
лазерный и другие виды датчиков измерения расстояния
Датчик расстояния — это устройство, которое используется для измерения длины, высоты и ширины объекта. Для удобства датчик встраивают в корпус, программируют его и придают компактный вид. Таким образом создается дальномер, который широко используется во многих сферах.
Виды датчиков
На рынке можно найти несколько основных видов датчиков расстояния, самыми популярными считаются:
- ИК датчик — работает на основе испускаемого инфракрасного луча (лазера), высокоточное оборудование имеющие широкую сферу применения.Лазерный датчик расстояния работает таким образом: прибор посылает сигнал в виде лазерного луча, который отражается от стоящего перед ним препятствия и возвращается обратно в фотоэлемент. На основе того с какой скоростью вернулся сигнал, микроконтроллер вычисляет расстояние до препятствия. В зависимости от качества датчика, он может измерять дальность до нескольких сотен метров.
- Ультразвуковой датчик — используется в основном для конструирования автоматических систем умного дома, так как имеет слишком большую погрешность для точных измерений.
Где используются датчики
В основном лазерные датчики расстояния используются в строительной сфере для замеров расстояния между объектами, но им можно найти множество применений. К примеру, датчики расстояния могут помочь в обустройстве умного дома. Установив и, настроив датчик определенным образом, можно автоматизировать включение и выключение света в комнате или сделать автоматическое открытие или закрытие дверей и так далее.
Также подобный датчик установлен в каждый современный смартфон, с его помощью выключается экран, как только смартфон близко подносится к уху во время разговора. Датчики расстояния часто устанавливают в капот и бампер машины, чтобы облегчить парковку и получать данные о препятствиях на пути автомобиля в реальном времени.
Данные датчики измерения расстояния можно приобрести в отдельном виде, но без программируемого микроконтроллера они почти бесполезны. Поэтому покупать их по отдельности разумно только для решения узкого спектра задач. Для подключения датчиков обычно используется микроконтроллер «Ардуино», который необходимо вручную настраивать и прошивать для работы с определенным типом датчиков.
Для тех, кто не хочет углубляться в основы программирования платформы «Ардуино» и радиотехники, рекомендуется купить готовый вариант в виде строительного дальномера.
Что такое дальномер
Дальномер — это компактный девайс, который пришел на смену строительным рулеткам. Данный прибор способен моментально выполнить точные замеры, проводить сложные расчеты, но главный плюс — это то, что его может использовать один человек, без помощи напарника, который держит один конец рулетки.
Данный прибор способен моментально выполнить точные замеры, проводить сложные расчеты, но главный плюс — это то, что его может использовать один человек, без помощи напарника, который держит один конец рулетки.
Существует множество формфакторов и вариантов исполнения данного девайса, но обычно это небольшое устройство, которое помещается в ладонь. Дальномер имеет встроенный аккумулятор что позволяет ему работать долгое время без подзарядки. На корпусе устройства расположен дисплей, на который выводится основная информация о текущем состоянии устройства, а также о результатах замеров. На торце имеется излучатель и приемник, благодаря которым осуществляются измерения.
Лазерные дальномеры активно используются в строительстве и во время монтажных работ. Устройство способно проводить точные измерения с погрешностью 1–3 мм на 10 метров, в зависимости от технических характеристик модели.
Дальномеры делятся на две группы:
- Активные модели — определяют расстояние при помощи звукового, лазерного или светового луча.
 После выпуска луча он отражается от препятствия и направляется обратно в дальномер. Датчик, который улавливает сигнал проводит вычисления, и выдает результат на дисплей.
После выпуска луча он отражается от препятствия и направляется обратно в дальномер. Датчик, который улавливает сигнал проводит вычисления, и выдает результат на дисплей. - Пассивные модели — работают на основе формулы равнобедренного треугольника, где нужное расстояние это высота h, а длина основания неизвестна. Пассивные устройства активно используются в геодезии, спорте, охоте и там, где минимальные измерения начинаются от 0.5 км и могут доходить до нескольких километров. Для работ, где важна точность измерений вплоть до сантиметра такие устройства не подходят.
Приобретать дальномеры нужно в зависимости от того для какой деятельности он будет использоваться.
Конструкция дальномеров
Визуально большинство устройств схожи с мобильным телефоном на верхушке которого расположен лазерный излучатель. Бюджетные устройства обычно оборудованы LED-дисплеем с подсветкой, на котором может расположиться от одной до четырех строк с данными.
Профессиональные устройства оснащены жидкокристаллическими дисплеями и поддерживают несколько тысяч цветов. Такие устройства имеют проработанный интерфейс, внутреннею память и иногда встроенную камеру.
Такие устройства имеют проработанный интерфейс, внутреннею память и иногда встроенную камеру.
На любой модели снизу экрана расположены кнопки управления, их количество может варьироваться от 2–10 и более в зависимости от типа устройства. Почти на всех моделях, чтобы начать проводить замеры нужно нажать центральную кнопку, которая выделена красным цветом. Продвинутые аппараты со встроенной памятью могут сохранять последние расчеты и проводить сложные вычисления площади помещения и так далее.
В зависимости от цены аппарат может быть в пластиковом корпусе, а может быть в защитном чехле, который будет надежно защищать дальномер от падений.
Функционал устройства
Функционал бюджетных моделей как правильно органичен лишь измерением дальности. Но аппараты среднего ценового диапазона уже включают в себя множество полезных функций, среди которых:
- Определения периметра и площади.
- Вычисление объема измеряемых объектов.
- Встроенный уровень.

- Передача данных.
И это далеко не весь список возможностей качественных дальномеров. С повышением цены на устройство растет и его функционал. Профессиональный дальномер — это важнейший инструмент для строителя, без которого невозможно качественно завершить проект.
При выборе дальномера нужно опираться на то, чтобы в него была встроена возможность:
- Считать площадь и объем. Данные показатели вычисляются путем измерения нескольких граней. Функция полезна во время проведения отделочных работ, она облегчает расчет количества строительных материалов.
- Уровень — используется в самых разнообразных целях. Девайс может быть оснащен простым уровнем, выполненным в роли ватерпаса, который расположен на корпусе или в качестве функциональной программы, которая выводит градус наклона на дисплей.
- Однотипные скобы — позволяют проводить диагональные измерения из углов, в которых невозможно плотно зафиксировать девайс. Некоторые датчики дистанции оборудованным выдвижными штырями, которые расположены внутри корпуса.

- Сохранения данных — данная функция существенно облегчает работы, где нужно проводить много параллельных замеров и избавляет от необходимости записывать данные об площади и объеме объектов на бумагу. Возможность в любой момент посмотреть результаты прошлых замеров также могут быть полезны при выборе стройматериалов, когда в магазине нужно четко ориентироваться по размерам комнаты.
- Передача накопленных данных. Передача данных на другое устройство обычно происходит с помощью USB кабеля, но дорогие модели имеют встроенный блютуз. Все измерения могут передаваться в виде текстового файла или картинки. Также полученные данные с помощью специальной программы можно удобно преобразовать в точный чертеж помещения.
- Непрерывное изменение — данная функция превращает девайс в лазерную рулетку, которая показывает расстояние до препятствия в режиме реального времени. Такая функция поможет отмереть часть необходимой длины и проверить неровность покрытий, на которые дальномер установлен.
- Визир — имеет вид небольшого оптического прицела, который используется для точного наведения измерительного луча на необходимый объект, расположенный вдали. В профессиональных моделях визир имеет вид камеры и выводит на экран прибора картинку с перекрестием или точкой для удобного прицеливания.
- Измерение высоты — функция позволяет получить данные об высоте потолка, дома и другого высокого объекта. Измерение происходит таким образом — нужно отмерять расстояние от девайса до основания объекта и до конечной точки. Далее полученные данные обрабатываются устройством и на дисплей выводиться результаты измерений.
Данный набор функций актуален для строителей. Если лазерный дальномер покупается для бытовых целей или небольшого ремонта, можно ограничиться недорогой моделью без множества функций.
Как использовать дальномер
Задача дальномера — это упростить и ускорить процесс измерения. Производители выпускают девайсы с интуитивно понятным интерфейсом, поэтому разобраться какая кнопка за что отвечает не трудно. Для облегчения изучения основных функций нового девайся в комплекте с каждым устройством идет детальная инструкция, в которой разобраны все аспекты использования дальномера.
Для облегчения изучения основных функций нового девайся в комплекте с каждым устройством идет детальная инструкция, в которой разобраны все аспекты использования дальномера.
В независимости от модели дальномера на его корпусе будет расположены минимум 2 кнопки:
- Для старта измерения.
- Для очистки данных.
Чем дороже аппарат, тем больше кнопок он имеет. Дорогие модели оборудованы кнопками навигации по интерфейсу. Обычно на каждую кнопку нанесена гравировка, изучив которую можно понять за что клавиша отвечает.
Главный фактор, который объединяет все модели дальномеров заключается в принципе использования девайса. Нулевая точка для каждого аппарата установлена на нижний торец корпуса или на выдвижные штыри.
Провести замеры можно таким образом:
- Аппарат прикладывается к стене задним торцом.
