
Расчетные формулы основных параметров асинхронных двигателей
В таблице 1 представлены расчетные формулы для определения основных параметров асинхронных двигателей.
В данной таблице собраны все формулы, которые касаются расчета параметров асинхронных двигателей.
Используя формулы из данной таблицы, вам больше не придется искать нужную формулу в различных справочниках.
Таблица 1 — Расчетные формулы для определения основных параметров асинхронных двигателей
| Наименование величин | Формулы | Принятые обозначения |
|---|---|---|
| Потребляемая активная мощность из сети, кВт | U1, I1 – линейные значения напряжения, В и тока двигателя, А; cosϕ – коэффициент мощности; | |
| Потребляемая реактивная мощность, квар | ||
| Полезная мощность на валу, кВт | Ƞ — КПД двигателя; | |
| Потребляемый двигателем ток, А | ||
| Вращающий момент двигателя, кГм | nном. – номинальная скорость вращения ротора, об/мин; – номинальная скорость вращения ротора, об/мин; | |
| Синхронная скорость вращения магнитного поля, об/мин | f1 – частота питающего тока, Гц; р – число пар полюсов машины; | |
| Скольжение двигателя | ||
| Скорость вращения ротора при нагрузке, об/мин | ||
| ЭДС обмоток статора и ротора, В | kоб.1, kоб.2 – обмоточные коэффициенты статора и ротора, равные произведению коэффициентов укорочения kу шага и распределения обмотки kw; kоб. = kу* kw; | |
| Коэффициенты трансформации по напряжению и по току | w1, w2 – числа витков обмоток статора и ротора; m1, m2 – числа фаз в обмотках статора и ротора.  У двигателей с фазным ротором. У двигателей с фазным ротором.m2 = 3 у двигателей с короткозамкнутым ротором; m2 = z2, т.е. числу пазов в роторе. | |
| Параметры схемы замещения | zк, rк, хк – полное, активное и индуктивное сопротивления при КЗ двигателя, Ом; ∆Рк – суммарные потери в меди статора и ротора двигателя, Вт; r1, x1 – активное и индуктивное сопротивления обмотки статора, Ом; r2’, x2’ – активные и индуктивные сопротивления ротора, приведенные к обмотке статора, Ом; | |
| Ток холостого хода, А | Iном. – номинальный ток двигателя, А | |
| Критическое скольжение | sinϕ – коэффициент реактивной мощности; kм – коэффициент перегрузочной способности; | |
| Уравнение вращающего момента | Sном. – скольжение при номинальной нагрузке – скольжение при номинальной нагрузке | |
| Скольжение двигателя s2 при введении добавочного сопротивления в ротор | ||
| КПД двигателя при введении добавочного сопротивления в ротор | ||
| Критический максимальный момент, развиваемый в двигательном (+) и генераторном (-) режимах, кГм | U1ф – фазное напряжение, В | |
| Уравнение вращающего момента при добавочном сопротивлении в цепи ротора |
Литература:
1. Справочная книга электрика. В.И. Григорьева, 2004 г.
Всего наилучшего! До новых встреч на сайте Raschet.info.
активное сопротивление двигателя, полное сопротивление двигателя, реактивное сопротивление двигателя, ток двигателяПоделиться в социальных сетях
Благодарность:
Если вы нашли ответ на свой вопрос и у вас есть желание отблагодарить автора статьи за его труд, можете воспользоваться платформой для перевода средств «WebMoney Funding».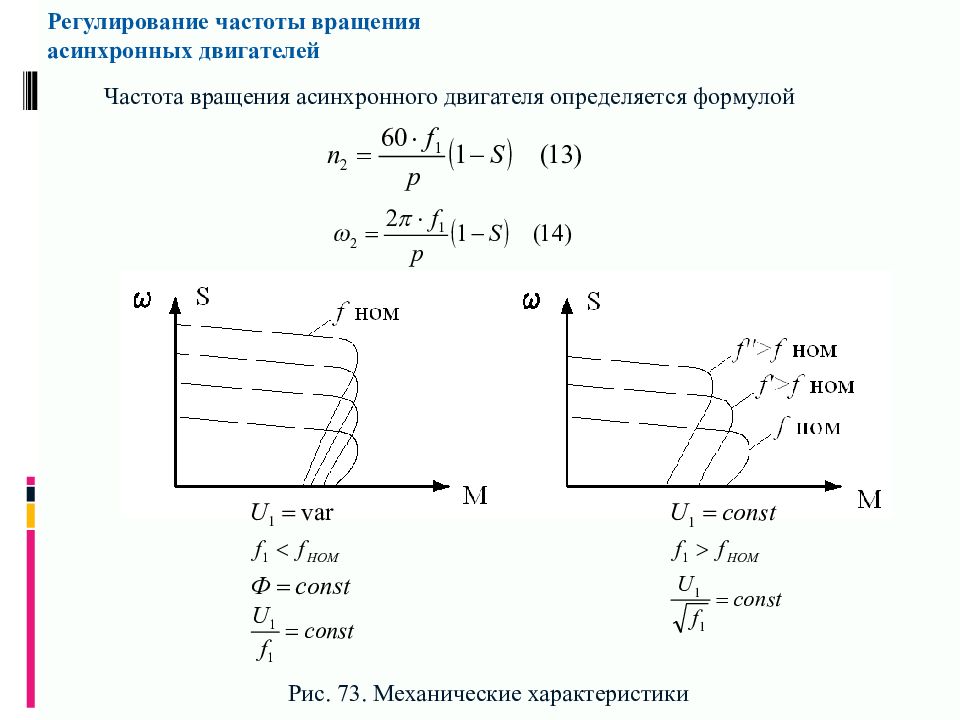
Данный проект поддерживается и развивается исключительно на средства от добровольных пожертвований.
Проявив лояльность к сайту, Вы можете перечислить любую сумму денег, тем самым вы поможете улучшить данный сайт, повысить регулярность появления новых интересных статей и оплатить регулярные расходы, такие как: оплата хостинга, доменного имени, SSL-сертификата, зарплата нашим авторам.
Управление частотным преобразователем, векторное, скалярное.
Компания Русэлком производит и поставляет преобразователи частоты для управления асинхронными двигателями. Поэтому для понимания принципа частотного управления рассмотрим более детально работу асинхронного двигателя и методы его частотного регулирования
Конструкция асинхронного двигателя схематически изображена на рис. 2. Двигатель состоит из неподвижной части, которая называется статор и подвижной (вращающейся) части называемой ротор.
В пазах статора уложены три группы обмоток А-В-С. Обмотки статора сдвинуты друг относительно друга в пространстве на угол 120°. Это является одним из двух обязательных условий для создания вращающегося магнитного поля статора.
Обмотки статора сдвинуты друг относительно друга в пространстве на угол 120°. Это является одним из двух обязательных условий для создания вращающегося магнитного поля статора.
Ротор двигателя изготовлен в виде цельного цилиндра из специальной электротехнической стали с короткозамкнутой обмоткой.
Рис.2. Схематический разрез асинхронного двигателя.
На обмотки статора от источника питания подается трехфазное напряжение uа, uв, uс с частотой
Напряжения uа, uв, uс сдвинуты друг относительно друга по фазе на 120°. Это является вторым обязательным условием для создания вращающегося магнитного поля статора.
При питании обмоток статора электрического двигателя трехфазным напряжением с частотой создается вращающееся магнитное поле. Угловая скорость вращения этого поля в радианах определяется по известной формуле
– число пар полюсов статора.
Переход от угловой скорости вращения поля измеряемой в радианах, к частоте вращения выраженной в оборотах в минуту, осуществляется по следующей формуле
где 60 – коэффициент пересчета размерности.
Подставив в это уравнение скорость вращения поля, получим, что
Из формулы видно, что частота вращения магнитного поля статора зависит от частоты напряжения питания и числа пар полюсов.
К примеру, в двигателе с одной парой полюсов при частоте питающего напряжения 50 Гц частота вращения магнитного поля равна 3000 об/мин.
В синхронном электрическом двигателе частота вращения ротора на установившемся режиме равна частоте вращения магнитного поля статора
В асинхронном электрическом двигателе частота вращения ротора на установившемся режиме отличается от частоты вращения на величину скольжения . Для примера в асинхронном двигателе с одной парой полюсов при частоте питающего напряжения 50 Гц и при скольжении 5% частота вращения ротора равна 2850 об/мин.
Таким образом, частота вращения ротора синхронного и асинхронного двигателей зависит от частоты напряжения питания.
На этой зависимости и основан метод частотного регулирования.
Изменяя с помощью преобразователя частоту на входе двигателя, мы регулируем частоту вращения ротора.
В наиболее распространенном частотно регулируемом приводе на основе асинхронных двигателей с короткозамкнутым ротором применяются скалярное и векторное частотное управление.
При скалярном управлении по определенному закону изменяют амплитуду и частоту приложенного к двигателю напряжения. Изменение частоты питающего напряжения приводит к отклонению от расчетных значений максимального и пускового моментов двигателя, к.п.д., коэффициента мощности. Поэтому для поддержания требуемых рабочих характеристик двигателя необходимо с изменением частоты одновременно соответственно изменять и амплитуду напряжения.
В существующих преобразователях частоты при скалярном управлении чаще всего поддерживается постоянным отношение максимального момента двигателя к моменту сопротивления на валу. То есть при изменении частоты амплитуда напряжения изменяется таким образом, что отношение максимального момента двигателя к текущему моменту нагрузки остается неизменным.
При постоянстве перегрузочной способности номинальные коэффициент мощности и к.п.д. двигателя на всем диапазоне регулирования частоты вращения практически не изменяются.
Максимальный момент, развиваемый двигателем, определяется следующей зависимостью
где – постоянный коэффициент.
Поэтому зависимость напряжения питания от частоты определяется характером нагрузки на валу электрического двигателя.
Для постоянного момента нагрузки поддерживается отношение U/f = const, и, по сути, обеспечивается постоянство максимального момента двигателя. Характер зависимости напряжения питания от частоты для случая с постоянным моментом нагрузки изображен на рис. 2. Угол наклона прямой на графике зависит от величин момента сопротивления и максимального крутящего момента двигателя.
Вместе с тем на малых частотах, начиная с некоторого значения частоты, максимальный момент двигателя начинает падать. Для компенсации этого и для увеличения пускового момента используется повышение уровня напряжения питания.
Для компенсации этого и для увеличения пускового момента используется повышение уровня напряжения питания.
В случае вентиляторной нагрузки реализуется зависимость U/f2 = const. Характер зависимости напряжения питания от частоты для этого случая показан на рис.3. При регулировании в области малых частот максимальный момент также уменьшается, но для данного типа нагрузки это некритично.
Используя зависимость максимального крутящего момента от напряжения и частоты, можно построить график U от f для любого типа нагрузки.
Важным достоинством скалярного метода является возможность одновременного управления группой электродвигателей.
Скалярное управление достаточно для большинства практических случаев применения частотно регулируемого электропривода с диапазоном регулирования частоты вращения двигателя до 1: 40.
Векторное управление позволяет существенно увеличить диапазон управления, точность регулирования, повысить быстродействие электропривода. Этот метод обеспечивает непосредственное управление вращающим моментом двигателя.
Этот метод обеспечивает непосредственное управление вращающим моментом двигателя.
Вращающий момент определяется током статора, который создает возбуждающее магнитное поле. При непосредственном управлении моментом необходимо изменять кроме амплитуды и фазу статорного тока, то есть вектор тока. Этим и обусловлен термин «векторное управление».
Для управления вектором тока, а, следовательно, положением магнитного потока статора относительно вращающегося ротора требуется знать точное положение ротора в любой момент времени. Задача решается либо с помощью выносного датчика положения ротора, либо определением положения ротора путем вычислений по другим параметрам двигателя. В качестве этих параметров используются токи и напряжения статорных обмоток.
Менее дорогим является частотно регулируемый электропривод с векторным управлением без датчика обратной связи скорости, однако векторное управление при этом требует большого объема и высокой скорости вычислений от преобразователя частоты.
Кроме того, для непосредственного управления моментом при малых, близких к нулевым скоростям вращения работа частотно регулируемого электропривода без обратной связи по скорости невозможна.
Векторное управление с датчиком обратной связи скорости обеспечивает диапазон регулирования до 1:1000 и выше, точность регулирования по скорости – сотые доли процента, точность по моменту – единицы процентов.
В синхронном частотно регулируемом приводе применяются те же методы управления, что и в асинхронном.
Однако в чистом виде частотное регулирование частоты вращения синхронных двигателей применяется только при малых мощностях, когда нагрузочные моменты невелики, и мала инерция приводного механизма. При больших мощностях этим условиям полностью отвечает лишь привод с вентиляторной нагрузкой. В случаях с другими типами нагрузки двигатель может выпасть из синхронизма.
Для синхронных электроприводов большой мощности применяется метод частотного управления с самосинхронизацией, который исключает выпадение двигателя из синхронизма. Особенность метода состоит в том, что управление преобразователем частоты осуществляется в строгом соответствии с положением ротора двигателя.
Особенность метода состоит в том, что управление преобразователем частоты осуществляется в строгом соответствии с положением ротора двигателя.
| | Адрес этой страницы (вложенность) в справочнике dpva.ru: главная страница / / Техническая информация / / Оборудование / / Электродвигатели. Электромоторы. / / Синхронные скорости вращения асинхронных электродвигателей в зависимости от частоты (10-100 Гц) и числа полюсов (2-12), Таблица и формула для расчета. Поделиться:
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Если Вы не обнаружили себя в списке поставщиков, заметили ошибку, или у Вас есть дополнительные численные данные для коллег по теме, сообщите , пожалуйста. Вложите в письмо ссылку на страницу с ошибкой, пожалуйста. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Коды баннеров проекта DPVA.ru Начинка: KJR Publisiers Консультации и техническая | Проект является некоммерческим. Информация, представленная на сайте, не является официальной и предоставлена только в целях ознакомления. Владельцы сайта www.dpva.ru не несут никакой ответственности за риски, связанные с использованием информации, полученной с этого интернет-ресурса. Free xml sitemap generator Free xml sitemap generator | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

§81. Регулирование частоты вращения асинхронных двигателей
Частота вращения асинхронного двигателя
n = n1 (1 – s) = (60f1/p) (1-s) (85)
Из этого выражения видно, что ее можно регулировать, изменяя частоту f1 питающего напряжения, число пар полюсов р и
Рис. 266. Схема переключения катушек обмотки статора (одной фазы) для изменения числа полюсов: а — при четырех полюсах; б — при двух полюсах
скольжение s. Последнее при заданных значениях момента на валу Мвн и частоты f1 можно изменять путем включения в цепь обмотки ротора реостата.
