как нам нужно только 4 выхода, пятый выход, то есть Q4, подключен к выводу сброса, так что счетчик сбросится, и счет начнется снова.
Выходы микросхемы счетчика CD4017 подаются на 4 различных транзистора, которые, в свою очередь, подключены к 4 клеммам катушки шагового двигателя. Мы можем лучше понять следующую диаграмму.
Предположим, что точки A, B, C и D являются контактами катушек, подключенных к транзисторам. На общий провод в шаговом двигателе подается напряжение 12 В.
Когда первый тактовый сигнал подается на CD4017, Q0 становится ВЫСОКИМ. Это включит соответствующий транзистор.
В результате питание от общего провода идет через точку А на землю. Это возбуждает катушку и действует как электромагнит. Ротор притянется и повернется в это положение.
Ротор притянется и повернется в это положение.
Во время второго тактового импульса выход Q1 становится ВЫСОКИМ, и в результате связанный с ним транзистор включается. Теперь ток течет от общего провода к GND через точку B.
Следовательно, эта катушка будет находиться под напряжением и превратится в электромагнит. Это приведет к дальнейшему вращению ротора.Этот процесс продолжается, и в зависимости от частоты тактового сигнала изменяется скорость вращения шагового двигателя.
Преимущества
- Здесь разработан драйвер шагового двигателя DIY типа, который может управлять униполярными шаговыми двигателями.
- Используя этот драйвер шагового двигателя, мы можем избежать дорогостоящих специализированных плат драйверов шагового двигателя.
Недостатки
- Такая конструкция неэффективна.
- Требуется много сложной проводки для небольшого приложения.
Конструкция и вывод видео
diy драйвер шагового двигателя
Контроллер шагового двигателя DIY: 6 шагов (с изображениями) – Instructables
Контроллер шагового двигателя DIY: помните об этих двигателях постоянного тока, все, что вам нужно, это подключить положительный и отрицательный выводы к батарее и начать работу …
Драйверы шагового двигателя – Instructables
Простые в сборке схемы шагового двигателя и привода фрезерного станка с ЧПУ. … Шаговый двигатель и сервопривод Arduino Shield – плата AW GCSE…. Простой драйвер шагового двигателя для проектов с ЧПУ Arduino.
Драйвер шагового двигателя – Электроника DIY
Шаговые двигатели сегодня повсюду в электронике. Существует два основных типа шаговых двигателей: 1. Биполярные двигатели. Они имеют две катушки и управляются …
Создание лучшего драйвера биполярного шагового двигателя – Общие обсуждения . ..
..
14 сентября 2018 г. – Несколько лет назад я начал создавать драйверы шагового двигателя. Сначала это был простой однополярный драйвер. Мои моторы не вращались быстрее 1-2 об / с.
Схема драйвера шагового двигателя – Концентратор электроники
4 июля, 2017 – Драйвер шагового двигателя – это схема, которая принимает импульсные сигналы от …. Здесь разработан драйвер шагового двигателя DIY типа, который может управлять …
Building Bipolar драйвер шагового двигателя с нуля | Все о …
https: // ›…› Встроенные системы и микроконтроллеры
21 марта 2016 г. – Цена готовых драйверов шаговых двигателей в наши дни настолько низка, что экономически нецелесообразно делать драйверы своими руками . Даже если бы у вас было…
Контроллер шагового двигателя DIY: 6 шагов (с изображениями) – Instructables
Контроллер шагового двигателя DIY: помните об этих двигателях постоянного тока, все, что вам нужно, это также подключить положительный и отрицательный выводы к батарее и начать работу. …
…
Драйверы шагового двигателя – Instructables
Простые в сборке схемы шагового двигателя и привода фрезерного станка с ЧПУ. … Шаговый двигатель и сервопривод Arduino Shield – плата AW GCSE. … Простой драйвер шагового двигателя для проектов с ЧПУ Arduino.
Драйвер шагового двигателя – Электроника DIY
Шаговые двигатели сегодня повсюду в электронике.Существует два основных типа шаговых двигателей: 1. Биполярные двигатели. Они имеют две катушки и управляются …
Создание лучшего драйвера биполярного шагового двигателя – Общие обсуждения …
14 сентября 2018 г. – Несколько лет назад я начал создавать драйверы шагового двигателя. Сначала это был простой однополярный драйвер. Мои моторы не вращались быстрее 1-2 об / с.
