
Как подключить шаговый двигатель без контроллера
Шаговые двигатели присутствуют в автомобилях, принтерах, компьютерах, стиральных машинах, электробритвах и многих других устройствах из повседневного быта. Однако многие радиолюбители до сих пор не знают, как заставить такой мотор работать и что он вообще из себя представляет. Итак, давайте узнаем, как использовать шаговый двигатель.
Шаговые двигатели являются частью класса моторов, известных как безщеточные двигатели. Обмотки шагового двигателя являются частью статора. На роторе расположен постоянный магнит или, для случаев с переменным магнитным сопротивлением, зубчатый блок из магнитомягкого материала. Все коммутации производятся внешними схемами. Обычно система мотор — контроллер разрабатывается так, чтобы была возможность вывода ротора в любую, фиксированную позицию, то есть система управляется по положению. Цикличность позиционирования ротора зависит от его геометрии.
Типы шаговых двигателей
Существуют три основных типа шаговых двигателей: переменной индуктивности, двигатели с постоянными магнитами, и гибридные двигатели.
Двигатели переменной индуктивности используют только генерируемое магнитное поле на центральном валу, заставляющее вращаться и находиться на одной линии с напряжением электромагнитов.
Двигатели с постоянными магнитами похожи на них, за исключением того, что центральный вал поляризован у северного и южного магнитных полюсов, которые будут соответствующим образом поворачивать его в зависимости от того, какие электромагниты включены.
Гибридный мотор — это сочетание двух предыдущих. У его намагниченного центрального вала имеется два набора зубов для двух магнитных полюсов, которые затем выстраиваются в линию с зубами вдоль электромагнитов. В связи с двойным набором зубов на центральном валу, гибридный двигатель имеет наименьший доступный размер шага и поэтому является одним из наиболее популярных типов шаговых двигателей.
Униполярные и биполярные шаговые двигатели
Также существует ещё два типа шаговых двигателей: униполярные и биполярные. На фундаментальном уровне, эти два типа работать точно так же; электромагниты включены в последовательном виде, заставляя центральный вал двигателя вращаться.
Но униполярный шаговый двигатель работает только с положительным напряжением, а биполярный шаговый двигатель имеет два полюса — положительный и отрицательный.
То есть фактическая разница между этими двумя типами заключается в том, что для однополярных требуется дополнительный провод в середине каждой катушки, что позволит току проходить либо к одному концу катушки, либо другому. Эти два противоположных направления производят две полярности магнитного поля, фактически имитируя как положительные, так и отрицательные напряжения.
Хотя оба они имеют общий уровень питающих напряжений 5V, биполярный шаговый двигатель будет иметь больший крутящий момент, потому что ток течет через всю катушку, производя более сильное магнитное поле. С другой стороны, униполярные шаговые двигатели используют только половину длины катушки из-за дополнительного провода в середине катушки, а значит меньший крутящий момент доступен для удержания вала на месте.
Подключение шаговых двигателей
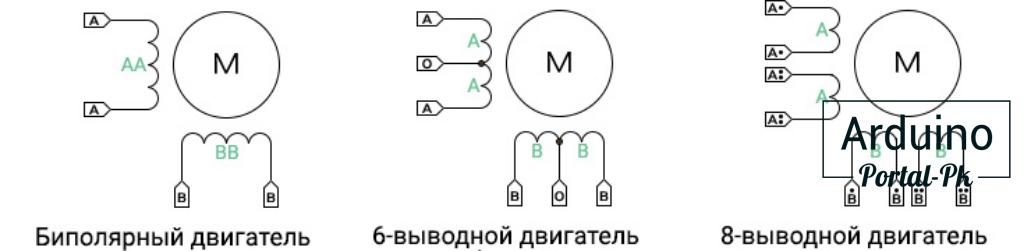
Разные шаговые двигатели могут иметь разное количество проводов, как правило, 4, 5, 6, или 8. 4-х проводные линии могут поддержать только биполярные шаговые двигатели, поскольку у них нет центрального провода.
5-ти и 6-ти проводные механизмы могут быть использованы как для однополярного, так и биполярного шагового двигателя, в зависимости от того, используется центральный провод на каждой из катушек или нет. 5-ти проводная конфигурация подразумевает, что центральные провода на два комплекта катушек соединены внутри между собой.
Способы управления шаговыми двигателями
Есть несколько различных способов управления шаговыми двигателями — полный шаг, полушаг, и микрошаговый. Каждый из этих стилей предлагают различные крутящие моменты, шаги и размеры.
Полный шаг — такой привод всегда имеет два электромагнита. Для вращения вала, один из электромагнитов выключается и далее электромагнит включен, вызывая вращение вала на 1/4 зуба (по крайней мере для гибридных шаговых двигателей). Этот стиль имеет самый сильный момент вращения, но и самый большой размер шага.
Полшага. Для вращения центрального вала, первый электромагнит находится под напряжением, как первый шаг, затем второй также под напряжением, а первый все еще работает на второй шаг. При третьем шаге выключается первый электромагнит и четвертый шаг — поворот на третий электромагнит, а второй электромагнит по-прежнему работает. Этот метод использует в два раза больше шагов, чем полный шаг, но он также имеет меньший крутящий момент.
Микрошаговый имеет наименьший размер шага из всех этих стилей. Момент вращения, связанный с этим стилем, зависит от того, как много тока, протекает через катушки в определенное время, но он всегда будет меньше, чем при полном шаге.
Схема подключения шаговых двигателей
Чтобы управлять шаговым двигателем необходим контроллер. Контроллер — схема, которая подает напряжение к любой из четырех катушек статора. Схемы управления достаточно сложны, по сравнению с обычными электромоторчиками, и имеют много особенностей. Подробно рассматривать тут мы их не будем, а просто приведём фрагмент популярного контроллера на ULN2003A.
В общем шаговые двигатели являются отличным способом для того, чтобы повернуть что-то в точный размер угла с большим количеством крутящего момента. Другое преимущество их в том, что скорость вращения может быть достигнута почти мгновенно при изменении направления вращения на противоположное.
В статье подробно рассказано о нескольких способах обновления BIOS на материнской плате Asus.
Теперь вы точно подберете идеальный ноутбук для работы или учебы!
Данная статья описывает преимущества SSD накопителей для приложений и игр. Также здесь выполняется сравнение между достоинств данного накопителя с устаревшим аналогом.
В статье речь идет о том, как отремонтировать пластмассовый китайский электрочайник.
Шаг 1.
От старого сканера:
- 1 шаговый двигатель
- 1 микросхема ULN2003
- 2 стальных прута
Для корпуса: — 1 картонная коробка
- Клеевой пистолет
- Кусачки
- Ножницы
- Принадлежности для пайки
- Краска
- 1 разъем DB-25 — провод
- 1 цилиндрическое гнездо для питания постоянного тока Для испытательного стенда
- 1 стержень с резьбой
- 1 подходящая под стержень гайка — разные шайбы и шурупы — куски древесины
Для управляющего компьютера:
- 1 старый компьютер (или ноутбук)
- 1 копия TurboCNC ( отсюда)
Шаг 2.
Берем детали от старого сканера. Чтобы построить собственный ЧПУ контроллер нужно для начала извлечь из сканера шаговый двигатель и плату управления. Здесь не приведено никаких фотографий, потому что каждый сканер выглядит по-своему, но обычно нужно просто снять стекло и вывернуть несколько винтов. Кроме двигателя и платы можно оставить еще металлические стержни, которые потребуются для тестирования шагового двигателя.
Шаг 3.
Извлекаем микросхему из платы управления Теперь нужно найти на плате управления шаговым двигателем микросхему ULN2003. Если вы не смогли обнаружить ее на своем устройстве, ULN2003 можно купить отдельно. Если она есть, ее нужно выпаять. Это потребует некоторого умения, но не так уж сложно. Сначала при помощи отсоса удалите как можно больше припоя. После этого осторожно просуньте под микросхему конец отвертки. Осторожно прикоснитесь концом паяльника к каждому выводу, продолжая при этом нажимать на отвертку.

Шаг 4.
