
Широтно импульсная модуляция сигналов (ШИМ)
Широтно-импульсная модуляция сигналов (сокращенно ШИМ) — процесс представления сигнала в виде череды импульсов с постоянной частотой и управления уровнем этого сигнала путём изменения скважности данных импульсов. В английском варианте ШИМ имеет название pulse-width modulation (PWM)
Определение звучит сложно, но на самом деле все очень просто. Достаточно понять, что такое скважность и среднее результирующее напряжение. Самый простой способ разобраться в понятии скважности и представить, что такое ШИМ, — это рассмотреть участок цепи, который находится под постоянным напряжением Uп, в результате чего в цепи течет постоянный ток Iп. Временная диаграмма такой ситуации представлена на рисунке 1.
Рисунок 1
Из диаграммы видно, что напряжение остается постоянным во времени. Теперь представьте, что это постоянное напряжение Uп мы начинаем равномерно включать-выключать с высокой частотой, например 2000 раз в секунду.
Рисунок 2
Оказывается, что в этом случае набор импульсов воспринимается потребителем тока (каким либо устройством) как постоянное напряжение, но с другим (результирующим) уровнем напряжения Uрез. Это справедливо только при достаточно большой частоте импульсов. Чтобы оценить, как это результирующее напряжение отличается от постоянного, необходимо сравнить количество заряженных частиц, протекающих по проводнику за период импульсного колебания (время импульса + время паузы), с количеством заряда протекающего при постоянном напряжении за то же время.
После математических вычислений получим формулу: Uрез = (Uи·tи) / T ,
где Uи – напряжение импульса; tи – время длительности импульса; Т – период одного импульсного колебания (сумма времени импульса и времени паузы).
Таким образом, для случая, изображенного на рис. 2, когда продолжительность импульса равна времени паузы между импульсами (то есть Т=2·tи) , результирующее напряжение получится: Uрез = (Uи·tи)/2·tи = 0,5 Uи. Результирующее напряжение получилось в два раза меньше напряжения импульса. При этом важно отметить, что в теории выделяются такие коэффициенты, как скважность – S = T / tи и обратный ему коэффициент заполнения – D = tи / T . Он, как правило, выражается в процентах.
2, когда продолжительность импульса равна времени паузы между импульсами (то есть Т=2·tи) , результирующее напряжение получится: Uрез = (Uи·tи)/2·tи = 0,5 Uи. Результирующее напряжение получилось в два раза меньше напряжения импульса. При этом важно отметить, что в теории выделяются такие коэффициенты, как скважность – S = T / tи и обратный ему коэффициент заполнения – D = tи / T . Он, как правило, выражается в процентах.
Фактически коэффициент заполнения показывает, на сколько процентов импульс заполняет весь период колебания Т. Если коэффициент заполнения
Рисунок 3
Из всего сказанного следует и более наглядное понимание термина «Широтно-импульсная модуляция». Получается, что уровень сигнала (величина уровня напряжения) регулируется широтой импульса, т.е. сигнал модулируется посредством череды импульсов разной ширины.
Получается, что уровень сигнала (величина уровня напряжения) регулируется широтой импульса, т.е. сигнал модулируется посредством череды импульсов разной ширины.
Как видите, с помощью такой модуляции можно получать напряжения разных уровней. Причем в отличие от банального пропускания тока через резистор с целью уменьшения напряжения метод ШИМ гораздо экономичнее. Если регулировать напряжение резистором, то на нем выделяется тепло и часть электрической энергии теряется. При ШИМ энергии теряется существенно меньше, поэтому данная модуляция активно используется в различных регуляторах напряжения и блоках питания. Принципы импульсной модуляции используются для решения многих других задач.
Сгенерировать собственную ШИМ, а так ж собрать различные интересные схемы с применением устройств управляемых ШИМ, вы сможете в наборах первого уровня Эвольвектор.
Первая миля – научно-технический журнал – Первая миля
Двухканальные ШИМ с селекцией импульсов по длительности применяются в тех случаях, когда к вторичному источнику питания (ВИП) предъявляются высокие требования по КПД при его работе в большом диапазоне нагрузок по току – от максимальной токовой нагрузки (Iн = Imax) до минимальной (Iн = Imin), практически равной холостому ходу (Iхх). При этом большую часть времени ВИП работает при минимальных нагрузках по току.
При этом большую часть времени ВИП работает при минимальных нагрузках по току.Прямоходовые ВИП, в которых ШИМ построен по схеме двойного регулирующего воздействия на наклон пилообразного напряжения (в дальнейшем “пила”), имеют максимальный КПД при минимальном входном напряжении и максимальных нагрузках по току, т.
 е. при Uвх = Uвхmin и Rн = Rнmin. При Rн = Rнmax их КПД снижается. Одна из причин такого снижения заключается в том, что мощность, расходуемая в цепи управления силовыми МДП-транзисторами, слабо зависит от тока нагрузки, т.е. ее можно считать практически постоянной. А поскольку при Rн = Rнmax мощность по выходу снижается, то будет снижаться и КПД источника питания.
е. при Uвх = Uвхmin и Rн = Rнmin. При Rн = Rнmax их КПД снижается. Одна из причин такого снижения заключается в том, что мощность, расходуемая в цепи управления силовыми МДП-транзисторами, слабо зависит от тока нагрузки, т.е. ее можно считать практически постоянной. А поскольку при Rн = Rнmax мощность по выходу снижается, то будет снижаться и КПД источника питания.Один из способов повышения КПД таких ВИП заключается в том, чтобы полностью отказаться от подгрузочных резисторов. Но без них выходное напряжение возрастает, так как обратная связь (ОС) совместно с ШИМ не всегда справляется с задачей получения выходного напряжения в заданных пределах. При холостом ходе конденсатору выходного LC-фильтра не на что разряжаться, а поскольку даже очень короткие по длительности импульсы добавляют энергию в конденсатор фильтра при каждом включении силового ключа, то напряжение будет увеличиваться (ШИМ не 100-процентный). Если создать такой ШИМ, который не пропускал бы короткие импульсы на входы силовых транзисторов, то КПД увеличится, так как силовые транзисторы будут реже включаться.
Двухканальный ШИМ, работающий по принципу исключения импульсов по длительности (селекция импульсов), наиболее просто реализовать по схеме собственно ШИМ плюс распределитель импульсов на два выхода (канала). При этом в качестве собственно ШИМ могут применяться схемы с различными способами фиксации момента совпадения напряжения “пилы” с напряжением порога переключения логического элемента (ЛЭ). В данном случае рассмотрим схему ШИМ, в котором момент совпадения напряжения “пилы” с напряжением порога переключения ЛЭ фиксируется R-S-триггером. Вариант такого ШИМ со схемой селекции импульсов по длительности приведен на рис.
 1. Схема содержит собственно ШИМ (элементы В1, В2, В3, ключи Кл1, Кл2, времязадающая цепь на резисторе R1 и конденсаторе С1), узел селекции импульсов по длительности (УСлИ) и распределитель импульсов на два канала (выхода). Последний выполнен на Д-триггере Тг1, фиксирующем информацию по фронту спада входного сигнала на его тактовом входе “С” и двух вентилях И (вентили В4, В5).
1. Схема содержит собственно ШИМ (элементы В1, В2, В3, ключи Кл1, Кл2, времязадающая цепь на резисторе R1 и конденсаторе С1), узел селекции импульсов по длительности (УСлИ) и распределитель импульсов на два канала (выхода). Последний выполнен на Д-триггере Тг1, фиксирующем информацию по фронту спада входного сигнала на его тактовом входе “С” и двух вентилях И (вентили В4, В5).Рассмотрим работу схемы ШИМ без узла селекции импульсов (УСлИ), когда выход элемента В3 (выход собственно ШИМ) подсоединен к тактовому входу “С” триггера Тг1. На вход схемы поступают импульсы от задающего генератора (импульсы tи.зг). Длительность импульсов tи.зг выбирается исходя из требований к длительности просечки. Если, например, предположить, что длительность периода следования импульсов tи.зг равна 2 мкс (Tи.зг = 2 мкс, fи.зг = 500 кГц), то длительность tи.зг выбирают, как правило, равной 0,1 от Tи.зг, т.е. равной 200 нс. В этом случае коэффициент заполнения Кз составит 0,9 (Кз = Tи.зг – tи.зг/ Tи.зг = 2–0,2/2 = 0,9).

Рассмотрим момент времени, когда на входе схемы ШИМ импульсы tи.зг отсутствуют, т.е. на входе схемы действует сигнал с уровнем логического 0 (лог. 0). В этом случае имеет место следующее распределение логических уровней на выходах вентилей схемы ШИМ: В1 = 1, В2 = В3 = 0. Следовательно, на выходах ШИМ действуют сигналы с уровнем лог. 0 (В4 = В5 = 0), которые поступают на затворы силовых ключей, удерживая их в закрытом состоянии. Конденсатор С1 будет разряжен через ключ Кл2, поскольку на управляющем входе (У) этого ключа действует сигнал с уровнем лог.
 1 (В1 = У = 1). При поступлении на вход схемы ШИМ импульса tи.зг (см. рис.1) на выходе элемента В1 сформируется уровень лог. 0 (В1 = 0), а на выходе элемента В2 – уровень лог. 1 (В2 = 1). При этом, во-первых, откроется ключ Кл1, т.е. появится дополнительная цепь для разряда конденсатора С1, который, как было сказано выше, уже был разряжен через ключ Кл2 (в качестве ключей Кл1 и Кл2 могут использоваться либо полевой транзистор, либо двунаправленный ключ типа КТ3). Во-вторых, на выходах вентилей В4, В5 будут действовать сигналы с уровнем лог. 0 (В4 = В5 = 0), за счет сигнала В3 = 0. То есть во время действия импульса tи.зг осуществляется запрет на передачу информации с выходов триггера Тг1 на входы затворов силовых ключей. По окончании действия импульса tи.зг на выходе элемента В3 сформируется лог. 1, и только на одном из выходов вентилей В4, В5 сформируется рабочий сигнал с уровнем лог. 1. Сразу после окончания импульса tи.зг начнется заряд конденсатора С1 по цепи R1, C1. Как только напряжение на конденсаторе С1 достигнет напряжения порога переключения элемента В2 (Uп.
1 (В1 = У = 1). При поступлении на вход схемы ШИМ импульса tи.зг (см. рис.1) на выходе элемента В1 сформируется уровень лог. 0 (В1 = 0), а на выходе элемента В2 – уровень лог. 1 (В2 = 1). При этом, во-первых, откроется ключ Кл1, т.е. появится дополнительная цепь для разряда конденсатора С1, который, как было сказано выше, уже был разряжен через ключ Кл2 (в качестве ключей Кл1 и Кл2 могут использоваться либо полевой транзистор, либо двунаправленный ключ типа КТ3). Во-вторых, на выходах вентилей В4, В5 будут действовать сигналы с уровнем лог. 0 (В4 = В5 = 0), за счет сигнала В3 = 0. То есть во время действия импульса tи.зг осуществляется запрет на передачу информации с выходов триггера Тг1 на входы затворов силовых ключей. По окончании действия импульса tи.зг на выходе элемента В3 сформируется лог. 1, и только на одном из выходов вентилей В4, В5 сформируется рабочий сигнал с уровнем лог. 1. Сразу после окончания импульса tи.зг начнется заряд конденсатора С1 по цепи R1, C1. Как только напряжение на конденсаторе С1 достигнет напряжения порога переключения элемента В2 (Uп.
Tи.ш. = (R1 x C1 x Uп.пер)/Uвх. (1)
То есть чем меньше Uвх, тем больше длительность импульса и, наоборот, чем больше Uвх, тем длительность импульса меньше.
С учетом действия ОС эта длительность изменяется в соответствии с выражением [3]:
tи.ш. = (R1 x C1) [Uп.пер/(Uвх + IVD1.2 x Кi x R1)]. (2)
Другими словами, триггер Тг1 по входу “С” управляется сигналами изменяемой длительности, которые при холостом ходе могут иметь длительность заметно меньшую, чем длительность импульса tи.зг. В результате триггер Тг1 по входу “С” может просто не сработать ввиду того, что входной импульс недостаточен по длительности для его переключения.
 И здесь приходит на помощь схема УСлИ. Задача узла – пропустить на вход триггера Тг1 импульсы, длительность tи.ш. которых больше длительности tи.тг1 импульса, необходимого для срабатывания триггера, т.е. должно выполняться условие tи.ш. ≥ tи.тг1.
И здесь приходит на помощь схема УСлИ. Задача узла – пропустить на вход триггера Тг1 импульсы, длительность tи.ш. которых больше длительности tи.тг1 импульса, необходимого для срабатывания триггера, т.е. должно выполняться условие tи.ш. ≥ tи.тг1.Импульсы, которые не поступают на вход триггера Тг1, не поступают и на затворы силовых транзисторов. Следовательно, последние не переключаются, т.е. не тратится энергия на их включение и последующую работу, что и приводит к повышению КПД источника питания при малых токовых нагрузках и в режиме холостого хода. При холостом ходе напряжение на выходе ВИП возрастает (дроссель LC работает в режиме разрывного тока), и при отсутствии сигнала ОС достигает значения
Uвых = Uвх.ф х Ктр, (3)
где Ктр – коэффициент трансформации силового трансформатора; Uвх.ф – амплитудное значение напряжения на входе LC-фильтра. Если предположить, что Ктр = 1/3 (Ктр = W2/W1, где W1, W2 – число витков первичной и вторичной обмоток трансформатора соответственно), то при Uвх.
 max = 36 В напряжение на конденсаторе (нагрузке) сглаживающего LC-фильтра составит 12 В (36/3 = 12, без учета падения напряжения на выпрямительных диодах и других потерь). При заданном выходном напряжении 5 В (Uвых = 5 В) разность между заданным выходным напряжением и напряжением на выходе LC-фильтра составляет 7 В. И эта разность напряжений должна быть отработана обратной связью совместно с ШИМ изменением коэффициента заполнения Кз, что достаточно сложно без установки подгрузочных резисторов. При еще большем входном напряжении эта разность возрастет еще заметнее – и теперь уже точно без подгрузочных резисторов не обойтись.
max = 36 В напряжение на конденсаторе (нагрузке) сглаживающего LC-фильтра составит 12 В (36/3 = 12, без учета падения напряжения на выпрямительных диодах и других потерь). При заданном выходном напряжении 5 В (Uвых = 5 В) разность между заданным выходным напряжением и напряжением на выходе LC-фильтра составляет 7 В. И эта разность напряжений должна быть отработана обратной связью совместно с ШИМ изменением коэффициента заполнения Кз, что достаточно сложно без установки подгрузочных резисторов. При еще большем входном напряжении эта разность возрастет еще заметнее – и теперь уже точно без подгрузочных резисторов не обойтись.Осуществляя пропуск импульсов, мы тем самым снижаем выходное напряжение на LC-фильтре (Uвых) и уменьшаем разность напряжений между заданным напряжением и напряжением на выходе LC-фильтра, т.е. мы как бы искусственно снижаем коэффициент заполнения Кз. И, следовательно, в соответствии с выражением (3) уменьшаем выходное напряжение.
Схемотехнический прием повышения КПД источников питания, которые работают при малых токах потребления, за счет пропуска импульсов может оказаться весьма полезным для ВИП, построенных из преобразователя напряжения (обычно – источника питания без элементов стабилизации выходного напряжения, т.
 е., например, без ОС) плюс линейный стабилизатор (ЛС). Однако последнее возможно при условии, что в схемной реализации ЛС имеется элемент обратной связи с гальванической развязкой, например, в виде диодной или транзисторной оптопары с возможностью управлять длительностью импульса, который формируется ШИМ от тока нагрузки, аналогично схеме, приведенной на рис.1.
