
Контроллеры движений – Mixed Reality
- Чтение занимает 12 мин
В этой статье
Контроллеры движения — это аппаратные аксессуары , которые позволяют пользователям выполнять действия в смешанной реальности.Motion controllers are hardware accessories that allow users to take action in mixed reality. Преимущество контроллеров движения над жестами заключается в том, что контроллеры имеют точную точку в пространстве, что позволяет детально регулировать взаимодействие с цифровыми объектами.An advantage of motion controllers over gestures is that the controllers have a precise position in space, allowing for fine grained interaction with digital objects.
Изображение: контроллер движения Windows Mixed RealityImage: A Windows Mixed Reality motion controller
Поддержка устройствDevice support
Сведения об оборудованииHardware details
Контроллеры движения Windows Mixed Reality обеспечивают точное и быстро отслеживаемое отслеживание перемещений в поле представления с помощью датчиков в иммерсивного гарнитуре.Windows Mixed Reality motion controllers offer precise and responsive movement tracking in your field of view using the sensors in the immersive headset.
Знакомство с контроллеромGet to know your controller
ОсобенностейFeatures:
- Оптическое отслеживаниеOptical tracking
- ТриггерTrigger
- Кнопка “захватить”Grab button
- ДжойстикThumbstick
- TouchpadTouchpad
НастройкаSetup
Перед началомBefore you begin
Требуется:You’ll need:
- Набор из двух контроллеров движения.
 A set of two motion controllers.
A set of two motion controllers. - Четыре батареи AA.Four AA batteries.
- ПК с поддержкой Bluetooth 4,0.A PC with Bluetooth 4.0 support.
Проверка обновлений для Windows, Unity и драйверовCheck for Windows, Unity, and driver updates
Связывание контроллеровPairing controllers
Контроллеры движения можно привязывать к основному компьютеру с помощью параметров Windows, таких как любое другое устройство Bluetooth.Motion controllers can be bonded with host PC using Windows settings like any other Bluetooth device.
- Вставьте две батареи AA в заднюю часть контроллера.Insert two AA batteries into the back of the controller. Пока не закрывайтеся батарея.Leave the battery cover off for now.
- Если вы используете внешний USB-адаптер Bluetooth, а не встроенный радиомодуль Bluetooth, ознакомьтесь с рекомендациями по Bluetooth , прежде чем продолжать.If you’re using an external USB Bluetooth Adapter instead of a built-in Bluetooth radio, review the Bluetooth best practices before proceeding.
 Для конфигурации рабочего стола с встроенным радио убедитесь, что антенна подключена.For desktop configuration with built-in radio, ensure antenna is connected.
Для конфигурации рабочего стола с встроенным радио убедитесь, что антенна подключена.For desktop configuration with built-in radio, ensure antenna is connected. - Открыть Параметры Windows -> устройства -> Добавить Bluetooth или другое устройство -> Bluetooth и удалить все более ранние экземпляры “контроллер движения — справа” и “контроллер движения — слева”.Open
- Выберите Добавить Bluetooth или другое устройство и посмотрите, как начать обнаружение устройств Bluetooth.Select Add Bluetooth or other device and see it starting to discover Bluetooth devices.

- Нажмите и удерживайте кнопку Windows контроллера, чтобы включить контроллер, выпустив его после посигнала.Press and hold the controller’s Windows button to turn on the controller, release once it buzzes.
- Нажмите и удерживайте кнопку связывания (вкладку в секции батареи), пока индикаторы не начнут пулсинг.Press and hold the pairing button (tab in the battery compartment) until the LEDs begin pulsing.
- В нижней части списка отобразится “контроллер движения — левый” или “контроллер движения — справа”.Wait “Motion controller – Left” or “Motion controller – Right” to appear to the bottom of the list. Выберите для связывания.Select to pair. Контроллер будет вибрировало при подключении.Controller will vibrate once when connected.
Изображение: выберите “контроллер движения” для связывания; Если имеется несколько экземпляров, выберите один из них в нижней части списка.Image: Select “Motion controller” to pair; if there are multiple instances, select one from the bottom of the list
- Вы увидите, что контроллер отображается в параметрах Bluetooth в категории “мышь, клавиатура, &ное перо” в разделе ” подключено
 You’ll see the controller appear in the Bluetooth settings under “Mouse, keyboard, & pen” category as Connected. На этом этапе вы можете получить обновление встроенного по — см. следующий раздел.At this point, you may get a firmware update – see next section.
You’ll see the controller appear in the Bluetooth settings under “Mouse, keyboard, & pen” category as Connected. На этом этапе вы можете получить обновление встроенного по — см. следующий раздел.At this point, you may get a firmware update – see next section. - Повторное подключение аккумулятора.Reattach battery cover.
- Повторите шаги 1-9 для второго контроллера.Repeat steps 1-9 for the second controller.
После успешного связывания обоих контроллеров параметры должны выглядеть следующим образом в категории “мышь, клавиатура, & перо” .After successfully pairing both controllers, your settings should look like the following, under “Mouse, keyboard, & pen” category
Изображение: контроллеры движения подключены
Image: Motion controllers connectedЕсли после связывания контроллеры отключены, их состояние будет отображаться как парные. If the controllers are turned off after pairing, their status will show up as Paired. Для контроллеров, которые постоянно находятся в категории “другие устройства”, связывание может быть выполнено только частично.For controllers permanently under the “Other devices” category, pairing may have only partially completed. В этом случае снова выполните связывание шагов, чтобы получить функциональный контроллер.In this case, run the pairing steps again to get controller functional.
If the controllers are turned off after pairing, their status will show up as Paired. Для контроллеров, которые постоянно находятся в категории “другие устройства”, связывание может быть выполнено только частично.For controllers permanently under the “Other devices” category, pairing may have only partially completed. В этом случае снова выполните связывание шагов, чтобы получить функциональный контроллер.In this case, run the pairing steps again to get controller functional.
Обновление встроенного по контроллераUpdating controller firmware
- Если к компьютеру подключена подвижная гарнитура с новым встроенным по контроллера, встроенное по будет автоматически отправлено на контроллеры движения при следующем включении.If an immersive headset is connected to your PC with new controller firmware is available, the firmware will be pushed to your motion controllers automatically the next time you turn them on. Обновления встроенного по контроллера обозначаются с помощью шаблона ИНДИКАТОРов освещения на круговом движении и занимает 1-2 минут.

- Убедитесь, что контроллеры работают правильно:Verify your controllers work properly:
- Запустите портал смешанной реальности и введите домашнюю страницу смешанной реальности.Launch Mixed Reality Portal and enter your Mixed Reality Home.
- Переместите контроллеры и проверьте отслеживание, проверка и работоспособность телетранспорта .Move your controllers and verify tracking, test buttons, and verify teleportation works. В противном случае ознакомьтесь с устранением неполадок контроллера движения.If they don’t, then check out motion controller troubleshooting.
Облаками и указаниеGazing and pointing
Windows Mixed Reality поддерживает две основные модели взаимодействия. взгляните и зафиксируйте , а затем зафиксируйте:Windows Mixed Reality supports two key models for interaction; gaze and commit and point and commit:
- С помощью взгляда и фиксации пользователи нацелены на объект с помощью взгляда, а затем выбирают объекты с помощью воздушного телевидения, планшета, щелчка или их голоса.
 With gaze and commit, users target an object with their gaze, and then select objects with hand air-taps, a gamepad, a clicker, or their voice.
With gaze and commit, users target an object with their gaze, and then select objects with hand air-taps, a gamepad, a clicker, or their voice. - В случае указания и фиксации пользователь может ориентироваться в целевом объекте, поддерживающем указатель мыши, а затем выбирать объекты с триггером контроллера.With point and commit, a user can aim a pointing-capable motion controller at the target object and then select objects with the controller’s trigger.
Приложения, поддерживающие указание с помощью контроллеров движения, должны также включать возможности взаимодействия на основе взгляда, когда это возможно, чтобы предоставить пользователям возможность выбора используемых устройств ввода.Apps that support pointing with motion controllers should also enable gaze-driven interactions where possible, to give users a choice in what input devices they use.
Управление переобмоткой при наведенииManaging recoil when pointing
При использовании контроллеров движения для указания и фиксации пользователи будут использовать контроллер в качестве целевого объекта и взаимодействовать, изменив его триггер. When using motion controllers to point and commit, your users will use the controller to target and interact by pulling its trigger. Пользователи, получившие триггер вигораусли, могут в итоге надежде, что контроллер будет выше в конце своего запроса триггера, чем планировалось.Users who pull the trigger vigorously may end up aiming the controller higher at the end of their trigger pull than they’d intended.
When using motion controllers to point and commit, your users will use the controller to target and interact by pulling its trigger. Пользователи, получившие триггер вигораусли, могут в итоге надежде, что контроллер будет выше в конце своего запроса триггера, чем планировалось.Users who pull the trigger vigorously may end up aiming the controller higher at the end of their trigger pull than they’d intended.
Чтобы управлять любой такой переброской, которая может возникнуть при изходе триггера пользователями, приложение может привязать его нацеливание, когда значение аналоговой оси триггера превысит 0,0.To manage any such recoil that may occur when users pull the trigger, your app can snap its targeting ray when the trigger’s analog axis value rises above 0.0. Затем можно выполнить действия, используя для лучей несколько кадров, после того как значение триггера достигнет 1,0, пока Последнее нажатие происходит в течение короткого промежутка времени.You can then take action using that targeting ray a few frames later once the trigger value reaches 1. 0, as long as the final press occurs within a short time window. При использовании жеста составного касанияболее высокого уровня Windows управляет этим назначением захвата лучей и временем ожидания.When using the higher-level composite Tap gesture, Windows will manage this targeting ray capture and timeout for you.
0, as long as the final press occurs within a short time window. При использовании жеста составного касанияболее высокого уровня Windows управляет этим назначением захвата лучей и временем ожидания.When using the higher-level composite Tap gesture, Windows will manage this targeting ray capture and timeout for you.
Захват захвата и указание объекта aGrip pose vs. pointing pose
Windows Mixed Reality поддерживает контроллеры движения различными конструктивными факторами, при этом структура каждого контроллера различается в связи между положением пользователя и естественным направлением “вперед”, которое приложения должны использовать для указания при подготовке к просмотру контроллера.Windows Mixed Reality supports motion controllers in different form factors, with each controller’s design differing in its relationship between the user’s hand position and the natural “forward” direction that apps should use for pointing when rendering the controller.
Для лучшего представления этих контроллеров существует два вида элементов, которые можно исследовать для каждого источника взаимодействия. захват и указатель a.To better represent these controllers, there are two kinds of poses you can investigate for each interaction source; the grip pose and the pointer pose.
захват и указатель a.To better represent these controllers, there are two kinds of poses you can investigate for each interaction source; the grip pose and the pointer pose.
ПодзахватGrip pose
Подсистема захвата представляет собой расположение кармана от руки, обнаруженного HoloLens, или карманного компьютера, удерживающий контроллер движения.The grip pose represents the location of either the palm of a hand detected by a HoloLens, or the palm holding a motion controller.
На современных головных телефонах подзахваты лучше использовать для отрисовки руки пользователя или объекта, хранящегося в руки пользователя, например технологий или обоймы.On immersive headsets, the grip pose is best used to render the user’s hand or an object held in the user’s hand, such as a sword or gun. Элемент захвата также используется при визуализации контроллера движения, так как модель подготовки к просмотру , предоставляемая Windows для контроллера движения, использует захват в качестве источника и центра вращения. The grip pose is also used when visualizing a motion controller, as the renderable model provided by Windows for a motion controller uses the grip pose as its origin and center of rotation.
The grip pose is also used when visualizing a motion controller, as the renderable model provided by Windows for a motion controller uses the grip pose as its origin and center of rotation.
Захват захвата определяется в частности следующим образом:The grip pose is defined specifically as follows:
- Позиция захвата: Карманный центроид при удержании контроллера естественным образом настраивается влево или вправо для центрирования места внутри захвата.The grip position: The palm centroid when holding the controller naturally, adjusted left or right to center the position within the grip. В контроллере движения Windows Mixed Reality эта отправка обычно соответствует кнопке “расположить”.On the Windows Mixed Reality motion controller, this position generally aligns with the Grasp button.
