
Измеритель ёмкости аккумуляторов на Arduino
Сегодня в эксплуатации находится большое число аккумуляторов и аккумуляторных батарей. Все мобильные устройства, в первую очередь, мобильные телефоны, смартфоны, планшеты, проигрыватели, как правило, питаются от аккумуляторов. Кроме того, аккумуляторные батареи установлены в блоках бесперебойного питания, ноутбуках и нетбуках. Нередко эти источники питания выходят из строя – уменьшается их ёмкость, увеличивается внутреннее сопротивление. Предлагаемое устройство, собранное на основе микроконтроллерной платы Arduino Uno, позволяет провести диагностику аккумуляторов и аккумуляторных батарей – измерить их ёмкость и внутреннее сопротивление.
Это устройство предназначено для измерения электрической ёмкости аккумуляторов и аккумуляторных батарей (далее – аккумуляторов) напряжением от 1 до 15 В и ёмкостью до 20…30 А·ч. Стабильный ток разрядки можно установить переменными резисторами в интервале 0…3 А, напряжение отключения – 0…15 В. Применён двухстрочный шестнадцатисимвольный ЖКИ, на который выводится информация о четырёх параметрах аккумулятора: текущем напряжении, напряжении отключения (пороговом), разрядном токе и ёмкости. Причём ёмкость измеряется постоянно, и в любой момент можно посмотреть её текущее значение. Когда напряжение аккумулятора станет меньше порогового, разрядка останавливается, раздаётся звуковой сигнал, включается светодиод красного свечения, а на ЖКИ будут выведены все указанные выше параметры. Кроме того, если в процессе разрядки нажать на кнопку, на ЖКИ дополнительно выводится информация о внутреннем сопротивлении аккумулятора и его напряжении без нагрузки.
Применён двухстрочный шестнадцатисимвольный ЖКИ, на который выводится информация о четырёх параметрах аккумулятора: текущем напряжении, напряжении отключения (пороговом), разрядном токе и ёмкости. Причём ёмкость измеряется постоянно, и в любой момент можно посмотреть её текущее значение. Когда напряжение аккумулятора станет меньше порогового, разрядка останавливается, раздаётся звуковой сигнал, включается светодиод красного свечения, а на ЖКИ будут выведены все указанные выше параметры. Кроме того, если в процессе разрядки нажать на кнопку, на ЖКИ дополнительно выводится информация о внутреннем сопротивлении аккумулятора и его напряжении без нагрузки.
Схема устройства показана на рис. 1. Его основа – плата Arduino Uno, управляющая всеми узлами и выполняющая основные операции. На ОУ DA1.1, полевом транзисторе VT2 и датчике тока – резисторах R9 и R10 собран стабилизатор разрядного тока, значение которого устанавливают переменными резисторами R3 “Грубо” и R4 “Точно”. Это позволило задавать желаемый ток разрядки в широком интервале, кроме того, упростить программу и, в итоге, просто измерять время разрядки. Пороговое напряжение, до которого следует разряжать аккумулятор, устанавливают переменными резисторами R5 “Грубо” и R6 “Точно”. Напряжение аккумулятора, пороговое, а также на датчике тока измеряет Arduino (входы А0, А1 и А2 соответственно). Значения первых двух напряжений выводятся на ЖКИ HG1. Ток разрядки вычисляется как отношение напряжения на датчике тока к его сопротивлению, а ёмкость аккумулятора (С) – как произведение разрядного тока на прошедшее время. Ток и ёмкость также отображаются на экране ЖКИ. Информацию о пороговом напряжении и токе разрядки модуль Arduino не запоминает, а считывает непосредственно с движков переменных резисторов, поэтому после установки их не следует трогать.
Пороговое напряжение, до которого следует разряжать аккумулятор, устанавливают переменными резисторами R5 “Грубо” и R6 “Точно”. Напряжение аккумулятора, пороговое, а также на датчике тока измеряет Arduino (входы А0, А1 и А2 соответственно). Значения первых двух напряжений выводятся на ЖКИ HG1. Ток разрядки вычисляется как отношение напряжения на датчике тока к его сопротивлению, а ёмкость аккумулятора (С) – как произведение разрядного тока на прошедшее время. Ток и ёмкость также отображаются на экране ЖКИ. Информацию о пороговом напряжении и токе разрядки модуль Arduino не запоминает, а считывает непосредственно с движков переменных резисторов, поэтому после установки их не следует трогать.
Рис. 1. Схема устройства
Для повышения точности измерений весь интервал входного напряжения разбит на два, граница между ними – 4,9 В. Интервалы переключаются автоматически с помощью управляемого аттенюатора на элементах R1, R8 и VT1. В первом интервале транзистор VT1 закрыт, и всё напряжение аккумулятора поступает на вход А0. Во втором интервале высокий уровень с выхода А4 открывает транзистор VT1, и на вход А0 поступает примерно втрое меньшее напряжение.
Во втором интервале высокий уровень с выхода А4 открывает транзистор VT1, и на вход А0 поступает примерно втрое меньшее напряжение.
О режиме разрядки сигнализирует светодиод HL2, который включается низким логическим уровнем с выхода 7 платы Arduino. В этом случае транзистор VT3 закрыт, светодиод HL1 обесточен и управляющее напряжение с выхода ОУ DA1.1 беспрепятственно поступает на затвор транзистора VT2. По окончании разрядки на выводе 7 появляется высокий уровень, светодиод HL2 гаснет, а транзистор VT3 открывается. Включается светодиод HL1 (ток через него ограничивает резистор R7), напряжение на затворе транзистора VT2 уменьшается до 1,8.2 В, в результате чего он закрывается и разрядка аккумулятора прекращается. Одновременно это сопровождается троекратным звуковым сигналом. Диоды VD2 и VD3 защищают вход А0 платы Arduino от превышения или неправильной полярности входного напряжения.
Если рассеиваемая на транзисторе VT2 мощность превышает несколько ватт, необходимо с помощью выключателя SA1 включить вентилятор.
Питают устройство от внешнего (лучше стабилизированного) блока питания напряжением 12 В, который подключают к гнезду XS1. Для защиты от неправильной полярности питающего напряжения установлен диод VD1. В некоторых случаях, например, при измерении параметров аккумулятора ёмкостью несколько ампер-часов и напряжением 12 В, устройства можно питать непосредственно от него. Но при этом для корректного измерения ёмкости следует учесть ток, потребляемый самим устройством.
Если нажать на кнопку SB2 “R” во время разрядки, устройство периодически станет кратковременно отключать ток разрядки и измерять напряжение аккумулятора под нагрузкой и без неё. В этом случае на ЖКИ выводится информация о напряжении аккумулятора без нагрузки и о его внутреннем сопротивлении.
После подачи питающего напряжения движки переменных резисторов R3 и R5 устанавливают в нижнее, а R4 и R6 – в верхнее по схеме положение и подключают разряжаемый аккумулятор. Кратковременно нажимают на кнопку SB1 “Сброс/Старт”. В результате происходит перезагрузка Arduino и включается светодиод HL2 “Разрядка” зелёного свечения. В верхнем левом углу ЖКИ появится информация о напряжении аккумулятора – Ub (в вольтах). С этого момента начинается отсчёт времени разрядки, текущая ёмкость С (в А·ч) выводится в правом верхнем углу ЖКИ. Переменными резисторами R5 и R6 устанавливают порог выключения Ut (в вольтах), при достижении которого разрядка прекращается. Этот параметр выводится в левом нижнем углу ЖКИ. Резисторами R3 и R4 устанавливают разрядный ток Ib (в амперах), он индицируется в правом нижнем углу.
В результате происходит перезагрузка Arduino и включается светодиод HL2 “Разрядка” зелёного свечения. В верхнем левом углу ЖКИ появится информация о напряжении аккумулятора – Ub (в вольтах). С этого момента начинается отсчёт времени разрядки, текущая ёмкость С (в А·ч) выводится в правом верхнем углу ЖКИ. Переменными резисторами R5 и R6 устанавливают порог выключения Ut (в вольтах), при достижении которого разрядка прекращается. Этот параметр выводится в левом нижнем углу ЖКИ. Резисторами R3 и R4 устанавливают разрядный ток Ib (в амперах), он индицируется в правом нижнем углу.
Подключая аккумулятор, будьте очень внимательны! Не перепутайте полярность! Дело в том, что транзистор VT2 содержит встроенный защитный диод, подключённый анодом к истоку, катодом – к стоку. Если полярность аккумулятора окажется неправильной, через этот диод и резисторы R9, R10 может протекать большой ток. Его значение зависит от параметров аккумулятора, в первую очередь, от напряжения. В результате некоторые элементы устройства могут выйти из строя.
Большинство деталей размещены на печатной плате из фольгированного с одной стороны стеклотекстолита, которая выполнена в виде платы расширения (shield). Для подключения к модулю Arduino Uno на плате устройства смонтированы штыревые разъёмы (вилки XP2 и XP3). Это позволяет в случае необходимости быстро устанавливать и снимать Arduino Uno, используя её в других проектах. Чертёж платы показан на рис. 2, её размеры соответствуют плате компьютерного блока питания, в корпусе которого и смонтировано устройство. Размещение элементов на плате показано на рис. 3, а внешний вид смонтированной платы – на рис. 4.
Рис. 2. Чертёж платы
Рис. 3. Размещение элементов на плате
Рис.4. Внешний вид смонтированной платы
В устройстве применены постоянные резисторы Р1-4, С2-23 (кроме R9 и R10), переменные – СП4-1, СП3-4 или импортные, подстроечные – импортные или СП3-19. В датчике тока использованы два последовательно соединённых резистора серии RWR (R9 и R10) сопротивлением по 0,24 Ом и допустимой мощностью рассеяния по 5 Вт. Сделано это по двум причинам. Во-первых, они были в наличии, а во-вторых, при токе до 3 А на них будет выделяться мощность не более 4,5 Вт, поэтому разогреваться они станут не очень сильно, что повысит точность измерения. Светодиоды – любые маломощные соответствующих цветов свечения с диаметром корпуса 3 или 5 мм.
Сделано это по двум причинам. Во-первых, они были в наличии, а во-вторых, при токе до 3 А на них будет выделяться мощность не более 4,5 Вт, поэтому разогреваться они станут не очень сильно, что повысит точность измерения. Светодиоды – любые маломощные соответствующих цветов свечения с диаметром корпуса 3 или 5 мм.
Транзистор 2N7002 (установлен на плате со стороны печатных проводников) можно заменить транзистором 2N7000, КП505, BSS88. Правда, в этом случае придётся подкорректировать рисунок печатных проводников. Взамен транзистора КТ315Б подойдёт любой из серий КТ315, КТ312, КТ3102. Разъёмы XP2, XP3 – однорядные вилки PLS-10. Кнопки – любые с самовозвратом, например КМ-2. Можно применить и тактовые кнопки ТС-0409 или аналогичные, закрепив их на панели с помощью клея. Гнездо для подключения источника питания может быть любым.
Как уже сказано выше, устройство собрано в корпусе компьютерного блока питания размерами 150x125x85 мм. Для подключения проверяемого аккумулятора использованы штатные сетевое гнездо и вилка (XP1). Поскольку в корпусе уже установлен вентилятор, он применён для охлаждения теплоотвода, на котором закреплён транзистор VT2. Конструкция теплоотвода должна быть такой, чтобы поток воздуха от вентилятора проходил вдоль его рёбер. Для упрощения прибора было решено включать вентилятор вручную выключателем, установленным на верхней панели, в случае, если рассеиваемая транзистором мощность превышает 5 Вт. Кроме выключателя, на верхней панели устройства размещены все переменные резисторы, светодиоды, жКи и кнопка SB2, а гнездо XS1 и кнопка SB1 – на задней. Для них сделаны отверстия соответствующих форм и размеров. К – HL2 ЖКИ и светодиоды закреплены клеем. Для подключения разряжаемого аккумулятора использован штатный сетевой кабель от блока питания, но укороченный до 0,5 м. Поскольку кабель содержит три провода, два из них соединены параллельно. На концах проводов распаяны зажимы “крокодил”, но можно применить и другие. В боковой стенке корпуса сделано отверстие для подключения USB-кабеля. Поэтому в Arduino Uno можно загружать программу (скетч), не вынимая плату из корпуса.
Поскольку в корпусе уже установлен вентилятор, он применён для охлаждения теплоотвода, на котором закреплён транзистор VT2. Конструкция теплоотвода должна быть такой, чтобы поток воздуха от вентилятора проходил вдоль его рёбер. Для упрощения прибора было решено включать вентилятор вручную выключателем, установленным на верхней панели, в случае, если рассеиваемая транзистором мощность превышает 5 Вт. Кроме выключателя, на верхней панели устройства размещены все переменные резисторы, светодиоды, жКи и кнопка SB2, а гнездо XS1 и кнопка SB1 – на задней. Для них сделаны отверстия соответствующих форм и размеров. К – HL2 ЖКИ и светодиоды закреплены клеем. Для подключения разряжаемого аккумулятора использован штатный сетевой кабель от блока питания, но укороченный до 0,5 м. Поскольку кабель содержит три провода, два из них соединены параллельно. На концах проводов распаяны зажимы “крокодил”, но можно применить и другие. В боковой стенке корпуса сделано отверстие для подключения USB-кабеля. Поэтому в Arduino Uno можно загружать программу (скетч), не вынимая плату из корпуса. Внешний вид устройства показан на рис. 5.