Пайка Теперь нам нужно припаять микросхему на макетную плату. Припаяйте к плате все выводы микросхемы. На показанной здесь макетной плате имеется две шины электропитания, поэтому положительный вывод ULN2003 (смотрите схему здесь и на рисунке ниже) припаивается к одной из них, а отрицательный — к другой. Теперь, нужно соединить вывод 2 коннектора параллельного порта с выводом 1 ULN2003. Вывод 3 коннектора параллельного порта соединяется с выводом 2 ULN2003, вывод 4 — с выводом 3 ULN2003 и вывод 5 — с выводом 4 ULN2003. Теперь вывод 25 параллельного порта припаивается к отрицательной шине питания. Далее к управляющему устройству припаивается мотор. Делать это придется путем проб и ошибок. Можно просто припаять провода так, чтобы потом цеплять на них крокодилы. Еще можно использовать клеммы с винтовым креплением или что-нибудь подобное. Просто припаяйте провода к выводам 16, 15, 14 и 13 микросхемы ULN2003. Теперь припаяйте провод (желательно черный) к положительной шине питания. Управляющее устройство почти готово. Наконец, подсоедините к шинам электропитания на макетной плате цилиндрическое гнездо для питания постоянного тока. Чтобы провода не могли отломаться, их закрепляют клеем из пистолета.







Шаг 5.
Установка программного обеспечения Теперь о программном обеспечении. Единственная вещь, которая точно будет работать с вашим новым устройством — это Turbo CNC. Скачайте его здесь. Распакуйте архив и запишите на CD. Теперь, на компьютере, который вы собираетесь использовать для управления, перейдите на диск C:// и создайте в корне папку “tcnc”. Затем, скопируйте файлы с CD в новую папку. Закройте все окна. Вы только что установили Turbo CNC.





Шаг 6.
Настройка программного обеспечения Перезагрузите компьютер чтобы перейти к работе в MS-DOS. В командной строке наберите “C: cncTURBOCNC”. Иногда лучше использовать загрузочный диск, тогда копия TURBOCNC помещается на него и нужно набирать, соответственно “A: cncTURBOCNC”. Возникнет экран, похожий на изображенный на рис. 3. Нажмите пробел. Теперь вы находитесь в главном меню программы. Нажмите F1, и при помощи клавиш со стрелками выберите меню “Configure”. При помощи клавиш со стрелками выберите “number of axis”. Нажмите Enter. Введите количество осей, которые будут использоваться. Поскольку у нас только один мотор, выбираем “1”. Нажмите Enter чтобы продолжить. Снова нажмите F1 и в меню “Configure” выберите пункт “Configure axes”, затем дважды нажмите Enter.
Появится следующий экран. Нажимайте Tab пока не перейдете к ячейке “Drive Type”. При помощи стрелки вниз выберите пункт “Phase”. Снова при помощи Tab выберите ячейку “Scale”. Чтобы использовать калькулятор, нам нужно найти число шагов, которые двигатель делает за один оборот. Зная номер модели двигателя, можно установить на сколько градусов он поворачивается за один шаг. Чтобы найти число шагов, которые двигатель делает за один оборот, теперь нужно поделить 360 на число градусов за один шаг. Например, если мотор поворачивается за один шаг на 7,5 градусов, 360 поделить на 7,5 получится 48. Число, которое получится у вас, забейте в калькулятор шкалы (scale calculator).
Остальные настройки оставьте как есть. Нажмите OK, и скопируйте число в ячейке Scale в такую же ячейку на другом компьютере. В ячейке Acceleration установите значение 20, поскольку установленных по умолчанию 2000 слишком много для нашей системы. Начальную скорость установите равной 20, а максимальную — 175. Нажимайте Tab пока не дойдете до пункта “Last Phase”. Установите в нем значение 4. Нажимайте Tab пока не дойдете до первого ряда иксов.
Скопируйте следующее в четыре первых ячейки:
1000XXXXXXXX
0100XXXXXXXX
0010XXXXXXXX
0001XXXXXXXX
Остальные ячейки оставьте без изменений. Выберите OK. Теперь вы настроили программное обеспечение.









Шаг 7.
Строим тестовый вал Следующим этапом работы будет сборка простого вала для тестовой системы. Отрежьте 3 бруска дерева и скрепите их друг с другом. Чтобы получить ровные отверстия проведите на поверхности дерева ровную линию. Просверлите на линии два отверстия. Еще 1 отверстие просверлите посередине ниже первых двух. Отсоедините бруски. Через два отверстия, что находятся на одной линии, проденьте стальные пруты. Чтобы закрепить пруты воспользуйтесь небольшими шурупами. Проденьте пруты сквозь второй брусок. На последнем бруске закрепите двигатель. Не имеет значения, как вы это сделаете, будьте изобретательны.
Чтобы закрепить двигатель, имевшийся в наличии, использовали два отрезка стержня с резьбой 1/8. Брусок с прикрепленным двигателем надевается на свободный конец стальных прутов. Снова закрепите их шурупами. Сквозь третье отверстие на первом бруске проденьте стержень с резьбой. Заверните на стержне гайку. Проденьте стержень сквозь отверстие во втором бруске. Поворачивайте стержень до тех пор, пока он не пройдет сквозь все отверстия и не дойдет до вала двигателя. Соедините вал двигателя и стержень при помощи шланга и зажимов из проволоки. На втором бруске гайка удерживается при помощи дополнительных гаек и винтов. В завершение, отрежьте брусок дерева для подставки. Привинтите ее шурупами ко второму бруску. Проверьте, установлена ли подставка ровно на поверхности. Регулировать положение подставки на поверхности можно при помощи дополнительных винтов и гаек. Так делается вал для тестовой системы.









Шаг 8.
Подсоединяем и тестируем двигатель Теперь нужно соединить двигатель с контроллером. Во-первых, соедините общий провод (смотрите документацию к двигателю) с проводом, который был припаян к положительной шине питания. Другие четыре провода соединяются путем проб и ошибок. Соедините их все, и затем меняйте порядок соединения, если ваш двигатель делает два шага вперед и один назад или что-либо подобное. Для проведения тестирования подключите 12 В 350 мА источник питания постоянного тока в цилиндрическое гнездо. Затем соедините разъем DB25 c компьютером. В TurboCNC проверьте как соединен двигатель. В результате тестирования и проверки правильного подсоединения двигателя у вас должен получиться полностью работоспособный вал. Чтобы проверить масштабирование вашего устройства, прикрепите к нему маркер и запустите тестовую программу. Измерьте получившуюся линию. Если длина линии составляет порядка 2-3 см, устройство работает правильно. В противном случае, проверьте вычисления в шаге 6. Если у вас все получилось, поздравляем, самое трудное уже позади.


Шаг 9.
Изготовление корпуса
Часть 1
Изготовление корпуса — это завершительный этап. Присоединимся к защитникам природы и сделаем его из вторсырья. Тем более, что контроллер у нас тоже не с магазинных полок. У представленного вашему вниманию образца плата имеет размер 5 на 7,5 см, поэтому корпус будет размером 7,5 на 10 на 5 см, чтобы оставить достаточно места для проводов. Из картонной коробки вырезаем стенки. Вырезаем 2 прямоугольника размером 7,5 на 10 см, еще 2 размером 5 на 10 см и еще 2 размером 7,5 на 5 см (см. рисунки). В них нужно вырезать отверстия для разъемов. Обведите контуры разъема параллельного порта на одной из 5 х 10 стенок. На этой же стенке обведите контуры цилиндрического гнезда для питания постоянного тока. Вырежьте по контурам оба отверстия. То, что вы будете делать дальше, зависит от того, припаивали ли вы к проводам двигателя разъемы. Если да, то закрепите их снаружи второй пока пустой стенки размером 5 х 10. Если нет, проткните в стенке 5 отверстий для проводов. При помощи клеевого пистолета соедините все стенки вместе (кроме верхней, см. рисунки). Корпус можно покрасить.













Шаг 10.
Изготовление корпуса
Часть 2
Теперь нужно приклеить все компоненты внутрь корпуса. Убедитесь, что на разъемы попало достаточно много клея, потому что они будут подвергаться большим нагрузкам. Чтобы коробка оставалась закрытой, нужно сделать защелки. Из пенопласта вырежьте пару ушек. Затем вырежьте пару полос и четыре небольших квадратика. Приклейте по два квадратика к каждой из полос как показано на рисунке. Приклейте ушки по обеим сторонам корпуса. Сверху коробки приклейте полосы. Этим завершается изготовление корпуса.

