
По информации издания Bimmertoday.de, исключением станут BMW X3 и X4, построенные в Спартанбурге – их не будут переоснащать до начала производства в августе 2018 г. Фильтр для твердых частиц бензина Otto гарантирует, что все варианты двигателей BMW B38, B48, B58 и N74 смогут работать в допустимых пределах согласно требований нового цикла WLTP, а также в реальных условиях измерения выбросов (RDE).
Фильтр OPF предотвращает излишне высокий уровень содержания твердых частиц в выхлопных газах выбрасываемых двигателем в окружающую среду. Технически фильтр частиц Otto работает так же, как фильтр твердых частиц дизельного топлива, который использовался в течение многих лет: фильтры встроены в выхлопную систему и собирают мельчайшие частицы, которые образуются во время сгорания топлива.
Напомним, что весной 2018 г. BMW Group переработал все свои дизельные двигатели, чтобы полностью удовлетворить высокие требования WLTP и RDE. В дополнение к обычным элементам очистки выхлопных газов, сажевым фильтрам и хранилищам NOx, все дизельные двигатели оснащены AdBlue injection и SCR-катализатором.
У BMW Club есть страницы в Facebook и в Instagram! Присоединяйтесь, друзья!
Источник: www.bmwclub.ru
Фото: Bimmertoday.de
При использовании материалов ссылка на источник обязательна
Power Electronics • Просмотр темы
Murlo писал(а):
1. Предназначен для измерения и учета активной энергии.
2. Учет ведется как по фазным так и по “0” вводам, причем по тем, где ток больше.
Счётчик считает только активную энергию. То что учёт ведётся по обоим провода означает лишь, что ток контролируется как в 0-вом, так и в фазном проводе. Это сделано для предотвращения существующей практики отмотки счётчиков. На деле, скорей всего, счётчик щёлкает только в одну сторону (в отличие от традиционных) и поэтому просто не различает генераторной и нагрузочной стороны. Т.е. АКТИВНАЯ энергия считается в обоих направлениях. Но РЕАКТИВНАЯ энергия при этом всё равно не учитывается. Murlo писал(а):
извиняюсь, опечатался: 655/675=0.97
Должно получиться гораздо меньше. Скажем в пределах 0,6-0,8. Возможно какая-то ошибка вкралась при снятии показаний счётчика.
Murlo писал(а):
на счетчике 1квт/час 1600 имп. (каждые 8 импульсов счетчик делает щелчок, поэтому для удобства считал 480 а не 500 импульсов).
Подробнее можно описать, что подразумевается под щелчками и что под импульсами? И откуда взялись 480 импульсов, если их 1600?
Судя по информации в инете существует несколько версий этого счётчика. Конкретный счётчик имеет механический счётный механизм?
Документация
Что касается типов фильтра, то лучшее подавление высших гармоник, при сохранении основной, может обеспечить только фильтр Отто. Высшие же гармоники не совершают полезной работы, но разогревают провод и железо двигателя, сильно снижая его полезный рабочий ресурс. Кроме этого,
Murlo, вы уже потратили достаточно времени на испытание двигателя. Логичнее этот процесс довести до завершения и построить фильтр Отто, чем удариться в метания и не довести дело до конца.
_________________
“Древние украли все наши лучшие идеи”- Марк Твен
В заводских условиях большинство расходования тока идет на приводы, оснастки, насосов, вентиляторов, компрессоров, грузоподъемных блоков. Это оборудование запускается в работу двигателями, уменьшения расхода выходного напряжения. Крупные изготовители мира электротехники делают конструкции, которые преобразовывают частоту. Частотные преобразователи полезные электронные устройства, которые облегчают моменты запуска и эксплуатации двигателей. Преобразователи частоты влияют на мотор.
Конструкция преобразователя частоты имеет свои особенности. Напряжение на выходе и ток показывают несинусоидальный вид искажают его, имеют много помех, гармонических значений. Выпрямитель преобразователя частоты выходного напряжения, которые не управляется, расходует ток, подает в сеть питания высшие гармоники.
Инвертор преобразователя частоты образует спектр высоких гармоник с частотой от 150 килогерц до30 мегагерц. Работа обмоток двигателя с искажением тока несинусоидального вида дает образование отрицательных реакций, как пробой электрического выходного напряжения, тепловой пробой изоляционного материала обмоток двигателя, повышения износа изоляции, акустического шума двигателя.
Частотные преобразователи издают помехи в питающей сети, оказывают отрицательное влияние на электрооборудование этой сети. Чтобы ослабить это воздействие на двигатель, используют фильтры разного вида.
Фильтры делят на выходные и входные. Фильтры на входе играют роль подавления отрицательного влияния выпрямителя и инвертора, предназначены удалять помехи, которые создаются частотником и помехами снаружи. Входные фильтры – это дроссели сети, фильтры. Выходные фильтры: фильтры синфазных помех, двигательные дроссели, синус фильтры.
Дроссели в сети
Дроссель сети – это буфер с двумя сторонами между сетью снабжения энергией и преобразователем, делает защиту сети с частотой 250 герц, 350 герц, 550 герц. Моторные дроссели сети делают защиту инвертора от увеличенного напряжения сети и тока при переходе в сети и нагрузке преобразователя, при сильном перепаде напряжения сети, возникающего во время отключения двигателей большой мощности.
Дроссели в сети с определенным падением выходного напряжения служат для применения частотного преобразователя, который не делает регенерацию электрической энергии, освобождается при замедлении двигателя в систему питания. Дроссели сети с определенным напряжением на обмотках 4% служат для работы нескольких инверторов и автоматических трансформаторов с опцией восстановления энергии замедления двигателя в питании системы.
Дроссели сети применяют в случаях:
- Наличие помех в сети механизмов.
- Асимметрия потенциала фаз выше 1,8% от номинала.
- Частотник соединен с сетью малого сопротивления.
- Много инверторов подключено на одну линию.
- В сети есть нелинейные элементы с искажениями.
- В схеме есть конденсаторная батарея, которая увеличивает мощность сети.
Достоинства использования сетевых дросселей:
Фильтры ЭМИ
Корпус частотного преобразователя с двигателем – нагруженность величины к сети питания. Вместе с индуктивностью силовых кабелей возникают флуктуации частоты тока и потенциала, питания. Это негативно сказывается на эксплуатации разных видов. Фильтры нужны для создания совместимости преобразователя частоты с помехами.
Фильтры с тремя фазами снижают кондуктивные помехи в интервале частот от 150 килогерц до 30 мегагерц. Паразитные токи проходят по фильтру, и не выходят за границы. Устройства попадают под защиту от помех инвертора. Фильтр ЭМИ ставится поближе к входу преобразователя частоты. Иногда его встраивают в корпус частотника. Величина излучений волн зависит от кабелей питания. При установке преобразователя частоты нужно следовать рекомендациям производителя.
Конструктивные особенности и сфера фильтров
Фильтры dU/dt для низких частот, которые состоят из емкостей и дросселей. Индуктивности дросселей и емкостей обеспечивают снижение частот больше коммутации силовых значений преобразователя. Размер индуктивности катушки дросселя dU/dt колеблется до сотен микрогенри, величина емкости dU/dt равна нескольким десяткам нанофарад. С фильтром dU/dt снижается максимальное напряжение на контактах двигателя до 500 вольт/мкс, защищает обмотку мотора от пробоя током.
Фильтрующие элементы dU/dt ставятся ситуациях:
- Прибор с управлением частоты производит рекуперативное замедление.
- Механизм не приспособлен для преобразователя частоты.
- Механизм со старым мотором, малой степенью изоляции, с мотором простого назначения, нестандартный.
- Короткий кабель двигателя, менее 15 м.
- Электромотор смонтирован в агрессивной обстановке или повышенных температурах.
- На электродвигателях общего назначения с напряжением 690 вольт.
Фильтр оснащен небольшими данными емкости и индуктивности, потенциал на обмотках мотора представляет импульсы прямоугольной двухполярной формы, синус на графике отсутствует. Ток мотора имеет форму синусоиды. Фильтры применяются на коммутации частоты менее номинала, надо уходить от применения на коммутационной частоты более номинала, фильтр будет перегреваться. Фильтр называется дросселем мотора. Конструктивной особенностью дросселей моторов является отсутствие емкостей. Обмотки несут большую индуктивность.
Механизм синус-фильтров подобен фильтру dU/dt. Отличие в том, что есть моторные дроссели и емкости с номиналом выше, фильтр LC имеет резонанс меньше 50% от коммутационной частоты. Получается эффект подавления частот высоких и форма синус-фильтра в интервале от сотен микрогенри до десятков микрогенри, величина емкости синус-фильтра от микрофарад до сотен микрофарад. Габариты синус-фильтра большие, как самого частотника.
