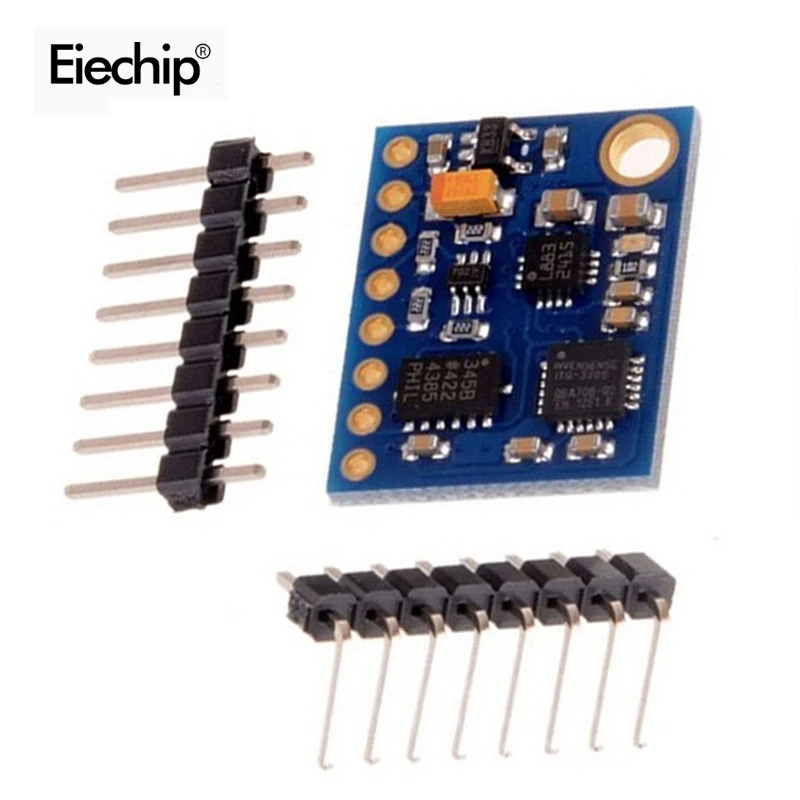
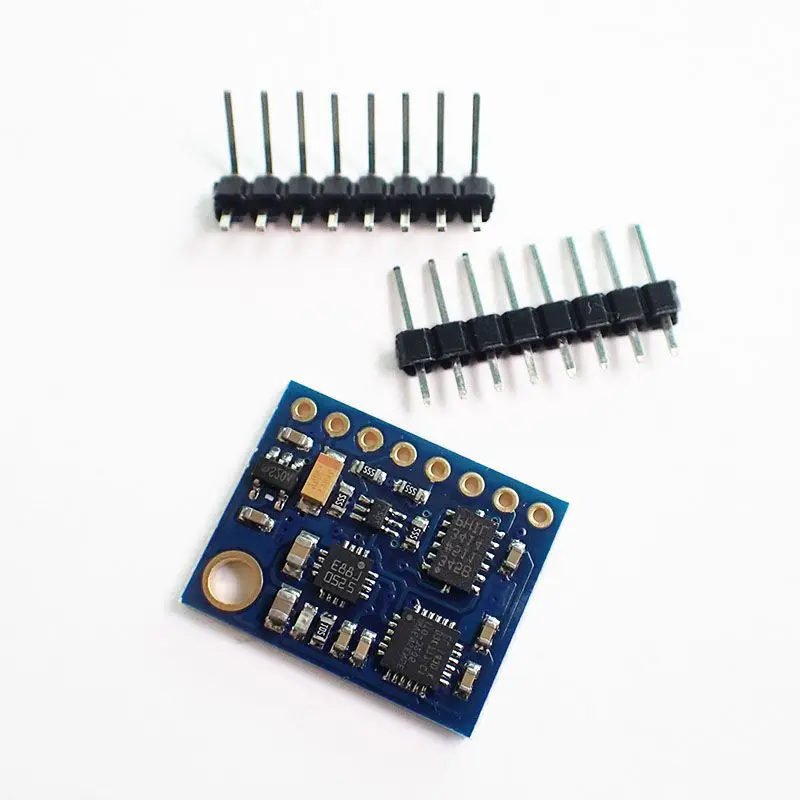
IMU-сенсор на 10 степеней свободы v2 (Troyka-модуль)
«Где я?» — насущный вопрос, который возникает изо дня в день. Опытный моряк смог бы определить положение по звёздам. А вот вашему квадрокоптеру или мобильному роботу нужна целая пачка датчиков для точного ответа на этот вопрос… Поэтому мы объединили их в один инерциальный модуль на 10 степеней свободы, который поможет вашему умному устройству надёжно отслеживать своё положение в пространстве!
Начинка
Для решения задачи инерциальной навигации мы расположили на плате четыре микросхемы от STMicroelectronics. Каждый МЭМС-датчик оснащён температурной компенсацией для точной работы в экстремальных условиях.
- Трёхосевой акселерометр LIS331DLH показывает ускорение относительно собственных осей X, Y и Z. Это помогает определить направление к центру Земли.
- Трёхосевой гироскоп I3G4250D показывает скорость вращения относительно собственных осей X, Y и Z.
- Трёхосевой магнитометр/компас LIS3MDL определяет напряженность магнитного поля относительно собственных осей.
- Барометр LPS25HB измеряет атмосферное давление и помогает вычислить высоту над уровнем моря.
Подключение
Модуль подключается к управляющим платам через две группы Troyka-контактов. Поскольку данные передаются через интерфейс I²C, то для передачи показаний всех сенсоров хватает всего двух контактов. При этом у каждой микросхемы есть свой индивидуальный адрес — подробности описаны в инструкции к датчику.
Верхняя группа
- Сигнальный (D) — линия данных шины I²C (SDA).
- Сигнальный (C) — линия тактирования шины I²C (SCL).
Нижняя группа
- Питание (V) — питание сенсора (3,3–5 В).
- Земля (G) — общая земля.
Мы поместили на модуль регулятор напряжения и специальный I²C-буфер. Поэтому вы можете смело использовать его с управляющей электроникой напряжением 3,3–5 В.
При подключении к Arduino или Iskra JS удобно использовать Troyka Shield. Полностью избавиться от проводов вам поможет плата расширения Troyka Slot Shield. Контактные ножки модуля также совместимы с breadboard’ом.
Контактные ножки модуля также совместимы с breadboard’ом.
Комплектация
- 1× IMU-сенсор v2
- 2× Трёхпроводной шлейф
Характеристики
- МЭМС-датчики: акселерометр, гироскоп, магнитометр, барометр
- Интерфейс: I²C
- Напряжение питания: 3,3–5 В
- Потребляемый ток: до 10 мА
- Габариты: 25,4×25,4×10,1 мм
Акселерометр LIS331DLH
- Диапазон измерений: ±2 / ±4 / ±8 g
- Максимальная чувствительность: 9,8×10-3 м/с²
- I²C-адрес:
- Без перемычки: 0x18
- С перемычкой: 0x19
Гироскоп I3G4250D
- Диапазон измерений: ±250 / ±500 / ±2000 град/сек
- Максимальная чувствительность: 8,7×10-3 град/сек
- I²C-адрес:
- Без перемычки: 0x68
- С перемычкой: 0x69
Магнитометр LIS3MDL
- Диапазон измерений: ±4 / ±8 / ±12 / ±16 Гс
- Максимальная чувствительность: 1,46×10-4 Гс
- I²C-адрес:
- Без перемычки: 0x1С
- С перемычкой: 0x1E
Барометр LPS25HB
- Диапазон измерений: 260–1260 мбар
- Максимальная чувствительность: 2,4×10-4 мбар
- I²C-адрес:
- Без перемычки: 0x5С
- С перемычкой: 0x5D
Ресурсы
Видеообзор IMU-сенсора:
инструкция, схемы и примеры использования [Амперка / Вики]
import processing.serial.*; import toxi.geom.*; import toxi.processing.*; // NOTE: requires ToxicLibs to be installed in order to run properly. // 1. Download from http://toxiclibs.org/downloads // 2. Extract into [userdir]/Processing/libraries // (location may be different on Mac/Linux) // 3. Run and bask in awesomeness // The serial port Serial port; String message; float[] q = new float[4]; Quaternion quat = new Quaternion(1, 0, 0, 0); // New line character in ASCII final char newLine = '\n'; String [] massQ = new String [4]; float[] ypr = new float[3]; void setup() { // Size form 400x400 size(400, 400, P3D); // Open serial port // Replace "COM7" with the COM port on which your arduino is connected port = new Serial(this, "COM7", 9600); } void draw() { // Read and parse incoming serial message serialEvent(); // Set background to black background(0); printQuaternions(); printYawPitchRoll(); // Set position to centre translate(width / 2, height / 2); // Begin object pushMatrix(); float[] axis = quat.