е., например, без ОС) плюс линейный стабилизатор (ЛС). Однако последнее возможно при условии, что в схемной реализации ЛС имеется элемент обратной связи с гальванической развязкой, например, в виде диодной или транзисторной оптопары с возможностью управлять длительностью импульса, который формируется ШИМ от тока нагрузки, аналогично схеме, приведенной на рис.1.Известно, что ВИП, содержащие ЛС на выходе, позволяют получать наиболее качественное вторичное питание (высокая стабильность, малые пульсации, отсутствие выбросов и провалов при резких сбросах и набросах нагрузки по току). Такие источники достаточно широко применяются при небольших мощностях и токах нагрузки не более 2 А. Поскольку в традиционных источниках, построенных по схеме с линейным стабилизатором, отсутствует ОС, то уменьшение длительности импульса, формируемого схемой ШИМ, может осуществляться только за счет входного возмущающего воздействия. Следовательно, коэффициент заполнения в таких ВИП не может изменяться более, чем в два раза, поскольку их функционирование осуществляется в соответствии с уравнением [1]:
Uвх Ч tи.
 ш. = const. (4)
ш. = const. (4)Необходимо отметить, что ЛС держат холостой ход. А это означает, что в режиме холостого хода разность напряжений на входе ЛС (выход LC-фильтра) и на его выходе будет максимальной. В приведенном выше примере она составила 7 В.
Известно, что КПД линейных стабилизаторов оценивается выражением:
КПД ≈ Uвых/Uвх. (5)
И, значит, для рассмотренного выше случая он составит 5/12 = 42%, т.е. это невысокий КПД. Но в этом выражении не учитываются потери в токозадающем резисторе, который должен втекать в опорный элемент (например, стабилитрон), а они в данном случае будут достаточно высокими. Если учесть эти потери, КПД будет еще меньше. Следовательно, для повышения КПД линейного стабилизатора необходимо снижать напряжение на входе ЛС, не забывая при этом, что регулирующий транзистор должен работать в активном режиме. Именно пропуск импульсов позволяет это сделать и тем самым поднять КПД линейного стабилизатора при его работе в режимах близких к холостому ходу.
На рис.2 приведена схема узла селекции импульсов (УСлИ), позволяющая осуществлять пропуск импульсов, длительность которых меньше некоторой заданной величины. В конкретной разработке импульсы на резистор R1 поступают с выхода коллектора транзистора, нагрузкой которого является резистор номиналом 1 кОм (выход открытого коллектора компаратора 521СА3). Например, если R1 = 10 кОм, R2 = 100 кОм, С1 = 22 пФ, В1 – элемент ПУ (преобразователь уровней) серии 564, то схема пропускает импульсы, длительность которых ≥ 220 нс, т.е. импульсы, длительность которых на клемме Uвх меньше 220 нс, на выходе отсутствуют.
Короткие импульсы не могут пройти на выход схемы по той причине, что они просто не успевают зарядить конденсатор С1 и входную емкость элемента ПУ до его напряжения порога переключения, который при напряжении питания элемента, равном 5 В, составляет примерно 2,5 В. Для сигналов большей длительности такой проблемы не существует, поэтому они будут проходить на выход, не уменьшаясь по длительности.
Схема, приведенная на рис.2, относится к разряду времязадающих, поэтому номиналы элементов, входящих в ее состав, должны быть стабильными, т.е. они по возможности не должны зависеть от дестабилизирующих факторов (частота, напряжение, температура, старение) [1].
Заключение
Применение расмотренной в статье схемы ШИМ наиболее эффективно в тех случаях, когда требуется организовать пропуск импульсов с целью повышения КПД источника питания при его работе в режимах малых токов потребления, близких к режиму холостого хода. В описанной разработке импульсы на резистор R1 поступают с выхода коллектора транзистора, в нагрузке которого установлен резистор номиналом 1 кОм (выход открытого коллектора компаратора 521СА3).
ЛИТЕРАТУРА
1. Горячев В., Чуприн А. Проектирование источника вторичного электропитания с аналого-цифровой СБИС ШИМ-контроллера // Первая миля. 2015. № 7. С. 54–60.
2. Горячев В., Чуприн А. Двухканальный ШИМ в базисе элементов ИЛИ-НЕ // Первая миля. 2017. № 5. С. 64–71.
№ 5. С. 64–71.
3. Горячев В., Чуприн А. Узел внутреннего напряжения питания в бортовых ВИП // Первая миля. 2016. № 4. С. 50–57.
4. Горячев В., Чуприн А. Широтно–импульсный модулятор на цифровых логических элементах // Первая миля. 2017. № 1. С. 68–75.
Широтно-импульсная модуляция (ШИМ). Аналоговая и цифровая
Принцип ШИМ – широтно-импульсная модуляция заключается в изменении ширины импульса при постоянстве частоты следования импульса. Амплитуда импульсов при этом неизменна.
Широтно-импульсное регулирование находит применение там, где требуется регулировать подаваемую к нагрузке мощность. Например, в схемах управления электродвигателями постоянного тока, в импульсных преобразователях, для регулирования яркости светодиодных светильников, экранов ЖК-мониторов, дисплеев в смартфонах и планшетах и т.п.
Большинство вторичных источников питания электронных устройств в настоящее время строятся на основе импульсных преобразователей, применяется широтно-импульсная модуляция и в усилителях низкой (звуковой) частоты класса D, сварочных аппаратах, устройствах зарядки автомобильных аккумуляторов, инверторах и пр. ШИМ позволяет повысить коэффициент полезного действия (КПД) вторичных источников питания в сравнении с низким КПД аналоговых устройств.
ШИМ позволяет повысить коэффициент полезного действия (КПД) вторичных источников питания в сравнении с низким КПД аналоговых устройств.
Широтно-импульсная модуляция бывает аналоговой и цифровой.
Аналоговая широтно-импульсная модуляция
Как уже упоминалось выше, частота сигнала и его амплитуда при ШИМ всегда постоянны. Один из важнейших параметров сигнала ШИМ – это коэффициент заполнения, равный отношению длительности импульса t к периоду импульса T. D = t/T. Так, если имеем сигнал ШИМ с длительностью импульса 300 мкс и периодом импульса 1000 мкс, коэффициент заполнения составит 300/1000 = 0,3. Коэффициент заполнения также выражается в процентах, для чего коэффициент заполнения умножается на 100%. По примеру выше процентный коэффициент заполнения составляет 0,3 х 100% = 30%.
Скважность импульса – это отношение периода импульсов к их длительности, т.е. величина, обратная коэффициенту заполнения. S = T/t.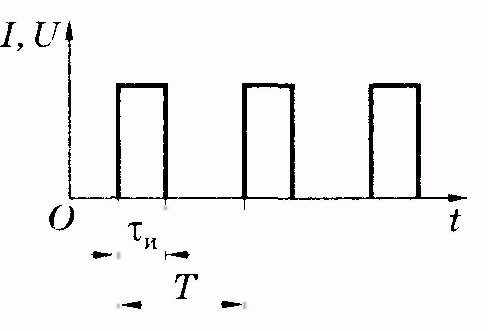
Частота сигнала определяется как величина, обратная периоду импульса, и представляет собой количество полных импульсов за 1 секунду. Для примера выше при периоде 1000 мкс = 0,001 с, частота составляет F = 1/0,001 – 1000 (Гц).
Смысл ШИМ заключается в регулировании среднего значения напряжения путем изменения коэффициента заполнения. Среднее значение напряжения равно произведению коэффициента заполнения и амплитуды напряжения. Так, при коэффициенте заполнения 0,3 и амплитуде напряжения 12 В среднее значение напряжения составит 0,3 х 12 = 3,6 (В). При изменении коэффициента заполнения в теоретически возможных пределах от 0% до 100% напряжение будет изменяться от 0 до 12 В, т.е. Широтно-импульсная модуляция позволяет регулировать напряжение в пределах от 0 до амплитуды сигнала. Что и используется для регулирования скорости вращения электродвигателя постоянного тока или яркости свечения светильника.
Сигнал ШИМ формируется микроконтроллером или аналоговой схемой.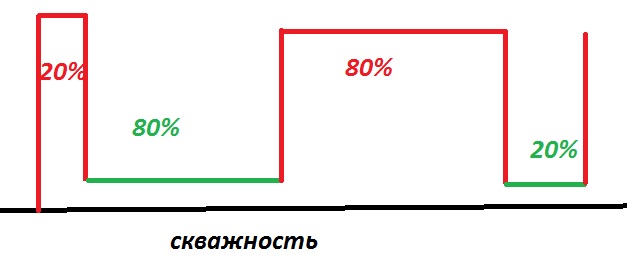 Этот сигнал обычно управляет мощной нагрузкой, подключаемой к источнику питания через ключевую схему на биполярном или полевом транзисторе. В ключевом режиме полупроводниковый прибор либо разомкнут, либо замкнут, промежуточное состояние исключается. В обоих случаях на ключе рассеивается ничтожная тепловая мощность. Поскольку эта мощность равна произведению тока через ключ на падение напряжения на нем, а в первом случае к нулю близок ток через ключ, а во втором напряжение.
Этот сигнал обычно управляет мощной нагрузкой, подключаемой к источнику питания через ключевую схему на биполярном или полевом транзисторе. В ключевом режиме полупроводниковый прибор либо разомкнут, либо замкнут, промежуточное состояние исключается. В обоих случаях на ключе рассеивается ничтожная тепловая мощность. Поскольку эта мощность равна произведению тока через ключ на падение напряжения на нем, а в первом случае к нулю близок ток через ключ, а во втором напряжение.
В переходных состояниях на ключе присутствует значительное напряжение с прохождением значительного тока, т.е. значительна и рассеиваемая тепловая мощность. Поэтому в качестве ключа необходимо применение малоинерционных полупроводниковых приборов с быстрым временем переключения, порядка десятков наносекунд.
Если ключевая схема управляет светодиодом, то при малой частоте сигнала светодиод будет мигать в такт с изменением напряжения сигнала ШИМ. При частоте сигнала выше 50 Гц мигания сливаются вследствие инерции человеческого зрения. Общая яркость свечения светодиода начинает зависеть от коэффициента заполнения – чем ниже коэффициент заполнения, тем слабее светится светодиод.
Общая яркость свечения светодиода начинает зависеть от коэффициента заполнения – чем ниже коэффициент заполнения, тем слабее светится светодиод.
При управлении посредством ШИМ скорости вращения двигателя постоянного тока частота ШИМ должна быть очень высокой, и лежать за пределами слышимых звуковых частот, т.е. превышать 15-20 кГц, в противном случае двигатель будет «звучать», издавая раздражающий слух писк с частотой ШИМ. От частоты зависит и стабильность работы двигателя. Низкочастотный сигнал ШИМ с невысоким коэффициентом заполнения приведет к нестабильной работе двигателя и даже возможной его остановке.
Тем самым, при управлении двигателем желательно повышать частоту сигнала ШИМ, но и здесь существует предел, определяемый инерционными свойствами полупроводникового ключа. Если ключ будет переключаться с запаздываниями, схема управления начнет работать с ошибками. Чтобы избежать потерь энергии и добиться высокого коэффициента полезного действия импульсного преобразователя, полупроводниковый ключ должен обладать высоким быстродействием и низким сопротивлением проводимости.
Сигнал с выхода ШИМ можно также усреднять посредством простейшего фильтра низких частот. Иногда можно обойтись и без этого, поскольку электродвигатель обладает определенной электрической индуктивностью и механической инерцией. Сглаживание сигналов ШИМ происходит естественным путем в том случае, когда частота ШИМ превосходит время реакции регулируемого устройства.
Реализовать ШИМ можно посредством компаратора с двумя входами, на один из которых подается периодический пилообразный или треугольный сигнал от вспомогательного генератора, а на другой модулирующий сигнал управления. Длительность положительной части импульса ШИМ определяется временем, в течение которого уровень управляющего сигнала, подаваемого на один вход компаратора, превышает уровень сигнала вспомогательного генератора, подаваемого на другой вход компаратора.
При напряжении вспомогательного генератора выше напряжения управляющего сигнала на выходе компаратора будет отрицательная часть импульса.
Коэффициент заполнения периодических прямоугольных сигналов на выходе компаратора, а тем самым и среднее напряжение регулятора, зависит от уровня модулирующего сигнала, а частота определяется частотой сигнала вспомогательного генератора.
Цифровая широтно-импульсная модуляция
Существует разновидность ШИМ, называемая цифровой ШИМ. В этом случае период сигнала заполняется прямоугольными подымпульсами, и регулируется уже количество подымпульсов в периоде, что и определяет среднюю величину сигнала за период.
В цифровой ШИМ заполняющие период подымпульсы (или «единички») могут стоять в любом месте периода. Среднее значение напряжения за период определяется только их количеством, при этом подымпульсы могут следовать один за другим и сливаться. Отдельно стоящие подымпульсы приводят к ужесточению режима работы ключа.
В качестве источника сигнала цифровой ШИМ можно использовать COM-порт компьютера с 10-битовым сигналом на выходе. С учетом 8 информационных битов и 2 битов старт/стоп, в сигнале COM-порта присутствует от 1 до 9 «единичек», что позволяет регулировать напряжение в пределах 10-90% напряжения питания с шагом в 10%.
Похожие темы:
Параметры периодической последовательности импульсов
радиоликбез
Для периодической последовательности импульсов (рис, 151, а) свойственно следование импульсов через равные промежутки времени. Ее характеризуют следующие параметры.
Ее характеризуют следующие параметры.
Период следованияТи — интервал времени от момента появления одного импульса до момента появления следующего импульса той же полярности.
Частота следования Fи, являющаяся величиной, обратной периоду следования, т. е.
Длительность паузы Ти — время между моментом окончания одного импульса и началом другого:
Скважность импульсов Q, определяемая как отношение периода следования Ти к длительности tи
Среднее значение импульсного тока (напряжения) получается, если ток (напряжение) импульса равномерно распределить на весь период так, чтобы площадь прямоугольника IсрTи (рис. 151,б) была равновелика площади импульса Sи
|
Коэффициент заполнения — величина, обратная скважности, показывающая, какую часть периода занимает импульс: |
|
Рис. а — прямоугольных, б — колоколообразных |
 151. Периодическая последовательность импульсов:
151. Периодическая последовательность импульсов:Средняя мощность PСр определяется отношением энергии W, выделенной в цепи за период следования импульса Tи, к длительности этого периода:
Очевидно, РсрТи=Pиtи, откуда
Электронные приборы для импульсных схем очень часто выбирают по средней мощности.
Читайте также: Общая характеристика импульсного сигнала
Прохождение импульсов через линейные цепи
Efaster – быстрый поиск электронных компонентов
Верхние границы коэффициента заполнения
Frederik Dostal, Analog Devices
Изменяемым параметром, используемым в контуре регулирования выходного напряжения или тока импульсного стабилизатора, является коэффициент заполнения. Коэффициент заполнения (D) равен отношению времени включенного состояния (TON) к полной длительности цикла (T), то есть, к сумме времен выключенного состояния (TOFF) и включенного, и определяет простую взаимосвязь между входным и выходным напряжением.
