
Устройства управления электродвигателями
Устройство (система) управления электродвигателем (контроллер двигателя) – устройство или группа устройств, которые предназначены для управления электродвигателем.
Устройство управления электродвигателем может включать ручные или автоматические средства для запуска и остановки двигателя, средства выбора прямого или обратного направления вращения, выбора и регулирования скорости вращения, регулирования или ограничения момента, защиту от перегрузки и от неисправности.
Каждый электродвигатель должен иметь своего рода систему управления (контроллер). Система управления электродвигателем в зависимости от задачи будет иметь различные характеристики и сложность.
Простейшим случаем управления электродвигателем является выключатель который соединяет электродвигатель с источником энергии, например как в небольших бытовых приборах или электроинструменте (дрели и др.). Переключение может осуществляться вручную, с помощью реле или контактора подсоединенного к датчику для автоматического запуска или остановки электродвигателя.
Более сложные системы управления электродвигателями могут использоваться для точного управления скорости и момента электродвигателя, могут быть частью системы для точного управления угловым положением управляемого механизма.
Устройства управления электродвигателями могут управляться вручную, удаленно или автоматически. Они могут иметь, как только функции старта и остановки двигателя, так и многие другие функции.
Устройства управления двигателями можно классифицировать по типам управляемых электродвигателей (таких как СДПМ, КДПТ и др.) или по назначению.
Устройства для прямого подключения
Устройства с помощью которых электродвигатель напрямую подключается к источнику питания. Самый простой способ подключения. Небольшие электродвигатели некоторых типов могут быть включены: напрямую в розетку, с использованием выключателя, через автоматический выключатель. Такой способ подключения мгновенно соединяет электродвигатель с сетью питания.
Устройство плавного пуска
Используется для уменьшения пусковых токов асинхронных электродвигателей, что позволяет существенно продлить срок службы двигателя. Устройство плавного пуска используется в задачах, где не требуется управлять скоростью вращения или моментом электродвигателя. При этом для двигателей одинаковой мощности устройство плавного пуска дешевле частотного преобразователя.Сервопривод
Устройство позволяет точно контролировать угловое положение, скорость и ускорение исполнительного механизма посредством управления синхронным электродвигателем (обычно СДПМ).Надежный bldc контроллер двигателя для двигателей и электромобилей
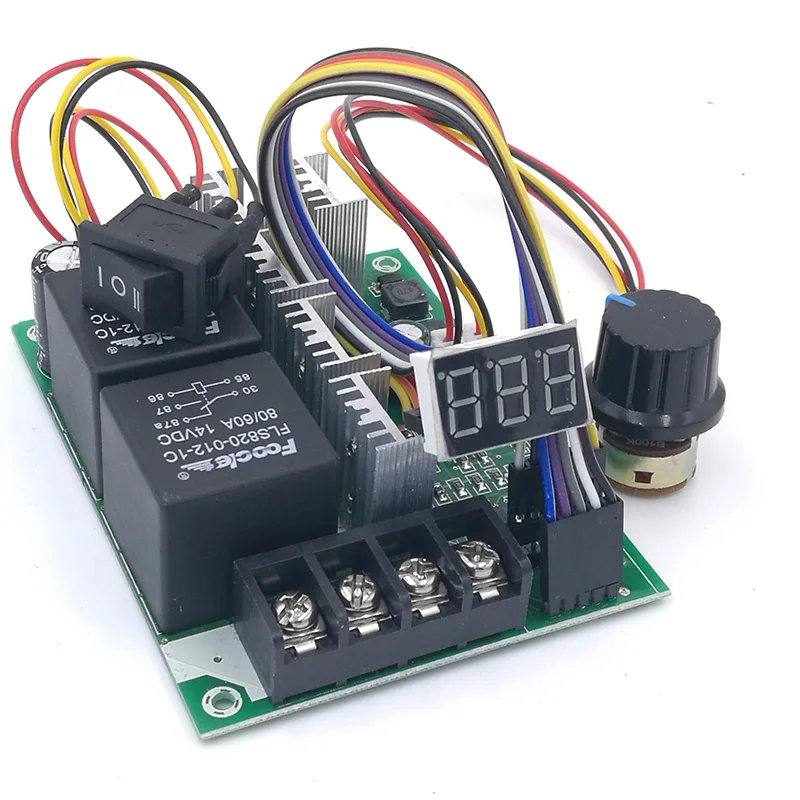
Ознакомьтесь с полным ассортиментом мощных, надежных и эффективных. bldc контроллер двигателя на Alibaba.com для обслуживания различных электрических приборов и двигателей электромобилей. Эти новаторские и продвинутые. bldc контроллер двигателя - это ультрасовременные продукты, которые действуют как великолепные блоки управления приборами и имеют прочную конструкцию. Файл. bldc контроллер двигателя, предлагаемые для продажи на сайте, имеют компактные размеры и содержат все необходимые стандартные функции. Эти продукты предлагаются на сайте ведущими поставщиками и оптовиками по конкурентоспособным ценам и доступным ценам.
Профессионал. bldc контроллер двигателя выставленные на продажу на сайте товары и аксессуары отличаются не только высоким качеством, чтобы прослужить долгое время, но и надежными с точки зрения производительности и устойчивости. Они энергоэффективны и могут грамотно управлять электроприборами в соответствии с вашими требованиями. Эти. bldc контроллер двигателя обладают высокой масштабируемостью и могут быть полностью настроены в соответствии с требованиями заказчика.
Эти. bldc контроллер двигателя устойчивы к температуре и могут поставляться с различными наборами напряжений, начиная с 12 В.
На Alibaba.com вы можете выбирать между несколькими разновидностями. bldc контроллер двигателя разных размеров, форм, цветов, функций и возможностей в зависимости от ваших требований. Эти. bldc контроллер двигателя идеально подходят для электромобилей и оснащены такими функциями, как нулевой джиттер, защита от кражи, жесткий и плавный запуск и многое другое. Вы можете использовать их. bldc контроллер двигателя для применения как в коммерческих, так и в промышленных целях благодаря превосходным двигателям постоянного тока и синусоидальным технологиям.
Купите эти продукты на Alibaba.com, ознакомившись с широким спектром. bldc контроллер двигателя, который также соответствует вашему бюджету и требованиям. Эти сертифицированные ISO, SGS и CE продукты доступны как OEM, так и ODM для оптовых закупок.
Вы также можете найти эти продукты, совместимые с солнечными приборами или приборами.
Контроллер электрического двигателя – это… Что такое Контроллер электрического двигателя?
| Информация в этой статье или некоторых её разделах устарела. Вы можете помочь проекту, обновив её и убрав после этого данный шаблон. |
Контро́ллер — многоступенчатый, многоцепной коммутационный аппарат с ручным управлением, предназначенный для изменения схемы главной цепи электрического двигателя или цепи возбуждения, включения и выключения электрической цепи с возможностью одновременно производить сложные переключения схемы управления с помощью одной рукоятки (маховика).
Барабанный контроллер
Барабанные контроллеры применяются для управления электрическим двигателем до 60 кВт (включение, выключение, изменение направления вращения и частоты вращения) при редких включениях (до 240 включений в час). Недостатком барабанного контроллера является невысокая износостойкость.
Конструкция барабанного контроллера
Барабанный контроллер состоит из вращающегося вала и группы неподвижных контактов. На изолированном валу крепятся металлические сегменты разного размера, расположенные под разными углами друг к другу и являющиеся подвижными контактами контроллера. Отдельные сегменты могут быть электрически соединены между собой.
Неподвижные контакты (контактные пальцы) крепятся на неподвижном основании и изолированы друг от друга. Каждый контактный палец соответствует сегменту вращающейся части контроллера. К ним подключаются внешние проводники.
При повороте вала контактные пальцы соприкасаются с сегментами в последовательности, определяемой взаимным расположением, размерами сегментов и наличием соединений между ними.
Кулачковый контроллер
Управляется с помощью рычага, число включений в час достигает 600. Особенностью является то, что включение происходит за счёт пружины, а выключения за счет кулачка, поэтому контакты разводятся даже при сваривании.
