
Классификация электродвигателей
Электрический двигатель или электромеханический преобразователь – это машина вращательного типа, преобразующая электрическую энергию в механическую. Образование и выделение тепла – побочный эффект работы электродвигателя.
Вращающий момент в электродвигателе может создаваться при перемагничивании ротора вследствие гистерезиса, либо при взаимодействии магнитных полей статора и ротора, возникающих в них при подаче тока. Электродвигатели первой группы называют гистерезисными, применяют очень редко. Основная масса двигателей, используемых в промышленности, относится к группе магнитоэлектрических.
- Трехфазный асинхронный электродвигатель
- Линейные электродвигатели
- Электродвигатель постоянного тока
- Устройство шагового двигателя
- Устройство сервомотора
 Существует также немногочисленная группа универсальных двигателей, которые питаются обоими видами тока.
Существует также немногочисленная группа универсальных двигателей, которые питаются обоими видами тока.Двигатели постоянного тока
По наличию щёточно-коллекторного узла двигатели постоянного тока делят на коллекторные и бесколлекторные. Щёточно-коллекторный узел предусмотрен для электрического соединения цепей статора и ротора. Этот узел электродвигателя является наиболее уязвимым, сложным в ремонте и обслуживании.
Внутри группы коллекторных двигателей существует деление на двигатели с самовозбуждением и независимым возбуждением от постоянных магнитов и электромагнитов.
В зависимости от особенностей взаимного подключения обмоток якоря и возбуждения внутри группы двигателей с самовозбуждением различают двигатели параллельного, последовательного и смешанного возбуждения.
Бесколлекторные
или вентильные двигатели работают по тому же прицепу, что и синхронные двигатели постоянного тока. Представляют собой замкнутые системы, включающие силовой полупроводниковый преобразователь, преобразователь координат, датчик положения ротора.
Электродвигатели переменного тока
Двигатели переменного тока питаются от сетей переменного тока и подразделяются на синхронные и асинхронные.
В синхронных электродвигателях скорости вращения ротора и движения первой гармоники магнитодвижущей силы статора совпадают. Этот тип двигателей применяется при высоких мощностях.
К группе синхронных двигателей относят вентильные реактивные и шаговые электродвигатели. Питание обмоток вентильных реактивных двигателей формируется с помощью полупроводниковых элементов. Отличительная особенность шаговых электродвигателей – дискретное (шаговое) угловое перемещение ротора при работе. Последовательное перемещение ротора происходит при переключении напряжения питания с одних обмоток на другие.
Наибольшее распространение в современной промышленности получили асинхронные электродвигатели. Частоты вращающего магнитного поля, создаваемого напряжением питания и вращения ротора в двигателях асинхронного типа всегда разнятся.
Двигатели переменного тока различаются по количеству фаз. По этому признаку выделяют одно-, двух-, трех- и многофазные двигатели. Однофазные двигатели могут иметь фазосдвигающую цепь, либо пусковую обмотку, либо запускаться вручную.
В электроинструментах и бытовых приборах применяются коллекторные универсальные электродвигатели, которые могут работать от источников постоянного и переменного тока. Универсальные двигатели производятся только с последовательными обмотками возбуждения, которые при подаче постоянного тока включаются полностью, а при подаче переменного – частично.
Классификация электродвигателей
В зависимости от назначения, от предполагаемых режимов и условий работы, от типа питания и т. д., все электродвигатели можно классифицировать по нескольким параметрам: по принципу получения рабочего момента, по способу работы, по роду тока питания, по способу управления фазами, по типу возбуждения и т. д. Давайте же рассмотрим классификацию электродвигателей более подробно.
Возникновение вращающего момента
Вращающий момент в электродвигателях может быть получен одним из двух способов: по принципу магнитного гистерезиса либо чисто магнитоэлектрически. Гистерезисный двигатель получает вращающий момент посредством явления гистерезиса во время перемагничивания магнитно-твердого ротора, в то время как у магнитоэлектрического двигателя вращающий момент является результатом взаимодействия явных магнитных полюсов ротора и статора.
