
Регулирования активной и реактивной мощности синхронного генератора при подключении к сети
DOI: 10.32743/UniTech.2021.82.1-3.21-25
АННОТАЦИЯ
Регулирование активной и реактивной мощности генераторов при подключении к сети всегда было важным вопросом исследований электростанций и электрических сетей для эффективного использования энергии и стабильной работы двигателей. В повседневной жизни потребление электроэнергии в жилых домах постоянно меняется (больше ночью и меньше днем; больше летом и зимой, меньше весной и осенью), поэтому для рационального использования ресурсов и улучшения экономики необходимы мониторинг и регулирование активной мощности в реальном времени. В последнее время большинство приборов, подключенных к сети, являются индуктивными. Поэтому система питания должна загружать много реактивной мощности помимо активной. Согласно статистике, реактивная мощность, потребляемая промышленными предприятиями, необходимая асинхронному двигателю в энергосистеме, составляет 60–65 %, 20–25 % силовых трансформаторов и 10 % приходятся на воздушный электрические сети и другого оборудования [2].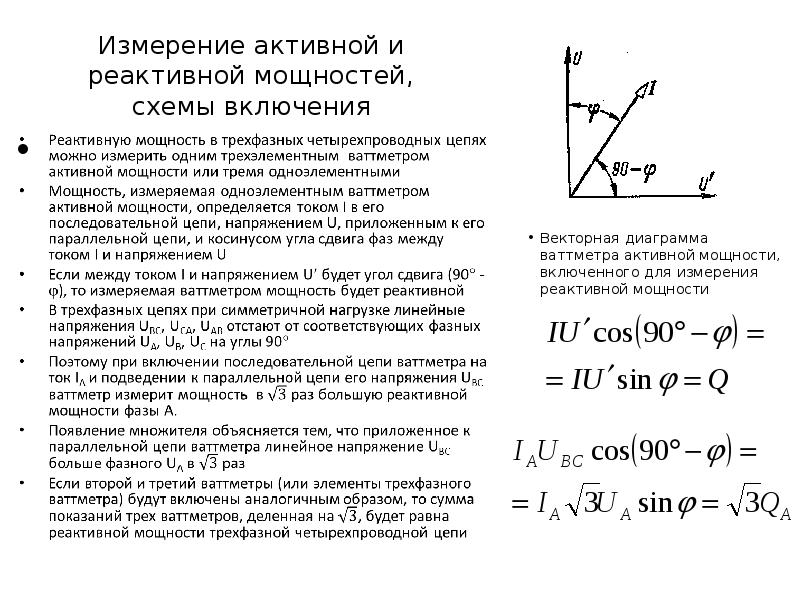
ABSTRACT
The regulation of active and reactive power of generators when connected to the grid has always been an important issue in the research of power plants and electrical networks for efficient use of energy and stable operation of motors. In everyday life, electricity consumption in residential buildings is constantly changing (more at night and less during the day; more in summer and winter, less in spring and autumn), therefore, real-time monitoring and regulation of active power is necessary for rational use of resources and improving the economy.
Ключевые слова: угол мощности, ток возбуждения, активное регулирование, регулирование реактивной мощности, статическая устойчивость.
Keywords: power angle, excitation current, active regulation, reactive power regulation, static stability.
1. Введение. В этой статье обсуждается, как отрегулировать активную и реактивную мощность после параллельного подключения генератора в основном для бесконечной электросети. Это означает, что изменение режима работы подключаемого генератора практически не может повлиять на изменение напряжения или частоты сети, где они остаются неизменными, т.е. = const и = const. Внутренний процесс анализируется с помощью векторной диаграммы или угла мощности при регулировке. Регулировка активной мощности должна изменить входную мощность первичного двигателя для изменения выходной мощности генератора в соответствии с характеристикой угла мощности. Если изменяется только ток возбуждения генератора, можно регулировать только реактивную мощность генератора.
2. При перевозбуждении выдается индуктивная реактивная мощность, а реакцией якоря является размагничивание; при слабом возбуждении генератор производит емкостную реактивную мощность и реакция якоря может усилиться (также может размагничиваться). Обычный генератор возбуждения выдает только активную мощность с коэффициентом мощности, показанным на рис. 1 [2; 8; 6; 7].
Обычный генератор возбуждения выдает только активную мощность с коэффициентом мощности, показанным на рис. 1 [2; 8; 6; 7].
2. Регулирование реактивной мощности синхронного генератора и анализ его работы. Предпосылка анализа заключается в том, что в качестве примера берем двигатель со скрытым полюсом. Эффектом насыщения и сопротивлением якоря пренебрегаем. Тогда сеть рассматривается как бесконечная, напряжение – неизменным, а частота – нормальной.
2.1. Выход без нагрузки на стабильную активную мощность. Когда генератор не выдает активную мощность, потребляемую первичным двигателем, просто компенсируются различные потери и не выводятся электромагнитные потери (без учета потерь в меди статора), поэтому угол мощности δ = 0°, электромагнитная мощность = 0, как показано на рис. 1. В это время, хотя электродвижущая сила поля , напряжение сети U могут присутствовать и есть токовый выход, это реактивный ток. Когда входная мощность первичного двигателя увеличивается, входной крутящий момент увеличивается и ( – крутящий момент без нагрузки). В это время остаточный крутящий момент () действует на вал двигателя, так что ускорение ротора, главное магнитное поле ротора () и прямая ось d опережают эквивалентное статору синтетическое магнитное поле (). Поскольку магнитное поле ограничено частотой сети, скорость вращения остается синхронной, а соответственно, и электродвижущая фаза. Величина опережает вектор напряжения на клеммах генератора на фазовый угол, поэтому δ > 0°, > 0, генератор выдает активный ток наружу, а электромагнитный момент при этом появляется соответствующий к электромагнитному моменту Когда δ увеличивается так, что соответствующий электромагнитный крутящий момент в точности равен остаточному крутящему моменту (), ротор возвращается к синхронной скорости, и генератор работает стабильно под углом δ, как показано на рисунке 1 (B) и 1 (С) [2; 6].
В это время остаточный крутящий момент () действует на вал двигателя, так что ускорение ротора, главное магнитное поле ротора () и прямая ось d опережают эквивалентное статору синтетическое магнитное поле (). Поскольку магнитное поле ограничено частотой сети, скорость вращения остается синхронной, а соответственно, и электродвижущая фаза. Величина опережает вектор напряжения на клеммах генератора на фазовый угол, поэтому δ > 0°, > 0, генератор выдает активный ток наружу, а электромагнитный момент при этом появляется соответствующий к электромагнитному моменту Когда δ увеличивается так, что соответствующий электромагнитный крутящий момент в точности равен остаточному крутящему моменту (), ротор возвращается к синхронной скорости, и генератор работает стабильно под углом δ, как показано на рисунке 1 (B) и 1 (С) [2; 6].
В это время выходная активная мощность генератора равна:
. (1)
Если это явнополюсный синхронный генератор, его угловая характеристика мощности равна:
.
Также можно видеть, что угол мощности – это угол между осью магнитного полюса ротора и осью магнитного полюса воздушного зазора в пространстве и угол между электродвижущей силой возбуждения и напряжением U во времени [1–8].
Рисунок 1. Параллельно с бесконечной электросетью синхронный генератор вырабатывает активную мощность от холостого хода до стабильной выходной мощности
2.2. Регулировка активной мощности при статической и стабильной работе синхронного генератора. Активная мощность синхронного генератора, подключенного к системе большой мощности, регулируется мощностью первичного двигателя. При увеличении мощности первичного двигателя, т.е. вращающего момента первичного двигателя (паровой или гидравлической турбины), увеличивается активная составляющая тока генератора, одновременно с этим увеличивается и угол, что понижает запас устойчивости генератора.
Векторная диаграмма генератора с невыпадающими полюсами, например, показана на рисунке 2. Текущий ток можно контролировать с помощью:
; (3)
. (4)
Объяснение. Из рисунка видно, что по мере изменения активной мощности изменяется угол δ, а затем изменяется угол , изменяется I cos, а также изменяется I sin, то есть изменяется величина реактивной мощности, а также может поменяться характер. В частности, когда активная мощность увеличивается, ток возбуждения не изменяется, а активная мощность увеличивается, I cos увеличивается. Тогда увеличивается, затем sin увеличивается, то есть δ увеличивается и уменьшается, ток якоря I увеличивается, а угол коэффициента мощности уменьшается. Следовательно, угол δ мощности фактически отражает угол кручения синтетического магнитного поля статора, и тем больше электромагнитная мощность и электромагнитный момент .
Необходимые условия. Однако входная мощность от первичного двигателя не может быть увеличена без ограничений для увеличения электромагнитной мощности генератора. Для генератора со скрытыми полюсами, когда угол мощности δ достигает 90°, электромагнитная мощность достигает максимального значения . Если входная мощность от первичного двигателя увеличивается, новый баланс не может быть установлен и скорость двигателя будет постоянно увеличиваться и терять шаг и статическую устойчивость [2; 7; 1].
Рисунок 2. Синхронный генератор поддерживает постоянным ток возбуждения для регулировки активной мощности генератора
3. Регулирование реактивной мощности и анализ работы синхронного генератора. Если генератор подключен параллельно к сети в идеальных условиях, указанных выше, при исследовании регулирования реактивной мощности генератора также можно считать, что мощность электросети достаточно велика, а напряжение электросети и частота не изменятся.
Регулирование реактивной мощности и анализ работы синхронного генератора. Если генератор подключен параллельно к сети в идеальных условиях, указанных выше, при исследовании регулирования реактивной мощности генератора также можно считать, что мощность электросети достаточно велика, а напряжение электросети и частота не изменятся.
3.1. Анализ регулирования тока возбуждения без нагрузки. Когда ток якоря равен нулю, переключатель холостого хода замкнут, как показано на рисунке 3 (A), ток возбуждения является нормальным возбуждением; когда переключатель холостого хода замкнут, генератор не будет генерировать активную или реактивную мощность.
Если выходной сигнал первичного двигателя остается неизменным, ток возбуждения увеличивается, он будет в перевозбужденном состоянии, и генератор будет посылать обратный реактивный ток, чтобы вызвать реакцию размагничивания якоря, как показано на рисунке 3 (B).
Ток возбуждения начинает уменьшаться по сравнению с нормальным возбуждением, он будет в недовозбужденном состоянии, и генератор будет посылать опережающий реактивный ток для генерации реакции намагниченного якоря, как показано на рисунке 3 (C) [2; 8; 6; 7; 1].
Рисунок 3. Фазово-векторная диаграмма регулировки тока возбуждения без нагрузки
3.2. Регулировка реактивной мощности при активной нагрузке. Когда генератор нагружен активной нагрузкой и выходная активная мощность остается неизменной, взаимосвязь между током якоря генератора и током возбуждения также может быть проанализирована с помощью векторной диаграммы электродвижущей силы. Учитывая, что напряжение постоянно, а сопротивление не учитывается.
Если тогда:
Когда ток возбуждения регулируется для изменения , ток статора генератора и коэффициент мощности также изменяются соответственно. Из рисунка 3 видно, что векторная диаграмма активного тока I cos постоянная, вектор тока статора в конце траектории представляет собой горизонтальную линию AB, перпендикулярную вектору напряжения . Из формулы (5) и = , изменение вектора в конце и вектор напряжения параллельны прямой линии CD. В соответствии с вышеуказанными условиями на рисунке 4 представлены четыре типичные векторные диаграммы.
В соответствии с вышеуказанными условиями на рисунке 4 представлены четыре типичные векторные диаграммы.
В первом случае нагрузка генератора только активной мощностью, без выхода реактивной мощности, минимальный ток статора для нормального возбуждения и cos = 1.
Во втором случае ток возбуждения увеличивается исходя из нормального возбуждения. В это время находится в сверхвозбужденном состоянии. Ток статора () ниже напряжения на клеммах.
В третьем случае ток возбуждения уменьшается на основе нормального возбуждения. В это время находится в недовозбужденном состоянии, а ток статора опережает напряжение на клеммах . В дополнение к активной мощности в сеть двигатель также передает в сеть расширенную емкостную реактивную мощность, что означает, что генератор поглощает индуктивную реактивную мощность из сети.
В четвертом случае необходимо дополнительно уменьшить ток возбуждения, электродвижущая сила еще больше уменьшится, угол мощности и ведущий коэффициент мощности cos будут продолжать увеличиваться, чтобы увеличить значение тока статора. Однако это изменение ограничено. Когда ЭДС холостого хода достигает генератор достигнет предельного состояния стабильной работы из-за предела угла мощности < 90°.
Однако это изменение ограничено. Когда ЭДС холостого хода достигает генератор достигнет предельного состояния стабильной работы из-за предела угла мощности < 90°.
Дальнейшее снижение тока возбуждения не сможет работать стабильно, а также потеряет статическую устойчивость.
Рисунок 4. Векторная диаграмма регулировки тока возбуждения при U = constant и = constant
4. Вывод. Регулирование активной мощности повлияет на изменение реактивной мощности. Когда активная мощность генератора увеличивается, уменьшение реактивной мощности будет вызвано постоянным током возбуждения и напряжением сети.
При регулировке тока возбуждения необходимо изменить реактивную мощность, хотя на значение активной мощности двигателя это не влияет, а ток якоря сначала уменьшается, затем увеличивается.
Если ток возбуждения установлен слишком низким, двигатель может потерять устойчивость и будет вынужден остановиться.
Список литературы:
- Веников В.А. Переходные электромеханические процессы в электрических системах : учебник для электроэнергет. спец. вузов. 4-е изд., перераб. и доп. – М. : Высшая школа, 1985. – 536 с.
- Князевский Б.А., Липкин Б.Ю. Электроснабжение промышленных предприятий : учебник. 2-е изд., перераб. и доп. – М. : Высшая школа, 1979. – 431 с.
- Повышение коэффициента полезного действия в результате изменения магнитодвижущей силы обмоток машин переменного тока / И.К. Исмоилов [и др.] // Проблемы современной науки и образования. – 2019. – № 11-1 (144).
- Проблемы качества электроэнергии в системах электроснабжения / З.З. Туйчиев [и др.] // Проблемы науки. – 2019. – № 10 (46).
- Электрические цепи, содержащие нелинейные элементы, и методы их расчета / Т.К. Жабборов [и др.] // Вестник науки и образования. – 2019. – № 19-2 (73).
- Юрганов А.А. Сравнение российских и зарубежных стабилизаторов режима // Электротехника, энергетика, электроника: сб. докл. науч. конф. – СПб. : СЗПИ, 2000. – С. 30–47.
- Юрганов А.А., Кожевников В.А. Регулирование возбуждения синхронных генераторов. – СПб. : Наука, 1996. – С. 61–88.
- Jicheng Li. Design and application of modern synchronous generator excitation systems / Li Jicheng, Tsinghua University, China. – Hoboken, NJ, USA : Wiley-IEEE Press, 2019.
Компенсация реактивной мощности ёмкостного характера
Capacitive reactive power compensation.
Компенсация реактивной мощности активными фильтрами.
Реактивная мощность ёмкостного характера образуется при подключении конденсаторов, протяжённых кабельных линий, при работе перевозбуждённых синхронных машин и др.
