
Как запустить шаговый двигатель без электроники своими руками
У меня много различной оргтехники, которая вышла из строя. Выбрасывать я её не решаюсь, а вдруг пригодится. Из её частей возможно сделать что-нибудь полезное.К примеру: шаговый двигатель, который так распространен, обычно используется самодельщиками как мини генератор для фонарика или ещё чего. Но я практически никогда не видел, чтобы его использовали именно как двигатель для преобразования электрической энергии в механическую. Оно и понятно: для управления шаговым двигателем нужна электроника. Его просто так к напряжению не подключишь.
И как оказалось – я ошибался. Шаговый двигатель от принтера или ещё от какого устройства, довольно просто запустить от переменного тока.
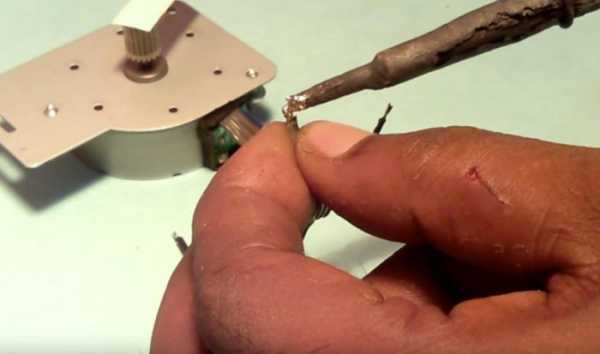
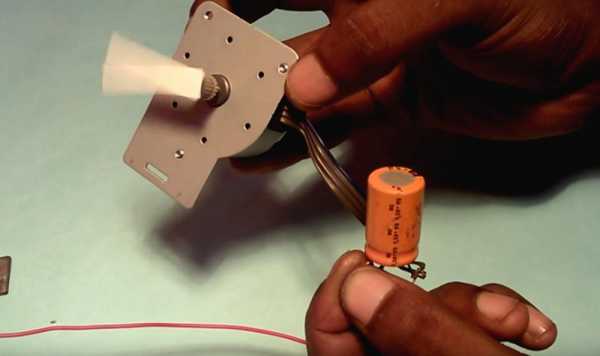
Я взял вот такой двигатель.
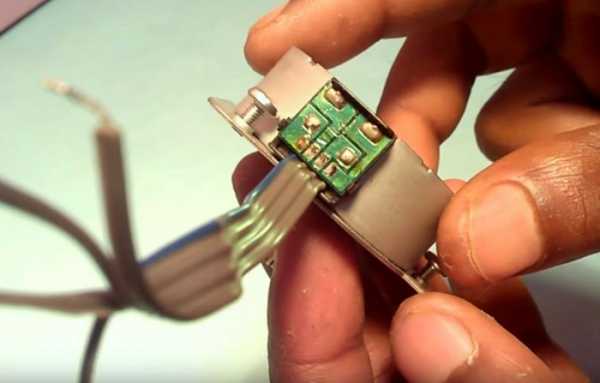
Обычно у них четыре вывода, две обмотки. В большинстве случаем, но есть и другие конечно. Я рассмотрю самый ходовой.
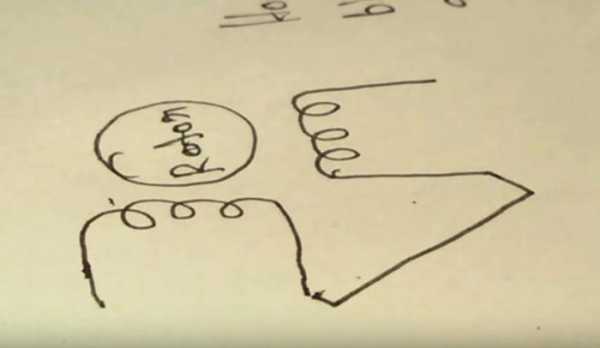
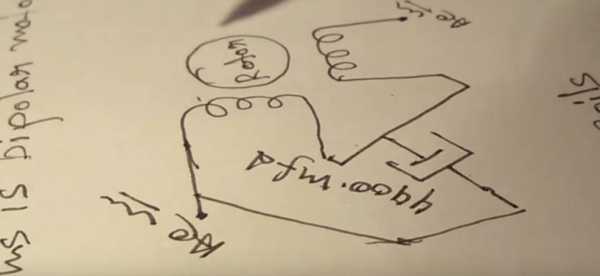
Схема шагового двигателя
Его схема обмоток выглядит примерно так:
Очень похоже на схему обычного асинхронного двигателя.
Для запуска понадобится:
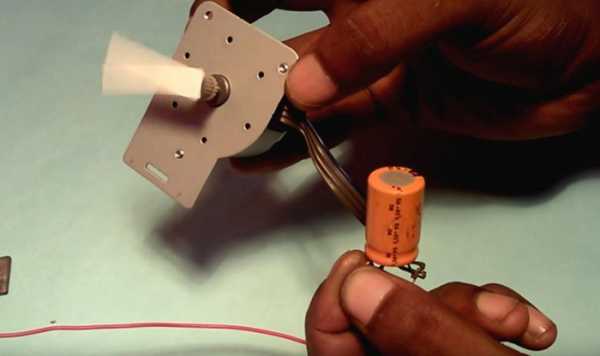
- Конденсатор емкостью 470-3300 мкФ.
- Источник переменного тока 12 В.
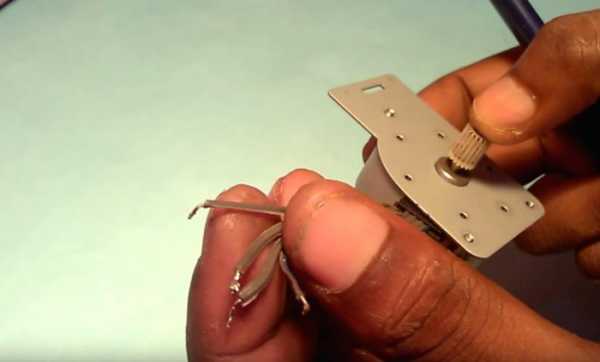
Замыкаем обмотки последовательно.
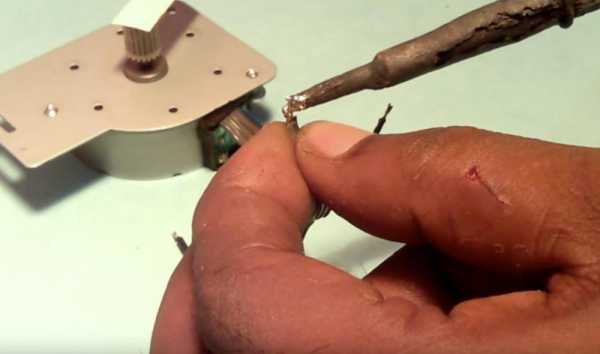
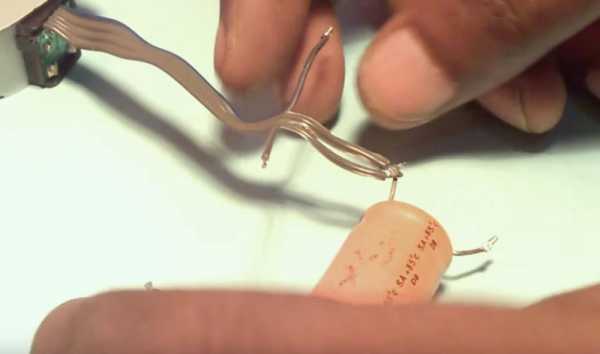
Середину проводов скручиваем и запаиваем.