Плоский контроллер
Предназначены для плавного регулирования поля возбуждения крупных генераторов и для пуска двигателей большой мощности, так как имеют много ступеней для переключения. Управляется с помощью винтов, которые приводятся в движение с помощью электрического двигателя через червячную передачу. При ремонтных работах контроллер приводится в движение вручную, с помощью рукоятки. Недостаток — малая износостойкость.
См. также
Литература
- Касаткин А. С., Немцов М. В. Электротехника: Учебное пособие для вузов. — 4-е изд. — М.: Энергоатомиздат, 1983. — С. 424—426. — 440 с., ил. — 240 000 экз.
Контроллеры бесколлекторных двигателей Сервосила
Контроллеры бесколлекторных двигателей
Контроллеры СЕРВОСИЛА — это встраиваемые блоки управления для сервоприводов и тяговых электроприводов. Контроллеры превращают любой бесколлекторный электродвигатель в сервопривод или в интеллектуальный тяговый электропривод.
Контроллеры предназначены для управления бесколлекторными двигателями (PMSM, BLDC) любых производителей в сочетании с различными энкодерами абсолютного положения вала (BISS-C, SSI, SPI, ШИМ, квадратурный) или без них. Для подключения к управляющим компьютерам АСУ или к бортовым системам управления контроллеры предоставляют интерфейсы управления CAN и USB 2.0
Компания Сервосила изначально разработала данные контроллеры для применения в своих собственных продуктах — руках-манипуляторах и сервоприводах. Технология этих контроллеров прошла несколько итераций разработки и совершенствования и включила в себя значительный опыт, накопленный компанией в процессе эксплуатации своих роботов в различных, зачастую экстремальных, условиях. С тех пор контроллеры СЕРВОСИЛА нашли широкое применение в самых различных отраслях промышленности и науки, – везде, где требуется компьютерное управление бесколлекторными двигателями.Основными областями применения данных контроллеров бесколлекторных двигателей являются:
- сервомеханизмы, сервоприводы,
- тяговые электроприводы,
- АСУ ТП, промышленные линии, конвейеры, насосы,
- робототехнические устройства,
- интеллектуальное торговое оборудование,
- автоматизированное складское оборудование,
- испытательные стенды с компьютерным управлением,
- системы измерения и автоматической диагностики,
- тяговые электроприводы различных мобильных шасси,
- станки с ЧПУ,
- системы компьютерного зрения.

Поддерживаемые типы двигателей (любых производителей):
- Бесколлекторные (PMSM и BLDC), в том числе Maxon, Dunker и других.
- Бездатчиковые и с датчиками Холла (Sensorless и Sensored).
- Со встроенными энкодерами и с внешними энкодерами.
- Коллекторные (до 2шт одновременно) и соленоиды.
- Квадратурный интерфейс с индекс-сигналом,
- BISS-C интерфейс (в том числе к магнитным датчикам фирмы RLS),
- SSI интерфейс,
- ШИМ интерфейс,
- SPI интерфейс.

Датчики абсолютного положения вала («энкодеры») применяются в различных режимах сервоуправления, а также для поддержания плавного движения вала на низких скоростях вращения. Если энкодер в электроприводе отсутствует, то для таких случаев контроллеры поддерживают режимы бездатчикового управления (sensorless control) и управления по датчикам Холла (sensored control), а также серворежимы direct control, в которых энкодеры могут не требоваться.
Если энкодер в приводе присутствует, то контроллеры используют его, когда это имеет смысл. Если энкодер не подключен, то контроллеры могут работать и без него, но, возможно, в упрощенном режиме работы.
- либо через штатные разъемы на платах контроллеров,
- либо посредством припайки кабелей в специально предусмотренные отверстия на платах, чем обеспечивается виброустойчивость соединений.

Конструктивно разъемы для подключения кабелей расположены только с одной из сторон плат; тыльная сторона плат не имеет разъемов и предназначена для подключения теплоотводного радиатора или для монтажа платы напрямую на корпус электропривода, использующегося для отвода тепла от платы.
Контроллеры не имеют разъемов, выходящих «в сторону»; все разъемы имеют только ориентацию «вверх». Это сделано для облегчения интеграции контроллеров внутрь корпусов устройств, таких как сервоприводы цилиндрической формы, или в отсеки электрооборудования небольших габаритов.
Предусмотрен механизм для обновления прошивки плат через порт RS232.
Режимы управления
В контроллерах реализованы следующие режимы управления бесколлекторными двигателями:- Стабилизация выходного момента на валу (ETC: Electronic Torque Control).
 Применяется для точного управления силой, с которой электропривод воздействует на нагрузку, например, в испытательных стендах, АСУ ТП или в шагающих роботах.
Применяется для точного управления силой, с которой электропривод воздействует на нагрузку, например, в испытательных стендах, АСУ ТП или в шагающих роботах. - Стабилизация скорости вращения вала (ESC: Electronic Speed Control). Применяется для поддержания заданной скорости вращения двигателя, вне зависимости от меняющейся внешней нагрузки, например, в тяговых электроприводах конвейеров, насосов или в шасси мобильных роботов. Контроллер автоматически увеличивает или уменьшает момент на валу для того, чтоб поддерживать скорость вращения вала постоянной.
- Сервоуправление (Servo Control) — поворот до заданного положения вала и последующее удержание вала с использованием датчика положения вала (энкодера) через редуктор или напрямую. Применяется в робототехнических руках-манипуляторах, АСУ ТП, станках с ЧПУ и любых других устройствах, где необходимо повернуть вал двигателя на заданный угол, а затем поддерживать положение при изменяющейся внешней нагрузке.
 В зависимости от подключенного энкодера положения вала обеспечивается точность поворота сервопривода до 20 бит.
В зависимости от подключенного энкодера положения вала обеспечивается точность поворота сервопривода до 20 бит. - Direct Drive — точное управление положением вала посредством прямого позиционирования магнитного поля статора электродвигателя, в том числе при отсутствии редуктора в электроприводе. Применяется в системах компьютерного зрения, станках с ЧПУ, линейных двигателях, – везде где требуется максимальная точность управления положением без редукторов. В этом режиме электропривод на бесколлекторном двигателе может заменить шаговые двигатели при значительном улучшении точности.
- Тормоз вала («блокировка вращения»), – блокировка вращения вала вне зависимости от воздействия внешних нагрузок, например, для фиксации остановленного конвейера или для торможения колес мобильного шасси, стоящего «на горке». Блокировка происходит только работой бесколлекторного двигателя без применения каких-либо дополнительных тормозных устройств.
Для блокировки вала применяется метод, минимизируещий потребление электрической энергии.
- Рекуперация энергии в батарею. Если контроллер питается от батареи, то он способен «пропускать» ток обратно в батарею тогда, когда электродвигатель работает в режиме электрогенератора, например, при торможении мобильного шасси. При этом возможно программное управление силой тока, идущего в батарею. Этот режим также применяется в системах «стартер-генератор» в сочетании с двигателями внутреннего сгорания (ДВС), в которых после запуска ДВС электродвигатель переходит в режим электрогенератора.
- Direct Drive Control,
- Field Oriented Control (FOC),
- с Back-EMF Observer и Hall Sensors Observer,
- с функцией Q-D axis coupling compensation для гладкости хода,
- с опциональным field weakening для достижения максимальных скоростей вращения,
- с интеллектуальными алгоритмами защиты
- и управления динамикой электродвигателя,
- и автоматическим определением характеристик двигателя и привода.

Реализованный набор алгоритмов обеспечивает динамическую устойчивость и малошумность работы электродвигателя, а также достижение максимального момента или максимальной скорости вращения вала (в зависимости от задачи) при оптимизации энергопотребления и обеспечении защиты электродвигателя от перегрева, а редуктора от поломки.
Возможность управлять коллекторными двигателями и соленоидами посредством силовой ШИМ – это вспомогательная функция данных контроллеров, спроектированых прежде всего для управления бесколлекторными двигателями. Для коллекторных двигателей (в отличие от бесколлекторных) реализовано только управление без обратной связи (open loop). При этом при желании можно управлять двумя коллекторными двигателями одновременно (и даже тремя коллекторными двигателями при определенных ограничениях). Также с помощью данных контроллеров можно управлять соленоидами.