- Лучи должны смотреть в сторону измеряемого расстояния.
- Далее нужно нажать кнопку «Измерения».
- После чего данные об расстоянии будут выведены на дисплей.
В зависимости от модели тип действий может отличаться.
Плюсы и минусы использования
Лазерные дальномеры широко используются в сфере строительства благодаря своим основным плюсам:
- Большая рабочая дальность. В зависимости от стоимости и типа, девайс способен почти без погрешности работать на расстояниях более сотни метров.
- Удобство юстировки. Данный плюс обусловлен тем, что лазерное пятно хорошо видно на любой поверхности.
- Защита от засветов. Испускаемый луч имеет узкий монохромный спектр, который исключает случайное срабатывание. Приемник сигнала будет реагировать только на попадание в него отраженного лазера.
- Защита от помех. Датчик функционирует только в импульсном режиме, поэтому на него не воздействуют условия внешней среды.
- Низкое потребление энергии. На одной зарядке датчик может произвести несколько сотен измерений.
К минусам можно отнести достаточно высокую стоимость даже простых моделей. Но обычные датчики без микроконтроллера стоят в несколько раз дешевле и при наличии навыков программирования и пайки можно собрать собственный дальномер.
Заключение
Из данного материала вы узнали, что такое датчики расстояния, какие они бывают и как они работают. Лучший вариант — это купить готовый дальномер, который подойдет для решения любых задач, связанных с измерением площади и дальности расположения объектов. Купить дальномер, можно практически в любом строительном магазине, а отдельные датчики продаются в магазинах радиотехники.
Видео по теме
Начинаем изучать инфракрасный датчик Lego mindstorms EV3
Содержание урока
Введение:
Инфракрасный датчик входит домашнюю версию набора Lego mindstorms EV3. Это единственный датчик, который может применяться как самостоятельно, так и в паре с инфракрасным маяком, тоже являющимся частью домашнего набора. Следующие два урока мы посвятим изучению этих двух устройств, а также их взаимодействию между собой.
8.1. Изучаем инфракрасный датчик и инфракрасный маяк
Инфракрасный датчик (Рис. 1) в своей работе использует световые волны, невидимые человеку – инфракрасные волны*. Такие же волны используют, например, дистанционные пульты управления различной современной бытовой техникой (телевизорами, видео и музыкальными устройствами). Инфракрасный датчик в режиме “Приближение” самостоятельно посылает инфракрасные волны и, поймав отраженный сигнал, определяет наличие препятствия перед собой. Еще два режима работы инфракрасный датчик реализует в паре с инфракрасным маяком (Рис. 2). В режиме “Удаленный” инфракрасный датчик умеет определять нажатия кнопок инфракрасного маяка, что позволяет организовать дистанционное управление роботом. В режиме “Маяк” инфракрасный маяк посылает постоянные сигналы, по которым инфракрасный датчик может определять примерное направление и удаленность маяка, что позволяет запрограммировать робота таким образом, чтобы он всегда следовал в сторону инфракрасного маяка. Перед использованием инфракрасного маяка в него необходимо установить две батарейки AAA.
Перед использованием инфракрасного маяка в него необходимо установить две батарейки AAA.
Рис. 1
Рис. 2
8.2. Инфракрасный датчик. Режим “Приближение”
Этот режим работы инфракрасного датчика похож на режим определения расстояния ультразвуковым датчиком. Разница кроется в природе световых волн: если звуковые волны отражаются от большинства материалов практически без затухания, то на отражение световых волн влияют не только материалы, но и цвет поверхности. Темные цвета в отличие от светлых сильнее поглощают световой поток, что влияет на работу инфракрасного датчика. Диапазон работы инфракрасного датчика также отличается от ультразвукового – датчик показывает значения в пределах от 0 (предмет находится очень близко) до 100 (предмет находится далеко или не обнаружен). Еще раз подчеркнем: инфракрасный датчик нельзя использовать для определения точного расстояния до объекта, так как на его показания в режиме “Приближение” оказывает влияние цвет поверхности исследуемого предмета. В свою очередь это свойство можно использовать для различия светлых и темных объектов, находящихся на равном расстоянии до робота. С задачей же определения препятствия перед собой инфракрасный датчик справляется вполне успешно.
В свою очередь это свойство можно использовать для различия светлых и темных объектов, находящихся на равном расстоянии до робота. С задачей же определения препятствия перед собой инфракрасный датчик справляется вполне успешно.
Решим практическую задачу, похожую на Задачу №14 Урока №7, но, чтобы не повторяться, усложним условие дополнительными требованиями.
Задача №17: написать программу прямолинейно движущегося робота, останавливающегося перед стеной или препятствием, отъезжающего немного назад, поворачивающего на 90 градусов и продолжающего движение до следующего препятствия.
У робота, собранного по инструкции small-robot-31313, впереди по ходу движения установлен инфракрасный датчик. Соединим его кабелем с портом “3” модуля EV3 и приступим к созданию программы.
Рассмотрим программный блок “Ожидание” Оранжевой палитры, переключив его в Режим: “Инфракрасный датчик” – “Сравнение” – “Приближение” (Рис. 3). В этом режиме программный блок “Ожидание” имеет два входных параметра: “Тип сравнения” и “Пороговое значение”. Настраивать эти параметры мы уже умеем.
3). В этом режиме программный блок “Ожидание” имеет два входных параметра: “Тип сравнения” и “Пороговое значение”. Настраивать эти параметры мы уже умеем.
Рис. 3
Решение:
- Начать прямолинейное движение вперед
- Ждать, пока пороговое значение инфракрасного датчика станет меньше 20
- Прекратить движение вперед
- Отъехать назад на 1 оборот двигателей
- Повернуть вправо на 90 градусов (воспользовавшись знаниями Урока №3, рассчитайте необходимый угол поворота моторов)
- Продолжить выполнение пунктов 1 – 5 в бесконечном цикле.
Попробуйте решить Задачу № 17 самостоятельно, не подглядывая в решение.
Решение Задачи №17 Рис. 4
А теперь для закрепления материала попробуйте адаптировать решение Задачи №15 Урока №7 к использованию инфракрасного датчика! Получилось? Поделитесь впечатлениями в комментарии к уроку. ..
..
8.3. Дистанционное управление роботом с помощью инфракрасного маяка
Инфракрасный маяк, входящий в домашнюю версию конструктора Lego mindstorms EV3, в паре с инфракрасным датчиком позволяет реализовать дистанционное управление роботом. Познакомимся с маяком поближе:
- Пользуясь инфракрасным маяком, направляйте передатчик сигнала (Рис. 5 поз. 1) в сторону робота. Между маяком и роботом должны отсутствовать любые препятствия! Благодаря широкому углу обзора инфракрасный датчик уверено принимает сигналы, даже если маяк располагается позади робота!
- На корпусе маяка расположены 5 серых кнопок (Рис. 5 поз. 2), нажатия которых распознает инфракрасный датчик, и передает коды нажатий в программу, управляющую роботом.
- С помощью специального красного переключателя (Рис. 5 поз. 3) можно выбрать один из четырех каналов для связи маяка и датчика. Сделано это для того, чтобы в непосредственной близости можно было управлять несколькими роботами.

Рис. 5
Задача №18: написать программу дистанционного управления роботом с помощью инфракрасного маяка.
Мы уже знаем, что для реализации возможности выбора выполняющихся блоков необходимо воспользоваться программным блоком “Переключатель” Оранжевой палитры. Установим режим работы блока “Переключатель” в “Инфракрасный датчик” – “Измерение” – “Удалённый” (Рис. 6).
Рис. 6
Для активации связи между инфракрасным датчиком и маяком необходимо установить правильное значение параметра “Канал” (Рис. 7 поз. 1) в соответствии с выбранным каналом на маяке! Каждому программному контейнеру блока “Переключатель” необходимо сопоставить один из возможных вариантов нажатия серых клавиш (Рис. 7 поз. 2). Заметьте: некоторые варианты включают одновременное нажатие двух клавиш (нажатые клавиши помечены красным цветом). Всего в программном блоке “Переключатель” в этом режиме можно обрабатывать до 12 различающихся условий (одно из условий должно быть выбрано условием по умолчанию). Добавляются программные контейнеры в блок “Переключатель” нажатием на “+” (Рис. 7 поз.3).
Всего в программном блоке “Переключатель” в этом режиме можно обрабатывать до 12 различающихся условий (одно из условий должно быть выбрано условием по умолчанию). Добавляются программные контейнеры в блок “Переключатель” нажатием на “+” (Рис. 7 поз.3).
Рис. 7
Предлагаем реализовать следующий алгоритм управления роботом:
- Нажатие верхней левой кнопки включает вращение левого мотора, робот поворачивает вправо (Рис. 7 поз. 2 значение: 1)
- Нажатие верхней правой кнопки включает вращение правого мотора, робот поворачивает влево (Рис. 7 поз. 2 значение: 3)
- Одновременное нажатие верхних левой и правой кнопок включает одновременное вращение вперед левого и правого мотора, робот двигается вперед прямолинейно (Рис. 7 поз. 2 значение: 5)
- Одновременное нажатие нижних левой и правой кнопок включает одновременное вращение назад левого и правого мотора, робот двигается назад прямолинейно (Рис.