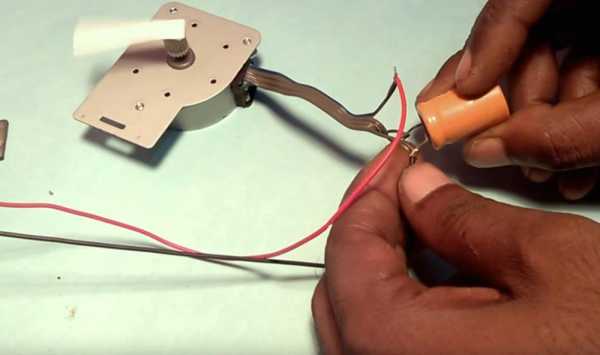
Подключаем конденсатор одним выводом к середине обмоток, а вторым выводом в источнику питания на любой выход. Фактически конденсатор будет параллелен одной из обмоток.


Подаем питание и двигатель начинает крутиться.
Если перекинуть вывод конденсатора с одного выхода питания на другой, то вал двигателя начнет вращаться в другую сторону.
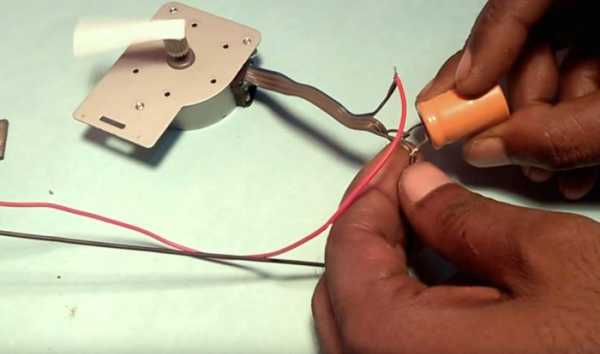
Все предельно просто. А принцип работы этого всего очень прост: конденсатор формирует сдвиг фаз на одной из обмоток, в результате обмотки работают почти попеременно и шаговый двигатель крутится.
Очень жалко то, что обороты двигателя невозможно регулировать. Увеличение или уменьшение питающего напряжения ни к чему не приведет, так как обороты задаются частотой сети.
Хотелось бы добавить, что в данном примере используется конденсатор постоянного тока, что является не совсем правильным вариантом. И если вы решитесь использовать такую схему включения, берите конденсатор переменного тока. Его так же можно сделать самому, включив два конденсатора постоянного тока встречно-последовательно.
Сморите видео
sdelaysam-svoimirukami.ru
Запуск шагового двигателя без электроники
У любого радиолюбителя часто скапливается не мало различной оргтехники, которая вышла из строя. Выбрасывать я её ни кто не решается, так как из ее внутренностей можно сделать что ни будь полезное или выпаять некоторые детали. К примеру: шаговый двигатель, который так распространен, обычно используется любителями самоделок как мини генератор для фонарика или для чего то ещё. Но я практически никогда не видел, чтобы его использовали именно как двигатель для преобразования электрической энергии в механическую. Это и понятно: для управления шаговым двигателем нужна электроника и его просто так к напряжению не подключишь.
Но оказывается что данное мнение является ошибочным. Шаговый двигатель от принтера или от другого устрой устройства, можно легко запустить от переменного тока.
Для эксперимента использовался вот такой шаговый двигатель:
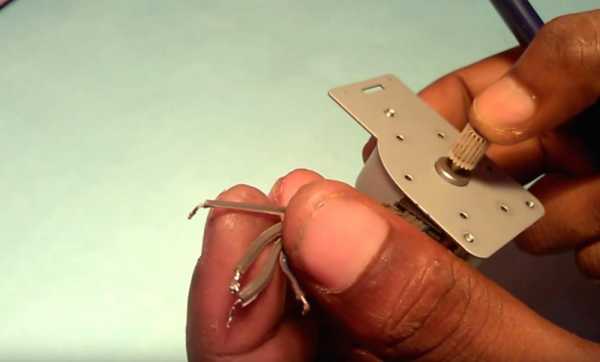
Обычно у них четыре вывода и две обмотки, в большинстве случаев, но есть и другие конечно. В данном случае будет рассмотрен самый ходовой двигатель.
Схема шагового двигателя
Схема обмоток данного двигателя выглядит вот так:
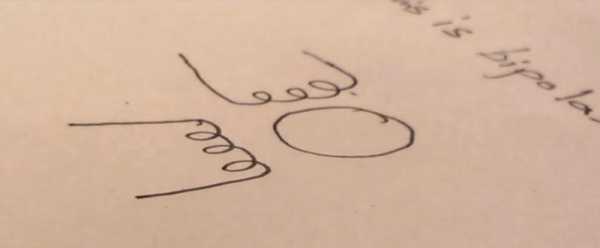
Она очень похожа на схему обычного асинхронного двигателя.
Для запуска двигателя понадобится:
- Электролитический конденсатор 470-3300 мкФ.
- Источник переменного тока 12 Вольт.
Замыкаем обмотки последовательно, как на схеме ниже.
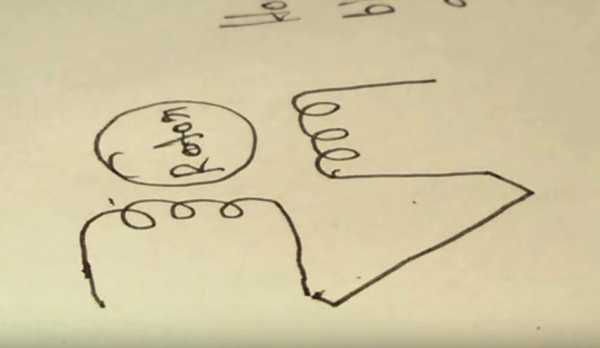
Середину проводов нужно скрутить и спаять.
Подключаем конденсатор одним выводом к середине обмоток, а вторым выводом к источнику питания на любой контакт. Фактически электролитический конденсатор будет параллелен одной из обмоток.
Подаем питание и двигатель начинает крутиться.
Если перекинуть вывод конденсатора с одного выхода питания на другой, то вал двигателя начнет вращаться в другую сторону.
Все достаточно просто. Принцип работы этой схемы очень прост: конденсатор формирует сдвиг фаз на одной из обмоток, в результате обмотки работают почти попеременно и шаговый двигатель крутится.
Единственные минус заключается в том, что обороты двигателя невозможно регулировать. Увеличение или уменьшение питающего напряжения ни к чему не приведет, так как обороты задаются частотой сети.