Шаг 11.
Возможные применения и заключение Этот контроллер можно применять как: — ЧПУ устройство — плоттер — или любую другую вещь, которой нужно точное управление движением. — добавление- Здесь приведены схема и инструкции по изготовлению контроллера с тремя осями. Чтобы настроить программное обеспечение, следуйте вышеуказанным шагам, но в поле “number of axis” введите 3.
Для настройки первой оси делайте все как было сказано выше, для второй оси тоже, но в строках первых четырех фаз введите следующее:
“XXXX1000XXXX
XXXX0100XXXX
XXXX0010XXXX
XXXX0001XXXX”
Для третьей оси в строках первых четырех фаз введите:
“XXXXXXXX1000
XXXXXXXX0100
XXXXXXXX0010
XXXXXXXX0001″


Перевод: Piyavka, по заказу РадиоЛоцман
| Фрагменты обсуждения (только последние 20 сообщений): | Полный вариант обсуждения » |
- Из серии “станок с ЧПУ своими руками”. В принципе информация уже известная, только ПО используется древнее (для экспериментов конечно же подойдет). И на фотке микросхема TD62803 (вроде как аналог).
- програмное обеспеч работает под мс-дос а может етот контролер работать под виндовс хр.
- Если ОС даст общаться напрямую с LPT-портом, то возможно попробовать запустить эту прогу под Windows (c командной строки).
- Понимаю, конечно, что хочется попробовать ШД. Сам несколько лет назад не знал, как подойти к нему. Но желание попробовать — означает применить где-то. Лучше всего для первых опытов подойдёт: ПО- MACH-2 Контроллер на L297 + 4 полевика IRF640 к примеру. ( желательно с драйверами). На входе вашей волшебной конструкции обязательно 2 оптрона. Замкнёшь много не сгорит.Компьютер уцелеет точно. И в добрый путь.
- я спаял контроллер на unl2003 как его теперь проверить перед подключением к компу..
- а без оптронов не как
- Можно, но только для первых опытов. А проверить просто.Возьми и включи заместо обмоток лампочки накаливания. И всё увидишь на медленной скорости.
- ето в место оптронов поставить лампочки.
- До оптронов ещё как до Луны. Вместо обмоток — Лампочки.
- а у вас нет простинькой схемы контролера.
- По-моему это и есть самая простая схема, куда еще проще, тем более, что Вы ее уже собрали. Осталось проверить, по этому драйверу ULN2003 много информации
- схема работает но только 2 двигателя. на 3 двигатели который подключен к 1,14,16,17. неработает 1 вход почему .и немогу разобратся в програме turbo cnc.есть ли такая только на руском языке.
- Драйвер ULN2003, подключенный к этим выходам, исправен? настройку сделали как в сатье описано?
- помогите разобратся с програмой turbo cnc.а нет ли другой програмы на руском для контроллера на uln2003.
- Вот здесь есть и программа под Win и много полезной информации касаемо шаговых двигателей
- делаю второй контролер на 555тм7 и uln2004 .но есть одна проблема по схеме стоит uln2004 а возможна ли замена на uln2003.если возможна то в чем их разница.
- Микросхемы взаимозаменяемы, единственное отличие: ULN2003 может управляться ТТЛ и КМОП сигналами, а ULN2004 — только КМОП (6-15 В). По-моему так, если память не изменяет мне. А лучше скачать на них даташит и сравнить.
- Здравствуйте ! Помогите, кто может! Как управлять одним компьютером или контролером одновременно сотней шаговых двигателей?
- не слишком ли много шаговых двигателей на один “мозг”. Как вариант — использовать расширитель портов для микроконтроллера и драйверы шаговых двигателей, или специальные драйверы шаговых двигателей с последовательным интерфейсом и адресацией.
- А можно ли подключить шаговый двигатель к указаннои схеме если у него не 5 а 4 выхода (M49SP-2NK) И ЕСЛИ ДА ТО КАК
| Полный вариант обсуждения » |
| Рекомендуемые публикации по теме: | |
При перепечатке материалов с сайта прямая ссылка на РадиоЛоцман обязательна.
Приглашаем авторов статей и переводов к публикации материалов на страницах сайта.

КАК ПОДКЛЮЧИТЬ ШАГОВЫЙ ДВИГАТЕЛЬ
Как подключить шаговый двигатель с 4, 5, 6 и 8 выводами к драйверу.
В предыдущих статьях мы рассматривали процесс выбора шагового электродвигателя (см. статью«Как выбрать шаговый двигатель») в зависимости от способа его применения. В данной статье мы подробно рассмотрим как подключить шаговый двигатель.
Шаговые электродвигатели могут поставляться с несколькими вариантами схем подключения. Выбор схемы будет определяться типом двигателя. Большинство наиболее распространенных шаговых двигателей имеют схемы, предполагающие использование 4-х, 5-ти, 6-ти или 8-ми проводов.
КАК ПОДКЛЮЧИТЬ ШАГОВЫЙ ДВИГАТЕЛЬ С 4 ВЫВОДАМИ
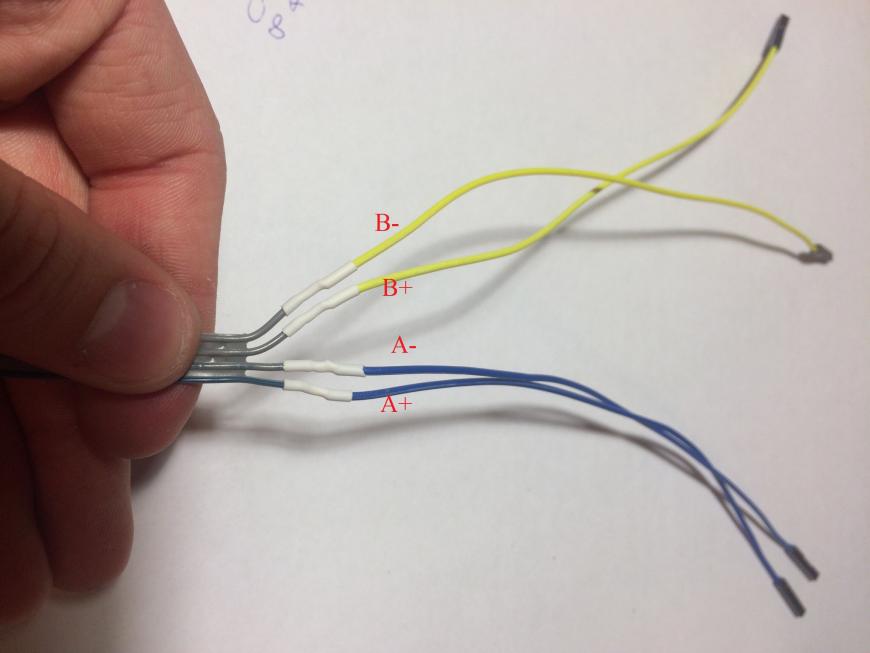
Если в вашем распоряжении имеется шаговый двигатель, подключаемый при помощи только четырех проводов, это означает, что в нем две обмотки, это биполярный мотор и вы сможете использовать его только с биполярным драйвером. Обратите внимание на то, что каждая из фазных обмоток содержит пару проводов — для идентификации каждого провода используйте тестер (мультиметр).
Найдите замкнутые между собой провода(которые прозваниваются) и подключите их к шаговому двигателю. Лучше сразу свяжите их вместе, чтобы не повторять операцию постоянно
КАК ПОДКЛЮЧИТЬ УНИПОЛЯРНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ С 6 ВЫВОДАМИ
Для того, чтобы подключить шаговый двигатель с 6 выводами, с помощью тестера разделите все провода на три группы, замкнутые между собой, а затем найдите центральные выводы, измеряя сопротивление между проводами. Если вы хотите подключить ваш электродвигатель к униполярному драйверу, используйте все шесть проводов.
Подключение к биполярному драйверу(коих подавляющее большинство) потребует от вас использования только одного конца провода с одним выводом и одного центрального вывода для подключения к каждой обмотке.