toAxisAngle(); rotate(axis[0], axis[2], axis[3], axis[1]); // Draw main body in red drawBody(); // Draw front-facing tip in blue drawCylinder(); // Draw Triangles drawTriangles(); // Draw Quads drawQuads(); // End of object popMatrix(); // Send character 's' to Arduino port.write('s'); } void serialEvent() { // Read from port until new line (ASCII code 13) message = port.readStringUntil(newLine); if (message != null) { // Split message by commas and store in String array massQ = split(message, ","); q[0] = float(massQ[0]); q[1] = float(massQ[1]); q[2] = float(massQ[2]); q[3] = float(massQ[3]); } // Print values to console print(q[0]); print("\t"); print(q[1]); print("\t"); print(q[2]); print("\t"); print(q[3]); println("\t"); // Set our toxilibs quaternion to new data quat.set(q[0], q[1], q[2], q[3]); } void drawCylinder() { float topRadius = 0; float bottomRadius = 20; float tall = 20; int sides = 8; // Begin object pushMatrix(); translate(0, 0, -120); rotateX(PI/2); fill(0, 0, 255, 200); float angle = 0; float angleIncrement = TWO_PI / sides; beginShape(QUAD_STRIP); for (int i = 0; i < sides + 1; ++i) { vertex(topRadius * cos(angle), 0, topRadius * sin(angle)); vertex(bottomRadius * cos(angle), tall, bottomRadius * sin(angle)); angle += angleIncrement; } endShape(); // if it is not a cone, draw the circular top cap if (topRadius != 0) { angle = 0; beginShape(TRIANGLE_FAN); // Center point vertex(0, 0, 0); for (int i = 0; i < sides + 1; i++) { vertex(topRadius * cos(angle), 0, topRadius * sin(angle)); angle += angleIncrement; } endShape(); } // If it is not a cone, draw the circular bottom cap if (bottomRadius != 0) { angle = 0; beginShape(TRIANGLE_FAN); // Center point vertex(0, tall, 0); for (int i = 0; i < sides + 1; i++) { vertex(bottomRadius * cos(angle), tall, bottomRadius * sin(angle)); angle += angleIncrement; } endShape(); } popMatrix(); } void drawBody() { fill(255, 0, 0, 200); box(10, 10, 200); } void drawTriangles() { // Draw wings and tail fin in green fill(0, 255, 0, 200); beginShape(TRIANGLES); // Wing top layer vertex(-100, 2, 30); vertex(0, 2, -80); vertex(100, 2, 30); // Wing bottom layer vertex(-100, -2, 30); vertex(0, -2, -80); vertex(100, -2, 30); // Tail left layer vertex(-2, 0, 98); vertex(-2, -30, 98); vertex(-2, 0, 70); // Tail right layer vertex( 2, 0, 98); vertex( 2, -30, 98); vertex( 2, 0, 70); endShape(); } void drawQuads() { beginShape(QUADS); vertex(-100, 2, 30); vertex(-100, -2, 30); vertex( 0, -2, -80); vertex( 0, 2, -80); vertex( 100, 2, 30); vertex( 100, -2, 30); vertex( 0, -2, -80); vertex( 0, 2, -80); vertex(-100, 2, 30); vertex(-100, -2, 30); vertex(100, -2, 30); vertex(100, 2, 30); vertex(-2, 0, 98); vertex(2, 0, 98); vertex(2, -30, 98); vertex(-2, -30, 98); vertex(-2, 0, 98); vertex(2, 0, 98); vertex(2, 0, 70); vertex(-2, 0, 70); vertex(-2, -30, 98); vertex(2, -30, 98); vertex(2, 0, 70); vertex(-2, 0, 70); endShape(); } void printQuaternions() { // Set text mode to shape textMode(SHAPE); textSize(13); fill(255, 255, 255); text("Quaternions:", 20, 20, 10); text(q[0], 20, 40, 10); text(q[1], 20, 60, 10); text(q[2], 20, 80, 10); text(q[3], 20, 100, 10); } void printYawPitchRoll() { // Calculate yaw/pitch/roll angles ypr[0] = atan2(2*q[1]*q[2] - 2*q[0]*q[3], 2*q[0]*q[0] + 2*q[1]*q[1] - 1) * 57. 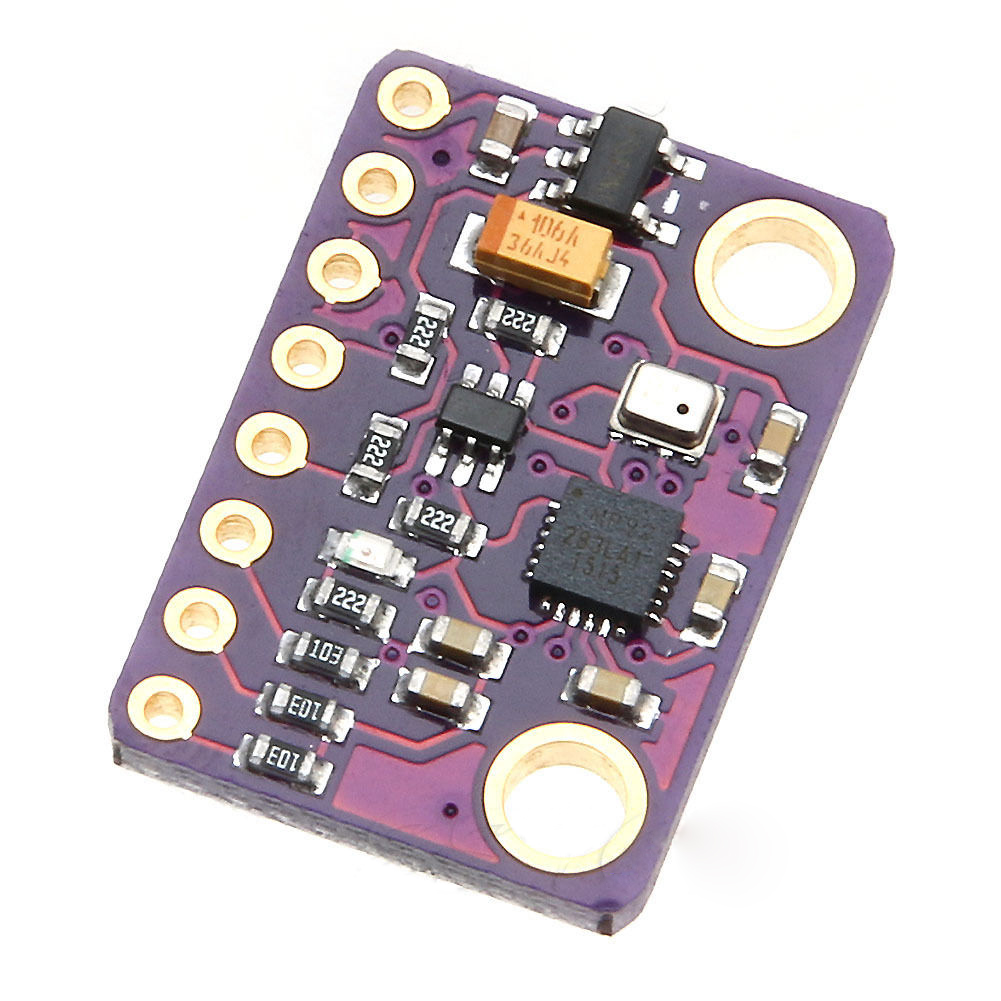
2; ypr[1] = atan2(2 * q[2] * q[3] - 2 * q[0] * q[1], 2 * q[0] * q[0] + 2 * q[3] * q[3] - 1) * 57.2; ypr[2] = -atan2(2 * (q[0] * q[2] - q[1] * q[3]), 1 - 2 * (q[2] * q[2] + q[1] *q[1])) * 57.2; text("Yaw:", 150, 20, 10); text(ypr[0], 150, 40, 10); text("Pitch:", 220, 20, 10); text(ypr[1], 220, 40, 10); text("Roll:", 290, 20, 10); text(ypr[2], 290, 40, 10); }
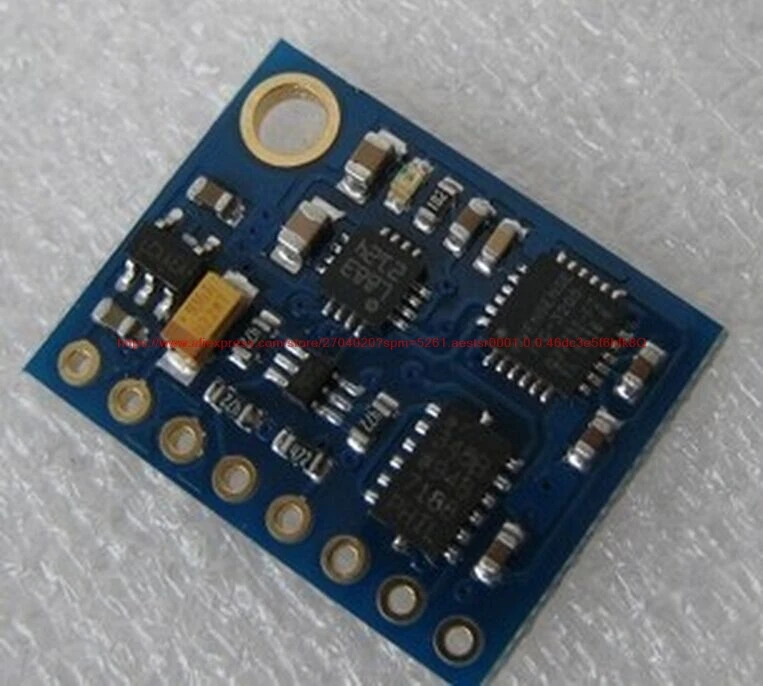
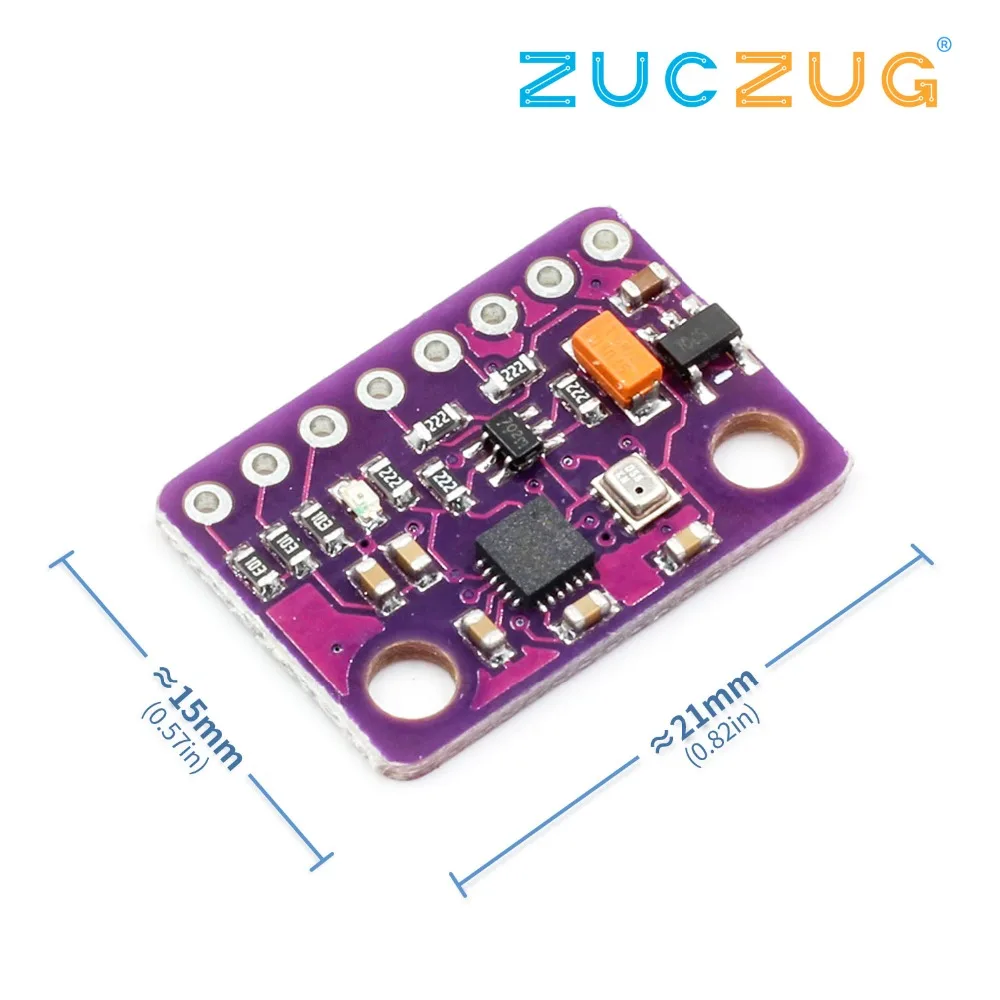
Инерциальный измерительный модуль с малым потреблением 10 DOF IMU Sensor [C]
10 DOF IMU Sensor [C] – инерциальный измерительный модуль с малым потреблением 10 DOF IMU Sensor [C]. Изделие предназначено для решения задач мониторинга движения, обнаружения и измерения параметров положения объекта, его высоты и температуры окружающей среды. 10 DOF IMU Sensor [C] обеспечивает хорошее взаимодействие «человек – машина», поэтому его с успехом можно применять при изготовлении собственного квадрокоптера, в роботехнике и т. д.