Коэффициент заполнения (D) равен отношению времени включенного состояния (TON) к полной длительности цикла (T), то есть, к сумме времен выключенного состояния (TOFF) и включенного, и определяет простую взаимосвязь между входным и выходным напряжением.
| Рисунок 1. | Типичный импульсный понижающий регулятор с микросхемой ADP2441. | |
Для более точного расчета могут быть учтены и другие факторы, но для последующих объяснений они не являются решающими. Коэффициент заполнения импульсного регулятора зависит от его топологии. Коэффициент заполнения понижающего преобразователя, показанного на Рисунке 1, соответствует выражению
Для повышающего преобразователя выражение для коэффициента заполнения имеет вид
Эти формулы применимы к режиму непрерывной проводимости (CCM), то есть к режиму, в котором за период времени T ток дросселя не падает до нуля.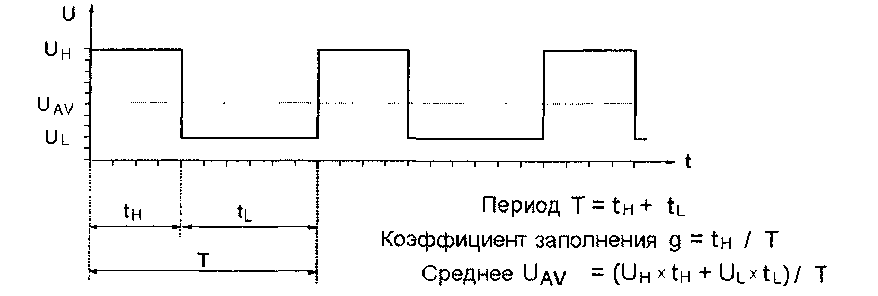 Режим непрерывной проводимости часто используется в схемах, работающих при номинальной нагрузке. В другом режиме, называемом режимом прерывистой проводимости (DCM), который включается автоматически при легких нагрузках или преднамеренно, ток катушки на интервалах выключения прекращается. Для каждого из этих двух режимов работы существуют собственные зависимости коэффициента заполнения от соотношения входного и выходного напряжения.
Режим непрерывной проводимости часто используется в схемах, работающих при номинальной нагрузке. В другом режиме, называемом режимом прерывистой проводимости (DCM), который включается автоматически при легких нагрузках или преднамеренно, ток катушки на интервалах выключения прекращается. Для каждого из этих двух режимов работы существуют собственные зависимости коэффициента заполнения от соотношения входного и выходного напряжения.
Рисунок 2 иллюстрирует работу импульсного понижающего преобразователя во временной области. Здесь мы рассмотрим понижающий импульсный регулятор, работающий в непрерывающемся режиме, то есть в режиме непрерывной проводимости. От частоты переключения коэффициент заполнения не зависит. Типичные значения длительности периода T лежат в интервале от 20 мкс (50 кГц) до 330 нс (3 МГц). Если входное и выходное напряжения одинаковы, потребуется коэффициент заполнения, равный 1. Это означает, что коммутатор всегда находится только во включенном состоянии и никогда в выключенном. Однако подобное невозможно ни для какого импульсного регулятора. Для этого MOSFET верхнего плеча в схеме на Рисунке 1 должен быть постоянно открытым. В случае, когда в качестве этого ключа используется N-канальный MOSFET, для нормальной работы напряжение на его затворе должно быть выше входного напряжения схемы. Если после каждого замыкания ключ на какое-то время размыкается, как в случае коэффициента заполнения, меньшего 1, создать напряжение более высокое, чем напряжение питания, можно довольно легко, используя принцип зарядового насоса. Однако при коэффициенте заполнения 100% это невозможно. Таким образом, импульсные регуляторы со 100-процентным коэффициентом заполнения либо должны иметь сложные зарядовые насосы, работающие независимо от MOSFET импульсного регулятора, либо ключ верхнего плеча в схеме на Рисунке 1 должен быть сделан на основе P-канального MOSFET. И то и другое увеличивает как время разработки, так и затраты средств.
Однако подобное невозможно ни для какого импульсного регулятора. Для этого MOSFET верхнего плеча в схеме на Рисунке 1 должен быть постоянно открытым. В случае, когда в качестве этого ключа используется N-канальный MOSFET, для нормальной работы напряжение на его затворе должно быть выше входного напряжения схемы. Если после каждого замыкания ключ на какое-то время размыкается, как в случае коэффициента заполнения, меньшего 1, создать напряжение более высокое, чем напряжение питания, можно довольно легко, используя принцип зарядового насоса. Однако при коэффициенте заполнения 100% это невозможно. Таким образом, импульсные регуляторы со 100-процентным коэффициентом заполнения либо должны иметь сложные зарядовые насосы, работающие независимо от MOSFET импульсного регулятора, либо ключ верхнего плеча в схеме на Рисунке 1 должен быть сделан на основе P-канального MOSFET. И то и другое увеличивает как время разработки, так и затраты средств.
Рисунок 2.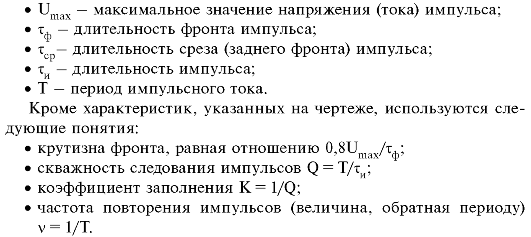 | Иллюстрация во временной области процессов переключения в импульсном понижающем преобразователе с непрерывающимся током катушки (CCM). | |
На Рисунке 3 показан импульсный регулятор ADP2370, который позволяет работать с коэффициентом заполнения 100% за счет использования P-канального MOSFET в качестве ключа верхнего плеча. Входное напряжение таких импульсных преобразователей может очень мало отличаться от выходного напряжения. При интеграции P-канального ключа в микросхему импульсного регулятора это решение не приведет к дополнительным затратам.
| Рисунок 3. | Пример импульсного регулятора, способного работать с коэффициентом заполнения 100%. | |
Если требуется, чтобы входное напряжение приложения могло понижаться до уровня, очень близкого к установленному значению выходного напряжения, следует выбрать импульсный регулятор, допускающий работу с коэффициентом заполнения 1 (или 100%).
Помимо ограничения на коэффициент заполнения, связанного с ключом верхнего плеча импульсного регулятора, существуют другие факторы, ограничивающие коэффициент заполнения. Их рассмотрению мы посвятим следующую статью.
АЕДОН – Некоторые аспекты организации систем электропитания АФАР. Часть 2. Нужно ли усреднять импульсную нагрузку на источник питания?
В первой части статьи были описаны преимущества и недостатки централизованной и децентрализованной систем электропитания приёмопередающих модулей (ППМ) активных фазированных антенных решёток (АФАР), а также требования к помехоэмиссии источников электропитания (ИП), применяющихся в таких системах. Во второй части будут рассмотрены примеры конфигураций систем электропитания любых импульсных нагрузок с усреднением и без усреднения импульсной мощности, проанализированы подходы к выбору ИП, показаны особенности, преимущества и недостатки каждой из этих структур.
При разработке концепции построения ИП различных импульсных нагрузок (и не только ППМ АФАР), разработчики могут использовать два различных подхода – либо применить мощный ИП, который обеспечит полную импульсную мощность, либо усреднить импульсную мощность нагрузки большой батареей конденсаторов и использовать ИП меньшей мощности.
На рисунке 1 изображены структуры таких систем, а на рисунке 2 приведены формы токов, выдаваемого ИП и потребляемого нагрузкой, а также проиллюстрировано напряжение на ней.
а) | б) |
Рисунок 1. Конфигурация ИП с усреднением (а) и без усреднения (б) импульсной мощности
а) | б) |
Рисунок 2. Форма токов ИП и нагрузки, а также напряжение на нагрузке в конфигурациях с усреднением (а) и без усреднения (б) импульсной мощности
Один из лидеров мирового рынка модульных ИП, американская компания Vicor Corporation показала [2], что во многих случаях система электропитания будет компактней, дешевле и надёжнее, если использовать усреднение мощности, потребляемой импульсной нагрузкой. При этом была отмечена особенно высокая эффективность такого подхода для приложений, в которых нагрузка допускает существенную нестабильность напряжения, вызванную разрядом и зарядом накопительных конденсаторов, подключенных к ней параллельно.
Несмотря на то, что некоторые источники [3, 4] указывают на необходимость подключения ёмкостных или индуктивно-ёмкостных накопителей энергии рядом с каждым ППМ при любом построении системы электропитания, всё же в некоторых случаях возможно уменьшить их величину, а иногда и полностью исключить такие накопители из структуры, улучшив при этом массогабаритные и надёжностные показатели системы электропитания [5].
Рассмотрим один из типовых примеров системы электропитания ППМ АФАР. Итак, напряжение питания ППМ составляет 28 В, импульсная потребляемая мощность 450 Вт, максимальная длительность импульса 5 мс, скважность импульсов – 5 (что соответствует коэффициенту заполнения 20%). В таблице сведены исходные данные такого технического задания.
| Входная сеть | |
| 300 В постоянного тока | |
| Параметры нагрузки | |
| Напряжение питания | 28 В |
| Импульсная потребляемая мощность | 450 Вт |
| Максимальная длительность импульса | 5 мс |
| Скважность импульсов | 5 |
| Климатические условия | |
| Температура окружающей среды |
–40. |
В первом варианте для энергоснабжения ППМ АФАР мы будем использовать ИП мощностью 500 Вт, который будет полноценно обеспечивать все 450 Вт мощности, потребляемой периодической импульсной нагрузкой. Во втором случае, ввиду того что средняя мощность нагрузки составляет всего 90 Вт, мы применим источник мощностью 150 Вт совместно с большой батареей конденсаторов, усредняющей потребляемый нагрузкой ток.
Поскольку от стабильности напряжения питания передатчика ППМ напрямую зависят показатели его СВЧ-излучения, типовое требование по нестабильности этого напряжения составляет ±1…4 %. Для того, чтобы обеспечить указанное качество напряжения питания нагрузки в конфигурации без усреднения импульсной мощности достаточно одного небольшого конденсатора ёмкостью около 220 мкФ, работающего только во время переходных процессов на фронте и спаде импульса нагрузки, а для системы с усреднением мощности необходима целая батарея конденсаторов суммарной ёмкостью около 70000 мкФ, снабжающая нагрузку энергией в течение всего её рабочего импульса.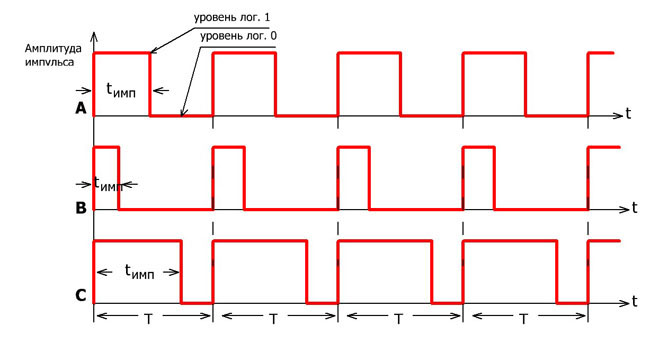 В работе [2] описаны несколько проблем, с которыми могут столкнуться разработчики систем электропитания, использующие накопительную ёмкость настолько большой величины. В частности, для многих серийных модульных ИП включение на такую существенную ёмкость приводит к срабатыванию защиты преобразователя от перегрузки по выходному току, кроме этого, конденсаторная батарея большой ёмкости может дестабилизировать в ИП контур обратной связи по напряжению.
В работе [2] описаны несколько проблем, с которыми могут столкнуться разработчики систем электропитания, использующие накопительную ёмкость настолько большой величины. В частности, для многих серийных модульных ИП включение на такую существенную ёмкость приводит к срабатыванию защиты преобразователя от перегрузки по выходному току, кроме этого, конденсаторная батарея большой ёмкости может дестабилизировать в ИП контур обратной связи по напряжению.
В свою очередь для схемы без усреднения импульсной мощности следует отметить, что величина требуемой ёмкости конденсатора на выходе ИП напрямую зависит от быстродействия его петли обратной связи по напряжению, которое также во многом ограничивается частотой преобразования ИП – высокая частота преобразования позволяет получить быстрый отклик преобразователя на скачкообразное изменение его нагрузки.
В документации на унифицированные модульные преобразователи напряжения часто размещают осциллограммы переходного процесса, иллюстрирующие реакцию выходного напряжения на воздействие импульсной нагрузки, которые помогают сравнить между собой время отклика их обратной связи на динамическую нагрузку. Анализируя величину переходного отклонения выходного напряжения на фронтах наброса и сброса тока на таких осциллограммах, следует обращать внимание на размах изменения тока нагрузки в процентах от максимальной мощности ИП, на минимальное значение динамической нагрузки во время испытаний, а также на скорость изменения импульсного тока. Большинство производителей ИП проводят испытания своей продукции на динамическую нагрузку в достаточно щадящих условиях, чтобы продемонстрировать приемлемые показатели стабильности выходного напряжения, например, задают размах изменения нагрузки ИП в диапазоне только 25% или 50%, сброс нагрузки осуществляют не до холостого хода, а фронты изменения тока устанавливают достаточно медленными, продолжительностью в десятки и сотни микросекунд. В приложениях с питанием ППМ без усреднения импульсной мощности ни один из перечисленных подходов к испытаниям не является приемлемым – изменение выходного тока ИП происходит за микро- и даже наносекунды, мощность, потребляемая нагрузкой во время пауз, близка к нулю, а во время рабочего импульса составляет от 70% до 100% от максимальной мощности ИП.
Анализируя величину переходного отклонения выходного напряжения на фронтах наброса и сброса тока на таких осциллограммах, следует обращать внимание на размах изменения тока нагрузки в процентах от максимальной мощности ИП, на минимальное значение динамической нагрузки во время испытаний, а также на скорость изменения импульсного тока. Большинство производителей ИП проводят испытания своей продукции на динамическую нагрузку в достаточно щадящих условиях, чтобы продемонстрировать приемлемые показатели стабильности выходного напряжения, например, задают размах изменения нагрузки ИП в диапазоне только 25% или 50%, сброс нагрузки осуществляют не до холостого хода, а фронты изменения тока устанавливают достаточно медленными, продолжительностью в десятки и сотни микросекунд. В приложениях с питанием ППМ без усреднения импульсной мощности ни один из перечисленных подходов к испытаниям не является приемлемым – изменение выходного тока ИП происходит за микро- и даже наносекунды, мощность, потребляемая нагрузкой во время пауз, близка к нулю, а во время рабочего импульса составляет от 70% до 100% от максимальной мощности ИП. Для того, чтобы объективно оценить качество отработки преобразователем импульсной нагрузки, необходимо либо запрашивать у техподдержки производителя осциллограммы переходных процессов выходного напряжения преобразователя в требуемом для системы электропитания режиме, либо проводить такие измерения самостоятельно.
Для того, чтобы объективно оценить качество отработки преобразователем импульсной нагрузки, необходимо либо запрашивать у техподдержки производителя осциллограммы переходных процессов выходного напряжения преобразователя в требуемом для системы электропитания режиме, либо проводить такие измерения самостоятельно.
В качестве примера на рисунке 3 показано сравнение двух различных серийных изолированных преобразователей напряжения мощностью 500 Вт с выходным напряжением 28 В при подключенном к их выходу конденсаторе ёмкостью 220 мкФ и набросе/сбросе нагрузки от нуля до 100% и обратно с фронтами изменения тока равными 200 нс. В одних и тех же условиях величина переходного отклонения выходного напряжения при набросе мощности нагрузки у преобразователя с быстродействующей обратной связью примерно в пятнадцать раз меньше, чем у аналогичного неспециализированного преобразователя. Быстродействие контура обратной связи по напряжению и величина ёмкости собственных выходных конденсаторов первого преобразователя оказались достаточны для обеспечения в данных условиях 3-процентной стабильности выходного напряжения без каких-либо значительных внешних фильтров.