Хотелось бы добавить, что в данном примере используется конденсатор постоянного тока, что является не совсем правильным вариантом. И если вы решитесь использовать такую схему включения, берите конденсатор переменного тока. Его так же можно сделать самому, включив два конденсатора постоянного тока встречно-последовательно.
Сморите видео
Источник: https://sdelaysam-svoimirukami.ru
Похожее
kavmaster.ru
УПРАВЛЕНИЕ ШАГОВЫМ ДВИГАТЕЛЕМ
Шаговые двигатели присутствуют в автомобилях, принтерах, компьютерах, стиральных машинах, электробритвах и многих других устройствах из повседневного быта. Однако многие радиолюбители до сих пор не знают, как заставить такой мотор работать и что он вообще из себя представляет. Итак, давайте узнаем, как использовать шаговый двигатель.
Шаговые двигатели являются частью класса моторов, известных как безщеточные двигатели. Обмотки шагового двигателя являются частью статора. На роторе расположен постоянный магнит или, для случаев с переменным магнитным сопротивлением, зубчатый блок из магнитомягкого материала. Все коммутации производятся внешними схемами. Обычно система мотор — контроллер разрабатывается так, чтобы была возможность вывода ротора в любую, фиксированную позицию, то есть система управляется по положению. Цикличность позиционирования ротора зависит от его геометрии.

Типы шаговых двигателей
Существуют три основных типа шаговых двигателей: переменной индуктивности, двигатели с постоянными магнитами, и гибридные двигатели.
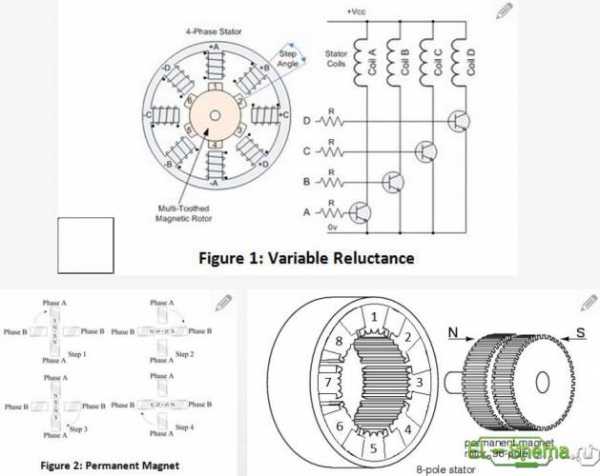
Двигатели переменной индуктивности используют только генерируемое магнитное поле на центральном валу, заставляющее вращаться и находиться на одной линии с напряжением электромагнитов.
Двигатели с постоянными магнитами
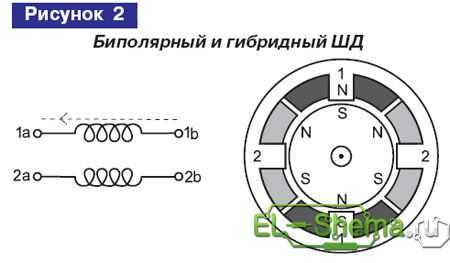
Гибридный мотор — это сочетание двух предыдущих. У его намагниченного центрального вала имеется два набора зубов для двух магнитных полюсов, которые затем выстраиваются в линию с зубами вдоль электромагнитов. В связи с двойным набором зубов на центральном валу, гибридный двигатель имеет наименьший доступный размер шага и поэтому является одним из наиболее популярных типов шаговых двигателей.
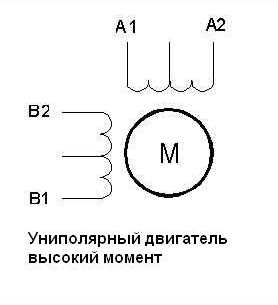
Униполярные и биполярные шаговые двигатели
Также существует ещё два типа шаговых двигателей: униполярные и биполярные. На фундаментальном уровне, эти два типа работать точно так же; электромагниты включены в последовательном виде, заставляя центральный вал двигателя вращаться.
Но униполярный шаговый двигатель работает только с положительным напряжением, а биполярный шаговый двигатель имеет два полюса — положительный и отрицательный.
То есть фактическая разница между этими двумя типами заключается в том, что для однополярных требуется дополнительный провод в середине каждой катушки, что позволит току проходить либо к одному концу катушки, либо другому. Эти два противоположных направления производят две полярности магнитного поля, фактически имитируя как положительные, так и отрицательные напряжения.
Хотя оба они имеют общий уровень питающих напряжений 5V, биполярный шаговый двигатель будет иметь больший крутящий момент, потому что ток течет через всю катушку, производя более сильное магнитное поле. С другой стороны, униполярные шаговые двигатели используют только половину длины катушки из-за дополнительного провода в середине катушки, а значит меньший крутящий момент доступен для удержания вала на месте.
Подключение шаговых двигателей
Разные шаговые двигатели могут иметь разное количество проводов, как правило, 4, 5, 6, или 8. 4-х проводные линии могут поддержать только биполярные шаговые двигатели, поскольку у них нет центрального провода.

5-ти и 6-ти проводные механизмы могут быть использованы как для однополярного, так и биполярного шагового двигателя, в зависимости от того, используется центральный провод на каждой из катушек или нет. 5-ти проводная конфигурация подразумевает, что центральные провода на два комплекта катушек соединены внутри между собой.
Способы управления шаговыми двигателями
Есть несколько различных способов управления шаговыми двигателями — полный шаг, полушаг, и микрошаговый. Каждый из этих стилей предлагают различные крутящие моменты, шаги и размеры.
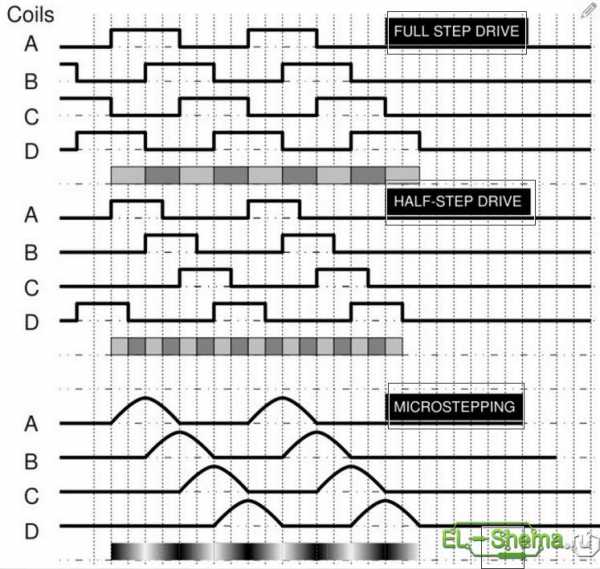
Полный шаг — такой привод всегда имеет два электромагнита. Для вращения вала, один из электромагнитов выключается и далее электромагнит включен, вызывая вращение вала на 1/4 зуба (по крайней мере для гибридных шаговых двигателей). Этот стиль имеет самый сильный момент вращения, но и самый большой размер шага.