Модуль изготовлен на основе 9-осевого MEMS датчика MPU9255, интегрирующего в себе трехосевой гироскоп, трехосевой акселерометр, трехосевой компас и цифровой процессор движения.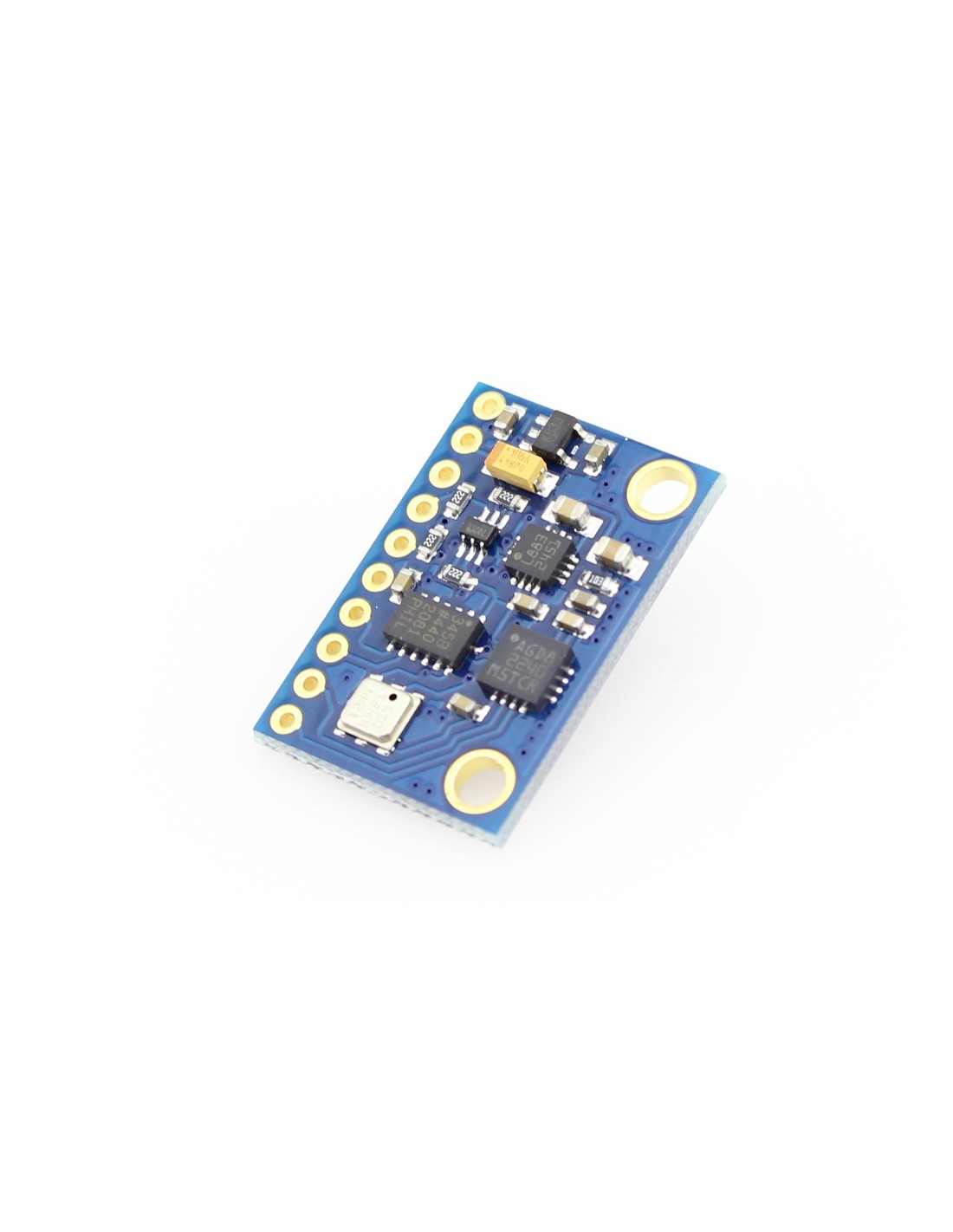 И все это в корпусе размером 3х3 мм.
И все это в корпусе размером 3х3 мм.
Кроме MPU9255, на плате измерительного модуля размещен барометрический датчик давления BMP280 со встроенным датчиком температуры, который используется для температурной компенсации.
Для передачи данных может использоваться интерфейс I2C. Назначение контактов модуля описано в Таблице 1.
Таблица 1. Назначение контактов платы 10 DOF IMU Sensor [C]
|
Номер контакта |
Символ |
|
|
1 |
VCC |
Напряжение питания 3.3В ~ 5.5В |
|
2 |
GND |
Земля |
|
3 |
SDA |
Вывод данных I2C |
|
4 |
SCL |
Вывод тактирования I2C |
|
5 |
INT |
Цифровой выход сигнала прерывания MPU9255 |
|
6 |
FSYNC |
Сигнал синхронизации кадра MPU9255 |
Рис. 1. Инерциальный измерительный модуль 10 DOF IMU Sensor [C]
1. Инерциальный измерительный модуль 10 DOF IMU Sensor [C]
Рис. 2. Размеры инерциального измерительного модуля 10 DOF IMU Sensor [C]
Рис. 3. Схема принципиальная электрическая инерциального измерительного модуля 10 DOF IMU Sensor [C]
Отличительные особенности:
-
MPU9255: трехосевой гироскоп, трехосевой акселерометр и трехосевой компас/магнитометр:
- встроенный цифровой процессор движения (DMP™), полностью разгружает вычислительные ресурсы внешнего микроконтроллера, синхронизирует работу датчиков, распознает движение и т. д.,
- по сравнению с MPU6050 имеет меньшую мощность потребления и больше подходит для носимых устройств;
-
BMP280: барометрический датчик давления:
- встроенный температурный датчик для температурной компенсации,
- по сравнению с BMP180 имеет меньшее энергопотребление и более высокую производительность;
- Данные с 10 DOF могут быть получены через I2C интерфейс;
-
Акселерометр:
- разрешение: 16 бит,
- диапазон измерений (конфигурируемый): ±2, ±4, ±8, ±16g,
- рабочий ток: 450 uA;
-
Гироскоп:
- разрешение: 16 бит,
- диапазон измерений (конфигурируемый): ±250, ±500, ±1000, ±2000°/сек,
-
рабочий ток: 3.
 2 мA;
2 мA;
-
Компас/ Магнитометр:
- разрешение (конфигурируемое): 14 или 16 бит,
- диапазон измерений: ±4800µT,
- рабочий ток: 280 uA;
-
Барометрический датчик давления:
- барометрическое разрешение: 0.0016hPa,
- температурное разрешение: 0.01°C,
- диапазон измерений: 300 ~ 1100 hPa (высота: +9000 м ~ -500 м),
- относительная точность при измерении давления (700 hPa~900 hPa, 25°C~40°C): ±0.12 hPa (±1м),
- рабочий ток (при скорости обновления 1 Hz, в режиме ультранизкого потребления): 2.8 uA;
- Питание: 3.3 В ~ 5.5 В (внутренний стабилизатор напряжения с малым падением напряжения).
Документацию и программное обеспечение можно найти на сайте производителя.
Анонс составил и подготовил
Шрага Александр,
office@terraelectronica. ru
ru
IMU-сенсор на 10 степеней свободы (Troyka-модуль)
«Где я?» — такой вопрос хотя бы раз задавал себе каждый. Опытный моряк смог бы определить это по звёздам. А вот вашему квадракоптеру или мобильному роботу для верного ответа необходим целый набор измерительных устройств. IMU-сенсор на 10 степеней свободы поможет вашему умному устройству найти себя!