а) | б) |
Рисунок 3. Переходное отклонение выходного напряжения неспециализированного преобразователя (а) и преобразователя с быстродействующей обратной связью по напряжению (б) мощностью 500 Вт с выходным напряжением 28 В в одних и тех же условиях при воздействии скачкообразного наброса/сброса мощности нагрузки в диапазоне от нуля до 100%.
Верхний луч – напряжение на нагрузке, 5 В/дел; нижний луч – ток нагрузки, 10 А/дел; развёртка – 5 мс/дел
Продолжим сравнение комплектации ИП для конфигураций с усреднением и без усреднения импульсной мощности. Поскольку более мощные преобразователи обычно имеют и более высокий КПД, то в рассматриваемом примере эффективность 500-ваттного преобразователя при выходной мощности 450 Вт составляет 92% и приводит к тепловыделению 7,8 Вт, а у 150-ваттного преобразователя, выбранного нами для системы с усреднением импульсной мощности, КПД при средней мощности нагрузки 90 Вт равен 87,5 %, что влечёт за собой 12,5 Вт тепловыделения. В результате, для того чтобы работать без перегрева, более мощному преобразователю оказалось достаточно собственной поверхности корпуса, а 150-ваттный преобразователь потребовал дополнительный радиатор и принудительный обдув. Даже в случае, когда ИП крепится на общую с ППМ жидкостную систему охлаждения, повышенное тепловыделение вызовет нежелательное снижение её эффективности.
В результате, для того чтобы работать без перегрева, более мощному преобразователю оказалось достаточно собственной поверхности корпуса, а 150-ваттный преобразователь потребовал дополнительный радиатор и принудительный обдув. Даже в случае, когда ИП крепится на общую с ППМ жидкостную систему охлаждения, повышенное тепловыделение вызовет нежелательное снижение её эффективности.
Таким образом, мы видим, что в рассматриваемом примере попытка сэкономить на мощности ИП вызывает существенные трудности при реализации системы электропитания и заметно осложняет использование такой конфигурации (рисунок 4).
Рисунок 4. Отличия в комплектации ИП в конфигурациях без усреднения (а) и с усреднением (б) импульсной мощности
На рисунке 5 показаны экспериментально снятые осциллограммы, которые иллюстрируют форму напряжения на нагрузке и форму потребляемого ею тока для первого и во второго вариантов. В обоих примерах форма тока, потребляемого нагрузкой одинаково импульсная и прямоугольная, что видно по нижним осциллограммам, но в конфигурации с усреднением мощности на нагрузке присутствует явно выраженная пилообразная составляющая, вызванная разрядом и зарядом батареи накопительных конденсаторов, а во второй структуре, без усреднения выходной мощности форма напряжения – практически прямая линия с короткими переходными процессами в моменты включения и выключения нагрузки.
а) | б) |
Рисунок 5. Форма напряжения питания нагрузки (верхний луч, 5В/дел) и форма потребляемого ею тока (нижний луч, 10А/дел) в конфигурациях с усреднением (а) и без усреднения (б) импульсной мощности. Развёртка – 5 мс/дел
На следующих осциллограммах приведены формы тока, который выдавали преобразователи (рисунок 6). Здесь видно, как первый преобразователь действительно работает постоянно со средней мощностью около 90 Вт, а второй отдаёт в нагрузку импульсы мощности амплитудой 450 Вт.
а) | б) |
Рисунок 6. Форма тока, выдаваемого преобразователями (10А/дел) в конфигурациях с усреднением (а) и без усреднения (б) импульсной мощности
Следует отметить, что форма выходного тока преобразователя, показанная на осциллограмме (рисунок 6б) указывает на одну из особенностей систем электропитания импульсных нагрузок без усреднения импульсной мощности. Поскольку ИП в данной конфигурации обеспечивает полноценное энергоснабжение нагрузки в течение всего рабочего импульса, потребляемый им из сети ток носит также явно выраженный импульсный характер, что допустимо не для всех приложений. Нагрузка на входную сеть в примере с усреднением импульсного тока в несколько раз меньше. Если входная сеть способна обеспечивать полную импульсную мощность нагрузки с учётом КПД ИП, то проблем с использованием конфигурации без усреднения импульсной мощности обычно не возникает, но в случае, когда её мощность ограничена и не позволяет питать нагрузку полноценной импульсной мощностью, приходится применять специальные меры по приведению характера потребляемого тока от импульсного к постоянному с некоторой допустимой пульсацией с помощью входных активных или пассивных токовых фильтров. Во время импульса нагрузки такой фильтр должен ограничивать потребляемый от входной сети ток, но в то же время питать ИП требуемой импульсной мощностью, а во время паузы – восполнять от сети разницу между отданной и потреблённой мощностью.
Поскольку ИП в данной конфигурации обеспечивает полноценное энергоснабжение нагрузки в течение всего рабочего импульса, потребляемый им из сети ток носит также явно выраженный импульсный характер, что допустимо не для всех приложений. Нагрузка на входную сеть в примере с усреднением импульсного тока в несколько раз меньше. Если входная сеть способна обеспечивать полную импульсную мощность нагрузки с учётом КПД ИП, то проблем с использованием конфигурации без усреднения импульсной мощности обычно не возникает, но в случае, когда её мощность ограничена и не позволяет питать нагрузку полноценной импульсной мощностью, приходится применять специальные меры по приведению характера потребляемого тока от импульсного к постоянному с некоторой допустимой пульсацией с помощью входных активных или пассивных токовых фильтров. Во время импульса нагрузки такой фильтр должен ограничивать потребляемый от входной сети ток, но в то же время питать ИП требуемой импульсной мощностью, а во время паузы – восполнять от сети разницу между отданной и потреблённой мощностью. Очевидно, что такие устройства, функционально представляющие собой фильтр тока, должны являться накопителями энергии. Применение пассивных индуктивных или ёмкостных накопителей энергии почти всегда сопряжено с неприемлемыми массогабаритными и стоимостными показателями, поэтому наиболее оптимальным вариантом является использование в качестве токового фильтра высокочастотного преобразователя напряжения без гальванической развязки с фильтрующим конденсатором на выходе. Причём целесообразно использовать повышающие, а не понижающие преобразователи, поскольку обычно энергетически выгоднее накапливать энергию при более высоком напряжении, так как накапливаемая в конденсаторе энергия пропорциональна квадрату напряжения (E = CU2 / 2). Во многих случаях, если исходно система питается от сети переменного тока, роль токового фильтра берёт на себя корректор коэффициента мощности.
Очевидно, что такие устройства, функционально представляющие собой фильтр тока, должны являться накопителями энергии. Применение пассивных индуктивных или ёмкостных накопителей энергии почти всегда сопряжено с неприемлемыми массогабаритными и стоимостными показателями, поэтому наиболее оптимальным вариантом является использование в качестве токового фильтра высокочастотного преобразователя напряжения без гальванической развязки с фильтрующим конденсатором на выходе. Причём целесообразно использовать повышающие, а не понижающие преобразователи, поскольку обычно энергетически выгоднее накапливать энергию при более высоком напряжении, так как накапливаемая в конденсаторе энергия пропорциональна квадрату напряжения (E = CU2 / 2). Во многих случаях, если исходно система питается от сети переменного тока, роль токового фильтра берёт на себя корректор коэффициента мощности.
Итак. Что мы имеем в итоге? Для построения системы электропитания импульсной нагрузки без усреднения импульсной мощности нам потребовался один преобразователь мощностью 500 Вт с небольшим конденсатором на выходе. Однако при этом мы должны быть уверены в том, что входная сеть сможет выдержать импульсное потребление амплитудой около 500 Вт. Для построения системы с усреднением импульсной мощности помимо преобразователя нам потребовались ещё и дополнительные средства по сглаживанию выходного импульсного тока, а также эффективная система отвода тепла, что приведёт к однозначному снижению надёжности такой конфигурации – электролитические конденсаторы со временем высыхают, а электромеханический компонент, вентилятор, также имея ограниченный ресурс, подвержен влиянию пыли и песка и является источником шума и вибрации. В случае использования системы жидкостного охлаждения повышенные теплопотери снизят её эффективность. К тому же, если коэффициент заполнения импульсов тока нагрузки во время работы системы или при её модернизации увеличится с 20%, например, до 40%, то на работе 500-ваттного преобразователя это практически не отразится, тогда как 150-ваттный войдёт в аварийный режим перегрузки и может выйти из строя.
Однако при этом мы должны быть уверены в том, что входная сеть сможет выдержать импульсное потребление амплитудой около 500 Вт. Для построения системы с усреднением импульсной мощности помимо преобразователя нам потребовались ещё и дополнительные средства по сглаживанию выходного импульсного тока, а также эффективная система отвода тепла, что приведёт к однозначному снижению надёжности такой конфигурации – электролитические конденсаторы со временем высыхают, а электромеханический компонент, вентилятор, также имея ограниченный ресурс, подвержен влиянию пыли и песка и является источником шума и вибрации. В случае использования системы жидкостного охлаждения повышенные теплопотери снизят её эффективность. К тому же, если коэффициент заполнения импульсов тока нагрузки во время работы системы или при её модернизации увеличится с 20%, например, до 40%, то на работе 500-ваттного преобразователя это практически не отразится, тогда как 150-ваттный войдёт в аварийный режим перегрузки и может выйти из строя.![]() Сравнение рассмотренных конфигураций системы электропитания по стоимости реализации практически не оставляет шансов на существование для варианта с усреднением мощности.
Сравнение рассмотренных конфигураций системы электропитания по стоимости реализации практически не оставляет шансов на существование для варианта с усреднением мощности.
В качестве практического примера использования преимуществ подхода к электропитанию импульсных нагрузок без усреднения импульсной мощности на рисунке 7 приведён внешний вид двенадцатиканальной системы электропитания [6], обеспечивающей энергоснабжение восьми ППМ напряжением +28 В, а также питание служебных узлов напряжениями +5 В, +12 В, -6 В и -50 В. Конденсаторы, установленные по выходам +28 В поддерживают требуемое качество напряжения лишь во время переходных процессов на фронте и спаде импульса нагрузки и не оказывают влияния на размах импульсного тока. Кроме этого, в данном изделии был реализован принцип децентрализации электропитания ППМ, за счёт чего удалось получить высокую надёжность системы, её малую высоту (11 мм), а также другие преимущества, свойственные децентрализованным системам электропитания. Влияние импульсной нагрузки на первичную сеть питания переменного тока блокируется там, где это рациональнее, т. е. на стороне высокого напряжения батареей конденсаторов, подключенной к выходу преобразователя, формирующего шину +300 В из входного переменного напряжения.
Рисунок 7. Двенадцатиканальная система электропитания, обеспечивающая энергоснабжение восьми ППМ АФАР напряжением +28 В без усреднения импульсной мощности
Таким образом, приведённый анализ показал, что существуют такие требования к системам электропитания АФАР, в которых однозначное преимущество будет иметь вариант питания нагрузки без усреднения импульсной мощности. Но всё же есть ряд приложений, в которых усреднение мощности будет выгоднее. В первую очередь – в структурах со значительной скважностью импульсов, т.е. для коэффициента заполнения менее 10%, или если длительность этих импульсов составляет не миллисекунды, как в рассмотренном примере, а единицы и доли микросекунд, т.е. время, сравнимое с временем отклика обратной связи по напряжению. Ещё одно из возможных применений системы с усреднением мощности – в системах, когда нагрузка конвертера способна выдерживать широкий диапазон входного напряжения, например, если это POL-преобразователь.
В каждом конкретном случае разработчик систем электропитания АФАР должен обращать внимание на все имеющиеся в его распоряжении факторы, учитывать все требования, предъявляемые в техническом задании на построение системы и принимать решение по её конфигурации только комплексно рассмотрев преимущества и недостатки всех возможных вариантов её реализации.
Литература
- Негреба О. Л. Некоторые аспекты организации систем электропитания АФАР. Часть 1. Силовая электроника. 2018. №5.
- Берри Д. [Berry D.] Системы электропитания с усреднением импульсной мощности: пер. с англ. О. Негребы. Силовая электроника. 2018. №4.
- Кириенко В. П. Регулируемые преобразователи систем импульсного электропитания. ЧГУ им. И.Н. Ульянова. 2008.
- Кушнерев Н. А., Шумов М. А. Система электропитания активных фазированных антенных решёток. Радиотехника. 2007. №12.
- Негреба О. Л. Обеспечение качества энергоснабжения импульсных нагрузок. Практические решения. Современная электроника.
 2015. №8.
2015. №8. - Индивидуальные разработки ООО «АЕДОН» https://aedon.ru/catalog/custom
Автор выражает искреннюю признательность за помощь в подготовке материалов для статьи главному конструктору ООО «ЭЛИАРС» Съедину М.В., заместителю генерального директора АО «НПП «Радий» по научной работе, главному конструктору Виткову М.Г., ведущему конструктору, начальнику сектора АО «Микроволновые системы» Матвееву А.Д., ведущему инженеру ООО «Алмаз-Антей Телекоммуникации» Гурину А.В., начальнику отдела АО «ВНИИРТ» Володину И.Н., а также сотрудникам ООО «АЕДОН» Четверикову Н.В., Проценко А.Н., Ермакову Д.С и Постникову А.И.
Импульсные сигналы
Импульсные сигналыКак показано ниже, импульсный сигнал или сигнал прямоугольной формы определяется периодом, шириной импульса, передним и задним фронтом.
Ширина импульса
Длительность импульса – это промежуток времени между 50% порогового значения переднего фронта импульса и 50% порогового значения следующего заднего фронта.
- Ширина импульса: до 1 000 000 с (см. ограничения ниже). Ширина импульса по умолчанию равна 100 мкс. Минимальная длительность импульсов для серии 33500 составляет 16 нс, а для серии 33600 – 5 нс до 4 В между пиками и 8 нс до 10 В между пиками.
- Задаваемая ширина импульса должна быть меньше разницы между периодом и минимальной шириной импульса.
- Прибор отрегулирует ширину импульса в соответствии с заданным периодом.
- Лицевая панель:
- SCPI: [SOURce[1|2]:]FUNCtion:PULSe:WIDTh {<seconds>|MINimum|MAXimum|DEFault}
Коэффициент заполнения импульса
Коэффициент заполнения импульса определяется следующим образом.
Коэффициент заполнения = 100 (ширина импульса)/период
Длительность импульса – это промежуток времени между 50% порогового значения переднего фронта импульса и 50% порогового значения следующего заднего фронта.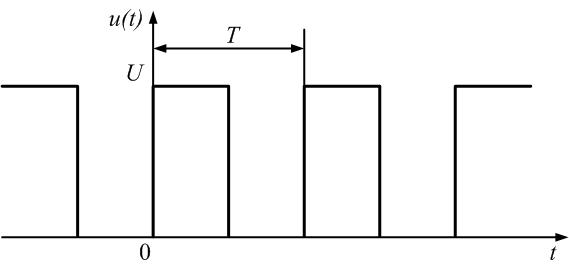
Время фронта
Время фронта определяет время перехода для переднего и заднего фронта импульсного сигнала (независимо или совместно). Время фронта представляет время между пороговыми значениями 10 % и 90 %.
Рабочий цикл– обзор
4 Выводы
Рабочий цикл PHEV полной разрядки на ежедневной основе в течение 10–15 лет в автомобильной среде может быть одной из самых сложных проблем, связанных с эксплуатацией аккумуляторов. Как цикличность, так и календарное старение влияют на скорость уменьшения мощности и емкости батареи. Была разработана модель для оценки комбинированных воздействий цикличности и календарного старения, включая время, проведенное при высоких значениях SOC, время, проведенное при высокой температуре, а также глубину разряда и частоту циклов.