Внешний вид устройства показан на рис. 5.
Рис. 5. Внешний вид устройства
После загрузки скетча и подключения блока питания начинают налаживание устройства совместно с компьютером, на котором установлена интегрированная среда разработки Arduino – Arduino IDE. В первую очередь, подстроечным резистором R13 устанавливают требуемую контрастность изображения ЖКИ. Движки переменных резисторов R5 и R6 устанавливают в нижнее по схеме положение. Образцовым вольтметром измеряют напряжение питания Vcc микроконтроллера на плате Arduino Uno и заносят его в скетч, после чего загружают его в Arduino Uno.
Вход устройства подключают через образцовый амперметр к регулируемому лабораторному блоку питания с выходным напряжением 0…15 В и током до 3…4 А. Устанавливают напряжение около 4 В и переменным резистором R3 устанавливают разрядный ток 0,5…1 А. Сравнивают показания амперметра Ia и ЖКИ Ib. В случае отличий изменяют в скетче численное значение сопротивления датчика тока RI и загружают его в Arduino Uno до получения точного совпадения показаний.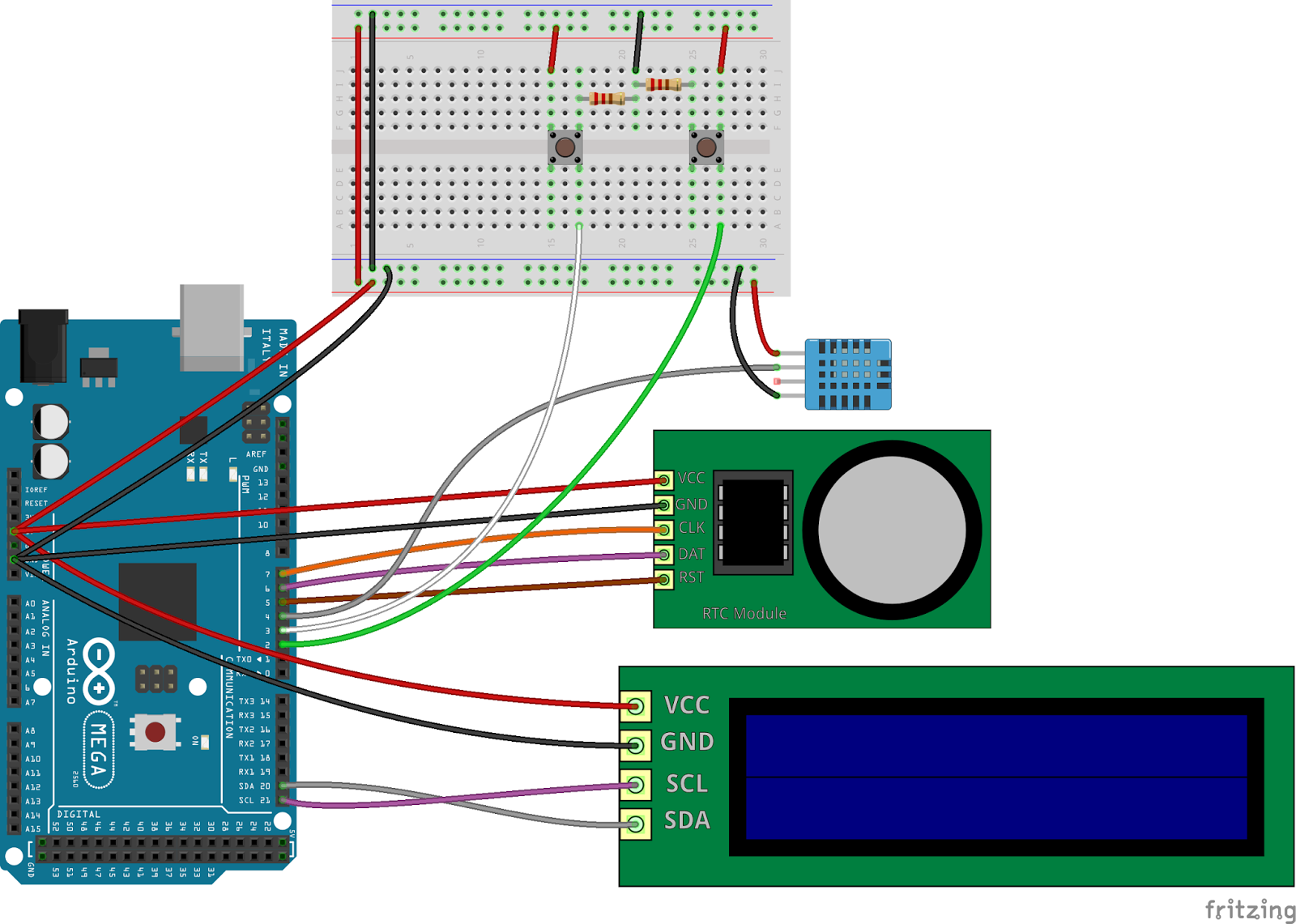
Затем вход устройства напрямую подключают к лабораторному блоку питания. К нему же подключают и образцовый вольтметр. Движки переменных резисторов R3-R6 устанавливают в нижнее по схеме положение. Устанавливают напряжение около 2,5 В и сравнивают показания вольтметра ив и Ub на ЖКИ. Изменением поправочного коэффициента K1 (в скетче), по аналогии с предыдущим случаем, добиваются равенства показаний.
Устанавливают на выходе лабораторного блока питания напряжение около 7 В и нажимают на кнопку SB1 “Сброс/Старт”. После перезагрузки подстроечным резистором R8 приближённо уравнивают показания вольтметра ив и Ub на ЖКИ. Подборкой поправочного коэффициента K2 (в скетче) добиваются более точного равенства показаний.
В заключение определяют сопротивление соединительных проводов. Во время проведения этих работ желательно включить вентилятор. На выходе лабораторного блока питания устанавливают напряжение 8.9 В, при этом показания вольтметра ив и Ub на ЖКИ должны совпадать. Затем резистором R3 устанавливают разрядный ток Ib = 2,5. ..3 А, записывают значения Ib, Uв и Ub на ЖКИ и вычисляют R = (Uв – Ub)/Ib. Это значение заносят в скетч. После такой коррекции при изменении тока разрядки от минимума до максимума показания вольтметра и Ub на ЖКИ должны практически совпадать.
..3 А, записывают значения Ib, Uв и Ub на ЖКИ и вычисляют R = (Uв – Ub)/Ib. Это значение заносят в скетч. После такой коррекции при изменении тока разрядки от минимума до максимума показания вольтметра и Ub на ЖКИ должны практически совпадать.
При нажатии на кнопку SB2 “R” на ЖКИ должны выводиться значения напряжения аккумулятора без нагрузки U0 и его внутреннего сопротивления R. Для проверки этого режима на выходе лабораторного блока питания последовательно с входными проводами устанавливают резистор сопротивлением 0,5…1 Ом и устанавливают ток разрядки 1…2 А. После нажатия на кнопку SB2 на экране ЖКИ должно индицироваться сопротивление этого резистора.
В заключение следует отметить, что для повышения точности измерения тока разрядки Iр, сопротивление резисторов R9 и R10, образующих датчик тока, выбрано сравнительно большим (суммарное сопротивление RI = 0,48 Ом). На этих резисторах падает напряжение Uд = Ip – RI. Например, при токе 3 А Uд = 1,44 В, это означает, что ниже этого напряжения аккумулятор при таком токе разрядить не получится. Но обычно отдельные малогабаритные аккумуляторы таким током и не разряжают, а батарею Ni-Cd, Ni-Mh аккумуляторов или Li-Ion аккумулятор разряжают до большего напряжения.
Но обычно отдельные малогабаритные аккумуляторы таким током и не разряжают, а батарею Ni-Cd, Ni-Mh аккумуляторов или Li-Ion аккумулятор разряжают до большего напряжения.
Но если необходимо уменьшить падение напряжения на датчике тока, в нём следует применить резистор сопротивлением, например, 0,1 Ом. Но в этом случае напряжение на нём уменьшится, а погрешность измерения возрастёт. Для устранения этого недостатка надо усилить (примерно в десять раз) напряжение с датчика тока с помощью УПТ, который можно собрать на неиспользованном ОУ в микросхеме DA1. После этого придётся установить в скетче соответствующее численное значение датчика тока, умноженное на коэффициент усиления УПТ.
В устройстве для Arduino написана самая простая программа с минимальным набором функций. Не изменяя аппаратную часть, можно существенно расширить возможности прибора. Например, повысить точность измерения напряжения, используя способы измерения образцового напряжения и применяя методы статистической обработки результатов. Можно измерять и сравнивать с пороговым не напряжение аккумулятора в процессе разрядки, а его ЭДС, отключая на это время разрядный ток. Можно сделать два режима работы устройства: первый – с мощными батареями напряжением 6…15 В и током разрядки до 5 А, второй – с маломощными батареями и аккумуляторами напряжением до 5 В и разрядным током до 1 А. И наконец, добавив узел зарядки, можно сделать автоматическое зарядно-разрядное устройство с измерением полученного и отданного аккумулятором заряда.
Можно измерять и сравнивать с пороговым не напряжение аккумулятора в процессе разрядки, а его ЭДС, отключая на это время разрядный ток. Можно сделать два режима работы устройства: первый – с мощными батареями напряжением 6…15 В и током разрядки до 5 А, второй – с маломощными батареями и аккумуляторами напряжением до 5 В и разрядным током до 1 А. И наконец, добавив узел зарядки, можно сделать автоматическое зарядно-разрядное устройство с измерением полученного и отданного аккумулятором заряда.
Кроме того, можно предложить ещё немало улучшений параметров устройства без изменения его схемы, а только за счёт коррекции скетча. Но все эти возможности по доработке оставим для поклонников Arduin
Скетч можно найти здесь.
Автор: И. Нечаев, г. Москва
Arduino тестер емкости батареи своими руками » NGIN.pro
Arduino тестер емкости батареи своими рукамиПроект очень простой и основан на законе Ома.
Шаг 2: Схема и принцип работы
Схема:
Конструкция очень проста, который основан на Arduino Nano. OLED-дисплей используется для отображения параметров. Винтовые клеммы используются для подключения аккумуляторной батареи и нагрузки сопротивления. Зуммер используется для подачи сигнала тревоги. Два делители напряжения цепи используются для контроля напряжения на сопротивлении нагрузки. МОП-транзистор для возможности подключать или отключать сопротивление нагрузки с батареей.
 Это позволяет току проходить от положительной клеммы батареи, через резистор, МОП-транзистори затем завершает путь обратно к отрицательному полюсу. Это разряжает батарею в течение периода времени. Arduino измеряет напряжение на нагрузке, а затем разделяет на сопротивление, чтобы выяснить, ток разряда. Умножаем это на время, чтобы получить значение миллиампер-час (мощности).
Это позволяет току проходить от положительной клеммы батареи, через резистор, МОП-транзистори затем завершает путь обратно к отрицательному полюсу. Это разряжает батарею в течение периода времени. Arduino измеряет напряжение на нагрузке, а затем разделяет на сопротивление, чтобы выяснить, ток разряда. Умножаем это на время, чтобы получить значение миллиампер-час (мощности).Шаг 3: Напряжение, ток и емкость измерения
Измерение напряженияМы должны найти напряжение на нагрузке. Напряжения измеряются с использованием двух делителей напряжения цепи. Он состоит из двух резисторов со значениями 10кОм каждый. Он подключен к Arduino аналоговый пин A0 и A1.Измерение тока:Ток (I) = Напряжение (V) – падение напряжения на MOSFET / сопротивления (R)
Делим на 1000, чтобы преобразовать его в миллиамперы.Таким образом, максимальный ток разряда = 4,2 / 10 = 0.42A = 420mAЕмкость измерения:Накапливаемый заряд (Q) = Ток (I) X Время (T).
Шаг 4: Выбор нагрузочного резистора
Выбор нагрузки резистора зависит от величины разрядного тока.
 2 х 8,4 = 2,1 ВтПоддерживая некоторый запас вы можете выбрать 5W. Если вы хотите больше пользы, берите 10Вт.
2 х 8,4 = 2,1 ВтПоддерживая некоторый запас вы можете выбрать 5W. Если вы хотите больше пользы, берите 10Вт.Шаг 5: Выбор МОП-транзистора
Когда сигнал 5В (высокий) подается на затвор полевого МОП-транзистора, что позволяет току проходить от положительной клеммы батареи, через резистор, а МОП-транзистор затем завершает путь обратно к отрицательному полюсу. Это разряжает батарею в течение определенного периода времени. Тоисть МОП-транзистор должен быть выбран таким образом, что он может обрабатывать максимальный разрядный ток без перегрева.Тут использован N-канальный MOSFET-IRLZ44. L показывает, что это логический уровень МОП-транзистор. Усилитель MOSFET логического уровня означает, что он предназначен для включения полностью от логического уровня микроконтроллера. Стандартный МОП-транзистор предназначен для работы от 10V.Если вы используете IRF сери. МОП-транзисторf, то ононе будет полностью включен путем применения 5V от Arduino. Я имею в виду МОП-транзистор не будет нести номинальный ток.

Чтобы отобразить напряжение аккумуляторной батареи, ток разряда и мощность, тут использованл 0,96 “OLED display. Он имеет разрешение 128×64 и использует шину I2C для связи с Arduino. Два контакта SCL (А5), СПУ (А4) в Arduino Uno используются для связи. Используется библиотека U8glib для отображения parameters.First вы должны загрузить библиотеку U8glib .Затем установил его.