Магнитоэлектрические двигатели по праву составляют сегодня львиную долю всего обилия электродвигателей, применяемых в очень многих областях. Они подразделяются по роду питающего тока на: двигатели постоянного тока, двигатели переменного тока и универсальные двигатели.
В отличие от магнитоэлектрического двигателя, в гистерезисном двигателе допускается перемещение намагниченности ротора относительно его геометрических осей, и именно данная особенность не позволяет распространять на синхронный режим работы гистерезисного двигателя общие закономерности магнитоэлектрического преобразования.
Двигатели постоянного тока
У двигателя, который питается постоянным током, за переключение фаз отвечает сам двигатель. Это значит, что хотя на электрическую машину и подается постоянный ток, тем не менее, благодаря действию внутренних механизмов устройства, магнитное поле оказывается движущимся и становится в состоянии поддерживать вращающий момент ротора (как будто в обмотке статора действует переменный ток).
По способу создания движущегося магнитного поля, двигатели постоянного тока подразделяются на вентильные (бесколлекторные) и коллекторные. Бесколлекторные двигатели имеют в своей конструкции электронные инверторы, которые и осуществляют переключение фаз. Коллекторные же двигатели традиционно оснащены щеточно-коллекторными узлами, которые призваны чисто механически синхронизировать питание обмоток двигателя с вращением его движущихся частей.
Возбуждение коллекторных двигателей
Коллекторные двигатели по способу возбуждения бывают следующих видов: с независимым возбуждением от постоянных магнитов или от электромагнитов, либо с самовозбуждением.
Двигатель пульсирующего тока
На двигатель постоянного тока похож двигатель пульсирующего тока. Отличие заключается в наличии шихтованных вставок на остове, а также дополнительных шихтованных полюсов. Кроме того, у двигателя пульсирующего тока имеется компенсационная обмотка. Применение такие двигатели находит в электровозах, где они обычно питается выпрямленным переменным током.
Двигатель переменного тока
Двигатели переменного тока, как ясно из названия, питаются током переменным. Бывают они синхронными и асинхронными.
У синхронных двигателей переменного тока магнитное поле статора движется с той же угловой скоростью, что и ротор, а у асинхронных всегда есть некое отставание (характеризующееся величиной скольжения s) — магнитное поле статора в своем движении как бы опережает ротор, который в свою очередь все время стремится его догнать.
Синхронные двигатели больших мощностей (мощностью в сотни киловатт) имеют на роторе обмотки возбуждения. Роторы менее мощных синхронных двигателей оснащены постоянными магнитами, которые и образуют полюса. Гистерезисные двигатели тоже в принципе относятся к синхронным.
Шаговые двигатели — это особая категория синхронных двигателей с высокой точностью управления скоростью вращения, вплоть до дискретного счета шагов.
Вентильные синхронные реактивные двигатели получают питание через инвертор. Смотрите по этой теме: Современные синхронные реактивные двигатели
Асинхронные двигатели переменного тока отличаются тем, что у них угловая скорость вращения ротора всегда меньше чем угловая скорость вращения магнитного поля статора. Асинхронные двигатели бывают однофазными (с пусковой обмоткой), двухфазными (к ним относится и конденсаторный двигатель), трехфазными и многофазными.
ЭлектроВести (elektrovesti.net) – новости мировой энергетики и возобновляемой энергетики Украины
Классификация электродвигателей ~ Электрические ноу-хау
В предыдущей теме» Электрика
Основные компоненты двигателей « , я объяснил конструкцию и основные компоненты основных типов двигателей двигателей; Двигатели переменного и постоянного тока.
Сегодня я объясню различные типы электродвигателей в мире следующим образом.
Основные типы двигателей
Электродвигатели в целом подразделяются на две следующие категории:
- Двигатели переменного тока.
- Двигатели постоянного тока.
Внутри этих двух основных категорий есть подразделения, как показано на изображении ниже.
Типы двигателей
Примечания: В последнее время, с развитием экономичных и надежных силовых электронных компонентов, появилось множество способов проектирования двигателя, и классификации этих двигателей стали менее строгими, и появилось много других типов двигателей. Наша классификация двигателей будет максимально полной.