 7 поз. 2 значение: 8)
7 поз. 2 значение: 8) - Если не нажата ни одна кнопка маяка – робот останавливается (Рис. 7 поз. 2 значение: 0).
При разработке алгоритма дистанционного управления вы должны знать следующее: когда нажата одна из комбинаций серых кнопок – инфракрасный маяк непрерывно посылает соответствующий сигнал, если кнопки отпущены, то отправка сигнала прекращается. Исключение составляет отдельная горизонтальная серая кнопка (Рис. 7 поз 2 значение: 9). Эта кнопка имеет два состояния: “ВКЛ” – “ВЫКЛ”. Во включенном состоянии маяк продолжает посылать сигнал, даже если вы отпустите кнопку (о чём сигнализирует загорающийся зеленый светодиод), чтобы выключить отправку сигнала в этом режиме – нажмите горизонтальную серую кнопку еще раз.
Приступим к реализации программы:
Наш алгоритм дистанционного управления предусматривает 5 вариантов поведения, соответственно наш программный блок “Переключатель” будет состоять из пяти программных контейнеров. Займемся их настройкой.
- Вариантом по умолчанию назначим вариант, когда не нажата ни одна кнопка (Рис. 7 поз. 2 значение: 0). Установим в контейнер программный блок “Независимое управление моторами”, выключающий моторы “B” и “C”.
- В контейнер варианта нажатия верхней левой кнопки (Рис. 7 поз. 2 значение: 1) установим программный блок “Большой мотор”, включающий мотор “B”.
- В контейнер варианта нажатия верхней правой кнопки (Рис. 7 поз. 2 значение: 3) установим программный блок “Большой мотор”, включающий мотор “C”.
- В контейнер варианта одновременного нажатия верхних левой и правой кнопок (Рис. 7 поз. 2 значение: 5) установим программный блок “Независимое управление моторами”, включающий вращение моторов “B” и “C” вперед.

- В контейнер варианта одновременного нажатия нижних левой и правой кнопок (Рис. 7 поз. 2 значение: 8) установим программный блок “Независимое управление моторами”, включающий вращение моторов “B” и “C” назад.
- Поместим наш настроенный программный блок “Переключатель” внутрь программного блока “Цикл”.
По предложенной схеме попробуйте создать программу самостоятельно, не подглядывая в решение!
Решение Задачи №18 Рис. 8
Загрузите получившуюся программу в робота и запустите её на выполнение. Попробуйте управлять роботом с помощью инфракрасного маяка. Всё ли у вас получилось? Понятен ли вам принцип реализации дистанционного управления? Попробуйте реализовать дополнительные варианты управления. Напишите свои впечатления в комментарии к этому уроку.
* Хотите увидеть невидимые волны? Включите режим фотосъемки в мобильном телефоне и поднесите излучающий элемент дистанционного пульта от телевизора к объективу мобильного телефона. Нажимайте кнопки пульта дистанционного управления и на экране телефона наблюдайте свечение инфракрасных волн.
Нажимайте кнопки пульта дистанционного управления и на экране телефона наблюдайте свечение инфракрасных волн.
Блоки ТРИК – Руководство по работе с TRIK Studio
Специализированные блоки для ТРИК делятся на три категории:
Действия — блоки, выполняющие какое-либо действие на контроллере: включение моторов, проигрывание звука и т. д.
Ожидания — блоки, ждущие наступления какого-либо события: определённых показаний датчиков, нажатия на кнопку и т. д.
Рисования — блоки, используемые для вывода графики и текста на экран.
Блоки, доступные для всех платформ см. в статье
Отправить сообщение в задачу
Отправить сообщение в задачу
Отправляет данное сообщение в параллельную задачу с заданным идентификатором (идентификатор должен быть указан при создании задачи в блоке «Параллельные задачи»). В качестве сообщения может быть любое выражение.
Получить код кнопки
Получить код кнопки
Сохраняет в указанную переменную код нажатой на роботе кнопки. Свойство «Ожидание» позволяет дождаться или не дожидаться, когда кнопка действительно будет нажата. Если нажатия кнопки блок не дожидается и кнопка не нажата, переменной присваивается значение «-1».
Играть звук
Проигрывает на контроллере звук с заданной частотой и длительностью.
Играть звуковой файл
Играть звуковой файл
Проиграть на контроллере заданный звуковой файл. Файл должен быть заранее загружен на контроллер. Путь до файла указывается относительно папки trik на контроллере. Загрузить файл на контроллер можно, например, с помощью программы WinSCP.
Загрузить файл на контроллер можно, например, с помощью программы WinSCP.
Моторы вперёд
Моторы вперед
Включить моторы по заданным портам с заданной мощностью. Порты задаются строками M1, M2, M3 и M4, разделенными запятыми. Мощность задается в процентах числом от -100 до 100. Если задано отрицательное значение, мотор включается в режиме реверса.
Моторы назад
Включить моторы в режиме реверса по заданным портам с заданной мощностью. Параметры аналогичны параметрами блока «Моторы вперёд».
Моторы стоп
Выключить моторы по заданным портам. Порты задаются строками M1, M2, M3 и M4, разделенными запятыми.
Сбросить показания энкодера
Сбросить показания энкодера
Сбросить показания количества оборотов моторов по указанным портам. Порты задаются строками E1, E2, E3 и E4, разделенными запятыми.
Порты задаются строками E1, E2, E3 и E4, разделенными запятыми.
Угловой сервомотор
Угловой сервомотор
Установить валы угловых сервомоторов на указанных портах в указанное положение (в градусах, от -90 до 90). Порты задаются строками, разделенными запятыми.
Сказать
Произнести с помощью динамика фразу, переданную в качестве аргумента блока.
Светодиод
Установить указанный цвет светодиода на корпусе контроллера.
Системный вызов
Системный вызов
Блок имеет логический параметр «Код». Если он имеет значение «Истина», содержимое параметра «Команда» генерируется напрямую в текст программы при генерации этого блока. Если «Ложь», генерируется вызов консольной команды операционной системы.
Если «Ложь», генерируется вызов консольной команды операционной системы.
Включить видеокамеру
Включить видеокамеру
Включить видеокамеру на контроллере в одном из трёх режимов:
Сенсор линии — детектирует цветную линию в центре кадра и в дальнейшем возвращает отклонение центра линии от центра кадра, как число в интервале от -100 (влево) до 100 (вправо).
Сенсор объекта — детектирует контрастный объект в центре кадра и в дальнейшем возвращает координаты его центра и диаметр в пикселях.
Сенсор цвета — возвращает доминирующий цвет в центре кадра в виде его координат в цветовой шкале RGB.
Детектировать по камере
Детектировать по камере
Фиксирует изображение в центре кадра и инициализирует им датчик линии или датчик объекта. Камера должна быть включена в соответствующем режиме блоком «Включить видеокамеру».
Датчик линии в переменную
Датчик линии в переменную
Помещает текущее показание датчика линии в указанную переменную. Камера должна быть включена в режиме датчика линии блоком «Включить видеокамеру» и инициализирована блоком «Детектировать по камере».
Запустить видеотрансляцию
Запустить видеотрансляцию
Запускает видеотрансляцию на роботе. Видео может быть просмотрено на пульте управления ТРИК или в браузере по адресу вида: {ip-адрес робота}:8080/?action=stream/.
Послать сообщение
Послать сообщение
Отправляет данное сообщение роботу с данным бортовым номером. Робот должен быть в той же сети, что и робот, отправляющий сообщение, и зарегистрирован как ведущий или ведомый с помощью меню Настройки → Сообщения на роботе. Если роботов с данным бортовым номером в сети несколько, сообщение получат все они.
Записать в файл
Записать в файл
Записывает значение данного выражения в заданный файл на роботе. Путь до файла может быть абсолютным или относительно папки с trik-studio.exe. Файл можно получить с контроллера, например, с помощью программы WinSCP для Windows или scp для Linux.
Удалить файл
Удаляет заданный файл на роботе. Путь до файла может быть абсолютным или относительно папки с
Путь до файла может быть абсолютным или относительно папки с trik-studio.exe.
Выключить видеокамеру
Выключить видеокамеру
Выключает видеокамеру.
Отключить видеотрансляцию
Отключить видеотрансляцию
Останавливает видеотрансляцию с камеры робота.
Калибровка гироскопа
Калибровка гироскопа
Устанавливает гироскоп в 0 в текущей позиции.
Получить сообщение из другой задачи
Получить сообщение из другой задачи
Ждать получения сообщения из другой параллельной задачи. Когда сообщение будет получено, оно будет присвоено указанной в блоке переменной. Свойство «Дождаться сообщения» позволяет указать, что делать, если очередь сообщений пуста: дождаться прихода нового сообщения или продолжить работу, присвоив переменной пустую строку. Сообщение автоматически приводится к типу, соответствующему типу переменной-приёмника. Пример: если вы посылаете число в виде строки, то оно будет принято как число.