Схема драйвера шагового двигателя – Электронный узел
4 июля 2017 г. – Драйвер шагового двигателя – это схема, которая принимает импульсные сигналы от…. Здесь разработан драйвер шагового двигателя типа “сделай сам”, который может управлять . ..
..
Создание драйвера биполярного шагового двигателя с нуля | Все о …
https: // ›…› Встроенные системы и микроконтроллеры
21 марта 2016 г. – Цена готовых драйверов шаговых двигателей в наши дни настолько низка, что экономически нецелесообразно делать драйверы своими руками . Даже если бы у вас был …
Схема простого драйвера шагового двигателя с использованием микросхемы таймера 555
15 мая 2015 – Эта простая схема драйвера шагового двигателя использует микросхему таймера 555 и может быть использована… Подпишитесь ниже, чтобы получать самые популярные новости, статьи и DIY …
DIY Плата драйвера шагового двигателя Arduino – Cerebral Meltdown
Эта страница покажет вам, как собрать простую плату драйвера шагового двигателя, которой можно управлять с помощью Arduino. Я построил свою для использования с моим гелиостатом …
Сортировать по: DefaultName (A – Z) Имя (Z – A) Цена (Низкая> Высокая) Цена (Высокая> Низкая) Рейтинг (Наивысший) Рейтинг (Наименьший) Модель (A – Z) Модель (Z – A)
Показывать: 20255075100
-21%
Артикул: DM332T Это цифровой шаговый привод с передовой технологией управления шаговым двигателем. Он прост в использовании и может использоваться для плавного управления 2-фазными и 4-фазными двигателями (от Nema 17-Nema 23) с меньшим нагревом и шумом. Оно работает ..
Он прост в использовании и может использоваться для плавного управления 2-фазными и 4-фазными двигателями (от Nema 17-Nema 23) с меньшим нагревом и шумом. Оно работает ..
19,50 $ 15,50 $ Начиная с: 14,82 $
-21%
Артикул: DM556T 28,00 $ 22,05 $ Начиная с: 21,18 $
-20%
Артикул: DM860I 40,50 долл. США 32,31 долл. США Начиная с: 30,92 $
-25%
Артикул: DM2282TDM2282T – это полностью цифровой шаговый привод, разработанный с использованием усовершенствованного алгоритма управления DSP, основанного на новейшей технологии управления движением.Он достиг уникального уровня плавности системы, обеспечивая оптимальный крутящий момент и средние значения нуля.
150,97 долл. США Начиная с: 119,18 $
Артикул: 3DM2283T 3DM2283T – это полностью цифровой шаговый привод, разработанный с использованием усовершенствованного алгоритма управления DSP, основанного на новейшей технологии управления движением. Он достиг уникального уровня плавности системы, обеспечивая оптимальный крутящий момент и средние значения нуля.
Он достиг уникального уровня плавности системы, обеспечивая оптимальный крутящий момент и средние значения нуля.
150,97 долл. США Начиная с: 119,18 $
Контроллер шагового двигателя | Hackaday
Если вам нужно простое и легкое введение в работу с шаговыми двигателями, посмотрите короткое видео [IMSAI Guy], в котором он проектирует очень простой контроллер шагового двигателя и по ходу дела извлекает из него множество быстрых уроков.(Встроено ниже.)