Первый: двигатели постоянного тока
| двигатели постоянного тока |
Системы питания постоянного тока не очень распространены в современной инженерной практике.
Преимущества двигателей постоянного тока:
- Их скорость легко регулировать в широком диапазоне; исторически сложилось, что их характеристика крутящий момент-скорость настраивается легче, чем у всех категорий двигателей переменного тока. Вот почему большинство тяговых и серводвигателей были машинами постоянного тока. Например, двигатели для привода рельсовых транспортных средств до недавнего времени были исключительно машинами постоянного тока.
- Их уменьшенные габаритные размеры позволяют значительно сэкономить пространство, что позволяет производителям машин или установок не зависеть от преувеличенных размеров круглых двигателей.

Недостатки двигателей постоянного тока
- Так как им нужны щетки для соединения обмотки ротора. Происходит износ щеток, и он резко возрастает в условиях низкого давления. Поэтому их нельзя использовать в искусственных сердцах. При использовании в самолете щетки потребуют замены через один час работы.
- Искры от щеток могут привести к взрыву, если окружающая среда содержит взрывоопасные материалы.
- Радиочастотный шум от щеток может мешать расположенным поблизости телевизорам, электронным устройствам и т. д. Двигатели постоянного тока
- также дороже двигателей переменного тока.
Таким образом, во всех применениях двигателей постоянного тока используется механический переключатель или коммутатор для преобразования тока на клеммах, который является постоянным или постоянным, в переменный ток в якоре машины. Поэтому машины постоянного тока также называют коммутационными машинами.
Типы двигателей постоянного тока:
| Типы двигателей постоянного тока |
Двигатели постоянного тока делятся в основном на:
- Щеточные двигатели постоянного тока (BDC).
- Бесщеточные двигатели постоянного тока (BLDC).
1. A Щеточные двигатели постоянного тока
| Щеточные двигатели постоянного тока |
Коллекторный двигатель постоянного тока (BDC) представляет собой электродвигатель с внутренней коммутацией, предназначенный для работы от источника питания постоянного тока.
Области применения:
Коллекторные двигатели постоянного тока широко используются в самых разных областях: от игрушек до регулируемых с помощью кнопок автомобильных сидений.
Преимущества:
Моторы с матовой товнера Двигатель постоянного тока Конструкция
Все двигатели BDC состоят из одних и тех же основных компонентов: статора, ротора, щеток и коллектора.
1- Статор
Статор создает стационарное магнитное поле, окружающее ротор. Это поле создается либо постоянными магнитами, либо электромагнитными обмотками.
2- Ротор
| Ротор (якорь) | 9005