Регулирование путем изменения частоты питающего напряжения. Этот способ требует наличия преобразователя частоты, к которому должен быть подключен асинхронный двигатель. На основе управляемых полупроводниковых вентилей (тиристоров) созданы статические преобразователи частоты и построен ряд опытных электровозов и тепловозов с асинхронными двигателями, частота вращения которых регулируется путем изменения частоты питающего напряжения. Такой способ регулирования частоты вращения ротора асинхронного двигателя является весьма перспективным.
Такой способ регулирования частоты вращения ротора асинхронного двигателя является весьма перспективным.
Регулирование путем изменения числа пар полюсов. Этот способ позволяет получить ступенчатое изменение частоты вращения. Для этой цели отдельные катушки 1, 2 и 3, 4, составляющие одну фазу (рис. 266), переключаются так, чтобы изменялось соответствующим образом направление тока в них (например, с последовательного согласного соединения на встречное). При согласном включении катушек (рис. 266, а) число полюсов равно четырем, при встречном включении (рис. 266, б) — двум. Катушки двух других фаз, сдвинутые в пространстве на 120°, соединяются таким же образом. Такое же уменьшение числа полюсов можно осуществить при переключении катушек с последовательного на параллельное соединение. При изменении числа полюсов изменяется частота вращения n1 магнитного поля двигателя, а следовательно, и частота вращения n его ротора. Если нужно иметь три или четыре частоты вращения n1, то на статоре располагают еще одну обмотку, при переключении которой можно получить еще две частоты. Существуют двигатели, которые обеспечивают изменение частоты вращения n1 при постоянном наибольшем моменте или при приблизительно постоянной мощности (рис. 267).
Существуют двигатели, которые обеспечивают изменение частоты вращения n1 при постоянном наибольшем моменте или при приблизительно постоянной мощности (рис. 267).
В асинхронном двигателе число полюсов ротора должно быть равно числу полюсов статора. В короткозамкнутом роторе это условие выполняется автоматически и при переключении обмотки статора никаких изменений в обмотке ротора выполнять не требуется.
Рис. 267. Механические характеристики двухскоростных асинхронных двигателей с постоянным наибольшим моментом (а) и постоянной мощностью (б)
Рис. 268. Механические характеристики асинхронного двигателя при регулировании частоты вращения путем включения реостата в цепь обмотки ротора
Рис. 269. Схемы подключения асинхронного двигателя к сети при изменении направления его вращения
В двигателе же с фазным ротором в этом случае надо было бы изменять число полюсов обмотки ротора, что сильно усложнило бы его конструкцию, поэтому такой способ регулирования частоты вращения используется только в двигателях с коротко-замкнутым ротором. Такие двигатели имеют большие габаритные размеры и массу по сравнению с двигателями общего применения, а следовательно, и большую стоимость. Кроме того, регулирование осуществляется большими ступенями; при частоте f1 = 50 Гц частота вращения поля n1 при переключениях изменяется в отношении 3000:1500:1000:750.
Такие двигатели имеют большие габаритные размеры и массу по сравнению с двигателями общего применения, а следовательно, и большую стоимость. Кроме того, регулирование осуществляется большими ступенями; при частоте f1 = 50 Гц частота вращения поля n1 при переключениях изменяется в отношении 3000:1500:1000:750.
Регулирование путем включения в цепь ротора реостата. При включении в цепь обмотки ротора реостата с различным сопротивлением (Rп4, RпЗ, Rп2 и т. д.) получаем ряд реостатных механических характеристик 4, 3 и 2 двигателя. При этом некоторому нагрузочному моменту Мном (рис. 268) будут соответствовать меньшие частоты вращения n4, n3, n2 и т. д., чем частота nе при работе двигателя на естественной характеристике 1 (при Rп = 0). Это способ регулирования может быть использован только для двигателей с фазным ротором. Он позволяет плавно изменять частоту вращения в широких пределах. Недостатками его являются большие потери энергии в регулировочном реостате, поэтому его используют только при кратковременных режимах работы двигателя (при пуске и пр.).
Недостатками его являются большие потери энергии в регулировочном реостате, поэтому его используют только при кратковременных режимах работы двигателя (при пуске и пр.).
Изменение направления вращения. Для изменения направления вращения двигателя нужно изменить направление вращения магнитного поля, создаваемого обмотками статора. Это достигается изменением порядка чередования тока в фазах обмотки статора. Например, если максимумы токов поступают в фазы обмотки статора 1 (рис. 269, а) в следующем порядке: фаза А — фаза В — фаза С, то ротор 2 двигателя будет вращаться по часовой стрелке. Если же подавать их в такой последовательности: фаза В — фаза А — фаза С, то ротор начнет вращаться против часовой стрелки. Для этой цели необходимо изменить схему соединения обмоток статора с сетью, переключив две любые фазы (провода). Например, зажим А обмотки статора, который ранее был соединен с линейным проводом Л1, нужно переключить на провод Л2, а зажим В этой обмотки, соединенный ранее с Л2, переключить на провод Л1 (рис. 269,б). Такое переключение можно осуществить обычным переключателем.
269,б). Такое переключение можно осуществить обычным переключателем.
Ответы ЭМ
АСИНХРОННЫЕ МАШИНЫ
Единица измерения и определяющая формула электрического сопротивления
Ом, R = U / I
Единица измерения и определяющая формула электрической проводимости
Сименс, G = 1 / R
Единица измерения и определяющая формула электрической емкости
Фарада, C = q / U
Единица измерения и определяющая формула магнитного потока
Вебер, Ф = q * R
Единица измерения и определяющая формула магнитной индукции.
Тесла, B = Ф / S
Единица измерения и определяющая формула намагничивающей силы.

Ампер-виток, F = W * I
Выберите правильную формулу для угловой частоты вращения магнитного потока статора.
Выберите правильную упрощенную формулу критического скольжения асинхронной машины.
R ‘2
S к ± —————–
X1 + X ‘2
Во сколько раз уменьшится пусковой ток трехфазного асинхронного двигателя при соединении фаз в звезду вместо треугольника?
В раз
Выберите правильную упрощенную формулу электромагнитного момента асинхронной машины.
Мэм = Рэм /
Выберите правильную формулу для скольжения S.
S = (n1 – n) / n1
Выберите правильную формулу для частоты вращения магнитного потока статора.

n1 = 60 f / p
Почему пусковой момент асинхронного двигателя при введении реостата в фазный ротор увеличивается?
Увеличивается активное сопротивление ротора.
14 Почему номинальный момент асинхронного двигателя при введении реостата в фазный ротор уменьшается при том же скольжении?
+Уменьшается активная составляющая роторного тока
Что нужно сделать, чтобы изменить направление вращения трехфазного асинхронного двигателя с фазным ротором?
Поменять местами два линейных провода двигателя на клеммах трехфазной сети.
Выберите правильную формулу электромагнитной мощности асинхронной машины.
РЭМ = РЭЛ 2 / S
Почему электрическая машина называется асинхронной?
n1 ≠ n
Роторная обмотка короткозамкнутого ротора общепромышленного асинхронного двигателя может быть изготовлена из:
алюминиевого
сплава.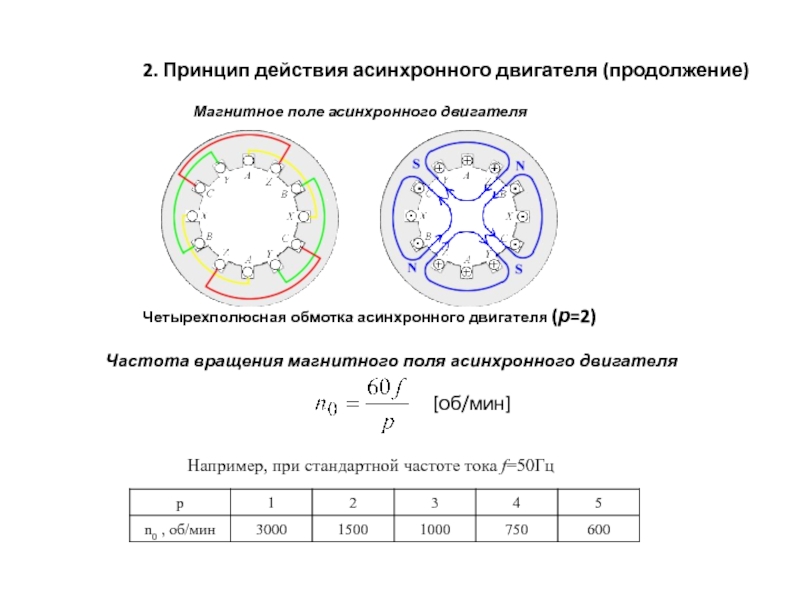
Выберите правильную формулу электромагнитной мощности асинхронной машины.
РЭМ = m1 I122 R12 / S
Выберите правильную формулу полной механической мощности асинхронной машины.
РМХ= m1 I122 R12 (1-S) / S
Фазы ротора трехфазного асинхронного двигателя включают:
Звездой.
Выберите правильную формулу мощности на валу асинхронного двигателя.
Р2 = М2 2n / 60
Выберите правильную формулу для потребляемой активной мощности трехфазного асинхронного двигателя.
P1 = m1 U1 I1 cosϕ1
Какие условия необходимы для образования вращающегося кругового магнитного потока в двухфазном статоре асинхронного двигателя?
Равенство
МДС фаз, пространственный сдвиг фаз на
120 электрических градусов, временной
сдвиг токов фаз на 1/3 периода.
Какая величина называется перегрузочной способностью асинхронного двигателя?
λ = МК / МН
Сумма мощности потерь асинхронного двигателя ΣР составляет 50% от его полезной мощности Р2. Определить КПД асинхронного двигателя η.
η=67%.
27 Номинальная частота работы асинхронного двигателя с короткозамкнутым ротором, питающегося от промышленной сети переменного тока, n2=950 об/мин. Определить число пар полюсов p статорной обмотки данного двигателя и величину номинального скольжения Sн.
+p = 3, Sн= 0,05.
Асинхронный двигатель с числом пар полюсов р = 1, критическим скольжением Sк = 0,2 работает от промышленной сети переменного тока с нагрузкой на валу со скольжением S1 = 0,1. Определить частоту вращения ротора n2, если нагрузка на валу уменьшилась в 2 раза.
 Двигатель считать идеальным.
Двигатель считать идеальным.
n2 = 2700 об/мин.
n2 = 5400 об/мин.
n2 = 2875 об/мин.
n2 = 3000 об/мин.
n2 = 125 об/мин.
Определить КПД η трехфазного асинхронного двигателя в номинальном режиме, если постоянные потери Р0=15мВт, переменные Рса=35 мВт, а потребляемая из сети мощность Р1=250 мВт.
η = 0,80
Три одинаковых асинхронных двигателя имеют различное номинальное скольжение: Sн1=0,08, Sн2=0,04 и Sн3=0,06. Определить в каком соотношении находятся их КПД η1, η2, η3.
η2 > η3 > η1.
Трехфазный асинхронный двигатель подключен к сети переменного тока с фазным напряжением U1 = 220 В. При номинальной нагрузке активная мощность, потребляемая двигателем из сети Р1 = 250 Вт, а фазный ток при этом равен I1 =0,5 А. Определить cosϕ двигателя при номинальной нагрузке.
.
cosϕ
≈ 0,76.
По каким внешним признакам можно определить асинхронный двигатель с фазным ротором?
На валу расположены три контактных кольца.
Чему равно скольжение двигателя при пуске?
Единице.
При каких условиях однофазный асинхронный двигатель имеет пусковой момент?
При наличии пространственного сдвига обмоток фазы и при наличии временного сдвига между токами обмоток.
С какой целью поверхность станины асинхронного двигателя может выполняться оребренной?
С целью обеспечения необходимой поверхности охлаждения.
В каком режиме работает асинхронная машина, если ее скольжение имеет отрицательное значение?
Генераторный.
Почему КПД двигателя всегда меньше 1?
Имеются активные потери мощности.
Какие потери в асинхронном двигателе называют переменными?
Электрические
потери в статорной и роторной обмотках.
Почему магнитопровод статора двигателя выполняют из листовой электротехнической стали?
Пакет статора выполняют из листов электротехнической стали для уменьшения потерь на вихревые токи.
С какой целью в цепь обмотки фазного ротора вводят добавочное активное сопротивление?
Для уменьшения начального пускового тока и увеличения начального пускового момента.
Когда КПД двигателя становится максимальным?
Когда переменные потери становятся равными постоянным.
При каком скольжении будет максимальный момент двигателя?
При критическом скольжении.
Что представляет собой обмотка ротора асинхронного двигателя с короткозамкнутым ротором?
Обмотка ротора выполняется по типу беличьей клетки.
Какое магнитное поле создается при питании одной фазы переменным током?
Пульсирующее.
Назовите способы регулирования частоты вращения асинхронного двигателя с короткозамкнутым ротором?
Изменением числа полюсов обмотки статора, скольжения (изменением величины напряжения питания), частоты и напряжения питания.
.
Какие потери в асинхронном двигателе называют постоянными?
Сумма потерь в стали и механических.
Что понимают под режимом холостого хода двигателя?
Когда на валу отсутствует тормозной момент.
Что представляет собой обмотка ротора асинхронного двигателя с фазным ротором?
Роторная обмотка двигателя с фазным ротором выполняется трехфазной по типу статорной.
При каких условиях m-фазная обмотка создает вращающееся магнитное поле?
Любая m-фазная
обмотка создает вращающееся магнитное
поле, если сдвиг фаз в пространстве и
токов во времени составляет 2/т.
Перечислите все способы пуска асинхронных двигателей.