Автонастройка
Для облегчения настройки контроллера под выбранный электродвигатель предусмотрен режим автонастройки, в котором автоматически определяются основные характеристики бесколлекторного электродвигателя и вычисляются оптимальные настройки законов управления. Эта функция значительно упрощает интеграцию контроллера с новыми бесколлекторными двигателями, если даже характеристики двигателя точно не известны по каким-либо причинам («утерян datasheet»).Интерфейсы программного управления
Предусмотрены следующие интерфейсы для интеграции с управляющими компьютерами или бортовыми системами управления:- Шина CAN с протоколом верхнего уровня CANopen.
 Контроллеры имеют два порта CANbus для облегчения построения «гирлянды» из контроллеров. До 126 контроллеров СЕРВОСИЛА могут быть подключены к единой шине CANbus. Это применяется для построения АСУ, управляющих множеством электроприводов одновременно, или в робототехнических системах с большим числом степеней свободы.
Контроллеры имеют два порта CANbus для облегчения построения «гирлянды» из контроллеров. До 126 контроллеров СЕРВОСИЛА могут быть подключены к единой шине CANbus. Это применяется для построения АСУ, управляющих множеством электроприводов одновременно, или в робототехнических системах с большим числом степеней свободы. - Порт USB 2.0, который автоматически инициализируется, как виртуальный COM-порт в Windows 10, 8 и в Linux. Установка специальных драйверов не требуется ни в Windows, ни в Linux. Порт USB 2.0 у контроллеров СЕРВОСИЛА удобен тем, что позволяет управлять электродвигателями с помощью обычных персональных компьютеров или их промышленных вариантов, например, на испытательных стендах или автоматизированных системах контроля качества. Контроллеры СЕРВОСИЛА способны выполнять функцию USB-в-CAN шлюза («переходника USB2CAN») для обеспечения доступа управляющих компьютеров к сети CAN. Этот «переходник» работает как в Windows 10, 8, так и в Linux.

К Windows 10/8/7 контроллеры СЕРВОСИЛА подключаются через интерфейс USB 2.0, который автоматически определяется, как виртуальный COM-порт. Управляющие пользовательские программы, работающие под Windows, могут посылать текстовые команды в контроллер СЕРВОСИЛА через этот виртуальный COM-порт, а также получать обратно телеметрию в текстовом виде. Обмен данными происходит через стандартный текстовый протокол SLCAN.
Подключенный по USB 2.0 контроллер также выполняет роль USB-to-CAN шлюза и позволяет обеспечить доступ управляющих компьютеров с ОС Windows или ОС Linux ко всей сети CANbus. Таким образом, через единый интерфейс USB 2.0 к компьютеру с ОС Windows или Linux можно подключить «гирлянду» контроллеров СЕРВОСИЛА для управления целым комплексом электроприводов, например, в составе испытательного стенда, АСУ ТП или мобильного робота, а также любые другие устройства, поддерживающие шину CANbus, например, инерциальные датчики или GPS приемник.
К ОС Linux контроллеры СЕРВОСИЛА подключаются либо по интерфейсу CAN, либо по интерфейсу USB 2.0. В случае подключения по CANbus управляющие пользовательские программы могут использовать стандартный Linux SocketCAN API для посылки команд в контроллеры СЕРВОСИЛА и для получения телеметрии в обратном направлении. В сети Интернет можно найти примеры исходного кода множества программ, работающих через SocketCAN API.
Если же контроллер СЕРВОСИЛА подключен к Linux через интерфейс USB 2.0 (а не через CANbus), то контроллер идентифицируется в Linux, как виртуальный COM-порт, также, как и в ОС Windows. В этом случае управляющие пользовательские программы могут использовать либо стандартный Linux SocketCAN API через встроенный в Linux драйвер SLCANd, либо же работать с виртуальным COM-портом напрямую с использованием стандартного текстового протокола команд SLCAN.
При подключении через USB 2. 0 к ОС Linux контроллер также может выполнять функцию USB-to-CAN шлюза и обеспечить доступ ОС Linux ко всей сети CANbus. Эта функция полезна в случае, если управляющая компьютерная система с ОС Linux не имеет своего собственного физического CANbus порта. В этом случае контроллеры СЕРВОСИЛА могут играть вспомогательную роль интерфейсного адаптера USB-в-CANbus.
0 к ОС Linux контроллер также может выполнять функцию USB-to-CAN шлюза и обеспечить доступ ОС Linux ко всей сети CANbus. Эта функция полезна в случае, если управляющая компьютерная система с ОС Linux не имеет своего собственного физического CANbus порта. В этом случае контроллеры СЕРВОСИЛА могут играть вспомогательную роль интерфейсного адаптера USB-в-CANbus.
Для разработки программ, управляющих контроллерами СЕРВОСИЛА через CAN или USB 2.0, в общем случае не требуются какие-либо специализированные библиотеки, SDK или средства разработки кроме тех, которые уже имеются в стандартных ОС Linux и Windows. Разрабатывать программы можно на языках C/C++, Java, Python, MATLAB, или любых других, которые могут работать с виртуальными COM-портами, со стандартным SocketCAN API в Linux, или же программных пакетов или ПЛК, которые уже имеют встроенную поддержку CANopen, например, LabView.
Программное обеспечение “Сервоскоп”
В комплект поставки входит программное обеспечение «Сервоскоп», которое автоматизирует процесс настройки контроллеров под конкретный электродвигатель и позволяет строить графики и получать отладочную телеметрию с электроприводов по сети CANbus или USB 2. 0. Данное графическое программное обеспечение работает как под ОС Windows 10/8, так и под ОС Linux, в том числе, на популярных дистрибутивах Debian и Ubuntu. Установка драйверов не требуется.
0. Данное графическое программное обеспечение работает как под ОС Windows 10/8, так и под ОС Linux, в том числе, на популярных дистрибутивах Debian и Ubuntu. Установка драйверов не требуется.
Симулятор электроприводов
Для упрощения отладки пользовательского управляющего программного обеспечения в комплект поставки входит программный симулятор контроллера СЕРВОСИЛА. Программный симулятор распространяется бесплатно в составе программного обеспечения «Сервоскоп». Этот симулятор полностью воспроизводит управляющий интерфейс CANbus/CANopen контроллеров СЕРВОСИЛА и позволяет отлаживать пользовательское программное обеспечение управления электроприводом без риска повредить реальный электродвигатель или редуктор электропривода.
Технические характеристики
| Параметр | Значение |
|---|---|
| Поддерживаемые типы двигателей | Бесколлекторые (brushless): PMSM, BLDC. Коллекторные (brushed): только open loop режим. Соленоиды: только open loop режим. |
| Максимальный ток через фазу двигателя | 25 А (желательно с радиатором) |
| Номинальный (рекомендуемый) ток через фазу двигателя | 15 А (желательно с радиатором, но обычно не требуется) 12 А (без радиатора) |
| Входное напряжение питания | 7-60 V DC |
| Режимы управления бесколлекторными двигателями | Стабилизация момента на валу. Стабилизация скорости (ESC). Сервоуправление. Прямое управление (Direct Drive). Тормоз вала. Рекуперация (электрогенератор). Системная идентификция (автонастройка). |
| Встроенные алгоритмы управления бесколлекторными двигателями | Field-Oriented Control (FOC), EMF Observer, Hall Sensors Observer, D-Q axis Coupling Compensation, Field Weakening, Защиты, Управление динамикой разгона-торможения.  |
| Функция автонастройки под электродвигатель | Есть |
| Интерфейсы к датчикам положения вала (энкодерам) | Квадратурный с индексным сигналом, BISS/C, SSI, ШИМ, SPI |
| Максимальное разрешение датчика положения вала | 20 бит |
| Встроенный шлюз сетей управления | USB-to-CANbus шлюз Поддерживаются 11-битные и 29-битные идентификаторы шины CANbus. |
| Управляющие интерфейсы | Шина CAN: протокол CANopen с 11-битными идентификаторами. USB 2.0: виртуальный COM-порт с текстовым протоколом SLCAN. |
| Количество последовательно подключенных контроллеров («гирлянда») в единой цепочке управления и питания: | До 127 шт через шину CANbus. До 16 шт через встроенный USB-to-CANbus шлюз. |
| Терминальное сопротивление 120 Ом для шины CANbus | Есть. Включается-выключается посредством джампера. Включается-выключается посредством джампера. |
| Возможные варианты скорости передачи данных по шине CAN | 1 мбит/сек 500 кбит/сек 250 кбит/сек 125 кбит/сек 100 кбит/сек 50 кбит/сек |
| Количество CANbus портов | 2 шт (параллельные) |
| Количество USB 2.0 портов | 1 шт |
| Поддерживаемые операционные системы | Windows 10, 8 (драйвер не требуется) Linux (драйвер не требуется): Debian, Ubuntu, Astra Linux, Raspberry PI OS и другие. |
| Интерфейсы и API для программного управления | Linux SocketCAN API, CANopen, Текстовый протокол SLCAN через виртуальный COM-порт (USB2.0) для Windows 10, 8 и Linux. |
| Программный симулятор программного интерфейса CANbus контроллера для отладки управляющего программного обеспечения без двигателя | Есть |
| Габариты модели SC-25R (прямоугольной формы) | 68мм x 40мм x 16мм |
| Габариты модели SC-25С (круглой формы) | Диаметр 62 мм, высота 16 мм |
| Масса | ~50 гр (без радиатора) |
| Энергопотребление в режиме ожидания при неработающем двигателе | 120-180 мА |
| |||||
| |||||
| |||||
| |||||
| |||||
| |||||



Контроллеры управления электродвигателями
Миром правит электричество. Поэтому вопрос его экономного расходования стоит на первом месте в ряду общих проблем. Статистика утверждает, что 45 % производимой энергии потребляют электродвигатели, которые используются практически везде — в домашней технике, в офисах,на любом производстве, на транспорте всех видов. Поэтому практически все электромоторы имеют контроллер электродвигателя.