- Правая ось ориентации захвата: когда вы полностью открываете руку для формирования плоской задачи с пятью пальцами, луч, обычный для вашего кармана (вперед от левого кармана, назад от правого Palm)The grip orientation’s Right axis: When you completely open your hand to form a flat five-finger pose, the ray that is normal to your palm (forward from left palm, backward from right palm)
- Прямая ось ориентации захвата: когда вы частично закрываете руку (как при удержании контроллера), луч, который указывает на “Forward” через лампу, сформированную небегункными пальцами.
 The grip orientation’s Forward axis: When you close your hand partially (as if holding the controller), the ray that points “forward” through the tube formed by your non-thumb fingers.
The grip orientation’s Forward axis: When you close your hand partially (as if holding the controller), the ray that points “forward” through the tube formed by your non-thumb fingers. - Ось Up (вверх) для ориентации захвата: ось Up, подразумеваемая правым и прямым определением.The grip orientation’s Up axis: The Up axis implied by the Right and Forward definitions.
Указатель aPointer pose
Указатель a представляет кончик контроллера, указывающий на пересылку.The pointer pose represents the tip of the controller pointing forward.
Предоставляемый системой указатель, который лучше использовать для райкаст при отрисовке самой модели контроллера.The system-provided pointer pose is best used to raycast when you’re rendering the controller model itself. При визуализации какого-либо другого виртуального объекта вместо контроллера, например виртуального, следует указывать на луч, который наиболее естественным для этого виртуального объекта, например луч, который перемещается на объект модели обойм, определяемой приложением. If you’re rendering some other virtual object in place of the controller, such as a virtual gun, you should point with a ray that is most natural for that virtual object, such as a ray that travels along the barrel of the app-defined gun model. Так как пользователи могут видеть виртуальный объект, а не физический контроллер, указание виртуального объекта, скорее всего, будет более естественным для тех, кто использует ваше приложение.Because users can see the virtual object and not the physical controller, pointing with the virtual object will likely be more natural for those using your app.
If you’re rendering some other virtual object in place of the controller, such as a virtual gun, you should point with a ray that is most natural for that virtual object, such as a ray that travels along the barrel of the app-defined gun model. Так как пользователи могут видеть виртуальный объект, а не физический контроллер, указание виртуального объекта, скорее всего, будет более естественным для тех, кто использует ваше приложение.Because users can see the virtual object and not the physical controller, pointing with the virtual object will likely be more natural for those using your app.
Состояние отслеживания контроллераController tracking state
Как и гарнитуры, для контроллера движения Windows Mixed Reality не требуется настраивать внешние датчики отслеживания.Like the headsets, the Windows Mixed Reality motion controller requires no setup of external tracking sensors. Вместо этого контроллеры прописываются датчиками в самой гарнитуре.Instead, the controllers are tracked by sensors in the headset itself.
Если пользователь перемещает контроллеры из поля зрения гарнитуры, в большинстве случаев Windows будет по прежнему вычислять позиции контроллера и предоставлять их приложению.If the user moves the controllers out of the headset’s field of view, in most cases Windows will continue to infer controller positions and provide them to the app. Когда контроллер потеряет Визуальное отслеживание на достаточно длинном уровне, позиции контроллера будут отбрасываться на позиции приблизительной точности.When the controller has lost visual tracking for long enough, the controller’s positions will drop to approximate-accuracy positions.
На этом этапе система будет блокировать контроллер для пользователя, отслеживая положение пользователя по мере его перемещения, сохраняя при этом ориентацию на уровне true, используя внутренние датчики ориентации.At this point, the system will body-lock the controller to the user, tracking the user’s position as they move around, while still exposing the controller’s true orientation using its internal orientation sensors. Многие приложения, использующие контроллеры для указания и активации элементов пользовательского интерфейса, могут нормально работать при приближенной точности, не закрывая пользователю.Many apps that use controllers to point at and activate UI elements can operate normally while in approximate accuracy without the user noticing.
Многие приложения, использующие контроллеры для указания и активации элементов пользовательского интерфейса, могут нормально работать при приближенной точности, не закрывая пользователю.Many apps that use controllers to point at and activate UI elements can operate normally while in approximate accuracy without the user noticing.
Явное объяснение состояния отслеживанияReasoning about tracking state explicitly
Приложения, которые хотят обрабатывать позиции по-разному в зависимости от состояния отслеживания, могут дополнительно проанализировать свойства в состоянии контроллера, такие как Саурцелоссриск и Поситионаккураци:Apps that wish to treat positions differently based on tracking state may go further and inspect properties on the controller’s state, such as SourceLossRisk and PositionAccuracy:
| Состояние отслеживанияTracking state | саурцелоссрискSourceLossRisk | поситионаккурациPositionAccuracy | трижетпоситионTryGetPosition |
|---|---|---|---|
| Высокая точность High accuracy | < 1,0< 1. 0 0 | ВысокийHigh | Даtrue |
| Высокая точность (при потере риска) High accuracy (at risk of losing) | = = 1,0== 1.0 | ВысокийHigh | Даtrue |
| Приблизительная точность Approximate accuracy | = = 1,0== 1.0 | ПриблизительнаApproximate | Даtrue |
| Без расположения No position | = = 1,0== 1.0 | ПриблизительнаApproximate | falsefalse |
Эти состояния отслеживания контроллера движения определяются следующим образом.These motion controller tracking states are defined as follows:
- Высокая точность: Хотя контроллер движения находится внутри поля зрения гарнитуры, он обычно предоставляет высокую точность на основе визуального отслеживания.High accuracy: While the motion controller is within the headset’s field of view, it will generally provide high-accuracy positions, based on visual tracking.
 Перемещаемый контроллер, проходящий через некоторое время, покидает поле зрения или мгновенно закрывается от датчиков гарнитуры (например, с другой стороны пользователя) продолжит возвращать высокую точность в течение короткого времени, исходя из инерции отслеживания самого контроллера.A moving controller that momentarily leaves the field of view or is momentarily obscured from the headset sensors (for example, by the user’s other hand) will continue to return high-accuracy poses for a short time, based on inertial tracking of the controller itself.
Перемещаемый контроллер, проходящий через некоторое время, покидает поле зрения или мгновенно закрывается от датчиков гарнитуры (например, с другой стороны пользователя) продолжит возвращать высокую точность в течение короткого времени, исходя из инерции отслеживания самого контроллера.A moving controller that momentarily leaves the field of view or is momentarily obscured from the headset sensors (for example, by the user’s other hand) will continue to return high-accuracy poses for a short time, based on inertial tracking of the controller itself. - Высокая точность (при потере риска): Когда пользователь перемещает контроллер движения за пределы поля “гарнитура”, головной телефон вскоре не сможет визуально отвести мониторинг позиции контроллера.High accuracy (at risk of losing): When the user moves the motion controller past the edge of the headset’s field of view, the headset will soon be unable to visually track the controller’s position. Приложение знает, когда контроллер достиг этой фов границы, просматривая саурцелоссриск REACH 1,0.
 The app knows when the controller has reached this FOV boundary by seeing the SourceLossRisk reach 1.0. На этом этапе приложение может приостановить жесты контроллера, для которых требуется постоянный поток с высоким качеством.At that point, the app may choose to pause controller gestures that require a steady stream of high quality poses.
The app knows when the controller has reached this FOV boundary by seeing the SourceLossRisk reach 1.0. На этом этапе приложение может приостановить жесты контроллера, для которых требуется постоянный поток с высоким качеством.At that point, the app may choose to pause controller gestures that require a steady stream of high quality poses. - Приблизительная точность: Когда контроллер потеряет Визуальное отслеживание на достаточно длинном уровне, позиции контроллера будут отбрасываться на позиции приблизительной точности.Approximate accuracy: When the controller has lost visual tracking for long enough, the controller’s positions will drop to approximate-accuracy positions. На этом этапе система будет блокировать контроллер для пользователя, отслеживая положение пользователя по мере его перемещения, сохраняя при этом ориентацию на уровне true, используя внутренние датчики ориентации.At this point, the system will body-lock the controller to the user, tracking the user’s position as they move around, while still exposing the controller’s true orientation using its internal orientation sensors.
 Многие приложения, использующие контроллеры для указания и активации элементов пользовательского интерфейса, могут нормально работать в режиме обычной точности, не закрывая пользователю.Many apps that use controllers to point at and activate UI elements can operate as normal while in approximate accuracy without the user noticing. Приложения с более высокими требованиями к входным данным могут отказаться от высокой точности для приблизительной точности, проверив свойство поситионаккураци , например, чтобы предоставить пользователю более масштабная хитбокс на экранных целевых объектах в течение этого времени.Apps with heavier input requirements may choose to sense this drop from High accuracy to Approximate accuracy by inspecting the PositionAccuracy property, for example to give the user a more generous hitbox on off-screen targets during this time.
Многие приложения, использующие контроллеры для указания и активации элементов пользовательского интерфейса, могут нормально работать в режиме обычной точности, не закрывая пользователю.Many apps that use controllers to point at and activate UI elements can operate as normal while in approximate accuracy without the user noticing. Приложения с более высокими требованиями к входным данным могут отказаться от высокой точности для приблизительной точности, проверив свойство поситионаккураци , например, чтобы предоставить пользователю более масштабная хитбокс на экранных целевых объектах в течение этого времени.Apps with heavier input requirements may choose to sense this drop from High accuracy to Approximate accuracy by inspecting the PositionAccuracy property, for example to give the user a more generous hitbox on off-screen targets during this time. - Без расположения: Несмотря на то, что контроллер может нормально обрабатываться в течение длительного времени, иногда система знает, что даже в данный момент не имеет смысла в том случае, если на самом деле есть неосмысленная Блокировка текста.
 No position: While the controller can operate at approximate accuracy for a long time, sometimes the system knows that even a body-locked position isn’t meaningful at the moment. Например, контроллер, который был включен, может никогда не наблюдаться в визуальном состоянии, или же пользователь может установить контроллер, который затем заберет другой.For example, a controller that was turned on may have never been observed visually, or a user may put down a controller that’s then picked up by someone else. В это время система не предоставит какое бы то ни было приложение, а трижетпоситион вернет значение false.At those times, the system won’t provide any position to the app, and TryGetPosition will return false.
No position: While the controller can operate at approximate accuracy for a long time, sometimes the system knows that even a body-locked position isn’t meaningful at the moment. Например, контроллер, который был включен, может никогда не наблюдаться в визуальном состоянии, или же пользователь может установить контроллер, который затем заберет другой.For example, a controller that was turned on may have never been observed visually, or a user may put down a controller that’s then picked up by someone else. В это время система не предоставит какое бы то ни было приложение, а трижетпоситион вернет значение false.At those times, the system won’t provide any position to the app, and TryGetPosition will return false.
Взаимодействия: низкоуровневый пространственный вводInteractions: Low-level spatial input
Основными взаимодействиями между контроллерами движения и перемещения являются Выбор, меню , расходу, сенсорная панель, аналоговый стик и Домашняя страница. The core interactions across hands and motion controllers are Select, Menu, Grasp, Touchpad, Thumbstick, and Home.
The core interactions across hands and motion controllers are Select, Menu, Grasp, Touchpad, Thumbstick, and Home.
- SELECT является основным взаимодействием для активации голограммы, состоящей из пресс-релиза, за которой следует выпуск.Select is the primary interaction to activate a hologram, consisting of a press followed by a release. Для контроллеров движения необходимо выполнить выбор с помощью триггера контроллера.For motion controllers, you perform a Select press using the controller’s trigger. Другие способы выполнения SELECT — Голосовая команда “Select”.Other ways to perform a Select are by speaking the voice command “Select”. Одно и то же взаимодействие SELECT можно использовать в любом приложении.The same select interaction can be used within any app. Представьте себе SELECT как эквивалент щелчка мыши; универсальное действие, которое вы узнаете один раз и затем распространяется на все приложения.
 Think of Select as the equivalent of a mouse click; a universal action that you learn once and then apply across all your apps.