Реактивной мощности ёмкостного характера соответствует реактивный ток, который геометрически складывается с активной составляющей тока и повышает полный ток в электроустановке. Дополнительный ток вызывает дополнительные потери, загружает источники и линии электропередачи и др.
Реактивная мощность ёмкостного характера может представлять большую опасность в системах автономного электроснабжения. Это связано с тем, что генератор автономного источника способен обеспечивать вполне определенную ёмкостную нагрузку. Обычно это 12–15 % от величины полной мощности. Превышение этого предела вызывает срабатывание защиты и отключение генератора.
Реактивная мощность ёмкостного характера на присоединениях вдольтрассовых кабельных линий трубопровода перекачки углеводородов.
Для страховки от подобных ситуаций на электростанции приходится запускать дополнительные источники (дизель-генераторы, ГПА и др.). Это приводит к перерасходу топлива, расходных материалов, ресурса первичных двигателей и др.
Другой пример генерации реактивной мощности ёмкостного характера – работа пассивных фильтров ЭМС (Tuned filters).
| Пассивный фильтр ЭМС (справа) | Конденсаторы пассивного фильтра ЭМС |
При работе преобразователей частоты на долевых нагрузках конденсаторы пассивных фильтров ЭМС генерируют в сеть значительную реактивную мощность ёмкостного характера.
Активный фильтр решает задачи компенсации реактивной мощности ёмкостного и индуктивного характера сходным образом.
При работе в режиме динамической компенсации реактивной мощности требуется указать величину «целевого» коэффициента мощности. Высокое быстродействие активного фильтра позволяет устранить влияние источника реактивной мощности ёмкостного характера на коэффициент мощности всей электроустановки. В момент подачи питающего напряжения на конденсаторную батарею/кабельную линию/другой источник ёмкостной реактивной мощности активный фильтр мгновенно начинает генерировать реактивную мощность индуктивного характера для обеспечения постоянства коэффициента мощности в сети.
Предложения Инженерного центра «АРТ».
Полный комплекс работ по созданию систем динамической компенсации реактивной мощности до 9000 квар на базе активных фильтров.
Отправить запрос.
Активная и реактивная мощность генератора
Потребители, приобретая ДГУ, зачастую не задумываются о многих технических характеристиках оборудования. Касается это и такого понятия, как коэффициент мощности генератора. Параметр является важным, поскольку самым серьезным образом влияет на подачу электроэнергии.
Что представляет собой мощность генератора?
Электроприборы, подключенные к генератору, потребляют активную и реактивную мощность, которые в сумме образуют общую мощность.
- Активная мощность используется для работы всех приборов. Ее называют «полезной».
- Реактивная мощность, называемая «пустой», возникает вследствие особенности оборудования и законов физики. Мощность циркулирует между источником электроснабжения и подключенными потребителями.
Каждый генератор имеет свой коэффициент мощности, демонстрирующий количество активной мощности от полной. При выборе ДГУ для собственных нужд важно обратить внимание на этот параметр, убедившись в том, что оборудование справится с возложенными на него задачами.
Оптимальным коэффициентом мощности можно считать показатель 0.8. Это значит, что электроприборы получают 80% активной мощности от 100% общей мощности, вырабатываемой генератором.
Что такое компенсация реактивной мощности?
Чрезмерное большое количество реактивной мощности ухудшает работу всей электросети. Так, генератор потребляет слишком много топлива, быстро изнашивается и в электросети требуется задействовать провода с увеличенным сечением.
Закажите дизельный генератор в ООО «ЭК Прометей» оформив заявку онлайн или позвонив по контактному телефону:
+7(812) 748-27-22
Для снижения реактивной мощности используется компенсация. Она может быть нескольких видов:
- Индивидуальная. В данном случае задействуются конденсаторные установки для определенных потребителей.
- Групповая. Применение общей конденсаторной установки позволяет компенсировать реактивную мощность сразу для нескольких приборов.
- Централизованная. Это наиболее удобный способ компенсации, применяемый для широкого диапазона изменений мощности.
Главное преимущество компенсации реактивной мощности в том, что таким образом удается значительно сократить расходы топлива. Также это позволяет снизить нагрузку на оборудование.
Способ компенсации мощности в электросети следует подбирать грамотно. В некоторых случаях может потребоваться комплексное решение, включающее улучшение тока при помощи фильтров гармоник.
Особенно важная компенсация реактивной мощности на промышленных предприятиях. Она необходима для эффективного использования существующего электроснабжения.
HydroMuseum – Реактивная мощность
Реактивная мощность
Компенсация реактивной мощности является немаловажным фактором, позволяющим снизить нагрузки на электросеть и решить вопрос энергосбережения.
В целом результаты проводимых анализов показывают необходимость компенсации реактивной мощности как у потребителя, так и в электрических сетях, поэтому в Приказе Минпромэнерго РФ № 49 от 22.02.07 «О порядке расчета значений соотношения потребления активной и реактивной мощности для отдельных энергопринимающих устройств (групп энергопринимающих устройств) потребителей электрической энергии, применяемых для определения обязательств сторон в договорах об оказании услуг по передаче электрической энергии (договорах энергоснабжения)» оговорены предельные значения коэффициента реактивной мощности.
Протекающий реактивный ток вызывает потери мощности и энергии в линиях и трансформаторах как энергосистемы, так и потребителя, увеличение cos φ с 0,6 до 0,9 приводит к уменьшению мощности подстанций на 14 % и уменьшению их числа на 26 %.
Реактивная мощность представляет собой произведение реактивной слагающей напряжения (проекции вектора напряжения на направление, перпендикулярное направлению вектора тока) на величину тока:
Q = U · sinφ · I,
где φ — угол, между напряжением и током;
Реактивная индуктивная мощность, имея среднее значение в течение периода, равное нулю, не является полезной, так как не производит механической работы и представляет собой дополнительную нагрузку для энергосистемы, что ведет к увеличению сечений линий электропередач и мощности самих генераторов.
Компенсация реактивной мощности в электросетях позволяет уменьшить значение полной мощности.
Параметром, определяющим поглощение реактивной индуктивной мощности, является коэффициент мощности. Коэффициент мощности определяется как соотношение между активной и полной мощностью: cos φ = P/S.
Cos φ уменьшается при увеличении поглощаемой реактивной мощности. Система с низким cos φ обладает следующими недостатками:
- повышенные
потери мощности в сетях электроснабжения;
- повышенное
падение напряжения в сети;
- увеличенные
размеры генераторов, электропроводов и трансформаторов.
Реактивная мощность является фактором, снижающим качество электроэнергии, приводящим к таким отрицательным явлениям, как дополнительные потери в проводниках, вследствие увеличения тока, завышение мощности трансформаторов и сечения кабелей, отклонение напряжения сети от номинала.
Индуктивной реактивной нагрузке, создаваемой электрическими потребителями, можно противодействовать с помощью ёмкостной нагрузки, подключая точно рассчитанный конденсатор. Это позволяет снизить реактивную мощность, потребляемую от сети и называется корректировкой коэффициента мощности или компенсацией реактивной мощности.
Из вышеизложенного мы понимаем всю важность исключения или хотя бы понижения эффектов, возникающих из-за низкого коэффициента мощности. Для достижения такого результата необходимы конденсаторы.
Компенсация реактивной мощности как фактор энергосбережения
Как платить за электричество меньше, повысить КПД оборудования и более эффективно использовать электрическую энергию, – сегодня эти вопросы волнуют многих руководителей производственных предприятий и владельцев коммерческих объектов.
Из данной статьи вы подробнее узнаете, что такое компенсация реактивной мощности, как правильно рассчитать мощность для потребителей и подобрать оборудование, чтобы сократить потери электроэнергии до 65%.
Немного теории
Для оценки и расчетов цепей переменного тока используются действующие значения тока и напряжения.
Действующее значение переменного тока определяется как величина такого эквивалентного постоянного тока, который проходя через то же активное сопротивление, что и переменный ток, выделяет на нем за период то же количество тепла. Математически действующее значение определяется как среднеквадратичное за период.
Полная мощность вычисляется как произведение действующих значений тока и напряжения цепи.
S = U * I
В случае активной нагрузки фазы тока и напряжения совпадают и вся полная мощность выделяется на нагрузке. Расчеты для переменного тока соответствуют анализу цепей постоянного тока, только используются действующие значения тока и напряжения.
Полная мощность фактически показывает требования к электрической сети. Измеряется она в вольт-амперах (ВА).
Если в цепи переменного тока появляются реактивные элементы (индуктивные нагрузки и емкостные нагрузки) расчёты приходится корректировать. Реактивные элементы обладают способностью накапливать энергию и отдавать ее обратно в цепь. Появляется сдвиг фаз между током и напряжением и как следствие появляется реактивная мощность.
Реактивная мощность может быть, как положительной (для индуктивных цепей), так и отрицательной (для емкостной составляющей).
Реактивная мощность не выделяется на нагрузке, не создает полезной работы. Она накапливается на реактивных элементах нагрузки (конденсаторах, катушках индуктивности), а затем возвращается обратно в питающую сеть. Возвращаясь, она увеличивает текущий по проводам ток. Этот реактивный ток, присутствуя в линиях, дополнительно нагревает их. Поэтому в любой энергосистеме стремятся уменьшить реактивную мощность до минимума.
На нагрузке остается активная мощность. Она и совершает полезную работу: приводит в движение двигатель, переходит в световую волну в лампах и др. Активная мощность – это среднее значение мгновенной мощности за период.
Полная мощность в цепях переменного тока равна квадратному корню из суммы квадратов активной и реактивной мощностей.
S = ? ( P2 + Q2)
Активная мощность вычисляется как:
P = I * U * cos ?
I и U это действующие значения тока и напряжения.
Или:
P = S * cos ?
Т.е. активная и полная мощности связаны через коэффициент – cos ?.
Коэффициент мощности – это соотношение полезной активной мощности к полной мощности, то есть cos?=P/S этот коэффициент характеризует, насколько эффективно используется электроэнергия. cos ? – это косинус угла сдвига между напряжением питающей сети и током, потребляемым нагрузкой.
При cos ? = 1 (когда фаза тока совпадает с фазой напряжения) активная мощность на нагрузке равна полной. Вся энергия питающей сети используется для полезной работы. Происходит это только на чисто активной нагрузке, без реактивной составляющей.
Попробуем рассчитать мощность, когда угол между напряжением и током составляет 90 градусов.
На графике ? равно 90 косинус фи (cos?)=0(нулю). Для простоты вычислений возьмем максимальное значение напряжения равное 1 (100%). В этот момент ток равен 0 (нулю). Соответственно их произведение, то есть мощность равны 0(нулю). И наоборот, когда ток максимальный, напряжение равно нулю. Получается, что полезная, активная мощность равна 0 (нулю).
Конечно, устройств с cos ? = 0 на практике не бывает, но промежуточных вариантов может быть множество. Например, бестрансформаторный блок питания, приведенный в качестве примера выше, имеет коэффициент мощности 0,6 – 0,7.
Значимость коэффициента мощности
Приведем простые расчеты, демонстрирующие значимость данного показателя.
Два потребителя электроэнергии с одинаковой активной (полезной) мощностью. У первого cos ? = 1,
а у второго – 0,5. Это означает, что второй потребитель потребляет от сети ток в два раза больше,
чем первый. Т.к. зависимость потерь в проводах от тока имеет квадратичный характер (P = I2 * R), то
потери на активном сопротивлении проводов во втором случае будут в 4 раза больше. Соответственно
потребуются провода большего сечения.
Высокий коэффициент мощности особенно важен для мощных нагрузок и длинных линий электропередач.
Реактивная мощность в электрических сетях продуцирует следующие негативные факторы:- Увеличение потерь в проводниках
- Нагрев проводников вызывает ускорение старения изоляции, снижение срока службы, способствует возникновению коротких замыканий
- Снижение пропускной способности энергосистемы при генерации дополнительной мощности для компенсации потерь
- Нагрев обмоток трансформаторов и снижение нагрузочной способности без видимых причин
- Перегрузка генераторов и трансформаторов.
Повышение тока из-за низкого коэффициента мощности вызывает перегрузку генераторов и трансформаторов, и, как следствие, уменьшение их срока службы вследствие превышения расчётных характеристик - Увеличение падения напряжения
Протекающий по электрическому проводнику ток вызывает падение на нем напряжения, величина которого определяется по закону Ома. Возрастание величины тока из-за низкого значения коэффициента мощности вызывает увеличение падения напряжения, что приводит к снижению напряжения на нагрузке относительно требуемого значения, и приводит к снижению мощности, поступающей на нагрузку - Повышение эффективности использования электрической энергии за счет снижения тепловых потерь на передачу электроэнергии.
- Повышение качества электроснабжения за счёт уменьшения падения напряжения в линии электропередач.
- Экономия до 30% на оплате электроэнергии. При компенсированном коэффициенте мощности нет необходимости платить за реактивную мощность. Значительное сокращение энергопотребления.
- Увеличение срока службы электрических машин. Недостаток реактивной мощности приводит к увеличению тока, что вызывает снижение срока службы электрооборудования.
- Стоимость прокладки кабеля сокращается до 30%. Оптимизация конструкции оборудования за счёт уменьшения сечения проводников позволяет снизить стоимость используемых материалов.
- Снижения тепловых потерь на передачу электроэнергии. Повышение эффективности использования электроэнергии и качества электроснабжения за счёт уменьшения падения напряжения в линии электропередач.
- Дополнительный прирост мощности системы электроснабжения. При скомпенсированном коэффициенте мощности часть избыточной энергии, высвобождающейся за счёт уменьшения потерь, может быть использована потребителем.
- Компенсация четко соответствует нагрузке
- Конденсаторная батарея может быть размещена непосредственно у нагрузки
- Конденсаторы используются только во время работы нагрузки
- Низкая стоимость установки
- Реактивная мощность полностью исключена из распределительной сети
- Простота установки
- Низкая стоимость решения
- Конденсаторная батарея может быть размещена в щите управления
- Конденсаторы используются только во время работы нагрузки
- Низкая стоимость установки
- Реактивная мощность полностью исключена из распределительной сети
- Распределительная сеть до щита питания нагружена реактивной мощностью
- Компенсация четко соответствует изменяющейся во времени нагрузке
- Конденсаторная батарея размещена рядом со щитом питания
- Более эффективное использование конденсаторов: контроллер равномерно распределяет нагрузку на конденсаторы, что увеличивает срок службы конденсаторов
- Лучшее регулирование напряжения в энергосистеме
- Конденсаторы КПС-0,40-ХХ-3, рассчитанные на работу в трехфазных сетях переменного тока 400В с номинальными емкостями до 50 кВАр
- Регуляторы на 3,5,7,14 подключаемых ступеней компенсации
- Контакторы для конденсаторов номиналами от 12,5 кВАр до 50 кВАр с катушками управления 230В и 400В
- Щиты ШМП и ВРУ с удобной внутренней конфигурацией, которые можно подобрать для любого варианта компенсации реактивной мощности.