Соединения должны быть следующими
OLED”>Arduino -> OLED
Vcc”>5V —-> Vcc
GND”>GND –> GND
SDA”>A4 —-> SDA
SCL”>A5 —-> SCL
Шаг 7: Звуковой сигнал для предупреждения
Для того, чтобы обеспечить различные предупреждения или оповещения, использован пьезоэлектрический зуммер.
Для различных предупреждений:
1. Низкое напряжение батареи
2. Высокое напряжения батареи
3. Отсутствие батареи
Соединения должны быть следующими
Buzzer”>Arduino -> Зуммер
Positive terminal”>D9 -> Положительный полюс
Negative terminal”>GND -> Отрицательный полюс
Шаг 8: Монтаж стоек
После пайки и монтажа, монтировать распорки на 4 угла.
Шаг 9: Программное обеспечение
Программное обеспечение делает следующие задачи
1. Измеряет напряжение
2. Проверяет состояние батареи, чтобы дать сигнал тревоги или начать цикл разряда
3. Отображение параметров на OLED
4. Запись данных на монитор последовательного порта
Код программы Скачать файл: battery_capacity_tester-v1.0.ino.zip [1,76 Kb] (cкачиваний: 1278)
Отказ от ответственности: Пожалуйста, обратите внимание, что вы работаете с литий-ионными аккумуляторами, которые являются взрывоопасными и опасными. Я не могу нести ответственность за любую потерю имущества, повреждения или утраты жизни, если дело дойдет до этого.
Источник
Измеритель ёмкости аккумуляторов (Li-Ion/NiMH/NiCD/Pb) на Arduino – Проекты на Arduino – ARDUINO – Каталог схем
Компьютерная игра — компьютерная программа, служащая для организации игрового процесса (геймплея), связи с партнёрами по игре, или сама выступающая в качестве партнёра.
Компьютерные игры могут создаваться на основе фильмов и книг; есть и обратные случаи. С 2011 года компьютерные игры официально признаны в США отдельным видом искусства.
Компьютерные игры оказали столь существенное влияние на общество, что в информационных технологиях отмечена устойчивая тенденция к геймификации для неигрового прикладного программного обеспечения.
Зарождение
Первые примитивные компьютерные игры были разработаны в 1950-х и 1960-х годах. Они работали на таких платформах, как университетские мейнфреймы и компьютеры EDSAC.
В 1952 году появилась программа «OXO», имитирующая игру «крестики-нолики», созданная А. С. Дугласом как часть его докторскойдиссертации в Кембриджском Университете. Игра работала на большом университетском компьютере, известном как EDSAC(Electronic Delay Storage Automatic Calculator).
В 1958 году Уильям Хигинботам, помогавший строить первую ядерную бомбу в Брукхейвенской национальной лаборатории, для развлечения посетителей создал «Tennis for Two» (с англ.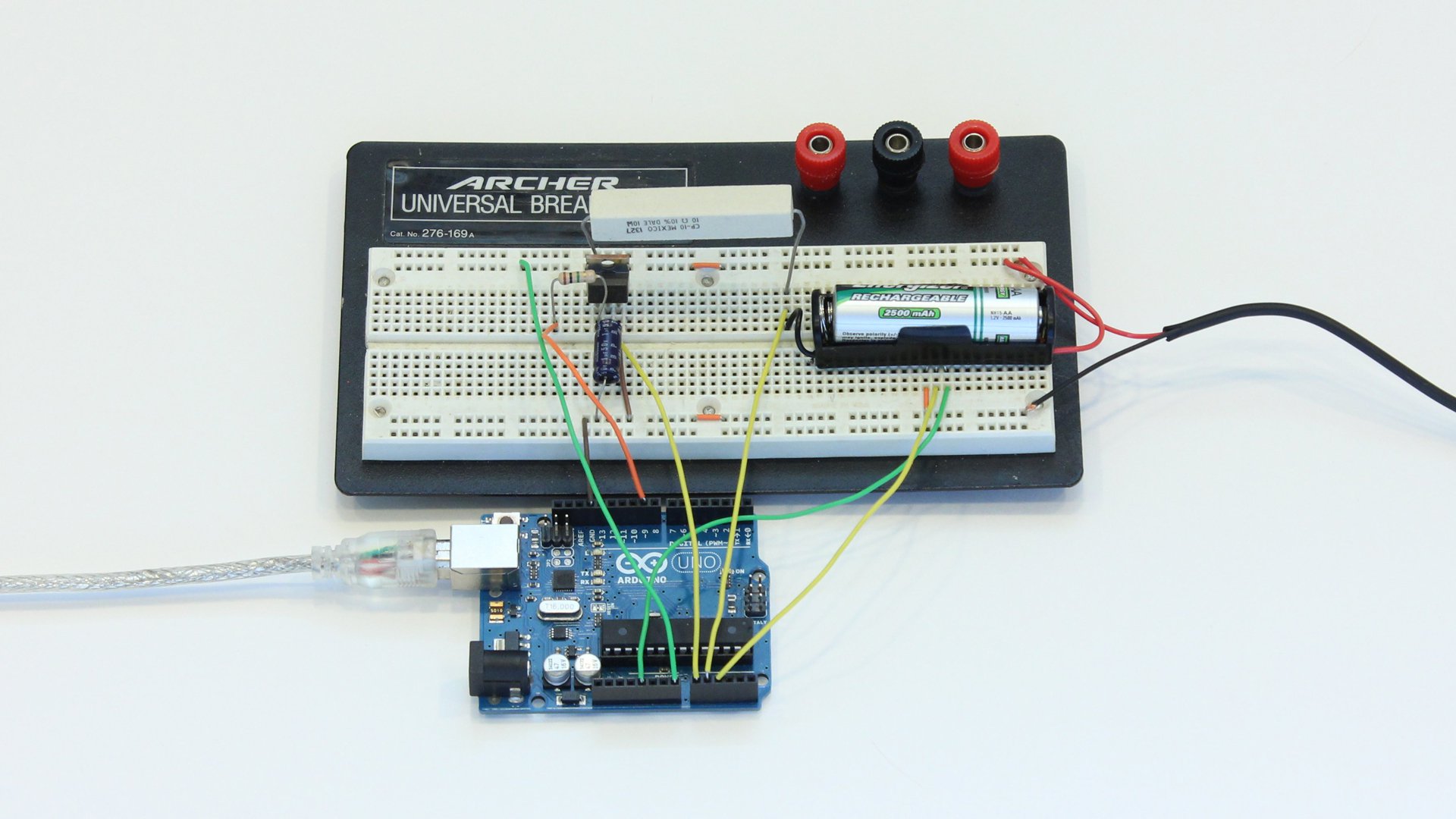 ?— «Теннис для двоих»).
?— «Теннис для двоих»).
В 1962 году Стив Рассел разработал игру «Spacewar!» для миникомпьютера PDP-1 в Массачусетском технологическом институте, которая быстро распространилась по всем университетам США.
В 1967 году Баер создал игру пинг-понг, похожую на «Теннис для двоих». Вместе с Magnavox он работал над созданием первой консоли, названной Magnavox Odysseyв 1972 году.
В 1969 году Ральф Баер, который позже стал известен как «Отец видеоигр», запросил патент на раннюю версию игровой консоли «Television Gaming and Training Apparatus».
Дата размещения: 14.08.16
| Категория: Проекты на Arduino | Добавлен: 25.
 10.2013
| Просмотров: 6070
10.2013
| Просмотров: 6070| Наука и техника | |
| А. ГОЛЫШКО. «Пятое общество» на CeBIT’2017: d!conomy — no limits. | 4 |
| Звукотехника | |
| А. ЛИТАВРИН. Многоканальная усилительная структура в УМЗЧ класса D. | 7 |
| А. БУТОВ. Компактный двухканальный УМЗЧ с импульсным источником питания. | 11 |
| А. СУХОВ. Схемотехника активных кроссоверов. | 14 |
| Радиоприем | |
| В. ГУЛЯЕВ. Новости вещания. | 20 |
| Радиолюбительская технология | |
Е. ГЕРАСИМОВ. Сверлильный станок с полуавтоматическим управлением. ГЕРАСИМОВ. Сверлильный станок с полуавтоматическим управлением. | 21 |
| Радиолюбителю — конструктору | |
| С. ДОЛГАНОВ. Оптронный аналог переменного резистора. | 26 |
| Микропроцессорная техника | |
| А. САВЧЕНКО. Работа с файлами на внешних носителях средствами BASCOM AVR. | 28 |
| Источники питания | |
| И. НЕЧАЕВ. Измеритель ёмкости аккумуляторов на Arduino. | 31 |
| Н. САЛИМОВ. Преобразователь на микроконтроллере для питания измерительных приборов. | 35 |
| Прикладная электроника | |
С. ШИШКИН. Блок реле времени для пяти тепловых пушек. | 36 |
| И. КАРПУНИН. Четырёхцветный светофор с дистанционным управлением по радиоканалу 2,4 ГГц. | 38 |
| Г. НЮХТИЛИН. Упрощённый аквариумный таймер. | 42 |
| Электроника за рулем | |
| А. ШУВАЕВ. Усовершенствование системы зажигания мопедов «Альфа». | 46 |
| Дополнение к напечатанному | |
| Наша консультация. | 48 |
| «Радио» — начинающим | |
| Молодёжная конференция «Радиопоиск 2017». | 49 |
| А. БУТОВ. Доработка электробритвы VT-1378BK. | 51 |
В. МУСИЯКА. Комнатный термометр на Arduino и WS2812B. МУСИЯКА. Комнатный термометр на Arduino и WS2812B. | 52 |
| С. ГЛИБИН. Мегомметр до 200 МОм — приставка к мультиметру. | 54 |
| Д. МАМИЧЕВ. «Танцующий человечек» на Arduino. | 55 |
| «Радио» — о связи | |
| Б. СТЕПАНОВ. Итоги YL-OM CONTEST 2017. | 57 |
| Н. МЯСНИКОВ. КВ-усилитель мощности на IRF520. | 58 |
| Кодекс поведения радиолюбителя. | 62 |
| В. ЩЕРБАКОВ, С. ФИЛИППОВ, Ю. ЗОЛОТОВ. Фазированная решётка для дальних связей на КВ. | 63 |
Измеряем емкость литий-ионных аккумуляторов с помощью Arduino
Недавно я купил на Алиэкспрессе кучку литиевых аккумуляторов для своих будущих проектов, с ёмкостью 1200 мА*ч и 6000 мА*ч.
Теория
Что представляют собой эти миллиампер-часы, указанные на аккумуляторе?
Грубо говоря, ёмкость в 6000 миллиампер-часов означает, что аккумулятор может отдавать ток в 1 ампер на протяжении 6 часов, пока не разрядится до допустимого нижнего предела напряжения. Как их измерить? Нужно подключить аккумулятор к нагрузке и через регулярные промежутки времени измерять силу тока в цепи. Силу тока умножаем на длительность этого промежутка времени, и все эти произведения складываем.
Теперь вопрос – как измерить силу тока в цепи? Ну, тут просто. По закону Ома (I = U/R), если мы знаем сопротивление нагрузки, и падение напряжения на этой нагрузке – то разделив падение напряжения на сопротивление – получим силу тока.
| Принципиальная схема измерения ёмкости и внутреннего сопротивления аккумулятора |
Как измерить это падение напряжения? С помощью Arduino, у которого есть такая чудесная функция, как АЦП – аналого-цифровой преобразователь. Он сравнивает напряжение на входе АЦП с напряжением питания (5В), и выдаёт результат от 0 до 1024. Берём полученное значение, умножаем на 5 Вольт, делим на 1024 – и получаем напряжение. А так как нам нужна разница напряжения между двумя выводами нагрузки – то будем использовать два входа АЦП Arduino. Теперь – как измерить внутреннее сопротивление?
Немного о нагрузке для аккумулятора. Я использовал 6 Ом. В подобных схемах чаще используются резисторы c меньшим сопротивлением – обычно 2-3 Ом. С одной стороны, с таким резистором будет больше сила тока – и, соответственно, для разряда аккумулятора нужно будет меньше времени. Но я заметил, что в этом случае измеряемая ёмкость гораздо меньше, чем при меньшей силе тока. Зато через несколько минут напряжение аккумулятора снова несколько повышается – то есть, при высоких токах разряда химические компоненты просто не успевают полностью вступить в реакцию. Поэтому я решил проводить разряд с малой силой тока, и делать между циклами разряда (по 1 сек.) небольшие паузы (по 0.5 сек.), чтобы электроды могли частично восстановиться. Для того, чтобы включать-выключать ток в цепи, будем использовать полевой транзистор, на базу которого будем подавать управляющий сигнал от 7 цифрового вывода Arduino.
Вывод информации проще всего сделать через LCD экран от Nokia 5110.
Список деталей:
– Arduino. Можно взять любой, желательно с 5 вольтами на выводах. Потому как используемый в качестве ключа полевик – IRFZ44N – при напряжении ниже 4 вольт почти не открывается.
– резисторы для нагрузки. Я использовал 6 штук 1-омных. Но можно взять один резистор от 2 до 10 Ом, рассчитанный на большую мощность. 5 ватт минимум, ведь на этом резисторе будет выделяться в виде тепла вся энергия, запасённая в аккумуляторе.– резисторы 10 кОм – 2 шт.
