
Вечный двигатель первого рода
Вечный двигатель, перпетуум-мобиле (латинское perpetuum mobile переводится вечное движение) — воображаемая машина, которая, будучи раз пущена в ход, совершала бы работу неограниченно долгое время, не заимствуя энергии извне. Возможность работы такой машины неограниченное время означала бы получение энергии из ничего.
Идея вечного двигателя возникла в Европе, по-видимому, в XIII веке (хотя существуют свидетельства, что первый проект вечного двигателя предложил индиец Бхаскара в XII веке). До этого проекты вечных двигателей неизвестны. Их не было у греков и римлян, которые разработали множество эффективных механизмов и заложили основы научных подходов к изучению природы. Ученые предполагают, что дешевая и практически неограниченная рабочая сила в виде рабов тормозила в античности разработку дешевых источников энергии.
Почему люди так упорно хотели построить вечный двигатель?
В этом нет ничего удивительного.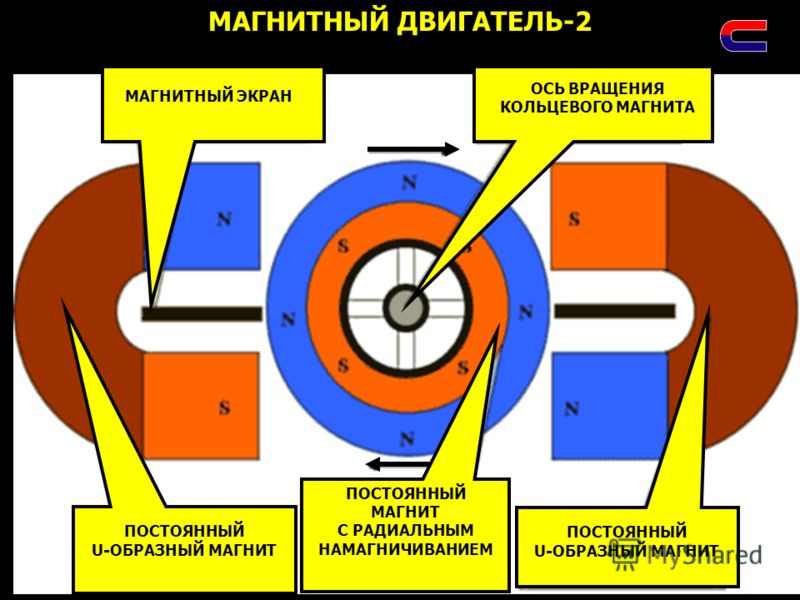
Еще популярнее идея вечного двигателя стала в XVI-XVII веках, в эпоху перехода к машинному производству. Число известных проектов вечного двигателя перевалило за тысячу. Создать вечный двигатель мечтали не только малообразованные ремесленники, но и некоторые крупные ученые своего времени, так как тогда не существовало принципиального научного запрета на создание такого устройства.
Уже в XV-XVII веке прозорливые естествоиспытатели, такие как Леонардо да Винчи, Джироламо Кардано, Симон Стевин, Галилео Галилей сформулировали принцип: «Создать вечный двигатель невозможно».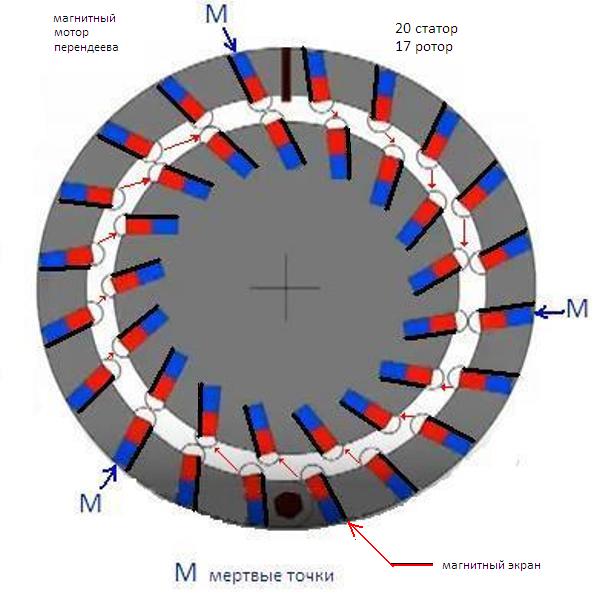
К середине XVIII века, после многовековых попыток создать вечный двигатель, большинство ученых стали считать, что сделать это невозможно. Это был просто экспериментальный факт.
С 1775 года Французская академия наук отказалась рассматривать проекты вечного двигателя, хотя и в это время у французских академиков не было твердых научных оснований принципиально отрицать возможность черпать энергию из ничего.
Невозможность получения дополнительной работы из ничего была твердо обоснована лишь с созданием и утверждением как всеобщего и одного из самых фундаментальных законов природы «закона сохранения энергии».
Сначала Готфрид Лейбниц в 1686 году сформулировал закон сохранения механической энергии. А закон сохранения энергии как всеобщий закон природы сформулировали независимо Юлиус Майер (1845), Джеймс Джоуль (1843–50) и Герман Гельмгольц (1847).
Врач Майер и физиолог Гельмгольц сделали последний важный шаг. Они установили, что закон сохранения энергии справедлив для животных и растений. До этого существовало понятие «живая сила» и считалось, что для животных и растений законы физики могут не выполняться. Таким образом, закон сохранения энергии был первым принципом, установленным для всей познанной Вселенной.
Последним штрихом в обобщении закона сохранения энергии стала специальная теория относительности Альберта Эйнштейна (1905 г.). Он показал, что закон сохранения массы (был такой закон) — часть закона сохранения энергии. Энергия и масса эквивалентны по формуле Е = mс2, где с — скорость света.
Далее: Вечный двигатель второго рода
Лженаука и аферисты. Вечный двигатель / Хабр
Патенты США• 3913004 от 14 октября 1975, Метод и аппаратура для увеличения электрической мощности, Роберт Александер.
• 4975608 от 4 декабря 1990, Мотор с переключаемым магнитным сопротивлением, Гарольд Аспден.
• 5288336 Преобразователь тепла в электричество, Гарольд Аспден.смотри также патенты номер 5,065,085 и 5,101,632
• 4622510 от 11 ноября 1986, Параметрическая электромашина, Фердинанд Кап.
• 2912244 от 1959 года, Гравитационная система, Отис Карр.
• 4006401 от 1 февраля 1977, Электромагнитный генератор, В Ривас.
• 3811058, 3879622 Моторы на постоянных магнитах.
• 4595843 от 17 июня 1986, Трансформатор вращающегося магнитного потока с сердечником с низкими потерями, Роберт Дель Вечио.
• 4567407 от 28 января 1986, Мотор — альтернатор, Джон Эклин.
• 3368141 от 6 января 1968, Трансформатор в сочетании с постоянными магнитами, Карлос Гарон.
• 3890548 от 17 июня 1975, Мотор с пульсирующим конденсаторным разрядом, Эдвин Грей.
• 4595852 от 17 июня 1986, Электростатический генератор, Роберт Гандлах.
• 4831299 от 16 мая 1989, Униполярный генератор переменного тока, Енакиши Хайсака.
• 4249096 от 3 февраля 1981, Электрическое динамо, Барбара Никокс.

• 3610971 от 5 октября 1971, Электродвижущий генератор электрического поля, Виллиямс Купер.
• 4897592 от 30 января 1990, Система, создающая мощность из энергии электростатического поля, Виллиямс Хайд.
• 4151431 от 24 апреля 1979, Мотор с постоянными магнитами, Говард Джонсон.
• 4806834 от 21 февраля 1989, Электрическая цепь индуктивных проводников, трансформаторов и моторов, Эрл Кениг.
• 3374376 от 19 марта 1968, Электрический генератор, Раймонд Кромри.
• 3977191 от 31 августа 1976, Источник мощности… Роберт Бритт.
• 3670494, Метод конвертирования атомной энергии в полезную кинетическую энергию.
• 4428193, Система извлечения полезной работы из топлива. В качестве топлива используется смесь инертных газов, циркулирующая в закрытой системе.
• 4709323 от 24 ноября 1987, Конвертор параллельного резонанса, Чарльз Лиен.
• 5146395 от 8 сентября 1992, Источник мощности, использующий две накопительные цепи, Ричард Мак Ки.
• 4210859 от 1 июня 1980, Индуктивное устройство, имеющее две ортогональные обмотки, Пауль Мерестский.

• 4500827 от 19 февраля 1985, Линейный электрический генератор, Томас Мерит.
• 4945273 от 31 июля 1990, Высокоэффективная электрическая машина, Джозеф Пинкертон.
• 4883977 от 28 ноября 1989, Преобразователь магнитной мощности, Деннис Реган.
• 4077001 Электромагнитный преобразователь со стационарными элементами, имеющими изменяемое магнитное сопротивление, Франк Ричардсон.
• 5018180 от 21 мая 1991, Конверсия энергии, использующая заряд высокой плотности, Кеннет Шолдерс.
• 4652771 от 24 марта 1987, Трансформатор с колебаниями магнитного потока, Теодор Спич.
• 4772816 от 20 сентября 1988, Система конверсии энергии, Джефри Спенс.
• 4748311 от 31 мая 1988, Инвертор с источником мощности для прерывателя параллельной резонансной цепи, настроенной на удвоенную частоту прерывателя, Фридрих-Вернер Томас.
• Международный патент H02K 31/00, 39/00 от 24 июня 1982, Замкнутая часть униполярной машины, Адам Тромбли.
• 4835433 1987 год, Аппаратура для непосредственного преобразования энергии радиоактивного распада в электрическую энергию, Браун П.М.
• Патенты США по электрогравитации: 1363037 Goddard 21 Декабря 1920; 2004352 Simon 11 Июня, 1935; 2210918 Karlovitz 13 Августа, 1940; 2588427 Stringfield 11 Марта, 1952; 2231877 Bennet 18 Февраля 1941; 2279586 Bennet 14 Апреля 1942; 2305500 Slayter 15 Декабря 1942.
• Английский патент номер 300,311 от 15 Августа 1927, Устройство для производства силы или движения при помощи электродов, Таунсенд Браун.
• Французский патент номер 1003484 от 11/1951 года.
Электрогравитация.
• 3187206 от 1 июня 1965, Электрокинетическая аппаратура, Таунсенд Браун.
• 3022430 от 20 февраля 1962, Электрокинетический генератор, Таунсенд Браун.
• 3018394 от 23 января 1962, Электрокинетический преобразователь, Таунсенд Браун.
• 2949550 от 16 августа 1960, Электрокинетическая аппаратура, Таунсенд Браун.

• 4687947 от 18 Августа 1987, Электрическая цепь сохранения мощности, Мельвин Кобб.
• 4772775 от 20 Сентября 1988, Генерация потока плазмы в электрической дуге, Сэм Лич.
• 4432098 и 4429280, Передача информации при помощи магнитного векторного потенциала, Рейнолдс Гелинас.
• Великобритания, No. 547668, 30 января ( 7 сентября ) 1942 года, Мотор с постоянными магнитами, автор Стенли Хичкок.
• Великобритания, Заявка No.2282708A, Мотор с постоянными магнитами, Роберт Адамс, Гарольд Аспден.
Патенты по расщеплению воды и использованию ее в качестве топлива, в том числе по «холодному синтезу»
• 4394230 патент США от 19 Июля 1983, Метод и аппаратура для расщепления молекул воды, Генри К. Пухарич.
• 2251775 патент Великобритании от 20 Апреля 1994, Термоэлектрическая конверсия, Гарольд Аспден.
Организации и центры по изучению технологий свободной энергии
• Русское Физическое Общество, 141002, Московская обл.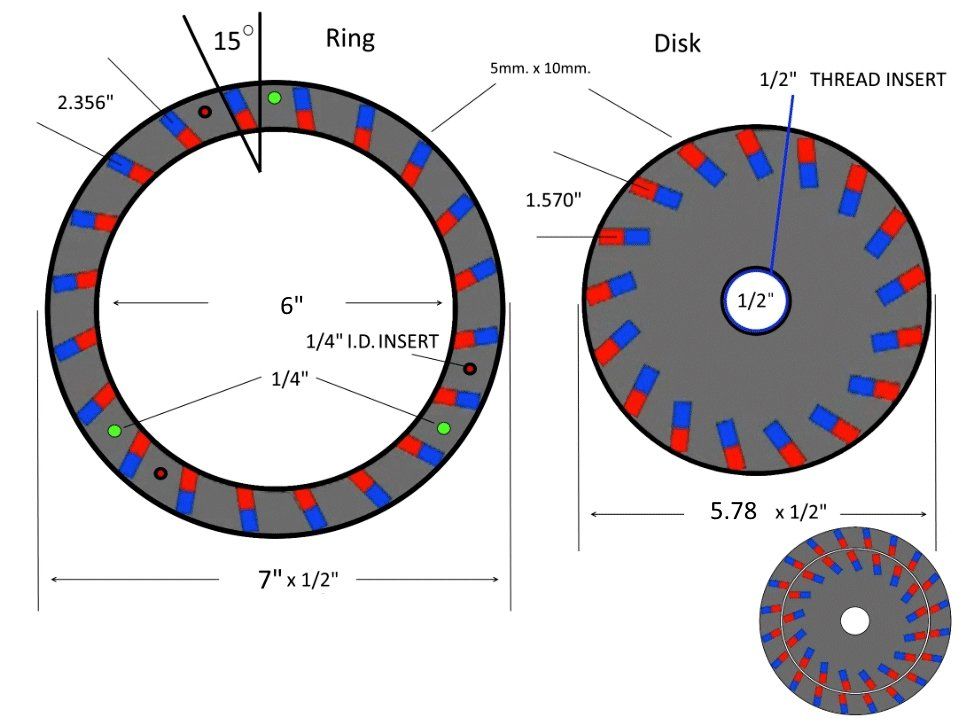 , Мытищи, Б.Шараповская 3. Факс 095-2926511. Издает журналы.
, Мытищи, Б.Шараповская 3. Факс 095-2926511. Издает журналы.
• Институт Свободной Энергии, Санкт-Петербург, 193024, а/я 37. Общественная организация, база данных по исследованиям в области гравитации и альтернативной энергетике.
• Academy for Future Sciences, P.O.Box FE, Los Gatos, CA 95031, USA.
• AERI, Advanced Energy Research Institute, 14 Devonshire Mews West, London W1N 1Fp, Great Britain.
• ADAS, Association of Distinguished American Scientists,P.O.Box 1472, Huntsville, AL 35807, USA. Fax 205-536-0411.
• Borderland Sciences Research Foundation, P.O.Box 429, Garberville, CA 95440-0429, USA.
• COSRAY, The Research Institute, Inc., 2505 South Forth Street East, P.O.Box 651045, Salt Lake City, UT 84165-1045, USA.
• Delta Spectrum Research, Inc., 5608 South 107th East Av., Tusla, Oklahoma 74146 USA.
 Fax 918-459-3789. База данных по коммерческим проектам в области свободной энергии, в электронном виде — около 11 Мб. Высылает статьи по работам NASA в области электрогравитации:
Fax 918-459-3789. База данных по коммерческим проектам в области свободной энергии, в электронном виде — около 11 Мб. Высылает статьи по работам NASA в области электрогравитации:Electrostatic levitator with feedback control; Hybrid contactless heating and levitator; Precision fabrication of electromagnetic-levitation coils и другие.
• Electrodynamic Gravity, Inc., 35 W.Tallmadge Ave., Akron, Ohio 44310, USA.
• Fusion Information Center, P.O.Box 58639, Salt Lake City, Utah 84158-0369, издает журнал о работах по «холодному синтезу» Fusion Facts, fax 801-583-6245.
• Gravity Power Research Association, 36 Mountain Road, Burlington, MA 01803, USA.
• GRI, Group Research Institute, P.O.Box 438, Nelson, New Zealand. Dr. Ashley Gray.
• High Energy Enterprises, P.O.Box 5636, Security, CO 80931, USA. Fax 719-4750582. Издает книги Тесла и результаты работ его последователей. International Tesla Society Books.
• Institute for Advanced Studies at Austin, 4030 Braker Lane W.
 , Suite 300, Austin, TX 78759, USA.
, Suite 300, Austin, TX 78759, USA.• INE, Institute for New Energy, 1304 South College Avenue, Fort Collins, CO 80524, USA. Издает журнал New Energy News, P.O.Box 58639, Salt Lake City, UT 84158-8639, USA. Доступ по EMAIL: [email protected].
Выслает сборник докладов конфренции по развивающимся проектам свободной энергии Denver Report’94.
• Intergrity Institute, 1377 K Street, NW, Suite 16, Washington DC, USA. Fax 202-543-3069. Исследования по электрогравитации, инерциальным движителям, отрицательная масса, как энергетический источник.
Распространение материалов о работах Т.Т.Брауна по электрогравитации.
• JPI, Japan Psychrotronic Institute, Dr. Shiuji Inomata, Electrotechnical Laboratory, 1-1-4 Umezono, Tsukuba-shi, Ibaraki 305, Japan.
• Cosmic Energy Association, 37-2 Nisigoshonouti, Kinugasa, Kitaku, Kyoto, 603, Japan. Dr. Masayoshi Ihara.
• Orgone Biophysical Research Laboratory, Inc.,P.O.Box 1395, E1 Cerrito, CA 94530, USA.
 Fax 510-526-5978.
Fax 510-526-5978.• Quantum Biology Research Laboratory, Cotati Research Institute, P.O.Box 60653, Palo Alto, CA 94306, USA.
• PACE, Planetary Association for Clean Energy, Главный оффис в Канаде: 100 Bronson Av., Suite 1001, Ottawa, Ontario, Canada T1R 6G8. Fax 613-235-5876. Европейское представительство в Германии:
Planetartsche Vereinigung fur Saubere Energie, Inc. Feyermuhler Strasse 12, D-53894 Mechernich, FRG. Fax 49-24438221, EMAIL [email protected]. Представительство в Латинской Америке:
FUNDAPAC Allayme 1719, San Jose, Guaymallen, Argentina.
• SEA, Space Energy Association, P.O.Box 11422, Clearwater, FL 34616, USA.
• Tesla Book Company, P.O.Box 121873, Chula Vista, CA 91912, USA.
• Tesla Incorporated, 760 Prairie Av., Craig, CO 81625, USA. Fax 303-824-7864. Модем 300/1200/2400 для Tesla BBS по телефону 719-486-2775.
• ExtraOrdinary Science, Resource Guide, fax 719-475-0582. Официальный каталог книг, статей, видеоматериалов и баз даных Общества Тесла.
• Журнал Explore, The New Dimension in Scientific Approach,P.O.Box 1508, Mount Vernon, Washington 98273, USA.
• Журнал Electric Spacecraft Journal, P.O.Box 18387, Asheville, NC 28814, USA. Fax 704-683-3511.
• Журнал Nexus New Times Magazine, P.O.Box 30, Maplepton Qld 4560, Australia. Fax 074-429381.
• Журнал Cold Fusion Times, P.O.Box 81135, Wellesley Hills MA 02181, USA.
• Журнал Infinite Energy, P.O.Box 2816, Concord, NH 03302-2816, USA. Издается центром Cold Fusion Technology, fax 603-224-5975, email: [email protected].
• Журнал 21th Century Science & Technology, P.O.Box 16285, Washington, DC, 20041, USA.
• Журнал Cold Fusion, 70 b Route 202N, Petersborough, NH 03458, USA.
• Brown’s Gas International, 5063 Densmore Av., ENCINO, California 91436, USA. Изобретатель «газа Брауна», Yull Brown. Факс 818-990-4873 в США.
• ENECO, Inc., 391-B Chipeta Way, Salt LAke City, Utah 84108, USA. Fax 801-5836245.
 Развивает несколько устройств генерации мощности за счет холодного синтеза как с тяжелой, так и с легкой водой.
Развивает несколько устройств генерации мощности за счет холодного синтеза как с тяжелой, так и с легкой водой.• «Robert Adams and Company» 46 Landing Road, Whakatane, Bay of Plenty, New Zealand. Роберт Адамс, исследования по созданию мотора-генератора с постоянными магнитами.
• Methernitha, 3517 Linden, Switzerland. Менеджер Francis Bosshard.
• Swiss Association for Free Energy, P.O.Box 10, 5704 Egliswilli, Switzerland.
• Space Research Institute, Box 33, Uwajima, Ehime 79, Japan. Dr. Shinichi Seike. Fax 895-24-7325. Эксперименты по гравитации и изменению темпа хода времени при работе генераторов свободной энергии, измерения хрональных потенциалов.