Использование КРМ для снижения нагрузки в электросетях. Виды компенсаторов
Для уменьшения нагрузки в электрических сетях от реактивной мощности применяются компенсаторы реактивной мощности. Это может быть использование синхронного компенсатора. Данное оборудование представлено синхронным двигателем, работающим на холостом ходу. Одновременно с ним применяются системы регулировок, влияющих на эффективность оборудования. Кроме синхронного устройства, компенсация производится с помощью батарей конденсаторов. Этот вариант считается более простым и дешевым в эксплуатации.
Преимущества компенсации реактивной мощности
Снижение тепловых потерь можно рассчитать, если значение тока в законе Джоуля-Ленца выразить через соотношение для активной мощности. Получается следующая зависимость:
Потери комп./Потери нач. =( COS ? нач./ COS ? комп)?
В результате расчётов получаем следующие зависимости:
В таблице показано возможное уменьшение тепловых потерь
| COS ? начальнй | COS ? компенсированный | |||
|---|---|---|---|---|
| 0,85 | 0,90 | 0,95 | 1,00 | |
| 0,50 | 65,40% | 69,14% | 72,30% | 75,00% |
| 0,55 | 58,13% | 62,65% | 66,48% | 69,75% |
| 0,60 | 50,17% | 55,56% | 60,11% | 64,00% |
| 0,65 | 41,52% | 47,84% | 53,19% | 57,75% |
| 0,7 | 32,18% | 39,51% | 45,71% | 51,00% |
| 0,75 | 22,15% | 30,59% | 37,67% | 43,75% |
| 0,80 | 11,42% | 20,99% | 29,09% | 36,00% |
| 0,85 | – | 10,80% | 19,94% | 27,75% |
| 0,90 | – | – | 10,25% | 19,00% |
| 0,95 | – | – | – | 9,75% |
В процессе передачи электроэнергии на расстоянии ток вынужден преодолевать сопротивление (R) проводов, что вызывает падение напряжения в линии. Падения напряжения можно определить по закону Ома. Оно равно произведению величины тока на сопротивление. Если выразить величину тока через активную мощность, то в конце преобразований получим следующее выражение:
?U=?Uкомп./?Uнач.* COS ? нач./ COS ? комп
В таблице показано возможное уменьшение падения напряжения
| COS ? начальнй | COS ? компенсированный | |||
|---|---|---|---|---|
| 0,85 | 0,90 | 0,95 | 1,00 | |
| 0,50 | 41,18% | 44,44% | 47,37% | 50,00% |
| 0,55 | 35,29% | 38,89% | 42,11% | 45,00% |
| 0,60 | 29,41% | 33,33% | 36,84% | 40,00% |
| 0,65 | 23,53% | 27,78% | 31,58% | 35,00% |
| 0,7 | 17,65% | 22,22% | 26,32% | 30,00% |
| 0,75 | 11,76% | 16,67% | 21,05% | 25,00% |
| 0,80 | 5,88% | 11,11% | 15,76% | 20,00% |
| 0,85 | – | 5,56% | 10,53% | 15,00% |
| 0,90 | – | – | 5,26% | 10,00% |
| 0,95 | – | – | – | 5,00% |
Как выбрать оборудование для компенсации реактивной мощности
Оптимальный выбор оборудования для коррекции коэффициента мощности будет зависеть от типа имеющихся нагрузок и режимов их работы.
Если загрузка оборудования мало подвержена колебаниям, т.е. она почти постоянна, то выгоднее всего использовать индивидуальную компенсацию реактивной мощности. В этом случае конденсатор включается и выключается вместе с относящейся к нему нагрузкой, поэтому компенсация соответствует cos ? нагрузки и синхронизирована с ее суточными колебаниями. Индивидуальная компенсация реактивной мощности наиболее эффективна, если большая часть реактивной мощности потребляется несколькими мощными нагрузками, которые работают непрерывно или длительное время.
рис.1
Индивидуальная компенсация (см. рис.1) реактивной мощности имеет следующие преимущества:
Однако во многих системах не все нагрузки задействованы одновременно, и некоторые из них работают всего несколько часов в день. В этом случае индивидуальная компенсация реактивной мощности становится более дорогой из-за необходимости установки большого количества конденсаторов. При этом основная масса конденсаторов не будет использоваться большую часть времени.
рис.2
Если в такой системе часть потребителей всегда работает, а часть стоит, периодически меняясь местами, но суммарная нагрузка получается примерно одинаковая по времени, то используют нерегулируемую групповую компенсацию реактивной мощности (см. рис. 2).
Такая конфигурация имеет следующие преимущества:
Групповая компенсация имеет и недостаток:
Если потребность в реактивной мощности сильно колеблется, целесообразно использовать батареи с автоматическим регулированием (см. рис. 3), а не конденсаторы, емкость которых постоянна. В этой системе конденсаторы устанавливаются рядом со щитом питания. Суммарная емкость батареи конденсаторов разделяется на ступени. Контроллер регистрирует текущий коэффициент мощности в сети и подключает или отключает необходимую реактивную мощность. При этом контроллер выбирает ту ступень, которая меньше всего проработала до этого момента.
рис.3
Преимущества централизованной компенсации реактивной мощности с автоматическим регулированием:
Важно обратить внимание, что распределительная сеть до щита питания нагружена реактивной мощностью. Необходим контроллер и аппарат управления ступенями, что усложняет решение, но при этом делает его более оптимальным по функционалу и стоимости.
В ассортименте компании EKF представлены все элементы компенсации реактивной мощности:
Кроме того, в компании EKF проводится сертификация сборщиков данного оборудования. Подробнее о том, как осуществить квалифицированный подбор и сборку компенсаторных установок в вашем регионе, можно уточнить по электронной почте [email protected].
Определение электрической мощности оборудования.
Если для обеспечения надежной работы электрооборудования вы пришли к выводу о необходимости приобретения электрогенератора (миниэлектростанции), стабилизатора напряжения или источника бесперебойного питания (UPS), перво-наперво вам необходимо рассчитать мощность нагрузки, то есть суммарной мощности одновременно включаемого оборудования (потребителей).
При этом не сведущим в электротехнике людям порой довольно сложно разобраться в указанных на оборудовании различных числах, измеряемых в Вт или ВА, и каком-то cosφ. Обозначают эти величины полную и полезную мощность, которые связаны между собой посредством cosφ.
Определение электрической мощности потребителей заключается в расчете общей полной (суммарной) электрической мощности всего подключаемого электрооборудования. Единицей измерения полной мощности выступает вольт-ампер (ВА, VA). Поскольку основная часть потребители электроэнергии является устройствами переменного тока, то для подсчета их полной мощности используется концепция реактивной и активной мощности, которая в силу малости эффектов не актуальна для использующего постоянный ток электрооборудования. Так же не следует забывать, что в момент включения оборудования с электродвигателем потребляемая мощность будет в несколько раз превышать указанное в технических характеристиках значение по причине возникновения пусковых (пиковых) токов.
Принципиальное различие между активной и реактивной мощностью заключается в том, что в первом случае практически вся потребляемая электроэнергия используется на выполнение полезной работы, во втором случае часть потребляемой электроэнергии расходуется на создание электромагнитных полей, не связанных с выполнением полезной работы.
Активная мощность P (active power, true power, real power) потребляется электросопротивлением устройства, поэтому употребляются также названия резистивная или омическая, и преобразуется в полезную световую, тепловую, механическую и другие виды энергии. Активная нагрузка – это осветительные и электронагревательные приборы: лампы накаливания, теплые полы, утюги, электрочайники, электроплиты и т.д. Единицей измерения активной мощности является ватт (Вт, W).
Коэффициент перевода Вт в ВА в данном случае можно считать равным единице, то есть общую мощность потребителей этого типа определяют суммированием паспортных значений в ваттах. То есть, если, например, необходимо учитывать одновременную работу освещения из четырех ламп накаливания по 60 Вт и электроконвектора паспортной мощностью в 2 кВт выполняем простую операцию: 60 х 4 + 2000 = 2240 Вт или практически 2240 ВА.
Реактивная мощность Q (reactive power) – это понятие обозначает ту часть электроэнергии (реактивная составляющая), которая расходуется на создания переменных электромагнитных полей, возникающих при переходных процессах в оборудовании, имеющем в своем составе индуктивные и/или емкостные составляющие (катушки индуктивности, конденсаторы и т.п.).
Реактивная мощность неизбежна при работе электродвигателей, трансформаторов и, в то же время, она не выполняет полезной работы, но создает дополнительную нагрузку на электросеть. Единицей измерения реактивной мощности является вольт-ампер реактивной мощности (ВАр, VAr).
Как правило, в технических характеристиках электрооборудования с реактивной мощностью (холодильники, микроволновые печи, стиральные машины, кондиционеры, люминесцентные лампы, электроинструменты, сварочные аппараты и т.д.) указывается его активная мощность в Вт и cosφ – коэффициент мощности (power factor, PF). Значение cosφ указывает на ту часть потребляемой электроэнергии, которая преобразуется в активную мощность (при cosφ = 0,6, например, 60% «уйдет» на выполнение полезной работы, а оставшиеся 40% составят реактивную мощность). То есть, если в техническом паспорте холодильника указана мощность 875 Вт и cosφ = 0.7, то его полная мощность будет равна 875/0.7 = 1250 ВА.
Пусковые токи. Помимо активной и реактивной мощности, для оборудования, имеющего в своей конструкции электродвигатель, необходимо принимать во внимание возникающие при его запуске пусковые или пиковые токи, в несколько раз превышающие номинальное значение. Несмотря на кратковременность (от долей до нескольких секунд), они оказывают существенное влияние на работу миниэлектростанций (электрогенераторов), стабилизаторов и источников бесперебойного питания.
Многие производители игнорируют этот параметр в технических характеристиках выпускаемого оборудования и его приходиться уточнять у консультанта при покупке или в сервисном центре. Измерить значение пускового тока бытовым прибором не представляется возможным, поэтому, в крайнем случае, можно использовать усредненные значения коэффициентов пускового тока (ввиду приблизительности эти величины могут не отражать реальной ситуации).
| Оборудование | Коэффициент пускового тока | Оборудование | Коэффициент пускового тока |
| Телевизор, пылесос | 1 | Циркулярная пила | 2 |
| Компьютер | 2 | Электропила | 2 |
| СВЧ-печь | 2 | Электрорубанок | 2 |
| Стиральная машина | 3 | Болгарка (УШМ) | 2 |
| Кондиционер | 5 | Дрель/Перфоратор | 3 |
| Холодильник | 4 | Бетономешалка | 3 |
| Электромясорубка | 7 | Погружной насос | 7 |
То есть для окончательного определения электрической мощности такого потребителя, как упоминавшийся выше холодильник, необходимо полученное ранее значение 1250 ВА умножить на коэффициент пускового тока и наши скромные паспортные 875 Вт превратятся в 1250 х 4 = 5000 ВА.
Различия в коэффициентах пускового тока обусловлены условиями работы электродвигателя после момента включения. Так двигатель холодильника или погружного насоса помимо выхода на рабочие обороты должен сразу после включения начать качать соответственно хладагент или воду, поэтому сопротивление движению изначально максимально. А у дрели или пылесоса за счет холостого хода при разгоне двигателя сопротивление движению нарастает плавно.
Большие пусковые токи при включении имеют и лампы накаливания, поскольку сопротивление холодной спирали в несколько раз ниже, чем раскаленной. Коэффициент пускового тока в этом случае может равняться 5 – 13, но ввиду кратковременности (0.05 – 0.30 секунд) его можно не учитывать для нескольких ламп, но на производстве, где их количество может достигать сотен, пренебречь возникающими скачками тока уже не удастся. Для люминесцентных ламп с электронным поджигом коэффициент пускового тока равен 1.1 – 2.0.
Пример расчета реактивной мощности трансформатора
В данном примере нужно будет определить реактивную мощность трансформатора при холостом ходе и при коэффициенте загрузки β=0,5.
Пример
Определить реактивную мощность трансформатора типа ТМЗ-1000-10/0,4 при холостом ходе и при коэффициенте загрузки β=0,5.
Исходные данные:
Технические характеристики трансформатора принимаем, согласно таблицы 2.110 [Л1., с.221] (ГОСТ 16555-75 (действующий)), также данные технические характеристики можете принимать из каталога завода-изготовителя:
- I% = 1,2% — ток холостого хода, %;
- Uк% = 5,5% — напряжение КЗ, %.
- Sн = 1000 кВА – номинальная полная мощность трансформатора, кВА.
Решение
1. Определяем реактивную мощность трансформатора при холостом ходе по выражению 17 [Л2, с.26]:
2. Определим реактивную мощность, зависящую от нагрузки по выражению 18 [Л2, с.27] для номинальной нагрузки:
3. Определяем полную реактивную мощность по выражению 19 [Л2, с.28] для номинальной нагрузки:
4. Определим полную реактивную мощность при загрузке трансформатора на 50% (β=0,5) по выражению 19 [Л2, с.28]:
Как видно из результатов расчетов, реактивная мощность трансформатора состоит из двух частей — реактивной мощности холостого хода Q0, не зависящей от нагрузки, и реактивной мощности рассеяния Qp, зависящей от тока нагрузки. В результате при уменьшении нагрузки трансформатора от номинальной до холостого хода реактивная мощность уменьшается от 100 примерно до 10%.
Читать еще: «Выбор устройства компенсации реактивной мощности».
Литература:
- Справочник по проектированию электроснабжению. Ю.Г. Барыбина. 1990 г.
- Реактивная мощность (2-е издание) Минин Г.П. 1978 г.
Всего наилучшего! До новых встреч на сайте Raschet.info.
Поделиться в социальных сетях
Благодарность:
Если вы нашли ответ на свой вопрос и у вас есть желание отблагодарить автора статьи за его труд, можете воспользоваться платформой для перевода средств «WebMoney Funding» и «PayPal».
Данный проект поддерживается и развивается исключительно на средства от добровольных пожертвований.
Проявив лояльность к сайту, Вы можете перечислить любую сумму денег, тем самым вы поможете улучшить данный сайт, повысить регулярность появления новых интересных статей и оплатить регулярные расходы, такие как: оплата хостинга, доменного имени, SSL-сертификата, зарплата нашим авторам.
Управление реактивной мощностью и контроль напряжения во избежание отключения электроэнергии
Что такое реактивная мощность?
В системе переменного тока (AC) мощность состоит из двух компонентов: активной и реактивной мощности. Полезная работа выполняется за счет активной мощности, в то время как реактивная мощность улучшает стабильность напряжения и предотвращает падение напряжения. Явление реактивной мощности можно объяснить с помощью приведенного ниже «треугольника мощности».
Предположим, что полная мощность S, передаваемая питающим устройством, имеет разность фаз Ф между формами волны напряжения и тока.Если он разделен на две взаимно перпендикулярные составляющие, то его горизонтальная составляющая вдоль основания треугольника мощности называется активной мощностью, P (= S CosФ), а его вертикальная составляющая вдоль перпендикуляра называется реактивной мощностью, Q (= S SinФ). Где, Ф = tan- | (Q / P).
Следующие отношения могут быть показаны с помощью «Треугольника мощности».
S = P + j Q = √ (P 2 + Q 2 ) X e jФ
Обычно сеть энергосистемы имеет широкий спектр активных и реактивных нагрузок.Следовательно, его комбинированный коэффициент мощности варьируется от запаздывающего до опережающего на единицу. Таким образом, производство и потребление активной и реактивной составляющих полной мощности зависят от характера нагрузки.