При использовании синус-фильтров не нужно применять моторы с изоляцией усиленной. Происходит снижение акустического шума от двигателя.
Наибольшая кабельная длина между инвертором и фильтром:
- До мощности 7,5 киловатт – 2 м.
- От мощности 7,5 до 90 киловатт – 5-10 м.
- Выше 90 киловатт – 10-15 метров.
Конструктивные особенности и сфера использования фильтров помех
Фильтр помех – трансформатор с наконечником из феррита, обмотки это фазные провода кабеля. Фильтр снижает токи в моторном подшипнике, снижает излучения от кабеля мотора. 3 фазы идут в кольце. В этом же кольце идет и заземление.
Кольца из феррита ставятся на проводах двигателя. При нормальной работе температура колец не будет выше 70 градусов. В качестве длины кабеля двигателя — кабель с жилами формы сектора. Нам нужны только кабели с проводами формы круга.
При нескольких кабелях учитывается вся длина. Если двигателей много, на всех ставится комплект колец. Вибрация колец приводит к износу кольца, из-за постоянного трения. Кабель фиксируют специальными хомутами.
Выбор значений элементов синус-фильтра
Чтобы определить величину емкости и индуктивности фильтра надо провести расчет на наибольшей и наименьшей частотах:
- Рассчитываем коэффициент гармонический напряжения на входе для нормальных параметров.
- Подобие при коэффициентах гармоник выходного и входного напряжений.
- Коэффициент передавания фильтра на 1-й гармонике активной нагруженности.
- Интервал напряжения выходного фильтра.
По сопротивлению нагруженности, всей мощности ищут индуктивность и емкость фильтра. Из 2-х режимов выбирают максимальные напряжения выхода на всем интервале регулировки частоты. Далее, выбираем индуктивность и емкость фильтра, контролируем коэффициент гармоник потенциала выхода. Рассчитываем частоту резонанса фильтра. Расчеты делаются на компьютере в Mathcad.
Фильтры синуса на практике
Фильтры синусные поместятся в шкафу. Индуктивность выполняют дросселем на магнитном проводе. Применение реактора в воздухе в шкафу выгоднее, чем с магнитопроводом.
По методике сконструирован фильтр синусный для эксплуатации вместе с интервалом регулировки частоты выхода и с основной частотой инвертора, напряжение 3 кГц при нужном коэффициенте гармоник напряжения выхода не более 5% на интервале регулировки зависимости момента от частоты.
Фильтр-синус BLOCK
Это прибор из емкостей, дросселя, образующих цепочку с частотой резонанса менее, чем у инвертора. Создается хорошее сглаживание синуса тока, снижаются частоты.
С фильтрами BLOCK не нужна специальная изоляция, шумы от мотора и подшипников уменьшаются, снижается нагрев обмоток мотора, можно применять длинные кабели до 500 метров. Фирма BLOCK производит синусные фильтры до 250 киловатт, интервал частот до 150 герц.
Моторные дроссели и фильтры фирмы Skybergtech
Фирма в Чехии Skybergtech производит множество фильтров для инверторов и моторов. Она представляет фильтры А-класса и В-класса в интервале от 150 килогерц до 30 мегагерц с помехоподавлением. Имеются 1-фазные и 3-фазные варианты током от 3 до 2500 ампер на напряжение 12 вольт – 25 киловольт. Для особых случаев есть фильтры до 80 децибел от 0,01 до 1000 мегагерц.
Помехоподавительные фильтры представляются в изделиях фирмы Skybergtech 1-фазной серии SKY1FL и 3-фазной серии SKY3FL. Вид снаружи и характеристика частоты фильтров:
Для эксплуатации с несимметричной нагруженностью компания сделала фильтры SKY4FL. У них 4 катушки расположены на основном сердечнике и дают хорошее подавление помех при сильлной разбалансировке нагрузочных фаз. Подсоединяется фильтр по 5-проводной схеме и дает помехоподавление от 30 децибел в интервале от 150 килогерц до 30 мегагерц. Вид снаружи и схема фильтра SKY4FL1600C:
Фильтры подавления помех применяются не только для частотников, но и для различных устройств, регуляторов. 1-фазными и 3-фазными дросселями фирма предлагает марки SKY3TLT и SKYTLT. Они не имеют корпуса, вид индуктивной катушки, провод которой намотан на сердечнике Ш-образном.
Дроссели на постоянный ток фирма выставила также свою серию приборов. Инженеры имеют опыт применения магнитных материалов, делают дроссели для постоянного тока, с малыми габаритами и весом.
Для моторов фирма предлагает отдельную серию, у которой потери всего 2%. В нее входят 3-фазные на 230-400 вольт, 3-800 ампер. У малой длины кабеля и малой частоте прибора моторным дросселем берут фильтр du/dt. Фирма представила марку отдельную на 1200 ампер, 690 вольт. Ее можно применять с частотниками и с преобразователями напряжения, на основе разработок новейших технологий в сфере электротехники для производств.
LC – фильтры я оставил на десерт, подобно бутылке благородного вина, покрытой слоем вековой пыли. Это антиквариат, который на Сотбисе не купишь!
Как ни крути, а не получил бы Александр Степаныч наш Попов звание почётного инженера-электрика, не направь он искровой разряд
напрямик в колебательный контур для обретения благословения свыше и резонанса с передающей антенной.
И начнём мы с расчёта самого простого LC-фильтра – колебательного контура.

Включённый по приведённой на рис.1 схеме, он представляет собой узкополосный полосовой фильтр, настроенный на частоту
fо= 1/2π√LС.
На резонансной частоте сопротивление контура равно:
Rо = pQ, где р – характеристическое сопротивление, равное реактивному сопротивлению катушки и конденсатора.
Оно в свою очередь рассчитывается по формуле р = √L/C.
Рис.1
На низких (звуковых) частотах конденсаторы практически не вносят потерь, поэтому добротность контура равна добротности катушки
индуктивности, величина которой напрямую зависит от активного сопротивления катушки. Чем ниже частота, тем больше витков и тоньше
провод, тем проще его измерить тестером. Если эта попытка удалась, то Q=2πfL/R, где R – активное сопротивление катушки индуктивности.
На радиочастотах значение активного сопротивления катушки может составлять доли ома, поэтому для расчёта добротности надо – либо
найти сопротивление в Омах по формуле R= 4ρ*L/(πd²), где ρ — удельное сопротивление меди, равное 0,017 Ом•мм²/м, L – длина в
метрах, d – диаметр провода в мм, либо вооружиться генератором сигналов, каким-либо измерителем уровня выходного сигнала с высоким
внутренним сопротивлением, и определить добротность экспериментально.
К тому же на высоких частотах возможно проявление влияния добротности конденсатора, особенно если он окажется варикапом, хотя
современные недорогие керамические изделия (например, фирмы Murata) имеют значение параметра добротности – не менее 800.
Нарисуем табличку с расчётом фильтра для низкочастотных приложений.
ТАБЛИЦА ДЛЯ LC- РЕЗОНАНСНОГО (ПОЛОСОВОГО) ФИЛЬТРА ДЛЯ НЧ.
Если параметр активного сопротивления катушки R опущен, его значение принимается равным 200 омам.
Необходимо отметить, что все полученные в таблице данные верны и для последовательного колебательного контура.
При этом, если мы хотим использовать свойства контура полностью, т. е. получить острую резонансную кривую, соответствующую
конструктивной добротности, то параллельный контур надо нагружать слабо, выбирая R1 и Rн намного больше Rо (на практике
десятки кОм), для последовательного же контура, сопротивление генератора R1 наоборот должно быть на порядок меньше
характеристического сопротивления ρ.
Теперь, нарисуем таблицу для расчёта высокочастотных резонансных контуров.
Тут на добротность влияет не только активное сопротивление катушек, но и другие факторы, такие как – потери в ферритах, наличие экрана,
эффект близости витков и т. д.
Поэтому вводить этот параметр в качестве входного я не
стану – будем считать, что добротность катушки вы измерили, или подсмотрели в документации на готовые катушки. Естественным образом
значение добротности катушки должно измеряться на резонансной частоте контура, ввиду прямой зависимости этой величины от рабочей
частоты (Q=2πfL/R).
К тому же я добавлю сюда
параметр добротности конденсатора, особенно актуальный в случае применения варикапов.
По умолчанию (для желающих оставить эти параметры без внимания), добротность катушки примем равной 100, конденсатора – 1000, а для
испытывающих стремление измерить эти параметры в радиолюбительских условиях, рекомендую посетить страницу
ссылка на страницу .
ТАБЛИЦА ДЛЯ LC- РЕЗОНАНСНОГО (ПОЛОСОВОГО) ФИЛЬТРА ДЛЯ ВЧ.