Батареи составляют значительную часть начальной стоимости PHEV. Ожидается, что долгосрочная стоимость производства PHEV-20 будет примерно на 3000 долларов меньше, чем у PHEV-40, из-за меньшего размера батареи. Хотя может показаться, что PHEV-20 имеет меньший потенциал для вытеснения нефти из-за его меньшего электрического диапазона, подзарядка между поездками может позволить более эффективно использовать его меньшую батарею. Моделирование транспортных средств для 227 различных реальных профилей вождения показывает, что PHEV-20, заряжаемый при каждой возможности, может вытеснить на 5% больше топлива, чем PHEV-40, который заряжается только один раз за ночь.Однако этот сценарий возможной зарядки PHEV-20 предусматривает более частые циклы глубокой разрядки аккумулятора по сравнению со сценарием ночной зарядки PHEV-40, и можно ожидать, что аккумулятор PHEV-20 будет разряжаться быстрее.
Хотя может показаться, что PHEV-20 имеет меньший потенциал для вытеснения нефти из-за его меньшего электрического диапазона, подзарядка между поездками может позволить более эффективно использовать его меньшую батарею. Моделирование транспортных средств для 227 различных реальных профилей вождения показывает, что PHEV-20, заряжаемый при каждой возможности, может вытеснить на 5% больше топлива, чем PHEV-40, который заряжается только один раз за ночь.Однако этот сценарий возможной зарядки PHEV-20 предусматривает более частые циклы глубокой разрядки аккумулятора по сравнению со сценарием ночной зарядки PHEV-40, и можно ожидать, что аккумулятор PHEV-20 будет разряжаться быстрее.
Моделирование старения батареи для сценариев возможной зарядки PHEV-20 и ночной зарядки PHEV-40 для 227 ездовых циклов иллюстрирует большое разнообразие возможных результатов, в зависимости от того, каким образом батарея циклически перезаряжается и хранится. При более жесткой езде на велосипеде 25% смоделированного парка автомобилей с возможностью зарядки PHEV-20 испытывают значительно большую деградацию, чем парк автомобилей с ночной зарядкой PHEV-40, после 15 лет езды на велосипеде при 30 ° C (химия NCA). В некоторых ситуациях езда на велосипеде может уменьшить деградацию за счет сокращения времени, проведенного при высоком SOC; однако этот эффект обычно невелик по сравнению с совокупным стрессом от нескольких циклов глубокой разрядки в день. В зависимости от того, как используется аккумулятор, возможны результаты деградации, в которой доминируют как накопители, так и циклические нагрузки.
В некоторых ситуациях езда на велосипеде может уменьшить деградацию за счет сокращения времени, проведенного при высоком SOC; однако этот эффект обычно невелик по сравнению с совокупным стрессом от нескольких циклов глубокой разрядки в день. В зависимости от того, как используется аккумулятор, возможны результаты деградации, в которой доминируют как накопители, так и циклические нагрузки.
Часто задаваемые вопросы: широтно-импульсная модуляция (ШИМ)
Какова цель широтно-импульсной модуляции (ШИМ)?
В импульсных преобразователяхиспользуется силовой полупроводниковый переключатель (обычно MOSFET) для управления магнитным элементом (трансформатором или катушкой индуктивности), выпрямленный выход которого создает постоянное напряжение.Обычно КПД превышает 90%, что примерно в два раза выше, чем у линейного регулятора.
Импульсный преобразователь изменяет свой выходной постоянный ток в ответ на изменения нагрузки. Одним из широко используемых подходов является широтно-импульсная модуляция (PWM), которая управляет выходной мощностью переключателя питания, изменяя время его включения и выключения. Отношение времени включения к времени периода переключения – это рабочий цикл. На рис. 1 показаны три различных варианта рабочего цикла ШИМ: 10%, 50% и 90%. Рабочий цикл и мощность редко имеют какое-либо отношение друг к другу.Вместо этого рабочий цикл регулируется для регулирования выходного напряжения.
Отношение времени включения к времени периода переключения – это рабочий цикл. На рис. 1 показаны три различных варианта рабочего цикла ШИМ: 10%, 50% и 90%. Рабочий цикл и мощность редко имеют какое-либо отношение друг к другу.Вместо этого рабочий цикл регулируется для регулирования выходного напряжения.
На рис. 2 показан упрощенный ШИМ-контроллер, используемый в импульсном преобразователе. В процессе работы часть выходного постоянного напряжения возвращается в усилитель ошибки, что заставляет компаратор управлять временем включения и выключения ШИМ. Если отфильтрованный выходной сигнал силового полевого МОП-транзистора изменяется, обратная связь регулирует рабочий цикл для поддержания выходного напряжения на желаемом уровне.
Для генерирования ШИМ-сигнала, усилитель ошибки принимает в качестве входного сигнала обратной связи и ссылки стабильное напряжение для получения выходного сигнала, связанный с разностью двух входов.Компаратор сравнивает выходное напряжение усилителя ошибки с пилообразной характеристикой генератора, создавая модулированную ширину импульса. Выход компаратора подается на логическую схему переключения, выход которой поступает на выходной драйвер для внешнего силового MOSFET. Логика переключения обеспечивает возможность включения или отключения сигнала ШИМ, подаваемого на силовой полевой МОП-транзистор.
Выход компаратора подается на логическую схему переключения, выход которой поступает на выходной драйвер для внешнего силового MOSFET. Логика переключения обеспечивает возможность включения или отключения сигнала ШИМ, подаваемого на силовой полевой МОП-транзистор.
Почему схема ШИМ требует компенсации крутизны?
Для рабочих циклов ШИМ выше 50% требуется компенсационное линейное изменение, называемое компенсацией наклона, чтобы избежать нестабильности.Более высокие рабочие циклы требуют еще большей компенсации крутизны. То есть, если переключатель PWM включен более чем на 50% периода переключения, необходимо использовать компенсацию крутизны для поддержания стабильности системы. При традиционной компенсации крутизны переключающий преобразователь может стать нестабильным для рабочих циклов, приближающихся к 100%, поэтому необходимо использовать специальную компенсацию крутизны. На рисунке 3 показан ШИМ-контроллер, который использует компенсацию наклона.
Схема блокировки пониженного напряжения (UVLO) устанавливает рабочий диапазон входного постоянного напряжения ШИМ-контроллера.Есть два порога UVLO. При превышении порога включения UVLO включается ШИМ-контроллер. Если входное напряжение постоянного тока падает ниже порога отключения UVLO, контроллер PWM отключается.
КонтроллерыPWM могут иметь однополярные или двойные выходы. Типы с двумя выходами предназначены для двухтактных, мостовых или синхронных выпрямительных MOSFET. В этих конфигурациях контроллер ШИМ должен либо точно установить мертвое время двух выходов, либо предотвратить их перекрытие. Если оба выхода могут быть включены одновременно, это приведет к увеличению рассеиваемой мощности и электромагнитных помех.Некоторые контроллеры PWM включают специальные схемы для управления мертвым временем или перекрытием.
Большинство микросхем ШИМ-контроллеров обеспечивают токоограничивающую защиту путем измерения выходного тока. Если вход считывания тока превышает определенный порог, он завершает текущий цикл (поцикловое ограничение тока).
Схема схемы имеет решающее значение при использовании резистора считывания тока, который должен быть типа с низкой индуктивностью. Найдите его и конденсатор фильтра считывания тока очень близко к выводу PWM IC и подключите его напрямую.Кроме того, все чувствительные к шуму соединения заземления малой мощности должны быть соединены вместе рядом с землей ИС, а одно соединение должно быть выполнено с заземлением питания (точка заземления сенсорного резистора).
В большинстве ИС ШИМ-контроллеров один внешний резистор или конденсатор устанавливает частоту генератора. Чтобы установить желаемую частоту генератора, используйте уравнение в таблице данных контроллера для расчета номинала резистора.
Некоторые преобразователи ШИМ включают возможность синхронизации генератора с внешними часами с частотой, которая выше или ниже частоты внутреннего генератора.Если синхронизация не требуется, подключите вывод синхронизации к земле, чтобы предотвратить шумовые помехи.
Функция плавного пуска позволяет преобразователю мощности постепенно достигать начальной установившейся рабочей точки, тем самым снижая пусковые напряжения и скачки напряжения.![]() В большинстве ИС с ШИМ внешний конденсатор определяет время плавного пуска.
В большинстве ИС с ШИМ внешний конденсатор определяет время плавного пуска.
Высокоскоростной широтно-импульсный модулятор
MCP1631 и MCP1631V компанииMicrochip Technology – это высокоскоростные аналоговые ШИМ.. В сочетании с микроконтроллером MCP1631 / MCP1631V может управлять рабочим циклом энергосистемы, обеспечивая регулирование выходного напряжения или тока. Микроконтроллер можно использовать для регулировки выходного напряжения или тока, частоты переключения и максимального рабочего цикла, обеспечивая при этом дополнительные функции, делающие систему питания более интеллектуальной, надежной и адаптируемой.
MCP1631 (управление в режиме тока) и MCP1631V (управление в режиме напряжения) содержит ШИМ, драйвер MOSFET, усилитель считывания тока, усилитель считывания напряжения и компаратор перенапряжения.Эти ИС работают с входным напряжением от 3,0 В до 5,5 В. Дополнительные функции включают отключение, блокировку пониженного напряжения (UVLO) и защиту от перегрева.
Для приложений, которые работают от входа высокого напряжения, MCP1631HV и MCP1631VHV могут работать напрямую от входа от + 3,5 В до + 16 В. Для этих приложений доступен дополнительный регулируемый выход с низким падением напряжения + 5 В или + 3,3 В, который может обеспечивать ток до 250 мА для питания микроконтроллера и вспомогательных цепей
Внутренняя ШИМ MCP1631 / MCP1631V состоит из усилителя ошибки, высокоскоростного компаратора и защелки.Выход усилителя сравнивается либо с MCP1631 CS (вход первичного измерения тока), либо с MCP1631V VRAMP (вход линейного изменения напряжения) высокоскоростного компаратора. Когда сигнал CS или VRAMP достигает уровня выходного сигнала усилителя ошибки, цикл включения завершается, и внешний переключатель фиксируется до начала следующего цикла.
Среди типичных приложений для MCP1631 / MCP1631V можно назвать зарядные устройства с программируемым переключателем, способные заряжать различные химические соединения, такие как литий-ионные, никель-металлогидридные, никель-кадмиевые и свинцово-кислотные, сконфигурированные как одиночные или множественные элементы. Комбинируя с небольшим микроконтроллером, можно также разработать интеллектуальные конструкции светодиодного освещения и программируемые источники напряжения и тока топологии SEPIC.
Комбинируя с небольшим микроконтроллером, можно также разработать интеллектуальные конструкции светодиодного освещения и программируемые источники напряжения и тока топологии SEPIC.
Входы MCP1631 / MCP1631V могут быть присоединены к контактам ввода / вывода микроконтроллера для гибкости проектирования. Дополнительные функции, интегрированные в MCP1631HV / MCP1631VHV, обеспечивают формирование сигнала и функции защиты для зарядных устройств или источников постоянного тока.
Контроллер повышения текущего режима
Показано на Рисунок 3 – это Texas Instruments TPS40210 и TPS40211 с широким входным напряжением (4.От 5 В до 52 В), несинхронные регуляторы повышения. Они подходят для топологий, в которых требуется N-канальный полевой транзистор с заземленным источником, включая повышающий, обратный, SEPIC и различные приложения для драйверов светодиодов.
Особенности устройства включают программируемый плавный пуск, защиту от перегрузки по току с автоматическим повторным запуском и программируемую частоту генератора. Управление в текущем режиме обеспечивает улучшенную переходную характеристику и упрощенную компенсацию контура. Основное различие между этими двумя частями является опорным напряжением, к которому усилитель ошибки регулирует FB контактный.
Управление в текущем режиме обеспечивает улучшенную переходную характеристику и упрощенную компенсацию контура. Основное различие между этими двумя частями является опорным напряжением, к которому усилитель ошибки регулирует FB контактный.
Резистор и конденсатор, подключенные к контакту RC, определяют частоту генератора. Конденсатор заряжается примерно до VVDD / 20 током, протекающим через резистор, а затем разряжается внутренним транзистором TPS40210. Вы можете синхронизировать TPS40210 и TPS40211 с внешними часами, частота которых должна быть выше, чем частота свободного хода преобразователя.
Контроллеры tps40210 и TPS40211 являются контроллерами режима тока и используют резистор, включенный последовательно с полевым транзистором питания на клеммах источника, для измерения тока как для управления режимом тока, так и для защиты от перегрузки по току.Резистор считывания тока служит как ограничителем тока, так и датчиком управления режимом тока, поэтому его следует выбирать на основе как стабильности (ограничение управления в режиме тока), так и ограничения тока (ограничение устройства).
Стандартный повышающий преобразователь не имеет метода ограничения тока от входа к выходу в случае короткого замыкания на выходе. Если требуется защита от этого типа событий, необходимо использовать некоторую вторичную схему защиты.
Характеристикой режима управления пиковым током является состояние, при котором контур управления током становится нестабильным.Контур напряжения поддерживает регулирование, но пульсирующее напряжение на выходе увеличивается. и колеблется на половине частоты переключения.
Для исправления этого состояния необходимо применить компенсационную рампу от генератора к сигналу, поступающему на широтно-импульсный модулятор. В TPS40210 / 11 пилообразный сигнал генератора применяется в фиксированной величине к широтно-импульсному модулятору. Чтобы преобразователь не перешел в состояние субгармонической нестабильности, крутизна сигнала линейного нарастания компенсации должна составлять не менее половины спада сигнала линейного изменения тока. Поскольку компенсационная рампа является фиксированной, она накладывает ограничение на выбор резистора считывания тока. Кривая компенсации крутизны должна быть не менее половины, а предпочтительно равной крутизне спада формы сигнала измерения тока, наблюдаемой на широтно-импульсном модуляторе.Максимальное значение устанавливается на резистор измерения тока при работе в непрерывном режиме с коэффициентом заполнения 50% или больше.
Поскольку компенсационная рампа является фиксированной, она накладывает ограничение на выбор резистора считывания тока. Кривая компенсации крутизны должна быть не менее половины, а предпочтительно равной крутизне спада формы сигнала измерения тока, наблюдаемой на широтно-импульсном модуляторе.Максимальное значение устанавливается на резистор измерения тока при работе в непрерывном режиме с коэффициентом заполнения 50% или больше.
В целях проектирования следует применить некоторый запас к фактическому значению резистора считывания тока.В качестве отправной точки фактический выбранный резистор должен быть на 80% или меньше, чем номинал резистора, который делает линейную характеристику компенсации крутизны равной половине крутизны спада тока.
Синхронный понижающий ШИМ-контроллер постоянного тока
ADP1828 – это универсальный синхронный понижающий контроллер напряжения с ШИМ-режимом. Он управляет всем N-канальным силовым каскадом для регулирования выходного напряжения от 0,6 В до 85% входного напряжения и рассчитан на работу с большими МОП-транзисторами для стабилизаторов точки нагрузки. ADP1828 идеально подходит для широкого спектра приложений с высоким энергопотреблением, таких как питание ввода-вывода DSP и ядра процессора, а также универсальное питание в телекоммуникациях, медицинской визуализации, ПК, играх и промышленных приложениях.
ADP1828 идеально подходит для широкого спектра приложений с высоким энергопотреблением, таких как питание ввода-вывода DSP и ядра процессора, а также универсальное питание в телекоммуникациях, медицинской визуализации, ПК, играх и промышленных приложениях.