Полшага. Для вращения центрального вала, первый электромагнит находится под напряжением, как первый шаг, затем второй также под напряжением, а первый все еще работает на второй шаг. При третьем шаге выключается первый электромагнит и четвертый шаг — поворот на третий электромагнит, а второй электромагнит по-прежнему работает. Этот метод использует в два раза больше шагов, чем полный шаг, но он также имеет меньший крутящий момент.
Микрошаговый
Схема подключения шаговых двигателей
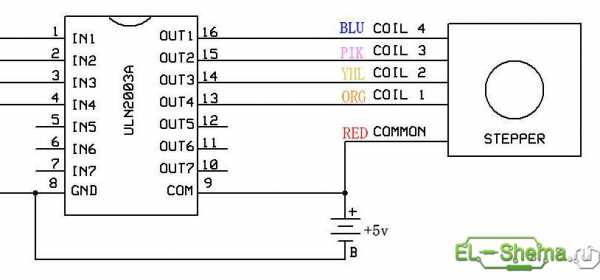
Чтобы управлять шаговым двигателем необходим контроллер. Контроллер — схема, которая подает напряжение к любой из четырех катушек статора. Схемы управления достаточно сложны, по сравнению с обычными электромоторчиками, и имеют много особенностей. Подробно рассматривать тут мы их не будем, а просто приведём фрагмент популярного контроллера на ULN2003A.
В общем шаговые двигатели являются отличным способом для того, чтобы повернуть что-то в точный размер угла с большим количеством крутящего момента. Другое преимущество их в том, что скорость вращения может быть достигнута почти мгновенно при изменении направления вращения на противоположное.
el-shema.ru
Шаговые двигатели (подробный разбор 4 типов)
Общие сведения:
Шаговый двигатель — это бесколлекторный двигатель, ротор которого вращается не плавно, а шагами (дискретно). Полный оборот ротора состоит из нескольких шагов. Меняя форму сигнала, количество импульсов, их длительность и фазовый сдвиг, можно задавать скорость вращения, направление вращения и количество оборотов ротора двигателя.
Шаговые двигатели состоят из ротора (подвижная часть) и статора (неподвижная часть). На статоре устанавливают электромагниты, а части ротора взаимодействующие с электромагнитами выполняются из магнитотвердого (двигатель с постоянными магнитами) или магнитомягкого (реактивный двигатель) материала.
Виды шаговых двигателей по типу ротора:
По типу ротора, шаговые двигатели делятся на: двигатели с постоянными магнитами, реактивные двигатели и гибридные двигатели.
- Двигатель с постоянными магнитами (ротор из магнитотвердого материала). На роторе установлен один, или несколько, постоянных магнитов. Количество полных шагов в одном обороте таких двигателей, зависит от количества постоянных магнитов на роторе, и количества электромагнитов на статоре. Обычно в одном обороте от 4 до 48 шагов (один шаг от 7,5° до 90°).
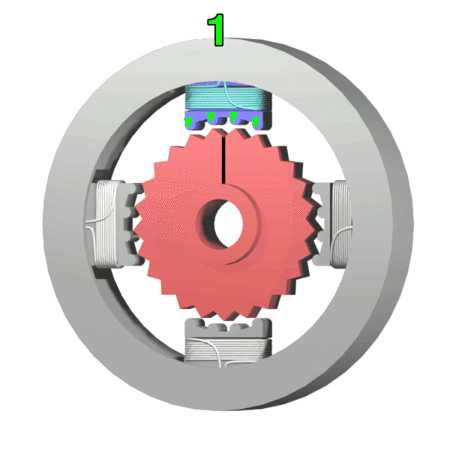
- Реактивный двигатель (ротор из магнитомягкого материала). Еще такие двигатели называют двигателями с переменным магнитным сопротивлением. Ротор не имеет постоянных магнитов, он выполнен из магнитомягкого материала в виде многоконечной звезды. Данные двигатели встречаются редко, так как у них наименьший крутящий момент, по сравнению с остальными, при тех же размерах. Количество полных шагов в одном обороте таких двигателей, зависит от количества зубцов на звезде ротора, и количества электромагнитов на статоре. Обычно в одном обороте от 24 до 72 шагов (один шаг от 5° до 15°.)
- Гибридный двигатель (совмещает технологии двух предыдущих двигателей). Ротор выполнен из магнитотвердого материала (как у двигателя с постоянными магнитами), но имеет форму многоконечной звезды (как у реактивного двигателя). Количество полных шагов в одном обороте таких двигателей, зависит от количества постоянных магнитов на звезде ротора, и количества электромагнитов на статоре. Количество шагов в одном обороте таких двигателей может доходить до 400 (один шаг от 0,9°).
Какой тип шагового двигателя у меня?
Если вручную покрутить ротор отключённого двигателя, то можно заметить, что он движется не плавно, а шагами. После того, как Вы покрутили ротор, замкните все провода двигателя и покрутите ротор повторно. Если ротор крутится также, значит у Вас реактивный двигатель. Если для вращения ротора требуется прикладывать больше усилий, значит у вас двигатель с постоянными магнитами или гибридный. Отличить двигатель с постоянными магнитами от гибридного можно подсчитав количество шагов в одном обороте. Для этого не обязательно считать все шаги, достаточно примерно понять, их меньше 50 или больше. Если меньше, значит у Вас двигатель с постоянными магнитами, а если больше, значит у Вас гибридный двигатель.
Виды шаговых двигателей по типу соединения электромагнитов статора:
По типу соединения электромагнитов, шаговые двигатели делятся на: униполярные и биполярные.
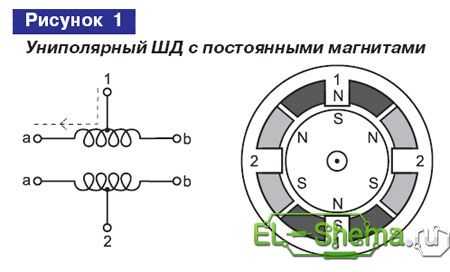
На рисунке представлено упрощённое, схематическое, представление обмоток.
На самом деле, каждая обмотка состоит из нескольких обмоток электромагнитов, соединённых последовательно или параллельно
- Биполярный двигатель имеет 4 вывода. Выводы A и A питают обмотку AA, выводы B и B питают обмотку BB. Для включения электромагнита, на выводы обмотки необходимо подать разность потенциалов (два разных уровня), поэтому двигатель называется биполярным. Направление магнитного поля зависит от полярности потенциалов на выводах.
- Униполярный двигатель имеет 5 выводов. Центральные точки его обмоток соединены между собой и являются общим (пятым) выводом, который, обычно, подключают к GND. Для включения электромагнита, достаточно подать положительный потенциал на один из выводов обмотки, поэтому двигатель называется униполярным. Направление магнитного поля зависит от того, на какой именно вывод обмотки подан положительный потенциал.