Индуктивная нагрузка потребляет реактивную мощность, в то время как емкостная нагрузка генерирует ее с их запаздывающим и опережающим коэффициентами мощности соответственно.
Количество реактивной мощности зависит от сдвига фаз между волной напряжения и волны тока. Резистивная нагрузка потребляет только активную мощность при единичном коэффициенте мощности.
Сценарий активной и реактивной мощности в чистой резистивной, индуктивной и емкостной нагрузке представлен в таблице 1.
Физическая аналогия для реактивной мощности
Достаточно точная аналогия для реактивной мощности – это процесс заполнения водой бак башни с водой – по ведру за раз.
Эта аналогия основана на том факте, что «полезная работа в энергосистеме осуществляется за счет активной мощности, в то время как реактивная мощность поддерживает напряжение».
Когда вы несете ведро с водой вверх по лестнице, у вас есть ведро и вода, когда вы спускаетесь вниз, после того, как вы выливаете воду наверх, у вас есть пустое ведро.В этом случае пустое ведро – это помощник в работе, а перенос воды – желаемая работа. При подъеме по лестнице вам понадобится пустое ведро (реактивная мощность) и вода (активная мощность), а при спуске – пустое ведро (реактивная мощность). Здесь роль реактивной мощности (помощника) выполняет пустое ведро, а роль активной мощности – вода.
Другая аналогия с реактивной мощностью говорит о том, что «Реактивная мощность – это пена на пиве» здесь довольно хорошо, потому что место в стакане занято бесполезной пеной, оставляя меньше места для настоящего пива.
Источники реактивной мощности
Источники компенсации реактивной мощности классифицируются как:
- Статическая компенсация идеально подходит для срабатывания в течение секунд и минут, например, шунтирующего конденсатора, шунтирующего реактора и переключателя ответвлений.
• Динамическая компенсация идеально подходит для мгновенного отклика, например, синхронный конденсатор, генераторы и РПН.
Он далее классифицируется как
• Динамическая компенсация шунта
• Динамическая последовательная компенсация
Резерв реактивной мощности (RPR)
RPR – это резервная реактивная способность, доступная в системе для помощи в регулировании напряжения.
Во время непредвиденных обстоятельств, таких как отключение линии электропередачи или внезапное изменение спроса на реактивную мощность, эта возможность уравновесит предложение и спрос на реактивную мощность.
Это помогает поддерживать стабильное напряжение, безопасность основной системы электроснабжения, надежную работу системы от кратковременной и долговременной нестабильности и падения напряжения.
Оборудование, которое может поддерживать RPR, – это синхронные конденсаторы, «запасные шунтирующие конденсаторы», «запасные шунтирующие реакторы» и статические компенсаторы переменного тока.
Реактивная мощность, подаваемая генератором, является эффективным источником RPR по следующим причинам:
- Его превосходные характеристики при низком напряжении по сравнению со статическими реактивными устройствами
• Быстрый отклик системы возбуждения
• Большой реактивный диапазон.
Важность реактивной мощности
Регулируя реактивную мощность, можно контролировать следующие параметры энергосистемы:
- Использование активной мощности
• Стабильность напряжения
• Коэффициент мощности
• Эффективность системы
• Стоимость энергии
• Качество электроэнергии
Использование реактивной мощности при эксплуатации
При передаче электроэнергии на большие расстояния возникают дополнительные потери реактивной мощности из-за большого реактивного сопротивления высоковольтной системы передачи.Чтобы избежать чрезмерной передачи реактивной мощности, генерация и потребление реактивной мощности должны быть как можно ближе друг к другу, в противном случае это приведет к неправильному профилю напряжения.
Линии электропередачи, трансформаторы, асинхронные двигатели, печи, реакторы, дроссели, пускорегулирующие аппараты потребляют реактивную мощность, и ее передача сильно локализована, поэтому реактивная мощность обеспечивается некоторыми локализованными источниками. Для нагрузок LT им можно управлять с помощью «интеллектуального реле контроля коэффициента мощности» (IPFC).
Система возбуждения синхронного генератора позволяет регулировать подачу и спрос реактивной мощности на желаемый уровень напряжения. У генераторов также есть кривые мощности, которые определяют комбинацию выходной активной и реактивной мощности.
Снижение потерь мощности за счет регулирования реактивной мощности
Вместо изменения уровня напряжения можно уменьшить потери мощности и энергии за счет регулирования реактивной мощности.
Активные потери мощности ΔP и падение напряжения ΔV могут быть получены из следующих уравнений:
ΔP = (P 2 + Q 2 ) x R / V 2
ΔV = √ [3x (P2 + Q2 )] x R / V
Где: V – напряжение системы,
R – сопротивление цепи
Приведенные выше соотношения указывают на потери активной мощности ΔP и падение напряжения ΔV в зависимости от передачи реактивной мощности Q.Следовательно, для снижения потерь мощности можно использовать распределенные / местные источники реактивной мощности, такие как шунтирующие конденсаторы для индуктивной нагрузки или шунтирующие реакторы для емкостной нагрузки.
Пределы передачи мощности
Импедансная нагрузка или SIL линии передачи – это нагрузка линии передачи в МВт, при которой возникает естественный баланс реактивной мощности.
Линия с нагрузкой 1.0SIL будет иметь ровный профиль напряжения (одинаковое напряжение от отправляющего до принимающего конца), с одинаковым током в фазе с напряжением вдоль линии.Реактивная мощность в линии из-за заряда шунтирующей емкости будет точно равна активной мощности, потребляемой последовательными потерями индуктивности. Приблизительные значения SIL 1,0 приведены в соседней таблице.
Факторы ограничения передачи мощности
Есть три важных фактора, которые ограничивают передачу энергии.
- Температурный предел
• Предел напряжения
• Предел стабильности
Явление нестабильности напряжения, падения напряжения и отключений
Нестабильность напряжения
Система переходит в состояние нестабильности напряжения, когда потребность в реактивной мощности становится больше, чем предложение.Это может произойти из-за –
- Увеличение нагрузки / спроса,
• Постепенное и неконтролируемое падение напряжения.
• Дефицит реактивной мощности из-за перетока активной и реактивной мощности из индуктивного сопротивления системы передачи.
Явление коллапса напряжения
Процесс, при котором последовательность событий, связанных с нестабильностью напряжения, приводит к потере напряжения в значительной части системы, называется коллапсом напряжения.
Явление падения напряжения возникает, когда потребность в реактивной мощности увеличивается пропорционально активной мощности.В этот момент полностью загруженная линия передачи генерирует дополнительную индуктивную реактивную мощность. Таким образом, емкостной реактивной мощности от местных источников становится недостаточно. Следовательно, реактивная мощность должна быть доставлена из более отдаленных мест, как следствие, передача большей реактивной мощности по линиям будет еще больше увеличивать падение напряжения на стороне потребителя. Местное регулирование напряжения с помощью автотрансформаторов обеспечивает большую реактивную мощность, а это, в свою очередь, увеличивает дальнейшие падения напряжения в линиях.В один момент этот процесс может пойти лавинообразно, тем самым снизив напряжение до нуля.
Тем временем большинство генераторов на электростанциях отключатся из-за недопустимо низкого напряжения, что, конечно, ухудшит ситуацию.
Возможный сценарий падения напряжения
Возможный сценарий падения напряжения приведен ниже.
- Энергоблоки возле центров нагрузки не работают.
• Сильно нагруженные линии с низкими запасами реактивной мощности (RPR).
• Отключение сильно нагруженной линии вызывает увеличение нагрузки по сравнению с другими линиями и потерю реактивной мощности и напряжения.
• Потребление нагрузки временно снизится для стабилизации. Регуляторы напряжения будут восстанавливать напряжения генератора, но увеличение потока реактивной мощности снизит напряжения на стороне потребителя или где-либо еще.
• Под кривой мощности генераторы будут достигать пределов Var.
Отключения в энергосистеме
В энергосистеме происходит падение напряжения, если равновесные напряжения после возмущений ниже допустимых пределов.Это падение напряжения может быть преобразовано в полное или частичное отключение электроэнергии. Отключение электроэнергии в электрической системе означает, что вся система выходит из строя. Это происходит по нескольким причинам.
Перегрузка генераторов и линий электропередачи создает дефицит реактивной мощности, что приводит к падению напряжения, а результирующее каскадное отключение может вызвать отключение электроэнергии.
Одним из таких примеров является потеря генерации, например отключение электростанции приводит к перегрузке и понижению частоты по сравнению с другой электростанцией.Это может привести к дальнейшей потере других генераторов.
Другой пример, узкие места в линиях электропередачи, отключение других перегруженных линий электропередач, приводит к каскадным отключениям. Наконец, в энергосистеме происходит коллапс напряжения из-за высокого импеданса в ослабленной сети.
Как правило, одно начальное незначительное событие приводит ко второму событию, третьему и так далее. Из-за повышенных нагрузок на систему она окончательно разрушается и приводит к отключению электроэнергии.
Компенсация реактивной мощности
Для компенсации реактивной мощности используются технологии гибкой системы передачи переменного тока (FACTS).Он классифицируется как динамическая компенсация шунта и последовательная компенсация.
Динамическая компенсация шунта
Динамическая компенсация шунта позволяет автоматически поддерживать уровень напряжения в определенной области энергосистемы. Уровень напряжения является непосредственным отображением баланса реактивной мощности – слишком высокое напряжение означает избыток реактивной мощности и наоборот. Динамический шунтирующий компенсатор автоматически и мгновенно регулирует выходную реактивную мощность плавно по сравнению с опорным уровнем напряжения.
Повышает стабильность переходных процессов за счет быстрого обнаружения и автоматической настройки выхода в ответ на системные события.
В настоящее время на рынке коммерчески доступны два типа технологий динамической компенсации шунта: статический (невращающийся) вариатор (SVC) и статический (невращающийся) компенсатор (STATCOM).
SVC состоит из реакторов и конденсаторов и управляется тиристорами. Для автоматического обеспечения стабильности напряжения и переходных процессов он измеряет фактическое напряжение и автоматически подает реактивную мощность в систему через конденсатор и реактор.Эта технология была принята более чем на 800 установках по всему миру.
STATCOM основан на технологии преобразователя напряжения (VSC). Сравнение с SVC показывает, что конденсаторы и реакторы заменяются силовыми транзисторами IGBT для интеллектуального переключения полупроводников. БТИЗ работают на частоте в диапазоне кГц. Подключив конденсаторы постоянного тока к одной стороне преобразователя, STATCOM может изменять свой выходной сигнал по величине, частоте и фазовому углу, чтобы обеспечить стабильность напряжения и переходных процессов.Эта технология была принята примерно на 20 установках по всему миру.
Компенсация серии
Компенсация серииувеличивает пропускную способность и улучшает стабильность энергосистемы. Поскольку сама линия передачи потребляет реактивную мощность, поскольку она передает активную мощность. Это означает, что система трансмиссии не работает оптимальным образом. За счет добавления в систему передачи технологии последовательной компенсации пропускная способность резко увеличивается, поскольку конденсаторы будут вырабатывать (емкостную) реактивную мощность.Более того, это саморегулирующийся феномен; по мере передачи большего тока энергосистема будет потреблять больше реактивной мощности, а конденсаторы также автоматически будут производить больше реактивной мощности. В результате линия передачи используется более эффективно, и более активная мощность может достигать потребителей существующей инфраструктуры. Последовательная компенсация поддерживает напряжение, так как в противном случае длинные линии видят спадающий профиль напряжения вдоль линии.
Проблемы управления напряжением и связанной с ним безопасности
Было проведено много исследований для повышения надежности системы, но все же некоторые проблемы рассматриваются как предмет исследований и разработок, чтобы избежать отключений, например, Глобальная стратегия для уставки АРН , лучшие места для устройств управления Var, определение «приемлемого» запаса Var, быстрый анализ непредвиденных обстоятельств для вычисления Var.
Несмотря на то, что были разработаны «реле минимального напряжения», в системе нет реле, которые бы непосредственно определяли проблему, заключающуюся в том, что напряжение вот-вот упадет.
Если вы хотите поделиться мыслями или отзывами, пожалуйста, оставьте комментарий ниже.
РЕАКТИВНАЯ МОЩНОСТЬ – прикладное промышленное электричество
Рисунок 6.1 Чисто резистивная цепь переменного тока: напряжение и ток резистора совпадают по фазе.Если бы мы изобразили ток и напряжение для очень простой цепи переменного тока, состоящей из источника и резистора (рисунок выше), это выглядело бы примерно так: (рисунок ниже)
Рисунок 6.2 Напряжение и ток «синфазны» для резистивной цепи.Поскольку резистор просто и напрямую сопротивляется протеканию тока во все периоды времени, форма волны падения напряжения на резисторе точно совпадает по фазе с формой волны тока через него. Мы можем посмотреть в любой момент времени вдоль горизонтальной оси графика и сравнить эти значения тока и напряжения друг с другом (любой «снимок», показывающий значения волны, называется мгновенными значениями , что означает значения при этом момент времени ).Когда мгновенное значение тока равно нулю, мгновенное напряжение на резисторе также равно нулю. Аналогичным образом, в момент времени, когда ток через резистор находится на своем положительном пике, напряжение на резисторе также находится на своем положительном пике, и так далее. В любой момент времени на волнах закон Ома справедлив для мгновенных значений напряжения и тока.
Мы также можем рассчитать мощность, рассеиваемую этим резистором, и нанести эти значения на тот же график: (рисунок ниже)
Рисунок 6.3 Мгновенная мощность переменного тока в чисто резистивной цепи всегда положительная.Резисторы и индуктивности
Катушки индуктивности ведут себя иначе, чем резисторы. В то время как резисторы просто противодействуют протеканию тока через них (снижая напряжение, прямо пропорциональное току), катушки индуктивности противодействуют изменениям тока через них, понижая напряжение, прямо пропорциональное скорости изменения тока. В соответствии с законом Ленца , это индуцированное напряжение всегда имеет такую полярность, чтобы поддерживать ток на его текущем уровне.То есть, если ток увеличивается по величине, индуцированное напряжение будет «противодействовать» току; если ток уменьшается, полярность изменится на противоположную и «подтолкнет» ток, чтобы противодействовать уменьшению. Это противодействие изменению тока называется реактивным сопротивлением , а не сопротивлением . Выражаясь математически, соотношение между падением напряжения на катушке индуктивности и скоростью изменения тока через катушку индуктивности выглядит следующим образом:
[латекс] e = L \ frac {d_i} {d_t} [/ латекс]
Переменный ток в простой индуктивной цепи
Выражение di / dt – это выражение из расчетов, означающее скорость изменения мгновенного тока (i) во времени в амперах в секунду.Индуктивность (L) измеряется в Генри, а мгновенное напряжение (е), конечно, выражается в вольтах. Иногда вы можете встретить скорость мгновенного напряжения, выраженную как «v» вместо «e» (v = L di / dt), но это означает то же самое. Чтобы показать, что происходит с переменным током, давайте проанализируем простую цепь индуктивности:
Рисунок 6.4 Чистая индуктивная цепь: ток индуктора отстает от напряжения индуктора на 90 °.Если бы мы изобразили ток и напряжение для этой очень простой схемы, это выглядело бы примерно так:
Рисунок 6.5 Чистая индуктивная цепь, формы сигналов.Помните, что падение напряжения на катушке индуктивности является реакцией на изменение тока через нее. Следовательно, мгновенное напряжение равно нулю всякий раз, когда мгновенный ток достигает пика (нулевое изменение или наклон уровня на синусоидальной волне тока), а мгновенное напряжение находится на пике везде, где мгновенный ток имеет максимальное изменение (точки самый крутой наклон на текущей волне, где она пересекает нулевую линию).Это приводит к появлению волны напряжения, сдвинутой по фазе на 90 ° с волной тока. Глядя на график, кажется, что волна напряжения имеет «фору» по сравнению с волной тока; напряжение «опережает» ток, а ток «отстает» от напряжения.