Для решения этой задачи мы расположили на плате 4 микросхемы от STMicroelectronics:
- Трёхосный акселерометр LIS331DLH покажет ускорение относительно собственных осей X, Y и Z. Это поможет определить направление к центру Земли
- Трёхосный гироскоп L3G4200D покажет скорость вращения относительно собственных осей X, Y и Z
- Трёхосный магнетометр/компас LIS3MDL покажет напряженность магнитного поля относительно собственных осей. Это поможет определить направление на Север
- Барометр LPS331AP покажет атмосферное давление и поможет вычислить высоту над уровнем моря.
Каждая микросхема имеет встроенный датчик температуры. Это позволит добиться точной работы датчиков даже в экстремальных условиях.
Общение модуля с управляющей электроникой, такой как Arduino, происходит по протоколу I²C / TWI.
А это значит, что для подключения вам понадобится всего два контакта.
Это позволит добиться точной работы датчиков даже в экстремальных условиях.
Общение модуля с управляющей электроникой, такой как Arduino, происходит по протоколу I²C / TWI.
А это значит, что для подключения вам понадобится всего два контакта.
Мы поместили на модуль регулятор напряжения и специальный I²C-буфер. Поэтому вы смело можете использовать его с управляющей электроникой напряжением 3,3…5 В.
Подключение
Подключение этого Troyka-модуля отличается от стандартного: он имеет два трёхконтактных разъёма. Один разъём используется для подачи напряжения. Другой — для подключения к шине I²C. Два 3-проводных шлейфа для подключения включены в комплект.
При подключении к Arduino будет крайне удобно использовать Troyka Shield.
Возьмите Troyka Slot Shield и избавьтесь от проводов — два комплекта ножек надёжно фиксируют модуль на шилде.
Также модуль физически совместим с breadboard’ом.
Характеристики
| Максимальная чувствительность | Диапазон измерений | ||
|---|---|---|---|
| Акселерометр | 9.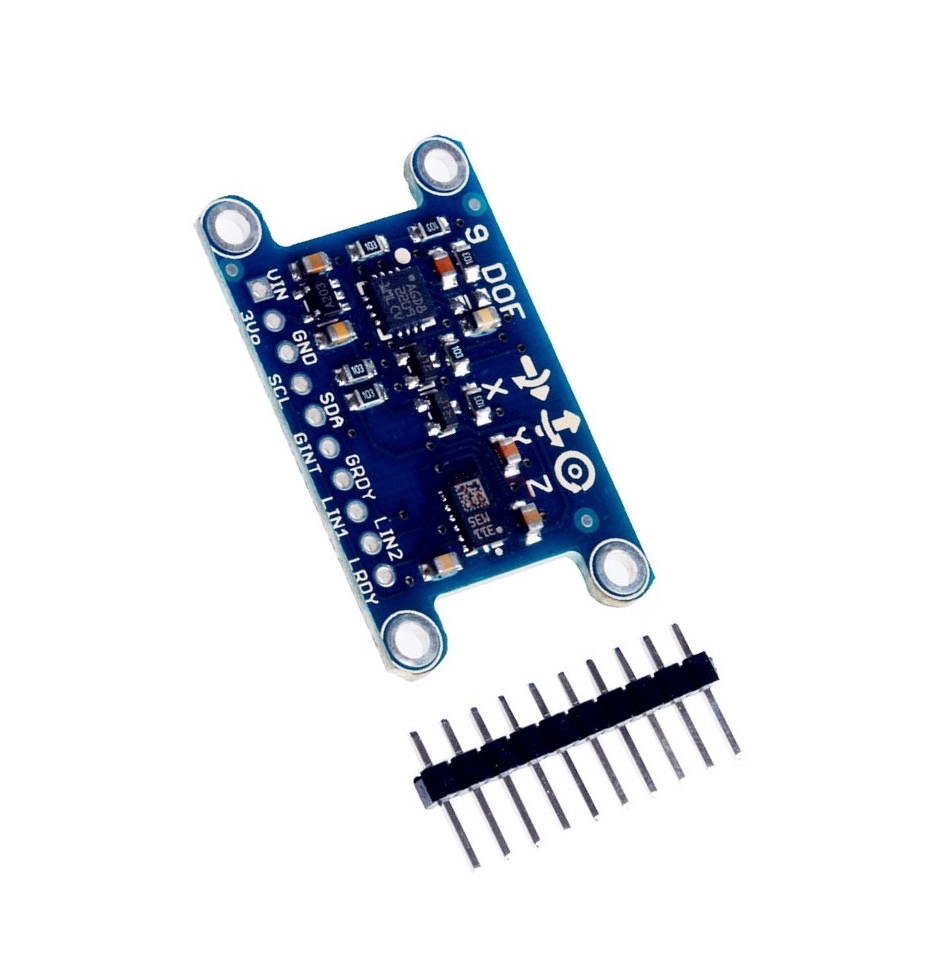 8×10-3 м/с² 8×10-3 м/с² | ±2/ ±4/ ±8 g | |
| Гироскоп | 8.7×10-3 град/сек | ±250/ ±500/ ±2000 град/сек | |
| Магнетометр | 1.46×10-4 Гс | ±4/ ±8/ ±12/ ±16 Гс | |
| Барометр | 2.4×10-4 мбар | 1260 мбар |
- Напряжение питания: 3,3–5 В
- Потребляемый ток: менее 10 мА
- Габариты: 25,4×25,4 мм
Электронный модуль ” IMU (датчик положения)”
1. Назначение устройства
Электронный модуль «Датчик пространственного положения» ПЭМ10.300 (Рис. 1.1) является элементом системы управляющей электроники «Эвольвектор ВЕРТОР» (далее ВЕРТОР) и относится к классу датчиков. Он предназначен для определения угловых ускорений, угловых скоростей и вычисления углов поворота относительно трех декарторвых осей, промаркированных на плате. Также датчик наделен функцией определения индукции магнитного поля земли в точке своего нахождения. Модуль может использоваться в учебных стендах, робототехнических конструкциях и системах их навигации, которые требуют определения указанных параметров.
Также датчик наделен функцией определения индукции магнитного поля земли в точке своего нахождения. Модуль может использоваться в учебных стендах, робототехнических конструкциях и системах их навигации, которые требуют определения указанных параметров.
Модуль рассчитан на применение совместно с программируемыми контроллерами и шилдами, входящими в систему ВЕРТОР (подробная информация о системе представлена на сайте https://academy.evolvector.ru).
Рис. 1.1
2. Конструкция модуля и назначение выводов (контактов)
Модуль «Датчик пространственного положения» выполнен в форме печатной платы, на которой смонтированы разъем для подключения модуля к контроллеру, цифровой датчик пространственного положения и индикатор принципиальной работоспособности модуля (Рис.2.1).
Рис. 2.1
Плата имеет типоразмер U1 (1 unit) и четыре крепежных отверстия под винты М3. Межосевое расстояние крепежных отверстий и физические размеры модуля представлены на рисунке 2.2. По расстоянию между крепежными отверстиями (кратно 8 мм) модуль совместим с конструкторами Эвольвектор, LEGO, MakeBlock и может крепиться к их деталям с помощью стоек.
Межосевое расстояние крепежных отверстий и физические размеры модуля представлены на рисунке 2.2. По расстоянию между крепежными отверстиями (кратно 8 мм) модуль совместим с конструкторами Эвольвектор, LEGO, MakeBlock и может крепиться к их деталям с помощью стоек.
Рис. 2.2
Модуль не является независимым устройством и может работать только совместно с контроллерами системы ВЕРТОР.
Подключение модуля осуществляется с помощью разъема XH-2.54-4P, выводы которого имеют следующее назначение:
VCC – к “+” источника питания контроллера;
SDL – к линии SDL контроллера, по которой передаются тактирующие импульсы для передачи данных по протоколу I2C;
SDA – к линии SDA контроллера, по которой происходит передача данных по протоколу I2C;
GND – земля (общий провод).
Для указанных контактов на печатной плате модуля нанесена соответствующая маркировка белого цвета.
Подробно о устройстве модуля, его функциях и возможностях рассказано на
Академии Эвольвектор – https://academy.evolvector.ru/pem10-300
Датчик IMU на 10 степеней свободы Troyka-модуль
«Где я?» — насущный вопрос, который возникает изо дня в день. Опытный моряк смог бы определить положение по звездам. А вот вашему квадрокоптеру или мобильному роботу нужна целая пачка датчиков для точного ответа на этот вопрос. Поэтому мы объединили их в один инерциальный модуль на 10 степеней свободы, который поможет вашему умному устройству надежно отслеживать свое положение в пространстве!Для решения задачи инерциальной навигации на плате расположены четыре микросхемы от STMicroelectronics. Каждый МЭМС-датчик оснащен температурной компенсацией для точной работы в экстремальных условиях.
Трехосевой акселерометр LIS331DLH показывает ускорение относительно собственных осей X, Y и Z. Это помогает определить направление к центру Земли.
Трехосевой гироскоп I3G4250D показывает скорость вращения относительно собственных осей X, Y и Z.
Трехосевой магнитометр/компас LIS3MDL определяет напряженность магнитного поля относительно собственных осей. Это помогает определить направление на Север.
Барометр LPS25HB измеряет атмосферное давление и помогает вычислить высоту над уровнем моря.
Модуль подключается к управляющим платам через две группы Troyka-контактов. Поскольку данные передаются через интерфейс I²C, то для передачи показаний всех сенсоров хватает всего двух контактов. При этом у каждой микросхемы есть свой индивидуальный адрес — подробности описаны в инструкции к датчику.
Верхняя группа:
—Сигнальный (D) — линия данных шины I²C (SDA).
—Сигнальный © — линия тактирования шины I²C (SCL).
Нижняя группа:
—Питание (V) — питание сенсора (3,3–5 В).
—Земля (G) — общая земля.
На модуль помещен регулятор напряжения и специальный I²C-буфер. Поэтому вы можете смело использовать его с управляющей электроникой напряжением 3,3–5 В.