Поэтому вопрос его экономного расходования стоит на первом месте в ряду общих проблем. Статистика утверждает, что 45 % производимой энергии потребляют электродвигатели, которые используются практически везде — в домашней технике, в офисах,на любом производстве, на транспорте всех видов. Поэтому практически все электромоторы имеют контроллер электродвигателя.
Что такое контроллер и зачем он нужен
Контроллер — особое электронное или электромеханическое устройство, управляющее работой системы автоматизации любого уровня.
Электронные контроллеры представляют собой отдельные платы или цельные блоки, которые принимают сигналы с датчиков, обрабатывают их и отправляют команды на исполнительные устройства. Они поддерживают заданные рабочие параметры, следят за климатическим условиями в помещениях, выполняют другие разнообразные функции.
Контроллеры для электродвигателей выполняют следующие функции:
- управление скоростью вращения вала двигателя;
- защита двигателя от перегрева, перепадов тока или напряжения;
- поиск неисправностей;
- перераспределение энергии.
Результат их применения — снижение затрат материальных и трудовых ресурсов, экономия электроэнергии, повышение производительности и безопасности функционирования силовой аппаратуры.
Электромеханические контроллеры обычно применяют для управления работой электродвигателей большой мощности в силовых установках морских судов, подъёмной техники или горнодобывающего оборудования — там, где значение рабочего тока определяется десятками и сотнями ампер. Это уже не компактные модули, которые можно легко перенести с места на место вручную. Это уже полноценные монтажные шкафы, где собраны в единую систему комплекты выключателей, рычагов, другое оборудование. Назначение таких контроллеров — дистанционное включение/отключение или торможение электромоторов, регулирование хода, обеспечение их безопасности и надёжности их работы.
Где купить контроллеры для электродвигателей
Интернет-магазин «Глория-Прогресс» предлагает купить контроллеры кулачковые серии КВ и магнитные серии ВТ для создания надёжных систем управления двигателями судового оборудования по ценам, укладывающимся в любой бюджет.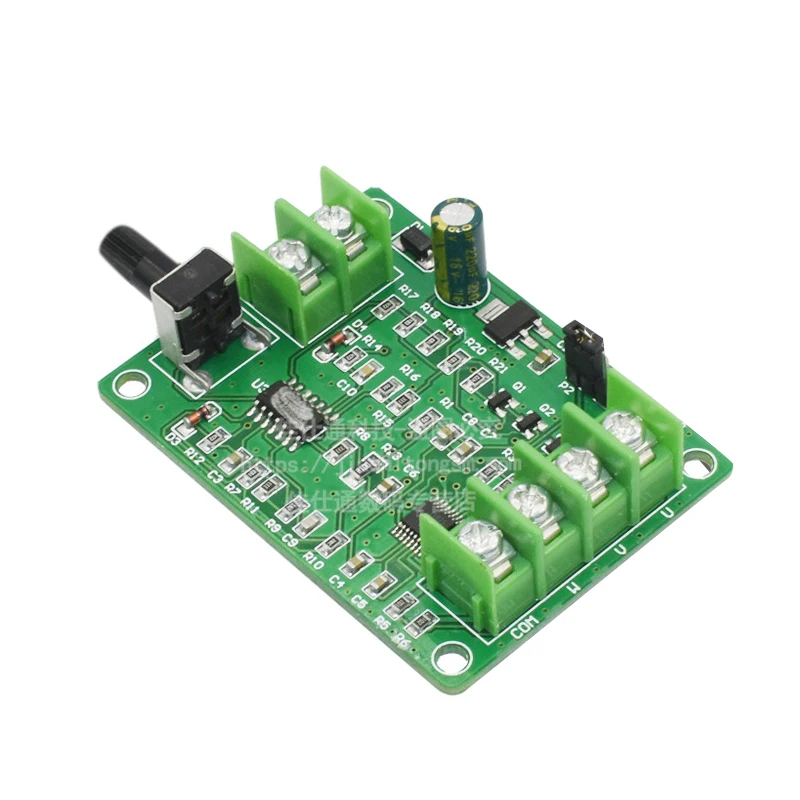 Подробные сведения о моделях и их стоимость приведены в каталоге. Все устройства проходят предпродажное тестирование.
Подробные сведения о моделях и их стоимость приведены в каталоге. Все устройства проходят предпродажное тестирование.
Контроллерное управление электродвигателем | БЛОГ ЭЛЕКТРОМЕХАНИКА
Контроллерное управление применяется главным образом для электродвигателей постоянного тока повторно-кратковременного режима работы. Оно предусматривает, помимо пуска и остановки также регулирование скорости вращения, изменение направления вращения (реверсирование) и торможение электродвигателя. Кроме того, при контроллерном управлении часто осуществляют защиту электродвигателей от ненормальных условий работы: перегрузки, понижения или исчезновения напряжения в питающей его сети. Такая защита достигается при помощи релейно-контакторной аппаратуры.Релейно-контакторная аппаратура размещается на особой, так называемой защитной панели, встраиваемой в контроллер или монтируемой отдельно от него.
Регулирование скорости вращения электродвигателя постоянного тока при контроллерном управлении чаще всего осуществляется при помощи сопротивлений, включаемых в цепь якоря.
Рис. 1. Сопротивление параллельно цепи якоря
Рис. 2. Динамическое торможение электродвигателя
Иногда при малых нагрузках падение напряжения на зажимах последовательно включенного сопротивления оказывается недостаточным для получения низкой скорости вращения электродвигателя. В этом случае, кроме последовательного сопротивления, применяют еще сопротивление, подключаемое параллельно цепи якоря (рис. 1).
Низкая устойчивая скорость вращения электродвигателя («ползучая» скорость) получается потому, что в этом случае падение напряжения на зажимах якоря обусловливается не только током якоря, а суммой токов, проходящих по якорю Iя и по параллельно включенному сопротивлению Iш.
Довольно часто в схемах контроллерного управления применяют комбинированный способ регулирования скорости вращения: понижение номинальной скорости достигается введением сопротивления в цепь якоря, а повышение — введением сопротивления в цепь параллельной обмотки возбуждения.
Изменение направления вращения электродвигателей обычно достигается изменением направления тока в цепи якоря.
Электрическое торможение двигателя осуществляется одним из трех способов. Рекуперативное торможение чаще всего предусматривается в схемах управления грузовыми лебедками. При опускании тяжелого груза его вес может разогнать электродвигатель до скорости, превышающей скорость вращения холостого хода. Так как обмотка возбуждения электродвигателя включена на полное напряжение сети, то противоэлектродвижущая сила двигателя становится выше приложенного напряжения и электродвигатель начинает отдавать энергию в сеть, в связи с чем он и затормаживается. Никаких специальных переключений схемы в режиме рекуперативного торможения в этом случае не требуется, и оно осуществляется автоматически, когда скорость вращения двигателя увеличивается сверх допустимой.