 Это переключение поля в обмотках ротора называется коммутацией.
Это переключение поля в обмотках ротора называется коммутацией.3- Brushes and Commutator
|
Сегменты и щетки
В отличие от других типов электродвигателей (т. е. бесщеточных двигателей постоянного тока, асинхронных двигателей переменного тока), для двигателей BDC не требуется контроллер для переключения тока в обмотках двигателя. Вместо этого коммутация обмоток двигателя BDC выполняется механически.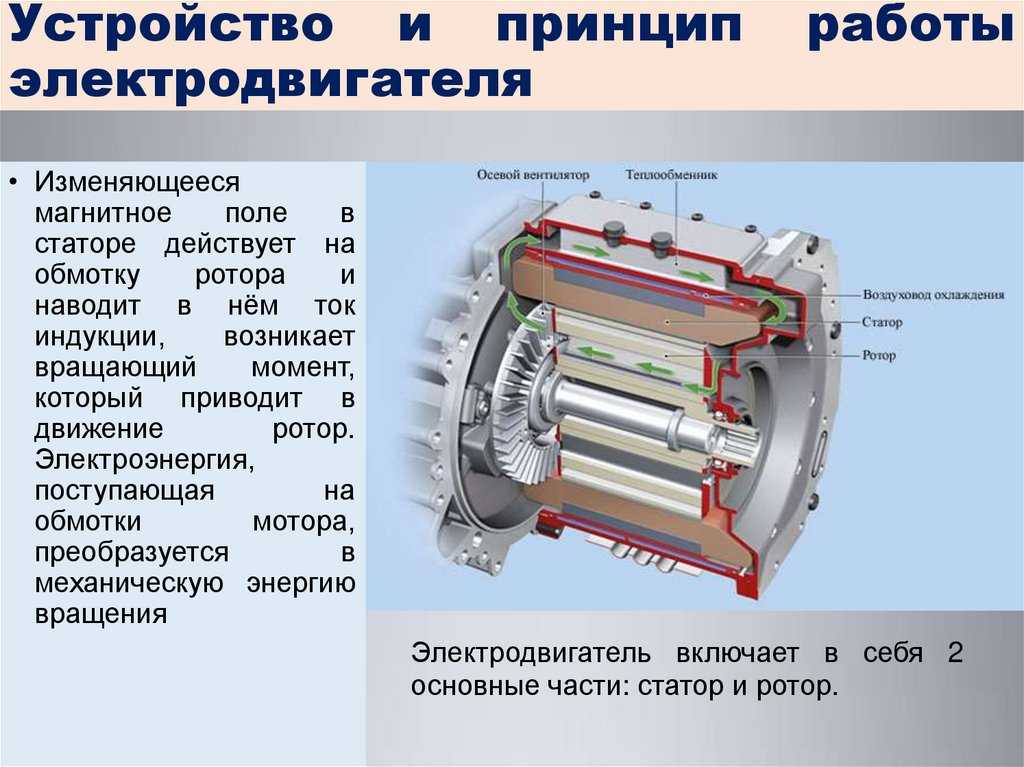 Сегментированная медная втулка, называемая коммутатором, находится на оси двигателя BDC. Когда двигатель вращается, угольные щетки (движущиеся сбоку от коммутатора для подачи напряжения питания на двигатель) скользят по коммутатору, соприкасаясь с различными сегментами коммутатора. Сегменты прикреплены к разным обмоткам ротора, поэтому внутри двигателя создается динамическое магнитное поле при подаче напряжения на щетки двигателя. Важно отметить, что щетки и коллектор являются частями двигателя BDC, которые наиболее подвержены износу, поскольку они скользят относительно друг друга.
Сегментированная медная втулка, называемая коммутатором, находится на оси двигателя BDC. Когда двигатель вращается, угольные щетки (движущиеся сбоку от коммутатора для подачи напряжения питания на двигатель) скользят по коммутатору, соприкасаясь с различными сегментами коммутатора. Сегменты прикреплены к разным обмоткам ротора, поэтому внутри двигателя создается динамическое магнитное поле при подаче напряжения на щетки двигателя. Важно отметить, что щетки и коллектор являются частями двигателя BDC, которые наиболее подвержены износу, поскольку они скользят относительно друг друга.
Принцип работы коммутатора:
Принцип работы коммутатора |
Когда ротор вращается, клеммы коммутатора также поворачиваются и постоянно меняют полярность тока, который он получает от неподвижных щеток, прикрепленных к батарее.
Типы двигателей BDC:
| Типы двигателей постоянного тока |
Различные типы двигателей BDC отличаются конструкцией статора или способом подключения электромагнитных обмоток к источнику питания. Эти типы:
- Постоянный магнит.
- Шунтовая рана. Серия
- -рана.
- Составная рана.
- Двигатель постоянного тока с независимым возбуждением.
- Универсальный двигатель.
- Серводвигатели.
A- Permanent Magnet
| Permanent Magnet Motor |
A permanent magnet DC (PMDC) motor is a motor whose полюса сделаны из постоянных магнитов для создания поля статора.
Преимущества:
- Поскольку внешняя цепь возбуждения не требуется, отсутствуют потери в меди цепи возбуждения.
- Поскольку обмотки возбуждения не требуются, эти двигатели могут быть значительно меньше.
- Широко используется в приложениях с низким энергопотреблением.