– резистор 100 кОм – 1 шт. – резистор 100 Ом – 1 шт. – Полевой транзистор. Я взял один из самых распространённых и недорогих – IRFZ44N. – Экранчик от Nokia 5110 – маленький динамик – тактовая кнопка – и, собственно, аккумуляторы для тестирования.Схема и программа:
| Схема тестера ёмкости аккумуляторов на Arduino |
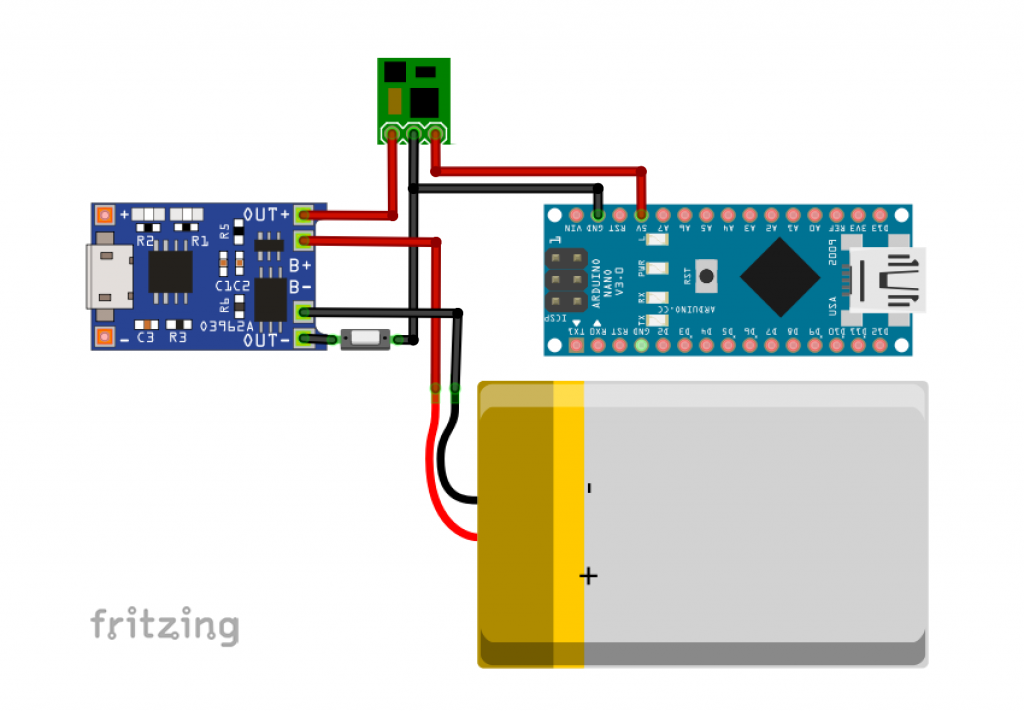
Схему соединения компонентов в этот раз сделал в Fritzing – потому как это устройство вряд ли будет мне нужно очень часто, и его можно собрать на макетке за десять минут – то нет смысла делать его в железе. Ссылка на скачивание внизу.
Программу написал с нуля. Писал без сложных логических конструкций и с комментариями – специально, чтобы начинающие могли во всём разобраться. Из сторонних библиотек понадобится библиотека для работы с LCD Nokia 5110 от Adafruit.
Процесс сборки устройства на макетке полностью заснял на видео, так что кто с ней пока не знаком – может посмотреть:
Результат измерения: аккумулятор UltraFire YF 14500 с заявленной ёмкостью 1200 мА*ч выдал всего 378 мА*ч. А его больший собрат SJ 18650 вместо положенных 6000 смог выдавить из себя 1119 мА*ч.
Справедливости ради стоит отметить один нюанс. Нижний предел напряжения, после которого разряд аккумулятора прекращается, я выставил в 3.5 В. Честно говоря, не стал рисковать – некоторые пишут, что дешёвые аккумуляторы опасно разряжать ниже этого напряжения. Хотя другие разряжают и до 3 В. Но это в планах. Также планирую измерить ёмкость имеющихся купленных давно на рынке никелевых аккумуляторов.
Скачать программу для Arduino и схему можно здесь.
Засим изволю откланяться. Вопросы и замечания не стесняйтесь писать в комментариях!
Простой тестер емкости аккумулятора Arduino
На самом деле это работа, производная от той, которую я нашел в Интернете. Просто нужно было убрать это с дороги. Оригинальный проект можно найти по адресу: http://lazyelectronics.com/index.php/en/item/3-battester-en
ОбзорЯ долгое время избегал использования литий-ионных аккумуляторов. , из-за стоимости и необходимых специальных профилей зарядки. Теперь, когда технология стала более зрелой, я решаюсь на их использование.
Поскольку мой запас ячеек будет в основном использоваться из различных потоков рециркуляции, мне нужно было придумать инструменты для тестирования каждой ячейки.Имея это в виду, вот моя производная от этого тестера.
Что я сделалОсновные изменения, которые я сделал, – это ЖК-дисплей 20×4, а не покупка Nokia 5110, которую использовал первоначальный автор. Я также использовал интерфейсную плату I2C / TWI / SPI для ЖК-экрана.
Обратите внимание, что контакты SCL и SDA НЕ сломаны на pro mini, они есть на контактах A5 и A4, как указано на рисунке.
Можно использовать любой полевой МОП-транзистор, обеспечивающий постоянный ток 2,5 А или выше, лучше всего использовать тот, который имеет наименьшее сопротивление.Используемый здесь на самом деле имеет довольно высокое сопротивление 2,4 Ом. Это может фактически исказить результаты мАч. Это означает, что мои ячейки могут иметь немного большую емкость памяти, чем указано. Они у меня были под рукой, оставшиеся от предыдущего проекта. Этот конкретный HEXFET / MOSFET является SMD, но контакты затвора и истока выровнены с шагом 0,1 дюйма на макетной плате. Легко припаять и даже дает несколько переходных отверстий под сливным язычком для добавления радиатора под плату, если это необходимо.
Плохое изображение и плохая пайка… немного скрутил. Резистор является подтягивающим элементом на затворе.
Странные заголовки для динамика и ЖК-дисплея переработаны из старого принтера, который я разорвал. Я использовал 6-позиционную гнездовую секцию для нагрузочного резистора, поэтому при необходимости я могу изменить нагрузку. Мне просто нужно не забыть изменить код, чтобы он соответствовал тому, что я использую. 3 позиции на каждом конце параллельны, поэтому я могу подобрать сопротивление любой нагрузке мА, которую я хочу использовать, в соответствии с типом проверяемой ячейки.
Нижний правый винтовой блок предназначен для подачи питания 5 В, верхний левый блок предназначен для подключения тестовой ячейки.
«Крысиное гнездо» проводки точка-точка для выполнения соединений. Возможно, мне стоило использовать несколько разных цветов, чтобы упростить отслеживание, если у меня возникнут проблемы позже.
Интерфейсная плата I2C / TWI / SPI. Дешево на eBay или Aliexpress, если вы не против подождать 4-6 недель доставки. Можно купить в любой точке мира в Интернете.
Второй вид ЖК-дисплея, показывающий изменения от титульного изображения.
Еще предстоит сделать для этого случай, может даже потребоваться заменить блоки винта на что-то другое.
ВыводыЕще одна вещь, над которой я сейчас работаю в этом проекте, – это изменение процедуры кнопки с опроса на управляемое прерыванием. Я не большой поклонник использования функции задержки при кодировании без крайней необходимости. В этом случае есть более эффективные способы кодирования нажатия кнопок. Я также буду искать более эффективные способы обновления ЖК-дисплея.
Если вы создадите один из них и внесете изменения в код в соответствии с этими строками, сообщите мне. Мы можем сравнить заметки и сделать этот проект лучше!
Тестер емкости аккумулятора Arduino V2.0 – Поделиться проектом
ВВЕДЕНИЕ С шести лет я подумал, что было бы круто сделать своего собственного веб-кастера. Не зная тогда многого, я подумал, что могу использовать леску с присоской на конце, и это может помочь. 3D-принтеры только становились доступными, а у нас их в то время не было. Итак, идея проекта была отложена.С тех пор мы с папой стали Творцами. Это натолкнуло меня на мысль, что, если бы в «Стихах-пауках» был другой персонаж – скажем, 14 лет, единственный ребенок, выросший со старыми моторами и механическими частями в подвале и электронными приборами. У него накопилось два 3D-принтера и сварщик. В 9 лет он открыл канал Maker (Raising Awesome). Его отец импульсивно купил швейную машинку в Prime Day, и ТОГДА, в 14 лет, его укусил радиоактивный жук Maker … ну, паукообразный. Сначала он был Создателем, а затем получил свои паучьи способности.На что был бы похож этот персонаж? Итак, мы придумали перчатку Webslinger Gauntlet и Spidey-Sense Visual AI Circuit. ДИЗАЙН ПРОЕКТА WebSlinger В перчатке Webslinger находится 16-граммовый картридж с углекислым газом, с помощью которого можно выстрелить в крючок, привязанный к кевлару. Для этого не требуется никакого микроконтроллера, только клапан, который вы найдете для накачивания велосипедных шин. У него будет двигатель в перчатке, чтобы отследить кевлар. Spider-SenseКамера и amp; датчик приближения был вшит в спину рубашки. Raspberry Pi A + служил мозгом для всего костюма, управляя всеми датчиками и камерами внутри костюма.Наряду с этим мы использовали Pi SenseHat со встроенным дисплеем RGB для изменения логотипов, например, при срабатывании «Spidey Sense». За время этого конкурса я смог выиграть последний костюм на Хеллоуин. Вы можете найти модель на нашем сайте GitHub: https://github.com/RaisingAwesome/Spider-man-Into-the-Maker-Verse/tree. /master. Это код для запуска RGB и вибрации: from sense_hat import SenseHat время импорта импортировать RPi.GPIO как GPIO # Режим GPIO (ПЛАТА / BCM) GPIO.setmode (GPIO.BCM) # установить контакты GPIO GPIO_ECHO = 9 GPIO_TRIGGER = 10 GPIO_VIBRATE = 11 # установить направление GPIO (IN / OUT) GPIO.setup (GPIO_TRIGGER, GPIO.OUT) GPIO.setup (GPIO_ECHO, GPIO.IN) GPIO.setup (GPIO_VIBRATE, GPIO.OUT) смысл = SenseHat () г = (0, 255, 0) б = (0, 0, 255) у = (255, 255, 0) ш = (255,255,255) г = (204, 0, 0) a1 = [ б, г, б, б, б, б, г, б, б, г, б, б, б, б, г, б, б, б, г, г, г, г, б, б, б, б, б, г, г, б, б, б, г, г, г, г, г, р, г, г, б, б, б, г, г, б, б, б, б, б, г, б, б, г, б, б, б, г, б, б, б, б, г, б ] a2 = [ б, б, г, б, б, г, б, б, б, г, б, б, б, б, г, б, б, б, г, г, г, г, б, б, г, б, б, г, г, б, б, г, б, г, г, г, г, г, г, б, г, б, б, г, г, б, б, г, б, б, г, б, б, г, б, б, б, б, г, б, б, г, б, б ] a3 = [ г, б, б, б, б, б, б, г, б, г, б, б, б, б, г, б, б, б, г, г, г, г, б, б, г, б, б, г, г, б, б, г, б, г, г, г, г, г, г, б, г, б, б, г, г, б, б, г, б, б, г, б, б, г, б, б, б, г, б, б, б, б, г, б ] def animate (): # dist дано в футах.# скорость рассчитывается по линейному уравнению y = mx + b, где b = 0 и m = 0,1 sense.set_pixels (a1) time.sleep (0,05 * расстояние ()) sense.set_pixels (a2) time.sleep (0,05 * расстояние ()) sense.set_pixels (a1) time.sleep (0,05 * расстояние ()) sense.set_pixels (a3) time.sleep (0,05 * расстояние ()) def distance (): # Возвращает расстояние в футах StartTime = time.time () timeout = time.time () timedout = Ложь # установите для Trigger значение HIGH, чтобы подготовить систему GPIO.вывод (GPIO_TRIGGER, True) # установите Триггер через 0,00001 секунды (10 мкс) на НИЗКИЙ, чтобы отправить пинг от датчика time.sleep (0,00010) GPIO.output (GPIO_TRIGGER, ложь) # чтобы не ждать вечно, установим тайм-аут, если что-то пойдет не так. а GPIO.input (GPIO_ECHO) == 0: # если мы не получили ответ, чтобы сообщить нам, что он собирается пинговать, двигайтесь дальше. # датчик должен сработать, сделать свое дело и начать отчитываться через миллисекунды.StartTime = time.time () если (time.time () & gt; тайм-аут + .025): timedout = True перерыв #print (“Истекло время ожидания эхо от низкого до высокого:”, время ожидания) timeout = Время начала StopTime = Время начала а GPIO.input (GPIO_ECHO) == 1: # если мы не получим отскока на датчике с верхней границей его диапазона обнаружения, двигайтесь дальше. # Ультразвук движется со скоростью звука, поэтому он должен возвращаться, по крайней мере, # быстро для вещей, находящихся в пределах допустимого диапазона обнаружения.timedout = Ложь StopTime = time.time () если (time.time () & gt; тайм-аут + .025): timedout = True перерыв #print (“Тайм-аут эха от высокого до низкого:”, время ожидания) # записываем время, когда оно вернулось к датчику # разница во времени между стартом и прибытием TimeElapsed = StopTime – Время начала # умножаем на звуковую скорость (34300 см / с) # и разделим на 2, потому что он должен пройти через расстояние и обратно # затем преобразовать в футы, разделив все на 30.48 см на фут расстояние = (Истекшее время * 17150) / 30,46 #print (“Расстояние:”, расстояние) если (расстояние & lt; .1): расстояние = 5 distance = round (расстояние) если расстояние & lt; 5: вибрировать () обратное расстояние def vibrate (): # если что-то очень близко, вибрируйте spidey-sense #code pending GPIO.output (GPIO_VIBRATE, Истина) time.sleep (.1) GPIO.output (GPIO_VIBRATE, ложь) # Следующая строка позволит этому скрипту работать автономно, или вы можете # импортировать сценарий в другой сценарий, чтобы использовать все его функции.если __name__ == ‘__main__’: пытаться: GPIO.output (GPIO_TRIGGER, ложь) GPIO.output (GPIO_VIBRATE, ложь) время сна (1) в то время как True: анимировать () # Следующая строка – это пример из импортированной библиотеки SenseHat: # sense.show_message («Шон любит Бренду и Коннора !!», text_colour = желтый, back_colour = синий, scroll_speed = .05) # Обработка нажатия CTRL + C для выхода кроме KeyboardInterrupt: print (“\ n \ nВыполнение Spiderbrain остановлено.