• Nuclear Power Corporation, 581 400 Karnataka, India. Project Director, Kaiga Project, Dr. Paramahamsa Tewari.
• Cosmic Energy Foundation, Neptunuslaan 11, 3318 E1 Dordrecht Netherlands. Dr. Martin Holwerda, Director.
• World Harmony, P.O.Box 361 Applecross 6153, Western Australia.

Другой оффис данной группы: U.S.World Harmony, P.O.Box 317, Rainier, WA 98576, USA.
• Sabberton Research, P.O.Box 35, Southampton SO9 7BU, England, Dr. Harold Aspden.
Источник: Персональные системы свободной энергии
Вечный двигатель первого рода – это… Что такое Вечный двигатель первого рода?
Ве́чный дви́гатель (лат. Perpetuum Mobile) — воображаемое устройство, позволяющее получать полезную работу, большую, чем количество сообщённой ему энергии (КПД больше 100 %).
Современная классификация вечных двигателей
- Вечный двигатель первого рода — двигатель (воображаемая машина), способный бесконечно совершать работу без затрат топлива или других энергетических ресурсов. Их существование противоречит первому закону термодинамики. Согласно закону сохранения энергии, все попытки создать такой двигатель обречены на провал.
- Вечный двигатель второго рода — воображаемая машина, которая будучи пущена в ход, превращала бы в работу всё тепло, извлекаемое из окружающих тел (см.
 Демон Максвелла). Они противоречат второму закону термодинамики. Согласно Второму началу термодинамики, все попытки создать такой двигатель обречены на провал.
Демон Максвелла). Они противоречат второму закону термодинамики. Согласно Второму началу термодинамики, все попытки создать такой двигатель обречены на провал.
История
Индийский или арабский перпетуум мобиле с небольшими косо закрепленными сосудами, частично наполненными ртутью.
Попытки исследования места, времени и причины возникновения идеи вечного двигателя — задача весьма сложная. Не менее затруднительно назвать и первого автора подобного замысла. К самым ранним сведениям о Perpetuum mobile относится, по-видимому, упоминание, которое мы находим у индийского поэта, математика и астронома Бхаскары, а также отдельные заметки в арабских рукописях XVI в., хранящихся в Лейдене, Готе и Оксфорде[1]. В настоящее время прародиной первых вечных двигателей по праву считается Индия. Так, Бхаскара в своем стихотворении, датируемом примерно 1150 г., описывает некое колесо с прикрепленными наискось по ободу длинными, узкими сосудами, наполовину заполненными ртутью.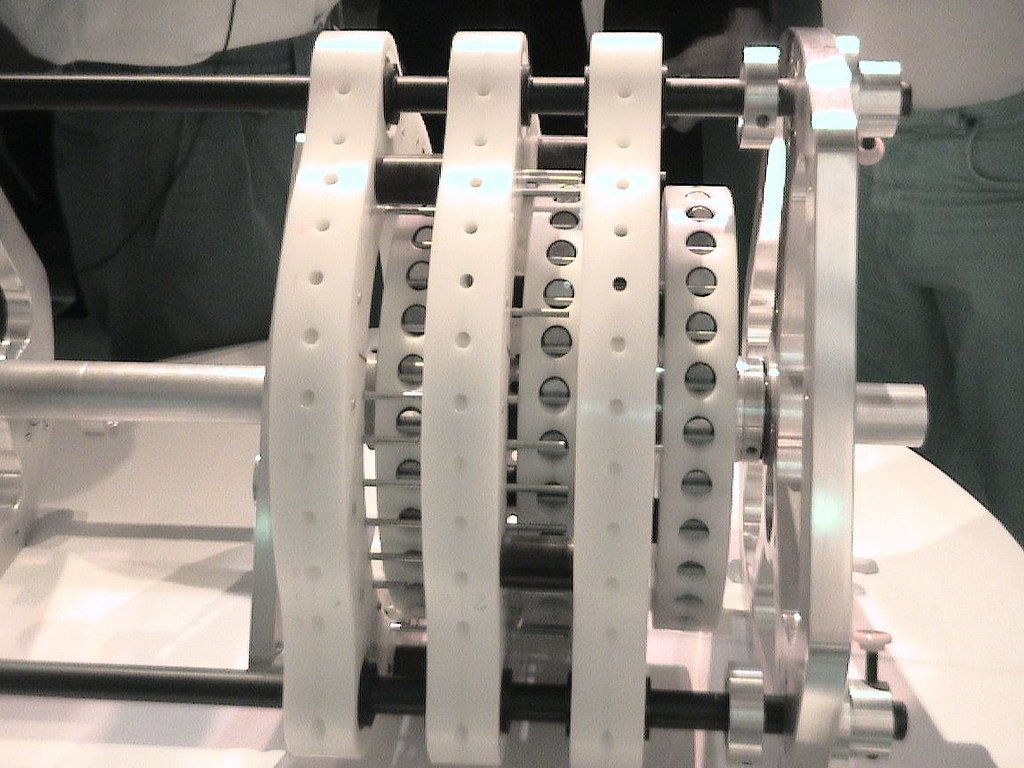 Принцип действия этого первого механического перпетуум мобиле был основан на различии моментов сил тяжести, создаваемых жидкостью, перемещавшейся в сосудах, помещенных на окружности колеса. Бхаскара обосновывает вращение колеса весьма просто: «Наполненное таким образом жидкостью колесо, будучи насажено на ось, лежащую на двух неподвижных опорах, непрерывно вращается само по себе». Первые проекты вечного двигателя в Европе относятся к эпохе развития механики, приблизительно к XIII веку. К XVI — XVII векам идея вечного двигателя получила особенно широкое распространение. В это время быстро росло количество проектов вечных двигателей, подаваемых на рассмотрение в патентные ведомства европейских стран. Среди рисунков Леонардо Да Винчи была найдена гравюра с чертежом вечного двигателя.
Принцип действия этого первого механического перпетуум мобиле был основан на различии моментов сил тяжести, создаваемых жидкостью, перемещавшейся в сосудах, помещенных на окружности колеса. Бхаскара обосновывает вращение колеса весьма просто: «Наполненное таким образом жидкостью колесо, будучи насажено на ось, лежащую на двух неподвижных опорах, непрерывно вращается само по себе». Первые проекты вечного двигателя в Европе относятся к эпохе развития механики, приблизительно к XIII веку. К XVI — XVII векам идея вечного двигателя получила особенно широкое распространение. В это время быстро росло количество проектов вечных двигателей, подаваемых на рассмотрение в патентные ведомства европейских стран. Среди рисунков Леонардо Да Винчи была найдена гравюра с чертежом вечного двигателя.
Неудачные конструкции вечных двигателей из истории
Рис. 1. Одна из древнейших конструкций вечного двигателя
На рис. 1 показана одна из древнейших конструкций вечного двигателя. Она представляет зубчатое колесо, в углублениях которого прикреплены откидывающиеся на шарнирах грузы. Геометрия зубьев такова, что грузы в левой части колеса всегда оказываются ближе к оси, чем в правой. По замыслу автора, это, в согласии с законом рычага, должно было бы приводить колесо в постоянное вращение. При вращении грузы откидывались бы справа и сохраняли движущее усилие.
Она представляет зубчатое колесо, в углублениях которого прикреплены откидывающиеся на шарнирах грузы. Геометрия зубьев такова, что грузы в левой части колеса всегда оказываются ближе к оси, чем в правой. По замыслу автора, это, в согласии с законом рычага, должно было бы приводить колесо в постоянное вращение. При вращении грузы откидывались бы справа и сохраняли движущее усилие.
Однако, если такое колесо изготовить, оно останется неподвижным. Дифференциальная причина этого факта заключается в том, что хотя справа грузы имеют более длинный рычаг, слева их больше по количеству. В результате моменты сил справа и слева оказываются равны.
Рис. 2. Конструкция вечного двигателя, основанного на законе Архимеда
На рис. 2 показано устройство ещё одного двигателя. Автор решил использовать для выработки энергии закон Архимеда. Закон состоит в том, что тела, плотность которых меньше плотности воды, стремятся всплыть на поверхность. Поэтому автор расположил на цепи полые баки и правую половину поместил под воду.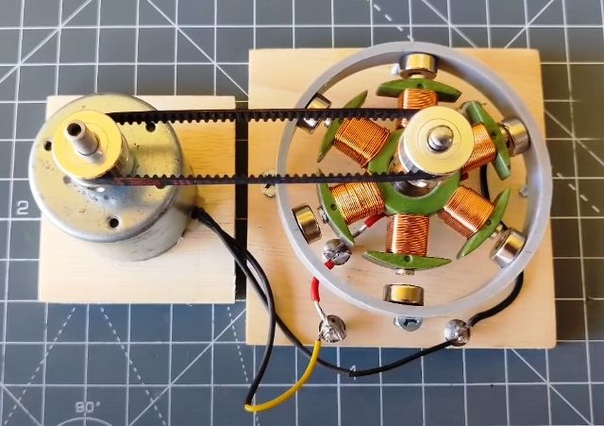 Он полагал, что вода будет их выталкивать на поверхность, а цепь с колёсами, таким образом, бесконечно вращаться.
Он полагал, что вода будет их выталкивать на поверхность, а цепь с колёсами, таким образом, бесконечно вращаться.
Здесь не учтено следующее: выталкивающая сила — это разница между давлениями воды, действующими на нижнюю и верхнюю части погруженного в воду предмета. В конструкции, приведённой на рисунке, эта разница будет стремиться вытолкнуть те баки, которые находятся под водой в правой части рисунка. Но на самый нижний бак, который затыкает собой отверстие, будет действовать лишь сила давления на его правую поверхность. И она будет превышать суммарную силу, действующую на остальные баки. Поэтому вся система просто прокрутится по часовой стрелке, пока не выльется вода.
Патенты и авторские свидетельства на вечный двигатель
В 1775 году Парижская академия наук приняла решения не рассматривать заявки на патентование вечного двигателя из-за очевидной невозможности их создания.
В Российской Федерации заявки на патентование вечного двигателя не рассматриваются, хотя Андрею Мельниченко они были выданы: Сайт Роспатента login: guest password: guest
Заявки на патент:
№ 2006142180 (2008.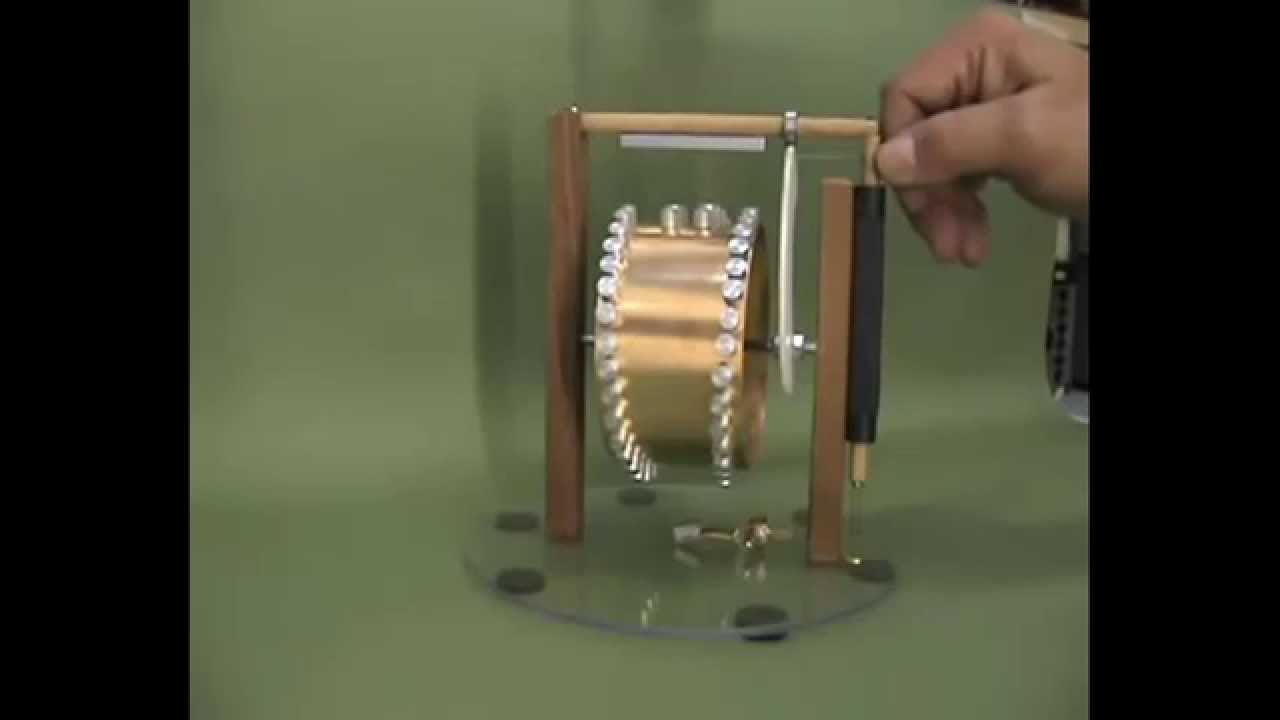 06.10) СПОСОБ И УСТРОЙСТВО ГЕНЕРАЦИИ ЭЛЕКТРОЭНЕРГИИ ЗА СЧЕТ ЭНЕРГИИ МАГНИТНОГО ПОЛЯ ФЕРРОМАГНЕТИКОВ (Заявки на российские изобретения (рус.))
06.10) СПОСОБ И УСТРОЙСТВО ГЕНЕРАЦИИ ЭЛЕКТРОЭНЕРГИИ ЗА СЧЕТ ЭНЕРГИИ МАГНИТНОГО ПОЛЯ ФЕРРОМАГНЕТИКОВ (Заявки на российские изобретения (рус.))
№ 2005138780 (2007.07.20) СПОСОБ И УСТРОЙСТВО ГЕНЕРАЦИИ ЭЛЕКТРОЭНЕРГИИ ЗА СЧЕТ ЭНЕРГИИ МАГНИТНОГО ПОЛЯ ФЕРРОМАГНЕТИКОВ (Заявки на российские изобретения (рус.))
№ 2005128940 (2007.03.27) СПОСОБ И УСТРОЙСТВА ДЛЯ УСИЛЕНИЯ РАДИОСИГНАЛОВ ПРИ РЕЗОНАНСНОЙ ИНТЕРФЕРЕНЦИИ ЭЛЕКТРОМАГНИТНЫХ ВОЛН (Заявки на российские изобретения (рус.))
№ 2005100451 (2006.06.20) СПОСОБ И УСТРОЙСТВА ДЛЯ ГЕНЕРАЦИИ ЭЛЕКТРОЭНЕРГИИ ИЗ МАГНИТНОГО ПОЛЯ ФЕРРОМАГНЕТИКОВ (Заявки на российские изобретения (рус.))
Известные изобретатели вечных двигателей
Литература
- Вознесенский Н. Н. О машинах вечного движения. М., 1926.
- Ихак-Рубинер Ф. Вечный двигатель. М., 1922.
- Кирпичёв В. Л. Беседы по механике. М.: ГИТЛ, 1951.
- Мах Э. Принцип сохранения работы: История и корень его. СПб., 1909.
- Михал С. Вечный двигатель вчера и сегодня. М.: Мир, 1984.
- Орд-Хьюм А. Вечное движение. История одной навязчивой идеи. М.: Знание, 1980.
- Перельман Я. И. Занимательная физика. Кн. 1 и 2. М.: Наука, 1979.
- Петрунин Ю. Почему идея вечного двигателя не существовала в античности? // Петрунин Ю.Ю. Призрак Царьграда: неразрешимые задачи в русской и европейской культуре. – М.: КДУ, 2006, с. 75-82
Примечания
- ↑ ВЕЧНЫЙ ДВИГАТЕЛЬ Наиболее ранние сведения о вечных двигателях
Wikimedia Foundation. 2010.
Электродвигатель – Атлас Копко Россия
Поиск по вики-сайту о сжатом воздухе
Чтобы преобразовать воздух в сжатый воздух, нужна энергия. Эта энергия поступает в виде электричества, генерируемого электродвигателем. Наиболее распространенным электродвигателем является трехфазный асинхронный двигатель с короткозамкнутым ротором. Этот тип двигателя используется во всех видах промышленности. Он является бесшумным и надежным, благодаря чему входит в состав большинства систем, включая компрессоры.
Наиболее распространенным электродвигателем является трехфазный асинхронный двигатель с короткозамкнутым ротором. Этот тип двигателя используется во всех видах промышленности. Он является бесшумным и надежным, благодаря чему входит в состав большинства систем, включая компрессоры.
Какие основные компоненты у электродвигателя?
Электродвигатель состоит из двух основных компонентов: неподвижного статора и вращающегося ротора. Статор создает вращающееся магнитное поле, а ротор преобразует эту энергию в движение, т. е. механическую энергию. Статор подключен к трехфазной сети. Ток в обмотках статора создает вращающееся магнитное силовое поле, которое индуцирует токи в роторе, а также создает там магнитное поле. Взаимодействие между магнитными полями статора и ротора создает крутящий момент, который, в свою очередь, вращает вал ротора.
Частота вращения
Если вал асинхронного двигателя вращается с той же частотой, что и магнитное поле, то индуцированный ток в роторе будет равен нулю. Однако из-за различных потерь, например, в подшипниках, такое состояние невозможно, и частота всегда ниже на 1-5%, чем синхронная частота магнитного поля (называется «скольжением»). (Двигатели с постоянными магнитами вообще не создают скольжения).
Эффективность
Преобразование энергии в двигателе невозможно без потерь. Эти потери являются результатом, помимо прочего, резистивных потерь, вентиляционных потерь, потерь намагниченности и потерь на трение.
Класс изоляции
Материал изоляции в обмотке двигателя разделен на классы изоляции в соответствии с IEC 60085, стандартом, опубликованным Международной электротехнической комиссией. Каждый класс обозначается буквой, соответствующей температуре, которая является верхним пределом для области применения изоляции. Если верхний предел превышен на 10 °C в течение продолжительного периода времени, то срок службы изоляции сокращается примерно наполовину.
Каждый класс обозначается буквой, соответствующей температуре, которая является верхним пределом для области применения изоляции. Если верхний предел превышен на 10 °C в течение продолжительного периода времени, то срок службы изоляции сокращается примерно наполовину.
Класс изоляции | B | Ф | H |
Максимальная температура обмотки, °С | 130 | 155 | 180 |
Температура окружающей среды, °C | 40 | 40 | 40 |
Повышение температуры, °C | 80 | 105 | 125 |
Запас по тепловыделению, °C | 10 | 10 | 15 |
Классы защиты
Классы защиты, согласно IEC 60034-5, определяют, насколько двигатель защищен от контакта и воды. Они указаны в виде букв IP и двух цифр. Первая цифра обозначает защиту от контакта и проникновения твердого предмета. Вторая цифра указывает на защиту от воды.
Они указаны в виде букв IP и двух цифр. Первая цифра обозначает защиту от контакта и проникновения твердого предмета. Вторая цифра указывает на защиту от воды.
Например, IP23 означает: (2) защиту от твердых объектов размером более 12 мм, (3) защиту от прямых струй воды под углом до 60° от вертикали. IP 54: (5) защита от пыли, (4) защита от воды, распыленной со всех сторон. IP 55: (5) защита от пыли, (5) защита от струй воды низкого давления со всех сторон.
Методы охлаждения
Методы охлаждения в соответствии с IEC 60034-6 определяют порядок охлаждения двигателя. Они обозначаются буквой IC, за которой следует серия цифр, представляющих тип охлаждения (невентилируемый, самовентилируемый, принудительное охлаждение) и режим охлаждения (внутреннее охлаждение, поверхностное охлаждение, охлаждение по замкнутой схеме, жидкостное охлаждение и т. д.).
д.).
Способ установки
Способ установки в соответствии с IEC 60034-7 определяет порядок установки двигателя. Он обозначается буквами IM и четырьмя цифрами. Например, IM 1001 означает: два подшипника, вал со свободными концами и корпус статора с ножками. IM 3001: два подшипника, вал со свободным концом, корпус статора без ножек и большой фланец с простыми фиксирующими отверстиями.
Способ установки в соответствии с IEC 60034-7 определяет порядок установки двигателя. Он обозначается буквами IM и четырьмя цифрами. Например, IM 1001 означает: два подшипника, вал со свободными концами и корпус статора с ножками. IM 3001: два подшипника, вал со свободным концом, корпус статора без ножек и большой фланец с простыми фиксирующими отверстиями.