Кроме того, определить обмотки можно только методом проб и ошибок; лучше всего попытаться найти центральный вывод, так как его сопротивление составляет половину от сопротивления других проводов.
morflot.su
Переделка шагового двигателя из униполярного в биполярный
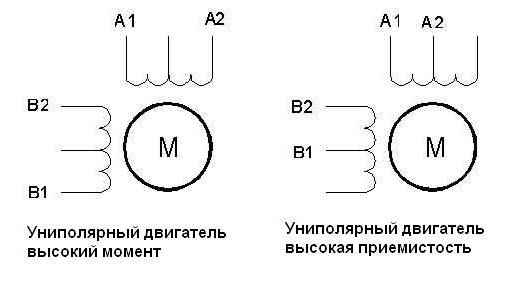
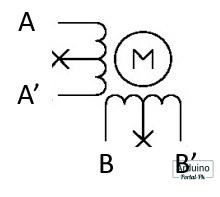
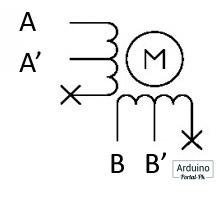
С каждым годом аддитивные технологии развиваются все стремительней и входят в массы, и от этого , естественно, 3D печать становится только доступней. Но не для всех, и поэтому самые очумелые ручки решаются на собственное принтеростроение из всего что только попадется под руки. Одной из главных загвоздок такого принтеростроения становятся шаговые двигатели. Легче всего их достать из старых МФУ принтеров. Но зачастую двигатели из них являются униполярными и совсем не подходят для драйверов типа А4988 и drv8825. Сам столкнулся с такой проблемой, много читал про переделку в биполярный шаговый двигатель и теперь хочу поделиться с вами:)Вот схема соединения катушек униполярного и биполярного шаговых двигателей:
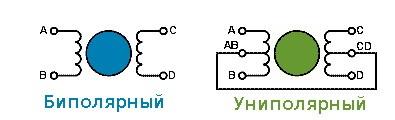 Как видно, разница в том, что у униполярного шаговика середины обмоток соединены.
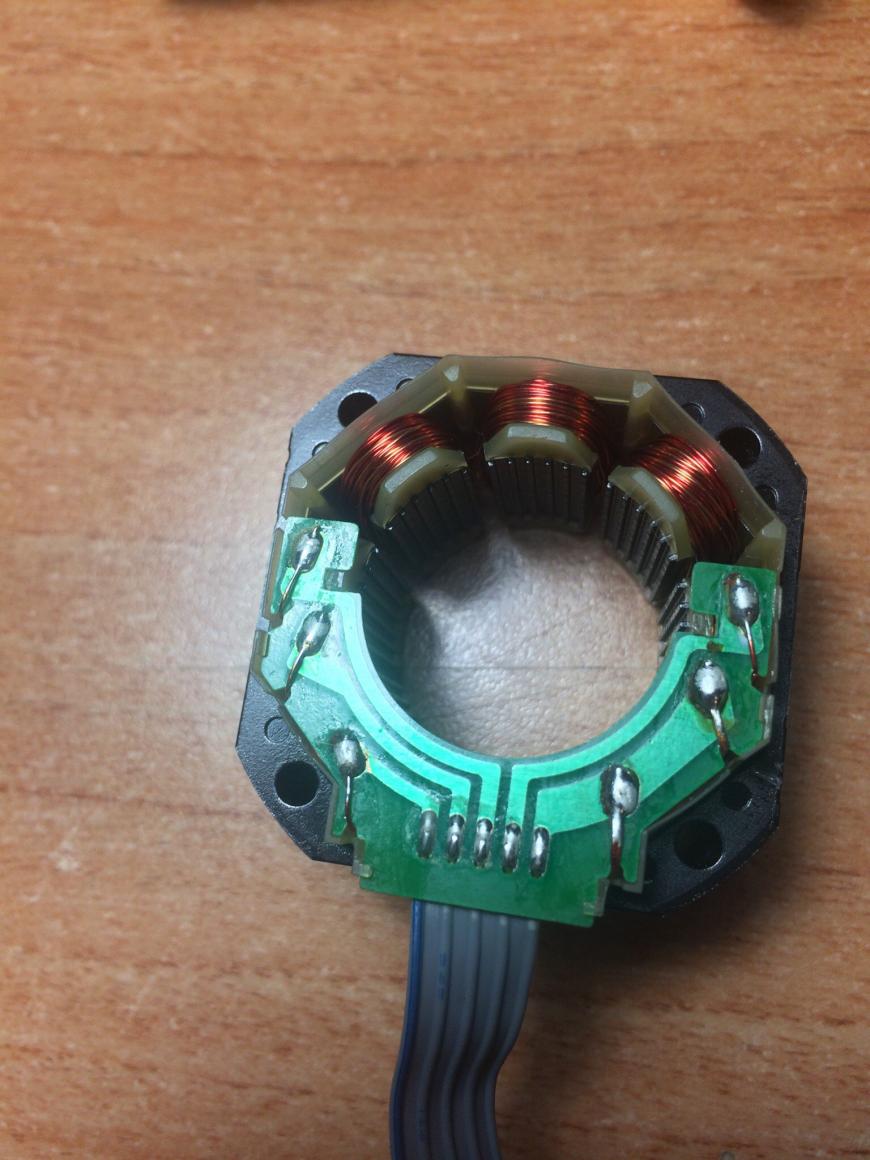
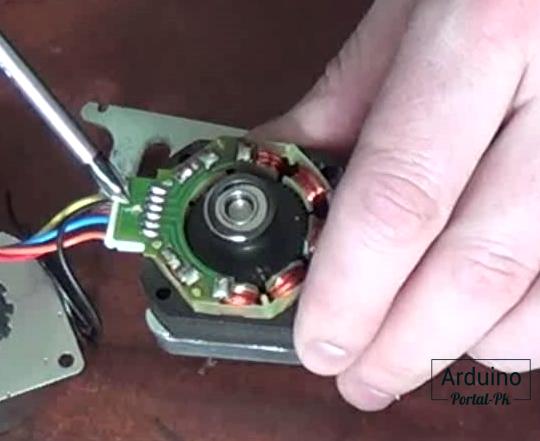
Как видно, разница в том, что у униполярного шаговика середины обмоток соединены.У самого были вот такие шаговики:

Для разборки откручиваем 4 болта и снимаем заднюю крышку. Вот что мы должны увидеть:
 Первым логичным решением кажется просто перерезать пятую слева дорожку, но в большинстве случаев это не возымеет какого-либо эффекта. Если внимательно приглядеться, то заметно, что к пяточкам первых четырех дорожек припаяно по одному проводу, а к пятой уже по два . Отпаиваем их. Дальше все выводы мысленно нумеруем :
Первым логичным решением кажется просто перерезать пятую слева дорожку, но в большинстве случаев это не возымеет какого-либо эффекта. Если внимательно приглядеться, то заметно, что к пяточкам первых четырех дорожек припаяно по одному проводу, а к пятой уже по два . Отпаиваем их. Дальше все выводы мысленно нумеруем : И начинаем прозванивать выводы мультиметром. У меня получилось так : 1-8, 2-5, 3-6 и 4-7. Мы нашли четыре необходимых нам обмотки. Осталось определиться с их соединением. Возможно параллельное соединение обмоток, тогда бы мы соединили 1 с 2 выводом, 8 с 5, 3 с 4 и 6 с 7 соответственно, при данном подключении достигается максимальная скорость вращения. Также возможно последовательное соединение, тогда необходимо соединить 8 с 5 выводом и 6 с 7, при данном подключении получаем максимальный вращающий момент, что важно, например, для экструдеров. Ниже привожу схемы:
И начинаем прозванивать выводы мультиметром. У меня получилось так : 1-8, 2-5, 3-6 и 4-7. Мы нашли четыре необходимых нам обмотки. Осталось определиться с их соединением. Возможно параллельное соединение обмоток, тогда бы мы соединили 1 с 2 выводом, 8 с 5, 3 с 4 и 6 с 7 соответственно, при данном подключении достигается максимальная скорость вращения. Также возможно последовательное соединение, тогда необходимо соединить 8 с 5 выводом и 6 с 7, при данном подключении получаем максимальный вращающий момент, что важно, например, для экструдеров. Ниже привожу схемы: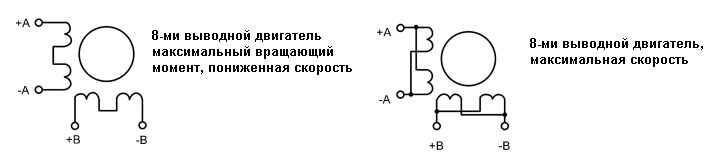 Схему соединения необходимо выбирать в зависимости от конкретных целей и удобства соединения. Конкретно в нашем случае удобней выбрать схему с последовательным соединением, так как выводы 6 и 7 и так находятся рядом, и необходима будет лишь одна перемычка между 5 и 8 выводом и никакой больше мишуры из проводов. Разрезаем пятую дорожку на 3 части, и спаиваем все согласно схеме. Вот что получилось у меня:
Схему соединения необходимо выбирать в зависимости от конкретных целей и удобства соединения. Конкретно в нашем случае удобней выбрать схему с последовательным соединением, так как выводы 6 и 7 и так находятся рядом, и необходима будет лишь одна перемычка между 5 и 8 выводом и никакой больше мишуры из проводов. Разрезаем пятую дорожку на 3 части, и спаиваем все согласно схеме. Вот что получилось у меня: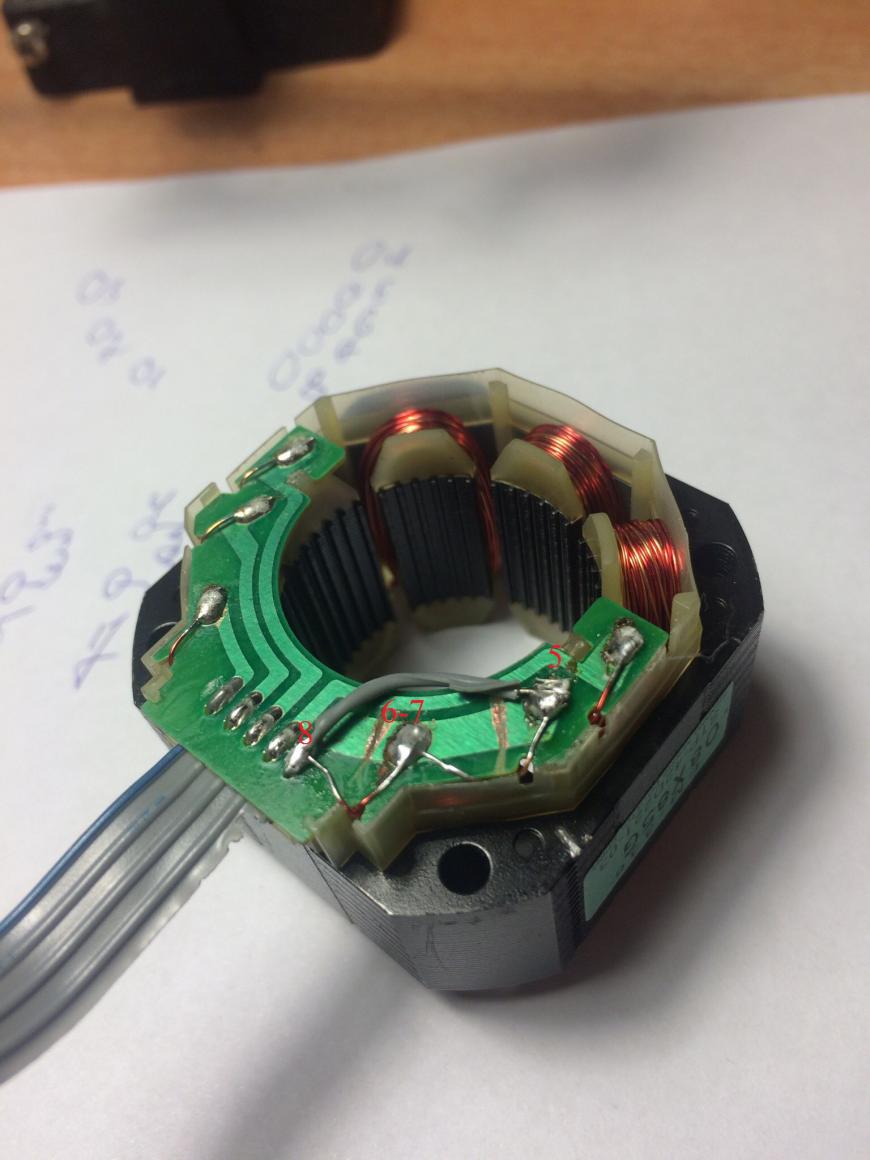
 Подсоединяем к плате управления и наслаждаемся работой!) Вот и все, процесс совсем несложный и занимает совсем немного времени.
Подсоединяем к плате управления и наслаждаемся работой!) Вот и все, процесс совсем несложный и занимает совсем немного времени.Всем спасибо за внимание и хороших будней!))
3dtoday.ru
Как правильно подключить шаговый двигатель. — Мегаобучалка
Очень часто возникает необходимость подключить шаговый двигатель к устройству управления(контроллеру) без возможности проверки обмоток прибором, омметром, мультиметром.
Не расстраивайтесь, используя обратимость шагового двигателя, т.е. его «генераторную» функцию, мы легко можем найти выводы обмоток и правильно подключить к устройству.
Для того чтобы найти выводы обмоток 4-х выводного двигателя, необходимо найти такую пару выводов, при замыкании которых вал шагового двигателя будет вращаться рукой с усилием. Происходит это потому, что двигатель при вращении вала рукой работает как генератор и замыкание выводов обмотки является подключением нагрузки на эту обмотку. Вторая пара выводов будет работать точно так же, при замыкании проводов вал двигателя вращается с трудом.
Это и есть две обмотки шагового двигателя.
Раз мы нашли пары выводов обмоток, можем их подключить. Допустим, на разъеме мы определили, что выводами одной обмотки являются красный и черный провода, выводами другой – белый и желтый.
Если они включены в разъем так как показано на рисунке, то двигатель можно смело подключать к большинству устройств, т.к. стандартом принято размещение на разъемах выводов обмоток как А1-А2-В1- В2, или В1-В2-А1-А2 где А1 и А2 выводы одной обмотки, а В1 и В2 – выводы другой обмотки(на фото)
Если же выводы обмоток перепутаны, например, чередуются как А1-В1-А2-В2,то можно либо перепаять провода, но лучше просто вынув среднюю пару контактов из разъема, воткнуть их в нужные гнезда. Устройство разъема позволяет делать это многократно.
Нажав сверху отверткой или иглой на зуб-фиксатор вынимаем провод вместе с контактом из корпуса разъема, затем лезвием ножа слегка поднимаем зуб-фиксатор(как показано на фото) и вставляем его в нужное гнездо .
После этого снова проверяем обмотки, закорачивая выводы разъема отрезком провода, и если обмотки размещены правильно – подключаем шаговый двигатель к устройству, не забывая убрать «закоротку».
Не стоит волноваться за неправильную полярность, в большинстве случаев направление вращения двигателя можно изменить из программы, а если необходимо поменять направление вращения двигателя без вмешательства в программу или там где это невозможно, меняем выводы одной обмотки местами, например, меняем черный с красным или желтый с белым.
Разъемы типа DUPONT можно просто перевернуть «задом наперед» , тогда направление вращения двигателя тоже поменяется.
На фото разъем типа DUPONT
Настройка двигателей без приборов.
Первое – настройку надо всегда начинать с минимальных токов двигателя.
Ориентировочно определить ток можно по шуму двигателя, чем ток больше, тем сильнее шумит двигатель. Также можно определить по усилию, нообходимому для поворота вала вручную, чем больше ток, тем сильнее двигатель. Также можно определить ток по нагреву драйвера или самого двигателя. Чем сильнее греется то и (или) другое, тем больше ток.
Оптимальным считается такой ток, когда устройство не имеет пропусков шагов, двигатель не останавливается где хочет, легко преодолеваются небольшие тормозящие усилия на валу, двигатель не шумит, двигатель и драйвер нагреваются не более чем до 40-50 градусов (мизинец терпит такую темппературу). Все вышеуказанное должно соблюдаться даже в процессе длительной работы.