Прямой; при пониженном напряжении; введением добавочного активного сопротивления в цепь ротора; введением добавочного активного сопротивления в цепь статора; частотный.
Что понимают под режимом короткого замыкания двигателя?
Работа при заторможенном роторе.
Чему равна частота тока в роторной обмотке, когда ротор заторможен?
Частоте тока обмотки статора.
Укажите схему включения обмоток асинхронного двигателя, если линейное напряжение в сети 220 В.
/ Y
Укажите электротехнические материалы, применяемые в электрических машинах.
Проводниковые, магнитные, изоляционные, материалы щеток.
Какова классификация электрических машин по назначению?
Электромашинные
генераторы, электрические двигатели,
электромашинные преобразователи,
электромашинные компенсаторы,
электромашинные усилители,
электромеханические преобразователи
сигналов.
.
Какова классификация электрических машин по роду тока и принципу действия?
Трансформаторы, асинхронные машины, синхронные машины, коллекторные машины, машины постоянного тока.
Каков принцип создания вращающегося магнитного поля в асинхронных двигателях?
Распределение многофазных обмоток в пространстве, питание обмоток многофазными токами, имеющими сдвиг во времени.
Каковы способы регулирования частоты вращения асинхронных двигателей?
Частотный, изменением числа пар полюсов, изменением питающего напряжения, введением добавочных сопротивлений или ЭДС в цепь фазного ротора.
Как изменятся КПД и коэффициент мощности асинхронного двигателя при а) повышении напряжения б)понижении напряжения в сети?
а) КПД и Cos уменьшаются, б) КПД и Cos увеличиваются.
Как изменить направление вращения асинхронного двигателя?
Пересоединением
к сети двух любых фаз обмотки статора.
Укажите формулы а)скольжения и б)частоты вращения асинхронного двигателя.
а) S = (n1 – n) / n1; б) n = 60 f1 / p.
Как и во сколько раз изменится вращающий момент асинхронного двигателя при переключении обмотки статора «со звезды на треугольник»?
Увеличится в 3 раза.
Определить число полюсов в обмотке статора асинхронного двигателя, если магнитное поле вращается со скоростью 1000 об/ мин.
2 р = 6.
Как изменится частота тока в роторе асинхронного двигателя при увеличении частоты вращения?
Уменьшится.
65 Какому из сопротивлений Rд1< Rд2< Rд3< Rд4 в двигателе с фазным ротором соответствует наименьший пусковой момент?
+МП при Rд1 в цепи фазного ротора.
.
Асинхронный двигатель называется асинхронным из-за несовпадения скоростей вращения:
ротора и магнитного поля статора;
Если номинальная частота вращения асинхронного двигателя nном = 1420 об/мин, то частота вращения магнитного поля составляет:
1500 об/мин;
Двигатель с фазным ротором отличается от двигателя с короткозамкнутым ротором:
наличием контактных колец и щеток;
Направление вращения магнитного поля асинхронного двигателя зависит от:
порядка чередования фаз обмотки статора;
Максимальная частота вращения магнитного поля асинхронного двигателя при промышленной частоте 50 Гц составляет:
3000 об/мин.
Для создания вращающегося магнитного поля асинхронного двигателя необходимы следующие условия:
пространственный сдвиг трех фаз обмотки статора и фазовый сдвиг переменных токов в них;
Механическая характеристика асинхронного двигателя имеет вид:
б)
Укажите неверное утверждение:
существует три основных типа вращающихся машин переменного тока: синхронные,
74 Для создания кругового вращающегося магнитного поля в двухполюсной машине переменного тока необходимо обеспечить пространственный сдвиг между осями обмоток (геометрических градусов) и фазовый сдвиг между токами обмоток (электрических градусов):
???на 120 геометрических градусов и 180 электрических градусов;
Если f – частота питающей сети (1/с), а p – число пар полюсов, то скорость вращения магнитного поля n1 (об/мин) определяется:
Если n1 – скорость вращения поля статора, а n2– скорость вращения ротора, то скольжение асинхронного двигателя s определяется:
.
При работе асинхронной машины в режиме двигателя скольжение изменяется в пределах:
0…1;
При номинальном режиме работы асинхронного двигателя скольжение может составлять величину:
s = 0, 2…0,5;
Чему равна механическая мощность в асинхронном двигателе при неподвижном роторе (s = 1)?
Рмех = 0.
80 Перегрузочная способность асинхронного двигателя определяется как:
+отношение максимального момента к номинальному;.
Что является вращающейся частью в асинхронном двигателе?
Ротор.
В трёхфазную сеть с линейным напряжением 380 В включают трёхфазный двигатель, каждая из обмоток которого рассчитана на 220 В. Как следует соединить обмотки двигателя?
Звездой.
При регулировании частоты вращения магнитного поля n1 асинхронного двигателя были получены следующие величины: 1500; 1000; 750 об/мин. Каким способом осуществлялось регулирование частоты вращения?
.
Реостатное регулирование.
В каких единицах выражается реактивная мощность потребителей?
Вар.
Определить скольжение трехфазного асинхронного двигателя, если известно, что частота вращения ротора n отстает от частоты магнитного поля n1 на 50 об/ мин (n1=1000 об/ мин).
s = 0,05.
Укажите основной недостаток асинхронного двигателя.
Отсутствие дешевых и экономичных устройств для плавного регулирования частоты вращения ротора.
Частота вращения магнитного поля асинхронного двигателя n1=1500об/мин, частота вращения ротора n=1470об/мин. Определить скольжение s.
s = 0,02.
В симметричном трехфазном асинхронном двигателе линейное напряжение Uл = 220 В, линейный ток Ιл = 5А, коэффициент мощности cosφ = 0,8. Определить активную мощность.
Р = 1524 Вт.
С какой целью асинхронный двигатель с фазным ротором снабжают контактными кольцами и щетками?
Для соединения ротора с регулировочным реостатом.
Чему равен КПД асинхронного двигателя, работающего в режиме холостого хода?
0.
90%.
10%
Для ответа на вопрос недостаточно данных.
Для преобразования какой энергии предназначены асинхронные двигатели?
Электрической энергии в механическую.
92 Как называется основная характеристика асинхронного двигателя?
+Механическая характеристика…
Как изменится ток в обмотке ротора асинхронного двигателя при увеличении механической нагрузки на валу?
Увеличится.
Как изменить направление вращения магнитного поля статора асинхронного трёхфазного двигателя?
Достаточно изменить порядок чередования двух фаз из трёх.
Определить частоту вращения магнитного поля ротора n2с асинхронного короткозамкнутого двигателя относительно магнитопровода статора, если число пар полюсов p = 1, частота изменения тока f1 = 50 Гц скольжение S = 0,02.
n2c = 3000 об/мин .
Определить частоту вращения магнитного поля ротора n2р асинхронного короткозамкнутого двигателя относительно магнитопровода ротора, если число пар полюсов p = 1, частота изменения тока f1 = 50 Гц, скольжение S = 0,02.
n2р = 3000 об/мин .
Электромагнитный момент асинхронного двигателя пропорционален…
напряжению обмотки статора в квадрате.
Режим работы электродвигателя, при котором скорость вращения вала равна нулю, и электрическая энергия, поступающая из сети, рассеивается в виде тепла в резисторной цепи называется
режимом короткого замыкания.
Укажите механическую характеристику асинхронного двигателя.
Mэм = f ( S ).
Скорость вращения магнитного поля статора 1500 об/мин, скольжение двигателя 5%. Определите скорость вращения вала ротора.
1425 об / мин.
Какое регулирование скорости вращения асинхронных двигателей позволяет получить скорость вращения выше номинальной?
Частотное.
При каком способе регулирования скорости вращения АД критический момент не изменяется?
При регулировании напряжением.
Укажите правильный ответ. Электротехническая сталь для изготовления сердечников современных асинхронных двигателей:
холоднокатаная анизотропная
Укажите неправильный ответ. Обмотка статора асинхронного двигателя может быть:
комбинированной
Укажите правильный ответ. Обмотки статора асинхронного двигателя соединены:
а б
а – треугольником; б – звездой
Укажите неправильный ответ. Скос пазов на роторе:
увеличивает ЭДС ротора
Укажите неправильный ответ. Асинхронный двигатель с фазным ротором имеет в конструкции:
пусковую обмотку
Укажите правильный ответ. Магнитный поток, созданный трехфазной обмоткой статора изменяется:
по направлению
Укажите правильный ответ. Скольжение S% асинхронного двигателя при частоте вращения магнитного поля n1=3000 об/мин и частоте вращения ротора n= 2940 об/мин:
2%
Укажите правильный ответ. Частота вращения ротора n (об/мин) при скольжении S= 5 %, числе пар полюсов р=2 и частоте питающей сети f1=50 Гц:
1425
Укажите правильный ответ. Скольжение асинхронного двигателя при увеличении нагрузки на валу:
увеличится
112 Укажите правильный ответ. Активное r2s и индуктивное Х2s сопротивления обмотки ротора при скольжении S=5%, если при неподвижном роторе r2= 1 Ом, Х2= 2 Ома:
r2s=0,05 Х2s=0,
113 Укажите правильный ответ. ЭДС в роторе асинхронного двигателя е2s при работе со скольжением S=4%, если при неподвижном роторе е2=20В:
+е2s= 0,8
Укажите правильный ответ. Частота тока в роторе f2 асинхронного двигателя при скольжении S=4% и частоте питающей сети f1= 50 Гц:
f2= 2 Гц
Укажите правильный ответ. Формула для частоты вращения ротора n асинхронного двигателя:
n=n1(1-S)
Укажите правильный ответ. Потребляемая двигателем мощность P1 Вт, при полезной P2= 400 Вт и КПД η=0,8:
500
Укажите правильный ответ. Электрические потери в обмотке ротора рэл Вт, если электромагнитная мощность P эм=700 Вт, скольжение S=4%:
28
Укажите правильный ответ. Скольжение двигателя S%, если электромагнитная мощность Pэм=500 Вт, а полная механическая мощность Рмх=470 Вт:
недостаточно данных для ответа
Укажите правильный ответ. КПД двигателя % при полезной мощности на валу Р2=350 Вт и суммарных потерях в двигателе Σр=150 Вт:
70
Укажите правильный ответ. Потребляемая из сети активная мощность P1 кВт по паспортным данным трехфазного асинхронного двигателя: статор Δ/Y – 220/380 В; I= 6,6/3,8 А; cosφ= 0,75:
1,08
1,88
3,26
5,6
Укажите правильный ответ. Вращающий момент асинхронного двигателя при увеличении подведенного напряжения в 2 раза:
увеличится в 4 раза
Укажите правильный ответ. Вращающий момент асинхронного двигателя при увеличении скольжения от 0 до 1:
сначала увеличивается, потом уменьшается
Укажите правильный ответ. Вращающий момент М Н·м асинхронного двигателя при полезной мощности P2= 5,8 кВт и частоте вращения ротора n=2900 об/мин:
19,1
Укажите правильный ответ. Величины, поддерживаемые постоянными при определении рабочих характеристик:
питающее напряжение и частота
Укажите правильный ответ. Ток холостого хода I0 и коэффициент мощности cosφ0 асинхронного двигателя при увеличении воздушного зазора:
I0 увеличивается, cosφ0 уменьшается
Укажите правильный ответ. Коэффициент мощности асинхронного двигателя cosφ c ростом нагрузки выше номинальной:
уменьшается
Укажите правильный ответ. Скольжение S и частота вращения ротора n при увеличении нагрузки на валу:
S – увеличивается, n – уменьшается
Укажите правильный ответ. Коэффициент мощности трехфазного асинхронного двигателя при полезной мощности P2= 40 кВт, фазном напряжении 220 В, фазном токе 78 А и КПД η= 0,89:
0,87
Определите правильный ответ. Кратность пускового момента:
отношение пускового момента к номинальному
Определите правильный ответ. Кратность пускового тока:
отношение пускового тока к номинальному
Определите правильный ответ. Диапазон кратности пускового момента для короткозамкнутых двигателей мощностью 0,6 – 100 кВт:
4,5 – 7,5
Определите правильный ответ. Изменение пускового момента при пуске переключением «звезда – треугольник»:
уменьшение в раз
Определите правильный ответ. Изменение пускового момента при пуске с помощью автотрансформатора с коэффициентом трансформации к:
уменьшение в к2 раз
Определите правильный ответ. Снижение начального пускового тока в питающей сети при пуске переключением «звезда – треугольник»
в 3 раза
Определите правильный ответ. Изменение частоты тока частотного регулирования скорости при постоянстве мощности на валу двигателя и увеличение f1 в 1,73 раза
Определите правильный ответ. Изменение напряжения частотного регулирования скорости при вентиляторной нагрузке и уменьшении вдвое частоты вращения ротора
уменьшение U1 в 4 раза
Определите правильный ответ. Изменение напряжения частотного регулирования скорости при постоянстве момента на валу при увеличении в 1,73 раза частоты вращения ротора:
увеличение U1 в 1,73 раза
Изменение частоты вращения поля и максимального момента при переключении обмотки статора с треугольника на двойную звезду четырехполюсного двигателя:
n1 YY= 3000 об/мин; Мm YY= 0,575 Мm Δ
n1 YY= 3000 об/мин; Мm YY= Мm Δ/0,575
n1 YY= 750 об/мин; Мm YY= 0,575 Мm Δ
n1 YY= 750 об/мин; Мm YY= Мm Δ
Определите правильный ответ. Изменение частоты вращения поля и максимального момента при переключении обмотки статора с двойной звезды на одинарную звезду восьмиполюсного двигателя:
n1 Y= 1500 об/мин; Мm Y= Мm YY
n1 Y= 375 об/мин; Мm Y= 2Мm YY
n1 Y= 375 об/мин; Мm Y= Мm YY
n1 Y= 1500 об/мин; Мm Y= Мm YY/2
Укажите правильный ответ. Величина критического скольжения Sкр на графике М(S) асинхронного двигателя…
пропорционально R2’
Частота вращения магнитного поля асинхронного двигателя 1000 об/мин. Частота вращения ротора 950 об/мин. Определить скольжение.
0,05
Какой из способов регулирования частоты вращения ротора асинхронного двигателя самый экономичный?