Теперь плавно переходим к LC фильтрам верхних и нижних частот (ФВЧ и ФНЧ).

Рис.2
Крутизна спада АЧХ этих фильтров в полосе подавления – 12 дБ/октаву, коэффициент передачи в полосе пропускания К=1 при R1
Однако наилучшие параметры, с точки зрения равномерности АЧХ и передачи максимальной мощности в нагрузку, обеспечиваются
при R1=Rн=ρ. В этом случае фильтр является согласованным, правда коэффициент передачи в полосе пропускания становится равным К=0.5.
Ну да ладно, ближе к делу.
ТАБЛИЦА LC- ФИЛЬТРОВ ВЕРХНИХ и НИЖНИХ ЧАСТОТ.
А если надо рассчитать L и C при известных значениях Fср и ρ ? Не вопрос,
ТАБЛИЦА РАСЧЁТА ЭЛЕМЕНТОВ LC- ФИЛЬТРОВ ВЕРХНИХ и НИЖНИХ ЧАСТОТ.
Данные ФВЧ и ФНЧ называются Г-образными.
Для получения более крутых скатов АЧХ используют два или более Г-образных звеньев, соединяя их последовательно,
чтобы образовать Т-образное звено (на Рис.3 сверху), или П-образное звено (на Рис.3 снизу).
При этом получаются ФНЧ третьего порядка. Обычно, ввиду меньшего количества катушек, предпочитают П-образные звенья.
Рис.3
ФВЧ конструируют подобным же образом, лишь катушки заменяются конденсаторами, а конденсаторы – катушками.
Широкополосные полосовые LC – фильтры получают каскадным соединением ФНЧ и ФВЧ.
Что касается многозвенных LC-фильтров высоких порядков, то более грамотным решением (по сравнению с последовательным соединением фильтров низших порядков) будет построение подобных устройств с использованием полиномов товарищей Чебышева или Баттерворта.
Именно такие фильтры 3-го, 5-го и 7-го порядков мы и рассмотрим на следующей странице.


Дата публикации: .
В этой статье описывается универсальный трехфазный преобразователь частоты на микроконтроллере(МК) ATmega 88/168/328P. ATmega берет на себя полный контроль над элементами управления, ЖК-дисплеем и генерацией трех фаз. Предполагалось, что проект будет работать на готовых платах, таких как Arduino 2009 или Uno, но это не было реализовано. В отличие от других решений, синусоида не вычисляется здесь, а выводится из таблицы. Это экономит ресурсы, объем памяти и позволяет МК обрабатывать и отслеживать все элементы управления. Расчеты с плавающей точкой в программе не производятся.
Частота и амплитуда выходных сигналов настраиваются с помощью 3 кнопок и могут быть сохранены в EEPROM памяти МК. Аналогичным образом обеспечивается внешнее управление через 2 аналоговых входа. Направление вращения двигателя определяется перемычкой или переключателем.
Регулируемая характеристика V/f позволяет адаптироваться ко многим моторам и другим потребителям. Также был задействован интегрированный ПИД-регулятор для аналоговых входов, параметры ПИД-регулятора могут быть сохранены в EEPROM. Время паузы между переключениями ключей (Dead-Time) можно изменить и сохранить.
- Введение
- Программное обеспечение, работа и компиляция
- Генерация синуса
- Скалярное(Вольт-частотное) управление (V/f)
- Схема устройства
- Выводы
В целом, программное обеспечение основано на документации Atmel AVR447, но было значительно изменено для использования описанного здесь контроллера. Аналогично, используется ЖК-библиотека Питера Флери, большое спасибо за это красивое программное обеспечение. К сожалению, программа не совсем вписывается в ATmega48 в текущем состоянии, но может работать с небольшой оптимизацией в строковых функциях. Чтобы избежать каких-либо вопросов – нет, код не работает в (устаревшей) ATMega8. Этот МК не имеет такого функционала таймеров и прерываний.
Характеристики:
Диапазон частот: 0,6 – 162 Гц;
Выходное напряжение: 0 – 325 В постоянного тока, максимально существующее напряжение промежуточной цепи;
Формы выходного сигнала: двугорбая синусоида или синус, выбираемые перед компиляцией.
Введение
Устройство оснащено стандартным ЖК-дисплеем HD44780 работающим в 4-битном режиме и тремя простыми (цифровыми) кнопками. При включении питания MК проверяет наличие перемычки, а затем переключается на внутренний или внешний режим управления. Печатная плата управления гальванически изолирована от выходного каскада двигателя. Для этой цели используются шесть оптронов HCPL3120. Эти оптроны обеспечивают сигналы управления для классического полумостового драйвера IR2110/2113, которые, в свою очередь, приводят в действие мощные ключи на MOSFET/IGBT. Данный выходной каскад следует понимать только как пример, конечно, другие конфигурации вполне возможны.
Используются три таймера ATmega и синхронизация OC (Output Compare) всех таймеров. Один из таймеров (Таймер 1) обеспечивает прерывание переполнения, которое используется для установки ступенчатой cкорости генерации синусоиды и для синхронной записи новых значения ШИМ во все таймеры. Исходный код также содержит подробные комментарии. Скорость шага прямо пропорциональна генерируемой частоте и задается пользователем. Подробнее об этом можно найти в разделе «Генерация синуса».
Для удобства пользователя МК вычисляет частоту в Герцах и отображает ее на дисплее. Аналогично, амплитуда выходного сигнала вычисляется по длительности импульса сигналов ШИМ и показана на дисплее в процентах от напряжения промежуточного контура. Поскольку трехфазные двигатели обычно управляются с характеристикой V/f, это также вычисляется до переполнения таймеров.
Вот фотографии прототипа. Управляющая часть была собрана на макетной плате 2,54 мм, силовая часть на макетной плате с шагом 5,08 мм. МК находится под ЖК-дисплеем. Справа изображен один из моих трехфазных двигателей. Этот двигатель мощностью 550 ватт и работал с 1969 года в моем насосе. Насос полностью заржавел и вышел из строя, но двигатель все еще прекрасно работает. Он был сделан Стефаном-Верке в Хамельне.
Программное обеспечение, работа и компиляция
Программное обеспечение сконструировано таким образом, что ШИМ генератор полностью работает в прерываниях. Основной цикл программы дополняет пользовательский интерйейс и управление ЖК-дисплеем. Всего есть два режима отображения:
Режим 1 – это нормальное меню, в котором кнопка 1 может использоваться для переключения между настройками V/f и настройкой частоты. Клавиши 2 и 3 уменьшают или увеличивают выбранное значение. Курсор на дисплее ниже редактируемого значения. Функция автоповтора с ускорением упрощает настройку.
Режим 2 – активируется одновременным нажатием кнопок 1 и 2. Это меню используется для установки значений ПИД-регулятора и Dead-Time, начальных значений для V/f и частоты и для их записи в EEPROM. Опять же, клавиша 1 переключается между параметрами, а клавиши 2 и 3 используются для настройки. Одновременное нажатие 1 и 2 сохраняет значения, одновременное нажатие 1 и 3 выходит из режима без сохранения, но сохраняет значения для V/f и частоты, которые в настоящее время установлены в меню режима 1.
При работе с внешним сигналом в режиме 1 отображаются значения, но их нельзя изменить, нажав кнопку. С другой стороны, режим 2 выбирается, а также работает с внешним управлением для настройки значений ПИД и Dead-Time. Прерывание инициируется аналого-цифровым преобразователем. Оно считывает значение АЦП и сохраняет его в глобальных переменных. Конструкция «switch-case» позволяет вам использовать больше каналов АЦП, если это необходимо. DIP-вариант ATMega88/168 не дает этой возможности, здесь используются не все каналы АЦП. Однако в версии QFP еще есть каналы АЦП 6 и 7, они могут использоваться.
Описанная здесь схема позволяет применять как частотные, так и V/f-значения в качестве аналоговых сигналов. Без внешних делителей напряжения на входе ожидается в пределах 0-5 В.
Библиотеку ЖК-дисплея пришлось слегка модифицировать, поскольку здесь используется два разных порта для данных и линий управления. Изменения в lcd.h должны применяться, поскольку аппаратные выходы ШИМ МК не могут быть изменены.
Кстати, за исключением ПИД-регулятора и ЖК-подпрограмм, все части программного обеспечения были объединены в один файл, чтобы дать компилятору наилучшую возможную оптимизацию. В качестве параметра оптимизации “-О” оправдал себя. Перед компиляцией не следует забывать вводить частоту использованного кристалла в Гц в настройках проекта. В Linux файл Makefile должен быть дополнен -DF_CPU 16000000, в AS4 в разделе «Настройки проекта -> Общие». Однако использование поставляемого * .aps в качестве шаблона проекта не требуется. Пакет программного обеспечения содержит все файлы для создания проекта с помощью AVR Studio 4.