Свойство «Дождаться сообщения» позволяет указать, что делать, если очередь сообщений пуста: дождаться прихода нового сообщения или продолжить работу, присвоив переменной пустую строку. Сообщение автоматически приводится к типу, соответствующему типу переменной-приёмника. Пример: если вы посылаете число в виде строки, то оно будет принято как число.
Пользовательский ввод
Пользовательский ввод
Ждать ввода значения от пользователя. После ввода значение будет присвоено указанной в блоке переменной.
Блок «Пользовательский ввод» имеет 3 свойства:
Пример
Ждать гиродатчик
Ждать гиродатчик
Ждать, пока значение, возвращаемое гиродатчиком на указанном порту, не будет сравнимо с указанным в значении параметра «градусы».
Ждать датчик касания
Ждать датчик касания
Ждать срабатывания датчика касания на указанном порту.
Ждать свет
Ждать, пока значение, возвращаемое сенсором света на указанном порту, не будет сравнимо с указанным значением в параметре «Проценты». Параметры: «Проценты» — значение для сравнения со значением, возвращаемым датчиком света. «Порт» — порт, к которому подключен сенсор света. «Считанное значение» — операция, которая будет использоваться для сравнения со значением параметра «Проценты».
Ждать УЗ датчик расстояния
Ждать УЗ датчик расстояния
Ждать, пока расстояние, возвращаемое ультразвуковым сенсором расстояния, не будет сравнимо со значением, указанным в параметре «Расстояние» (расстояние задается в сантиметрах, от 0 до 300).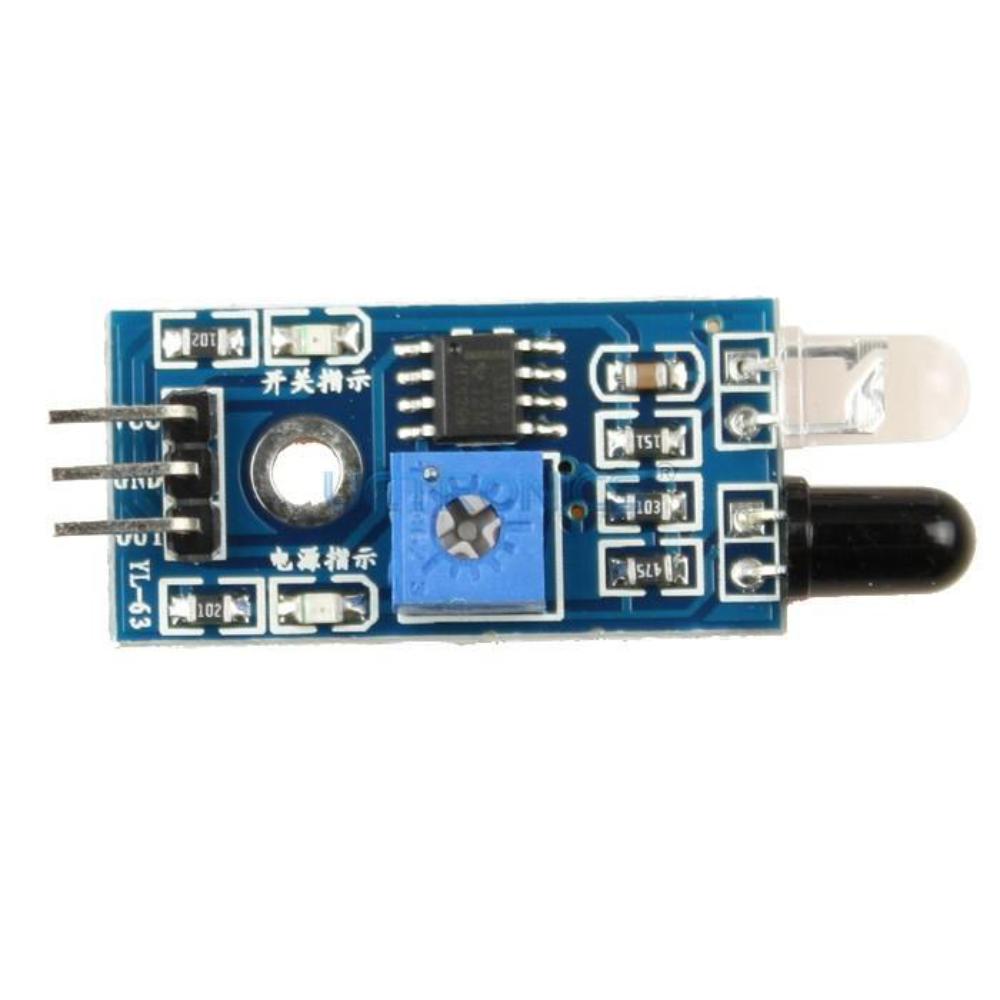 Параметры:
«Расстояние» — значение для сравнения со значением, возвращаемым датчиком расстояния.
«Порт» — порт, к которому подключен датчик расстояния.
«Считанное значение» — операция, которая будет использоваться для сравнения со значением параметра «Расстояние».
Параметры:
«Расстояние» — значение для сравнения со значением, возвращаемым датчиком расстояния.
«Порт» — порт, к которому подключен датчик расстояния.
«Считанное значение» — операция, которая будет использоваться для сравнения со значением параметра «Расстояние».
Ждать ИК датчик расстояния
Ждать ИК датчик расстояния
Ждать, пока расстояние, возвращаемое инфракрасным сенсором расстояния, не будет сравнимо с указанным в значении параметра «Расстояние». По умолчанию на портах A1 и A2 расстояние задается в сантиметрах (от 0 до 100), к остальным подключение не рекомендуется, так как чистое значение с датчика будет обработано с ожиданием другого подключенного датчика. Еще один параметр — номер порта, к которому подключен датчик расстояния. Также параметром указывается операция, которая будет использоваться для сравнения с введенным расстоянием.
Ждать энкодер
Ждать энкодер
Ждать, пока показания счетчика количества оборотов на заданном порту не станут больше или меньше указанного в значении параметра «Предел оборотов».
Ждать нажатия кнопки
Ждать нажатия кнопки
Ждать, пока не будет нажата указанная кнопка на корпусе робота.
Получить сообщение
Получить сообщение
Ждать получения сообщения через систему почтовых ящиков. Когда сообщение будет получено, оно будет помещено в указанную в параметре блока переменную. Свойство «Дождаться сообщения» позволяет указать, что делать, если очередь сообщений пуста: дождаться прихода нового сообщения или продолжить работу, положив в переменную пустую строку. Сообщение автоматически приводится к типу, соответствующему типу переменной-приёмника, то есть, например, можно послать число в виде строки и принять его как число.
Ждать кнопки на пульте
Ждать кнопки на пульте
Ждать нажатия на кнопку на пульте, подключённом к роботу. Кнопки имеют номера от 1 до 5.
Ждать нажатия на пульт
Ждать нажатия на пульт
Ждать нажатия на одну из двух активных областей пульта, подключённого к роботу. Координаты нажатия можно получить с помощью сенсорных переменных «gamepadPad».
Ждать «руля» на пульте
Ждать «руля» на пульте
Ждать нужного наклона пульта, подключённого к роботу. Наклон регистрируется только если на пульте включён режим «руля», угол наклона кодируется числами от -100 (максимально влево) до 100 (максимально вправо). Также параметром указывается операция, которая будет использоваться для сравнения со значением параметра «Угол».
Ждать отключения пульта
Ждать отключения пульта
Ждать, пока пульт не отключится от робота. Если пульт не подключен, программа продолжит выполнение.
Если пульт не подключен, программа продолжит выполнение.
Ждать подключения пульта
Ждать подключения пульта
Ждать, пока к роботу не подключится пульт. Если пульт уже подключен, программа продолжит выполнение.
Цвет кисти
Указать цвет, которым будут рисоваться простые графические фигуры на экране робота.
Ширина кисти
Указать ширину линии, которой будут рисоваться простые графические фигуры на экране робота.
Нарисовать точку
Нарисовать точку
Нарисовать на экране точку в указанных координатах.
Нарисовать линию
Нарисовать линию
Нарисовать на экране отрезок. В качестве параметров блоку указываются концы отрезка.
В качестве параметров блоку указываются концы отрезка.
Нарисовать прямоугольник
Нарисовать прямоугольник
Нарисовать на экране прямоугольник. В качестве параметров указываются координаты левого верхнего угла, ширина и высота прямоугольника.
Нарисовать эллипс
Нарисовать эллипс
Нарисовать на экране эллипс, вписанный в заданный прямоугольник.
Нарисовать дугу
Нарисовать дугу
Нарисовать на экране дугу, заданную координатами прямоугольника, в который она будет вписана, и углами (в градусах) её начала и конца на окружности. Если начало и конец совпадают, будет нарисована окружность.
Смайлик
Нарисовать на экране смайлик.![]()
Грустный смайлик
Грустный смайлик
Нарисовать на экране грустный смайлик.
Цвет фона
Задаёт цвет фона экрана.
Напечатать текст
Напечатать текст
Печатает заданную строку в заданном месте на экране робота.
Как вывести текст на экран?
Для вывода текста:
В свойстве «Текст» напишите нужный текст.