Показанный на рис. 4 , ADP1828 работает от входных напряжений смещения от 3 В до 18 В с внутренним LDO, который генерирует выходное напряжение 5 В для входных напряжений смещения более 5,5 В. Цепи управления, драйверы затвора и Внешний повышающий конденсатор работает от выхода LDO для входа между 5.5 В и 18 В. PV питает привод затвора полевого МОП-транзистора нижнего уровня (DL), а IN питает внутреннюю схему управления. Подключите PV к PGND с конденсатором 1 мкФ или более, а от IN к GND с конденсатором 0,1 мкФ или более. Обойдите вход питания в PGND с помощью конденсатора подходящей емкости.
Частота коммутации также может быть синхронизирована с внешними часами до 2-х кратной номинальной частоты генератора. Выход часов можно использовать для синхронизации дополнительных ADP1828 (или контроллеров ADP1829), тем самым устраняя необходимость во внешнем источнике синхронизации.
Выход часов можно использовать для синхронизации дополнительных ADP1828 (или контроллеров ADP1829), тем самым устраняя необходимость во внешнем источнике синхронизации.
ADP1828 включает в себя защиту плавного пуска для ограничения любого пускового тока от входного источника питания во время запуска, защиту от обратного тока во время плавного пуска для предварительно заряженного выхода, а также регулируемую схему ограничения тока без потерь с использованием внешнего измерения RDS (ON) MOSFET . Для приложений, требующих упорядочивания источников питания, ADP1828 предоставляет отслеживающий вход, который позволяет отслеживать выходное напряжение во время запуска, выключения и отказов. Дополнительные функции контроля и управления включают тепловую перегрузку, блокировку при пониженном напряжении и исправное энергопотребление.
ADP1828 работает в диапазоне температур перехода от -40 ° C до + 125 ° C и доступен в 20-выводном корпусе QSOP
(PDF) Влияние высокой частоты и рабочего цикла при электрохимическом микродревелении
Следовательно, продукт значение напряжения и соответствующее время
, определяющее фарадеевский эффект
быстро увеличивается с увеличением рабочего цикла и приводит
к быстрому растворению материала во время обработки. Было обнаружено, что
Было обнаружено, что
скорость съема материала резко возрастает для
применяемого рабочего цикла, установленного на 30% и выше.При этом значении рабочего цикла
растворение материала было настолько высоким, что при
короткое замыкание не возникало даже при скорости подачи 0,4 мкм / с. Как следствие
, боковой зазор увеличивается очень быстро, и
было невозможно контролировать диаметр микроотверстия.
Для эффективного выполнения микрообработки скорость подачи микроинструмента
должна иметь линейную зависимость от скорости съема материала
. Следовательно, скорость подачи должна быть скорректирована
с MRR, что влияет на время обработки.При микросверлении
зазор между электродами должен поддерживаться
очень маленьким и узким для достижения более высокой точности обработки
в области микрообработки. Когда применяемый рабочий цикл
был уменьшен до значения менее 30%, произошел внезапный скачок плотности тока
, который мог быть
, контролируемым осциллографом.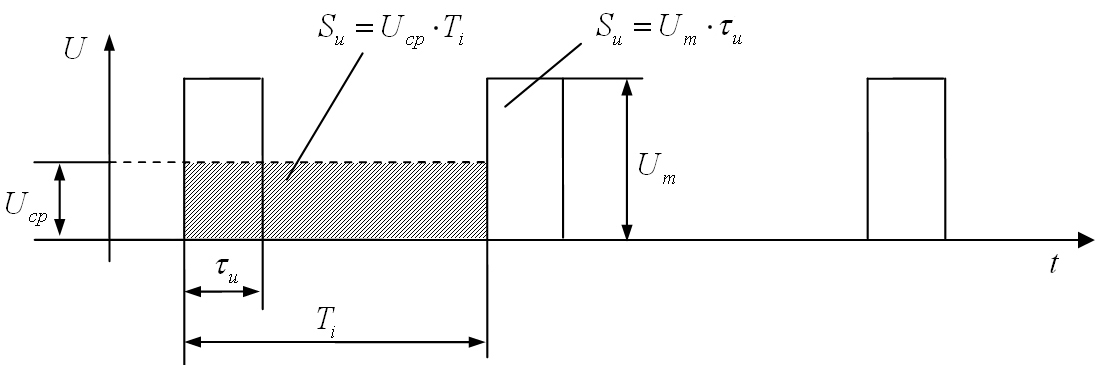 Это явление указывает на то, что
Это явление указывает на то, что
указывает на возможное корректирующее действие для предотвращения
микроинструмента возможности возникновения микроискр, когда
инструмент приближается к заготовке.Поэтому в процессе микробурения используется система управления
с механизмом обратной связи, которая управляет системой подачи инструмента
. Если электрод инструмента
контактирует с заготовкой, система
автоматически подает назад, пока инструмент не отсоединится
, и эта попытка продолжается до тех пор, пока не будет достигнута стабильная плотность тока
.
4 Заключение
В результате анализа и экспериментов, проведенных для
как применяемой частоты, так и рабочих циклов при электрохимическом сверлении
, важные выводы делаются следующим образом:
:
& MRR и время обработки уменьшается и увеличивается,
соответственно, с увеличением прикладной частоты для
как длинного, так и короткого микроинструмента для конкретной комбинации параметров микрообработки
.
& Количество коротких замыканий также увеличивается с увеличением прикладываемой частоты на
. Диаметр входа и выхода
оказался меньше из-за меньшего количества боковой эрозии
.
& Для того же диапазона времени импульса и прикладываемой частоты,
MRR
act
намного выше, а время обработки меньше
для короткого инструмента по сравнению с длинным инструментом.
& Входной и выходной диаметры отверстия, изготовленного
на никелевой пластине, оказались меньше для длинного микроинструмента
, но конусность отверстия увеличивается с увеличением прикладываемой частоты
.
& MRR
act
увеличивается, а время обработки уменьшается
с увеличением рабочего цикла. Короткого замыкания не происходит.
для более высоких рабочих циклов даже при очень высокой скорости подачи используется
для μECM.
& Для более высоких рабочих циклов невозможно точно контролировать диаметры микроотверстий
, поскольку боковая эрозия быстро увеличивается на
, а время обработки очень мало по сравнению с более низкими рабочими циклами
.
Выражение признательности Эта исследовательская работа была проведена в отделении
машиностроения, ядерной энергетики и производственной инженерии и
, финансируемом Министерством образования и развития,
Programmi di ricerca cofinanziati (COFIN). Авторы глубоко благодарны
профессору М. Санточи и профессору Г. Тантусси за сердечное руководство и ценные советы. Авторы также благодарят
MMA Khan, DIMNP за помощь при написании статьи.
Также выражаем признательность техническим сотрудникам ДИМНП.
Ссылки
1. Burkert St, Schulze H-P, Gmelin Th, Leone M (2009) Электрохимическая микрообработка (PECMM) pulse
– технические характеристики импульсных блоков
. Int J Mater Form 2 (1): 645–648. DOI: 10.1007 / s12289-
009-0464-2
2. Сен М., Шан Х.С. (2005) Обзор электрохимических процессов сверления микроотверстий до
. Int J Mach Tools Manuf 45 (2): 137–
152.doi: 10.1016 / j.ijmachtools. 2004.08.005
2004.08.005
3. Hung W, Sundarram S, Ozkeskin F, Powers M, Manriquez J,
Vasiraju V (2009) Электрохимическая микрообработка: тематическое исследование
для синергетической международной промышленности -academia сотрудничество,
Американское общество инженерного образования, AC 2009-2502 Прошлые
Ежегодные конференции и выставки ASEE, 14–17 июня 2009 г.,
Остин, Техас http://www.meteconline.org/view_abstract.php ?
id = 1948 (дата обращения 22 ноября 2010 г.)
4.Ahn SH, Ryu SH, Choi DK, Chu CN (2004) Electro-chemical
микро-сверление с использованием ультракоротких импульсов. Precis Eng 28: 129–134.
doi: 10.1016 / j.precisioneng.2003.07.004
5. Schuster R, Kirchner V, Allongue P, Ertl G (2000) Electrochem-
механическая микрообработка. Наука 289 (5476): 98–101. DOI: 10.1126 /
science.289.5476.98
6. Bhattacharyya B, Munda J (2003) Экспериментальное исследование процесса электрохимической микрообработки (EMM)
.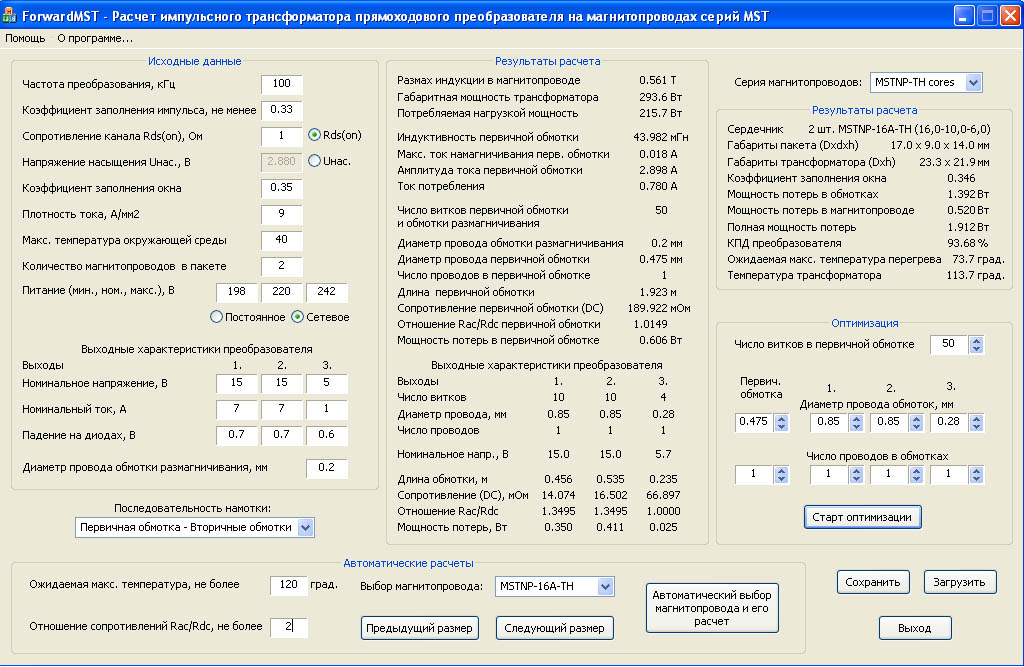 J Mater Process
J Mater Process
Technol 140: 287–291. doi: 10.1016 / S0924-0136 (03) 00722-2
7. Кок М., Кирхнер В., Шустер Р. (2003) Электрохимическая микро-
обработка ультракороткими импульсами напряжения – универсальный метод с литографической точностью
. Electrochim Acta 48: 3213–3219.
doi: 10.1016 / S0013-4686 (03) 00374-8
8. Парк Б.Дж., Ким Б.Х., Чу К.Н. (2006) Влияние размера электрода инструмента
на характеристики микроэлектрохимической обработки.CIRP Annals –
Manuf Technol 55 (1): 197–200. doi: 10.1016 / S0007-8506 (07) 60397-
7
9. Ван Дж.Дж., Чунг С.К., Ву Б.Х., Ляо Й.Й. (2007) Изготовление клиновидного инструмента
с помощью электрохимической микрообработки с алмазом
вроде карбоновое покрытие. J Mater Process Technol 187–
188: 264–269. DOI: 10.1016 / j.jmatprotec.2006.11.069
10. Munda J, Bhattacharyya B (2008) Исследование электрохимической обработки (EMM) с помощью методологии поверхности отклика
, основанной на подходе.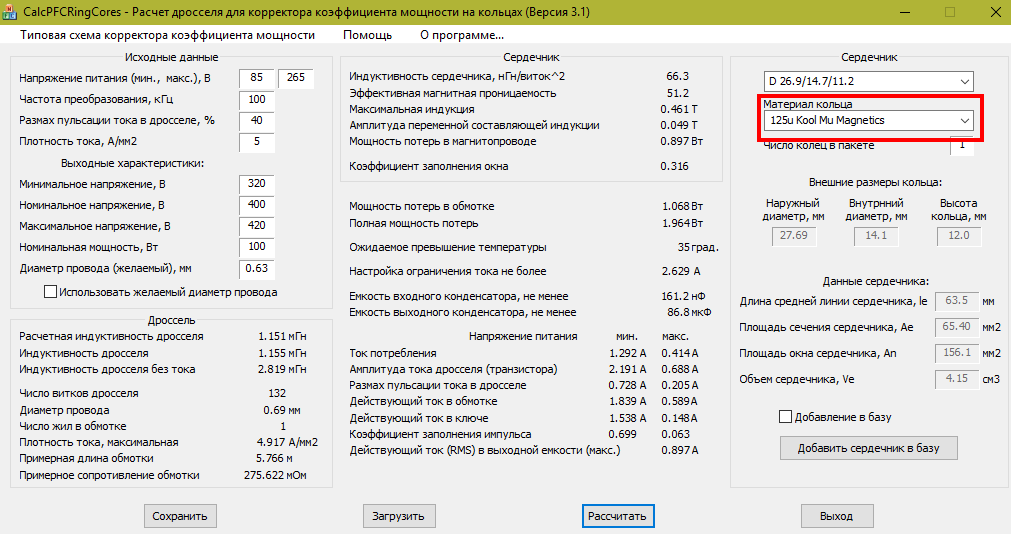 Int J Adv Manuf Technol 35: 821–832.