Для динамического торможения якорь электродвигателя отключается от питающей сети и замыкается на сопротивление торможения (рис. 2).
2).
При этом у электродвигателя параллельного возбуждения обмотка возбуждения остается включенной на полное напряжение сети (рис. 2, а), а у электродвигателя последовательного возбуждения эта обмотка отключается от якоря и получает питание от сети через добавочное сопротивление (рис. 2, б).
У электродвигателей смешанного возбуждения динамическое торможение осуществляется при отключенной последовательной обмотке и при питании параллельной обмотки возбуждения от полного напряжения сети. При динамическом торможении направление тока в якоре электродвигателя меняется на обратное, так как напряжение сети равно нулю.
Эффективность динамического торможения зависит от величины тормозного сопротивления. Чем это сопротивление меньше, тем больше ток, отдаваемый якорем, и тем быстрее двигатель останавливается. Однако по мере уменьшения скорости вращения ток, отдаваемый электродвигателем, уменьшается и эффективность торможения снижается.
Торможение противотоком производится изменением полярности приложенного к якорю двигателя напряжения. При этом двигатель в момент остановки отключается от сети, так как иначе он начнет вращаться в противоположную сторону. Следовательно, торможение противотоком имеет место у каждого реверсируемого электродвигателя, если реверс производится до остановки двигателя.
При торможении противотоком знак э. д. с. электродвигателя остается прежним, а знак приложенного напряжения меняется и совпадает со знаком э. д. с. Поэтому величина тока, проходящего через якорь электродвигателя, увеличивается почти вдвое против имеющей место при нормальном пуске, даже в случае наличия в цепи якоря (в момент торможения противотоком) пускового сопротивления.
На рис. 3 изображена схема контроллерного управления электродвигателем параллельного возбуждения. Схема предусматривает пуск, реверсирование и торможение электродвигателя. При включении рубильника Р в нулевом положении контроллера обмотка возбуждения электродвигателя подключается на полное напряжение сети.
В положении контроллера «I вперед» ток от зажима плюс сети через контакты 10 и 9 контроллера проходит через якорь и дополнительные полюсы электродвигателя; далее через искрогасительную катушку ИК, контакты 1 и 2 контроллера ток, пройдя все пускорегулирующее сопротивление P1 — P4, через зажимы 6,8 и 7 возвращается в минус сети. Электродвигатель начинает вращаться с наименьшим числом оборотов.
Электродвигатель начинает вращаться с наименьшим числом оборотов.
Рис. 3. Схема контроллерного управления электродвигателем параллельного возбуждения
В положении контроллера «II вперед» из цепи выводится сопротивление P1, вследствие чего электродвигатель увеличивает скорость вращения.
В последующих положениях («III, IV и V вперед») поочередно выводятся сопротивления Р2, Р3, P4 и якорь электродвигателя, подключенный на полное напряжение сети, развивает номинальную скорость вращения. При повороте маховика контроллера из положения «V вперед» в нулевое якорь электродвигателя отсоединяется от сети и подключается на тормозное сопротивление СТ. Так как обмотка возбуждения осталась включенной, электродвигатель переходит в режим динамического торможения.
При повороте маховика контроллера в положение «I назад» ток от зажима + (плюс) сети через контакты контроллера 10, 11, 8 и 6 проходит через пускорегулирующее сопротивление в направлении от P4 к P1; затем через контакты 2, 1, через катушку ИК, дополнительные полюсы, через якорь электродвигателя, зажимы 9 и 7 контроллера ток возвращается в — (минус) сети.
Таким образом, ток в якоре изменяет направление, что при неизменном направлении потока влечет реверс электродвигателя.
Если из положения «V назад» (или V вперед») перевести маховик контроллера в положение «I вперед» (или «I назад»), не дожидаясь остановки электродвигателя при нулевом положении контроллера, то начинается торможение электродвигателя противотоком через пусковое сопротивление P1— P4.
Сопротивление PC, включенное параллельно обмотке возбуждения, служит для ее защиты от повышения напряжения при выключении рубильника Р.
Контроллер мотора – обзор
Комментарии к Control
Полное изучение контроллеров мотора выходит за рамки этого текста. Я был бы упущен, если бы не упомянул, насколько важно для электрика разбираться в этой части схемы двигателя. Без хороших практических навыков работы по контролю электрик будет плохо подготовлен к работе с двигателями. Это важная тема, требующая дальнейшего изучения электриком, который хочет оставаться в курсе событий отрасли.
Постоянный рост сложности схем управления двигателями происходит почти ежедневно. Не так давно числовое управление было провозглашено окончательным средством управления двигателем. Сейчас мы наблюдаем рост использования твердотельных устройств, которые используют цифровую логику в этих механизмах управления. Сначала для этих целей были введены дискретные компоненты, такие как транзисторы. Эти отдельные компоненты стремительно уступают место интегральным схемам. Интегральная схема может иметь сотни транзисторов с соответствующими схемными компонентами, которые будут использоваться в качестве переключателей.Тем не менее, все эти части содержатся в чипе размером не больше миниатюры.
В середине 1950-х, когда я учился в Университете Иллинойса, мне посчастливилось услышать Норберта Винера, отца кибернетики. Доктор Винер, умерший в 1964 году, был математиком и логиком. Он сыграл важную роль в разработке высокоскоростного компьютера. Он получил степень бакалавра в Университете Тафтса в возрасте 14 лет.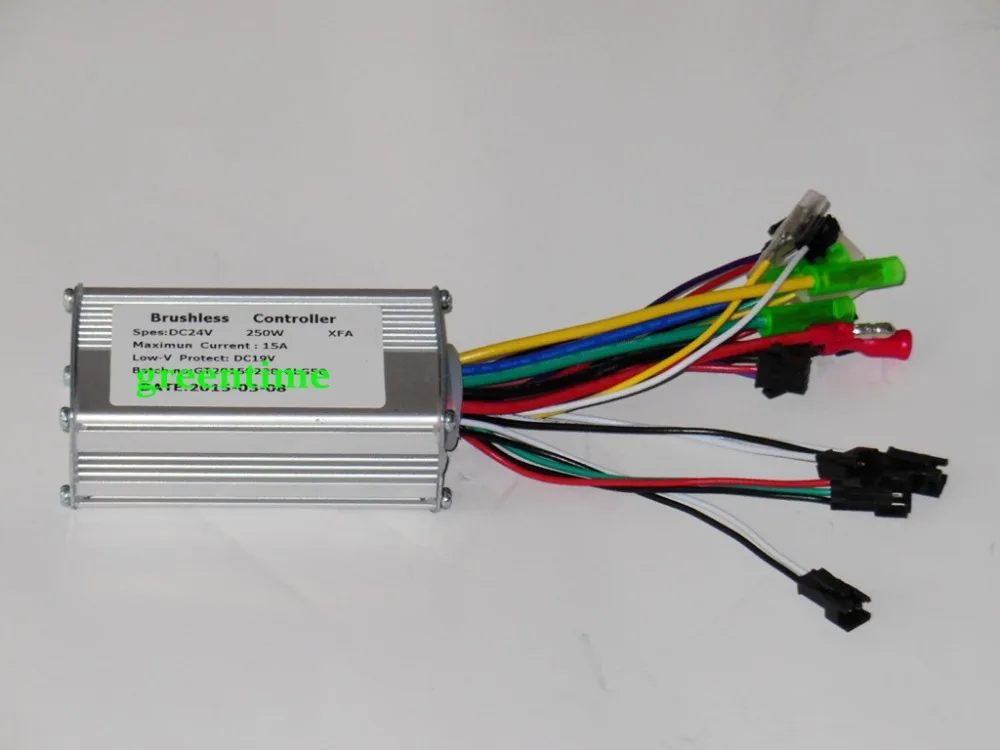 Он получил свою первую докторскую степень в Гарвардском университете в возрасте 18 лет.
Он получил свою первую докторскую степень в Гарвардском университете в возрасте 18 лет.