При подключении к Arduino или Iskra JS удобно использовать Troyka Shield. Полностью избавиться от проводов вам поможет плата расширения Troyka Slot Shield. Контактные ножки модуля также совместимы с breadboard’ом.
Комплектация:
—IMU-сенсор v2: 1 шт.
—Трехпроводной шлейф: 2 шт.
Характеристики:
—МЭМС-датчики: акселерометр, гироскоп, магнитометр, барометр.
—Интерфейс: I²C.
—Напряжение питания: 3,3–5 В.
—Потребляемый ток: до 10 мА.
—Габариты: 25,4×25,4×10,1 мм.
CAN IMU : BaseСam Electronics
CAN IMU в 3D
CAN IMU вид сверху
CAN IMU вид снизу
Загрузки
CAD-чертеж (808Kb 13.07.2016)CAN-версия IMU заменяет I2C IMU для контроллеров SimpleBGC 32-bit Extended и BaseCamBGC Pro.
Особенности
- CAN-шина обеспечивает более стабильное и помехозащищенное соединение по сравнению с I2C, без ограничений по длине кабеля.
 CAN-шина поддерживается в «Extended» и «Pro» версиях контроллеров.
CAN-шина поддерживается в «Extended» и «Pro» версиях контроллеров. - I2C-порт совместим с обычным SBGC32 IMU-кабелем и всеми SBGC32-контроллерами.
- Встроенный EEPROM может хранить данные о калибровке.
- Новый 6-осевой сенсор ICM20608 от InveSense обладает лучшей производительностью в сравнении с прежним MPU-6050.
- Допольнительный I2C- и UART-интерфейсы для внешних устройств (будет реализовано в будущих версиях прошивки).
- Компактный размер. Монтажные отверстия совсестимы со старым SBGC32 IMU. Можно доукомплектовать корпусом.
Для правильной работы CAN IMU необходима прошивка версии 2.61b2 и выше.
Характеристики
| Размеры | 25×25 мм |
| Расстояние между монтажными отверстиями | 14.2 мм |
| Диаметр монтажных отверстий | 3 мм |
Интерфейсы
Прошивка 1.1
CAN IMU Firmware v. 1.1 (21Kb 26.11.2016)
1.1 (21Kb 26.11.2016)
/!\ Мы настоятельно советуем обновиться всем владельцам CAN IMU с прошивкой 1.0 (заказы, отправленные до 22.11.2016)!
- Исправлена критическая ошибка с внезапным вращением всех моторов при старте 1
Как обновить прошивку?
Для обновления прошивки в CAN-модуле, соедините его через CAN-интерфейс с платой, подключите плату к компьютеру и запустите SimpleBGC32 GUI. Лучше не подключать аккумуляторную батарею к контроллеру стабилизации.
- Перейдите на вкладку “Upgrade”, откройте вкладку “Connected modules”. Нажмите кнопку “Refresh” для загрузки информации о модулях.
- Выберите требуемый модуль из списка. GUI выдаст вам информацию об оборудовании, прошивке и загрузчике (кроме старых GUI до версии 2.62: они покажут только версию “железа” и загрузчика).
- Найдите файл прошивки. Будьте осторожны — неправильный файл превратит ваш девайс в маленький “кирпичик” и вернуть его работоспособность будет очень сложно.

- Нажмите кнопку “Flash”, чтобы обновить прошивку.
- Переподключите контроллер, чтобы он мог перезагрузиться и прочесть обновления.
- Подключитесь через GUI и повторите шаги 2, 3 чтобы проверить, что все обновилось и работает нормально.
Информация об обновлении прошивки через интерфейс I2C будет доступна позже.
| Параметр | Технические данные |
|---|---|
| Параметр Цифровое разрешение | Технические данные Акселерометр (A): 16 бит или 0,06 мг / младший бит |
| Параметр Программируемый диапазон измерения и чувствительность | Технические данные (A): ± 2 г: 16384 LSB / г от до (A): ± 16 г: 2048 LSB / г (G): ± 125 дпс: 262.1 LSB / dps от |
| Параметр Смещение нулевого ускорения / нулевой скорости | Технические данные (A): ± 20 мг |
| Параметр Ошибка чувствительности | Технические данные (А): ± 0. |
| Параметр Диапазон температур | Технические данные -40… +85 ° С |
| Параметр Температурный режим | Технические данные (А): ± 0.25 мг / К; ± 0,004% / K |
| Параметр Плотность шума | Технические данные (A): 160 мкг / √Гц |
| Параметр Смещение по сравнению с деформацией печатной платы | Технические данные (А): ± 0.01 мг / мкс |
| Параметр Фильтр BW (программируемый) | Технические данные (A): 5 Гц… 684 Гц |
| Параметр Скорость вывода данных (ODR) | Технические данные (А): 12.5 Гц… 1,6 кГц |
| Параметр Цифровые входы / выходы | Технические данные 2x SPI; 2x I2C; AUX I / F; OIS I / F |
| Параметр Напряжение питания | Технические данные 1. |
| Параметр Потребление тока | Технические данные 685 мкА при полном ODR (без наложения спектров) |
| Параметр Размер посылки | Технические данные 2,5 х 3.0 x 0,8 мм³ |
 4%
4%  7… 3,6 VDD
7… 3,6 VDD | Параметр | Технические данные |
|---|---|
| Параметр Цифровое разрешение | Технические данные Акселерометр (A): 16-битный |
| Параметр разрешение | Технические данные (А): 0.09 мг |
| Параметр Диапазон измерения и чувствительность | Технические данные (A): ± 3 г: 10920 LSB / г ± 6 г: 5460 LSB / г ± 12 г: 2730 LSB / г ± 24 г: 1365 LSB / г (G): |
| Параметр Нулевое смещение (типичное за весь срок службы) | Технические данные (A): ± 20 мг |
| Параметр ТШО | Технические данные (A): ± 0,2 мг / К |
| Параметр Плотность шума (тип.) | Технические данные (A): 175 мкг / √Гц |
| Параметр Пропускная способность (прогр.) | Технические данные 5 Гц… 523 Гц |
| Параметр Возможность выбора скорости передачи данных на выходе | Технические данные 12.5 Гц … 2 кГц |
| Параметр Цифровые входы / выходы | Технические данные SPI, I²C, |
| Параметр Напряжение питания (VDD) | Технические данные 2,4… 3,6 В |
| Параметр Напряжение питания I / 0 (VDDIO) | Технические данные 1. |
| Параметр Диапазон температур | Технические данные -40… + 85 ° С |
| Параметр Потребление тока (полная работа) | Технические данные 5,15 мА |
| Параметр Пакет LGA | Технические данные 3 х 4.5 x 0,95 мм³ |
 384 LSB / ° / с
384 LSB / ° / с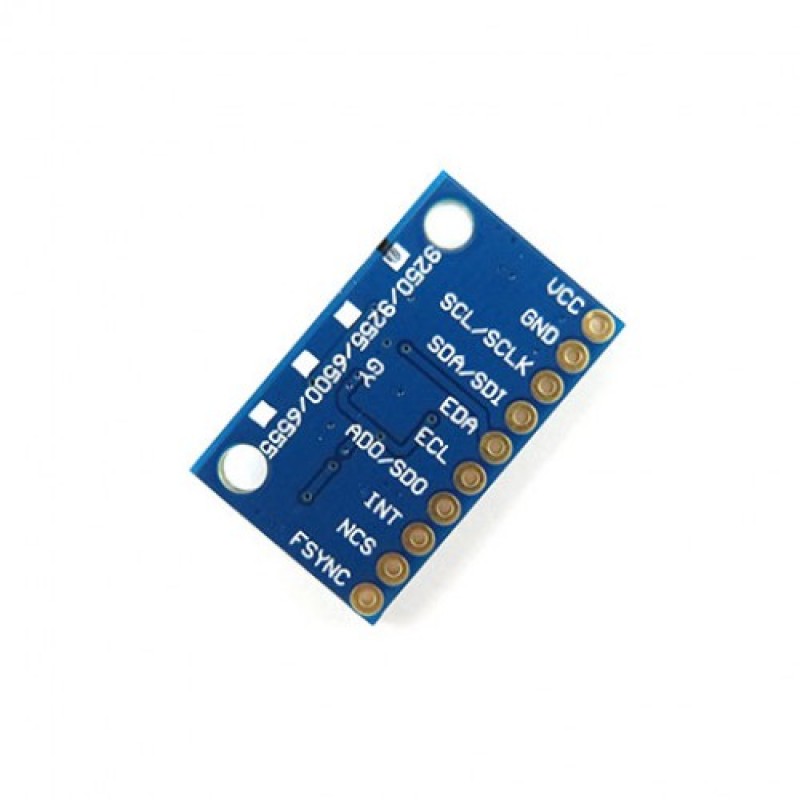 2… 3,6 В
2… 3,6 В| Параметр | Технические данные |
|---|---|
| Параметр Цифровое разрешение | Технические данные Акселерометр (A): 16 бит или 0,06 мг / младший бит |
| Параметр Программируемый диапазон измерения и чувствительность | Технические данные (A): ± 2 г: 16384 LSB / г от до (A): ± 16 г: 2048 LSB / г (G): ± 125 дпс: 262.1 LSB / dps от |
| Параметр Смещение нулевого ускорения / нулевой скорости | Технические данные (A): ± 20 мг |
| Параметр Ошибка чувствительности | Технические данные (А): ± 0. |
| Параметр Диапазон температур | Технические данные -40… +85 ° С |
| Параметр Температурный режим | Технические данные (А): ± 0,25 мг / К; ± 0.004% / K |
| Параметр Плотность шума | Технические данные (A): 160 мкг / √Гц |
| Параметр Смещение по сравнению с деформацией печатной платы | Технические данные (А): ± 0.01 мг / мкс |
| Параметр Фильтр BW (программируемый) | Технические данные (A): 5 Гц… 684 Гц |
| Параметр Скорость вывода данных (ODR) | Технические данные (А): 12.5 Гц… 1,6 кГц |
| Параметр Цифровые входы / выходы | Технические данные 1x MIPI I3CSM |
| Параметр Напряжение питания | Технические данные 1. |
| Параметр Потребление тока | Технические данные ~ 700 мкА при полном ODR (без наложения спектров) |
| Параметр Размер посылки | Технические данные 2,5 х 3.0 x 0,8 мм³ |
 4%
4%  7… 3,6 VDD
7… 3,6 VDD Руководство по покупке акселерометра, гироскопа и IMU
Акселерометры и гироскопыстановятся все более популярными в бытовой электронике, так что, может быть, вам пора добавить их в свой проект! Прокрутка категории датчиков SparkFun показывает огромный список этих датчиков, которые могли бы идеально подойти для вашего следующего проекта, если бы вы знали, что они делают, и какой из них лучше всего подходит для вашего проекта. Цель этого руководства по покупке – научить вас говорить на том же языке, что и спецификации этих датчиков, и помочь вам выбрать тот, который лучше всего подходит для ваших нужд.