- 6-выводной двигатель имеет ответвление от центральных точек обмоток, но обмотка AA не соединена с обмоткой BB. Если не использовать выводы центральных точек обмоток, то двигатель будет биполярным, а если эти выводы соединить и подключить к GND, то двигатель будет униполярным.
- 8-выводной двигатель является наиболее гибким в плане подключения электромагнитов. Данный двигатель можно не только использовать как биполярный или униполярный, но и самим определять, как соединить электромагниты обмоток, последовательно или параллельно.
Какой тип шагового двигателя у меня?
Если у Вашего двигателя 4 вывода, значит он биполярный. Если у Вашего двигателя 5 выводов, значит он униполярный. Но если у Вашего двигателя 6 и более выводов, то это не значит что некоторые из них являются центральными выводами катушек электромагнитов. Дело в том, что есть двигатели, некоторые выводы которых (обычно крайние), электрически замкнуты, так биполярный двигатель может иметь 6 выводов. Точно определить тип соединений, для двигателей с 6 и более выводами, можно только измеряя сопротивление между выводами.
Режимы работы шаговых двигателей:
- Для работы шагового двигателя (вне зависимости от его вида) можно выбрать один из трех режимов работы:
- Полношаговый режим – ротор поворачивается на 1 шаг за 1 такт.
- Полушаговый режим – ротор поворачивается на ½ шага за 1 такт.
- Микрошаговый режим – ротор поворачивается на ¼, ⅛ и т.д. шагов за 1 такт.
Ниже рассмотрены режимы работы, на примере биполярного двигателя с постоянным магнитом и полным шагом 90°.
Полношаговый режим (одна фаза на полный шаг). Номинальные значения шагового двигателя указываются именно для этого режима.
Полношаговый режим (две фазы на полный шаг). Этот режим позволяет увеличить крутящий момент почти в половину от номинального.
Полушаговый режим. Этот режим позволяет увеличить количество шагов в полном обороте в два раза, при незначительном уменьшении крутящего момента.
Микрошаговый режим. Этот режим является наиболее распространённым, он позволяет увеличить количество шагов в полном обороте в четыре раза, благодаря неравномерному распределению токов в обмотках. Снижение токов можно достичь снижением напряжения (как показано на картинке) или подавать полное напряжение через подключаемую внешнюю нагрузку.
Если подавать уровни не «0» – «½» – «1» (как на картинке), а «0» – «¼» – «½» – «¾» – «1», то количество шагов в полном обороте увеличится не в 4 раза, а в 8 раз. Можно увеличить количество шагов в 16, 32, 64 раза и т.д., а если заменить дискретные уровни сигналов на синусоиды, то мотор будет вращаться плавно (без шагов).
Режимы пониженного энергопотребления – доступны только для 8-выводных двигателей. Эти режимы отличаются от обычных тем, что используют только половину фазы (половину электромагнитов). Данные режимы используются редко, так как они значительно снижают крутящий момент двигателя.
Пример работы шаговых двигателей с разными видами роторов:
Подключение шаговых двигателей к Arduino:
Электромоторы нельзя подключать к выводам Arduino напрямую, так как они потребляют значительные токи, шаговые двигатели не являются исключением, поэтому их подключают через драйверы.
Большинство драйверов работают либо с биполярными двигателями, либо с униполярными.
- Биполярный двигатель можно подключить только к драйверу биполярных двигателей.
- 6-выводной двигатель можно подключить к любому драйверу. Если не использовать выводы центральных точек обмоток, то дви
wiki.iarduino.ru
Подключение шагового двигателя: схема подключения
Шаговый двигатель, биполярный или униполярный, представляет собой электрическое устройство постоянного тока, разделяющее оборот на определённое количество шагов. Количество и величина шагов задаётся специальным устройством, именуемым контроллер шагового двигателя. Схема шаговый двигатель + контроллер шагового двигателя широко применяется в самых различных механизмах, от бытовой техники до ЧПУ. ШД обеспечивает стабильную и бесперебойную работу оборудования, частью которого он является, однако прежде чем начать работу, его необходимо правильно подключить.
Подключение шагового двигателя
В общем и целом процесс подключения шагового двигателя не является затруднительным. В первую очередь нужно определить, какой тип ШД используется. Для этого следует обратить внимание на то, сколькими проводами снабжён электропривод. В зависимости от типа, шаговый двигатель может иметь 4, 5, 6 или 8 проводов.
Шаговый двигатель с 4 проводами может использоваться совместно только с биполярными устройствами. Каждая из двух фазных обмоток такого электродвигателя имеет пару проводов с непрерывной связью. Драйвер ШД в данном случае подключается пошагово.
Шаговый двигатель, оснащённый 6-ю или 8-ю проводами, помимо пары проводов для каждой из обмоток имеет также центр-кран для каждой из них. Такой электродвигатель считается униполярным и может быть подключён как к биполярным, так и к униполярным устройствам. Для разделения провода при подключении униполярного ШД рекомендуется использовать измерительный прибор. Если униполярный шаговый двигатель подключается к однополярному элементу, допускается использование всех проводов. Если же подключение необходимо произвести к биполярному оборудованию, используются один конец провода и один центральный кран для каждой из обмоток.
Шаговый двигатель с 5-ю проводами схож с шестипроводным, однако центральные клеммы такого электродвигателя соединяются внутри сплошным кабелем, после чего выводятся к одному проводу. Разделение проводов в таком механизме – довольно трудоёмкий процесс, который очень сложно произвести без разрывов. Наиболее безопасным и эффективным выходом из ситуации при подключении такого прибора является определение центра провода с последующим соединением его с другими проводниками.
Стандартной схемой, использующейся для подключения 4-выводного биполярного ШД к драйверу или контроллеру является подключение первой обмотки к разъёмам А и А*, а второй – непосредственно к контроллеру через разъёмы B и B*. Разъёмы контроллера Dir и Step при таком методе подключения не используются; программное управление осуществляется при помощи генератора импульсов.
ВНИМАНИЕ – всегда проверяйте цветовую схему выводов, шаговый двигатель от конкретного производителя отличается от абсолютно аналогичного ШД другого производителя, а значит, может иметь другую цветовую схему выводов!
По вопросу подключения шагового двигателя, вы всегда можете обратиться к нашим специалистам по телефону по России (звонок бесплатный) 8 800 5555 068 либо по электронной почте.
stepmotor.ru
Подключение униполярного шагового двигателя NEMA 23 57HM56-2006 к RAMPS 1.4
Добрый день 3д печатники и ‘колхозники’.Подключение униполярного шагового двигателя NEMA 23 57HM56-2006 к RAMPS 1.4.
Шаговый униполярный двигатель NEMA 23 57HM56-2006 имеет шесть проводов, и что бы подключить его к Ramp 1.4 или любой другой плате нам потребуется переделать его из униполярного в биполярный.