Регулирование измерением числа пар полюсов
С какой целью при пуске в цепь обмотки фазного ротора асинхронного двигателя вводят дополнительное сопротивление?
Для получения максимального начального пускового момента.
Определите частоту вращения магнитного поля статора асинхронного короткозамкнутого двигателя, если число пар полюсов равна 1, а частота тока 50 Гц.
3000 об/мин
Как изменить направление вращения магнитного поля статора асинхронного трехфазного двигателя?
Достаточно изменить порядок чередования двух фаз из трёх
Какую максимальную частоту вращения имеет вращающееся магнитное поле асинхронного двигателя при частоте переменного тока 50 Гц?
3000 об/мин
Перегрузочная способность асинхронного двигателя определяется так:
Отношение максимального момента к номинальному
Чему равна механическая мощность в асинхронном двигателе при неподвижном роторе? (S=1)
P=0
Почему магнитопровод статора асинхронного двигателя набирают из изолированных листов электротехнической стали?
Для уменьшения потерь на вихревые токи
Методы регулирования скорости асинхронного двигателя
Асинхронный двигатель практически представляет собой двигатель с постоянной скоростью, что означает, что для всего диапазона нагрузки изменение скорости двигателя довольно мало. Скорость параллельного двигателя постоянного тока можно очень легко изменять с хорошим КПД, но в случае асинхронных двигателей снижение скорости сопровождается соответствующей потерей эффективности и низким коэффициентом мощности. Поскольку асинхронные двигатели широко используются, регулирование их скорости может потребоваться во многих приложениях. Различные методы управления скоростью асинхронного двигателя объясняются ниже.Регулировка скорости асинхронного двигателя со стороны статора
1. Путем изменения подаваемого напряжения:
Из уравнения крутящего момента асинхронного двигателя,Сопротивление ротора R 2 постоянно, и если скольжение s мало, то (sX 2 ) 2 настолько мало, что им можно пренебречь. Следовательно, T ∝ sE 2 2 , где E 2 – ЭДС, индуцированная ротором, а E 2 ∝ V
. Таким образом, T ∝ sV 2 , что означает, что если подаваемое напряжение уменьшается, развиваемый крутящий момент уменьшается.Следовательно, для обеспечения того же момента нагрузки скольжение увеличивается с уменьшением напряжения, и, следовательно, скорость уменьшается. Этот метод самый простой и дешевый, но до сих пор используется редко, потому что для относительно небольшого изменения скорости требуется большое изменение напряжения питания.
2. Изменяя применяемую частоту
Синхронная скорость вращающегося магнитного поля асинхронного двигателя определяется выражением,. где f = частота питания и P = количество полюсов статора.
Следовательно, синхронная скорость изменяется с изменением частоты питания. Фактическая скорость асинхронного двигателя определяется как N = Ns (1 – s) . Однако этот метод не получил широкого распространения. Его можно использовать там, где асинхронный двигатель питается от специального генератора (так что частоту можно легко изменять, изменяя скорость первичного двигателя). Кроме того, при более низкой частоте ток двигателя может стать слишком большим из-за пониженного реактивного сопротивления. А если частота превышает номинальное значение, максимальный развиваемый крутящий момент падает, а скорость увеличивается.
3. Постоянное регулирование U / F асинхронного двигателя
Это самый популярный метод управления скоростью асинхронного двигателя. Как и в описанном выше методе, если частота питания снижается при сохранении номинального напряжения питания, поток в воздушном зазоре стремится к насыщению. Это вызовет чрезмерный ток статора и искажение магнитной волны статора. Следовательно, напряжение статора также должно быть уменьшено пропорционально частоте, чтобы поддерживать постоянный магнитный поток в воздушном зазоре. Величина потока статора пропорциональна отношению напряжения статора к частоте.Следовательно, если отношение напряжения к частоте остается постоянным, магнитный поток остается постоянным. Кроме того, при поддержании постоянного V / F развиваемый крутящий момент остается приблизительно постоянным. Этот метод дает более высокую эффективность во время выполнения. Поэтому в большинстве приводов переменного тока для управления скоростью используется метод постоянного напряжения / частоты (или метод переменного напряжения и переменной частоты). Наряду с широким диапазоном регулирования скорости, этот метод также предлагает возможность «плавного пуска».4. Изменение количества полюсов статора
Из приведенного выше уравнения синхронной скорости можно увидеть, что синхронная скорость (и, следовательно, скорость движения) может быть изменена путем изменения количества полюсов статора.Этот метод обычно используется для асинхронных двигателей с короткозамкнутым ротором, поскольку ротор с короткозамкнутым ротором адаптируется к любому количеству полюсов статора. Смена полюсов статора достигается двумя или более независимыми обмотками статора, намотанными на разное количество полюсов в одинаковых пазах.Например, статор намотан с двумя 3-фазными обмотками, одна на 4 полюса, а другая на 6 полюсов.
для частоты питания 50 Гц
i) синхронная скорость при подключении 4-х полюсной обмотки, Ns = 120 * 50/4 = 1500 об / мин
ii) синхронная скорость при подключении 6-полюсной обмотки, Ns = 120 * 50/6 = 1000 об / мин
Регулировка скорости со стороны ротора:
1.Регулировка реостата ротора
Этот метод аналогичен управлению реостатом якоря параллельного двигателя постоянного тока. Но этот метод применим только к электродвигателям с фазным ротором, так как добавление внешнего сопротивления в ротор электродвигателей с короткозамкнутым ротором невозможно.2. Каскадный режим
В этом методе регулирования скорости используются два двигателя. Оба установлены на одном валу, поэтому оба работают с одинаковой скоростью. Один двигатель питается от трехфазного источника питания, а другой двигатель получает питание от наведенной ЭДС в первом двигателе через контактные кольца.Расположение показано на следующем рисунке.Двигатель A называется основным двигателем, а двигатель B – вспомогательным двигателем.
Пусть, N с1 = частота двигателя A
N с2 = частота двигателя B
P 1 = количество полюсов статора двигателя A
P 2 = количество полюсов статора двигателя B
N = скорость установки и одинаковая для обоих двигателей
f = частота питания
Теперь скольжение двигателя A, S 1 = (N s1 – N) / N s1 .
частота ЭДС, индуцированная ротором в двигателе A, f 1 = S 1 f
Теперь на вспомогательный двигатель B подается ЭДС индукции ротора
, следовательно, N s2 = (120f 1 ) / P 2 = (120S 1 f) / P 2 .
теперь ставим значение S 1 = (N s1 – N) / N s1
я.е. N = N с2 .
из приведенных выше уравнений можно получить, что
С помощью этого метода можно получить четыре различных скорости
1. когда работает только двигатель A, соответствующая скорость = .Ns1 = 120f / P 1
2. когда работает только двигатель B, соответствующая скорость = Ns2 = 120f / P 2
3. если выполнено коммутационное каскадирование, скорость набора = N = 120f / (P 1 + P 2 )
4. Если выполняется дифференциальное каскадирование, скорость установки = N = 120f (P 1 – P 2 )
3.Путем подачи ЭДС в цепь ротора
В этом методе скорость асинхронного двигателя регулируется путем подачи напряжения в цепь ротора. Необходимо, чтобы подаваемое напряжение (ЭДС) имело ту же частоту, что и частота скольжения. Однако ограничений по фазе вводимой ЭДС нет. Если мы подаем ЭДС, которая находится в противофазе с ЭДС, индуцированной ротором, сопротивление ротора будет увеличиваться. Если мы введем ЭДС, которая находится в фазе с ЭДС, индуцированной ротором, сопротивление ротора уменьшится.Таким образом, изменяя фазу инжектируемой ЭДС, можно управлять скоростью. Основным преимуществом этого метода является широкий диапазон регулирования скорости (как выше нормы, так и ниже нормы). ЭДС может быть введена различными методами, такими как система Крамера, система Шербиуса и т. Д.Что определяет скорость вращения двигателя?
Электродвигатели отличаются своим разнообразием и широким диапазоном типоразмеров. Существуют двигатели с дробной мощностью (л.с.) для небольших бытовых приборов и двигатели мощностью в тысячи л.с. для тяжелого промышленного использования.Другие характеристики, указанные на паспортных табличках двигателей, включают их входное напряжение, номинальный ток, энергоэффективность и скорость в об / мин.
Скорость вращения электродвигателя зависит от двух факторов: его физической конструкции и частоты (Гц) источника питания. Инженеры-электрики выбирают скорость двигателя в зависимости от потребностей каждого приложения, подобно тому, как механическая нагрузка определяет требуемую мощность.
Убедитесь, что в вашем здании есть подходящий электродвигатель для каждого применения.
Как частота напряжения соотносится со скоростью двигателя
В зависимости от страны источник питания будет иметь частоту 60 Гц или 50 Гц. Хотя трехфазный двигатель будет вращаться с обоими входами мощности, возникнут проблемы с производительностью, если двигатель указан для одной частоты и будет использоваться с другой.
Поскольку источник напряжения 60 Гц переключает полярность на 20% быстрее, чем источник питания 50 Гц, двигатель, рассчитанный на 50 Гц, будет вращаться на 20% выше об / мин.Крутящий момент двигателя остается относительно постоянным, а более высокая скорость приводит к более высокой мощности на валу. Двигатель также выделяет больше тепла, но охлаждающий вентилятор также ускоряется вместе с валом, помогая отводить лишнее тепло. Двигатель также имеет тенденцию потреблять больше реактивного тока, что снижает его коэффициент мощности.
Подключение двигателя 60 Гц к источнику питания 50 Гц – более тонкий вопрос. Снижение скорости при том же напряжении может привести к насыщению магнитопровода двигателя, увеличению тока и перегреву агрегата.Самый простой способ предотвратить насыщение – снизить входное напряжение, и в идеале соотношение В / Гц должно оставаться постоянным:
- Двигатель 60 Гц, работающий при 50 Гц, имеет 83,3% номинальной частоты.
- Чтобы поддерживать постоянное соотношение В / Гц, входное напряжение также следует снизить до 83,3%.
- Если электродвигатель обычно работает при 240 В и 60 Гц, входное напряжение при 50 Гц должно быть 200 В, чтобы соотношение составляло 4 В / Гц.
Электропроводка двигателя и количество полюсов
Постоянный магнит имеет два полюса, но двигатели могут быть подключены так, чтобы их магнитное поле имело большее количество полюсов.Двухполюсный двигатель совершает полный оборот с одним изменением полярности, в то время как четырехполюсный двигатель вращается только на 180 ° с одним переключателем полярности. Чем больше полюсов, тем ниже скорость двигателя: если все остальные факторы равны, 4-полюсный электродвигатель будет вращаться со скоростью, вдвое меньшей, чем 2-полюсный электродвигатель.
- Источник питания 60 Гц меняет полярность 60 раз в секунду, а двухполюсный двигатель будет вращаться со скоростью 3600 об / мин при подключении к этому источнику. Четырехполюсный двигатель будет вращаться только со скоростью 1800 об / мин.
- Для двигателей с частотой 50 Гц скорость составляет 3000 об / мин с 2 полюсами и 1500 об / мин с 4 полюсами.
Эту концепцию можно резюмировать следующим уравнением:
Используя это уравнение, 4-полюсный двигатель с частотой 60 Гц имеет скорость 1800 об / мин, а 6-полюсный двигатель с частотой 50 Гц имеет скорость 1000 об / мин. Однако на самом деле это скорость магнитного поля, называемая синхронной скоростью, которая не всегда равна скорости вала.
- В синхронном двигателе , ротор использует постоянный магнит или электромагнит для вращения с расчетной скоростью.
- С другой стороны, асинхронный двигатель будет работать немного ниже расчетной скорости вращения. Так работает электромагнитная индукция, и ее не следует рассматривать как неисправность.
Если электродвигатель имеет паспортную скорость 1800 об / мин, можно сделать вывод, что это 4-полюсный синхронный двигатель, рассчитанный на 60 Гц. С другой стороны, если скорость на паспортной табличке имеет меньшее значение, например 1760 об / мин, это асинхронный двигатель.
Преобразователь частоты может управлять скоростью двигателя, регулируя входную частоту, как следует из его названия.VFD также может модулировать напряжение, чтобы поддерживать соотношение В / Гц ниже точки, в которой магнитный сердечник насыщен. Благодаря этой функции частотно-регулируемый привод не повреждает двигатель, даже если скорость снижается ниже значения, указанного на паспортной табличке. Основным недостатком частотно-регулируемых приводов являются гармонические искажения, поскольку они являются нелинейными нагрузками, но это можно компенсировать с помощью фильтров гармоник.
Привод с регулируемой скоростью: обзор асинхронного двигателя
Обзор индукционной машиныИндукционные машины имеют обмотку статора, подключенную к источнику переменного тока, и обмотку ротора.В зависимости от конструкции машины обмотка ротора может быть короткозамкнута, чтобы образуют клеточную обмотку или наматываются аналогично обмотке статора и соединяются с контактными кольцами. Машины с клетьевым ротором не имеют электрического соединения с ротором. Машины с фазным ротором могут иметь ротор с короткозамкнутым или подключенным к внешней цепи. Мы будем рассматривать только трехфазные индукционные машины в этом курсе, но теория машин и теория управления применимы к машины с другим количеством фаз.(В настоящее время ведутся исследования по производству 5, 9 или 15 фаз индукционные машины для использования с частотно-регулируемыми приводами).
Подробное описание принципов работу асинхронных машин можно найти в EE 332 Теория электрических машин.
Обмотка статора машины переменного тока производит вращающийся ммс, который вращается с синхронная скорость:
где ω с – синхронная скорость в радианах в секунду, а n с – синхронная скорость в оборотах в минуту (об / мин), p количество полюсов в машине.Если воздушный зазор между ротором и статором имеет одинаковую длину по окружности машины, результирующая волна плотности потока будет иметь ту же форму, что и волна ммс.
Когда волна плотности потока статора движется мимо проводников ротора, индуцируются напряжения и токи. в контуре ротора. Токи ротора создают вторую волну плотности потока, которая взаимодействует со статором. плотность потока для создания силы и крутящего момента.