\ n “) GPIO.cleanup () Визуальный AII Если вы видели Человека-паука: Возвращение домой, вы бы знали о совершенно новом ИИ под брендом Старка, Карен, которую Питер использует в своей маске, чтобы помочь ему в миссиях. Карен была разработана, чтобы иметь возможность выделять угрозы и предупреждать Питера о его окружении, а также управлять многими функциями его костюма. Хотя создание чат-бота с ИИ, который отвечает голосом и чувством эмоций, может быть не самой простой задачей для этого соревнования, мы все же задумались, чтобы включить способ создания этого искусственного «паучьего чутья».«Мы решили, что сейчас самое подходящее время, чтобы воспользоваться всплеском популярности Microsoft Azure и API машинного зрения, предоставляемого Microsoft. Мы создали решение« видеть в темноте »с Raspberry Pi Model A и камера NoIR: облачный сервис Microsoft Computer Vision может анализировать изображения, снятые камерой Raspberry Pi (также известной как моя камера Pi-der), прикрепленной к ремню. Чтобы активировать это сверхшестое чувство, у меня есть как только акселерометр Sense Hat стабилизируется, снимок будет сделан автоматически.Используя личную точку доступа моего мобильного телефона, API Azure анализирует изображение, а пакет eSpeak Raspberry Pi сообщает мне об этом через наушник. Это позволяет костюму определять, приближается ли за мной машина или злой злодей. Python Visual AI для Microsoft Azure Machine Vision: import os запросы на импорт из Picamera импорт PiCamera время импорта # Если вы используете блокнот Jupyter, раскомментируйте следующую строку. #% matplotlib встроенный import matplotlib.pyplot как plt из PIL импорта изображения из io импорт BytesIO камера = PiCamera () # Добавьте ключ подписки Computer Vision и конечную точку в переменные среды. subscription_key = “ЗДЕСЬ ВАШ КЛЮЧ !!!” endpoint = “https://westcentralus.api.cognitive.microsoft.com/” Analyse_url = конечная точка + “видение / версия 2.0 / анализ” # Установите image_path равным локальному пути к изображению, которое вы хотите проанализировать. image_path = “image.jpg” def spidersense (): камера.start_preview () время сна (3) camera.capture (‘/ home / spiderman / SpiderBrain / image.jpg’) camera.stop_preview () # Считываем изображение в байтовый массив image_data = open (image_path, “rb”). read () headers = {‘Ocp-Apim-Subscription-Key’: subscription_key, ‘Content-Type’: ‘application / octet-stream’}. params = {‘visualFeatures’: ‘Категории, Описание, Цвет’} ответ = запросы.post ( analysis_url, headers = headers, params = params, data = image_data). отклик.Raise_for_status () # Объект “анализ” содержит различные поля, описывающие изображение. Большинство # соответствующий заголовок для изображения получается из свойства ‘description’. анализ = response.json () image_caption = analysis [“описание”] [“captions”] [0] [“текст”]. capitalize () the_statement = “espeak -s165 -p85 -ven + f3 \” Коннор. Я вижу “+ \” “+ image_caption +” \ “–stdout | aplay 2 & gt; / dev / null” os.system (the_statement) #print (image_caption) паучье чувство () СОЗДАЙТЕ ВИДЕО Чтобы увидеть все это вместе, вот наше видео о сборке:
DIY Тестер емкости LiPo аккумулятора
Перфорированная плата или сборная печатная плата
Arduino Nano
Резисторы мощности 10Вт – 7.8 Ом
Шунтирующие резисторы 10Вт – 0,2 Ом
OLED-экран
Конденсаторы фильтра– 100нФ – (код 103) – для сглаживания входных показаний
N-канальный MOSFET – логический уровень – SI2302 (SMD)
ПИН-код:
A0 – Аналоговое считывание напряжения батареи
A1 – Аналоговое считывание напряжения шунта
D9 – драйвер затвора mosfet
A4 – SDA для LCD
A5 – SCL для ЖК-дисплея
Vcc – мощность в
Gnd – общий для Arduino и минус батареи
заглушки 100nf на A0 и A1 для сглаживания аналоговых значений
R1 – R8 – резисторы, включенные параллельно.На его место можно поставить одиночный силовой резистор.
R9 и R10 – параллельные шунтирующие резисторы. Вы можете использовать любой из них или оба, чтобы получить желаемое сопротивление.
Принцип работы
Емкость любой батареи измеряется в мАч (миллиампер-час) или Ач (ампер-час) в зависимости от размера батарей, для свинцово-кислотной батареи или литиево-фосфатной батареи (LiFePO4) емкость батареи указывается в Ач, в то время как для небольших литиевых батарей она упоминается. в мАч.
Емкость аккумулятора – это количество энергии, которое оно может обеспечить от полной зарядки до полной разрядки. Так, например, липо-аккумулятор емкостью 2200 мАч означает, что он может выдавать максимум 2200 мА или 2,2 А в течение 1 часа или 2,2 мА в течение 1000 часов.
Таким образом, чтобы рассчитать общую емкость батареи, нам нужно рассчитать ток, потребляемый за определенный период времени.
Общая емкость (Q) = амперы * часы или Q = мА * 1000 * часы
Используя Arduino, вычислить ток напрямую невозможно, но мы можем рассчитать напряжение с помощью аналоговых входных контактов.Тогда мы можем получить ток (I), используя закон Ома.
Здесь мы рассчитаем падение напряжения на известном сопротивлении (шунте), чтобы получить ток и использовать его для расчета емкости.
В = I * R, поэтому I = V / R (закон Ома) – I – ток в амперах, V – в вольтах, R – сопротивление в омах
Но для любой химии батареи напряжение не остается постоянным во время разряда батареи, поэтому напряжение будет постепенно уменьшаться во время разряда.Поэтому нам нужно проверять напряжение батареи каждую секунду, по крайней мере, чтобы получить приличную точность общей емкости. По мере того, как напряжение будет уменьшаться, будет уменьшаться и ток.
Таким образом, мы должны вычислять ток каждую секунду и использовать это текущее значение, чтобы получить нашу пропускную способность каждую секунду. i1 = падение напряжения / сопротивление шунта – ток в каждую секунду. В Arduino время рассчитывается в миллисекундах, поэтому нам нужно преобразовать эти миллисекунды в часы. так 1 миллисекунда – 1/3600000 часов.Мы рассчитываем ток каждую секунду (1000 миллисекунд). таким образом, q1 = ток * время (i1 * прошедшее время) – это емкость, рассчитанная за первую секунду процесса разряда батареи. Точно так же нам нужно рассчитать q2, q3, q4 … qn до конца процесса разряда. для элемента LiPo максимальное напряжение составляет 4,2 вольта, а минимальное безопасное напряжение составляет 3,2 или 2,9 вольт. Поэтому нам нужно рассчитать емкость, используемую каждую секунду, пока напряжение не достигнет минимума, а затем сложить все индивидуальные емкости, чтобы получить окончательную общую емкость.Q = q1 + q2 + q3 + q4 + .. + qn.
Здесь я взял сопротивление шунта 0,2 Ом. Чтобы ограничить ток примерно до 500 мА при максимальном напряжении 4,2 В, я подключил последовательно сопротивление 7,8 Ом, таким образом получив общее сопротивление 8 Ом. R = V / I, R = 4,2 / 0,5 = 8,4 Ом – в идеале, чтобы получить ток 500 мА, сопротивление потребляемого тока должно быть 8,4 Ом, поэтому ток при 4,2 В = 4,2 / 8 = 525 мА (I = V / R) – когда напряжение макс., аккумулятор полностью заряжен. Ток при 3,2 В = 3,2 / 8 = 400 мА Кроме того, все резисторы являются силовыми резисторами, способными рассеивать мощность не менее 5 Вт, оптимальная мощность – 10 Вт.power = V * I = 4,2 * 0,525 = 2,2 Вт – максимальная мощность, рассеиваемая резисторами. мощность = В * I = 3,2 * 0,4 = 1,28 Вт В качестве примечания, если у вас нет силовых резисторов, вы можете использовать резисторы 1/2 Вт параллельно. Пять резисторов 1 / 2Вт 40 Ом дадут вам эффективное сопротивление 8 Ом, а затем вы можете последовательно добавить к ним подходящий шунтирующий резистор ….
Подробнее ”Создайте самодельный измеритель заряда аккумулятора с Arduino
В этой статье я собираюсь объяснить, как мы можем спроектировать и собрать измеритель заряда батареи путем сборки схемы с Arduino.
Очень часто в доме можно встретить различные электрические устройства, работающие от батарей. Иногда мы можем сомневаться, сломано ли устройство или разрядились батареи.
Зарегистрируйтесь в AWS Data & Analytics Conclave >>Измеритель заряда аккумулятора с платой Arduino
Мы будем использовать Arduino для считывания напряжения, подаваемого батареей через аналоговый вход. В зависимости от этого напряжения мы зажжем светодиод одного цвета.Если аккумулятор новый, загорится зеленый светодиод. Если аккумулятор не новый и часть его энергии израсходована, мы зажжем желтый светодиод. Наконец, если батарея разряжена или не обеспечивает достаточного напряжения, мы зажжем красный светодиод.
Мы должны быть очень осторожны с типом батареи, которую мы собираемся измерять. Очень опасно подавать на аналоговые контакты Arduino более 5 В. Если мы хотим измерить батареи, мы можем сделать это только с батареями AA, AAA, C и D. Они используются в элементах управления телевизором, игрушках и даже для питания Arduino.
Будьте осторожны с батареями на 9 В, квадратными. Как я уже сказал ранее, эти батареи намного превышают предел в 5 В. Мы также должны быть осторожны с батареями, так как это будет зависеть от напряжения, которое они подают. Проверьте это перед подключением чего-либо, что действительно меньше или равно 5 В.
Компоненты Arduino, которые мы собираемся использоватьДавайте посмотрим, какие компоненты нам понадобятся для этой схемы.
1. Arduino UNO или любая плата Arduino
2.Макетная плата, на которой мы будем подключать компоненты
3. Кабели для подключения компонентов к плате
4. 3 резистора 220 Ом
5. 1 резистор 10 кОм
6. 1 красный светодиод 5 мм
7. 1 желтый светодиод 5 мм
8. 1 зеленый светодиод 5 мм
Как видите, это очень простая схема. С 3 светодиодами и 4 резисторами этого достаточно, чтобы построить измеритель заряда батареи с Arduino.
Создание схемы с помощью ArduinoПосле того, как вся информация собрана, приступаем к сборке.На следующем изображении вы сможете увидеть, как следует соединять различные компоненты. Обратите особое внимание на резисторы.
Давайте посмотрим, как были соединены компоненты:
В первую очередь следует обратить внимание на светодиоды. Каждый из них подключен последовательно с резистором 220 Ом, чтобы продлить срок их службы. Зеленый светодиод подключен к контакту 2, желтый светодиод подключен к контакту 3, а красный светодиод подключен к контакту 4. Это важно помнить при программировании.
Для измерения заряда батареи я приложил сопротивление понижению. Этот тип сопротивления поддерживает низкое логическое состояние, то есть 0 В. Важно использовать этот тип резистора, поскольку, когда у нас нет подключенной батареи для измерения, у нас есть неопределенное состояние на входе аналогового вывода, которое заставляет его колебаться и, возможно, до тех пор, пока не загорятся некоторые светодиоды. Вы можете попробовать убрать это сопротивление, и вы увидите результат.
Положительный полюс батареи подключен к понижающему сопротивлению и аналоговому входу A0.Другой конец сопротивления. Наконец, отрицательный полюс батареи должен быть подключен к земле Arduino.
Программирование измерителя заряда батареи с помощью ArduinoПришло время программной части. Первое, что мы должны сделать, это поднять проблему или алгоритм, которого мы хотим достичь. Как только мы все проясним, мы можем приступить к программированию. Помните, что алгоритм – это последовательность упорядоченных шагов, которые мы должны выполнить для достижения цели. В данном случае наша цель – измерить заряд батареи с помощью Arduino.