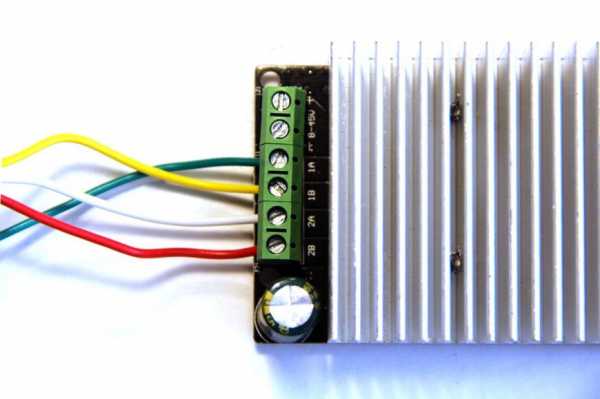
 Шаговый униполярный двигатель NEMA 23 57HM56-2006 имеет ток 2 А, поэтому обычный драйвер шагового двигателя A4998 нам не подойдёт. Я буду использовать драйвер ШД TB6600 и плату MKS CD 57/86, что бы подключить его к ramps.
Шаговый униполярный двигатель NEMA 23 57HM56-2006 имеет ток 2 А, поэтому обычный драйвер шагового двигателя A4998 нам не подойдёт. Я буду использовать драйвер ШД TB6600 и плату MKS CD 57/86, что бы подключить его к ramps.Немного теории.
Биполярный двигатель имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля должна переполюсовываться драйвером. Для такого типа двигателя требуется мостовой драйвер, или полумостовой с двухполярным питанием. Всего биполярный двигатель имеет две обмотки и, соответственно, четыре вывода.
Униполярный двигатель также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки. При этом существенно упрощается схема драйвера. Драйвер должен иметь только 4 простых ключа. Таким образом, в униполярном двигателе используется другой способ изменения направления магнитного поля. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов. Иногда униполярные двигатели имеют раздельные 4 обмотки, по этой причине их ошибочно называют 4-х фазными двигателями. Каждая обмотка имеет отдельные выводы, поэтому всего выводов 8. При соответствующем соединении обмоток такой двигатель можно использовать как униполярный или как биполярный. Униполярный двигатель с двумя обмотками и отводами тоже можно использовать в биполярном режиме, если отводы оставить неподключенными.
Если сравнивать между собой биполярный и униполярный двигатели, то биполярный имеет более высокую удельную мощность. При одних и тех же размерах биполярные двигатели обеспечивают больший момент.
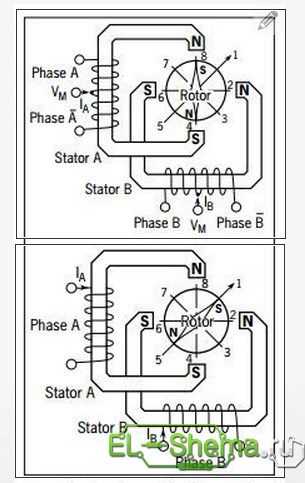
На схеме ниже показаны два двигателя. Слева униполярный, 6 выводов. Справа биполярный, 4 вывода.
Аналогичная схема ниже, но у же с буквенным обозначением выводов.Слева биполярный, справа униполярный двигатель.
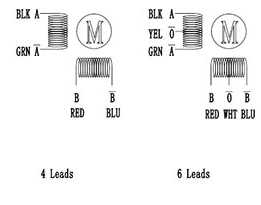 Исходя из схем выше, возможно два варианта переделки униполярного двигателя в биполярный двигатель.
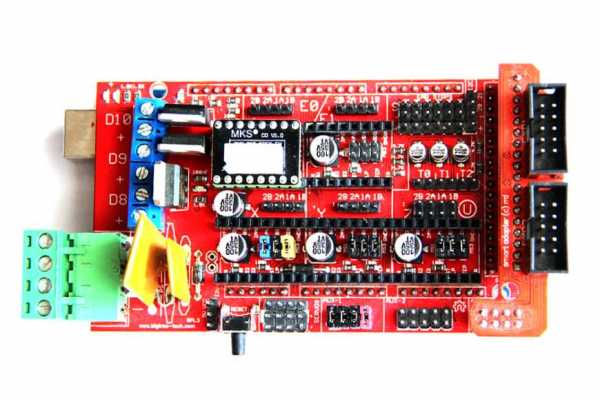
Исходя из схем выше, возможно два варианта переделки униполярного двигателя в биполярный двигатель.Я соберу тестовый стенд для наглядности, который включает в себя: ramps 1.4, arduino mega 2560, драйвер шагового двигателя TB6600, плата MKS CD 57/86 для внешнего драйвера ШД TB6600, LCD Display 2004, шаговый двигатель NEMA 23 57HM56-2006.
1) Первый вариант. Подключаем двигатель к драйверу не используя центральные выводы в обмотках, то есть желтый и белый. Таким способом подключения мы получим высокий момент.
 Пошаговая инструкция для чайников :).
Пошаговая инструкция для чайников :).1) Устанавливаем плату MKS CD 57/86 в штатный разъем ramps 1.4 для шагового драйвера, соблюдая полярность.

 2) Подключаем драйвер шагового двигателя TB6600 к плате MKS CD 57/86 кабелем с разъемом PH-4 и PH-4.
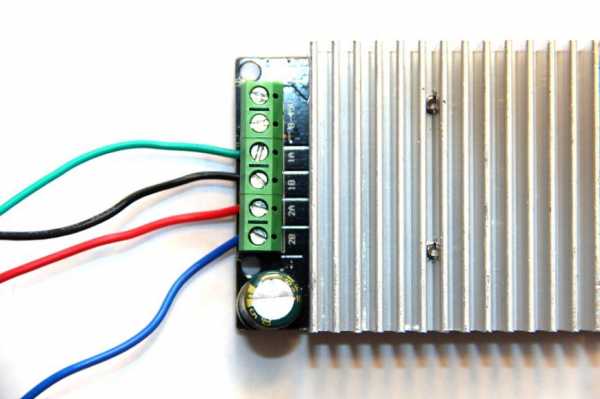
2) Подключаем драйвер шагового двигателя TB6600 к плате MKS CD 57/86 кабелем с разъемом PH-4 и PH-4.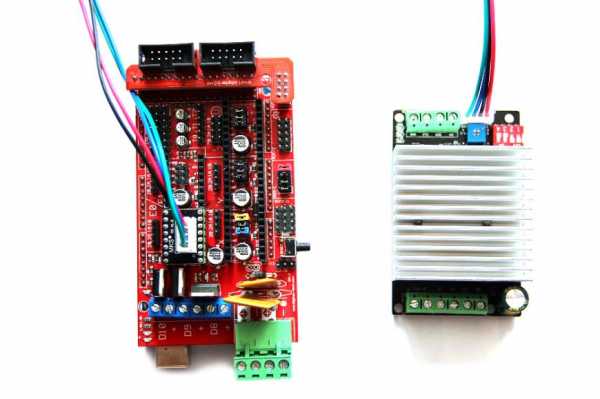 3) Подключаем шаговый двигатель NEMA 23 57HM56-2006 к драйверу ШД TB6600. Зеленый провод в разъём 1A, черный в разъём 1B, красный в разъём 2A, синий в разъём 2B. Желтый и белый провода лучше заизолировать, чтоб лишний раз с бубном не прыгать.