Если ротор ускоряется до точки, в которой он вращается с той же скоростью, что и плотность магнитного потока статора, больше не будет видимого изменения магнитного потока в проводниках ротора, что приведет к нулевым наведенным напряжениям и токам и отсюда нулевой крутящий момент.Для создания крутящего момента ротор должен вращаться со скоростью, отличной от синхронной. Если внешняя механическая система приводит в движение ротор выше синхронной скорости, индукционная машина действует как генератор. Если ротор вращается со скоростью ниже синхронной, асинхронная машина является двигателем. Связь между скоростью ротора и Синхронная скорость определяется с использованием терминов скольжение и скорость скольжения.
Скольжение определяется как
, где в приведенных выше уравнениях ω м , n м являются механическими частота вращения ротора в радианах в секунду и об / мин соответственно, ω e – электрическое питание частота, в радианах в секунду, а ω r – это скорость ротора в электрических радианах в секунду и определяется как
Модель эквивалентной схемы
Если индукционная машина подключена к источнику с фиксированной частотой, стандартная модель эквивалентной схемы по фазе cam может использоваться для анализа производительности.Модель схемы, показанная ниже, основана на модели эквивалентной схемы для трансформатора, с переменным сопротивлением из-за скольжения.
На схеме выше R 1 , X 1 используются для обозначения сопротивления статора. и реактивное сопротивление соответственно. R 2 , X 2 используются для обозначения сопротивления ротора. и реактивное сопротивление соответственно, а X м используется для обозначения намагничивающего реактивного сопротивления.
Анализируя эквивалентную схему, можно найти мощность воздушного зазора и преобразователь мощности в механическая система:
Вычитая потери ротора из мощности воздушного зазора:
Для определения электромагнитного момента, развиваемого машиной (без учета механических потерь)
Крутящий момент – кривая скорости
Анализ эквивалентной схемы и вычисление крутящего момента, знакомая кривая крутящего момента / скорости для индукционного машины получено:
При эксплуатации асинхронной машины с приводом цель состоит в том, чтобы получить желаемый крутящий момент при заданном скорость.Обычно это включает работу в узком диапазоне по обе стороны от синхронной скорости (двигательная или генерирующая) и изменение частоты для перемещения синхронной скорости вверх и вниз по желанию.
Расчет параметров асинхронного двигателя
Испытание заблокированного ротора, как и испытание на короткое замыкание на трансформаторе, предоставляет информацию об импедансах утечки и сопротивлении ротора. Ротор неподвижен, а на обмотки статора подается низкое напряжение до номинального тока. В связи с тем, что индуктивность намагничивания L м намного выше, чем индуктивности фазы рассеяния L ls , L lr , можно предположить, что нет тока, плавающего на L м параллельной ветви.Обычно индуктивности рассеяния L ls , L lr должны составлять около 2-10% индуктивности намагничивания L m . Так как проскальзывание при вращении отсутствует (ротор остановлен) s = 1, что дает нам следующую эквивалентную схему.
Следовательно, параметры двигателя фазы L ls (H), L lr (H), R s (Ω), R r (Ω) рассчитываются следующим образом:
где P с (Вт) – входная фазная мощность двигателя, В с (В) – приложенное фазное напряжение статора (пиковое значение), f с (Гц) – частота статора, cosφ – мощность коэффициент, I (A) – ток двигателя (среднеквадратичное значение), Z (Ω) – эквивалентное полное сопротивление фазы при испытании заторможенного ротора.
Согласно уравнениям (7) и (8) предполагается, что сопротивление ротора равно сопротивлению статора, а также индуктивность рассеяния ротора равна индуктивности рассеяния статора.
Чтобы провести вышеупомянутый тест заторможенного ротора с контроллерами асинхронных двигателей, выполните следующие действия:
- Установите режим работы «Вольт на герц». Требуется действие обратной связи кодировщика.
- Сконфигурируйте настройку «Вольт на герц» в соответствии с пятикратным снижением номинального напряжения двигателя (пиковое значение напряжения статора согласно данным производителя) и частоты (1/5 номинального напряжения / частоты).Причина настройки более низкого отношения V / f, чем при испытании без нагрузки, состоит в том, чтобы соответствующим образом ослабить индуцированное поле и уменьшить создаваемый крутящий момент при запуске, чтобы упростить блокировку ротора во время испытания.
- Заблокируйте ротор с помощью соответствующего инструмента / устройства и увеличьте команду до 80% номинального тока двигателя. Если создаваемый крутящий момент высок и ротор не может быть заблокирован, уменьшите соответствующим образом значение Вольт на Герц в конфигурации и повторите тест.
- Рассчитайте применяемое V s , используя уравнение (2).
- Рассчитайте входную фазную мощность двигателя P s , используя следующее уравнение:
где V dc (V) – постоянное напряжение батареи, I dc (A) – постоянный ток батареи, η – постоянный ток батареи. КПД контроллера (предположим КПД 0,95 для контроллеров RoboteQ). Напряжение и ток батареи можно измерить с помощью утилиты Roborun +.
- Измерить ток I q (A) с помощью утилиты Roborun + (FOC Torque Amps).
- Рассчитайте параметры двигателя L ls , L lr , R s , R r , применив уравнения (3) – (8).
Пример:
Для того же асинхронного двигателя в примере испытания без нагрузки соотношение вольт на герц установлено в 5 раз ниже номинального, то есть 0,053. Соответствующие результаты, полученные с помощью утилиты Roborun +, показаны ниже:
Следовательно, входная фазная мощность двигателя P с равна
Коэффициент мощности
, а эквивалентное фазовое сопротивление Z = 0,081 Ом согласно уравнению (4).
Следовательно, сопротивления статора и ротора двигателя равны R с = R r = 24 мОм согласно уравнениям (5) и (7), а индуктивности рассеяния согласно уравнению (6) равны:
Следует отметить, что синхронная частота при испытании с заторможенным ротором отличается от синхронной частоты при испытании без нагрузки.Наконец, L ls = L lr = 76 мкГн согласно уравнению (8).
Синхронные двигатели | Двигатели переменного тока
Однофазные синхронные двигатели
Однофазные синхронные двигатели доступны в небольших размерах для приложений, требующих точного отсчета времени, таких как хронометраж, (часы) и магнитофоны. Хотя кварцевые часы с батарейным питанием широко доступны, часы с питанием от сети переменного тока имеют лучшую долгосрочную точность – в течение нескольких месяцев.
Это связано с тем, что операторы электростанции намеренно поддерживают долгосрочную точность частоты системы распределения переменного тока.Если он отстает на несколько циклов, они восполнят потерянные циклы переменного тока, так что часы не теряют время.
Сравнение больших и малых синхронных двигателей
Выше 10 лошадиных сил (10 кВт), более высокий КПД и ведущий коэффициент мощности делают большие синхронные двигатели полезными в промышленности. Большие синхронные двигатели на несколько процентов более эффективны, чем более распространенные асинхронные двигатели, хотя синхронный двигатель более сложен.
Поскольку двигатели и генераторы похожи по конструкции, должна быть возможность использовать генератор в качестве двигателя и, наоборот, использовать двигатель в качестве генератора.
Асинхронный двигатель подобен генератору переменного тока с вращающимся полем. На рисунке ниже показаны небольшие генераторы переменного тока с вращающимся полем постоянного магнита. На приведенном ниже рисунке могут быть изображены либо два параллельно синхронизированных генератора переменного тока, приводимых в действие механическими источниками энергии, либо генератор переменного тока, приводящий в действие синхронный двигатель. Или это могут быть два двигателя, если подключен внешний источник питания.
Дело в том, что в любом случае роторы должны работать с одинаковой номинальной частотой и находиться в фазе друг с другом.То есть их должно быть синхронизировано . Процедура синхронизации двух генераторов переменного тока заключается в следующем: (1) размыкание переключателя, (2) приведение в действие обоих генераторов с одинаковой скоростью вращения, (3) ускорение или замедление фазы одного блока до тех пор, пока оба выхода переменного тока не будут в фазе, (4) замыкание выключатель до того, как они сойдут по фазе.
После синхронизации генераторы переменного тока будут заблокированы друг с другом, что потребует значительного крутящего момента, чтобы отделить один блок (не синхронизированный) от другого.
Синхронный двигатель, работающий синхронно с генератором
Учет крутящего момента синхронных двигателей
Если больший крутящий момент в направлении вращения приложен к ротору одного из вышеупомянутых вращающихся генераторов переменного тока, угол ротора будет увеличиваться (противоположно (3)) по отношению к магнитному полю в катушках статора, пока все еще синхронизирован и ротор подает энергию в сеть переменного тока, как генератор переменного тока.
Ротор также будет выдвинут относительно ротора другого генератора. Если нагрузка, такая как тормоз, приложена к одному из вышеуказанных устройств, угол ротора будет отставать от поля статора, как в (3), извлекая энергию из линии переменного тока, как двигатель.
Если приложен чрезмерный крутящий момент или сопротивление, ротор превысит максимальный угол крутящего момента , продвигаясь или запаздывая настолько, что синхронизация будет потеряна. Крутящий момент развивается только при сохранении синхронизации двигателя.
Доведение синхронных двигателей до скорости
В случае использования небольшого синхронного двигателя вместо генератора переменного тока нет необходимости выполнять сложную процедуру синхронизации для генераторов переменного тока. Однако синхронный двигатель не запускается автоматически и должен быть доведен до приблизительной электрической скорости генератора переменного тока, прежде чем он синхронизируется с частотой вращения генератора.
После набора скорости синхронный двигатель будет поддерживать синхронизм с источником питания переменного тока и развивать крутящий момент.
Синхронный привод синхронного двигателя
Предполагая, что двигатель развивает синхронную скорость, когда синусоида меняется на положительную на рисунке выше (1), нижняя северная катушка толкает северный полюс ротора, а верхняя южная катушка притягивает северный полюс ротора. Подобным образом южный полюс ротора отталкивается верхней южной катушкой и притягивается к нижней северной катушке.
К тому времени, когда синусоида достигает пика в (2), крутящий момент, удерживающий северный полюс ротора вверх, является максимальным.Этот крутящий момент уменьшается по мере уменьшения синусоидальной волны до 0 В постоянного тока в точке (3) с минимальным крутящим моментом.
Когда синусоида меняется на отрицательную между (3 и 4), нижняя южная катушка толкает южный полюс ротора, притягивая северный полюс ротора. Подобным образом северный полюс ротора отталкивается верхней северной катушкой и притягивается к нижней южной катушке. В точке (4) синусоида достигает отрицательного пика с удерживающим моментом снова на максимуме. Когда синусоидальная волна изменяется с отрицательной на 0 В постоянного тока на положительную, процесс повторяется для нового цикла синусоидальной волны.
Обратите внимание, что на приведенном выше рисунке показано положение ротора в режиме холостого хода (α = 0 °). На практике загрузка ротора приведет к тому, что ротор будет отставать от положений, показанных углом α. Этот угол увеличивается с нагрузкой до тех пор, пока максимальный крутящий момент двигателя не будет достигнут при α = 90 °.
Синхронизация и крутящий момент теряются за пределами этого угла. Ток в катушках однофазного синхронного двигателя пульсирует с переменной полярностью.
Если скорость ротора постоянного магнита близка к частоте этого чередования, он синхронизируется с этим чередованием.Поскольку поле катушки пульсирует и не вращается, необходимо увеличить скорость ротора с постоянными магнитами с помощью вспомогательного двигателя. Это небольшой асинхронный двигатель, похожий на те, что описаны в следующем разделе.
Добавление полюсов снижает скорость
2-полюсный (пара полюсов N-S) генератор будет генерировать синусоидальную волну 60 Гц при вращении со скоростью 3600 об / мин (оборотов в минуту). 3600 об / мин соответствует 60 оборотам в секунду.Аналогичный двухполюсный синхронный двигатель с постоянными магнитами также будет вращаться со скоростью 3600 об / мин.
Двигатель с более низкой скоростью может быть сконструирован путем добавления большего количества пар полюсов. 4-полюсный двигатель будет вращаться со скоростью 1800 об / мин, 12-полюсный двигатель – со скоростью 600 об / мин. Показанный стиль конструкции (рисунок выше) предназначен для иллюстрации. Многополюсные синхронные двигатели со статором с более высоким КПД и большим крутящим моментом фактически имеют несколько полюсов в роторе.
Однообмоточный 12-полюсный синхронный двигатель
Вместо того, чтобы наматывать 12 катушек для 12-полюсного двигателя, намотайте одну катушку с двенадцатью соединенными штырями стальными полюсными частями, как показано на рисунке выше.Хотя полярность катушки меняется из-за приложенного переменного тока, предположим, что верхняя часть временно находится на севере, а нижняя – на юге.
Полюса направляют южный поток снизу и снаружи катушки вверх. Эти 6-ю южные части чередуются с 6-ю северными ушками, загнутыми вверх от верхней части стального полюса катушки. Таким образом, стержень ротора с постоянным магнитом столкнется с 6-полюсными парами, соответствующими 6-ти циклам переменного тока за одно физическое вращение стержневого магнита.
Скорость вращения будет 1/6 электрической скорости переменного тока.Скорость ротора будет 1/6 от скорости 2-полюсного синхронного двигателя. Пример: 60 Гц вращает 2-полюсный двигатель со скоростью 3600 об / мин или 600 об / мин для 12-полюсного двигателя.
Перепечатано с разрешения Westclox History на www.clockHistory.com
Статор (рисунок выше) показывает 12-полюсный синхронный часовой двигатель Westclox. Конструкция аналогична предыдущему рисунку с одной катушкой. Конструкция с одной обмоткой экономична для двигателей с низким крутящим моментом.Этот двигатель со скоростью 600 об / мин приводит в движение редукторы, перемещая стрелки часов.
Q: Если бы двигатель Westclox работал со скоростью 600 об / мин от источника питания 50 Гц, сколько полюсов потребовалось бы?
A: У 10-полюсного двигателя будет 5 пар полюсов N-S. Он будет вращаться со скоростью 50/5 = 10 оборотов в секунду или 600 об / мин (10 с-1 x 60 с / мин).