Think of Select as the equivalent of a mouse click; a universal action that you learn once and then apply across all your apps. - Меню — это дополнительное взаимодействие над объектом, используемое для получения контекстного меню или выполнения другого вторичного действия.Menu is the secondary interaction for acting on an object, used to pull up a context menu or take some other secondary action. При использовании контроллеров движения можно выполнить действие меню с помощью кнопки меню контроллера.With motion controllers, you can take a menu action using the controller’s menu button. (т. е. кнопка с значком “Menu” («гамбургер») на нем)(that is, the button with the hamburger “menu” icon on it)
- С учетом того, как пользователи могут напрямую выполнять действия с объектами с их стороны для управления ими.Grasp is how users can directly take action on objects at their hand to manipulate them.
 С помощью контроллеров Motion вы можете выполнить меры, кулак тесно.With motion controllers, you can do a grasp action by squeezing your fist tightly. Контроллер движения может обнаружить проявление с помощью кнопки захвата, триггера Palm или другого датчика.A motion controller may detect a Grasp with a grab button, palm trigger, or other sensor.
С помощью контроллеров Motion вы можете выполнить меры, кулак тесно.With motion controllers, you can do a grasp action by squeezing your fist tightly. Контроллер движения может обнаружить проявление с помощью кнопки захвата, триггера Palm или другого датчика.A motion controller may detect a Grasp with a grab button, palm trigger, or other sensor. - Сенсорная панель позволяет пользователю настроить действие в двух измерениях на поверхности сенсорного контроллера движения, зафиксировать действие, нажав на сенсорную панель.Touchpad allows the user to adjust an action in two dimensions along the surface of a motion controller’s touchpad, committing the action by clicking down on the touchpad. Сенсорные панели обеспечивают состояние нажатия, затронутое состояние и нормализованные координаты координат.Touchpads provide a pressed state, touched state, and normalized XY coordinates. Значения X и Y находятся в диапазоне от-1 до 1 по диапазону круглой сенсорной панели, где по центру (0, 0).
X and Y range from -1 to 1 across the range of the circular touchpad, with a center at (0, 0). Для X,-1 — слева, а 1 — справа.For X, -1 is on the left and 1 is on the right. Для Y,-1 — снизу, а 1 — сверху.For Y, -1 is on the bottom and 1 is on the top.
- Аналоговый стик позволяет настраивать действие в двух измерениях путем перемещения аналогового стика контроллера движения в пределах своего кругового диапазона и фиксации действия, щелкая на аналоговый стик.Thumbstick allows the user to adjust an action in two dimensions by moving a motion controller’s thumbstick within its circular range, committing the action by clicking down on the thumbstick. Сумбстиккс также обеспечивают нажатое состояние и нормализованные координаты координат.Thumbsticks also provide a pressed state and normalized XY coordinates. Значения X и Y находятся в диапазоне от-1 до 1 по диапазону круглой сенсорной панели, где по центру (0, 0).X and Y range from -1 to 1 across the range of the circular touchpad, with a center at (0, 0).
 Для X,-1 — слева, а 1 — справа.For X, -1 is on the left and 1 is on the right. Для Y,-1 — снизу, а 1 — сверху.For Y, -1 is on the bottom and 1 is on the top.
Для X,-1 — слева, а 1 — справа.For X, -1 is on the left and 1 is on the right. Для Y,-1 — снизу, а 1 — сверху.For Y, -1 is on the bottom and 1 is on the top. - Главная — это специальное системное действие, используемое для возврата в меню “Пуск”.Home is a special system action that is used to go back to the Start Menu. Аналогично нажатию клавиши Windows на клавиатуре или кнопки Xbox на контроллере Xbox.It’s similar to pressing the Windows key on a keyboard or the Xbox button on an Xbox controller. Вы можете зайти домой, нажав кнопку Windows на контроллере движения.You can go Home by pressing the Windows button on a motion controller. Обратите внимание, что вы всегда можете вернуться к началу, выполнив команду “Привет Кортане, Go домой”.Note, you can always return to Start by saying “Hey Cortana, Go Home”. Приложения не могут реагировать на действия, относящиеся к домашним, так как они обрабатываются системой.Apps can’t react specifically to Home actions, as these are handled by the system.

Составные жесты: высокоуровневый пространственный вводComposite gestures: High-level spatial input
Как жесты , так и контроллеры движения можно отслеживать с течением времени для обнаружения общего набора составных жестов высокого уровня.Both hand gestures and motion controllers can be tracked over time to detect a common set of high-level composite gestures. Это позволяет приложению обнаруживать жесты касания, удержания, манипуляции и навигации , если пользователи в итоге используют руки или контроллеры.This enables your app to detect high-level tap, hold, manipulation and navigation gestures, whether users end up using hands or controllers.
Подготовка модели контроллера движения к просмотруRendering the motion controller model
модели трехмерного контроллера Windows делает доступными для приложений модель для подготовки к просмотру каждого контроллера движения, который в настоящее время активен в системе. 3D controller models Windows makes available to apps a renderable model of each motion controller currently active in the system. Если приложение динамически загружает и вырабатывает эти системные модели контроллеров во время выполнения, вы можете обеспечить совместимость приложения с любыми будущими моделями контроллеров.By having your app dynamically load and articulate these system-provided controller models at runtime, you can ensure your app is forward-compatible to any future controller designs.
3D controller models Windows makes available to apps a renderable model of each motion controller currently active in the system. Если приложение динамически загружает и вырабатывает эти системные модели контроллеров во время выполнения, вы можете обеспечить совместимость приложения с любыми будущими моделями контроллеров.By having your app dynamically load and articulate these system-provided controller models at runtime, you can ensure your app is forward-compatible to any future controller designs.
Рекомендуется визуализировать все готовые модели на захвате контроллера, так как источник модели соответствует этой точке в физическом мире.We recommend rendering all renderable models at the grip pose of the controller, as the origin of the model is aligned with this point in the physical world. При подготовке к просмотру моделей контроллеров вы можете райкаст в сцену из указателя a, который представляет луч, на котором пользователи естественным образом задаются, учитывая физическую структуру контроллера. If you’re rendering controller models, you may then wish to raycast into your scene from the pointer pose, which represents the ray along which users will naturally expect to point, given that controller’s physical design.
If you’re rendering controller models, you may then wish to raycast into your scene from the pointer pose, which represents the ray along which users will naturally expect to point, given that controller’s physical design.
Дополнительные сведения о динамической загрузке моделей контроллеров в Unity см. в разделе Подготовка модели контроллера движения в Unity.For more information about how to load controller models dynamically in Unity, see the Rendering the motion controller model in Unity section.
график линий 2D-контроллера Несмотря на то, что мы рекомендуем присоединить в себя советы и команды контроллера в приложении к самим моделям контроллера, некоторые разработчики могут использовать двумерные штриховые представления контроллеров движения в плоском «учебнике» или «как» пользовательского интерфейса.2D controller line art While we recommend attaching in-app controller tips and commands to the in-app controller models themselves, some developers may want to use 2D line art representations of the motion controllers in flat “tutorial” or “how-to” UI. Для этих разработчиков мы сделали так. png-контроллер движения. графические файлы доступны как в черном, так и белом рисунке (щелкните правой кнопкой мыши, чтобы сохранить).For those developers, we’ve made .png motion controller line art files available in both black and white below (right-click to save).
Для этих разработчиков мы сделали так. png-контроллер движения. графические файлы доступны как в черном, так и белом рисунке (щелкните правой кнопкой мыши, чтобы сохранить).For those developers, we’ve made .png motion controller line art files available in both black and white below (right-click to save).
Контроллеры движения с полным разрешением. графика в “‘” белый “” “Full-resolution motion controllers line art in ”’white”’
Контроллеры движения с высоким разрешением. графика в “‘ ‘ Черная ‘ ‘ ‘Full-resolution motion controllers line art in ”’black”’
ВОПРОСЫ И ОТВЕТЫFAQ
Можно ли связать контроллеры Motion с несколькими компьютерами?Can I pair motion controllers to multiple PCs?
Контроллеры движения поддерживают связывание с одним компьютером.Motion controllers support pairing with a single PC. Следуйте инструкциям по настройке контроллера движения , чтобы связать контроллеры.Follow instructions on motion controller setup to pair your controllers.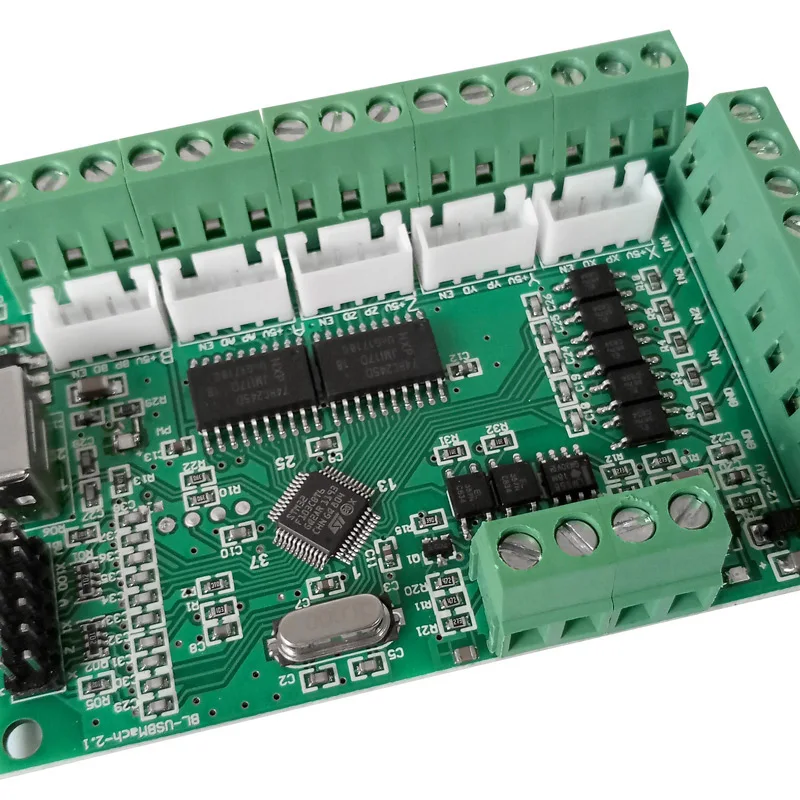
Разделы справки обновить встроенное по контроллера движения?How do I update motion controller firmware?
Встроенное по контроллера движения является частью драйвера гарнитуры и будет автоматически обновлено при подключении при необходимости.Motion controller firmware is part of the headset driver and will be updated automatically on connection, if necessary. Обновление встроенного по обычно занимает 1-2 минут в зависимости от радиосигнала Bluetooth и качества связи.Firmware updates typically take 1-2 minutes depending on Bluetooth radio and link quality. В редких случаях обновление встроенного по контроллера может занять до 10 минут, что может указывать на плохое подключение Bluetooth или радиопомехи.In rare cases, controller firmware updates may take up to 10 minutes, which can indicate poor Bluetooth connectivity or radio interference. Сведения об устранении проблем с подключением см. в статье рекомендации по Bluetooth в статье о энтузиастах .See Bluetooth best practices in the Enthusiast Guide to troubleshoot connectivity issues. После обновления встроенного по контроллеры перезапускаются и подключаются к главному компьютеру (вы можете заметить, что индикаторы будут освещены для отслеживания).After a firmware update, controllers will reboot and reconnect to the host PC (you may notice the LEDs go bright for tracking). Если обновление встроенного по прервано (например, при потере питания контроллеров), будет предпринята попытка повторного выполнения в следующий раз, когда контроллеры будут включены.If a firmware update is interrupted (for example, the controllers lose power), it will be attempted again the next time the controllers are powered on.
После обновления встроенного по контроллеры перезапускаются и подключаются к главному компьютеру (вы можете заметить, что индикаторы будут освещены для отслеживания).After a firmware update, controllers will reboot and reconnect to the host PC (you may notice the LEDs go bright for tracking). Если обновление встроенного по прервано (например, при потере питания контроллеров), будет предпринята попытка повторного выполнения в следующий раз, когда контроллеры будут включены.If a firmware update is interrupted (for example, the controllers lose power), it will be attempted again the next time the controllers are powered on.
Как можно проверить уровень заряда батареи?How I can check battery level?
На домашней странице Windows Mixed Realityможно включить контроллер, чтобы увидеть уровень его аккумулятора на противоположной стороне виртуальной модели.In the Windows Mixed Reality home, you can turn your controller over to see its battery level on the reverse side of the virtual model. Отсутствует индикатор физического аккумулятора.There’s no physical battery level indicator.