Что такое соединения по схеме звезды и треугольника?
Трехфазный электродвигатель может быть подключен двумя способами: звездой (Y) или треугольником (Δ). Фазы обмотки в трехфазном двигателе обозначены U, V и W (U1-U2; V1-V2; W1-W2). Стандарты в Соединенных Штатах используют обозначения T1, T2, T3, T4, T5, T6. В случае соединения звездой (Y) «концы» фаз обмотки двигателя соединяются вместе, образуя нулевую точку в виде звезды (Y).
Фазное напряжение (фазное напряжение = напряжение сети/√3, например 400 В = 690/√3) будет приложено к обмоткам. Ток Ih в направлении нулевой точки становится фазным током, и, соответственно, через обмотки будет протекать фазный ток If = Ih. В случае схемы треугольника (Δ) выполняется соединение начала и конца разных фаз, которые образуют треугольник (Δ).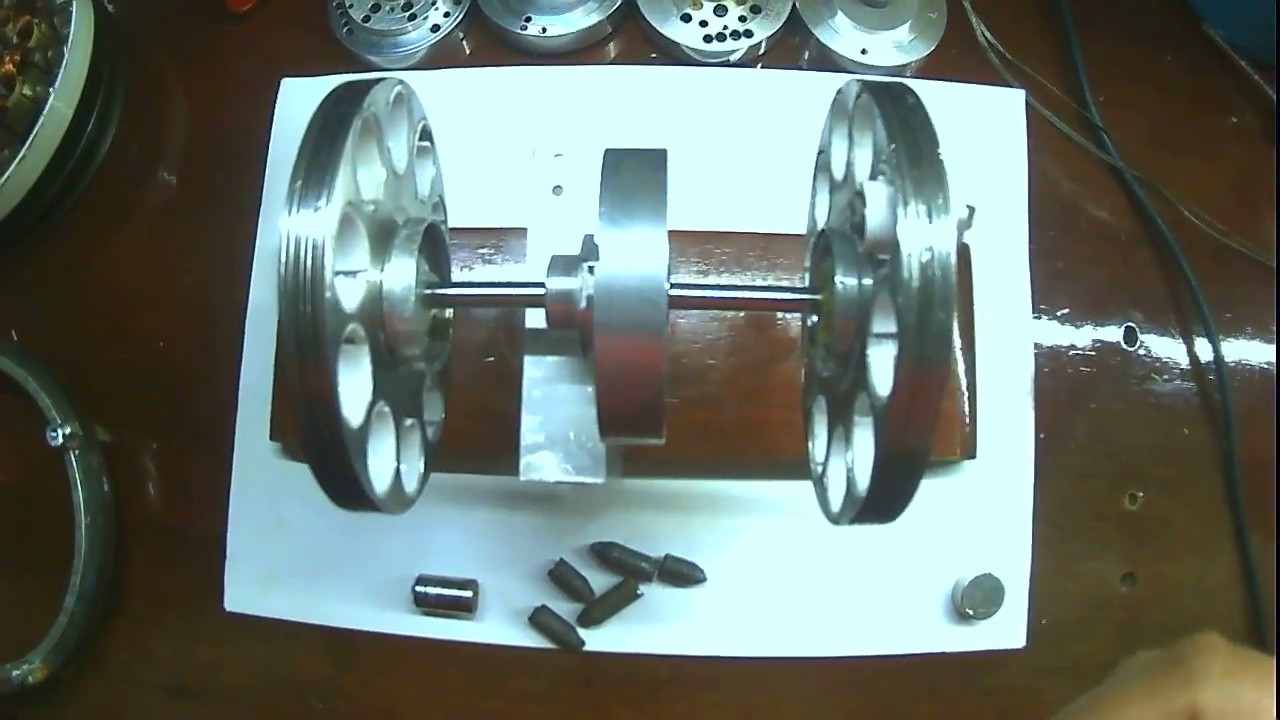 В результате, на обмотках появляется напряжение сети. Ток Ih в двигателе является током сети, и он будет разделен между обмотками, чтобы обеспечить протекание через них фазового тока, Ih/√3 = If.
В результате, на обмотках появляется напряжение сети. Ток Ih в двигателе является током сети, и он будет разделен между обмотками, чтобы обеспечить протекание через них фазового тока, Ih/√3 = If.
Один и тот же двигатель может быть включен на 690 В по схеме звезды или на 400 В по схеме треугольника. В обоих случаях напряжение на обмотках будет составлять 400 В. Ток в двигателе будет ниже при соединении со звездой на 690 В, чем при соединении треугольником на 400 В. Соотношение между уровнями тока равно √3. Например, на табличке двигателя может быть указано 690/400 В. Это означает, что соединение звездой предназначено для более высокого напряжения, а соединение треугольником – для более низкого. Более низкое значение тока, которое также может быть указано на пластине, соответствует соединению по схеме звезды, а более высокое – соединению по схеме треугольника.
Что такое крутящий момент?
Крутящий момент электродвигателя отражает вращательную способность ротора. Каждый двигатель характеризуется определенным максимальным крутящим моментом. Приложение нагрузки выше этого крутящего момента означает, что двигатель не сможет вращаться. При нормальной нагрузке двигатель работает на уровне значительно ниже своего максимального крутящего момента, однако последовательность пуска предусматривает дополнительную нагрузку. Характеристики двигателя обычно представлены в виде кривой крутящего момента.
Каждый двигатель характеризуется определенным максимальным крутящим моментом. Приложение нагрузки выше этого крутящего момента означает, что двигатель не сможет вращаться. При нормальной нагрузке двигатель работает на уровне значительно ниже своего максимального крутящего момента, однако последовательность пуска предусматривает дополнительную нагрузку. Характеристики двигателя обычно представлены в виде кривой крутящего момента.
Другие статьи по этой теме
Электромонтаж компрессорных систем
В этой статье мы рассмотрим электрическую систему, которая обеспечивает работу компрессора. В нее входят электродвигатели, кабели, системы управления напряжением и защиты от короткого замыкания.
В нее входят электродвигатели, кабели, системы управления напряжением и защиты от короткого замыкания.
Электроэнергия
Электричество играет большую роль в процессе сжатия воздуха. Узнайте больше об электроэнергии и взаимосвязи между активной, реактивной и полной мощностью.
Магнитные двигатели. Виды и устройство. Применение и работа
Магнитные двигатели (двигатели на постоянных магнитах) являются наиболее вероятной моделью «вечного двигателя». Еще в давние времена была высказана эта идея, но так никто его не создал. Многие устройства дают ученым возможность приблизиться к изобретению такого двигателя. Конструкции подобных устройств еще не доведены до практического результата. С этими устройствами связано много различных мифов.
Многие устройства дают ученым возможность приблизиться к изобретению такого двигателя. Конструкции подобных устройств еще не доведены до практического результата. С этими устройствами связано много различных мифов.
Магнитные двигатели не расходуют энергию, являются агрегатом необычного типа. Силой, двигающей мотор, является свойство магнитных элементов. Электродвигатели также применяют магнитные свойства ферромагнетиков, но магниты приводятся в движение электрическим током. А это является противоречием основному принципиальному действию вечного двигателя. В двигателе на магнитах используется магнитное влияние на объекты. Под действием этих объектов начинается движение. Небольшими моделями таких двигателей стали аксессуары в офисах. На них двигаются постоянно шарики, плоскости. Но там для работы применены батарейки.
Ученый Тесла занимался серьезно проблемой образования магнитного двигателя. Его модель была выполнена из катушки, турбины, проводов для соединения объектов. В обмотку закладывался маленький магнит, захватывающий два витка катушки. Турбине давали небольшой толчок, раскручивали ее. Она начинала движение с большой скоростью. Такое движение называлось вечным. Двигатель Тесла на магнитах стал идеальной моделью вечного двигателя. Его недостатком стала необходимость начального задания скорости турбине.
Турбине давали небольшой толчок, раскручивали ее. Она начинала движение с большой скоростью. Такое движение называлось вечным. Двигатель Тесла на магнитах стал идеальной моделью вечного двигателя. Его недостатком стала необходимость начального задания скорости турбине.
По закону сохранения электропривод не может содержать более 100% КПД, энергия частично тратится на трение в двигателе. Такой вопрос должен решать магнитный двигатель, у которого постоянные магниты (роторный тип, линейный, униполярный). В нем осуществление механического движения элементов идет от взаимодействия магнитных сил.
Принцип работы
Многие инновационные магнитные двигатели применяют работу трансформации тока во вращение ротора, являющееся механическим движением. Вместе с ротором вращается вал привода. Это дает возможность утверждать, что всякий расчет не даст результата КПД равного 100%. Агрегат не получается автономным, он имеет зависимость. Такой же процесс можно увидеть в генераторе. В нем крутящий момент, который образуется от энергии движения, создает выработку электроэнергии на пластинах коллектора.

1 — Линия раздела магнитных силовых линий, замыкающихся через отверстие и внешнюю кромку кольцевого магнита
2 — Катящийся ротор (Шарик от подшипника)
3 — Немагнитное основание (Статор)
4 — Кольцевой постоянный магнит от громкоговорителя (Динамика)
5 — Плоские постоянные магниты (Защелки)
6 — Немагнитный корпус
Магнитные двигатели применяют другой подход. Необходимость в дополнительных источниках питания сводится к минимуму. Принцип работы легко объяснить «беличьим колесом». Для производства демонстративной модели не нужны специальные чертежи или прочностной расчет. Нужно взять постоянный магнит, чтобы его полюса находились на обеих плоскостях. Магнит будет главной конструкцией. К ней добавляется два барьера в виде колец (внешний и внутренний) из немагнитных материалов. Между кольцами располагают стальной шарик. В магнитном двигателе он станет ротором. Силами магнита шарик притянется к диску противоположным полюсом. Этот полюс не будет менять свое положение при движении.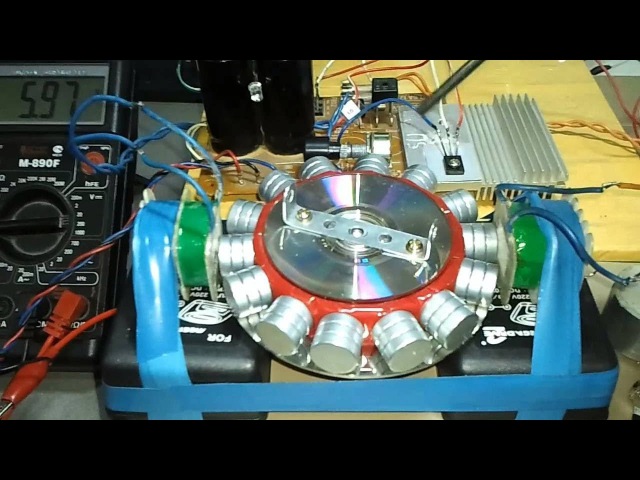
Статор включает в себя пластину, изготовленную из экранируемого материала. На нее по траектории кольца закрепляют постоянные магниты. Полюса магнитов находятся перпендикулярно в виде диска и ротора. В итоге, при приближении статора к ротору на некоторое расстояние, появляется отталкивание и притяжение в магнитах поочередно. Оно создает момент, переходит во вращательное движение шарика по траектории кольца. Запуск и торможение осуществляется движением статора с магнитами. Такой метод магнитного двигателя действует, пока магнитные свойства магнитов будут сохраняться. Расчет делается относительно статора, шариков, управляющей цепи.
На таком же принципе работают действующие магнитные двигатели. Самыми известными стали магнитные двигатели на тяге магнитов Тесла, Лазарева, Перендева, Джонсона, Минато. Так же известны двигатели на постоянных магнитах: цилиндровые, роторные, линейные, униполярные и т.д. У каждого двигателя своя технология изготовления, основанная на магнитных полях, образующихся вокруг магнитов. Вечных двигателей не бывает, так как постоянные магниты утрачивают свои свойства через несколько сотен лет.
Вечных двигателей не бывает, так как постоянные магниты утрачивают свои свойства через несколько сотен лет.
Ученый исследователь Тесла стал одним из первых, кто изучал вопросы вечного двигателя. В науке его изобретение называется униполярным генератором. Сначала расчет такого устройства сделал Фарадей. Его образец не произвел стабильности работы и должного эффекта, не достиг необходимой цели, хотя принцип действия был сходным. Название «униполярный» дает понять, что по схеме модели проводник находится в цепи полюсов магнита.
По схеме, обнаруженной в патенте, видна конструкция из 2-х валов. На них помещены 2 пары магнитов. Они образуют отрицательное и положительное поля. Между магнитами находятся униполярные диски с бортами, которые применяются как образующие проводники. Два диска друг с другом имеют связь тонкой лентой из металла. Лента может использоваться для вращения диска.
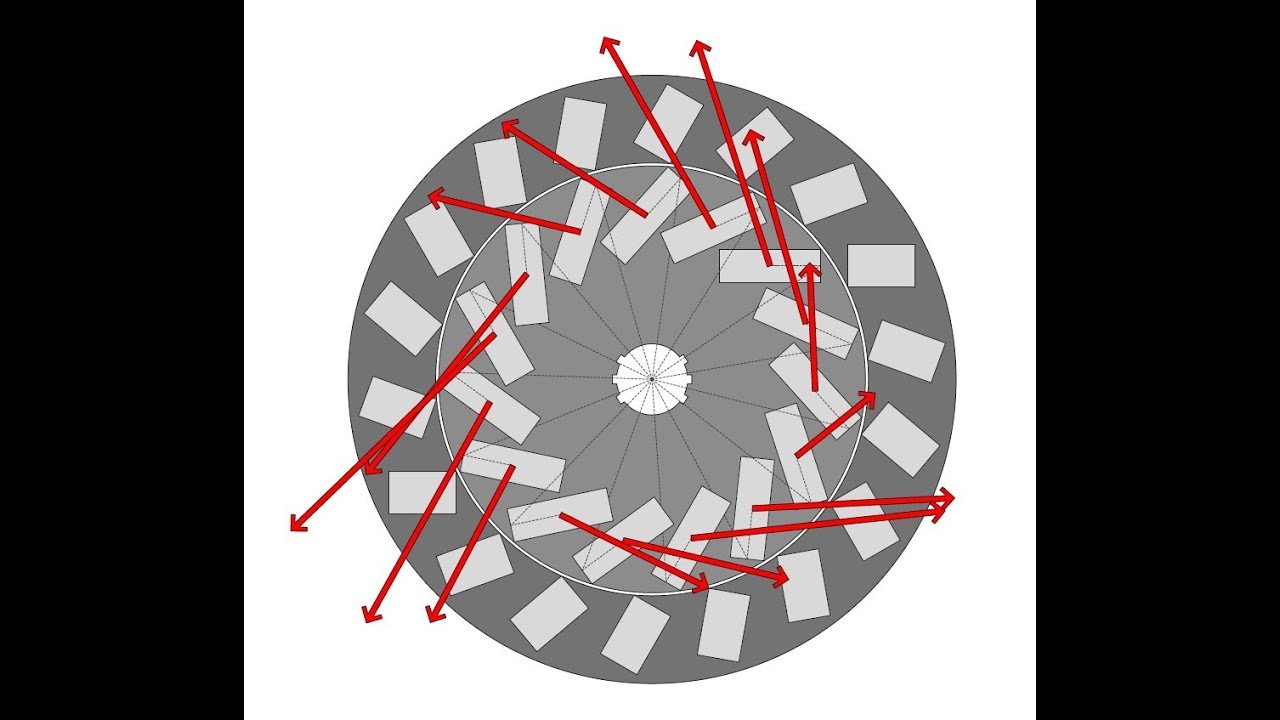
Двигатель МинатоЭтот тип двигателя также использует магнетическую энергию для самостоятельного движения и самовозбуждения.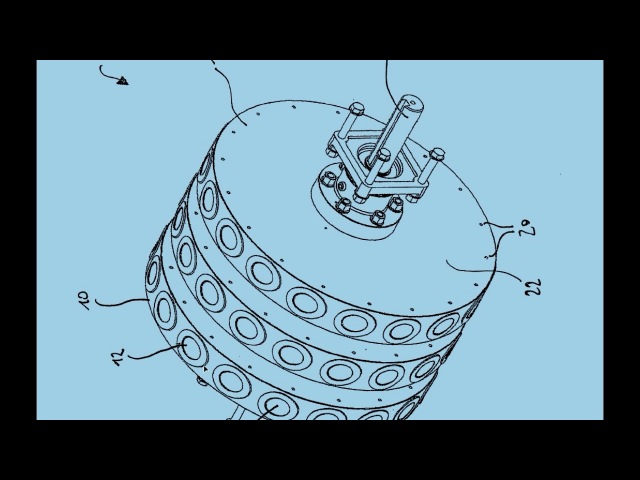 Образец двигателя разработан японским изобретателем Минато более 30 лет назад. Двигатель обладает высокой эффективностью, характеризуется бесшумной работой. Минато утверждал, что магнитный самовращающийся двигатель такого исполнения выдает КПД более 300%.
Образец двигателя разработан японским изобретателем Минато более 30 лет назад. Двигатель обладает высокой эффективностью, характеризуется бесшумной работой. Минато утверждал, что магнитный самовращающийся двигатель такого исполнения выдает КПД более 300%.
Ротор изготовлен в форме колеса или дискового элемента. На нем находятся магниты, расположенные под определенным углом. Во время приближения статора с мощным магнитом создается момент вращения, диск Минато вращается, применяет отторжение и сближение полюсов. Скорость вращения и крутящий момент мотора зависит от расстояния между ротором и статором. Напряжение мотора подается по цепи реле прерывателя.
Для предохранения от биения и импульсных движений при вращении диска применяют стабилизаторы, оптимизируют расход энергии управляющего электрического магнита. Негативной стороной можно назвать то, что нет данных по свойствам нагрузки, тяге, которые применяются реле управления. Также периодически необходимо производить намагничивание. Об этом Минато в своих расчетах не упоминал.
Об этом Минато в своих расчетах не упоминал.
Русский разработчик Лазарев сконструировал действующую простую модель двигателя, применяющего магнитную тягу. Роторный кольцар включает в себя резервуар с пористой перегородкой на две части. Эти половины между собой сообщаются трубкой. По этой трубке поступает поток жидкости из нижней камеры в верхнюю. Поры создают перетекание вниз за счет гравитации.
При расположении колеса с расположенными на лопастях магнитами под напором жидкости возникает постоянное магнитное поле, двигатель вращается. Схема двигателя Лазарева роторного типа применяется при разработке простых устройств с самовращением.
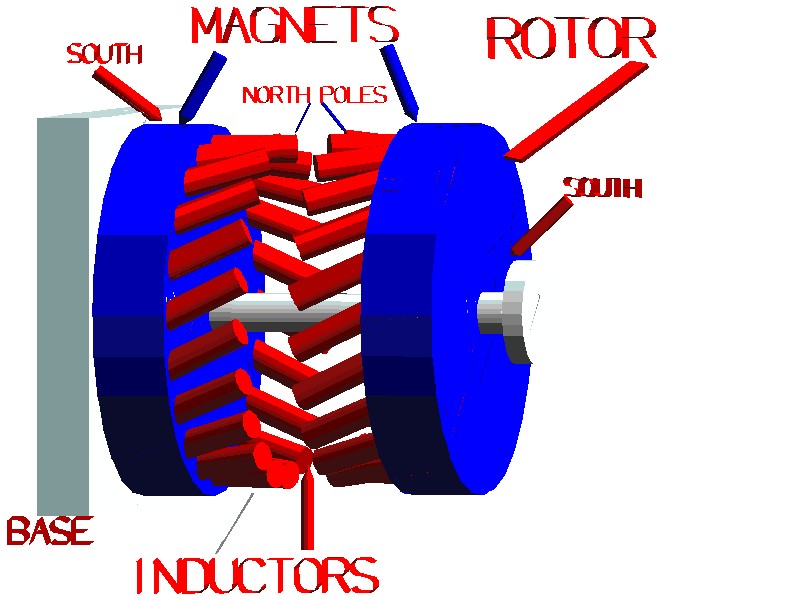
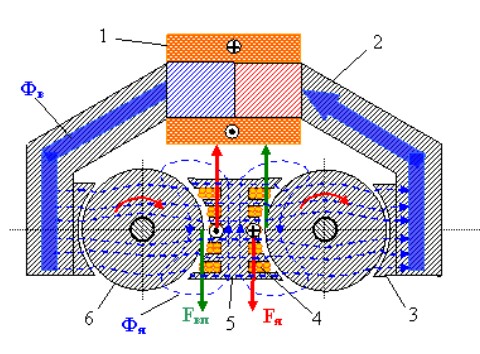
Двигатель ДжонсонаДжонсон в своем изобретении применял энергию, которая генерируется потоком электронов. Эти электроны находятся в магнитах, образуют цепь питания двигателя. Статор двигателя соединяет в себе множество магнитов. Они располагаются в виде дорожки. Движение магнитов и их расположение зависит от конструкции агрегата Джонсона. Компоновка может быть роторной или линейной.