Перепечатано с разрешения Westclox History на www.clockHistory.com
Ротор (рисунок выше) состоит из стержня постоянного магнита и стальной чашки асинхронного двигателя.Шина синхронного двигателя, вращающаяся внутри полюсных лапок, сохраняет точное время. Чашка асинхронного двигателя снаружи стержневого магнита подходит снаружи и над язычками для самозапуска. Одно время выпускались несамозапускающиеся двигатели без чашки асинхронного двигателя.
Трехфазные синхронные двигатели
Трехфазный синхронный двигатель, показанный на рисунке ниже, создает электрически вращающееся поле в статоре. Такие двигатели не запускаются автоматически при запуске от источника питания с фиксированной частотой, например, 50 или 60 Гц, как в промышленных условиях.
Кроме того, ротор является не постоянным магнитом для двигателей мощностью несколько лошадиных сил (несколько киловатт), используемых в промышленности, а электромагнитом. Большие промышленные синхронные двигатели более эффективны, чем асинхронные двигатели. Они используются, когда требуется постоянная скорость. Обладая опережающим коэффициентом мощности, они могут корректировать линию переменного тока на отстающий коэффициент мощности.
Три фазы возбуждения статора складываются векторно, чтобы создать единое результирующее магнитное поле, которое вращается f / 2n раз в секунду, где f – частота линии электропередачи, 50 или 60 Гц для промышленных двигателей, работающих от линии электропередачи.Количество полюсов – n. Для числа оборотов ротора в об / мин умножьте на 60.
S = f120 / n где: S = частота вращения ротора в об / мин f = частота сети переменного тока n = количество полюсов на фазу
Трехфазный 4-полюсный (на фазу) синхронный двигатель будет вращаться со скоростью 1800 об / мин при мощности 60 Гц или 1500 об / мин при мощности 50 Гц. Если катушки запитываются по очереди в последовательности φ-1, φ-2, φ-3, ротор должен указывать на соответствующие полюса по очереди.
Поскольку синусоидальные волны фактически перекрываются, результирующее поле будет вращаться не ступенчато, а плавно.Например, когда синусоидальные волны φ-1 и φ-2 совпадают, поле будет на пике, указывающем между этими полюсами. Показанный ротор стержневого магнита подходит только для небольших двигателей.
Ротор с несколькими полюсами магнита (внизу справа) используется в любом эффективном двигателе, приводящем в движение значительную нагрузку. Это будут электромагниты с контактным кольцом в крупных промышленных двигателях. Крупные промышленные синхронные двигатели запускаются самостоятельно с помощью встроенных в якорь проводов с короткозамкнутым ротором, действующих как асинхронный двигатель.
Электромагнитный якорь возбуждается только после того, как ротор достигает почти синхронной скорости.
Трехфазный 4-полюсный синхронный двигатель
Малые многофазные синхронные двигатели
Малые многофазные синхронные двигатели могут быть запущены путем линейного увеличения частоты привода от нуля до конечной рабочей частоты. Многофазные управляющие сигналы генерируются электронными схемами и будут прямоугольными во всех приложениях, кроме самых требовательных.
Такие двигатели известны как бесщеточные двигатели постоянного тока. Истинные синхронные двигатели управляются синусоидальными сигналами. Можно использовать двух- или трехфазный привод, запитав соответствующее количество обмоток статора. Выше показано только 3 фазы.
Электронный синхронный двигатель
На блок-схеме показана приводная электроника, связанная с синхронным двигателем низкого напряжения (12 В постоянного тока). Эти двигатели имеют датчик положения , встроенный в двигатель, который выдает сигнал низкого уровня с частотой, пропорциональной скорости вращения двигателя.
Датчик положения может быть таким же простым, как твердотельные датчики магнитного поля, такие как устройства на эффекте Холла , обеспечивающие синхронизацию (направление тока якоря) с электроникой привода. Датчик положения может быть датчиком угла с высоким разрешением, таким как резольвер, индуктосин (магнитный энкодер) или оптический энкодер.
Если требуется постоянная и точная скорость вращения (как для дисковода), могут быть включены тахометр и фазовая автоподстройка частоты (рисунок ниже).Этот сигнал тахометра, последовательностью импульсов пропорциональна скорости двигателя, подается обратно в петлю фазовой автоподстройки, который сравнивает частоту и фазу тахометра к источнику опорного стабильно частоты, такие как кварцевый генератор.
Контур фазовой автоподстройки частоты управляет скоростью синхронного двигателя
Бесщеточный двигатель постоянного тока
Двигатель, приводимый в действие прямоугольными волнами тока, обеспечиваемый простыми датчиками Холла, известен как бесщеточный двигатель постоянного тока .Этот тип двигателя имеет более высокое отклонение пульсирующего момента при обороте вала, чем двигатель с синусоидальным приводом. Для многих приложений это не проблема. Хотя в этом разделе нас в первую очередь интересуют синхронные двигатели.
Пульсации крутящего момента двигателя и механический аналог
Пульсация крутящего момента или зубчатость вызывается магнитным притяжением полюсов ротора к полюсным наконечникам статора. (Рисунок выше) Обратите внимание, что катушки статора отсутствуют.Ротор PM можно вращать вручную, но он будет испытывать притяжение к полюсным наконечникам, когда находится рядом с ними.
Это аналогично механической ситуации. Будет ли пульсация крутящего момента проблемой для двигателя, используемого в магнитофоне? Да, мы не хотим, чтобы мотор поочередно ускорялся и замедлялся, когда он перемещает аудиозапись мимо кассетной воспроизводящей головки. Будет ли пульсация крутящего момента проблемой для двигателя вентилятора? №
Обмотки, распределенные в ленте, создают более синусоидальное поле
Если двигатель приводится в действие синусоидальными волнами тока, синхронными с обратной ЭДС двигателя, он классифицируется как синхронный двигатель переменного тока, независимо от того, генерируются ли формы волны привода электронными средствами.Синхронный двигатель будет генерировать синусоидальную обратную ЭДС , если магнитное поле статора имеет синусоидальное распределение.
Он будет более синусоидальным, если обмотки полюсов распределены в виде ремня по множеству пазов, а не сосредоточены на одном большом полюсе (как показано на большинстве наших упрощенных иллюстраций). Такая конструкция подавляет многие нечетные гармоники поля статора.
Слоты с меньшим количеством обмоток на краю фазовой обмотки могут делить пространство с другими фазами.Намоточные ремни могут принимать альтернативную концентрическую форму, как показано на рисунке ниже.
Концентрические ремни
Для двухфазного двигателя, приводимого в действие синусоидальной волной, крутящий момент остается постоянным на протяжении всего оборота по тригонометрической идентичности:
sin2θ + cos2θ = 1
Для генерации и синхронизации формы сигнала привода требуется более точная индикация положения ротора, чем обеспечивается датчиками Холла, используемыми в бесщеточных двигателях постоянного тока.Резольвер или оптический или магнитный энкодер обеспечивает разрешение от сотен до тысяч частей (импульсов) на оборот.
Резольвер выдает аналоговые сигналы углового положения в виде сигналов, пропорциональных синусу и косинусу угла вала. Энкодеры обеспечивают цифровую индикацию углового положения в последовательном или параллельном формате.
Привод синусоидальной волны на самом деле может быть от ШИМ, широтно-импульсного модулятора , высокоэффективного метода аппроксимации синусоидальной волны цифровым сигналом.Каждая фаза требует, чтобы управляющая электроника для этой формы сигнала была сдвинута по фазе на соответствующую величину.
ШИМ аппроксимирует синусоидальную волну
Преимущества синхронного двигателя
КПД синхронного двигателя выше, чем у асинхронных двигателей. Синхронный двигатель также может быть меньше, особенно если в роторе используются высокоэнергетические постоянные магниты. Появление современной полупроводниковой электроники позволяет управлять этими двигателями с регулируемой скоростью.
Асинхронные двигатели чаще всего используются в железнодорожной тяге. Однако небольшой синхронный двигатель, который устанавливается внутри ведущего колеса, делает его привлекательным для таких применений. Версия высокотемпературного сверхпроводящего двигателя этого двигателя составляет от одной пятой до одной трети веса двигателя с медной обмоткой.
Самый большой экспериментальный сверхпроводящий синхронный двигатель, способный управлять кораблем военно-морского эсминца. Во всех этих применениях важен электронный привод с регулируемой скоростью.Привод с регулируемой скоростью также должен снижать напряжение привода на низкой скорости из-за уменьшения индуктивного сопротивления на более низкой частоте.
Для развития максимального крутящего момента ротор должен отставать от направления поля статора на 90 °. Больше он теряет синхронизацию. Гораздо меньше приводит к снижению крутящего момента. Таким образом, необходимо точно знать положение ротора. А положение ротора по отношению к полю статора необходимо рассчитывать и контролировать.
Этот тип управления известен как векторное управление фазой .Он реализован с помощью быстродействующего микропроцессора, управляющего широтно-импульсным модулятором фаз статора. Статор синхронного двигателя такой же, как и у более популярного асинхронного двигателя.
В результате электронное регулирование скорости промышленного уровня, используемое в асинхронных двигателях, также применимо к большим промышленным синхронным двигателям. Если ротор и статор обычного вращающегося синхронного двигателя раскручены, получается синхронный линейный двигатель.
Этот тип двигателя применяется для точного высокоскоростного линейного позиционирования.
СВЯЗАННЫЙ РАБОЧИЙ ЛИСТ:
% PDF-1.3 % 670 0 объект > эндобдж xref 670 103 0000000016 00000 н. 0000002430 00000 н. 0000002643 00000 н. 0000002784 00000 н. 0000002815 00000 н. 0000002872 00000 н. 0000003625 00000 н. 0000003880 00000 н. 0000003947 00000 н. 0000004086 00000 н. 0000004192 00000 п. 0000004348 00000 п. 0000004408 00000 н. 0000004529 00000 н. 0000004709 00000 п. 0000004875 00000 н. 0000004992 00000 п. 0000005104 00000 п. 0000005229 00000 н. 0000005382 00000 п. 0000005477 00000 н. 0000005635 00000 п. 0000005737 00000 н. 0000005869 00000 н. 0000006012 00000 н. 0000006161 00000 п. 0000006294 00000 н. 0000006434 00000 н. 0000006575 00000 н. 0000006694 00000 н. 0000006806 00000 н. 0000006936 00000 н. 0000007101 00000 п. 0000007206 00000 н. 0000007340 00000 п. 0000007447 00000 н. 0000007593 00000 н. 0000007787 00000 н. 0000007885 00000 н. 0000008026 00000 н. 0000008190 00000 п. 0000008319 00000 н. 0000008476 00000 н. 0000008584 00000 н. 0000008681 00000 п. 0000008778 00000 н. 0000008898 00000 н. 0000008993 00000 н. 0000009089 00000 н. 0000009182 00000 п. 0000009275 00000 н. 0000009369 00000 н. 0000009463 00000 п. 0000009557 00000 н. 0000009651 00000 п. 0000009745 00000 н. 0000009839 00000 н. 0000009933 00000 н. 0000010027 00000 п. 0000010121 00000 п. 0000010215 00000 п. 0000010309 00000 п. 0000010404 00000 п. 0000010498 00000 п. 0000010593 00000 п. 0000010772 00000 п. 0000010972 00000 п. 0000012059 00000 п. 0000013162 00000 п. 0000013355 00000 п. 0000013644 00000 п. 0000013875 00000 п. 0000013940 00000 п. 0000014166 00000 п. 0000016036 00000 п. 0000016246 00000 п. 0000017337 00000 п. 0000017728 00000 п. 0000017974 00000 п. 0000018342 00000 п. 0000018365 00000 п. 0000018575 00000 п. 0000019670 00000 п. 0000020351 00000 п. 0000021500 00000 н. 0000021522 00000 п. 0000022580 00000 п. 0000022603 00000 п. 0000023725 00000 п. 0000023748 00000 п. 0000024881 00000 п. 0000024903 00000 п. 0000025914 00000 п. 0000025936 00000 п. 0000026142 00000 п. 0000026825 00000 п. 0000027872 00000 н. 0000027894 00000 н. 0000028963 00000 п. 0000028985 00000 п. 0000029125 00000 п. 0000002913 00000 н. 0000003603 00000 п. трейлер ] >> startxref 0 %% EOF 671 0 объект > эндобдж 672 0 объект a_
Трехфазный асинхронный двигатель с короткозамкнутым ротором
ЗАДАЧИ
• описание конструкции трехфазного двигателя с короткозамкнутым ротором, перечисление основные компоненты этого типа мотора.
• определите следующие элементы и объясните их важность для работы. трехфазного асинхронного двигателя с короткозамкнутым ротором: поле вращающегося статора, синхронная скорость, индуцированные напряжения ротора, регулирование скорости, скольжение в процентах, крутящий момент, пусковой ток, коэффициент мощности без нагрузки, коэффициент мощности при полной нагрузке, обратное вращение и контроль скорости.
• рассчитать скорость двигателя и процент скольжения.
• реверсивный двигатель с короткозамкнутым ротором.
• Опишите, почему двигатель потребляет больше тока при нагрузке.
• нарисуйте схемы, показывающие соединения с двойным напряжением для 230/460 вольт моторный режим.
• объясните информацию на паспортной табличке двигателя.
РАБОЧИЕ ХАРАКТЕРИСТИКИ
Трехфазный асинхронный двигатель с короткозамкнутым ротором относительно мал в физический размер для данного рейтинга мощности по сравнению с другими типами моторов. Асинхронный двигатель с короткозамкнутым ротором имеет очень хорошую регулировку скорости. при различных условиях нагрузки. Благодаря прочной конструкции и надежности трехфазный асинхронный двигатель с короткозамкнутым ротором широко используется для многих промышленных приложений (рис. 1).
КОНСТРУКТИВНЫЕ ДЕТАЛИ
Трехфазный асинхронный двигатель с короткозамкнутым ротором обычно состоит из статор, ротор и два торцевых щита, в которых размещены подшипники, поддерживающие вал ротора.
Для этого типа двигателя требуется минимум обслуживания, поскольку
• обмотки ротора закорочены, образуя беличью клетку.
• нет коммутатора или контактных колец для обслуживания (по сравнению с DC мотор).
• нет щеток, подлежащих замене.