Алгоритм
В этом разделе я подробно опишу шаги, которые мы должны выполнить, не написав ни единой строчки кода, мы сделаем это позже, когда у нас будет четкое представление о том, что мы должны делать.
1. Считайте аналоговый пин, куда мы подключили аккумулятор
2. Вычислите напряжение по полученному нами значению
3. Оцените напряжение
Смотрите также3.1 Если он больше или равен максимальному порогу
3.1.1 Включаем зеленый светодиод
3.2 Если он меньше максимального порога и больше среднего порога
3.2.1 Включаем желтый светодиод
3,3 Если он меньше среднего порога и больше минимального порога
3.3.1 Включаем красный светодиод
3.4 В любом другом случае сценарий
3.4.1 Не зажигаем светодиоды
4. Выключаем все светодиоды
Теперь проанализируем алгоритм, который мы собираемся реализовать, чтобы сделать вывод, что использование 3-х пороговых значений:
• Максимальный порог: указывает, что аккумулятор полностью заряжен.
• Средний порог: от этого порога до максимального порога батарея использовалась, но все еще имеет заряд.
• Минимальный порог: от этого порогового значения до среднего порогового значения батарея не выдает достаточно энергии. Ниже этого порога мы интерпретируем, что батарея не подключена.
Окончательный кодПрисоединяйтесь к нашему серверу Discord. Станьте частью интересного онлайн-сообщества. Присоединиться здесь.
Подпишитесь на нашу рассылку новостей
Получайте последние обновления и актуальные предложения, поделившись своей электронной почтой.Д-р Рауль В. РодригесДекан школы бизнеса Woxsen. Он является зарегистрированным экспертом в области искусственного интеллекта, интеллектуальных систем, многоагентных систем Европейской комиссии и был номинирован на список Forbes 30 Under 30 Europe 2020.
Свинцово-кислотный аккумулятор12 В, индикатор емкости, прибор для измерения мощности со светодиодным дисплеем для Arduino
Технические характеристики:
Рабочий ток: 5-15 мА (с подсветкой)
Рабочее напряжение: 6-12 В
Энергетическое разрешение: 1%
Точность вольтметра: 1%
Использование диапазона температур: -20-70 градусов
Рабочая влажность: 10-80% (без конденсации)
Черный провод для подключения отрицательного электрода
Красный провод для подключения положительного электрода
Внешний размер : 48 × 29 × 21 мм
Размеры отверстия: 45.5 × 26,5 мм
Как использовать:
1. Потяните белую кнопку на задней стороне примерно на 3 секунды, пока она не покажет «1-U», и отпустите ее. Снова потяните на 1 секунду, пока не появится «2-b», и отпустите. Снова потяните его еще на 1 секунду, пока не появится «3-c», и отпустите. Потяните его еще раз на 1 секунду, пока не появится «4-d».
2. Когда отобразится «1-U», нажмите белую кнопку на 3 секунды, после чего можно будет настроить прибор для измерения напряжения. Потянуть подольше, напряжение поднимется.Потом потяните еще дольше, напряжение упадет. Делайте это снова и снова. Для сохранения и выхода автоматически после мигания экрана.
3. Когда отображается «2-b», вы можете изменить тип батареи.
12 В: 1 шт. Свинцово-кислотная батарея 12 В
3,7 В: 1 литий-полимерная батарея 3,7 В
3,2 В: 1 шт. 3,2 В литий-железо-фосфатная батарея
1,2 В: 1 шт. 1,2 В NiMH аккумулятор
4. Когда отображается «3-c», вы можете отрегулировать количество батарей
Пожалуйста, обратитесь к следующему:
12V Свинцово-кислотная батарея: 1-8шт
3.Литий-полимерный аккумулятор 7 В: 2-28 шт.
Литий-железо-фосфатный аккумулятор 3,2 В: 3-32 шт.
Никель-металлгидридный аккумулятор 1,2 В: 10-70 шт.
5. Когда отображается «4-d», вы можете настроить режим отображения. «V» – режим напряжения. «%» – это процентный режим. «V%» – это режим напряжения и процентного цикла.
Параметры отображения емкости:
Напряжение батареи> 11,2 В, 1 сетка
Напряжение батареи> 12 В, 2 индикатора сетки
Напряжение батареи> 12.5 В, 3 индикатора сетки
Напряжение аккумулятора> 13,3 В, 4 индикатора сетки
Когда напряжение аккумулятора <11,2 В, все четыре сетки отключаются, что означает, что вам необходимо сразу же зарядить аккумулятор.
В пакет включено:
1 цифровой тестер емкости аккумулятора 12 В
Тестер емкости аккумулятора – Hackster.io
/ * Conexiones // ПДД 21 // SCL 22 ** MOSI - вывод 23 ** MISO - вывод 19 ** SCK - контакт 18 ** CS - вывод 5 (сброс вывода * / // Олед #include#include // Коммуникацин I2C #include #include #define SCREEN_WIDTH 128 // Привязка OLED-дисплея, пиксели #define SCREEN_HEIGHT 64 // OLED-дисплей альт, в пикселях #define OLED_RESET -1 // для сравнения вывода сброса с ESP32 Отображение Adafruit_SSD1306 (SCREEN_WIDTH, SCREEN_HEIGHT, & Wire, OLED_RESET); // INA219 #include // Нет sera necesario ya que est declarado una vez #include Adafruit_INA219 ina219; напряжение поплавкового шунта = 0; напряжение на шине поплавка = 0; float current_mA = 0; напряжение поплавковой нагрузки = 0; float power_mW = 0; с плавающей точкой Capacidad = 0; // Пульсадор const int pulsador = 23; int estado = 0; // Таймер беззнаковый длинный таймер; unsigned long timerOn; // Tarjeta SD #include "FS.час" #include "SD.h" #include #define SD_CS 5 // Закрепить CS для цели SD String dataMessage; Струнный таймпо; Струнная шина; Струнный шунт; Струнная карга; String corriente; Струнная потенция; // Отн. const int release = 12; // LM35 const int analogIn = 35; int RawValue = 0; плавающее напряжение = 0; float tempC = 0; float media = 0; float mediaT = 0; int i; void setup () { Serial.begin (115200); while (! Serial) { задержка (1);} digitalWrite (релиз, ВЫСОКИЙ); // Se cierra el rel // --------- Inicializa pantalla OLED --------- // отображать.начало (SSD1306_SWITCHCAPVCC, 0x3C); / * Настройка панталлы с директивой 0x3C * / display.clearDisplay (); / * Se limpia la pantalla * / display.setTextSize (1); / * Tamao del texto * / display.setTextColor (БЕЛЫЙ); / * Color del texto, esta pantalla slo permite texto en blanco * / // ----------------------------------------- // // --------- Датчик инициализации INA219 --------- // uint32_t currentFrequency; // Se Comprueba que el sensor est conectado if (! ina219.begin ()) { Serial.println («Датчик без контура»); отображать.setCursor (10,25); display.print («Датчик без конуса»); display.display (); в то время как (1) {задержка (10); } } Serial.println («Начальный сенсор»); // ----------------------------------------- // // --------- Iniciamos tarjeta SD y creamos fichero --------- // SD.begin (SD_CS); if (! SD.begin (SD_CS)) { Serial.println ("Fallo montando SD"); возвращение; } uint8_t cardType = SD.cardType (); if (cardType == CARD_NONE) { Serial.println ("Нет возможности вставить"); возвращение; отображать.setCursor (15,25); display.print («SD без сена»); display.display (); } Serial.println ("Iniciando tarjeta SD ..."); if (! SD.begin (SD_CS)) { Serial.println ("ERROR iniciando la tarjeta SD"); возвращение; // инициализация не удалась display.setCursor (15,25); display.print ("ОШИБКА инициализации SD"); display.display (); } Файл file = SD.open ("/ data.txt"); // Se abre el fichero data.txt if (! file) {// Si el fichero no existe se crea y se le aaden los cabeceros Serial.println («Нет никакого изображения»); Серийный.println ("Creando fichero ..."); writeFile (SD, "/data.txt", "Tiempo, Bus, Shunt, Carga, Corriente, Potencia, Capacidad, Temeperatura \ r \ n"); // Cabeceros // writeFile (SD, "/data.txt", "Идентификатор чтения, дата, час, температура \ r \ n"); } еще { Serial.println («Existe el fichero»); } file.close (); // ------------------------------------------------ -------- // // --------- Отн. --------- // pinMode (релиз, ВЫХОД); // определение булавки como salida // ---------------------- // // --------- Начальная программа с ботом --------- // pinMode (пульсадор, ВХОД); // Declaramos el pulsador como entrada отображать.setCursor (15,25); display.print ("Pulsar bot"); display.write (162); display.print ("n para iniciar"); display.display (); while (estado! = 1) {// Hasta que no se pulsa el botn no se inicia el programa para asegurar estado = digitalRead (пульсадор); // que el montaje est preparado if (estado == HIGH) { Serial.println ("Pulsador pulsado"); estado = 1; display.clearDisplay (); } } digitalWrite (релиз, LOW); // Se cierra el rel задержка (1000); // ------------------------------------------------ ---- // } void loop () { // --------- Датчик Mediciones --------- // напряжение шунта = ina219.getShuntVoltage_mV (); busvoltage = ina219.getBusVoltage_V (); current_mA = ina219.getCurrent_mA (); power_mW = ina219.getPower_mW (); напряжение нагрузки = напряжение на шине + (напряжение шунта / 1000); емкость = емкость + (ток_мА * 5/3600); Serial.print ("Автобус Voltaje:"); Serial.print (напряжение на шине); Serial.println ("V"); // Нет интереса Serial.print ("Shunt Voltaje:"); Serial.print (шунтирующее напряжение); Serial.println («мВ»); Serial.print ("Carga Voltaje:"); Serial.print (напряжение нагрузки); Serial.println ("V"); Серийный.печать ("Корриенте:"); Последовательный. Отпечаток (current_mA); Serial.println («мА»); Serial.print ("Potencia:"); Serial.print (мощность_мВт); Serial.println («мВт»); Serial.print ("Tiempo en ejecucin:"); Serial.print (timerOn); Serial.println ("с"); Serial.print ("Capacidad:"); Serial.print (емкость); Serial.println («мА»); Serial.println (""); // ----------------------------------- // // ------------ LM35 ------------ // media = 0; mediaT = 0; for (i = 0; i <10; i ++) { RawValue = analogRead (analogIn); media = (RawValue / 2048.0) * 4600; mediaT = ((mediaT + media) / 10); } RawValue = analogRead (analogIn); Напряжение = (RawValue / 2048.0) * 4600; // 5000, чтобы получить милливоты. tempC = Напряжение * 0,1; Serial.print ("\ t Температура в C ="); Serial.print (tempC, 1); Serial.print ("\ t Media ="); Serial.println (mediaT, 1); // ---------------------------- // // --------- Tiempo en ejecicin --------- // if (estado == 1) { таймер = миллис (); // timerOn = millis () - таймер; estado = 2; } timerOn = (millis () - таймер) / 1000; // ------------------------------------- // // --------- Данные Mostrar OLED --------- // задержка (10); отображать.clearDisplay (); // display.setTextSize (1); display.setCursor (0,0); display.print ("Температура:"); display.print (mediaT, 1); display.print ((char) 247); display.println («C»); display.setCursor (0,10); display.print ("Shunt Volt:"); display.print (шунтирующее напряжение); display.println («мВ»); display.setCursor (0,20); display.print ("Carga Volt:"); display.print (напряжение нагрузки); display.println ("V"); display.setCursor (0,30); display.print ("Корриенте:"); дисплей.