Компоновка может быть роторной или линейной.
1 — Магниты якоря
2 — Форма якоря
3 — Полюса магнитов статора
4 — Кольцевая канавка
5 — Статор
6 — Резьбовое отверстие
7 — Вал
8 — Кольцевая втулка
9 — Основание
Магниты прикрепляются к особой пластине, обладающей большой магнитной проницаемостью. Одинаковые полюса магнитов статора поворачиваются в сторону ротора. Этот поворот создает отторжение и притяжение полюсов по очереди. Совместно с ними смещаются элементы ротора и статора между собой.
Джонсон организовал расчет воздушного промежутка между ротором и статором. Он дает возможность коррекции усилия и магнитной совокупности взаимодействия в направлении увеличения или снижения.
Магнитный двигатель ПерендеваДвигатель самовращающейся модели Перендева так же является примером применения работы магнитных сил. Создатель этого мотора Брэди оформил патент и создал фирму еще до начала уголовного дела на него, организовал работу на поточной основе.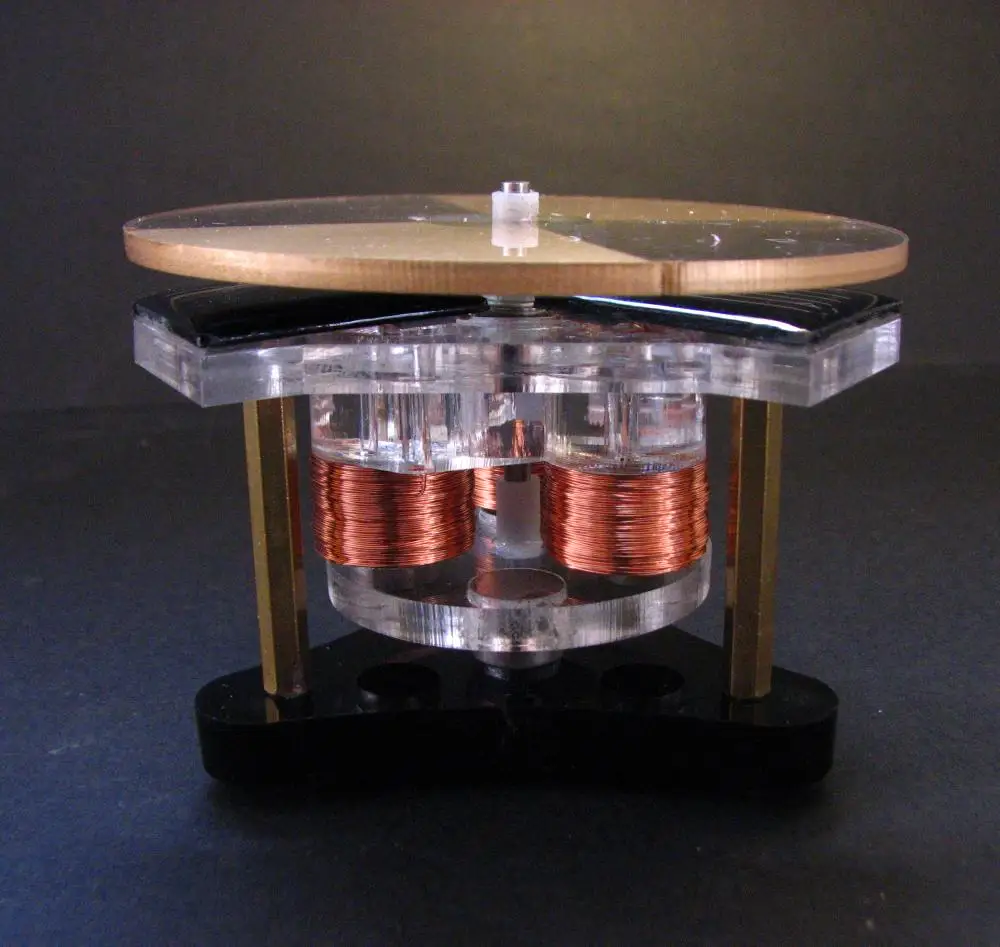
При анализе принципа работы, схемы, чертежей в патенте можно понять, что статор и ротор выполнены в форме внешнего кольца и диска. На них по траектории кольца располагают магниты. При этом соблюдают угол, определенный по центральной оси. Из-за взаимного действия поля магнитов образуется момент вращения, осуществляется их перемещение друг относительно друга. Цепь магнитов рассчитывается путем выяснения угла расхождения.
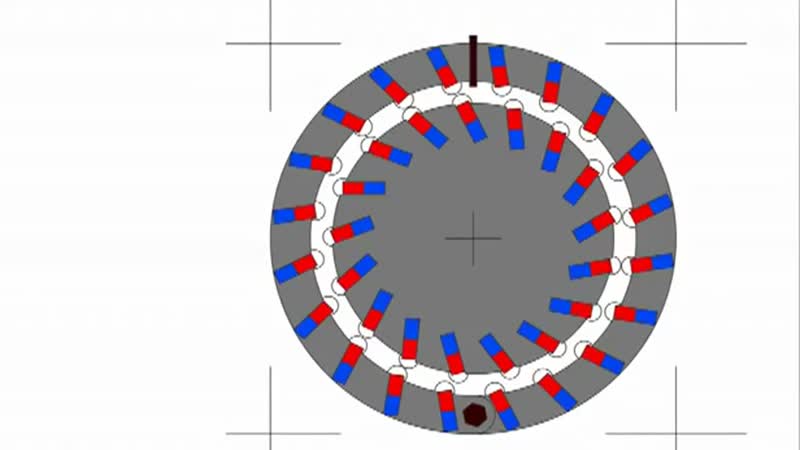
Синхронные магнитные двигателиГлавным видом электрических двигателей является синхронный вид. У него обороты вращения ротора и статора одинаковые. У простого электромагнитного двигателя эти две части имеют в составе обмотки на пластинах. Если изменить конструкцию якоря, вместо обмотки установить постоянные магниты, то получится оригинальная эффективная рабочая модель двигателя синхронного типа.
1 — Стержневая обмотка
2 — Секции сердечника ротора
3 — Опора подшипника
4 — Магниты
5 — Стальная пластина
6 — Ступица ротора
7 — Сердечник статора
Статор сделан по привычной конструкции магнитопровода из катушек и пластин. В них образуется магнитное поле вращения от электрического тока. Ротор образует постоянное поле, взаимодействующее с предыдущим, и образует момент вращения.
В них образуется магнитное поле вращения от электрического тока. Ротор образует постоянное поле, взаимодействующее с предыдущим, и образует момент вращения.
Нельзя забывать о том, что относительное нахождение якоря и статора имею возможность изменяться в зависимости от схемы двигателя. Например, якорь может быть сделан в форме наружной оболочки. Для запуска двигателя от сети питания применяется схема из магнитного пускателя и реле тепловой защиты.
Похожие темы:
Вечный двигатель на магнитах — блог Мира Магнитов
Со времен обнаружения магнетизма идея создать вечный двигатель на магнитах не покидает самые светлые умы человечества. До сих пор так и не удалось создать механизм с коэффициентом полезного действия больше единицы, для стабильной работы которого не требовалось бы внешнего источника энергии. На самом деле концепция вечного двигателя в современном виде вовсе и не требует нарушения основных постулатов физики. Главная задача изобретателей состоит в том, чтобы максимально приблизится к стопроцентному КПД и обеспечить продолжительную работу устройства при минимальных затратах.
Реальные перспективы создания вечного двигателя на магнитах
Противники теории создания вечного двигателя говорят о невозможности нарушения закона о сохранении энергии. Действительно, нет совершенно никаких предпосылок к тому, чтобы получить энергию из ничего. С другой стороны, магнитное поле – это вовсе не пустота, а особый вид материи, плотность которого может достигать 280 кДж/м³. Именно это значение и является потенциальной энергией, которую теоретически может использовать вечный двигатель на постоянных магнитах. Несмотря на отсутствие готовых образцов в общем доступе, о возможности существования подобных устройств говорят многочисленные патенты, а также факт наличия перспективных разработок, которые остаются засекреченными еще с советских времен.Норвежский художник Рейдар Финсруд создал свой вариант вечного двигателя на магнитах
К созданию подобных электрогенераторов приложили силы знаменитые физики-ученые: Никола Тесла, Минато, Василий Шкондин, Говард Джонсон и Николай Лазарев.
 Следует сразу оговориться, что создаваемые с помощью магнитов двигатели называются «вечными» условно — магнит теряет свои свойства через пару сотен лет, а вместе с ним прекратит работу и генератор.
Следует сразу оговориться, что создаваемые с помощью магнитов двигатели называются «вечными» условно — магнит теряет свои свойства через пару сотен лет, а вместе с ним прекратит работу и генератор. Самые известные аналоги вечного двигателя магнитах
Многочисленные энтузиасты стараются создать вечный двигатель на магнитах своими руками по схеме, в которой вращательное движение обеспечивается взаимодействием магнитных полей. Как известно, одноименные полюса отталкиваются друг от друга. Именно этот эффект и лежит в основе практически всех подобных разработок. Грамотное использование энергии отталкивания одинаковых полюсов магнита и притяжения разноименных полюсов в замкнутом контуре позволяет обеспечить длительное безостановочное вращение установки без приложения внешней силы.Антигравитационный магнитный двигатель Лоренца
Двигатель Лоренца можно сделать самостоятельно с использованием простых материалов
Если вы хотите собрать вечный двигатель на магнитах своими руками, то обратите внимание на разработки Лоренца. Антигравитационный магнитный двигатель его авторства считается наиболее простым в реализации. В основе этого устройства лежит использование двух дисков с разными зарядами. Их наполовину помещают в полусферический магнитный экран из сверхпроводника, который полностью выталкивает из себя магнитные поля. Такое устройство необходимо для изоляции половин дисков от внешнего магнитного поля. Запуск этого двигателя выполняется путем принудительного вращения дисков навстречу друг другу. По сути, диски в получившейся система являются парой полувитков с током, на открытые части которых будут воздействовать силы Лоренца.
Антигравитационный магнитный двигатель его авторства считается наиболее простым в реализации. В основе этого устройства лежит использование двух дисков с разными зарядами. Их наполовину помещают в полусферический магнитный экран из сверхпроводника, который полностью выталкивает из себя магнитные поля. Такое устройство необходимо для изоляции половин дисков от внешнего магнитного поля. Запуск этого двигателя выполняется путем принудительного вращения дисков навстречу друг другу. По сути, диски в получившейся система являются парой полувитков с током, на открытые части которых будут воздействовать силы Лоренца.
Асинхронный магнитный двигатель Николы Тесла
Асинхронный “вечный” двигатель на постоянных магнитах, созданный Никола Тесла, вырабатывает электричество за счет постоянно вращающегося магнитного поля. Конструкция довольно сложная и трудно воспроизводимая в домашних условиях.
Вечный двигатель на постоянных магнитах Николы Тесла
«Тестатика» Пауля Баумана
Одна из самых известных разработок – это «тестатика» Баумана.
 Устройство напоминает своей конструкцией простейшую электростатическую машину с лейденскими банками. «Тестатик» состоит из пары акриловых дисков (для первых экспериментов использовались обычные музыкальные пластинки), на которые наклеены 36 узких и тонких полосок алюминия.
Устройство напоминает своей конструкцией простейшую электростатическую машину с лейденскими банками. «Тестатик» состоит из пары акриловых дисков (для первых экспериментов использовались обычные музыкальные пластинки), на которые наклеены 36 узких и тонких полосок алюминия. Кадр из документального фильма: к Тестатике подключили 1000-ваттную лампу. Слева – изобретатель Пауль Бауман
После того, как диски толкали пальцами в противоположные стороны, запущенный двигатель продолжал работать неограниченно долгое время со стабильной скоростью вращения дисков на уровне 50-70 оборотов в минуту. В электроцепи генератора Пауля Баумана удается развить напряжение до 350 вольт с силой тока до 30 Ампер. Из-за небольшой механической мощности это скорее не вечный двигатель, а генератор на магнитах.
Вакуумный триодный усилитель Свита Флойда
Сложность воспроизведения устройства Свита Флойда заключается не в его конструкции, а в технологии изготовления магнитов. В основе этого двигателя используются два ферритовых магнита с габаритами 10х15х2,5 см, а также катушки без сердечников, из которых одна является рабочей с несколькими сотнями витков, а еще две – возбуждающие. Для запуска триодного усилителя необходима простая карманная батарейка 9В. После включения устройство может работать очень долго, самостоятельно питая себя по аналогии с автогенератором. По утверждениям Свита Флойда, от работающей установки удалось получить выходное напряжение в 120 вольт с частотой 60 Гц, мощность которого достигала 1 кВт.
В основе этого двигателя используются два ферритовых магнита с габаритами 10х15х2,5 см, а также катушки без сердечников, из которых одна является рабочей с несколькими сотнями витков, а еще две – возбуждающие. Для запуска триодного усилителя необходима простая карманная батарейка 9В. После включения устройство может работать очень долго, самостоятельно питая себя по аналогии с автогенератором. По утверждениям Свита Флойда, от работающей установки удалось получить выходное напряжение в 120 вольт с частотой 60 Гц, мощность которого достигала 1 кВт.
Роторный кольцар Лазарева
Большой популярностью пользуется схема вечного двигателя на магнитах на основе проекта Лазарева. На сегодняшний день его роторный кольцар считается устройством, реализация которая максимально близка к концепции вечного двигателя. Важное преимущество разработки Лазарева состоит в том, что даже без профильных знаний и серьезный затрат можно собрать подобный вечный двигатель на неодимовых магнитах своими руками. Такое устройство представляет собой емкость, разделенную пористой перегородкой на две части. Автор разработки использовал в качестве перегородки специальный керамический диск. В него устанавливается трубка, а в емкость заливается жидкость. Для этого оптимально подходят улетучивающиеся растворы (например, бензин), но можно использовать и простую водопроводную воду.
Такое устройство представляет собой емкость, разделенную пористой перегородкой на две части. Автор разработки использовал в качестве перегородки специальный керамический диск. В него устанавливается трубка, а в емкость заливается жидкость. Для этого оптимально подходят улетучивающиеся растворы (например, бензин), но можно использовать и простую водопроводную воду.
Механизм работы двигателя Лазарева очень просто. Сначала жидкость подается через перегородку вниз емкости. Под давлением раствор начинает подниматься по трубке. Под получившейся капельницей размещают колесо с лопастями, на которых устанавливают магниты. Под силой падающих капель колесо вращается, образуя постоянное магнитное поле. На основе этой разработки успешно создан самовращающийся магнитный электродвигатель, на которой зарегистрировало патент одно отечественное предприятие.
Мотор-колесо Шкондина
Если вы ищете интересные варианты, как сделать вечный двигатель из магнитов, то обязательно обратите внимание на разработку Шкондина. Конструкцию его линейного двигателя можно охарактеризовать как «колесо в колесе». Это простое, но в то же время производительное устройство успешно используется для велосипедов, скутеров и другого транспорта. Импульсно-инерционное мотор-колесо представляет собой объединение магнитных дорожек, параметры которых динамично изменяются путем переключения обмоток электромагнитов.
Конструкцию его линейного двигателя можно охарактеризовать как «колесо в колесе». Это простое, но в то же время производительное устройство успешно используется для велосипедов, скутеров и другого транспорта. Импульсно-инерционное мотор-колесо представляет собой объединение магнитных дорожек, параметры которых динамично изменяются путем переключения обмоток электромагнитов. Общая схема линейного двигателя Василия Шкондина

Неодимовый магнит в вечном двигателе на основе конструкции проекта Шкондина имеет ключевое значение. Когда электромагнит проходит через оси неодимовых магнитов, то образуется магнитный полюс, который является одноименным по отношению к преодоленному полюсу и противоположным по отношению к полюсу следующего магнита. Получается, что электромагнит всегда отталкивается от предыдущего магнита и притягивается к следующему. Такие воздействия и обеспечивают вращение обода. Обесточивание элетромагнита при достижении оси магнита на статоре обеспечивается размещением в этой точке токосъемника.
Житель г.Пущино Василий Шкондин изобрел не вечный двигатель, а высокоэффективные мотор-колёса для транспорта и генераторы электроэнергии.
Коэффициент полезного действия двигателя Шкондина составляет 83%. Конечно, это пока еще не полностью энергонезависимый вечный двигатель на неодимовых магнитах, но очень серьезный и убедительный шаг в правильном направлении. Благодаря особенностям конструкции устройства на холостом ходу удается вернуть часть энергии батареям (функция рекуперации).
Вечный двигатель Перендева
Альтернативный движок высокого качества, производящий энергию исключительно за счет магнитов. База — статичный и динамичный круги, на которых в задуманном порядке располагается несколько магнитов. Между ними возникает самооталкивающая сила, из-за которой и возникает вращение подвижного круга. Такой вечный двигатель считают очень выгодным в эксплуатации.
Вечный магнитный двигатель Перендева
Существует и множество других ЭМД, схожих по принципу действия и конструкции. Все они еще несовершенны, поскольку не способны долгое время функционировать без каких-либо внешних импульсов. Поэтому работа над созданием вечных генераторов не прекращается.
Как сделать вечный двигатель с помощью магнитов своими руками
Понадобится:- 3 вала
- Диск из люцита диаметром 4 дюйма
- 2 люцитовых диска диаметром 2 дюйма
- 12 магнитов
- Алюминиевый брусок
Валы прочно соединяются между собой. Причем один лежит горизонтально, а два другие расположены по краям. К центральному валу крепится большой диск. Остальные присоединяются к боковым. На дисках располагаются неодимовые магниты — 8 в середине и по 4 по бокам. Алюминиевый брусок служит основанием для конструкции. Он же обеспечивает и ускорение устройства.
Недостатки ЭМД
Планируя активно использовать подобные генераторы, следует соблюдать осторожность. Дело в том, что постоянная близость магнитного поля приводит к ухудшению самочувствия. К тому же для нормального функционирования устройства необходимо обеспечить ему специальные условия работы. Например, защитить от воздействия внешних факторов. Итоговая стоимость готовых конструкций получается высокой, а вырабатываемая энергия слишком мала. Поэтому и выгода от использования подобных конструкций сомнительна.Экспериментируйте и создавайте собственные версии вечного двигателя. Все варианты разработок вечных двигателей продолжают совершенствоваться энтузиастами, а в сети можно обнаружить множество примеров реально достигнутых успехов. Интернет-магазин «Мир Магнитов» предлагает вам выгодно купить неодимовые магниты и своими руками собрать различные устройства, в которых бы шестеренки безостановочно крутились благодаря воздействиям сил отталкивания и притяжения магнитных полей. Выбирайте в представленном каталоге изделия с подходящими характеристиками (размеры, форма, мощность) и оформляйте заказ.
Шаговые двигатели: описание, примеры, обзоры, характеристики
Шаговый электродвигатель это синхронный бесщёточный электродвигатель с несколькими обмотками. Ток, подаваемый в одну из обмоток статора, вызывает фиксацию ротора. Последовательная активация обмоток двигателя вызывает дискретные угловые перемещения ротора, они же шаги. Именно поэтому двигатель называется шаговым. Для управления шаговым двигателем используется специальный контроллер, который называют драйвером шагового двигателя.
Шаговые двигатели стандартизованы национальной ассоциацией производителей электрооборудования NEMA по посадочным размерам и размеру фланца. Самые ходовые типоразмеры это NEMA 17 с фланцем 42*42мм, NEMA 23 с фланцем 57*57мм и NEMA 34 размером 86*86мм соответственно. Шаговые электродвигатели NEMA 17 могут создавать крутящий момент приблизительно до 6 кг*см, NEMA 23 до 30 кг*см и NEMA 34 до 120 кг*см.
Как устроен шаговый двигатель
Конструктивно шаговые двигатели можно поделить на три больших класса – это двигатели с переменным магнитным сопротивлением, двигатели с постоянными магнитами и гибридный класс, сочетающий характеристики первых двух.