Корпус двигателя обычно изготавливается из литой стали. Сердечник статора запрессован прямо в кадр. Два торцевых щита с подшипниками прикручены болтами. к стальной литой раме. Подшипники, поддерживающие вал ротора, подшипники скольжения или шарикоподшипники. Ill 2 – это вид в разрезе собранного мотора. На рисунке 3 показаны основные части трехфазного, асинхронный двигатель с короткозамкнутым ротором.
ил.1 Трехфазные двигатели, используемые для насосов
ил. 2 Внешний вид конструкции и особенности типового трехфазного
взрывозащищенный двигатель: ПОЛЕВЫЕ ОБМОТКИ СТАТОРА; СМАЗОЧНАЯ ПРОБКА; ПОДЪЕМНЫЙ ГЛАЗ
ил. 3 Основные компоненты асинхронного двигателя с короткозамкнутым ротором: —РОТОР С
ОХЛАЖДАЮЩИЕ ПЛАСТИНЫ КОРОБКА ПРОВОДОВ
ил. 4 Частично намотанный статор трехфазного двигателя
Статор
Типичный статор содержит трехфазную обмотку, установленную в пазах ламинированный стальной сердечник (илл. 4).Сама обмотка состоит из формованных катушки с проводом соединены так, что есть три однофазные обмотки, разнесенные 120 электрических градусов друг от друга. Три отдельные однофазные обмотки затем соединяются, обычно внутри, по схеме звезды или треугольника. Три или девять выводов от трехфазных обмоток статора выведены на клемму коробка, установленная на раме двигателя, для подключения одно- или двух напряжений.
Ротор
Вращающаяся часть двигателя состоит из стальных перфораций или пластин. расположены в цилиндрическом сердечнике (от 5 до 7).Медь или алюминий штанги устанавливаются у поверхности ротора. Прутки припаяны или приварен к двум медным концевым кольцам. В некоторых небольших асинхронных двигателях с короткозамкнутым ротором стержни и концевые кольца отлиты из алюминия как одно целое.
ил 5 показывает такой ротор. Обратите внимание, что ребра залиты в ротор. для циркуляции воздуха и охлаждения двигателя во время его работы. Отметим также, что штанги ротора между кольцами перекошены под углом к граням кольца.Благодаря такой конструкции работающий двигатель будет работать тише и плавнее. На левом конце вала видна шпоночная канавка. С помощью этого шпоночного паза можно закрепить шкив или муфту вала нагрузки.
ил. 5 ротор с короткозамкнутым ротором асинхронного двигателя; больной. 6 Вид в разрезе
обоймы ротора; больной. 7 Беличья клетка для асинхронного двигателя
ил. 8: Торцевой щиток подшипника скольжения для открытого многофазного двигателя: SLINGER
КОЛЬЦО, МАСЛЯНЫЙ СБОРНИК; больной. 9: Торцевой щиток подшипника скольжения для многофазного
Индукционный двигатель.
Подшипники вала
Типовые подшипники скольжения показаны на рис. 8 и 9. Внутренняя часть стенки подшипников скольжения изготовлены из металла баббита, что обеспечивает гладкая, полированная и длинная изнашиваемая поверхность вала ротора. Большой маслоотражательное кольцо увеличенного размера свободно облегает вал ротора и выдвигается вниз в масляный резервуар. Это кольцо собирает масло и стягивает его по вращающемуся вал и опорные поверхности. Два маслосъемных кольца показаны на 10.Этот смазывающая масляная пленка сводит к минимуму потери на трение. Маслосмотровая чашка на сторона каждого торцевого щита позволяет обслуживающему персоналу проверять уровень масла в подшипнике скольжения.
илл. С 14-11 по 14-14 иллюстрируют подшипниковые узлы. В некоторых двигателях вместо подшипников скольжения используются шариковые подшипники. Смазка, а не масло используется для смазки шариковых подшипников. Этот тип подшипника обычно составляет две трети полный смазки во время сборки мотора.Специальная фурнитура есть на концевых раструбах, чтобы можно было использовать шприц для смазки для нанесения дополнительных смазывать шарикоподшипниковые узлы через определенные промежутки времени.
При смазке роликовых подшипников снимите нижнюю заглушку, чтобы старая смазка вытесняется. Технические характеристики двигателя должны Проконсультируйтесь по поводу рекомендованного сорта смазочного материала, процедуры смазки и нагрузок на подшипники.
ил. 10 Частично собранный подшипник скольжения для полностью закрытого,
1250-сильный мотор
ил.11 Торцевой щиток шарикоподшипника для открытого многофазного двигателя
ил. 12 Врезка однорядного шарикоподшипника:
ил. 13 Одиночный шарикоподшипник закрытого типа.
ил. 14 Подшипник шариковый двухрядный.
ПРИНЦИП РАБОТЫ ДВИГАТЕЛЯ БЛОЧКОМ
Как указано в предыдущем абзаце конструкции статора, пазы сердечника статора содержат три отдельные однофазные обмотки.Когда три токи, разнесенные на 120 электрических градусов, проходят через эти обмотки, вращающийся результаты магнитного поля. Это поле движется по внутренней части статора. основной. Скорость вращающегося магнитного поля зависит от количества полюса статора и частота источника питания. Эта скорость называется синхронная скорость и определяется по формуле:
Синхронная скорость об / мин = 120 x частота в герцах / количество полюсов
S = 120xf / p
S = синхронная скорость
f = Герцы (частота)
p = количество полюсов на фазу
Пример 1 .Если трехфазный асинхронный двигатель с короткозамкнутым ротором имеет шесть полюсов на обмотке статора и подключен к трехфазному, 60 Гц источника, то синхронная скорость вращающегося поля составляет 1200 об / мин-оборотов В минуту.
S = 120xf / p = 120×60 / 6 = 1200 об / мин
Поскольку это магнитное поле вращается с синхронной скоростью, оно разрезает медь стержни ротора и индуцирует напряжения в стержнях беличьей клетки обмотка. Эти наведенные напряжения создают токи в стержнях ротора, которые в свою очередь создают поле в сердечнике ротора.Это поле ротора реагирует с поле статора вызывает скручивающий эффект или крутящий момент, который вращает ротор. Ротор всегда вращается со скоростью немного меньшей, чем синхронная скорость. поля статора. Это означает, что поле статора всегда будет сокращать штанги ротора. Если ротор вращается с той же скоростью, что и поле статора, поле статора не режет стержни ротора и не будет индуцированного напряжения или крутящий момент.
Регулировка скорости и процентное скольжение
Асинхронный двигатель с короткозамкнутым ротором имеет очень хорошие характеристики регулирования скорости. (отношение разницы в скорости от холостого хода к полной нагрузке).Скорость работы измеряется в процентах скольжения. Синхронная скорость вращения поле статора используется как точка отсчета. Напомним, что синхронный скорость зависит от количества полюсов статора и рабочей частоты. Поскольку эти две величины остаются постоянными, синхронная скорость также остается постоянным. Если скорость ротора при полной нагрузке вычитается из синхронная скорость поля статора, разница в количестве оборотов в минуту, когда ротор проскальзывает за вращающимся полем статора.
Процентное скольжение = [(синхронная скорость – скорость ротора) / синхронная скорость] х 100
Пример 2 . Если трехфазный асинхронный двигатель с короткозамкнутым ротором используемый в Примере 1, имеет синхронную скорость 1200 об / мин и полную нагрузку. скорость 1140 об / мин, найти процент скольжения.
Синхронная скорость (Пример 1) = 1200 об / мин
Частота вращения ротора при полной нагрузке = 1140 об / мин
Процент скольжения = [(синхронная скорость – скорость ротора) / синхронная скорость] х 100
Процентное скольжение = [(1200 – 1140) / 1200] x 100
Процентное скольжение = 60/1200 x 100 = 0.05 х 100
Процентное скольжение = 5%
Для асинхронного двигателя с короткозамкнутым ротором, поскольку значение процента скольжения уменьшается в сторону 0% улучшаются скоростные характеристики двигателя. Среднее Диапазон процентного скольжения для асинхронных двигателей с короткозамкнутым ротором составляет от 2% до 6 процентов.
ил. 15: Кривая скорости и кривая проскальзывания в процентах.
ill 15 показывает кривую скорости и процент скольжения для беличьей клетки. асинхронный двигатель, работающий от холостого хода до полной нагрузки.Скорость ротора на холостом ходу проскальзывает за синхронной скоростью вращающегося поля статора ровно столько, чтобы создать крутящий момент, необходимый для преодоления трения и ветра потери на холостом ходу. Поскольку на вал двигателя действует механическая нагрузка, ротор имеет тенденцию замедляться. Это означает, что поле статора (вращающееся при фиксированной скорости) режет стержни ротора большее количество раз за данную период. Индуцированные напряжения в стержнях ротора увеличиваются, что приводит к увеличению ток в стержнях ротора и более сильное поле ротора.Есть большая магнитная реакция между полями статора и ротора, которая вызывает более сильную скручивающий эффект или крутящий момент. Это также увеличивает ток статора, снимаемый с линия. Двигатель способен выдерживать повышенную механическую нагрузку с очень небольшое снижение скорости вращения ротора.
Показаны типичные кривые момента скольжения для асинхронного двигателя с короткозамкнутым ротором. на рисунке 16. Выходной крутящий момент двигателя в фунт-футах (фунт-фут) увеличивается. как прямая линия с увеличением значения процентного скольжения как механическая нагрузка увеличена до точки полной нагрузки.За пределами полной нагрузки, кривая крутящего момента изгибается и, наконец, достигает максимальной точки, называемой поломкой крутящий момент. Если двигатель нагружен сверх этой точки, будет соответствующий уменьшайте крутящий момент до тех пор, пока не будет достигнута точка остановки двигателя. Тем не мение, все асинхронные двигатели имеют некоторое скольжение для нормальной работы. Пусковой момент не показан, но составляет примерно 300% рабочего крутящего момента.
Пусковой ток
Когда трехфазный асинхронный двигатель с короткозамкнутым ротором подключен через полное линейное напряжение, пусковой импульс тока мгновенно достигает от 400% до 600% или более номинального тока полной нагрузки.В момент запуска двигателя ротор остановлен. В этот момент поэтому поле статора режет стержни ротора с большей скоростью, чем когда ротор вращается. Это означает, что будет относительно высокая индуцированная напряжение в роторе, которое вызовет сильный ток ротора. Результирующий входной ток обмоток статора в момент пуска будет высоким. Из-за этого высокого пускового тока пусковая защита имеет высокий как 300 процентов от номинального тока полной нагрузки для предохранителей без задержки настройки Предусмотрено для асинхронных двигателей с короткозамкнутым ротором.
Большинство асинхронных двигателей с короткозамкнутым ротором запускаются при полном напряжении. Если здесь есть вопросы по запуску крупногабаритных двигателей на полную мощность напряжения, следует проконсультироваться с электроэнергетической компанией. В случае что фидеры и защитные устройства электросети не могут для работы с большими пусковыми токами, пусковыми цепями пониженного напряжения должен использоваться с двигателем.
ил. 16 Кривые момента скольжения для работающего двигателя с короткозамкнутым ротором: ПОЛНАЯ НАГРУЗКА
МОМЕНТ, ПРОСМОТР, МОМЕНТ ПРИ НОМИНАЛЬНОМ НАПРЯЖЕНИИ, МОМЕНТ ПРОБИРАТЕЛЬНОГО МОМЕНТА
Коэффициент мощности
Низкий коэффициент мощности асинхронного двигателя с короткозамкнутым ротором на холостом ходу и при низкой нагрузке.На холостом ходу коэффициент мощности может составлять всего Отставание на 15 процентов. Однако, когда к двигателю приложена нагрузка, мощность фактор увеличивается. При номинальной нагрузке коэффициент мощности может достигать Отставание от 85 до 90 процентов.
Коэффициент мощности на холостом ходу низкий, поскольку намагничивающая составляющая входной ток составляет большую часть от общего входного тока двигателя. Когда нагрузка на двигатель увеличивается, синфазный ток подается к двигателю увеличивается, но намагничивающая составляющая тока остается практически то же самое.Это означает, что результирующий линейный ток больше почти в фазе с напряжением, и коэффициент мощности улучшается, когда двигатель загружен, по сравнению с ненагруженным двигателем, у которого есть намагничивание ток как основной компонент входного тока.
ill 17 показывает увеличение коэффициента мощности из состояния холостого хода. до полной загрузки. На диаграмме холостого хода синфазный ток (Iw) невелик. по сравнению с током намагничивания (Im), таким образом, коэффициент мощности равен плохо на холостом ходу.На диаграмме полной нагрузки синфазный ток увеличился при этом ток намагничивания остается прежним. В результате угол задержки линейного тока уменьшается, а коэффициент мощности увеличивается.
ил. 17 Коэффициент мощности на холостом ходу и при полной нагрузке. БОЛЬШОЙ УГОЛ ОТСТАВКИ –
НИЗКИЙ КОЭФФИЦИЕНТ МОЩНОСТИ, БЕЗ НАГРУЗКИ, ПОЛНАЯ НАГРУЗКА
Реверс вращения
Направление вращения трехфазного асинхронного двигателя можно изменить на противоположное. охотно.Двигатель будет вращаться в противоположном направлении, если любые два из три линейных провода перевернуты (рис. 18). Отведения поменяны местами у мотора.
ил. 18: Обратное вращение асинхронного двигателя: ВРАЩЕНИЕ ДО / ПОСЛЕ
ПОДКЛЮЧЕНИЯ ИЗМЕНЕНЫ
Контроль скорости
Асинхронный двигатель с короткозамкнутым ротором почти не изменяет скорость без внешний контроль. Напомним, что скорость двигателя зависит от частоты трехфазного источника и числа полюсов обмотки статора.
Частота питающей сети обычно 60 герц, поддерживается по этой стоимости местной энергокомпанией. Поскольку количество полюсов в двигателе также есть фиксированное значение, синхронная скорость двигателя остается постоянным. В результате невозможно получить диапазон скорость без изменения применяемой частоты. Его можно контролировать с помощью система электронного привода переменного тока с регулируемой частотой или путем изменения количества опор с помощью внешних контроллеров.