Он сначала рассматривает основы шагового двигателя в практическом, практическом подходе, а также показывает нам, как прозвонить соединения, если распиновка неизвестна. Затем он демонстрирует шаговый двигатель вручную, а затем создает простую схему драйвера полевого транзистора. Когда вы ожидаете появления небольшого микроконтроллера, [IMSAI Guy] вместо этого копается глубоко в своем ящике для мусора и объясняет, как управлять двигателем с помощью 22V10 GAL (электрически стираемого PAL) и модуля таймера 555.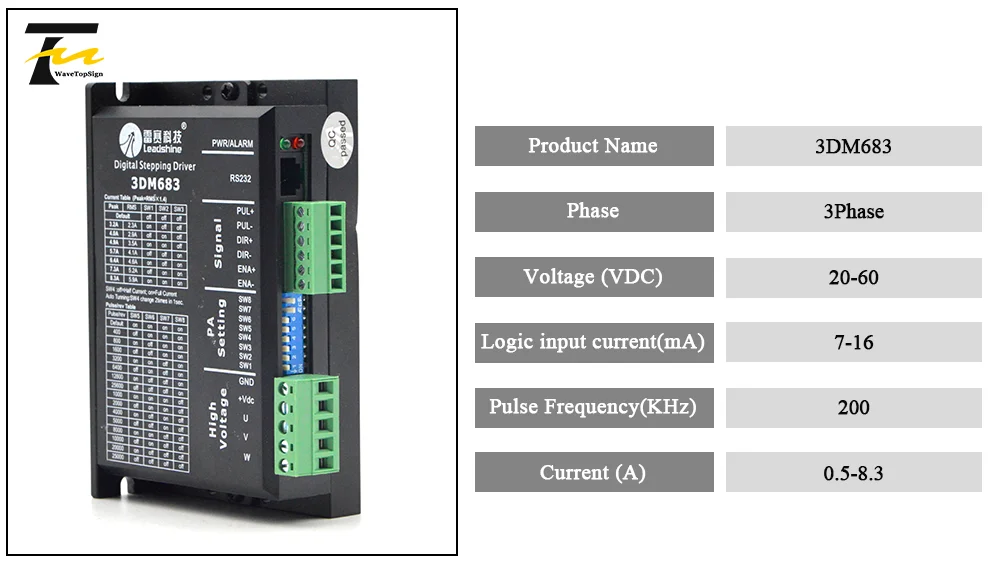 Основываясь на четко объясненной логической таблице для управления катушками, хитрому способе представления карт Карно, он приступает к написанию выходных уравнений в WinCUPL.
Основываясь на четко объясненной логической таблице для управления катушками, хитрому способе представления карт Карно, он приступает к написанию выходных уравнений в WinCUPL.
WinCUPL – это современная версия CUPL (компилятора для универсальной программируемой логики), изначально написанная компанией Assisted Technology, ныне принадлежащей Altium. CUPL и его коллеги, такие как PALASM от Monolithic Memories, Inc. (MMI) и ABEL от Data I / O Corporation, были базовыми языками описания оборудования, специально разработанными для PAL, GAL и CPLD.PAL были небольшими массивами логических вентилей с плавкими соединениями, и ваша конструкция «выжжена» на предохранителях так же, как (EE) PROM. При проектировании с помощью PAL вы могли ясно визуализировать в уме связи, что с тех пор было исправлено с появлением современных FPGA.
Увы, он вырезает ту часть, где компилируется исходный код и программируется 22V10, и сразу переходит к тестированию схемы на макетной плате. Предупреждение о спойлере – это действительно работает. Изящный макетный модуль таймера 555, на который он указывает, называется TP353, который вы можете найти у своего любимого онлайн-поставщика.
Предупреждение о спойлере – это действительно работает. Изящный макетный модуль таймера 555, на который он указывает, называется TP353, который вы можете найти у своего любимого онлайн-поставщика.
В этом руководстве есть чему поучиться, и [IMSAI Guy] отлично справляется с тем, чтобы сделать предмет доступным для любителей и новичков. Пару недель назад мы также рассмотрели еще один из его уроков по датчикам изображения. Спасибо [itsevilbert] за подсказку.
Читать далее «Шаговые двигатели – быстро и просто» →
DIY Stepper Controller – Введение | PyroElectro
Информация о проектеАвтор: Крис
Сложность: Средняя
Затраченное время: 3 часа
Предпосылки:
Взгляните на вышеупомянутый
уроки перед продолжением
прочитать этот учебник.

Шаговый двигатель – это очень точный и простой в использовании двигатель, который отлично подходит как для начинающих, так и для начинающих. продвинутые любители. Точность, которую обеспечивают шаговые двигатели за счет уникального «шагового» метода движения, позволяет нам всегда знать, где находится двигатель, без какой-либо обратной связи или схема кодирования.
Понимание того, как построить правильную схему управления для шагового двигателя, имеет жизненно важное значение.Зная, сколько тока будет потребляться двигателем, и запланированное напряжение системы имеет важное значение. На протяжении всего этого руководства напряжение моей системы будет составлять 12 В для двигателей, а потребляемый ток не будет. превышают 300 мА. Шаговые двигатели могут потреблять большой ток, поэтому проверьте спецификации того, что вы используете.
Демонстрационная установка
Цель и обзор этого проекта
Целью этого проекта является создание платы, специально предназначенной для управления шаговым двигателем с двумя катушками.Доска должен иметь 4 порта клеммной колодки для 4 проводов шагового двигателя и 4 входных порта для контроллера L297.
Плата должна надежно контролировать шаги, которые выполняет двигатель. Каждый тактовый импульс в цепи выполнит ровно 1 тактный цикл двигателя.