Шаговые двигатели с переменным магнитным сопротивлением имеют несколько полюсов на статоре и ротор из магнитомягкого материала, который не сохраняет остаточную намагниченность. Для простоты ротор на рисунке имеет 4 зубца, а статор имеет 6 полюсов. Двигатель имеет 3 независимые обмотки, каждая из которых намотана на двух противоположных полюсах статора. Двигатель на рисунке имеет шаг 30 град.
При включении тока в одной из катушек, ротор стремится занять положение, когда магнитный поток замкнут, т.е. зубцы ротора будут находиться напротив тех полюсов, на которых находится запитанная обмотка. Если затем выключить эту обмотку и включить следующую, то ротор поменяет положение, снова замкнув своими зубцами магнитный поток. Таким образом, чтобы осуществить непрерывное вращение, нужно включать фазы попеременно. Такой двигатель не чувствителен к направлению тока в обмотках, а из-за того, что ротор не имеет магнитных свойств, данный тип двигателя может работать на высоких оборотах. Так же данный тип двигателя легко отличить от других шаговиков, просто повращав его за вал, когда он отключен. Вал будет крутиться свободно, тогда как у остальных типов явно будут ощущаться шаги. Иногда поверхность каждого полюса статора выполняют зубчатой, что вместе с соответствующими зубцами ротора обеспечивает уменьшение значения угла шага до нескольких градусов. Двигатели с переменным магнитным сопротивлением сейчас почти не используют.
Двигатели с постоянными магнитами состоят из статора с обмотками и ротора, содержащего постоянные магниты. Благодаря намагниченности ротора в таких двигателях обеспечивается больший магнитный поток и как следствие, больший момент, чем у двигателей с переменным магнитным сопротивлением.
Показанный на рисунке двигатель имеет 3 пары полюсов ротора и 2 пары полюсов статора. Статор имеет 2 независимые обмотки, каждая из которых намотана на двух противоположных полюсах. Двигатель на рисунке имеет величину шага 30 град, так же, как и предыдущий. При включении тока в одной из катушек, ротор стремится занять такое положение, когда разноименные полюса ротора и статора находятся друг напротив друга и для осуществления непрерывного вращения нужно включать фазы попеременно. На практике двигатели с постоянными магнитами обычно имеют от 48 до 24 шагов на оборот, что соответствует углам шага 7.5 – 15 град).
На практике двигатель с постоянными магнитами выглядит, например, вот так. Увидеть такой двигатель можно в лазерном принтере.
Двигатели с постоянными магнитами подвержены влиянию обратной ЭДС со стороны ротора, которая ограничивает максимальную скорость. Это значит, что при свободном выбеге на больших оборотах двигатель сработает как генератор и может сжечь драйвер током, который сам и сгенерирует. Это же относится и к гибридным двигателям.
Гибридные двигатели сочетают в себе лучшие черты шаговых двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами. Гибридные шаговые двигатели обеспечивают меньшую величину шага, больший момент и большую скорость, чем двигатели с переменным магнитным сопротивлением и двигатели с постоянными магнитами.
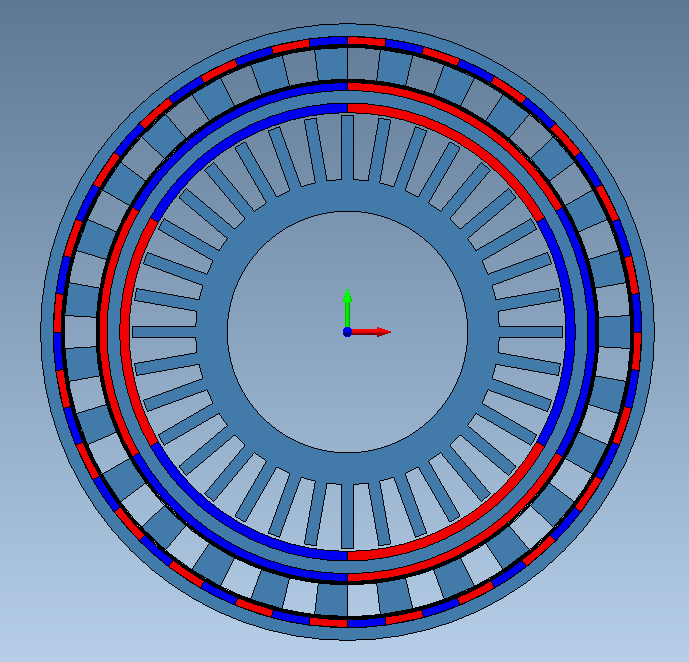
Типичное число шагов на оборот для гибридных двигателей составляет от 100 до 400, что соответсвует углам шага 3.6 – 0.9 градусов. Ротор показанного на рисунке двигателя имеет 100 полюсов (50 пар), двигатель имеет 2 фазы, поэтому полное количество полюсов – 200, а шаг, соответственно, 1.8 град.
Выглядит гибридный двигатель, например, вот так.
Большинство современных шаговых двигателей являются именно гибридными, поэтому давайте подробней рассмотрим устройство шаговых двигателей этого типа.
Ротор двигателя разделен поперек на две части, между которыми расположен цилиндрический постоянным магнит. Благодаря этому зубцы верхней половинки ротора являются северными полюсами, а зубцы нижней половинки – южными. Кроме того, верхняя и нижняя половинки ротора повернуты друг относительно друга на половину угла шага зубцов. Число пар полюсов ротора равно количеству зубцов на одной из его половинок. Зубчатые полюсные наконечники ротора, как и статор, набраны из отдельных пластин для уменьшения потерь на вихревые токи. Статор гибридного двигателя также имеет зубцы, обеспечивая большое количество эквивалентных полюсов, в отличие от основных полюсов, на которых расположены обмотки. Обычно используются 4 основных полюса для двигателей с шагов в 3,6 градуса и 8 основных полюсов в случае шагов в 1.8 и 0.9 градусов. Зубцы ротора обеспечивают меньшее сопротивление магнитной цепи в определенных положениях ротора, что улучшает статический и динамический момент. Это обеспечивается соответствующим расположением зубцов, когда часть зубцов ротора находится строго напротив зубцов статора, а часть между ними.
Посмотрим на продольное сечение гибридного шагового двигателя. Стрелками показано направление магнитного потока постоянного магнита ротора. Часть потока (на рисунке показана черной линией) проходит через полюсные наконечники ротора, воздушные зазоры и полюсный наконечник статора. Эта часть не участвует в создании момента.
Как видно на рисунке, воздушные зазоры у верхнего и нижнего полюсного наконечника ротора разные. Это достигается благодаря повороту полюсных наконечников на половину шага зубьев, что очень хорошо было видно на предыдущем фото. Поэтому существует другая магнитная цепь, которая содержит минимальные воздушные зазоры и, как следствие, обладает минимальным магнитным сопротивлением. По этой цепи замыкается другая часть потока (на рисунке показана штриховой белой линией), которая и создает момент. Часть цепи лежит в плоскости, перпендикулярной рисунку, поэтому она не показана. В этой же плоскости создают магнитный поток катушки статора. В гибридном двигателе этот поток частично замыкается полюсными наконечниками ротора и слабо влияет на постоянный магнит. Поэтому в отличие от двигателей постоянного тока, магнит гибридного шагового двигателя невозможно размагнитить ни при какой величине тока обмоток.
Величина зазора между зубцами ротора и статора очень небольшая, около 0.1 мм. Это требует высокой точности при сборке, поэтому шаговый двигатель не стоит разбирать ради удовлетворения любопытства, иначе на этом его служба может закончиться.
Чтобы магнитный поток не замыкался через вал, который проходит внутри магнита, его изготавливают из немагнитных марок стали.
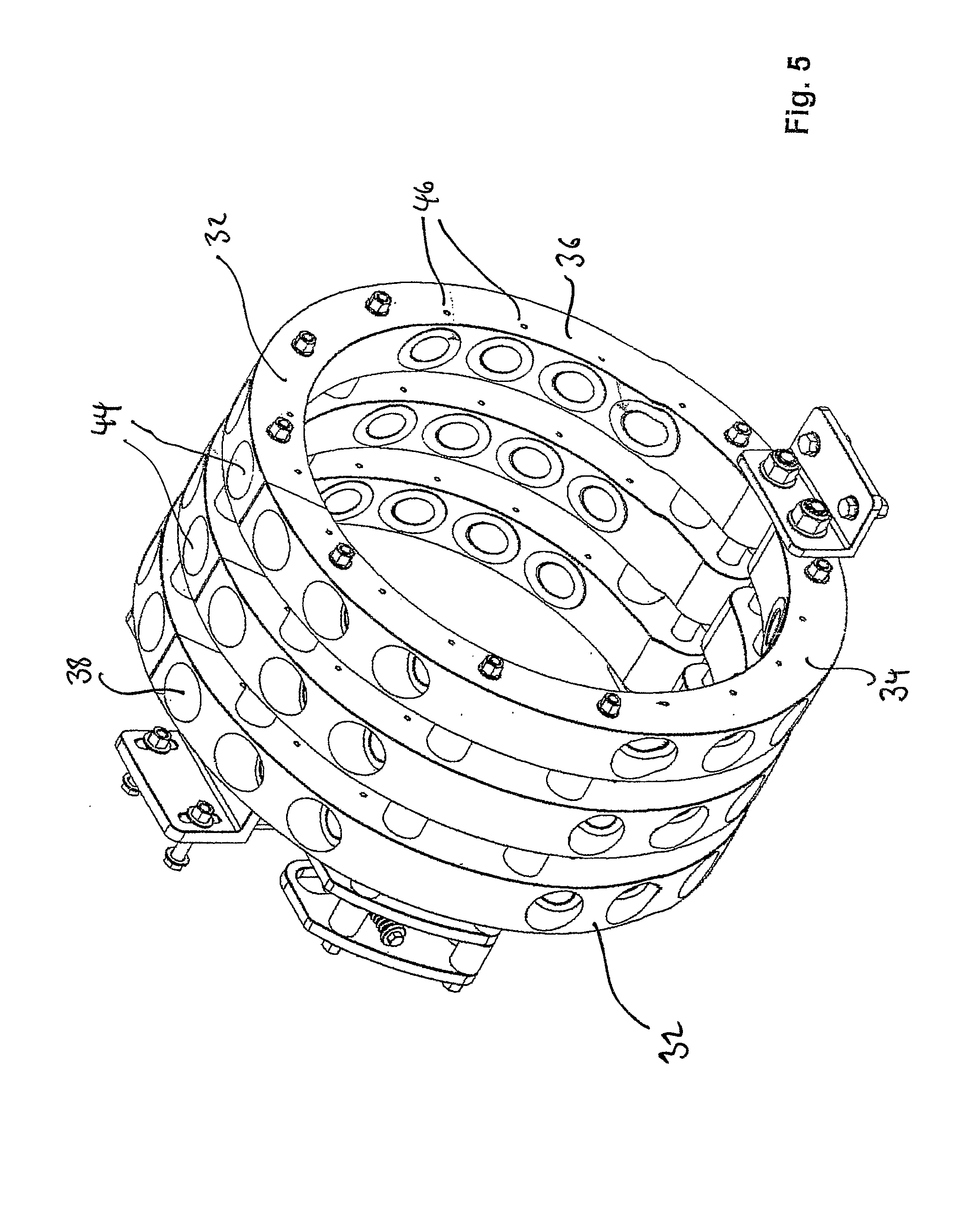
Для получения больших моментов необходимо увеличивать как поле, создаваемое статором, так и поле постоянного магнита . При этом требуется больший диаметр ротора, что ухудшает отношение крутящего момента к моменту инерции. Поэтому мощные шаговые двигатели иногда конструктивно выполняют из нескольких секций в виде этажерки. Крутящий момент и момент инерции увеличиваются пропорционально количеству секций, а их отношение не ухудшается.
Мы рассмотрели устройство самого «железа» шаговых двигателей, но помимо этого двигатели можно еще поделить по количеству и способу коммутации их обмоток.
Тут всего два основных вида – биполярный и униполярный
Биполярный двигатель имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля должна переполюсовываться драйвером. Для такого типа двигателя требуется мостовой или полумостовой драйвер. Всего биполярный двигатель имеет две обмотки и, соответственно, четыре вывода. Примером распространенного биполярного двигателя может быть шаговый двигатель марки 17HS4401
Униполярный двигатель также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки. При этом существенно упрощается схема драйвера, который в случае униполярного двигателя должен иметь только 4 простых ключа. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 выводов, как на рисунке, или 6 выводов в случае если выводы AB и CD разъединены. Униполярный двигатель с двумя обмотками и отводами можно использовать в биполярном режиме, если отводы оставить неподключенными.
Примером распространенного униполярного двигателя с пятью выводами может быть шаговый двигатель марки 28BYJ-48. Данный двигатель можно переделать в биполярный, разделив выводы AB и CD, для чего достаточно перерезать одну из перемычек на плате под синей крышкой.
Иногда двигатели имеют 4 раздельные обмотки, по этой причине их ошибочно называют 4-х фазными или четырехобмоточными двигателями. Каждая обмотка имеет отдельные выводы, поэтому всего выводов 8. При соответствующем соединении обмоток такой двигатель можно использовать и как униполярный, и как биполярный.
Если сравнивать между собой биполярный и униполярный двигатели, то биполярный имеет более высокую удельную мощность, а значит при одних и тех же размерах биполярные двигатели обеспечивают больший момент. Момент, создаваемый шаговым двигателем, пропорционален величине магнитного поля, создаваемого обмотками статора. Путей для повышения магнитного поля два – это увеличение тока или числа витков обмоток. Естественным ограничением при повышении тока обмоток является опасность насыщения железного сердечника, однако на практике гораздо более существенным является ограничение по нагреву двигателя в следствии потерь из-за омического сопротивления обмоток. Тут и проявляется преимущество конструкции биполярных двигателей. В униполярном двигателе в каждый момент времени используется лишь половина обмоток, а другая половина просто занимает место в окне сердечника, что вынуждает делать обмотки проводом меньшего диаметра или увеличивать габариты двигателя. В то же время в биполярном двигателе всегда работают все обмотки. Иными словами, на биполярный двигатель той же мощности надо намотать в два раза меньше медного обмоточного провода, чем на униполярный, а случае, если обмотки равны по массе, то биполярный двигатель будет мощнее примерно на 40%.
На практике можно встретить оба типа двигателей, так как биполярные дешевле из-за меньшей материалоемкости, а униполярные требуют значительно более простых драйверов. В настоящее время наиболее широко распространены гибридные биполярные двигатели.
Где приобрести ШД? Вы можете купить шаговые двигатели в нашем магазине 3DIY с доставкой по всей России!
Управление шаговым двигателем
Независимо от того, какой драйвер или двигатель использован, управление шаговым двигателем может осуществляться в одном из трёх режимов:
-
полношаговое
-
полушаговое
-
микрошаговое
Полношаговый режим управления ШД подразумевает попеременную коммутацию фаз без перекрытия, при этом единовременно к источнику напряжения подключена только одна из фаз. При таком способе управления на каждый полный шаг электродвигателя приходится одна фаза и точки равновесия ротора идентичны полюсам статора. Данный режим имеет и недостаток: в случае с биполярным двигателем в полношаговом режиме в один и тот же момент задействуется только половина обмоток, с униполярным – четверть. Существует и другой вариант полношагового управления, подразумевающий единовременное включение двух фаз. Такой способ управления ШД основан на фиксации ротора между полюсами статора благодаря подаче питания на обмотки, при этом на полный шаг приходится две фазы. При этом способе управления точка равновесия ротора смещается на половину шага относительно способа с одной фазой, а момент возрастает примерно на 40 процентов.
Применение полушагового режима управления шаговым двигателем позволяет увеличить количество шагов, приходящихся на один оборот ротора, в два раза. При работе ШД в таком режиме на каждый второй шаг приходится включение одной из фаз, а между шагами включаются сразу обе. Фактически это комбинация переменного включения однофазного и двухфазного полношаговых режимов.
Микрошаговый режим управления ШД применяется тогда, когда необходимо получение максимально большого количества шагов, приходящихся на оборот ротора. При работе в таком режиме так же работают две фазы, однако токи обмоток в данном случае распределяются неравномерно, а не 50/50, как в полушаговом. Величина микрошага зависит от конкретного устройства и настроек драйвера. При работе в микрошаговом режиме точность позиционирования ШД значительно повышается, однако требуется более сложный драйвер двигателя.
Где приобрести драйвера ШД? Купить драйвера шаговых двигателей можно у нас в онлайн магазине с доставкой!
Конструктивные исполнения ШД
Обычный шаговый двигатель
Тут нет никаких изысков – корпус, вал, в общем стандарт. Широко распространен в разном оборудовании, начиная от фрезеров и 3д принтеров, заканчивая приводом заслонки или мешалки.
Двигатель с полым валом
Шаговые двигатели с полым валом применяются когда существует необходимость передачи крутящего момента без применения соединительных муфт, например для использования в ограниченном пространстве. Так же сквозь него можно продеть длинный вал, который будет торчать с двух сторон и синхронно крутить что-то с одной и с другой стороны.
Двигатель со встроенной в вал приводной гайкой
Такой вид двигателя может найти применение в том случае, если требуется быстрое перемещение на большое расстояние. Длинный винт на высоких оборотах ведет себя подобно скакалке, а при использовании такого мотора винт можно неподвижно натянуть между опорами, а сам мотор закрепить на подвижной части оборудования. Тогда длина и нежесткость винта не будет влиять на максимальную скорость.
Двигатель с двойным валом
В этом исполнении двигатель имеет удлиненный вал, длинный конец которого выступает со стороны задней крышки. На этот удлиненный вал можно повесить барашек, чтоб можно было выставить положение вала вручную, повесить энкодер и получить сервошаговый двигатель, а можно повесить дополнительный шкив или винт, которые будут работать абсолютно синхронно с передним валом.
Двигатель с винтом вместо вала
Находят себе применение например в 3д принтерах или в любом другом месте, где хочется сэкономить место не только на муфте между валом и винтом, но и на подшипниковой опоре винта, роль которой в данном случае выполняют подшипники двигателя.
Двигатель со встроенным тормозом
Позволяет зафиксировать вал в нужной позиции дополнительно к удержанию самим шаговиком. Так же позволяет удерживать вал в случае отключения питания двигателя.
Двигатель с редуктором
Редуктор позволяет понизить обороты двигателя и поднять его крутящий момент. Данное исполнение редко встречается в связи с тем, что шаговые двигатели и так имеют значительный момент на низких оборотах и сами по себе могут достигать весьма низких скоростей вращения.
Двигатель с энкодером
Он же сервошаговый двигатель. Фактически это сервопривод на шаговом двигателе. На удлиненный вал со стороны задней крышки монтируется энкодер в корпусе и благодаря этому мы получаем обратную связь о положении вала двигателя. В случае пропуска шагов двигателем контроллер узнает об этом и ориентируясь на показания энкодера будет подавать дополнительные импульсы до тех пор, пока вал не займет нужное положение. Сервошаговый двигатель используется со своим специальным драйвером, который имеет вход для подключения энкодера.
Преимущества шагового двигателя
- угол поворота ротора определяется числом поданных импульсов. Шаговый двигатель крутится не плавно, а шагами, шаг имеет определенную величину. Поэтому чтобы повернуть вал в нужное положение мы просто подаем известное нам количество импульсов.
- зависимость положения от входных импульсов обеспечивает позиционирование без обратной связи. Один шаг – один импульс. Какое количество импульсов подали, в то положение двигатель и шагнул.
- двигатель обеспечивает полный момент в режиме остановки. Это хорошо тем, что для фиксации положения вала запитанному двигателю не нужен тормоз, можно тормозить его при помощи драйвера.
- прецизионное позиционирование и повторяемость. Хорошие шаговые двигатели имеют точность от 3 до 5% от величины шага. Эта ошибка не накапливается от шага к шагу, так как на один оборот двигателя приходится неизменное количество шагов, совершив которые мы всегда получим поворот на 360 градусов.
- высокая надежность. Высокая надежность двигателя связанна с отсутствием щеток. Срок службы фактически определяется сроком службы подшипников
- возможность получения низких скоростей вращения. Для получения низкой скорости вращения двигателя достаточно замедлить скорость подачи импульсов, тогда двигатель будет медленнее шагать и скорость его вращения будет небольшой.
- большой крутящий момент на низких скоростях. Большой крутящий момент на низких оборотах позволяет отказаться от применения редуктора, что упрощает конструкцию оборудования
- может быть перекрыт довольно большой диапазон скоростей. Скорость вращения двигателя пропорциональна частоте входных импульсов, подавая их быстрее или медленнее мы так же влияем и на скорость вращения.