Исходный код состоит из следующих файлов:
main.c, pid.c, lcd.c
и заголовочные файлы:
vfd.h, vfdtables.h, pid.h, lcd.h
Особое внимание заслуживает vfd.h. Здесь описаны все определения проекта. Если вы посмотрите main.c, вы найдете много констант, все они будут объявлены в vfd.h. Наиболее часто используемыми переменными являются скорость шага (inco), указатель на таблицу синусов (sinTableIncrement), амплитуду (amplitude) и отношение V/f (VperHz). Эти переменные хранятся непосредственно в регистрах для увеличения рабочей скорости. Вероятно, это было бы необязательно, но в качестве примера, использующего переменные прямого реестра, это может быть полезно и для других проектов. Другая переменная прямого регистра (fastFlags). Эта структура используется поразрядно, но здесь используются только 4 бита. Один бит для переключения между внешним и внутренним управлением, затем 2 бита для используемой формы сигнала (либо «неопределенный», либо «синус»), а затем еще один бит для желаемого направления вращения. Параметры отображения вычисляются с использованием целочисленной математики, так как числа с плавающей точкой следует избегать. Регулярное прерывание таймера вызывает процедуру «SpeedController» (после 200 переполнений таймера). Здесь, во внешнем режиме управления, вызывается ПИД-регулятор и вычисляются параметры отображения. Индикация ЖК-дисплея выполнена с использованием командного интерпретатора.
После сброса сначала инициализируются ЖК-дисплей и порты, и все предварительно назначеные переменные. За этим следует инициализация таймеров, прерываний, АЦП и ПИД-регулятора. После проверяется состояние перемычек и считывается EEPROM. Наконец, разрешается глобальное прерывание и, следовательно, начинается генерация частоты.
Во время процесса диагностические коды выводятся на ЖК-дисплей, чтобы сообщать о любых проблемах с «залипшими» клавишами или другими проблемами. В конце следует основной цикл, в котором запущен «командный интерпретатор» (execCommand).
Командный интерпретатор не делает ничего, кроме как сначала проверяет нажатые клавиши. Если он найдет одну или несколько нажатых клавиш, будет выполнена одна из функций. После этого ЖК-дисплей будет обновлен. Второй уровень команд делает это для расширенного меню, так как он работает одинаково. Все настройки гарантируют, что значения не могут быть «за пределом», так как это часто приводит к фатальным последствиям. Так, например, Невозможно переключить рабочую частоту от 0,1 Гц непосредственно до 162 Гц или установить “Dead-Time” в ноль.
Еще одно замечание по AVR Studio 4, последняя версия 4.19, чтобы избежать ошибок компиляции, вы должны использовать AVR Toolchain 3.3.1 – 1020, иначе вас будут беспокоить ошибки. В качестве альтернативы WinAVR подходит – например, версия 20100110.
Генерация синуса
Значения синусоид для трех фаз (U, V и W) сохранены в массиве, который находится в файле «vfdtables.h». Выходы фаз в настоящее время обозначаются L1, L2 и L3, а также R, S и T. Сгенерированная частота определяется тем, после скольких вызовов в ISR “TIMER1_CAPT” указатель увеличится в таблице. Если «inco», например “1”, указатель в таблице увеличивается после 255 проходов, а следующее значение таблицы загружается в таймеры. Так как таблица имеет длину 192, это приводит к выходной частоте 0,635 Гц, что является следствием частоты повторения ШИМ 31,25 кГц/256 = 8,192 мс * 192. Если «inco» 255, следующее значение таблицы уже загружается после 1/31,25 кГц = 32 мкс, и это приводит к выходной частоте 1/(32мкс * 192) = 162,7 Гц. Направление вращения изменяется путем замены значений для V и W перед загрузкой таймеров. Доступ к таблице и загрузка таймеров ШИМ выполняются в процедуре прерывания переполнения таймера 1. Таким образом, эта процедура представляет собой ядро генерации синуса.
Для работы полумостов требуется использование паузы “Dead-Time”, благодаря чему ни верхний, ни нижний ключи полумоста не могут быть включены одновременно. Без этой паузы происходило бы короткое замыкание, что ни в коем случае нельзя допустить. (Этот случай часто упоминается как «прострел»). Поскольку “Dead-Time” сильно зависит от используемых драйверов, пауза была сделана регулируемой. Процедура InsertDeadband вычисляет требуемое “Dead-Time” для каждого таймера перед записью значений ШИМ.
“Dead-Time” хранится в EEPROM. По соображениям безопасности используется минимальное значение вместо недопустимого, если есть ошибки чтения EEPROM или установлено слишком малое значение. Слишком большое значение “Dead-Time” не вредно, но ограничивает диапазон использования ШИМ и эффективность привода. Разумеется, при первоначальном запуске рекомендуется установить большое значение “Dead-Time”, а затем уменьшить его при соблюдении текущего потребления. Единица “Dead-Time” (DEAD_TIME_HALF), отображаемая на дисплее, представляет собой время одного цикла МК. Полученное “Dead-Time” на полумосте в два раза выше, чем цикл МК. В показанном примере было использовано значение 20, что привело к значению “Dead-Time” (2*20*62,5 нс = 2500 нс). Для быстрых MOSFET или IGBT это значение может быть уменьшено. Потребление тока можно измерить на шунте R7. Внимание: эта часть не отделена от сети гальванически и с ней следует обращаться с осторожностью. Прямое соединение между GNDI и PE неизбежно приводит к повреждению элементов при подаче питания.
Форма сигнала фаз адаптирована к работе двигателей в приведенной таблице. Другие формы сигнала могут быть сформированы путем замены значений таблицы. Опция «#define PURE_SINE_DRIVE» теперь находится в vfd.h. В этом случае генерируются 3 стандартные синусоиды с фазовым сдвигом на 120° без типичных двугорбых синусоид для BLDC. Если МК работает с частотой, отличной от 16 МГц, параметр «DIVISIONEER» в файле «vfd.h» также должен быть изменен так, чтобы дисплей работал правильно. Если вам нужен только источник переменного тока, вы должны заменить таблицу на реальные значения синуса (как указано в обновлении) и создать только два выходных каскада. Между двумя выходами преобразователя будет регулируемый потенциал переменного тока.
При вращении двигателя с полной скоростью не следует изменять направление вращения на противоположное. В любом случае рекомендуется остановить двигатель, а затем изменить направление вращения.
Скалярное(Вольт-частотное) управление (V/f)
Скалярное управление является наиболее часто используемым методом для преобразователей частоты. При скалярном методе управления, скорость асинхронного электродвигателя контролируется установкой величины напряжения и частоты статора, таким образом, чтобы магнитное поле в зазоре поддерживалось на нужной величине. Для поддержания постоянного магнитного поля в зазоре, отношение В/Гц должно быть постоянным на разных скоростях. На низких оборотах необходимо компенсировать падение напряжения на сопротивлении статора, поэтому отношение В/Гц на низких оборотах устанавливают выше чем номинальное значение. Скалярный метод управления наиболее широко используется для управления асинхронными электродвигателями.
Характеристика «Вольт/частота» означает, что двигатель работающий на 100% частоте может работать с полным номинальным напряжением, но с понижением частоты также должно быть отрегулировано рабочее напряжение. Например на двигатель работающий на 50% от номинальной частоты не должно подаваться более 50% рабочего напряжения и т. Д. Точные значения различны и поэтому должны быть взяты из документации на двигатель или определены путем проб и ошибок.
Индикация обеспечивает достигнутый крутящий момент («мощность») двигателя. Он должен быть не больше, чем может обеспечить двигатель. Громкий шум, например, знак слишком большого напряжения, отношение V/f должно быть меньше. Тем не менее, часто достаточно предоставить двигателю 100% рабочее напряжение при номинальной частоте (например, 50 Гц), а на пониженной частоте МК также пропорционально уменьшит среднее напряжение на обмотках двигателя.
Схема устройства
В схеме не используются какие-либо специальные компоненты. 5-вольтовый DC-DC преобразователь используется от зарядки мобильного телефона, а в случае 18-Вольтового преобразователя был использован небольшой источник питания для светодиодных светильников, где путем изменениея номиналов компонентов было увеличено напряжение с 12 до 18 Вольт. Требуемый ток зависит от выбранной микросхемы драйвера полумоста и ключей, находится в пределах около 150 мА для всех трех каналов. Как всегда, хорошая гальваническая развязка максимально важна для компонентов драйвера. Импульсы в нагрузке, вызванные переключением затворов, должны сглаживаться конденсаторами, как показано на схеме. 5-вольтовая часть питания потребляет около 40-80 мА без подсветки ЖК-дисплея, а львиная доля идет на светодиоды оптопар. Импульсные источники питания (например, зарядное от мобильного телефона) питаются от сети переменного тока. Так как в схеме имеется диодный мост B1, можно удалить внутренние диодные мосты этих источников питания и подключится уже к сети постоянного тока V+.