Акселерометры
Что такое акселерометр? Ну разгон. Вы знаете … как быстро что-то ускоряется или замедляется. Вы увидите ускорение, отображаемое либо в метрах в секунду в квадрате (м / с 2 ), либо в перегрузке (g), что составляет около 9,8 м / с 2 (точное значение зависит от высоты и масса планеты, на которой вы находитесь).
Вы знаете … как быстро что-то ускоряется или замедляется. Вы увидите ускорение, отображаемое либо в метрах в секунду в квадрате (м / с 2 ), либо в перегрузке (g), что составляет около 9,8 м / с 2 (точное значение зависит от высоты и масса планеты, на которой вы находитесь).
используются для определения как статического (например, силы тяжести), так и динамического (например, внезапных пусков / остановок) ускорения.Одним из наиболее широко используемых приложений для акселерометров является определение наклона. Поскольку на них влияет ускорение свободного падения, акселерометр может сказать вам, как он ориентирован относительно поверхности Земли. Например, в iPhone от Apple есть акселерометр, который позволяет узнать, находится ли он в портретном или ландшафтном режиме. Акселерометр также можно использовать для определения движения. Например, акселерометр в WiiMote от Nintendo можно использовать для определения имитированных ударов правой и левой руки теннисной ракетки или катания шара для боулинга.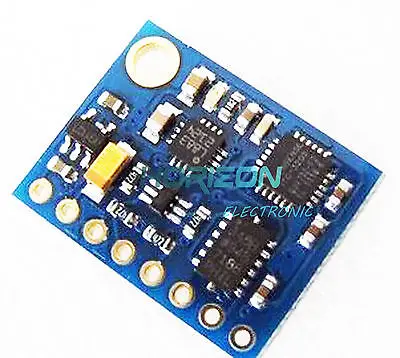 Наконец, акселерометр также можно использовать для определения того, находится ли устройство в состоянии свободного падения. Эта функция реализована на нескольких жестких дисках: при обнаружении падения жесткий диск быстро отключается для защиты от потери данных.
Наконец, акселерометр также можно использовать для определения того, находится ли устройство в состоянии свободного падения. Эта функция реализована на нескольких жестких дисках: при обнаружении падения жесткий диск быстро отключается для защиты от потери данных.
Теперь, когда вы знаете, что они делают, давайте рассмотрим, какие характеристики вам следует учитывать при выборе акселерометра:
- Диапазон – Верхний и нижний пределы того, что может измерять акселерометр, также известен как его диапазон.В большинстве случаев меньший диапазон полной шкалы означает более чувствительный выход; так вы можете получить более точные показания акселерометра с низким диапазоном полной шкалы.
Вы хотите выбрать диапазон чувствительности, который лучше всего подходит для вашего проекта, если ваш проект будет подвергаться только ускорениям от +2g до -2g, акселерометр с диапазоном ± 250g не даст вам большой точности, если таковая будет.
У нас есть хороший ассортимент акселерометров с максимальным диапазоном от ± 1 г до ± 250 г. Большинство наших акселерометров настроены на жесткий максимальный / минимальный диапазон, однако некоторые из более модных акселерометров имеют выбираемые диапазоны.
Большинство наших акселерометров настроены на жесткий максимальный / минимальный диапазон, однако некоторые из более модных акселерометров имеют выбираемые диапазоны. - Интерфейс – это еще одна из наиболее важных спецификаций. Акселерометры будут иметь аналоговый интерфейс с широтно-импульсной модуляцией (ШИМ) или цифровой интерфейс.
- Акселерометры с аналоговым выходом вырабатывают напряжение, прямо пропорциональное измеренному ускорению. При 0g аналоговый выход обычно находится примерно в середине подаваемого напряжения (например, 1,65 В для датчика 3,3 В). Как правило, с этим интерфейсом проще всего работать, поскольку аналого-цифровые преобразователи (АЦП) реализованы в большинстве микроконтроллеров. Акселерометры
- с интерфейсом PWM будут генерировать прямоугольную волну с фиксированной частотой, но рабочий цикл импульса будет изменяться в зависимости от воспринимаемого ускорения. Это довольно редко; в нашем каталоге только один. Цифровые акселерометры
- обычно имеют последовательный интерфейс, будь то SPI или I²C.
 В зависимости от вашего опыта, их может быть труднее всего интегрировать с вашим микроконтроллером. Тем не менее, цифровые акселерометры популярны, потому что они обычно имеют больше функций и менее восприимчивы к шуму, чем их аналоговые аналоги.
В зависимости от вашего опыта, их может быть труднее всего интегрировать с вашим микроконтроллером. Тем не менее, цифровые акселерометры популярны, потому что они обычно имеют больше функций и менее восприимчивы к шуму, чем их аналоговые аналоги.
- Количество измеренных осей – Это очень просто: сколько из трех возможных осей (x, y и z) может определить акселерометр? Обычно лучше всего подходят трехосевые акселерометры; они являются наиболее распространенными и на самом деле не дороже, чем одно- или двухосные акселерометры с такой же чувствительностью.
- Энергопотребление – Если ваш проект работает от батареи, вы можете подумать, сколько энергии будет потреблять акселерометр.Требуемый ток потребления обычно находится в диапазоне 100 мкА. Некоторые датчики также имеют функцию сна для экономии энергии, когда акселерометр не нужен.
- Дополнительные функции – Многие недавно разработанные акселерометры могут иметь несколько изящных функций, помимо простого получения данных об ускорении.
 Эти более новые акселерометры могут включать в себя такие функции, как выбор диапазонов измерения, контроль сна, обнаружение нулевого ускорения и определение касания.
Эти более новые акселерометры могут включать в себя такие функции, как выбор диапазонов измерения, контроль сна, обнаружение нулевого ускорения и определение касания.
Гироскопы
Гироскопы измеряют угловую скорость, то есть насколько быстро что-то вращается вокруг оси.Если вы пытаетесь отслеживать ориентацию движущегося объекта, акселерометр может не дать вам достаточно информации, чтобы точно знать, как он ориентирован. В отличие от акселерометров, на гироскопы не действует сила тяжести, поэтому они отлично дополняют друг друга. Обычно угловая скорость выражается в единицах оборотов в минуту (об / мин) или градусах в секунду (° / с). Три оси вращения обозначаются как x, y и z, или крен, тангаж и рыскание.
В прошлом гироскопы использовались для космической навигации, управления ракетами, подводного наведения и управления полетом.Теперь их начинают использовать вместе с акселерометрами в таких приложениях, как захват движения и навигация по транспортным средствам.
Многое из того, что было учтено при выборе акселерометра, все еще применимо к выбору идеального гироскопа:
- Диапазон – Убедитесь, что максимальная угловая скорость, которую вы ожидаете измерить, не превышает максимальный диапазон гироскопа. Но также, чтобы получить максимально возможную чувствительность, убедитесь, что диапазон вашего гироскопа не намного больше, чем вы ожидаете.
- Интерфейс – На самом деле в этом разделе нет большого разнообразия, 95% гироскопов, которые у нас есть, имеют * аналоговый * выход. Есть несколько, у которых есть цифровой интерфейс – SPI или I 2 C.
- Количество измеренных осей – По сравнению с акселерометрами гироскопы немного отстают от кривой. Лишь недавно на рынке стали появляться недорогие 3-осевые гироскопы. Большинство наших гироскопов одно- или двухосные. При их выборе необходимо обратить внимание на то, какую из трех осей будет измерять гироскоп; например, некоторые двухосные гироскопы будут измерять тангаж и крен, а другие – тангаж и рыскание.

- Power Usage – Если ваш проект работает от батареи, вы можете подумать, сколько энергии будет потреблять гироскоп. Требуемый ток потребления обычно находится в диапазоне 100 мкА. Некоторые датчики также имеют функцию сна для экономии энергии, когда гироскоп не нужен.
- Бонусные функции – Немногое в этом разделе вас поразит. Многие гироскопы имеют температурный выход, что очень полезно при компенсации дрейфа.
Двухосный гироскоп – IDG1215
В наличии COM-09071IDG-1215 – это встроенный двухосевой датчик угловой скорости (гироскоп).Он использует запатентованную технологию MEMS от InvenSense…
IMU
Гироскопы и акселерометры великолепны, но сами по себе они не дают вам достаточно информации, чтобы можно было удобно рассчитывать такие вещи, как ориентация, положение и скорость. Для измерения этих и других переменных многие люди комбинируют два датчика, чтобы создать инерциальный измерительный блок (IMU), который обеспечивает от двух до шести степеней свободы (DOF). IMU широко используются в устройствах, требующих знания их точного положения, например, в роботизированных манипуляторах, управляемых ракетах и инструментах, используемых для изучения движения тела.
Для измерения этих и других переменных многие люди комбинируют два датчика, чтобы создать инерциальный измерительный блок (IMU), который обеспечивает от двух до шести степеней свободы (DOF). IMU широко используются в устройствах, требующих знания их точного положения, например, в роботизированных манипуляторах, управляемых ракетах и инструментах, используемых для изучения движения тела.