TB6600 Драйвер шагового двигателя arduino
Что такое шаговый двигатель?Шаговый двигатель – это бесщеточный электродвигатель постоянного тока, который делит полный оборот на ряд равных шагов. Затем на одном из этих шагов можно указать положение двигателя для перемещения и удержания.

Как управлять шаговым двигателем?
Самый быстрый способ управлять шаговым двигателем – это просто использовать драйвер (контроллер) шагового двигателя. И TB6600 arduino – именно то, что вам нужно.
TB6600 arduino – это простой в использовании профессиональный драйвер шагового двигателя, который может управлять двухфазным шаговым двигателем. Он совместим с Arduino и другими микроконтроллерами, которые могут выводить цифровой импульсный сигнал 5 В. Драйвер шагового двигателя TB6600 arduino имеет широкий диапазон входной мощности, источник питания 9 ~ 42 В постоянного тока.И он способен выдавать пиковый ток 4А, чего достаточно для большинства шаговых двигателей.
Драйвер шагового двигателя поддерживает управление скоростью и направлением. Вы можете установить микрошаг и выходной ток с помощью 6 DIP-переключателей. Существует 7 видов микрошагов (1, 2 / A, 2 / B, 4, 8, 16, 32) и 8 видов контроля тока (0,5 А, 1 А, 1,5 А, 2 А, 2,5 А, 2,8 А, 3,0 А). А, 3,5 А) всего. И все сигнальные терминалы имеют изоляцию высокоскоростной оптопары, что увеличивает ее способность противостоять высокочастотным помехам.
И все сигнальные терминалы имеют изоляцию высокоскоростной оптопары, что увеличивает ее способность противостоять высокочастотным помехам.
Как профессиональное устройство, оно может приводить в движение двухфазный четырехфазный гибридный шаговый двигатель типа 57, 42.
Примечание: это новейшая обновленная версия драйвера шагового двигателя TB6600.
Сигнализация DIY с использованием Home Assistant, Konnected и Sonoff RF Bridge
TB6600 Драйвер шагового двигателя 5A и Arduino
 5-4.0A
5-4.0AHNTE – Драйверы для двигателей своими руками
Драйверы шагового двигателя
Управлять шаговым двигателем, к сожалению, не так просто, как двигателем постоянного тока, биполярные двигатели Я использовал две обмотки, которые вы включаете в определенном порядке, чтобы двигатель вращался. шаг.Однако программное обеспечение ЧПУ отправляет только два сигнала, шаг и направление, поэтому для взаимодействия Шаговые двигатели с параллельным портом нужно сделать несколько драйверов. Версия 1 моих драйверов Я решил спроектировать и заставить себя, в основном, чтобы практиковать свои навыки производства печатных плат, я бы рекомендую делать свои собственные доски только в том случае, если вы действительно хотите получить полный опыт домашнего изготовления, потому что они не работают так хорошо, как купленные драйверы и в итоге даже не оказались дешевле (хотя и хороший опыт).
После долгих исследований выяснилось, что самые простые микросхемы драйверов для биполярных шаговых двигателей – это L297 и L298N, они позволяют управлять шаговыми двигателями до 36 В 2 А на обмотку и допускают полушаговый что удвоит ваше разрешение. Схема даже хорошо представлена в техническом описании L298N, вы можете соединить несколько плат вместе, чтобы использовать один и тот же источник синхронизации, что предназначено для обеспечения что каждая доска работает с одинаковой скоростью (это, похоже, не сработало для меня, я виню шум из-за мой хитроумный производитель печатных плат).Схема ниже прямо из таблицы данных L298N, к сожалению. Я потерял файлы печатной платы орла для этих плат, когда взорвал свой ноутбук во время моего проекта Fuzzy Urn. (Больше делать не планирую).
На фото выше вы видите большие радиаторы и вентиляторы, это может показаться излишним, но эти Микросхемы l298N действительно сильно нагреваются при 24 В в течение длительного времени, эти драйверы также издавал громкий пронзительный вой из шагового двигателя, когда двигатель оставался неподвижным.
Плата параллельного порта
Поскольку эти драйверы могут работать при довольно высоких напряжениях и токах, рекомендуется изолировать их от параллельного порта ПК, нет смысла убивать ваш компьютер, если что-то пойдет не так. Для изоляции я решил использовать очень простой оптоизолирующий чип на каждой линии ввода / вывода, я использовал 4N25. оптоизолятор в конфигурации по умолчанию прямо из таблицы данных, я сделал краткую схему одна входная линия, R1 – токоограничивающий резистор, а R2 – понижающий резистор, поэтому выберите значения соответственно.При подключении штекера параллельного порта убедитесь, что вы используете правильные выходные контакты, я использовал контакты 2-9, поскольку они подключены к линии передачи данных параллельных портов и не инвертируют, просто погуглите распиновка для получения дополнительной информации.