Известно, что частотные преобразователи генерируют высокочастотные импульсы поэтому необходимо исключить попадание их в бытовую сеть.Также желательно, чтобы более длинные провода от выхода преобразователя до потребителя были экранировны, либо проходили через фильтр непосредственно на выходе преобразователя. Частота ШИМ составляет около 31 кГц и имеет крутые фронты, поэтому необходимо уделить не мало внимания для подавления этих помех. Конденсаторы C15 – C18 должны быть класса X2, причем C17/C18 типа Y. Подходящими являются специально предназначенные конденсаторы для подавления помех, если они имеют необходимый диэлектрический запас прочности. Как видно на рисунке, я использовал готовый сетевой фильтр с разъемом для шнура питания. Шунт R7 (шунт) должен выдерживать рабочий ток двигателя, я использовал 5-ваттный керамический резистор. Высокий пусковой ток, когда конденсатор постоянного тока не заряжен, ограничен R11, высокоамперный NTC, который также распространен в блоках питания ПК. здесь хорошо подходит тип 644, например, Philips.
Кстати, 18 Вольт используются только потому, что доступные мне в данный момент оптопары типа 3120 требуют напряжения питания не менее 16 вольт. Если бы у меня были оптопары типа HCPL3180, 12 Вольт было бы достаточно.
Показанный на схеме выходной каскад (показана только одна фаза, две другие идентичны) имеет встроенную токовую защиту, реализованную на шунте R7 и транзисторах T1 и T2. Если ток потребления слишком высок (около 2 А), T1 открывается и включает T2. Высокий уровень на коллекторе T2 активирует вход отключения микросхемы драйвера. Дросселя L4 и L3 должны быть сильноточными, имеющими запас по максимальному току двигателя.
Конденсаторы, подключенные параллельно кнопкам, предотвращают поступление помех от соседних линий LCD и PWM и обеспечивают минимальный ток на кнопках. Кнопки циклически опрашиваются командный интерпретатором и, следовательно, не требуют отдельной функции антидребезга.
Рядом с ISP разъемом имеется дополнительный разъем SV1. К его контактам могут быть подключены два аналоговых сигнала (контакты 6 и 8). Контакт 6 (5 канал АЦП) управляет отношением V/f, сигнал управления частотой подается на контакт 8 (4 канал АЦП). Контакт 4 переключает между внешним (АЦП) и внутренним (кнопка и ЖК-дисплей) управлением. Когда контакт замкнут на землю, система переключается на внешнее управление. Контакт 2 используется для изменения направления вращения двигателя.
Важным замечанием является различие между GND и GNDI: GND – это часть питания управляющей электроники, отделенная от сети, в то время как GNDI подключается напрямую к сети. Ни при каких обстоятельствах нельзя соединять GND и GNDI! Наоборот, в любом случае следует соблюдать достаточные безопасные расстояния. Поэтому в моем прототипе плата управления и питания полностью отделены друг от друга и соединены только платой оптопар.
Выводы
Из-за простоты управляющей части и использования стандартных компонентов представленный преобразователь частоты является достойным проектом, чтобы продемонстрировать возможности современных микроконтроллеров и поэкспериментировать с управлением двигателями. В зависимости от используемого выходного каскада возможно управлять другими типами двигателей, например, от электромобилей, жестких дисков, зеркальных головок лазерных принтеров. Изменение частоты ШИМ, производится в подпрограмме TimersInit(). Другие настройки прескалера для всех 3-х таймеров могут изменены с помощью битов «CSx1», в настоящее время установленных на 0. Конечно, MК также может работать с внутренним генератором 8 МГц. Это дает еще два свободных контакта порта, например, для осуществления обратной связи по току или контроль скорости.
Внешнее управление аналоговыми входами позволяет использовать привода серводвигателей, таких как “Capstan” и, например этими средствами стабилизировать PLL. Встроенный ПИД-регулятор с регулируемыми параметрами позволяет адаптировать его к широкому кругу задач. В любом случае мне интересно, что читатель может подумать о дополнениях, и я с нетерпением жду предложений и идей. Еще одно замечание: стоит сравнить цены различных возможных контроллеров. Зачастую «большой» ATmega328 теперь дешевле купить, чем его младших братьев. Если используется другой контроллер (Mega88, 168 и 328 все совместимы друг с другом), это следует учитывать в настройках проекта.
Автор: Matthias S
| Файлы к статье “Частотный преобразователь для асинхронного двигателя на AVR” | |
| Описание:
Исходный код(Си), схема Eagle |
|
| Размер файла: 202.16 KB Количество загрузок: 1 555 | Скачать |
С все более увеличивающимся ростом автоматизации в бытовой сфере появляется необходимость в современных системах и устройствах управления электродвигателями.
Управление и преобразование частоты в небольших по мощности однофазных асинхронных двигателях, запускаемых в работу с помощью конденсаторов, позволяет экономить электроэнергию и активирует режим энергосбережения на новом, прогрессивном уровне.
Принцип работы однофазной асинхронной машины
В основе работы асинхронного двигателя лежит взаимодействие вращающегося магнитного поля статора и токов, наводимых им в роторе двигателя. При разности частоты вращения пульсирующих магнитных полей возникает вращающий момент. Именно этим принципом руководствуются при регулировании скорости вращения асинхронного двигателя с помощью частотного преобразователя.
Электродвигатель по факту может считаться двухфазным, но у него только одна рабочая обмотка статора, вторая, расположенная относительно главной под углом в 90о является пусковой.
Пусковая обмотка занимает в конструкции статора 1/3 пазов, на главную обмотку приходится 23 паза статора.
Ротор однофазного двигателя коротко замкнутый, помещенный в неподвижное магнитное поле статора, начинает вращаться.
Рис.№1 Схематический рисунок двигателя, демонстрирующий принцип работы однофазного асинхронного двигателя.
Основные виды однофазных электроприводов
Кондиционеры воздуха, холодильные компрессоры, электрические вентиляторы, обдувочные агрегаты, водяные, дренажные и фекальные насосы, моечные машины используют в своей конструкции асинхронный трехфазный двигатель.
Все типы частотников преобразуют переменное сетевое напряжение в постоянное напряжение. Служат для формирования однофазного напряжения с регулируемой частотой и заданной амплитудой для управления вращения асинхронных двигателей.
Управление скоростью вращения однофазных двигателей
Существует несколько способов регулирования скорости вращения однофазного двигателя.
- Управление скольжением двигателя или изменением напряжения. Способ актуален для агрегатов с вентиляторной нагрузкой, для него рекомендуется использовать двигатели с повышенной мощностью. Недостаток способа – нагрев обмоток двигателя.
- Ступенчатое регулирование скорости вращения двигателя с помощью автотрансформатора.
Рис.№2. Схема регулировки с помощью автотрансформатора.
Достоинства схемы – напряжение выхода имеет чистую синусоиду. Способность трансформатора к перегрузкам имеет большой запас по мощности.
Недостатки – автотрансформатор имеет большие габаритные размеры.
Использование тиристорного регулятора оборотов двигателя. Применяются тиристорные ключи, подключенные встречно-параллельно.
Рис. №3.Схема тиристорного регулирования однофазного асинхронного электродвигателя.
При использовании для регулирования скорости вращения однофазных асинхронных двигателей, чтобы избежать негативного влияния индукционной нагрузки производят модификацию схемы. Добавляют LRC-цепи для защиты силовых ключей, для корректировки волны напряжения используют конденсатор, минимальная мощность двигателя ограничивается, так гарантируется старт двигателя. Тиристор должен иметь ток выше тока электродвигателя.
Транзисторный регулятор напряжения
В схеме используется широтно-импульсная модуляция (ШИМ) с применением выходного каскада, построенного на использовании полевых или биполярных IGBT транзисторах.
Рис. №4. Схема использования ШИМ для регулирования однофазного асинхронного электродвигателя.
Частотное регулирование асинхронного однофазного электродвигателя считается основным способом регулирования частоты электродвигателя, мощности, эффективности использования, скорости и показателей энергосбережения.
Рис. №5. Схема управления электродвигателем без исключения из конструкции конденсатора.
Частотный преобразователь: виды, принцип действия, схемы подключения
Частотный преобразователь разрешает своему владельцу снизить энергопотребление и автоматизировать процессы в управлении оборудованием и производством.
Основные компоненты частотного преобразователя: выпрямитель, конденсатор, IGBT-транзисторы, собранные в выходной каскад.