Ток отстает от напряжения на 90 ° в чисто индуктивной цепи.
Все становится еще интереснее, когда мы строим график мощности для этой схемы:
Рисунок 6.6 В чисто индуктивной цепи мгновенная мощность может быть положительной или отрицательной.Поскольку мгновенная мощность является произведением мгновенного напряжения и мгновенного тока (p = ie), мощность равна нулю, когда мгновенный ток или напряжение равно нулю. Если мгновенный ток и напряжение положительные (над линией), мощность положительная. Как и в примере с резистором, мощность также положительна, когда мгновенный ток и напряжение отрицательны (ниже линии). Однако, поскольку волны тока и напряжения сдвинуты по фазе на 90 °, бывают моменты, когда одна из них положительна, а другая – отрицательна, что приводит к одинаково частым возникновению отрицательной мгновенной мощности .
Что такое отрицательная сила?
Но что означает отрицательная мощность ? Это означает, что катушка индуктивности возвращает мощность в цепь, в то время как положительная мощность означает, что она поглощает мощность из цепи. Поскольку положительные и отрицательные циклы мощности равны по величине и продолжительности с течением времени, индуктор возвращает обратно в цепь столько же мощности, сколько потребляет в течение полного цикла. В практическом смысле это означает, что реактивное сопротивление катушки индуктивности рассеивает нулевую полезную энергию, в отличие от сопротивления резистора, который рассеивает энергию в виде тепла.Имейте в виду, это только для идеальных катушек индуктивности, у которых нет сопротивления провода.
Реактивное сопротивление в зависимости от сопротивления
Противодействие катушки индуктивности изменению тока означает противодействие переменному току в целом, который по определению всегда изменяется по мгновенной величине и направлению. Это противодействие переменному току аналогично сопротивлению, но отличается тем, что всегда приводит к сдвигу фаз между током и напряжением и рассеивает нулевую мощность. Из-за различий он имеет другое название: реактивное сопротивление .Реактивное сопротивление по переменному току выражается в омах, как и сопротивление, за исключением того, что его математический символ – X вместо R. Чтобы быть конкретным, реактивное сопротивление, связанное с катушкой индуктивности, обычно обозначается заглавной буквой X с буквой L в качестве нижнего индекса, например это: X L .
Так как напряжение на катушках индуктивности падает пропорционально скорости изменения тока, они будут снижать большее напряжение при более быстром изменении тока и меньшее напряжение при более медленном изменении тока. Это означает, что реактивное сопротивление в Ом для любой катушки индуктивности прямо пропорционально частоте переменного тока.Точная формула для определения реактивного сопротивления выглядит следующим образом:
[латекс] X_L = 2πfL [/ латекс]
Если мы подвергнем индуктор 10 мГн воздействию частот 60, 120 и 2500 Гц, он проявит реактивные сопротивления, указанные в таблице ниже.
Реактивное сопротивление индуктора 10 мГн:
| Частота (Герцы) | Реактивное сопротивление (Ом) |
| 60 | 3.7699 |
| 120 | 7,5398 |
| 2500 | 157.0796 |
В уравнении реактивного сопротивления термин «2πf» (все в правой части, кроме L) имеет особое значение. Это количество радианов в секунду, на которое «вращается» переменный ток, если вы представите себе один цикл переменного тока, представляющий вращение полного круга. радиан – это единица измерения угла: в одном полном круге 2π радиана, так же как в полном круге 360 °.Если генератор переменного тока является двухполюсным, он будет производить один цикл на каждый полный оборот вала, что составляет каждые 2π радиан или 360 °. Если эту константу 2π умножить на частоту в герцах (циклов в секунду), результатом будет число в радианах в секунду, известное как угловая скорость системы переменного тока.
Угловая скорость в системах переменного тока
Угловая скорость может быть представлена выражением 2πf или ее собственным символом, строчной греческой буквой омега, которая похожа на нашу строчную римскую букву «w»: ω.Таким образом, формула реактивного сопротивления X L = 2πfL также может быть записана как X L = ωL.
Следует понимать, что эта «угловая скорость» является выражением того, насколько быстро колеблются колебания переменного тока, полный цикл равен 2π радиан. Это не обязательно отражает фактическую скорость вала генератора переменного тока. Если генератор имеет более двух полюсов, угловая скорость будет кратной скорости вала. По этой причине ω иногда выражается в единицах электрических радиан в секунду, а не в (простых) радианах в секунду, чтобы отличить его от механического движения.
Как бы мы ни выразили угловую скорость системы, очевидно, что она прямо пропорциональна реактивному сопротивлению в катушке индуктивности. По мере увеличения частоты (или скорости вала генератора переменного тока) в системе переменного тока индуктор будет оказывать большее сопротивление прохождению тока, и наоборот. Переменный ток в простой индуктивной цепи равен напряжению (в вольтах), деленному на индуктивное реактивное сопротивление (в омах), точно так же, как переменный или постоянный ток в простой резистивной цепи равен напряжению (в вольтах), деленному на сопротивление (в Ом).Пример схемы показан здесь:
Индуктивное сопротивление(Индуктивное сопротивление индуктора 10 мГн при 60 Гц)
[латекс] X_L = 3,7600 Ом [/ латекс]
[латекс] I_ {X_ {L}} = \ frac {E} {X} [/ latex]
[латекс] = \ frac {10 В} {3,7600 Ом} [/ латекс]
[латекс] \ mathbf {= 2.6526A} [/ латекс]
Фазовые углы
Однако нужно иметь в виду, что здесь напряжение и ток не совпадают по фазе. Как было показано ранее, напряжение имеет фазовый сдвиг + 90 ° по отношению к току.Если мы представим эти фазовые углы напряжения и тока математически в виде комплексных чисел, мы обнаружим, что сопротивление катушки индуктивности току также имеет фазовый угол:
[латекс] \ text {Opposition} = \ frac {\ text {Voltage}} {\ text {Current}} [/ latex]
[латекс] \ text {Opposition} = \ frac {10 V \ angle \ text {90 °}} {2.6526A \ angle \ text {90 °}} [/ латекс]
[латекс] \ begin {align} \ text {Opposition} = & 3.7699 \ Omega \ angle \ text {90 °} \\ \ text {или} & 0 + j3.7699 \ Omega \ end {align} [/ latex]
Математически мы говорим, что фазовый угол сопротивления катушки индуктивности току равен 90 °, что означает, что сопротивление катушки индуктивности току является положительной мнимой величиной. Этот фазовый угол реактивного противодействия току становится критически важным при анализе цепей, особенно для сложных цепей переменного тока, где реактивное сопротивление и сопротивление взаимодействуют. Будет полезно представить любую оппозицию компонента току в терминах комплексных чисел, а не скалярных величин сопротивления и реактивного сопротивления.
- Индуктивное реактивное сопротивление – это противодействие, которое индуктор предлагает переменному току из-за сдвинутого по фазе накопления и высвобождения энергии в его магнитном поле. Реактивное сопротивление обозначается заглавной буквой «X» и измеряется в омах, как и сопротивление (R).
- Индуктивное реактивное сопротивление можно рассчитать по следующей формуле: X L = 2πfL
- Угловая скорость цепи переменного тока – это еще один способ выразить ее частоту в единицах электрических радиан в секунду вместо циклов в секунду.Его символизирует строчная греческая буква «омега» или ω.
- Индуктивное реактивное сопротивление увеличивается с увеличением частоты . Другими словами, чем выше частота, тем сильнее он противодействует потоку электронов переменного тока.
Возьмем эту схему в качестве примера для работы:
Цепь индуктивности последовательного резистора: ток отстает от приложенного напряжения от 0 ° до 90 °.
Резистор будет обеспечивать сопротивление 5 Ом переменному току независимо от частоты, а катушка индуктивности – 3.Реактивное сопротивление 7699 Ом на переменный ток при 60 Гц.
Поскольку сопротивление резистора является действительным числом (5 Ом 0 ° или 5 + j0 Ом), а реактивное сопротивление катушки индуктивности – мнимым числом (3,7699 Ом ∠ 90 ° или 0 + j3,7699 Ом), комбинированный эффект двух компонентов будет противодействовать току, равному комплексной сумме двух чисел.
Это комбинированное противодействие будет векторной комбинацией сопротивления и реактивного сопротивления. Чтобы выразить это противопоставление лаконично, нам нужен более полный термин для обозначения сопротивления току, чем просто сопротивление или реактивное сопротивление.
Этот термин называется импедансом , его символ – Z, и он также выражается в омах, как сопротивление и реактивное сопротивление. В приведенном выше примере полное сопротивление цепи составляет:
Сопротивление по закону Ома
Импеданс связан с напряжением и током, как и следовало ожидать, аналогично сопротивлению в законе Ома:
На самом деле, это гораздо более полная форма закона Ома, чем то, чему учили в электронике постоянного тока (E = IR), так же как импеданс является гораздо более полным выражением сопротивления потоку тока, чем сопротивление. Любое сопротивление и любое реактивное сопротивление, отдельно или в комбинации (последовательно / параллельно), могут и должны быть представлены как единый импеданс в цепи переменного тока.
Чтобы рассчитать ток в приведенной выше схеме, нам сначала нужно задать опорный фазовый угол для источника напряжения, который обычно считается равным нулю. (Фазовые углы резистивного и индуктивного импеданса равны , всегда 0 ° и + 90 °, соответственно, независимо от заданных фазовых углов для напряжения или тока).
Как и в чисто индуктивной схеме, волна тока отстает от волны напряжения (источника), хотя на этот раз отставание не так велико: всего 37,016 ° вместо полных 90 °, как в случае чисто индуктивного схема.
Ток отстает от напряжения в последовательной цепи L-R.
Для резистора и катушки индуктивности соотношение фаз между напряжением и током не изменилось.Напряжение на резисторе синфазно (сдвиг 0 °) с током через него, а напряжение на катушке индуктивности на + 90 ° не совпадает по фазе с током, проходящим через него. Мы можем проверить это математически:
Напряжение на резисторе имеет тот же фазовый угол, что и ток через него, что говорит нам о том, что E и I находятся в фазе (только для резистора).
Напряжение на катушке индуктивности имеет фазовый угол 52.984 °, в то время как ток через катушку индуктивности имеет фазовый угол -37,016 °, разница между ними составляет ровно 90 °. Это говорит нам о том, что E и I все еще не совпадают по фазе на 90 ° (только для катушки индуктивности).
Используйте закон Кирхгофа о напряжении
Мы также можем математически доказать, что эти комплексные значения в сумме составляют общее напряжение, как и предсказывает закон Кирхгофа:
Давайте возьмем те же компоненты для нашей схемы последовательного примера и подключим их параллельно:
Рисунок 6.7 Параллельная цепь R-L.Поскольку источник питания имеет ту же частоту, что и схема последовательного примера, а резистор и катушка индуктивности имеют одинаковые значения сопротивления и индуктивности, соответственно, они также должны иметь одинаковые значения импеданса. Итак, мы можем начать нашу таблицу анализа с тех же «заданных» значений:
Таблица 6.2 Таблица анализа импеданса 1Единственная разница в нашей методике анализа на этот раз состоит в том, что мы будем применять правила для параллельных цепей вместо правил для последовательных цепей.Принцип такой же, как и для DC. Мы знаем, что напряжение распределяется равномерно между всеми компонентами в параллельной цепи, поэтому мы можем передать значение общего напряжения (10 вольт 0 °) на все столбцы компонентов:
Таблица 6.3. Таблица анализа импеданса 2Теперь мы можем применить закон Ома (I = E / Z) по вертикали к двум столбцам таблицы, рассчитав ток через резистор и ток через катушку индуктивности:
Таблица 6.4 Таблица анализа импеданса 3Как и в случае цепей постоянного тока, токи ответвления в параллельной цепи переменного тока складываются, чтобы сформировать общий ток (Закон Кирхгофа по току по-прежнему остается верным для переменного тока, как и для постоянного тока):
Таблица 6.5 Таблица анализа импеданса 4Наконец, общий импеданс можно рассчитать с помощью закона Ома (Z = E / I) по вертикали в столбце «Всего». Между прочим, параллельный импеданс также можно рассчитать, используя обратную формулу, идентичную той, которая используется при вычислении параллельных сопротивлений.
[латекс] \ tag {6.1} Z_ {parallel} = \ frac {1} {\ frac {1} {Z_1} + \ frac {1} {Z_2} + \ dots \ frac {1} {Z_n}} [ / латекс]
Единственная проблема с использованием этой формулы заключается в том, что она обычно требует большого количества нажатий клавиш калькулятора.И если вы полны решимости использовать формулу, подобную этой «от руки», будьте готовы к очень большому объему работы! Но, как и в случае с цепями постоянного тока, у нас часто есть несколько вариантов расчета величин в наших таблицах анализа, и этот пример ничем не отличается. Независимо от того, каким способом вы рассчитываете полное сопротивление (закон Ома или обратная формула), вы получите одно и то же значение:
Таблица 6.6 Таблица анализа импеданса 5- Импедансом (Z) управляют так же, как и сопротивлением (R) при анализе параллельной цепи: параллельные импедансы уменьшаются, образуя общий импеданс, с использованием обратной формулы.Только обязательно выполняйте все вычисления в сложной (не скалярной) форме!
[латекс] Z_ {parallel} = \ frac {1} {(\ frac {1} {Z1} + \ frac {1} {Z2} +… \ Frac {1} {Zn})} [/ латекс]
- Закон Ома для цепей переменного тока:
[латекс] E = {I} {Z} [/ латекс]; [латекс] I = \ frac {E} {Z} [/ latex]; [латекс] Z = \ frac {E} {I} [/ latex]
- Когда резисторы и катушки индуктивности смешаны вместе в параллельных цепях (так же, как в последовательных цепях), общий импеданс будет иметь фазовый угол где-то между 0 ° и + 90 °.Ток в цепи будет иметь фазовый угол где-то между 0 ° и -90 °.
- Параллельные цепи переменного тока обладают теми же фундаментальными свойствами, что и параллельные цепи постоянного тока: напряжение равномерно по всей цепи, токи ответвления складываются, чтобы сформировать общий ток, а импедансы уменьшаются (по обратной формуле), чтобы сформировать общий импеданс.