Dr.Винер выполнил университетские требования для получения докторской степени в нескольких областях. Я не помню точно области или количество, но я считаю, что они включали работы в областях математики, электротехники, химии, физики и медицины.
Доктор Винер ввел термин «кибернетика» и использовал его в качестве названия одной из своих книг, опубликованных в 1948 году. Кибернетика – это отрасль науки, которая объединяет области изучения коммуникаций и механики устройств, которые выполнять работу.
Основная часть исследований доктора Винера была связана с обратной связью информации от нагрузки к контроллеру для улучшения настроек механизмов. Он предложил совместное изучение коммуникаций и управления в рамках дисциплины кибернетика.
В целом, работники двух полей мало знали о другом или не знали его вообще. Конечной целью было объединение полностью автоматического завода с компьютером. Робототехника, используемая в производстве, является результатом исследования доктора Винера.
Робототехника, используемая в производстве, является результатом исследования доктора Винера.
В компьютерах 1940-х и в начале и середине 50-х годов в основном использовались электронные лампы. (Транзистор был изобретен в 1947 году.) Они были большими, громоздкими и потребляли значительную электрическую мощность. Темой доктора Винера в тот день, когда я услышал его выступление, был биологический компьютер. Д-р Винер отметил, что система внутреннего контроля и коммуникации внутри человека была похожа на то, что мы очень примитивно пытаемся использовать с машинами. Например, большинство людей могут поднять яйцо, не разбив его. Для машины, выполняющей ту же функцию, один и тот же процесс становится очень сложным.
Доктор Винер предположил, что если человеческий мозг может быть биологически живым после смерти человека, его можно будет использовать в качестве биологического компьютера, который может хранить информацию, анализировать ее и посылать управляющие сигналы на механические устройства, чтобы произвести желаемые изменения.

Это то, что человек-оператор любой машины делает в повседневной жизни. Человеческий мозг, используемый в качестве блока управления компьютером, будет намного меньше и мощнее любого компьютера, существовавшего в то время или возможного в обозримом будущем.
После вступительного слова доктора Винера я должен признать, что очень мало понял из того, что он хотел сказать. Он пытался объяснить нам свою математическую систему вероятностей, которая могла предсказать выходной сигнал человеческого мозга, когда ему давали единственный входной импульс постоянного тока. В конце своей лекции доктор Винер спросил: «Джентльмены, знаете ли вы, какова вероятность предсказания работы человеческого мозга для одного простого ввода?» Далее он ответил на свой вопрос: «Господа, это 16 факториал (16 × 15 × 14… × 1) в 23 степени.Джентльмены, я полагаю, что такого чертова числа не существует.
Биологический компьютер может стать реальностью, а может и не стать. Но электронный компьютер стал реальностью, и его применение и распространение продолжают расти и во многих отношениях влияют на нашу повседневную жизнь. Скорость и эффективность компьютеров, а также их способность решать очень сложные задачи повышаются с каждым днем. В некоторых операциях компьютеры уже работают лучше, чем человеческий мозг. Они могут хранить гораздо больше информации и лучше извлекать эту информацию.Что еще более важно, их результаты предсказуемы.
Скорость и эффективность компьютеров, а также их способность решать очень сложные задачи повышаются с каждым днем. В некоторых операциях компьютеры уже работают лучше, чем человеческий мозг. Они могут хранить гораздо больше информации и лучше извлекать эту информацию.Что еще более важно, их результаты предсказуемы.
Большой прорыв в компьютерных технологиях сегодня – это программы искусственного интеллекта, имитирующие человеческий мозг. Вы когда-нибудь играли в шашки или шахматы против компьютера?
Твердотельные программируемые контроллеры – хорошие примеры того, как промышленность сегодня использует кибернетику. Эти устройства представляют собой компьютеры, которые легко работают с двигателями, которые защищены или управляются несколькими пилотными устройствами. Эти устройства заменяют функции переключения ручного и магнитного управления твердотельными устройствами и включают в себя мощность компьютерной логики для обеспечения правильной работы двигателя в нужное время. По мере того, как сложность этих современных схем увеличивается, уровень знаний и понимания электрика также должен идти в ногу с тем, чтобы устанавливать, обслуживать, ремонтировать и заменять двигатели, используемые программаторами с компьютерным управлением.
По мере того, как сложность этих современных схем увеличивается, уровень знаний и понимания электрика также должен идти в ногу с тем, чтобы устанавливать, обслуживать, ремонтировать и заменять двигатели, используемые программаторами с компьютерным управлением.
Контроллеры двигателей для промышленных транспортных средств
Разнообразный ассортимент контроллеров, предлагающих управление двигателем переменного тока, управление двигателем постоянного тока с постоянным магнитом и управление двигателем с независимым возбуждением, подходящих для широкого спектра электромобилей, таких как тележки для поддонов, штабелеры, тягачи, вилочные погрузчики или любые другие типы аккумуляторных транспортных средств.Все продукты предлагают отличное сочетание компактной и прочной конструкции, мощности, производительности, функциональности и стоимости.
65Контроллеры двигателей: Назначение
Контроллеры двигателей используются для постепенного запуска, остановки и запуска двигателей запрограммированным образом. Они подают напряжение и подают сигналы на моторные приводы. Они также могут постепенно увеличивать скорость двигателя или крутящий момент или изменять направление вращения двигателя.
Они подают напряжение и подают сигналы на моторные приводы. Они также могут постепенно увеличивать скорость двигателя или крутящий момент или изменять направление вращения двигателя.
Типы контроллеров двигателей
Существует два основных типа контроллеров двигателей: электронные и электромеханические.
Электронные блоки включают плавный пуск и частотно-регулируемые приводы и считаются сложными компонентами. Их можно запрограммировать так, чтобы они реагировали на системные входные сигналы и заранее заданные рабочие условия.
В электромеханических устройствах используются электромагнитные контакторы или реле для остановки, запуска и изменения направления вращения двигателя.
Контроллеры двигателей переменного тока
Контроллеры двигателей переменного тока – это электронные устройства, которые изменяют входную мощность двигателей, обычно регулируя частоту питания двигателя для регулирования выходной скорости и крутящего момента.Используемые в основном в технологических процессах для управления скоростью, они известны как приводы с регулируемой скоростью или частотно-регулируемые приводы.
Контроллеры двигателей постоянного тока
Контроллеры двигателей постоянного тока– это электрические устройства, которые изменяют входную мощность, регулируя источник постоянного или переменного тока на импульсный выход постоянного тока с изменяющейся длительностью или частотой импульса.
Контроллеры серводвигателей
Контроллеры серводвигателей– это электронные устройства, которые изменяют входную мощность, настраивая источник постоянного или переменного тока на импульсный, токовый выход с изменяющейся длительностью или частотой импульса.Серводвигатели используются во многих приложениях, включая станки, микропозиционирование и робототехнику, а также многие другие типы оборудования, такие как конвейеры или системы привода шпинделя. Контроллер, обычно интегрированный со схемами привода, подает управляющие сигналы на привод. Сервоприводы также известны как усилители серводвигателей.
Контроллеры шаговых двигателей
Контроллеры шаговых двигателей – это электронные устройства, которые изменяют входную мощность, настраивая источник постоянного или переменного тока на импульсный или «ступенчатый» выходной ток. Контроллеры шаговых двигателей используются в основном в приложениях управления движением в производственных и строительных средах, среди прочего, и управляют скоростью, крутящим моментом и положением двигателя.
Контроллеры шаговых двигателей используются в основном в приложениях управления движением в производственных и строительных средах, среди прочего, и управляют скоростью, крутящим моментом и положением двигателя.
Часто задаваемые вопросы:
Какие бывают типы контроллеров мотора?
Существует четыре основных типа контроллера мотора и привода:
- Контроллеры двигателей переменного тока
- Бесщеточные контроллеры двигателей постоянного тока
- Контроллеры серводвигателей
- Контроллеры шаговых двигателей
Зачем мне нужен контроллер мотора?
Контроллер мотора является необходимым компонентом, потому что микроконтроллер обычно может предоставлять только 0.1 Ампер тока. Требования к большинству приводов (электродвигатели постоянного тока, редукторные электродвигатели постоянного тока, серводвигатели и т. Д.) Выше, чем это, и требуют нескольких ампер. Ток, который использует двигатель, зависит от крутящего момента, который он может обеспечить; например, небольшой двигатель не будет потреблять много тока, но не может перемещать большую массу.