- Обмотка возбуждения заменена на постоянный магнит (простая конструкция и меньше места).
- Нет требований к внешнему возбуждению.
Недостатки:
- Поскольку постоянные магниты создают меньшую плотность магнитного потока, чем внешние шунтирующие поля, такие двигатели имеют меньший индуктивный крутящий момент.
- Всегда существует риск размагничивания из-за сильного нагрева или реакции якоря (некоторые двигатели с постоянным током имеют встроенную обмотку, чтобы предотвратить это).
B- Шунт-ваунд
| Shunt Wound Motor |
Shunt Wound Motor Dc (Shwdc). арматура.
арматура.
Скорость практически постоянна и не зависит от нагрузки, поэтому подходит для коммерческих применений с низкой начальной нагрузкой, таких как центробежные насосы, станки, воздуходувки, поршневые насосы и т. д.
Преимущества:
- Ток в катушке возбуждения и якоре не зависят друг от друга. в результате эти двигатели имеют отличный контроль скорости.
- Потеря магнетизма не является проблемой для двигателей SHWDC, поэтому они, как правило, более надежны, чем двигатели PMDC.
- Скоростью можно управлять либо путем включения сопротивления последовательно с якорем (уменьшение скорости), либо путем включения сопротивления в ток возбуждения (увеличение скорости).
Недостатки:
- Коллекторные двигатели постоянного тока с параллельной обмоткой (SHWDC) имеют недостатки при реверсивном применении, поскольку направление обмотки относительно параллельной обмотки должно быть изменено на противоположное при изменении напряжения якоря.
 Здесь необходимо использовать реверсивные контакторы.
Здесь необходимо использовать реверсивные контакторы.
Двигатель серии C
| Двигатель серии C |
Коллекторные двигатели постоянного тока с последовательной обмоткой (SWDC) имеют обмотку возбуждения, включенную последовательно с якорем. Эти двигатели идеально подходят для приложений с высоким крутящим моментом, таких как тяговые транспортные средства (краны и подъемники, электропоезда, конвейеры, лифты, электромобили), поскольку ток как в статоре, так и в якоре увеличивается под нагрузкой.
Преимущества:
- Крутящий момент пропорционален I2, поэтому он обеспечивает самое высокое отношение крутящего момента к току по сравнению со всеми другими двигателями постоянного тока.
Недостатки:
- Недостатком двигателей SWDC является то, что они не имеют точного контроля скорости, как двигатели PMDC и SHWDC.

- Скорость ограничена 5000 об/мин.
- Следует избегать запуска последовательного двигателя без нагрузки, поскольку двигатель будет неконтролируемо ускоряться.
D- Двигатель с комбинированной обмоткой
| Двигатель с комбинированной обмоткой |
Двигатели с комбинированной обмоткой (CWDC) представляют собой комбинацию двигателей с параллельной и последовательной обмоткой.
В двигателях CWDC используется как последовательное, так и шунтирующее поле. Производительность двигателя CWDC представляет собой комбинацию двигателей SWDC и SHWDC. Двигатели CWDC имеют более высокий крутящий момент, чем двигатели SHWDC, и обеспечивают лучшее управление скоростью, чем двигатели SWDC.
Используется в таких областях, как прокатные станы, внезапные временные нагрузки, тяжелые станки, штампы и т. д.
д.
Преимущества:
- Этот двигатель имеет хороший пусковой момент и стабильную скорость.
Недостатки:
- Скорость холостого хода регулируется, в отличие от серийных двигателей.
E- Отдельно возбужденный DC Motor
| Отдельно возбужденные DC Motor |
В разделенном DC Motor Motor. двигатель-генератор, и на ток возбуждения не влияют изменения тока якоря. Двигатель постоянного тока с независимым возбуждением иногда использовался в тяговых двигателях постоянного тока для облегчения контроля проскальзывания колес.
F- Universal Motor
| Universal Motor |
Ибо hopating Electric источник. Обмотки статора и ротора двигателя соединены последовательно через коммутатор ротора. Серийный двигатель предназначен для перемещения больших грузов с высоким крутящим моментом в таких приложениях, как двигатель крана или подъемный подъемник.