Отсутствует индикатор физического аккумулятора.There’s no physical battery level indicator.
Можно ли использовать эти контроллеры без головного телефона?Can you use these controllers without a headset? Только для джойстика, триггера или других входных данных?Just for the joystick/trigger/etc input?
Не для универсальных приложений Windows.Not for Universal Windows Applications.
Устранение неполадокTroubleshooting
См. раздел Устранение неполадок контроллера движения в разделе Руководство по энтузиасту.See motion controller troubleshooting in the Enthusiast Guide.
Архивация отзывов и ошибок контроллера движенияFiling motion controller feedback/bugs
Отправьте нам отзыв в центре обратной связи, используя категорию “смешанная реальность — > вход”.Give us feedback in Feedback Hub, using the “Mixed Reality -> Input” category.
См. также разделSee also
Новые контроллеры движения – Delta Electronics
[ 02.06.2020 ]Новые контроллеры движения
Новые контроллеры Delta Electronics для задач управления движением: серия DVP-15MC с поддержкой CAN Motion (DSP402) и серия DVP-50MC c поддержкой EtherCAT Motion.
Обе новые серии имеют модели с управлением до 6 или 24 реальными осями с поддержкой виртуальных приводов. Время синхронизации составляет 2 мс для 4-осей по сети CANOpen и 1 мс для 24 осей по сети EtherCAT.
Новые контроллеры отличает простота использования и программирования благодаря поддержке библиотек управления движением PLCopen MC и встроенным функциям движения Jerk, BufferMode, координатного перемещения и т.п.
Контроллеры серии DVP-15MC и DVP-50MC уже имеют встроенные быстродействующие входы/выходы (16DI/8DO) с возможностью расширения с помощью недорогих модулей от серии DVP-S/SL, для управления различными ведомыми устройствами есть встроенные порты Ethernet (Modbus TCP Server/Client, Ethernet/IP Adapter, Socket TCP/UDP), CANopen DS301, RS485 (Modbus).
Функции управления движением:
- Поддержка библиотек управления движением PLCopen MC
- Библиотека готовых прикладных инструкций Delta Library
- Поддержка буферного режима (безостановочный переход с одного участка траектории на другой)
- Наличие параметра Jerk (максимально плавные разгон и торможение)
- Поддержка энкодеров в качестве мастер оси (контроллеры имеют 2 встроенных интерфейса энкодера + 1 интерфейс абсолютного энкодера SSI)
- Поддержка G-кодов: до 8 осей, линейная / дуговая / спиральная интерполяция
- Одноосевое движение: режимы скорости, позиции, момента, возврата в ноль
- Линейная интерполяция до 8 осей
- Круговая интерполяция до 3 осей
- Электронный кулачок E-CAM: 64 кривых до 2048 точек каждая
- Поддержка E-GEAR (зависимое движение одной оси относительно другой)
- Встроенная процедура барабанной резки
- Захват текущей позиции по прерыванию
Контроллер движения ЛИР-983 в Москве
Контроллер движения ЛИР-983 входит в Систему Позиционного Программного Управления приводами (СППУ) и предназначен для управления приводами подач, скорость движения которых определяется напряжением, поданным на аналоговый вход.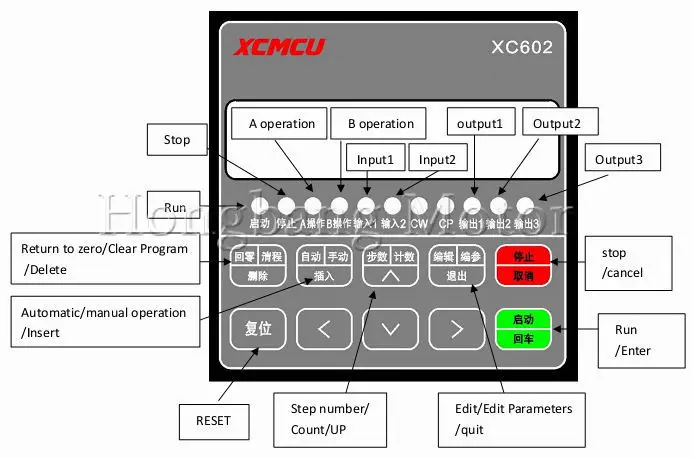 Контроллер принимает команды на перемещение от пульта оператора и отрабатывает их по своему алгоритму, управляя скоростью привода. ЛИР-983 может контролировать две оси, управление которыми осуществляется поочередно. Позиционирование в заданную координату происходит посредством четырех зон торможения. Ширина зон программируется с пульта оператора при настройке системы.
Контроллер принимает команды на перемещение от пульта оператора и отрабатывает их по своему алгоритму, управляя скоростью привода. ЛИР-983 может контролировать две оси, управление которыми осуществляется поочередно. Позиционирование в заданную координату происходит посредством четырех зон торможения. Ширина зон программируется с пульта оператора при настройке системы.
ЛИР-983 имеет 2 аналоговых выхода, 4 дискретных входа и 4 дискретных выхода. Их удобно использовать для задач управления приводом. Для сигнализации о текущем состоянии дискретного входа/выхода, напротив каждой клеммы, установлены светодиодные индикаторы – зелёного цвета для входов и красного для выходов. Входы и выходы гальванически изолированы от электрических цепей контроллера. Оптореле, установленные на выходах, могут управлять пускателями непосредственно, в то время как оптроны требуют установки промежуточных реле. Количество дискретных входов/выходов может быть увеличено за счет подключения контроллеров ЛИР-987.
ЛИР-983 Изготавливается в малогабаритном пластмассовом корпусе с креплением, предназначенным для установки модуля на DIN-рельс. Для подключения внешних проводов используются разъемные колодки с винтовыми зажимами. Преобразователи перемещений подключаются к двум разъемам D-SUB DB9F (розетка).
Код заказа контроллера движения ЛИР-983.
Для одновременного управления двумя осями необходимо чтобы эти оси были подключены к одному контроллеру движения и в коде заказа пульта оператора ЛИР-581 присутствовала позиция 2D.
Примеры:
ЛИР-983-ДИ – контроллер управления движением с двумя входами для подключения инкрементных датчиков, 4 дискретных входа и 4 дискретных выхода с твердотельными реле для управления приводами с аналоговым заданием скорости.
ЛИР-983-ДА – контроллер управления движением с двумя входами для подключения абсолютных датчиков, 4 дискретных входа и 4 дискретных выхода с твердотельными реле для управления приводами с аналоговым заданием скорости.
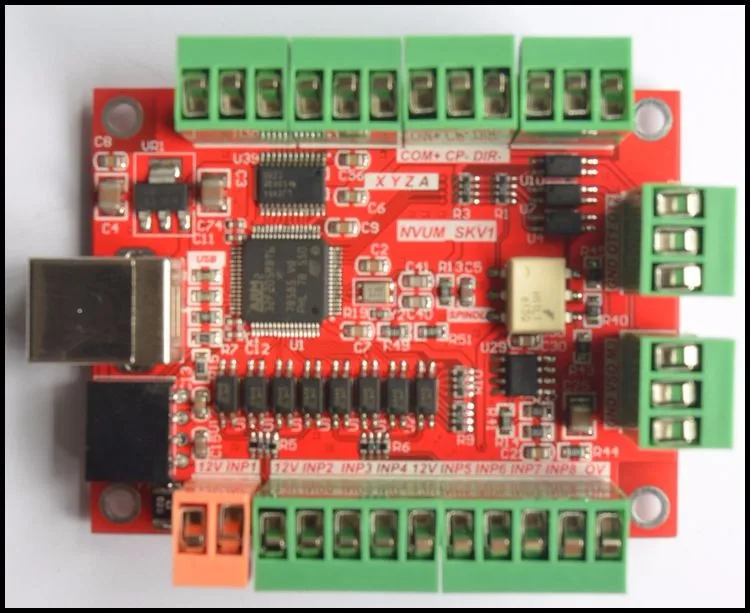
| Количество осей | 4-осевой |
|---|---|
| Тип | Бескорпусной (на плате) |
| Главные особенности | S-образное ускорение/замедление, постоянная линейная скорость, синхронная работа |
| Контакт вход/выход | Оси X, Y, Z, U: 15/8 (стандарт: 0/4) |
| Интерполяции | 2/3-осевая линейная интерполяция, дуговая интерполяция,2/3-осевая интерполяция на основе битового шаблона, постоянная интерполяция |
| Режим работы | Программируется пользователем |
| Установка в заданное положение | АБСОЛЮТНЫЙ, ИНКРЕМЕНТАЛЬНЫЙ |
| Скорость подачи импульсов | От 1pps до 4 Mpps |
| Тип соединения | Слот PCI |
| Протокол соединения | Шина PCI |
| Использованная библиотека | Язык програмирования С (библиотеки DLL в комплекте), LabView |
| Напряжение питания | 24V DC |
| Сертификаты | @(CE) @(KC) |
| Диапазон 2/3-осевой линейной интерполяции | От -2147483648 до 2147483647 для каждой оси |
| 2/3-х осевая скорость линейной интерполяции | От 1pps до 4 Mpps |
| Точность позиции 2/3-х линейной интерполяции | Макс. ±0,5 младшего бита (в пределах всего интервала интерполяции) ±0,5 младшего бита (в пределах всего интервала интерполяции) |
| Диапазон круговой интерполяции | От -2147483648 до 2147483647 для каждой оси |
| Скорость круговой интерполяции | От 1pps до 4 Mpps |
| Точность позиции круговой интерполяции | Макс. ±1 младший бит (в пределах всего интервала интерполяции) |
| Температура окружающей среды | 0…+45℃, при хранении: -10…+55℃ |
| Влажность окружающей среды | Относительная влажность 35-85%, при хранении: 35-85% |
| Масса | Прибл. 654,4 г (прибл. 100,4 г) |
Контроллеры вращения, синхронности движения и проскальзывания
Устройства контроля направления вращения, аварийного останова, числа оборотов, перекоса в движении, волновых провалов, проскальзываний, систем позиционирования с 2-х кратной надежностью (2-мя независимыми каналами слежения) с входами для инкрементальных энкодеров, синус-косинусных энкодеров и датчиков…
Контроллеры направления вращения, количества оборотов, синхронности движения и проскальзывания
DZ210: Устройство наблюдения за направлением вращения и аварийного останова
- Простой прибор контроля направления перемещения влево/вправо и аварийной остановки машины
- Универсальные импульсные входы для всех распространенных инкрементных энкодеров и сенсоров
- Высокая максимальная частота (500 кГц) и очень малое время реакции (<1 msec.
 при f >1 kHz)
при f >1 kHz) - 2 релейных выхода (свободные от потенциала контакты на переключение) и 2 быстро реагирующих полупроводниковых выхода
Документация:
Информация на сайте производителя: на английском >> на немецком >> на русском (перевод от Google) >>
Инструкция по эксплуатации: на английском >> на немецком >>
Подробные технические данные: на английском >> на немецком >>
DZ260—DZ269: Универсальные устройства контроля числа оборотов, направления вращения и аварийной остановки для инкрементальных энкодеров и датчиков
DZ260: 3 релейных выхода, аналоговый выход, интерфейс RS232
DZ261: 3 транзисторных выхода,аналоговый выход, интерфейс RS232
DZ267: 3 релейных выхода, интерфейс RS232
DZ269: 3 транзисторных выхода, интерфейс RS232
- Приборы с быстрой реакцией и большим количеством программируемых функций для контроля: числа оборотов (с программируемым ожиданием полного разгона), аварийного останова и направления вращения
- Импульсные входы для подключения одноканальных сигналов (только дорожка A), двухканальных сигналов (A, B, 2×90°) или TTL- и RS422-сигналов в дифференциальном формате A, /A, B, /B
- Широкий рабочий диапазон: 0,1 Гц до 1 МГц
- Установка с помощью кнопок на передней панели и меню-диалога на LCD-дисплее
- Последовательный интерфейс RS232
- Питание 24 VDC, Выход +5V для питания TTL-датчиков
- Исполнение для крепления на DIN-рейку
Документация:
Информация на сайте производителя: на английском >> на немецком >> на русском (перевод от Google) >>
Инструкция по эксплуатации: на английском >> на немецком >>
Подробные технические данные: на английском >> на немецком >>
ZD640: Устройство контроля перекоса движения, волновых провалов, проскальзываний и пр.