Недостатки шагового двигателя:
- шаговым двигателем присуще явление резонанса. Шаговые двигатели обладают собственной резонансной частотой. Это связано с тем, что ротор после подачи тока в обмотку некоторое время колеблется, прежде чем зафиксироваться в конечном положении, и колебания тем сильней, чем больше инерция ротора. Резонанс приводит к повышенному шуму, вибрациям и падению крутящего момента двигателя. Один из способов победить резонанс – увеличить деление шага. Мелкие перемещения в микрошаге не требуют длительных разгона и фиксации ротора, быстро останавливают его между шагами и увеличивают частоту шагания выше резонансной.
- возможна потеря контроля положения ввиду работы без обратной связи. При превышении усилия на валу выше того, который может создать двигатель, он начнет пропускать шаги. Так как у двигателя нет обратной связи, то контроллер не может узнать об этом и даже если двигатель начнет вращаться снова, стартует он уже из неправильного рабочего положения. Для устранения этого недостатка можно использовать сервошаговый двигатель или увеличить момент на валу, повысив напряжение, настроив драйвер на больший ток или заменив двигатель на более мощный.
- потребляет энергию независимо от нагрузки. Шаговый двигатель в промежуточном положении фиксируется с полным моментом. Шагает он тоже с полным моментом. Поэтому он продолжает потреблять электричество без особой зависимости от нагрузки на валу. Снизить общее потребление энергии двигателем мы можем применив драйвера, которые уменьшают подаваемый в режиме удержания ток.
- затруднена работа на высоких скоростях. На высоких скоростях вращения шаговый двигатель значительно теряет момент и при достижении определенной частоты оборотов момент становится настолько мал, что вал не может дальше крутиться. В этом момент двигатель останавливается и гудит с частотой подаваемых импульсов. Этот недостаток можно устранить, повысив питающее напряжение, что увеличит крутящий момент как на повышенных, так и на пониженных оборотах, использовать более продвинутый драйвер, который на высоких скоростях вращения переходит на полношаговый режим управления двигателем или попросту заменив шаговик на сервопривод, который рассчитан на высокие скорости.
- невысокая удельная мощность.Шаговый двигатель по удельной мощности на грамм веса не самый энергонасыщенный электропривод. Сделать с этим мы ничего не можем.
- относительно сложная схема управления.Драйвера шаговых двигателей насыщены электроникой. Тут мы тоже не можем что-то изменить.
Как выбрать шаговый двигатель? На какие параметры обратить внимание.
По большому счету, выбор двигателя сводится к выбору нескольких вещей:
- вида двигателя (его размеры)
- тока фазы
- индуктивность
Что касается вида двигателя, то при отсутствии каких-то определенных предпочтений мы бы рекомендовали использовать биполярные шаговые двигатели с 4 выводами, так как они наиболее распространены и, что не менее важно, не менее распространены драйвера для них. То есть случае какой-либо поломки вы легко найдете замену и отремонтируете станок.
Размер двигателя и его ток проще всего подобрать, ориентируясь на готовые станки от известных производителей, которые близки к конструируемому по размерам и характеристикам – проверенная конструкция означает, что двигатели уже подобраны оптимальным образом и можно взять их характеристики за основу. Производитель двигателя в данном случае не особо важен, так как ввиду отработанной технологии производства их характеристики у разных производителей примерно одинаковые.
Остается одна характеристика – индуктивность.
При одинаковом напряжении питания двигатели с большей индуктивностью имеют больший момент на низких оборотах, и меньший – на высоких, как видно из графика. Но большая индуктивность потенциально дает вам возможность получить больший крутящий момент, повысив напряжение питания, тогда как при использовании двигателей с небольшой индуктивностью повышение напряжения может привести к тому, что двигатель будет перегреваться без заметной прибавки в характеристиках. Это связано с тем, что нарастание тока в обмотках с низкой индуктивностью идет быстрее и мы легко можем получить среднее значение тока выше номинального, а как следствие этого – перегрев. Таким образом при прочих равных лучше выбрать двигатель с большим значением индуктивности.
Электродвигатели | Древо познания вики
Анимация, показывающая работу щеточного электродвигателя постоянного тока.
Электродвигатель – это электрическая машина, преобразующая электрическую энергию в механическую. Большинство электродвигателей работают за счет взаимодействия между магнитным полем электродвигателя и электрическим током в проволочной обмотке, создавая силу в виде вращения вала. Электродвигатели могут питаться от источников постоянного тока (DC), таких как батареи, автомобили или выпрямители, или от источников переменного тока (AC), таких как электросеть, инверторы или электрические генераторы.Электрический генератор механически идентичен электродвигателю, но работает в обратном направлении, преобразовывая механическую энергию в электрическую.
Электродвигатели можно классифицировать по таким критериям, как тип источника питания, внутренняя конструкция, применение и тип выходного движения. В дополнение к типам переменного и постоянного тока двигатели могут быть щеточными или бесщеточными, могут иметь различную фазу (см. Однофазные, двухфазные или трехфазные) и могут иметь воздушное или жидкостное охлаждение.Двигатели общего назначения со стандартными размерами и характеристиками обеспечивают удобную механическую мощность для промышленного использования. Самые большие электродвигатели используются для движения судов, сжатия трубопроводов и гидроаккумулирующих устройств с номинальной мощностью до 100 мегаватт. Электродвигатели используются в промышленных вентиляторах, нагнетателях и насосах, станках, бытовых приборах, электроинструментах и дисководах. Маленькие моторы можно найти в электрических часах.
В определенных приложениях, например, при рекуперативном торможении с помощью тяговых двигателей, электродвигатели могут использоваться в обратном направлении в качестве генераторов для рекуперации энергии, которая в противном случае могла бы быть потеряна в виде тепла и трения.
Электродвигатели создают линейную или вращательную силу (крутящий момент) и могут отличаться от таких устройств, как магнитные соленоиды и громкоговорители, которые преобразуют электричество в движение, но не генерируют полезную механическую силу, которые соответственно называются исполнительными механизмами и преобразователями.
Вид в разрезе через статор асинхронного двигателя.
Компоненты
Ротор электродвигателя (слева) и статор (справа)
Ротор
- Основные статьи: Ротор (электрический)
В электродвигателе движущейся частью является ротор, который вращает вал для передачи механической энергии.В ротор обычно проложены проводники, по которым проходят токи, которые взаимодействуют с магнитным полем статора, создавая силы, вращающие вал. В качестве альтернативы некоторые роторы несут постоянные магниты, а статор удерживает проводники.
Подшипники
Ротор поддерживается подшипниками, которые позволяют ротору вращаться вокруг своей оси. Подшипники, в свою очередь, поддерживаются корпусом двигателя. Вал двигателя проходит через подшипники за пределы двигателя, где действует нагрузка.Поскольку силы нагрузки действуют за пределы самого крайнего подшипника, считается, что нагрузка составляет , консольная .
Статор
- Основные статьи: Статор
Статор – это неподвижная часть электромагнитной цепи двигателя и обычно состоит из обмоток или постоянных магнитов. Сердечник статора состоит из множества тонких металлических листов, называемых пластинами. Ламинирование используется для уменьшения потерь энергии, которые могут возникнуть при использовании твердого сердечника.
Воздушный зазор
Расстояние между ротором и статором называется воздушным зазором. Воздушный зазор имеет важное значение и, как правило, должен быть как можно меньше, поскольку большой зазор оказывает сильное отрицательное влияние на производительность. Это основной источник низкого коэффициента мощности, с которым работают двигатели. Ток намагничивания увеличивается с увеличением воздушного зазора. По этой причине воздушный зазор должен быть минимальным. Очень маленькие зазоры могут создавать механические проблемы в дополнение к шуму и потерям.
Явнополюсный ротор
Обмотки
- Основные статьи: Обмотки
Обмотки – это провода, которые уложены в катушки, обычно намотанные вокруг многослойного магнитного сердечника из мягкого железа, чтобы образовывать магнитные полюса при возбуждении током.
Электрические машины бывают двух основных конфигураций полюсов магнитного поля: явнополюсные – и несоприкасающиеся полюса . В явнополюсной машине магнитное поле полюса создается обмоткой, намотанной вокруг полюса под лицевой стороной полюса. В машине с несоциальными полюсами , или распределенном поле, или круглороторной машине, обмотка распределена в пазах на торцах полюсов. Двигатель с экранированными полюсами имеет обмотку вокруг части полюса, которая задерживает фазу магнитного поля для этого полюса.
У некоторых двигателей есть проводники, которые состоят из более толстого металла, например стержней или листов металла, обычно меди или алюминия. Обычно они питаются от электромагнитной индукции.
Коммутатор
- Основные статьи: Коммутатор (электрический)
Маленький двигатель постоянного тока игрушки с его коммутатором
Коммутатор – это механизм, используемый для переключения входа большинства машин постоянного тока и некоторых машин переменного тока. Он состоит из сегментов контактных колец, изолированных друг от друга и от вала.Ток якоря двигателя подается через неподвижные щетки, контактирующие с вращающимся коммутатором, что вызывает требуемое изменение направления тока и подает мощность на машину оптимальным образом по мере вращения ротора от полюса к полюсу. В отсутствие такого реверсирования тока двигатель остановился бы. В свете усовершенствованных технологий в полях электронного контроллера, бессенсорного управления, асинхронного двигателя и двигателя с постоянными магнитами, асинхронные двигатели с внешней коммутацией и двигатели с постоянными магнитами вытесняют двигатели с электромеханической коммутацией.
Электромагнетизм
Усилие и крутящий момент
Основное назначение подавляющего большинства электродвигателей в мире – электромагнитное возбуждение относительного движения в воздушном зазоре между статором и ротором для создания полезного крутящего момента или линейной силы.
Согласно закону силы Лоренца сила проводника обмотки может быть просто выражена следующим образом:
или более широко, для работы с проводниками любой геометрии:
Наиболее общие подходы к вычислению сил в двигателях используют тензоры.
Мощность
Где об / мин – частота вращения вала, а T – крутящий момент, механическая выходная мощность двигателя P em определяется выражением,
в британских единицах, где T выражается в фут-фунтах,
- (лошадиные силы) и,
в единицах СИ с угловой скоростью вала, выраженной в радианах в секунду, и T, выраженным в ньютон-метрах,
- (Ватт).
Для линейного двигателя с силой F, выраженной в ньютонах, и скоростью v, выраженной в метрах в секунду,
- (Ватт).
В асинхронном или асинхронном двигателе соотношение между скоростью двигателя и мощностью воздушного зазора без учета скин-эффекта определяется следующим образом:
- , где
- R r – сопротивление ротора
- I r 2 – квадрат индуцированного тока в роторе
- с – пробуксовка мотора; то есть разница между синхронной скоростью и скоростью скольжения, которая обеспечивает относительное движение, необходимое для индукции тока в роторе.
Задняя ЭДС
- Основные статьи: Электродвижущая сила
Поскольку обмотки якоря постоянного или универсального двигателя движутся через магнитное поле, в них индуцируется напряжение. Это напряжение имеет тенденцию противодействовать напряжению питания двигателя и поэтому называется «противоэлектродвижущей силой (ЭДС)». Напряжение пропорционально скорости вращения двигателя. Обратная ЭДС двигателя плюс падение напряжения на внутреннем сопротивлении обмотки и щетках должны равняться напряжению на щетках.Это обеспечивает основной механизм регулирования скорости в двигателе постоянного тока. Если механическая нагрузка увеличивается, двигатель замедляется; в результате возникает ЭДС нижней части спины, и больше тока потребляется от источника питания. Этот увеличенный ток обеспечивает дополнительный крутящий момент для уравновешивания новой нагрузки.
В машинах переменного тока иногда полезно учитывать источник обратной ЭДС внутри машины; например, это особенно важно при точном регулировании скорости асинхронных двигателей на частотно-регулируемых приводах.
Потери
Потери двигателя в основном связаны с резистивными потерями в обмотках, потерями в сердечнике и механическими потерями в подшипниках, а также аэродинамическими потерями, особенно при наличии охлаждающих вентиляторов.
Потери также возникают при коммутации, искрообразовании в механических коммутаторах и электронных коммутаторах, а также при рассеивании тепла.
КПД
Для расчета КПД двигателя механическая выходная мощность делится на входную электрическую:
- ,
где – эффективность преобразования энергии, – входная электрическая мощность и – механическая выходная мощность:
где входное напряжение, входной ток, выходной крутящий момент и выходная угловая скорость.Можно аналитически вывести точку максимальной эффективности. Обычно он составляет менее 1/2 крутящего момента при остановке.
Различные регулирующие органы во многих странах приняли и внедрили законы, поощряющие производство и использование электродвигателей с более высоким КПД.
Коэффициент качества
- Основные статьи: Фактор качества
Эрик Лэйтуэйт предложил метрику для определения «качества» электродвигателя:
Где:
- – коэффициент качества (коэффициенты выше 1, вероятно, будут эффективными)
- – площади поперечного сечения магнитной и электрической цепи
- – длины магнитной и электрической цепей
- – проницаемость керна
- – это угловая частота, на которой приводится двигатель.
Из этого он показал, что наиболее эффективные двигатели, вероятно, имеют относительно большие магнитные полюса.Однако это уравнение напрямую относится только к двигателям без ПМ.
Основные категории
Электродвигатели работают на трех различных физических принципах: магнетизме, электростатике и пьезоэлектричестве. Безусловно, наиболее распространенным является магнетизм.
В магнитных двигателях магнитные поля образуются как в роторе, так и в статоре. Продукт между этими двумя полями создает силу и, следовательно, крутящий момент на валу двигателя. Одно или оба этих поля должны изменяться при вращении двигателя.Это делается путем включения и выключения шестов в нужное время или изменения силы шеста.
Основными типами являются двигатели постоянного и переменного тока, причем первые все чаще заменяются вторыми.
Электродвигатели переменного тока бывают асинхронными или синхронными.
После запуска синхронному двигателю требуется синхронизация с синхронной скоростью движущегося магнитного поля для всех нормальных условий крутящего момента.
В синхронных машинах магнитное поле должно создаваться средствами, отличными от индукции, такими как отдельно возбужденные обмотки или постоянные магниты.
Двигатель с дробной мощностью (FHP) либо имеет номинальную мощность ниже 1 лошадиных сил (0,746 кВт), либо изготавливается с размером стандартной рамы меньше, чем стандартный двигатель мощностью 1 л.с. Многие бытовые и промышленные двигатели относятся к классу маломощных.
| Самокоммутатор | с внешней коммутацией | |||
|---|---|---|---|---|
| Механический- Коллекторные двигатели | Электронный – Коммутатор (ЕС) Двигатели [нижний альфа 1] | Асинхронные машины | Синхронные Машины 2 | |
| AC [нижний альфа 2] | DC | AC 5 , 6 | AC 6 | |
| Двигатель постоянного тока с электрическим возбуждением :
Двигатель постоянного тока с постоянными магнитами | С ротором PM: С ферромагнитным ротором: | Трехфазные двигатели: Двигатели переменного тока: 10 | Трехфазные двигатели: Двигатели переменного тока: 10
| |
| Простая электроника | Выпрямитель, линейный транзистор (ы) или прерыватель постоянного тока | Более сложная электроника | Самая совершенная электроника (ЧРП), если таковая имеется | |
Примечания:
- Вращение не зависит от частоты переменного напряжения.
- Вращение равно синхронной скорости (скорость двигателя-статора-поля).
- В SCIM вращение с фиксированной скоростью равно синхронной скорости, за вычетом скорости скольжения.
- В системах рекуперации энергии с противоскользящим покрытием WRIM обычно используется для запуска двигателя, но может использоваться для изменения скорости нагрузки.
- Работа с переменной скоростью.
- В то время как приводы с асинхронными и синхронными двигателями обычно имеют шестиступенчатый или синусоидальный выход, приводы с BLDC обычно имеют форму сигнала трапециевидного тока; Однако поведение как синусоидальных, так и трапециевидных машин с постоянным магнитом идентично с точки зрения их фундаментальных аспектов.
- При работе с регулируемой скоростью WRIM используется в системах рекуперации энергии скольжения и в индукционных машинах с двойной подачей.
- Клеточная обмотка – это короткозамкнутый короткозамкнутый ротор с короткозамкнутым ротором, обмотка с обмоткой подключена снаружи через контактные кольца.
- В основном однофазные, некоторые – трехфазные.
Сокращения:
Электродвигатель с автоматическим переключением
Щеточный двигатель постоянного тока
- Основные статьи: Двигатель постоянного тока
По определению, все двигатели постоянного тока с автоматической коммутацией работают от электроэнергии постоянного тока.Большинство двигателей постоянного тока представляют собой типы с маленькими постоянными магнитами (PM). Они содержат щеточную внутреннюю механическую коммутацию для реверсирования тока обмоток двигателя синхронно с вращением.
Двигатель постоянного тока с электрическим возбуждением
- Основные статьи: Щеточный электродвигатель постоянного тока
Работа щеточного электродвигателя с двухполюсным ротором и статором с постоянными магнитами. («N» и «S» обозначают полярности на внутренних сторонах магнитов; внешние грани имеют противоположные полярности.)
Коммутируемый двигатель постоянного тока имеет набор вращающихся обмоток, намотанных на якорь, установленный на вращающемся валу.На валу также находится коммутатор, долговечный поворотный электрический переключатель, который периодически меняет направление тока в обмотках ротора по мере вращения вала. Таким образом, каждый щеточный двигатель постоянного тока имеет переменный ток, протекающий через его вращающиеся обмотки. Ток протекает через одну или несколько пар щеток, установленных на коммутаторе; щетки подключают внешний источник электроэнергии к вращающемуся якорю.
Вращающийся якорь состоит из одной или нескольких катушек проволоки, намотанных на ламинированный магнитно «мягкий» ферромагнитный сердечник.Ток от щеток протекает через коммутатор и одну обмотку якоря, что делает его временным магнитом (электромагнитом). Магнитное поле, создаваемое якорем, взаимодействует со стационарным магнитным полем, создаваемым либо PM, либо другой обмоткой (катушкой возбуждения), являющейся частью корпуса двигателя. Сила между двумя магнитными полями приводит к вращению вала двигателя. Коммутатор переключает питание на катушки при вращении ротора, предотвращая полное совпадение магнитных полюсов ротора с магнитными полюсами поля статора, так что ротор никогда не останавливается (как это делает стрелка компаса), а скорее продолжает вращаться. пока подано питание.
Многие ограничения классического коллекторного двигателя постоянного тока связаны с необходимостью прижимания щеток к коммутатору. Это создает трение. Искры создаются щетками, замыкая и размыкая цепи через обмотки ротора, когда щетки пересекают изоляционные зазоры между секциями коллектора. В зависимости от конструкции коммутатора, это может включать в себя замыкание щеток между соседними секциями – и, следовательно, концами катушки – на мгновение при пересечении зазоров. Кроме того, индуктивность катушек ротора заставляет напряжение на каждой из них повышаться при размыкании цепи, увеличивая искрение щеток.Это искрение ограничивает максимальную скорость машины, так как слишком быстрое искрение приведет к перегреву, разрушению или даже расплавлению коллектора. Плотность тока на единицу площади щеток в сочетании с их удельным сопротивлением ограничивает мощность двигателя. Замыкание и размыкание электрического контакта также вызывает электрический шум; искрение порождает радиопомехи. Щетки со временем изнашиваются и требуют замены, а сам коллектор подлежит износу и техническому обслуживанию (на более крупных двигателях) или замене (на небольших двигателях).Сборка коммутатора на большом двигателе – дорогостоящий элемент, требующий точной сборки многих деталей. В небольших двигателях коллектор обычно постоянно встроен в ротор, поэтому его замена обычно требует замены всего ротора.
Хотя большинство коммутаторов имеют цилиндрическую форму, некоторые из них представляют собой плоские диски, состоящие из нескольких сегментов (обычно не менее трех), установленных на изоляторе.
Большие щетки желательны для большей площади контакта щеток, чтобы максимизировать мощность двигателя, но маленькие щетки желательны для малой массы, чтобы максимизировать скорость, с которой двигатель может работать, без чрезмерного подпрыгивания щеток и искрения.(Маленькие щетки также желательны для более низкой стоимости.) Более жесткие щеточные пружины также могут использоваться, чтобы заставить щетки заданной массы работать с более высокой скоростью, но за счет больших потерь на трение (более низкая эффективность) и ускоренного износа щеток и коллектора. Следовательно, конструкция щетки двигателя постоянного тока предполагает компромисс между выходной мощностью, скоростью и эффективностью / износом.