Как выбрать контроллер мотора?
Обычно контроллеры двигателей можно выбрать только после того, как вы выбрали двигатели или приводы. Это делается так, потому что вы должны учитывать, что ток, потребляемый двигателем, связан с крутящим моментом, который он может обеспечить.Таким образом, вы должны согласовать то, что будет работать для каждого компонента.
Контроллер двигателя SPARK – REV Robotics
НАЗАД! По просьбе сообщества REV вернул оригинальный контроллер двигателя SPARK. Этот контроллер мотора был рабочей лошадкой, часто используемым щеточным контроллером постоянного тока, k , известным своей прочностью, простотой использования и доступностью в FRC на протяжении многих лет.
Мы создали единый производственный цикл оригинального контроллера двигателя SPARK для сезона FRC 2020, если товар будет распродан, мы не будем пополнять его запасы в течение сезона.
Контроллер мотора REV Robotics SPARK – это недорогой щеточный контроллер мотора постоянного тока, разработанный для того, чтобы команды FIRST® Robotics Competition могли больше окупаться.
Spark имеет постоянный ток 60 А с пассивным охлаждением, двунаправленные входы концевых выключателей для интеллектуального управления механизмом, светодиодный индикатор состояния RGB и активируемый кнопкой режим торможения / выбега.
Характеристики
- Пассивное охлаждение
- Синхронное выпрямление
- Входы концевых выключателей
- Автоматически останавливает прямое и / или обратное движение
- Программирование не требуется
- Совместимость с нормально разомкнутыми (НО) концевыми выключателями
- Калибровка
- Заводская калибровка для входного сигнала 1 мс – 2 мс
- Калибровка пользователем
- Встроенный фиксатор кабеля для порта ШИМ
- Зажимные винтовые клеммы
- Улучшенная площадь контакта и удержание
- Светодиодный индикатор состояния RGB
- Подробная информация о режиме и работе
Технические характеристики
- Входное напряжение (номинальное): 12 В
- Постоянный ток: 60 А
- Пиковый ток (2-секундный скачок): 100 А
- Диапазон ширины входного импульса (номинальный): 1 мс – 2 мс
- Разрешение входа: 1 мкс
- Зона нечувствительности входа: 40 мкс 90 074
- Выходная частота: 15.
 625 кГц
625 кГц - Диапазон выходного напряжения: 0 В – ± Vin
- Максимальное разрешение выходного напряжения: 0,001xVin
- Размеры: 2,860 ″ x 1,875 ″ x 0,868 ″
- Вес: 74 г / 2,61 унции
Содержимое комплекта
- QTY 1 – Контроллер двигателя SPARK
- КОЛ-ВО 1 – Кабель ШИМ – 36 ″ – 22 AWG
- КОЛ-ВО 2 – Дополнительные винты клемм – M3
Документация
CAD
- SKU-STP
- AllREVPartsSTEPzip
Контроллеры двигателей для судостроения Платформы (MIL-SPEC)
Гордо выставлен на каждом U.Продукты управления двигателями Leonardo DRS, воюющие со времен Второй мировой войны, зарекомендовали себя в самых суровых условиях эксплуатации.
Благодаря более чем столетнему опыту работы, Leonardo DRS предлагает стандартные и настраиваемые моторные приводы в соответствии с вашими потребностями при строительстве или модернизации. Мы можем разработать наши индивидуальные контроллеры для упрощения установки или включения базовой логики опережения / задержки / ожидания, устраняя необходимость в дополнительном оборудовании для упрощения ваших судовых потребностей.
Leonardo DRS – лидер в предоставлении решений MIL-SPEC для требовательного морского рынка.В наших новаторских конструкциях используются новейшие технологии. Автономный контроллер процессов объединяет стандартное военное оборудование с контроллером двигателя MIL-SPEC, чтобы обеспечить компактное, легкое и экономичное решение. Контроллер процессов, соответствующий требованиям MILSPEC, используется на новейших кораблях ВМС США для управления насосами и предназначен для работы в суровых морских условиях на протяжении всего срока службы корабля.
MSPC (контроллеры процессов MIL-SPEC), предназначенные для нового судостроения или модернизации, идеально подходят для интегрированного управления, технического обслуживания на основе состояния, мониторинга мощности и взаимодействия с судовыми сетевыми коммуникациями.Элементы управления и индикаторы функционально сгруппированы на контроллере, чтобы оптимизировать человеческий интерфейс, наглядность и простоту использования.
ОСНОВНОЕ:
- Распределенная система управления архитектурой
- Эффективная и надежная работа
- Автономное управление
- Расширяемый аналоговый и дискретный ввод / вывод
- Расширяемый светодиодный экран
- Аналоговые дисплеи для считывания
- Диагностика системы
- Удаленная связь PROFIBUS
- ВМС с электронным двигателем
- Пользовательские кривые отключения при тепловой перегрузке
- Определение тока полной нагрузки от 0.
 От 5 до 150 ампер
От 5 до 150 ампер - Измерение напряжения от 50 до 550 В
Продукция Leonardo DRS постоянно развивается, поскольку наша компания смотрит на будущие потребности ВМФ. Leonardo DRS предлагает передовые разработки продуктов, производство мирового класса и глобальные инженерные услуги и поддержку, от продуктов для распределения энергии и электрического управления до автоматизации управления судном.
Моторные приводы, контроллеры моторов | Axiomatic Technologies Corporation
Моторные приводы, контроллеры двигателей | Axiomatic Technologies Corporation Axiomatic предлагает множество передовых электронных компонентов управления для управления двигателями постоянного и переменного тока, а также двигателями с постоянными магнитами, используемыми в мобильном оборудовании и системах промышленной автоматизации по всему миру.Благодаря почти 25-летнему опыту, наше проверенное оборудование и удобное программное обеспечение обеспечивают гибкость простых или сложных электронных систем и систем управления движением.
Мы работаем с системными интеграторами и производителями комплектного оборудования для разработки точных решений по управлению двигателями в качестве поставщика компонентов. Свяжитесь с Axiomatic для получения готового компонента или решения OEM, которое соответствует вашим требованиям.
Принадлежности
P / N: AX070502 – КОМПЛЕКТ электронного помощника
Последняя версия электронного помощника доступна в Интернете.Зайдите в Войти и введите свой пароль клиента.
P / N: AX070100 – Комплект жгута проводов для P / N AX100100. В комплект входят: P / N AX070102 (жгут проводов CAN и I / O, 2 м), P / N AX070103 (жгут проводов питания и управления двигателем, 2 м), P / N AX070101 (жгут проводов RS-232)
P / N: AX070101 – Жгут проводов для P / N AX100300. В комплекте: жгут проводов RS-232 с разъемом DB-9, 2 м
P / N: AX070105 – Комплект ответных заглушек для P / N AX100050.В комплект входят: DT06-12SA, W12S, 12 0462-201-16141, 3 заглушки
Моторные приводы с CAN (SAE J1939 или CANopen)
с CAN (SAE J1939 или CANopen)
Моторные приводы постоянного тока
Номер детали: AX100100
12/24 В постоянного тока, 25 А Выход
Номер детали: AX100270
Универсальный контроллер двигателя DC / BLDC, SAE J1939
Номер детали: AX100271
Универсальный контроллер двигателя DC / BLDC, CANopen
Номер детали: AX100280
Контроллер мотора 48V BLDC, SAE J1939
Номер детали: AX100281
Контроллер мотора 48V BLDC, CANopen
Номер детали: AX100310
Однонаправленный щеточный контроллер двигателя постоянного тока, вход энкодера, SAE J1939
Номер детали: AX100311
Однонаправленный щеточный контроллер двигателя постоянного тока, вход энкодера, CANopen
Номер детали: AX100600
5A Двунаправленный, шина CAN SAE J1939, 1 вход управления
Номер детали: AX102000
40A Двунаправленный контроллер двигателя постоянного тока, SAE J1939, с вводом / выводом
Номер детали: AX102100
40A Двунаправленный контроллер двигателя постоянного тока, SAE J1939
Номер детали: AX105000
Контроллер двигателя постоянного тока 150A, SAE J1939
Привод шагового двигателя
Номер детали: AX100700
Привод шагового двигателя, SAE J1939
Привод с двумя шаговыми двигателями
Номер детали: AX100750
Привод с двумя шаговыми двигателями, SAE J1939
Моторные приводы BLDC
Номер детали: AX100240
Контроллер двигателя BLDC, 50 Вт, SAE J1939
Номер детали: AX100250
35A Контроллер двигателя BLDC, SAE J1939
Номер детали: AX100260
Контроллер двигателя BLDC, 100 Вт, работа при высоких температурах, SAE J1939
Номер детали: AX100261
Контроллер двигателя BLDC, 100 Вт, высокотемпературный режим работы, CANopen
Номер детали: AX100270
Универсальный контроллер двигателя DC / BLDC, SAE J1939
Номер детали: AX100271
Универсальный контроллер двигателя DC / BLDC, CANopen
Двигатели и контроллеры | Festo MENA
Серводвигатели и контроллеры серводвигателей: система сервоприводов
Контроллер серводвигателя CMMP-AS разработан для динамических перемещений и требовательных приложений в машиностроении и строительстве. Как высокофункциональная сервоприводная система, она охватывает практически все приводные приложения. Он обеспечивает простой и гибкий способ адаптации модульных концепций станков к требованиям конкретного пользователя.