SparkFun действительно можно разделить на два класса: простые комбинированные платы IMU, которые просто устанавливают акселерометр и гироскоп на одну печатную плату, и более сложные блоки, которые связывают микроконтроллер с датчиками для получения последовательного вывода. Если вы просмотрели предыдущие разделы, вы должны знать, какие спецификации нужно искать в IMU: количество осей (как для акселерометра, так и для гироскопа), диапазон измерения датчиков и интерфейс.
Глоссарий терминов
Диапазон: Диапазон значений, которые может измерять устройство, является важным фактором при выборе подходящего для вашего проекта. Очевидно, что акселерометр 24g не принесет вам много пользы для отслеживания движений тела, если вы не планируете быть брошенным в космос самой большой рогаткой в мире. Точно так же, если ваш акселерометр достигает максимума в 1g, вы не получите много полезных данных, скажем, о запуске ракеты. Диапазон акселерометра измеряется в g-силе или кратном ускорении свободного падения на Земле. Диапазон гироскопа, который измеряет ускорение вращения, указан в градусах вращения в секунду.
Очевидно, что акселерометр 24g не принесет вам много пользы для отслеживания движений тела, если вы не планируете быть брошенным в космос самой большой рогаткой в мире. Точно так же, если ваш акселерометр достигает максимума в 1g, вы не получите много полезных данных, скажем, о запуске ракеты. Диапазон акселерометра измеряется в g-силе или кратном ускорении свободного падения на Земле. Диапазон гироскопа, который измеряет ускорение вращения, указан в градусах вращения в секунду.
Интерфейс: Метод, с помощью которого вы отправляете и получаете данные между контроллером и устройством, называется интерфейсом.Доступно несколько стандартов, у каждого из которых есть свои преимущества и недостатки. Аналоговые сигналы легко читаются и могут быть измерены большинством микроконтроллеров с очень небольшим кодом. Последовательная связь в этом случае относится к UART и требует немного больше накладных расходов на обработку, но способна передавать больше информации, чем аналоговые сигналы. Последовательный порт или I2C распространены в ситуациях, когда необходимо считывать данные с нескольких осей в контроллер. I2C – это двухпроводной последовательный интерфейс, который позволяет нескольким устройствам совместно использовать шину и взаимодействовать друг с другом, это также очень распространенная возможность среди микроконтроллеров.
Последовательный порт или I2C распространены в ситуациях, когда необходимо считывать данные с нескольких осей в контроллер. I2C – это двухпроводной последовательный интерфейс, который позволяет нескольким устройствам совместно использовать шину и взаимодействовать друг с другом, это также очень распространенная возможность среди микроконтроллеров.
Оси: Это относится к количеству направлений, в которых можно измерить ускорение. Акселерометры измеряют ускорение вдоль указанных осей, тогда как гироскопы измеряют ускорение вокруг осей.
Требования к питанию: Это количество энергии, которое устройство обычно потребляет во время работы, ваша система должна быть способна обеспечивать, по крайней мере, этот большой ток, а затем и некоторый, чтобы избежать неустойчивого поведения или условий отключения.Многие устройства также имеют режимы пониженного энергопотребления или энергосбережения, в которых они потребляют значительно меньше энергии.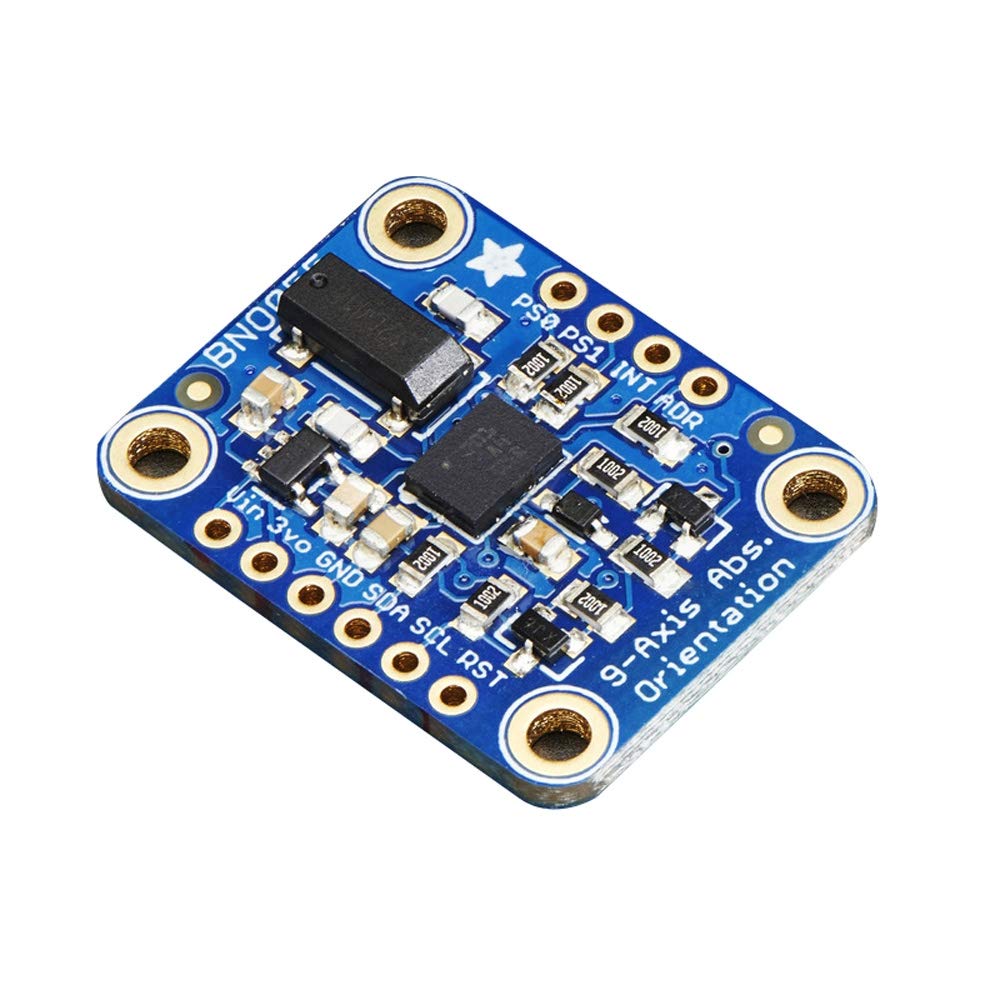 Мы также указали номинальное напряжение устройства для вашего удобства.
Мы также указали номинальное напряжение устройства для вашего удобства.
Бонусные функции: У каждого производителя устройства есть свои представления о том, какие «навороты» следует добавить к гироскопу или акселерометру. В этом столбце мы перечисляем те дополнительные функции, которые отличают каждое устройство от остальных.
Что такое датчик IMU и как использовать с Arduino?
IMU, что означает инерциальный измерительный блок, определяется как 9-осевой датчик, который измеряет ориентацию, скорость и гравитационные силы путем объединения акселерометра, гироскопа и магнитометра в один.IMU обычно поставляются в больших упаковках, но с недавними разработками, такими как технология MEMS, теперь они чаще рассматриваются как миниатюрные датчики, разработанные для легкой интеграции с Arduino или другими микроконтроллерами.
Таким образом, я представлю список датчиков IMU, доступных в Seeed, и то, как вы можете использовать их с Arduino. Но перед этим давайте разберемся с ИДУ подробнее!
Но перед этим давайте разберемся с ИДУ подробнее!
- Если вы ищете руководство по покупке датчика акселерометра и гироскопа, прочтите мой предыдущий пост здесь!
Во введении мы установили, что ИДУ измеряют ориентацию, скорость и гравитационные силы, но как это работает?
IMUработают, обнаруживая вращательное движение трех осей, обычно известное как тангаж, крен и рыскание.Чтобы достичь этого, он полагается на функции акселерометров, гироскопов и магнитометров.
Акселерометры- Акселерометры служат инструментом для измерения скорости на IMU, поскольку мы знаем, что их функциональность заключается в обнаружении скорости изменения скорости объекта
- Может измерять только тангаж и крен, нет информации о рысканье
- Гироскопы служат инструментом для измерения вращения / скорости вращения на IMU, поскольку мы знаем, что его функциональность заключается в обнаружении вращательных изменений или поддержании ориентации
- Магнитометр служит инструментом для измерения силы тяжести на IMU
- По сравнению с акселерометром, который не может измерять рыскание, поскольку он работает с постоянной силой тяжести, магнитометр является отличным дополнением для датчиков акселерометра
Сочетание этих трех датчиков дает ua 9dof IMU, который измеряет ориентацию, скорость и силу тяжести. Распространенной моделью таких датчиков является InvenSense MPU-9250!
Распространенной моделью таких датчиков является InvenSense MPU-9250!
чаще всего используются в инерциальных навигационных системах для управления самолетами, кораблями, подводными лодками и другими беспилотными летательными аппаратами. Тем не менее, благодаря широким возможностям измерения, IMU по-прежнему применимы для других целей, как показано ниже:
- Бытовая электроника; Смартфоны, планшеты, фитнес-трекеры для определения движения и ориентации
- Системы GPS и спутникового позиционирования
- Спортивные технологии и тренировочные приложения
- Персональные транспортные устройства, такие как Segway, для стабилизации / балансировки транспортного средства
Выше приведен общий список приложений IMU но пока требуется обнаружение движения, можно использовать IMU.
Недостатки IMU Несмотря на то, что IMU выбираются для многих приложений, это все же не безошибочный вариант для нужд обнаружения движения. Накопленная ошибка, также известная как «дрейф», является основным недостатком IMU, поскольку он постоянно измеряет изменения и округляет расчетные значения. Когда такой процесс происходит в течение длительного периода времени, он может привести к серьезным ошибкам.
Накопленная ошибка, также известная как «дрейф», является основным недостатком IMU, поскольку он постоянно измеряет изменения и округляет расчетные значения. Когда такой процесс происходит в течение длительного периода времени, он может привести к серьезным ошибкам.