Уберите галочку в свойстве «Вычислять».
Как вывести значение переменной на экран?
Для вывода значения переменной:
В свойстве «Текст» напишите имя переменной.

Поставьте галочку в свойстве «Вычислять».
Очистить экран
Очистить экран
Стереть всё, что нарисовано на экране.
| TMF8701 | Датчик времени пролета с интегрированным ИК-лазером VCSEL 940 нм в оптическом модуле 2,2 мм x 3,6 мм x 1,0 мм 1,8 В I²C | 2,7 – 3,3 | 1,8 В | Настройка режима, частота повторения, прерывание | Устойчивость к окружающему свету (от 100к люкс до 0 люкс) | 60 | -30 до 70 | OLGA, количество выводов 12 | TMF8701 | |||
| TSL26721 | Цифровой датчик приближения, LED drvr. , Интерфейс Vdd I2C , Интерфейс Vdd I2C | 2,4 – 3,6 | VDD | Коэффициент усиления, время интегрирования, прерывание | от 30 до 70 | FN, количество выводов 6 | TSL26721 | |||||
| TSL26711 | Цифровой датчик приближения, LED drvr. , Интерфейс Vdd I2C , Интерфейс Vdd I2C | 2,6 – 3,6 | VDD | Коэффициент усиления, время интегрирования, прерывание | от -40 до 85 | FN, количество выводов 8 | TSL26711 | |||||
| TMF8805 | Датчик времени пролета с интегрированным ИК-лазером VCSEL на 940 нм в 2.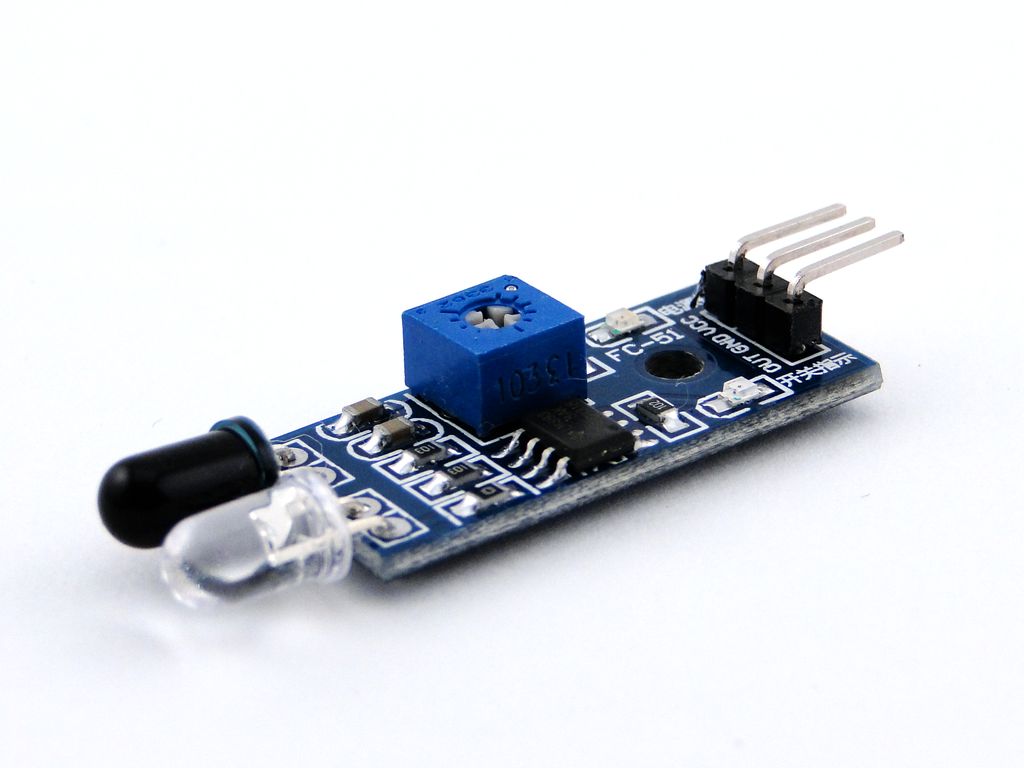 Оптический модуль 2 мм x 3,6 мм x 1,0 мм 1,8 В I²C Оптический модуль 2 мм x 3,6 мм x 1,0 мм 1,8 В I²C | 2,7 – 3,3 | 1,8 | Настройка режима, частота повторения, прерывание | Устойчивость к окружающему свету (от 100к люкс до 0 люкс) | 2 – 250 | -30 до 70 | OLGA, количество выводов 12 | TMF8805 | |||
| TMF8801 | Датчик времени пролета с интегрированным ИК-лазером VCSEL на 940 нм в 2. Оптический модуль 2 мм x 3,6 мм x 1,0 мм 1,8 В I²C Оптический модуль 2 мм x 3,6 мм x 1,0 мм 1,8 В I²C | 2,7 – 3,3 | 1,8 В | Настройка режима, частота повторения, прерывание | Устойчивость к окружающему свету (от 100к люкс до 0 люкс) | 2 – 250 | -30 до 70 | OLGA, количество выводов 12 | TMF8801 | |||
| TMD26723 | Цифровой датчик приближения, драйвер светодиода и ИК-светодиод в оптическом модуле 1. Интерфейс 8V I2C Интерфейс 8V I2C | 2,6 – 3,6 | 1,8 В | Прерывание | ИК-светодиод | от -40 до 85 | Модуль для поверхностного монтажа, количество контактов 8 | TMD26723 | ||||
| TMD26721 | Цифровой датчик приближения, драйвер светодиода и ИК-светодиод в оптическом модуле Интерфейс Vdd I2C | 2.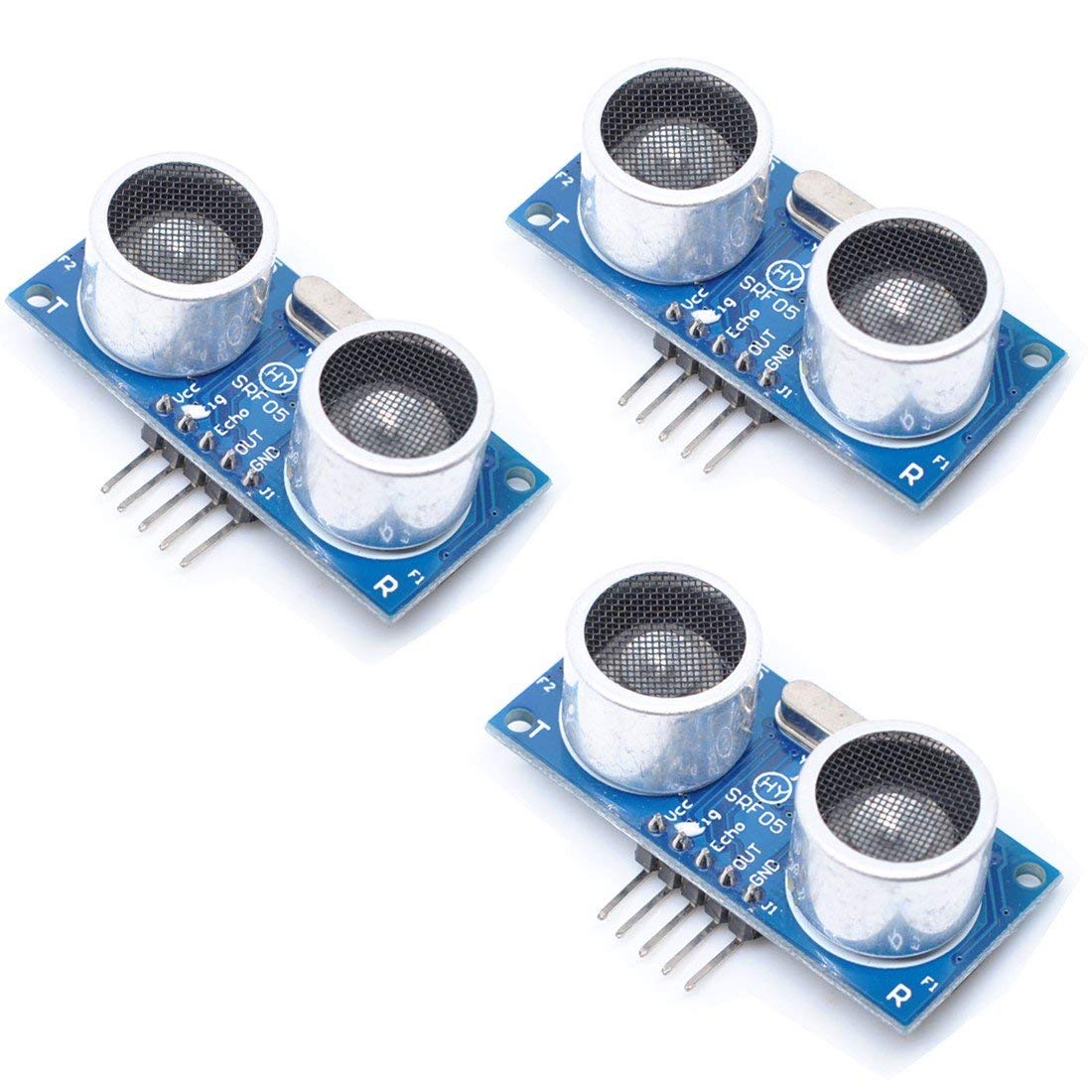 6 – 3,6 6 – 3,6 | VDD | Прерывание | ИК-светодиод | от -40 до 85 | Модуль для поверхностного монтажа, количество контактов 8 | TMD26721 | ||||
| TMD2635 | Сверхмалый модуль обнаружения приближения 2-в-1 1. 8 В I²C 8 В I²C | 1,7 – 2,0 | 1,8 В | Коэффициент усиления, время интегрирования, прерывание | ИК VCSEL | -30 до 85 | OLGA, количество выводов 6 | TMD2635 | ||||
| TMD2620 | Модуль обнаружения приближения с малой апертурой 2-в-1 | 1. 7-2,0 7-2,0 | 1,8 В | Коэффициент усиления, время интегрирования, прерывание | ИК-светодиод | -30 до 85 | Модуль для поверхностного монтажа, количество контактов 8 | TMD2620 | ||||
| TMD2636 | Низкопрофильный модуль обнаружения приближения 2-в-1 1. 8 В I²C 8 В I²C | 1,7 -2,0 | 1,8 | Усиление, ширина импульса, количество импульсов, ток VCSEL, прерывание | ИК VCSEL | -30 до 85 | OLGA, количество выводов 6 | TMD2636 |
| Форма | 6. 0 Ш x 6,95 В x 5,6 Г 0 Ш x 6,95 В x 5,6 Г | 38 | 12 | 0,4 | 45 | 0,7 | 1 = ВЫХОД, 2 = ЗЕМЛЯ, 3 = V S | Датчики присутствия, быстрые датчики приближения | свинцово-кислотный | |||
| Форма | 6.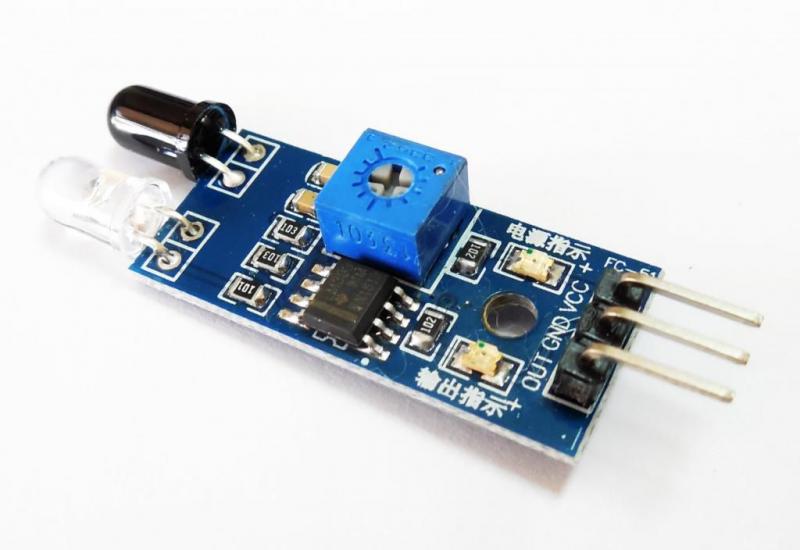 0 Ш x 6,95 В x 5,6 Г 0 Ш x 6,95 В x 5,6 Г | 38 | 2,4 | 7 | 45 | 0,7 | 1 = ВЫХОД, 2 = ЗЕМЛЯ, 3 = V S | Датчики присутствия, быстрые датчики приближения | свинцово-кислотный | |||
| Форма | 6. 0 Ш x 6,95 В x 5,6 Г 0 Ш x 6,95 В x 5,6 Г | 38 | 24 | 0,12 | 45 | 0,7 | 1 = ВЫХОД, 2 = ЗЕМЛЯ, 3 = V S | Датчики приближения | свинцово-кислотный | |||
| Минимальный | 6. 0 Ш x 6,95 В x 5,6 Г 0 Ш x 6,95 В x 5,6 Г | 38 | 12 | 0,4 | 45 | 0,7 | 1 = ВЫХОД, 2 = ЗЕМЛЯ, 3 = V S | Датчики присутствия, быстрые датчики приближения | свинцово-кислотный | |||
| Минимальный | 6. 0 Ш x 6,95 В x 5,6 Г 0 Ш x 6,95 В x 5,6 Г | 38 | 12 | 0,4 | 45 | 0,7 | 1 = ВЫХОД, 2 = ЗЕМЛЯ, 3 = V S | Датчики присутствия, быстрые датчики приближения | SMD | |||