Как высокофункциональная сервоприводная система, она охватывает практически все приводные приложения. Он обеспечивает простой и гибкий способ адаптации модульных концепций станков к требованиям конкретного пользователя.
Контроллер серводвигателя (система сервопривода) CMMP-AS
- CMMP-AS-MO как базовый вариант со стандартными функциями
- CMMP-AS-M3 с возможностью расширения, e.грамм. для подключения EtherCAT или модуля безопасности
- Автоматический тормоз двигателя
- Управление скоростью и положением, управление током и крутящим моментом
- Позиционирование без рывков
- Бесступенчатое позиционирование в режиме замкнутого контура
- Измерение на лету и электронный кулачковый диск
- Гибкие программные концевые выключатели
Программные инструменты от Festo для интегрированной концепции от ввода в эксплуатацию до программирования и параметризации, включая унифицированное и простое управление:
- Festo Configuration Tool (FCT)
- Единый профиль данных FHPP
- Простая передача параметров и прошивки с помощью SD-карты
Встроенные функции безопасности:
- Безопасный останов с блокировкой повторного пуска
- Safe Torque Off (STO) до категории 4, PLe
Совместим с серводвигателем EMMS-AS, EMME-AS
- Бесщеточный серводвигатель с постоянным возбуждением
- 8 диапазонов крутящего момента
- Однооборотный энкодер (стандарт) или многооборотный энкодер (опция)
Контроллер серводвигателя CMMP-AS в каталоге
Серводвигатель EMMS-AS в каталоге
Серводвигатель EMME-AS в каталоге
Шаговые двигатели и контроллеры шаговых двигателей
Оба контроллера двигателей CMMO-ST и CMMS-ST представляют собой сервоприводную систему с обратной связью для шаговых двигателей. В качестве полноценной сервосистемы с замкнутым контуром они используют наилучшую возможную характеристическую кривую двигателя для наивысшей степени эксплуатационной безопасности и самого быстрого динамического отклика. В качестве альтернативы они могут использоваться как недорогая система с разомкнутым контуром с шаговыми двигателями без энкодера. CMMO-ST предлагает простую настройку системы и диагностику с помощью встроенного веб-браузера.
В качестве полноценной сервосистемы с замкнутым контуром они используют наилучшую возможную характеристическую кривую двигателя для наивысшей степени эксплуатационной безопасности и самого быстрого динамического отклика. В качестве альтернативы они могут использоваться как недорогая система с разомкнутым контуром с шаговыми двигателями без энкодера. CMMO-ST предлагает простую настройку системы и диагностику с помощью встроенного веб-браузера.
Контроллер шагового двигателя CMMO-ST
- Интерфейс ввода / вывода (7 свободно определяемых позиций через напрямую назначенные вводы / выводы)
- Разгон с ограничением рывка
- Контроль произвольно определенных положений и диапазонов крутящего момента
- Мониторинг различных переменных процесса, таких как крутящий момент, скорость, положение и время
- Режим позиционирования с дополнительным ограничением крутящего момента
- Силовой режим с дополнительным ограничением хода
- Скоростной режим с ограничением хода и усилия
Контроллер шагового двигателя CMMS-ST
- Автоматический тормоз двигателя
- Внешний тормозной резистор (опция)
- Позиционирование без рывков
- Бесступенчатое позиционирование
- Цифровые входы и выходы с защитой от короткого замыкания, перегрузки и напряжения обратной полярности
- Шаговое разрешение: полные шаги до 4000 шагов на оборот
Программные инструменты от Festo для интегрированной концепции от ввода в эксплуатацию до программирования и параметризации, включая унифицированное и простое управление:
- Festo Configuration Tool (FCT)
- Единый профиль данных FHPP
Встроенные функции безопасности:
- Safe Torque Off (STO) с категорией 3, PLd
Совместимость с шаговым двигателем EMMS-ST
- Двухфазная гибридная технология для длительного срока службы и бесперебойной работы
- Дополнительный энкодер для функции замкнутого контура
- Варианты с дополнительным моторным тормозом
Степень защиты:
- Корпус двигателя и разъемное соединение по IP65
- Подшипник вала двигателя IP54
Контроллер шагового двигателя CMMO-ST в каталоге
Контроллер шагового двигателя CMMS-ST в каталоге
Шаговый двигатель EMMS-ST в каталоге
Встроенный привод EMCA представляет собой законченное решение для позиционирования приводов или изменения формата и может быть установлен непосредственно в системе благодаря дополнительной высокой степени защиты IP65.
Определение положения с абсолютным энкодером:
- Стандарт: однооборотный
- Дополнительно: многооборотный
Встроенные функции безопасности:
- Safe Torque Off (STO) с категорией 3, PLd / SIL2
- Стояночный тормоз с управлением
Щелкните здесь, чтобы узнать больше о приводе EMCA
MC100D Контроллер бесщеточного двигателя
Эта серия цифровых, военизированных, низковольтных, 2-осевых, бесщеточных контроллеров двигателей предназначена для обеспечения замыкания контура крутящего момента, скорости и положения.Контроллер принимает командные сигналы от любой системы управления огнем в цифровом или аналоговом формате и взаимодействует с ручкой управления. Усовершенствованные алгоритмы пространственного вектора обеспечивают оптимальную производительность для новых или существующих двигателей, обеспечивая выдающуюся удельную мощность.
Усовершенствованные алгоритмы пространственного вектора обеспечивают оптимальную производительность для новых или существующих двигателей, обеспечивая выдающуюся удельную мощность.
Существует широкий спектр программируемых функций конечного пользователя:
Программно-программируемые функции:
- Расширенный встроенный тест
- Зоны, запрещенные для огня
- Зоны избегания препятствий
- Пределы демпфирования в конце
- Пределы ускорения
- Комплексная настройка петли
- Генератор внутренних функций
- Ослабление поля
- Функция формирования джойстика
- Аналоговые и цифровые входы / выходы
- История статуса и неисправностей
- Возможность регистрации данных
| Технические характеристики | |
|---|---|
| Блок питания | 18 В – 32 В постоянного тока номинальное |
| Температура (опорная плита) | -40oC + 65oC |
| Условия окружающей среды | Соответствует MIL-STD-810F |
| Команда крутящего момента / скорости / положения | через CAN-BUS |
| Спецификация ЭМС | Соответствует MIL-STD-461E |
| Неисправность / обратная связь о состоянии | через CAN-BUS |
| Масса | 7 кг (15. 4 фунта) 4 фунта) |
| Интерфейс датчика положения | SSI или последовательный интерфейс EnDat |
| Конверт | 312 x 210 x 102 мм (12,3 x 8,3 x 4,0 дюйма) |
| Самозащита | Перегрев / перегрузка по току |
| Выходной ток (для каждой оси) | 50 А пиковый, 25 А непрерывный |
| Опция: комплект стабилизации | 2-осевой гироскопический интерфейс |