В идеальном случае индуктор действует как чисто реактивное устройство. То есть его противодействие переменному току строго основано на индуктивной реакции на изменения тока, а не на трении электронов, как в случае с резистивными компонентами.Однако индукторы не так чисты в своем реактивном поведении. Начнем с того, что они сделаны из проволоки, и мы знаем, что все проволоки обладают некоторой измеримой величиной сопротивления (кроме сверхпроводящей проволоки). Это встроенное сопротивление действует так, как если бы оно было подключено последовательно с идеальной индуктивностью катушки, например:
Рисунок 6.8 Катушка индуктивности Эквивалентная схема реальной катушки индуктивности.
Следовательно, полное сопротивление любой реальной катушки индуктивности всегда будет представлять собой сложную комбинацию сопротивления и индуктивного реактивного сопротивления.
Эту проблему усугубляет то, что называется скин-эффектом , который представляет собой тенденцию переменного тока проходить через внешние области поперечного сечения проводника, а не через середину. Когда электроны движутся в одном направлении (постоянный ток), они используют для движения всю площадь поперечного сечения проводника. С другой стороны, электроны, меняющие направление потока, стремятся избежать прохождения через самую середину проводника, ограничивая доступную эффективную площадь поперечного сечения. Скин-эффект становится более выраженным с увеличением частоты.
Кроме того, переменное магнитное поле индуктора, питаемого переменным током, может излучаться в космос как часть электромагнитной волны, особенно если переменный ток имеет высокую частоту. Эта излучаемая энергия не возвращается к катушке индуктивности и поэтому проявляется в виде сопротивления (рассеяния мощности) в цепи.
Помимо резистивных потерь в проводе и излучения, в индукторах с железным сердечником действуют и другие эффекты, которые проявляются как дополнительное сопротивление между выводами.Когда на индуктор подается переменный ток, создаваемые переменные магнитные поля имеют тенденцию индуцировать циркулирующие токи в железном сердечнике, известные как вихревые токи , . Эти электрические токи в железном сердечнике должны преодолевать электрическое сопротивление, обеспечиваемое железом, который не так хорош в качестве проводника, как медь. Вихретоковым потерям в первую очередь противодействуют, разделив железный сердечник на множество тонких листов (пластин), каждый из которых отделен от другого тонким слоем электроизоляционного лака.Поскольку поперечное сечение сердечника разделено на множество электрически изолированных участков, ток не может циркулировать в пределах этой площади поперечного сечения, и из-за этого не будет (или будет очень мало) резистивных потерь.
Как и следовало ожидать, потери на вихревые токи в металлических сердечниках индуктора проявляются в виде тепла. Эффект более выражен на высоких частотах и может быть настолько сильным, что иногда его используют в производственных процессах для нагрева металлических предметов! Фактически, этот процесс «индукционного нагрева» часто используется при литье металлов высокой чистоты, где металлические элементы и сплавы должны нагреваться в вакууме, чтобы избежать загрязнения воздухом, и, следовательно, там, где стандартная технология нагрева сжиганием была бы бесполезной.Это «бесконтактная» технология, когда нагретое вещество не должно касаться катушки (катушек), создающей магнитное поле.
В высокочастотной среде вихревые токи могут возникать даже в поперечном сечении самого провода, способствуя дополнительным резистивным эффектам. Чтобы противодействовать этой тенденции, можно использовать специальный провод, сделанный из очень тонких, индивидуально изолированных жил, который называется Litz wire (сокращенно от Litzendraht ). Изоляция, отделяющая жилы друг от друга, предотвращает циркуляцию вихревых токов по всей площади поперечного сечения провода.
Кроме того, любой магнитный гистерезис, который необходимо преодолевать при каждом изменении направления магнитного поля индуктора, представляет собой расход энергии, который проявляется как сопротивление в цепи. Некоторые материалы сердечника (например, феррит) особенно известны своим гистерезисным эффектом. Противодействовать этому эффекту лучше всего за счет правильного выбора материала сердечника и ограничения пиковой напряженности магнитного поля, генерируемой в каждом цикле.
В целом паразитные резистивные свойства реального индуктора (сопротивление провода, радиационные потери, вихревые токи и гистерезисные потери) выражаются одним термином «эффективное сопротивление»:
Рисунок 6.9 Эквивалентная схема реального индуктора с потерями на скин-эффект, излучение, вихревые токи и гистерезис.
Следует отметить, что скин-эффект и потери на излучение применимы к прямым отрезкам провода в цепи переменного тока так же хорошо, как и к спиральному проводу. Обычно их совокупный эффект слишком мал, чтобы его можно было заметить, но на радиочастотах они могут быть довольно большими. Например, антенна радиопередатчика спроектирована специально для рассеивания наибольшего количества энергии в виде электромагнитного излучения.
Конденсаторы Vs. Резисторы
Конденсаторы ведут себя иначе, чем резисторы. В то время как резисторы пропускают через себя поток электронов, прямо пропорциональный падению напряжения, конденсаторы противодействуют изменениям напряжения, потребляя или подавая ток, когда они заряжаются или разряжаются до нового уровня напряжения. Поток электронов «через» конденсатор прямо пропорционален скорости изменения напряжения на конденсаторе. Это противодействие изменению напряжения является другой формой реактивного сопротивления , но оно прямо противоположно тому, которое демонстрируют индукторы.
Характеристики цепи конденсатора
Выражаясь математически, соотношение между током, протекающим через конденсатор, и скоростью изменения напряжения на конденсаторе выглядит следующим образом:
[латекс] i = C \ frac {d_e} {d_t} [/ латекс]
Выражение de / dt – это выражение из расчетов, означающее скорость изменения мгновенного напряжения (e) во времени в вольтах в секунду. Емкость (C) выражается в фарадах, а мгновенный ток (i), конечно, выражается в амперах.Иногда скорость мгновенного изменения напряжения с течением времени выражается как dv / dt вместо de / dt: вместо напряжения используется строчная буква «v» или «e», но это означает то же самое. Чтобы показать, что происходит с переменным током, давайте проанализируем простую схему конденсатора:
Рисунок 6.10 Чистая емкостная цепь: напряжение конденсатора отстает от тока конденсатора на 90 °
Если бы мы изобразили ток и напряжение для этой очень простой схемы, это выглядело бы примерно так:
Рисунок 6.11 Формы сигналов чисто емкостной цепи.
Помните, что ток через конденсатор – это реакция на изменение напряжения на нем. Следовательно, мгновенный ток равен нулю всякий раз, когда мгновенное напряжение находится на пике (нулевое изменение или наклон уровня на синусоидальной волне напряжения), а мгновенный ток находится на пике везде, где мгновенное напряжение имеет максимальное изменение (точки самый крутой наклон на волне напряжения, где она пересекает нулевую линию).Это приводит к появлению волны напряжения, которая на -90 ° не совпадает по фазе с волной тока. Глядя на график, кажется, что волна тока имеет «фору» по сравнению с волной напряжения; ток «опережает» напряжение, а напряжение «отстает» от тока.
Рисунок 6.12 Напряжение отстает от тока на 90 ° в чисто емкостной цепи.
Как вы могли догадаться, та же необычная волна мощности, которую мы видели в простой цепи индуктивности, присутствует и в простой цепи конденсатора:
Рисунок 6.13 В чисто емкостной цепи мгновенная мощность может быть положительной или отрицательной.
Как и в случае с простой схемой индуктивности, сдвиг фазы на 90 градусов между напряжением и током приводит к появлению волны мощности, которая в равной степени чередуется между положительной и отрицательной полярностью. Это означает, что конденсатор не рассеивает мощность, поскольку он реагирует на изменения напряжения; он просто поочередно поглощает и высвобождает энергию.
Реактивное сопротивление конденсатора
Противодействие конденсатора изменению напряжения означает сопротивление переменному напряжению в целом, которое по определению всегда изменяется по мгновенной величине и направлению.Для любой данной величины переменного напряжения на данной частоте конденсатор данного размера будет «проводить» определенную величину переменного тока. Так же, как ток через резистор является функцией напряжения на резисторе и сопротивления, предлагаемого резистором, переменный ток через конденсатор является функцией переменного напряжения на нем и реактивного сопротивления , обеспечиваемого конденсатором. Как и в случае катушек индуктивности, реактивное сопротивление конденсатора выражается в омах и обозначается буквой X (или, точнее, X C ).
Поскольку конденсаторы «проводят» ток пропорционально скорости изменения напряжения, они будут пропускать больше тока при более быстром изменении напряжения (поскольку они заряжаются и разряжаются до тех же пиков напряжения за меньшее время) и меньший ток при более медленном изменении напряжения. . Это означает, что реактивное сопротивление в Ом для любого конденсатора составляет обратно пропорционально частоте переменного тока .
[латекс] X_C = \ frac {1} {2πfC} [/ латекс]
Реактивное сопротивление конденсатора 100 мкФ:| Частота (Герцы) | Реактивное сопротивление (Ом) |
| 60 | 26.5258 |
| 120 | 13,2629 |
| 2500 | 0,6366 |
Обратите внимание, что отношение емкостного реактивного сопротивления к частоте прямо противоположно отношению индуктивного реактивного сопротивления. Емкостное реактивное сопротивление (в омах) уменьшается с увеличением частоты переменного тока. И наоборот, индуктивное реактивное сопротивление (в омах) увеличивается с увеличением частоты переменного тока. Индукторы противодействуют более быстрому изменению токов, создавая большие падения напряжения; Конденсаторы противодействуют более быстрому изменению падений напряжения, допуская большие токи.
Как и в случае с индукторами, член 2πf в уравнении реактивного сопротивления может быть заменен строчной греческой буквой Омега (ω), которая обозначается как угловая скорость цепи переменного тока. Таким образом, уравнение X C = 1 / (2πfC) также может быть записано как X C = 1 / (ωC), с приведением ω в единицах радиан в секунду .
Переменный ток в простой емкостной цепи равен напряжению (в вольтах), деленному на емкостное реактивное сопротивление (в омах), точно так же, как переменный или постоянный ток в простой резистивной цепи равен напряжению (в вольтах), деленному на сопротивление (в Ом).Следующая схема иллюстрирует это математическое соотношение на примере:
Емкостное реактивное сопротивление.
[латекс] X_C = 26,5258 Ом [/ латекс]
[латекс] I = \ frac {E} {X} [/ латекс]
[латекс] I = \ frac {10} {26,5258 Ом} [/ латекс]
[латекс] I = 0,3770A [/ латекс]
Однако нужно иметь в виду, что здесь напряжение и ток не совпадают по фазе. Как было показано ранее, ток имеет фазовый сдвиг + 90 ° по отношению к напряжению.Если мы математически представим эти фазовые углы напряжения и тока, мы сможем вычислить фазовый угол реактивного сопротивления конденсатора току.
Напряжение в конденсаторе отстает от тока на 90 °.
Математически мы говорим, что фазовый угол сопротивления конденсатора току составляет -90 °, что означает, что сопротивление конденсатора току является отрицательной мнимой величиной. (См. Рисунок выше.) Этот фазовый угол реактивного противодействия току становится критически важным при анализе цепей, особенно для сложных цепей переменного тока, где реактивное сопротивление и сопротивление взаимодействуют.Будет полезно представить любую оппозицию компонента току в виде комплексных чисел, а не только скалярных величин сопротивления и реактивного сопротивления.
- Емкостное реактивное сопротивление – это противодействие, которое конденсатор предлагает переменному току из-за его сдвинутого по фазе накопления и выделения энергии в его электрическом поле. Реактивное сопротивление обозначается заглавной буквой «X» и измеряется в омах, как и сопротивление (R).
- Емкостное реактивное сопротивление можно рассчитать по следующей формуле: XC = 1 / (2πfC)
- Емкостное реактивное сопротивление уменьшается с увеличением частоты .Другими словами, чем выше частота, тем меньше он противодействует (тем больше «проводит») переменному току.
Используя компоненты с одинаковыми значениями в нашей схеме последовательного примера, мы подключим их параллельно и посмотрим, что произойдет:
Рисунок 6.14 Параллельная цепь RC.
Параллельный резистор и конденсатор
Поскольку источник питания имеет ту же частоту, что и схема последовательного примера, а резистор и конденсатор имеют одинаковые значения сопротивления и емкости, соответственно, они также должны иметь одинаковые значения импеданса.Итак, мы можем начать нашу таблицу анализа с тех же «заданных» значений:
Таблица 6.7Сейчас это параллельная схема, мы знаем, что напряжение распределяется поровну между всеми компонентами, поэтому мы можем поместить цифру для общего напряжения (10 вольт 0 °) во все столбцы:
Таблица 6.8 Расчетпо закону Ома
Теперь мы можем применить закон Ома (I = E / Z) по вертикали к двум столбцам таблицы, вычислив ток через резистор и ток через конденсатор:
Таблица 6.9Так же, как и в цепях постоянного тока, токи ответвления в параллельной цепи переменного тока складываются в общий ток (снова Закон Кирхгофа):
Таблица 6.10Наконец, общий импеданс можно рассчитать с помощью закона Ома (Z = E / I) по вертикали в столбце «Всего». Как мы видели в главе об индуктивности переменного тока, параллельный импеданс также можно рассчитать, используя обратную формулу, идентичную той, которая используется при вычислении параллельных сопротивлений. Следует отметить, что это правило параллельного импеданса остается в силе независимо от типа импедансов, подключенных параллельно.Другими словами, не имеет значения, рассчитываем ли мы схему, состоящую из параллельных резисторов, параллельных катушек индуктивности, параллельных конденсаторов или какой-либо их комбинации: в форме импедансов (Z) все термины являются общими и могут применяться равномерно по той же формуле. И снова формула параллельного импеданса выглядит так:
[латекс] Z_ {parallel} = \ frac {1} {\ frac {1} {Z_1} + \ frac {1} {Z_2} + \ dots \ frac {1} {Z_n}} [/ латекс]
Единственным недостатком использования этого уравнения является значительный объем работы, необходимой для его вычисления, особенно без помощи калькулятора, способного манипулировать сложными величинами.Независимо от того, как мы рассчитываем полное сопротивление для нашей параллельной цепи (закон Ома или обратная формула), мы получим ту же цифру:
- Импедансом (Z) управляют так же, как и сопротивлением (R) при анализе параллельной цепи: параллельные импедансы уменьшаются, образуя общий импеданс, с использованием обратной формулы. Только не забудьте
- выполнять все вычисления в комплексном (не скалярном) виде! ZTotal = 1 / (1 / Z1 + 1 / Z2 +.. 1 / Zn)
- Закон Ома для цепей переменного тока: E = IZ; I = E / Z; Z = E / I
- Когда резисторы и конденсаторы смешиваются вместе в параллельных цепях (так же, как в последовательных цепях), общий импеданс будет иметь фазовый угол где-то между 0 ° и -90 °.Ток в цепи будет иметь фазовый угол от 0 ° до + 90 °.
- Параллельные цепи переменного тока обладают теми же фундаментальными свойствами, что и параллельные цепи постоянного тока: напряжение равномерно по всей цепи, токи ответвления складываются, чтобы сформировать общий ток, а импедансы уменьшаются (по обратной формуле), чтобы сформировать общий импеданс.