печать (ток_мА); display.println («мА»); отображать.setCursor (0,40); display.print ("Горшок:"); display.print (мощность_мВт); display.println («мВт»); display.setCursor (0,50); display.print ("Tiempo:"); display.print (timerOn); display.print ("s"); display.setCursor (90,50); display.print (емкость); display.display (); // ------------------------------------ // // --------- Данные по каргару SD --------- // tiempo = timerOn; bus = напряжение на шине; шунт = шунтирующее напряжение; carga = напряжение нагрузки; corriente = current_mA; потенция = мощность_мВт; Capacidad; mediaT; logSDCard (); // --------------------------------- // // --------- Proteccin bateria mediante rel --------- // в то время как (напряжение нагрузки <= 2.8) { digitalWrite (релиз, ВЫСОКИЙ); // Se abre el rel para proteger la bateria y evitar que se descargue ms // horas (timerOn); int horas = (timerOn / 3600); // Pasamos los segndos a horas, minutos y segundos int minutos = ((timerOn-horas * 3600) / 60); int segundos = timerOn- (часов * 3600 + минут * 60); display.clearDisplay (); display.setCursor (0,0); display.print ("Capacidad:"); display.setCursor (0,15); display.print (емкость); display.print («мА»); display.setCursor (0,30); display.print ("Tiempo:"); отображать.setCursor (0,45); display.print (хорас); display.print (":"); display.print (минуты); display.print (":"); display.print (segundos); display.setCursor (55,30); display.print ("Температура:"); display.setCursor (55,45); display.print (mediaT); display.print ((char) 247); display.print («C»); display.display (); Serial.print ("Capacidad:"); Serial.print (емкость); Serial.println («мА»); Serial.print ("Тьемпо:"); Серийный принт (хорас); Serial.print (":"); Serial.print (протоколы); Serial.print (":"); Серийный.println (вторые); Serial.print ("Температура:"); Serial.print (mediaT); Serial.println ("C"); задержка (100000); } // ------------------------------------------------ - // задержка (5000); } // --------- Функции --------- // void logSDCard () { dataMessage = String (tiempo) + "," + String (bus) + "," + String (shunt) + "," + String (carga) + "," + String (corriente) + "," + String (потенция) ) + "," + Строка (capidad) + "," + строка (mediaT) + "\ r \ n"; Serial.print ("Сохранить данные:"); Serial.println (сообщение данных); appendFile (SD, "/ data.txt ", dataMessage.c_str ()); } // Escribir en la tarjeta SD (NO MODIFICAR NADA) void writeFile (fs :: FS & fs, const char * path, const char * message) { Serial.printf ("Файл записи:% s \ n", путь); Файл file = fs.open (путь, FILE_WRITE); if (! file) { Serial.println («Не удалось открыть файл для записи»); возвращение; } if (file.print (сообщение)) { Serial.println («Файл записан»); } еще { Serial.println («Ошибка записи»); } file.close (); } // Aadir cosas a la tarjeta (NO MODIFICAR NADA) void appendFile (fs :: FS & fs, const char * path, const char * message) { Серийный.printf ("Добавление к файлу:% s \ n", путь); Файл file = fs.open (путь, FILE_APPEND); if (! file) { Serial.println («Не удалось открыть файл для добавления»); возвращение; } if (file.print (сообщение)) { Serial.println («Сообщение добавлено»); } еще { Serial.println («Ошибка добавления»); } file.close (); } // void horas (int tiempo) { // int horas = (tiempo / 3600); // int minutos = ((tiempo-horas * 3600) / 60); // int segundos = tiempo- (horas * 3600 + minutos * 60); // Serial.print (horas); Serial.print (":"); Серийный.печать (минуты); Serial.print (":"); Serial.println (segundos); //} // --------------------------- //
индикатор емкости_батареи_sku__fit0466-DFRobot
- ДОМ
- СООБЩЕСТВО
- ФОРУМ
- БЛОГ
- ОБРАЗОВАНИЕ
- Контроллер
- DFR0010 Arduino Nano 328
- DFR0136 Сервоконтроллер Flyduino-A 12
- DFR0225 Romeo V2-Все в одном контроллере R3
- Arduino_Common_Controller_Selection_Guide
- DFR0182 Беспроводной геймпад V2.0
- DFR0100 Комплект для начинающих DFRduino для Arduino V3
- DFR0267 Блуно
- DFR0282 Жук
- DFR0283 Мечтательный клен V1.0
- DFR0296 Блуно Нано
- DFR0302 MiniQ 2WD Plus
- DFR0304 Беспроводной геймпад BLE V2
- DFR0305 RoMeo BLE
- DFR0351 Romeo BLE mini V2.0
- DFR0306 Блуно Мега 1280
- DFR0321 Узел Wido-WIFI IoT
- DFR0323 Блуно Мега 2560
- DFR0329 Блуно М3
- DFR0339 Жук Блуно
- DFR0343 Контроллер с низким энергопотреблением UHex
- DFR0355 SIM808 с материнской платой Leonardo
- DFR0392 DFRduino M0 материнская плата, совместимая с Arduino
- DFR0398 Контроллер роботов Romeo BLE Quad
- DFR0416 Bluno M0 Материнская плата
- DFR0575 Жук ESP32
- DFR0133 X-Board
- DFR0162 X-Board V2
- DFR0428 3.5-дюймовый сенсорный TFT-экран для Raspberry Pi
- DFR0494 Raspberry Pi ШАПКА ИБП
- DFR0514 DFR0603 IIC 16X2 RGB LCD KeyPad HAT V1.0
- DFR0524 5.5 HDMI OLED-дисплей с емкостным сенсорным экраном V2.0
- DFR0550 5-дюймовый TFT-дисплей с сенсорным экраном V1.0
- DFR0591 модуль дисплея raspberry pi e-ink V1.0
- DFR0592 Драйвер двигателя постоянного тока HAT
- DFR0604 HAT расширения ввода-вывода для Pi zero V1.0
- DFR0566 Шляпа расширения ввода-вывода для Raspberry Pi
- DFR0528 Шляпа ИБП для Raspberry Pi Zero
- DFR0331 Romeo для контроллера Edison
- DFR0453 DFRobot CurieNano - мини-плата Genuino Arduino 101
- TEL0110 CurieCore Intel® Curie Neuron Module
- DFR0478 Микроконтроллер FireBeetle ESP32 IOT (V3.0) с поддержкой Wi-Fi и Bluetooth
- DFR0483 FireBeetle Covers-Gravity I O Expansion Shield
- FireBeetle Covers-24 × 8 светодиодная матрица
- TEL0121 FireBeetle Covers-LoRa Radio 433 МГц
- TEL0122 FireBeetle Covers-LoRa Radio 915 МГц
- TEL0125 FireBeetle охватывает LoRa Radio 868MHz
- DFR0489 FireBeetle ESP8266 Микроконтроллер IOT
- DFR0492 FireBeetle Board-328P с BLE4.1
- DFR0498 FireBeetle Covers-Camera & Audio Media Board
- DFR0507 FireBeetle Covers-OLED12864 Дисплей
- DFR0508 FireBeetle Covers-Двигатель постоянного тока и шаговый драйвер
- DFR0511 FireBeetle Covers-ePaper Черно-белый дисплейный модуль
- DFR0531 FireBeetle Covers-ePaper Черно-белый и красный дисплейный модуль
- DFR0536 Плата расширения геймпада с микробитами
- DFR0548 Плата расширения микробитового драйвера
- ROB0148 micro: Maqueen для micro: bit
- ROB0150 Microbit Круглая плата расширения для светодиодов RGB
- MBT0005 micro IO-BOX
- SEN0159 Датчик CO2
- DFR0049 DFRobot Датчик газа
- TOY0058 Датчик атмосферного давления
- SEN0220 Инфракрасный датчик CO2 0-50000ppm
- SEN0219 Гравитационный аналоговый инфракрасный датчик CO2 для Arduino
- SEN0226 Датчик барометра Gravity I2C BMP280
- SEN0231 Датчик гравитации HCHO
- SEN0251 Gravity BMP280 Датчики атмосферного давления
- SEN0132 Датчик угарного газа MQ7
- SEN0032 Трехосный акселерометр - ADXL345
- DFR0143 Трехосевой акселерометр MMA7361
- Трехосный акселерометр серии FXLN83XX
- SEN0072 CMPS09 - Магнитный компас с компенсацией наклона
- SEN0073 9 степеней свободы - бритва IMU
- DFR0188 Flymaple V1.1
- SEN0224 Трехосевой акселерометр Gravity I2C - LIS2DH
- SEN0140 Датчик IMU с 10 степенями свободы, версия 2.0
- SEN0250 Gravity BMI160 6-осевой инерционный датчик движения
- SEN0253 Gravity BNO055 + BMP280 интеллектуальный 10DOF AHRS
- SEN0001 URM37 V5.0 Ультразвуковой датчик
- SEN0002 URM04 V2.0
- SEN0004 SRF01 Ультразвуковой датчик
- SEN0005 SRF02 Ультразвуковой датчик
- SEN0006 SRF05 Ультразвуковой датчик
- SEN0007 SRF08 Ультразвуковой датчик
- SEN0008 SRF10 Ультразвуковой датчик
- SEN0149 URM06-RS485 Ультразвуковой
- SEN0150 URM06-UART Ультразвуковой
- SEN0151 URM06-PULSE Ультразвуковой
- SEN0152 URM06-ANALOG Ультразвуковой
- SEN0153 Ультразвуковой датчик URM07-UART
- SEN0246 URM08-RS485 Водонепроницаемый гидролокатор-дальномер
- SEN0304 Ультразвуковой датчик URM09 (Gravity-I2C) (V1.0)
- SEN0304 Ультразвуковой датчик URM09 (Gravity-I2C) (V1.0)
- SEN0300 Водонепроницаемый ультразвуковой датчик ULS
- SEN0301 Водонепроницаемый ультразвуковой датчик ULA
- SEN0307 URM09 Аналог ультразвукового датчика силы тяжести
- SEN0311 A02YYUW Водонепроницаемый ультразвуковой датчик
- SEN0312 ME007YS Водонепроницаемый ультразвуковой датчик
- SEN0313 A01NYUB Водонепроницаемый ультразвуковой датчик
- DFR0066 SHT1x Датчик влажности и температуры
- DFR0067 DHT11 Датчик температуры и влажности
- SEN0137 DHT22 Модуль температуры и влажности
- DFR0023 Линейный датчик температуры DFRobot LM35
- DFR0024 Gravity DS18B20 Датчик температуры, совместимый с Arduino V2
- DFR0024 Gravity DS18B20 Датчик температуры, совместимый с Arduino V2
- SEN0114 Датчик влажности
- Датчик температуры TOY0045 TMP100
- TOY0054 SI7021 Датчик температуры и влажности
- SEN0206 Датчик инфракрасного термометра MLX
- SEN0227 SHT20 Водонепроницаемый датчик температуры и влажности I2C
- SEN0236 Gravity I2C BME280 Датчик окружающей среды Температура, влажность, барометр
- SEN0248 Gravity I2C BME680 Датчик окружающей среды VOC, температура, влажность, барометр
- DFR0558 Цифровой высокотемпературный датчик силы тяжести типа К
- SEN0308 Водонепроницаемый емкостный датчик влажности почвы
- SEN0019 Регулируемый переключатель инфракрасного датчика
- SEN0042 DFRobot Инфракрасный датчик прорыва
- SEN0143 SHARP GP2Y0A41SK0F ИК-датчик рейнджера 4-30 см
- SEN0013 Sharp GP2Y0A02YK ИК-датчик рейнджера 150 см
- SEN0014 Sharp GP2Y0A21 Датчик расстояния 10-80 см
- SEN0085 Sharp GP2Y0A710K Датчик расстояния 100-550 см
- Модуль цифрового ИК-приемника DFR0094
- DFR0095 Модуль цифрового ИК-передатчика
- SEN0018 Цифровой инфракрасный датчик движения
- DFR0107 ИК-комплект
- SEN0264 TS01 ИК-датчик температуры (4-20 мА)
- SEN0169 Аналоговый pH-метр Pro
- DFR0300-H Gravity: аналоговый датчик электропроводности (K = 10)
- DFR0300 Гравитационный аналоговый датчик электропроводности V2 K = 1
- SEN0165 Аналоговый измеритель ОВП
- SEN0161-V2 Комплект гравитационного аналогового датчика pH V2
- SEN0161 PH метр
- SEN0237 Гравитационный аналоговый датчик растворенного кислорода
- SEN0204 Бесконтактный датчик уровня жидкости XKC-Y25-T12V
- SEN0205 Датчик уровня жидкости-FS-IR02
- SEN0244 Gravity Analog TDS Sensor Meter для Arduino
- SEN0249 Комплект измерителя pH с аналоговым наконечником копья силы тяжести для применения в почве и пищевых продуктах
- SEN0121 Датчик пара
- SEN0097 Датчик освещенности
- DFR0026 Датчик внешней освещенности DFRobot
- TOY0044 УФ-датчик
- SEN0172 LX1972 датчик внешней освещенности
- SEN0043 TEMT6000 датчик внешней освещенности
- SEN0175 УФ-датчик v1.0-ML8511
- SEN0228 Gravity I2C VEML7700 Датчик внешней освещенности
- SEN0101 Датчик цвета TCS3200
- DFR0022 Датчик оттенков серого DFRobot
- Датчик отслеживания линии SEN0017 для Arduino V4
- SEN0147 Интеллектуальный датчик оттенков серого
- SEN0212 TCS34725 Датчик цвета I2C для Arduino
- SEN0245 Gravity VL53L0X Лазерный дальномер ToF
- SEN0259 TF Mini LiDAR ToF Laser Range Sensor
- SEN0214 Датчик тока 20A