Слишком большой ток может являться причиной лишнего дергания привода, стуков, шума и писка двигателей и резонансного шума всей механики.
megaobuchalka.ru
Как работают шаговые двигатели | РОБОТОША
Использование шаговых двигателей является одним из самых простых, дешевых и легких решений для реализации систем точного позиционирования. Эти двигатели очень часто используются в различных станках ЧПУ и роботах. Сегодня я расскажу о том, как устроены шаговые двигатели и как они работают.
Что такое шаговый двигатель?
Прежде всего, шаговый двигатель — это двигатель. Это означает, что он преобразует электрическую энергию в механическую. Основное отличие между ним и всеми остальными типами двигателей состоит в способе, благодаря которому происходит вращение. В отличие от других моторов, шаговые двигатели вращаются НЕ непрерывно! Вместо этого, они вращаются шагами (отсюда и их название). Каждый шаг представляет собой часть полного оборота. Эта часть зависит, в основном, от механического устройства мотора и от выбранного способа управления им. Шаговые двигатели также различаются способами питания. В отличие от двигателей переменного или постоянного тока, обычно они управляются импульсами. Каждый импульс преобразуется в градус, на который происходит вращение. Например, 1.8º шаговый двигатель, поворачивает свой вал на 1.8° при каждом поступающем импульсе. Часто, из-за этой характеристики, шаговые двигатели еще называют цифровыми.
Основы работы шагового двигателя
Как и все моторы, шаговые двигатели состоят из статора и ротора. На роторе установлены постоянные магниты, а в состав статора входят катушки (обмотки). Шаговый двигатель, в общем случае, выглядит следующим образом:
Здесь мы видим 4 обмотки, расположенные под углом 90° по-отношению друг к другу, размещенные на статоре. Различия в способах подключения обмоток в конечном счете определяют тип подключения шагового двигателя. На рисунке выше, обмотки не соединяются вместе. Мотор по такой схеме имеет шаг поворота равный 90°. Обмотки задействуются по кругу — одна за другой. Направление вращения вала определяется порядком, в котором задействуются обмотки. Ниже показана работа такого мотора. Ток через обмотки протекает с интервалом в 1 секунду. Вал двигателя поворачивается на 90° каждый раз, когда через катушку протекает ток.
Режимы управления
Теперь рассмотрим различные способы подачи тока на обмотки и увидим, как в результате вращается вал мотора.
Волновое управление или полношаговое управление одной обмоткой
Этот способ описан выше и называется волновым управлением одной обмоткой. Это означает, что только через одну обмотку протекает электрический ток. Этот способ используется редко. В основном, к нему прибегают в целях снижения энергопотребления. Такой метод позволяет получить менее половины вращающего момента мотора, следовательно, нагрузка мотора не может быть значительной.
У такого мотора будет 4 шага на оборот, что является номинальным числом шагов.
Полношаговый режим управления
Вторым, и наиболее часто используемым методом, является полношаговый метод. Для реализации этого способа, напряжение на обмотки подается попарно. В зависимости от способа подключения обмоток (последовательно или параллельно), мотору потребуется двойное напряжение или двойной ток для работы по отношению к необходимым при возбуждении одной обмотки. В этом случае мотор будет выдавать 100% номинального вращающего момента.
Такой мотор имеет 4 шага на полный оборот, что и является номинальным числом шагов для него.
Полушаговый режим
Это очень интересный способ получить удвоенную точность системы позиционирования, не меняя при этом ничего в «железе»! Для реализации этого метода, все пары обмоток могут запитываться одновременно, в результате чего, ротор повернется на половину своего нормального шага. Этот метод может быть также реализован с использованием одной или двух обмоток. Ниже показано, как это работает.
Однообмоточный режим
Двухобмоточный режим
Используя этот метод, тот же самый мотор сможет дать удвоенное число шагов на оборот, что означает двойную точность для системы позиционирования. Например, этот мотор даст 8 шагов на оборот!
Режим микрошага
Микрошаговый режим наиболее часто применяемый способ управления шаговыми двигателями на сегодняшний день. Идея микрошага состоит в подаче на обмотки мотора питания не импульсами, а сигнала, по своей форме, напоминающего синусоиду. Такой способ изменения положения при переходе от одного шага к другому позволяет получить более гладкое перемещение, делая шаговые моторы широко используемыми в таких приложениях как системы позиционирования в станках с ЧПУ. Кроме этого, рывки различных деталей, подключенных к мотору, также как и толчки самого мотора значительно снижаются. В режиме микрошага, шаговый мотор может вращаться также плавно как и обычные двигатели постоянного тока.
Форма тока, протекающего через обмотку похожа на синусоиду. Также могут использоваться формы цифровых сигналов. Вот некоторые примеры:
Метод микрошага является в действительности способом питания мотора, а не методом управления обмотками. Следовательно, микрошаг можно использовать и при волновом управлении и в полношаговом режиме управления. Ниже продемонстрирована работа этого метода:
Хотя кажется, что в режиме микрошага шаги становятся больше, но, на самом деле, этого не происходит. Для повышения точности часто используются трапецевидные шестерни. Этот метод используется для обеспечения плавного движения.
Типы шаговых двигателей
Шаговый двигатель с постоянным магнитом
Ротор такого мотора несет постоянный магнит в форме диска с двумя или большим количеством полюсов. Работает точно также как описано выше. Обмотки статора будут притягивать или отталкивать постоянный магнит на роторе и создавать тем самым крутящий момент. Ниже представлена схема шагового двигателя с постоянным магнитом.
Обычно, величина шага таких двигателей лежит в диапазоне 45-90°.
Шаговый двигатель с переменным магнитным сопротивлением
У двигателей этого типа на роторе нет постоянного магнита. Вместо этого, ротор изготавливается из магнитомягкого металла в виде зубчатого диска, типа шестеренки. Статор имеет более четырех обмоток. Обмотки запитываются в противоположных парах и притягивают ротор. Отсутствие постоянного магнита отрицательно влияет на величину крутящего момента, он значительно снижается. Но есть и большой плюс. У этих двигателей нет стопорящего момента. Стопорящий момент — это вращающий момент, создаваемый постоянными магнитами ротора, которые притягиваются к арматуре статора при отсутствии тока в обмотках. Можно легко понять, что это за момент, если попытаться повернуть рукой отключенный шаговый двигатель с постоянным магнитом. Вы почувствуете различимые щелчки на каждом шаге двигателя. В действительности то, что вы ощутите и будет фиксирующим моментом, который притягивает магниты к арматуре статора. Ниже показана работа шагового двигателя с переменным магнитным сопротивлением.
Шаговые двигатели с переменным магнитным сопротивлением обычно имеют шаг, лежащий в диапазоне 5-15°.
Гибридный шаговый двигатель
Данный тип шаговых моторов получил название «гибридный» из-за того, что сочетает в себе характеристики шаговых двигателей и с постоянными магнитами и с переменным магнитным сопротивлением. Они обладают отличными удерживающим и динамическим крутящим моментами, а также очень маленькую величину шага, лежащую в пределах 0.9-5°, обеспечивая великолепную точность. Их механические части могут вращаться с большими скоростями, чем другие типы шаговых моторов. Этот тип двигателей используется в станках ЧПУ high-end класса и в роботах. Главный их недостаток — высокая стоимость.
Обычный мотор с 200 шагами на оборот будет иметь 50 положительных и 50 отрицательных полюсов с 8-ю обмотками (4-мя парами). Из-за того, что такой магнит нельзя произвести, было найдено элегантное решение. Берется два отдельных 50-зубых диска. Также используется цилиндрический постоянный магнит. Диски привариваются один с положительному, другой к отрицательному полюсам постоянного магнита. Таким образом, один диск имеет положительный полюс на своих зубьях, другой — отрицательный.
Два 50-зубых диска помещены сверху и снизу постоянного магнита
Фокус в том, что диски размещаются таким образом, что если посмотреть на них сверху, то они выглядят как один 100-зубый диск! Возвышения на одном диске совмещаются со впадинами на другом.
Впадины на одном диске выровнены с возвышениями на другом
Ниже показана работа гибридного шагового двигателя, имеющего 75 шагов на оборот (1.5° на шаг). Стоит заметить, что 6 обмоток спарены, каждая имеет обмотку с противоположной стороны. Вы наверняка ожидали, что катушки расположены под углом в 60° следом друг за другом, но, на самом деле, это не так. Если предположить, что первая пара — это самая верхняя и самая нижняя катушки, тогда вторая пара смещена под углом 60+5° по отношению к первой, и третья смещена на 60+5° по отношению ко второй. Угловая разница и является причиной вращения мотора. Режимы управления с полным и половинным шагом могут использоваться, впрочем как и волновое управление для снижения энергопотребления. Ниже продемонстрировано полношаговое управление. В полушаговом режиме, число шагов увеличится до 150!