Благодаря способности управлением параметрами выходной частоты и напряжения достигается хороший энергосберегающий эффект. Энергосбережение выражается в следующем:
- В двигателе поддерживается неизменный текущий момент ращения вала. Это обусловлено взаимодействием выходной частоты инверторного преобразователя с частотой вращения двигателя и соответственно, зависимостью напряжения и крутящего момента на валу двигателя. Значит, что преобразователь дает возможность автоматически регулировать напряжение на выходе при обнаружении превышающего норму значения напряжения с определенной рабочей частотой нужно для поддержания требуемого момента. Все инверторные преобразователи с векторным управлением имеют функцию поддержания постоянного вращающего момента на валу.
- Частотный преобразователь служит для регулировки действия насосных агрегатов (см. страницу). При получении сигнала, поступающего с датчика давления, частотник снижает производительность насосной установки. При снижении оборотов вращения двигателя уменьшается потребление выходного напряжения. Так, стандартное потребление воды насосом требует 50Гц промышленной частоты и 400В напряжения. Руководствуясь формулой мощности можно высчитать соотношение потребляемых мощностей.
Уменьшая частоту до 40Гц, уменьшается величина напряжения до 250В, означает, что уменьшается количество оборотов вращения насоса и потребление энергии снижается в 2,56 раз.
Рис. №6. Использование частотного преобразователя Speedrive для регулирования насосных агрегатов по систем CKEA MULTI 35.
Для повышения энергетической эффективности использования частотного преобразователя в управлении электродвигателем необходимо сделать следующее:
- Частотный преобразователь должен соответствовать параметрам электродвигателя.
- Частотник подбирается в соответствии с типом рабочего оборудования, для которого он предназначен. Так, частотник для насосов функционирует в соответствии с заложенными в программу параметрами для управления работой насоса.
- Точные настройки параметров управления в ручном и автоматическом режиме.
- Частотный преобразователь разрешает использовать режим энергосбережения.
- Режим векторного регулирования позволяет произвести автоматическую настройку управления двигателем.
Преобразователь частоты однофазный
Компактное устройство преобразования частоты служит для управления однофазными электродвигателями для оборудования бытового предназначения. Большинство частотных преобразователей обладает следующими конструктивными возможностями:
- Большинство моделей использует в своей конструкции новейшие технологии векторного управления.
- Они обеспечивают улучшенный вращающий момент однофазного двигателя.
- Энергосбережение введено в автоматический режим.
- Некоторые модели частотных преобразователей используют съемный пульт управления.
- Встроенный PLC контроллер (он незаменим для создания устройств сбора и передачи данных, для создания систем телеметрии, объединяет устройства с различными протоколами и интерфейсами связи в общую сеть).
- Встроенный ПИД регулятор (контролирует и регулирует температуру, давление и технологические процессы).
- Напряжение выхода регулируется в автоматическом режиме.
Рис.№7. Современный преобразователь Optidrive с основными функциональными особенностями.
Важно: Однофазный преобразователь частоты, питаясь от однофазной сети напряжением 220В, выдает три линейных напряжения, величина каждого из них по 220В. То есть, линейное напряжение между 2 фазами находится в прямой зависимости от величины выходного напряжения самого частотника.
Частотный преобразователь не служит для двойного преобразования напряжения, благодаря наличию в конструкции ШИМ-регулятора, он может поднять величину напряжения не более чем на 10%.
Главная задача однофазного преобразователя частоты – обеспечить питание как одно- так и трехфазного электродвигателя. В этом случае ток двигателя будет соответствовать параметрам подключения от трехфазной сети, и оставаться постоянным
Частотное регулирование однофазных асинхронных электродвигателей
Первое на что обращаем внимание при выборе частотника для своего оборудования – это соответствие сетевого напряжения и номинального значения тока нагрузки, на который рассчитан двигатель. Способ подключения выбирается относительно рабочего тока.
Главным в схеме подключения является наличие фазосдвигающего конденсатора, он служит для сдвига напряжения, поступающего на пусковую обмотку. Она служит для пускового включения двигателя, иногда после того, как двигатель заработал, пусковая обмотка вместе с конденсатором отключается, иногда остается включенной.
Схема подключения однофазного двигателя с помощью однофазного частотного преобразователя без использования конденсатора
Выходное линейное напряжение устройства на каждой фазе равно выходному напряжению частотника, то есть на выходе будет три напряжения линии, каждое по 220В. Для запуска может использоваться только пусковая обмотка.
Рис. №8. Схема присоединения однофазного асинхронного двигателя через конденсатор
Фазосдвигающий конденсатор не может обеспечить равномерный фазовый сдвиг в пределах границ частот инвертора. Частотник обеспечит равномерный сдвиг фаз. Для того, чтобы исключить из схемы конденсатор, нужно:
- Конденсатор стартера С1 удаляется.
- Вывод обмотки двигателя присоединяем к точке выхода напряжения частотника (используется прямая проводка).
- Точка А присоединяется к СА; В соединяется с СВ; W соединяется к СС, таким образом электродвигатель присоединится напрямую.
- Для включения в обратном направлении (обратная проводка) необходимо В присоединить к СА; А присоединить к СВ; W соединить с СС.
Рис. №9. Схема подключения однофазного асинхронного двигателя без использования конденсатора.
На видео — Частотный преобразователь. Подключение трехфазного двигателя в однофазную сеть 220В.
Частотный преобразователь. Подключение трехфазного двигателя в однофазную сеть 220В.
Watch this video on YouTube
До появления частотных преобразователей на рынке современной энергетики, электромонтёрам приходилось применять для подключения асинхронного двигателя стартовый или фазосдвигающий конденсатор большой ёмкости.
Двигатель при этом работал, но существенно терял мощность. Также, применение конденсаторов сильно разогревало обмотки двигателя, что сильно снижало его ресурс работы, и двигатели часто приходилось «перематывать». Учитывая, что обмотки асинхронного двигателя делаются из медной проволоки, то такие ремонты приносили большой ущерб.
Так как асинхронный двигатель является составной частью почти каждого современного привода, то вопрос создания частотного регулирования вставал на особый уровень. И вот, частотники уже повсеместно применяются для подключения электрического двигателя к сети и его управление.
По сути, частотный инвертор, это прибор, изменяющий частоту поданного на обмотки напряжения с ШИМ-регулированием. Благодаря частотнику, получилось подключить асинхронный двигатель к сети без ущерба его ресурсу, без перегрева, и ещё дать массу возможностей по управлению скоростью вращения вала.
Также, применяя различные интерфейсы передачи данных и команд, применение частотников позволило объединить все приводы большого предприятия в одно диспетчерскую систему управления и контроля параметров.
В мир современной автоматизации технологических процессов, это весомый аргумент.
Устройство частотных преобразователей
Современный частотный инвертер состоит из двух принципиальных блоков. Первый блок полностью сглаживает напряжение и на выходе выдаёт постоянное. Постоянное напряжение подаётся на силовой блок генерации частоты. После преобразования, на выходе из второго блока частота напряжения уже будет такая, какая задана настройкой.
За возможность изменять частоту напряжения отвечает микропроцессор, который встроен в частотник. Используя заданную программу, процессор следит за выходной частотой напряжения, а также за параметрами работы электрического двигателя.
По сути, частотные преобразователи для асинхронных двигателей принцип работы которых заключён в простом вырабатывании нужной частоты переменного тока, это модуляторы нужной природы напряжения, которая необходима для того или иного оборудования. Именно это и снизило негативное влияние на работу электрического двигателя, которое имело место быть при использовании конденсатов.
Электрический двигатель получает именно такое напряжение, которое положено ему для нормальной и полноценной работы.
Считаем нужным отметить, что и при наличии линии трёхфазного напряжения, не всегда рационально подключать электрический двигатель к сети просто через выключатель. В таком случае, двигатель будет работать, но регулировать его работу не получится. Не получится и следить за состоянием обмоток.
В промышленном исполнении можно встретить два основных типа частотных преобразователей:
- Специальные.
- Универсальные.
Специальный частотный преобразователь для асинхронного двигателя, схема которого несколько отличается от универсального, изготавливается под конкретное оборудование по конкретным потребностям. Как правило, это очень урезанные версии, не способные на работу с любым оборудованием.
Универсальные частотные инвертера могут работать, как и в специальном оборудовании, так и во всех остальных вариантах применения. На то они и универсальные, что их можно настраивать и программировать под любые нужды.
Поэтому, выбор частотного преобразователя для асинхронного двигателя должен быть не столько продиктован конкретными необходимостями производства, но и возможностью модернизации оборудования.
Практически во всех частотниках сегодня реализована возможность установки и контроля режима работы электрического двигателя с пульта управления. Первый интерфейс управления встроен в сам корпус частотника. Там же есть и ручка регулирования скорости вращения двигателя.