| Минимальный | 6. 0 Ш x 6,95 В x 5,6 Г 0 Ш x 6,95 В x 5,6 Г | 38 | 12 | 0,4 | 45 | 0,7 | 1 = ВЫХОД, 2 = ЗЕМЛЯ, 3 = V S | Датчики присутствия, быстрые датчики приближения | SMD | |||
| Белобог | 3.95 Ш x 3,95 В x 0,8 Г | 38 | 8 | 0,7 | 75 | 0,7 | 1, 4 = GND, 2 = V S , 3 = OUT | Датчики присутствия, быстрые датчики приближения | SMD | |||
| Щит Белобога | 3.95 Ш x 3,95 В x 1,0 Г | 38 | 8 | 0,7 | 75 | 0,7 | 1 = ВЫХОД, 2, 3, 6, 7, 8 = GND, 4, 5 = V S | Датчики присутствия, быстрые датчики приближения | SMD | |||
| Белобог | 3.95 Ш x 3,95 В x 0,8 Г | 38 | 18 | 0,2 | 75 | 0,7 | 1 = ВЫХОД, 2, 3, 6, 7, 8 = GND, 4, 5 = V S | Датчики приближения | SMD | |||
| Minicast | 5.0 Ш x 6,95 В x 4,8 Г | 38 | 8 | 0,7 | 45 | 0,7 | 1 = ВЫХОД, 2 = ЗЕМЛЯ, 3 = V S | Датчики присутствия, быстрые датчики приближения | свинцово-кислотный | |||
| Minicast | 5.0 Ш x 6,95 В x 4,8 Г | 38 | 18 | 0,2 | 45 | 0,7 | 1 = ВЫХОД, 2 = ЗЕМЛЯ, 3 = V S | Датчики приближения | свинцово-кислотный | |||
| Панхэд | 7.5 Ш x 5,3 В x 4,0 Г | 38 | 8 | 0,7 | 50 | 0,7 | 1 = GND, 2 = N.C., 3 = V S , 4 = OUT | Датчики присутствия, быстрые датчики приближения | SMD | |||
| Панхэд | 7.5 Ш x 5,3 В x 4,0 Г | 38 | 18 | 0,2 | 45 | 0,7 | 1 = GND, 2 = N.C., 3 = V S , 4 = OUT | Датчики приближения | SMD | |||
| Хеймдалль | 6.8 Ш x 3,0 В x 3,2 Г | 38 | 8 | 0,7 | 50 | 0,7 | 1, 4 = GND, 2 = V S , 3 = OUT | Датчики присутствия, быстрые датчики приближения | SMD | |||
| Хеймдалль | 6.8 Ш x 3,0 В x 3,2 Г | 38 | 18 | 0,2 | 50 | 0,7 | 1, 4 = GND, 2 = V S , 3 = OUT | Датчики приближения | SMD | |||
| Минимальный | 5.4 Ш x 6,35 В x 4,9 Г | 38 | 12 | 0,4 | 45 | 0,37 | 1 = ВЫХОД, 2 = ЗЕМЛЯ, 3 = V S | Датчики присутствия, быстрые датчики приближения | свинцово-кислотный | |||
| Минимальный | 5.4 Ш x 6,35 В x 4,9 Г | 38 | 12 | 0,4 | 45 | 0,37 | 1 = ВЫХОД, 2 = ЗЕМЛЯ, 3 = V S | Датчики присутствия, быстрые датчики приближения | SMD | |||
| Форма | 6.0 Ш x 6,95 В x 5,6 Г | 38 | 12 | 0,1 | 45 | 0,37 | 1 = ВЫХОД, 2 = ЗЕМЛЯ, 3 = V S | Датчики присутствия, быстрые датчики приближения | свинцово-кислотный | |||
| Хеймдалль | 6.8 Ш x 3,0 В x 3,2 Г | 38 | 8 | 0,7 | 50 | 0,37 | 1, 4 = GND, 2 = V S , 3 = OUT | Датчики присутствия, быстрые датчики приближения | SMD | |||
| Панхэд | 7.5 Ш x 5,3 В x 4,0 Г | 38 | 8 | 0,7 | 50 | 0,37 | 1 = GND, 2 = N.C., 3 = V S , 4 = OUT | Датчики присутствия, быстрые датчики приближения | SMD | |||
| Minicast | 5.0 Ш x 6,95 В x 4,8 Г | 38 | 8 | 0,7 | 45 | 0,37 | 1 = ВЫХОД, 2 = ЗЕМЛЯ, 3 = V S | Датчики присутствия, быстрые датчики приближения | свинцово-кислотный | |||
| Форма | 6.0 Ш x 6,95 В x 5,6 Г | 56 | 12 | 0,4 | 45 | 0,7 | 1 = ВЫХОД, 2 = ЗЕМЛЯ, 3 = V S | Датчики присутствия, быстрые датчики приближения | свинцово-кислотный | |||
| Форма | 6.0 Ш x 6,95 В x 5,6 Г | 56 | 2,4 | 7 | 45 | 0,7 | 1 = ВЫХОД, 2 = ЗЕМЛЯ, 3 = V S | Датчики присутствия, быстрые датчики приближения | свинцово-кислотный | |||
| Минимальный | 6.0 Ш x 6,95 В x 5,6 Г | 56 | 12 | 0,4 | 45 | 0,7 | 1 = ВЫХОД, 2 = ЗЕМЛЯ, 3 = V S | Датчики присутствия, быстрые датчики приближения | свинцово-кислотный | |||
| Минимальный | 6.0 Ш x 6,95 В x 5,6 Г | 56 | 12 | 0,4 | 45 | 0,7 | 1 = ВЫХОД, 2 = ЗЕМЛЯ, 3 = V S | Датчики присутствия, быстрые датчики приближения | SMD | |||
| Минимальный | 6.0 Ш x 6,95 В x 5,6 Г | 56 | 12 | 0,4 | 45 | 0,7 | 1 = ВЫХОД, 2 = ЗЕМЛЯ, 3 = V S | Датчики присутствия, быстрые датчики приближения | SMD | |||
| Белобог | 3.95 Ш x 3,95 В x 0,8 Г | 56 | 8 | 0,7 | 75 | 0,7 | 1, 4 = GND, 2 = V S , 3 = OUT | Датчики присутствия, быстрые датчики приближения | SMD | |||
| Щит Белобога | 3.95 Ш x 3,95 В x 1,0 Г | 56 | 8 | 0,7 | 75 | 0,7 | 1 = ВЫХОД, 2, 3, 6, 7, 8 = GND, 4, 5 = V S | Датчики присутствия, быстрые датчики приближения | SMD | |||
| Minicast | 5.0 Ш x 6,95 В x 4,8 Г | 56 | 8 | 0,7 | 45 | 0,7 | 1 = ВЫХОД, 2 = ЗЕМЛЯ, 3 = V S | Датчики присутствия, быстрые датчики приближения | свинцово-кислотный | |||
| Панхэд | 7.5 Ш x 5,3 В x 4,0 Г | 56 | 8 | 0,7 | 50 | 0,7 | 1 = GND, 2 = N.C., 3 = V S , 4 = OUT | Датчики присутствия, быстрые датчики приближения | SMD | |||
| Хеймдалль | 6.8 Ш x 3,0 В x 3,2 Г | 56 | 8 | 0,7 | 50 | 0,7 | 1, 4 = GND, 2 = V S , 3 = OUT | Датчики присутствия, быстрые датчики приближения | SMD | |||