Не пытайтесь следовать за обмотками, чтобы понаблюдать, как это работает. Просто сфокусируйтесь на одной обмотке и ждите. Вы заметите, что всякий раз, когда обмотка задействована, есть 3 положительных полюса (красный) в 5° позади, которые притягиваются по направлению вращения и другие 3 отрицательных полюса (синий) в 5° впереди, которые толкаются в направлении вращения. Задействованная обмотка всегда находится между положительным и отрицательным полюсами.
Подключение обмоток
Шаговые двигатели относятся к многофазным моторам. Больше обмоток, значит, больше фаз. Больше фаз, более гладкая работа мотора и более выокая стоимость. Крутящий момент не связан с числом фаз. Наибольшее распространение получили двухфазные двигатели. Это минимальное количество необходимых для того, чтобы шаговый мотор функционировал. Здесь необходимо понять, что число фаз не обязательно определяет число обмоток. Например, если каждая фаза имеет 2 пары обмоток и мотор является двухфазным, то количество обмоток будет равно 8. Это определяет только механические характеристики мотора. Для упрощения, я рассмотрю простейший двухфазный двигатель с одной парой обмоток на фазу.
Существует три различных типа подключения для двухфазных шаговых двигателей. Обмотки соединяются между собой, и, в зависимости от подключения, используется различное число проводов для подключения мотора к контроллеру.
Биполярный двигатель
Это наиболее простая конфигурация. Используются 4 провода для подключения мотора к контроллеру. Обмотки соединяются внутри последовательно или параллельно. Пример биполярного двигателя:
Мотор имеет 4 клеммы. Два желтых терминала (цвета не соответствуют стандартным!) питают вертикальную обмотку, два розовых — горизонтальную обмотку. Проблема такой конфигурации состоит в том, что если кто-то захочет изменить магнитную полярность, то единственным способом будет изменение направления электрического тока. Это означает, что схема драйвера усложнится, например это будет H-мост.
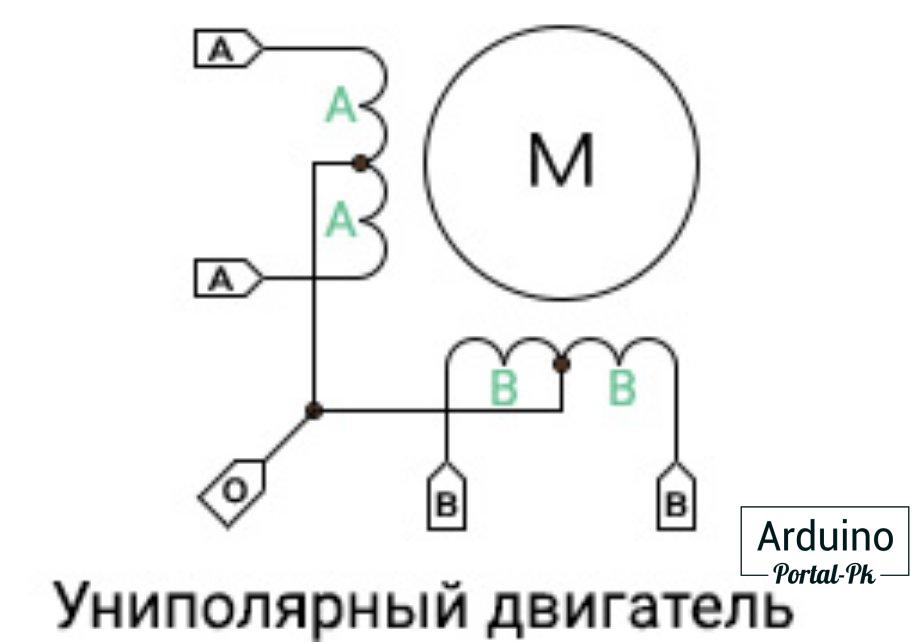
Униполярный двигатель
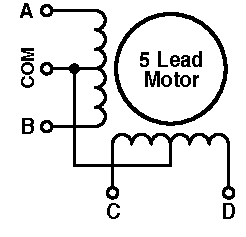
В униполярном двигателе общий провод подключен к точке, где две обмотки соединены вместе:
Используя этот общий провод, можно легко изменить магнитные полюса. Предположим, например, что мы подключили общий провод к земле. Запитав сначала один вывод обмотки, а затем другой — мы изменяем магнитные полюса. Это означает, что схема для использования биполярного двигателя очень простая, как правило, состоит только из двух транзисторов на фазу. Основным недостатком является то, что каждый раз, используется только половина доступных катушечных обмоток. Это как при волновом управлении двигателем с возбуждением одной обмотки. Таким образом, крутящий момент всегда составляет около половины крутящего момента, который мог быть получен, если бы обе катушки были задействованы. Другими словами, униполярные электродвигатели должны быть в два раза более габаритными, по сравнению с биполярным двигателем, чтобы обеспечить такой же крутящий момент. Однополярный двигатель может использоваться как биполярный двигатель. Для этого нужно оставить общий провод неподключенным.
Униполярные двигатели могут иметь 5 или 6 выводов для подключения. На рисунке выше продемонстрирован униполярный мотор с 6 выводами. Существуют двигатели, в которых два общих провода соединены внутри. В этом случае, мотор имеет 5 клемм для подключения.
8-выводной шаговый двигатель
Это наиболее гибкий шаговый мотор в плане подключения. Все обмотки имеют выводы с двух сторон:
Этот двигатель может быть подключен любым из возможных способов. Он может быть подключен как:
- 5 или 6-выводной униполярный,
- биполярный с последовательно соединенными обмотками,
- биполярный с параллельно соединенными обмотками,
- биполярный с одним подключением на фазу для приложений с малым потреблением тока
Еще по этой теме
Вы можете пропустить чтение записи и оставить комментарий. Размещение ссылок запрещено.
robotosha.ru
Как подобрать шаговый двигатель для станка ЧПУ. ШД из принтера.
Любая разработка начинается с выбора компонентов. При разработке ЧПУ станка очень важно правильно подобрать шаговые двигателя . Если у вас есть деньги на покупку новых двигателей, в таком случае нужно определить рабочее напряжения и мощность двигателя. Я купил себе для второго ЧПУ станка шаговые двигателя вот такие: Nema17 1.7 А.
Если у вас нет достаточно денег или вы просто пробуете свои силы в данной сфере. То вы скорее всего будите использовать двигателя из принтеров . Это самый недорогой вариант. Но тут Вы столкнетесь с рядом проблем. У двигателя может быть 4, 5, 6, 8 — проводов для подключения. Как их подключить к драйверам L298n и СNC shield.
Давайте разберемся по порядку. Какие шаговые двигателя бывают. Если вы видите четное количество выводов это биполярный шаговый двигатель . Расположение обмотки для данного двигателя вот такое.
Если
у двигателя
5 выводов, это
униполярный шаговый
двигатель
. Вот так выгладит
его схема.
Наши драйвера рассчитаны на двигателя с 4 выводами
Биполярные
ШД с 6-ю выводами подключаются к драйверу
двумя способами:
В
данном случае ШД имеет момент в 1.4 раза
больше. Момент более стабилен на низких
частотах.
При
таком типе подключения нужно уменьшить
ток, подаваемый на обмотки двигателя
в √2 раз. Например, если номинальный
рабочий ток двигателя составляет 2 А,
то при последовательном включении
обмоток требуемый ток – 1.4 А, то есть в
1.4 раза меньше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R – именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
Потребляемая мощность ШД — I*2 * R
При последовательном включении обмоток потребляемая мощность становится Iпосл.*2 * 2 * R
Потребляемая мощность не зависит от типа подключения, поэтому I*2 * R = Iпосл.*2 * 2* R, откуда
Iпосл.= I/ √2, т.е.
Iпосл.= 0.707 *I.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением ток, пропускаемого через обмотки. Но так как ток уменьшился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Tпосл. = 1.4 * T.