- Устройство для подключения двух независимых энкодеров, каждый A/B (2×90°) или A, /A, B, /B (RS422 или TTL)
- Прибор формирует разницу из сигналов подключенных энкодеров и сравнивает их, включая знак, с 4-мя предустанавливаемыми порогами срабатывания.
- 4 программируемых релейных выхода переключаются в зависимости от вычисленной разницы позиционного значения
- Включаемая управляемая по времени функция сброса позволяет контролировать проскальзывание с учетом допустимых дефинируемых отклонений.
MS640: Motion-Monitor — устройство контроля систем перемещения и позиционирования с 2-х кратной надежностью (2-мя независимыми каналами слежения)
- Логический и правдивый контроль движения моторов и связанных с ними через привод движущиеся части машины
- 2 входа для двух независимых энкодеров, 4 входа управления, 6 входов для логических связей/функций
- 4 быстрых полупроводниковых выхода и 4 релейных выхода
- Регистрирует состояние движущихся элементов непосредственно на валу привода и на периферийных элементах машины, сравнивает эти состояния с запрограммированными пользователем значениями и подает сигнал аварии на выходы устройства если перемещения/положения валов между собой не соответствуют логике или заданные граничные значения вышли за пределы допустимых
- Постоянная регистрация текущего значения на обоих энкодерах (число оборотов, направление вращения, аварийный останов, текущее положение и отклонение)
- Простое удобное программирование всех желаемых функций переключения контроля с помощью компьютера.

Документация:
Информация на сайте производителя: на английском >> на немецком >> на русском (перевод от Google) >>
Инструкция по эксплуатации: на английском >> на немецком >>
Подробные технические данные: на английском >> на немецком >>
Amazon.com: Контроллеры движения PlayStation Move
Платформа : PlayStation 4
| Прейскурантная цена: | 99 долларов. 99 Подробности 99 Подробности |
| Цена: | 90,99 долл. США + Без залога за импорт и $ 21,59 за доставку в Российскую Федерацию Подробности |
| Вы экономите: | 9,00 долларов США (9%) |
В наличии 25 апреля 2021 г.
Закажите сейчас.
Поставляется и продается на Amazon. com.
com.
- Усовершенствованная технология обнаружения движения и светового отслеживания
- Легкодоступные триггерные и лицевые кнопки
- Иммерсивная вибрационная обратная связь
- Аккумуляторы обеспечивают долгие часы игры
Контроллеры движения
Семейство контроллеров движения Delta RMC обеспечивает лучшее в своем классе промышленное гидравлическое, пневматическое и электрическое управление с обратной связью по 50 осям.
Семейство контроллеров движения RMC состоит из RMC75, RMC150, RMC200 и более старого RMC100. Эти контроллеры позволяют использовать преимущества высокопроизводительного и простого в использовании управления движением для широкого спектра промышленных приложений.
С контроллером движения RMC плавный переход между управлением положением, скоростью и давлением / силой. Программируйте, настраивайте и диагностируйте свой RMC с помощью мощного программного обеспечения RMCTools от Delta.
RMC75, RMC150 и RMC200 имеют почти все одинаковые функции управления и конфигурируются и программируются одинаково с помощью программного обеспечения Delta RMCTools.Если вы знаете, как установить и настроить один из этих контроллеров, вы можете настроить и другие так же легко!
Доступен ряд вариантов обратной связи для управления широким спектром гидравлических, электрических и пневматических приложений, регулирующих положение и положение – давление или положение – усилие.
Управляйте от 1 до 50 осей с помощью одного пакета программного обеспечения, высокопроизводительных и простых в использовании инструментов RMCTools от Delta.
| RMC75: 1-2 оси управления Высокая производительность для небольших приложений Серия контроллеров движения RMC75 предлагает на выбор три ЦП RMC75 для одно- и двухосных систем. | Сравнить контроллеры | |
| RMC150: 2-8 осей управления Широкие возможности настройки для широкого спектра приложений среднего размера Контроллер движения RMC150 поддерживает системы от 2 до 8 осей. Встроенный порт 10/100 Ethernet обеспечивает подключение ко многим ПЛК и HMI. | ||
| RMC200: до 50 осей управления Самый новый и самый мощный контроллер Delta для больших приложений Семейство контроллеров движения RMC200 поддерживает системы с числом осей до 50. |
 Встроенные порты Ethernet 10/100 обеспечивают подключение ко многим ПЛК и HMI. RMC200 предлагается в облегченной и стандартной конфигурациях.
Встроенные порты Ethernet 10/100 обеспечивают подключение ко многим ПЛК и HMI. RMC200 предлагается в облегченной и стандартной конфигурациях.Полностью поддерживаемый и доступный, но не рекомендуемый для новых разработок, RMC100 конфигурируется для управления до 8 осями. RMC100 программируется с помощью программного обеспечения Delta RMCWin.
| RMC100: 2-8 осей управления Широкие возможности настройки для широкого спектра приложений среднего размера |
Преимущество Delta
Покупая продукцию Delta, вы получаете гораздо больше, чем просто отличный продукт в упаковке.
- Производительность: Непревзойденное сочетание инженерной теории и прикладных ноу-хау приводит к созданию инновационных продуктов, обеспечивающих высокую производительность.
- Адаптивность: Ориентация на внедрение промышленных стандартов означает, что мы отвечаем вашим требованиям, а не просим вас об изменениях.

- Простота использования: Стремление к разработке продуктов, которые просты и интуитивно понятны в использовании, а также очень быстро применяются и запускаются.
- Сервис: Мы стремимся быть лидерами отрасли в области оперативной поддержки и обучения до, во время и после продажи новых и устаревших продуктов.
- Последняя ценность: Мы обеспечиваем качество, надежность и долгосрочную доступность. Политика Delta заключается в том, чтобы избегать устаревших продуктов, пока на них есть спрос.
Контроллеры перемещения
для индивидуальных систем
Контроллеры перемещения FAULHABER, доступные в корпусном и необорудованном вариантах, представляют собой высокодинамичные системы позиционирования и управляют двигателями постоянного тока, LM или BL.Здесь настраиваются контроллеры движения с помощью программного обеспечения FAULHABER Motion Manager. Приводы могут работать в сети через интерфейс полевой шины CANopen или EtherCAT (включен только в контроллеры движения V3. 0). В небольших установках подключение к Motion Control по сети также может быть выполнено через интерфейс RS232.
0). В небольших установках подключение к Motion Control по сети также может быть выполнено через интерфейс RS232.
Контроллеры движения работают в сети как подчиненные. Основная функция для управления другими осями не предусмотрена. После базового ввода в эксплуатацию с помощью программного обеспечения Motion Manager контроллеры также могут работать без интерфейса связи.
Motion Control – поколение V2.5
Контроллеры положения от FAULHABER поколения V2.5 предлагают проверенную технологию в области управления движением в сочетании с простой конфигурацией и вводом в эксплуатацию. Несмотря на простую конфигурацию, контроллеры движения предлагают разнообразные варианты конфигурации и доступны в самых маленьких размерах. Контроллеры движения успешно используются в самых разных отраслях промышленности, таких как медицинская и лабораторная техника, производство оборудования и автоматизация.
Контроллеры движения поколения V2.5 доступны для высокодинамичных систем позиционирования для приведения в действие различных двигателей и сенсорных систем. Ниже вы найдете список различных контроллеров движения для различных типов двигателей:
Ниже вы найдете список различных контроллеров движения для различных типов двигателей:
- MCDC 300x: двигатели постоянного тока с инкрементальным датчиком положения
- MCBL 300x: двигатели BL с аналоговыми сигналами Холла
- MCLM 300x: LM -двигатели с аналоговыми сигналами Холла
- MCBL 300x AES: BL-двигатели с абсолютным энкодером
Помимо использования в качестве сервопривода с контролируемым положением, скорость также можно контролировать с помощью контроллеров движения.С помощью встроенного регулятора тока ограничивается крутящий момент, а электроника и подключенный двигатель защищены от перегрузки.
Благодаря встроенным интерфейсам их также можно объединить в сети. Помимо работы на ПК, контроллер движения также может работать со всеми распространенными промышленными элементами управления.
Motion Control – поколение V3.0
По функциональным возможностям и производительности новое поколение контроллеров V3.0 превосходит серию контроллеров V2. 5.Далее вы найдете список основных характеристик поколения 3.0 в области управления движением:
5.Далее вы найдете список основных характеристик поколения 3.0 в области управления движением:
- Больше мощности, более быстрое управление и новые режимы работы
- Один контроллер для всех типов двигателей и систем кодировщиков
- Гибкое использование входов / выходов для заданных и фактических значений
- Дополнительные входы / выходы и интерфейсы
- Последовательные программы программируются на BASIC, для простой и локальной автоматизации во всех интерфейсных технологиях
- Расширенные диагностические функции
- Простой запуск с Motion Manager, начиная с версии 6.0
Контроллеры движения поколения FAULHABER V3.0 – это высокодинамичные, оптимально настроенные контроллеры позиционирования для использования в сочетании с микродвигателями постоянного тока, а также серводвигателями постоянного тока BL и LM. Тип двигателя можно настроить во время ввода в эксплуатацию с помощью FAULHABER Motion Manager версии 6.0 и выше.
Помимо использования в качестве сервопривода с контролируемым положением, можно также управлять скоростью или током. Фактические значения скорости и положения могут быть определены здесь с помощью ряда поддерживаемых сенсорных систем.Кроме того, концевые выключатели и контрольные выключатели могут быть подключены непосредственно к контроллерам движения. Контрольные уставки могут быть предварительно установлены через интерфейс связи и аналоговый вход или вход ШИМ или могут поступать из внутренних сохраненных последовательных программ.
FAULHABER Motion Manager – для оптимального управления движением
Мощное программное обеспечение FAULHABER Motion Manager доступно для ввода в эксплуатацию и конфигурирования приводных систем с контроллерами движения и скорости. Motion Manager обычно поддерживает интерфейсы RS232, USB и CANopen.Однако в зависимости от подключенного устройства может потребоваться использование интерфейсного адаптера, например, во время настройки системы управления движением через USB. Графический пользовательский интерфейс делает возможными единообразные и интуитивно понятные процедуры, независимо от семейства устройств и используемого интерфейса.
Графический пользовательский интерфейс делает возможными единообразные и интуитивно понятные процедуры, независимо от семейства устройств и используемого интерфейса.
«FAULHABER Motion Manager» для Microsoft Windows можно загрузить по следующей ссылке: https://www.faulhaber.com/de/support/faulhaber-motion-manager/
10 основных фактов о контроллерах движения
Кратко:
- Мацей («MJ») Лисиак, руководитель группы микроминиатюризации в Futek Advanced Sensor Technology, Inc.обсуждает следующее поколение конструкции и технологии сенсоров.
- Еще в 2018 году Лисиак поставил перед собой цель уменьшить габариты S-Beam Futek Jr, датчика размером с сахарный кубик, до размера кончика спички.
- Лисиак рассказывает, как платформа Futek Nano продолжает поддерживать интеллектуальные хирургические инструменты следующего поколения.
Создание миниатюрных датчиков для медицинской промышленности – нелегкая задача. Но это вызов, который Мацей («MJ») Лисиак готов принять в любой день.
Но это вызов, который Мацей («MJ») Лисиак готов принять в любой день.
Как руководитель группы микроминиатюризации в Futek Advanced Sensor Technology, Inc., Лисиак сосредоточен на создании одних из самых маленьких сенсоров на рынке. Разработка датчиков для уникальных приложений для мобильной электроники, изменение эстетики продукта и внедрение интеллектуальной интеграции и нестандартных подходов к рационализации для поддержки высокой масштабируемости являются обычным делом в его рабочей среде.
«Моя команда и я смогли постоянно изобретать и улучшать сенсорные технологии, и теперь у нас есть несколько патентов», – сказал Лисиак, чья карьера начиналась как стажер-конструктор в компании по производству высокопроизводительных моторизованных досок для серфинга.
Когда Лисиак присоединился к Futek в 2013 году, его намерением было создать фундамент для производства электроники. «Я был очень заинтересован в том, чтобы получить практический опыт работы с реальной инженерией и еще больше развить мою страсть к проектированию машин», – сказал он.