| Минимальный | 5.4 Ш x 6,35 В x 4,9 Г | 56 | 12 | 0,4 | 45 | 0,37 | 1 = ВЫХОД, 2 = ЗЕМЛЯ, 3 = V S | Датчики присутствия, быстрые датчики приближения | свинцово-кислотный | |||
| Минимальный | 5.4 Ш x 6,35 В x 4,9 Г | 56 | 12 | 0,4 | 45 | 0,37 | 1 = ВЫХОД, 2 = ЗЕМЛЯ, 3 = V S | Датчики присутствия, быстрые датчики приближения | SMD | |||
| Форма | 6.0 Ш x 6,95 В x 5,6 Г | 56 | 12 | 0,1 | 45 | 0,37 | 1 = ВЫХОД, 2 = ЗЕМЛЯ, 3 = V S | Датчики присутствия, быстрые датчики приближения | свинцово-кислотный | |||
| Хеймдалль | 6.8 Ш x 3,0 В x 3,2 Г | 56 | 8 | 0,7 | 50 | 0,37 | 1, 4 = GND, 2 = V S , 3 = OUT | Датчики присутствия, быстрые датчики приближения | SMD | |||
| Панхэд | 7.5 Ш x 5,3 В x 4,0 Г | 56 | 8 | 0,7 | 50 | 0,37 | 1 = GND, 2 = N.C., 3 = V S , 4 = OUT | Датчики присутствия, быстрые датчики приближения | SMD | |||
| Minicast | 5.0 Ш x 6,95 В x 4,8 Г | 56 | 8 | 0,7 | 45 | 0,37 | 1 = ВЫХОД, 2 = ЗЕМЛЯ, 3 = V S | Датчики присутствия, быстрые датчики приближения | свинцово-кислотный | |||
| Держатель | 20.0 Ш x 13,65 В x 9,0 Г | н / д | Датчики присутствия, датчики приближения | свинцово-кислотный |
OSEPP – продукты, совместимые с Arduino
Модуль ИК-датчика приближения OSEPP измеряет расстояния.В нем используется измерительный сенсорный блок Sharp GP2Y0D805Z0F, который состоит из интегрированной комбинации фотодиода, инфракрасного излучающего диода и процессора сигналов. Цифровое значение датчика приближения считывается по шине I²C.
Модуль использует интерфейс I²C для передачи данных. Линии I²C объединены с линиями питания и заземления в модульный разъем, что позволяет легко подключать и работать. Есть два
разъемы на модуле для обеспечения последовательного подключения нескольких устройств I²C вместе.
Этот сенсорный модуль идеально подходит для конструкций, которым необходимо обнаруживать объекты в определенном диапазоне, или для конструкций, которым необходимо избегать препятствий. Его также можно использовать как бесконтактный переключатель.
Характеристики
- Plug and play с OSEPP I²C Expansion Shield
- Дальность обнаружения 0,5 – 5,0 см
- Поддерживает интерфейс I²C с 4 программируемыми 7-битными адресами (0x20, 0x22, 0x24, 0x26), что позволяет использовать до 4 модулей OSEPP IR Proximity Sensor на одной шине I²C.
- Обеспечивает сквозной разъем для поддержки последовательного подключения нескольких датчиков из семейства модулей датчиков OSEPP
- Обеспечивает 0.Разъемы 1 ”для подключения питания и контактов интерфейса I²C
| Адреса I²C (7 бит) | 0x20, 0x22, 0x24, 0x26 |
| Форм-фактор | 23 мм x 36 мм |
| Потребляемая мощность | 475 мВт |
| Определение выводов разъема | Контакт 1: Питание Контакт 2: данные I²C Контакт 3: Земля Контакт 4: I²C Clock |
| Загрузки | |
| Схема модуля ИК-датчика приближения OSEPP ™ (PDF) | |
| Код акции | Название продукта |
| PROX-01 | Модуль ИК-датчика приближения OSEPP ™ |
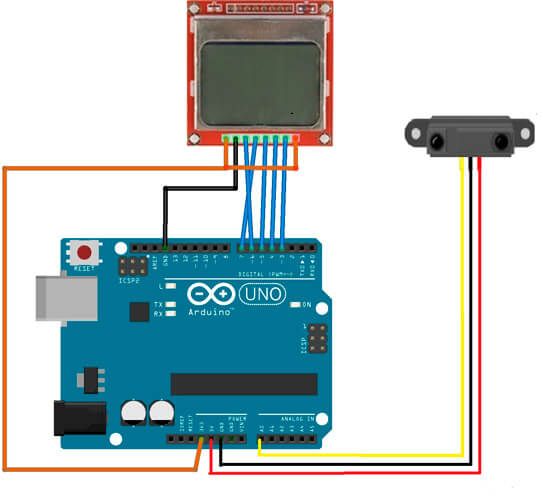
Инфракрасное измерение расстояния с помощью Raspberry Pi (Sharp GP2Y0A02YK0F)
Есть несколько инфракрасных датчиков расстояния от производителя Sharp, которыми можно очень просто управлять с Raspberry Pi.Существуют разные дальномеры, которые покрывают разные диапазоны расстояний. Эти модули работают аналогично лазерным дальномерам, но с инфракрасным светом. Там пучок света излучается передатчиком, а аналоговое напряжение передается через приемник на основе угла падения, посредством чего можно рассчитать расстояние.
В этом руководстве датчик расстояния GP2Y0A02YK0F показывает, как можно определить расстояние. Это может быть полезно, например, в автомобиле в качестве автомобильного ПК (расстояние до камеры заднего вида), в качестве автомобиля-робота или в контексте домашней автоматизации.
Необходимые детали оборудования – датчики расстояния
ИК-передатчик расположен на «выемчатой» стороне (справа).
В целом, Sharp предлагает несколько мер для измерения расстояния, и каждый из них следует искать индивидуально для решения конкретной задачи. Это руководство предназначено для Sharp GP2Y0A02YK0F, который подходит для диапазонов от 20 до 150 см. Расстояния вне этого диапазона измеряются неправильно.
Доступны следующие модули:
Если вы используете датчик, отличный от GP2Y0A02YK0F, вам может потребоваться отрегулировать шаги.Таблицы данных доступны на домашней странице Sharp.