Но можно и применять выносные пульты управления. Которые можно располагать как в диспетчерской, так и непосредственно на станке, который приводится в движение электрическим двигателем.
Такое чаще встречается в ситуациях, когда станок с двигателем находится в помещении, где не рекомендуется установка частотного инвертора. И его устанавливают вдали от оборудования.
Большая часть инвертеров частоты позволяют программировать работу оборудования. Но, задать программу просто с пульта управления не получится. Для этого используется интерфейс передачи данных и настройки, который, при помощи компьютера позволяет задать нужную программу работы.
Разница типов сигналов управления
При проектировании цеха очень важно учитывать, что общение частотных преобразователей с диспетчерским пультом будет происходить при помощи электрических импульсов по проводам связи. Пи этом, не стоит забывать, что разные стандарты связи по-разному влияют друг на друга. Посему, переда данных одним способом, может существенно снижать качество передачи данных другим способом.
Поэтому, расчет частотного преобразователя для асинхронного двигателя должен производиться не только по его электротехническим показателям, но и по показателям совместимости с сетью.
Выбор мощности частотного преобразователя
Вопрос мощности частотника, скорее всего, стоит на первом плане, при расчете привода для любого станка или агрегата. Дело в том, что большинство частотных инвертеров способны выдерживать большие перегрузки до 200 – 300 %. Но, это совсем не означает, что для питания электрического двигателя можно смело покупать частотник сегментом ниже, чем требуется по планированию.
Выбор мощности частотного преобразователя осуществляется с обязательным запасом в 20 – 30%. Игнорирование этого правила может повлечь за собой выход из строя частотного преобразователя и простой оборудования.
Также важно учитывать пиковые нагрузки, которые может выдерживать частотник. Дело в том, что при старте электрического двигателя его пусковые токи могут сильно превышать номинальные. В некоторых случаях, пусковой ток превышает номинальный в шесть раз! Частотик должен быть рассчитан на такие изменения.
Каждый электрический двигатель оборудован вентилятором охлаждения. Это лопасти, которые установлены в задней части двигателя и по мере вращения вала прогоняют через корпус мотора воздух.
Если электрический двигатель работает на пониженных оборотах, то мощности потока воздуха может не хватить для охлаждения.
В этом случае, нужно выбирать частотник с датчиками температуры двигателя. Или организовать дополнительное охлаждение.
Электромагнитная совместимость преобразователей частоты
При расчёте и подключении частотника к сети и электрическому двигателю, следует помнить, что он очень подвержен помехам. Также, преобразователь частоты может и сам стать источником помех для другого оборудования. Именно поэтому, все подключения к частотнику и от него выполняются экранированными кабелями и выдерживанием дистанции в 10 см друг от друга.
По своей сути, применение частного преобразователя для питания асинхронного электрического двигателя позволило существенно продлить жизнь электрического двигателя, дало возможность регулировать работу двигателя и хорошо экономить на расходе электрической энергии.
Частотник, частотный преобразователь1ф 220 – 3ф220 для асинхронного электродвигателя
Watch this video on YouTube
асинхронный двигатель | KSB
Асинхронный двигатель имеет пассивный ротор, который закорочен постоянно (короткозамкнутый ротор) или временно (см. Ротор со скользящим кольцом). Он может производить до нескольких мегаватт и чаще всего используется в качестве стандартного трехфазного двигателя в промышленных приложениях.
Магнитное поле в асинхронном двигателе генерируется током намагничивания через электрическую энергию. Асинхронные двигатели характеризуются скольжением, т.е. е.зависящая от нагрузки разница между скоростью вращения ротора и скоростью вращения поля напряжения питания.
Ротор представляет собой металлическую клетку с осевыми стержнями, расположенными симметрично по кругу и прикрепленными к кольцу короткого замыкания (концевому кольцу) на каждом конце.
Статор содержит распределенные катушки, которые индуцируют напряжение в стержнях ротора (см. Индукция) посредством вращающегося магнитного поля. Это приводит к сильному току в короткозамкнутых стержнях, который создает силу между ротором и статором в магнитном поле и приводит к электромагнитному взаимодействию, ответственному за асинхронизм.Асинхронные двигатели подвержены значительным потерям в статоре и роторе.
В двигателях с контактным ротором трехфазная обмотка ротора соединяется с переменными резисторами – обычно используемыми в качестве жидкостных пускателей – через контактные кольца. Такая конструкция обеспечивает плавный запуск, который не создает ударную нагрузку на сеть электропитания и позволяет в определенной степени изменять скорость. Однако это также приводит к значительным потерям мощности.
Обмотки ротора короткозамкнутого ротора, как правило, состоят из одно- или двухпроводных стержней, которые на своих концах закорочены кольцевым проводником.Роторы с короткозамкнутым ротором очень просты по конструкции, надежны и не требуют обслуживания. См. Рис. 1 Асинхронный двигатель
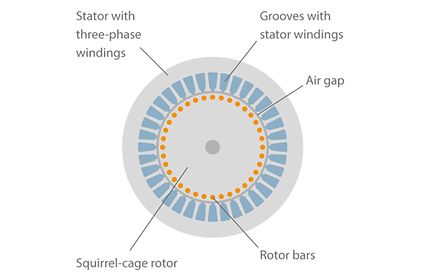 Рис. 1 Асинхронный двигатель: вид в разрезе асинхронного двигателя
Рис. 1 Асинхронный двигатель: вид в разрезе асинхронного двигателя
Различают сухие роторные, погружные и мокрые роторные двигатели в отношении контакта с водой. См. Рис. 2 Асинхронный двигатель
| Внутреннее смачивание | Внешнее смачивание | ||
|---|---|---|---|
| Ротор | Намотка | Сухой корпус | Мокрый корпус (погружной двигатель) |
| Сухой | Сухой сухой | Сухой двигатель (с защитой от проникновения воды или без нее) | Сухой (заполненный воздухом) погружной двигатель |
| Мокрый (двигатель с мокрым ротором) | Сухой (консервированный двигатель) | Мотор с мокрым ротором насоса без сальника | Полностью погружной (заполненный жидкостью) двигатель |
Рис.2 Асинхронный двигатель: обозначение асинхронных двигателей в зависимости от смачивания
Сухой двигатель имеет различные типы защиты от проникновения воды (см. Тип защиты).
Погружной двигатель частично или полностью погружен и обычно устанавливается в вертикальном положении. Тепло, генерируемое двигателем, передается непосредственно окружающей окружающей жидкости. Его отличительной чертой является корпус двигателя, который смачивается снаружи (см. Погружной насос двигателя).Внутреннее смачивание и глубина погружения отличают погружные двигатели, заполненные маслом или воздухом, для малых и средних глубин погружения (насосы с погружными электродвигателями для сточных вод) от полностью погружных двигателей.
См. Рис. 3, 4 Насос для сточных вод
Полностью погружные двигатели смачиваются жидкостью, обрабатываемой изнутри и снаружи. Они созданы для любой глубины погружения и, прежде всего, используются в скважинах (см. Погружные скважинные насосы), поэтому они имеют небольшой диаметр и относительно длинные.Полностью погружные двигатели могут быть оснащены мокрой обмоткой статора (включая водонепроницаемую пластиковую изоляцию) или, в сочетании с банкой, сухой обмоткой (см. Консервированный моторный насос).
Двигатель с мокрым ротором заполнен жидкостью и, в отличие от погружного двигателя, его корпус не смачивается снаружи. Он имеет подшипники с жидкой смазкой (см. Подшипники скольжения) и вместе с насосом образует герметически закрытый насосный агрегат (насос без сальника). Двигатель может быть оснащен мокрой обмоткой статора или, в сочетании с банкой, сухой обмоткой и часто является предпочтительным двигателем для циркуляционных насосов.
Трехфазный асинхронный двигательY СЕРИЯ ТРЕХФАЗНЫЙ АСИНХРОННЫЙ ДВИГАТЕЛЬ
Введение: трехфазный асинхронный двигатель серии Y является полностью закрытым вентилятором охлаждения двигателя с цилиндрическим сепаратором, в соответствии со стандартом ICE. Он обладает выдающимися характеристиками, такими как высокая эффективность, энергосбережение, высокий пусковой момент, низкий уровень шума, небольшая вибрация и простота обслуживания.
Области применения : общего назначения, включая режущие машины, вентиляторы, станки, смеситель, сельскохозяйственную технику и насосы и т. Д.
Условия эксплуатации
Температура окружающей среды: -15 ° C Номинальное напряжение: 380 В или любое напряжение от 220 до 660 В.
Номинальная частота: 50 Гц, 60 Гц Класс защиты: IP44, IP54, IP55
Класс изоляции: B F Метод охлаждения: IC0141 Обязанность: S1 (непрерывная)
Подключение: соединение звездой до 3 кВт , дельта-соединение для 4кВт и выше.