Возможность принесла пользу. «Моя команда и я смогли постоянно изобретать и улучшать сенсорные технологии, и теперь у нас за плечами несколько патентов», – сказал он.
В следующих вопросах и ответах Лисиак делится своими мыслями о том, как его команда в Micro Division Futek сосредоточена на расширении границ миниатюризации сенсоров.
Futek Advanced Sensor Technology, Inc.
Машиностроение : Датчики прошли долгий путь в быстром синтезе данных. Каковы, по вашему мнению, возможности для приложений MedTech, основанных на сенсорных технологиях FUTEK?
Мацей Лисиак : Когда дело доходит до приложений MedTech, ключ к нашему успеху лежит в мировоззрении Futek. История успеха датчика невозможна без малошумящей электроники формирования сигнала и программного обеспечения для сбора данных.Тот факт, что мы предлагаем эти комплексные решения (сенсор, электроника, программное обеспечение), делает нашу платформу очень уникальной, поскольку у нас есть ноу-хау и возможности объединить эти три святых Грааля сенсорных технологий под одной крышей.
Пожалуйста, имейте в виду, что у нас есть несколько инженерных и производственных групп, которые занимаются различными аспектами конструкции датчиков, включая силу, крутящий момент, давление [и] многокомпонентные приложения.
Моя команда, Micro Division, сосредоточена на расширении границ миниатюризации сенсоров.Это ключ к созданию следующего поколения устройств Med-Tech, поскольку микроминиатюризация позволяет нам, например, буквально довести сенсорные возможности до кончиков хирургических инструментов. Чем ближе вы сможете интегрировать сенсорные возможности в зону механического взаимодействия, тем точнее вы сможете контролировать процесс, позволяя датчику собирать чистые и актуальные данные.
Futek Advanced Sensor Technology, Inc.
Futek Advanced Sensor Technology, Inc.
MD : Пожалуйста, дайте нам обзор проблем или ограничений вашей команды при разработке миниатюрных сенсоров при разработке нанодатчиков для поддержки медицинских устройств.
ML: Наша первая серьезная задача была еще в 2018 году, когда у нас была цель взять наш Jr S-Beam, датчик размером с кубик сахара, который установил отраслевой эталон, и сжать его оболочку до размера. наконечника спички. В первые дни разработки это казалось нереальным.
Первым препятствием, которое нужно было преодолеть, был образ мышления; сначала мы должны были поверить в возможность выполнения этой задачи, а затем заручиться поддержкой высшего руководства для выполнения этой «невыполнимой миссии», которая поставила бы под сомнение статус-кво в отрасли.
Futek Advanced Sensor Technology, Inc.
С самого начала мы знали, что наносенсор представляет собой огромное потенциальное технологическое окно, которое мы пытались открыть. Первые Micro Gen 1 и Nano Gen 2 были ключевыми ступенями в плане миниатюризации, и мы представили первый функциональный датчик отпечатка 4 мм.
Затем нам пришлось решить вопросы надежности и высокой масштабируемости, чтобы успешно поддерживать приложения MedTech. Наличие многопрофильной команды с инженерами-конструкторами и инженерами-производителями, работающими в тесном сотрудничестве, было решающим в том, что позволило нам оптимизировать дизайн для оптимизированного производственного процесса.
Futek Advanced Sensor Technology, Inc.
MD : Расскажите нам об эволюции конструкции S-образной балки. Как эта технология развивалась с течением времени? Какая наименьшая конфигурация FUTEK достигла на сегодняшний день? Каковы его последние возможности?
ML: Основа подразделения FUTEK Micro – это эволюция оригинального линейного датчика силы Jr S-Beam LSB200, который мгновенно стал эталоном для OEM-приложений, в том числе в медицинской промышленности, благодаря своему миниатюрный конверт и возможность остановки при перегрузке.
Это действительно изменило правила игры в начале 2000 года, когда обычные датчики стояли на высоте нескольких дюймов. Jr S Beam нарушил кодекс своим 0,75-дюймовым. высокий корпус и способность выдерживать 1000% перегрузку без сбоев как при растяжении, так и при сжатии, что в то время было неслыханно для отрасли.
За последние несколько лет эволюция S-образной балки Jr продолжилась, поскольку мы разработали конструкции с расчетной усталостной нагрузкой, которые позволяют датчику сохранять свои рабочие характеристики при безотказном прохождении 100 миллионов циклов в двух направлениях с полной нагрузкой.
Мы еще больше расширили возможности Jr S-Beam, добавив коннектор, интеллектуальное распознавание, температурную компенсацию и двойное мостовое резервирование для наиболее важных медицинских приложений.
За Jr S-Beam последовала разработка платформы наносенсоров, в которой мы уменьшили габариты до размеров 4 мм x 4 мм.
Futek Advanced Sensor Technology, Inc.
MD : Опишите некоторые категории датчиков Futek, используемых в приложениях управления движением.
ML: Я специализируюсь на миниатюрных датчиках силы и давления, но у Futek есть команды разработчиков и производителей, которые сосредоточены исключительно на датчиках крутящего момента и реактивного крутящего момента, включая решения для измерения крутящего момента на микроуровне.
Отличным примером приложения для управления движением является хирургическая роботизированная рука со встроенными в сустав датчиками реактивного момента Futek, которые обеспечивают высокоточное управление, имитируя плавное движение руки хирурга. Этот аспект интеграции в приложение для роботизированного соединения подтолкнул наши конструкторские группы к уменьшению общего размера датчика крутящего момента на 60% по сравнению с традиционными решениями.
Датчики крутящего момента вращения – это очень сложные устройства, которые также широко используются в приложениях управления движением и могут обеспечивать не только крутящий момент, но также обратную связь по положению и частоте вращения. Возможности обработки с очень жесткими допусками являются ключевым аспектом создания высокопроизводительных датчиков крутящего момента. Компания Futek обладает впечатляющими возможностями собственной обработки и контроля с точностью до микрон, чтобы поддерживать некоторые из наиболее важных приложений.
Еще одна область нашей компетенции – разработка многокомпонентных датчиков.Одна из наиболее совершенных форм – датчики с шестью степенями свободы, которые обеспечивают обратную связь по осям x, y, z и крутящему моменту x, y, z. Это позволяет полностью динамически определять вектор в трехмерном пространстве.
Один из наших самых известных многокомпонентных датчиков был разработан и изготовлен для марсохода NASA «Марс Кьюриосити». Он был установлен на роботизированной буровой манипуляторе для контроля выемки образцов на поверхности планеты.
MD : Какую роль Futek играет в запросах на индивидуальный дизайн миниатюрных датчиков? Вы можете описать пример / вариант использования?
ML: У нас есть тысячи готовых стандартных продуктов на складе, доступных для немедленной доставки, но в случаях, когда специальный датчик необходим для очень уникального приложения, наши инженерные группы готовы спроектировать и разработать идеальное решение.
В таких случаях наши команды обычно участвуют на ранней стадии процесса развития клиентов, чтобы позволить нам предоставить наиболее эффективную систему обнаружения. Этот процесс требует тесного сотрудничества наших инженерных групп. Мы гордимся тем, что делаем все возможное, чтобы превзойти ожидания клиентов с точки зрения производительности, миниатюризации и возможностей интеграции.
Futek Advanced Sensor Technology, Inc.
Наши команды сначала обмениваются концептуальными проектами, и, как только мы согласовываем наиболее оптимальный маршрут, мы документируем его посредством подписания эскизного чертежа, который является технической формой инженерного контракта, который документирует результаты предварительного проектирования на основе исходных данных, предоставленных заказчиком.Следующий шаг включает запуск прототипа для тестирования и валидации, за которым следует официальный выпуск для производства.
Наличие собственных средств тестирования и валидации, центров высокоточной обработки и контроля, а также производственных цехов под одной крышей позволяет нам плавно переходить от прототипа к массовому производству с полным контролем процесса.
MD : Опишите некоторые особенности QLA414 [название модели сенсора Futek Nano Gen 3].
ML: Датчик Nano Gen 3, который каталогизирован под номером QLA414, действительно объединяет возможности интеграции нескольких датчиков в один. Это встроенный датчик с монтажными положениями M1, который позволяет измерять как силу растяжения, так и силу сжатия, аналогично его более крупному собрату Jr S-Beam, о котором я упоминал ранее.
Futek Advanced Sensor Technology, Inc.
Что действительно уникально в Nano, так это то, что он также является сквозным датчиком, что означает, что он может быть установлен на валу или микротросе, что может быть очень удобно для многих медицинских работников. Приложения.
Третий вариант интеграции – это измерение чистой силы сжатия, когда датчик закреплен с помощью нижнего винта для крепления, а точка контакта нагрузки выполняется на верхней монтажной поверхности.
При размере 4 мм x 5 мм датчик QLA414 Nano предлагает невероятные рабочие характеристики, которые работают с нелинейностью и гистерезисом менее 0,5%, что означает, что он конкурирует со своими более крупными братьями и сестрами.
У нас есть несколько патентов на ключевые компоненты этой революционной линейки продуктов, такие как неактивная упаковка, которая обеспечивает низкий уровень шума даже в очень динамичной среде.
Futek Advanced Sensor Technology, Inc.
Некоторыми из важных характеристик датчиков QLA414 Nano являются быстрый прогрев, сверхбыстрый отклик 98 кГц и очень низкий отклонение 0,00005 дюйма. Это означает, что датчик мгновенно готов к выполнению измерений с высокой частотной характеристикой и ограниченным эффектом отклонения для всей системы на уровнях, беспрецедентных в отрасли.
MD : Каковы возможности Nano Gen 3? В каких будущих приложениях, по вашему мнению, он будет использоваться?
ML: Хотя изначально мы сосредоточились на разработке решения QLA414, мы создали высокомодульную платформу Nano, которая позволяет настраивать широкий спектр настроек, полагаясь на стандартный, оптимизированный производственный процесс Nano, ускоряя новые сроки разработки.
В результате мы представили такие решения, как кнопка загрузки QLA424 с дополнительным уменьшением высоты на 25%, поддерживающая приложение сжатия без необходимости использования дополнительных инструментов для точечной загрузки и в еще более компактном корпусе.
Futek Advanced Sensor Technology, Inc.
Futek Advanced Sensor Technology, Inc.
Другим примером нано-итерации может быть заглушка QLA423 Gen X с приспособлениями для приварного монтажа с интеграцией на валу или микротросе, а также коннекторный интерфейс FPC.
Мы предполагаем, что платформа Nano продолжит поддерживать интеллектуальные хирургические инструменты следующего поколения. Он также может поддерживать приложения автоматизации, такие как роботизированный микрозахват, высокоскоростная система захвата полупроводников и даже Nano Futek Advanced Sensor Technology, Inc.
MD : Что сейчас происходит? проблемы для миниатюризации датчиков?
ML: Когда дело доходит до нашего стремления к дальнейшей миниатюризации сенсоров, чтобы сделать возможным следующее поколение продуктов MedTech и других появляющихся технологий, не видно конца.
Мне нравится сравнивать проблемы миниатюризации с переходом от динамики к квантовой физике. По мере того, как вы начинаете продвигать этот конверт, все меняется и требует пересмотра в соответствии с новыми законами, которые начинают применяться за пределами статус-кво.
Речь идет не только об уменьшении масштаба, но и о полном переосмыслении подхода к проектированию, контрольно-измерительных приборов, процессов обращения с продуктом и производства. Это цепная реакция, затрагивающая все, от методов контроля до производственного и испытательного оборудования.
Futek Advanced Sensor Technology, Inc.
MD : Взгляд в будущее: как интеллектуальные датчики становятся умнее? Какие технологии заменяют датчики? (Регистраторы данных?) И каким образом развитие других технологий, таких как робототехника, влияет на развитие датчиков?
ML: Хотя в целом автоматизация производственного типа существует уже более полувека, мы официально вступили в эру интеллектуальной автоматизации, позволяющей роботизированной системе поддерживать свою работу даже в непредсказуемых обстоятельствах.
Вот здесь-то и появляется аспект восприятия, позволяющий получить обратную связь по силе, из которой берут начало ИИ сбора данных и алгоритмы принятия решений. Хирургическая робототехника, вероятно, является одной из наиболее критически важных форм автоматизации, когда дело касается управления процессами, реакции системы и разрешения проблем.
Futek Advanced Sensor Technology, Inc.