Вам также понадобится:
Работа с инфракрасным датчиком расстояния
Для этого ИК-датчика требуется входное напряжение от 4,5 В до 5,5 В, поэтому он отлично работает с 5 В Raspberry Pi. Согласно таблице данных, на контакт данных подается разное напряжение в зависимости от того, насколько далеко находится объект, измеренный датчиком. Это видно на следующем графике:
На основании напряжения можно относительно точно определить расстояние от 15 до 150 см.20, так что 1024 области (0-1023). Если MCP3008 подключен к 3,3 В, сигнал 1 означает 0,00322 В (3,22 мВ). Поскольку шина SPI Raspberry Pi работает от 3,3 В, больше не нужно подавать питание, в противном случае GPIO могут быть повреждены.
Вся схема выглядит так:
| RaspberryPi | MCP3008 |
|---|---|
| Контакт 1 (3,3 В) | Контакт 16 (VDD) |
| Контакт 1 (3,3 В) | Контакт 15 (VREF) |
| Контакт 6 (GND) | Контакт 14 (AGND) |
| Контакт 23 (SCLK) | Контакт 13 (CLK) |
| Контакт 21 (MISO) | Контакт 12 (DOUT) |
| Контакт 19 (MOSI) | Контакт 11 (DIN) |
| Контакт 24 (CE0) | Контакт 10 (CS / SHDN) |
| Контакт 6 (GND) | Контакт 9 (DGND) |
Датчик расстояния имеет только три контакта: красный (5 В), черный (GND) и желтый, который является выводом данных и подключен к АЦП MCP3008.Для некоторых могут прозвучать сигналы тревоги и спросить, почему модуль 5 В подключен напрямую, хотя шина SPI Pi не должна получать входное напряжение более 3,3 В. В техническом паспорте указано, что выходное напряжение датчика никогда не превышает 3 В (см. График в техническом паспорте). Любой, кто боится, что что-то может случиться с Pi, может поставить перед ним делитель напряжения с 2 резисторами, но это снижает точность, а также мою использованную формулу придется пересчитывать. В моих тестах он никогда не достигал напряжения выше 2.7В (GP2Y0A02YK0F). Это может отличаться для других датчиков Sharp.
Программа для считывания расстояния
Для управления MCP3008 необходимо активировать шину SPI. Это работает следующим образом:
судо распи-конфиг
«8 дополнительных параметров» -> «A6 SPI» -> «Да».
После этого необходимо подтвердить перезагрузку.
В некоторых случаях модуль (spi-bcm2708) также необходимо указать в файле / etc / modules. Для этого просто позвоните
Судо нано / и т. Д. / Модули
и добавьте в конец следующую строку (если она не существует):
Теперь можно установить библиотеку spidev, если это еще не было сделано:
sudo apt-get install git python-dev git clone git: // github.com / doceme / py-spidev cd py-spidev / sudo python setup.py установить
Теперь, когда у нас установлены все необходимые пакеты, мы можем создать скрипт для измерения расстояния.
судо нано ir_distance.py
Скрипт имеет следующее содержание:
1 2 3 4 5 6 7 8 9 10 11 12 13 141384 14 18 | #! / Usr / bin / python import spidev spi = spidev.SpiDev () spi.open (0,0) spi.max_speed_hz = 1000000 def readChannel (канал): val = spi.xfer2 ([1, (8 + channel) << 4,0]) data = ((val [1] & 3) << 8) + val [2] вернуть данные if __name__ == “__main__”: v = (readChannel (0 ) /1023.0) * 3,3 dist = 16,2537 * v ** 4 – 129,893 * v ** 3 + 382,268 * v ** 2 – 512,611 * v + 301,439 print “Distanz:%.2f см “% расстояние |
Теперь мы можем сделать это с помощью ( sudo python ir_distance.py ), после того как мы нацелились на объект, расстояние выводится.
Что именно здесь происходит? Сначала считывается аналоговое значение (от 0 до 1023) (строка 15). Однако, поскольку мы хотим узнать напряжение, значение делится на 1023 и умножается на 3,3 (вольта).
Внимание: в этом случае мы знаем (согласно паспорту), что выходное напряжение никогда не превышает 2.8В, хотя мы питаем датчик от 5В. Другие модули (аналоговые и цифровые) часто возвращают сигналы с напряжением, равным приложенному напряжению. Несоблюдение этого правила может привести к повреждению Raspberry Pi.
В строке 16 скрипта я рассчитываю натяжение в сантиметрах. Я нашел здесь формулу и немного адаптировал ее. Для этого я протестировал разные расстояния и немного изменил коэффициенты, чтобы рассчитанное расстояние было максимально точным. Как я уже упоминал в начале, эта формула предназначена только для датчика Sharp GP2Y0A02YK0F.Поскольку другие датчики выдают аналоговые сигналы в аналогичном диапазоне, эту формулу необходимо скорректировать для соответствующих датчиков (если кто-то это сделает, я буду рад, если он разместит ее ниже).
В качестве альтернативы, можно также интерполировать между областями (лист данных), сохраняя все подсказки (вольты, расстояние) и считывая конкретное значение и вычисляя расстояние до измеренного напряжения с помощью линейной интерполяции.
Рано или поздно мне придется прикрепить такой модуль к внутренней части заднего стекла моей машины и иметь измеритель расстояния при парковке задним ходом – если кто-то еще не знает, что он может с ним сделать 😉
инфракрасный – датчик расстояния Sharp IR дает неверные показания
Я использую ИК-датчик расстояния SHARP GP2Y0A21YK0F.Согласно паспорту, график зависимости выходного напряжения от расстояния должен выглядеть следующим образом:
Я подключил датчик к источнику питания прямо с выхода Arduino 5V, поэтому источник питания относительно устойчив. Аналоговый выход датчика подключен к мультиметру для проверки выходного напряжения на различных расстояниях белого листа перед датчиком.
Пока белый лист находится на расстоянии примерно 45 см от датчика, датчик работает нормально. Показания мультиметра соответствуют кривой графика (за исключением показания 0 см).Но через 45 см напряжение повышается, а не снижается, пока не достигнет 1,57 В, когда перед датчиком нет никаких предметов.
Мои показания мультиметра следующие:
Расстояние [см] Напряжение [В]
0 1,7
5 3.10
10 2,45
15 1,9
20 1,36
25 1,17
30 1,05
35 1,02
40 1.00
45 1,01
50 1,03
55 1,06
60 1,10
65 1,12
70 1,16
75 1,21
80 1,25
бесконечность 1,57
Я понимаю, что для расстояний более 45 см показания могут быть неправильными из-за эффектов, вызванных окружающей средой (хотя моя среда тестирования – закрытая чистая комната, но все же может быть что-то вызывает неправильные показания).Что меня беспокоит больше всего, так это показания напряжения, когда в пределах досягаемости нет объектов. Датчик выдает 1,57 В, что соответствует напряжению диапазона 15-20 см, что может быть проблематичным для моего проекта, поскольку я собираюсь измерять расстояния в диапазоне 10-40 см.
Что может быть не так?
Линеаризация ИК-датчика дальности Sharp · limulo
6 августа 2017 г.Решительно проще линеаризовать ИК-датчик расстояния SHARP GP2Y0A21YK , чем любой другой ИК-датчик расстояния SHARP, просто потому, что он используется в качестве примера в этом техническом документе Acroname , и весь математический процесс там очень хорошо объяснен.
Вот формула линеаризации данных датчика:
, где представляет собой расстояние между препятствием и датчиком (выраженное в см, ), а соответствующее 10-битное значение напряжения АЦП, измеренное микроконтроллером.
Датчики разные? разные уравнения!
Теперь, если мы рассмотрим другой датчик расстояния Sharp IR, нам придется вычислить эту формулу самостоятельно. Возьмем, к примеру, GP2Y0A02YK0F :
этот датчик способен обнаруживать препятствия в диапазоне от 20 см до 150 см (как мы знаем из таблицы данных датчика).
Итак, чтобы получить формулу, нам сначала нужно составить таблицу, в которой у нас есть:
- в первом столбце расстояния – выраженные в см. – между датчиком и препятствием, в то время как этот находится все ближе и ближе к датчику;
- во втором столбце, соответствующее 10-битное значение напряжения, возвращенное преобразователем A2D микроконтроллера ().
вот таблица, которую я составил
| R (см) | A2D |
|---|---|
| 20 | 498 |
| 25 | 442 |
| 30 | 388 |
| 35 | 340 |
| 40 | 304 |
| 45 | 270 |
| 50 | 246 |
| 55 | 222 |
| 60 | 203 |
| 65 | 186 |
| 70 | 174 |
| 75 | 162 |
| 80 | 154 |
| 85 | 145 |
| 90 | 137 |
| 95 | 130 |
| 100 | 125 |
| 105 | 117 |
| 110 | 113 |
| 115 | 107 |
| 120 | 103 |
| 125 | 98 |
| 130 | 95 |
| 135 | 90 |
| 140 | 87 |
| 145 | 84 |
| 150 | 80 |