Машины постоянного тока определяются следующим образом:
- Цепь якоря – обмотка, по которой передается ток нагрузки, которая может быть либо неподвижной, либо вращающейся частью двигателя или генератора.
- Цепь возбуждения – Набор обмоток, создающих магнитное поле, так что электромагнитная индукция может иметь место в электрических машинах.
- Коммутация: Механический метод, с помощью которого можно добиться выпрямления или получить постоянный ток в машинах постоянного тока.
Есть пять типов щеточных двигателей постоянного тока:
- Двигатель постоянного тока с параллельной обмоткой
- Двигатель постоянного тока с последовательной обмоткой Составной двигатель постоянного тока
- (две конфигурации):
- Суммарное соединение
- Дифференциально сложное
- Двигатель постоянного тока с постоянными магнитами (не показан)
- Отдельно возбужденный (не показан).
Двигатель постоянного тока с постоянным магнитом
- Основные статьи: Электродвигатель с постоянными магнитами
Двигатель с постоянными магнитами не имеет обмотки возбуждения на раме статора, а полагается на постоянные магниты для создания магнитного поля, с которым поле ротора взаимодействует для создания крутящего момента. Компенсирующие обмотки, включенные последовательно с якорем, могут использоваться на больших двигателях для улучшения коммутации под нагрузкой. Поскольку это поле является фиксированным, его нельзя настроить для управления скоростью.Поля с постоянными магнитами (статоры) удобны в миниатюрных двигателях, чтобы исключить потребление энергии обмоткой возбуждения. Большинство более крупных двигателей постоянного тока относятся к типу «динамо» с обмотками статора. Исторически сложилось так, что PM нельзя было заставить сохранять высокий поток, если они были разобраны; обмотки возбуждения были более практичными для получения необходимого количества магнитного потока. Однако большие PM являются дорогостоящими, опасными и сложными в сборке; это благоприятствует намотанным полям для больших машин.
Чтобы минимизировать общий вес и размер, миниатюрные двигатели с постоянными магнитами могут использовать высокоэнергетические магниты, сделанные из неодима или других стратегических элементов; большинство из них – сплав неодим-железо-бор.Благодаря более высокой плотности магнитного потока электрические машины с высокоэнергетическими ФЭУ, по крайней мере, конкурентоспособны со всеми оптимально спроектированными синхронными и индукционными электрическими машинами с однополярным питанием. Миниатюрные двигатели напоминают структуру на иллюстрации, за исключением того, что у них есть по крайней мере три полюса ротора (для обеспечения запуска, независимо от положения ротора), а их внешний корпус представляет собой стальную трубку, которая магнитно связывает внешние части изогнутых магнитов поля.
Электродвигатель с электронным коллектором (EC)
Бесщеточный двигатель постоянного тока
- Основные статьи: Бесщеточный электродвигатель постоянного тока
Некоторые проблемы щеточного электродвигателя постоянного тока устранены в конструкции BLDC.В этом двигателе механический «вращающийся переключатель» или коммутатор заменен внешним электронным переключателем, синхронизированным с положением ротора. Двигатели BLDC обычно имеют КПД 85–90% или более. Сообщается о КПД двигателя BLDC до 96,5%, тогда как электродвигатели постоянного тока с щеткой обычно имеют КПД 75–80%.
Характерная форма волны трапециевидной противодвижущей силы (CEMF) двигателя BLDC частично обусловлена равномерным распределением обмоток статора и частично размещением постоянных магнитов ротора.Также известные как двигатели постоянного тока с электронной коммутацией или двигатели постоянного тока наизнанку, обмотки статора трапециевидных двигателей BLDC могут быть однофазными, двухфазными или трехфазными и использовать датчики на эффекте Холла, установленные на их обмотках для определения положения ротора и недорогие закрытые. -контурное управление электронным коммутатором.
ДвигателиBLDC обычно используются там, где необходимо точное управление скоростью, например, в дисководах компьютеров или в видеомагнитофонах, в шпинделях в приводах компакт-дисков, компакт-дисков (и т. Д.), А также в механизмах офисных товаров, таких как вентиляторы, лазерные устройства. принтеры и копировальные аппараты.У них есть несколько преимуществ перед обычными моторами:
- По сравнению с вентиляторами переменного тока, использующими двигатели с экранированными полюсами, они очень эффективны и работают намного холоднее, чем эквивалентные двигатели переменного тока. Такой холодный режим работы приводит к значительному увеличению срока службы подшипников вентилятора.
- Без изнашиваемого коммутатора срок службы двигателя BLDC может быть значительно больше по сравнению с двигателем постоянного тока, использующим щетки и коммутатор. Коммутация также имеет тенденцию вызывать большое количество электрических и радиочастотных помех; Без коммутатора или щеток двигатель BLDC может использоваться в электрически чувствительных устройствах, таких как аудиооборудование или компьютеры.
- Те же датчики на эффекте Холла, которые обеспечивают коммутацию, также могут обеспечивать удобный сигнал тахометра для приложений с замкнутым контуром (сервоуправлением). В вентиляторах сигнал тахометра может использоваться для получения сигнала «вентилятор исправен», а также для обеспечения обратной связи по скорости вращения.
- Двигатель можно легко синхронизировать с внутренними или внешними часами, что позволяет точно регулировать скорость. Двигатели
- BLDC не имеют шансов на искрение, в отличие от щеточных двигателей, что делает их более подходящими для сред с летучими химическими веществами и топливом.Кроме того, искрение генерирует озон, который может накапливаться в плохо вентилируемых зданиях, что может нанести вред здоровью людей. Двигатели
- BLDC обычно используются в небольшом оборудовании, таком как компьютеры, и обычно используются в вентиляторах, чтобы избавиться от нежелательного тепла.
- Это также очень тихие двигатели с акустической точки зрения, что является преимуществом при использовании в оборудовании, подверженном вибрации.
Мощность современных двигателей BLDC варьируется от долей ватта до многих киловатт. В электромобилях используются более крупные двигатели BLDC мощностью примерно до 100 кВт.Они также находят значительное применение в высокопроизводительных электрических моделях самолетов.
Импульсный реактивный двигатель
6/4 полюсный реактивный двигатель
- Основные статьи: реактивный реактивный двигатель
SRM не имеет щеток или постоянных магнитов, а ротор не имеет электрического тока. Вместо этого крутящий момент возникает из-за небольшого несовпадения полюсов ротора с полюсами статора. Ротор выравнивается с магнитным полем статора, в то время как обмотки возбуждения статора последовательно возбуждаются для вращения поля статора.
Магнитный поток, создаваемый обмотками возбуждения, следует по пути наименьшего магнитного сопротивления, что означает, что магнитный поток будет проходить через полюса ротора, которые находятся ближе всего к находящимся под напряжением полюсам статора, тем самым намагничивая эти полюса ротора и создавая крутящий момент. Когда ротор вращается, различные обмотки будут запитаны, поддерживая вращение ротора.
SRM используются в некоторых приборах и транспортных средствах.
Универсальный двигатель переменного / постоянного тока
- Основные статьи: Универсальный мотор
Современный недорогой универсальный мотор, от пылесоса.Обмотки возбуждения окрашены в темно-медный цвет с обеих сторон назад. Ламинированный сердечник ротора – серый металлик с темными пазами для намотки катушек. Коммутатор (частично скрыт) потемнел от использования; он направлен вперед. Большая коричневая деталь из формованного пластика на переднем плане поддерживает направляющие и щетки (с обеих сторон), а также передний подшипник двигателя.
Коммутируемый двигатель с последовательным или параллельным возбуждением с электрическим возбуждением называется универсальным двигателем, поскольку он может быть разработан для работы от источника переменного или постоянного тока.Универсальный двигатель может хорошо работать на переменном токе, потому что ток как в поле, так и в катушках якоря (и, следовательно, результирующие магнитные поля) будут чередоваться (обратная полярность) синхронно, и, следовательно, результирующая механическая сила будет возникать в постоянном направлении вращения. .
Универсальные двигатели, работающие на обычных частотах электросети, часто имеют мощность менее 1000 Вт. Универсальные двигатели также легли в основу традиционного железнодорожного тягового двигателя на электрических железных дорогах.В этом приложении использование переменного тока для питания двигателя, изначально предназначенного для работы на постоянном токе, привело бы к потерям эффективности из-за нагрева вихревым током их магнитных компонентов, особенно полюсных наконечников поля двигателя, которые для постоянного тока использовали бы твердые ( неламинированный) чугун и сейчас они используются редко.
Преимущество универсального двигателя заключается в том, что источники питания переменного тока могут использоваться на двигателях, которые имеют некоторые характеристики, более общие для двигателей постоянного тока, в частности, высокий пусковой момент и очень компактную конструкцию, если используются высокие скорости вращения.Отрицательный аспект – проблемы с обслуживанием и коротким сроком службы, вызванные коммутатором. Такие двигатели используются в устройствах, таких как миксеры для пищевых продуктов и электроинструменты, которые используются только с перерывами и часто имеют высокие требования к пусковому крутящему моменту. Несколько ответвлений на катушке возбуждения обеспечивают (неточное) ступенчатое регулирование скорости. Бытовые блендеры, рекламирующие много скоростей, часто сочетают в себе катушку возбуждения с несколькими ответвлениями и диод, который можно вставить последовательно с двигателем (в результате чего двигатель работает от полуволнового выпрямленного переменного тока).Универсальные двигатели также подходят для электронного управления скоростью и, как таковые, являются идеальным выбором для таких устройств, как бытовые стиральные машины. Двигатель можно использовать для перемешивания барабана (как вперед, так и назад) путем переключения обмотки возбуждения относительно якоря.
В то время как SCIM не могут вращать вал быстрее, чем разрешено частотой сети, универсальные двигатели могут работать на гораздо более высоких скоростях. Это делает их полезными для таких приборов, как блендеры, пылесосы и фены, где желательны высокая скорость и легкий вес.Они также обычно используются в портативных электроинструментах, таких как дрели, шлифовальные машины, циркулярные и лобзиковые пилы, где характеристики двигателя хорошо работают. Моторы многих пылесосов и триммеров для сорняков превышают 10 000 об / мин, в то время как многие аналогичные миниатюрные измельчители превышают 30 000 об / мин.
Банкноты
- ↑ Термин «электродвигатель с электронным коллектором» (ECM) отождествляется с отраслью отопления, вентиляции и кондиционирования (HVAC), причем различие между BLDC и BLAC в этом контексте рассматривается как функция степени сложности привода ECM с Приводы BLDC обычно имеют простой однофазный скалярный регулируемый по напряжению трапециевидный выходной сигнал тока, включающий конструкцию двигателя с постоянными магнитами на поверхности, а приводы BLAC имеют тенденцию к более сложной трехфазной векторно-управляемой синусоидальной форме сигнала с регулируемым током, включающей внутреннюю конструкцию двигателя с постоянными магнитами.
- ↑ Универсальные и отталкивающие двигатели являются частью класса двигателей, известных как коллекторные двигатели переменного тока, который также включает в себя следующие в значительной степени устаревшие типы двигателей: однофазные – прямые и компенсированные последовательные двигатели, железнодорожные двигатели; трехфазный – различные типы отталкивающих двигателей, серийный двигатель с переключением щеток, многофазный шунт с переключением щеток или двигатель Шраге, двигатель Fynn-Weichsel.
Список литературы
Список литературы
| На этой странице используется контент, который, хотя изначально был импортирован из Википедии , статья Электродвигатель , возможно, была очень сильно модифицирована, возможно, даже до такой степени, что она полностью не соответствовала исходной статье в Википедии. Список авторов можно увидеть на страницах истории . Текст Википедии доступен по лицензии Creative Commons License . |
Что такое бесщеточные двигатели постоянного тока
Понимание принципа и применения высокоэффективных двигателей: 1 из 3
Двигатель преобразует подаваемую электрическую энергию в механическую. Обычно используются различные типы двигателей. Среди них бесщеточные двигатели постоянного тока (BLDC) отличаются высоким КПД и отличной управляемостью и широко используются во многих приложениях.Двигатель BLDC имеет преимущества в энергосбережении по сравнению с двигателями других типов.
Двигатели силовые агрегаты
Когда инженеры сталкиваются с проблемой проектирования электрического оборудования для выполнения механических задач, они могут подумать о том, как электрические сигналы преобразуются в энергию. Таким образом, исполнительные механизмы и двигатели относятся к устройствам, преобразующим электрические сигналы в движение. Двигатели обменивают электрическую энергию на механическую.
Самый простой тип двигателя – щеточный двигатель постоянного тока.В этом типе двигателя электрический ток проходит через катушки, которые расположены в фиксированном магнитном поле. Ток создает магнитные поля в катушках; это заставляет узел катушки вращаться, поскольку каждая катушка отталкивается от аналогичного полюса и тянется к противоположному полюсу фиксированного поля. Чтобы поддерживать вращение, необходимо постоянно реверсировать ток – так, чтобы полярность катушки постоянно менялась, заставляя катушки продолжать «преследовать» разные фиксированные полюса. Питание катушек подается через неподвижные токопроводящие щетки, которые контактируют с вращающимся коммутатором; именно вращение коммутатора вызывает изменение направления тока в катушках.Коммутатор и щетки являются ключевыми компонентами, отличающими щеточный двигатель постоянного тока от других типов двигателей. На рисунке 1 показан общий принцип работы щеточного двигателя.
Рисунок 1: Работа щеточного двигателя постоянного тока.
Неподвижные щетки подают электроэнергию на вращающийся коммутатор. Когда коммутатор вращается, он постоянно меняет направление тока в катушках, меняя полярность катушек, чтобы катушки сохраняли правое вращение.Коммутатор вращается, потому что он прикреплен к ротору, на котором установлены катушки.
Общие типы двигателей
Двигателиразличаются по типу мощности (переменного или постоянного тока) и способу создания вращения (Рисунок 2). Ниже мы кратко рассмотрим особенности и способы использования каждого типа.
Рисунок 2: Различные типы двигателей
Электродвигатели постоянного токас щеткой, отличающиеся простой конструкцией и легким управлением, широко используются для открывания и закрывания лотков для дисков.В автомобилях они часто используются для втягивания, выдвижения и установки боковых окон с электроприводом. Низкая стоимость этих двигателей делает их пригодными для многих применений. Однако одним из недостатков является то, что щетки и коммутаторы имеют тенденцию к относительно быстрому износу в результате их постоянного контакта, что требует частой замены и периодического обслуживания.
Шаговый двигатель приводится в действие импульсами; он поворачивается на определенный угол (шаг) с каждым импульсом. Поскольку вращение точно контролируется количеством полученных импульсов, эти двигатели широко используются для выполнения позиционных регулировок.Они часто используются, например, для управления подачей бумаги в факсимильных аппаратах и принтерах, поскольку эти устройства подают бумагу с фиксированными шагами, которые легко коррелируют с количеством импульсов. Паузу также можно легко контролировать, поскольку вращение двигателя мгновенно прекращается при прерывании импульсного сигнала.
В синхронных двигателях вращение синхронно с частотой питающего тока. Эти двигатели часто используются для привода вращающихся противней в микроволновых печах; редукторы в моторном блоке можно использовать для получения подходящей скорости вращения для нагрева пищи.Скорость вращения асинхронных двигателей также зависит от частоты; но движение не синхронное. В прошлом эти двигатели часто использовались в электрических вентиляторах и стиральных машинах.
Обычно используются различные типы двигателей. На этом занятии мы рассмотрим преимущества и применение бесщеточных двигателей постоянного тока.
Почему двигатели BLDC вращаются?
Как следует из названия, в бесщеточных двигателях постоянного тока щетки не используются. В щеточных двигателях щетки подают ток через коммутатор в катушки на роторе.Так как же бесщеточный двигатель пропускает ток на катушки ротора? Это не так – потому что катушки не расположены на роторе. Вместо этого ротор представляет собой постоянный магнит; Катушки не вращаются, а вместо этого фиксируются на статоре. Поскольку катушки не двигаются, нет необходимости в щетках и коммутаторе. (См. Рисунок 3.)
В щеточном двигателе вращение достигается за счет управления магнитными полями, создаваемыми катушками на роторе, в то время как магнитное поле, создаваемое неподвижными магнитами, остается фиксированным.Чтобы изменить скорость вращения, вы меняете напряжение на катушках. В двигателе BLDC вращается постоянный магнит; вращение достигается за счет изменения направления магнитных полей, создаваемых окружающими неподвижными катушками. Чтобы контролировать вращение, вы регулируете величину и направление тока в этих катушках.
Рисунок 3: Двигатель BLDC.
Поскольку ротор представляет собой постоянный магнит, ему не нужен ток, что устраняет необходимость в щетках и коммутаторе.Ток в неподвижных катушках контролируется извне.
Преимущества двигателей BLDC
Двигатель BLDC с тремя катушками на статоре будет иметь шесть электрических проводов (по два на каждую катушку), отходящих от этих катушек. В большинстве реализаций три из этих проводов будут соединены внутри, а три оставшихся провода отходят от корпуса двигателя (в отличие от двух проводов, отходящих от щеточного двигателя, описанного ранее). Электропроводка в корпусе двигателя BLDC более сложна, чем просто соединение положительной и отрицательной клемм силового элемента; мы более подробно рассмотрим, как работают эти двигатели, во второй части этой серии.В заключение мы рассмотрим преимущества двигателей BLDC.
Одним из больших преимуществ является эффективность, так как эти двигатели могут непрерывно управлять с максимальной силой вращения (крутящим моментом). Щеточные двигатели, напротив, достигают максимального крутящего момента только в определенных точках вращения. Для того, чтобы щеточный двигатель обеспечивал такой же крутящий момент, как и бесщеточная модель, необходимо использовать более крупные магниты. Вот почему даже небольшие двигатели BLDC могут обеспечивать значительную мощность.
Второе большое преимущество – связанное с первым – это управляемость.Двигателями BLDC можно управлять с помощью механизмов обратной связи, чтобы обеспечить точный требуемый крутящий момент и скорость вращения. Прецизионное управление, в свою очередь, снижает потребление энергии и тепловыделение, а в случаях, когда двигатели питаются от батареи, увеличивает срок ее службы.
ДвигателиBLDC также отличаются высокой прочностью и низким уровнем электрического шума благодаря отсутствию щеток. В щеточных двигателях щетки и коллектор изнашиваются в результате постоянного движущегося контакта, а также образуют искры в местах контакта.Электрический шум, в частности, является результатом сильных искр, которые, как правило, возникают в областях, где щетки проходят через зазоры в коммутаторе. Вот почему двигатели BLDC часто считаются предпочтительными в приложениях, где важно избегать электрических шумов.
Идеальное применение для двигателей BLDC
Мы убедились, что двигатели BLDC обладают высокой эффективностью и управляемостью, а также имеют длительный срок службы. Так для чего они нужны? Благодаря своей эффективности и долговечности они широко используются в устройствах, которые работают непрерывно.Они давно используются в стиральных машинах, кондиционерах и другой бытовой электронике; а в последнее время они появляются в вентиляторах, где их высокая эффективность способствовала значительному снижению энергопотребления.
Они также используются для привода вакуумных машин. В одном случае изменение программы управления привело к значительному скачку скорости вращения – пример превосходной управляемости, обеспечиваемой этими двигателями.
ДвигателиBLDC также используются для вращения жестких дисков, где их надежность обеспечивает надежную работу приводов в течение длительного времени, а их энергоэффективность способствует снижению потребления энергии в той области, где это становится все более важным.
На пути к более широкому использованию в будущем
Мы можем ожидать, что в будущем двигатели BLDC будут использоваться в более широком диапазоне приложений. Например, они, вероятно, будут широко использоваться для управления сервисными роботами – небольшими роботами, которые предоставляют услуги не только в производстве, но и в других областях. Можно подумать, что шаговые двигатели больше подходят для этого типа приложений, где для точного управления позиционированием можно использовать импульсы. Но двигатели BLDC лучше подходят для управления силой.А с шаговым двигателем, чтобы удерживать такую конструкцию, как рука робота, потребуется относительно большой и непрерывный ток. Для двигателя BLDC все, что потребуется, – это ток, пропорциональный внешней силе, что обеспечивает более энергоэффективное управление. Двигатели BLDC могут также заменить простые щеточные двигатели постоянного тока в тележках для гольфа и мобильных тележках. Помимо большей эффективности, двигатели BLDC также могут обеспечивать более точное управление, что, в свою очередь, может еще больше продлить срок службы батарей.