Не имея возможности повысить точность IMU, кроме использования более совершенных инерционных датчиков, мы собрались, чтобы порекомендовать несколько вариантов датчиков IMU, на которые стоит обратить внимание!
Рекомендуемые датчики IMU в SeeedКомпания Seeed предлагает вам на выбор несколько датчиков IMU, от 9DoF до 10Dof.Все применимо для использования микроконтроллера и совместимо с Grove!
Grove Совместимо? СистемаGrove является собственной инициативой Seeed, в основном направленной на то, чтобы помочь таким же пользователям, как вы, легко использовать различные модули, датчики и многое другое с помощью нашей системы plug and play!
- В настоящее время у нас уже имеется более 200 модулей Grove, включая другие типы датчиков, которые вы можете выбрать!
По сравнению с другими предлагаемыми коммутационными платами IMU 9DOF, наша не требует макетной платы, перемычек и сборки схемы для сопряжения с Arduino!
Не представляете, как легко создать пары с Grove? Ниже показан общий датчик IMU по сравнению с одним из наших датчиков Grove – IMU 9DOF Sensor:
- Типичная установка IMU 9DOF
- Установка Grove IMU
Нравится, насколько это просто и менее беспорядочно?
Все, что вам нужно, это Grove Base Shield вместе с Arduino, и вперед!
- Мы поговорим подробнее о руководстве по сопряжению датчиков IMU позже.

Теперь перейдем к нашим рекомендациям!
MPU-9250 вариант: Grove – IMU 9DOF v2.0Начиная список датчиков IMU здесь, в Seeed, это модуль датчика IMU 9DOF! Это недорогой модуль с низким энергопотреблением, обеспечивающий высокую производительность!
Оснащенный 3-осевым гироскопом, 3-осевым акселерометром и 3-осевым магнитометром, это 9-осевой модуль отслеживания движения на основе MPU-9250.
Его функции включают в себя:
- Сверхнизкое энергопотребление, низкое напряжение
- Широкий диапазон обнаружения Механизм внутренней цифровой обработки движения (DMP ™)
- поддерживает расширенные функции обработки движения и функции низкого энергопотребления, такие как распознавание жестов с использованием программируемых прерываний
- Функция самотестирования
- Цифровой- 3-осевые датчики угловой скорости с выходом (гироскопы) с программируемым пользователем диапазоном полной шкалы ± 250, ± 500, ± 1000 и ± 2000 ° / с
- Трехосевой акселерометр с цифровым выходом и программируемой полной шкалой диапазон ± 2 г, ± 4 г, ± 8 г и ± 16 г
- Трехосевой акселерометр с цифровым выходом и полным диапазоном измерения ± 4800 мкТл
Интересно узнать больше о Grove – IMU 9DOF v2. 0? Вы можете перейти на страницу нашего продукта здесь!
0? Вы можете перейти на страницу нашего продукта здесь!
Требуется существенное обновление по сравнению с предыдущей рекомендацией? Grove – IMU 10DOF v2.0 предоставляет вам в общей сложности 10 осей данных, больше приложений, лучшую производительность!
Основанный на недавно выпущенном BMP280, этот сенсорный модуль IMU всего на 65% меньше, чем BMP180, но потребляет намного меньше энергии; только [электронная почта защищена]!
- Для получения дополнительной информации о MPU-9250 и BMP280 обратитесь к соответствующим прилагаемым таблицам данных.
Его функции включают:
- Датчики угловой скорости осей X, Y и Z с цифровым выходом (гироскопы) с программируемым пользователем диапазоном полной шкалы ± 250, ± 500, ± 1000 и ± 2000 ° / с
- Цифровые- выходной 3-осевой акселерометр с программируемым диапазоном полной шкалы ± 2g, ± 4g, ± 8g и ± 16g
- Магнитометр с цифровым выходом и полным диапазоном шкалы ± 4800uT
- Измерение температуры с ± 1.
 Точность 0 ° C
Точность 0 ° C - Диапазон измерения атмосферного давления 300 – 1100 гПа с точностью ± 1,0 гПа
Хотите узнать больше о Grove – IMU 10DOF v2.0 ? Вы можете перейти на страницу нашего продукта здесь!
Как использовать датчик IMU с Arduino?Мы порекомендовали вам наши сенсорные модули IMU, но задаетесь вопросом, как их можно использовать с Arduino? Вот простое руководство, которое поможет вам начать работу. Мы будем использовать Grove – IMU 10DOF v2.0 как наш датчик IMU!
Вот что вам нужно:- Seeeduino – это собственная плата для Arduino от Seeed, построенная с относительными преимуществами по сравнению с исходной
- . Если вы не хотите покупать Seeeduino, это руководство по-прежнему применимо для следующих плат Arduino: Arduino UNO, Arduino Mega, Arduino Leonardo, Arduino 101, Arduino Due
- Шаг 1.
 Подключите Grove – IMU 10DOF v2.0 к порту I2C Grove – Base Shield
Подключите Grove – IMU 10DOF v2.0 к порту I2C Grove – Base Shield - Шаг 2: Подключите Grove – Base Shield к Seeeduino
- Шаг 3: Подключите Seeeduino к ПК через USB-кабель
- Шаг 4: Загрузите код. Обратите внимание, что мы должны выбрать правильный тип платы и COM-порт. Где мы видим:
Это все на сегодняшний день руководства по датчикам и модулям IMU для использования Arduino.Я надеюсь, что благодаря этому вы лучше поймете, что такое датчик IMU, как он работает и какие модули доступны для использования Arduino!
Начните создавать свой собственный проект по датчику движения с нашим списком сенсорных модулей IMU уже сегодня!
Следите за нами и ставьте лайки:
Теги: 9DOF, 9dof IMU, акселерометр, GROVE, гироскоп, IMU, приложения imu, imu arduino, датчик imu, датчик imu arduino, модуль датчика imu, imu использует, принцип работы imu, магнитометр, mpu9250Продолжить чтение
Инерциальные измерительные устройства (IMU) | Analog Devices
Некоторые файлы cookie необходимы для безопасного входа в систему, но другие необязательны для функциональной деятельности. Сбор наших данных используется для улучшения наших продуктов и услуг. Мы рекомендуем вам принять наши файлы cookie, чтобы обеспечить максимальную производительность и функциональность нашего сайта. Для получения дополнительной информации вы можете просмотреть сведения о файлах cookie. Узнайте больше о нашей политике конфиденциальности.
Сбор наших данных используется для улучшения наших продуктов и услуг. Мы рекомендуем вам принять наши файлы cookie, чтобы обеспечить максимальную производительность и функциональность нашего сайта. Для получения дополнительной информации вы можете просмотреть сведения о файлах cookie. Узнайте больше о нашей политике конфиденциальности.
Файлы cookie, которые мы используем, можно разделить на следующие категории:
- Строго необходимые файлы cookie:
- Это файлы cookie, которые необходимы для работы аналога.com или предлагаемые конкретные функции. Они либо служат единственной цели передачи данных по сети, либо строго необходимы для предоставления онлайн-услуг, явно запрошенных вами.
- Аналитические / рабочие файлы cookie:
- Эти файлы cookie позволяют нам выполнять веб-аналитику или другие формы измерения аудитории, такие как распознавание и подсчет количества посетителей и наблюдение за тем, как посетители перемещаются по нашему веб-сайту.
 Это помогает нам улучшить работу веб-сайта, например, за счет того, что пользователи легко находят то, что ищут.
Это помогает нам улучшить работу веб-сайта, например, за счет того, что пользователи легко находят то, что ищут. - Функциональные файлы cookie:
- Эти файлы cookie используются для распознавания вас, когда вы возвращаетесь на наш веб-сайт. Это позволяет нам персонализировать наш контент для вас, приветствовать вас по имени и запоминать ваши предпочтения (например, ваш выбор языка или региона). Потеря информации в этих файлах cookie может сделать наши службы менее функциональными, но не помешает работе веб-сайта.
- Целевые / профилирующие файлы cookie:
- Эти файлы cookie записывают ваше посещение нашего веб-сайта и / или использование вами услуг, страницы, которые вы посетили, и ссылки, по которым вы переходили.Мы будем использовать эту информацию, чтобы сделать веб-сайт и отображаемую на нем рекламу более соответствующими вашим интересам. Мы также можем передавать эту информацию третьим лицам с этой целью.
Модули инерционных датчиков
Что такое инерционные датчики?
Инерциальный датчик или инерциальный измерительный блок (IMU) – это электронное устройство, которое отслеживает конкретное трехмерное ускорение, угловую скорость или двумерную скорость поворота, а также магнитное поле (движущегося) объекта. Он использует акселерометр, гироскоп и магнитометр для обеспечения калиброванных измерений движения несущего его объекта, такого как дрон или автономное транспортное средство. Технология IMU широко используется в дронах, робототехнике, автопарках, цифровом картографировании, тестовом вождении и полетах, а также в складских помещениях и в других областях. Для таких приложений, как геодезия, где данные должны быть доступны после операции, IMU может быть подключен к внутреннему регистратору данных.
Он использует акселерометр, гироскоп и магнитометр для обеспечения калиброванных измерений движения несущего его объекта, такого как дрон или автономное транспортное средство. Технология IMU широко используется в дронах, робототехнике, автопарках, цифровом картографировании, тестовом вождении и полетах, а также в складских помещениях и в других областях. Для таких приложений, как геодезия, где данные должны быть доступны после операции, IMU может быть подключен к внутреннему регистратору данных.
Подробнее о наших IMU
На более продвинутом уровне добавлена технология слияния датчиков для выполнения расчетов ориентации на основе данных, предоставленных IMU.В зависимости от используемой технологии можно определить либо крен, тангаж и неопределяемый рыскание, либо крен, тангаж и базовый рыскание. В первом случае выходной сигнал рыскания относительно нулевой точки, то есть ориентации рыскания, когда фильтр был инициализирован или когда была отправлена последняя команда сброса курса.