Схема прорыва
Блок питания
Для основного питания шаговых двигателей я купил импульсный блок питания 24 В на сайте http: // ausxmods. com.au/ Я выбрал импульсные блоки питания, так как они могут обеспечивать высокий ток, имеют защиту от перегрузки по току и напряжению. встроенные, и на самом деле они кажутся дешевле, чем покупка трансформатора и сборка блока питания самостоятельно. я вообще-то Не помню почему, но я также построил плату регулятора высокого тока 24-12 В, она фактически используется только сейчас для вентилятор и блок питания для моей новой коммутационной платы, схема включает стандартный линейный регулятор 12 В и два сильноточных транзистора, схема которых показана ниже.Возможно, вам понадобятся радиаторы на обоих регулятор и транзисторы, особенно если вы получаете 10А от этой штуки, просто убедитесь, что вы НЕ закоротите выступы радиатора между регулятором и транзисторами, вы что-нибудь сломаете, вкладка регуляторов подключен к земле, а выводы транзисторов подключены к коллектору или 12 В (угадайте, как я это понял).
com.au/ Я выбрал импульсные блоки питания, так как они могут обеспечивать высокий ток, имеют защиту от перегрузки по току и напряжению. встроенные, и на самом деле они кажутся дешевле, чем покупка трансформатора и сборка блока питания самостоятельно. я вообще-то Не помню почему, но я также построил плату регулятора высокого тока 24-12 В, она фактически используется только сейчас для вентилятор и блок питания для моей новой коммутационной платы, схема включает стандартный линейный регулятор 12 В и два сильноточных транзистора, схема которых показана ниже.Возможно, вам понадобятся радиаторы на обоих регулятор и транзисторы, особенно если вы получаете 10А от этой штуки, просто убедитесь, что вы НЕ закоротите выступы радиатора между регулятором и транзисторами, вы что-нибудь сломаете, вкладка регуляторов подключен к земле, а выводы транзисторов подключены к коллектору или 12 В (угадайте, как я это понял).
Вы можете увидеть мою полную плату питания на фотографии выше, чтобы я мог включать / выключать маршрутизатор. У меня есть реле + транзистор. управляемый сетевой штекер на левой стороне платы, он подключается через коммутационную плату вместе с драйверами двигателя, на сетевом входе также есть кнопка аварийного останова на всякий случай.
У меня есть реле + транзистор. управляемый сетевой штекер на левой стороне платы, он подключается через коммутационную плату вместе с драйверами двигателя, на сетевом входе также есть кнопка аварийного останова на всякий случай.
Плата питания
Регулятор 12В 10А
3A Драйвер униполярного шагового двигателя
Этот крошечный униполярный драйвер шагового двигателя был разработан на основе микросхемы SLA7078MPR от Sanken. Это униполярный драйвер шагового двигателя, который может выдерживать ток до 3 А и имеет микрошаговый шаг до 1/16 шага. Имеются встроенные перемычки для установки микрошага и предустановки (потенциометр) для установки тока.
Микросхемы драйверов двигателей серии SLA7078MPR содержат униполярные драйверы. Входной интерфейс синхронизирующего типа позволяет упростить логику управления, а опции для встроенного детектора тока и защиты от короткого замыкания или размыкания цепи нагрузки (патент заявлен) обеспечивают более низкие потери и меньшее тепловое сопротивление.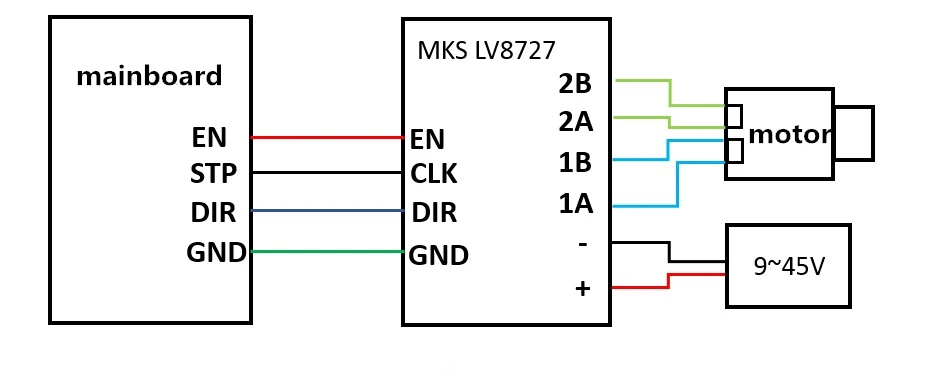
Встроенная схема распределения возбуждения (секвенсор) позволяет управлять двигателем, используя только сигнал ЧАСОВ для простых операций (вращение / остановка), с управлением скоростью двигателя посредством ввода частоты на вывод ЧАСОВ.Это устраняет необходимость в линиях логических сигналов для традиционных методов ввода фазы и снижает нагрузку на часто используемые ЦП.