(Следующий раздел был адаптирован из: Уроки электрических цепей, Том II, Глава 5 – Реактивное сопротивление и импеданс – R, L и C)
Прежде чем мы начнем исследовать влияние резисторов, катушек индуктивности и конденсаторов, соединенных вместе в одних и тех же цепях переменного тока, давайте кратко рассмотрим некоторые основные термины и факты.
Сопротивление
Это по сути трение против тока. В некоторой степени он присутствует во всех проводниках (кроме проводов super !), Особенно в резисторах. Когда переменный ток проходит через сопротивление, возникает падение напряжения, синфазное с током. Сопротивление математически обозначается буквой «R» и измеряется в омах (Ом).
Реактивное сопротивление
Это по сути инерция против тока.Он присутствует везде, где электрические или магнитные поля развиваются пропорционально приложенному напряжению или току, соответственно; но особенно в конденсаторах и катушках индуктивности. Когда переменный ток проходит через чистое реактивное сопротивление, возникает падение напряжения, которое на 90 ° не совпадает по фазе с током. Реактивное сопротивление математически обозначается буквой «X» и измеряется в омах (Ом).
Импеданс
Это исчерпывающее выражение любых форм противодействия протеканию тока, включая как сопротивление, так и реактивное сопротивление.Он присутствует во всех схемах и во всех компонентах. Когда переменный ток проходит через полное сопротивление, возникает падение напряжения, которое находится где-то между 0 ° и 90 ° не в фазе с током. Импеданс математически обозначается буквой «Z» и измеряется в единицах Ом (Ом) в сложной форме.
Идеальные резисторы обладают сопротивлением, но не реактивным сопротивлением. Идеальные катушки индуктивности и идеальные конденсаторы обладают реактивным сопротивлением, но не имеют сопротивления. Все компоненты обладают импедансом, и из-за этого универсального качества имеет смысл перевести все значения компонентов (сопротивление, индуктивность, емкость) в общие термины импеданса в качестве первого шага при анализе цепи переменного тока.
Рис. 6.15. Идеальный резистор, катушка индуктивности и конденсатор.Фазовый угол импеданса для любого компонента – это фазовый сдвиг между напряжением на этом компоненте и током через этот компонент. Для идеального резистора падение напряжения и ток всегда синфазны друг с другом, поэтому угол импеданса резистора считается равным 0 °. Для идеального индуктора падение напряжения всегда опережает ток на 90 °, поэтому фазовый угол импеданса индуктора равен + 90 °.Для идеального конденсатора падение напряжения всегда отстает от тока на 90 °, поэтому считается, что фазовый угол импеданса конденсатора составляет -90 °.
Полное сопротивление переменного тока ведет себя аналогично сопротивлению в цепях постоянного тока: они добавляются последовательно и уменьшаются параллельно. Пересмотренная версия закона Ома, основанная на импедансе, а не на сопротивлении, выглядит так:
Закон Ома для цепи переменного тока
[латекс] \ begin {align} \ tag {6.2} \ text {E} & = {I} {Z} \\ \ text {I} & = \ frac {E} {Z} \\ \ text {Z } & = \ frac {E} {I} \ end {align} [/ latex]
Мы можем взять те же компоненты из последовательной схемы и переставить их в параллельную конфигурацию для простого примера схемы:
Рисунок 6.16 Пример параллельной схемы R, L и C.Импеданс в параллельных компонентах
Тот факт, что эти компоненты соединены параллельно, а не последовательно, теперь абсолютно не влияет на их индивидуальные импедансы. Пока источник питания имеет ту же частоту, что и раньше, индуктивное и емкостное сопротивление вообще не изменится.
Рисунок 6.17 Пример параллельной цепи R, L и C с импедансами, заменяющими значения компонентов.Со всеми значениями компонентов, выраженными как импедансы (Z), мы можем настроить таблицу анализа и действовать, как в предыдущем примере задачи, за исключением того, что на этот раз следуя правилам параллельных цепей вместо последовательного.
Зная, что напряжение распределяется поровну между всеми компонентами в параллельной цепи, мы можем перенести цифру для общего напряжения во все столбцы компонентов в таблице:
Значения компонентов в таблице 6.11 выражаются в виде импеданса изображения 2Теперь мы можем применить закон Ома (I = E / Z) по вертикали в каждом столбце, чтобы определить ток через каждый компонент:
Таблица 6.12. Значения компонентов выражаются как изображение импеданса 3Расчет полного тока и полного импеданса
Существует две стратегии расчета полного тока и полного сопротивления.Во-первых, мы могли рассчитать общий импеданс из всех отдельных параллельных сопротивлений (Z Total = 1 / (1 / Z R + 1 / Z L + 1 / Z C ), а затем рассчитать общий ток путем деления напряжения источника на полное сопротивление (I = E / Z).
Тем не менее, работа с уравнением параллельного импеданса с комплексными числами – непростая задача, учитывая все взаимные колебания (1 / Z). Это особенно верно, если вам не повезло, что у вас нет калькулятора, который обрабатывает комплексные числа, и вы вынуждены делать все это вручную (преобразовать индивидуальные импедансы в полярную форму, затем преобразовать их все в прямоугольную форму для сложения, а затем преобразовать обратно в полярную форму для окончательной инверсии, затем инвертировать).Второй способ вычисления общего тока и полного импеданса – это сложить все токи ответвления, чтобы получить общий ток (полный ток в параллельной цепи – переменного или постоянного тока – равен сумме токов ответвления), а затем использовать закон Ома. для определения полного сопротивления по общему напряжению и общему току (Z = E / I).
Таблица 6.13 Расчет общего тока и полного импедансаЛюбой из методов, выполненный должным образом, даст правильные ответы.
За заметным исключением расчетов мощности (P), все расчеты цепей переменного тока основаны на тех же общих принципах, что и расчеты для цепей постоянного тока.Единственное существенное отличие состоит в том, что в расчетах переменного тока используются комплексные величины, в то время как в расчетах постоянного тока используются скалярные величины. Закон Ома, законы Кирхгофа и даже сетевые теоремы, изученные на постоянном токе, остаются верными для переменного тока, когда напряжение, ток и импеданс выражаются комплексными числами. Те же стратегии поиска и устранения неисправностей, которые применяются в цепях постоянного тока, справедливы и для переменного тока, хотя с переменным током, безусловно, труднее работать из-за фазовых углов, которые не регистрируются портативным мультиметром.
Power – это отдельная тема, которая будет рассмотрена в отдельной главе этой книги. Поскольку мощность в реактивной цепи одновременно поглощается и высвобождается, а не просто рассеивается, как в случае с резисторами, ее математическая обработка требует более прямого применения тригонометрии для решения.
При анализе цепи переменного тока первым шагом в анализе является преобразование всех значений компонентов резистора, катушки индуктивности и конденсатора в импедансы (Z) в зависимости от частоты источника питания.После этого выполните те же шаги и стратегии, которые были изучены для анализа цепей постоянного тока, используя новую форму закона Ома: E = IZ; I = E / Z; и Z = E / I
Помните, что только рассчитанные значения, выраженные в полярной форме , применимы непосредственно к эмпирическим измерениям напряжения и тока. Прямоугольные обозначения – это просто полезный инструмент для сложения и вычитания сложных величин. Полярная запись, где величина (длина вектора) напрямую связана с величиной измеряемого напряжения или тока, а угол напрямую связан с фазовым сдвигом в градусах, является наиболее практичным способом выражения сложных величин для анализа схем.
Что такое реактивная мощность и почему это важно? | Дракс | Drax
Откройте для себя бесшумную силу, которая «качает» электричество по сети.
Электричество, которое включает лампочки и заряжает телефоны. называется «активной мощностью». Однако для эффективного, экономичного и безопасного перемещения активной мощности по стране требуется нечто, называемое «реактивной мощностью».
Насос, питающий электричество
Реактивная мощность вырабатывается так же, как активная мощность, на больших электростанциях, но подается в систему немного другим способом.
Далеко не уедет. Так сеть региональных распределителей реактивной мощности обслуживает локальных участков на квартала.
Электростанции – не единственный источник реактивной мощности. Электронные устройства, такие как ноутбуки и телевизоры, также вырабатывают и возвращают небольшие количества реактивной мощности обратно в сеть. Это может увеличить количество реактивной мощности в сети, поэтому электростанции должны поглощать избыток.
Это потому, что, хотя реактивная мощность важна, более важно иметь правильную величину в сети.Если их слишком много, линии электропередач могут оказаться перегруженными, что приведет к нестабильности в сети. Слишком мало – снижает эффективность.
Управление реактивной мощностью обеспечивает подачу активной мощности в нужные места. Но это также означает контроль напряжения в сети.
Как контроль напряжения сдерживает волатильность
По всей Великобритании вся электроэнергия в национальной сети должна работать при одинаковом напряжении (400 кВ или 275 кВ).Отклонение всего на 5% в любую сторону может привести к повреждению оборудования или крупномасштабным отключениям электроэнергии.
National Grid ESO, системный оператор, контролирует и управляет общенациональным уровнем напряжения, чтобы гарантировать, что он остается в безопасных пределах, и это зависит от управления реактивной мощностью.
Ян Фой, руководитель вспомогательных служб Drax, объясняет: «Когда кабели« слабо загружены », например, ночью, когда спрос на электроэнергию ниже, они начинают излучать реактивную мощность, вызывая повышение напряжения.»
Реактивная мощность – обзор
4.3 Регулирование реактивной мощности биогазовой системы
Реактивная мощность может быть указана как количество« неиспользованной »мощности, которая вырабатывается реактивными компонентами, такими как катушки индуктивности или конденсаторы переменного тока ( Переменного тока) цепей. Для повышения производительности системы питания переменного тока необходимо эффективно управлять реактивной мощностью; это называется компенсацией реактивной мощности. Проблема компенсации реактивной мощности имеет два аспекта: компенсация нагрузки и поддержка напряжения.Компенсация нагрузки включает улучшение коэффициента мощности, балансировку реальной мощности, потребляемой от источника питания, лучшее регулирование напряжения и т. Д. Больших колеблющихся нагрузок. Поддержка напряжения заключается в снижении колебаний напряжения на заданном конце линии передачи. Можно использовать два типа компенсации: последовательная и шунтирующая. Они изменили параметры системы, чтобы обеспечить улучшенную компенсацию вольт-амперной реактивной мощности (VAR). Они вполне подходят для работы по поглощению или генерации реактивной мощности с более быстрым откликом и относятся к гибким системам передачи переменного тока (FACTS).Это позволит увеличить передачу полной мощности по линии передачи и значительно улучшить стабильность за счет регулировки параметров, которые управляют энергосистемой, то есть тока, напряжения, фазового угла, частоты и импеданса. Чтобы управлять потоком мощности в системе, необходимо контролировать реактивную мощность в линии передачи. Существует множество различных устройств FACT, которые используются для компенсации реактивной мощности в линии передачи. К различным методам FACT относятся статический компенсатор реактивной мощности (SVC), статический синхронный последовательный компенсатор (SSSC), статический синхронный компенсатор (STATCOM), унифицированный контроллер потока мощности (UPFC) и т. Д.; Напряжения на шинах, фазовые углы и полное сопротивление линий в энергосистеме можно регулировать быстро и гибко. Следовательно, устройства FACT могут развивать способность передачи мощности, облегчать управление потоком мощности, снижать стоимость генерации и улучшать стабильность и безопасность системы. SSSC – это устройство FACT, которое последовательно подключено к энергосистеме. Он работает как управляемый последовательный индуктор и последовательный конденсатор. Одной из основных особенностей SSSC является то, что его вводимое напряжение управляется отдельно и ни в коем случае не связано с интенсивностью линии.Это позволяет SSSC подходить как для более низких, так и для более высоких нагрузок. UPFC ассоциируется с устройствами FACT, которые имеют поразительные особенности. Он имеет возможность управлять всеми параметрами, которые влияют на поток энергии в линии передачи. Он считается наиболее совершенным методом управления потоком энергии. Он состоит из последовательного преобразователя и шунтирующего преобразователя, соединенного конденсатором звена постоянного тока, которые в совокупности могут выполнять функцию управления потоком активной / реактивной мощности в линии передачи.Напряжение шины UPFC и реактивная мощность шунта регулируются шунтирующим преобразователем. В то время как реальная и активная мощность линии передачи регулируется последовательным преобразователем путем подачи последовательного напряжения изменяемой величины и фазового угла. Параллельная часть, которая представляет собой СТАТКОМ, вводит синусоидальный ток переменной величины. SVC является частью устройства FACT, которое регулирует напряжение, гармоники и коэффициент мощности, а также стабилизирует систему. SVC – это автомат для согласования импеданса, который используется при проектировании, чтобы приблизить коэффициент мощности системы к единице.Есть две основные ситуации, в которых используются SVC: когда они подключены к энергосистеме для регулирования напряжения передачи, и когда они подключены рядом с крупными промышленными нагрузками для улучшения качества электроэнергии. SVC использует реактор с тиристорным управлением (TCR) для понижения напряжения и потребления реактивной мощности из системы в случае емкостной (ведущей). В индуктивном случае (запаздывание) автоматически включается конденсаторная батарея и выдает более высокое напряжение. Результат постоянно меняется, опережает или запаздывает при подключении TCR вместе с батареей конденсаторов.СТАТКОМ – это модифицируемое устройство, которое используется в сети передачи переменного тока. Он работает как источник или приемник реактивной мощности переменного тока. СТАТКОМ также называют статическим синхронным конденсатором. В его основе лежит преобразователь источника напряжения. Существует новый подход, в котором используются твердотельные синхронные источники напряжения для фактического временного управления передачей мощности в системах передачи и динамической компенсации. Создание синхронного источника напряжения стало возможным благодаря многоимпульсному инвертору с запирающими тиристорами.При этом он генерирует реактивную мощность, которая необходима для компенсации сети, а также взаимодействует с подходящим устройством хранения энергии для расчета реальной торговли мощностью с системой переменного тока. Это создает широко распространенное управление потоком мощности для последовательной компенсации, компенсации шунта и управления фазовым углом. Чтобы повысить безопасность системы, устройства FACT используются для управления устройством потока мощности, что дает возможность управлять напряжением и потоками мощности. С прошлых лет STATCOM играет важную роль в регулировании напряжения в системах передачи переменного тока.В линиях электропередачи трехфазного переменного тока часто возникает анализ проблемы перерегулирования напряжения, и обсуждалось ее решение путем продвижения разработки системы регулирования напряжения с использованием устройства FACT STATCOM.