Обмотки статора и ротора двигателя соединены последовательно через коммутатор ротора. Серийный двигатель предназначен для перемещения больших грузов с высоким крутящим моментом в таких приложениях, как двигатель крана или подъемный подъемник.
G- Servo Motors
| Servo Motors |
Servo Motors. в указанное положение. Серводвигатели предназначены для приложений, включающих управление положением, регулирование скорости и управление крутящим моментом.
|
Серводвигатель в основном состоит из двигателя постоянного тока, редуктора, датчика положения, который в основном представляет собой потенциометр, и управляющей электроники.
|
В следующей теме.0005 . Так что, пожалуйста, продолжайте следить.
Примечание: эти темы о двигателях в этом курсе EE-1: курс проектирования электрооборудования для начинающих предназначен только для начинающих, чтобы узнать общую базовую информацию о двигателях и насосах как типе силовых нагрузок. Но на других уровнях наших курсов по проектированию электрооборудования мы покажем и подробно объясним расчеты нагрузки двигателя и насоса.
Классификация двигателей
Электродвигатель — это устройство, которое преобразует электрическую энергию в кинетическую (т. е. в движение).
Большинство двигателей, описанных в этом руководстве, вращаются вокруг оси, но есть и специальные двигатели, которые перемещаются линейно. Все двигатели работают либо на переменном токе (AC), либо на постоянном токе (DC), но некоторые могут работать в обоих режимах (см. рис. 2-1). Ниже перечислены наиболее распространенные двигатели, используемые сегодня. Каждый тип двигателя имеет уникальные характеристики, которые делают его пригодным для конкретных применений.
Все двигатели работают либо на переменном токе (AC), либо на постоянном токе (DC), но некоторые могут работать в обоих режимах (см. рис. 2-1). Ниже перечислены наиболее распространенные двигатели, используемые сегодня. Каждый тип двигателя имеет уникальные характеристики, которые делают его пригодным для конкретных применений.
Рисунок 2-1: Семейное дерево двигателей
Текстовая версия — Рисунок 2-1- Двигатели переменного тока (AC)
- Асинхронный
- 3 фазы
- Беличья клетка
- Ротор с обмоткой
- Однофазный
- Постоянный разделительный конденсатор
- Разделенная фаза
- Пусковой конденсатор
- Заштрихованная стойка
- Работа конденсатора
- Переменное сопротивление
- 3 фазы
- AC Матовый
- Универсальный
- Синхронный
- Синусоида
- Ротор с обмоткой
- Ротор БДМ
- Синхронный конденсатор
- Шаговый двигатель
- Переменное сопротивление
- вечера
- Гибрид
- Бесщеточный
- Нежелание
- Синхронное сопротивление
- Переключаемое сопротивление
- Синусоида
- Асинхронный
- Двигатели постоянного тока
- Универсальный
- Бесщеточный
- Соединение
- Шунт
- Серия
Двигатели переменного тока (AC)
Двигатели переменного тока включают трехфазные и однофазные двигатели.
Трехфазные асинхронные двигатели переменного тока наиболее широко используются в промышленных и коммерческих целях. Они делятся на две подкатегории:
- Электродвигатели с короткозамкнутым ротором
- Двигатели с фазным ротором
3-фазные синхронные двигатели чаще всего используются в очень крупных промышленных приложениях или там, где требуется точная скорость.
Однофазные асинхронные двигатели используются там, где недоступно трехфазное питание; как правило, в жилых, коммерческих и сельскохозяйственных приложениях. Они также используются в устройствах с потребляемой мощностью менее 1 лошадиной силы (л.с.). Основные подкатегории включают:
- Разделенная фаза
- Работа конденсатора
- Конденсатор пусковой
- Пуск конденсатора – запуск конденсатора
- Заштрихованная стойка
- Универсальные двигатели
Универсальные двигатели в основном работают от сети переменного тока, но они могут работать как от сети переменного тока , так и от сети постоянного тока .