3) Подключаем шаговый двигатель NEMA 23 57HM56-2006 к драйверу ШД TB6600. Зеленый провод в разъём 1A, черный в разъём 1B, красный в разъём 2A, синий в разъём 2B. Желтый и белый провода лучше заизолировать, чтоб лишний раз с бубном не прыгать.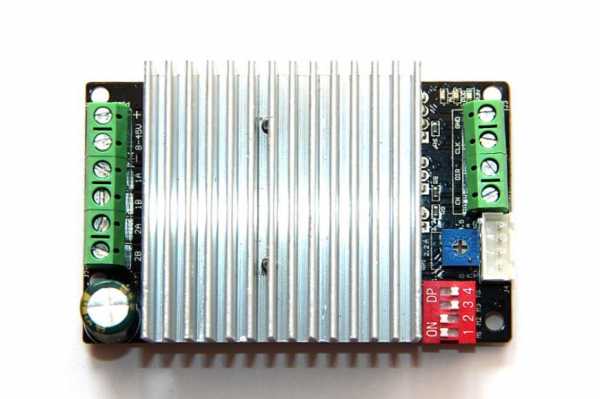
 4) Подключаем питание от 8-45 В к драйверу шагового двигателя TB6600.
4) Подключаем питание от 8-45 В к драйверу шагового двигателя TB6600.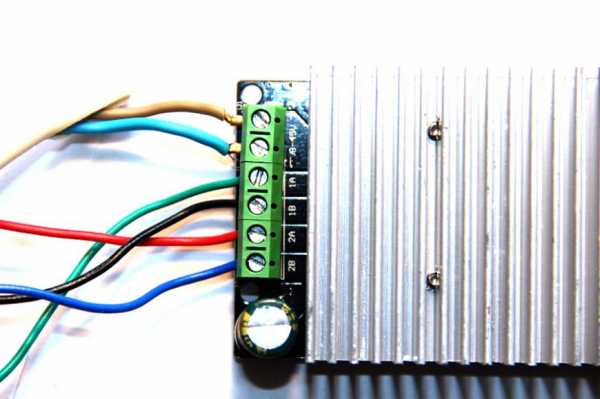 Предыдущие четыре шага на фото ниже.
Предыдущие четыре шага на фото ниже.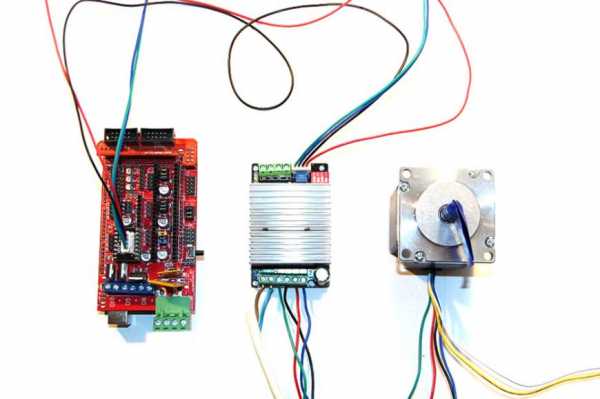 Подключаем LSD дисплей и питание к ramps 1.4.
Подключаем LSD дисплей и питание к ramps 1.4.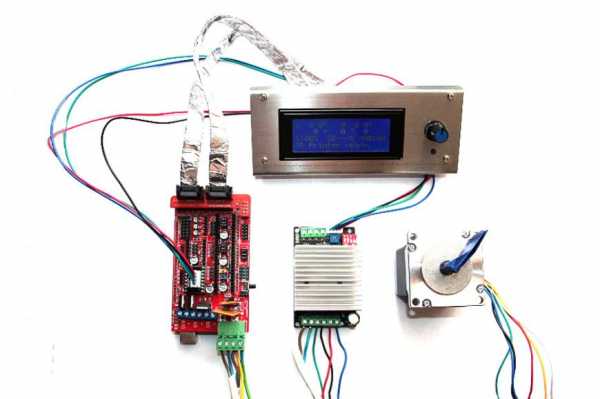 Запускаем двигатель и радуемся результату ;).2) Второй вариант. Подключаем двигатель к драйверу не используя крайние выводы в обмотках, то есть черный и синий. Таким способом подключения мы получим высокую приемистость.
Запускаем двигатель и радуемся результату ;).2) Второй вариант. Подключаем двигатель к драйверу не используя крайние выводы в обмотках, то есть черный и синий. Таким способом подключения мы получим высокую приемистость.  Пошаговая инструкция уже для опытных мейкеров 8).
Пошаговая инструкция уже для опытных мейкеров 8).1) Устанавливаем плату MKS CD 57/86 в штатный разъем ramps 1.4 для шагового драйвера, соблюдая полярность.
2) Подключаем драйвер шагового двигателя TB6600 к плате MKS CD 57/86 кабелем с разъемом PH-4 и PH-4.
3) Подключаем шаговый двигатель NEMA 23 57HM56-2006 к драйверу ШД TB6600. Зеленый провод в разъём 1A, желтый в разъём 1B, белый в разъём 2A, красный в разъём 2B. Черный и синий провода лучше заизолировать, не ну если Вам нравится прыгать с бубном то не делайте этого.
 4) Подключаем питание от 8-45 В к драйверу шагового двигателя TB6600.
4) Подключаем питание от 8-45 В к драйверу шагового двигателя TB6600.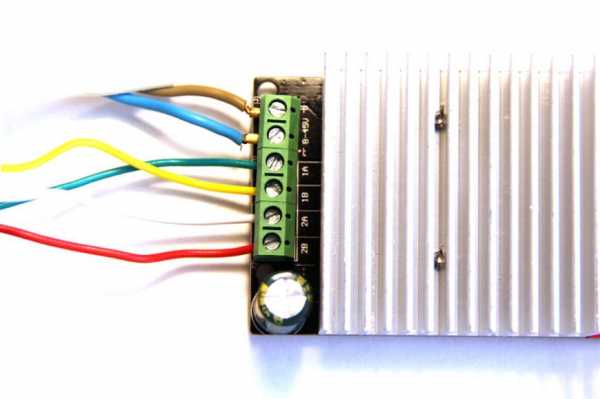 Предыдущие четыре шага на фото ниже.
Предыдущие четыре шага на фото ниже.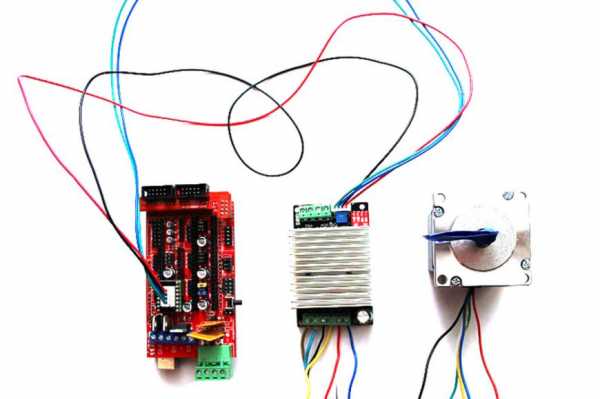 Подключаем LSD дисплей и питание к ramps 1.4.