Униполярная шаговая плата– это высокоэффективный шаговый драйвер для униполярного шагового двигателя, который был разработан для различных приложений, таких как робототехника, управляющие маршрутизаторы, токарные станки, фрезерные станки, сверлильные станки для печатных плат и граверы.
Эта плата была разработана для использования в двух направлениях: в автономном режиме и в интерфейсе микроконтроллера или в автоматическом режиме половинного тока.
Автономный
Для вращения двигателя требуются обычно ниже входы:
- Частота импульса (шаг входного импульса)
- Направление
- 5 В постоянного тока
- GND
- SYNC и REF не требуются для этой операции.

Интерфейс микроконтроллера или автоматический полупоток
Для интерфейса микроконтроллера или автоматической полутока (когда двигатель находится в состоянии удержания):
Обычно драйвер шагового двигателя в приложении управления движением и ЧПУ требует автоматической функции половинного тока, особенно когда двигатель не движется и находится в состоянии блокировки. Для этой операции SYNC и Ref требуется входной сигнал.
- Вход SYNC предназначен для прерывания синхронной функции для защиты от ненормальных шумов, которые могут иногда возникать во время остановки двигателя.Этой функцией можно управлять, установив вывод SYNC на высокий уровень.
- Ref / Sleep1 – Чтобы установить половину тока в состоянии удержания двигателя, этот вывод требует соответствующего входного напряжения. Также этот вывод можно использовать для перехода драйвера в спящий режим, просто применив к нему высокий уровень.
Примечание: Чтобы установить половинный ток, прочтите техническое описание SLA7078MPR.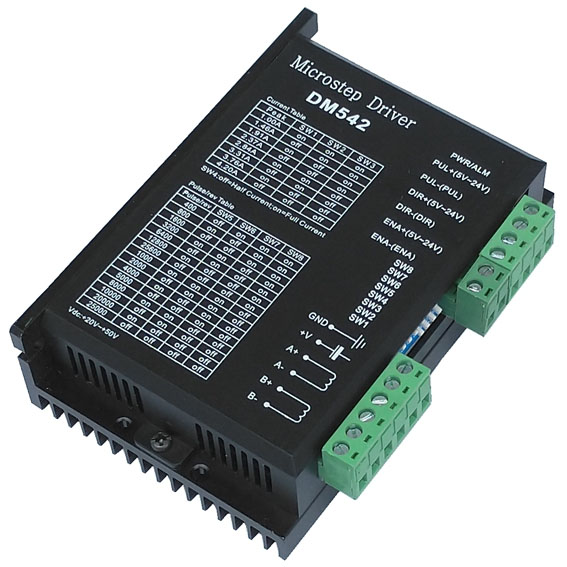
Технические характеристики
- 10-контактный разъем для сигнальных входов, Step, Dir., 5V, Sync, V Ref./Sleep
- опорного напряжения VS Выходной ток: 0.От 1 В до 0,45 В, 0-3 А
- Микрошаговое переключение через встроенную перемычку
- Возможен микрошаг: полный шаг, половинный шаг, 1/4 шага, 1/8 шага 1/16 шага
- Встроенная предустановка для текущей регулировки
- Вход питания и шаговое подключение через винтовой зажим
- Встроенная защита от сбоев в микросхеме от перегрева и короткого замыкания
- Источник питания 12-42 В постоянного тока при 3 А
- Для нормальной работы, V Ref. должно быть меньше 1,5 В. При приложении напряжения больше 2.0 В (высокий уровень) на вывод VREF отключает привод и переводит двигатель в свободное состояние (выбег)
Схема
Список деталей
Подключение
Конфигурация
Фото
Видео