Алгоритм управления реактивной мощностью : Оптимальное распределение реактивной мощности – это нелинейная и смешанно-целочисленная задача оптимизации, которая включает как дискретные, так и непрерывные управляющие переменные. Чтобы найти ситуацию с управляющими переменными, такими как напряжения генератора, положение ответвлений трансформатора с переключением ответвлений и количество устройств компенсации реактивной мощности, запланированный алгоритм используется для оптимизации определенной цели.Потери при передаче мощности, профиль напряжения и стабильность напряжения оптимизируются дискретно. Это означает, что «чистые» пассивные фильтры обеспечивают неадекватные характеристики с точки зрения фильтрации гармоник. При запуске активных фильтров ток источника становится почти синусоидальным, и активный фильтр улучшает фильтрующие характеристики пассивного фильтра (De La Roza et al., 2002). В обоих случаях результат доказывает, что производительность шунтирующего фильтра активной мощности с гибридно-нечетким контроллером лучше, чем с обычным контроллером P-I.Переходный отклик сети энергосистемы был значительно улучшен, а динамический отклик стал быстрее за счет использования гибридного нечеткого контроллера. В настоящее время для компенсации реактивной мощности используется конденсаторно-тиристорный реактор постоянной емкости (FCTCR), управляемый нейронной сетью. Алгоритм, который используется для инструктирования нейронных сетей, – это обратное распространение. При отстающем коэффициенте мощности TCR обеспечивает постоянно контролируемую реактивную мощность. Батарея фиксированных конденсаторов соединена шунтом с TCR для расширения динамического регулируемого диапазона до опережающего коэффициента мощности.Путем выбора подходящего количества индуктивной / емкостной мощности можно компенсировать реактивную мощность. Быстрая и динамическая балансировка системы возможна за счет наличия схемы управления, которая использует компьютерную нейронную сеть, а не традиционное дискретное переключение нагрузки. FCTCR на основе нейронной сети может быстро реагировать на реактивную мощность системы. В длинной линии передачи реактивная мощность играет важную роль в стабильности напряжения и способности передачи мощности в энергосистеме.Для управления реактивной мощностью в длинной ЛЭП обычно используются компенсаторы с параллельным подключением. В условиях малой нагрузки TCR используется для управления реактивной мощностью. Реактивной мощностью в линиях передачи можно управлять, управляя углом включения тиристоров. В систему TCR вводит гармонический ток. Гармоники в токе могут быть доведены до определенного предела, управляя подачей реактивной мощности. Контроллер нечеткой логики реализован для получения наилучшего возможного управления реактивной мощностью компенсатора для поддержания напряжения и гармоник в токе в заданных пределах.Алгоритм, который оптимизирует угол включения в каждом нечетком подмножестве, оценивается для построения правил в Fuzzy Logic Controller. Уникальность алгоритма заключается в том, что он использует простую формулу ошибки для контроля ранга возможных углов зажигания в каждом нечетком подмножестве. Пропорционально-интегрально-производные (ПИД-регуляторы) – это самый простой и наиболее широко используемый метод управления, но основная проблема возникает из-за настройки параметров ПИД-регулятора для соответствия желаемым характеристикам для широкого диапазона рабочих условий.Для различных условий нагрузки самонастраивающийся ПИД-регулятор искусственной нейронной сети (ИНС) сравнивается с контроллером ИНС. Замечено, что ПИД-регулятор на основе ИНС работает быстрее, с меньшим выбросом пиковых значений и временем установления, чем контроллеры ИНС.
Как инвертор мощности генерирует реактивную мощность
Силовой инвертор или инвертор – это силовое электронное устройство или схема, которая преобразует электричество постоянного тока (DC) от таких источников, как батареи или топливные элементы, в переменный ток (AC).
Входное напряжение, выходное напряжение, частота и общая мощность зависят от конструкции конкретного устройства или схемы. Инвертор не производит никакой энергии; питание обеспечивается источником постоянного тока.
Силовые инверторы в основном используются в системах электроснабжения, где присутствуют высокие токи и напряжения.
Реактивная мощность
Реактивная мощность – это мощность, необходимая для поддержания протекания электрического тока и помогающая поддерживать уровни напряжения, необходимые для стабильности системы.
Точно так же, как мы можем думать о реальной энергии, хранящейся в батарее, полезно думать о реактивной мощности как о накопленной в электрическом поле конденсатора или магнитном поле индуктора. В той степени, в которой любая схема сдвигает фазу тока в сторону напряжения (а это может применяться только к цепям переменного тока), ее полное сопротивление считается реактивным. Таким образом, любая схема, включая инвертор, которая имеет индуктивную или емкостную составляющую в своем импедансе, временно сохраняет реактивную мощность в одном или нескольких своих компонентах.Инвертор часто имеет трансформатор как часть цепи, которая подключается к входу переменного тока, и поэтому часто является индуктивной нагрузкой с точки зрения энергетической компании.
Возобновляемые источники энергии, такие как солнечная энергия, обеспечивают не только электричество, но также могут использоваться для выработки реактивной мощности. Чтобы предотвратить отключение электроэнергии, системам возобновляемой энергии также нужны интеллектуальные инверторы для управления потоком энергии и управления пассивной мощностью электрических сетей.
Реактивная мощность не выполняет работу электричества, которую мы все знаем, как зажигание лампы или нагрев воды.Вместо этого система переменного тока потребляет реактивную мощность для поддержания потока электроэнергии.
По мере увеличения количества электроэнергии, протекающей по линии, увеличивается и количество реактивной мощности, необходимой для передачи дополнительной электроэнергии и поддержания надлежащего напряжения. Чем на большее расстояние проходит мощность по линии, тем больше потребляется реактивной мощности. При недостаточной реактивной мощности напряжение падает. Если он продолжит падать, защитное оборудование отключит затронутые электростанции и линии, чтобы защитить их от повреждений.
Как инвертор генерирует реактивную мощность
Мы можем использовать инвертор для выработки реактивной мощности. Чтобы обеспечить только реактивную мощность, источник напряжения, подключенный к основной сети через реактивное сопротивление, должен генерировать напряжение, синфазное с напряжением сети, но с большей амплитудой. Для поглощения реактивной мощности он будет генерировать напряжение, все еще синфазное с напряжением сети, но с меньшей амплитудой.
Инверторы вырабатывают реактивную мощность за счет использования инерционных диодов на каждом из переключателей мощности.Индуктивный характер нагрузки заставляет ее потреблять ток даже после того, как выключатель питания был выключен. Нагрузка показана как асинхронный двигатель, но может быть первичной обмоткой трехфазного трансформатора или любой другой нагрузки переменного тока. Чтобы инвертор мог обрабатывать реактивную мощность, он должен иметь возможность двигаться в обратном направлении и поглощать реактивную энергию. Эта технология называется четырехквадрантной операцией. Инвертор может обеспечивать реактивную мощность в зависимости от размера инвертора, а не только от уровня выработки.Таким образом, если в пасмурном небе вырабатывается солнечная энергия со 100% до 10%, инвертор может использовать остальные 90% своей оставшейся мощности для обеспечения поддержки реактивной мощности и повышения качества электроэнергии в энергосистеме.
Управление реактивной мощностью может быть реализовано несколькими способами – инверторы могут быть настроены на подачу определенного отношения активной и реактивной мощности или настроены на динамическое согласование с требованиями к реактивной мощности нагрузки по мере их изменения с течением времени.
Полная мощность инвертора измеряется в вольт-амперах (ВА).Исторически, когда инверторы работали с единичным коэффициентом мощности, полная номинальная мощность инвертора (ВА) была равна номинальной активной мощности (Вт). Таким образом, эти термины часто использовались как синонимы. Однако в мире управления реактивной мощностью это уже не так, поэтому необходимо четко понимать взаимосвязь между мощностью инвертора и активной мощностью. К счастью, это относительно простое соотношение, показанное в следующей формуле:
Мощность инвертора x коэффициент мощности = активная мощность
Традиционно фотоэлектрические инверторы преднамеренно разрабатывались для подачи такой большой активной мощности (кВт), которая была доступна при единичном коэффициенте мощности. в точку общего соединения (PCC).Совсем недавно коммунальные предприятия и независимые поставщики электроэнергии проявили огромный интерес к способности трехфазного инвертора также поглощать и передавать реактивную мощность Q (кВАр) из сети и в сеть.
Более 95% времени фотоэлектрический инвертор работает ниже номинального выходного тока при преобразовании солнечной энергии постоянного тока в активную мощность переменного тока. Неиспользованная мощность инвертора может быть использована для выработки реактивной мощности. На выходе интеллектуального фотоэлектрического инвертора есть как реактивные, так и активные переменные токи, которые геометрически добавляют к полной мощности, которая будет ограничена номинальным током инвертора.
GZ Industrial Supplies гордится тем, что является первым поставщиком инверторов и аккумуляторов в Нигерии. Вы можете позвонить или посетить любой из наших офисов, чтобы обсудить с нашими экспертами
ep
30 нояб.2020 г. Эрнест Орхуэбор
13 Разница между активной и реактивной мощностью
В предыдущем посте мы узнали о различных типах питания в электрических цепях с помощью принципиальной схемы. Теперь в этом посте мы собираемся изучить разницу между активной и реактивной мощностью.
В чем разница между активной и реактивной мощностью?
Давайте сравним две разные мощности с их спецификациями и примерами в табличной форме.
| Старший № | Содержимое | Активная мощность | Реактивная мощность | |
| 01 | Базовый Определение | Активная мощность от источника 9103 постоянно течет от источника 9342 | . загрузить в электрическую цепь. | Реактивная мощность – это мощность, которая непрерывно течет от источника к нагрузке , а возвращается обратно к источнику в электрической цепи. |
| 02 | Называется как | Активная мощность называется « Реальная мощность » или « Вт полной мощности », или « Истинная мощность » или Фактическая мощность . | Реактивная мощность называется « Мнимая мощность » или « Вт без мощности » или « Бесполезная мощность» или Комплексная мощность . | |
| 03 | Обозначается как | Активная мощность обозначается заглавной буквой « P ». | Реактивная мощность обозначается заглавной буквой « Q ». | |
| 04 | Формула (онлайн-калькулятор мощности) | Вы можете рассчитать активную мощность (P), используя приведенную ниже формулу. Активная мощность = [Напряжение * Ток * Cos (θ)] | Вы можете рассчитать реактивную мощность (Q), используя формулу ниже. Реактивная мощность = [Напряжение * Ток * Sin (θ)] | |
| 05 | Измерительный блок | Измеряется в Вт (Вт) или Киловатт (кВт) или МВт (МВт) ) . | Он измеряется в вольт-амперах, реактивных (ВАр), или киловольт-амперах, реактивных (кВАр), или мегавольт-амперах, реактивных (МВАр). | |
| 06 | Измерительные приборы (Как измерить активную и реактивную мощность?) | Для измерения активной мощности требуется ваттметр . | Для измерения реактивной мощности требуется VARmeter . | |
| 07 | Мощность Направление | Эта мощность течет в только в одном направлении с обратным временем. | Эта мощность течет в в обоих направлениях с соответствующим временем. | |
| 08 | Функция I | Активная мощность используется или рассеивается в цепи через подключенную резистивную нагрузку. | Реактивная мощность сохраняется в цепи через подключенную индуктивную нагрузку. | |
| 09 | Функция II | Потребляет полезной мощности, нагрузки. | Потребляет потребляет меньше энергии на нагрузки. | |
| 10 | Полезная цепь | Работает как в цепи AC , так и в цепи DC . | Работает в цепи переменного тока . | |
| 11 | Рабочая Роль | Преобразует электрическую энергию в другие формы энергии , такие как оптическая, тепловая, механическая. | Не преобразует энергию. Но он производит электрический или магнитный поток. | |
| 12 | Мощность Вклад | В электрической цепи активная мощность вносит вклад в составляющую тока, которая составляет в фазе с напряжением цепи. | В электрической цепи реактивная мощность способствует составляющей тока, которая составляет в противофазе с напряжением цепи. | |
| 13 | Использование | Активная мощность используется в лампах накаливания, духовках, кофеварках, утюге, тостерах, нагревателях, машинах и т. Д. | Реактивная мощность используется в вентиляторе, пылесосе, посудомоечной машине, стиральной машине, компрессоре холодильника, кондиционерах, трансформаторе и т. Д. |
С помощью основных понятий, функций и использования мы имеем дифференцированная активная мощность и реактивная мощность.
Прочитать похожие сравнения:
Если у вас есть какие-либо сомнения или вопросы относительно разницы между активной и реактивной мощностью, спросите меня в разделе комментариев ниже.
Спасибо за чтение!
Если вы цените то, что я делаю здесь, в DipsLab, вам следует принять во внимание:
DipsLab – это самый быстрорастущий и пользующийся наибольшим доверием сайт сообщества инженеров по электротехнике и электронике. Все опубликованные статьи доступны БЕСПЛАТНО всем.
Если вам нравится то, что вы читаете, пожалуйста, купите мне кофе (или 2) в знак признательности.
Это поможет мне продолжать оказывать услуги и оплачивать счета.
Я благодарен за вашу бесконечную поддержку.
Я получил степень магистра в области электроэнергетики. Я работаю и пишу технические руководства по ПЛК, программированию MATLAB и электрике на портале DipsLab.com.
Я счастлив, поделившись своими знаниями в этом блоге. А иногда вникаю в программирование на Python.
Зачем снижать реактивную мощность? Больше мощности – меньше меди
Какие типы реактивной мощности бывают?
Индуктивная реактивная мощность
Двигатели, трансформаторы и устройства управления являются индуктивными нагрузками.При индуктивных нагрузках требуется питание для намагничивающих катушек. Эта мощность называется индуктивной реактивной мощностью. Мы называем векторную сумму активной мощности (P) и индуктивной реактивной мощности (Q1) полной мощностью (S1). В этом примере полная мощность носит индуктивный характер.
Емкостная реактивная мощность
Конденсаторы в электронном оборудовании и длинные кабели представляют собой емкостные нагрузки. При емкостных нагрузках для зарядки этой емкости требуется мощность. Эта мощность называется емкостной реактивной мощностью.Векторная сумма фактической мощности (P) и емкостной реактивной мощности (Q1) называется полной мощностью (S1). В этом примере полная мощность носит емкостной характер. Посмотрите, какие системы компенсации снижают индуктивную и емкостную реактивную мощность.
Степень, в которой энергия используется для индуктивной и емкостной реактивной мощности, обозначается cos-phi. В международном масштабе это называется коэффициентом смещения мощности (dPF). Это соотношение между фактической и полной мощностью основной составляющей (составляющей 50 Гц).
Гармоническая реактивная мощность
В современных установках применяется все больше и больше нелинейных нагрузок. Примерами этого являются, например, выпрямители (блоки питания ноутбуков, серверы) и инверторы в современных ИБП и преобразователях частоты. Характерной чертой нелинейной нагрузки является то, что используемый ток больше не является синусоидальным. Мы также называем искажение тока, возникающее в результате этого гармонического искажения.
Дополнительная мощность, возникающая в результате гармонических искажений, – это то, что мы называем гармонической реактивной мощностью (Qh).Эта реактивная мощность не является ни индуктивной, ни емкостной. Вот почему мы наносим гармоническую реактивную мощность на третью ось, так называемую ось z. Векторная сумма реальной мощности (P) и гармонической слепой мощности (Qh) – опять же – называется полной мощностью (S).
Комбинация видов реактивной мощности
Практика показывает сочетание разных видов реактивной мощности. В приведенном ниже примере возникает гармоническая реактивная мощность, а преобладает индуктивная реактивная мощность.
Запомните:
Коэффициент смещения мощности (dPF или cos-phi) – это отношение фактической мощности в (кВт) к полной мощности основной составляющей 50 Гц.Если гармоники отсутствуют, общий коэффициент мощности (PF) равен коэффициенту мощности смещения (dPF).
Коэффициент мощности (PF) – это соотношение между фактической и полной мощностью при любых обстоятельствах.