MedTech очень уникален с точки зрения требований к продукту, таких как необходимость в датчике, выдерживающем процесс стерилизации с использованием насыщенного пара при 137 ° C и промывочной среды с высоким pH, что очень сложно для любого электронного устройства.Это прекрасный пример приспособляемости Futek к отраслевым требованиям, поскольку некоторые из наших запатентованных сенсорных продуктов способны выдерживать даже тысячи циклов стерилизации, превышающих все отраслевые стандарты.
10 главных советов – что нужно знать о контроллерах движения
Контроллеры движения – сложные животные, без сомнения. Но с помощью нескольких советов экспертов о правильных характеристиках, местоположении и способах предотвращения неудач выбрать правильный контроллер для работы так же просто, как раз, два, три.
1. Тщательно продумайте расположение контроллера.
Как и в сфере недвижимости, подумайте о местонахождении, местонахождении, местонахождении! Расположение контроллера в общей системе управления движением – единственный наиболее важный фактор, который может упростить или усложнить дизайн движений. Чтобы определить правильное расположение программного обеспечения управления движением и самого контроллера движений, инженеры должны задать себе три вопроса:
- Синхронизированы ли движения осей друг с другом?
- Какое время отклика требуется для обработки системных изменений?
- Насколько важна переносимость кода?
2.Архитектура программного обеспечения имеет значение.
Когда дело доходит до контроллеров движения, доступно так много различных опций, что выбор может показаться огромным. Просто помните, что действительно важно – программную архитектуру, которая будет использоваться для управления приложением. Написание программного обеспечения на хосте (обычно это означает ПК) обычно наиболее удобно, но наименее оперативно. С другой стороны, размещение всего программного обеспечения в контроллере движения, скорее всего, даст желаемую производительность, но может потребовать дополнительной работы, особенно если вам необходимо изучить язык движения, специфичный для производителя.Контроллеры движения, как правило, используют необработанное программное обеспечение, но не поддерживают стандартные компьютерные языки.
3. Организуйте свою проблему управления.
Рассмотрим контроллер движения на основе языка C, чтобы программное обеспечение можно было запускать на хосте или на контроллере движения, что упростило переразметку. Но самое главное – организовать проблему контроля. Отделите более медленные функции от высокоскоростных и убедитесь, что эти высокоскоростные функции находятся в контроллере движения.Сбор данных, отображение и другие функции управления данными могут выполняться на ПК.
4. Убедитесь, что ваш контроллер движений может справиться с худшими сценариями.
Механика, взаимодействующая с контроллером движения, может выйти из строя по некоторым очевидным причинам, например, подшипники становятся жестче, а параметры сервопривода больше не работают, но они также могут выходить из строя незначительными способами. Может ли контроллер вашего станка обрабатывать редкие, наихудшие события, такие как одновременное поступление команды движения, индексного импульса, концевого выключателя и окончания движения? Ожидайте худшего, и если повезет, этого не произойдет.Тестируйте раньше и чаще, в максимально широком диапазоне условий нагрузки и проектируйте с запасом. Многие инженеры гнались за собственным хвостом, пытаясь найти сбой, который случается раз в день или, что еще хуже, раз в неделю. Не существует волшебных ответов на эти сложные проблемы, но для начала нужно убедиться, что машина способна обрабатывать скопления одновременных событий.
Советы с 1 по 4, предоставленные Чаком Левином из Performance Motion Devices5. Сосредоточьтесь на соответствующих спецификациях.
Распространенная ошибка инженеров – сосредоточение внимания на несоответствующих спецификациях. Например, часто нет необходимости выбирать самую быструю частоту дискретизации, так как частоты дискретизации 1 кГц достаточно для всех, кроме самых маленьких высокопроизводительных двигателей. Подход лучше: подумайте о времени обработки, необходимом для выполнения программы вашего конкретного приложения.
6. Не переоценивайте потребности детерминизма.
Инженеры часто переоценивают требования к детерминированности системных коммуникаций.Неопределенность связи менее 100 микросекунд подходит почти для всех систем управления движением. Более жесткий детерминизм редко влияет на общую производительность системы.
7. Контроллеры движения – не волшебники.
Системные инженеры часто думают, что контроллеры движения могут компенсировать плохо спроектированную механическую систему. Хотя контроллеры движения могут преодолеть некоторые недостатки, такие как нелинейность, они не могут компенсировать грубые механические ошибки, такие как низкочастотные резонансы, малоразмерные двигатели, механику с большими мертвыми зонами и пружинные муфты.
8. Избегайте общего заземления.
Распространенная ошибка инженеров состоит в том, что у оптоизоляторов есть общая земля и источники питания. Если это одна и та же земля, она не изолирована. Инженеры считают, что эффект фильтрации, который они получают от изоляции, на самом деле является эффектом низких частот из-за медленности оптического сигнала.
Советы с 5 по 8 любезно предоставлены Уэйном Бароном из компании Galil Motion Control9. Выберите подходящий контроллер движения для работы.
Указание неправильного типа управления движением – распространенная проблема. Однако выбор правильного инструмента для работы может сэкономить как начальные затраты, так и время разработки. Например, многие одноосные приложения могут выполняться с использованием встроенного управления движением, доступного в цифровом приводе. То же самое верно и для простого многоосевого движения от точки к точке. Использование встроенного управления движением может сэкономить много денег и упростить программирование, поскольку вы можете использовать менее мощный ПЛК, в отличие от ПЛК со встроенным движением.
10. Знайте предупреждающие признаки надвигающейся неисправности.
Обычно проблемы с производительностью возникают при более высоких скоростях или большем числе осей. Например, некоторые элементы управления начинают терять производительность после того, как инженер добавляет 10-ю ось, что требует добавления другого процессора. Это приводит к проблемам, касающимся тесной координации осей, подключенных к разным процессорам, а также стоимости дополнительного процессора. Предупреждающие знаки начинают появляться, когда конструктор пытается увеличить скорость машины.Он или она начнет видеть пропущенные детали, неточное позиционирование и другие аномалии. При использовании интеллектуальных цифровых приводов эта проблема исчезает, поскольку каждый привод имеет свой собственный контур положения, тем самым снижая нагрузку на главный процессор движения.
Советы 9 и 10 предоставлены Джозефом Биондо из Festo Corp.Разведите двигатель в два раза быстрее.
Независимо от того, используете ли вы в своей конструкции бесщеточные двигатели постоянного тока, щеточные двигатели постоянного тока или шаговые двигатели, в Performance Motion Devices есть микросхемы, модули и платы управления перемещением мирового класса, которые повысят производительность, улучшат надежность и помогут вам быстрее вывести ваши продукты на рынок.
ИС управления движением (интегральные схемы)
Performance Motion Devices Микросхемы идеально подходят для конструкций машин, требующих точного управления положением, скоростью и крутящим моментом. Наши микросхемы содержат все необходимое для оптимизации производительности системы. Если вы положитесь на наши интегральные схемы, вы быстро выйдете на рынок и останетесь на нем.
Цифровые усилители
Если вы ищете функциональные возможности высокой выходной мощности с усовершенствованным цифровым контуром управления и усилителем, не ищите дальше.Наши прочные и сверхкомпактные цифровые усилители – ваше решение под ключ.
Цифровые приводы
Автономные приводыPMD обеспечивают интеллектуальность и мощность в компактном корпусе. Наши приводы поддерживают бесщеточные двигатели постоянного тока, щеточные двигатели постоянного тока и шаговые двигатели. Эти компактные, полностью закрытые приводы движения выпускаются в двух общих конфигурациях мощности – обеспечивающие усиление мощности 500 Вт и 3000 Вт в компактном корпусе для монтажа на DIN.
Платы управления движением
Платы управления движениемPMD обеспечивают от одной до четырех осей управления и выбираемые пользователем режимы профиля, включая S-образную кривую, трапециевидную форму, контурную диаграмму скорости и электронную передачу.Компенсация серво-контура использует полную 32-битную ошибку положения, ПИД-регулятор с упреждением скорости и ускорения, предел интегрирования и двойные двухквадратные фильтры для сложного управления сложными нагрузками.
Наборы разработчика
Запускайте, настраивайте и оптимизируйте с помощью интуитивно понятных и простых в использовании наборов разработчика. В комплект разработчика входят платы управления движением, программное обеспечение, документация и аксессуары, которые значительно сокращают время разработки продукта.
Sony представляет контроллер движения VR нового поколения для PS5 – Road to VR
В рамках подготовки к презентации своей следующей гарнитуры VR, Sony сегодня впервые представила свой контроллер VR следующего поколения для использования с PS5, который очень похож на контроллер Touch от Oculus.
Сегодня Sony продемонстрировала новый контроллер, подробно описав некоторые из наиболее значительных изменений, которые произойдут в ее экосистеме виртуальной реальности. Один большой сдвиг, который предвещают контроллеры: похоже, что VR-гарнитура следующего поколения компании будет включать в себя камеры на гарнитуре для оптического отслеживания контроллеров, а также, предположительно, среду для перемещения в масштабе комнаты. (Скатертью дорога, PS Camera и PS Move).
Изображение любезно предоставлено SonyЗа исключением сферической формы, которая, вероятно, скрывает светодиодные маркеры слежения, подобные Touch, все еще безымянные контроллеры, как говорят, содержат адаптивные триггеры в стиле Dual Sense в каждом контроллере, что позволяет разработчикам различать уровень силы обратная связь для создания уникальных ощущений, таких как рисование тетивы или стрельба из ружья.
Изображение предоставлено SonyТактильная обратная связь также стремится быть «эффектной, текстурированной и детализированной», – заявляет компания.
«Когда вы путешествуете по каменистой пустыне или обмениваетесь ударами в рукопашном бою, вы почувствуете разницу, увеличивая необыкновенные визуальные и звуковые впечатления, которые так важны для VR».
Изображение любезно предоставлено SonyКомпания заявляет, что контроллеры также будут иметь некоторую степень «обнаружения касания пальцами», что, по ее словам, «обнаружит ваши пальцы без какого-либо нажатия в тех областях, куда вы кладете большой, указательный или средний пальцы», – говорится в сообщении. Он призван обеспечить более естественные жесты руками во время игры.
В большей степени согласуясь с современными контроллерами движения VR, такими как Touch (отлично подходит для разработчиков), новый контроллер имеет то, что выглядит как стандартные кнопки и аналоговый джойстик, что с тех пор было принято многими потребительскими системами VR на данный момент.
Хотя это сложно сказать, похоже, что контроллеры имеют порт зарядки USB Type-C, что может означать, что внутри него несъемный аккумулятор, аналогичный Dual Sense.
Крупный план нижней рукоятки контроллера | Изображение любезно предоставлено Sony. Важно отметить, что в настоящее время не существует официальной схемы наименования для предстоящей VR-гарнитуры Sony следующего поколения.Также пока нет информации о дате выпуска, цене или технических характеристиках. В ближайшие дни мы будем внимательно следить за любой дополнительной информацией, так как ясно, что Sony накручивает ажиотаж в связи со своим следующим большим открытием VR.
Контроллерыв Windows Mixed Reality – Руководство для энтузиастов
- 10 минут на чтение
- Применимо к:
- Windows 10
В этой статье
Контроллеры движения– это аппаратные аксессуары, которые позволяют пользователям взаимодействовать в смешанной реальности.Преимущество контроллеров движения перед жестами заключается в том, что контроллеры имеют точное положение в пространстве, что позволяет детально взаимодействовать с цифровыми объектами. Для иммерсивных гарнитур Windows Mixed Reality контроллеры движения – это основной способ, с помощью которого пользователи будут действовать в своем мире.
Контроллеры движенияWindows Mixed Reality обеспечивают точное и быстрое отслеживание движения в вашем поле зрения с помощью иммерсивных датчиков гарнитуры. Нет необходимости устанавливать фурнитуру на стены в вашем помещении.Эти контроллеры движения предлагают такую же простоту настройки и портативность, как и иммерсивные гарнитуры Windows Mixed Reality.
Вы также можете использовать контроллер Xbox, мышь и клавиатуру или перемещаться, используя только свой голос.