Int J Adv Manuf Technol 35: 821–832.
doi: 10.1007 / s00170-006-0759-0
11. Cagnon L, Kirchner V, Kock M, Schuster R, Ertl G, Gmelin WT,
Kück H (2003) Электрохимическая микрообработка нержавеющей стали
932 Int J Adv Manuf Technol (2011) 55: 921–933
| Измерение рабочего цикла | |
|---|---|
| Показанный товар | Рабочий цикл включения или выключения периодической формы пульсовой волны |
| Дисплейные блоки | 1%, 0.1%, 0,01% |
| Диапазон частот | от 0,005 Гц до 10 кГц |
| Точность | 0,01%, от 0,005 Гц до 500 Гц, 0,1% при 5 кГц, 1% при 10 кГц |
| Максимальный интервал синхронизации | 199. 99 с 99 с |
| Измерение широтно-импульсной модуляции (ШИМ) | |
| Показанный товар | Измерение на основе входа широтно-импульсной модуляции (ШИМ) |
| Дисплейные блоки | Масштабирование показаний в технических единицах |
| Диапазон частот | 0.От 005 Гц до 10 кГц |
| Точность | 0,01%, от 0,005 Гц до 500 Гц, 0,1% при 5 кГц, 1% при 10 кГц |
| Максимальный интервал синхронизации | 199.99 с |
| Дисплей | |
| Считывание | 6 светодиодных цифр, 7 сегментов, 14. 2 мм (0,56 дюйма), красный или зеленый. 2 мм (0,56 дюйма), красный или зеленый. |
| Диапазон | -999999 по +999999 |
| Показатели | Четыре светодиодные лампы |
| Входы | |
| Типы | AC, импульсы от транзисторов NPN, PNP, замыкания контактов, магнитные звукосниматели. |
| Сигнальная земля | Общая земля для каналов A и B |
| Минимальный сигнал | Девять диапазонов от (-12 до +12 мВ) до (+1,25 до + 2,1 В). |
| Максимальный сигнал | 250 В перем. Тока Тока |
| Шумовой фильтр | 1 МГц, 30 кГц, 250 Гц (по выбору) |
| Связаться с Debounce | 0, 3, 50 мс (по выбору) |
| Частота обновления | |
| Интервал преобразования | Время стробирования + 30 мс + 0-2 периода сигнала |
| Время выхода | На выбор от 10 мс до 199.99 с |
| Время до обнуления | По выбору от 10 мс до 199,99 с |
| Мощность | |
| Напряжение стандартное | 85-264 В переменного тока или 90-300 В постоянного тока |
| Напряжение, опция | 12-32 В переменного тока или 10-48 В постоянного тока |
| Частота | DC или 47-63 Гц |
| Потребляемая мощность (типовой, базовый метр) | 1. 2 Вт при 120 В переменного тока, 1,5 Вт при 240 В переменного тока, 1,3 Вт при 10 В постоянного тока, 1,4 Вт при 20 В постоянного тока,
1,55 Вт при 30 В постоянного тока, 1,8 Вт при 40 В постоянного тока, 2,15 Вт при 48 В постоянного тока 2 Вт при 120 В переменного тока, 1,5 Вт при 240 В переменного тока, 1,3 Вт при 10 В постоянного тока, 1,4 Вт при 20 В постоянного тока,
1,55 Вт при 30 В постоянного тока, 1,8 Вт при 40 В постоянного тока, 2,15 Вт при 48 В постоянного тока |
| Изоляция питания | 250 В действующее значение рабочее, 2,3 кВ действующее значение за 1 мин испытание |
| Аналоговый выход (дополнительно) | |
| Выходные уровни | 4-20 мА, 0-20 мА, 0-10 В, от -10 до + 10 В (выбирается перемычкой) |
| Текущее соответствие | 2 мА при 10 В (нагрузка> 5 кОм) |
| Соответствие напряжения | 12 В при 20 мА (нагрузка <600 Ом) |
| Масштабирование | Регулировка нуля и полной шкалы от -99999 до +99999 |
| Разрешение | 16 бит (0. 0015% от полной шкалы) 0015% от полной шкалы) |
| Изоляция | 250 В действующее значение рабочее, 2,3 кВ действующее значение за 1 мин испытание |
| (два аналоговых выхода имеют одно заземление) | |
| Релейные выходы (дополнительно) | |
| Двойные магнитные реле | 2 Форма C, 8 А при 250 В переменного тока или 24 В постоянного тока, 0.3 А при 250 В постоянного тока, резистивная нагрузка |
| Счетверенные магнитные реле | 4 Форма A (NO), 8 А при 250 В переменного тока или 24 В постоянного тока, 0,3 А при 250 В постоянного тока, резистивная нагрузка |
| Двойные твердотельные реле | 2 Форма A (NO), 120 мА при 140 В переменного тока или 180 В постоянного тока, резистивная нагрузка |
| Четыре твердотельных реле | 4 Форма A (NO), 120 мА при 140 В перем. Тока или 180 В пост. Тока, резистивная нагрузка Тока или 180 В пост. Тока, резистивная нагрузка |
| Реле общего пользования | Изолированные общие для сдвоенных реле или каждой пары из четырех реле |
| Релейная развязка | 250 В действующее рабочее, 2.3 кВ действующее значение за 1 минуту испытания |
| Режимы фиксации реле | С фиксацией или без фиксации |
| Активные режимы реле | Активен или выключен, активен высокий или низкий |
| Режимы гистерезиса | Режим полосы пропускания QA, разделенный гистерезис, гистерезис диапазона |
| Последовательный ввод / вывод данных (дополнительно) | |
| Выбор платы | RS232, RS485 (два разъема RJ11 или RJ45), USB, Ethernet, Преобразователь USB-RS485, преобразователь Ethernet-RS485 |
| Протоколы | Modbus RTU, Modbus ASCII, Modbus TCP (Ethernet), Laurel ASCII |
| Скорость передачи данных | от 300 до 19200 бод |
| Цифровые адреса | 247 (Modbus), 31 (Laurel ASCII), |
| Изоляция | 250 В действующее рабочее, 2. 3 кВ действующее значение за 1 мин испытание 3 кВ действующее значение за 1 мин испытание |
| Окружающая среда | |
| Рабочая температура | от 0 ° C до 55 ° C стандартно, от -40 ° C до 70 ° C с опцией -X |
| Температура хранения. | от -40 ° C до 85 ° C |
| Относительная влажность | 95% при 40 ° C, без конденсации |
| Защита | NEMA-4X (IP-65) при панельном монтаже |
| Сигнальные соединения | |
Переменный ток
ПЕРЕМЕННЫЙ ТОК
Потери мощности из-за сопротивления
провод I2R. Потери постоянного тока можно уменьшить, передавая при высоком и низком напряжении.
текущие уровни.
Потери постоянного тока можно уменьшить, передавая при высоком и низком напряжении.
текущие уровни.
Передача постоянного тока на высоком напряжение нецелесообразно, поскольку потребуются нагрузки для работы на высоких уровни напряжения.
В отличие от постоянного тока, переменный ток может быть ступенчатым повышение или понижение напряжения с помощью трансформатора.
Напряжение переменного тока (амплитуда) меняется через некоторое время. Он меняет полярность каждые полупериод.
Многие практические электронные цепи требуют постоянного тока.Схема выпрямителя используется для преобразования переменного тока в постоянный.
AC используется для передачи энергии и передача информации.
Электронное оборудование управляет поток информации. Электрооборудование управляет потоком энергии.
Три общих атрибута AC – это амплитуда, частота и фаза.
Синусоидальная волна
Синусоидальная форма волны, или
синусоидальная волна – это самая основная и наиболее часто используемая форма переменного тока. Производится AC
генератор или электронный генератор.
Производится AC
генератор или электронный генератор.
Пиковое и размах
Значение размаха составляет вдвое больше максимального или пикового значения.
Среднее значение
Истинное среднее значение a синусоида равна нулю. Для AC среднее значение принимается как среднее для половины только цикл.
Вольтметр постоянного тока покажет истинное среднее значение или ноль при измерении синусоидальной волны.
Эффективное (RMS) значение
Эффективное значение – это значение переменного напряжения, которое оказывает такое же нагревательное воздействие на сопротивление, как и равное значение DC.
Vrms = 0,707Vp
Vp = 1,414 Vrms
Мгновенные значения
Величина напряжения при конкретный момент – это мгновенное значение. Это значение может быть любым. между положительным пиком и отрицательным пиком.
ЧАСТОТА И ПЕРИОД
Частота
Частота, измеренная в герцах,
– количество полных циклов за одну секунду.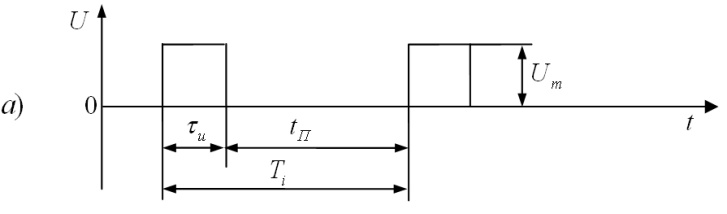
60 Гц используется в быту власть в США. В некоторых других странах используется 50 Гц. Более низкие частоты могут вызвать огни мерцать. Более высокие частоты вызывают большие потери мощности.
Период
Период – это время, которое требуется форма волны для завершения одного цикла.Период измеряется в секундах.
Т = 1 / f
f = 1 / Т
ДЛИНА ВОЛНЫ
Расстояние, пройденное форма волны в течение одного цикла – это длина волны.
d = v / f
Электромагнитные (радио) волны
Радиоволны распространяются по скорость света. Чем выше частота, тем короче длина волны. Коротковолновый радиоприемники используются для приема или передачи высокочастотных сигналов.
Звуковые волны
Звуковые волны распространяются в приблизительно 340 м / с (1100 футов / с).
ФАЗОВЫЕ ОТНОШЕНИЯ
Фаза – это количество
электрические степени, в которых одна волна опережает или отстает от другой волны.
Фазорные диаграммы
Фазор – это величина, которая имеет величину и направление. Величины постоянного тока скалярны, они имеют только величину.
На векторной диаграмме показан амплитуда сигнала относительно фазы.
Несинусоидальные волновые формы
Форма волны не синусоида волна (или косинусоидальная волна) – это несинусоидальная форма волны.
Импульсная волна
Форма пульсовой волны обычно используется для передачи цифровой информации.
Рабочий цикл – это отношение ширина импульса до периода одного цикла.
DC = PW / T
DC = рабочий цикл
PW = ширина импульса (с)
T = период (с)
Рабочий цикл можно выразить как процент, умноженный на 100.
Квадратная волна
Форма импульса с долей цикл 0,5 или 50% представляет собой прямоугольную волну.
Пилообразная волна
Треугольная волна
ГАРМОНИЧЕСКИЕ ЧАСТОТЫ
Точные целые числа, кратные
основной частоты все называются гармониками. Вторая гармоника 100
Форма волны Гц составляет 200 Гц. Третий гарноник – 300 Гц. Второй гарноник имеет один
половина амплитуды основной частоты.Третья гармоника имеет
одна треть основной частоты.
Вторая гармоника 100
Форма волны Гц составляет 200 Гц. Третий гарноник – 300 Гц. Второй гарноник имеет один
половина амплитуды основной частоты.Третья гармоника имеет
одна треть основной частоты.
Единицы измерения частоты
Октава – обычная единица для частотных кратных.
Управление широтно-импульсной модуляцией для электромагнитных клапанов
Широтно-импульсная модуляция (ШИМ) – это метод уменьшения средней мощности, передаваемой электрическим сигналом, путем разбиения его на заранее определенные импульсы. При использовании для управления электромагнитными клапанами прямого действия сигнал ШИМ может привести к значительной экономии энергии и снижению нагрева при сохранении желаемой пневматической функции.В этом блоге объясняется методология ШИМ, поскольку она применяется к электромагнитным клапанам прямого действия, и даются рекомендации по установке соответствующих параметров ШИМ.
Этот блог является третьей частью серии из трех частей, включающей полный технический документ «Эффективное и эффективное управление электромагнитным клапаном прямого действия: преимущества использования электрического управления нажатием и удержанием на электромагнитных клапанах прямого действия». Скачать копию здесь.
Скачать копию здесь.
Рисунок-14
Произвольные параметры, проиллюстрированные выше на рисунке 14, описывают два значения непрерывного тока срабатывания и удержания, подаваемых на клапан, (I Max ) и (I 5 ) соответственно.Чтобы обеспечить два отдельных уровня входного тока, источник питания должен быть регулируемым, или система должна иметь два независимых источника питания (I Max ) и (I 5 ). Учитывая, что оба варианта не идеальны с точки зрения стоимости и энергоэффективности, такой же выигрыш в энергосбережении может быть реализован за счет использования одиночного / непрерывного источника питания постоянного тока и добавления схемы ШИМ (широтно-импульсной модуляции). В следующем примере эта концепция объясняется более подробно.
В предыдущем примере (рис. 14) на клапан подается непрерывный сигнал 100 мА до реализации непрерывного сигнала 50 мА с энергосбережением.Чтобы реализовать эквивалентную систему энергосбережения с ШИМ, требуется такой же / начальный непрерывный сигнал срабатывания 100 мА для обеспечения срабатывания клапана.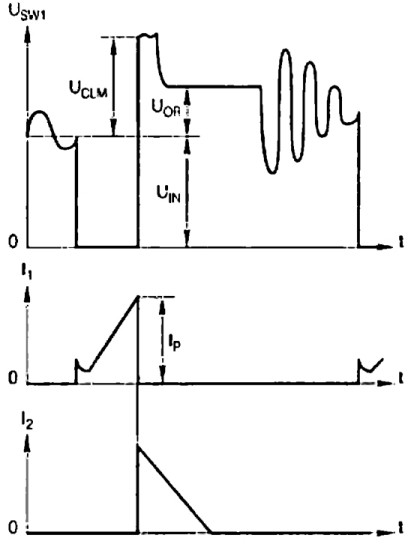 После срабатывания можно подать сигнал «удержания» ШИМ с коэффициентом заполнения 50% для получения эквивалентной экономии энергии. На рисунке -15 показан описанный выше сценарий попадания и удержания ШИМ.
После срабатывания можно подать сигнал «удержания» ШИМ с коэффициентом заполнения 50% для получения эквивалентной экономии энергии. На рисунке -15 показан описанный выше сценарий попадания и удержания ШИМ.
Рисунок-15
Средняя потребляемая мощность в этом примере может быть затем рассчитана путем умножения квадрата среднего тока (I MAX x% рабочего цикла) на сопротивление катушки.{PAVG = IAVG2 x R = (0,100 с x 0,50) ² x 136 Ом = 0,34 Вт}.
Конечные пользователи должны знать, что, хотя теоретическая / расчетная удерживаемая мощность эквивалентна в каждом случае (непрерывное питание и ШИМ), фактическая мощность, потребляемая при отключении, может незначительно отличаться. Следовательно, для конечного пользователя важно охарактеризовать параметр отключения, используя выбранный метод энергосбережения. В зависимости от метода ШИМ, это может быть достигнуто путем простого уменьшения рабочего цикла сигнала удержания ШИМ до тех пор, пока не будет соблюдено условие отключения.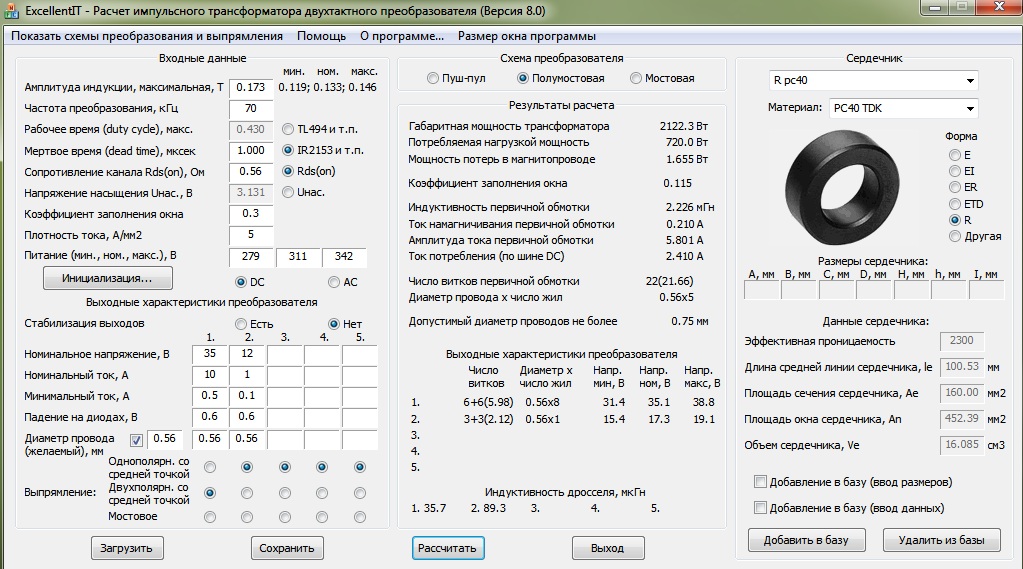
На рисунке 16 показан результат теста произвольной зависимости рабочего цикла от состояния клапана. В этом примере условие отпускания наблюдается, когда рабочий цикл уменьшается до 40%. Следует отметить, что размеры шагов рабочего цикла, представленные на этой иллюстрации, являются стандартными и предназначены только для целей пояснения. На практике изменение размера шага рабочего цикла не должно превышать 1%.