- SEN0262 Гравитационный аналоговый преобразователь тока в напряжение для приложений 4 ~ 20 мА
- SEN0291 Gravity: Цифровой ваттметр I2C
- DFR0027 Цифровой датчик вибрации DFRobot V2
- DFR0028 DFRobot Датчик наклона
- DFR0029 Цифровая кнопка DFRobot
- DFR0030 DFRobot емкостный сенсорный датчик
- Модуль цифрового зуммера DFR0032
- DFR0033 Цифровой магнитный датчик
- DFR0034 Аналоговый звуковой датчик
- SEN0038 Колесные энкодеры для DFRobot 3PA и 4WD Rovers
- DFR0051 Аналоговый делитель напряжения
- DFR0052 Аналоговый пьезодисковый датчик вибрации
- DFR0076 Датчик пламени
- DFR0053 Аналоговый датчик положения ползуна
- DFR0054 Аналоговый датчик вращения V1
- DFR0058 Аналоговый датчик вращения V2
- Модуль джойстика DFR0061 для Arduino
- DFR0075 AD Клавиатурный модуль
- Модуль вентилятора DFR0332
- SEN0177 PM2.5 лазерный датчик пыли
- Модуль датчика веса SEN0160
- SEN0170 Тип напряжения датчика скорости ветра 0-5 В
- TOY0048 Высокоточный двухосевой датчик инклинометра, совместимый с Arduino Gadgeteer
- SEN0187 RGB и датчик жестов
- SEN0186 Метеостанция с анемометром Флюгер Дождь ведро
- SEN0192 Датчик микроволн
- SEN0185 датчик Холла
- FIT0449 DFRobot Speaker v1.0
- Датчик частоты сердечных сокращений SEN0203
- DFR0423 Самоблокирующийся переключатель
- SEN0213 Датчик монитора сердечного ритма
- SEN0221 Датчик угла Холла силы тяжести
- Датчик переключателя проводимости SEN0223
- SEN0230 Инкрементальный фотоэлектрический датчик угла поворота - 400P R
- SEN0235 Модуль поворотного энкодера EC11
- SEN0240 Аналоговый датчик ЭМГ от OYMotion
- SEN0232 Гравитационный аналоговый измеритель уровня звука
- SEN0233 Монитор качества воздуха PM 2.5, формальдегид, датчик температуры и влажности
- DFR0515 FireBeetle Covers-OSD Модуль наложения символов
- SEN0257 Датчик гравитационного давления воды
- SEN0289 Gravity: Цифровой датчик встряхивания
- SEN0290 Gravity: Датчик молнии
- DFR0271 GMR Плата
- ROB0003 Pirate 4WD Мобильная платформа
- Мобильная платформа ROB0005 Turtle 2WD
- ROB0025 NEW A4WD Мобильный робот с кодировщиком
- ROB0050 4WD MiniQ Полный комплект
- ROB0111 4WD MiniQ Cherokey
- ROB0036 Комплект роботизированной руки с 6 степенями свободы
- Комплект наклонно-поворотного устройства FIT0045 DF05BB
- ROB0102 Мобильная платформа Cherokey 4WD
- ROB0117 Базовый комплект для Cherokey 4WD
- ROB0022 4WD Мобильная платформа
- ROB0118 Базовый комплект для Turtle 2WD
- Робот-комплект ROB0080 Hexapod
- ROB0112 Мобильная платформа Devastator Tank
- ROB0114 Мобильная платформа Devastator Tank
- ROB0124 Мобильная платформа HCR с всенаправленными колесами
- ROB0128 Devastator Tank Мобильная платформа Металлический мотор-редуктор постоянного тока
- ROB0137 Explorer MAX Робот
- ROB0139 Робот FlameWheel
- DFR0270 Accessory Shield для Arduino
- DFR0019 Щит для прототипирования для Arduino
- DFR0265 IO Expansion Shield для Arduino V7
- DFR0210 Пчелиный щит
- DFR0165 Mega IO Expansion Shield V2.3
- DFR0312 Плата расширения Raspberry Pi GPIO
- DFR0311 Raspberry Pi встречает Arduino Shield
- DFR0327 Arduino Shield для Raspberry Pi 2B и 3B
- DFR0371 Экран расширения ввода-вывода для Bluno M3
- DFR0356 Щит Bluno Beetle
- DFR0412 Gravity IO Expansion Shield для DFRduino M0
- DFR0375 Cookie I O Expansion Shield V2
- DFR0334 GPIO Shield для Arduino V1.0
- DFR0502 Gravity IO Expansion & Motor Driver Shield V1.1
- DFR0518 Micro Mate - мини-плата расширения для микробита
- DFR0578 Gravity I O Expansion Shield для OpenMV Cam M7
- DFR0577 Gravity I O Expansion Shield для Pyboard
- DFR0626 MCP23017 Модуль расширения с IIC на 16 цифровых IO
- DFR0287 LCD12864 Экран
- DFR0009 Экран ЖК-клавиатуры для Arduino
- DFR0063 I2C TWI LCD1602 Модуль, совместимый с Gadgeteer
- Модуль DFR0154 I2C TWI LCD2004, совместимый с Arduino Gadgeteer
- Светодиодная матрица DFR0202 RGB
- DFR0090 3-проводной светодиодный модуль
- TOY0005 OLED 2828 модуль цветного дисплея.Совместимость с NET Gadgeteer
- Модуль дисплея TOY0006 OLED 9664 RGB
- Модуль дисплея TOY0007 OLED 2864
- Модуль дисплея FIT0328 2.7 OLED 12864
- DFR0091 3-проводной последовательный ЖК-модуль, совместимый с Arduino
- DFR0347 2.8 TFT Touch Shield с 4 МБ флэш-памяти для Arduino и mbed
- DFR0348 3.5 TFT Touch Shield с 4 МБ флэш-памяти для Arduino и mbed
- DFR0374 Экран LCD клавиатуры V2.0
- DFR0382 Экран со светодиодной клавиатурой V1.0
- DFR0387 TELEMATICS 3.5 TFT сенсорный ЖК-экран
- DFR0459 Светодиодная матрица RGB 8x8
- DFR0460 Светодиодная матрица RGB 64x32 - шаг 4 мм / Гибкая светодиодная матрица 64x32 - Шаг 4 мм / Гибкая светодиодная матрица 64x32 - Шаг 5 мм
- DFR0461 Гибкая светодиодная матрица 8x8 RGB Gravity
- DFR0462 Гибкая светодиодная матрица 8x32 RGB Gravity
- DFR0463 Gravity Гибкая светодиодная матрица 16x16 RGB
- DFR0471 Светодиодная матрица RGB 32x16 - шаг 6 мм
- DFR0472 Светодиодная матрица RGB 32x32 - шаг 4 мм
- DFR0464 Gravity I2C 16x2 ЖК-дисплей Arduino с подсветкой RGB
- DFR0499 Светодиодная матрица RGB 64x64 - шаг 3 мм
- DFR0506 7-дюймовый дисплей HDMI с емкостным сенсорным экраном
- DFR0555 \ DF0556 \ DFR0557 Gravity I2C LCD1602 Модуль ЖК-дисплея Arduino
- DFR0529 2.2-дюймовый ЖК-дисплей TFT V1.0 (интерфейс SPI)
- DFR0605 Gravity: Цифровой светодиодный модуль RGB
- FIT0352 Цифровая светодиодная водонепроницаемая лента с RGB-подсветкой 60LED м * 3 м
- DFR0645-G DFR0645-R 4-цифровой светодиодный сегментный модуль дисплея
- Артикул DFR0646-G DFR0646-R 8-цифровой светодиодный сегментный модуль дисплея
- DFR0597 Гибкая светодиодная матрица RGB 7x71
- DFR0231 Модуль NFC для Arduino
- Модуль радиоданных TEL0005 APC220
- TEL0023 BLUETOOH BEE
- TEL0026 DF-BluetoothV3 Bluetooth-модуль
- Модуль беспроводного программирования TEL0037 для Arduino
- TEL0044 DFRduino GPS Shield-LEA-5H
- TEL0047 WiFi Shield V2.1 для Arduino
- TEL0051 GPS GPRS GSM модуль V2.0
- TEL0067 Wi-Fi Bee V1.0
- TEL0073 BLE-Link
- TEL0075 RF Shield 315 МГц
- TEL0078 WIFI Shield V3 PCB Антенна
- TEL0079 WIFI Shield V3 RPSMA
- TEL0084 BLEmicro
- TEL0086 DF-маяк EVB
- TEL0087 USBBLE-LINK Bluno Адаптер для беспроводного программирования
- TEL0080 UHF RFID МОДУЛЬ-USB
- TEL0081 УВЧ RFID МОДУЛЬ-RS485
- TEL0082 UHF RFID МОДУЛЬ-UART
- TEL0083-A GPS-приемник для Arduino Model A
- TEL0092 WiFi Bee-ESP8266 Wirelss модуль
- Модуль GPS TEL0094 с корпусом
- TEL0097 SIM808 GPS GPRS GSM Shield
- DFR0342 W5500 Ethernet с материнской платой POE
- DFR0015 Xbee Shield для Arduino без Xbee
- TEL0107 WiFiBee-MT7681 Беспроводное программирование Arduino WiFi
- TEL0089 SIM800C GSM GPRS Shield V2.0
- Модуль приемника RF TEL0112 Gravity 315MHZ
- TEL0113 Gravity UART A6 GSM и GPRS модуль
- TEL0118 Gravity UART OBLOQ IoT-модуль
- Модуль TEL0120 DFRobot BLE4.1
- Bluetooth-адаптер TEL0002
- Модуль аудиоприемника Bluetooth TEL0108
- TEL0124 SIM7600CE-T 4G (LTE) Shield V1.0
- DFR0505 SIM7000C Arduino NB-IoT LTE GPRS Expansion Shield
- DFR0013 IIC для GPIO Shield V2.0
- Плата привода двигателя датчика DFR0057 - Версия 2.2
- DFR0062 Адаптер WiiChuck
- DFR0233 Узел датчика RS485 V1.0
- DFR0259 Arduino RS485 щит
- DFR0370 Экран CAN-BUS V2
- DFR0627 IIC для двойного модуля UART
- TEL0070 Multi USB RS232 RS485 TTL преобразователь
- DFR0064 386AMP модуль аудиоусилителя
- DFR0273 Экран синтеза речи
- DFR0299 DFPlayer Mini
- TOY0008 DFRduino Плеер MP3
- SEN0197 Диктофон-ISD1820
- DFR0420 Аудиозащитный экран для DFRduino M0
- DFR0534 Голосовой модуль
- SD2403 Модуль часов реального времени SKU TOY0020
- TOY0021 SD2405 Модуль часов реального времени
- DFR0151 Модуль Gravity I2C DS1307 RTC
- DFR0469 Модуль Gravity I2C SD2405 RTC
- DFR0316 MCP3424 18-битный канал АЦП-4 с усилителем с программируемым усилением
- DFR0552 Gravity 12-битный модуль I2C DAC
- DFR0553 Gravity I2C ADS1115 16-битный модуль АЦП, совместимый с Arduino и Raspberry Pi
- DFR0117 Модуль хранения данных Gravity I2C EEPROM
- Модуль SD DFR0071
- Плата привода двигателя датчика DFR0057 - Версия 2.2
- DFR0360 XSP - Программист Arduino
- DFR0411 Двигатель постоянного тока Gravity 130
- DFR0438 Яркий светодиодный модуль
- DFR0439 Светодиодные гирлянды красочные
- DFR0440 Модуль микровибрации
- DFR0448 Светодиодные гирлянды, теплый белый цвет
- Встроенный термопринтер DFR0503 - последовательный TTL
- DFR0504 Гравитационный изолятор аналогового сигнала
- DFR0520 Двойной цифровой потенциометр 100K
- DFR0565 Гравитационный цифровой изолятор сигналов
- DFR0563 Гравитация 3.Датчик уровня топлива литиевой батареи 7V
- DFR0576 Гравитационный цифровой мультиплексор I2C с 1 по 8
- DFR0117 Модуль хранения данных Gravity I2C EEPROM
- DRI0001 Моторный щит Arduino L293
- DRI0002 MD1.3 2A Двухмоторный контроллер
- DRI0009 Моторный щит Arduino L298N
- DRI0021 Драйвер двигателя постоянного тока Veyron 2x25A Brush
- DRI0017 2A Моторный щит для Arduino Twin
- Драйвер двигателя постоянного тока DRI0018 2x15A Lite
- Микродвигатель постоянного тока FIT0450 с энкодером-SJ01
- FIT0458 Микродвигатель постоянного тока с энкодером-SJ02
- DFR0399 Микро-металлический мотор-редуктор постоянного тока 75 1 Вт Драйвер
- DRI0039 Quad Motor Driver Shield для Arduino
- DRI0040 Двойной 1.Драйвер двигателя 5A - HR8833
- DRI0044 2x1.2A Драйвер двигателя постоянного тока TB6612FNG
- Драйвер двигателя постоянного тока DFR0513 PPM 2x3A
- DFR0523 Гравитационный цифровой перистальтический насос
- DRI0027 Digital Servo Shield для Arduino
- DRI0029 Сервопривод Veyron, 24 канала
- SER0044 DSS-M15S 270 ° 15KG Металлический сервопривод DF с аналоговой обратной связью
- DRI0023 Экран шагового двигателя для Arduino DRV8825
- DRI0035 TMC260 Щиток драйвера шагового двигателя
- DFR0105 Силовой щит
- DFR0205 Силовой модуль
- DFR0457 Контроллер мощности Gravity MOSFET
- DFR0564 Зарядное устройство USB для 7.Литий-полимерная батарея 4 В
- DFR0535 Менеджер солнечной энергии
- DFR0559 Солнечная система управления мощностью 5 В для подсолнечника
- DFR0559 Менеджер солнечной энергии 5 В
- DFR0580 Solar Power Manager для свинцово-кислотных аккумуляторов 12 В
- DFR0222 Реле X-Board
- Релейный модуль DFR0017, совместимый с Arduino
- DFR0289 Релейный контроллер RLY-8-POE
- DFR0290 RLY-8-RS485 8-релейный контроллер
- DFR0144 Релейный экран для Arduino V2.1
- DFR0473 Gravity Digital Relay Module Совместимость с Arduino и Raspberry Pi
- KIT0003 EcoDuino - Комплект для автомобильных заводов
- KIT0071 MiniQ Discovery Kit
- KIT0098 Пакет компонентов подключаемого модуля Breadboard
- Артикул DFR0748 Цветок Китти
- SEN0305 Гравитация: HUSKYLENS - простой в использовании датчик машинного зрения с искусственным интеллектом
- Подключение датчика к Raspberry Pi
- DFR0677 ШЛЯПА ONPOWER UPS для Raspberry Pi