Настройка контроллера движения
Большинство гарнитур поставляются предварительно сопряженными непосредственно с гарнитурой, но для некоторых ранних гарнитур требуется, чтобы контроллеры движения были сопряжены с вашим ПК с помощью Bluetooth 4.0. Когда вы впервые подключаете иммерсивную гарнитуру, вам нужно будет включить контроллеры движений во время настройки.Но если вам понадобится повторно соединить их позже, вот как:
- Запустите Портал смешанной реальности с подключенной гарнитурой.
- В нижнем левом углу выберите …> Настроить контроллеры .
- Вставьте две батарейки AA в каждый контроллер и переведите контроллер в режим сопряжения (см. Инструкции в разделе «Сопряжение контроллеров движения»
- Следуйте инструкциям на экране.
Примечание
- Для контроллеров, которые подключаются напрямую к вашему ПК, вам необходимо перевести их в режим сопряжения, включив их и затем нажав кнопку сопряжения внутри батарейного отсека, пока индикаторы не начнут мигать. Контроллеры движения
- поддерживают одновременное сопряжение только с одним ПК. Если вам нужно использовать их с другой гарнитурой, вам нужно будет выполнить сопряжение. См. Раздел Настройка Windows Mixed Reality .
Получите помощь при подключении
Важно
Есть контроллер Xbox?
Если у вас есть Bluetooth-контроллер Xbox, подключите его к компьютеру, чтобы использовать его с гарнитурой.
Если у вас есть проводной контроллер Xbox, подключите его к компьютеру.
В некоторых играх и приложениях контроллер Xbox используется иначе, чем в смешанной реальности. Чтобы использовать контроллер для игры или приложения, выберите Использовать как геймпад на панели приложений или скажите «Использовать как геймпад». Чтобы переключить контроллер обратно в режим смешанной реальности, снова выберите Использовать как геймпад или произнесите «Использовать взглядом».
Парные контроллеры движения
Если вы используете гарнитуру со встроенным контроллером Bluetooth, например Samsung Odyssey + или HP Reverb, ваши контроллеры уже должны быть сопряжены.Но вы все равно можете выполнить сопряжение контроллеров с помощью приложения настройки (оно должно быть уже установлено во время настройки HMD. Его также можно получить в магазине Microsoft).
Сопряжение контроллеров движения с HMD
Включите контроллеры, нажав кнопку Windows в течение 2 секунд, пока не загорятся светодиоды.
Снимите крышку батарейного отсека с контроллеров и найдите маленькую кнопку сопряжения на краю контроллера. Удерживайте эту кнопку, чтобы соединиться с вашим ПК.
Запустите Портал смешанной реальности с подключенной гарнитурой.
В нижнем левом углу выберите …> Настроить контроллеры .
Следуйте инструкциям на экране.
Сопряжение контроллеров движения с ПК
Вы можете подключить контроллер к ПК, добавив еще одно устройство Bluetooth.
Включите контроллеры и переведите их в режим сопряжения, как описано выше.
- Перейдите в Настройки компьютера
- Устройство / Добавить Bluetooth или другое устройство.
После завершения сопряжения светодиоды будут гореть непрерывно и ярко.
Общие проблемы
- Убедитесь, что на вашем ПК активен только один радиомодуль Bluetooth. Если у вас несколько радиомодулей Bluetooth, вам нужно отключить другие радиомодули в диспетчере устройств.
- Поместите ключ Bluetooth в порт, который находится на прямой видимости для ваших контроллеров и вдали от подключенных устройств USB 3.0. Известно, что USB 3.0 имеет радиочастотные помехи для Bluetooth (более подробную информацию см. В этом документе Intel). Порты USB 2.0 могут лучше работать с вашим ключом Bluetooth.
- Убедитесь, что ваш Bluetooth-ключ не подключен к USB-порту рядом с USB-кабелем HMD. Известно, что кабель гарнитуры также мешает работе адаптеров Bluetooth. Подключите ключ к USB-порту на передней панели вашего ПК для достижения наилучших результатов.
- Для портативных компьютеров: убедитесь, что Wi-Fi подключен к полосе частот 5 ГГц для оптимальной работы. Выберите значок беспроводной сети в правом нижнем углу области и выберите свойства для сети, которую вы используете. Ноутбуки, которые предназначены для совместной работы с антенной 2,4 ГГц для подключения Bluetooth и Wi-Fi, будут сталкиваться с перегрузкой данных из-за низкой скорости сети или плохой работы контроллера движения.
- Ваши контроллеры движения будут регулярно получать новые обновления программного обеспечения от Microsoft. Контроллеры будут показывать чередующийся режим мигания индикаторов при получении этих новых обновлений программного обеспечения. Это нормально. Перед использованием контроллеров дождитесь завершения обновления программного обеспечения. Контроллеры будут вибрировать, и постоянный свет заменит чередующиеся вспышки, когда это будет сделано.
- Вам может быть предложено «Надеть гарнитуру и использовать джойстик для телепортации» до того, как контроллеры завершат процесс обновления.Контроллеры не будут видны и недоступны для использования до завершения обновления. Большинство обновлений происходит в течение двух минут, но обновления могут длиться до 10 минут или около того. Дождитесь завершения обновления, прежде чем переходить к следующему шагу.
Использование контроллеров
Вот как перемещаться в смешанной реальности с помощью контроллеров движения, геймпада Xbox или мыши и клавиатуры.
Подсказка
Для переключения ввода между смешанной реальностью и рабочим столом нажмите клавишу с логотипом Windows + Y на клавиатуре компьютера.
| Для этого | Контроллеры движения | Геймпад | Мышь + клавиатура |
|---|---|---|---|
| Телепорт | Нажмите джойстик вперед, затем наведите контроллер в нужное место. Отпустите джойстик. | Нажмите левый мини-джойстик вперед и посмотрите, куда хотите. Отпустите джойстик. | Выберите и удерживайте правую кнопку, затем наведите указатель мыши на то место, куда хотите перейти.Отпустите кнопку. |
| Выбрать | Наведите контроллер, затем нажмите на спусковой крючок или используйте тачпад. | Посмотрите на цель, затем нажмите A. | Наведите указатель мыши, затем щелкните левой кнопкой мыши. |
| Открыть меню «Пуск» | Нажмите кнопку Windows . | Нажмите кнопку Xbox . | Нажмите клавишу с логотипом Windows . |
| Оставить иммерсивное приложение | Нажмите кнопку Windows .Затем выберите Дом смешанной реальности в меню быстрых действий. | Нажмите кнопку Xbox . Затем выберите Дом смешанной реальности кнопку в меню быстрых действий. | Нажмите клавишу с логотипом ** Windows. Затем нажмите кнопку Дом смешанной реальности в появившемся меню быстрых действий. |
| Повернуть | Переместите джойстик влево или вправо. | Переместите правый джойстик влево или вправо. | Не доступен. |
| Резервное копирование | Переместите аналоговый стик назад. | Переместите левый джойстик назад. | Не доступен. |
| Прогулка | Нажмите на аналоговый стик прямо вниз, затем нажмите на него в том направлении, в котором вы хотите идти. | Нажмите на левый джойстик прямо вниз, а затем нажмите на него в том направлении, в котором вы хотите идти. | Не доступен. |
| Перемещение окна приложения | Наведите указатель мыши на панель приложения. Нажмите и удерживайте спусковой крючок, чтобы захватить окно, затем используйте контроллер, чтобы переместить его в любом направлении.Отпустите курок. | Посмотрите на панель приложения, затем нажмите и удерживайте A, чтобы захватить окно. Используйте левый джойстик, чтобы перемещать окно из стороны в сторону или вверх и вниз. Используйте триггеры, чтобы перемещать его ближе и дальше. Затем отпустите A. | Наведите указатель мыши на панель приложения. Щелкните левой кнопкой мыши и удерживайте, чтобы захватить окно, затем с помощью мыши переместите его из стороны в сторону или вверх и вниз. Используйте колесо прокрутки, чтобы переместить окно ближе или дальше. Отпустите кнопку мыши. |
| Перемещение 3D-объекта | Укажите на объект, затем нажмите и удерживайте спусковой крючок, чтобы схватить его.Переместите его в любом направлении с помощью контроллера, затем отпустите курок. | Посмотрите на объект, затем нажмите и удерживайте A, чтобы схватить его. Используйте левый джойстик, чтобы перемещать окно из стороны в сторону или вверх и вниз. Используйте триггеры, чтобы перемещать его ближе и дальше. Затем отпустите A. | Наведите указатель мыши на объект. Щелкните левой кнопкой мыши и удерживайте, чтобы захватить его, затем с помощью мыши переместите его из стороны в сторону или вверх и вниз. Чтобы переместить его ближе или дальше, используйте колесо прокрутки. Отпустите кнопку мыши. |
| Поворот или изменение размера окна приложения | Наведите один контроллер на панель приложения, а другой – в любое место окна.Удерживая оба триггера, сдвиньте контроллеры вместе или по отдельности, чтобы изменить размер. Чтобы повернуть, переместите один контроллер к себе, а другой – от себя. Отпустите триггеры. | Выберите Настроить на панели приложения. Посмотрите на угол рамки настройки, затем нажмите A, чтобы выбрать его. Используйте левый джойстик, чтобы изменить размер окна. | Выберите Настроить на панели приложения. Выберите и удерживайте угол рамки настройки, затем с помощью мыши измените размер окна. |
| Поворот или изменение размера 3D-объекта | Наведите оба контроллера на объект.Удерживая оба триггера, сдвиньте контроллеры вместе или по отдельности, чтобы изменить размер. Чтобы повернуть, переместите один контроллер к себе, а другой – от себя. | Выберите Настроить на панели приложения, а затем переместите объект с помощью левого джойстика. | Выберите Настроить на панели приложения, затем выберите и удерживайте объект и с помощью мыши переместите его. |
| Прокрутка в окне приложения | Нажмите и удерживайте спусковой крючок, затем переместите контроллер вверх или вниз. | Используйте крестовину. | Используйте колесо прокрутки мыши. |
| Увеличение или уменьшение масштаба окна приложения | Нажмите на оба триггера, затем переместите контроллеры ближе или дальше друг от друга. | Нажмите правый триггер для увеличения и левый триггер для уменьшения. | Используйте колесо прокрутки мыши, удерживая нажатой клавишу CTRL на клавиатуре. |
| Открыть меню | Нажмите кнопку Меню . | Нажмите кнопку Меню . | Щелкните правой кнопкой мыши. |
Что означают вибрация и свет
Ваш контроллер сообщает вам, что он делает, вибрируя и мигая светодиодами.
| Когда ваш контроллер делает это | Значит это |
|---|---|
| Светодиоды включаются, и контроллер однократно вибрирует | Включение |
| Светодиоды выключаются, а контроллер дважды вибрирует | Выключение |
| Светодиоды мигают каждые 3 секунды | Спящий |
| Светодиоды медленно мигают, а контроллер однократно вибрирует | Вход в режим сопряжения |
| Контроллер один раз вибрирует | Подключение или отключение от компьютера |
| Светодиоды ярко горят | Контроллеры, отслеживаемые гарнитурой |
| Светодиоды тускло горят | Контроллеры не отслеживаются гарнитурой |
| Контроллер трижды вибрирует, а затем выключается | Критический уровень заряда батареи |
| Наружное и внутреннее кольца светодиодов мигают попеременно | Обновление |
Обновление прошивки контроллеров движения
- Если к вашему ПК подключена иммерсивная гарнитура и доступна новая микропрограмма контроллера, она будет автоматически загружена на контроллеры движения при следующем включении. Обновления микропрограммного обеспечения контроллера
- показаны в виде кругового свечения светодиодных секторов, что занимает 1-2 минуты. Обновление прошивки иногда может занимать больше времени, до 10 минут, что может указывать на плохое соединение Bluetooth или радиопомехи.
- В случае, если обновление прошивки прервано (контроллер выключен или батарея разряжена), оно будет выполнено повторно при следующем включении питания.
- После завершения обновления прошивки контроллеры перезагрузятся и снова подключатся.
- Теперь оба контроллера должны быть подключены. Перейдите на портал смешанной реальности, чтобы проверить состояние ваших контроллеров.
- Убедитесь, что ваши контроллеры работают правильно:
- Запустите Портал смешанной реальности и войдите в свой дом смешанной реальности.
- Переместите контроллеры и проверьте отслеживание, проверьте кнопки и убедитесь, что телепортация работает. Если это не так, обратитесь к разделу , посвященному устранению неполадок контроллера движений.