Во втором случае момент более стабилен на высоких частотах. Параметры ШД при таком подключении соответствуют заявленным в datasheet, (момент, ток), момент более стабилен на высоких частотах .
Униполярный шаговый двигатель можно переделать.
Для этого нужно разобрать шаговый
двигатель и перерезать провод соединяющий
центр обмоток. И при подключении общий
провод подключать ни куда не нужно.

В итоге у нас получается биполярный двигатель с 4 выводами.
Шаговые
двигателя с 8-ю выводами можно подключить
тремя способами.

Подключение А – шаговик работает с характеристиками, заявленными в описании (момент, ток), момент более стабилен на высоких частотах.
Подключение B – момент ↑1.4 раза, момент более стабилен на низких частотах (относительно А).
Подключение C – момент ↑1.96 раза, момент более стабилен на высоких частотах (относительно А).
Вот мы и решили проблему подключения шаговых двигателей. Но не все двигателя у нас заработают. Нужно еще определить рабочее напряжение двигателей. Самый правильный способ это найти datasheet. Так все параметры есть. Но не ко все двигателя из принтера можно найти datasheet. В таких случаях я пользуюсь вот такой таблицой.
|
Сопротивление обмотки, Ом |
Рабочее напряжение, В |
|
5-15 |
5 |
|
30-60 |
12 |
|
60-120 |
24 |
Не знаю на сколько данная таблица верная но у меня все сходиться и работает как надо.
Двигателя я выбираю чтобы рабочее напряжение было меньше или равно напряжению источника питания. Для двигателей рассчитанных на меньшее напряжения необходимо настроить ток ниже.
Настраивать СNC shield будем в следующей статье. Не пропустите!
Подписывайтесь на мой канал на Youtube и вступайте в группы в Вконтакте и Facebook.
Спасибо за внимание!
portal-pk.ru
Крутим шаговый двигатель – Как подключить – AVR project.ru
Шаговые двигатели достаточны распространены в устройствах, в которых необходимо добиться точного перемещения механизмов. Существует много типов шаговых двигателей, но самыми дружелюбными в плане управления являются 2-х фазные униполярные двигатели. Этот тип двигателей имеет две независимые обмотки с выводами от середины. Их можно встретить преимущественно в старой технике: принтерах, копирах, дисководах (5-и дюймовых) и еще много где.
В зависимости от от того как соединены средние обмотки внутри, из двигателя могут выходить 5 или 6 проводов. Разницы никакой нет, все равно средние выводы обмоток соединяются вместе. Характерной особенностью шаговых двигателей является дискретность поворота ротора, тоесть если взять и покрутить вал двигателя можно ощутить как он фиксируется в определенных моментах. Это и есть шаги двигателя. При запитывании одной из половины обмоток происходит фиксирование вала двигателя в определенном положении. Если снять напряжение с этой обмотки и запитать другую, ротор повернется и зафиксируется в другом положении. Таким образом, если запитывать обмотки в определенной последовательности можно добиться вращения вала двигателя.
Существует несколько алгоритмов управления питанием обмоток двигателя. Самым простым является полношаговое управление, когда в любой момент времени запитана только одна из половинок обмоток. Для наглядности накидал табличку показывающую последовательность включения обмоток:
Ротор при таком управлении принимает естественное положение относительно статора. Есть еще способ управления шаговиком в полношаговом режиме, когда одновременно запитываются две фазы, таким образом удается увеличить момент на валу на 40%.
Главным недостатком полношагового управления являются аццкие вибрации двигателя и малая дискретность шага, равная паспортному значению.
Для того чтобы уменьшить вибрации и добится более плавного и точного вращения вала существует более продвинутый способ – управление в полушаговом режиме, алгоритм включения половинок обмоток приведен ниже:При такой работе вал двигателя за один цикл совершает половину шага и фиксируется между двумя естественными состояниями равновесия. Таким образом дискретность поворота вала увеличивается в 2 раза.
Есть еще способ увеличить дробленеи шага ротора двигателя – микрошаговое управление – когда обмотка не просто запитывается, а запитывается определенным током. И от отношения тока в соседних обмотках зависит положение ротора – чем больший ток течет в обмотке по отношению к соседней, тем ближе к ней смещается ротор и наоборот. Это позволяет увеличить дробление шага в десятки и сотни (!) раз.
С теорией немного разобрались, теперь нужно выбрать в каком режиме будет управляться двигатель. Полный шаг слишком убог и не эффективен, микрошаг сложен, да и нужен он в основном в управлении приводом высокоточного ЧПУ станка. Поэтому крутить будем в полушаге 🙂
Схема базируется на микроконтроллере attiny2313 и имеет две кнопки. При нажатии на одну вал двигателя будет крутиться в одну сторону, при нажатии другой – в другую. В качестве ключевых транзисторов выбраны КТ829, способные протащить через себя до 8 Ампер.
К клемме Udvig подключаются выводы от середин обмоток и туда же подводится напряжение для питания обмоток. Величина напряжения зависит от самого двигателя, для моего например по документации максимальный ток в обмотках 1,5 Ампера, измерив сопротивление обмоток получил 2 Ома, отсюда вывод что напряжение питания не должно превышать 3 В ну или немного больше, учитывая что запитываться будет индуктивная нагрузка.
Кстати диоды D2-D5 стоят для того, чтобы гасить скачки обратного напряжения после закрытия транзистора. Иначе есть вероятность что ЭДС самоиндукции возникающая во время выключения питания обмотки пробъет транзистор.
Плата управления в сборе:
Красный светодиод загорается при нажатии одной из кнопок. Разъем подключения контроллера по UART сделал опционально, на случай если нужно будет приделать управление шаговиком с компа.
Код в Bascom-AVR:
$regfile = “2313def.dat”
$crystal = 4000000
Dim S As Byte ‘эта переменная следит за номером шага двигателя
S = 1
On Int0 Knopka1 ‘даем имена обработчикам внешних прерываний
On Int1 Knopka2
Config Portb = Output ‘конфигурируем порт на выход
Config Portd.5 = Output ‘конфигурируем ногу для подключения светодиода
Led Alias Portd.5 ‘присваиваем имя LED выводу 5 порта D
‘прерывания будут генерироваться пока на ноге низкий уровень, то есть пока кнопка будет нажата
Config Int0 = Low Level
Config Int1 = Low Level
‘разрешаем прерывания
Enable Interrupts
Enable Int0
Enable Int1
‘основной цикл программы, просто ждем прерывания
Do
Loop
Knopka1: ‘обработчик прерывания первой кнопки
Led = 1 ‘зажигаем светодиод
Incr S ‘увеличим номер шага
If S = 9 Then ‘максимально возможный номер шага = 8
S = 1
End If
Select Case S ‘выбираем какие обмотки включать в зависимости от номера шага
Case 1 : Portb = &B00000001
Case 2 : Portb = &B00000011
Case 3 : Portb = &B00000010
Case 4 : Portb = &B00000110
Case 5 : Portb = &B00000100
Case 6 : Portb = &B00001100
Case 7 : Portb = &B00001000
Case 8 : Portb = &B00001001
End Select
Waitus 1000 ‘задержка между шагами
Led = 0 ‘гасим светодиод
Return
Knopka2: ‘обработчик прерывания второй кнопки
Led = 1 ‘зажигаем светодиод
Decr S ‘тут все тоже самое, только в обратном направлении
If S = 0 Then ‘минимально возможный номер шага = 1
S = 8
End If
Select Case S
Case 1 : Portb = &B00000001
Case 2 : Portb = &B00000011
Case 3 : Portb = &B00000010
Case 4 : Portb = &B00000110
Case 5 : Portb = &B00000100
Case 6 : Portb = &B00001100
Case 7 : Portb = &B00001000
Case 8 : Portb = &B00001001
End Select
Waitus 1000
Led = 0 ‘гасим светодиод
Return
End
Изменяя величину задержки между шагами, можно в больших пределах регулировать скорость вращения вала. При выбранной мной задержке в 1000 мкс с шаговиком имеющем 200 шагов на оборот (400 полушагов) скорость вращения получается примерно 2,5 оборота в секунду.
Скачать файлы к проекту
UPD: Здесь допилил программу, теперь стало возможным управление шаговым двигателем с компьютера.
avrproject.ru