ДвигателиBLDC также идеально подходят для дронов. Их способность обеспечивать точное управление делает их особенно подходящими для многороторных беспилотных летательных аппаратов, где положение беспилотника регулируется путем точного управления скоростью вращения каждого ротора.
На этом занятии мы увидели, как двигатели BLDC обеспечивают превосходную эффективность, управляемость и долговечность. Но тщательный и надлежащий контроль необходим для полного использования потенциала этих двигателей. На следующем занятии мы рассмотрим, как работают эти двигатели.
Список модулей
- Что такое бесщеточные двигатели постоянного тока
- Управление двигателями BLDC
- Решения Renesas для управления двигателями BLDC
переменного тока и синхронные двигатели с постоянными магнитами
* Изображение предоставлено New Energy и Fuel.com
Авторы : Стив Бистак, региональный менеджер по продажам – NE, департамент приводов переменного тока / HMI, Fuji Electric Corp. of America, и Sun Y.Ким (Шон), старший региональный менеджер, ACDR / HMI, Fuji Electric Corp of America
Большинство насосов и вентиляторов, работающих в промышленных и коммерческих целях, в настоящее время приводится в действие асинхронными двигателями переменного тока. «ACIM», что означает «асинхронный двигатель переменного тока», представляет собой асинхронный тип двигателя, который использует электрический ток для вращения ротора. Крутящий момент создается электрическим током в роторе. Электрический ток создается за счет электромагнитной индукции магнитного поля обмоток статора.В ACIM ротор всегда вращается с меньшей скоростью, чем магнитное поле. «PMSM», что означает «синхронный двигатель с постоянными магнитами», полагается на магниты, вращающие ротор, который вращается с той же скоростью, что и внутреннее вращающееся магнитное поле PMSM.
Есть несколько ключевых различий между асинхронными двигателями переменного тока и синхронными двигателями с постоянными магнитами.
Двигатели с постоянными магнитами ДОЛЖНЫ работать с приводом.
Асинхронные двигателипеременного тока могут использоваться без частотно-регулируемого привода для привода насоса или вентилятора, но часто устанавливаются с частотно-регулируемыми приводами (VFD) в насосных или вентиляционных системах, чтобы повысить эффективность системы.Синхронным двигателям с постоянными магнитами для работы требуется привод. PMSM не могут работать без привода. ЧРП необходим для точного управления скоростью PMSM в соответствии с требованиями приложения к давлению, расходу, объему и т. Д. Некоторые новые частотно-регулируемые приводы уже поставляются с опциями управления двигателем с постоянными магнитами в качестве стандартной функции, что позволяет операторам управлять двигателем с постоянными магнитами. для более эффективного управления вентилятором и / или насосом.
Двигатели с постоянными магнитами обеспечивают значительное повышение эффективности по сравнению с асинхронными двигателями переменного тока.
Эффективность полной нагрузки двигателя с постоянными магнитами выше, чем у асинхронного двигателя переменного тока. На рисунке 1 ниже показаны диапазоны эффективности между двумя стандартами асинхронных двигателей переменного тока и известными опубликованными двигателями с постоянными магнитами.
Рисунок 1 . Эффективность двигателя с постоянными магнитами на мощности частотно-регулируемого привода. ACIM на синусоиде. Двигатели ACIM теряют 0,5–1,5 балла кпд при работе с частотно-регулируемым приводом.
Важно отметить, что частотно-регулируемые приводы не повышают КПД двигателя; ЧРП помогают повысить эффективность системы в диапазонах рабочих скоростей, поскольку большинство систем не всегда работают на максимальных скоростях.Добавление частотно-регулируемого привода помогает повысить эффективность вашей системы, поскольку он может замедлять двигатель и вентилятор или насос, а не поворачивать клапан для дросселирования насоса или закрывать заслонку, чтобы блокировать поток воздуха.
Взгляните на рисунок 2, на котором сравнивается 10-сильный синхронный двигатель с постоянным магнитом 1800 об / мин и двигатель NEMA Premium, работающий с переменной нагрузкой по крутящему моменту в диапазоне скоростей от 3 до 1. Вы можете видеть, что в обоих случаях эффективность обоих типов двигателей падает. КПД двигателя NEMA Premium падает с примерно 90% до примерно 72% при 600 об / мин, а ECPM падает примерно с 94% до 83%.Хотя работа системы влияет на эффективность оборудования, было доказано, что двигатели с постоянными магнитами демонстрируют более высокий КПД по сравнению с асинхронными двигателями переменного тока.
Рисунок 2 . Сравнение относительной эффективности двигателя PMSM и ACIM с диапазоном изменения 3: 1.
Преимущества и недостатки двигателей с постоянными магнитами
Хотя асинхронные двигатели переменного тока чаще встречаются в системах с моторным приводом, они часто больше по размеру и менее эффективны, чем двигатели с постоянными магнитами.Хотя решения с двигателями с постоянными магнитами обычно имеют более высокую начальную стоимость, они могут предлагать меньший размер для более компактных механических блоков и, что более важно, более высокую эффективность.
Двигатели с постоянными магнитами обычно дороже, чем асинхронные двигатели переменного тока, и, как известно, их труднее запускать, чем асинхронные двигатели переменного тока. Однако преимущества двигателей с постоянными магнитами включают в себя более высокий КПД (как обсуждалось выше), меньшие размеры (двигатели с постоянными магнитами могут составлять до одной трети от большинства размеров двигателей переменного тока, что значительно упрощает установку и обслуживание) и способность PMSM поддерживать полный крутящий момент на низких оборотах.
Тенденция меняется
Использование PMSM в сочетании с VFD не новость; однако инженеры-конструкторы и владельцы оборудования начинают устанавливать больше двигателей с постоянными магнитами для вентиляторов и насосов из-за их меньшего размера и более высокой эффективности. До этого момента частотно-регулируемые приводы требовали специальной формулы для управления двигателем с постоянными магнитами; Сейчас на рынке доступно несколько новых частотно-регулируемых приводов, которые имеют встроенную стандартную функцию для управления двигателями с постоянными магнитами без дополнительных затрат.
По мере того, как все больше производителей частотно-регулируемых приводов начинают добавлять функции для более эффективного управления модулями управления двигателем, владельцы и операторы приобретают тенденцию к установке систем двигателей, которые работают более эффективно, в меньших корпусах и с меньшими затратами.
Типы общепромышленных двигателей| Центр энергоэффективности
Индукционный / асинхронный переменный ток
Большинство промышленных двигателей представляют собой асинхронные двигатели трехфазного переменного тока из-за их надежности и низкой стоимости.
В этом случае электрический ток в обмотке статора создает вращающееся магнитное поле, которое «индуцирует» (отсюда и название) электрический ток в роторе.Ток, индуцируемый в роторе, создает магнитное поле, которое противодействует полю статора, вызывая вращение в роторе. Асинхронный двигатель должен работать со скоростью, немного меньшей, чем синхронная, поскольку вращение с синхронной скоростью не приведет к возникновению индуцированного тока ротора.
Вот почему асинхронные двигатели называются асинхронными, потому что ротор вращается медленнее, чем вращающееся магнитное поле статора, создавая крутящий момент вокруг выходного вала.
Если ротор вращается быстрее, чем вращающееся магнитное поле статора, в статоре будет индуцироваться ток.В этом сценарии асинхронные двигатели могут действовать как генераторы.
Асинхронные двигатели недороги, потому что для их работы требуются только электромагниты в статоре и роторе. Они также надежны, потому что им не нужны коммутаторы для передачи тока на ротор, что снижает вероятность искрения и износа от трения.
Большинство промышленных предприятий используют асинхронные двигатели из-за их желаемых характеристик, таких как надежность, простота и доступность.
Асинхронный двигатель с короткозамкнутым ротором ( Википедия, )
AC синхронный
В синхронных двигателях вращение вала синхронизируется с частотой тока, подаваемого на двигатель.Статор двигателя содержит электромагниты, которые создают магнитное поле, которое вращается в соответствии с характеристиками приложенного к нему тока. Ротор содержит постоянные магниты или электромагниты, которые противодействуют магнитному полю, создаваемому в роторе, вызывая вращение вала. Ротор требует физического подключения к электроэнергии с помощью коммутатора, обычно состоящего из токопроводящей щетки, которая может изнашиваться при использовании.
Эти двигатели называются синхронными, потому что ротор вращается с той же скоростью, что и вращающееся магнитное поле статора.
Хотя синхронные двигатели переменного тока используются реже из-за более высокой стоимости, они обладают более высокой энергоэффективностью, чем асинхронные двигатели переменного тока.
Синхронные двигатели переменного тока уникальны тем, что могут использоваться для корректировки коэффициента мощности промышленного объекта.
Векторы магнитного поля синхронного двигателя ( Википедия )
DC синхронный
Двигатели постоянного тока – наименее распространенный тип двигателей, на смену которым пришли современные двигатели переменного тока.
Статор создает статическое магнитное поле, а ротор создает вращающееся магнитное поле, питаемое от коммутатора.
В результате магнитное поле ротора пытается выровняться с магнитным полем статора, которое создает крутящий момент на выходном валу.
Вместо того, чтобы использовать электромагниты для создания статического магнитного поля, двигатели постоянного тока с постоянными магнитами используют магниты для создания поля. Поскольку магнитное поле присутствует всегда, независимо от состояния питания двигателя, двигатели с постоянными магнитами могут притягивать другие близлежащие ферромагнитные материалы, создавая потенциальный риск в промышленных условиях.
Двигатели постоянного тока с постоянными магнитами также тяжелее и громоздче из-за использования магнитов в статоре.
Анимация работающего двигателя постоянного тока ( Википедия, )
IPM | Motor Technology
Характеристики двигателя IPM
Конструкция двигателя IPM (внутренний постоянный магнит)
Обычный двигатель SPM (поверхностный постоянный магнит) имеет конструкцию, в которой постоянный магнит прикреплен к поверхности ротора.Он использует только магнитный момент от магнита. С другой стороны, двигатель IPM использует сопротивление через магнитное сопротивление в дополнение к магнитному крутящему моменту, вставляя постоянный магнит в сам ротор.
Пример) Конструкция ротора двигателя SPM.IPM
IPM (внутренний постоянный магнит) Характеристики двигателя
Высокий крутящий момент и высокая эффективность
Высокий крутящий момент и высокая мощность достигаются за счет использования реактивного крутящего момента в дополнение к магнитному крутящему моменту.
Энергосберегающий режим
Он потребляет до 30% меньше энергии по сравнению с обычными двигателями SPM.
Высокоскоростное вращение
Он может реагировать на высокоскоростное вращение двигателя, управляя двумя типами крутящего момента с помощью векторного управления.
Безопасность
Поскольку постоянный магнит встроен, повышается механическая безопасность, поскольку, в отличие от SPM, магнит не отсоединяется из-за центробежной силы.
Функции векторного управления
В то время как в традиционной системе (система с проводимостью 120 градусов) ток подается в двигатель в виде прямоугольной волны, векторное управление создает напряжение, которое превращается в синусоидальную волну по направлению к положению ротора (углу магнита), поэтому становится возможным контролировать ток двигателя.
Эта функция имеет следующие преимущества.
– Возможна эффективная работа с низкой пульсацией крутящего момента.
– Имея возможность управлять током двигателя в соответствии с углом магнита, можно добиться более плавного ускорения и точной системы останова.
– Он может мгновенно реагировать на изменение скорости при колебаниях нагрузки.
– По сравнению с обычными системами, степень равномерности скорости значительно улучшается при подъеме или опускании, независимо от нагрузки.
Пример использования MLP
Что такое двигатели постоянного тока без сердечника?
Типичный щеточный электродвигатель постоянного тока состоит из внешнего статора, обычно сделанного из постоянного магнита или электромагнитных обмоток, и внутреннего ротора, сделанного из листового железа с обмотками катушки. Сегментированный коммутатор и щетки контролируют последовательность подачи питания на обмотки ротора, чтобы обеспечить непрерывное вращение.
Типичный двигатель постоянного тока состоит из внешнего статора с постоянным магнитом и внутреннего ротора, сделанных из листового железа с обмотками.Изображение предоставлено: maxon motor ag
Двигатели постоянного тока без сердечника избавляются от ламинированного стального сердечника в роторе. Вместо этого обмотки ротора намотаны перекосом или сотами, образуя самонесущий полый цилиндр или «корзину». Поскольку для поддержки обмоток нет железного сердечника, они часто скрепляются эпоксидной смолой. Статор изготовлен из редкоземельных магнитов, таких как неодим, AlNiCo (алюминий-никель-кобальт) или SmCo (самарий-кобальт), и находится внутри ротора без сердечника.
В двигателе постоянного тока без сердечника отсутствует железный сердечник в роторе. Вместо этого обмотки ротора намотаны с перекосом или в виде сот с образованием самонесущего полого цилиндра. Магнит статора находится внутри ротора без сердечника.Изображение предоставлено: maxon motor ag
Другие термины для двигателей постоянного тока без сердечника включают «воздушный сердечник», «бесшумный» и «без железа».
Щетки, используемые в двигателях постоянного тока без сердечника, могут быть изготовлены из благородного металла или графита. Щетки из драгоценных металлов (серебра, золота, платины или палладия) сочетаются с коммутаторами из драгоценных металлов.Эта конструкция имеет низкое контактное сопротивление и часто используется в слаботочных приложениях. При использовании щеток из металлокерамики и графита коллектор изготавливается из меди. Комбинация медь-графит больше подходит для приложений, требующих более высокой мощности и более высокого тока.
Двигатели постоянного тока без сердечника имеют полый и самонесущий ротор, что снижает массу и инерцию.Изображение предоставлено: Portescap
Конструкция двигателей постоянного тока без сердечника дает ряд преимуществ по сравнению с традиционными двигателями постоянного тока с железным сердечником.Во-первых, устранение железа значительно снижает массу и инерцию ротора, поэтому возможны очень высокие темпы ускорения и замедления. Отсутствие железа также означает отсутствие потерь в нем, что дает конструкциям без сердечника значительно более высокий КПД (до 90 процентов), чем у традиционных двигателей постоянного тока. Конструкция без сердечника также снижает индуктивность обмотки, поэтому искрение между щетками и коммутатором уменьшается, что увеличивает срок службы двигателя и снижает электромагнитные помехи (EMI).
Зубчатость двигателя, которая является проблемой в традиционных двигателях постоянного тока из-за магнитного взаимодействия постоянных магнитов и металлических пластин, также устраняется, поскольку в конструкции без железа нет пластин.В свою очередь, пульсация крутящего момента чрезвычайно мала, что обеспечивает очень плавное вращение двигателя с минимальной вибрацией и шумом.
Поскольку эти двигатели часто используются для высокодинамичных движений (высокое ускорение и замедление), катушки в роторе должны выдерживать высокий крутящий момент и рассеивать значительное количество тепла, выделяемого пиковыми токами. Поскольку здесь нет железного сердечника, который мог бы служить радиатором, в корпусе двигателя часто есть отверстия для принудительного воздушного охлаждения.
Двигатели постоянного токабез сердечника доступны как в цилиндрической, так и в плоской (дисковой) конфигурациях.
Изображение предоставлено: MICROMO
Компактная конструкция двигателей постоянного тока без сердечника подходит для приложений, требующих высокого отношения мощности к габаритам, с размерами двигателей обычно в диапазоне от 6 мм до 75 мм (хотя размеры меньше 1 мм. доступны) и номинальной мощностью 250 Вт или меньше. Конструкции без сердечника – особенно хорошее решение для устройств с батарейным питанием, поскольку они потребляют чрезвычайно низкий ток в условиях холостого хода.
Двигатели постоянного токабез сердечника широко используются в медицине, включая протезирование, небольшие насосы (например, инсулиновые помпы), лабораторное оборудование и рентгеновские аппараты.Их способность справляться с быстрыми динамическими перемещениями также делает их идеальными для использования в роботизированных приложениях.
Двигатель постоянного тока с постоянными магнитами – его применение, преимущества и недостатки
Двигатель постоянного тока, полюса которого сделаны из постоянных магнитов, известен как двигатель постоянного тока с постоянным магнитом (PMDC) . Магниты намагничены радиально и установлены на внутренней периферии стального цилиндрического статора. Статор двигателя служит обратным каналом для магнитного потока.Ротор имеет якорь постоянного тока с коллекторными сегментами и щетками.
Поперечный разрез двухполюсного двигателя с постоянным током постоянного тока показан на рисунке ниже.
Двигатель постоянного тока с постоянным магнитом обычно работает от источника постоянного тока напряжением 6 В, 12 В или 24 В, поступающего от батарей или выпрямителей. Взаимодействие между осевыми токонесущими проводниками ротора и магнитным потоком, создаваемым постоянным магнитом, приводит к возникновению крутящего момента.
Принципиальная схема PMDC показана ниже.
В обычном двигателе постоянного тока генерируемая или обратная ЭДС определяется уравнением, показанным ниже.
Электромагнитный момент равен
.В двигателе постоянного тока с постоянным магнитом значение магнитного потока ϕ постоянно. Следовательно, приведенное выше уравнение (1) и (2) становится
Принимая во внимание приведенную выше принципиальную схему, выражаются следующие уравнения.
Подставляя значение E из уравнения (3) в уравнение (5), получаем
Где k 1 = k ϕ и называется постоянной скоростью-напряжением или постоянной крутящего момента.Его значение зависит от количества полюсов возбуждения и проводников якоря.
Управление скоростью двигателя с постоянным постоянным током невозможно контролировать с помощью метода управления магнитным потоком, поскольку магнитный поток остается постоянным в этом типе двигателя. И скорость, и крутящий момент можно контролировать с помощью управления напряжением якоря, управления реостатом якоря и методов управления прерывателем. Эти двигатели используются там, где требуется скорость двигателя ниже базовой, поскольку они не могут работать выше базовой скорости.
Типы материалов с постоянными магнитами
В двигателях с постоянным постоянным током используются три типа материалов с постоянными магнитами.Подробная информация представлена ниже.
Алникос
Alnicos имеет низкую коэрцитивную силу намагничивания и высокую остаточную магнитную индукцию. Следовательно, он используется там, где требуется низкий ток и высокое напряжение.
Ферриты
Они используются в чувствительных к стоимости приложениях, таких как кондиционеры, компрессоры и холодильники.
Редкие земли
Редкоземельные магниты изготовлены из самариевого кобальта, неодима-железа-бора. У них высокий остаточный поток и высокая интенсивность коэрцитивного намагничивания.Редкоземельные магниты избавлены от проблем с размагничиванием из-за реакции якоря. Это дорогой материал.
Неодимовое железо-бор дешевле по сравнению с самариевым кобальтом. Но выдерживает более высокую температуру. Магниты из редкоземельных металлов используются в приложениях, чувствительных к размеру. Они используются в автомобилях, промышленных сервоприводах и в крупных промышленных двигателях.
Применение двигателя постоянного тока с постоянным магнитом
Двигатели с постоянным постоянным током используются в различных приложениях от долей до нескольких лошадиных сил.Они развиваются примерно до 200 кВт для использования в различных отраслях промышленности. Следующие приложения приведены ниже.
- Двигатели PMDC в основном используются в автомобилях для управления стеклоочистителями и омывателями, для подъема нижних окон, для привода нагнетателей обогревателей, кондиционеров и т. Д.
- Они также используются в компьютерных приводах.
- Эти типы двигателей также используются в производстве игрушек. Двигатели
- PMDC используются в электрических зубных щетках, портативных пылесосах, миксерах для пищевых продуктов.
- Используется в переносном электроинструменте, таком как сверлильные станки, кусторезы и т. Д.
Преимущества двигателя постоянного тока с постоянными магнитами
Ниже приведены преимущества двигателя с постоянным током постоянного тока.
- Они меньше по размеру.
- Для меньшего номинала Постоянный магнит снижает стоимость производства и, следовательно, двигатели с постоянным постоянным током дешевле.
- Поскольку эти двигатели не требуют обмоток возбуждения, они не имеют потерь в медной цепи возбуждения. Это увеличивает их эффективность.
Недостатки двигателя постоянного тока с постоянными магнитами
Ниже приведены недостатки двигателя с постоянным постоянным током.
- Постоянные магниты не могут создавать такую высокую плотность магнитного потока, как внешнее шунтирующее поле. Следовательно, двигатель с постоянным постоянным током имеет более низкий наведенный крутящий момент на ампер-виток тока якоря, чем параллельный двигатель того же номинала.