Рисунок 16
Следует отметить, что частота сигнала ШИМ, показанная на рисунках 15 и 16, предназначена только для учебных целей.Учитывая характеристики электромагнитного клапана с быстрым срабатыванием, частота подаваемого сигнала ШИМ должна быть достаточно высокой, чтобы предотвратить любые механические колебания якоря; чтобы механические компоненты клапана не преследовали колеблющийся электрический входной сигнал. Для всех платформ соленоидных клапанов, предлагаемых Parker Precision Fluidics, обычно рекомендуются сигналы ШИМ с частотой более 15 кГц, чтобы предотвратить возникновение этого состояния.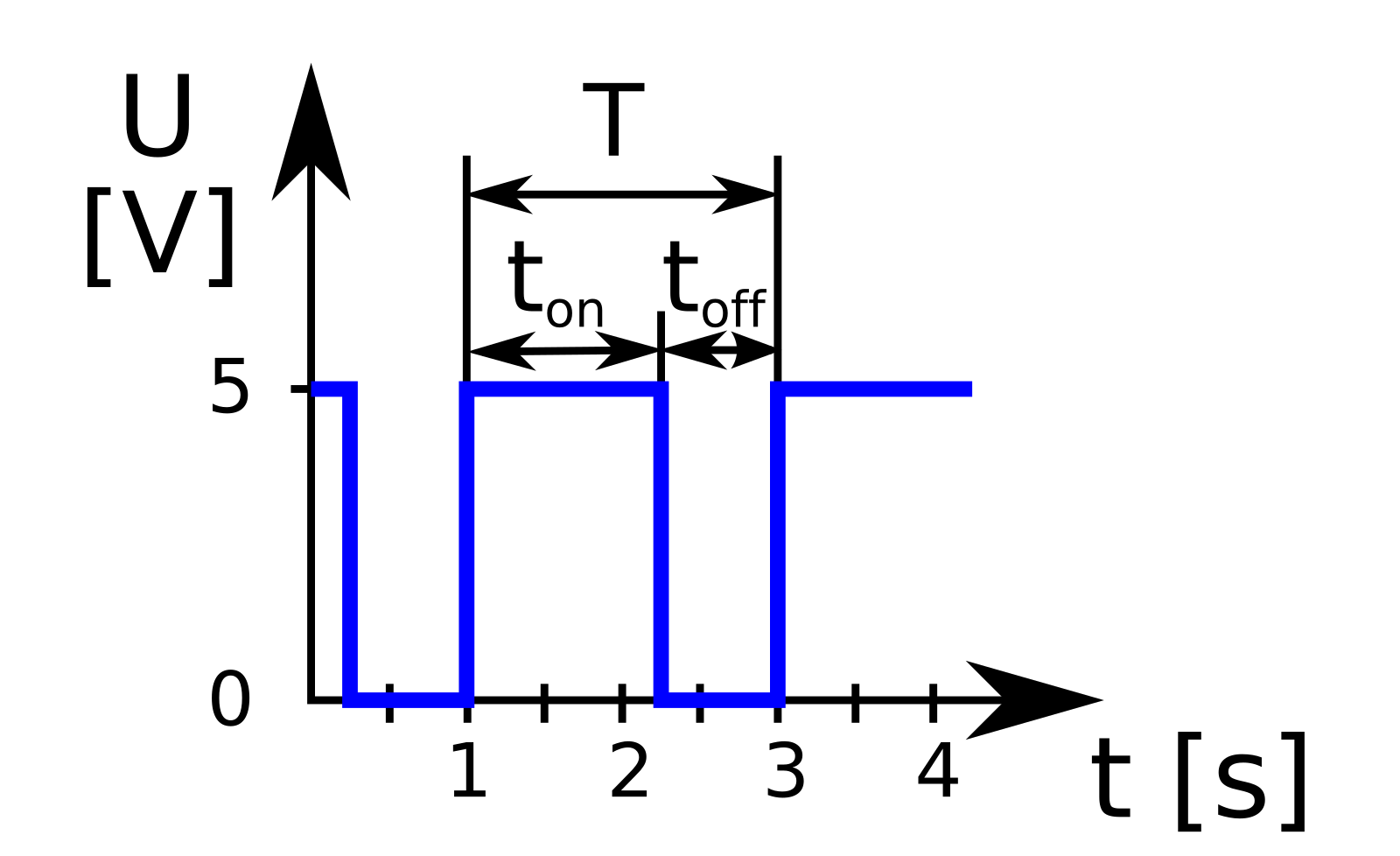
Конструкция клапана / типовые соображения
Во втором блоге этой серии из трех частей, озаглавленной: «Использование механики клапана с помощью схемы срабатывания и удержания», мы коснулись некоторых параметров приложения, которые влияют на характеристики отпускания клапана.Из перечисленных параметров (вибрация, температура окружающей среды, совместимость с эластомерами, функция клапана / подключение), функция клапана / подключение – единственный параметр, который напрямую связан с конструкцией клапана. Этот параметр обычно называют типом клапана, и, учитывая значительное влияние этого параметра на ток отключения, его необходимо учитывать при создании плана испытаний. Принципы работы электромагнитного клапана и иллюстрации, представленные в этом документе, представляют простую конфигурацию 2-ходового / 2-позиционного клапана нормально закрытого типа.Это обычная конструкция клапана, которая включена в эту статью, чтобы объяснить основную механику клапана. Принимая во внимание различия в существующих конструкциях клапанов и соответствующих типах клапанов (2-ходовой против 3-ходового, однонаправленный против двунаправленного потока, нормально закрытый против нормально открытого против распределителя против универсального), объем этого тема слишком велика для рассмотрения в этой статье. Более того, если конечный пользователь не знаком с конструкцией клапана, механическими требованиями к типу клапана и соответствующим влиянием на ток отключения, настоятельно рекомендуется проконсультироваться со службой технической поддержки Parker Precision Fluidics.Наш инженерный персонал может помочь в определении подходящих условий испытаний на основе требований приложения и выбранной конструкции клапана.
Более того, если конечный пользователь не знаком с конструкцией клапана, механическими требованиями к типу клапана и соответствующим влиянием на ток отключения, настоятельно рекомендуется проконсультироваться со службой технической поддержки Parker Precision Fluidics.Наш инженерный персонал может помочь в определении подходящих условий испытаний на основе требований приложения и выбранной конструкции клапана.Чтобы узнать больше о миниатюрных электромагнитных клапанах Precision Fluidics, загрузите каталог.
Эта статья была предоставлена Филом Доджем, старшим инженером Parker Precision Fluidics.
Связанное содержание
Определение нашего уникального вклада в мир
Основная работа электромагнитного клапана
Использование механики клапана с цепью Hit and Hold
Важные советы при выборе клапанов для аналитических приборов
Основные советы при выборе клапанов для аналитических приборов
Новый миниатюрный соленоидный клапан с тарельчатым клапаном увеличивает срок службы батареи
Управление мощностью микроконтроллера с широтно-импульсной модуляцией
Фиг.
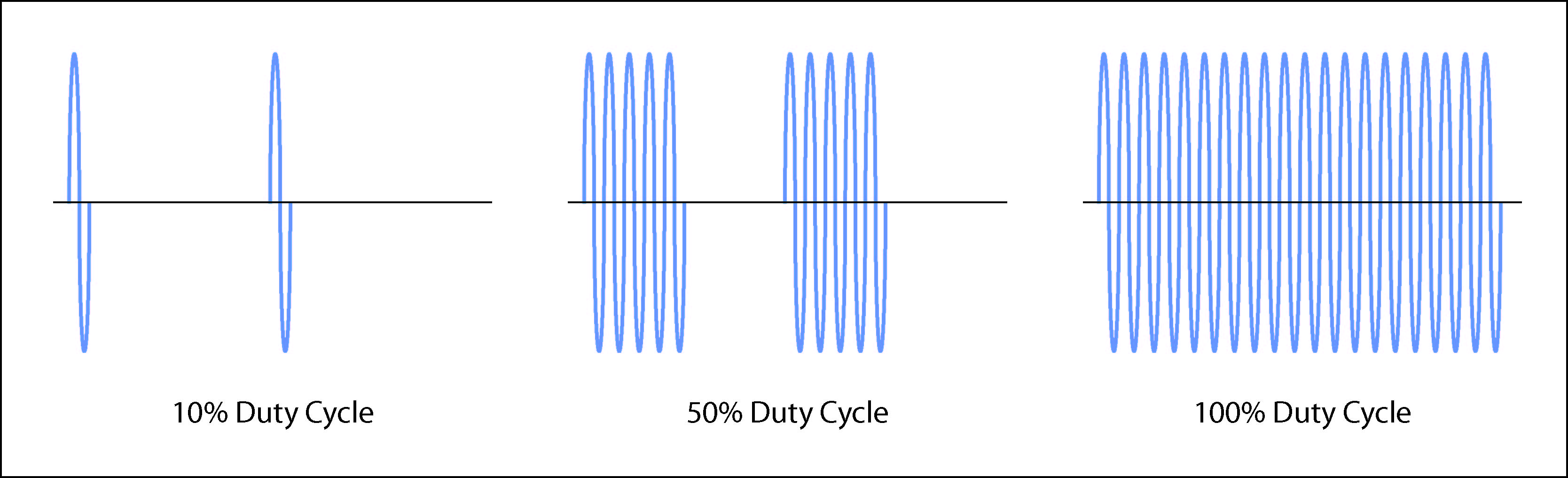 1 Испытательная установка с использованием Microchip 12F683 для демонстрации широтно-импульсной модуляции.
1 Испытательная установка с использованием Microchip 12F683 для демонстрации широтно-импульсной модуляции. by Lewis Loflin
Здесь мы исследуем концепцию широтно-импульсной модуляции, в частности, используемую в контроллерах Arduino и Microchip PIC. Наше основное внимание уделяется регулированию мощности – изменяя «рабочий цикл», мы можем управлять передачей мощности на любое количество нагрузок.
Широтно-импульсная модуляция (ШИМ) – это широко используемый метод управления мощностью, реализованный в современных электронных переключателях мощности.Среднее значение напряжения (и тока), подаваемого на нагрузку, регулируется путем быстрого включения и выключения (транзисторного) переключателя между питанием и нагрузкой. Чем дольше включен (транзисторный) переключатель по сравнению с периодами выключения, тем выше мощность, подаваемая на нагрузку.
Частота переключения ШИМ должна быть намного выше, чем то, что могло бы повлиять на нагрузку, то есть устройство, которое использует мощность .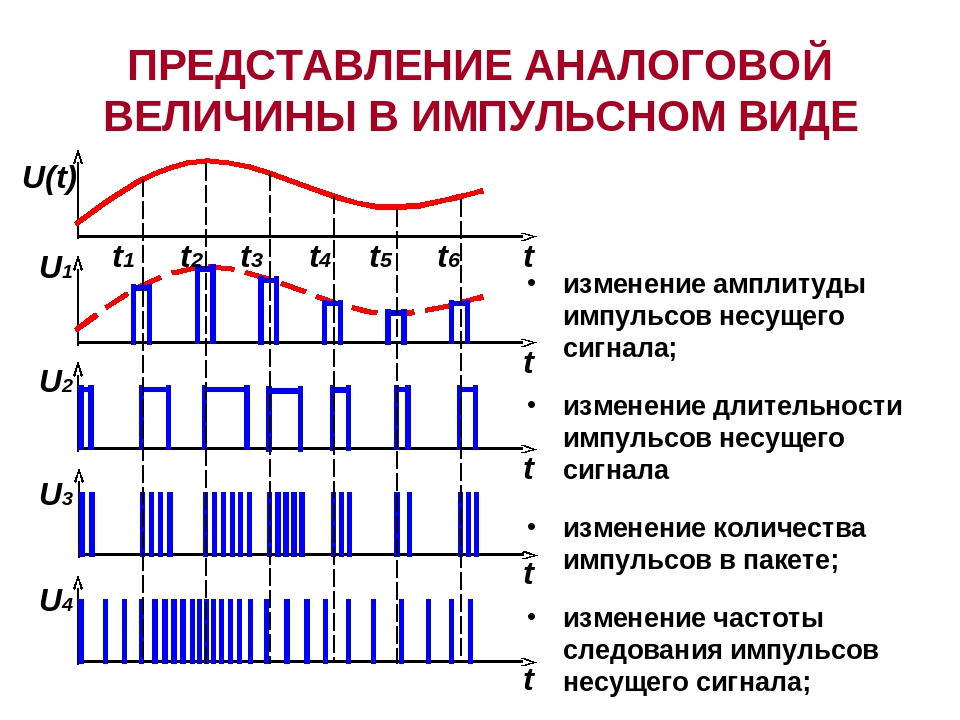 ..
..
Термин рабочий цикл описывает соотношение времени «включения» к регулярному интервалу или «периоду» времени; низкий рабочий цикл соответствует низкой мощности, потому что большую часть времени питание отключено.Рабочий цикл выражается в процентах, при 100% включенном состоянии.
Главное преимущество ШИМ – очень низкие потери мощности в коммутационных устройствах. Когда переключатель выключен, ток практически отсутствует, а когда он включен, падение напряжения на переключателе почти отсутствует. Таким образом, потери мощности, являющиеся продуктом напряжения и тока, в обоих случаях близки к нулю. ШИМ также хорошо работает с цифровыми элементами управления, которые … могут легко установить необходимый рабочий цикл.
Арт. https: //www.princeton.edu / ~ achaney / tmve / wiki100k / docs / Pulse-width_modulation.html
Рис. 2 Схема импульсного регулятора мощности LM2674-5.0.
Импульсные источники питания, например, используют контур обратной связи по напряжению для управления рабочим циклом выходного сигнала. LM2674-5.0 использует только несколько внешних компонентов и, в отличие от старых последовательных регуляторов напряжения, таких как LM7805, КПД приближается к 98 процентам.
LM2674-5.0 использует только несколько внешних компонентов и, в отличие от старых последовательных регуляторов напряжения, таких как LM7805, КПД приближается к 98 процентам.
Рис. 3 Среднее напряжение пропорционально рабочему циклу.
Широтно-импульсная модуляция с микроконтроллерами
Микроконтроллеры, такие как Arduino, не имеют понятия аналоговых напряжений – единиц и нулей, или HIGH и LOW, или GND и Vcc.Хотя можно использовать программные контуры для создания выходного сигнала ШИМ, в большинстве случаев мы используем аппаратные счетчики и делители. Время – это то, что uPC понимает. Через фильтр нижних частот мы можем создать аналоговое напряжение из выходного сигнала с широтно-импульсной модуляцией, в других случаях мы используем дежурный режим для управления средним напряжением .
Рис. 4 Испытательная установка Mircochip PIC PIC12F683.
В этой испытательной схеме (рис. 1) используется микросхема PIC PIC12F683 компании Mircochip с его аналого-цифровым преобразователем (АЦП), принимающим аналоговое значение потенциометра, преобразующим показания 0-5 В в 10-битное значение из диапазона 0-1023. Это 10-битное значение отправляется в модуль широтно-импульсной модуляции на вывод GP2.
Это 10-битное значение отправляется в модуль широтно-импульсной модуляции на вывод GP2.
Это значение устанавливает рабочий цикл (по времени в зависимости от периода) прямоугольной волны 250 Гц, генерируемой внутренним таймером. Период = 1 / F = 1/250 = 4 мсек.
Подробнее о PIC12F683 см. Введение в программирование PIC12F683.
Рис. 5
В испытательной схеме используется PIC12F683, чтобы контролировать среднее напряжение через комбинацию транзисторов Дарлингтона с оптопарой NPN к 12-вольтовой светодиодной лампе и 12-вольтовой батарее.Оптопара служит для изоляции цепи 12 В от цепи микроконтроллера 5 В.
Теперь давайте посмотрим на форму волны на выходе светодиодной лампы, начиная от полного до полного выключения. Выходная частота 250 Гц, период 4 мсек.
Рис. 6 Рабочий цикл ширины импульса 100 процентов.
Рис. 7 Рабочий цикл ширины импульса 75 процентов.
Рис. 8 Рабочий цикл ширины импульса 50 процентов.