ИНДУКЦИОННЫЕ ДВИГАТЕЛИ С ДВОЙНЫМ НАПРЯЖЕНИЕМ
Многие трехфазные асинхронные двигатели с короткозамкнутым ротором предназначены для работы при двух разных номинальных напряжениях. Например, типичный номинал двойного напряжения для трехфазного двигателя 230/460 вольт.
илл 19 показывает типичную обмотку статора, соединенную звездой, которая может быть используется для трехфазного напряжения 230 В или трехфазного 460 Вольт. Каждый из трех однофазных обмоток состоят из двух обмоток катушки.Там это девять выводов, выведенных наружу из обмотки статора этого типа. Эти выводы, обозначенные как выводы с 1 по 9, заканчиваются в клеммной коробке мотор. Чтобы отметить выводы, начните с верхнего левого вывода T1 и продолжайте движение по часовой стрелке по спирали к центру, отмечая каждый вывод, как показано на рисунке.
ил. 19: Метод определения маркировки клемм.
ил. 20: соединение звездой на 460 Вольт. Катушки соединены последовательно.
ил 20 показывает соединения, необходимые для работы двигателя от 460-вольтовый, трехфазный источник. Две катушки каждой однофазной обмотки соединены последовательно, илл. 14-21 показаны соединения, позволяющие работать от трехфазного источника на 230 В.
ил. 21: соединение звездой 230 В. Катушки подключены параллельно.
Двигатели с соединением звездой
Если идентификация 9-проводного (двойного напряжения), 3-фазного, звезды подключена двигатель был разрушен, электрик должен повторно идентифицировать их перед подключение мотора к линии.Можно использовать следующий метод. Первый, Определите внутреннюю подключенную точку звезды, проверив целостность цепи между тремя выводами, как на рисунке 22 A.
Затем определите три других набора катушек по непрерывности между двумя ведет за один раз (илл. 22 B). Назначьте T7, T8 и T9 любому из трех выводы постоянных катушек, соединенных звездой (а). Применить более низкий рейтинг линейное напряжение для двигателя на T7, T8 и T9 и работайте, чтобы проверить направление вращения.Отключите сетевое напряжение и подключите один из неопределенных катушки на T Подключите питание, оставив линии на T7, T8 и T9. Если Катушка правильно подключена и является правильной катушкой, напряжение должно быть примерно в 1,5 раза выше линейного напряжения между свободным концом и другим две строчки. Будьте осторожны с сетевым напряжением.
Если выбрана правильная катушка, но наоборот, напряжение между свободный конец и два других вывода будут составлять около 58% от линейного напряжения.Если выбрана неправильная катушка, разница напряжений между свободными конец и два других провода будут неровными (см. рисунок 22 C).
Когда показания равны и примерно в 1,5 раза превышают линейное напряжение, Пометьте провод, подключенный к T7, как T4, а другой конец катушки как T1.
Проведите те же испытания с другой катушкой, подключенной к Т. Отметьте эти провода. T и T Выполните тот же тест с последней катушкой, подключенной к 19, чтобы определить 13 и 16 отведений.
Подключите L1 к T1, L2 к T2, L3 к T3 и T4 к T7, T5 к T8, T6 к T9 и включите двигатель. Двигатель должен работать в том же направлении, что и раньше и работать спокойно.
ил. 22: Двигатель, подключенный звездой или звездой; A) Внутренняя маркировка выводов со звездочкой;
B) Маркировка выводов группы катушек C) Проверка правильности маркировки выводов катушек на
Двигатель с двойным напряжением, соединенный звездой
Двигатели с соединением Delta
Другой вариант подключения трехфазных двигателей – соединение треугольником. мотор.Он назван так потому, что получившийся схематический узор выглядит как греческая буква Дельта (символ дельты).
Метод идентификации и подключения этих выводов необходим, потому что он отличается от двигателя, подключенного звездой или звездой.
Правильное подключение выводов Delta подключен, трехфазный, Двигатель с двойным напряжением представляет проблему, если маркировка выводов повреждена.
ил. 23: Девять выводов треугольника, трехфазного, двойного напряжения.
двигатель
Во-первых, электрик должен определить, подключен ли двигатель треугольником. или звезда подключена.Оба двигателя имеют девять выводов, если они двухвольтные. моторы. Однако двигатель, подключенный по схеме треугольника, имеет три комплекта по три вывода. которые имеют непрерывность, а двигатель, подключенный звездой, имеет только один комплект из трех.
Для продолжения необходим чувствительный омметр, чтобы найти середину каждого группа из трех отведений. Значения сопротивления низкие при использовании постоянного тока омметр, поэтому будьте осторожны при определении центра каждой группы катушек. Обозначьте центр каждой группы T1, T2 и T3 соответственно.Использование маскировки ленты, временно обозначьте другие отведения группы T1 как T4 и T9. См. ил 23 А.
Временно отметьте концы группы T2 как T5 и T7 и отметьте концы группы Т3 как Т6 и Т8.
Подключите двигатель с более низким номинальным напряжением, используя линии 1, 2 и 3, к T1, Т4 и Т9. Остальные катушки будут иметь наведенное напряжение, поэтому будьте осторожны, прикоснуться к другим свободным проводам друг к другу или к вам!
Отключите питание и подсоедините провод с маркировкой T4 к T7.Подключите мощность, как и раньше, и считайте напряжение между T1 и T2. Если маркировка правильные, напряжение должно быть примерно в два раза выше приложенного линейного напряжения. Если он показывает примерно в 1,5 раза больше напряжения в сети, снова подключите T4 к проводу. отмечен Т5. Если напряжение T1 – T2 затем упадет до 220, повторно подключите T9 к T7. тем самым меняя обе катушки. Когда напряжение от T1 до T2 равно удвоенному значению приложенного линейного напряжения, пометьте соединенные вместе провода как T4 от Группа T1 подключена к T7 группы T2.
Теперь используйте третью группу катушек. Оставьте нижнюю линию напряжения подключенной к первая группа по-прежнему. Проверьте и подключите провода так, чтобы при включении T9 подключенный к проводу третьей группы, напряжение T1-to-T2 в два раза больше приложенное линейное напряжение. Обозначьте провод, подключенный к T9, как T6, а другой конец группы катушек как T8.
Чтобы дважды проверить, отсоедините провод линии от T9 и снова подключите к T7. отсоедините сетевой провод от T1 и снова подсоедините его к T2, отсоедините провод от T9 и снова подключите его к T5 Двигатель должен работать в том же направление как раньше.Если этого не произошло, еще раз проверьте маркировку проводов.
Для дальнейшей проверки переместите провода от T7 к T8, от T2 к T6 и от T5 к T3. Запустить мотор. Вращение должно быть таким же, как и в предыдущем. шаги. Будьте осторожны! На другие обмотки наведено напряжение. (см. илл 24).
ил. 24 Иллюстрация испытаний напряжением, используемых для определения правильного вывода
маркировка двигателя Delta
ТАБЛИЧКА ДВИГАТЕЛЯ
Таблички с паспортными данными двигателясодержат информацию, важную для правильного выбора и установки двигателя.Наиболее полезные данные, указанные на паспортной табличке, относятся к к электрическим характеристикам двигателя. Зная эту информацию и используя Национальный электротехнический кодекс, электрик может определить размеры кабелепровода, провода, пусковой и пусковой защиты. (NEC дает минимальные требования.)
Данные о конструкции и производительности, указанные на паспортной табличке, полезны для технического обслуживания. персонал. Информация жизненно важна для быстрой и правильной замены. двигателя, если необходимо.Для лучшего понимания мотора типичный Информация на паспортных табличках двигателя описывается следующим образом (рис. 25).
• Название производителя
• Тип определяет тип корпуса. Это производитель система кодовой идентификации.
• Серийный номер – это конкретный идентификатор двигателя. Это человек номер, присвоенный двигателю, аналогично номеру социального страхования для человек. Он хранится у производителя.
• Номер модели является дополнительной идентификацией производителя, обычно используется для целей заказа.
• Размер рамы определяет размеры двигателя.
• Коэффициент обслуживания (или SF) – коэффициент обслуживания 1,0 означает, что нельзя ожидать, что двигатель будет обеспечивать мощность, превышающую номинальную. Мотор будет безопасно работать, если номинальная мощность в лошадиных силах умножена на коэффициент обслуживания, максимум. Общие сервисные коэффициенты от 1,0 до 1.15. Рекомендуется двигатель не может работать непрерывно в диапазоне эксплуатационных коэффициентов. Это может сократить срок службы изоляционной системы.
Ампер означает ток, потребляемый из линии, когда двигатель работает. при номинальном напряжении и частоте при полной номинальной мощности, указанной на паспортной табличке.
• Вольт должно быть значением, измеренным на клеммах двигателя, и должно быть значением, на которое рассчитан двигатель.
• Класс изоляции относится к изоляционному материалу, используемому в обмотке. статор двигателя.Например, в системе класса B максимальная рабочая температура 130 ° С; для класса F это 155 ° C; а для класса H это 180 ° С.
• RPM (или об / мин) означает скорость в оборотах в минуту, когда все остальные соблюдены условия паспортной таблички.
• Герцы – это частота системы питания, для которой предназначен двигатель. Производительность будет изменена, если он будет работать на других частотах.
• Режим работы – это рабочий цикл, при котором двигатель может безопасно работать.«Непрерывный» означает, что двигатель может работать с полной нагрузкой 24 часа в сутки. Если «средний» отображается временной интервал. Это означает, что двигатель может работать при полной загрузке за указанный период. Затем следует остановить двигатель и дать ему остыть перед повторным запуском.
• Температура окружающей среды указывает максимальную температуру окружающего воздуха. при которой двигатель может работать для выдачи номинальной мощности.
• Ввод фазы указывает количество фаз напряжения, при которых двигатель предназначен для работы.
• кВА – это буквенный код, обозначающий кВА с заторможенным ротором на Лошадиные силы. Это используется для определения пускового оборудования и защиты. для мотора. Таблицу кодовых букв можно найти в Национальном электротехническом Код.
• КПД выражается в процентах. Это значение находится в стандартном двигатели, а также двигатели с «повышенной эффективностью».
• Шум – некоторые двигатели рассчитаны на низкий уровень шума. Уровень шума Значение, указанное на паспортной табличке, измеряется в единицах звука «дБА».
• Примечания производителя – список конкретных характеристик двигателей, таких как «Термозащищенные» и / или «подшипники со шкалой».
ВЫСОТА
Гарантии производителя для стандартных двигателей обычно основаны на при работе на любой высоте до 3300 футов. Двигатели пригодные для эксплуатации на высоте более 3300 футов над уровнем моря имеют особую конструкцию и / или другой класс изоляции. Например, стандартные двигатели с коэффициентом обслуживания 1.15 может эксплуатироваться на высоте до 9900 футов, используя коэффициент обслуживания. На высоте 9900 футов коэффициент обслуживания будет 1,00. Возможно, потребуется снизить мощность двигателя. или используйте рамку большего размера.
РЕЗЮМЕ
Трехфазные асинхронные двигатели используют в роторе короткозамкнутую обмотку. К ротору нет электрических соединений, но наведен ток. в обмотки ротора за счет электромагнитной индукции.Беличья клетка обмотка создает магнитное поле, которое подталкивается и притягивается статором магнитное поле.
Ротор поддерживается стальным валом, который должен вращаться. Вал допускается вращение с применением различных типов подшипников и различных смазок. Синхронная скорость, регулировка скорости и проскальзывание в процентах все расчеты используются для определения скорости ротора. Мотор электрические характеристики, такие как коэффициент мощности и пусковой ток связанных с электрической схемой двигателя.
Если маркировка выводов двигателя разрушена, выводы можно пометить заново. в соответствии с процедурами, описанными в этом блоке. Данные паспортной таблички двигателя это важная информация, которую следует использовать при заказе двигателей на замену. Некоторый информация на паспортной табличке важна для правильной замены рабочего характеристики и другие данные используются для расчета параметров электропитания и защиты двигателя.
ВИКТОРИНА
A. Ответьте на следующие утверждения и вопросы.
1. Перечислите основные части асинхронного двигателя с короткозамкнутым ротором. ___________
2. Назовите два преимущества использования асинхронного двигателя с короткозамкнутым ротором. _______
3. Назовите два недостатка асинхронного двигателя с короткозамкнутым ротором. ________
4. Перечислите два фактора, которые определяют синхронную скорость индукции. мотор.
5. Объясните, как изменить направление вращения трехфазного, асинхронный двигатель с короткозамкнутым ротором.
6. Четырехполюсный трехфазный асинхронный двигатель с короткозамкнутым ротором с частотой 60 Гц имеет скорость полной нагрузки 1725 об / мин. Определите синхронную скорость этого мотор.
7. Какой процент пробуксовки двигателя указан в вопросе 6? ______________
8. Почему термин «беличья клетка» применяется к этому типу трехфазной индукции? мотор?
B. Выберите правильный ответ для каждого из следующих заявления.
9.Кто или что определяет, можно ли запускать большие асинхронные двигатели при полное напряжение на линии?
а. максимальный размер двигателя
г. номинальное напряжение
г. Энергетическая компания
г. отдел строительства и безопасности
10. Коэффициент мощности трехфазного асинхронного двигателя с короткозамкнутым ротором, работающего выгружено __
а. так же, как и при полной загрузке.
г. очень бедный.
г. очень хороший.
г. в среднем.
11. Коэффициент мощности трехфазного асинхронного двигателя с короткозамкнутым ротором, работающего с полной нагрузкой _____
а. улучшается без нагрузки.
г. уменьшается от холостого хода.
г. остается таким же, как и без нагрузки.
г. становится 100 процентов.
12. Асинхронный двигатель с короткозамкнутым ротором популярен благодаря своим характеристикам. из:
а. высокий процент скольжения.
г.низкий процент скольжения.
г. простая, прочная конструкция.
г. хорошая регулировка скорости.
13. Скорость асинхронного двигателя с короткозамкнутым ротором зависит от:
а. приложенное напряжение.
г. частота и количество полюсов.
г. Напряженность поля.
г. сила тока.
14. Скорость рассчитывается по формуле:
а.