Технические данные
| Серия Y Трехфазный асинхронный двигатель | |||||
| Модель | Мощность | Полная нагрузка | |||
| кВт | HP | Cuttent ( А) | скорость (об / мин) | ||
| 380 В 50 Гц AS Асинхронная скорость 3000 об / мин (2 полюса) | |||||
| Y-801-2 | 0.75 | 1 | 1,81 | 2830 | |
| Y-802-2 | 1,1 | 1,5 | 2,52 | 2830 | |
| Y-90S-2 | 1,5 | 2 | 3.44 | 2840 | |
| Y-90L-2 | 2.2 | 3 | 4.83 | 2840 | |
| Y-100L-2 | 3 | 4 | 6.39 | 2870 | |
| Y-112M-2 | 4 | 5.5 | 8.17 | 2890 | |
| Y-132S1-2 | 5.5 | 7.5 | 11.1 | 2900 | |
| Y-132S2-2 | 7.5 | 10 | 15 | 2900 | |
| Y-160M1-2 | 11 | 15 | 21,8 | 2930 | |
| Y-160M2-2 | 15 | 20 | 29.4 | 2930 | |
| Y-160L-2 | 18,5 | 25 | 35,5 | 2930 | |
| Y-180M-2 | 22 | 30 | 42,2 | 2940 | |
| 380 В 50 Гц AS Асинхронная скорость 1500 об / мин (4 полюса) | ||||
| Y-801-4 | 0.55 | 0,75 | 1,51 | 1390 |
| Y-802-4 | 0,75 | 1 | 2,01 | 1390 |
| Y-90S-4 | 1,1 | 1,5 | 2,75 9553 | 1400 |
| Y-90L-4 | 1,5 | 2 | 3.65 | 1400 |
| Y-100L1-4 | 2.2 | 3 | 5.03 | 1430 |
| Y-100L2-4 | 3 | 4 | 6.82 | 1430 |
| Y-112M-4 | 4 | 5,5 | 8,77 | 1440 |
| Y-132S-4 | 5.5 | 7.5 | 11.6 | 1440 |
| Y-132M-4 | 7.5 | 10 | 15,4 | 1440 |
| Y-160M-4 | 11 | 15 | 22,6 | 1460 |
| Y-160L-4 | 15 | 20 | 30.3 | 1460 |
| Y-180M-4 | 18,5 | 25 | 35,9 | 1470 |
| Y-180L-4 | 22 | 30 | 42,5 | 1470 |
| 380 В 50 Гц AS Асинхронная скорость 1000 об / мин (6 полюсов) | ||||
| Y-801-6 | 0.37 | 0,5 | 1,2 | 900 |
| Y-802-6 | 0,55 | 0,75 | 1,45 | 900 |
| Y-90S-6 | 0,75 | 1 | 2,25 | 910 |
| Y-90L-6 | 1,1 | 1,5 | 3.16 | 910 |
| Y-100L-6 | 1,5 | 2 | 3,97 | 940 |
| Y-112M-6 | 2,2 | 3 | 5,61 | 940 |
| Y-132S-6 | 3 | 4 | 7.23 | 960 |
| Y-132M1-6 | 4 | 5.5 | 9,4 | 960 |
| Y-132M2-6 | 5,55353 | 7,5 | 12,6 | 960 |
| Y-160M-6 | 7,5 | 10 | 17 | 970 |
| Y-160L-6 | 11 | 15 | 24,6 | 970 |
| Y-180M-6 | 15 | 20 | 31.4 | 970 |
Асинхронный двигатель – это электродвигатель переменного тока (AC), который использует индуктивный ток в своем роторе, а не физический источник питания для создания своего вращательного движения. Большинство электродвигателей вращаются в результате взаимодействия электромагнитных полей, создаваемых в статоре и роторе двигателя. В асинхронном двигателе поле, создаваемое в обмотках статора, создается путем подключения их к источнику переменного тока.Поле, генерируемое в роторе, обеспечивается не прямым вводом тока, а, скорее, через трансформаторную индукцию тока благодаря любезному электромагнитному полю статора. Наиболее крупные двигатели переменного тока для промышленного или бытового применения являются асинхронными двигателями.
 Цилиндрический сердечник асинхронного двигателя обеспечивает вращательный привод.
Цилиндрический сердечник асинхронного двигателя обеспечивает вращательный привод.Асинхронные двигатели, также известные как асинхронные или короткозамкнутые двигатели, состоят из двух основных компонентов. Первый – это статор, то есть бочкообразная внешняя рама двигателя. Статор асинхронного двигателя имеет несколько обмоток или катушек, расположенных вдоль его внутренней поверхности, каждая из которых включает в себя набор электрических соединений на внешней стороне рамы.Вторым основным компонентом является ротор – цилиндрический сердечник, который плотно прилегает к статору. Вал двигателя, который обеспечивает вращательную работу, проходит через середину или ротор и поддерживается на обоих концах подшипниками. В асинхронном двигателе ротор изготовлен из цельной стали или состоит из серии параллельных стальных или медных стержней без возможности подачи электрического тока.
Большинство двигателей переменного тока полагаются на полярную зависимость отдельных электромагнитных полей, генерируемых в обеих этих частях, для вращения ротора.В асинхронном двигателе электромагнитное поле статора генерируется источником переменного тока, подключенным к обмоткам статора. Ротор, однако, напрямую не связан с каким-либо источником питания, а вырабатывает внутренний электрический ток посредством индукции. Эта индукция вызвана непосредственной близостью электромагнитного поля статора. Это точно такой же процесс, который используется для генерации тока во вторичных обмотках трансформатора. Ток, создаваемый в роторе, генерирует собственное электромагнитное поле, и ротор начинает вращаться.
Асинхронный двигатель идеально подходит для тяжелых условий эксплуатации благодаря своей простоте и прочности. Отсутствие дополнительных контактных колец и щеток, необходимых для подачи питания на ротор, делает этот тип двигателя одним из самых надежных и эффективных конструкций двигателя переменного тока. Асинхронные двигатели также могут быть использованы в качестве генераторов, если они работают на определенных скоростях.
,YDKS-15-4 15W 0.18A 4P АСИНХРОННЫЙ ДВИГАТЕЛЬ ДЛЯ СМИ Крытый кондиционер
Наименование: Кондиционер двигателя
мощность: 15 Вт
напряжение: 220-240 В 50 Гц
ток: 0.18A
Тип: YDKS-15-4
Пакет: 1 х вентиляторный двигатель

Перевозка:
1.Все детали будут отправлены в течение времени обработки после получения платежа. Если платеж не доступен, ваш заказ будет автоматически закрыт.
2. DHL / UPS / Federal Express обычно занимает около 3-7 рабочих дней по назначению. И это около 5-10 дней работы по EMS или TNT. Воздушная почта столба и парцелла воздуха столба Гонконг принимает 7 до 30 дней, чтобы грузить к всемирно.
3. Покупатель несет ответственность за любое страхование, проблемы и ущерб, вызванные службы доставки таких аварий, задержек или других вопросов.Кроме того, покупатель должен нести ответственность за любые налоги и / или обязанности порученных их страной.
Оплата:
В настоящее время Aliexpress принимает Visa, MasterCard, Western Union, QIWI и банковский перевод. Другие варианты оплаты будут доступны на Aliexpress в будущем.
Гарантия и гарантия:
1. Все товары проверяются перед отгрузкой, так что если вы не удовлетворены покупкой, вы можете обменять детали в одной неделе и вы должны связаться с нами в течение 24 часов с момента получения покупки
2.Доставку и обработку плата не возвращается и клиент должен быть ответственным за все расходы, возврата и повторной отправки.
3. Все возвращенные детали должны находиться в своих первоначально условиях, включая коробку и вспомогательное оборудование. Мужчины дефекты не гарантированы, таких как осколки, царапины и так далее.
4. Для всех деталей, пожалуйста пошлите EMS или вашим местным столбом когда пошлите назад.
Другие политики:
1. Мы не несем ответственности за любые таможенные пошлины или налог на импорт.
2. Пожалуйста, оставьте положительную обратную связь после получения товара, если вы удовлетворены нашей продукции и услуг. И мы будем делать то же самое. Пожалуйста, свяжитесь с нами, если вы не удовлетворены пункта после того, как получить его, мы будем стараться все возможное, чтобы поддержать вас.
3. Все письма будут даны ответы в течение 1 рабочего дня. Если вы не получили ответа, пожалуйста, любезно повторно выслали свою электронную почту, и мы постараемся ответить вам как можно скорее.
4. Серьезный покупатель только! Пожалуйста, место ставку, только если вы согласны со всеми условиями.
Больше новостей