Подключаем LSD дисплей и питание к ramps 1.4.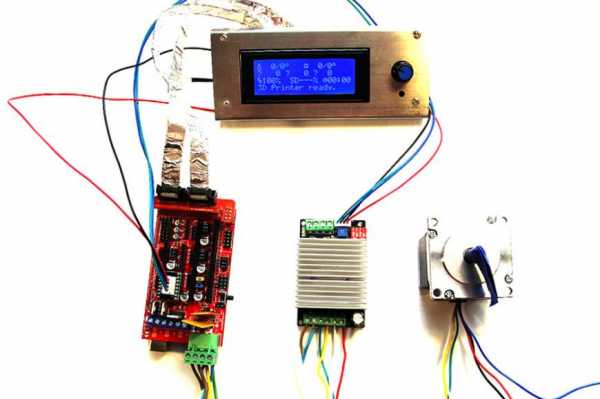 Таким образом, подключить униполярный шаговый двигатель к ramps 1.4 не так уж и сложно, достаточно немного знать теории и быть внимательным. Надеюсь, что теперь Вам помощь бубна в этой теме не потребуется ;).
Таким образом, подключить униполярный шаговый двигатель к ramps 1.4 не так уж и сложно, достаточно немного знать теории и быть внимательным. Надеюсь, что теперь Вам помощь бубна в этой теме не потребуется ;).Ссылки на компоненты из статьи.
1. Шаговый двигатель nema 23 57HM56-2006;
2. Драйвер шагового двигателя TB6600;
3. Шилд (надстройка) RAMPS 1.4;
4. Плата управления arduino mega 2560;
5. Плата МКС CD 57/86 для внешнего драйвера;
6. LCD Display 2004 RAMPS 1.4.
З.Ы.
3dtoday.ru
Как “крутить” шаговый двигатель без микроконтроллера
Шаговые двигатели полезны при управлении ими программируемым устройством но тем не менее могут возникать случаи когда в сложном управлении шаговым двигателем нет необходимости и нужен, всего лишь, большой крутящий момент и/или низкие обороты. Схема простого контроллера шагового двигателя приведена на рисунке: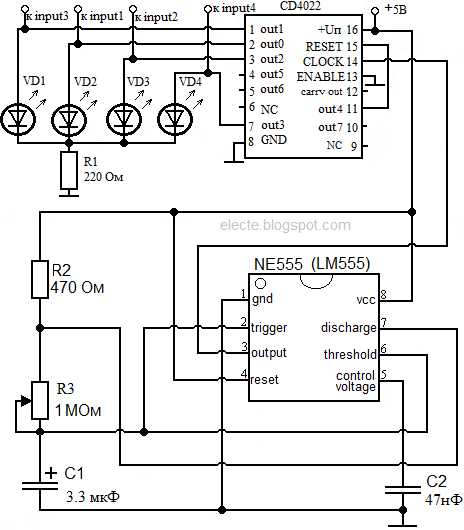
Рисунок 1 – Контроллер шагового двигателя
Контроллер состоит из мультивибратора на таймере 555, микросхемы десятичного счётчика 4022 (CD4022, HEF4022 и т.д.) и необязательных светодиодов с резистором для визуализации и наглядности, резистор один т.к. больше одного светодиода в данной схеме светиться не может. Счётчик десятичный т.е. при подаче на его тактовый вход (CLOCK (вывод 14)) импульсов напряжения на выводе соответствующему выходу номер которого совпадает с количеством поданных импульсов, после сброса, появляется напряжение уровня логической единицы, на всех остальных выводах выходов, при этом, устанавливаются напряжения уровня логического нуля. Вывод “11” соединён с выводом “15” для того чтобы ограничить счёт данного счётчика. Когда на тактовый вход приходит четвёртый импульс, после сброса, на выводе “11” (выход out4) появляется напряжение уровня логической единицы которое подаётся на вывод “15” (RESET) – вывод сброса, от этого счётчик происходит сброс счётчика в исходное состояние когда напряжение уровня логической единицы будет на выводе “2” который соответствует выходу out0 (т.е. 0 импульсов пришло на тактовый вход). Если вывод “15” соединить с “землёй” (GND, минус ноль питания) а “14” при этом никуда не соединять то счётчик будет считать 7 импульсов, 8ой импульс произведёт сброс и счёт пойдёт заново (так можно сделать мигалку с 8 светодиодами). Если убрать мультивибратор и светодиоды то останется только микросхема 4022 и её можно использовать с программируемым устройством для управления шаговым двигателем подавая на тактовый вход этой микросхемы импульсы с программируемого устройства. Вместе с этим контроллером можно использовать например драйвер на эмиттерных повторителях на транзисторах такая схема универсальная, безопасная при неправильном управлении но у неё есть недостатки, можно также использовать микросхему драйвер если она подходит. Схема драйвера:
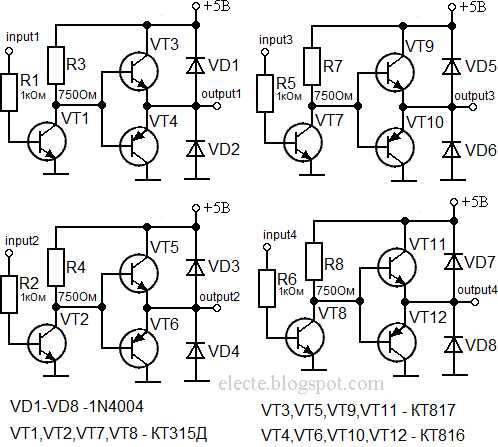
Рисунок 2 – Драйвер на транзисторах
Шаговый двигатель подключается к драйверу
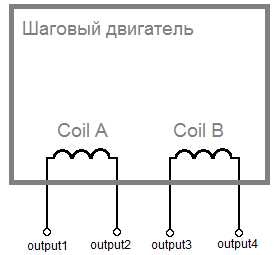
Рисунок 3 – Шаговый двигатель
Для возможности реверса двигателя можно поставить переключатели (или переключатель) так чтобы при переключении менялись местами выводы output1 с output4 и output2 с output3 например:
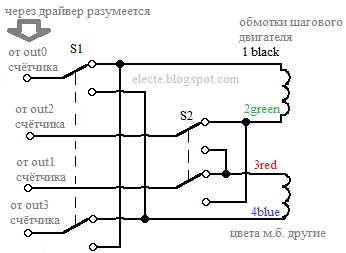
Рисунок 4 – Реверс шагового двигателя
Просто контроллер:
Весь привод:
Купить микросхему счётчик CD4022 dip корпус (как на видео выше) 5шт.
Таймер NE555 dip корпус 5шт.
КАРТА БЛОГА (содержание)
electe.blogspot.com
